robÓtica - profesaulosuna.com pwp... · los sensores internos, miden el estado de la estructura...
TRANSCRIPT

ROBROBÓÓTICATICAING. SERGIO SAUL OSUNA PERAZAING. SERGIO SAUL OSUNA PERAZA
FEBRERO 2009FEBRERO 2009

¿¿QuQuéé es la es la roboticarobotica??En el termino robot, nos llegan En el termino robot, nos llegan
imimáágenes de maquinas que genes de maquinas que realizan trabajos productivos realizan trabajos productivos he imitacihe imitacióón de movimientos n de movimientos y comportamiento de seres y comportamiento de seres vivos. Desde la antigvivos. Desde la antigüüedad, edad, el hombre ha sentido el hombre ha sentido fascinacifascinacióón por las maquinas n por las maquinas que imitan su figura y los que imitan su figura y los movimientos de seres movimientos de seres animados.animados.
El termino El termino ““robotrobot”” aparece por primera vez aparece por primera vez en 1921, el la obra teatral R.U.R (Rosumen 1921, el la obra teatral R.U.R (Rosum’’s s Universal Robots) del novelista y autor Universal Robots) del novelista y autor dramatico checo Karel Capek, en cuyo dramatico checo Karel Capek, en cuyo idioma la palabra idioma la palabra ““robotarobota”” significa fuerza significa fuerza de trabajo o servidumbre. El termino tiene de trabajo o servidumbre. El termino tiene amplia aceptaciamplia aceptacióón y pronto se aplica a n y pronto se aplica a automatas construidos, en aquellos aautomatas construidos, en aquellos añños, os, donde trataban de imitar movimientos de donde trataban de imitar movimientos de seres vivos, pero tambien de demostrar seres vivos, pero tambien de demostrar ttéécnicas de control remoto, incluyendose cnicas de control remoto, incluyendose en algunos casos funciones sensoriales en algunos casos funciones sensoriales primarias.primarias.

ROBOT INDUSTRIALROBOT INDUSTRIALSurgen de la Surgen de la convergencia de convergencia de
tecnologtecnologíías de control, as de control, automautomáático y, en lo tico y, en lo
particular, del control particular, del control de maquinas de maquinas
herramientas, de los herramientas, de los manipuladores manipuladores
teleoperadosteleoperados y la y la aplicaciaplicacióón de n de
computadoras en computadoras en tiempo real. (robot tiempo real. (robot
industrial PUMA industrial PUMA maquina universal maquina universal programable de programable de ensamblaje).ensamblaje).
El esquema bEl esquema báásico de un robot, consta de un sico de un robot, consta de un sistema mecsistema mecáánico, actuadores, nico, actuadores, sensoressensores y y sistema de control como elemento bsistema de control como elemento báásico sico necesario.necesario.
ESQUEMA GENERAL DEL SISTEMA ESQUEMA GENERAL DEL SISTEMA ROBOTROBOT

En el sistema mecEn el sistema mecáánico puede distinguirse entre el nico puede distinguirse entre el óórgano rgano terminal, el brazo articulado, y un vehterminal, el brazo articulado, y un vehíículo. Desde el punto de culo. Desde el punto de vista del procesamiento de la informacivista del procesamiento de la informacióón, en la robn, en la robóótica se tica se involucra funciones de control de movimientos, percepciinvolucra funciones de control de movimientos, percepcióón y n y planificaciplanificacióón.n.El sistema de control involucra tanto bucles de realimentaciEl sistema de control involucra tanto bucles de realimentacióón n de la informacide la informacióón suministrada por los n suministrada por los sensoressensores internos,internos,como del entorno.como del entorno.Los Los sensoressensores internos, miden el estado de la estructura internos, miden el estado de la estructura mecmecáánica y en particular giros, o desplazamientos relativos nica y en particular giros, o desplazamientos relativos entre articulaciones, velocidades, fuerzas y pares.entre articulaciones, velocidades, fuerzas y pares.

Los Los sensoressensoresexternos permiten externos permiten dotar de sentidos dotar de sentidos
al robot. La al robot. La informaciinformacióón que n que suministra es suministra es
utilizada por el utilizada por el sistema de sistema de
percepcipercepcióón para n para aprender la aprender la realidad del realidad del
entorno.entorno.

