conceptos básicos de dinámica
TRANSCRIPT

CONCEPTOS BÁSICOS DE DINÁMICA
ING. JORGE LUIS PAREDES ESTACIO
CURSO: INGENIERÍA SÍSMICA
UNIVERSIDAD PRIVADA ANTENOR ORREGOFACULTA DE INGENIERIAESCUELA PROFESIONAL DE INGENIERIA CIVIL

INTRODUCCIÓNEstudio de los cuerpos o conjunto de partículas en
movimiento.Se divide en dos campos la cinemática y la cinética.Cuando un cuerpo se desplaza de una posición de
equilibrio estable, el cuerpo tiende a volver a esta posición al verse afectado por la acción de las fuerzas que tienden a reestablecer la situación de equilibrio. Estas oscilaciones se denominan VIBRACIONES MECÁNICAS.
Si el cuerpo se considera como una unidad y se desprecian las deformaciones relativas en sus diferentes partes se aplica los principios de la DINÁMICA DE CUERPOS RÍGIDOS.

INTRODUCCIÓNCuando se quieren tener en cuenta los
desplazamientos relativos entre las diferentes partes del cuerpo de aplican los principios de la DINÁMICA DE CUERPOS FLEXIBLES.
La DINÁMICA ESTRUCTURAL estudia las vibraciones de cuerpos flexibles, aunque en muchos casos las deformaciones relativas entre algunas partes de la estructura son de un orden de magnitud tan pequeño, que pueden aplicarse los principios de la dinámica de cuerpos rígidos en algunas porciones de la estructura.
La Dinámica estructura se ha desarrollado ampliamente a partir de la aparición del computador digital. Sus fundamentos se remontan más de dos siglos y medio atrás, pero su enfoque moderno proviene de las últimas cuatro décadas.

Leyes de NewtonNewton maduró las ideas de Galileo y sus
tres conclusiones son el fundamento de la Estática y la Dinámica tanto en cuerpos rígidos como en cuerpos flexibles.
PRIMERA LEY DE NEWTONSEGUNDA LEY DE NEWTONTERCERA LEY DE NEWTONEstas tres leyes son las bases sobre las cuales
se desarrolla la dinámica de cuerpos rígidos y la dinámica estructural.

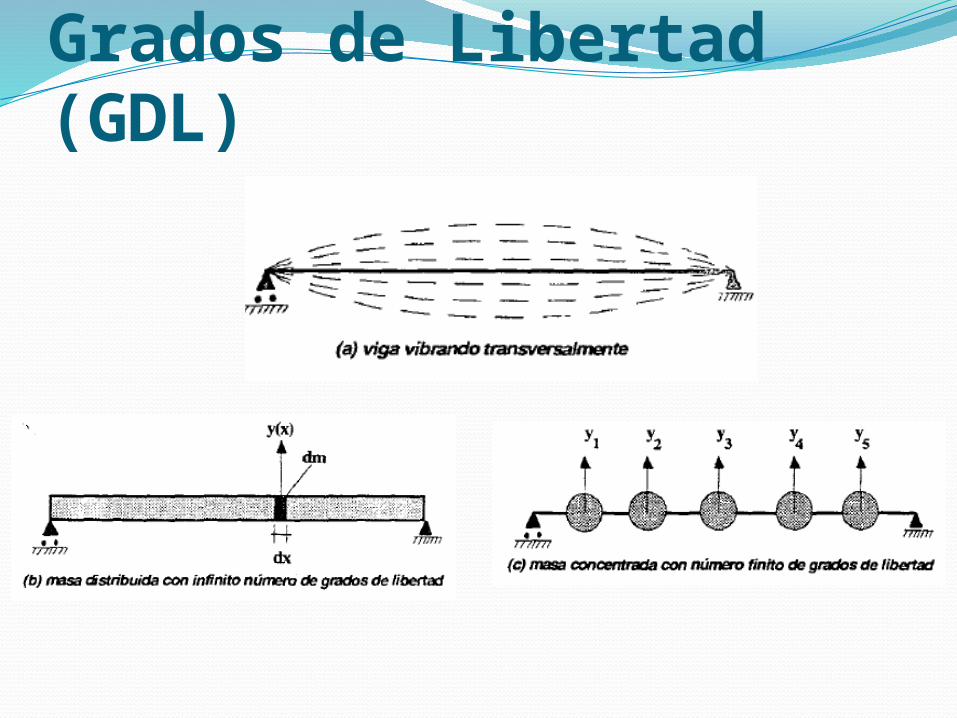
Grados de Libertad (GDL)La cantidad de GDL corresponde al número mínimo de
coordenadas necesarias para delimitar la posición en el espacio y en el tiempo de todas las partículas necesarias de masa del sistema.
Para Cuerpos rígidos, los cuales no describen desplazamiento relativos entre partículas de masa, las propiedades de masa se pueden describir referidas a su centro de masa. Esto conduce a lo que se conoce como sistemas de masa concentrada.
Cuando la masa hace parte de un elemento flexible tenemos un sistema de masa distribuida y por consiguiente se puede hablar de un número infinito de grados de libertad
Grados de Libertad (GDL)

