derivadasdefuncionestrigonométricasroa.uveg.edu.mx/repositorio/licenciatura/167/... · inversas)...
TRANSCRIPT
MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
1
Derivadas de funciones trigonométricas
por Oliverio Ramírez
Debido a su comportamiento, no todos los fenómenos físicos pueden estudiarse y representarse de la misma manera. Algunos fenómenos cómo la oscilación del péndulo, el movimiento de resortes, y la vibración del sonido siguen un comportamiento cíclico que sólo puede representarse con la ayuda de funciones trigonométricas. De forma general podemos decir que existen dos tipos de funciones trigonométricas:
• Las funciones trigonométricas directas que expresan la relación que existe entre los lados de un triángulo rectángulo.
• Las funciones trigonométricas inversas que hacen referencia a los
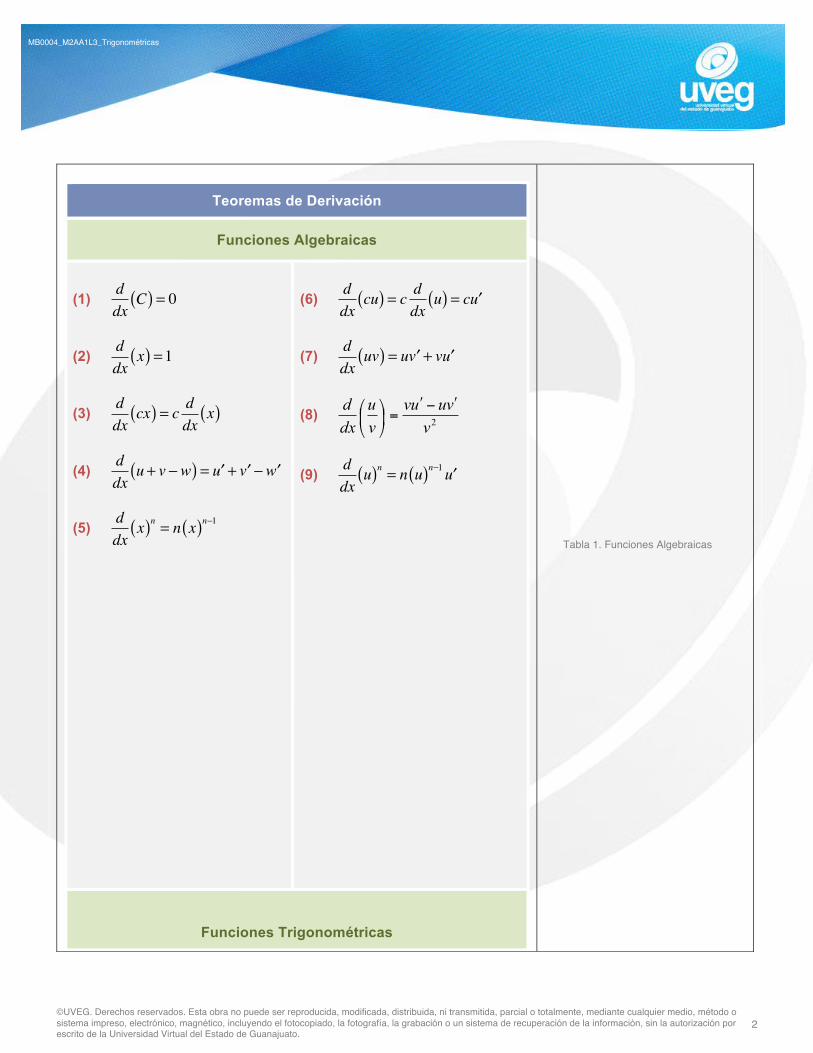
ángulos. En esta lectura estudiaremos los teoremas de derivación para ambos tipos de funciones, con la ayuda de la información que se presenta en el siguiente formulario. Al formulario se le agregan los teoremas de derivación de Funciones Algebraicas, debido a que en ocasiones necesitarás combinar los teoremas de estas funciones para derivar Funciones Trigonométricas directas e inversas.
Al escribir funciones trigonométricas es común omitir el uso de paréntesis y esto puede conducir a errores a la hora de calcular la derivada. Ejemplo:
xseny += 2
En el ejemplo, se pretende que 2+x sea el argumento de la función seno y, para el cálculo de su derivada que represente la función u (teorema 10). Sin embargo, de la forma como está escrita, la función seno sólo está aplicada sobre el número 2 y no sobre la x, la forma correcta de escribirla es:
)2( xseny +=
MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
2
Teoremas de Derivación
Funciones Algebraicas
(1) d
dxC( ) = 0
(2) d
dxx( ) =1
(3) d
dxcx( ) = c
d
dxx( )
(4) d
dxu + v −w( ) = ′u + ′v − ′w
(5) d
dxx( )
n
= n x( )n−1
(6) d
dxcu( ) = c
d
dxu( ) = c ′u
(7) d
dxuv( ) = u ′v + v ′u
(8) 2vvuuv
vu
dxd ʹ′−ʹ′
=⎟⎠
⎞⎜⎝
⎛
(9) d
dxu( )
n
= n u( )n−1
′u
Funciones Trigonométricas
Tabla 1. Funciones Algebraicas

