antecedentes históricos de la robótica. · 2015-08-21 · desarrollo histórico ... 1922 aparece...
TRANSCRIPT

Antecedentes históricos de la
Robótica. Dr. Roberto Carlos García Gómez
Departamento de Metal-Mecánica.
Instituto Tecnológico de Tuxtla Gutiérrez
Desarrollo histórico GRECIA
• Mecanismos animados movidos por líquido, aire o vapor de agua de Herón de Alejandría (85 D.C.).
ARABIA
• Utilización práctica como dispensadores automáticos de agua para beber o lavarse.
EDAD MEDIA
• Hombre de hierro de Alberto Magno (1204-1282).
• Gallo de la Catedral de Estrasburgo (1352).
RENACIMIENTO
• León mecánico de Leonardo Da Vinci (1499).
• Hombre de palo de Juanelo Turriano (1525).

Ejemplos de mecanismos animados
Dispositivos de Herón de Alejandría.

Época preindustrial SIGLOS XVII-XIX:
• Muñecos de Jacques Vauncanson (1738):
• Flautista, tamborilero, pato, muñecas mecánicas.
• Jugador de ajedrez de Von Kempelen (1769).
• Androides de Jacques Droz (1770):
• Escriba, organista, dibujante. – Hiladora mecánica de Crompton (1779):
• Telar mecánico de Jacquard (1801)
• Muñeca dibujante de Henry Maillardet (1805).
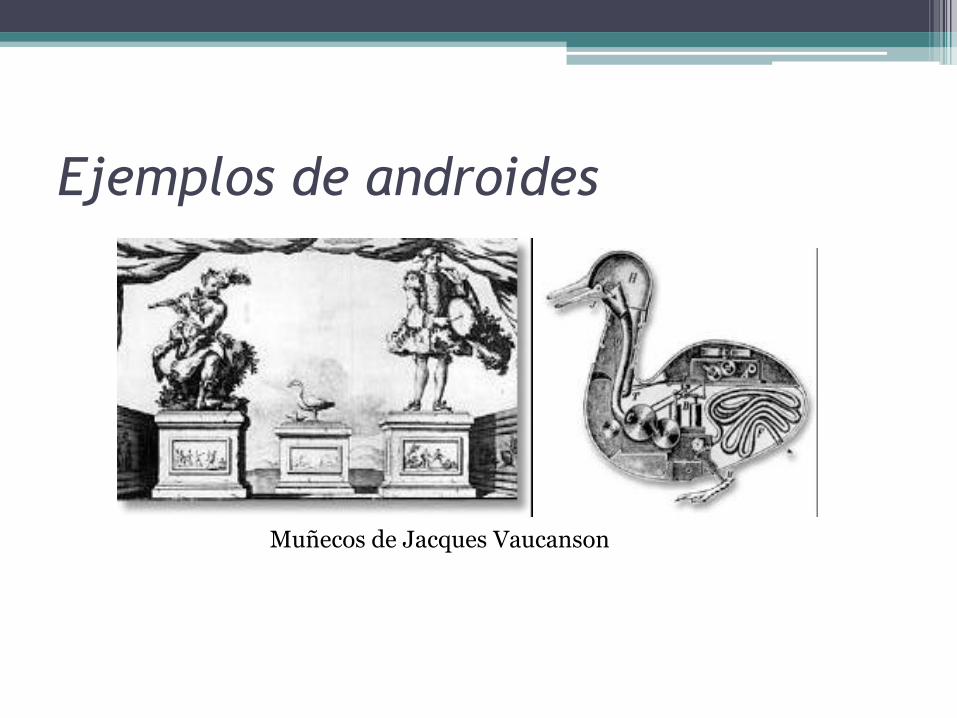
Ejemplos de androides
Muñecos de Jacques Vaucanson

Androides de Jacques Droz

Muñeca dibujante de Henry Maillardet

Desarrollo histórico ... 1922 Aparece la palabra robota en “Rossum´s Universal Robots” de Karel Capek 1940 I. Asimov acuña el término robótica: Estudio sistemático de los robots, su construcción, mantenimiento y comportamiento. 1954 Primeras patentes sobre robots en UK (Kenward) y USA (Devol) 1961 Engelberger y Devol fabrican el primer robot manipulador (Unimate-2000) 1967 General Electric Corp. construye un robot caminante de cuatro patas. La U. de Stanford presenta el primer robot móvil con ruedas
Desarrollo histórico (Cont.)
1970 Se construye el primer robot con accionamiento eléctrico en la U. de Stanford. Cincinnati Milacron Corp. Produce el T3 con accionamiento hidráulico y controlado por microprocesador 1973 Se funda ASEA (ABB), primer fabricante europeo 1976 La NASA emplea manipuladores en las sondas Viking 1 y 2 para recoger muestras en Marte 1978 Unimation lanza el PUMA (Programmable Universal Machine for Assembly) 1982 Se lanza el SCARA en Japón (Makino) 1983 Odetics Inc. Comercializa el primer robot caminante (ODEX I) ...
… Hasta nuestros días…

Pero… Que es un Robot?
Su origen. En 1921, en la obra de teatro "RUR" (Rossum´s Universal Robot "Robots Universales de Rossum"), de Karel Capek (1890 -1938), donde aparece la palabra “robot” del eslavo robota "trabajo forzado”. Posteriormente se utiliza el termino y la idea en un libro denominado Metrópolis de Tea Von Harbou la cual es llevada al cine por el cineasta Fritz Lang 1926.
Enciclopedia Británica: Es un mecanismo instrumentado que se usa en la ciencia e industria para sustituir al ser humano. No tiene que parecerse físicamente a un ser humano ni tiene por qué realizar sus tareas de un modo humano.
Robot Industrial (RI)
British Robot Association (BRA): Dispositivo reprogramable con un mínimo de cuatro grados de libertad diseñado para manipular y transportar piezas, herramientas o elementos especiales de fabricación a través de un programa variable de movimientos para realizar una tarea de manufactura específica.
Robotics Institute of America (RIA): Manipulador multifuncional y reprogramable, controlado automáticamente, diseñado para mover materiales, piezas, herramientas o dispositivos especializados a través de un programa variable de movimientos para realizar una tarea de manufactura específica.
Robot Industrial (RI)
Asociación Francesa de normalización (AFNOR): Manipulador: mecanismo formado generalmente por elementos en serie, articulados entre si, destinados al agarre y desplazamiento de objetos. Es multifuncional y puede ser gobernado directamente por un operador humano o mediante dispositivos lógicos, Robot: manipulador automático servo controlado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos espaciales, siguiendo trayectorias variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varias brazos terminados en muñecas. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su materia.

Clasificación de robots.
• Según la AFRI(Asociación Francesa de Robótica Industrial).
▫ Tipo A: Manipulador con control manual o telemando.
▫ Tipo B: Manipulador automático con ciclos preajustados; regulación de fines de carrera o topes.
▫ Tipo C: Robot programable con trayectorias continuas o punto a punto, sin conocimiento del entorno.
▫ Tipo D: Robot capaz de adquirir datos de su entorno, readaptando su tarea en función de estos.

Clasificación de robots.
• Según la IFR(Federación Internacional de Robótica).
▫ Robot secuencial.
▫ Robot de trayectoria controlable.
▫ Robot adaptativo.
▫ Robot telemanipulado.
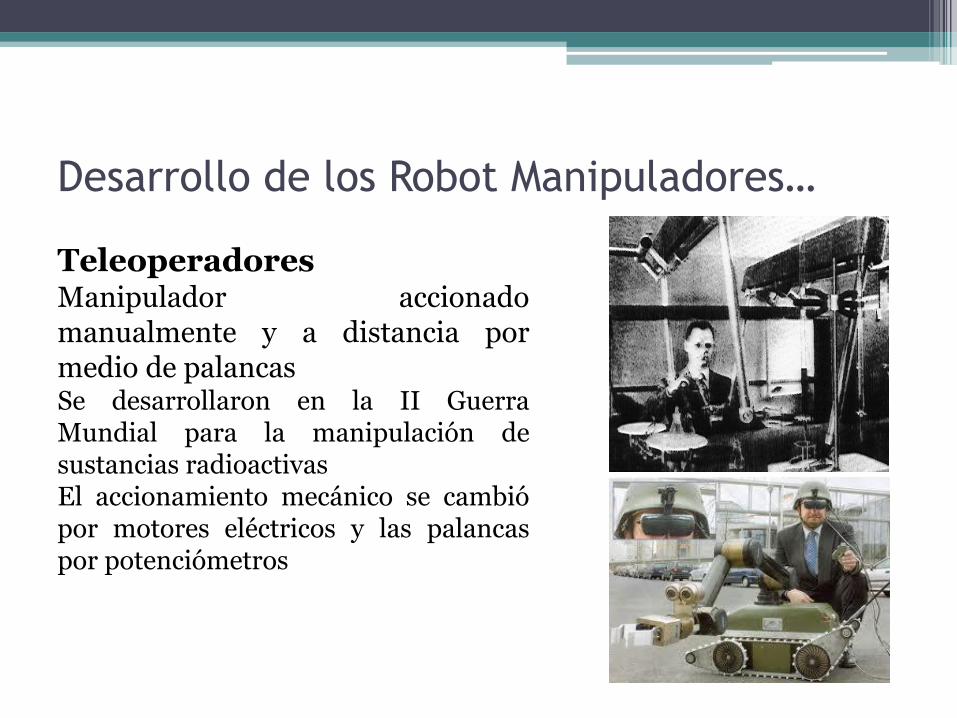
Desarrollo de los Robot Manipuladores…
Teleoperadores Manipulador accionado manualmente y a distancia por medio de palancas Se desarrollaron en la II Guerra Mundial para la manipulación de sustancias radioactivas El accionamiento mecánico se cambió por motores eléctricos y las palancas por potenciómetros