Los sistemas de percepciLos sistemas de percepcióón sensorial ,hacen n sensorial ,hacen posible que un robot pueda adaptar posible que un robot pueda adaptar automautomááticamente su comportamiento, en ticamente su comportamiento, en funcifuncióón de las variaciones que se producen en n de las variaciones que se producen en su entorno, generando automsu entorno, generando automááticamente ticamente acciones en funciacciones en funcióón de la comparacin de la comparacióón de n de dicha informacidicha informacióón sensorial con patrones de n sensorial con patrones de referencia. referencia.
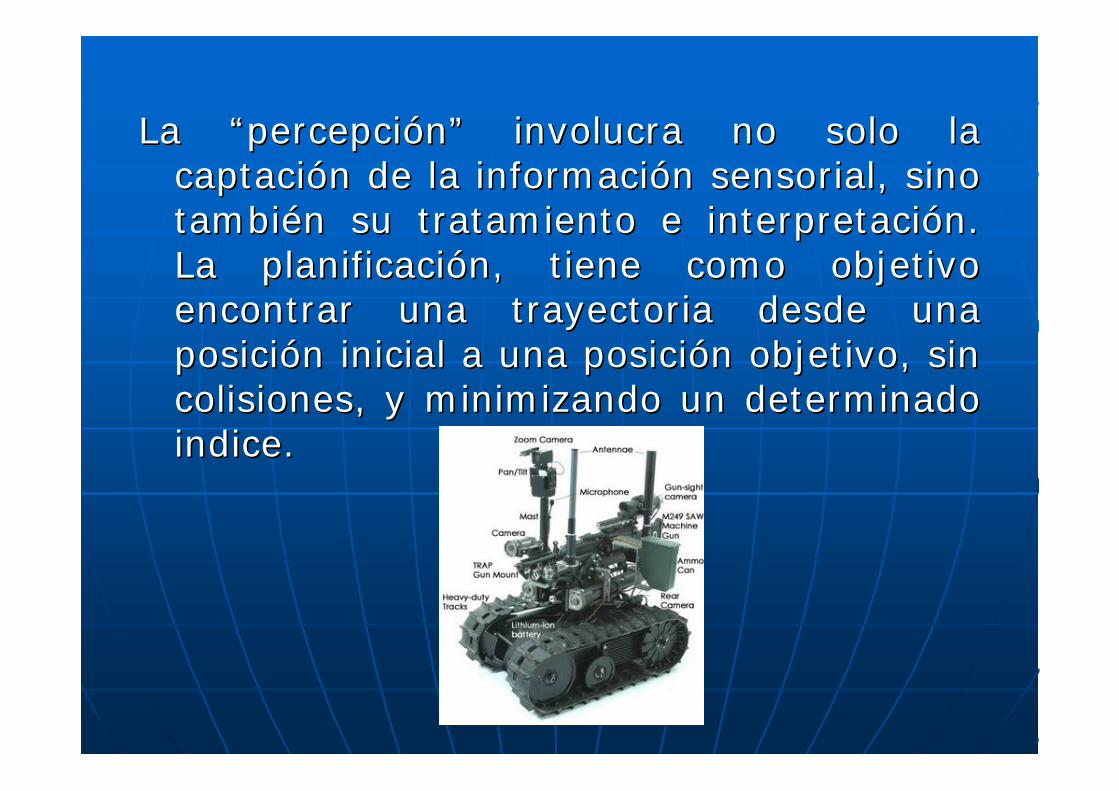
La La ““percepcipercepcióónn”” involucra no solo la involucra no solo la captacicaptacióón de la informacin de la informacióón sensorial, sino n sensorial, sino tambitambiéén su tratamiento e interpretacin su tratamiento e interpretacióón. n. La planificaciLa planificacióón, tiene como objetivo n, tiene como objetivo encontrar una trayectoria desde una encontrar una trayectoria desde una posiciposicióón inicial a una posicin inicial a una posicióón objetivo, sin n objetivo, sin colisiones, y minimizando un determinado colisiones, y minimizando un determinado indiceindice..