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
3
Funciones Trigonométricas Directas
Funciones Trigonométricas Inversas
(10) ')(cos)( uuusendxd
=
(11) ')()(cos uusenudxd
−=
(12) ')(sec)(tan 2 uuudxd
=
(13) ')csc()(cot 2 uuudxd
−=
(14)
')sec(tan)(sec uuuudxd
=
(15)
')csccot()(csc uuuudxd
−=
(16) 21
')(uuusenarc
dxd
−=
(17) 21
')cos(uuuarc
dxd
−−=
(18) 21')tan(uuuarc
dxd
+=
(19) 21')cot(uuuarc
dxd
+−=
(20) 1
')sec(2 −
=uuuuarc
dxd
(21)
1')csc(2 −
−=uuuuarc
dxd
Tabla 2. Funciones Trigonométricas

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
4
Derivación de funciones trigonométricas directas. Ejemplo 1
Calcula la derivada de Solución: Debido a que se trata de la función seno, el teorema a utilizar es el teorema 10
')(cos)( uuusendxd
= . Al igual que se hace para la aplicación de los teoremas de
derivación de funciones algebraicas, el primer paso es identificar los elementos de la fórmula, en este caso, sólo es necesario identificar u. Al analizar la función a derivar, se observa que , luego como la fórmula requiere de u’, la calculamos: . Ahora que tenemos todos los elementos solicitados por la fórmula 10, sólo queda aplicarla, nos queda:
La aplicación de las fórmulas de derivación es un proceso definido que se puede resumir en los siguientes pasos:
Figura 1. Proceso de derivación. Cuando se alcanza un buen nivel de práctica en el cálculo de derivadas, este proceso se realiza de forma casi mecánica y en ocasiones el orden de los pasos puede variar un poco, por ejemplo, a veces primero es conveniente simplificar la expresión algebraicamente y luego derivar.

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
5
En los siguientes ejemplos, se calcula la derivada de distintas funciones trigonométricas (directas e inversas) pero, como versa la frase la práctica hace al maestro, sólo la realización de múltiples ejercicios hará que tu manejo de las derivadas sea cada vez mejor.
Ejemplo 2 Calcula la derivada de
Solución:
Usemos el procedimiento para mostrar su aplicabilidad: Paso 1. Comparamos la función con la lista de fórmulas de derivación (21 hasta el momento).
Paso 2. Debido a que la función es el producto de una constante ( ) con una función trigonométrica ( , usaremos los teoremas 6 y 12.
Teorema 6
Teorema 12
Paso 3, 4 y 5. Primero, para usar el teorema 6 se identifica que c=3 y u=tan (2x) (paso 3), por lo que al sustituir queda
(paso 5) Luego, para aplicar el teorema 12 y poder calcular identificamos u=2x (paso 3) y calculamos u’=2 (paso 4), por lo que
(paso 5)
Finalmente,

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
6
Paso 6. La simplificación en este caso consiste en multiplicar y queda
Que es el resultado final.
En este ejemplo, se observa que la aplicación del procedimiento es válida pero que dependiendo de la función a derivar, el orden de aplicación de los diferentes pasos puede variar o incluso, repetir más de una ocasión la aplicación de alguno de los pasos. En los siguientes ejemplos, se recomienda tener a la mano el formulario con los 21 teoremas vistos hasta el momento.
Ejemplo 3 Calcula la derivada de
Solución:
Los teoremas a utilizar son el 6 y el 10.
Teorema 6
Teorema 10
Debido a que el ejercicio es similar al ejemplo anterior tenemos

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
7
En donde, para el teorema 6 c=3 y u=sen (2x); y para el teorema 10 u=2x y u’=2. Finalmente,
Que es el resultado final.
Ejemplo 4
Calcula la derivada de y = cos x2( )+ tan(x + 2)
Solución: Este ejemplo es una suma de dos funciones trigonométricas, por lo que de acuerdo con el teorema (4), es necesario derivar cada término por separado y después sumar los resultados para obtener la derivada final.
2xu = y xu 2'= usando el teorema (11)
222 2)2)((cos xsenxxxsenxdxd
−=−=
2+= xu y 1'=u usando el teorema (12)
)2(sec)1))(2((sec)2tan( 22 +=+=+ xxxdxd
El resultado final es la suma de ambas derivadas:
)2(sec2' 22 ++−= xsenxxy
Representar funciones trigonométricas elevadas a un exponente se puede realizar de dos formas equivalentes. Ejemplo: Escribir
y = sec22 + x( )
Es igual a escribir
2))2((sec xy += En el curso usaremos las dos formas de manera indistinta.

