algebra lineal unidad 4 y 5
TRANSCRIPT
INSTITUTO TECNOLOacuteGICO SUPERIOR DE TIERRA
BLANCA
AacuteLGEBRA LINEAL
UNIDAD 4 ESPACIOS VECTORIALES
Y
UNIDAD 5 TRANSFORMACIONES LINEALES
ING ELIAQUIM BLANCO VAZQUEZ
INTEGRANTES
JUAN MERINO LUNA
DEHIRO BRAVO SANCHEZ
YERALDY TOLEDO CASTILLO
ALEJANDRA RONQUILLO ROJAS
ARMANDO BELTRAacuteN ESPEJO
MAXIMILIANO FERNAacuteNDEZ TORES
ISAI ALAN CUATETA ROJAS
VICTOR PAXTIAN VELASCO
JOSE DE JESUS AVENDANtildeO MAZA
JOSE ERNESTO CASTRO CHAVEZ
TIERRA BLANCA VERACRUZ A 20 DE JUNIO DE 2012
UNIDAD 4 ESPACIOS VECTORIALES
41 DEFINICION DE ESPACIO VECTORIAL
Un espacio vectorial real V es un conjunto de objetos denominados vectores junto con dos
operaciones binarias llamadas suma y multiplicacioacuten por un escalar
42 DEFINICIOacuteN DE SUBESPACIO VECTORIAL Y SUS PROPIEDADES Sea H un subconjunto no vaciacuteo de un espacio vectorial V y suponga que H es en siacute un
espacio vectorial bajo las operaciones de suma y multiplicacioacuten por un escalar definidas en
V Entonces se dice que H es un subespacio de V
Se puede decir que el subespacio H hereda las operaciones del espacio vectorial ldquopadrerdquo V
TEOREMA 1
Un subconjunto no vacio H es un espacio vectorial V es un subespacio de V si se cumplen
las dos reglas de cerradura Este teorema demuestra que para probar si H es o no un
subespacio de V es suficiente verificar que
x + y y ax estaacuten en H cuando x y y estaacuten en H y a es un escalar
Lo anterior dice que
Todo subespacio de un espacio vectorial V contiene al 0
El subespacio trivial Para cualquier espacio vectorial V el subconjunto 0 que consiste en
el vector cero nada maacutes es un subespacio ya que 0+0= 0 y a0 = 0 para todo nuacutemero real a
TEOREMA 2
Sean H1 y H2 dos subespacios de un espacio vectorial V Entonces
H1 H2 es un subespacio de V
Definicioacuten de subespacio de un espacio vectorial y sus propiedades
Definicioacuten Sea H un subconjunto de un espacio vectorial V y supongamos que H es en siacute un espacio vectorial con las operaciones de suma y multiplicacioacuten escalar definidas sobre V Se dice entonces que H es un subespacio de V
Teorema Un subconjunto no vaciacuteo H de un espacio vectorial V es un subespacio de V si las dos reglas de cerradura valen
Reglas para verificar si un subconjunto es un subespacio
i Si x isin H y y isin H entonces x + y isin H
ii Si x isin H entonces αx isin H para todo escalar α
Demostracioacuten Para demostrar que H es un espcacio vectorial debemos verificar que los axiomas de los espacios vectoriales cumplen con las operaciones de la suma vectorial y multiplicacioacuten escalar definidas en V Las dos operaciones de cerradura se cumplen por hipoacutetesis Puesto que los vectores en H tambieacuten estaacuten en V las leyes asociativa conmutativa distributiva y la del neutro multiplicativo se satisfacen Ahora si x isin H entonces
0x isin H debido a la hipoacutetesis (ii) Pero por el teorema de espacios vectoriales (parte ii) 0x = 0 Consecuentemente 0 isin H y el axioma (iii) se cumple Finalmente de la parte (ii) tenemos
que (-1)x isin H para todo x isin H Por el teorema de espacios vectoriales (parte iv) -x = (-1)x isin H de tal forma que el axioma (iv) tambieacuten se cumple y con ello concluimos la demostracioacuten
Este teorema nos dice que para probar que H es un subespacio de V nos basta con verificar que
