analogica control pid
TRANSCRIPT
Introducción
En cualquier sistema de control existe una señal de control que elcontrolador tendrá que generar a partir de la señal de error. Y en lamayoría de los casos bastará con la utilización de un control tipo PID. Siel lazo de control se implementa de forma analógica es necesarioimplementar dichas acciones con la ayuda de circuitos electrónicos conOPAMs. Los controladores PID esta entre el valor medido y el valor quese quiere obtener calculando dando así una acción correctora.
Hoy en día no es tan habitual este hecho, pues en muchos casos laimplementación del control se realiza en un dispositivo digital y no seránecesario construir físicamente los circuitos analógicos que se van aexplicar a continuación. Pero como en algunos casos el control podrá seranalógico.

Características de los P,I,D
- El controlador proporcional (kp) reducirá el tiempo de elevación yreducirá, pero jamás eliminar el error de estado estacionario.
- El controlador integral (ki) tendrá el efecto de eliminar el error deestado estacionario pero puede empeorar la respuesta transitoria.
- El controlador derivativo (kd) tendrá como objetivo elevar laestabilidad al sistema eliminando el sobre pico y mejorando elestado transitorio.
- Estas características en un circuito a lazo cerrado
Tipos de acciones de control
- Hay tres tipos de controladores ;
- Tipo proporcional
- Tipo integral
- Tipo derivativo
- Todos estos tres controladores están respecto al error e(t)

Control Proporcional (P)
El circuito proporcional tendrá efecto sobre el error estable solo si elerror varia con respeto al tiempo, para hacer que varié con respecto altiempo tenemos la parte derivativa y la integral, la ventaja del circuitoproporcional es que atenúa el ruido en grandes frecuencias tenemos;
- Mejora el margen de ganancia- En la implementación de un circuito puede necesitar un capacitor
muy grande.
La parte proporcional consiste en el producto entre la señal de error yla constante proporcional para lograr que el error en estadoestacionario se aproxime a cero, pero en la mayoría de los casos, estosvalores solo serán óptimos en una determinada porción del rango totalde control, siendo distintos los valores óptimos para cada porción delrango.
La fórmula del proporcional esta dada por:
Sin embargo, existe también un valor límite en la constante proporcional apartir del cual, en algunos casos, el sistema alcanza valores superiores a losdeseados. Este fenómeno se llama sobre oscilación y, por razones de seguridad,no debe sobrepasar el 30%, aunque es conveniente que la parte proporcional .ni siquiera produzca sobre oscilación.

