cinematica
DESCRIPTION
teoria de cionematicaTRANSCRIPT

1
CinemáticaLa cinemática es la parte de la mecánica que describe el movimiento de los cuerpos sin tener en cuenta las causas que los producen.

2
Z
X
Y
r
x
y
z
ij
k
kjir zyx ++=
O
Vector posición
( )mmetrordeISUnidad ≡..
Para estudiar el movimiento de una partícula necesitamos conocer su posición. Pero esta posición debe estar referida a un sistema de referencia, que en nuestro caso será el sistema cartesiano. La posición de un punto cualquiera, en la figura el punto P, estará caracterizada por el vector posición.
P.

3
Velocidad
tm ∆∆
=rv
tzv
tyv
txv zmymxm ∆
∆=
∆∆
=∆∆
= ,,, ,,
kjikjidtdz
dtdy
dtdxvvv zyx ++=++
X
Z
Yr1
r2
P1(t1)
P2(t2)∆s
∆r
∆r = r2 –r1 (Vector desplazamiento)∆s (Trayectoria)
Velocidad media entre P1 y P2:
(∆t = t2 –t1)
tzyxvvv zmymxm ∆
∆+∆+∆=++
kjikji ,,,
Es decir,
O bien,
X
Z
Yr1
P1
P2∆r’
P’2P’’2∆r
∆r’’dr
dtd
tlímt
rrv =∆∆
=→∆ 0
Velocidad instantánea en P1:
Es decir,
Módulo = 222zyx vvv ++
O
O
≡sm
segundometrovdeISUnidad ..

4
Aceleración
tm ∆∆
=va
tva
tv
atva z
zmy
ymx
xm ∆∆
=∆
∆=
∆∆
= ,,, ,,
kjikjidtdv
dtdv
dtdvaaa zyx
zyx ++=++
Aceleración media entre P1 y P2:
tvvv
aaa zyxzmymxm ∆
∆+∆+∆=++
kjikji ,,,
Es decir,
O bien,
dtd
tlímt
vva =∆∆
=→∆ 0
Aceleración instantánea en P1:
es decir,
Módulo = 222zyx aaa ++
X
Z
Y
P1
P2v1
v2
∆v
O
2
2
dtd
dtddtd
rarv
va=⇒
=
=o bien, 2
2
2
2
2
2
,,dtzda
dtyda
dtxda zyx ===
≡ 22..sm
segundometroadeISUnidad