x + y y αx estaacuten en H siempre que x y y esteacuten en H y α sea un escalar
La demostracioacuten anterior contiene un resultado importante que debe mencionarse expliacutecitamente
Todo subespacio de un espacio vectorial V contiene al 0
Este resultado nos permitiraacute ver faacutecilmente si un subespacio particular V no es un espacio vectorial Esto es si un subconjunto no contiene al 0 entonces no es un subespacio
Ejemplo 1
Para todo espacio vectorial V el subconjunto |0| que contiene solamente el vector cero es un subespacio puesto que 0 +0 = 0 y α0 = 0 para todo nuacutemero real α se le conoce como el subespacio trivial
Ejemplo 2
V es un subespacio de siacute mismo para todo espacio vectorial V
43 COMBINACION LINEAL INDEPENDENCIA LINEAL DEFINICIOacuteN DE COMBINACIOacuteN LINEAL Sea (V + bull K) un espacio vectorial Se llama combinacioacuten lineal (cl) de los vectores v1v2hellipvp a todo vector de la forma
INDEPENDENCIA LINEAL
En el estudio del algebra lineal una de las ideas centrales es la de dependencia o
independencia lineal de los vectores En esta seccioacuten se define el significado de
independencia lineal y se muestra su relacioacuten con la teoriacutea de sistemas homogeacuteneos de
ecuaciones y determinantes
Existe una relacioacuten espacial entre los vectores
Se puede apreciar que v2=2v1 o si se escribe esta ecuacioacuten de otra manera 2v1-v2=0
44 BASE Y DIMENSION DE UN ESPACIO VECTORIAL CAMBIO DE BASE Se ha visto en R2 conviene escribir vectores como una combinacioacuten lineal de los vectores
En R3 se escribieron los vectores en teacuterminos
de Ahora se generalizara esta idea
BASEUn conjunto finito de vectores es una base para un espacio
vectorial V si Todo conjunto de n vectores linealmente independiente en Rn es una base en Rn
En Rn se define Puesto que los vectores e son las columnas d una matriz identidad (que tiene determinante
1) es un conjunto linealmente independiente y por lo tanto constituye una base en Rn Esta base especial se denomina base canonica en Rn Ahora se encontraran bases para otros espacios EJEMPLO base canonica para M22
Se vio que generan a
entonces es evidentemente que Asiacute estas cuatro matrices son linealmente independientes y forman una base para M22 lo que se denomina base canoniacuteca para M22
TEOREMA si es una base para V y si vIcircV entonces existe un conjunto
uacutenico de escalares tales que
Existe cuando menos un conjunto de dichos escalares porque genera a V suponga entonces que v se puede escribir e dos maneras como una combinacioacuten lineal de los vectores de la base Es decir suponga que
Sea dos bases para V debe demostrarse que m=n esto se prueba mostrando que si mgtn entonces S es un conjunto literalmente independiente lo que contradice la hipoacutetesis de que S es una base Esto demostrara que mlen la misma prueba demostrara que lem y esto prueba el teorema Asiacute basta demostrar que si mgtn entonces S es independiente Como S constituye una base todo u se puede
expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

UNIDAD 4 ESPACIOS VECTORIALES
41 DEFINICION DE ESPACIO VECTORIAL
Un espacio vectorial real V es un conjunto de objetos denominados vectores junto con dos
operaciones binarias llamadas suma y multiplicacioacuten por un escalar