Proporcional
Control Proporcional (P)
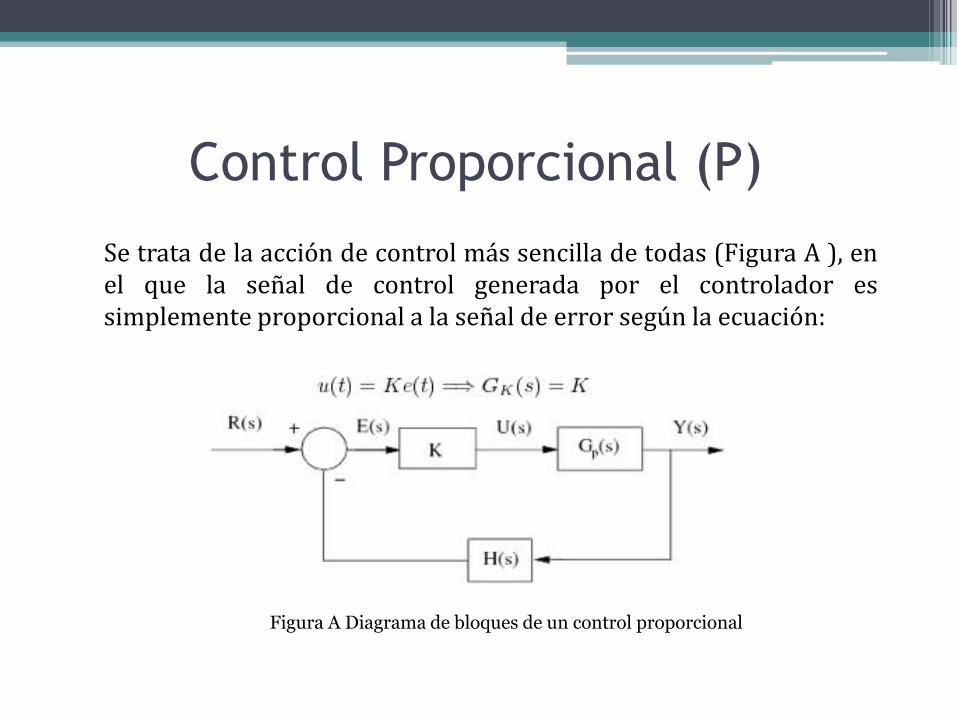
Se trata de la acción de control más sencilla de todas (Figura A ), enel que la señal de control generada por el controlador essimplemente proporcional a la señal de error según la ecuación:
Figura A Diagrama de bloques de un control proporcional
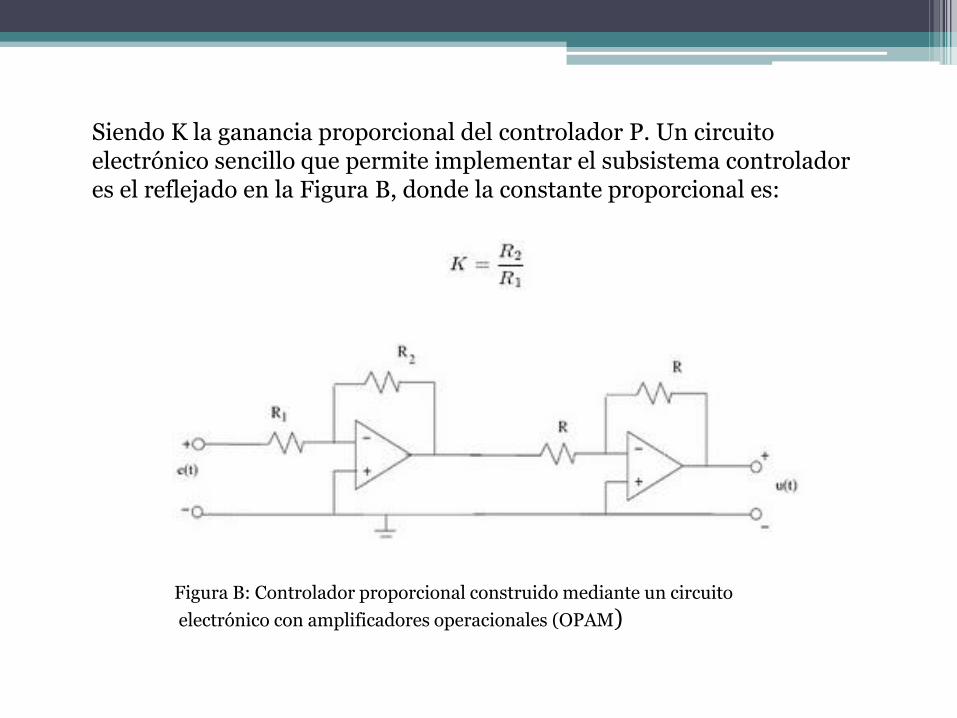
Siendo K la ganancia proporcional del controlador P. Un circuito electrónico sencillo que permite implementar el subsistema controlador es el reflejado en la Figura B, donde la constante proporcional es:
Figura B: Controlador proporcional construido mediante un circuito
electrónico con amplificadores operacionales (OPAM)

CIRCUITO PROPORCIONAL
Derivativo
La acción derivativa se manifiesta cuando hay un cambio en el valor absoluto del error; (si el error es constante, solamente actúan los modos proporcional e integral).
La función de la acción derivativa es mantener el error al mínimo corrigiéndolo proporcionalmente con la misma velocidad que se produce; de esta manera evita que el error se incremente.
Se deriva con respecto al tiempo y se multiplica por una constante D y luego se suma a las señales anteriores (P+I). Es importante adaptar la respuesta de control a los cambios en el sistema ya que una mayor derivativa corresponde a un cambio más rápido y el controlador puede responder acordemente.
La fórmula del derivativo esta dada por

Derivativo

Control Proporcional derivativo (PD)Se puede mejorar el comportamiento del sistema realimentado si a la acción de control del regulador proporcional se le añade una acción que derive la señal de error (Figura C ). Así se obtiene el controlador proporcional-derivativo (PD). La ecuación que rige su funcionamiento es:
Figura C; Diagrama de bloques de un sistema con controlproporcional-derivativo (PD)

donde K es la ganancia de la acción proporcional, y Td = Kd ∕ K la constante de tiempo de la acción derivativa, o constante derivativa.
Figura D:Controladores proporcional-derivativo construidos mediante circuitos electrónicos con amplificadores operacionales (OPAM)
En la Figura D se muestran dos circuitos que reproducen un controlador PD. En el primero de ellos las constantes del controlador son:
y en el segundo:
La ventaja del primer circuito es que se necesita un OPAM menospara su construcción, y la del segundo es que permite una selecciónindependiente de las constantes proporcional y derivativa. Así, en elprimer circuito una constante derivativa grande supone la utilizaciónde un condensador C1 de valor grande.