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
8
Ejemplo 5
Calcula la derivada de y = cot x( ) sec x( )
Solución: Este ejemplo es una multiplicación de dos funciones trigonométricas, por lo que de acuerdo con el teorema (7):
'' vuuvuvdxd
+=
Este teorema implica derivar cada una de las funciones (cot x y sec x) y realizar las multiplicaciones indicadas; sin embargo, cómo ambas funciones tienen el mismo ángulo (x), es posible simplificarlas utilizando las siguientes identidades trigonométricas
xxsenx
costan =
xx
cos1sec =
xsenx 1csc =
xsenxx coscot =
Si rescribimos la función utilizando las identidades trigonométricas tenemos:
⎟⎠
⎞⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=
xxsenxy
cos1cos
dividir cos x por cos x es igual a 1 por lo que:
⎟⎠
⎞⎜⎝
⎛=xsen
y 1 ó xy csc=
Al simplificar la función utilizando identidades trigonométricas, ya no es necesario utilizar el teorema (7), sólo aplicamos el teorema (15) de forma directa:
xu = y 1'=u
)1)(csccot(' xxy −=
xxy csccot' −=
Que es el resultado final.

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
9
Derivación de funciones trigonométricas directas con exponente mayor a 1. Hasta ahora sólo hemos considerado derivadas de funciones trigonométricas con exponente 1, pero, ¿cuál es la forma correcta para derivar funciones como sen3(x) ó csc2(x)? Para ayudarte a comprender mejor la forma de derivar este tipo de funciones, en el siguiente ejemplo se muestra el procedimiento para resolver este tipo de derivadas.
Ejemplo 6
Calcula la derivada de y = sen3 4x2( )
Solución:
Utilizando un paréntesis para hacer evidente el exponente 3 tenemos
y = sen (4x2)⎡⎣ ⎤⎦3
¿Qué fórmula (s) se requiere aplicar?
Debido a que el seno se encuentra elevado al exponente 3 se requiere aplicar el teorema 9
Identificando los elementos
; ;
Para calcular u’ aplicamos el teorema 10
Teorema 10
Y tenemos
Ahora que ya tenemos todos los elementos requeridos por el teorema 10, sustituimos y queda

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
10
Simplificando queda
Que es el resultado final.
En este ejemplo se pone de manifiesto que la solución de derivadas que incluyen funciones trigonométricas requiere de la aplicación de las fórmulas de derivación de funciones algebraicas.
Ejemplo 7
Calcula la derivada de )2(cot3 32 +−= − xy
Solución:
Cambiemos la forma de visualizar el exponente de la función cotangente, queda
¿Qué teoremas utilizaremos para derivar esta función? Debido a que se trata de la multiplicación de una constante por una función, se requiere de la aplicación del teorema 6; también como la función cotangente se encuentra elevada a un exponente distinto de 1 necesitaremos del teorema 9; y el teorema 13 para derivar la función cotangente. Iniciemos,

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
11
Este ejemplo requiere la aplicación de varias fórmulas de derivación que, de no aplicarse de forma ordenada puede conducir a errores. Por ello es importante ir paso a paso, identificando la fórmula a utilizar, realizando pasos intermedios y luego incorporando los resultados parciales para determinar el resultado final. Con la práctica, estas derivadas se llegan a resolver de manera rápida, pero para llegar a ello, se requiere de tiempo y esfuerzo.

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
12
Derivación de funciones trigonométricas inversas. Para calcular la derivada de funciones trigonométricas inversas, nuevamente se requiere identificar los teoremas que deben aplicarse en cada caso y los elementos de cada teorema; luego sustituir todos los elementos en la fórmula y realizar las operaciones algebraicas cuidando de no cometer errores.
Ejemplo 8
Deriva xsenarcy 4= Solución: Al observar la función:
¿Qué teorema crees que es necesario utilizar? Para derivar la función utilizamos el teorema (16)
21')(uuusenarc
dxd
−=
Antes de iniciar a derivar la función trigonométrica identificamos todos los elementos de la fórmula, en este caso: u y u’ y u2, tenemos
xu 4= 4'=u 42 =u
Finalmente sustituimos en la fórmula 16 cada elemento, y queda
21614'x
y−
=
En este ejemplo sólo fue necesario seleccionar el teorema adecuado y aplicarlo.

