contenido de la parte ii - frro.utn.edu.ar · propiedades de la transformada de laplace ......
TRANSCRIPT

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 1 de 74
Contenido de la parte II Versiones ........................................................................................................... 2
11. La Transformada de Laplace........................................................................ 3
11.1 Introducción ...................................................................................................... 3
11.2 Definición de Transformada de Laplace ............................................................ 4
11.3 Principales propiedades.................................................................................... 4
12 Circuitos equivalentes de Laplace................................................................. 8
12.1 Circuitos equivalentes de cada elemento .......................................................... 8
12.2 Aplicación de los circuitos equivalentes .......................................................... 10
13 Transformación inversa de Laplace ............................................................ 17
13.1 Fracciones simples ......................................................................................... 17
13.2 Métodos generales.......................................................................................... 19
13.3 Métodos particulares....................................................................................... 20
13.4 Métodos combinados ...................................................................................... 25
14 Funciones de red......................................................................................... 30
14.1 Inmitancias...................................................................................................... 30
14.2 Transferencias ................................................................................................ 31
14.3 Restricciones .................................................................................................. 32
14.4 Características matemáticas ........................................................................... 34
14.5 Respuesta según los polos de la transferencia ............................................... 39
14.6 Teoremas del valor inicial y final ..................................................................... 42
15 Excitación con funciones compuestas......................................................... 45
15.1 Resolución por superposición ......................................................................... 45
15.2 Resolución por intervalos ................................................................................ 46
15.3 Método de Transformada completa de la excitación ................................ 48
16 Excitación con funciones compuestas periódicas ....................................... 61
16.1 Consideraciones generales............................................................................. 61
16.2 Obtención de la respuesta .............................................................................. 62
ANEXO B – Transformadas de Laplace........................................................... 69
Tabla1. Transformadas de Laplace más usuales.................................................... 69
Tabla 2. Propiedades de la transformada de Laplace ............................................. 71
Tabla 3. Transformadas de funciones periódicas.................................................... 72

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 2 de 74
Versiones
Nº Fecha Modificaciones 1.0 31/08/2005 Versión inicial 1.1 30/11/2005 Corrección errores numéricos. Pág. 14 y 32 1.2 10/06/2006 Corrección errores numéricos. Pág. 45, 47, 55 y 56 1.3 27-03-2010 Correcciones aportadas por Nicolás Di Ruscio

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 3 de 74
PARTE II MÉTODO OPERACIONAL O DE LAPLACE
11. La Transformada de Laplace
11.1 Introducción Una Transformada es un conjunto de operaciones que se pueden aplicar sobre determinadas funciones de una variable x , resultando para cada una de ellas una función de otra variable y . Por ejemplo la transformada de una función
)(1 xf será una función )(1 yF , la de )(2 xf será )(2 yF , etc. Este proceso se llama
transformación, en consideración a que una función de una variable se transforma en una función de otra variable.
Además, para cada Transformada existe una función llamada Transformada Inversa, que aplicada sobre cada función de variable y permite obtener la función de variable x de la cual provino al realizar la transformación. Este proceso se llama anti-transformación.
La relación entre las funciones de variable x y las de variable y es biunívoca.
Lo expuesto se muestra en la figura, donde )(T es la
Transformada y )(1−T es la
Transformada Inversa o Anti-transformada.
El sentido que tiene la transformación de funciones de una determinada variable x , es obtener funciones de otra variable y que tengan propiedades que faciliten la resolución de cierto problema matemático. Una vez resuelto el problema en el campo de la variable y habrá que anti-transformar el resultado para obtener el correspondiente al campo de x , que es la verdadera variable del problema.
La Transformada de Laplace tiene una propiedad de gran valor para resolver los problemas de régimen transitorio: transforma las ecuaciones diferenciales en ecuaciones algebraicas.
( ))(1 xfT
( ))(11
yFT − )(1 yF
)(2 yF
)(1 xf
)(2 xf( ))(2 xfT
( ))(21
yFT −
FIG. 11.1 TRANSFORMACIÓN DE FUNCIONES

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 4 de 74
11.2 Definición de Transformada de Laplace
Simbología
Aplicaremos la Transformada de Laplace a funciones del tiempo, obteniendo funciones de la llamada variable de Laplace, que simbolizaremos con s .
)(sF es la Transformada de Laplace de )(tf )()(t
fsF L= [11.1]
y )(tf es la Anti-transformada de )(sF )(1
)( sF
-
tf L= [11.2]
En general, escribiremos en minúscula cursiva las funciones del tiempo, y usaremos la misma letra en mayúscula de imprenta, para las correspondientes funciones transformadas. Por ejemplo escribiremos )(ti para representar la
corriente e )(sI para su transformada, o simplemente i e I .
Definición
Una función )(tf puede ser transformada si cumple las siguientes condiciones:
00)( <∀= tf t [11.3]
finitossyMconteMfts
t 0)( 00 ≥∀⋅< ⋅ [11.4]
y su transformada es:
dtefFts
tt
fs ∫∞
⋅−⋅==0
)()(
)( L [11.5]
Como la Trasformada de Laplace es una integral definida con respecto al tiempo, la variable tiempo desaparece, mientras que s, que es una constante para la integral, queda como variable del resultado.
La condición [11.4] significa que la función a transformar no puede superar (en valor absoluto) a la función ts
eM⋅⋅ 0 , con las constantes M y
0s tan grandes como sea
necesario aunque finitas. Siendo así, una función como 2t
e no es transformable.
11.3 Principales propiedades Aquí se presentan las propiedades que realmente hacen de la Transformada de Laplace una herramienta invalorable para resolver regimenes transitorios.
Las demás propiedades se presentarán a medida que sean necesarias para afrontar los problemas que se planteen.
Linealidad
El hecho de que la Transformada de Laplace sea una integral le otorga la propiedad de linealidad.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 5 de 74
Si )(2)(1)( ttt qkpkf ⋅+⋅= siendo 1k y 2k constantes
La Transformada de Laplace de )(tf es:
)(2)(1)( sss QkPkF ⋅+⋅= [11.6]
siendo )(sP la transformada de )(tp y )(sQ la de )(tq
Transformada de una constante
Normalmente las transformadas de Laplace se obtienen de tablas en lugar de aplicar la fórmula de transformación. Sin embargo, antes de proseguir con las principales propiedades, consideramos oportuno mostrar cómo se determina al menos una transformada a partir de esa fórmula, y para ello, nada mejor que elegir la función constante, que es la más utilizada en los problemas eléctricos.
Cabe aclarar que cuando hablamos de la Transformada de Laplace de una función )(tf , en realidad nos referimos a la transformada de )0()( −⋅ tt Hf , ya que
una función, para ser Laplace-transformable, debe ser nula para todo 0<t . En general se conviene simplificar la notación omitiendo la escritura de )0( −tH .
En consecuencia, cuando hablamos de la transformada de la constante k nos estamos refiriendo a la de )0( −⋅ tHk .
Aplicando la definición:
s
k
sk
s
ekdtekF
tsts
s =−
−=−
=⋅=
∞⋅−∞
⋅−
∫1
0
00
)( [11.7]
La transformada es la constante dividida por la variable de Laplace.
Transformada de la derivada de una función
Transformemos la función dt
dgf
t
t
)(
)( = aplicando lo definido en [11.5].
( )
)(
0
)(
)(
)0(
t
g
g
tstst
s dgedtedt
dgF ∫∫
∞
⋅−∞
⋅− ==
Resolvemos por partes, (recordemos que ∫ ∫−= vduuvudv ), haciendo tseu ⋅−=
y )(tdgdv = ; entonces:
∫ ∫∞ ∞
⋅−⋅−∞⋅− −⋅=⋅+−=−−⋅=0
)0()(
0
)()0()(0
)()( )( gGsdtegsgdtesgegF s
ts
t
ts
t
ts
ts [11.8]
La transformada de la derivada de una función es la transformada de la función multiplicada por la variable s , menos el valor inicial de la función.
Al cambiar la variable de integración, los nuevos extremos son los valores que corresponden a la nueva variable para cada uno de los extremos anteriores.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 6 de 74
Transformada de la integral de una función
Transformemos ∫ ⋅=t
tt dtgf0
)()(
dtedtgF ts
t
ts ∫ ∫∞
⋅−
=0 0
)()(
También resolvemos por partes haciendo dtedvyfdtgu ts
tt
⋅−=≡= ∫ )()( ;
entonces: dtgduyes
v t
ts
)(
1=−= ⋅−
43421)(
)(
0
)0(
)(
00
)()(
10
11
sG
t
ts
t
ts
t
ts
s dtgess
fdtge
sfe
sF ∫∫
∞
⋅−
∞
⋅−
∞
⋅− +
+=−−−=
Como s
GFdtgf
s
st
)(
)(
0
0
)()0( 0 =⇒=⋅= ∫ [11.9]
La transformada de la integral de una función es la transformada de la función dividida por la variable de Laplace.
Aplicación a la resolución de ecuaciones diferenciales
Tomemos un sistema de ecuaciones diferenciales como las del circuito de dos mallas del punto 10 de la Parte I
++−=
−+=
dt
diLiR
dt
diL
dt
diL
dt
diLiRve
222
1
2111
0
Si bien no hay integrales sino sólo derivadas, sirve como ejemplo para mostrar cómo las ecuaciones diferenciales se convierten en ecuaciones algebraicas. Aplicamos entonces la propiedad de linealidad y la concerniente a la derivada de una función.
( ) ( )( ) ( )
−++−−=
−−−+=
)0(2222)0(11
)0(22)0(1111
0 isILIRisIL
isILisILIRVe
Vemos que efectivamente obtenemos un sistema de ecuaciones algebraicas.
Ponemos los términos independientes en el primer miembro:
( )
( )
++⋅−=⋅+⋅−
⋅−+=⋅−⋅+
LsRILsIiLiL
LsILsRIiLiLVe
221)0(2)0(1
211)0(2)0(1
De aquí es sencillo obtener 1I e 2I ,
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 7 de 74
[ ])(
)()(
)())((
)()()()(
)(
2121
)0(2)0(122
2
21
)0(2)0(1
2
2)0(2)0(1
2
1
2)0(2)0(1
)0(2)0(1
1RRLsRR
iiLRLsRV
LsLsRLsR
iisLLsRiiLV
LsRLs
LsLsR
LsRiiL
LsiiLV
Iee
e
++
−++=
−++
−−+−+=
+−
−+
+−−
−−+
=
[ ])(
)(
)(
)()()()(
)(
2121
)0(2)0(11
2121
)0(2)0(1)0(2)0(11
2
1
)0(2)0(1
)0(2)0(11
2RRLsRR
iiLRLsV
RRLsRR
LsiiLViiLLsR
LsRLs
LsLsR
iiLLs
iiLVLsR
Iee
e
++
−−=
++
−++−+−=
+−
−+
−−−
−++
=
pero esas funciones de las variable s no tienen sentido eléctrico. Habrá que anti-transformarlas para hallar )(1 ti e )(2 ti , que son las verdaderas corrientes en
el mundo real.
A menudo la parte más complicada de un problema es obtener la anti-transformada. Más adelante repasaremos los métodos más útiles para ello.
Teoremas del desplazamiento
Los denominados Teoremas del desplazamiento son dos; uno considera el desplazamiento de la variable t y otro el de la variable s.
Dada una función del tiempo )(tf y su correspondiente Transformada de
Laplace )(sF , estos Teoremas establecen las relaciones que se muestran en la
siguiente tabla.
Funciones sin desplazar
)0()( −Η⋅ ttf )(sF
Desplazamiento de la variable t
)()( atatf −− Η⋅ sa
s eF ⋅−⋅)( [11.10]
Desplazamiento de la variable s
ta
t ef ⋅−⋅)( )( asF + [11.11]
Recordemos que las funciones transformables son nulas para 0<t . Por lo tanto, aunque convengamos representar una función rampa como tmf t =)( , debemos
tener presente que en realidad nos referimos a )0()( −= tt Htmf ( es la función de la
izquierda en la figura)
La función de la derecha es la misma que se ha desplazado hasta at = , y su expresión es:
( ) )()()( atatat HatmHf −−− −=
En ese caso es imprescindible indicar el escalón.
De acuerdo con el Teorema del desplazamiento de la variable t sus transformadas son:
a 0
FIG.11.2 DESPLAZAMIENTO DE FUNCIONES

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 8 de 74
2s
m y sae
s
m ⋅−
2 respectivamente.
El otro Teorema lo aplicamos cuando tenemos una función de la variable de Laplace
como ( )2as
m
+ que es la función
2s
m corrida en a.
En tal caso, la antitransformada es: taetm ⋅−
12 Circuitos equivalentes de Laplace
12.1 Circuitos equivalentes de cada elemento
Elementos pasivos
En el punto 2 (Parte I), establecimos las relaciones tensión-corriente para los tres elementos pasivos básicos que conforman los circuitos eléctricos.
A continuación transformamos esas relaciones.
Para el Resistor, RivR ⋅= se transforma en RIVR ⋅= . [12.1]
Para el inductor, dt
diLvL = se transforma en )0()0( )( LiLsIiIsLVL −⋅=−= [12.2]
Para el capacitor, ∫∞−
⋅=t
C dtiC
v1
, no se puede transformar directamente.
Ello se debe a que la función a transformar debe ser nula en el intervalo ( )0,∞− , condición que no asegura la ecuación anterior. Si dividimos el intervalo de integración a ambos lados de 0=t :
∫∫∫ ⋅+=⋅+⋅=∞−
t
C
t
C dtiC
vdtiC
dtiC
v0
)0(
0
0111
La primera integral es el valor de tensión en 0=t , es decir una constante cuya transformada es muy simple, y la segunda, una función que nace en 0=t , por lo que ahora sí la podemos transformar aplicando [11.9].
Resulta: Cs
I
s
vV
C
C += )0( [12.3]
Para cada elemento, R, L y C, podemos encontrar un circuito que recorrido por una corriente )(sI tenga entre sus extremos una caída de tensión RV , LV o CV ,
de acuerdo con las ecuaciones [12.1] a [12.3], como se muestra a continuación.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 9 de 74
Resistor RIVR ⋅=
Inductor
)0(LiLsIVL −⋅=
El primer circuito es el que se desprende de la ecuación; el segundo se obtuvo convirtiendo la fuente de tensión en una de corriente.
Capacitor s
v
Cs
IV
C
C
)0(+=
FIG.12.1 CIRCUITOS EQUIVALENTES DE LAPLACE
Obsérvese que en las tres ecuaciones I está multiplicada por un factor que podemos considerar una impedancia en transformada de Laplace. Tales son:
R Resistencia [12.4]
CsXC
1=
Reactancia Capacitiva [12.5]
LsX L = Reactancia Inductiva [12.6]
Además en las ecuaciones del inductor y del capacitor hay sendos términos que son independientes de la variable, por lo cual revisten el carácter de fuentes de tensión.
)0(iL ⋅− s
vC )0(
Como los segundos miembros de las ecuaciones son caídas de tensión, el término negativo, que corresponde al inductor, es una fuente que inyecta corriente en el
−+ RV
IR
I + s
vC )0(
−+ CV
Cs1
−+ LV
+ I)0(iL ⋅
Ls
−+ LV
Is
i )0(
Ls

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 10 de 74
sentido de la corriente de referencia, en tanto que el término positivo (correspondiente al capacitor), es una fuente opuesta a dicha corriente, con una polaridad igual a la tensión inicial en el capacitor.
Para el inductor presentamos una variante, transformando la fuente de tensión en serie por una fuente de corriente en paralelo, lo que muestra cierta analogía entre este circuito equivalente y el del capacitor. En ambos tenemos la reactancia de Laplace y una fuente relacionada con la condición inicial característica de cada elemento (corriente para el inductor y tensión para el capacitor)
Sin que ello pretenda ser una interpretación física, puesto que hemos dicho que en el campo de la variable de Laplace nos sustraemos del mundo real, las fuentes que aparecen en estos circuitos equivalentes representan la propiedad del inductor de favorecer el mantenimiento de la corriente y la del capacitor de mantener la tensión.
En el caso en que las condiciones iniciales sean nulas, los circuitos equivalentes anteriores consisten sólo de las impedancias de Laplace.
Elementos activos
Cada fuente que forma parte de un circuito, genera un término en las ecuaciones que es función del tiempo.
Al transformar ese término, si la fuente es independiente, el circuito equivalente de Laplace es la transformada de la función que representa la fuente.
Si es dependiente, su circuito equivalente es la transformada de la variable de la que depende multiplicada por la constante que la relaciona con esa variable.
12.2 Aplicación de los circuitos equivalentes
Circuito equivalente de un circuito con varios componentes
Hemos obtenido los circuitos equivalentes de cada elemento básico considerado en forma aislada. (En realidad el elemento no está aislado, sino que forma parte de una red no explicitada que provoca la corriente que se indica a través del mismo)
Interesa ahora determinar el circuito equivalente para un circuito formado por la combinación de varios elementos básicos. Veremos que para ello basta con reemplazar cada elemento básico que lo forma, por su respectivo circuito equivalente.
+ +
) ( sI
FIG.12.3 FUENTE DEPENDIENTE (EJEMPLO)
)()( sxs IkV ⋅=
) ( ti
)()( txt ikv ⋅=
+
tsenVv t ω⋅=)(
)(ti
+
22)(ω
ω
+=
sVV s
)(sI
FIG.12.2 FUENTE INDEPENDIENTE (EJEMPLO)
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 11 de 74
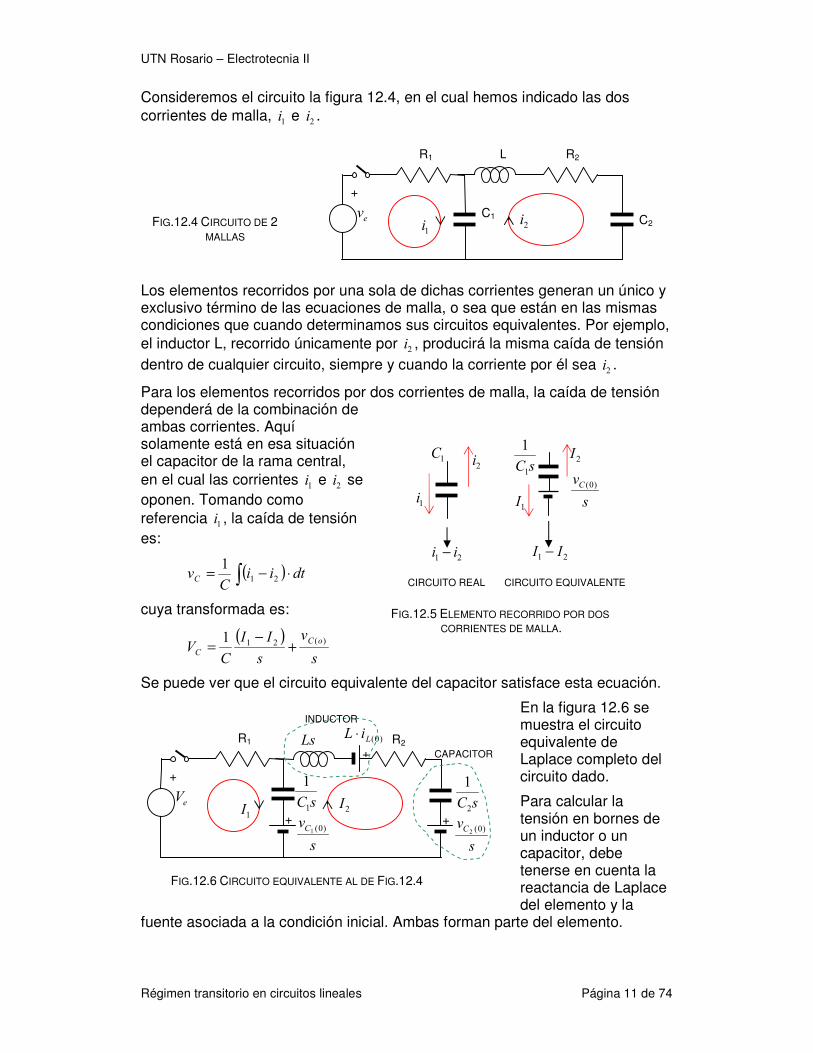
Consideremos el circuito la figura 12.4, en el cual hemos indicado las dos corrientes de malla, 1i e 2i .
Los elementos recorridos por una sola de dichas corrientes generan un único y exclusivo término de las ecuaciones de malla, o sea que están en las mismas condiciones que cuando determinamos sus circuitos equivalentes. Por ejemplo, el inductor L, recorrido únicamente por 2i , producirá la misma caída de tensión dentro de cualquier circuito, siempre y cuando la corriente por él sea 2i .
Para los elementos recorridos por dos corrientes de malla, la caída de tensión dependerá de la combinación de ambas corrientes. Aquí solamente está en esa situación el capacitor de la rama central, en el cual las corrientes 1i e 2i se oponen. Tomando como referencia 1i , la caída de tensión es:
( )∫ ⋅−= dtiiC
vC 21
1
cuya transformada es:
( )s
v
s
II
CV
oC
C
)(211+
−=
Se puede ver que el circuito equivalente del capacitor satisface esta ecuación.
En la figura 12.6 se muestra el circuito equivalente de Laplace completo del circuito dado.
Para calcular la tensión en bornes de un inductor o un capacitor, debe tenerse en cuenta la reactancia de Laplace del elemento y la
fuente asociada a la condición inicial. Ambas forman parte del elemento.
R1 Ls
+
sC1
1
R2
1I 2I eV
+ +
+
sC2
1
)0(LiL ⋅
s
vC )0(1 s
vC )0(2
INDUCTOR
CAPACITOR
FIG.12.6 CIRCUITO EQUIVALENTE AL DE FIG.12.4
R1 L
C2
+
C1
R2
1i
2i ev
FIG.12.5 ELEMENTO RECORRIDO POR DOS CORRIENTES DE MALLA.
1i
1C 2i
21 II − 21 ii −
s
vC )0(
sC1
1
1I
2I
CIRCUITO EQUIVALENTE CIRCUITO REAL
FIG.12.4 CIRCUITO DE 2 MALLAS