Sin embargo, en el segundo se puede conseguir el mismo efecto conuna adecuada selección tanto del condensador Cd como de laresistencia Rd, pudiendo escoger valores más realistas de los dos.
Si se utiliza como controlador el primero de los ejemplos de la FiguraD, según sea el caso, podría requerirse un capacitor demasiadogrande.
Circuito Integral
El modo de control Integral tiene como propósito disminuir y eliminar elerror en estado estacionario, provocado por el modo proporcional. Elcontrol integral actúa cuando hay una desviación entre la variable y elpunto de consigna, integrando esta desviación en el tiempo y sumándolaa la acción proporcional. El error es integrado, lo cual tiene la funciónde promediarlo o sumarlo por un período determinado; Luego esmultiplicado por una constante I. Posteriormente, la respuesta integral esadicionada al modo Proporcional para formar el control P + I con elpropósito de obtener una respuesta estable del sistema sin errorestacionario.
La fórmula del integral está dada por
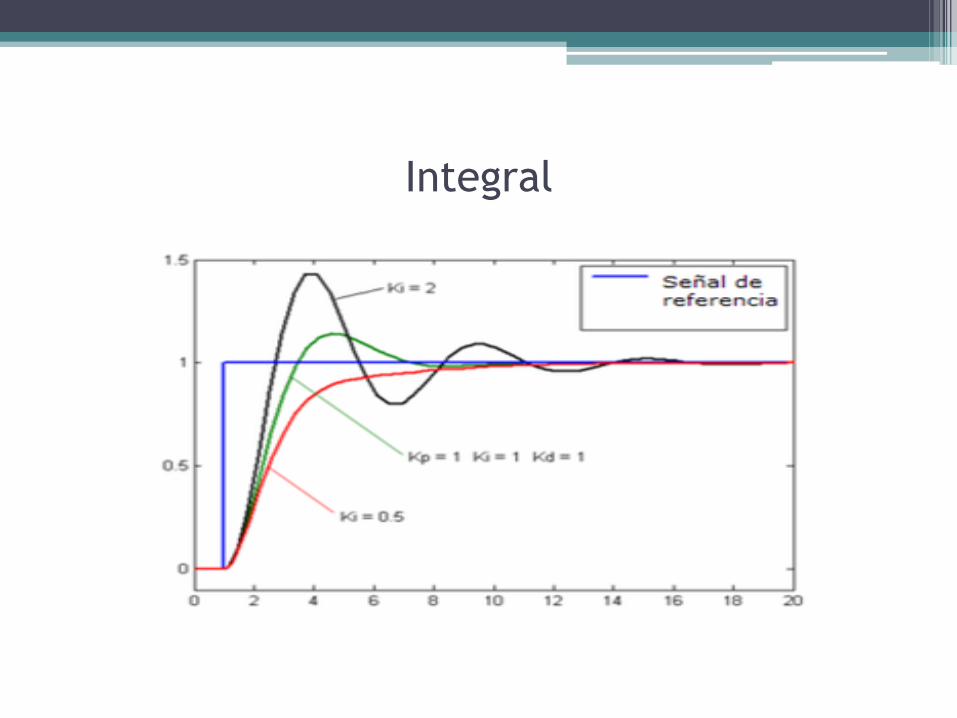
Integral

Circuito Integral
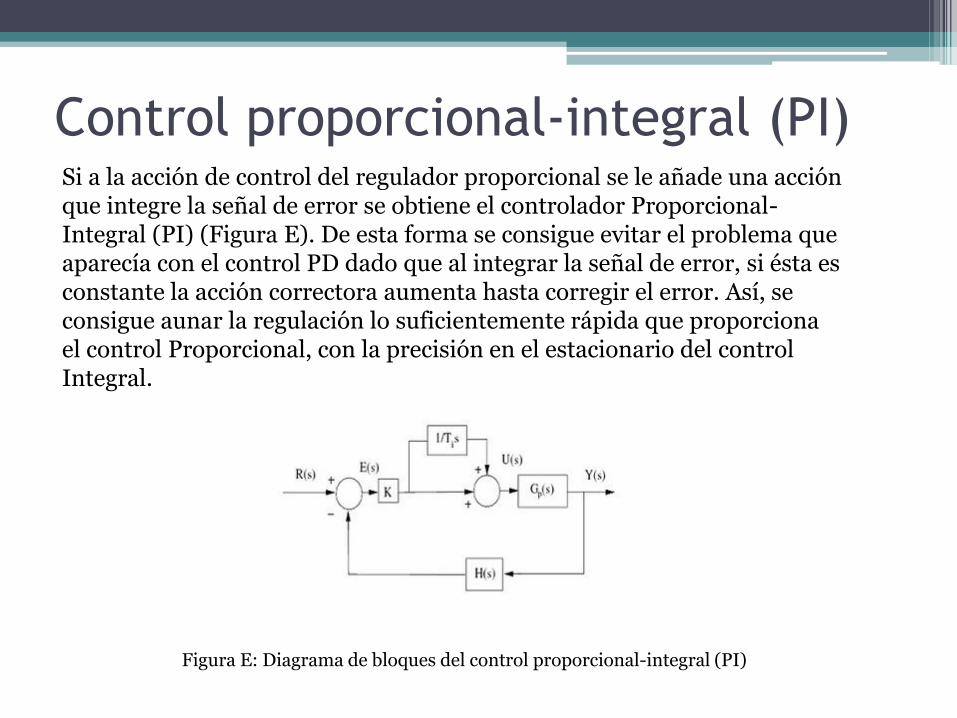
Control proporcional-integral (PI)Si a la acción de control del regulador proporcional se le añade una acción que integre la señal de error se obtiene el controlador Proporcional-Integral (PI) (Figura E). De esta forma se consigue evitar el problema que aparecía con el control PD dado que al integrar la señal de error, si ésta es constante la acción correctora aumenta hasta corregir el error. Así, se consigue aunar la regulación lo suficientemente rápida que proporciona el control Proporcional, con la precisión en el estacionario del control Integral.