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
13
Ejemplo 9
Deriva )1(sec −= xarcy Solución: Para derivar la función utilizamos el teorema (20)
1')sec(2 −
=uuuuarc
dxd
Antes de iniciar a derivar la función trigonométrica identificamos u y u’ y u2.
)1( −= xu 1'=u 22 )1( −= xu
Finalmente sustituimos en la fórmula 20 cada elemento y queda
1)1()1(1'
2 −−−=
xxy
Ejemplo de Aplicación. El movimiento armónico simple es un fenómeno físico que se presenta cuando un cuerpo oscila de una posición a otra siguiendo ciclos definidos. Un ejemplo de este movimiento es la forma en que un péndulo se mueve de un extremo a otro, alrededor de una posición central, como se muestra en la siguiente figura:
Figura 2. Péndulo
Si quisiéramos conocer la posición horizontal en que se encuentra el péndulo en cualquier instante de tiempo necesitamos utilizar una función de la forma:
f(t) = a cos (ωt) que relaciona las características más importantes del movimiento:
a = amplitud, que es el movimiento más grande que realiza el péndulo, a partir de su posición central. ω= velocidad angular, que es la rapidez con que se mueve de un punto a otro. t= tiempo.
MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
14
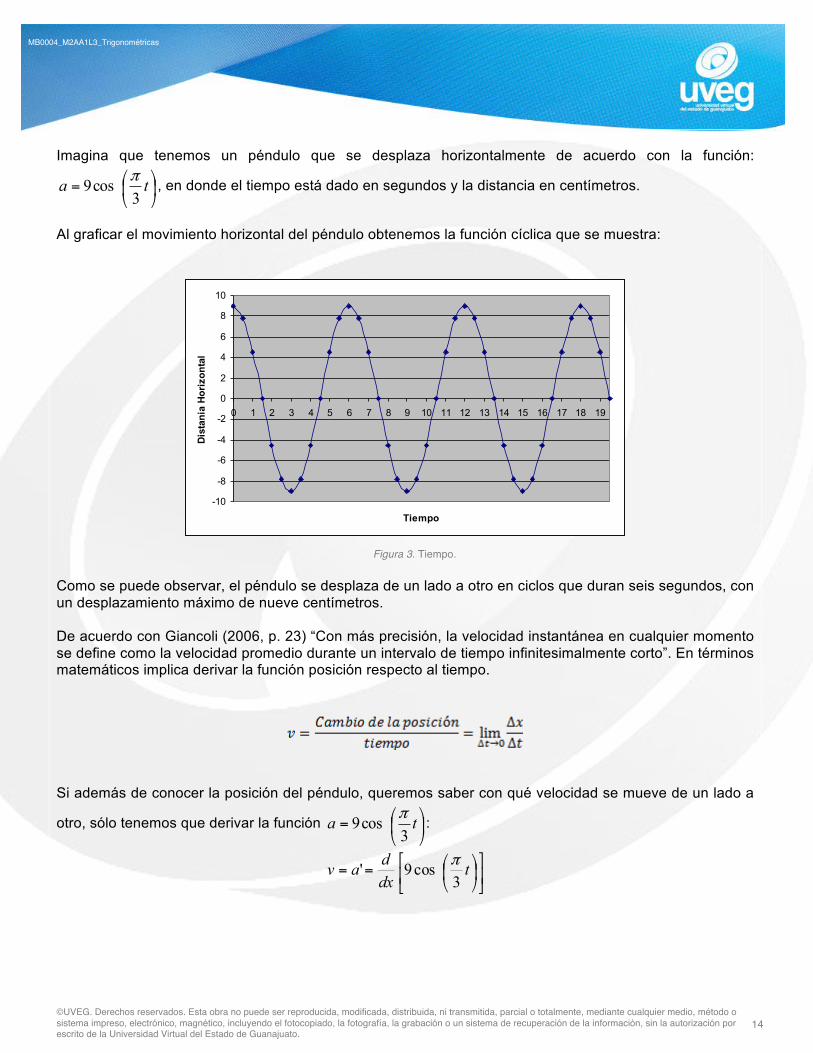
Imagina que tenemos un péndulo que se desplaza horizontalmente de acuerdo con la función:
⎟⎠
⎞⎜⎝
⎛= ta3
cos9 π, en donde el tiempo está dado en segundos y la distancia en centímetros.
Al graficar el movimiento horizontal del péndulo obtenemos la función cíclica que se muestra:
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
Tiempo
Dist
ania
Hor
izon
tal
Figura 3. Tiempo.
Como se puede observar, el péndulo se desplaza de un lado a otro en ciclos que duran seis segundos, con un desplazamiento máximo de nueve centímetros. De acuerdo con Giancoli (2006, p. 23) “Con más precisión, la velocidad instantánea en cualquier momento se define como la velocidad promedio durante un intervalo de tiempo infinitesimalmente corto”. En términos matemáticos implica derivar la función posición respecto al tiempo.
Si además de conocer la posición del péndulo, queremos saber con qué velocidad se mueve de un lado a
otro, sólo tenemos que derivar la función ⎟⎠
⎞⎜⎝
⎛= ta3
cos9 π:
⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛== tdxdav
3cos9' π