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 12 de 74
Aplicación práctica
Cada vez que se debe resolver un circuito por el método de la transformada de Laplace, no es necesario plantear sus ecuaciones diferenciales para luego transformarlas. Resulta más conveniente reemplazar cada elemento por su circuito equivalente de Laplace y obtener directamente a partir de allí las ecuaciones en la variable s.
Del circuito equivalente anterior, se obtienen la siguientes ecuaciones de malla en la variable s.
++++−=+−
−
+=−
sCsCRLsI
sCILi
s
v
s
v
sCI
sCRI
s
vV
L
CC
C
e
12
22
1
1)0(
)0()0(
1
2
1
11
)0(
111
11
21
1
.
Este es un sistema de dos ecuaciones algebraicas con dos incógnitas, 1I e 2I . Una vez despejadas es preciso antitransformarlas para obtener 1i e 2i que son las únicas corrientes de existencia real.
Si deseamos obtener las tensiones, hay dos alternativas.
o Obtener las tensiones transformadas y luego antitransformarlas. Por ejemplo, en transformada, la tensión del inductor en función de la corriente sería:
)0(2 LL LiLsIV −⋅=
o Obtenida la corriente en el tiempo, aplicar la correspondiente relación tensión-corriente. Para el inductor, simplemente:
dt
diLvL
2=
La conveniencia de una u otra alternativa dependerá de cada caso en particular. Aquí la segunda parece ser la más sencilla, pero si se tratase de la tensión en un capacitor, no sería así, ya que habría que integrar, siendo necesario determinar la constante de integración en base a las condiciones iniciales
Cálculo de potencias
Hay que tener cuidado con el cálculo de potencias debido a que la transformada de Laplace no es distributiva con respecto al producto.
Si calculamos la tensión y la corriente transformadas de un elemento de circuito, por ejemplo V e I , y hacemos el producto IVP ⋅= , la antitransformada de P no es la potencia en ese elemento.
Hay que antitransformar V e I , para hallar la tensión y la corriente en el tiempo, y luego sí, hallar la potencia como )()()( . ttt ivp =
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 13 de 74
Teoremas aplicables
El método de mallas, en el que hemos basado los razonamientos precedentes, se funda en el principio de superposición, válido cuando los componentes de los circuitos son lineales. Su utilización se puede extender al campo de la Transformada de Laplace porque ésta posee la propiedad de linealidad. De igual manera, podemos establecer la aplicabilidad del método de nudos y los teoremas de Thèvenin, Norton, Millman, etc.
Ejemplo
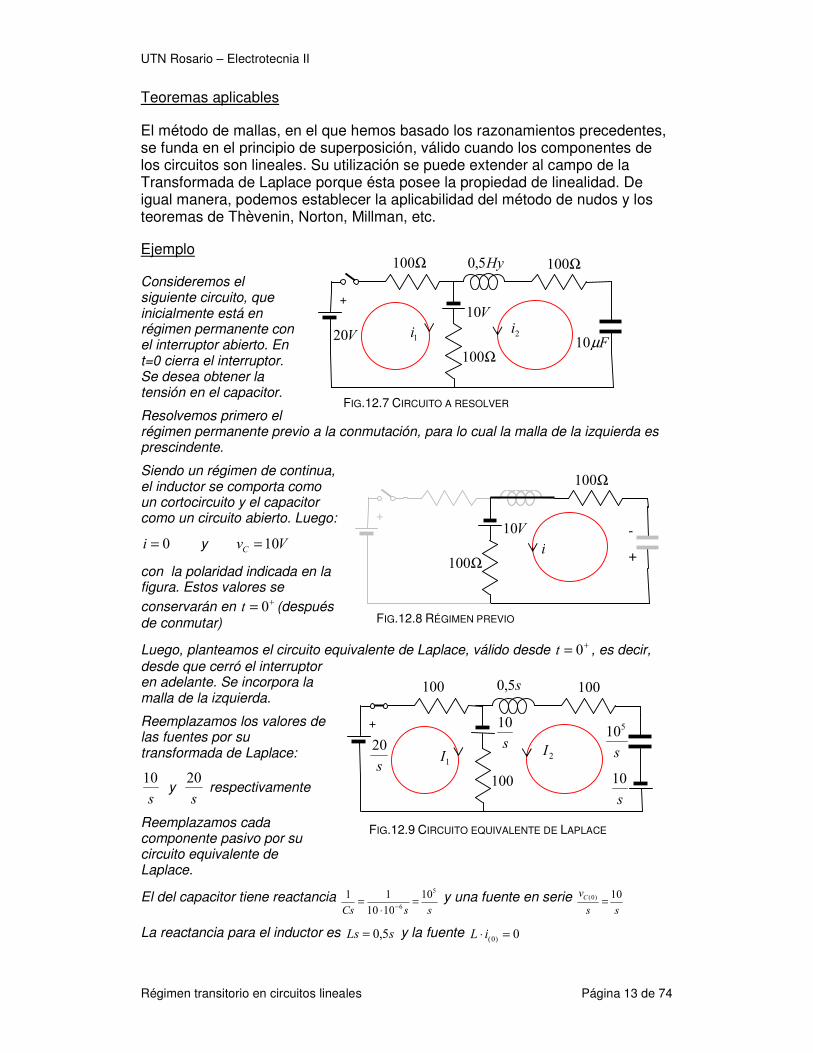
Consideremos el siguiente circuito, que inicialmente está en régimen permanente con el interruptor abierto. En t=0 cierra el interruptor. Se desea obtener la tensión en el capacitor.
Resolvemos primero el régimen permanente previo a la conmutación, para lo cual la malla de la izquierda es prescindente.
Siendo un régimen de continua, el inductor se comporta como un cortocircuito y el capacitor como un circuito abierto. Luego:
0=i y VvC 10=
con la polaridad indicada en la figura. Estos valores se conservarán en += 0t (después de conmutar)
Luego, planteamos el circuito equivalente de Laplace, válido desde += 0t , es decir, desde que cerró el interruptor en adelante. Se incorpora la malla de la izquierda.
Reemplazamos los valores de las fuentes por su transformada de Laplace:
s
10 y
s
20 respectivamente
Reemplazamos cada componente pasivo por su circuito equivalente de Laplace.
El del capacitor tiene reactancia ssCs
5
6
10
1010
11=
⋅=
− y una fuente en serie
ss
vC 10)0( =
La reactancia para el inductor es sLs 5,0= y la fuente 0)0( =⋅ iL
Ω100 Hy5,0 Ω100
Fµ10
+ V10
1i
2i
Ω100
V20
FIG.12.7 CIRCUITO A RESOLVER
+ V10
Ω100
Ω100
i
-
+
FIG.12.8 RÉGIMEN PREVIO
s5,0 100
s
510
+
s
10
1I 2I
100
100s
20
s
10
FIG.12.9 CIRCUITO EQUIVALENTE DE LAPLACE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 14 de 74
La fuente en serie con el capacitor tiene la polaridad de la tensión inicial. Cuando la corriente inicial no es nula, la fuente de tensión en serie con el inductor debe tener una polaridad como para inyectar corriente en el mismo sentido de la corriente inicial.
Por mallas:
( )
++++⋅=−
⋅++=+
1005,010010
1001010
1001001001020
5
21
21
ss
IIss
IIss
Notar que por los sentidos elegidos las corrientes de malla se suman en la rama común. En esas ecuaciones se explicitaron todos los términos para que sea más sencillo ver de dónde surgen. Ahora las simplificamos.
+⋅++⋅=
⋅+⋅=
s
ssII
IIs
52
21
21
102005,01000
10020030
Para hallar la tensión en el capacitor primero obtenemos la corriente:
524
52
52
2102300
30
10102005,0
200
30100
102005,0100
100200
0100
30200
⋅++
−=
−++
⋅
⋅−=
++
=ss
s
ss
s
s
ss
s
I
Luego, la caída de tensión en el capacitor, tomando como referencia el polo positivo hacia arriba, es:
ssssssIVC
1010
102300
301010 5
52
5
2 −⋅⋅++
−−=−⋅−=
Por Thèvenin:
Separamos la rama que contiene el capacitor.
La tensión de Thèvenin es:
ss
s
sIVTH
510100
200
30
10100
=−⋅
=−⋅=
Y la impedancia de Thèvenin, pasivando las fuentes (como son de tensión se reemplazan por cortocircuitos):
s
sZTH
5,0150
100100
1001005,0100
+=
=+
⋅++=
Una vez obtenidas la tensión y la impedancia de
Thèvenin, el circuito queda reducido a un circuito de una sola malla.
s5,0 100
+
s
10
I
100
100 s
20
+
VTH
-
100 s5,0 100
100
FIG.12.10 CÁLCULO DE LA TENSIÓN Y DE LA IMPEDANCIA DE THÈVENIN

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 15 de 74
ssssss
ss
ss
ss
sZ
sV
V
TH
TH
C
1010
102300
301010
105,0150
105
1010
10
10
5
52
5
5
5
5
−⋅++
=−
++
+=
=−⋅
+
+=
Aplicación de Millman.
No debe descartarse la aplicación de otros teoremas cuando permiten simplificar el circuito. El Teorema de Millman permite reemplazar ramas constituidas por fuentes de tensión en serie con una impedancia por una sola rama de ese tipo. En la figura se muestra para dos ramas.
En nuestro problema, lo podemos aplicar a las dos ramas de la izquierda, resultando la fuente y la impedancia encerradas por línea de trazos en la Fig. 12.13.
El circuito se reduce a una sola malla con lo cual, el cálculo de 2I es muy sencillo.
5252102300
30
101505,0
15
⋅++=
++
=ss
ss
sI
Luego: ssss
VC1010
102300
30 5
52−
⋅++=
En este caso, el Teorema de Millman nos permitió llegar rápidamente a un circuito de una sola malla, cuya resolución es muy simple. Pero ello es sólo una cuestión válida para este ejemplo. El método de mallas y el de Thèvenin (o sus compañeros: nudos y Norton), siempre nos permiten llegar al resultado, sin embargo, antes de aplicarlos es conveniente observar el circuito para ver si no podemos realizar una simplificación por medio de otro de los Teoremas de los circuitos, como en este caso el de Millman.
Una vez obtenida la variable de interés en Transformada de Laplace es necesario realizar la Transformación inversa para obtener la variable en el tiempo. A menudo, resulta más sencilla la primer parte (obtener la variable Transformada), que llevar a cabo la antitransformación.
Más adelante se muestra cómo obtener la antitransformada, que para este ejemplo resulta:
( )tsentev t
tc ⋅⋅+⋅⋅−= ⋅− 42134,5421cos155 150
)(
Ejemplo
1Z 2Z
21
21
ZZ
ZZZ
+
⋅=
21
1221
ZZ
ZVZVV
+
+=
2V + + +
1V
FIG.12.12 EQUIVALENTE DE MILLMAN
s
510
+
s
5
2I
50 s
10
s5,0 100
FIG.12.13 APLICACIÓN DE MILLMAN
+
THV
THZ s
510
s
10
FIG.12.11 CIRCUITO DE THÈVENIN
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 16 de 74
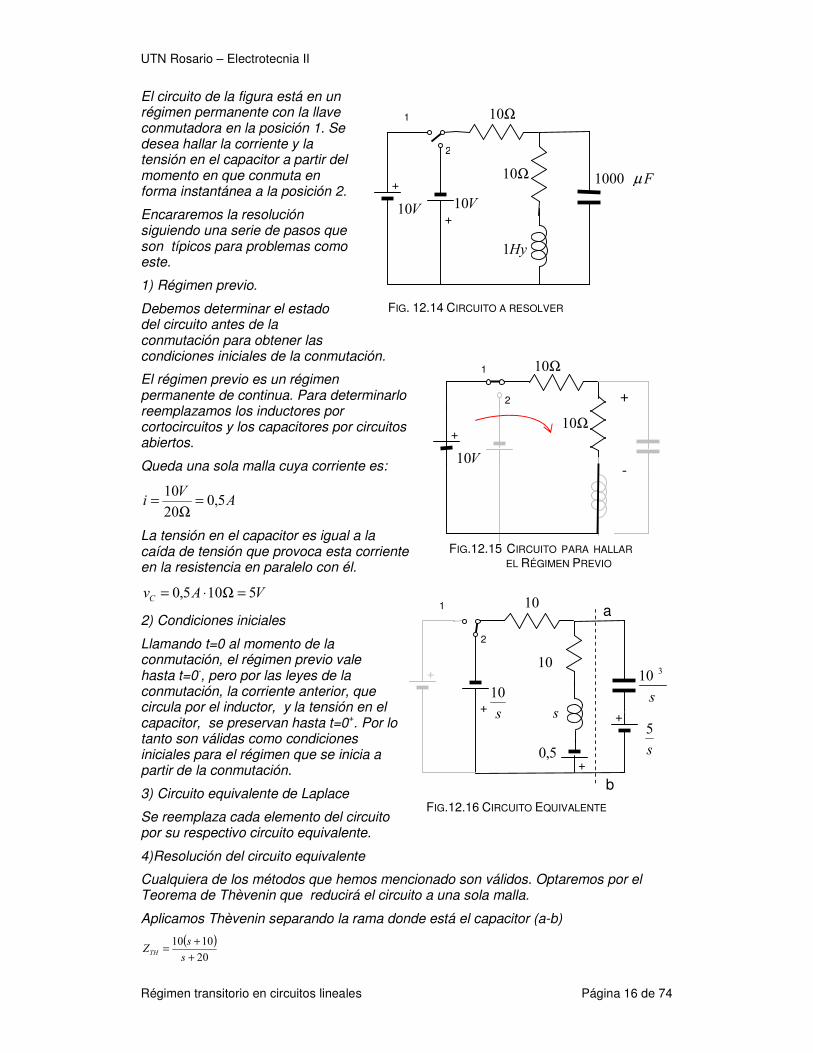
El circuito de la figura está en un régimen permanente con la llave conmutadora en la posición 1. Se desea hallar la corriente y la tensión en el capacitor a partir del momento en que conmuta en forma instantánea a la posición 2.
Encararemos la resolución siguiendo una serie de pasos que son típicos para problemas como este.
1) Régimen previo.
Debemos determinar el estado del circuito antes de la conmutación para obtener las condiciones iniciales de la conmutación.
El régimen previo es un régimen permanente de continua. Para determinarlo reemplazamos los inductores por cortocircuitos y los capacitores por circuitos abiertos.
Queda una sola malla cuya corriente es:
AV
i 5,020
10=
Ω=
La tensión en el capacitor es igual a la caída de tensión que provoca esta corriente en la resistencia en paralelo con él.
VAvC 5105,0 =Ω⋅=
2) Condiciones iniciales
Llamando t=0 al momento de la conmutación, el régimen previo vale hasta t=0-, pero por las leyes de la conmutación, la corriente anterior, que circula por el inductor, y la tensión en el capacitor, se preservan hasta t=0+. Por lo tanto son válidas como condiciones iniciales para el régimen que se inicia a partir de la conmutación.
3) Circuito equivalente de Laplace
Se reemplaza cada elemento del circuito por su respectivo circuito equivalente.
4)Resolución del circuito equivalente
Cualquiera de los métodos que hemos mencionado son válidos. Optaremos por el Teorema de Thèvenin que reducirá el circuito a una sola malla.
Aplicamos Thèvenin separando la rama donde está el capacitor (a-b)
( )20
1010
+
+=
s
sZTH
+
+
V10
1
2
Ω10
V10
Ω10
Hy1
Fµ1000
FIG. 12.14 CIRCUITO A RESOLVER
Ω10
+
1
2
V10
Ω10
+
-
FIG.12.15 CIRCUITO PARA HALLAR EL RÉGIMEN PREVIO
+
+
s
10
1
2
10
10
s s
310
+
+ 5,0 s
5
a
b
FIG.12.16 CIRCUITO EQUIVALENTE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 17 de 74
( ) ( )( ) ( )( ) ( ) ( )20
10015
20
105,01001055,0
20
205,010105,05,010
20
105,0 22
+
+−=
+
−−−−+=
+
+−+−=−+
+
−=
ss
s
ss
sssss
ss
sssss
s
sV
I
TH
43421
En el circuito de Thèvenin la corriente de malla es la del capacitor:
( )( )
( )2000110
102
20000110010
20020
1021010010
100510015
10
20
1010
5
20
10015
10
5
22
43233
++
+−=
++
+−=
=⋅+++
+++−=
++
+
−+
+−
=
+
−=
ss
s
ss
s
sss
ss
ss
s
sss
s
sZ
sV
I
TH
TH
Para hallar Cv debemos tener en cuenta que
el capacitor comprende una reactancia y una fuente en serie. Entonces:
( )ssss
s
ssIVC
510
2000110
102510 3
2
3
+⋅++
+−=+⋅=
5) Antitransformación
El objeto de este ejemplo era llegar a las expresiones en transformada de Laplace de las variables ( CV e I ) ya que los métodos de antitransformación se exponen más
adelante. Una vez leído el punto dedicado a dichos métodos, se sugiere antitransformar las expresiones obtenidas. Los resultados son los siguientes:
tt eei ⋅−⋅− ⋅+⋅−= 2387 4,04,2
tt
C eev ⋅−⋅− ⋅+⋅−−= 2387 66,1766,275
13 Transformación inversa de Laplace
13.1 Fracciones simples
Fórmula general
La Transformación inversa de Laplace de una función )(sF permite obtener la
función del tiempo )(tf cuya Transformada de Laplace es )(sF .
La Transformación inversa se puede obtener mediante la siguiente integral:
∫∞+
∞−
⋅⋅=
j
j
s
st
t dsFej
f1
1
)()(2
1σ
σπ
[13.1]
donde 1σ es un número real mayor que la parte real de todos los polos de la función.
Afortunadamente, para realizar las transformaciones inversas que surgen de los problemas de Electrotecnia, podemos basarnos en las mismas tablas usadas para obtener las transformadas. Sin embargo, frecuentemente no
+
THV
THZ
+
s
5
s
310
+
CV
-
I
FIG.12.17 EQUIVALENTE DE THÈVENIN DEL CIRCUITO.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 18 de 74
encontraremos en esas tablas la función a antitransformar, por lo que será necesario llevar a cabo algunos manejos matemáticos para desagregarla en funciones que sí estén en las tablas.
Funciones cocientes de polinomios
En general, las funciones de la variable de Laplace que debemos manejar son cocientes de polinomios:
)(
)(
)(
s
s
sQ
PF = [13.2]
Si factorizamos el polinomio del denominador en sus raíces, 1q , 2q , … etc.,
( ) ( ) ( )nin
s
s
s
sqsqsqsa
P
Q
PF
−−−==
LL1
)(
)(
)(
)( [13.3]
podremos descomponer la función en una suma de fracciones simples:
( ) ( ) ( )nn
i
is
qs
A
qs
A
qs
AF
−++
−++
−= LL
1
1)( [13.4]
que son fácilmente antitransformables: tq
n
tq
i
tq
tni eAeAeAf ++++= LL1
1)( [13.5]
Este planteo sencillo no contempla la existencia de raíces múltiples.
El planteo general establece que la fracción correspondiente a cada raíz múltiple, debe tener en el numerador un polinomio completo un grado menor a la multiplicidad de la raíz, como se muestra en el siguiente ejemplo.
( )( ) ( ) ( )2654
3
32
2
1
23
2
)(3232
32
+
++
++
++=
++
+=
s
AsA
s
A
s
AsAsA
sss
sF s
Vemos que esta regla se verifica también para las fracciones con raíces simples, cuyo numerador es una constante, o sea un polinomio de grado cero.
Otra forma de plantear la descomposición en fracciones simples, cuando hay raíces múltiples, es la de generar para cada uno de ellos tantas fracciones como su multiplicidad, de manera que los denominadores están elevados a potencias que van decreciendo desde el grado de multiplicidad del polo hasta 1, y los numeradores son constantes, tal como se muestra para el mismo ejemplo anterior.
( )( ) ( ) ( ) ( )33232
32 6
2
543
2
2
3
1
23
2
)(+
++
++
+++=++
+=
s
B
s
B
s
A
s
B
s
B
s
B
sss
sF s
En esta última forma de plantear la descomposición en fracciones simples hemos usado la letra B para las constantes relacionadas con los polos múltiples con el fin de hacer evidente que pueden ser distintas a las del planteo anterior. Las constantes de los polos simples son iguales en ambos casos.
! La cantidad de constantes necesarias, para que la descomposición en fracciones simples tenga solución, es igual al grado del polinomio denominador.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 19 de 74
A continuación se exponen algunos métodos prácticos para llevar a cabo la descomposición en fracciones simples. No incluiremos demostraciones formales, sino algunos fundamentos para ayudar a su comprensión.
Comenzaremos por métodos generales, aplicables a cualquier función que sea cociente de polinomios, para seguir con métodos que resultan más convenientes ante ciertas características de la función a antitransformar.
13.2 Métodos generales
Asignación de valores
Planteada la descomposición en fracciones simples de una función, la igualdad entre la función y la suma de fracciones simples se debe verificar para todos los valores de la variable s .
Si el denominador de la función es de grado n , la descomposición en fracciones simples tendrá n constantes que debemos determinar. Asignando sucesivamente n valores distintos a la variable s , con la condición de que ninguno de ellos coincida con alguna raíz del denominador, obtendremos un conjunto de n ecuaciones con n incógnitas (las referidas constantes).
Ejemplo:
Sea )2()1()2)(1(
532 43
2
21
2
2
)(+
++
++
==++
++=
s
A
s
A
s
AsAendodescomponi
sss
ssF s LL
Se ve que como el grado del denominador es 4, aparecen 4 constantes, 2 de ellas correspondientes a la raíz doble.
Asignamos a la variable los valores que nos resulten más cómodos, salvo 0, -1 y -2, que son raíces del denominador (de usar uno de ellos generaríamos una división por cero). Por ejemplo: 1=s , 2=s , 5,0−=s y 5,0=s
++
++
+⋅=
++
+⋅+⋅
+−+
+−+
−
+−⋅=
+−+−−
+−⋅+−⋅
++
++
+⋅=
++
+⋅+⋅
++
++
+⋅=
++
+⋅+⋅
)25,0()15,0(5,0
5,0
)25,0)(15,0(5,0
55,035,02
)25,0()15,0()5,0(
)5,0(
)25,0)(15,0()5,0(
5)5,0(3)5,0(2
)22()12(2
2
)22)(12(2
52322
)21()11(1
1
)21)(11(1
51312
43
2
21
2
2
43
2
21
2
2
43
2
21
2
2
43
2
21
2
2
AAAA
AAAA
AAAA
AAAA
+++=
+++−=
+++=
+++=
⇒
5
2
3
242
15
112
3
2242
3
64
434248
19
323
5
4321
4321
4321
4321
AAAA
AAAA
AAAA
AAAA
La solución es: 4742549 4321 −===−= AAAA
La aplicación manual de este método es muy trabajosa cuando tenemos más de 3 constantes, pero como se puede aplicar siempre, y es sistemático, resulta apropiado para resolver con calculadora o programa de computadora.
Igualación de numeradores
Este método consta de los siguientes pasos:

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 20 de 74
o Se plantea la descomposición en fracciones simples.
o Se hace la suma de esas fracciones, cuyo común denominador es idéntico al de la función dada. Por su parte, el numerador, si bien también es igual al de la función dada, queda expresado en función de las constantes que hay que determinar.
o Comparando los coeficientes de los términos de igual grado del numerador de la función dada con los de la suma de las fracciones simples logramos establecer un conjunto de ecuaciones que permite despejar las incógnitas.
Ejemplo:
Sea )2()1()2)(1(
24 43
2
21
2)(+
++
++
==++
−=
s
A
s
A
s
AsAendodescomponi
sss
sF s LL
Ahora sumamos las fracciones y agrupamos términos de igual grado del numerador:
( )
( )
( ) ( ) ( ))2)(1(
23223
)2)(1(
22323
)2)(1(
2)23(
)2)(1(
)1()2()2)(1(
)2()1()2)(1(
24
2
221
2
4321
3
431
2
2
4
3
4
2
3
3
322
2
21
2
1
3
1
2
2
4
3
4
2
3
3
3
2
21
2
2
4
2
321
43
2
21
2
++
+++++++++=
=++
+++++++++=
=++
+++++++=
=++
+++++++=
=+
++
++
=++
−
sss
AsAAsAAAAsAAA
sss
sAsAsAsAAsAsAsAsAsA
sss
sAsAsAsAssAsA
sss
ssAssAssAsA
s
A
s
A
s
AsA
sss
s
Comparando los coeficientes del numerador de la suma de fracciones con el de la función dada obtenemos el sistema de ecuaciones buscado.
( )( ) ( )( ) ( )
( )
=
−=+
=+++
=++
442
3232
2023
10
2
21
4321
431
A
AA
AAAA
AAA
( ) ( )
( ) ( )( )( )
( ) 2'16
'2102
'14:21
4324
43
43
43
12
−=⇒→=⇒
=+
=+
−=⇒→=⇒
AARestando
AA
AAyaLlevando
AA
Una característica relevante de estos sistemas es que las ecuaciones no son completas, de manera que resulta muy sencillo despejar las incógnitas, como se muestra arriba.
El resultado de la descomposición en fracciones simples es el siguiente:
)2(
2
)1(
624
)2(
2
)1(
624
)2)(1(
24222)(
+
−+
+++
−=
+
−+
++
+−=
++
−=
sssssss
s
sss
sF s
Todos los términos son transformadas de funciones comunes, fáciles de recordar o de encontrar en cualquier Tabla de Transformadas (Ver Tabla 1 del Anexo B)
La antitransformada es: tt
t eetf ⋅−− ⋅−⋅+⋅+−= 2
)( 2624
13.3 Métodos particulares Los métodos que veremos a continuación resultan más sencillos cuando las funciones tienen determinadas características.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 21 de 74
Regla de Heaviside para polos simples
Los polos de una función son los valores de la variable para los cuales toma valores infinitos. Para una función consistente en el cociente de dos polinomios son los ceros o raíces de su denominador.
La regla general de Heaviside permite resolver la descomposición en fracciones simples de funciones con polos múltiples, pero en tal caso su aplicación no resulta práctica. Por ese motivo ceñimos su aplicación a funciones con polos simples, caso en que es muy sencilla.
La siguiente es una función de ese tipo. El denominador tiene grado n y se ha factorizado en sus n raíces simples. La descomposición propuesta consta entonces de n fracciones simples, cada una con una constante en su numerador.
( ) ( ) ( ) n
n
k
k
nkn
s
s
s
sqs
A
qs
A
qs
A
qsqsqsa
P
Q
PF
−+
−++
−=
−−−== LL
LL 1
1
1
)(
)(
)(
)(
A continuación despejaremos la constante genérica kA . Como todas las fracciones simples son semejantes, lo que resulte para esa constante será aplicable a las demás.
Multiplicamos )(sF por ( )kqs −
( ) ( ) ( )
n
knk
kks
qs
qsAA
qs
qsAqsF
−
−++++
−
−=− LL
1
1)(
Esto produce las siguientes simplificaciones:
desaparece ( )kqs − denominador de la función dada
en la fracción que contienekA desaparece el denominador ( )kqs −
Si hacemos kqs = , las fracciones que contienen las demás constantes se
anulan, quedando despejadakA .
( ) kqsks AqsFk
=−=)(
Expresada en forma práctica, la regla para calcular la constante de cualquiera
de las fracciones simples como k
k
qs
A
−, sería la siguiente:
o Se factoriza el denominador de la función en sus raíces.
o Se elimina del denominador de la función dada el factor ( )kqs −
o kA es el valor de lo que queda de la función dada, cuando se reemplaza
la variable s por kq
Ejemplo:
Sea )3)(2(
12)(
++
−=
sss
sF s (el denominador ya está factorizado)

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 22 de 74
Se plantea la descomposición: )3()2()3)(2(
12 321
++
++=
++
−
s
A
s
A
s
A
sss
s
De acuerdo con la regla: 6
1
32
1
)3)(2(
12
0
1 −=⋅
−=
++
−=
=sss
sA
2
5
)32(2
1)2(2
)3(
12
2
2 =+−−
−−=
+
−=
−=sss
sA
3
7
)23(3
1)3(2
)2(
12
3
3
−=
+−−
−−=
+
−=
−=sss
sA
El resultado es: tt
ts eefsss
F ⋅−⋅− −+−=⇒+
−+
++
−= 32
)(
27
25
61
)(2
7
2
5
6
1
32
Ejemplo.
Sea ( )( )1341
32)(
+++=
sss
sF s
Las raíces del término cuadrático son complejas: js 322,1 ±−= ,y además conjugadas
ya que el término cuadrático tiene coeficientes reales; entonces:
( )( )( ) ( ) ( ) ( )js
A
js
A
s
A
jsjss
sF s
3232132321
3 321)(
+++
−++
+=
++−++=
Veremos luego que hay otro modo de abordar el caso de raíces complejas evitando el manejo de números complejos.
Aplicando la regla de Heaviside:
( )( ) 10
3
321321
)1(31
−=
++−−+−
−=
jjA
( )( )( )
( )( )j
jj
j
j
jjj
jA 55,015,0
40
2632
26
32
3232132
3232 −=
+−+−=
−−
+−=
+++−++−
+−=
( )( )( )
( )( )j
jj
j
j
jjj
jA 55,015,0
40
2632
26
32
3232132
3233 +=
−−−−=
+−
−−=
−+−−+−−
−−=
Reemplazando: ( ) ( ) ( )js
j
js
j
sF s
32
55,015,0
32
55,015,0
110
3)(
−+
++
−+
−+
+
−==
La antitransformada es directa:
( ) ( ) ( ) ( ) tjtjtjtjt
t ejeejeef ⋅−−⋅−−⋅+−⋅+−− ⋅+⋅+⋅−⋅+−= 32323232
)( 55,015,055,015,010
3
El problema está matemáticamente resuelto, sin embargo, la forma en que ha quedado expresado el resultado no es conveniente, ya que da la impresión de ser complejo cuando las funciones del tiempo no lo son. Trabajemos entonces la expresión para transformarla en una que sea claramente real.
( )
( ) ( )[ ]tjtjtjtjtt
tjtjtjtjtt
t
eejeeee
ejeejeeef
33332
33332
)(
55,015,010
3
55,015,055,015,010
3
−−⋅−−
−−⋅−−
−⋅−+⋅+−=
=⋅+⋅+⋅−⋅+−=
Podemos aplicar las identidades de Ëuler:
αααα αα jsenejsene jj −=+= − coscos
o sus equivalentes:

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 23 de 74
2
cos2
αααα
ααjjjj ee
j
eesen
−− +=
−=
Por la forma en que están reunidos los términos de nuestra expresión es conveniente aplicar estas últimas:
[ ] ( )ttseneetsenteef tttt
t 3cos3,031,110
33255,03cos215,0
10
3 22
)( +⋅+−=⋅⋅+⋅⋅+−= −−−−
Ahora no queda dudas de que la expresión es real.
Aplicación del Teorema del Desplazamiento de la variable s
Si bien la regla de Heaviside es válida cuando el denominador de la función a antitransformar tiene raíces complejas, vimos que produce expresiones que requieren una elaboración posterior para llegar a una expresión adecuada.
El Teorema del desplazamiento de la variable s establece:
Si )()(
1
)()(
1
teas
F-
tsF
- ff ta⋅=
+⇒=
⋅−LL
La aplicación de este teorema a las funciones seno y coseno, que aparecen cuando hay raíces complejas, es la siguiente:
( )tsene
astsen
s
ta--
ωω
ωω
ω
ω ⋅−→++
⇒→+
11
2222
LL [13.6]
( )( )
teas
ast
s
s ta--
ωω
ωω
coscos11
2222
⋅−→++
+⇒→
+
LL [13.7]
Entonces, cuando encontramos raíces complejas procuramos llevar la expresión a antitransformar a una de las formas precedentes. Para ello disponemos dos procedimientos: el de completar el cuadrado y el de la diferencia de cuadrados.
Nada mejor que verlos a través de unos ejemplos.
Ejemplo.
Sea 4012
102)(
++=
ssF s
Las raíces del denominador son complejas: js 262,1 ±−=
Completar el cuadrado
El procedimiento de completar el cuadrado consiste en reemplazar la expresión
cuadrática dada por un binomio al cuadrado como ( )2as + más una constante, como 2ω .
Llevado a este ejemplo: ( ) 222 4012 ω++=++ asss
Si desarrollamos el binomio al cuadrado:
2222 24012 ω+++=++ aassss
Comparando vemos que ass 212 = , (el doble producto de ambos términos del binomio), con lo cual 6=a .

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 24 de 74
Luego, vemos que 4022 =+ ωa , dónde 362 =a . Entonces, 42 =ω
( ) ( ) 2222)(26
25
46
10
4012
10
++=
++=
++=
ssssF s
Lo último que hemos hecho es arreglar las constantes de manera que en el numerador quede explícita ω , con lo que tenemos una función igual a la indicada en [13.6], multiplicada por la constante 5.
Diferencia de cuadrados
Si factorizamos el denominador en sus raíces tenemos:
( )( )jsjsss 262640122 ++−+=++
Factoreando como diferencia de cuadrados: ( ) ( ) 22 yxyxyx −=−+ , siendo en este
caso ( )6+= sx e jy 2= , podemos escribir:
( ) ( ) 22222)(
26
25
26
10
4012
10
++=
++=
++=
ssssF s
Notar que ( ) 2222 +=− j
En ambos casos llegamos a lo mismo. Teniendo en cuenta el Teorema del Desplazamiento, la antitransformada es inmediata.
tsenef t
t ⋅⋅= ⋅− 25 6
)(
Ejemplo.
Sea 204
5102)(
++
+=
ss
sF s
Las raíces del denominador son complejas: js 422,1 ±−=
Apliquemos el procedimiento de completar el cuadrado. El binomio al cuadrado
contenido en la expresión cuadrática del numerador debe ser ( ) 442 22++=+ sss .
Ese binomio más 16 es igual al denominador dado, entonces:
( ) 162
510
204
51022)(
++
+=
++
+=
s
s
ss
sF s
Para que sea factible aplicar el Teorema del Desplazamiento, en el numerador deberíamos tener ( )2+s , igual que en el denominador. Para ello sumamos y restamos 2 a la variable y reagrupamos los términos.
( )( )
( )( ) ( ) ( ) 2222222)(
42
2
2
15
42
210
42
15210
162
52210
++−
++
+=
++
−+=
++
+−+=
ss
s
s
s
s
sF s
También hemos separado la expresión en dos partes, de manera que en el numerador de una de ellas dejamos la variable variable s desplazada y en el de la otra reunimos las constantes. La antitransfromada de la primera dará lugar a un coseno y la de la segunda a un seno, ambos multiplicados por la exponencial.
( )tsentef t
t ⋅−⋅= ⋅− 25,72cos102
)(

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 25 de 74
13.4 Métodos combinados Los métodos particulares son mucho más simples que los generales, pero se pueden aplicar sólo cuando la función dada cumple determinadas características.
De todas maneras, cuando no las cumple, la combinación de métodos suele ser el camino más adecuado para lograr la descomposición en fracciones simples.
Heaviside + Métodos generales
Cuando una función tiene polos simples y múltiples, podemos utilizar la regla de Heaviside que hemos visto para calcular las constantes correspondientes a los polos simples. Esa regla también nos permite calcular una de las constantes que genera cada polo múltiple.
Veamos esto a través de un ejemplo.
Sea ( ) ( )21
523)(
++
+=
ss
sF s función con un polo triple en -1.
Proponemos la descomposición en fracciones simples con numeradores constantes:
( ) ( ) ( ) ( ) ( ) ( )211121
52 43
2
2
3
1
3 ++
++
++
+=
++
+
s
A
s
A
s
A
s
A
ss
s
Podemos demostrar que la constante 4A , correspondiente a la raíz simple, se puede calcular como cuando todas las raíces son simples.
Multiplicamos ambos miembros por el denominador de 4A , es decir por )2( +s
( )( )
( )( )
( )( )
( ) 43
2
2
3
1
31
2
1
2
1
2
1
52A
s
sA
s
sA
s
sA
s
s+
+
++
+
++
+
+=
+
+
y reemplazamos la variable por la raíz del denominador de esa constante (-2)
( )1
12
5)2(244 −=⇒=
+−
+−AA
Veamos que ocurre si hacemos lo mismo para las constantes correspondientes al polo múltiple. Comencemos por la que tiene el denominador de mayor grado, es decir 1A , multiplicando ambos miembros por ese denominador.
( )
( ) ( ) ( )( ) ( ) 1
3
42
32121
5)1(21
2
111
2
52Aspara
s
sAsAsAA
s
s=
+−
+−⇒−=
+
++++++=
+
+
No hubo problema para despejar la constante 31 =A .
Sigamos con 2A . Para seguir la regla deberíamos multiplicar ambos miembros por su
denominador ( )21+s
( )( ) ( )( ) ( )
( )21
1112
522
432
1
+
+++++
+=
++
+
s
sAsAA
s
A
ss
s

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 26 de 74
Al reemplazar por -1 aparece una división por cero en el primer miembro y otra en el segundo. Esto provoca una indeterminación que impide despejar 2A .
Si repetimos el proceso para la otra constante relacionada con el polo múltiple ( 3A ),
llegaremos a una indeterminación similar.
La conclusión es que cuando hay raíces múltiples, expandiendo en fracciones simples con numeradores constantes, se puede aplicar la regla de Heaviside para hallar las constantes de los polos simples y la del denominador de mayor grado de cada polo múltiple. En otras palabras, se podrán calcular de este modo las constantes de los factores explícitos en el denominador de la función dada. En este ejemplo tales factores son: ( )31+s y ( )2+s
Para hallar las constantes que falta podemos aplicar un método general como de asignación de valores
Si en el ejemplo anterior, reemplazamos las constantes halladas:
( ) ( ) ( ) ( ) ( ) ( )21
111
3
21
52 3
2
2
33 +
−+
++
++
+=
++
+
ss
A
s
A
sss
s
y luego asignamos valores como 0=s y 1=s , tendremos un sistema de 2 ecuaciones para hallar las 2 constantes que faltan:
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
=+
−+
++
++
+=
++
+
=+
−+
++
++
+=
+
+⋅
121
1
111111
3
2111
52
020
1
101010
3
210
502
3
2
2
33
3
2
2
33
sAA
sAA
De aquí:
+=
+=
32
32
21
0
AA
AA1;1 32 =−=⇒ AA
Ejemplo.
Sea ( ) ( )21
122
2
)(++
+=
sss
sF s
Planteamos la descomposición en fracciones simples con constantes en los numeradores.
( ) ( ) ( )211
54
2
32
2
1)(
++
++
+++=
s
A
s
A
s
A
s
A
s
AF s
Se pueden calcular con la regla de Heaviside la constante del polo simple, 5A y las
constantes 1A y 3A de los polos dobles.
( )( ) ( ) 4
5
122
1222
2
5 =+−−
+−=A
( ) ( ) 2
1
2010
102
2
1 =++
+=A
( ) ( ) ( )24
5
11
2
2
1 4
2
2
2)(+
++
++
++=⇒ss
A
ss
A
sF s
( )( ) ( )
21
2
211
112
2
3 ==+−−
+−=A