Figura E: Diagrama de bloques del control proporcional-integral (PI)
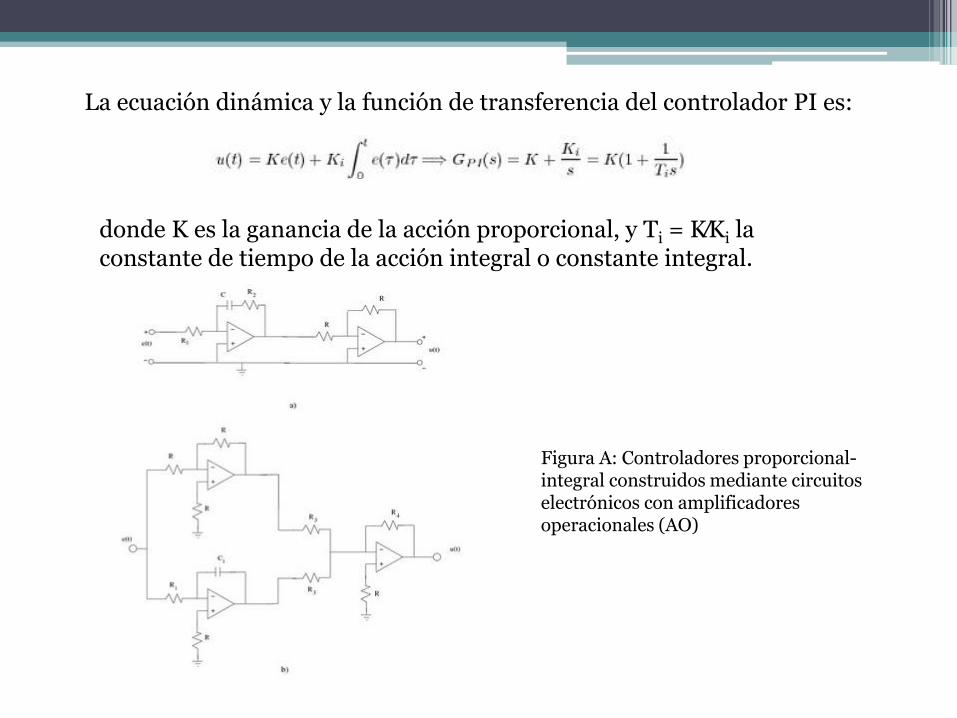
La ecuación dinámica y la función de transferencia del controlador PI es:
donde K es la ganancia de la acción proporcional, y Ti = K∕Ki la constante de tiempo de la acción integral o constante integral.
Figura A: Controladores proporcional-integral construidos mediante circuitos electrónicos con amplificadores operacionales (AO)

Si se utiliza el primero de los circuitos de la Figura A como controlador PI, las constantes del controlador serían:
y si se escoge el segundo:
Las ventajas de uno u otro son las mismas que las de loscontroladores PD implementados.Como en el caso del control PD implementado de forma analógica esnecesario recordar que:El problema de seleccionar una combinación adecuada de lasconstantes integral y proporcional para que el capacitor delcontrolador no sea excesivamente grande, es más agudo que en elcaso del controlador PD.

Control PIDSi se reúnen las tres acciones básicas de control, esto es, se genera la señal de control a partir de una combinación lineal de la señal de error, su derivada y su integral, se obtiene el controlador más general, el proporcional-integral-derivativo (PID), que consigue la rapidez de respuesta de su parte proporcional, la reducción del rebose de la parte derivativa, y la anulación del error estacionario de la parte integral. La ecuación diferencial y la función de transferencia del controlador PID sería:
donde K es la ganancia proporcional, y Td = Kd∕K y Ti = K∕Ki las constantes de tiempo de la acción derivativa e integral, respectivamente.