Manipuladores Master-Slave
Constan de dos dispositivos semejantes
uno es accionado por el operario
(Master) y el otro repite los
movimientos de éste (Slave)
Modos de funcionamiento:
Unilatera: El Slave simple-mente repite
los movimientos
Bilateral: El Slave repite los
movimientos e informa al Master de lo
que acontece

Manipuladores Master-Slave
JPL/AMES Manipulator Arm – Hubert “Vik” Vykukal (American)
Robotic Master-Slave Manipulator – Mark E. Rosheim.
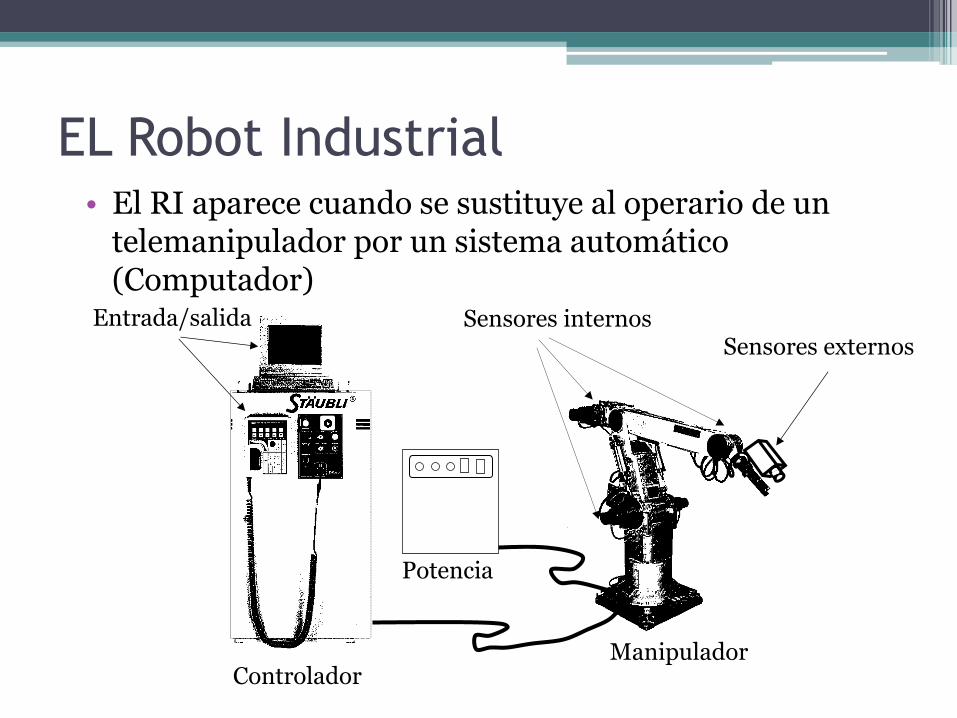
EL Robot Industrial • El RI aparece cuando se sustituye al operario de un
telemanipulador por un sistema automático (Computador)
Manipulador
Sensores internos Sensores externos
Controlador
Potencia
Entrada/salida

Configuración de un RI
Muñeca:
Balanceo (Roll):
180o 0o -90o (270o)
Cabeceo (Pitch):
-90o 0o 50o (140o)
Guiñada (Yaw):
- 45o 0o 15o (60o)
Brazo:
CODO: 1 articulación
HOMBRO: 2 articulaciones
(hombro + cintura)

Configuración de un RI (Cont.)
Grado de libertad (gdl):
Cada uno de los movimientos
independientes.
Manipulador universal:
6 gdl
Manipulador redundante:
>6 gdl
Manipulador con restricciones:
<6 gdl
Manipulador redundante
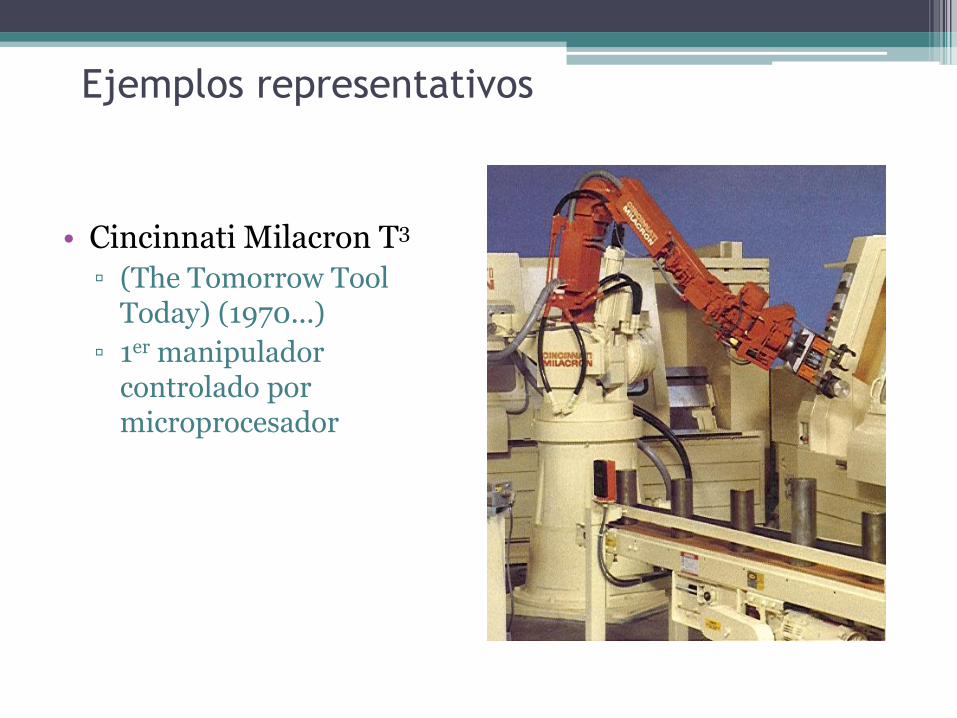
Ejemplos representativos
• Cincinnati Milacron T3
▫ (The Tomorrow Tool Today) (1970...)
▫ 1er manipulador controlado por microprocesador
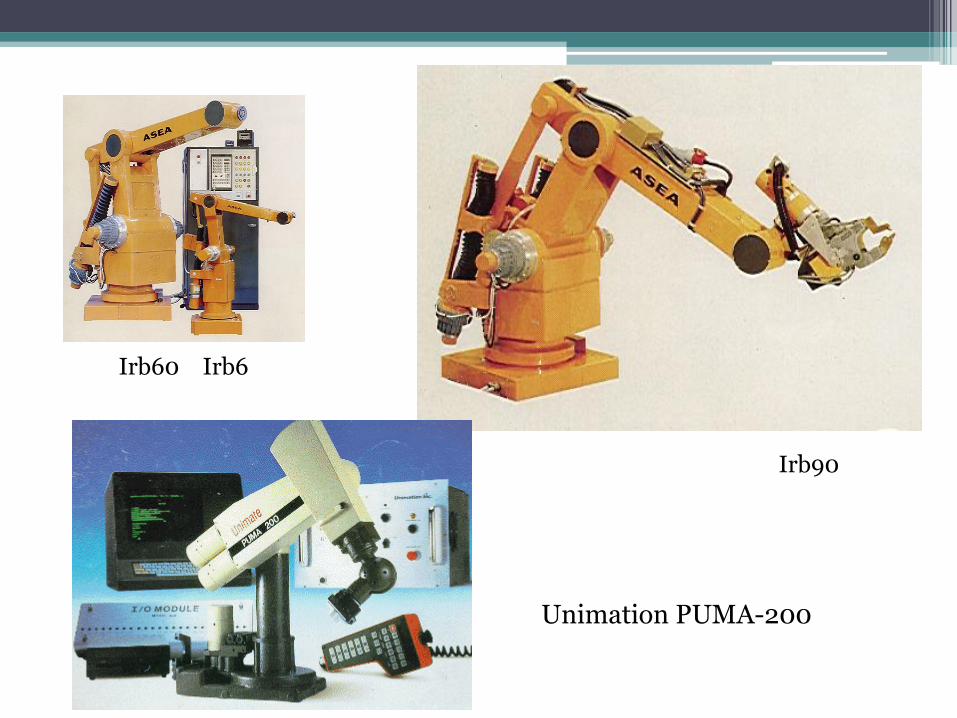
Irb60 Irb6
Irb90
Unimation PUMA-200
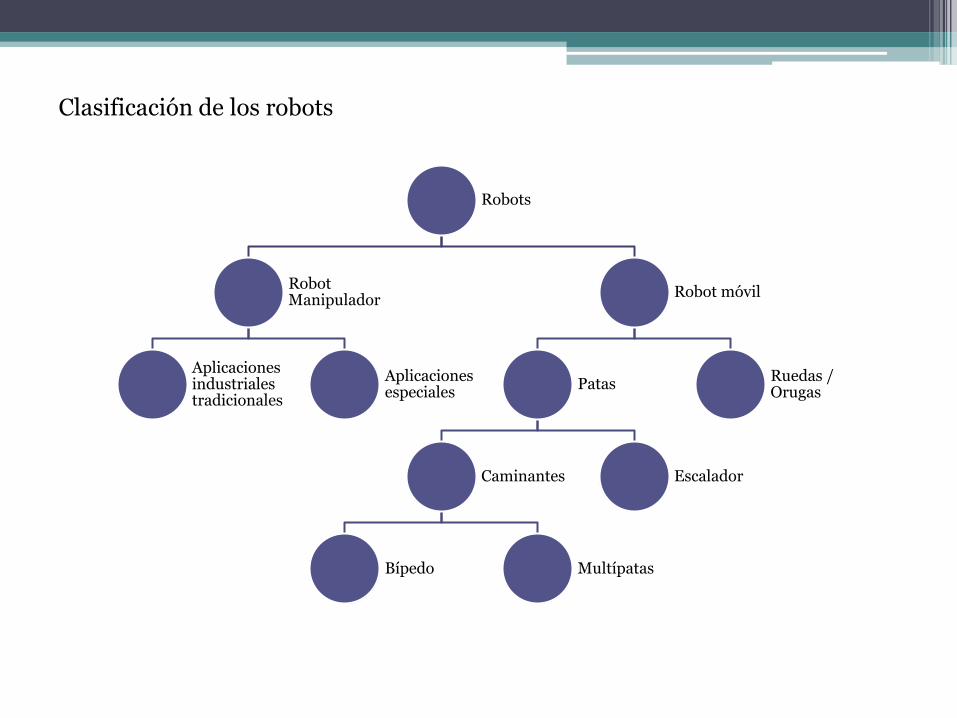
Clasificación de los robots
Robots
Robot Manipulador
Aplicaciones industriales tradicionales
Aplicaciones especiales
Robot móvil
Patas
Caminantes
Bípedo Multípatas
Escalador
Ruedas / Orugas