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 27 de 74
Luego asignamos valores, por ejemplo, 1=s y 2
1=s
( ) ( ) ( ) ( ) ( )
( )( ) ( )( ) ( )( ) ( ) ( ) ( )( ) ( )( ) ( )( )
=+
++
++
++⋅
=++
+
=+
++
++
++⋅
=++
+
21
21
21
4
2
21
21
2
2
21
21
2
21
2
21
2
21
4
2
2
222
2
24
5
11
2
2
1
21
1
1214
5
1111
2
112
1
21111
11
sAA
sAA
De aquí:
+=−
+=−
3
22
2
5
24
5
42
42
AA
AA
0
4
5
4
2
=
−=⇒
A
A
( ) ( )tt
ts etetfssss
F ⋅−− ++−=⇒+
++
+−=⇒ 2
)(22)(4
52
4
5
2
1
24
5
1
2
4
5
2
1
Aplicaciones sucesivas de Heaviside
No es común encontrar en los problemas de electrotecnia funciones con más de un polo múltiple y multiplicidad mayor a 2. En el siguiente ejemplo se muestra como se puede realizar la descomposición en fracciones simples de una función con un polo doble usando la regla de Heaviside para polos simples.
Sea: ( )123
2)(+
+=
ss
sF s
Separamos el término al cuadrado y reagrupamos la expresión de manera que una parte de ella, a la que llamamos )(sG , tiene solamente polos simples.
( )321)(
1
231)(
sG
sss
s
sF
+
+=
Aplicamos la regla de Heaviside a )(sG
( ) 11
23 21)(
++=
+
+=
s
A
s
A
ss
sG s
( )1
1
2132
10
20321 =
−
+−==
+
+⋅= AA
Luego reemplazamos )(sG descompuesta en fracciones simples en la expresión
de )(sF
( )321)(
1
12
1
1212)(
sM
sssssss
F+
+=
++=
Se generó una expresión donde tenemos una parte, )(sM , que aún debe
descomponerse en fracciones simples, pero como sus polos son simples, aplicando nuevamente la Regla de Heaviside, el problema queda resuelto.
( ) 11
1 21)(
++=
+=
s
B
s
B
ssM s 1
1
11
10
121 −=
−==
+= BB

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 28 de 74
Reemplazando en la expresión de )(sF :
t
ts etfsss
F- −−+=→
+−+= 12
1
112)(2)(
1L
Polos múltiples y polos complejos
Nos referimos al caso en que la función tiene polos múltiples reales y polos complejos, como el siguiente ejemplo.
( ) 34)(0:258
2322)( jsydoblespolos
sss
sF s ±==→
++
+=
Como ocurre frecuentemente se disponen varios caminos para resolver el problema. Interesa elegir el más simple, pero para ello no existen reglas fijas.
En este caso podríamos optar, entre otros, por los siguientes:
o Viendo que hay un único polo múltiple (doble), podemos recurrir a la aplicación sucesiva de Heaviside para polos simples. Pero como los polos simples son complejos, tendremos cierta complicación para realizar las simplificaciones que nos lleven a una expresión explícitamente real.
o Podemos hallar las constantes correspondientes a los polos simples y una de las dos constantes del polo doble, con la regla de Heaviside para polos simples. Luego por asignación de un valor obtendríamos la constante del polo doble que nos falta. Encontraríamos la misma dificultad que en el caso anterior para simplificar la expresión.
o Podemos mantener la expresión cuadrática del denominador (que encierra las raíces complejas) hallando las constantes por algún método general (el de igualación de numeradores suele ser el más simple) y en el momento adecuado utilizar el método de “completar el cuadrado” para obtener una expresión relativamente fácil de antitransformar.
Se recomienda al alumno hacer el ejercicio de descomponer la función dada usando todos métodos aquí indicados, y cualquier otro que se le ocurra, a fin de evaluarlos por si mismo.
Aquí resolvemos el ejemplo usando el último de ellos, aunque con una ligera variante, según veremos.
( ) 258258
232
43
2
21
22)(++
++
+=
++
+=
ss
AsA
s
AsA
sss
sF s
La descomposición está planteada generando una fracción por cada factor del denominador, con sus numeradores un grado menor que el denominador. Si separamos la fracción correspondiente a la raíz doble en dos con numeradores constantes, queda:
2
21
2
21
s
A
s
A
s
AsA+=
+
Vemos que el valor de 2A , correspondiente al denominador de mayor grado, se puede hallar fácilmente mediante la regla de Heaviside, especialmente en este caso en el que la raíz involucrada es cero.
Así: 08,025
2
25080
20322 ==
+⋅+
+⋅=A

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 29 de 74
Entonces quedan por hallar 3 de las cuatro constantes.
Aplicamos el método de igualación de numeradores.
( ) ( ) =++
+++++++=
++
++
+=
++
+=
258
2258
258258
2322
2
4
3
325162
252
1
2
1
3
1
2
43
2
252
1
22)(sss
sAsAsssAsAsA
ss
AsA
s
sA
sss
sF s
( )( ) ( ) ( )
( )258
2258
258
2322
2516
1
2
4252
1
3
31
22 ++
+++++++=
++
+⇒
sss
sAsAAsAA
sss
s
Comparando numeradores:
=
=+
=++
=+
22
325
08
0
2516
1
4252
1
31
A
AA
AA
Sobra una ecuación pues ya conocemos una constante.
De la tercera obtenemos 091,0625
591 ≅=A y de la primera: 091,013 −≅−= AA
Reemplazando 1A en la segunda ecuación, obtenemos 84,0625
5224 −≅−=A
Ahora es el momento oportuno de completar el cuadrado en el denominador de la
expresión con raíces simples: ( ) 9425822 ++=++ sss
A la vez reemplazamos los valores de las constantes.
( ) 222)(34
84,0091,008,0091,0
++
+−+−=
s
s
ssF s
La anti-transformada de los dos primeros sumandos es directa.
En el denominador del tercero aparece la variable s desplazada. Como en el numerador también está la variable s , a fin de poder aplicar el teorema del desplazamiento, debemos manipularlo para generar una expresión en la que la variable tenga el mismo desplazamiento en el numerador y el denominador. De tal manera tendremos una expresión como la [13.7], que origina un coseno multiplicado por una exponencial. En el manipuleo del numerador, en general sobra una constante que produce una expresión como la [13.6], que origina un seno multiplicado por una exponencial.
Entonces, como el desplazamiento de la variable en el denominador es -4, en el numerador sumamos y restamos 4. Luego agrupamos términos, como se muestra a continuación.
( )( )
( )( )
( )( )
( )( ) ( ) 22222
22
48,0
222
222)(
34
316,0
34
4091,0
08,0091,0
3
3
34
84,04091,0
34
4091,008,0091,0
34
84,044091,008,0091,0
++−
++
+−+−=
=⋅++
+−−
++
+−+−=
=++
+−+−+−=
ss
s
ss
ss
s
ss
s
s
ssF s
44 844 76
Ahora sí, antitransformamos:
( )tsentetf t
t 316,03cos091,008,0091,0 3
)( +−⋅+−= ⋅−
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 30 de 74
14 Funciones de red Las funciones de red son la relación entre la excitación y la correspondiente respuesta de la red, en el campo de la Transformada de Laplace.
Esto podemos expresarlo de la siguiente manera: )(
)(
)(
s
s
sE
RF = [14.1]
)(sF es la Función de Red
)(sE es la Función Excitación y
)(sR es la Función Respuesta
La excitación está dada por una fuente de tensión o corriente que energiza la red, mientras que la respuesta es la variable, corriente o tensión, de interés.
La importancia de las Funciones de Red es que dependen sólo de la topología y de los parámetros de la red a la que corresponden, independientemente de la excitación que se aplique. Entonces, según se desprende de la ecuación [14.1], conocida la Función de Red, se puede hallar la Respuesta para cualquier excitación, multiplicando la excitación por la Función de Red (ecuación [14.2])
Veremos a continuación cuáles son las Funciones de Red y luego las restricciones que se deben observar para que se las pueda definir.
14.1 Inmitancias Se llama Inmitancias a las Funciones de Red de las redes de dos terminales.
Tales redes se denominan dipolos o redes de un puerto.
Un puerto es un par de terminales en los que la corriente que entra por un terminal sale por el otro.
Esta definición cobra sentido en otro tipo de redes, ya que en la de dos terminales resulta una obviedad.
En los dipolos tenemos sólo dos variables; si una es la excitación, la otra es la respuesta. Las inmitancias son:
Impedancia )(
)(
)(
s
s
sI
VZ = [14.3]
Admitancia )(
)(
)(
s
s
sV
IY =
[14.2] )(sF )(sE )()()( sss FER ⋅=
FIG.14.1 SISTEMA GENÉRICO CARACTERIZADO POR SU FUNCIÓN DE RED
)(sV
)(sI
FIG.14.2 DIPOLO

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 31 de 74
[14.4]
El comportamiento del dipolo lo define una sola Función de red, ya que conocida una de las inmitancias, la otra se puede obtener como la inversa:
)(
)(
1
s
sZ
Y = [14.5]
Estas funciones de red, que resultan del cociente de funciones de distinta dimensión (tensiones y corrientes), tienen dimensión propia (ohmios o siemens1), por lo que se denominan dimensionales.
14.2 Transferencias Se llaman Transferencias las Funciones de Red de las redes de dos pares de terminales.
Dichas redes se llaman cuadripolos o redes de dos puertos.
En general en un puerto (llamado de entrada) se aplica la excitación, y en el otro puerto (de salida) se obtiene la respuesta.
Las Transferencias son las funciones que relacionan una variable del puerto de salida (respuesta) con una del puerto de entrada (excitación), tal como se definió en [14.1]. Hay 4 diferentes relaciones respuesta/excitación además de sus 4 inversas. Nos manejaremos con las 4 primeras, que responden a la definición. Son las que se representan en el siguiente cuadro.
FIG. 14.4 FUNCIONES TRANSFERENCIA
1 Siemens: unidad de conductancia (inversa del ohm)
Respuestas
Excitaciones 2V 2I
1V 1
2
V
VTV = [14.6]
1
212
V
IY = [14.7]
1I 1
212
I
VZ = [14.8]
1
2
I
ITI = [14.9]
1V 2V
2I 1I
FIG.14.3 CUADRIPOLO
ENTRADA SALIDA

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 32 de 74
Las dos primeras relacionan variables del mismo tipo por lo que son adimensionales. Se llaman Transferencia de tensiones ( VT ) y Transferencia
de Corrientes ( IT )
Las otras dos son de tipo dimensionales, como las funciones de los dipolos, pero en este caso, por relacionar variables de uno y otro extremo del cuadripolo, forman su nombre agregando el prefijo trans. Se las llama trans-impedancia ( 12Z ) y trans-admitancia ( 12Y ).
14.3 Restricciones Las Funciones de Red se pueden definir con las siguientes restricciones:
• Deben ser Funciones de la variable de Laplace.
• La red no debe tener fuentes independientes.
• La red debe tener condiciones iniciales nulas.
A través de unos sencillos ejemplos podemos interpretar estas restricciones.
Ejemplo de Función de red
Calculemos la Transferencia de Tensiones en el circuito de la figura.
LsR
R
V
VTR
LsR
VV V
+==⇒
+=
1
212
Se observa que es una función de la variable de Laplace y de los parámetros de la red, y es independiente de la excitación.
¿Funciones de red en el tiempo?
Si se pretendiera obtener una función de red en el tiempo para el circuito anterior tendríamos:
11
212 1
v
v
v
vvvv LL −=⇒−=
Vemos que no se puede obtener una relación 1
2
v
v que sea independiente de la
misma 2v o 1v ,
Red con fuente independiente
Agreguemos al circuito anterior una fuente de tensión independiente V y procuremos obtener la transferencia de tensiones.
Ls
R 1V 2V
FIG.14.5 RED SIN FUENTES NI CONDICIONES INICIALES
V
1V 2V
Ls
R
FIG.14.6 RED CON FUENTE INDEPENDIENTE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 33 de 74
RRLs
V
V
V
VR
RLs
VVV
+
−
=⇒+
−= 1
1
212
1
Podemos ver que la relación entre 2V y 1V depende de la propia 1V . Esta “Función de Red” no sería de utilidad, pues es distinta para cada excitación.
Red con condiciones iniciales
Si hubiera una corriente inicial a través del inductor, en el circuito equivalente de Laplace aparecería una fuente de tensión de valor constante )0(iL ⋅ . Su
efecto es equivalente al de la fuente independiente del caso anterior. La relación de tensiones es la siguiente:
RRLs
V
iL
V
V
+
⋅−
= 1
)0(
1
2
1
Debido a la condición inicial, la función obtenida depende de 1V , razón por lo cual no es una Función de Red.
Red con fuente dependiente
En el circuito de la figura hay una fuente dependiente que entrega una tensión proporcional a la corriente de entrada al circuito.
Por Kirchoff
2111 VLsIIkV +⋅=⋅+
Notemos que R
VI 21 =
Remplazando este valor de 1I : 222
1 VLsR
V
R
VkV +⋅=⋅+
kRLs
R
V
V
R
kLsVV
−+=⇒+
−=⇒
1
221 1
En este caso sí pudimos obtener una Función de Red. Podemos observar que depende sólo de los parámetros del circuito: R , L y k (este último es el parámetro que caracteriza la fuente dependiente.
No debemos tomar esto como la demostración de que se pueden definir funciones de red para los circuitos con fuentes dependientes, pero podemos intuir que de una u otra manera, la variable de la que depende una fuente dependiente, se puede poner en función de 1V o 2V , con lo cual no queda un término independiente de 1V o 2V que impida obtener la Transferencia.
1Ik ⋅
1V 2V
Ls
R
+1I
FIG.14.7 RED CON FUENTE DEPENDIENTE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 34 de 74
Las restricciones analizadas para la Transferencia de Tensiones de un cuadripolo muy sencillo son válidas para las demás Funciones de Red (de dipolos o cuadripolos).
14.4 Características matemáticas Las funciones de red cumplen con diversas condiciones matemáticas cuyo conocimiento ayuda a descubrir errores o comprender mejor el comportamiento de los circuitos a los que pertenecen. Veremos las principales.
Cociente de polinomios de coeficientes reales
Las funciones de red provienen de la combinación lineal de términos del tipo Ls (inductores), Cs1 (capacitores), R (resistores) o k (parámetro de una fuente dependiente). Y como además L , C , R y k son reales, resultan ser cocientes de polinomios con coeficientes reales:
0
1
1
0
1
1
)(
)(
)(bsbsb
asasa
Q
PF
m
m
m
m
n
n
n
n
s
s
s+++
+++==
−−
−−
L
L [14.10]
Factorizado en sus raíces:
( ) ( ) ( )( ) ( ) ( ) m
n
m
ns
b
akcon
pspsps
zszszskF =
−−−
−−−= ;
21
21)(
L
L [14.11]
Las constantes z son las raíces del numerador llamadas ceros (hacen cero la función) y p las del denominador llamadas polos (hacen infinito la función)
Según el valor de estas raíces se generan términos de distinto tipo, a saber.
Raíces reales
Los factores son del tipo ( )2−s , ( )5,4+s , etc. En particular, si la raíz es 0, tendremos un factor s .
Raíces complejas
Dado que los coeficientes de los polinomios son reales, de haber raíces complejas son pares conjugados, como ωσ j± . Los factores correspondientes suelen multiplicarse entre sí para evitar constantes complejas:
( )( ) ( ) 22ωσωσωσ +−=+−−− sjsjs
En el caso de raíces imaginarias puras tenemos: ( )( ) 22 ωωω +=+− sjsjs
Hipótesis de estabilidad de las redes pasivas
Una red es estable cuando la energía que entrega como respuesta es menor o igual a la que recibe como excitación. El igual corresponde al caso teórico de redes sin pérdidas de energía en elementos resistivos.
La energía entregada sólo podría ser mayor a la recibida si la red contara con fuentes internas capaces de producir energía. Por lo tanto, la estabilidad es una propiedad de las redes pasivas.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 35 de 74
La respuesta de la red depende de dos factores: la excitación y la función de red que relaciona esa excitación con la respuesta.
)()()( sss FER ⋅=
Como vimos, la función de red es un coeficiente de dos polinomios con coeficientes reales, que en [14.11] se muestran factorizados en sus raíces. Por su parte, la excitación también lo es, como se muestra en la siguiente ecuación, donde también los polinomios se han factorizado en sus raíces.
( ) ( ) ( )( ) ( ) ( )m
n
s
s
sdsdsds
cscscsk
D
NE
−−−
−−−==
L
L
21
211
)(
)(
)( [14.12]
En la realidad este cociente de polinomios suele ser bastante sencillo, como muestran los siguientes ejemplos de excitaciones:
k (impulso) s
k (constante)
22 ω+
⋅
s
sk (coseno)
2s
k (rampa)
Luego, podemos escribir la respuesta combinando [14.11] y [14.12]
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
4444 34444 21L
L
4444 34444 21L
L
reddefunción
m
n
excitación
m
ns
pspsps
zszszs
dsdsds
cscscsKR
−−−
−−−
−−−
−−−=
21
21
21
21)( [14.13]
Podemos obtener la respuesta temporal descomponiendo previamente esta expresión en fracciones simples:
( ) ( ) ( ) ( ) ( ) ( )444444 3444444 21
L
444444 3444444 21
L
reddefunción
n
n
excitación
m
ms
ps
A
ps
A
ps
A
ds
B
ds
B
ds
BR
−++
−+
−+
−++
−+
−=
2
2
1
1
2
2
1
1)( [14.14]
44444 344444 21L
44444 344444 21L
reddefunción
tp
n
tptp
excitación
td
m
tdtd
tnm eAeAeAeBeBeBr⋅⋅⋅⋅⋅⋅ +++++++= 2121
2121)( [14.15]
Se observa que los polos de la excitación ( id ) y de la función de red ( ip ), tienen una importancia fundamental en el tipo2 de respuesta, ya que son los exponentes de sus términos. Por su parte los ceros, ( ic y iz ), que no aparecen explícitamente en la respuesta, inciden sólo en el valor de las constantes.
Además, los términos que dependen de los polos de la excitación se mantienen separados de los que dependen de los polos de la función de red. Esto nos dice que dada una red, cualquiera sea la excitación, la respuesta contendrá siempre un mismo conjunto de términos inherentes a la función de red, y otros términos introducidos por la excitación.
Ejemplo:
Sea )2()5(
2
107
22)(
++=
++=
ssssF s y
sEe st
1010 )()( =⇒=
2 Tipo se refiere a las funciones (seno, exponencial creciente, etc) independientemente de su amplitud.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 36 de 74
La respuesta es:
44 344 21
44344214434421 reddefunción
tt
excitación
t
reddefunciónexcitaciónreddefunción
excitación
s eerssssss
R ⋅−⋅−−−
−−=⇒+
++
+=++
= 2
3105
31
)(
310
31
)( 225
2
)2()5(
210
Se ha indicado de quién depende cada tipo de término. Cabe aclarar que el término constante es originado por la excitación, pero su valor o amplitud es consecuencia de ambas, excitación y función de red. Igualmente, las dos exponenciales son producidas por la función de red, cuyos polos son los exponentes, pero las constantes que las multiplican dependen también de la excitación.
Viendo la virtual independencia con que influyen la excitación y la función de red en los términos de la respuesta, podemos facilitar el análisis de la función de red suponiendo que la excitación es un impulso unitario. Como la transformada de Laplace dicho impulso es 1, la función de red coincide con la función respuesta. Y la respuesta temporal es la anti-transformada de la función de red.
La expresión [14.15] válida para una excitación general, queda reducida a la siguiente:
tp
n
tptp
tneAeAeAr⋅⋅⋅ +++= L21
21)( [14.16]
donde 1p , 2p , etc. son polos de la función de red, que en general pueden ser complejos: iii jp ωσ += ; entonces:
tjt
m
tjttjt
tmm eeAeeAeeAr
⋅⋅⋅⋅⋅⋅ +++= ωσωσωσL2211
21)( [14.17]
Los factores cuyo exponente es la parte imaginaria de los polos devienen en senos y cosenos que toman valores finitos. Por lo tanto, los factores que gravitan en este análisis son los que tienen por exponente la parte real de los polos, que pueden asumir los siguientes valores permanentes:
infinito si el polo tiene parte real positiva
constante si el polo tiene parte real nula
cero si el polo tiene parte real negativa
En una red pasiva, excitada por un impulso (que después del instante inicial permanece en cero), la respuesta permanente debe ser cero. Sin embargo encontramos dos casos en que no es así:
o La red es ideal con lo cual la energía del impulso no tiene dónde disiparse. Por ejemplo, si excitamos con un impulso un circuito L-C con resistencia nula, tendremos una respuesta oscilante permanente.
o Una excitación impulso de corriente puede producir una respuesta de tensión constante en un capacitor (ver ejemplo más abajo), o un impulso de tensión puede producir una respuesta de corriente constante en un inductor. Vemos que en estos casos, la excitación y la respuesta son magnitudes distintas (si una es corriente la otra es tensión) relacionadas mediante las