Control PID
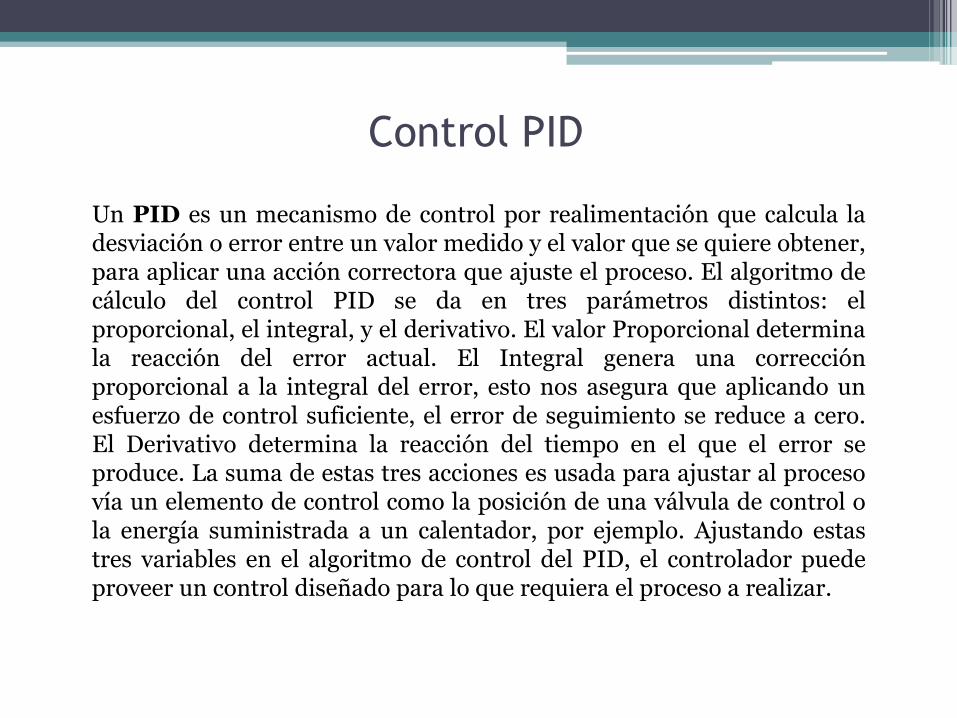
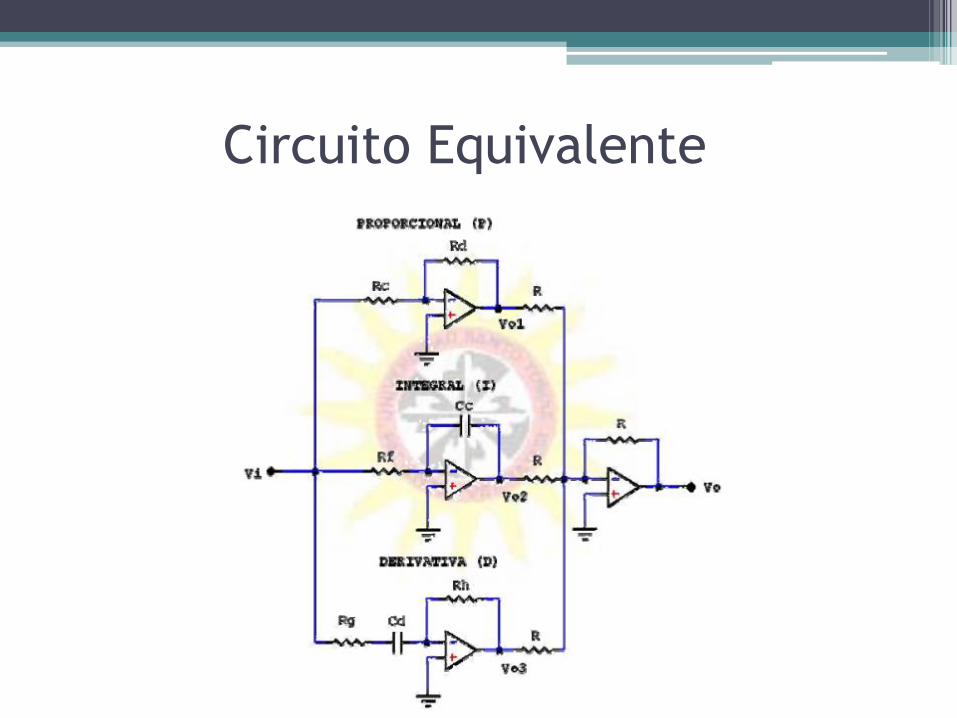
Un PID es un mecanismo de control por realimentación que calcula ladesviación o error entre un valor medido y el valor que se quiere obtener,para aplicar una acción correctora que ajuste el proceso. El algoritmo decálculo del control PID se da en tres parámetros distintos: elproporcional, el integral, y el derivativo. El valor Proporcional determinala reacción del error actual. El Integral genera una correcciónproporcional a la integral del error, esto nos asegura que aplicando unesfuerzo de control suficiente, el error de seguimiento se reduce a cero.El Derivativo determina la reacción del tiempo en el que el error seproduce. La suma de estas tres acciones es usada para ajustar al procesovía un elemento de control como la posición de una válvula de control ola energía suministrada a un calentador, por ejemplo. Ajustando estastres variables en el algoritmo de control del PID, el controlador puedeproveer un control diseñado para lo que requiera el proceso a realizar.