Clasificación de los robots Manipuladores
La clasificación más difundida se establece en función de los
siguientes tipos:
Configuración estructural
Tipo de control
Tipo de trayectorias
Tipo de programación
Tipo de energía
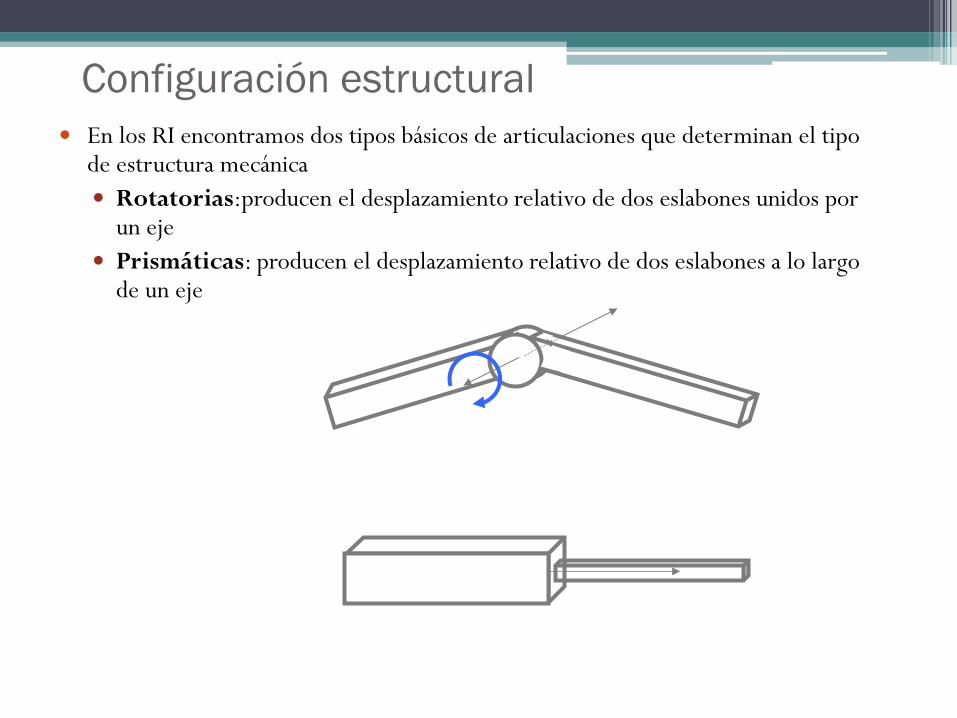
Configuración estructural
En los RI encontramos dos tipos básicos de articulaciones que determinan el tipo de estructura mecánica
Rotatorias:producen el desplazamiento relativo de dos eslabones unidos por un eje
Prismáticas: producen el desplazamiento relativo de dos eslabones a lo largo de un eje

Cilíndrica Esférica
– 2 o 3 movimientos diferentes...
• También podemos encontrar combinaciones...o variaciones
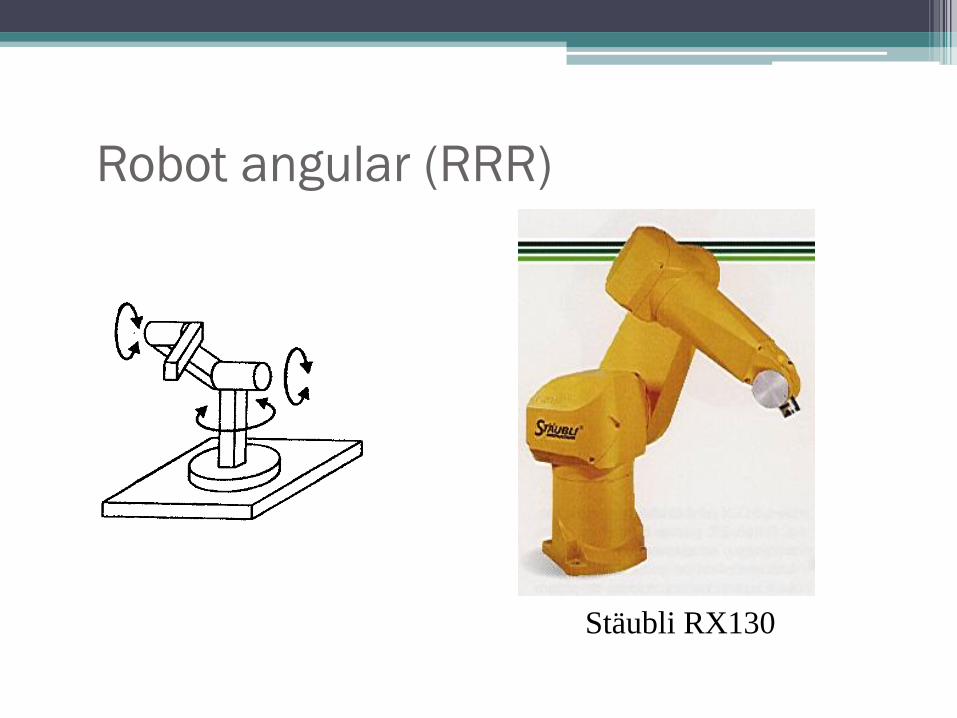
Robot angular (RRR)
Stäubli RX130

Robot polar (RRP)
Unimate-2000
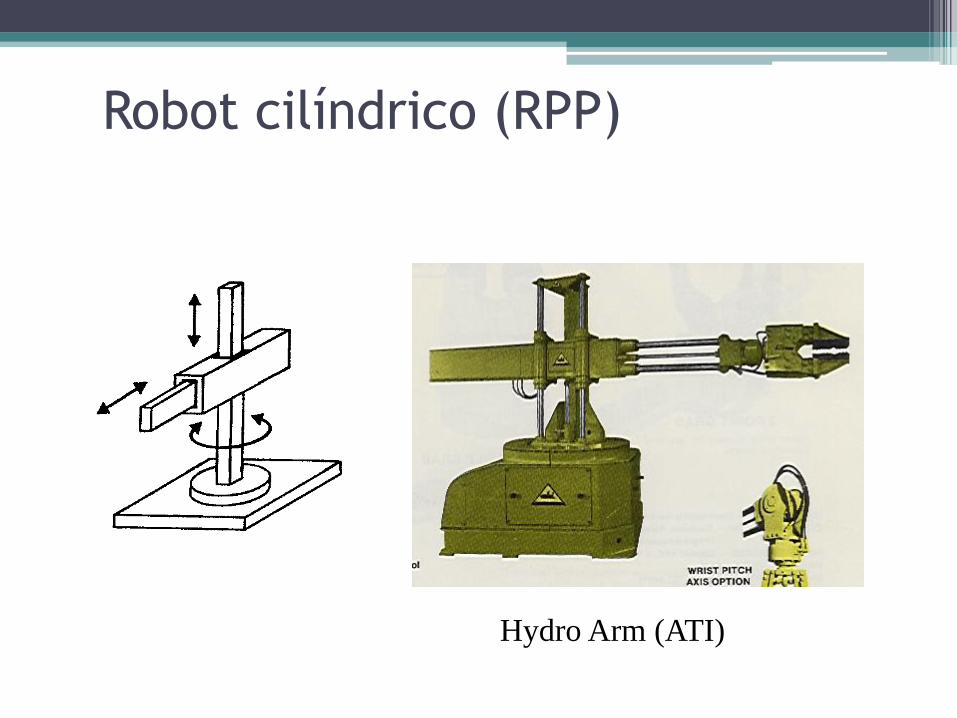
Robot cilíndrico (RPP)
Hydro Arm (ATI)
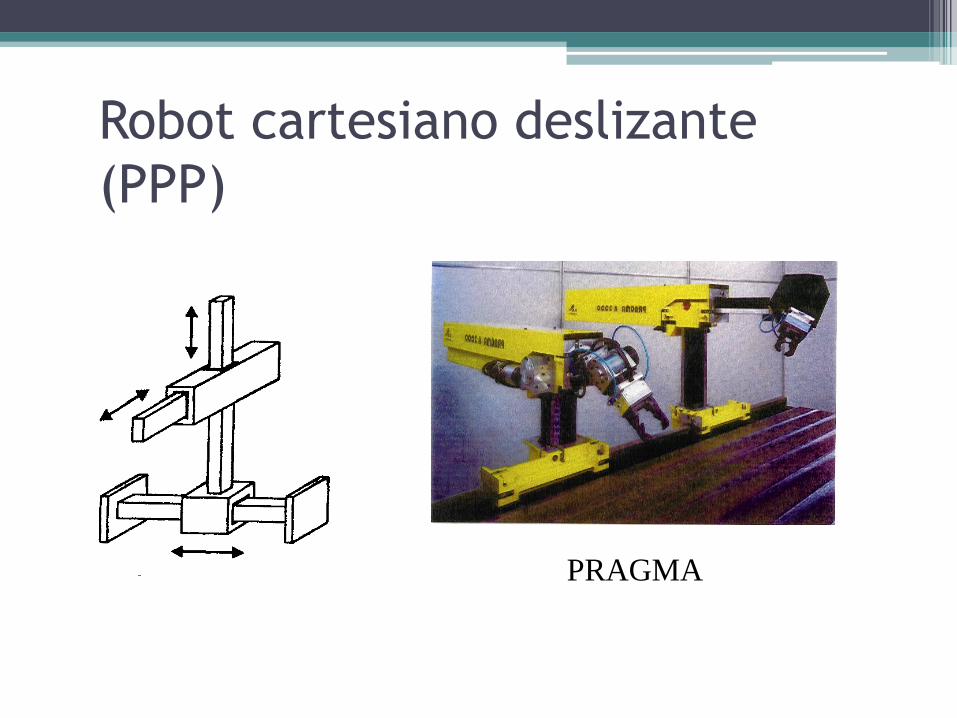
Robot cartesiano deslizante
(PPP)
PRAGMA
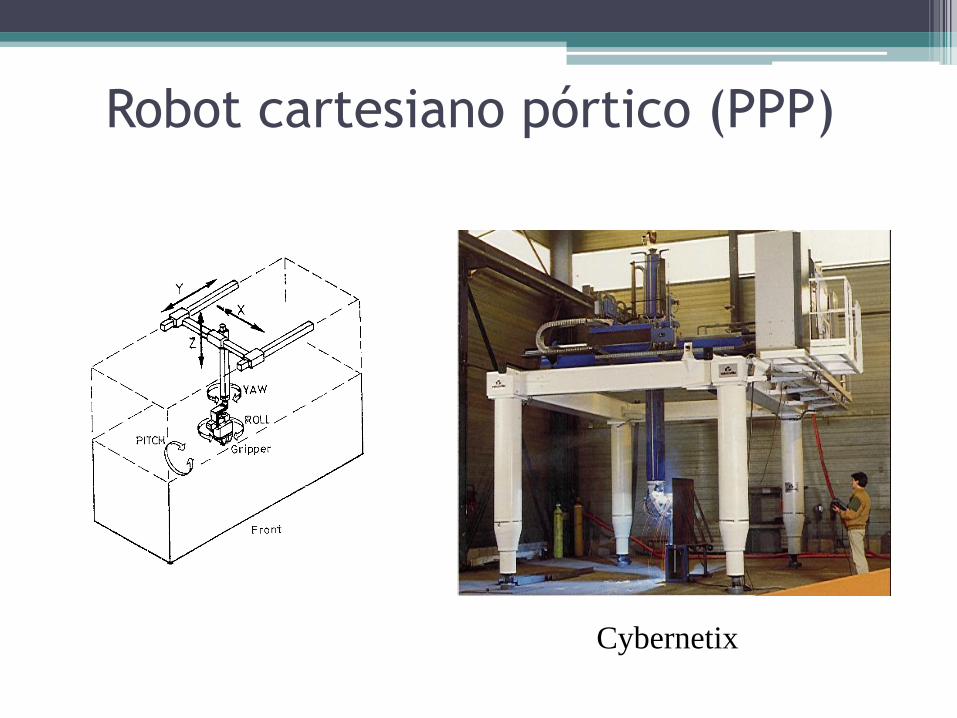
Robot cartesiano pórtico (PPP)
Cybernetix