En el caso mas simple, el problema se En el caso mas simple, el problema se plantea en un entorno que se supone plantea en un entorno que se supone conocido y es estconocido y es estáático, se supone ademtico, se supone ademáás s que el robot es que el robot es omnidireccionalomnidireccional, que se , que se mueve suficientemente lento y que es mueve suficientemente lento y que es capaz de seguir el camino perfecto.capaz de seguir el camino perfecto.
TIPOS DE ROBOTSTIPOS DE ROBOTSRobots Manipuladores.Robots Manipuladores.Robots MRobots Móóviles.viles.Robots AutRobots Autóónomo y nomo y TelerobTelerobóóticatica..Robots Redundantes.Robots Redundantes.Robot Mano.Robot Mano.Robot Piernas.Robot Piernas.Robot Flexible.Robot Flexible.Robot submarino.Robot submarino.Robot ARobot Aééreo.reo.MicroMicro--robrobóótica.tica.

Robots ManipuladoresRobots ManipuladoresSon esencialmente, Son esencialmente, Brazos articulados. Brazos articulados.
Formada de un Formada de un conjunto de eslabones o conjunto de eslabones o
elementos de cadena elementos de cadena interrelacionados interrelacionados
mediante articulaciones mediante articulaciones y cuentan con un y cuentan con un
elemento al final de la elemento al final de la articulaciarticulacióón llamado n llamado
““efector finalefector final””o o herramienta.herramienta.

Robots MRobots MóóvilesvilesEl desarrollo de este tipo El desarrollo de este tipo de robot, responde a la de robot, responde a la
necesidad de extender el necesidad de extender el campo de aplicacicampo de aplicacióón de la n de la
robrobóótica, restringido tica, restringido inicialmente al alcance de inicialmente al alcance de una estructura mecuna estructura mecáánica nica anclada en uno de sus anclada en uno de sus
extremos. Se trata extremos. Se trata tambitambiéén de incrementar la n de incrementar la autonomautonomíía limitando todo a limitando todo lo posible la intervencilo posible la intervencióón n
humana. humana.

Robot AutRobot Autóónomo y nomo y TelerobTelerobóóticaticaDe acuerdo con su grado de autonomDe acuerdo con su grado de autonomíía, los robots pueden a, los robots pueden clasificarse en clasificarse en teleoperadosteleoperados, de funcionamiento repetitivo y , de funcionamiento repetitivo y autautóónomos e inteligentes. Los nomos e inteligentes. Los teleoperadosteleoperados, son aquellos , son aquellos manipulados por seres humanos en una estacimanipulados por seres humanos en una estacióón remota, son n remota, son modelos utilizados para situaciones complejas. Los repetitivos smodelos utilizados para situaciones complejas. Los repetitivos son on aquellos que se usan en la industria, en las cadenas de aquellos que se usan en la industria, en las cadenas de producciproduccióón, son aquellos que le ahorran al hombre trabajos n, son aquellos que le ahorran al hombre trabajos repetitivos, penosos o incluso peligrosos.repetitivos, penosos o incluso peligrosos.Los robots autLos robots autóónomos e inteligentes, son mas evolucionados en lo nomos e inteligentes, son mas evolucionados en lo que respecta en el procesamiento de informacique respecta en el procesamiento de informacióón, son maquinas n, son maquinas capaces de percibir, modelar el entorno, planificar y actuar parcapaces de percibir, modelar el entorno, planificar y actuar para a alcanzar los objetivos sin la intervencialcanzar los objetivos sin la intervencióón del ser humano. n del ser humano.

Robots Redundantes
Son aquellos utilizados para trabajar en lugares de difícil acceso es necesario añadir grados de libertad a la estructura. Por ello se utilizan manipuladores redundantes con mas de seis grados de libertad. Este tipo de robots presentan complejos problemas de control.

MANOS ROBÓTICAS
Desde finales de los ochenta se han desarrollado órganos terminales muy evolucionados, tales como manos con múltiples dedos para manipulación diestra como la que se muestra.