5
Relación entre la velocidad y la posición
=
=
dtddtd
rv
va
dtd
dtd ravv =⇒ ∫∫ =⇒
f
i
f
i
ddr
r
v
v
ravv
Integrando, ∫+=f
i
dvv if
r
r
ra222
Caso particular: aceleración constante
∫+=f
i
dvv if
r
r
ra222 ra ∆⋅=−⇒ 222if vv
6
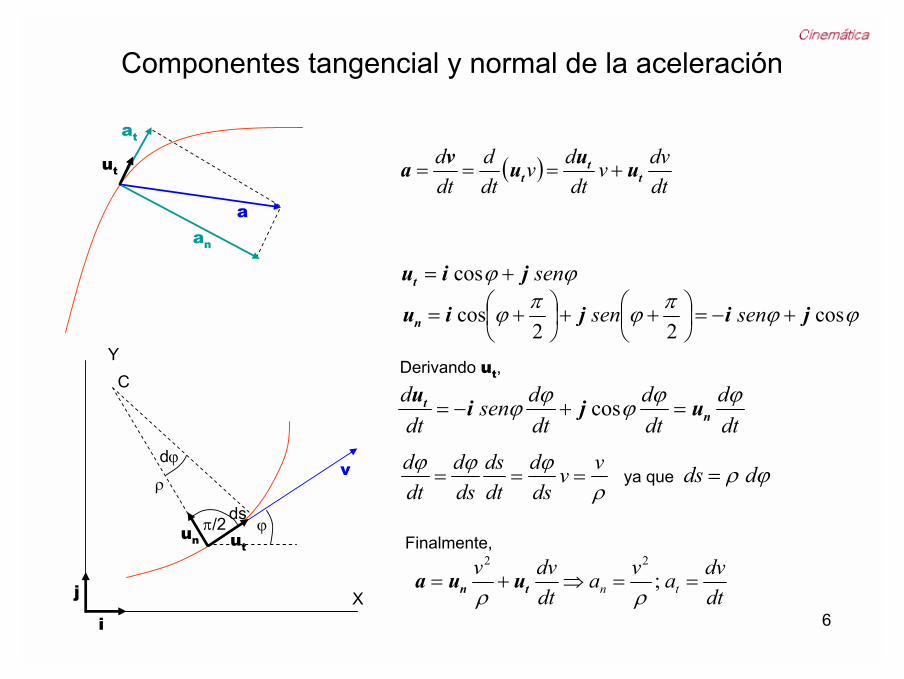
Componentes tangencial y normal de la aceleración
( )dtdvv
dtdv
dtd
dtd
tt
t uuuva +===
ϕϕ senjiut += cos
dtd
dtd
dtdsen
dtd ϕϕϕϕϕ n
t ujiu=+−= cos
aan
at
ut
Y
X
C
dϕ
ϕπ/2
i
j
utun
ds
vρ
ϕϕπϕπϕ cos22
cos jijiun +−=
++
+= sensen
Derivando ut,
ρϕϕϕ vvdsd
dtds
dsd
dtd
=== ya que ϕρ dds =
Finalmente,
dtdvava
dtdvv
tn ==⇒+= ;22
ρρ tn uua

7
Componentes tangencial y normal de la aceleración (2)
va φcos=⋅vaComo vsena φ=×vay
se cumple:
×=⋅=vava
vava
n
t
v
aan
at
Φ
φcosaat =
φensaan =
va
va
n
t
va
va
×=
⋅=

8
Posición, velocidad y aceleraciónEjemplo: El vector velocidad de una partícula viene dado por:
( ) ( ) ( )kjiv 145623 2 −+−+−= ttty el vector posición en el instante inicial es:
k.jir +−= 230Calcular: El vector posición y el vector aceleración en cualquier instante y las aceleraciones tangencial y normal en t = 1 s:
Obtenemos las componentes del vector posición a partir del vector velocidad:
( ) ;22323 2
xCttdttx +−=−= ∫ ( ) ;5256 32yCttdtty +−=−= ∫ ( ) zCttdttz +−=−= ∫ 2214
Haciendo t = 0, la posición es r0, luego Cx = 3, Cy = -2 y Cz = 1 y la posición en cualquier instante es:
( ) ( )k.jir 122523223 232 +++
+= -ttt--tt-t
Derivando el vector velocidad, obtenemos:k.jia 4123 ++= t
En t = 1 s:
vat
av ⋅=
van
av×=
( ) ( )11
41233 kjikji ++⋅++=
1127
=
( ) ( )11
41233 kjikji ++×++=
119532 kji ++−
=11
1130=
9
Movimiento con aceleración constante
∫ ∫=⇒=f
i
v
v
avvaf
i
t
t
dtddtd
∫ ∫=⇒=f
i
r
r
vrrvf
i
t
t
dtddtd
∫=f
i
t
t
dta ( )if tt −= a ( )if tt −+=⇒ avv if
( )[ ]∫ −+=f
i
t
tif dtttavi ( ) ( )2
21
ifif tttt −+−= avi
( ) ( )221
ifif tttt −+−+=⇒ avrr iif
Para ti = 0, ;tavv i += 2
21 tt avrr ii ++=
El movimiento es parabólico y se desarrolla en un plano ya que el vector v esla suma de un vector constante, vi , y de otro, a t, que solo varía en módulo.