Robot SCARA (RRP)
FAGOR
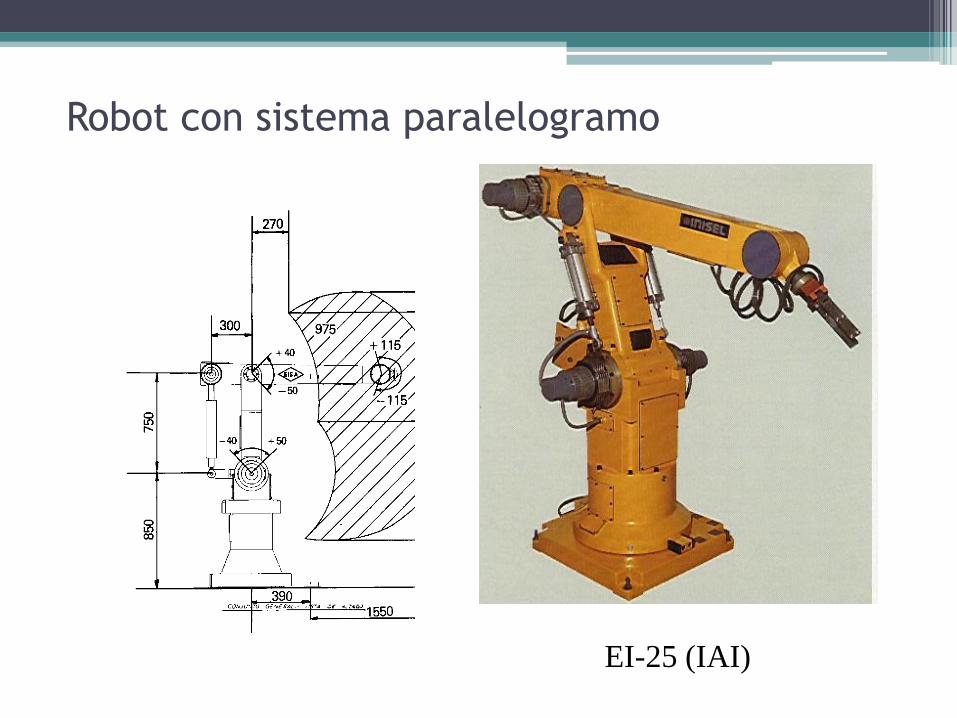
Robot con sistema paralelogramo
EI-25 (IAI)

Manipuladores: Clasificación por Tipo de control
• Secuencia-controlada ▫ Tienen dos posiciones
fijas por eje
▫ La programación puede ser mecánica o eléctrica
▫ Se programa la secuencia de movimientos y las esperas
• Servocontrolados ▫ Trabajan en lazo cerrado
y pueden controlar la posición, velocidad, aceleración y fuerza.
Manipuladores: Clasificación por Tipo de control
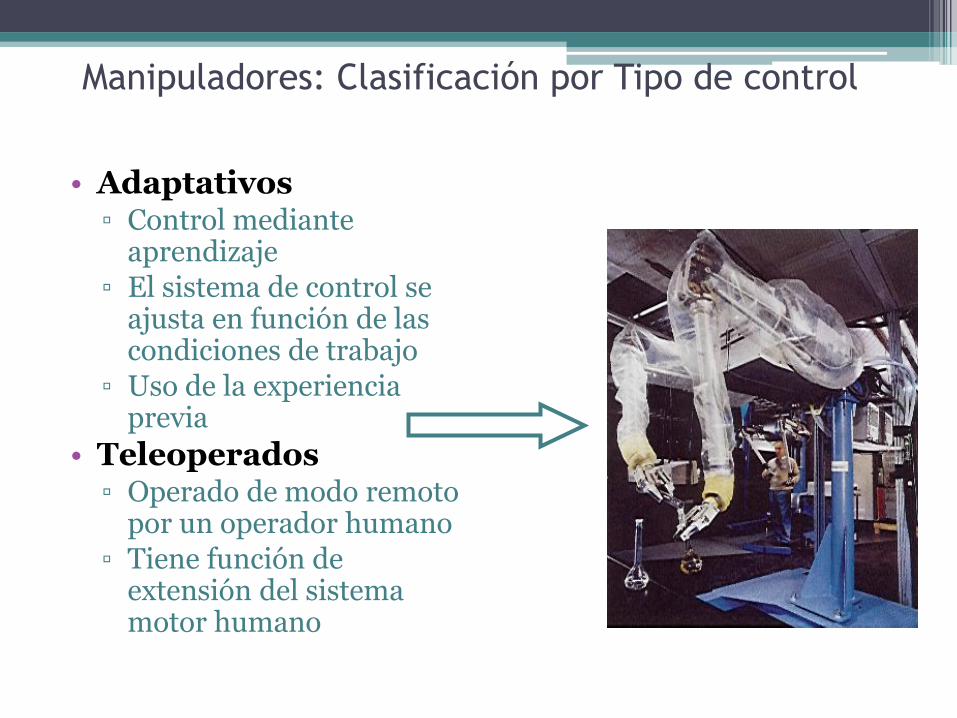
• Adaptativos ▫ Control mediante
aprendizaje
▫ El sistema de control se ajusta en función de las condiciones de trabajo
▫ Uso de la experiencia previa
• Teleoperados ▫ Operado de modo remoto
por un operador humano
▫ Tiene función de extensión del sistema motor humano