Piernas Robóticas
Estos robots permiten aislar el cuerpo del terreno empleado únicamente puntos discretos de soporte. Es posible adaptar el polígono de soporte para mantener la estabilidad y pasar sobre obstáculos. por consiguiente, tiene mejores propiedades que las ruedas para atravesar terrenos difíciles llenos de obstáculos. Así mismo, mediante patas, es posible conseguir la omnidireccionalidad y el deslizamiento en la locomoción es mucho mejor.
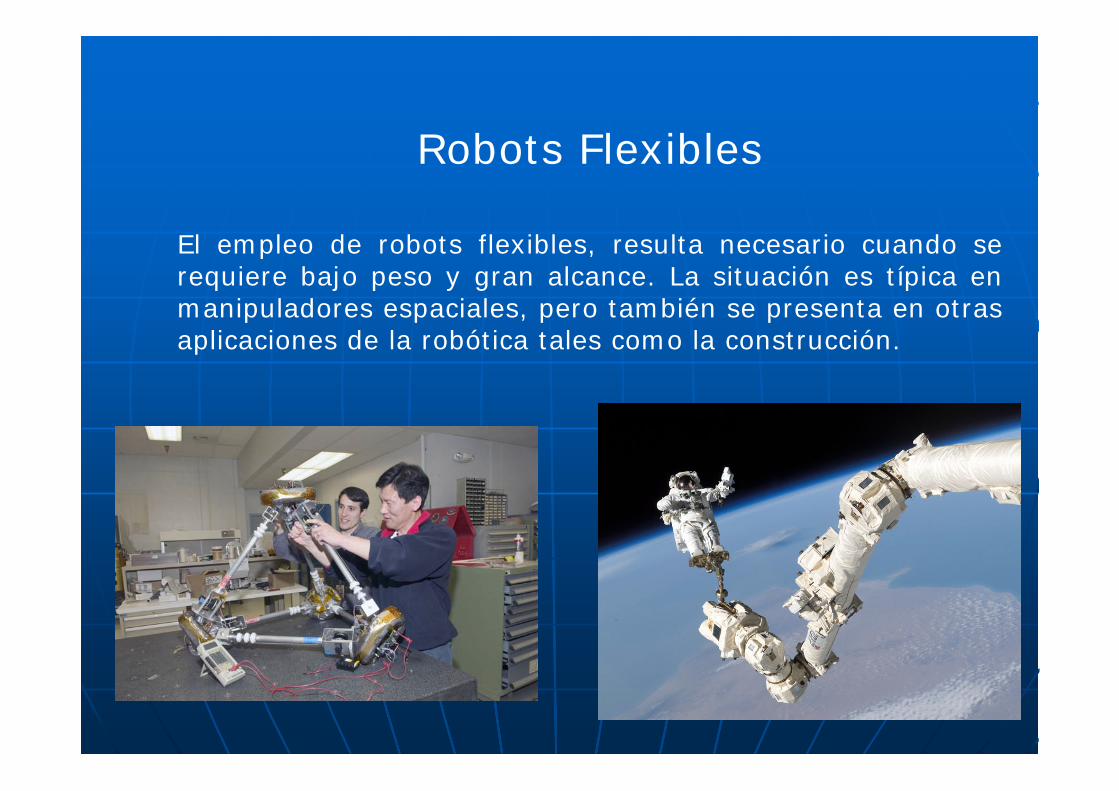
Robots Flexibles
El empleo de robots flexibles, resulta necesario cuando se requiere bajo peso y gran alcance. La situación es típica en manipuladores espaciales, pero también se presenta en otras aplicaciones de la robótica tales como la construcción.