10
Movimiento con aceleración constante. Proyectiles
2
21 tt
t
gvr
gvv
i
i
+=
+=
( )
−+=+
−+=+
jjiji
jjiji
2
21 tgtvvyx
tgvvvv
iyix
iyixyx
Y
X
viviy
vix
v1v1y
vx
v2 = vx i
v3v3y
vf
vfy
vx
vx
g 2
21,
;
tgtvytvx
tgvvvv
iyix
iyyixx
−==
−==
Tiempo para altura máxima :
Altura máxima:
Alcance:
Ecuación de la trayectoria:
gsenv
gv
tv iiyy
α==⇒= 0
gsenv
gsenvg
gsenvh iii
máx 221 22
2
2222 ααα=−=
gsenv
gsenv
gsenvvxy iii
imáxααααα 2cos22cos0
22
===⇒=
( )xxvg
vxg
vsenvxy
iii
i αααα
α tancos2cos2
1cos
22222
2
+−=−=
ra ∆⋅=− 222if vvLa expresión
la podemos poner ahora como:
Caída desde una altura h partiendodel reposo
Ascensión vertical desde el suelo
( )( ) hgvhgv 222 =⇒−−=
( ) hgvhgvi 220 2 =⇒−+=
(v=velocidad de llegada al suelo)
(v=velocidad de salida del suelo)
= vxOα

11
Movimiento con aceleración constante
Ejemplo 2: En una carrera de atletismo se corre la prueba de 100 metros lisos. El ganador recorre la distancia en 10 s pero, justamente al cruzar la línea de meta es alcanzado en la cabeza por el proyectil disparado a la salida. El proyectil ha sido disparado desde una altura igual a la de la cabeza del ganador. ¿Con qué ángulo y a qué velocidad se efectuó el disparo?Recordamos las ecuaciones del tiro parabólico: 2
21; tgsentvycostvx ii −== αα
Poniendo valores:
=⇒−=
=⇒=
αα
αα
senvsenv
cosvcosv
ii
ii