42 DEFINICIOacuteN DE SUBESPACIO VECTORIAL Y SUS PROPIEDADES Sea H un subconjunto no vaciacuteo de un espacio vectorial V y suponga que H es en siacute un
espacio vectorial bajo las operaciones de suma y multiplicacioacuten por un escalar definidas en
V Entonces se dice que H es un subespacio de V
Se puede decir que el subespacio H hereda las operaciones del espacio vectorial ldquopadrerdquo V
TEOREMA 1
Un subconjunto no vacio H es un espacio vectorial V es un subespacio de V si se cumplen
las dos reglas de cerradura Este teorema demuestra que para probar si H es o no un
subespacio de V es suficiente verificar que
x + y y ax estaacuten en H cuando x y y estaacuten en H y a es un escalar
Lo anterior dice que
Todo subespacio de un espacio vectorial V contiene al 0
El subespacio trivial Para cualquier espacio vectorial V el subconjunto 0 que consiste en
el vector cero nada maacutes es un subespacio ya que 0+0= 0 y a0 = 0 para todo nuacutemero real a
TEOREMA 2
Sean H1 y H2 dos subespacios de un espacio vectorial V Entonces
H1 H2 es un subespacio de V
Definicioacuten de subespacio de un espacio vectorial y sus propiedades
Definicioacuten Sea H un subconjunto de un espacio vectorial V y supongamos que H es en siacute un espacio vectorial con las operaciones de suma y multiplicacioacuten escalar definidas sobre V Se dice entonces que H es un subespacio de V
Teorema Un subconjunto no vaciacuteo H de un espacio vectorial V es un subespacio de V si las dos reglas de cerradura valen
Reglas para verificar si un subconjunto es un subespacio
i Si x isin H y y isin H entonces x + y isin H
ii Si x isin H entonces αx isin H para todo escalar α
Demostracioacuten Para demostrar que H es un espcacio vectorial debemos verificar que los axiomas de los espacios vectoriales cumplen con las operaciones de la suma vectorial y multiplicacioacuten escalar definidas en V Las dos operaciones de cerradura se cumplen por hipoacutetesis Puesto que los vectores en H tambieacuten estaacuten en V las leyes asociativa conmutativa distributiva y la del neutro multiplicativo se satisfacen Ahora si x isin H entonces
0x isin H debido a la hipoacutetesis (ii) Pero por el teorema de espacios vectoriales (parte ii) 0x = 0 Consecuentemente 0 isin H y el axioma (iii) se cumple Finalmente de la parte (ii) tenemos
que (-1)x isin H para todo x isin H Por el teorema de espacios vectoriales (parte iv) -x = (-1)x isin H de tal forma que el axioma (iv) tambieacuten se cumple y con ello concluimos la demostracioacuten
Este teorema nos dice que para probar que H es un subespacio de V nos basta con verificar que
x + y y αx estaacuten en H siempre que x y y esteacuten en H y α sea un escalar
La demostracioacuten anterior contiene un resultado importante que debe mencionarse expliacutecitamente
Todo subespacio de un espacio vectorial V contiene al 0
Este resultado nos permitiraacute ver faacutecilmente si un subespacio particular V no es un espacio vectorial Esto es si un subconjunto no contiene al 0 entonces no es un subespacio
Ejemplo 1
Para todo espacio vectorial V el subconjunto |0| que contiene solamente el vector cero es un subespacio puesto que 0 +0 = 0 y α0 = 0 para todo nuacutemero real α se le conoce como el subespacio trivial
Ejemplo 2
V es un subespacio de siacute mismo para todo espacio vectorial V