Robot Submarino
El interés de las aplicaciones tales como la inspección, recogida de datos o mantenimiento de instalaciones en entornos naturales a los que el acceso del hombre resulta muy difícil, o casi imposible.
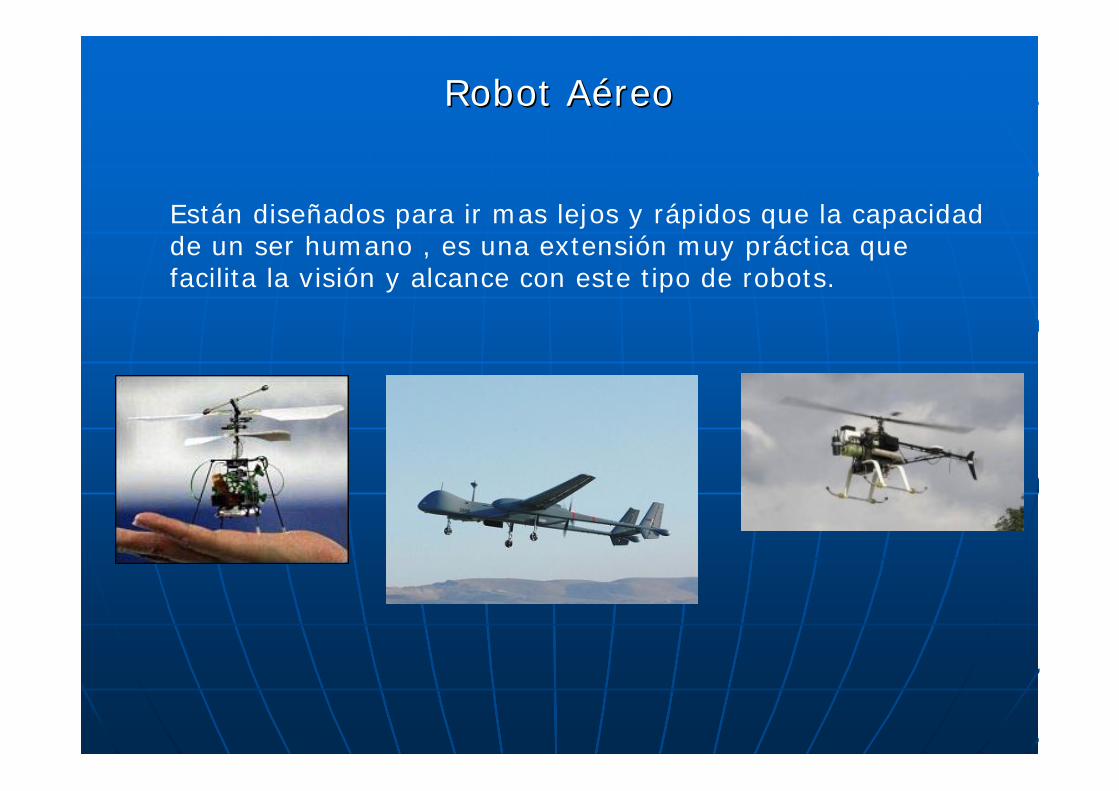
Robot ARobot Aééreoreo
Están diseñados para ir mas lejos y rápidos que la capacidad de un ser humano , es una extensión muy práctica que facilita la visión y alcance con este tipo de robots.

MicroMicro--robrobóóticaticaEl término microrobótica comienza a forjarse por primera vez en la década de los 90. En alguna universidad europea había una serie de investigadores realizó un experimento en el que participaron pequeños robots, de programación rudimentaria, cerrada y escasa en una habitación todos juntos para llevar a cabo una determinada tarea.

Evolución históricaA principios de los 90 la miniaturización de los componentes electrónicos y los microchips se convirtió en uno de los principales avances tecnológicos. Estos avances vinieron motivados por la necesidad de disminuir el peso, volumen, coste y consumo de energía de los productos electrónicos manufacturados.
En este entorno comenzaron a aplicarse los denominados microrobots, como pequeños sistemas de manufacturación que permiten realizar manipulaciones con precisiones del orden de la micra.
Nació entonces la idea de la microrobótica, por la cual un microrobotno es un robot pequeño en tamaño, sino en inteligencia, que programado para hacer una determinada tarea debe colaborar con otras máquinas de forma que hagan una tarea global.

Tipos de MicroTipos de Micro--robotsrobots
LOS RASTREADORES
LOS LUCHADORES DE SUMO

TORNEO PARA EQUIPOS DE FÚTBOL, ROBOCUP
EL POTENCIAL DE LO EL POTENCIAL DE LO SENCILLOSENCILLO
MARK TILDEN Y LA ROBMARK TILDEN Y LA ROBÓÓTICA TICA BEAMBEAM
ROBOTICA BEAMROBOTICA BEAM
BiologyBiology ..-- Los aspectos de diseLos aspectos de diseñño y o y funciones se basan en los seres funciones se basan en los seres vivos.vivos.ElectronicsElectronics ..-- La La circuiteriacircuiteria de de control es muy sencilla. control es muy sencilla. AestheticsAesthetics ..-- El aspecto El aspecto fisicofisico..MechanicsMechanics ..-- Es tan importante Es tan importante como el cerebro. Funcionalidad.como el cerebro. Funcionalidad.