Manipuladores: Tipo de programación
• ON-LINE
▫ Guiado: el operario mueve el extremo de la herramienta y el controlador graba los puntos de paso
Manipuladores: Tipo de programación
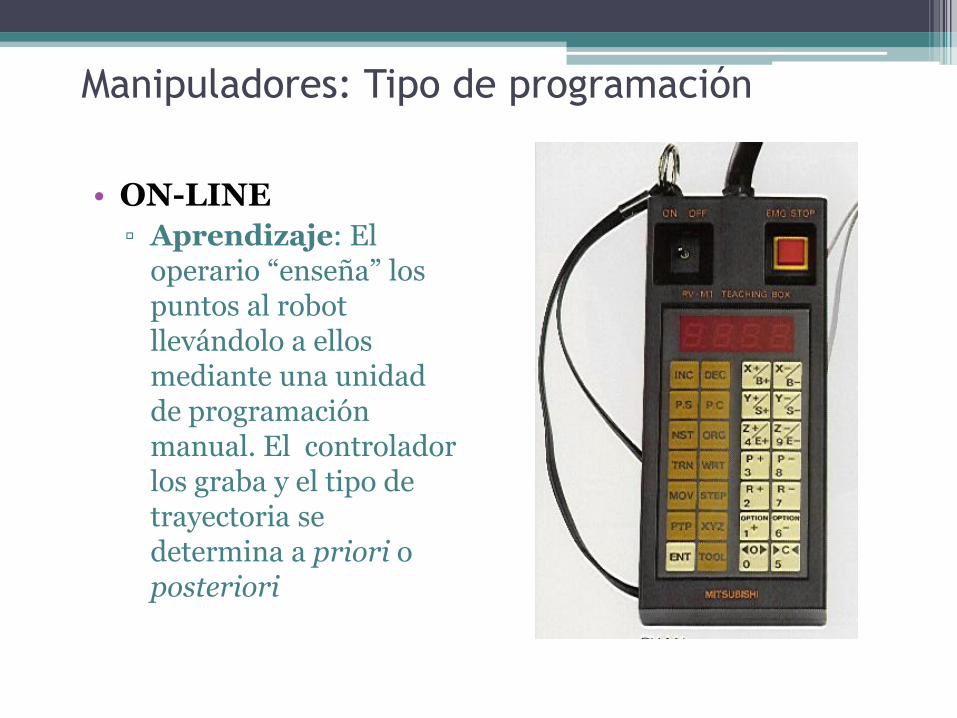
• ON-LINE
▫ Aprendizaje: El operario “enseña” los puntos al robot llevándolo a ellos mediante una unidad de programación manual. El controlador los graba y el tipo de trayectoria se determina a priori o posteriori

Manipuladores: Tipo de programación
• OFF-LINE
▫ Textual: Se programa utilizando un lenguaje de tipo convencional y las instrucciones y datos se introducen textualmente (teclado)
▫ Gráfico: Se dispone de un sistema gráfico que define el entorno del trabajo del robot y los puntos de posiciona-miento se seleccionan con el ratón

Manipuladores: Tipo de energía
• Hidráulicos: (+) Mueven cargas muy pesadas (+) Presentan una gran relación par/peso (+) Rápidos en desplazamientos lineales (+) Son muy robustos y baratos (-) Difíciles de mantener y propensos a fugas de
aceite • Neumáticos:
(+) Mueve cargas no muy pesadas (+) Presentan buena relación par/peso (+) Rápidos en desplazamientos lineales (+) Son robustos y baratos (+) Fáciles de mantener (-) Presentan problemas de control (viscosidad y
comprensibilidad del aire)
• Eléctricos Fáciles de controlar
Fáciles de mantener
Baja relación par/peso
Tipos:
Corriente continua
Corriente continua sin escobillas (Brushless)
Paso a paso
Corriente alterna

• Grado de movilidad: Número de articulaciones que pueden moverse
• Grado de libertad: Número de movimientos independientes en el espacio tridimensional
1 gdl
4 gdm 2 gdl
4 gdm 3gdl
4gdm
3 gdl
4gdm
Rotación longitudinal
Manipuladores: Algunos conceptos básicos: Grados de movilidad y grados de libertad
? gdl
? gdm
Rotación transversal
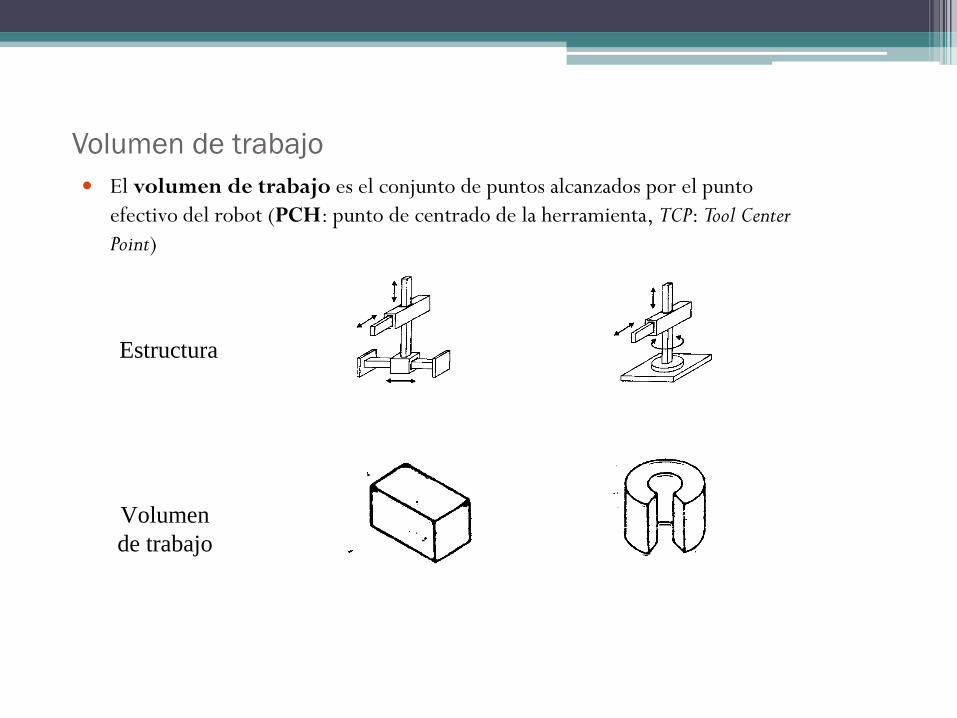
Volumen de trabajo
El volumen de trabajo es el conjunto de puntos alcanzados por el punto
efectivo del robot (PCH: punto de centrado de la herramienta, TCP: Tool Center
Point)
Estructura
Volumen
de trabajo
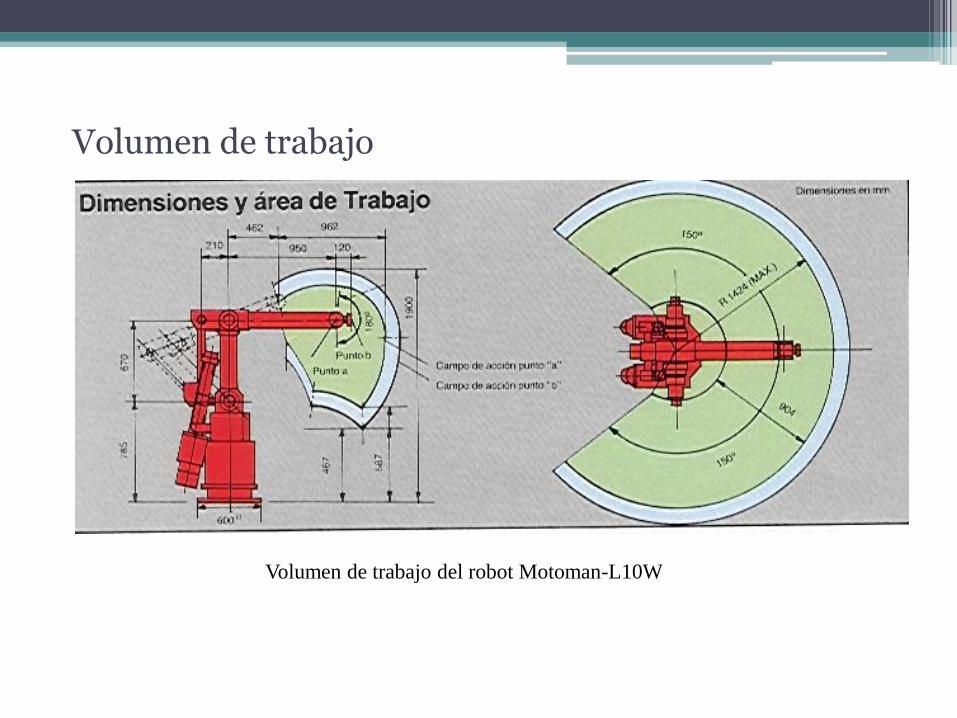
Volumen de trabajo del robot Motoman-L10W
Volumen de trabajo
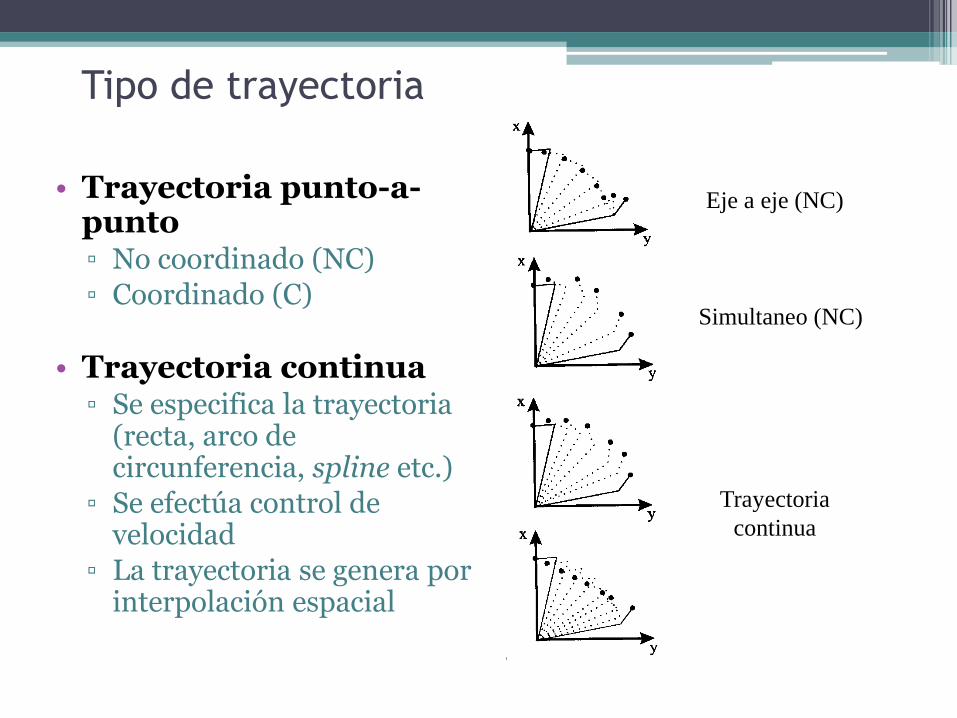
• Trayectoria punto-a-
punto ▫ No coordinado (NC)
▫ Coordinado (C)
• Trayectoria continua ▫ Se especifica la trayectoria
(recta, arco de circunferencia, spline etc.)
▫ Se efectúa control de velocidad
▫ La trayectoria se genera por interpolación espacial
Eje a eje (NC)
Simultaneo (NC)
Trayectoria
continua
Tipo de trayectoria