43 COMBINACION LINEAL INDEPENDENCIA LINEAL DEFINICIOacuteN DE COMBINACIOacuteN LINEAL Sea (V + bull K) un espacio vectorial Se llama combinacioacuten lineal (cl) de los vectores v1v2hellipvp a todo vector de la forma
INDEPENDENCIA LINEAL
En el estudio del algebra lineal una de las ideas centrales es la de dependencia o
independencia lineal de los vectores En esta seccioacuten se define el significado de
independencia lineal y se muestra su relacioacuten con la teoriacutea de sistemas homogeacuteneos de
ecuaciones y determinantes
Existe una relacioacuten espacial entre los vectores
Se puede apreciar que v2=2v1 o si se escribe esta ecuacioacuten de otra manera 2v1-v2=0
44 BASE Y DIMENSION DE UN ESPACIO VECTORIAL CAMBIO DE BASE Se ha visto en R2 conviene escribir vectores como una combinacioacuten lineal de los vectores
En R3 se escribieron los vectores en teacuterminos
de Ahora se generalizara esta idea
BASEUn conjunto finito de vectores es una base para un espacio
vectorial V si Todo conjunto de n vectores linealmente independiente en Rn es una base en Rn
En Rn se define Puesto que los vectores e son las columnas d una matriz identidad (que tiene determinante
1) es un conjunto linealmente independiente y por lo tanto constituye una base en Rn Esta base especial se denomina base canonica en Rn Ahora se encontraran bases para otros espacios EJEMPLO base canonica para M22
Se vio que generan a
entonces es evidentemente que Asiacute estas cuatro matrices son linealmente independientes y forman una base para M22 lo que se denomina base canoniacuteca para M22
TEOREMA si es una base para V y si vIcircV entonces existe un conjunto
uacutenico de escalares tales que
Existe cuando menos un conjunto de dichos escalares porque genera a V suponga entonces que v se puede escribir e dos maneras como una combinacioacuten lineal de los vectores de la base Es decir suponga que
Sea dos bases para V debe demostrarse que m=n esto se prueba mostrando que si mgtn entonces S es un conjunto literalmente independiente lo que contradice la hipoacutetesis de que S es una base Esto demostrara que mlen la misma prueba demostrara que lem y esto prueba el teorema Asiacute basta demostrar que si mgtn entonces S es independiente Como S constituye una base todo u se puede
expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
Reglas para verificar si un subconjunto es un subespacio
i Si x isin H y y isin H entonces x + y isin H
ii Si x isin H entonces αx isin H para todo escalar α
Demostracioacuten Para demostrar que H es un espcacio vectorial debemos verificar que los axiomas de los espacios vectoriales cumplen con las operaciones de la suma vectorial y multiplicacioacuten escalar definidas en V Las dos operaciones de cerradura se cumplen por hipoacutetesis Puesto que los vectores en H tambieacuten estaacuten en V las leyes asociativa conmutativa distributiva y la del neutro multiplicativo se satisfacen Ahora si x isin H entonces
0x isin H debido a la hipoacutetesis (ii) Pero por el teorema de espacios vectoriales (parte ii) 0x = 0 Consecuentemente 0 isin H y el axioma (iii) se cumple Finalmente de la parte (ii) tenemos
que (-1)x isin H para todo x isin H Por el teorema de espacios vectoriales (parte iv) -x = (-1)x isin H de tal forma que el axioma (iv) tambieacuten se cumple y con ello concluimos la demostracioacuten