49108,921100
1010100
2º47,78=⇒α9,4
1049
==αtan
Sustituyendo en una de las otras dos ecuaciones:
º47,7810 cosvi=smvi 50=⇒
Ejemplo 1: Si un objeto cae libremente partiendo del reposo, recorre la mitad del camino total en el último segundo de su caída (t2 = 1 s). ¿Desde qué altura ha caído?La ecuación para la segunda mitad del recorrido la podemos poner como: 2
222 2
12
tgtvhh +=
Pero la velocidad cuando ha recorrido la mitad es:2
22
hgvh = Por lo tanto,
222 2
12
22
tgthgh+= ghg
21
+= hggh 2=−⇒
hghggh 4222 =−+⇒ 06 22 =+−⇒ ghgh mh 12,57=⇒
(donde se ha sustituido t por su valor, 1 s)
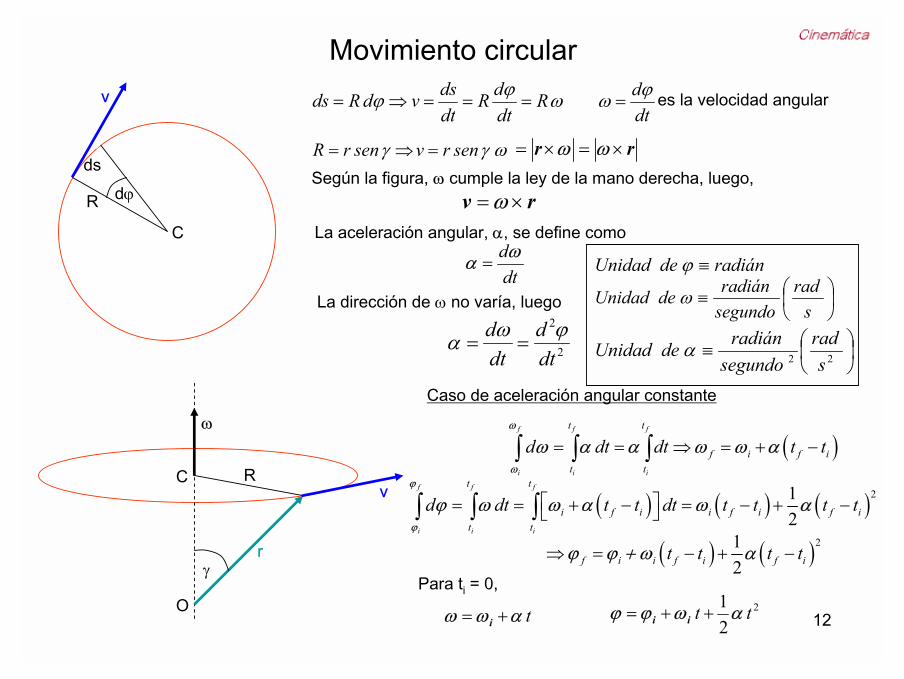
12
( )f f f
i i i
t t
f i f it t
d dt dt t t= = ⇒ = + −∫ ∫ ∫ω
ω
ω α α ω ω α
( ) ( ) ( )212
f f f
i i i
t t
i f i i f i f it t
d dt t t dt t t t t = = + − = − + − ∫ ∫ ∫ϕ
ϕ
ϕ ω ω α ω α
( ) ( )212f i i f i f it t t t⇒ = − + −ϕ ϕ + ω α
Movimiento circularωϕϕ R
dtdR
dtdsvdRds ===⇒=
dtdϕω =
r
v
γ
C R
ω
O
v
dsdϕ
C
R
es la velocidad angular
ωγγ senrvsenrR =⇒= rr ×=×= ωω
rv ×=ωSegún la figura, ω cumple la ley de la mano derecha, luego,
La aceleración angular, α, se define como
dtdωα =
La dirección de ω no varía, luego
2
2
dtd
dtd ϕωα ==
Caso de aceleración angular constante
Para ti = 0,
tαωω += i2
21 tt αωϕϕ ++= ii
≡srad
segundoradiándeUnidad ω
radiándeUnidad ≡ϕ
≡ 22 srad
segundoradiándeUnidad α