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 37 de 74
denominadas funciones de red dimensionales.
En conclusión, los polos de una función de red no pueden tener polos con parte real positiva; y pueden tener polos con parte real cero si se trata de funciones de red dimensionales.
Siendo así, en el denominador de una función de red, factorizado en sus raíces (los polos de la función) podemos tener:
Factores con números reales positivos.
Factores con números complejos o imaginarios que se presentan de a pares conjugados. Estos pueden multiplicarse entre sí generando factores de segundo grado con coeficientes reales positivos.
Esto permite establecer las conclusiones que se muestran con unos sencillos ejemplos.
Ejemplos:
Supongamos que los polos de una función de red son: 0 , 2− y j31±− .
( )( )( ) ( ) ( )( )912313122
)()(
)(+++
=−++++
=sss
Pk
jsjsss
PkF
ss
s
Si multiplicamos los factores del denominador, como todos los coeficientes son positivos no hay posibilidad de que haya términos que se cancelen y el polinomio resultante es completo.
( )( ) ( ) ssss
Pk
ssssss
Pk
ssss
Pk
sss
2014420421021022 234
)(
223
)(
2
)(
+++=
+++++=
+++=L
En realidad es completo entre el término de mayor y menor grado. En un caso como este, con un polo en el origen, el menor grado es 1 en lugar de 0.
Consideremos un caso muy especial, en que todos los polos son imaginarios puros, por ejemplo: j2± y j5±
( )( )( )( ) ( )( ) 100292545522 24
)(
22
)()(
)(++
=++
=−+−+
=ss
Pk
ss
Pk
jsjsjsjs
PkF
sss
s
El polinomio no es completo, pero sí están todos los términos de grado par.
Si además de los polos anteriores (imaginarios puros), hubiera un polo en el origen tendríamos otro denominador incompleto pero con todos los términos de grado impar.
( )( ) sss
Pk
sss
PkF
ss
s10029254 35
)(
22
)(
)(++
=++
=
Cs
1
R
1)()( =⇒= Ii tt δ
+
111 )(
12
cteC
vCs
V tC
Z
C ==⇒⋅=
-
FIG. 14.8 EXCITACIÓN CON IMPULSO DE CORRIENTE
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 38 de 74
La conclusión es que el polinomio denominador de una función de red es completo entre el término de mayor y menor grado, salvo que falten todos los términos impares o todos los pares.
Consideremos sobre las funciones de red dimensionales
Inmitancias
Lo visto respecto al denominador de las funciones de red en general, es también aplicable al numerador de las inmitancias (impedancia y admitancia), ya que como una es la inversa de la otra, lo demostrado para el denominador de una vale para el numerador de la otra, y viceversa.
Funciones dimensionales en general
Además podemos determinar que para todas las funciones de red dimensionales existe una relación entre los grados del numerador y del denominador.
Tomemos una función de red genérica, con los polinomios del numerador del denominador factorizados en sus raíces:
lmknsbsbsb
sasasa
Q
PF
l
l
m
m
m
m
k
k
n
n
n
n
s
s
s >>+++
+++==
−−
−− ,
1
1
1
1
)(
)(
)(L
L [14.18]
En los límites ∞→s y 0→s la expresión se reduce a las siguientes:
mn
m
ns
ss
b
aF −
∞→=)(lim lk
l
ks
ss
b
aF −
→=)(
0lim [14.19]
De acuerdo a lo que hemos visto, una función dimensional de un solo término puede ser del tipo Ls , Cs1 o R si es impedancia o Cs , Ls1 o R1 si es admitancia, o sea que el grado de la variable puede ser 1, 0 ó -1. En infinito el grado de la variable es la diferencia de los términos de mayor grado de los polinomios y en el origen es la diferencia de términos de menor grado. Luego, la conclusión es que en una función de red dimensional, los términos de mayor grado de los polinomios que la forman no pueden diferir en más de 1. Y lo mismo con respecto a los términos de menor grado.
Ejemplos:
Esta función impedancia es válida pues los grados mayores y menores difieren en 1. En infinito se comporta como un inductor de 2/3 Hy y en el origen como un capacitor de 1/3 F
Esta otra no es válida. Si bien en el origen es un resistor de 2 ohm, falla en infinito pues los mayores grados difieren en 2.
Consideremos sobre las funciones de red adimensionales
En estas funciones sólo podemos establecer con respecto al grado del numerador que es igual o menor que el del denominador.
s
sZ s
3
12 2
)(
+=
23
12 3
)(+
+=
s
sY s

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 39 de 74
14.5 Respuesta según los polos de la transferencia Veremos en detalle como inciden en la respuesta de una red los polos de su función transferencia según su ubicación en el plano complejo.
Supongamos que una red recibe una excitación finita, cuya transformada, habiendo factorizado el denominador, es:
( )( )L21
)(
1)(dsds
NkE
s
s−−
=
y que )(sF es la función de red que la liga con la respuesta, en la que también
hemos factorizado el denominador:
( )( ) ( )m
s
spspsps
PkF
−−−=
L21
)(
2)(
La función respuesta es:
( )( ) ( )( ) ( )444 3444 21
L
444 3444 21
LLL
reddefunciónladepolosexcitaciónladepolos
m
ss
sps
B
ps
B
ds
A
ds
A
pspsps
P
dsds
NkR +
−+
−++
−+
−=
−−−−−=
2
2
1
1
2
2
1
1
21
)(
21
)(
)(
y en el tiempo:
444 3444 21L
444 3444 21L
reddefunciónladederivados
tptp
excitaciónladederivados
tdtd
t eBeBeAeAr +++++= 2121
2121)(
Para una determinada red, la respuesta tendrá una serie de términos fijos que obedecen a la función de red y otros que dependen de la excitación aplicada.
Independientemente de dónde provengan, cada término hace un aporte característico a la respuesta, dependiendo del valor de su polo.
Polos reales: σ=s
Se distinguen tres tipos de términos con polos reales: con polo positivo, negativo y nulo, como en el siguiente ejemplo:
( )( ) s
A
s
A
s
A
sss
PF
s
s321)(
)(2222
++
+−
=+−
=
El primero, al que corresponde una exponencial creciente, sólo puede provenir de la excitación.
El segundo aporta a la respuesta una exponencial decreciente y el tercero una constante.
Cuando mayor es el valor absoluto del polo, mayor es la pendiente de la exponencial.
Polos imaginarios: ωjs ±=
Estos polos se manifiestan como pares conjugados que generan términos como los que se muestran en el siguiente ejemplo:
0>σ
0<σ
0=σ
FIG. 14.9 TIPOS DE EXPONENCIAL

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 40 de 74
( )( ) 22
)()(
)(ωωω +
=−+
=s
P
jsjs
PF
ss
s
que devienen en el campo del tiempo en senos y/o cosenos.
Cuanto mayor es el polo mayor es la frecuencia.
Polos complejos: ωσ js ±=
Se manifiestan como pares conjugados que producen términos como se muestra en el siguiente ejemplo.
( )( )
( ) 22
)(
)(
)(
ωσ
ωσωσ
++=
=−+++
=
s
P
jsjs
PF
s
s
s
cuya antitransformación da lugar a senos y/o cosenos multiplicados por una exponencial.
Se reúnen aquí las características de los polos reales y de los polos imaginarios. Cuanto mayor es la parte imaginaria, mayor es la frecuencia, y cuanto mayor es el valor absoluto de la parte real, mayor es la pendiente de atenuación o crecimiento de la función.
En la siguiente figura, se muestran en forma comparativa las respuestas proporcionadas por los polos según su ubicación en el plano complejo. Para ceñirnos a las redes pasivas, cuya condición de estables impide la existencia de polos con parte real positiva, graficamos sólo el semiplano del eje real negativo. Los polos se han numerado, asignando el mismo número a la respuesta que les corresponde. Debe notarse que las respuestas con oscilaciones, donde intervienen polos imaginarios o complejos, son producidas por dos polos conjugados.
Cuando la función respuesta tiene varios polos, la respuesta es la suma de la respuesta que corresponde a cada uno de ellos.
FIG. 14.10 SENO NO AMORTIGUADO
FIG.14.11 SENO AMORTIGUADO

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 41 de 74
Observación a la figura.
Los círculos indican la posición de los polos. El número pequeño al costado del círculo de cada polo coincide con el número de la curva que le corresponde. En el caso de polos complejos, hay dos polos por curva. En ese caso se numeran por ejemplo 7 y 7’ correspondiéndoles la curva 7.
2
2
3
3
4
4’
6
6
7
1
1
6’
4
5
5
5’
8
8
8’
7’
7
eℜ
mℑ
FIG. 14.12 APORTE DE CADA POLO EN LA RESPUESTA

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 42 de 74
14.6 Teoremas del valor inicial y final Estos teoremas permiten determinar el valor inicial de una función (en 0=t ), y su valor final (en ∞=t ), partiendo de su transformada de Laplace, sin tener que hacer la antitransformación.
Ambos teoremas surgen de plantear la descomposición por partes de la integral que define la transformada de Laplace de una función.
Recordemos que ∫ ∫ ⋅−⋅=⋅ duvvudvu
Dada dtefFts
ts ∫∞
⋅−⋅=0
)()( , si llamamos dtedvyfu ts
t
⋅−== )( , podemos
poner: dtfess
fdtf
s
e
s
efdtefF t
tst
tsts
t
ts
ts )('
0
)0()(
'
00
)(
0
)()(
1∫∫∫∞
⋅−∞ ⋅−∞⋅−∞
⋅− +=+⋅−=⋅=
Multiplicando ambos miembros por s :
dtfefFs tts
s )('
0
)0()( ∫∞
⋅−+=⋅
Aplicando el límite cuando ∞→s resulta:
)0()('
0
)0()( limlimlim fdtfefFs tts
sss
s=+=⋅ ∫
∞⋅−
∞→∞→∞→
Y aplicando el límite cuando 0→s resulta:
)(0)()0(
0
'
)()0()('
00
)0(0
)(0
limlimlim ∞
∞∞∞
⋅−
→→→=+=+=+=⋅ ∫∫ fffdtffdtfefFs ttt
ts
sss
s
Entonces tenemos:
Teorema del valor inicial: )()0( lim ss
Fsf ⋅=∞→
[14.20]
Teorema del valor final: )(0
)( lim ss
Fsf ⋅=→
∞ [14.21]
Nótese que para obtener el valor en 0=t se hace el límite en ∞=s , y para el valor en ∞=t , se hace el límite en 0=s .
Aplicación
Si aplicamos estos teoremas a la función respuesta )(sR de un circuito eléctrico
tipo cuadripolo, podemos expresarlos en términos de la función excitación )(sE y
la transferencia )(sT :
)()()0( lim sss
TEsr ⋅=∞→
[14.22]
)()(0
)( lim sss
TEsr ⋅=→
∞ [14.23]
)0(r y )(∞r son los valores inicial y final de la respuesta

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 43 de 74
Excitación escalón
En el caso particular de que el circuito se excite con una función escalón (supongamos que de amplitud 1), cuya transformada es 1/s, los valores inicial y final son directamente los límites de la transferencia:
)0()(lim rT ss
=∞→
[14.24]
)()(0
lim ∞→
= rT ss
[14.25]
Ejemplo.
Determinemos los valores inicial y final de la función del tiempo a la que corresponde la siguiente función en la variable de Laplace.
107
1022)(
++
−=
ss
sF s
Valor inicial: 22
107
102lim
2
2
2)0( ==++
−⋅=
∞→ s
s
ss
ssf
s
Valor final: 0107
102lim
20)( =
++
−⋅=
→∞
ss
ssf
s
Verificamos estos resultados anti-transformando la función )(sF .
( )( )tt
ts eefssss
s
ss
sF
⋅−⋅−−−−
+−=⇒+
++
=++
−=
++
−= 5
3202
314
)(3
20
314
2)(5252
102
107
102
De aquí: 2320
314
)0( =+−=f y 0)( =∞f
Pendiente inicial y final
También puede ser importante evaluar la pendiente inicial y final de una función.
Para ello, aplicamos los teoremas del valor inicial y final a la función:
)0()( fFs s −⋅
que es la transformada de la derivada de )(tf . Entonces,
( ) ( ))0()(
2
)0()(
'
)()0(' .limlimlim fsFsfFssfLsf s
ss
st
s−=−⋅⋅=⋅=
∞→∞→∞→ [14.26]
( ))0()(
2
0
'
)(0
)(' .limlim fsFsfLsf s
st
s−==⋅=
→→∞ L [14.27]
Ejemplo.
Determinemos los valores inicial y final de la pendiente de la función del tiempo correspondiente al ejemplo anterior.
Derivada inicial:
2424
107
20142102lim2
107
102lim
2
2
2
23232
2
2'
)0( −=−
=++
−−−−=−
++
−⋅=
∞→∞→ s
s
ss
sssssss
ss
ssf
ss

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 44 de 74
Derivada final: 02107
102lim
2
2
0
'
)( =−++
−⋅=
→∞ s
ss
ssf
s
Vamos a verificar estos resultados derivando )(tf .
tt
t
tt
t eefeef ⋅−⋅−⋅−⋅− −=⇒+−= 5
31002
328'
)(
5
3202
314
)(
Luego, 243100
328'
)0( −=−=f y 0'
)( =∞f

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 45 de 74
15 Excitación con funciones compuestas En el Punto 4 de la Parte I se han definido las funciones compuestas como aquellas formadas por la combinación de funciones básicas según dos modos posibles:
Por superposición. La función está formada por la suma de dos o más funciones básicas.
Por tramos o intervalos. La función que se divide en intervalos, tal que en intervalos contiguos se describe mediante funciones distintas.
El primer caso es muy simple de abordar, como se muestra en 15.1 a través de un ejemplo.
El segundo caso, es decir el de las funciones de excitación compuestas por tramos o intervalos, es el que entraña mayores dificultades, por lo que lo estudiaremos especialmente, presentando varios métodos de resolución.
15.1 Resolución por superposición Supongamos una excitación compuesta por la suma de varios términos:
L++= )(2)(1)( tetete vvv
donde )(1 tev , )(2 tev , etc. son funciones básicas.
Lo único que tenemos que hacer, en el circuito equivalente de Laplace, es colocar una fuente igual a la transformada de la función compuesta.
L++= )(2)(1)( sesese VVV
siendo )(1)(1 tese vV L= ,
)(2)(2 tese vV L= , etc.
Ejemplo
El circuito de la figura está excitado por una tensión compuesta por la suma de una constante y una rampa lineal. Se desea hallar )(tabv .
El valor de la constante es 2 mientras que la pendiente de la rampa es 5.
Entonces la tensión de entrada es tve ⋅+= 52
y su transformada 2
52
ssVe +=
Planteamos el circuito equivalente de Laplace y calculamos abV por divisor de
tensiones
2
4
0,4 t (seg)
ev (Volt)
Tensión aplicada
Hy10
Ω100 Ω100
+
ev
- 0
b
a
FIG.15.1 EXCITACIÓN SUPERPUESTA
s10
100 100
+
2
52
ss+
- b
a
FIG.15.2 CIRCUITO EQUIVALENTE DE LAPLACE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 46 de 74
100
10010010
10010
522
⋅
++
⋅
+=
s
sssVab
( )( )( )
( )( )( ) 55
105,2
10020
1001052100
10010
100002000
52
32
2
1
22
2
+++=
+
++=
+
++=⋅
+
+
+
=s
A
s
A
s
A
ss
ss
ss
ss
s
ss
s
Vab
Por Heaviside: 55
105,21 =
⋅=A ( ) ( )
5,05
1055,2523 −=
+−⋅+−=A
Hallamos 2A por asignación de valor. Eligiendo s=-10, la función dada se hace 0:
5,1510
5,0
1010
50 2
2
2=⇒
+−
−+
−+= AA
Finamente:
t
ab etv ⋅−⋅−+⋅= 5,05,05,15
15.2 Resolución por intervalos Para el caso de funciones compuestas por intervalos, veremos primero el llamado método de resolución por intervalos. Si bien este método es el más intuitivo, cuando la excitación comprende más de dos intervalos, su aplicación se torna muy trabajosa.
Dada una excitación compuesta por dos o más intervalos, como muestra la figura, se resuelve intervalo por intervalo, de la siguiente manera.
Comenzamos por el primer intervalo, donde la excitación es
)(1 tf .
La solución obtenida será válida hasta −= at .
Calculamos los valores de las tensiones en los capacitores y las corrientes de los inductores en −= at .
Esos valores, de acuerdo con las leyes de la conmutación, son válidos en += at , por lo tanto se podrán emplear como condiciones iniciales del segundo intervalo, que se resuelve para la excitación )(2 tf .
Luego calculamos los valores de las tensiones en los capacitores y las corrientes de los inductores en −= bt para aplicarlos como condiciones iniciales del tercer intervalo, donde la excitación es )(3 tf .
Como se ve es un proceso repetitivo, que termina al resolver el último intervalo.
)(1 tf
)(2 tf )(3 tf
I II III t
)(tf
0 a b
FIG.15.3 EXCITACIÓN COMPUESTA POR INTERVALOS