Manipuladores: Aplicaciones Industriales
Paletización:
Alimentación de maquinaria: Moldeado plástico Fundiciones Prensas Centros de mecanizado Tratamiento a altas temperaturas
Ingeniería de procesos:
Moldeado por recubrimiento Forjado Desbarbado Taladrado

Manipuladores: Aplicaciones
Soldadura:
Por puntos Por arco
Tratamiento de superficies:
Pintura con pistola pulverizadora Metalizado
Ensamblaje
Control de calidad
Medida, inspección
Entrenamiento, investigación, educación
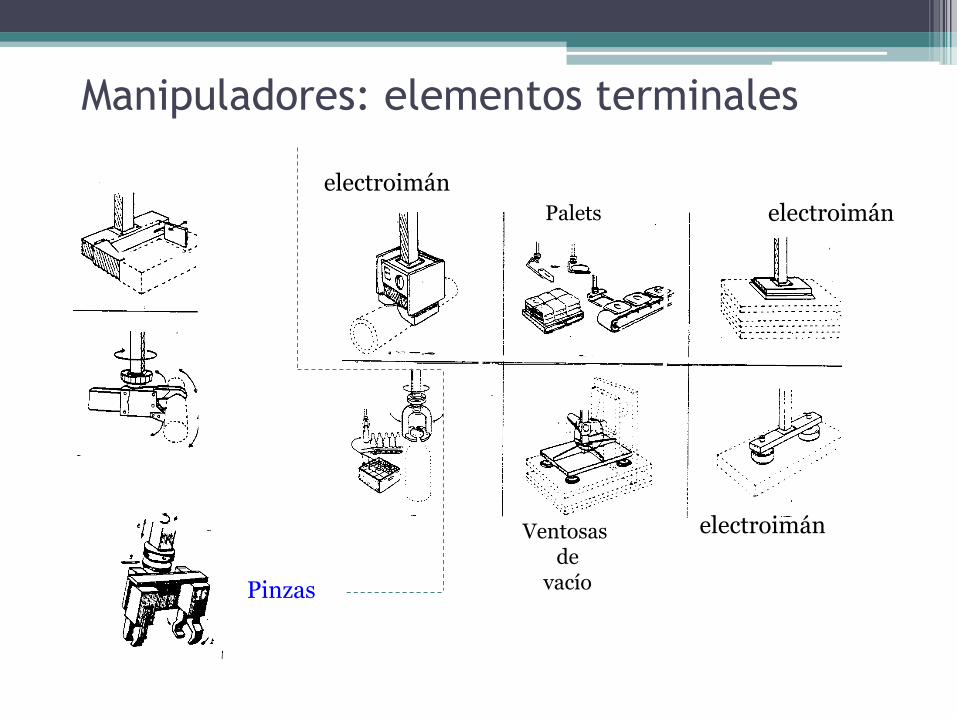
Manipuladores: elementos terminales
Pinzas
electroimán
electroimán
electroimán
Ventosas de
vacío
Palets
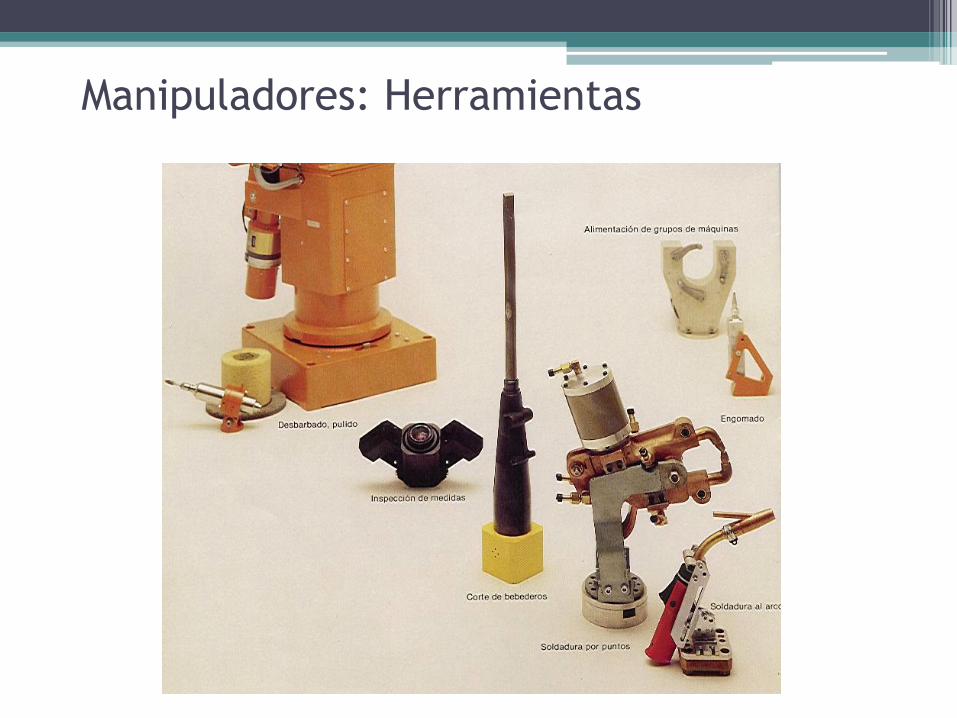
Manipuladores: Herramientas

Manipuladores: Aplicaciones especiales
• Aplicaciones espaciales ▫ Manipuladores para posicionamiento y recuperación de
satélites ▫ Manipuladores para vehículos de exploraciones ▫ Robots para construcciones en el espacio
• Aplicaciones submarinas y subterráneas ▫ Exploraciones ▫ Instalación y mantenimiento de cables submarinos ▫ Limpieza e inspección de tuberías
• Aplicaciones militares ▫ Desactivación de explosivos ▫ Robots centinelas
• Aplicaciones médicas ▫ Prótesis robotizadas ▫ Ayuda a discapacitados
• Aplicaciones agrícolas y ganaderas ▫ Manipuladores para sembrado y recogida de cosechas ▫ Robots esquiladores

Manipuladores: Aplicaciones especiales
• Inspección en la industria nuclear
SIROIN (IAI)