13
Movimiento circular. Componentes de la aceleración lineal
dtdvat =
ρ
2van =
( )dtdR
dtRd ωω
== αR=
( ) RRR 2
2
ωω==
Movimiento circular uniforme
( )dt
ddtd rva ×
==ω
dtdr
×=ω v×=ω ( )r××= ωω
r
v
γ
C
ω
O
ω
ω x v
( ) ( )centrípetanaceleracióRsenrωa 2ωγωω ==×= rω
R

14
Movimiento circular
Ejemplo: Aceleración centrípeta que sufre una persona que se encuentra en Logroño en reposo con respecto al suelo. Datos: Radio de la Tierra, R = 6,37·103 km. Latitud de Logroño, θ = 42º.
Eje de rotación
R
r Logroño
La Tierra gira con velocidad angular constante y tarda un día en dar una vuelta sobre sí misma, por tanto su velocidad angular es:
srad
díavuelta
8640021 πω ==
En la figura se ve que el radio de giro de un punto que está a 42º de latitud es r cuyo valor es:
mcoscosRr 66 1073,4º421037,6 ⋅=⋅== θ
θ
La aceleración centrípeta será pues:
26
9
22 025,01073,4
1046,74
smrac =⋅
⋅==
πω
ac

15
Movimiento relativo. Móviles puntuales
A
B
rBA
rA
rB
X
Y
Z
O
vA
vBaAaB
ABBABAAB rrrrrr −=⇒+=
( ) ( )kjikjikji AAABBBBABABA zyxzyxzyx ++−++=++
ABBAABBAABBA zzzyyyxxx −=−=−= ;;
Posición
Velocidad
Aceleración
dtd
dtd
dtd ABBA rrr
−= ABBA vvv −=⇒
dtd
dtd
dtd ABBA vvv
−= ABBA aaa −=⇒
zAzBzBAyAyByBAxAxBxBA vvvvvvvvv ,,,,,,,,, ;; −=−=−=
zAzBzBAyAyByBAxAxBxBA aaaaaaaaa ,,,,,,,,, ;; −=−=−=
16
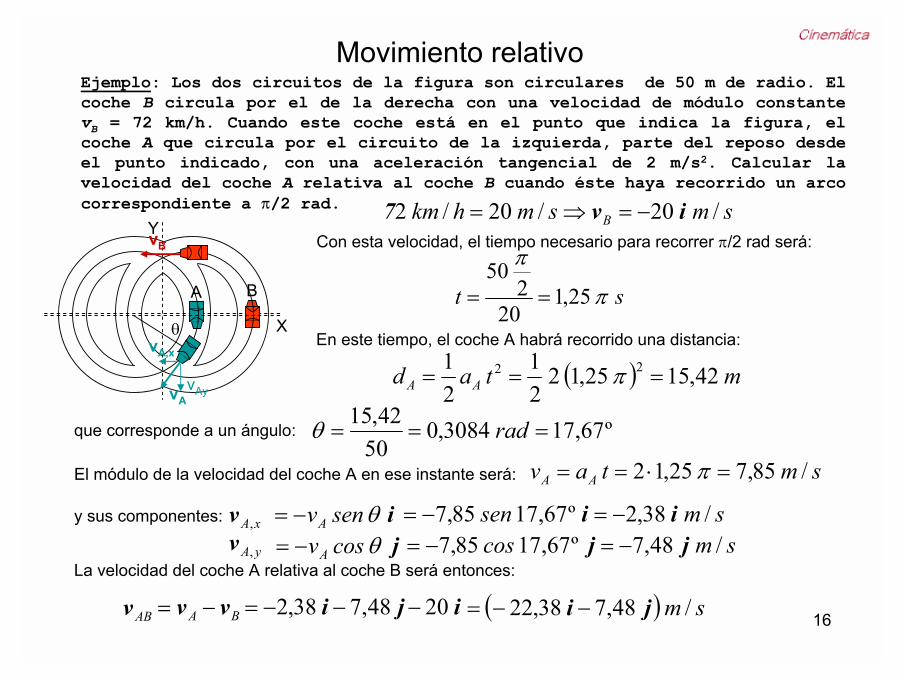
Movimiento relativo
smsmhkm B /20/20/2 iv7 −=⇒=
Ejemplo: Los dos circuitos de la figura son circulares de 50 m de radio. El coche B circula por el de la derecha con una velocidad de módulo constante vB = 72 km/h. Cuando este coche está en el punto que indica la figura, el coche A que circula por el circuito de la izquierda, parte del reposo desde el punto indicado, con una aceleración tangencial de 2 m/s2. Calcular la velocidad del coche A relativa al coche B cuando éste haya recorrido un arco correspondiente a π/2 rad.
Con esta velocidad, el tiempo necesario para recorrer π/2 rad será:
st π
π
25,120
250
==
En este tiempo, el coche A habrá recorrido una distancia:
A B
Y
X
( ) mtad AA 42,1525,1221
21 22 === π
que corresponde a un ángulo: º67,173084,050
42,15=== radθ
El módulo de la velocidad del coche A en ese instante será: smtav AA /85,725,12 =⋅== π
y sus componentes: xA,vyA,v
La velocidad del coche A relativa al coche B será entonces:
ABv
vA
vB
θ
smsen /38,2º67,1785,7 ii −=−=iθsenvA−=jθcosvA−= smcos /48,7º67,1785,7 jj −=−=
BA vv −= iji 2048,738,2 −−−= ( ) sm /48,738,22 ji −−=
vA,x
vAy