Este teorema nos dice que para probar que H es un subespacio de V nos basta con verificar que
x + y y αx estaacuten en H siempre que x y y esteacuten en H y α sea un escalar
La demostracioacuten anterior contiene un resultado importante que debe mencionarse expliacutecitamente
Todo subespacio de un espacio vectorial V contiene al 0
Este resultado nos permitiraacute ver faacutecilmente si un subespacio particular V no es un espacio vectorial Esto es si un subconjunto no contiene al 0 entonces no es un subespacio
Ejemplo 1
Para todo espacio vectorial V el subconjunto |0| que contiene solamente el vector cero es un subespacio puesto que 0 +0 = 0 y α0 = 0 para todo nuacutemero real α se le conoce como el subespacio trivial
Ejemplo 2
V es un subespacio de siacute mismo para todo espacio vectorial V
43 COMBINACION LINEAL INDEPENDENCIA LINEAL DEFINICIOacuteN DE COMBINACIOacuteN LINEAL Sea (V + bull K) un espacio vectorial Se llama combinacioacuten lineal (cl) de los vectores v1v2hellipvp a todo vector de la forma
INDEPENDENCIA LINEAL
En el estudio del algebra lineal una de las ideas centrales es la de dependencia o
independencia lineal de los vectores En esta seccioacuten se define el significado de
independencia lineal y se muestra su relacioacuten con la teoriacutea de sistemas homogeacuteneos de
ecuaciones y determinantes
Existe una relacioacuten espacial entre los vectores
Se puede apreciar que v2=2v1 o si se escribe esta ecuacioacuten de otra manera 2v1-v2=0
44 BASE Y DIMENSION DE UN ESPACIO VECTORIAL CAMBIO DE BASE Se ha visto en R2 conviene escribir vectores como una combinacioacuten lineal de los vectores
En R3 se escribieron los vectores en teacuterminos
de Ahora se generalizara esta idea
BASEUn conjunto finito de vectores es una base para un espacio
vectorial V si Todo conjunto de n vectores linealmente independiente en Rn es una base en Rn
En Rn se define Puesto que los vectores e son las columnas d una matriz identidad (que tiene determinante
1) es un conjunto linealmente independiente y por lo tanto constituye una base en Rn Esta base especial se denomina base canonica en Rn Ahora se encontraran bases para otros espacios EJEMPLO base canonica para M22
Se vio que generan a
entonces es evidentemente que Asiacute estas cuatro matrices son linealmente independientes y forman una base para M22 lo que se denomina base canoniacuteca para M22
TEOREMA si es una base para V y si vIcircV entonces existe un conjunto
uacutenico de escalares tales que
Existe cuando menos un conjunto de dichos escalares porque genera a V suponga entonces que v se puede escribir e dos maneras como una combinacioacuten lineal de los vectores de la base Es decir suponga que
Sea dos bases para V debe demostrarse que m=n esto se prueba mostrando que si mgtn entonces S es un conjunto literalmente independiente lo que contradice la hipoacutetesis de que S es una base Esto demostrara que mlen la misma prueba demostrara que lem y esto prueba el teorema Asiacute basta demostrar que si mgtn entonces S es independiente Como S constituye una base todo u se puede
expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

43 COMBINACION LINEAL INDEPENDENCIA LINEAL DEFINICIOacuteN DE COMBINACIOacuteN LINEAL Sea (V + bull K) un espacio vectorial Se llama combinacioacuten lineal (cl) de los vectores v1v2hellipvp a todo vector de la forma