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 47 de 74
Ejemplo.
El mismo circuito del ejemplo anterior se excita con una tensión compuesta por intervalos.
En t=0 se aplica una tensión constante de 4V, la que a partir de t=0,2 seg comienza a decrecer en forma exponencial, con una constante de tiempo de 0,2 segundos.
Primer Intervalo
Planteamos el circuito equivalente de Laplace para condiciones iniciales nulas y 4=ev , cuya transformada de Laplace es:
s
Ve4
=
Debemos tener en cuenta que no sólo hay que calcular la tensión entre a-b sino la corriente a través del inductor, ya que se empleará como condición inicial del segundo intervalo.
Por divisor de tensiones:
( )( ) ( ) 55
202
100002000
10010400
10010
10100100
1004 21
++=
+
+=
+
+=
+
⋅+
=s
A
s
A
ss
s
ss
s
s
ssVab
⇒−=−
+−=== 2
5
20104
5
2021 AA
t
ab ev ⋅−−= 524
Hemos obtenido la tensión deseada en el primer intervalo. Para el segundo intervalo es necesario determinar previamente el valor de la corriente en el inductor al final del primer intervalo, valor que se conservará durante la conmutación, pudiendo emplearse como condición inicial del segundo intervalo.
( )( )
( ) 5
2
5
20254
5
2024
+=
+
−−+=
+
+−=
sss
ss
ss
s
sVL
y la corriente: ( ) 55
2,0
10
21
++=
+==
s
A
s
A
sss
VI LL
Antitransformamos: t
L eiAA ⋅−⋅−=⇒−=−
=== 5
21 04,004,004,05
2,004,0
5
2,0
Y hallamos Li en t=0,2 AeiL 025,004,004,0 1
)2,0( =−= −
Segundo intervalo
Por simplicidad conviene correr el origen de tiempos al comienzo del segundo intervalo Entonces AiL 025,0)0( = .
Luego planteamos el circuito equivalente de Laplace teniendo en cuenta esa condición inicial y la nueva excitación, que es una exponencial que decrece a partir de 4V con una constante de tiempo de 0,2 seg.
Su expresión matemática es: t
e ev ⋅−= 54 y su transformada: 5
4
+=s
Ve
Hy10
2
4
0,2 t (seg)
ev (Volt)
Tensión aplicada
0
Ω100Ω100
+
ev
- b
a
0,4
FIG15.4 CIRCUITO CON EXCITACIÓN COMPUESTA
s10
100 100
b
a
sVe
4=
FIG.15.5 EXCITACIÓN EN EL 1º INTERVALO

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 48 de 74
Resulta conveniente el circuito equivalente del inductor con fuente de corriente en paralelo. Así, la fuente queda en paralelo con el inductor y la resistencia, pudiéndose transformar en fuente de tensión en serie para obtener un circuito de una sola malla.
El paralelo del inductor y el resistor es: 10
100
10010
10010
+=
+
⋅=
s
s
s
sZ
Y la fuente de tensión en serie: ( )10
5,2
+=⋅=s
ZIV
Luego: ( ) ( )( )( )
( ) ( )( ) ( )25200
5,525,6
10002005
4045,125,2
10
10010100
510
10455,2
10
100100
5
4
10
5,2
+
+=
++
+++=
+
++
++
+++
=
++
++
+=s
s
ss
ss
s
ss
ss
ss
s
sssVab
( )( ) ( ) ( )22
510
1
5200
5,6
5200
2055,6
++
+=
+
++=
sss
sVab
La antitransformada del primer término es directa: es una exponencial.
El segundo término es una función del tipo 21 s desplazada, por lo que la antitransformada es la variable t multiplicada por una exponencial. (Se aplica aquí uno de los Teoremas del desplazamiento)
( ) ttt
ab etetev⋅−⋅−⋅− ⋅⋅+=⋅+= 555
1,00325,010
1
200
5,6
No debemos olvidar que cada uno de los resultados obtenidos está referido al origen de su respectivo intervalo.
15.3 Método de Transformada completa de la excitación El método de resolución por intervalos, es trabajoso a partir del segundo intervalo. Ello se debe a que hay que hallar todas las corrientes a través de los inductores y todas las tensiones en los capacitores del circuito, para hallar sus valores al final de cada intervalo y aplicarlos como condiciones iniciales del intervalo siguiente. No sólo hay que determinar más variables que la deseada, sino que en cada intervalo hay que plantear un circuito equivalente complicado por la introducción de las fuentes que representan las condiciones iniciales.
El método de resolución por la transformada completa de la excitación, evita el cálculo de condiciones iniciales y el planteo de circuitos equivalentes para cada uno de los intervalos de la excitación.
s10
100 100
b
a
5
4
+=s
Ve
s
025,0 10
100
+s
s
100
b
a
5
4
+=s
Ve
10
5,2
+s
+
+
FIG.15.6 CIRCUITOS EN EL 2º INTERVALO

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 49 de 74
Hay que hallar la respuesta )(sR en función de la llamada transformada
completa de la excitación )(sE .
Cuando el circuito tiene condiciones iniciales nulas, la respuesta puede obtenerse como el producto de dicha transformada completa de la excitación, )(sE , por la función
de red que corresponda. Es decir: )()()( sss FER ⋅=
La transformada completa de la excitación es la transformada de una función del tiempo que representa la excitación, comprendiendo todos los intervalos que la componen, desde 0=t a ∞ .
El método consta de tres pasos:
o Obtención de la respuesta en función de la excitación. o Transformación completa de la excitación o Antitransformación de la respuesta.
Para desarrollar el método, acompañaremos la explicación con un ejemplo, considerando el circuito de la Fig. 15.7, en el cual la excitación es la tensión de entrada eV , y la respuesta que interesa, la tensión de salida sV .
Obtención de la función respuesta
Abajo del circuito ejemplo hemos dibujado su equivalente de Laplace.
Podemos obtener sV por divisor de tensiones, considerando que esa tensión se desarrolla sobre el paralelo del resistor y el capacitor.
es V
s
ss
s
s
V ⋅
+
++
+=
33
33
33
33
1010
1010
510
1010
1010
Trabajando esta ecuación:
( )( )
( )( ) ( ) 222
2
3
32
3
3
3
3
3
13,145,1
200
13,145,113,145,1
200
2023
200
1010155
10
10510510
10
101510
10
1
10510
1
10
++
⋅=
−+++
⋅=
++
⋅=
=++
⋅=
++++
⋅=
+++
⋅=⋅
+++
+=
s
V
jsjs
V
ss
V
ss
V
sss
V
ss
VV
ss
sV
eee
eeees
La penúltima expresión ya es adecuada para hacer la anti-transformación, pero es preferible la última, que no contiene números complejos y hace evidente que el resultado contendrá senos y/o cosenos multiplicados por una exponencial.
Ω10 Hy5 Fµ1000
+
ve Ωk1
+
sv
-
10 s5
s
310
+
eV 310
+
sV
-
FIG.15.7 CIRCUITO DADO Y SU EQUIVALENTE

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 50 de 74
Transformación completa de una función compuesta (Método general)
Para hallar la transformada de Laplace de una función compuesta por varios intervalos, descripta mediante varias expresiones separadas, primero debemos obtener una expresión del tiempo única.
Para el ejemplo de la figura, la descripción por funciones separadas, sería la siguiente:
<
<<
<<
=
tbf
btaf
atf
f
t
t
t
t
)(3
)(2
)(1
)(
0
Si logramos para cada intervalo una expresión que coincida con la función dada y que valga cero fuera del intervalo, la suma de todas estas expresiones será la función dada escrita como una única función del tiempo.
Para ello contamos con la función pulso (para más detalles referirse a la Parte I, punto 4.3 “Funciones singulares”)
El pulso vale 1 dentro de un intervalo y cero fuera de él. Al multiplicar una función por un pulso, obtenemos una función igual a la dada en el intervalo del pulso y nula fuera de ese intervalo. Esto se muestra en la figura para los tres intervalos del ejemplo.
Entonces:
);()(3);()(2);0()(1)( ∞Ρ⋅+Ρ⋅+Ρ⋅= btbatatt ffff
Expresando los pulsos en función de escalones de Heaviside:
( ) ( )
)()(3
)()()(2)()0()(1)(
btt
btattatttt
f
fff
−
−−−−
Η⋅+
+Η−Η+Η−Η=
Ejemplo
Consideremos la misma excitación del ejemplo del punto anterior. La descripción mediante funciones separadas es:
<⋅
<<= −
−
te
t
v te
2,04
2,004
2,0
2,0
Para escribir la exponencial debemos tener en cuenta su constante de tiempo (0,2) y el corrimiento respecto al origen (también 0,2)
2
4
0,2 t (seg)
ev (Volt)
0 0,4
FIG.15.9 EXCITACIÓN
)(1 tf
)(2 tf )(3 tf
I II III t
)(tf
0 a b
0 a
1 );0()(1 atf Ρ⋅
);()(2 batf Ρ⋅
a
b
b
);()(3 ∞Ρ⋅ btf 1
1
FIG.18.8 DESCOMPOSICIÓN DE LA FUNCIÓN COMPUESTA

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 51 de 74
La función temporal única es:
)2,0(
2,0
2,0
)2,0()0();2,0(
2,0
2,0
)2,0;0( 44444 −
−−
−−∞
−−
Η⋅+Η⋅−Η⋅=Ρ⋅⋅+Ρ⋅= t
t
tt
t
e eev
y su Transformada de Laplace:
ss
e es
ess
V 2,0
2,01
2,0 444 −−
++−=
Para transformar los dos últimos términos se aplicó el Teorema del desplazamiento de la variable t.
Ejemplo
Obtengamos la transformada de Laplace de la función de la figura, cuya descripción por medio de funciones separadas es la siguiente:
( )
>
<<−−
<<⋅
=
30
3135
1010
t
tt
tt
ve
En una sola ecuación:
( ) )3;1()1;0( 3510 Ρ−−Ρ⋅⋅= ttve
Y en función de escalones de Heaviside:
( ) ( )( ) ( ) ( ) )3(
.
)1()1()0()3()1()1()0( 353510103510 −−−−−−−− −+−−⋅⋅−⋅⋅=−−−−⋅= t
diversosdesplaz
ttttttte HtHtHtHtHHtHHtv4444 34444 21
La transformada del primer término (una rampa lineal) es directa:
2
10
s.
El último término es similar al primero, pero desplazado en el tiempo. Determinamos su transformada aplicando el teorema del desplazamiento de la variable t:
ses
⋅−3
2
5
El 2º y 3º término presentan la dificultad de que la rampa tiene distinto desplazamiento que el escalón de Heaviside. Para poder aplicar el teorema del desplazamiento es necesario que ambos factores presenten el mismo desplazamiento de la variable t.
No es difícil manejar algebraicamente estos términos para cumplir esa condición:
2º término: restamos y sumamos 1 a la variable t de la recta y reagrupamos
( ) ( ) )1()1()1()1( 10110111010 −−−− +−=+−=⋅⋅ tttt HHtHtHt
La transformada es: ss es
es
−− +1010
2
3º término: separamos el -3 en -1-2 y reagrupamos
( ) ( ) ( ) )1()1()1()1( 101521535 −−−− −−=−−=− tttt HHtHtHt
La transformada es: ss es
es
−− −105
2
juntando las transformadas de todos los términos:
ev
10
1 3 2 t [seg]
p1=10
p2=-5
p3=0
I II III
FIG.15.10 EJEMPLO DE EXCITACIÓN COMPUESTA

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 52 de 74
sssssss
e es
ess
es
es
es
es
ess
v ⋅−−⋅−−−−− +−=++−−−= 3
222
3
2222
10151010105101010
En el ejemplo anterior encontramos cierta dificultad para hallar la transformada de Laplace, pues aunque el teorema del desplazamiento de la variable t facilita las cosas, es necesario cierto manejo algebraico para poder aplicarlo.
Transformación completa de una función compuesta (Método simplificado)
Este método es aplicable sólo a funciones compuestas por tramos rectos. Esta limitación no menoscaba su utilidad porque gran parte de las funciones tienen esa característica o bien pueden “linealizarse” para simplificar su análisis.
Linealizar una función significa reemplazar sus tramos curvos por rectas. Naturalmente el análisis con la función “linealizada” es menos exacto, pero mucho más simple.
El ejemplo de la figura 15.11 puede ser la fiel representación de un pulso muy breve, donde los tiempos de crecimiento y decrecimiento son apreciables. La linealización no desprecia esos tiempos pero sí las formas curvas.
El método simplificado consiste en encontrar un conjunto de rampas cuya suma de por resultado la función compuesta por tramos rectos. Su principal ventaja es que la transformada de estas rampas se puede obtener en forma directa mediante el teorema del desplazamiento de la variable t .
Recordemos que una rampa es una recta que nace en un punto del eje de absisas (por ejemplo t=a), y vale cero antes del mismo. Su ecuación es:
( ) )()( att Hatkf −−=
y su transformada, considerando el mencionado teorema del desplazamiento:
sa
s es
kF ⋅−=
2)(
En éste método no se presenta el problema del método general, en el que la aplicación del teorema del desplazamiento se complica porque los tramos rectos suelen desdoblarse en términos formados por rectas con un desplazamiento diferente al del escalón que las multiplica.
Desarrollemos el método simplificado sobre el mismo ejemplo anterior para poder establecer comparaciones.
Se basa en un teorema de geometría que establece:
o dadas varias rectas de pendiente 1p , 2p , npL ,
o la suma es una recta de pendiente npppp +++= L21 .
Entonces, en primer lugar determinamos las pendientes de cada tramo. Se indican sobre la representación de la excitación en la Fig. 15.13.
FIG.15.11 CURVA LINEALIZADA
a
FIG.15.12 RAMPA
t
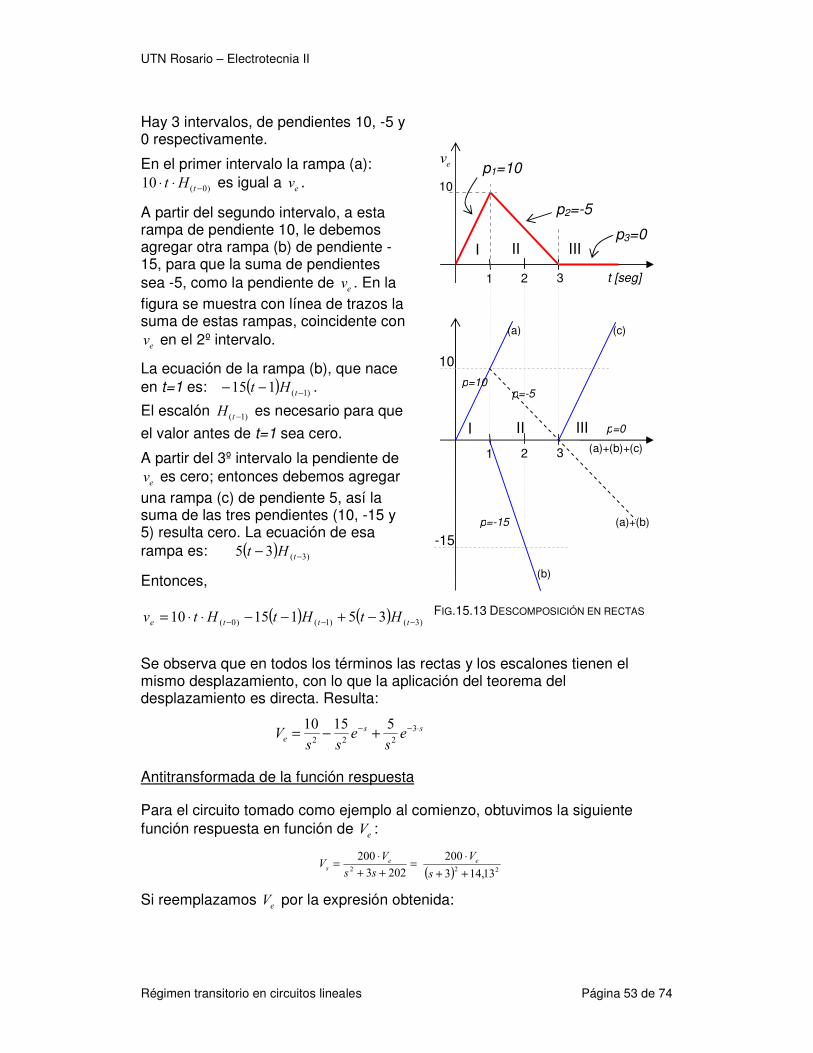
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 53 de 74
Hay 3 intervalos, de pendientes 10, -5 y 0 respectivamente.
En el primer intervalo la rampa (a):
)0(10 −⋅⋅ tHt es igual a ev .
A partir del segundo intervalo, a esta rampa de pendiente 10, le debemos agregar otra rampa (b) de pendiente -15, para que la suma de pendientes sea -5, como la pendiente de ev . En la figura se muestra con línea de trazos la suma de estas rampas, coincidente con
ev en el 2º intervalo.
La ecuación de la rampa (b), que nace en t=1 es: ( ) )1(115 −−− tHt .
El escalón )1( −tH es necesario para que
el valor antes de t=1 sea cero.
A partir del 3º intervalo la pendiente de
ev es cero; entonces debemos agregar una rampa (c) de pendiente 5, así la suma de las tres pendientes (10, -15 y 5) resulta cero. La ecuación de esa rampa es: ( ) )3(35 −− tHt
Entonces,
( ) ( ) )3()1()0( 3511510 −−− −+−−⋅⋅= ttte HtHtHtv
Se observa que en todos los términos las rectas y los escalones tienen el mismo desplazamiento, con lo que la aplicación del teorema del desplazamiento es directa. Resulta:
ss
e es
ess
V ⋅−− +−= 3
222
51510
Antitransformada de la función respuesta
Para el circuito tomado como ejemplo al comienzo, obtuvimos la siguiente función respuesta en función de eV :
( ) 22213,143
200
2023
200
++
⋅=
++
⋅=
s
V
ss
VV ees
Si reemplazamos eV por la expresión obtenida:
p3=0
ev
10
1 3 2 t [seg]
p1=10
p2=-5
I II III
1 3 2
(a) (c)
(b)
(a)+(b)
p=10
p=-15
p=-5
p=0 (a)+(b)+(c)
I II III
10
-15
FIG.15.13 DESCOMPOSICIÓN EN RECTAS

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 54 de 74
( ) ( )
( )[ ] ( )[ ] ( )[ ]222
3
222222
22
3
22222
13,143
1000
13,143
3000
13,143
2000
13,143
20051510
13,143
200
++
⋅+
++
⋅−
++=
=++
+−=
++
⋅=
⋅−−
⋅−−
ss
e
ss
e
ss
se
se
sss
VV
ss
sses
Observando los tres términos vemos que son similares, salvo 2 diferencias:
Están multiplicados por distintas exponenciales
Están multiplicados por constantes diferentes.
Entonces debemos hacer la antitransformada de la función que constituye el primer término excluida la constante 2000 .
A esa función la llamamos )(sF y a su antitransformada )(tf .
La antitransformada del primer término es )0()(2000 −tt Hf .
En base al teorema del desplazamiento, la del segundo es )1()1(3000 −−− tt Hf y la
del tercero )3()3(1000 −− tt Hf
Para antitransformar )(sF
resulta conveniente el método de igualación de numeradores.
Igualamos coeficientes de los términos de igual grado.
En el segundo término le sumamos y restamos 3 a la variable s. De ese modo se desdobla en dos: uno origina un seno y otro un coseno, ambos multiplicados por una exponencial
Multiplicando por las constantes y desplazando la variable t de cada término: ( )
( ) ( ) ( ) ( ) ( )[ ]( ) ( ) ( ) ( ) ( )[ ] )3(
3333
)1(
1313
)0(
33
)(
313,14385,1313,14cos95,4395,40735,0
113,14155,4113,14cos85,14185,14221,0
13,14770,213,14cos9,99,9147,0
−−⋅−−⋅−
−−⋅−−⋅−
−⋅−⋅−
−⋅⋅+−⋅⋅−−⋅+−+
−⋅⋅+−⋅⋅−−⋅+−
⋅⋅+⋅⋅−⋅+−=⇒
t
tt
t
tt
t
tt
ts
Htsenetet
Htsenetet
Htsenetetv
Esta expresión general de )(tsv parece bastante complicada, pero vale desde t=0 hasta
t= ∞ . Podemos expresar la respuesta mediante funciones separadas para cada uno de los intervalos en que hemos dividido la excitación. Estas funciones serán más simples ya que en cada intervalo, los escalones de Heaviside tienen un valor definido: 0 ó 1.
( )[ ]
( )[ ]( ) ( ) ( )
( )[ ]222
221
2
421
3
31
222
2
4
3
322
2
21
2
1
3
1
2
43
2
21
222)(
13,143
20232023
13,143
20232023
202313,143
1
++
+++++++=
=++
+++++++=
=++
++
+=
++=
ss
AsAAsAAAsAA
ss
sAsAAsAsAsAsAsA
ss
AsA
s
AsA
ssF s
( )
( )
⋅−=−=⇒=+
⋅−=−=−−=⇒=++
⋅−=−=⇒=+⇒=+
⋅==⇒=
−
−
−
−
3
331
3
2214421
5
21121
3
22
1095,4202
10)4
1073,4202
1
202
9303)3
1035,7202
30
202
1320203202)2
1095,4202
11202)1
AAA
AAAAAA
AAAA
AA
( )[ ]( )
( )[ ]( )
( )[ ]( )
( )[ ] 13,14
13,14
13,143
1073,431095,4
13,143
31095,41095,41035,7
13,143
1073,4331095,41095,41035,7
13,143
1073,41095,41095,41035,7
22
33
22
3
2
35
22
33
2
35
22
33
2
35
)(
⋅++
⋅+−⋅−+
++
+⋅−+
⋅+
⋅−
=++
⋅+−+⋅−+
⋅+
⋅−=
=++
⋅+⋅−+
⋅+⋅−=
−−−−−
−−−−
−−−−
ss
s
ss
s
s
ss
s
s
s
sF s
tsene
tetf
t
t
t
⋅⋅+
⋅⋅⋅−⋅+⋅−=⇒
⋅−−
⋅−−−−
13,1410385,1
13,14cos1095,41095,41035,7
33
3335
)(