Manipuladores: Aplicaciones especiales
• Inspección en tendidos eléctricos.
▫ Robot teleoperado para mantenimiento de líneas de distribución de energía eléctrica
ROBTET (DISAM-UPM)
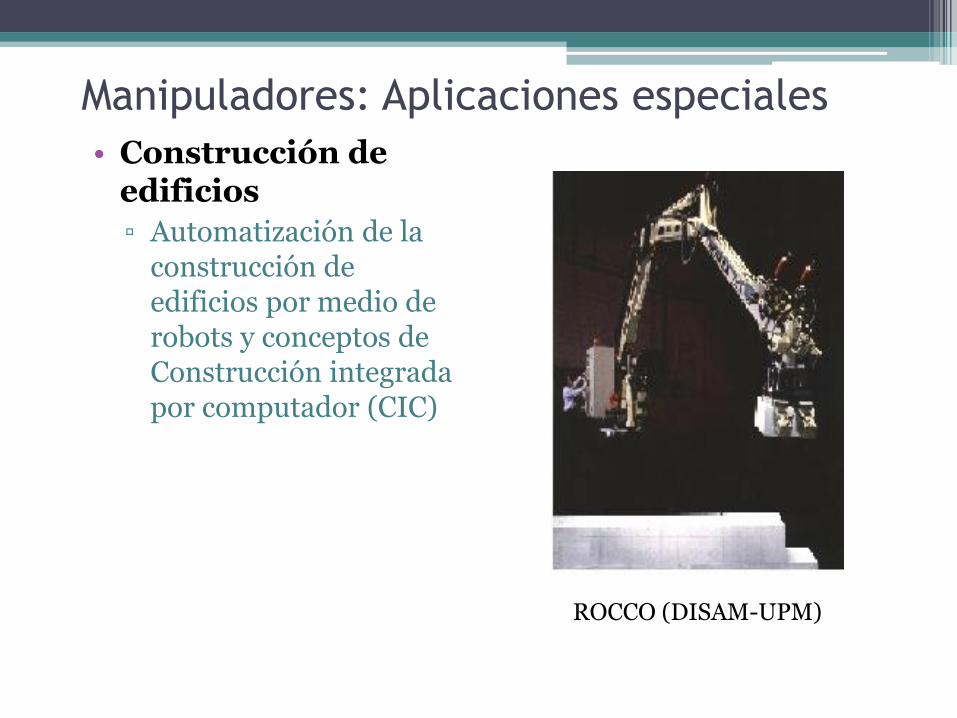
Manipuladores: Aplicaciones especiales
• Construcción de edificios
▫ Automatización de la construcción de edificios por medio de robots y conceptos de Construcción integrada por computador (CIC)
ROCCO (DISAM-UPM)
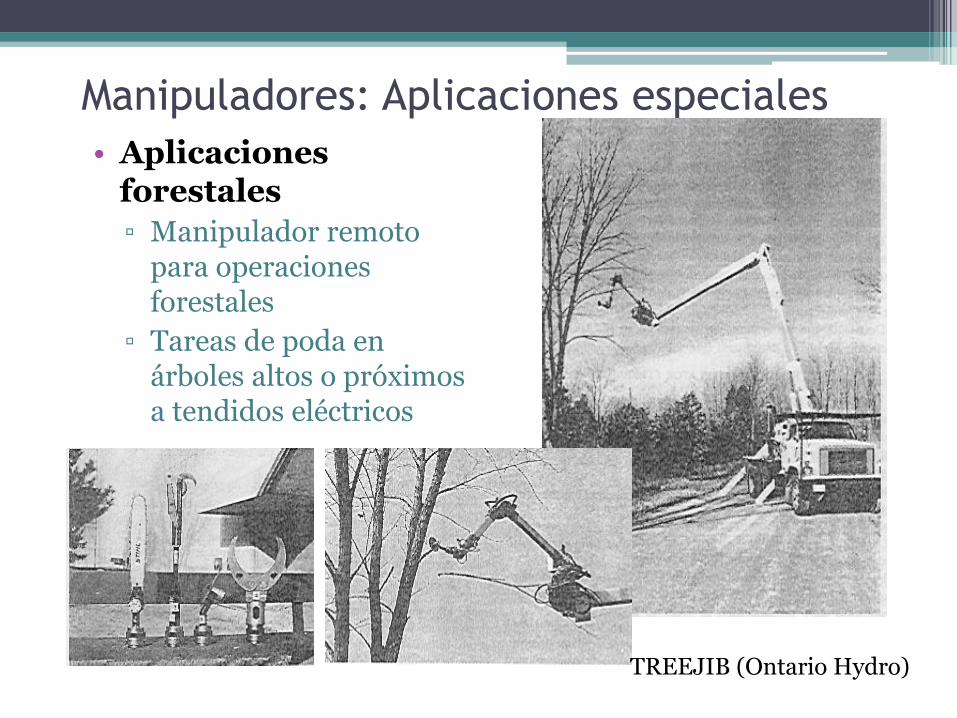
Manipuladores: Aplicaciones especiales
TREEJIB (Ontario Hydro)
• Aplicaciones forestales
▫ Manipulador remoto para operaciones forestales
▫ Tareas de poda en árboles altos o próximos a tendidos eléctricos
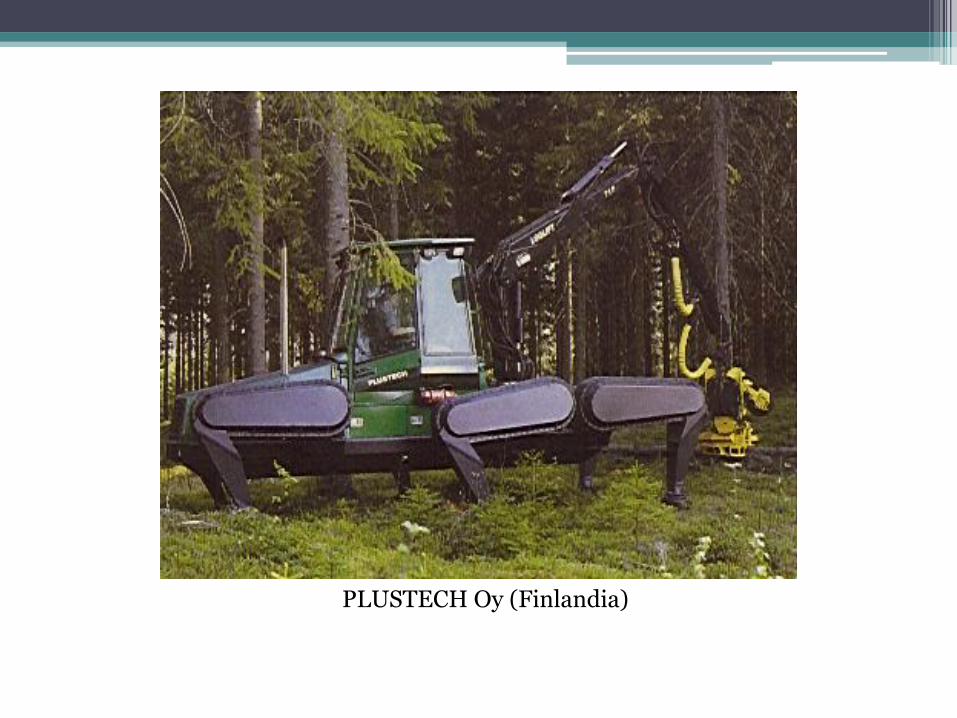
PLUSTECH Oy (Finlandia)
Robots con ruedas: Carro
▫ Dos ruedas motrices (1 motor)
▫ Dos ruedas directrices (1 motor)
VIAS (IAI)

Robots con ruedas: Mecanismo diferencial
Sojourner (JPL)
RoboSoft Hermes B21

Robots con orugas ▫ Pueden considerarse
vehículos con ruedas que transportan su propio sistema de apoyo
▫ Las orugas se consideran ruedas virtuales de radio igual a la mitad de la longitud de la oruga
▫ El sistema básico es equivalente a un robot con ruedas de tipo diferencial
Cybernetix
KHG
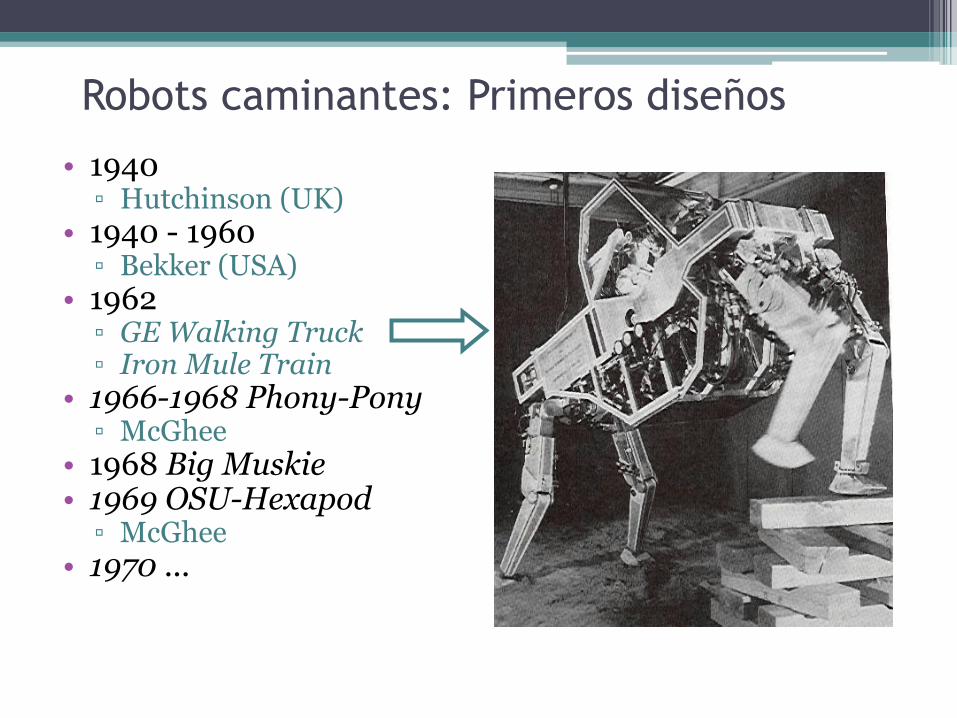
Robots caminantes: Primeros diseños
• 1940 ▫ Hutchinson (UK)
• 1940 - 1960 ▫ Bekker (USA)
• 1962 ▫ GE Walking Truck ▫ Iron Mule Train
• 1966-1968 Phony-Pony ▫ McGhee
• 1968 Big Muskie • 1969 OSU-Hexapod
▫ McGhee • 1970 ...

Robots caminantes: Realizaciones
OSU-Hexapod
RIMHO-IAI
ODEX

• RIMHO (IAI)

• Aplicaciones militares
Adaptive Suspension Vehicle (ASV-OSU)

• Exploraciones espaciales
AMBLER-CMU
• Educación y entretenimiento
PALAIOMATION-IAI

• Construcción naval
ROWER-IAI

Robots escaladores:Aplicaciones • Construcción naval
▫ Robot escalador portador de sistema de soldadura
▫ 6 patas en configuración SCARA
▫ 100 Kg de carga útil
▫ 250 Kg de peso
▫ Dispositivo de agarre formado por electroimanes
▫ Dimensiones del cuerpo:
110x60x40 cm
REST-IAI
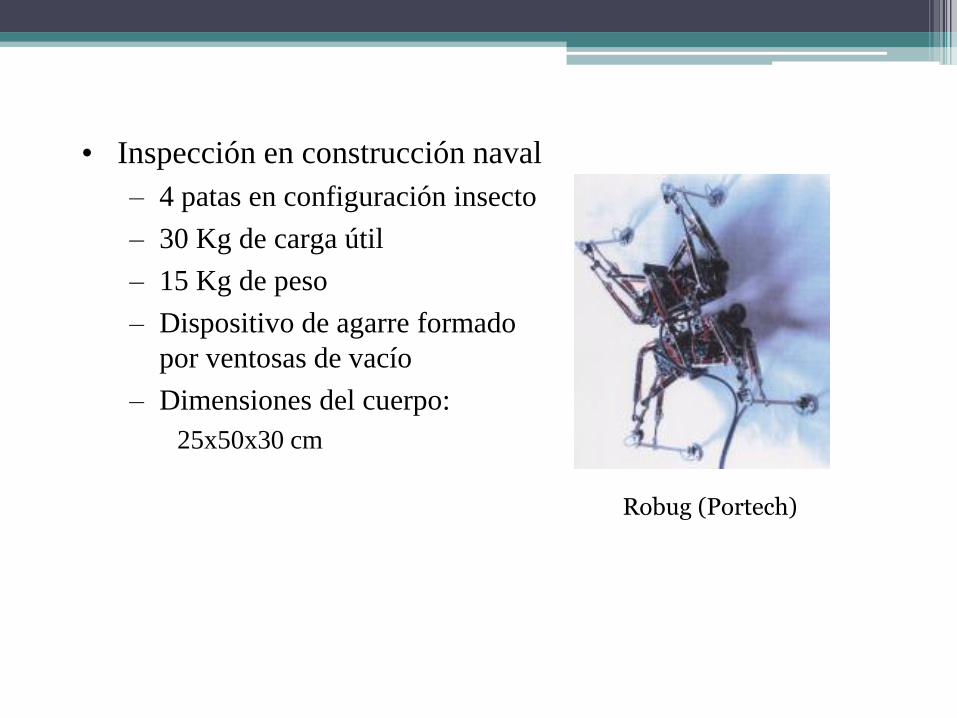
• Inspección en construcción naval
– 4 patas en configuración insecto
– 30 Kg de carga útil
– 15 Kg de peso
– Dispositivo de agarre formado
por ventosas de vacío
– Dimensiones del cuerpo:
25x50x30 cm
Robug (Portech)
Robots bípedos: Realizaciones
• Salford Lady (U. de Salford)
▫ Altura: 1,7 m
▫ Peso: 12 Kg
▫ GDL: 8 (motores DC)