INDEPENDENCIA LINEAL
En el estudio del algebra lineal una de las ideas centrales es la de dependencia o
independencia lineal de los vectores En esta seccioacuten se define el significado de
independencia lineal y se muestra su relacioacuten con la teoriacutea de sistemas homogeacuteneos de
ecuaciones y determinantes
Existe una relacioacuten espacial entre los vectores
Se puede apreciar que v2=2v1 o si se escribe esta ecuacioacuten de otra manera 2v1-v2=0
44 BASE Y DIMENSION DE UN ESPACIO VECTORIAL CAMBIO DE BASE Se ha visto en R2 conviene escribir vectores como una combinacioacuten lineal de los vectores
En R3 se escribieron los vectores en teacuterminos
de Ahora se generalizara esta idea
BASEUn conjunto finito de vectores es una base para un espacio
vectorial V si Todo conjunto de n vectores linealmente independiente en Rn es una base en Rn
En Rn se define Puesto que los vectores e son las columnas d una matriz identidad (que tiene determinante
1) es un conjunto linealmente independiente y por lo tanto constituye una base en Rn Esta base especial se denomina base canonica en Rn Ahora se encontraran bases para otros espacios EJEMPLO base canonica para M22
Se vio que generan a
entonces es evidentemente que Asiacute estas cuatro matrices son linealmente independientes y forman una base para M22 lo que se denomina base canoniacuteca para M22
TEOREMA si es una base para V y si vIcircV entonces existe un conjunto
uacutenico de escalares tales que
Existe cuando menos un conjunto de dichos escalares porque genera a V suponga entonces que v se puede escribir e dos maneras como una combinacioacuten lineal de los vectores de la base Es decir suponga que
Sea dos bases para V debe demostrarse que m=n esto se prueba mostrando que si mgtn entonces S es un conjunto literalmente independiente lo que contradice la hipoacutetesis de que S es una base Esto demostrara que mlen la misma prueba demostrara que lem y esto prueba el teorema Asiacute basta demostrar que si mgtn entonces S es independiente Como S constituye una base todo u se puede
expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
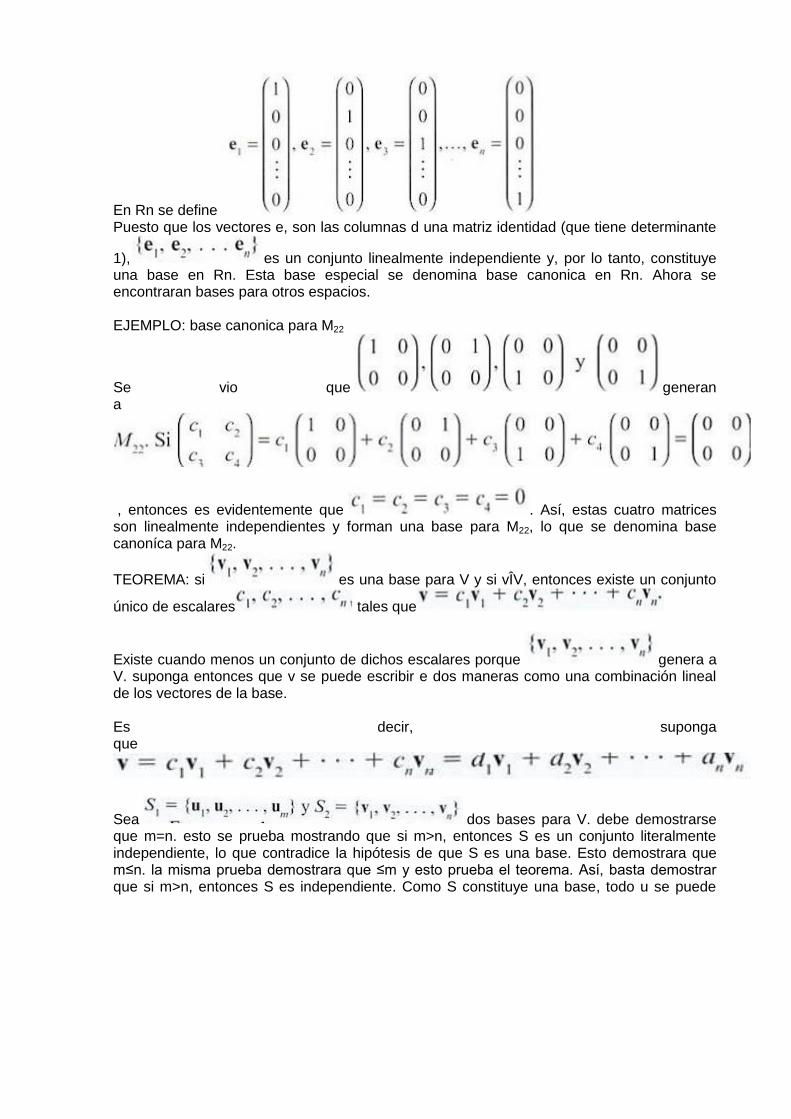
En Rn se define Puesto que los vectores e son las columnas d una matriz identidad (que tiene determinante
1) es un conjunto linealmente independiente y por lo tanto constituye una base en Rn Esta base especial se denomina base canonica en Rn Ahora se encontraran bases para otros espacios EJEMPLO base canonica para M22
Se vio que generan a
entonces es evidentemente que Asiacute estas cuatro matrices son linealmente independientes y forman una base para M22 lo que se denomina base canoniacuteca para M22
TEOREMA si es una base para V y si vIcircV entonces existe un conjunto
uacutenico de escalares tales que
Existe cuando menos un conjunto de dichos escalares porque genera a V suponga entonces que v se puede escribir e dos maneras como una combinacioacuten lineal de los vectores de la base Es decir suponga que
Sea dos bases para V debe demostrarse que m=n esto se prueba mostrando que si mgtn entonces S es un conjunto literalmente independiente lo que contradice la hipoacutetesis de que S es una base Esto demostrara que mlen la misma prueba demostrara que lem y esto prueba el teorema Asiacute basta demostrar que si mgtn entonces S es independiente Como S constituye una base todo u se puede
expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

expresar como una combinacioacuten lineal de las v se tiene
TEOREMA suponga que dimV=n si
Entonces restando se obtiene la ecuacioacutenpero como los v son linealmente independientes esta ecuacioacuten se cumple si y solo
si
Asiacute y el teorema queda demostrado
TEOREMA si son bases en un espacio vectorial V entonces m=n es decir cualesquiera dos bases en un espacio vectorial V tienen el mismo nuacutemero de vectores Para demostrar que S es dependiente deben encontrarse escalares
no todos cero tales que (2) Sustituyendo (1) en (2) se obtiene (3)
La ecuacioacuten (3) se puede reescribir como
Pero como son linealmente independientes se debe tener
(5)
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
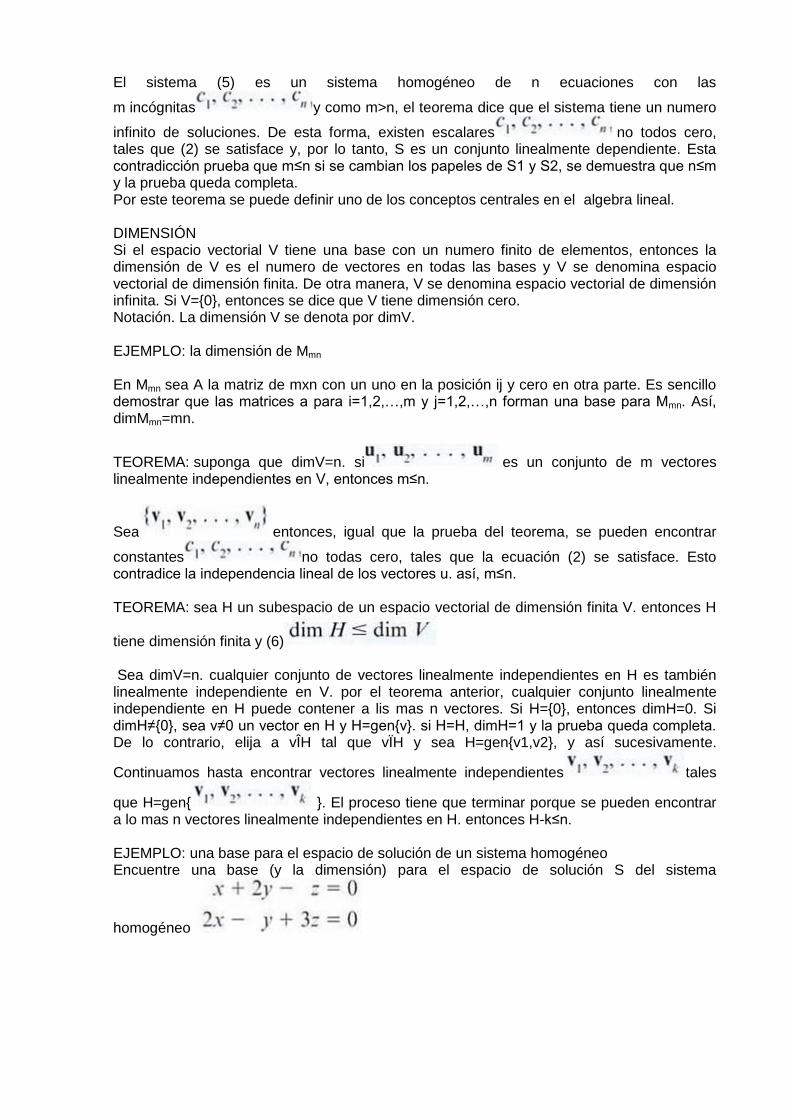
El sistema (5) es un sistema homogeacuteneo de n ecuaciones con las
m incoacutegnitas y como mgtn el teorema dice que el sistema tiene un numero
infinito de soluciones De esta forma existen escalares no todos cero tales que (2) se satisface y por lo tanto S es un conjunto linealmente dependiente Esta contradiccioacuten prueba que mlen si se cambian los papeles de S1 y S2 se demuestra que nlem y la prueba queda completa Por este teorema se puede definir uno de los conceptos centrales en el algebra lineal DIMENSIOacuteN Si el espacio vectorial V tiene una base con un numero finito de elementos entonces la dimensioacuten de V es el numero de vectores en todas las bases y V se denomina espacio vectorial de dimensioacuten finita De otra manera V se denomina espacio vectorial de dimensioacuten infinita Si V=0 entonces se dice que V tiene dimensioacuten cero Notacioacuten La dimensioacuten V se denota por dimV EJEMPLO la dimensioacuten de Mmn
En Mmn sea A la matriz de mxn con un uno en la posicioacuten ij y cero en otra parte Es sencillo demostrar que las matrices a para i=12hellipm y j=12hellipn forman una base para Mmn Asiacute dimMmn=mn
TEOREMA suponga que dimV=n si es un conjunto de m vectores linealmente independientes en V entonces mlen
Sea entonces igual que la prueba del teorema se pueden encontrar
constantes no todas cero tales que la ecuacioacuten (2) se satisface Esto contradice la independencia lineal de los vectores u asiacute mlen TEOREMA sea H un subespacio de un espacio vectorial de dimensioacuten finita V entonces H
tiene dimensioacuten finita y (6) Sea dimV=n cualquier conjunto de vectores linealmente independientes en H es tambieacuten linealmente independiente en V por el teorema anterior cualquier conjunto linealmente independiente en H puede contener a lis mas n vectores Si H=0 entonces dimH=0 Si dimHne0 sea vne0 un vector en H y H=genv si H=H dimH=1 y la prueba queda completa De lo contrario elija a vIcircH tal que vIumlH y sea H=genv1v2 y asiacute sucesivamente
Continuamos hasta encontrar vectores linealmente independientes tales
que H=gen El proceso tiene que terminar porque se pueden encontrar a lo mas n vectores linealmente independientes en H entonces H-klen EJEMPLO una base para el espacio de solucioacuten de un sistema homogeacuteneo Encuentre una base (y la dimensioacuten) para el espacio de solucioacuten S del sistema
homogeacuteneo
SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