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 55 de 74
FIG.15.14 CIRCUITO EXCITADO CON FUNCION DE TRAMOS RECTOS
Para el intervalo I, sólo 1)0( =−tH , entonces:
tsenetetv tt
ts ⋅⋅+⋅⋅−⋅+−= ⋅−⋅− 13,14770,213,14cos9,99,9147,0 33
)(
En el intervalo II, 1)0( =−tH y 1)1( =−tH
( ) ( ) ( ) ( ) ( )113,14155,4113,14cos85,14185,14221,0
13,14770,213,14cos9,99,9147,0
1313
33
)(
−⋅⋅−−⋅⋅+−⋅−−
+⋅⋅+⋅⋅−⋅+−=⇒
−⋅−−⋅−
⋅−⋅−
tsenetet
tsenetetv
tt
tt
ts
Podemos desdoblar las exponenciales y los senos y cosenos de la suma de dos ángulos.
( ) ( ) ( ) ( )[ ]( ) ( ) ( ) ( )[ ]tsentsenee
sentsenteet
tsenetetv
t
t
tt
ts
⋅⋅−−−⋅⋅⋅−
−⋅⋅−−⋅⋅⋅+−⋅−−
+⋅⋅+⋅⋅−⋅+−=⇒
⋅−
⋅−
⋅−⋅−
13,14cos13,1413,14cos13,14155,4
13,1413,1413,14cos13,14cos85,1485,1485,14221,0
13,14770,213,14cos9,99,9147,0
33
33
33
)(
Para calcular el valor de la respuesta en un instante de tiempo determinado, usando la expresión general, se reemplaza el valor de t en las expresiones multiplicadas por los escalones que valen 1. Por ejemplo para t=2 se debe reemplazar en las dos primeros términos; el tercero es nulo pues 0)3( =−tH .
Ejemplo
Determinar la tensión de salida para el circuito y la excitación mostrados en la figura.
Esa excitación, por su forma se denomina “diente de sierra”. La pendiente del tramo creciente es 103 y del decreciente -5x103. (Notar que los valores del eje están en ms).
Al descomponerla en rampas, la primera tiene pendiente 103 y nace en t=0. La segunda que nace en t= 10 ms debe tener pendiente -6 x103 para que sumada a la pendiente de la primera nos de -5x103, que es la pendiente del segundo tramo.
Finalmente, a partir de 12 ms se debe incorporar una tercer rampa de pendiente 5x103. Así la suma de las pendientes de las tres rampas es 0.
Entones, )012,0(
3
)01,0(
3
)0(
3 )012,0(105)01,0(10610 −−− ⋅−⋅+⋅−⋅−⋅= ttte HtHtHtv
Transformando:
ss
e es
ess
V ⋅−⋅− ⋅+
⋅−= 012,0
2
301,0
2
3
2
3 10510610
Luego, a partir del circuito equivalente de Laplace, obtenemos las tensiones.
En un circuito como este podemos aplicar el concepto de divisor de tensiones:
s⋅1,0
3105⋅
410
+
sV
-
+
eV
-
FIG.15.15 CIRCUITO EQUIV.
Hy1,0
Ωk5
Ωk10
12
10
10 t
[ms]
ev +
sv
-
10
t
[ms]
ev )0(
310 −⋅ tHt
)01,0(
3 )01,0(106 −⋅−⋅− tHt
)012,0(
3 )012,0(105 −⋅−⋅ tHt

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 56 de 74
( )( )
44 344 21VT
eeess
sV
ss
sV
s
sVV
4
4
3
3
3
34
4
1033,3
105
3
2
05,01051,0
1051,0
1051,0
1051,010
10
⋅+
⋅+=
+⋅+⋅
⋅+=
⋅+
⋅⋅+
=
Reemplazamos eV , distribuyendo el producto por la transferencia en cada uno de sus
términos.
( )( )
( )( )
( )( )
ss
s es
s
se
s
s
ss
s
sV ⋅−⋅−
⋅+
⋅++
⋅+
⋅+−
⋅+
⋅+=
⋅⋅ 012,0
4
4
2
301,0
4
4
2
3
4
4
2
3
1033,3
105
3
2
1033,3
105
3
2
1033,3
105
3
2 10510610
Observamos que los tres términos de sV tienen mucho en común. Sólo difieren en la
constante y en la exponencial que los multiplica.
Siendo así, si antitransformamos el primero de ellos, la antitransformada de los otros términos se puede obtener aplicando el teorema del desplazamiento de la variable t y teniendo en cuenta las diferentes constantes (que se conservan durante los procesos de transformación o antitransformación)
Entonces, primero antitransformamos ( )
( )44
2
3
)(1033,3
105
3
2 10
⋅+
⋅+=
s
s
sF s
Una vez hallada esta antitransformada, la del segundo término se obtiene afectándola por un factor -6 y corriendo la variable t en 0,01. Para el tercer término, el factor es 5 y el corrimiento es 0,012.
Excitación compuesta por tramos rectos discontínua
Analizamos este caso especial de función compuesta por tramos rectos para mostrar que no siempre se descompone en un conjunto de rampas. Toda discontinuidad agrega un escalón en la descomposición.
No es suficiente verificar que en cada intervalo la suma de pendientes de las rampas sea igual a la pendiente de la función dada. En el ejemplo de la figura, la suma de las rampas a y b cumple esa condición, pero como se puede ver, no contempla la caída de 5 Voltios que se produce en 1,0=t . Para ello es necesario agregar el escalón )1,0(5 −− tH .
La ecuación de ev es:
( ) )1,0()1,0()0( 51,0150100 −−− ⋅−⋅−⋅−⋅⋅= ttte HHtHtv
y su transformada:
ss
e es
ess
V ⋅−⋅− −−= 1,01,0
22
5150100
10
5
0,2 0,1
ev p1=100
p2=-50
a+b
b
a+b+c c
a
FIG.15.16 EXCITACIÓN COMPUESTA CON
UNA DISCONTINUIDAD

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 57 de 74
Las funciones de excitación discontinuas, introducen la complicación de que además de los términos con 2s en el denominador, originados por las rampas, hay términos con s , producidos por los escalones. Esto se refleja en la función respuesta produciendo dos tipos de términos diferentes que obligan a realizar dos antitransformaciones. Recordemos que cuando hay varios términos del mismo tipo, basta antitransformar uno solo, pues los demás se deducen por aplicación del teorema del desplazamiento.
Restricción para el uso de las funciones transferencias
Para una función excitación dada, la función respuesta es:
)()()( sss TER ⋅=
siendo )(sT la transferencia que las vincula (por ejemplo, si la excitación y la
respuesta son tensiones, será la transferencia de tensiones).
De este modo podemos obtener la función respuesta para diferentes excitaciones sin tener que obtener cada vez la expresión que las vincula, es decir la transferencia, pues esta es única, sea cual sea la excitación.
Sin embargo debemos tener en cuenta que la función transferencia sólo se puede definir para condiciones iniciales nulas, por ende, para un circuito con condiciones iniciales, para cada excitación tendremos que determinar la relación con la respuesta. A continuación se muestran estos conceptos a través de un ejemplo muy sencillo.
Naturalmente en cada caso habrá que hacer la antitransformada de )(sR para
hallar la respuesta temporal )(tr que en general es lo que interesa.
Ejemplo.
El capacitor del circuito de la figura tiene una tensión inicial de 10 V con la polaridad indicada.
Se desea determinar la tensión de salida, cuando se excita con una tensión como la mostrada, utilizando el método de la transformada completa de la excitación. El circuito equivalente es el siguiente:
En el circuito equivalente se pueden reemplazar las dos ramas en paralelo por una equivalente. Si las tensiones e impedancias de cada rama son 1V , 1Z
100
200s
410
s
10
50
104
+s
50
10
+s
FIG.15.18 CIRCUITO EQUIVALENTE
Ω100 Ω200
Fµ100
30V
10ms
FIG.15.16 CIRCUITO CON CONDICIÓN INICIAL.
ev
t
+
sv
-
+
ev
-
+
-
FIG.15.17 CIRCUITO CON CONDICIÓN INICIAL

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 58 de 74
y 2V , 2Z , las de la rama equivalente son: 21
1221
ZZ
ZVZVV
+
+= y
21
21
ZZ
ZZZ
+=
Aplicado a este caso, sV 4
1 10= , sZ 101 = , 02 =V y 2002 =Z
Es así que resulta 50
10
+=s
V y 50
104
+=s
Z
De este modo, queda un circuito de una malla, donde la corriente es:
( )15000100
1050
50
10100
50
10
100 4 +
−+=
++
+−
=+
−=
s
sV
s
sV
Z
VVI e
ee
Podemos calcular la tensión de salida como IVV es ⋅−= 100 ó VZIVs +⋅=
Usamos la primer forma: ( )
150
10
150
100
15000100
1050100
++
+==
+
−+−=
sV
ss
sVVV e
e
es LL
Podemos observar que el primer término depende de eV mientras que el segundo es
independiente. Más aún, podemos comprobar que el factor de eV en el primer
miembro es la transferencia de tensiones.
Por lo tanto, el primer término es la respuesta cuando las condiciones iniciales son nulas, y el segundo es un término que se agrega cuando hay condiciones iniciales no nulas. O sea que depende de las condiciones iniciales.
Podemos hallar sV aplicando el principio de
superposición, considerando por un lado el efecto de eV , lo que genera el 1º término
( )1(
sV ) y por otro lado el de la fuente
correspondiente a la condición inicial, que según veremos, genera el 2º término ( )2(
sV )
Pasivamos eV (en su lugar ponemos un
cortocircuito). Los 2 resistores quedan en paralelo (el valor del paralelo es 200/3),
siendo )2(
sV la caída de tensión sobre ese paralelo; entonces:
100
200 s
410
FIG.15.19 OBTENCIÓN DE LA TRANSFERENCIA DE TENSIONES DEL CIRCUITO
eV sV
50
10
20010
20010
4
4
4
+=
+s
s
s
150
100
15000100
10
50
10100
50
104
4
4
+=
+=
++
+=ss
s
sTv
100
200 s
410
s
10
FIG.15.20 EFECTO DE LA CONDICIÓN INICIAL
I

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 59 de 74
150
10
3
200
3
20010
10
4
)2(
+==
+
=s
s
sV
I
s L
43421
Queda a elección del lector elegir la forma de calcular la respuesta.
Cabe ahora antitransformar la expresión obtenida.
321321
inicialcondladeedependient
e
Tv
ss
Vs
V
.
150
10
150
100
++
+=
La antitransformada del 2º término es inmediata: t
s ev ⋅−⋅=→ 150)2( 10
Para antitransformar el 1º término es necesario determinar eV y luego
reemplazarlo en el 1º término de la respuesta.
Descomponemos ev en rampas,
resultando:
( ) )01,0(
)0(
01,03000
3000
−
−
−−
−⋅⋅=
t
te
Ht
Htv
; y la transformada:
s
e ess
V ⋅−−= 01,0
22
30003000
Luego:
s
F
s essss
V
s
⋅−
+−
+= 01,0
22
)1(
150
103000
150
103000
)(
4434421
Antitransformamos el 1º término; el otro se obtiene aplicando el teorema del desplazamiento.
( )150
150150
150150
1030002
2
3221
2
13
2
21
2 +
++++=
++
+=
+ ss
sAAsAsAsA
s
A
s
AsA
ss
3
4)1(
3
4
150
200)2(200)3(
)3(30000150
)2(0150
)1(0
312
2
21
31
=→−=−=→=→
=
=+
=+
AAA
A
AA
AA
t
ts etfsss
F ⋅−+−⋅=⇒+
+−= 150
)(2)(3
4
3
4200
)150(
1
3
4
3
4200
La tensión de salida se compone de tres términos: los dos primeros son los que dependen de la excitación. El primero es el que hallamos recién, el segundo es similar
30
0,01
300001,0
301 ==p
02 =p
)0(3000 −⋅⋅ tHt
( ) )01,0(01,03000 −−− tHt
30
0,01 t
t
FIG.15.21 DESCOMPOSICIÓN DE eV EN RAMPAS

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 60 de 74
aplicando el desplazamiento a 0,01 y teniendo en cuenta que es negativo. El último término es el hallado al comienzo, dependiente de la condición inicial.
( ) ( ) t
t
tt
s eHetetv⋅−
−−⋅−⋅− ⋅+
+−−⋅−
+−⋅= 150
)01,0(
01,015015010
3
4
3
401,0200
3
4
3
4200
Hay que tener en cuenta que sólo se pueden combinar términos multiplicados por escalones iguales. En este caso podemos combinar el 1º y el 3º, que aunque no se explicite, están multiplicados por )0( −tH . En la siguiente expresión se realizó esa
combinación y además se pone en forma explícita el mencionado escalón.
( ) ( ))01,0(
01,0150
)0(
150
3
4
3
401,0200
3
34
3
4200 −
−⋅−−
⋅−
+−−⋅−
+−⋅= t
t
t
t
s HetHetv
Valores puntuales
Para obtener el valor de la respuesta temporal en un instante cualquiera, por ejemplo t=a , hay que reemplazar ese valor de la variable en los términos multiplicados por escalones que valen 1 cuando t=a.
Supongamos que en el ejemplo anterior, se desea hallar )005,0(sv , deberíamos
reemplazar t=0,005 sólo en el primer término, pues para ese valor de t el escalón 0)01,0( =−tH .
02,5472,0333,11333,113
34
3
4005,0200 005,0150
)005,0( ≅×+−=+−⋅= ⋅−evs
Cuando el valor de t en el que se desea obtener la respuesta, sea t=a, coincide con el inicio de alguno de los escalones, se presenta una indetermimación. El valor del escalón es indeterminado para t=a y vale 0 en t=a- y 1 en t=a+. Entonces tendremos un valor de la respuesta a cada lado del instante t=a. (Un límite por derecha y uno por izquierda)
En el ejemplo anterior, el valor para t=0,01- se calcula reemplazando en el primer término pues el escalón del segundo término aún vale 0.
86,1223,0333,1133,123
34
3
401,0200 01,0150
)01,0(≅×+−=+−⋅= ⋅−
− evs
Para t=0,01+ se incorpora el segundo término.
( ) ( ) 86,13
4
3
401,001,020086,1 01,001,0150
.º1
)01,0(=+−−⋅−= −⋅−
+ evtérm
s
Como el valor del segundo término en t=0,01+ es cero, el valor de la respuesta por derecha es el mismo que por izquierda.
Los límites laterales de un punto pueden ser iguales o distintos, según la función sea continua o discontinua en ese punto.
Expresión en cada intervalo
La expresión del resultado obtenido por el método de la transformación completa de la excitación no resulta demasiado evidente.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 61 de 74
Podemos extraer de dicha expresión, una más simple para cada intervalo que compone la excitación.
Para ello, sólo hay que asignar a los escalones, el valor, cero o uno, que tienen en cada intervalo, y luego operar. Veámoslo sobre el ejemplo anterior.
Intervalo [0; 0,01)
En este intervalo 1)0( =−tH y 0)01,0( =−tH
Entonces, t
s etv ⋅−+−⋅= 150
3
34
3
4200
Intervalo (0,01; ∞)
En este intervalo 1)0( =−tH y 1)01,0( =−tH
Entonces: ( ) ( )01,0150150
3
4
3
401,0200
3
34
3
4200 −⋅−⋅− −+−⋅−+−⋅= tt
s etetv
tt
s eeev ⋅−⋅− ⋅+−=−⋅+= 1505,1150 1098,33
4102
Las funciones obtenidas para cada intervalo están referidas al origen de la excitación. Para referirlas al origen del respectivo intervalo, hay que sumar a la variable el inicio del intervalo. Para el segundo intervalo del ejemplo:
Intervalo (0,01; ∞) Se suma 0,01 a t.
5,15,11505,1)01,0(150
3
4102
3
4102 eeeeev tt
s −+⋅+=−⋅+= −⋅−+⋅−
16 Excitación con funciones compuestas periódicas
16.1 Consideraciones generales Las funciones periódicas son las que repiten sus valores a intervalos constantes, llamados período de la función.
Hay dos tipos de funciones periódicas:
o las que se definen mediante una función matemática simple, como las denominadas armónicas (seno y coseno)
o las que están formadas por la repetición periódica de una función compuesta, como las presentadas en el punto 14.
Aquí abordamos el manejo de las funciones compuestas periódicas.
Cuando la excitación de un circuito es una función periódica, la respuesta del mismo va cambiando en los distintos períodos de la excitación. Esto se debe a que van cambiando las condiciones al inicio de cada período. No obstante, después de un cierto tiempo, la respuesta comienza a ser prácticamente igual para cada período, alcanzándose un régimen permanente periódico.
En la Fig.16.1 se muestra como ejemplo la evolución de la tensión del capacitor de una malla R-C excitada con pulsos que se repiten periódicamente (“tren de

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 62 de 74
pulsos”). El capacitor comienza descargado. Cada período de esta excitación tiene una parte activa (tensión no nula) en la que el capacitor recibe energía, y una parte pasiva (tensión nula) donde la pierde en parte (no toda, pues los procesos de descarga son asintóticos).
Al perder menos energía que la recibida, el capacitor va alcanzando en cada ciclo mayor tensión. Pero como a mayor tensión corresponde mayor pérdida de energía en la descarga, la diferencia entre energía recibida y perdida se va reduciendo, tendiendo a cero.
Finalmente se llega al régimen permanente periódico en el cual los
valores máximos y mínimos de tensión en el capacitor se repiten en cada período.
En un análisis completo de un circuito con excitación periódica compuesta, se obtiene la respuesta desde t=0 hasta ∞→t ; sin embargo a veces interesa hallar solamente el régimen periódico permanente, es decir la respuesta cuando ∞→t .
16.2 Obtención de la respuesta
Definición matemática
Las funciones periódicas son las que repiten sus valores a intervalos constantes.
Matemáticamente decimos que una función es periódica si existe una constante T, real y mayor que cero, tal que
tff Ttt ∀= + )()( [16.1]
El menor valor de T que cumple esa condición se denomina período de la función. Nótese que todos sus múltiplos también la cumplen.
Transformada de la función periódica
Consideremos una función periódica de período T, como la mostrada en la Fig. 16.2 y llamemos )(0 tf a la función del primer período.
En los demás períodos la función se repite desplazada en T, 2T, 3T, etc.
T 2T 3T
T
)(tf
)(0 tf
t
FIG.16.2 FUNCIÓN PERIÓDICA
)(tev
)(tCv
FIG.16.1 CIRCUITO R-C EXCITADO CON TREN DE PULSOS
t