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
15
Para derivar esta función, apliquemos el teorema 6 y el teorema 11. Del teorema 6,
y ; por lo que
Luego al aplicar el teorema 11 para derivar la función coseno se obtiene
Al graficar v=a’, es decir, la velocidad con que se desplaza el péndulo, tenemos:
Figura 2. Velocidad.
Observa que:
• Cuando t=0, la posición es igual a 9 (gráfica 1) y la velocidad igual a 0 (gráfica 2).
• Cuando t=1.5, la posición es igual a 0 (gráfica 1) y la velocidad igual a 3 (gráfica 2).
• Cuando t=3, la posición es igual a -9 (gráfica 1) y la velocidad igual a 0 (gráfica 2).
Esto quiere decir que cuando el péndulo se encuentra en alguno de sus extremos, la velocidad siempre es igual a cero (el péndulo se detiene) y cuando se encuentra en el centro (desplazamiento cero) su velocidad es máxima (3 ).

MB0004_M2AA1L3_Trigonométricas
©UVEG. Derechos reservados. Esta obra no puede ser reproducida, modificada, distribuida, ni transmitida, parcial o totalmente, mediante cualquier medio, método o sistema impreso, electrónico, magnético, incluyendo el fotocopiado, la fotografía, la grabación o un sistema de recuperación de la información, sin la autorización por escrito de la Universidad Virtual del Estado de Guanajuato.
16
Referencias
Arya, J. y Lardner, R. (2002). Matemáticas aplicadas a la Administración y a la Economía. México: Pearson Educación. Cruz Castillo, L.; Prado Pérez, C.; Vallejo Aguirre, F. (2006). Cálculo diferencial para ingeniería [libro en línea]. México: Pearson Educación. Disponible en http://www.bibliotechnia.com/bibliotechnia20/index.php?option=com_libros&task=preview&id=2541&Itemid=5. Recurso disponible en Biblioteca Digital UVEG. Edwards, C. (1997). Cálculo diferencial e integral [libro en línea]. México: Prentice Hall. Disponible en http://www.bibliotechnia.com/bibliotechnia20/index.php?option=com_libros&task=preview&id=530&Itemid=5. Recurso disponible en Biblioteca Digital UVEG. Edwards, C. (1996). Cálculo con geometría analítica [libro en línea]. México: Prentice Hall. Disponible en http://www.bibliotechnia.com/bibliotechnia20/index.php?option=com_libros&task=preview&id=1432&Itemid=5. Recurso disponible en Biblioteca Digital UVEG. Fuenlabrada, I. (2001). Cálculo Diferencial. México: McGraw-Hill Interamericana. Giancoli, C. (2006). Física, principios con aplicaciones [libro en línea]. México: Pearson Educación. Recuperado el 2 de agosto de 2010 de http://books.google.com.mx/books?id=uUAogT2C6FwC&pg=PT158&dq=giancoli&hl=es&ei=CqNhTKfCHouosQOT7pCrCA&sa=X&oi=book_result&ct=book-preview-link&resnum=6&ved=0CEcQuwUwBQ#v=onepage&q=velocidad&f=false Purcell, E. (2001). Cálculo [libro en línea]. México: Pearson Educación. Disponible en http://www.bibliotechnia.com/bibliotechnia20/index.php?option=com_libros&task=preview&id=1280&Itemid=5. Recurso disponible en la Biblioteca Digital UVEG. Smith, R. y Minton, R. (2000). Cálculo. Colombia: McGraw-Hill. Figuras 1-3 De “Cálculo diferencial”, por O. Ramírez, 2010, Profesor Experto en Contenido, Universidad Virtual del Estado de Guanajuato.