RigidezTodo cuerpo elástico que sea sometido a fuerzas
externas, ya sean estáticas o dinámicas, sufre una deformación.
La rigidez es la relación entres estas fuerzas externas y las deformaciones que ellas inducen en el cuerpo.
El caso más simple corresponde a un resorte helicoidal

RigidezLa rigidez se expresa matemáticamente del siguiente
modo:
El mismo concepto se puede aplicar a cuerpos elásticos que tienen otras formas. Por ejemplo la deflexión cuando se aplica una fuerza en la punta de una viga en voladizo se determina así:

Rigidez

RigidezK=48EI
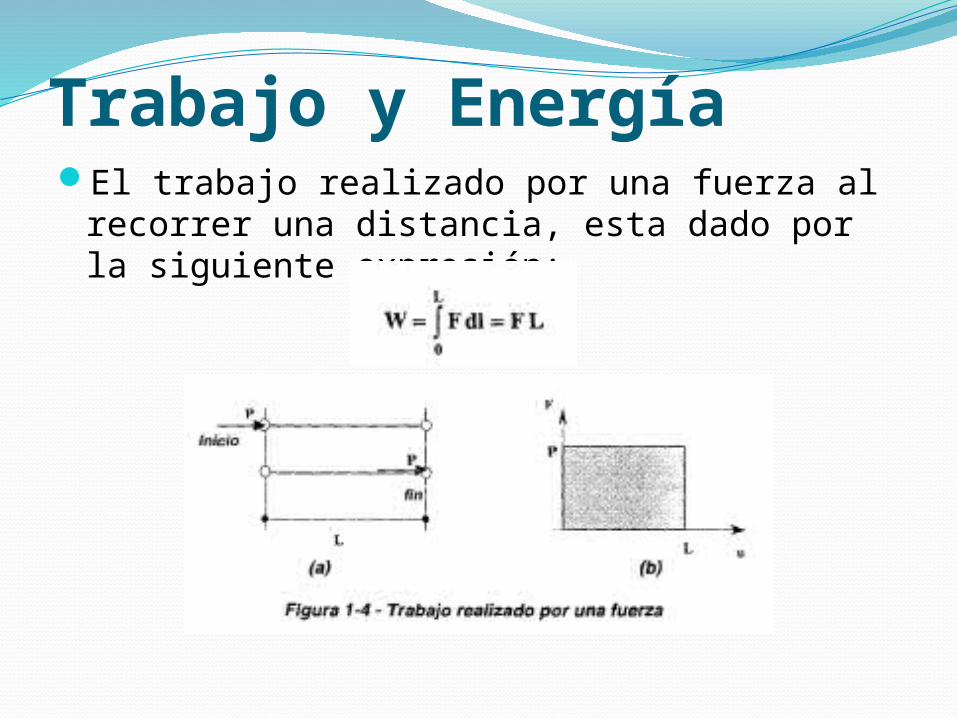
Trabajo y EnergíaEl trabajo realizado por una fuerza al
recorrer una distancia, esta dado por la siguiente expresión:

Trabajo y EnergíaEn el caso de una fuerza que se aplica en el
extremo de un resorte:

Trabajo y EnergíaCuando una masa m se encuentra en movimiento,
la energía cinética que lleva la masa es:
En todo sistema conservativo la energía total que resulta de la suma de la energía cinética y potencial es igual a una constante.
Y la derivada contra el tiempo de la energía es:Ec+Ep=Cte
(Ec+Ep)=0
AmortiguamientoTodo cuerpo en movimiento tiende a
disminuir con el tiempo y esta asociado a la pérdida de energía presente en el sistema.
Esta pérdida de energía es producida por fuerzas de amortiguamiento o de fricción que obran sobre el sistema.
La energía, ya sea cinética o potencial, se transforma en otras formas de energías tales como el calor o ruido.

AmortiguamientoLas formas más utilizadas para describir los
fenómenos de amortiguamiento son:
- Amortiguamiento Viscoso- Amortiguamiento de Coulomb- Amortiguamiento Histerético

Amortiguamiento ViscosoUn cuerpo que se encuentra en movimiento dentro de
un fluido tiende a perder energía cinética debido a su viscosidad que se opone al movimiento. Esta pérdida de energía es directamente asociada a la velocidad del movimiento.