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 63 de 74
Entonces: LL ++++= −− )(0)(0)(0)( iTtTttt ffff [16.2]
Siendo )(0 sF la transformada de )(0 tf , la transformada de )(tf resulta:
LL ++++= −− iTs
s
Ts
sss eFeFFF )(0)(0)(0)( [16.3]
Teniendo en cuenta que Ts
i
iTsiTsTs
eeee
−
∞
=
−−−
−==++++ ∑1
11
0
LL
Resulta: Ts
s
i
iTs
sse
FeFF
−
∞
=
−
−== ∑1
)(0
0
)(0)( [16.4]
Si bien la forma matemática de [16.4] es más elegante, no debe descartarse utilizar las forma [16.3], que suele ser más eficaz.
Ejemplo
La función periódica de la figura 16.3, repite en cada período un tramo de rampa. Se la llama “diente de sierra ideal”. El nombre diente de sierra obedece a su forma, e ideal, a que el tiempo de decrecimiento entre uno y otro ciclo es nulo. La función del tiempo que describe la rampa del 1º período es:
[ ])()0();0()(0 TttTt HtHtT
Vt
T
Vf −− ⋅−⋅=Ρ⋅=
Hemos usado el método general, que multiplica por un pulso para anular los valores fuera del intervalo (0; T). Se observa que hay un término donde la función t y el escalón tienen desplazamientos diferentes. Entonces, sumamos y restamos T para uniformarlos:
( )[ ])()()0()(0 TtTttt HTHTtHtT
Vf −−− ⋅−⋅−−⋅=
Y transformamos utilizando el Teorema del desplazamiento de la variable t.:
( )s
eV
sT
eVe
s
Te
ssT
VF
TsTsTsTs
s
−−−− ⋅
−⋅
−=
−−=
222)(0
111
Aplicando [16.4] obtenemos la transformada de la función periódica:
( )
−−=
−
−
Ts
Ts
ses
e
TsVF
1
12)(
La Tabla 3 del Anexo B contiene las transformadas de Laplace de las funciones compuestas periódicas más comunes. De todas maneras, haremos un ejemplo más.
Ejemplo.
Consideremos el “diente de sierra real” de la figura. A este lo llamamos real porque contempla un tiempo de decrecimiento apreciable.
T 2T 3T
t
)(tf
V
FIG. 16.2 DIENTE DE SIERRA IDEAL FIG.16.3 DIENTE DE SIERRA IDEAL

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 64 de 74
Para hallar la función en el primer período, podemos aplicar el método simplificado, válido para funciones compuestas por tramos rectos.
)3()2()0()(0 )3(10)2(155 −−− −+−−⋅⋅= tttt HtHtHtf
Su transformada es:
ss
s es
ess
F ⋅−⋅− +−= 3
2
2
22)(0
10155
Y la de la función periódica:
( )( )L+++
⋅+⋅−
−
⋅+⋅−= ⋅−⋅−
⋅−⋅−
⋅−
⋅−⋅−ss
ss
s
ss
s ees
eeó
es
eeF
63
2
32
32
32
)( 110155
1
10155
Como vimos, no resulta demasiado complicado obtener la transformada de Laplace de una excitación periódica. Sin embargo, ello no es un fin en si mismo, sino solamente uno de los pasos necesarios para determinar la respuesta temporal de un circuito al que se aplica tal excitación.
Formalmente, el análisis de un circuito con excitación periódica comprende los siguientes pasos:
o Obtención de la función excitación transformando la excitación temporal.
o Hallar la transferencia apropiada para vincular la excitación con la respuesta deseada.
o Hallar la función respuesta como producto de la función excitación por la transferencia.
o Hallar la respuesta temporal antitransformando la función respuesta.
Cumplido el último paso, nos encontraremos con una función del tiempo de infinitos términos, difícil de interpretar y manejar, que representa la respuesta desde 0=t a ∞=t . Hay dos resultados e interés:
o El valor de la respuesta en cierto instante de tiempo, por ejemplo t=a. Sólo es cuestión de reemplazar el valor de la variable t, teniendo en cuenta que los escalones valen 0 para t < a y 1 para t > a.
o El régimen permanente periódico. Se asume que se alcanza después de transcurridos n períodos, teóricamente con ∞→n . Por lo tanto hay que hallar la expresión para
∞→n . Además, como en general se desea obtener la expresión de la respuesta temporal referida al inicio del período n-simo, habrá que desplazar el eje de ordenadas sumando nT a la variable.
Ejemplo
Supongamos que un circuito R-C se excita con un diente de sierra ideal como el de la figura 16.2, de amplitud igual a 10V y periodo T=0,2s. Hallemos la tensión en el capacitor para Ω=1000R y FC µ100=
La función excitación, considerando hasta un período n, es:
2 3
t
)(tf
10
FIG. 16.4 DIENTE DE SIERRA

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 65 de 74
( )44444 344444 21
L
44444 344444 21 nelhastaeldesdeperíodos
snss
Período
ss
seeeee
se
ssV
0
2,04,02,0
º1
2,02,0
22)(1
2,01150
⋅⋅−⋅−⋅−−− ++++
−−=
Multipliquemos los paréntesis. Nótese que debido a que los dos términos cuadráticos del primer paréntesis tienen signos contrarios, al multiplicarlos por la serie de exponenciales del segundo paréntesis, se cancelan casi todos los términos salvo los dos extremos.
snsssn
se es
es
es
ess
V )1(2,04,02,0)1(2,0
22)(
1010105050 +−⋅−⋅−+− −−−−−= L
La transferencia es:
10
10
1010
10
43
4
)(+
=
+
==s
s
sV
VT
C
esv
Y la función respuesta:
( ) ( ) ( ) ( ) ( )snss
G
sn
F
sC ess
ess
ess
essss
V )1(2,04,02,0)1(2,0
22)(10
100
10
100
10
100
10
500
10
500 +−⋅−⋅−+−
+−−
+−
+−
+−
+= L
4342143421
Para antitransformar esta expresión debemos antitransformar previamente los términos indicados F y G, y luego aplicar el teorema del desplazamiento.
( ) ( )
=−=⇒=+
−=−
=⇒=+
=⇒=
⇒+
++++=
++
+=
+=
50
510
010
5050010
10
1010
1010
500
1331
2112
22
2
2
3212
2
13
2
21
2
AAAA
AAAA
AA
ss
sAAsAsAsA
s
A
s
AsA
ssF
t
t etfs
A
s
A
s
AF ⋅−+−⋅=⇒
+++= 10
)(31
2
2 555010
( )t
t egssss
G ⋅−−=⇒+
−+=
+= 10
)( 101010
1010
10
100
Luego:
[ ] ( ) ( )[ ] ( )
[ ] [ ] ( )[ ] ( ))1(2,0
)1(2,010
)4,0(
)4,0(10
)2,0(
)2,0(10
)1(2,0
)1(2,010
)0(
10
)(
101010101010
55)1(2,0505550
+−+−−
−−−
−−−
+−
+−−
−
⋅−
−−−−−−−
−+−+−⋅−+−⋅=
nt
nt
t
t
t
t
nt
nt
t
t
tC
HeHeHe
HentHetv
LL
Si queremos calcular el valor de la tensión para un instante cualquiera, tenemos que determinar qué escalones valen 1 y cuales valen cero. Luego reemplazamos el valor de t. Por ejemplo, para t=0,5:
[ ] [ ] [ ]21,4101010105525
10101010555,050
135
)4,05,0(10)2,05,0(105,010
)5,0(
≅+−+−+−=
=−−−−+−⋅=
−−−
−−−−⋅−
eee
eeevC
Para hallar la respuesta en el período n, vemos que todos los escalones valen 1, excepto los que comienzan en t-0,2(n+1), que corresponden al período siguiente. Entonces:
)2,0(1010
2
)2,0(101010
1
0
))1(2,0(1010
)(
57,111057,16551
1010555
10105550
nttntt
t
n
i
itt
tC
enete
eenet
enetv
⋅−−⋅−
−
⋅−−⋅−⋅−
−
=
+−−⋅−
⋅+⋅−⋅−−⋅=−
−+⋅−+−⋅=
=⋅+⋅−+−⋅= ∑
Para referir el resultado al comienzo del período n, se debe sumar nT (en éste caso 0,2n) a la variable t.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 66 de 74
( ) ( ) ( ) tnttnt
C eetenentv ⋅−+−⋅−+− ⋅+⋅−−⋅=⋅+⋅−⋅−−+= 102,010102,010 57,1157,165557,111057,1652,05
El régimen periódico permanente se alcanza para un valor grande de n. En tal caso, la expresión anterior se reduce a la siguiente:
t
tC etv ⋅−⋅+−⋅= 10
)( 57,1155
Una forma de comprobar la ecuación obtenida, es controlar que el valor de la tensión del capacitor, de acuerdo con las leyes de la conmutación, sea el mismo al inicio y al final de un período. Aquí:
57,6)02,0()0( ≅= CC vv
La figura 16.5 muestra la respuesta periódica permanente comparada con la excitación.
Ejemplo
Analicemos ahora el mismo circuito R-C del ejemplo anterior cuando se aplica un tren de pulsos como el de la figura. Los pulsos tienen una duración T1= 60ms y su período es de T=100ms.
La transferencia era:
10
10)(
+==sV
VT
C
esv
La función del tiempo del 1º período de la excitación es:
)06,0()0(0 1010 −− −= tte HHv
y su transformada:
s
e ess
V ⋅−−= 06,0
0
1010
La de la excitación periódica es:
( )44444444 344444444 21
LL
∑
⋅⋅−⋅⋅−−−⋅−
=
⋅⋅−
++++++
−=
n
i
sie
snsisss
e eeeeess
V
0
1,0
1,01,02,01,006,0 11010
y la de la respuesta:
( ) ( ) ∑=
⋅⋅−⋅−
+−
+=
n
i
sis
F
C eessss
V0
1,006,0
10
100
10
100
43421
1T 2T
T
t
FIG.16.6 TREN DE PULSOS
10
FIG. 16.5 RESPUESTA PERIÓDICA PERMANENTE.
0,02

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 67 de 74
Hallemos la antitransformada de F:
( )
tefssss
F ⋅−⋅−=⇒+
−=+
= 10101010
1010
10
100
Luego,
( ) ( ) ( ) ( )∑∑=
⋅−−⋅−−⋅−
=⋅−
⋅−⋅− ⋅−−⋅−=n
i
it
itn
i
it
it
C HeHev0
1,006,0
)1,006,0(10
0
1,0
)1,0(1010101010
Con esta expresión podemos determinar fácilmente el valor de la respuesta en un determinado instante.
Para hallar el régimen permanente periódico, tenemos que considerar que en este ejemplo, cada período consta de dos intervalos diferentes, en correspondencia con la excitación. Por lo tanto, tenemos que determinar dos ecuaciones, una para cada uno de esos intervalos.
Para un período n-simo, el primer intervalo comienza en nnTt .1,0== y termina en
06,01,006,0 +⋅=+= nnTt , donde comienza el segundo. Como el escalón
( )ntH ⋅−− 1,006,0 correspondiente al término n de la segunda sumatoria, toma valor 1al
comenzar el segundo intervalo, no debemos considerarlo para hallar la ecuación del 1º intervalo y sí para la del 2º.
1º intervalo:
( ) ( ) ( ) ( )∑∑−
=⋅−−
⋅−−⋅−
=⋅−
⋅−⋅− ⋅−−⋅−=1
0
1,006,0
)1,006,0(10
0
1,0
)1,0(1010101010
n
i
it
itn
i
it
it
C HeHev
Resolvemos las sumatorias:
( )[ ] ( ) [ ]
e
een
e
eenv
nttntt
C−
−+−−
−
−−⋅=
⋅−−⋅−−−+−⋅−⋅−
1)1(10
11010
1,006,01006,01011,01010
Luego, llevamos el eje de ordenadas al comienzo del período n, es decir, sumamos nT=0,1.n a la variable t.
( ) ( ) ( ) ( )
111010
06,01006,01,0101,0101,010
−
−−
−
−+=
−−−⋅+−−−⋅+−
e
ee
e
eev
tnttnt
C
Como el régimen permanente periódico se alcanza para n muy grande, entonces despreciamos las exponenciales negativas que tienen n en el exponente.
( ) ( )( ) tttt
C eee
eeee
ev ⋅−⋅−−−−− ⋅−=
−
−−=−
−−= 1010
6,006,0101,010 22,510
11010
1
1010
2º intervalo:
En este intervalo, hay que incluir el término n de la segunda sumatoria: ( ))1,006,0(101010 nte ⋅−−⋅−⋅−−
Por lo tanto, podemos obtener la respuesta en el segundo intervalo agregándolo al resultado obtenido para el primer intervalo. Pero antes debemos referirlo al inicio del período n, como lo está la expresión del primer intervalo. De tal manera, el término a sumar es: ( ))06,0(101010 −⋅−⋅−− te
Entonces,
( ) tttt
C eeeeev ⋅−⋅−−⋅−⋅− ⋅≅⋅+−=⋅+−⋅−= 10106,0)06,0(1010 131022,5101022,510

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 68 de 74
Si queremos referir esta ecuación al inicio del segundo intervalo del período n, hay que correr el eje de ordenadas 0,06
( ) tt
C eev 1006,010 14,713 −+− ⋅=⋅=
En la figura se representa la respuesta periódica permanente del tren de pulsos en base a las ecuaciones obtenidas..
FIG. 16.7 RESPUESTA PERMANENTE DEL TREN DE PULSOS
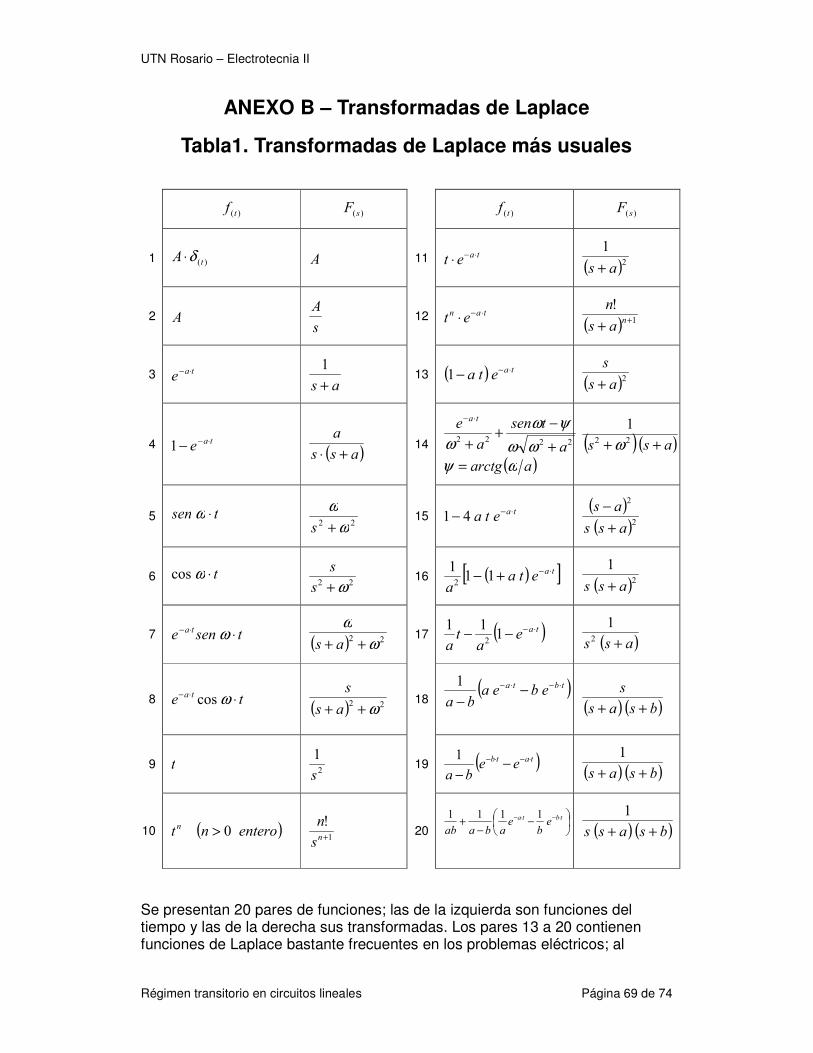
UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 69 de 74
ANEXO B – Transformadas de Laplace
Tabla1. Transformadas de Laplace más usuales
)(tf )(sF
)(tf )(sF
1 )(tA δ⋅ A 11 taet ⋅−⋅ ( )21
as +
2 A s
A 12 tan et ⋅−⋅ ( ) 1
!+
+n
as
n
3 tae ⋅− as +
1 13 ( ) taeta ⋅−−1
( )2as
s
+
4 tae ⋅−−1 ( )ass
a
+⋅ 14 2222
a
tsen
a
e ta
+
−+
+
⋅−
ωω
ψω
ω
( )aarctg ωψ = ( )( )ass ++ 22
1
ω
5 tsen ⋅ω 22 ω
ω
+s 15 taeta ⋅−− 41
( )( )2
2
ass
as
+
−
6 t⋅ωcos 22 ω+s
s 16 ( )[ ]taeta
a
⋅−+− 1112
( )21
ass +
7 tsene ta ⋅⋅− ω ( ) 22
ω
ω
++ as 17 ( )tae
at
a
⋅−−− 1112
( )ass +2
1
8 te ta ⋅⋅− ωcos ( ) 22
ω++ as
s 18
( )tbta ebeaba
⋅−⋅− −−
1
( ) ( )bsas
s
++
9 t 2
1
s 19 ( )tatb
eeba
⋅−⋅− −−
1 ( ) ( )bsas ++
1
10 ( )enteront n 0> 1
!+ns
n 20
−
−+ ⋅−⋅− tbta
eb
eabaab
1111
( ) ( )bsass ++
1
Se presentan 20 pares de funciones; las de la izquierda son funciones del tiempo y las de la derecha sus transformadas. Los pares 13 a 20 contienen funciones de Laplace bastante frecuentes en los problemas eléctricos; al

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 70 de 74
incluirlas aquí se evita tener que realizar su descomposición en fracciones simples como paso previo a la transformación inversa.

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 71 de 74
Tabla 2. Propiedades de la transformada de Laplace
)(tf )(sF Nombre
1 )()( tt gBfA ⋅+⋅ )()( ss GBFA ⋅+⋅ Linealidad
2 ta
t ef ⋅−⋅)( )( asF + Desplazamiento de s
3 )()( atat Hf −− ⋅ sa
s eF ⋅−⋅)( Desplazamiento de t
4
dt
fd t )( )0()( fFs s − Derivada respecto a t
5 n
t
n
dt
fd )( 1
)0()0(
1
)(
−− −−−nn
s
n ffsFs L Derivada n-sima respecto a s
6 ∫t
t dtf0
)( )(
1sF
s
Integral en t
7 ( )( )
dufn
utdtf u
t t n
t )(
0 0
1
)(!1∫ ∫ ∫ −
−=
−
L )(
1sn
Fs
N-integral en t
8 )(tft ⋅−
ds
Fd s)( Derivada respecto a s
9 ( ) )(1 t
nnft−
n
s
n
ds
Fd )( Derivada n-sima respecto a s
10 )(
1tf
t ∫
∞
s
s dsF )( Integral en s
11 ∫ −⋅t
utu dugf0
)()( )()( ss GF ⋅ Convolución

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 72 de 74
Tabla 3. Transformadas de funciones periódicas
)(tf )(sF
1
sT
tghs
e
e
s sT
sT
4
1
1
11
2
2
⋅=
+
−⋅
−
−
2
sT
es
21
11
−
+
⋅
3
Ts
kTs
e
e
s −
−
−
−⋅1
11
4
Tses −−⋅1
11
5
sT
tghTs
e
e
Ts sT
sT
4
2
1
122
2
2
2⋅=
+
−⋅
−
−
1
Onda triangular
t 2T T T/2
∞ Tren de impulsos
t 2T T
∞ ∞
área 1
1
Tren de pulsos. Ciclo activo 50%
t 2T T T/2
1 Onda cuadrada
t 2T T
1
Tren de pulsos. Ciclo activo %100T
k
t 2T T kT
T
Si k=1, la función es )(tH

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 73 de 74
)(tf )(sF
6
7
( )Ts
Ts
es
e
Ts −
−
+−
1
22
8
0
1
( )
( )[ ]
( )( )
sghsT
T
esT
eT
sT
sT
4cot
2
2
12
12
222
2222
2
π
π
π
π
π
+
=
−+
+
−
−
0
1
( )
( )[ ]
−+
− sT
esT
T
222212
2
π
π
1
Diente de sierra. Caída instantánea
t 2T T
1 Diente de sierra
t 2T T kT
T T/2 tT
0
1
T T/2 tT
0
1

UTN Rosario – Electrotecnia II
Régimen transitorio en circuitos lineales Página 74 de 74