Circuito Equivalente
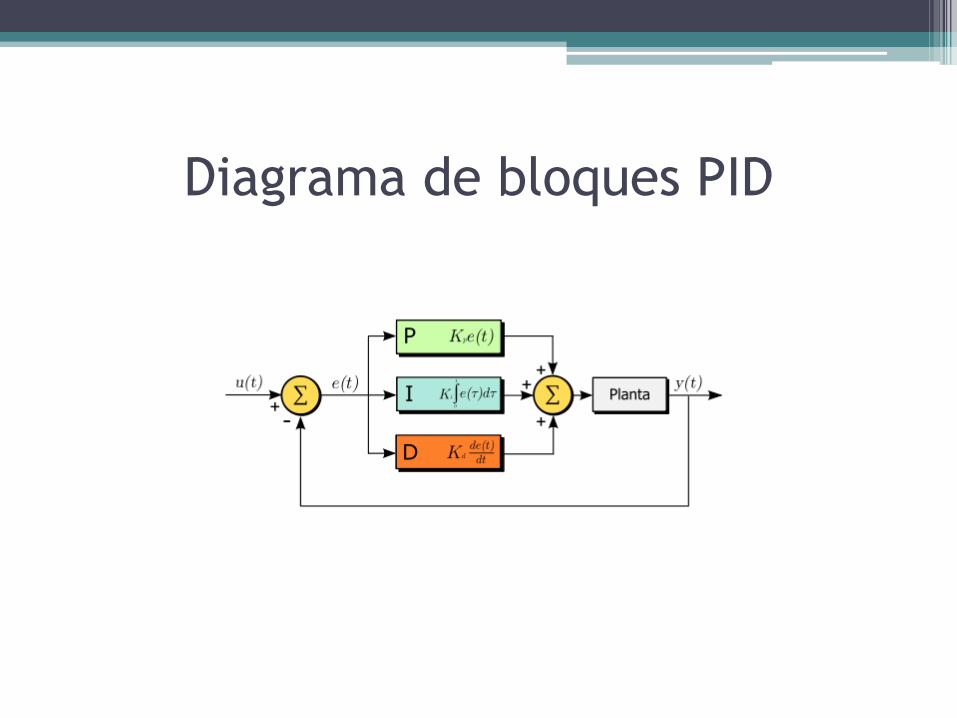
Diagrama de bloques PID

Función de transferencia de un PID

Figura A1.11: Controlador proporcional-integral-derivativo construido mediante un circuito electrónico con amplificadores operacionales (OPAM)
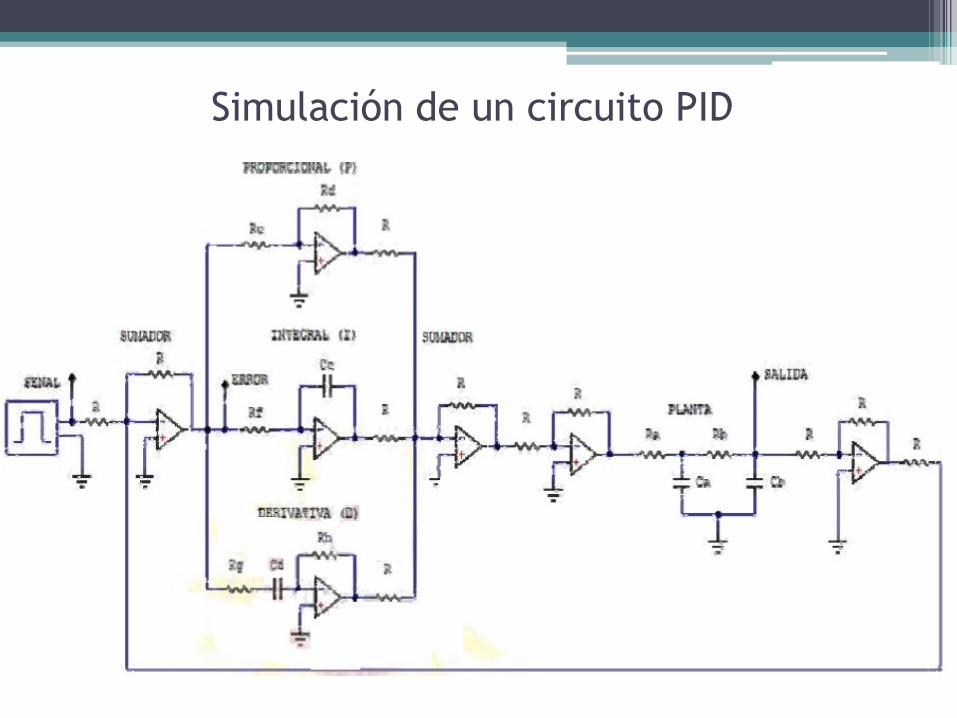
Simulación de un circuito PID
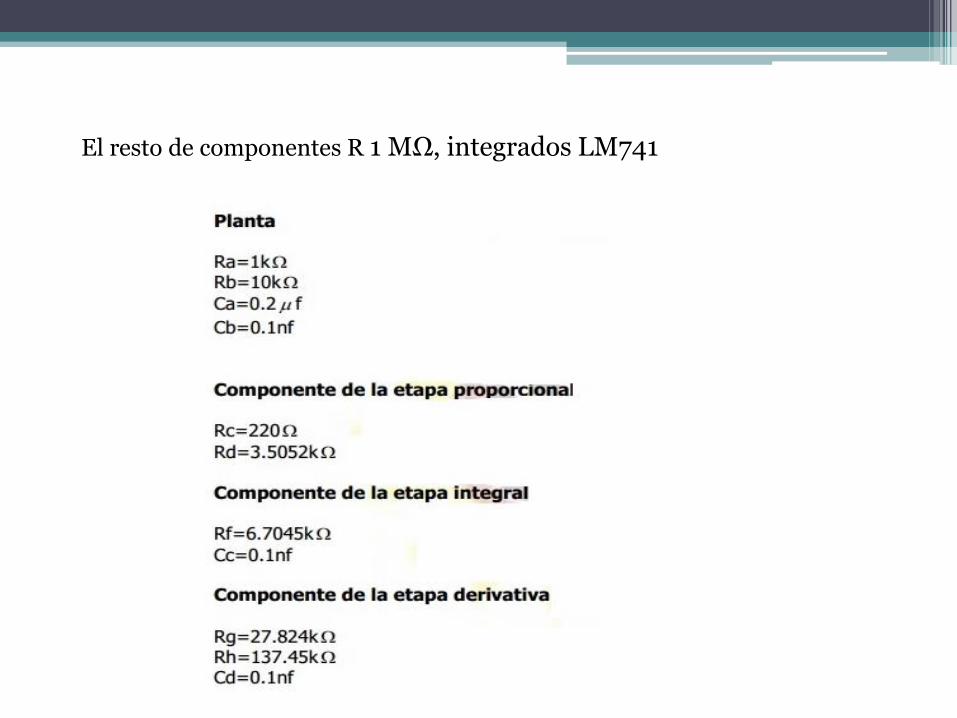
El resto de componentes R 1 MΩ, integrados LM741
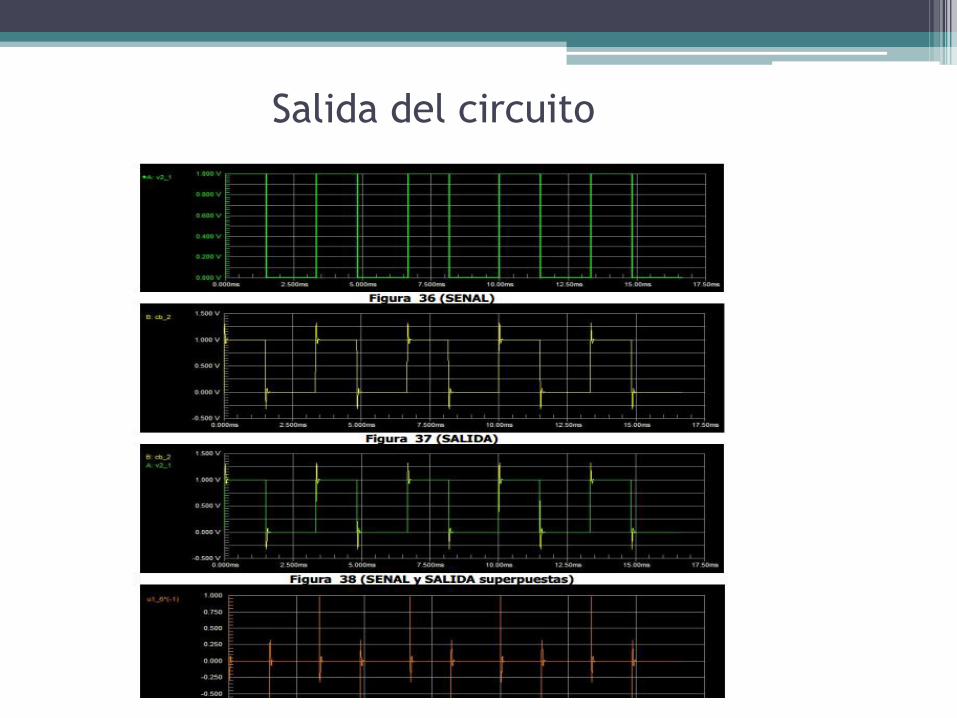
Salida del circuito
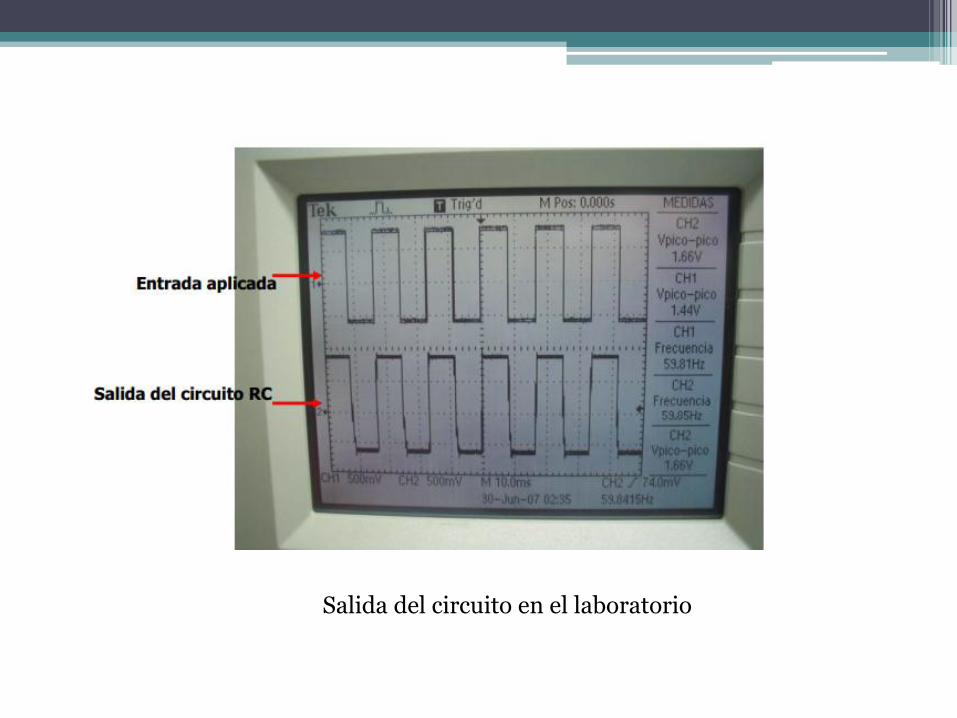
Salida del circuito en el laboratorio