Robots bípedos: Realizaciones
• Honda Human Robot
– Altura: 1,8 m
– Peso: 210 Kg
– GDL: 8
– Carga: 5 kg/mano
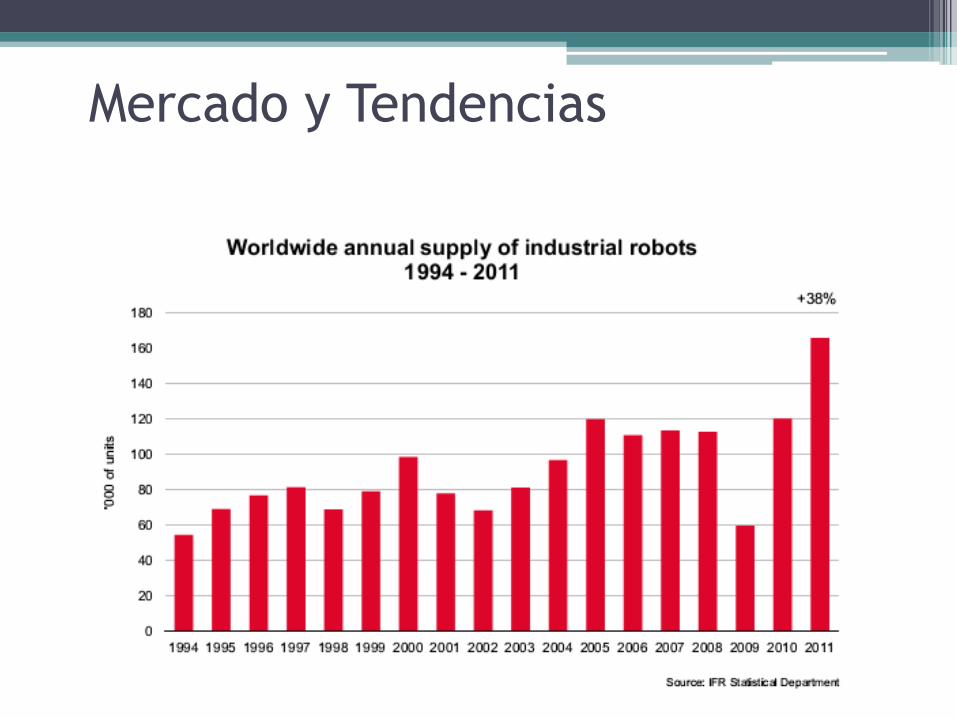
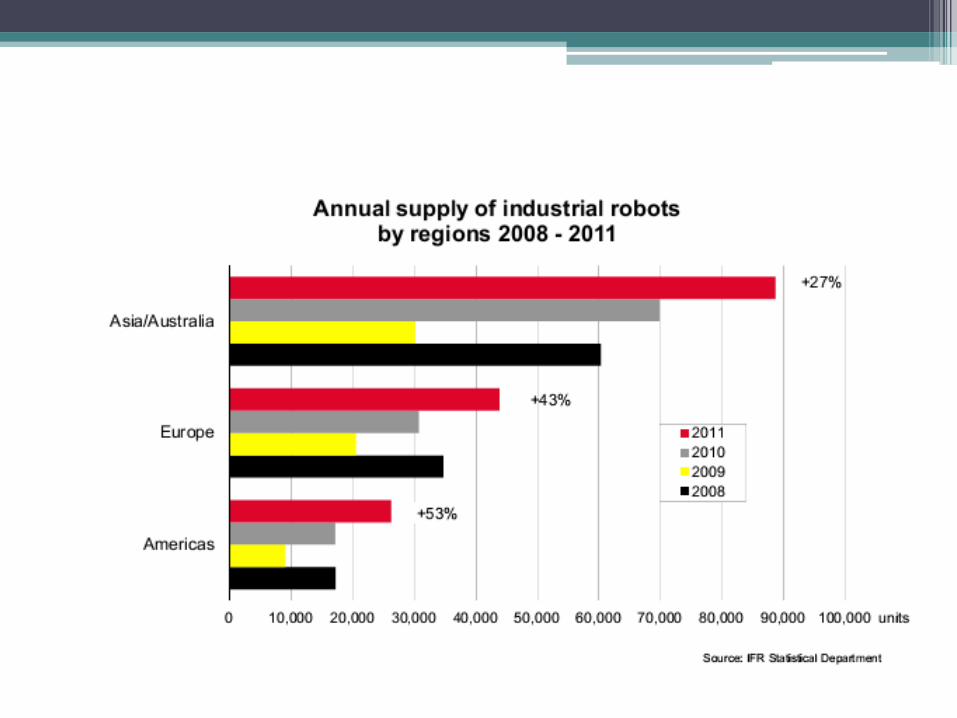
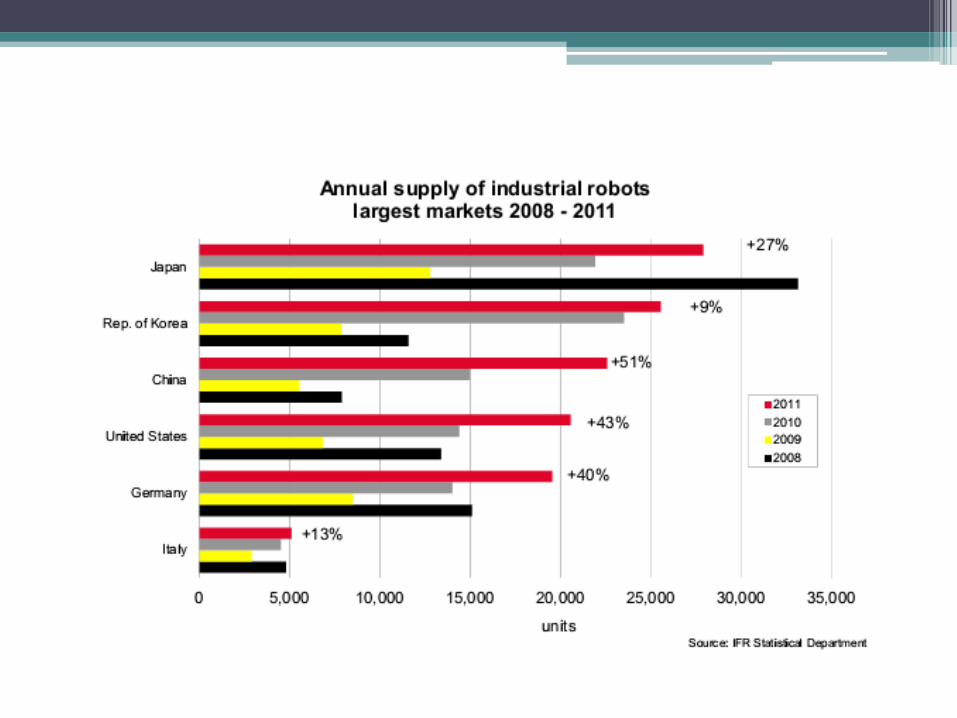
Mercado y Tendencias


Por lo visto...
• En la robótica se analizan y aplican conocimientos de diversas disciplinas:
▫ Mecánica
▫ Electrónica
▫ Informática
▫ Teoría de Control Automático
▫ Sensores
▫ Inteligencia Artificial
Pero antes de seleccionar un robot…
• Debemos tener en mente las siguientes reglas generales para la decisión del uso de un robot:
1. Las cuatros D de la robótica (Four Ds of Robotics), es decir, si la tarea es sucia (Dirty), aburrida (Dull), peligrosa (Dangerous) o difícil (Difficult).
2. No se debe dejar a un humano sin trabajo o desempleado.
3. Preguntarse, ¿es posible encontrar personas dispuestas a realizar el trabajo?.
4. El uso de los robots debe tener beneficios económicos a corto y mediano plazo.

Selección de robots • Características geométricas
▫ Número de grados de libertad
▫ Volumen de trabajo
▫ Resolución, precisión y repetibilidad
▫ Calidad de seguimiento de trayectorias
• Características cinemáticas
▫ Velocidad máxima y mínima
▫ Aceleración/deceleración
• Características dinámicas
▫ Fuerza de agarre
▫ Carga máxima
▫ Control de fuerza/par
▫ Frecuencia de resonancia
• Tipo de movimientos
▫ Punto a punto
▫ Coordinado
▫ Continuo
• Tipo de programación
▫ Enseñanza,
▫ Guiado,
▫ Textual
• Tipo de energía
▫ Hidráulico
▫ Neumático
▫ Eléctrico
• Comunicaciones
▫ E/S digitales/analógicas
▫ Serie/paralelo/redes
• Coste y servicio