En que consistenEn que consisten

Son pequeSon pequeñños os ““seresseres”” construidos a partir construidos a partir de aparatos electronicos inservibles, de aparatos electronicos inservibles, alambres y con pocos elementos alambres y con pocos elementos electronicos.electronicos.
No se basan en microcontroladores o No se basan en microcontroladores o microprocesadores.microprocesadores.
Su funcionamiento se basa en las Su funcionamiento se basa en las condiciones cambiantes del propio circuito.condiciones cambiantes del propio circuito.
PrPráácticamente se les considera con vida cticamente se les considera con vida propia.propia.
Un ejemplo:Un ejemplo:
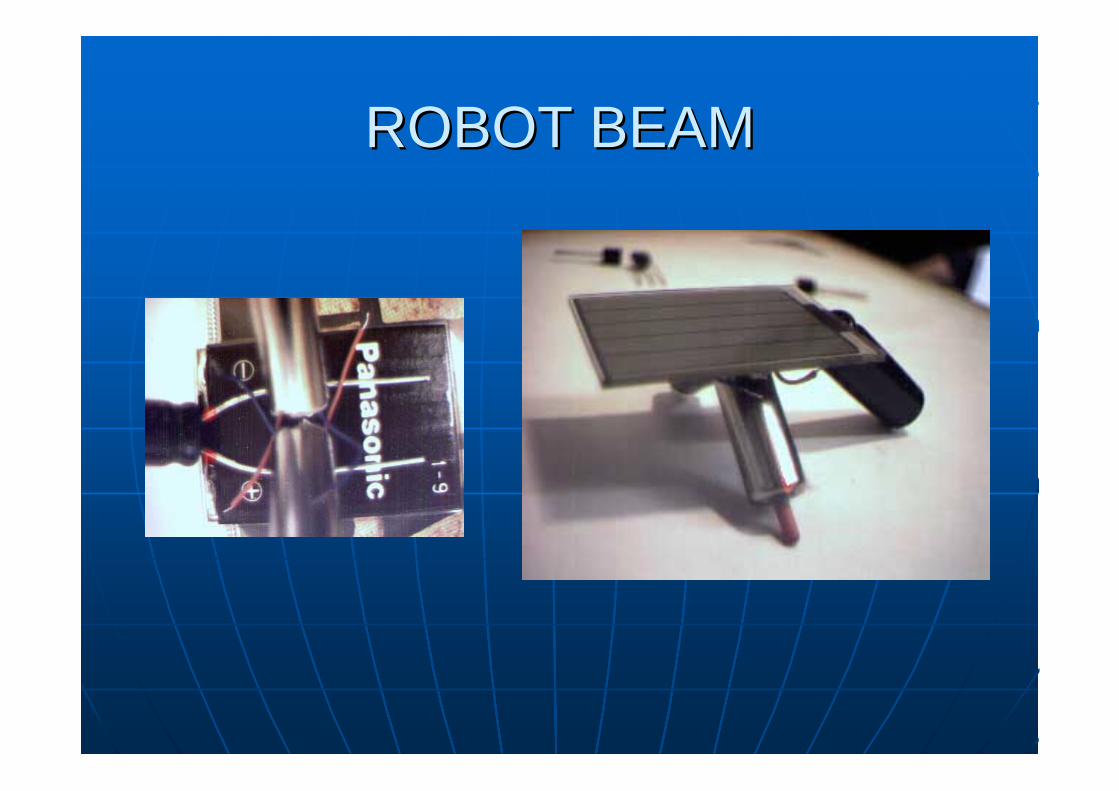
ROBOT BEAMROBOT BEAM