Amortiguamiento de CoulombEste amortiguamiento corresponde al fenómeno
físico de fricción entre superficies secas.
Esta fuerza se opone al movimiento, por lo que tiene signo contrario al de la velocidad
Su tratamiento matemático no puede realizarse por medio de funciones continuas ya que dependen de la velocidad

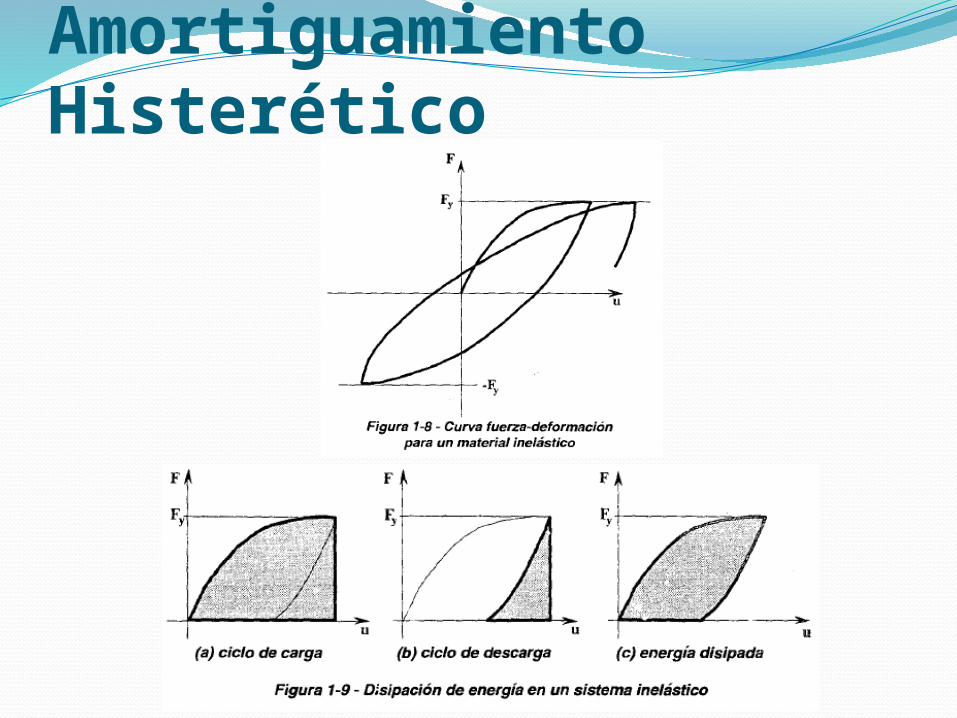
Amortiguamiento HisteréticoEste tipo de amortiguamiento se presenta
cuando un elemento estructural es sometido a inversiones en el sentido de la carga aplicada cuando el material del elemento se encuentra en rango inelástico o no lineal.
El hecho de que la curva de carga tenga una trayectoria diferente a la curva de descarga conduce a que no toda la energía de deformación acumulada en el elemento se convierta en energía cinética en el ciclo de descarga.
Dependiendo del tipo de material la forma tanto de la curva de carga como la de descarga varía.
Amortiguamiento Histerético

Tipos de Excitación dinámica
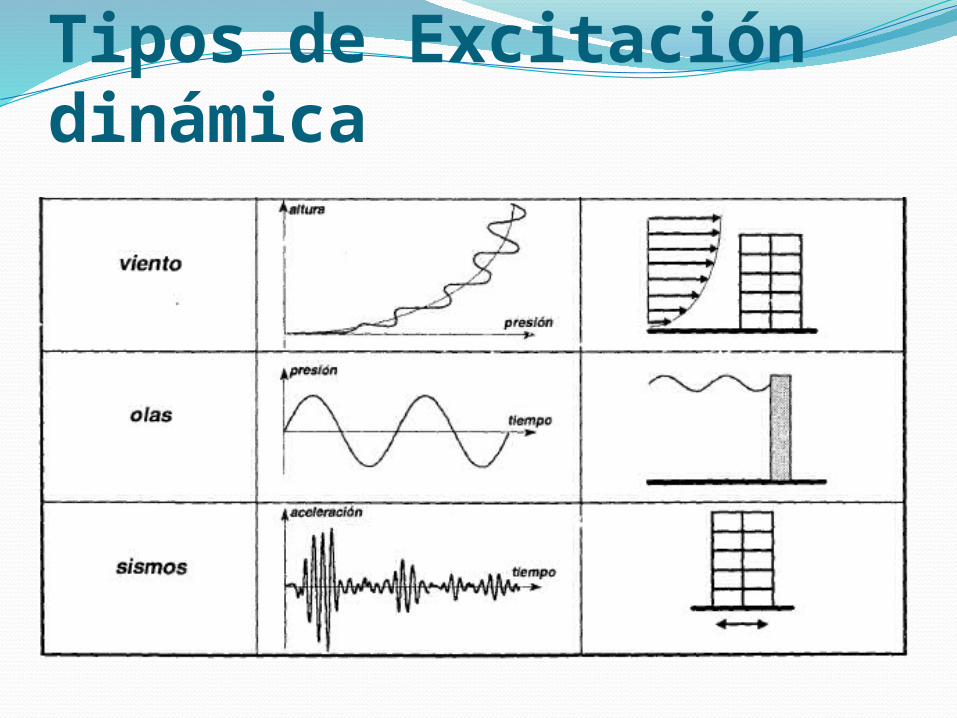
Tipos de Excitación dinámica