17
A B
Y
X
vA
vB
θvA,x
vAy

18
Movimiento armónico simple (MAS)
-A
+A
x
t
T
O
ϕ/ω
Movimiento oscilatorio: Movimiento que se repite alrededor de una posición de equilibrio. Si el movimiento se repite a intervalos regulares de tiempo, se denomina movimiento periódico, siendo el periodo, T, la duración de cada oscilación completa.
( )ϕω += tAx cos
A: Amplitud; ω: frecuencia angular; ϕ: Constante de fase o fase inicial
( ) ( ) πϕωϕω 2++=++ tTtωπ2
=⇒ T
T1
=ν ωνπ =⇒ 2
( )ϕωω +−== tsenAvdtdx
x
( )ϕωω +−== tAadtdv
xx cos2 x2ω−=
Movimiento armónico simple (MAS): Es el movimiento oscilatorio que sigue un objeto medianteuna función armónica, es decir la posición, x, como función del tiempo, t, se escribe
19
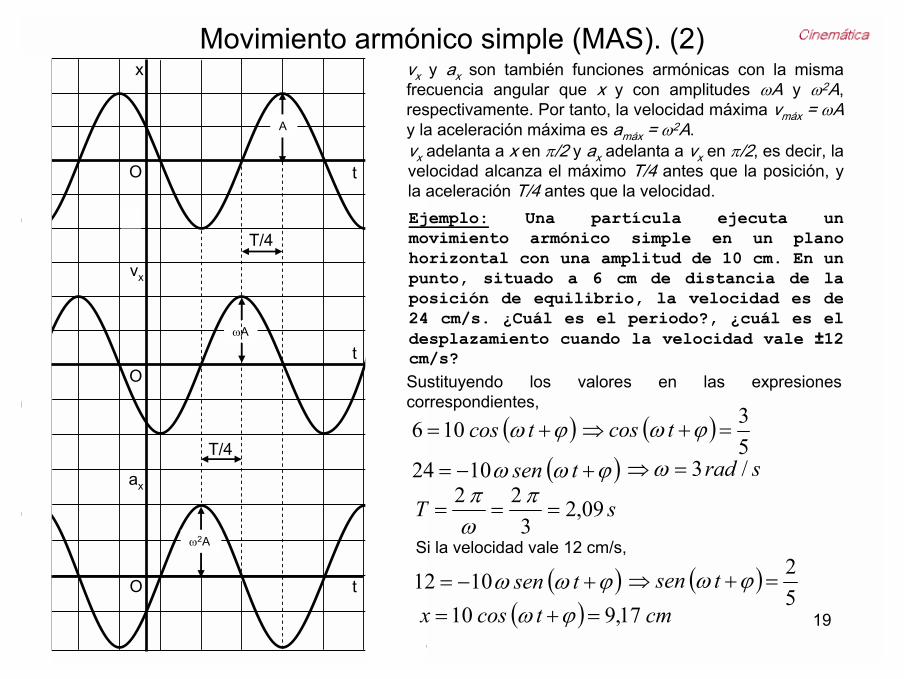
Movimiento armónico simple (MAS). (2)
-A
x
t
T/4
O
O
O
T/4
t
t
t
ω2A
A
ωA
vx
ax
vx y ax son también funciones armónicas con la misma frecuencia angular que x y con amplitudes ωA y ω2A, respectivamente. Por tanto, la velocidad máxima vmáx = ωAy la aceleración máxima es amáx = ω2A.vx adelanta a x en π/2 y ax adelanta a vx en π/2, es decir, la velocidad alcanza el máximo T/4 antes que la posición, y la aceleración T/4 antes que la velocidad.Ejemplo: Una partícula ejecuta un movimiento armónico simple en un plano horizontal con una amplitud de 10 cm. En un punto, situado a 6 cm de distancia de la posición de equilibrio, la velocidad es de 24 cm/s. ¿Cuál es el periodo?, ¿cuál es el desplazamiento cuando la velocidad vale ±12 cm/s?
( )ϕω += tcos106
Sustituyendo los valores en las expresiones correspondientes,
( )ϕωω +−= tsen1024
( )53
=+⇒ ϕω tcos