Circuito elementalCircuito elemental

ROBOT BEAMROBOT BEAM
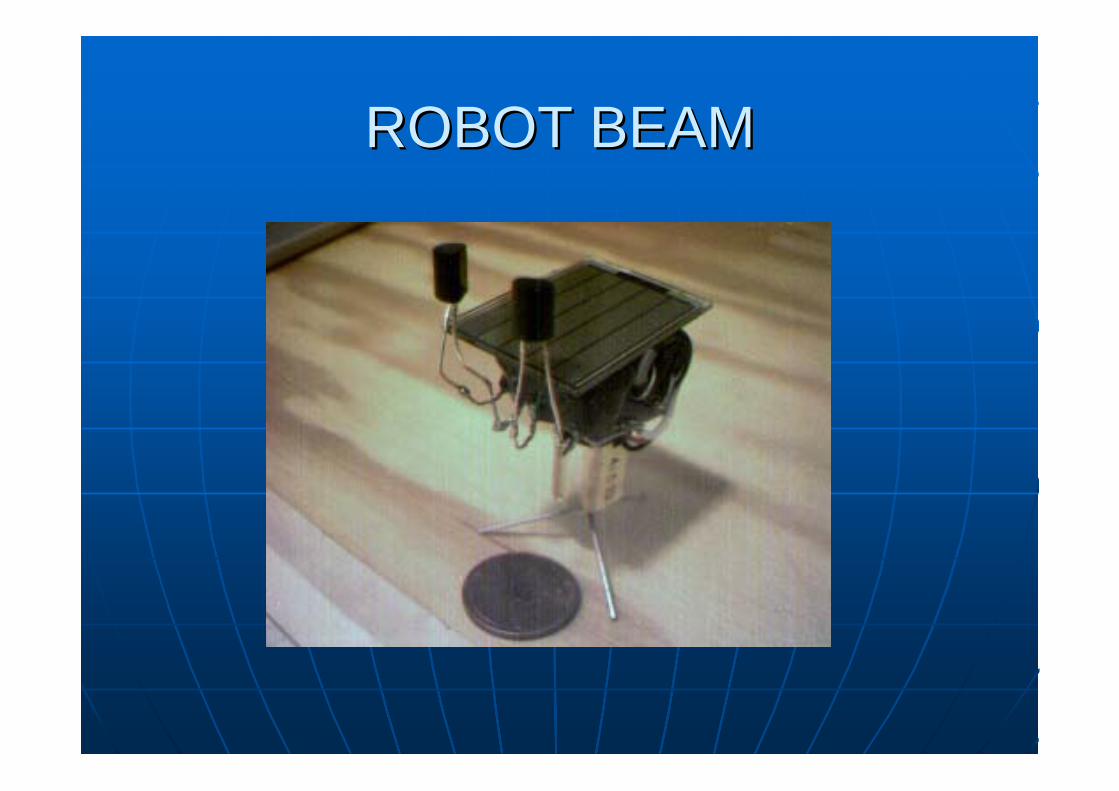
ROBOT BEAMROBOT BEAM

ROBOT BEAMROBOT BEAM

EN LA ACTUALIDADEN LA ACTUALIDAD
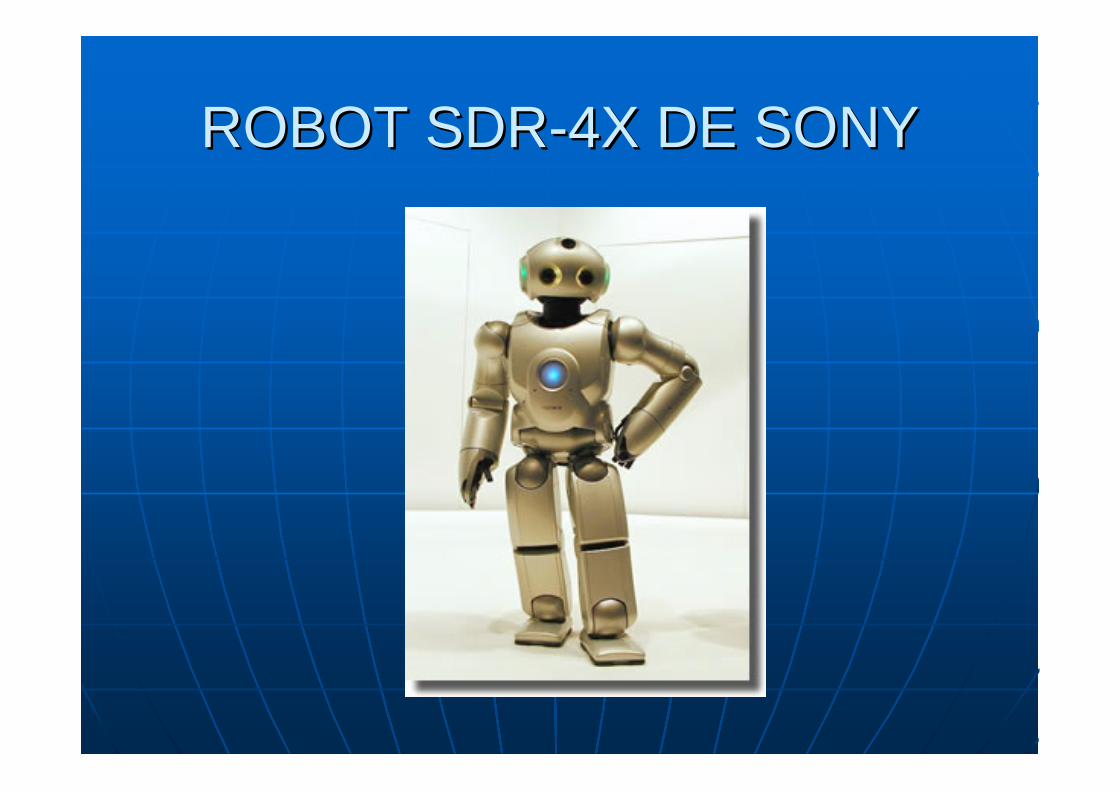
ROBOT SDRROBOT SDR--4X DE SONY4X DE SONY
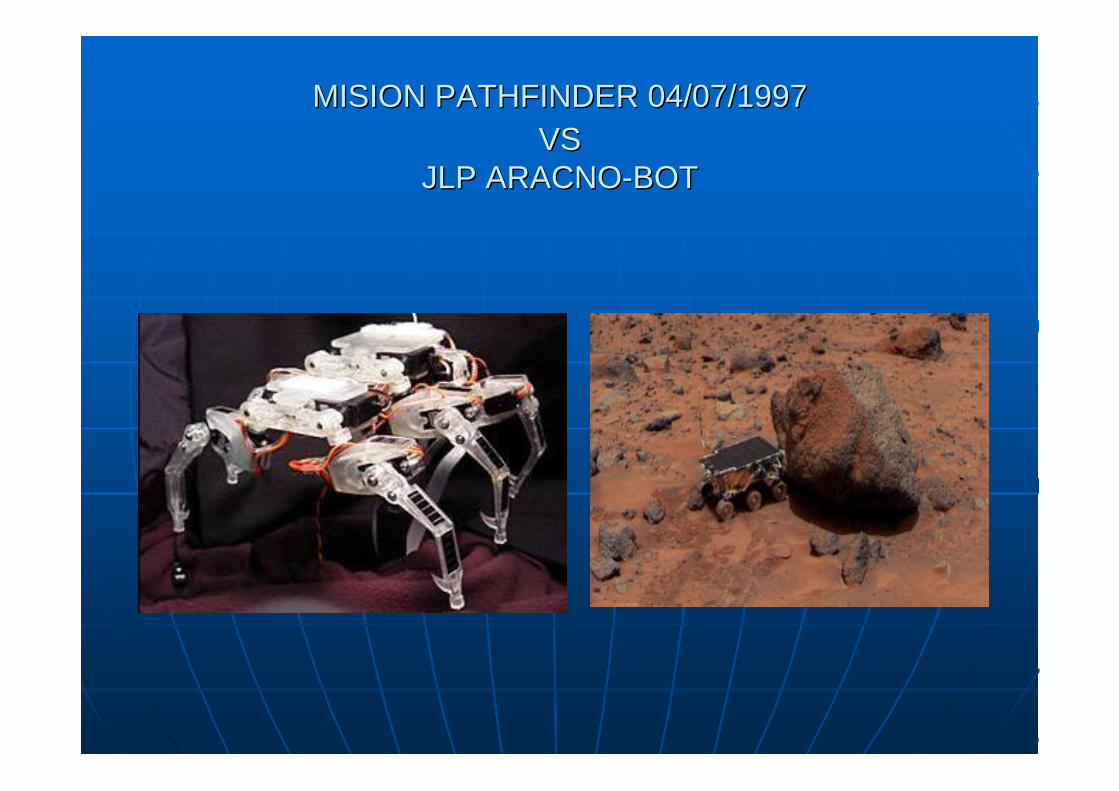
MISION PATHFINDER 04/07/1997MISION PATHFINDER 04/07/1997VS VS
JLP ARACNOJLP ARACNO--BOTBOT


MAS MICRO-ROBOTS

ROBOTS BIPEDOSROBOTS BIPEDOSPEQUEPEQUEÑÑOS ROBOTS CAMINATESOS ROBOTS CAMINATES

ROBONOVA IROBONOVA I
ROBOT BIPEDO DE LA MARCA HITECROBOT BIPEDO DE LA MARCA HITEC

ROBOTS EN EL HOGARROBOTS EN EL HOGAR
Seguridad, educaciSeguridad, educacióón, servicion, servicio……

ee--mail:mail:[email protected]@profesaulosuna.com
!!!!!GRACIAS.. !!!!!GRACIAS.. SALVAJESSALVAJES¡¡¡¡¡¡¡¡¡¡