AplicacionesUn ejemplo muy sencillo que ilustra la funcionalidad básica de un PID es cuando unapersona entra a una ducha. Inicialmente abre la llave de agua caliente para aumentar latemperatura hasta un valor aceptable (también llamado "Setpoint"). El problema es quepuede llegar el momento en que la temperatura del agua sobrepase este valor así que lapersona tiene que abrir un poco la llave de agua fría para contrarrestar el calor ymantener el balance.
El agua fría es ajustada hasta llegar a la temperatura deseada. En este caso, el humanoes el que está ejerciendo el control sobre el lazo de control, y es el que toma lasdecisiones de abrir o cerrar alguna de las llaves; pero no sería ideal si en lugar denosotros, fuera una máquina la que tomara las decisiones y mantuviera la temperaturaque deseamos?
Esta es la razón por la cual los lazos PID fueron inventados. Para simplificar las laboresde los operadores y ejercer un mejor control sobre las operaciones. Algunas de lasaplicaciones más comunes son:Lazos de Temperatura (Aire acondicionado, Calentadores, Refrigeradores, etc.)Lazos de Nivel (Nivel en tanques de líquidos como agua, lácteos, mezclas, crudo, etc.)Lazos de Presión (para mantener una presión predeterminada en tanques, tubos,recipientes, etc.)Lazos de Flujo (mantienen la cantidad de flujo dentro de una línea o tubo)

Conclusiones