srad /3=⇒ω
sT 09,23
22===
πωπ
Si la velocidad vale 12 cm/s,
( )ϕωω +−= tsen1012 ( )52
=+⇒ ϕω tsen( ) cmtcosx 17,910 =+= ϕω
20
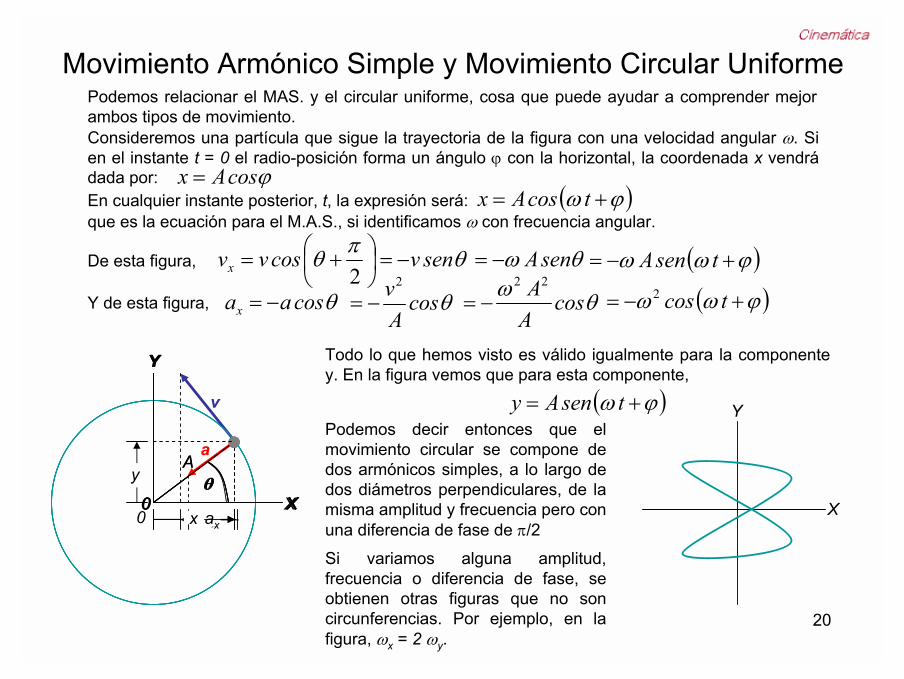
Movimiento Armónico Simple y Movimiento Circular Uniforme
ϕcosAx =
0
Aθ
xX
Y
0θ
vx
X
Y
v
0θ
ax
X
Y
a
Podemos relacionar el MAS. y el circular uniforme, cosa que puede ayudar a comprender mejor ambos tipos de movimiento.Consideremos una partícula que sigue la trayectoria de la figura con una velocidad angular ω. Si en el instante t = 0 el radio-posición forma un ángulo ϕ con la horizontal, la coordenada x vendrá dada por:
( )ϕω += tcosAxEn cualquier instante posterior, t, la expresión será:que es la ecuación para el M.A.S., si identificamos ω con frecuencia angular.
De esta figura,
+=
2πθcosvvx
Y de esta figura, θcosaax −=
θsenv−= θω senA−= ( )ϕωω +−= tsenA
θcosAv2
−= θω cosAA22
−= ( )ϕωω +−= tcos2
0
Aθ
xX
Y
y
Todo lo que hemos visto es válido igualmente para la componente y. En la figura vemos que para esta componente,
( )ϕω += tsenAyPodemos decir entonces que el movimiento circular se compone de dos armónicos simples, a lo largo de dos diámetros perpendiculares, de la misma amplitud y frecuencia pero con una diferencia de fase de π/2
Si variamos alguna amplitud, frecuencia o diferencia de fase, se obtienen otras figuras que no son circunferencias. Por ejemplo, en la figura, ωx = 2 ωy.
Y
X

21
0θ
vx
X
Y
v
0θ
ax
X
Y
a
0
Aθ
xX
Y
y

22
Movimiento Armónico Simple y Movimiento Circular Uniforme
Movimiento circular como composición de dos MAS con la misma amplitud y frecuencia con una diferencia de fase de π/2