SOLUCIOacuteN aquiacute Como A es una matriz de 2x3 S es un subespacio de R3 Reduciendo por renglones se encuentra sucesivamente
Entonces y=z y x=-z de manera que todas las soluciones son de la forma Asiacutees una base para S y dimS=1 Obseacutervese que S es el conjunto de vectores que se encuentran en la recta x=-t y=t z=t TEOREMA cualquier conjunto de n vectores linealmente independientes en eun espacio vectorial V de dimensioacuten n constituyen una base apara V
Sean n vectores Si generan el espacio V entonces constituyen una
base De lo contrario existe un vector uIcircV tal que uIumlgen Esto significa
que los n+1 vectores u donde linealmente independientes Para ver
esto observe que si (8)
Entonces porque de lo contrario podriacuteamos escribir u como una combinacioacuten
lineal de dividiendo la ecuacioacuten (8) entre y poniendo todos los
teacuterminos excepto u en el lado derecho Pero si entonces (8)
es
Lo que significa que ya que los v son linealmente
independientes Ahora sea W=gen u como todos los vectores entre las
llaves estaacuten en V W es un subespacio de V como u son linealmente independientes forman una base para W y dimW=n+1 Pero por el teorema dimWlen esta
contradiccioacuten muestra que no existe el vector uIcircV tal que uIumlgen
Asiacute genera a V y por lo tanto constituye una base para V CAMBIO DE BASE
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
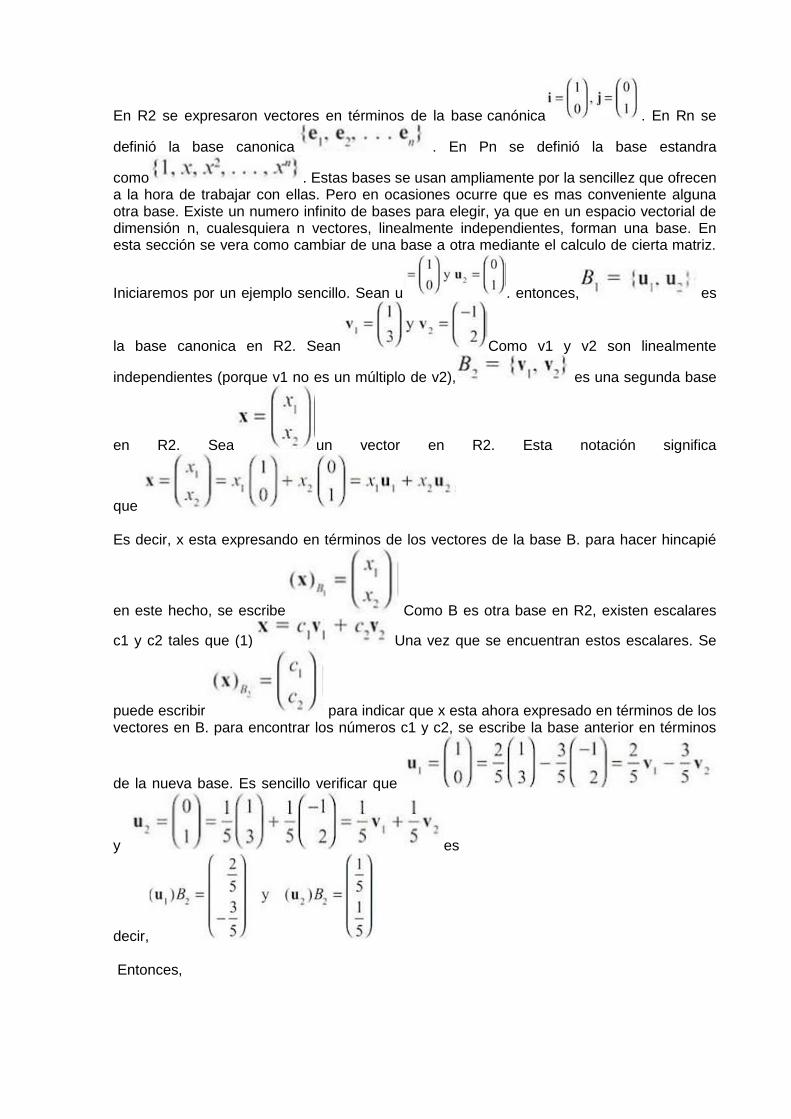
En R2 se expresaron vectores en teacuterminos de la base canoacutenica En Rn se
definioacute la base canonica En Pn se definioacute la base estandra
como Estas bases se usan ampliamente por la sencillez que ofrecen a la hora de trabajar con ellas Pero en ocasiones ocurre que es mas conveniente alguna otra base Existe un numero infinito de bases para elegir ya que en un espacio vectorial de dimensioacuten n cualesquiera n vectores linealmente independientes forman una base En esta seccioacuten se vera como cambiar de una base a otra mediante el calculo de cierta matriz
Iniciaremos por un ejemplo sencillo Sean u entonces es
la base canonica en R2 Sean Como v1 y v2 son linealmente
independientes (porque v1 no es un muacuteltiplo de v2) es una segunda base
en R2 Sea un vector en R2 Esta notacioacuten significa
que Es decir x esta expresando en teacuterminos de los vectores de la base B para hacer hincapieacute
en este hecho se escribe Como B es otra base en R2 existen escalares
c1 y c2 tales que (1) Una vez que se encuentran estos escalares Se
puede escribir para indicar que x esta ahora expresado en teacuterminos de los vectores en B para encontrar los nuacutemeros c1 y c2 se escribe la base anterior en teacuterminos
de la nueva base Es sencillo verificar que
y es
decir Entonces
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
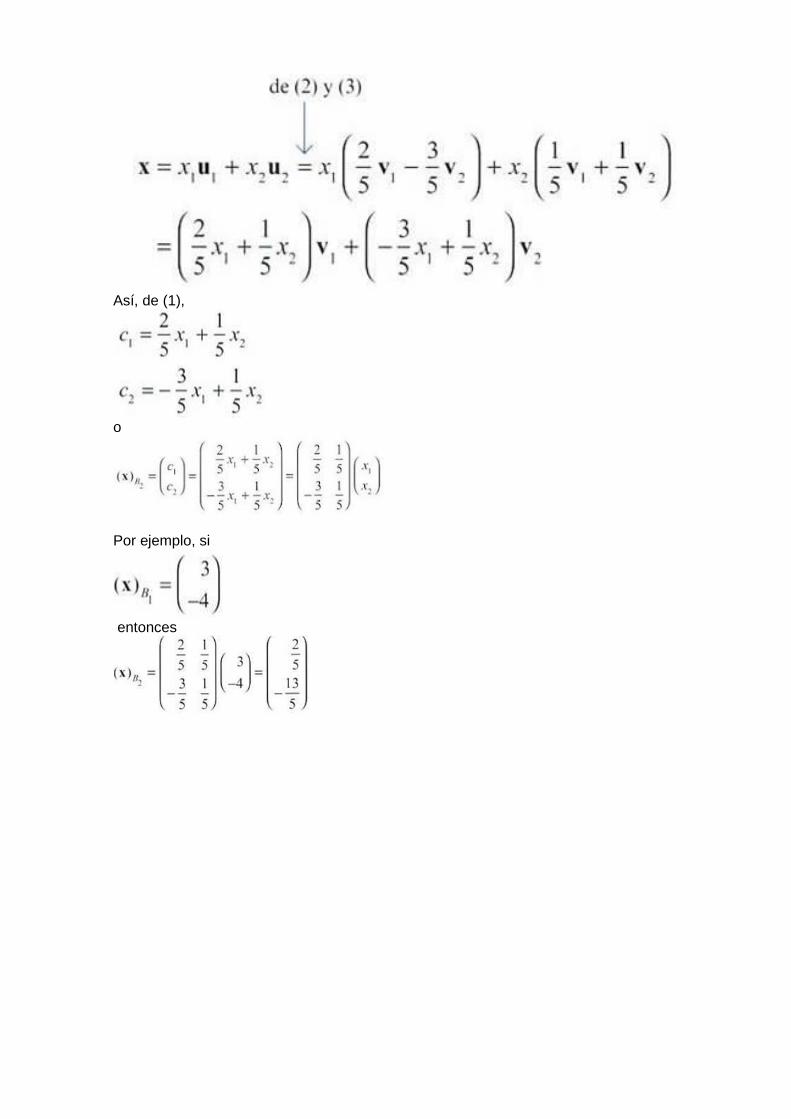
Asiacute de (1)
o
Por ejemplo si
entonces
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
45 ESPACIO VECTORIAL CON PRODUCTO INTERNO Y SUS PROPIEDADES
DEFINICIOacuteN 1
Espacio con producto interno- Un espacio vectorial complejo V se llama espacio con producto interno si para cada par ordenado de vectores u y v en V existe un nuacutemero
complejo uacutenico (uv) llamado producto interno de u y v tal que si u v y w estaacuten en V y
C entonces
EJEMPLO
Un producto interno en Rn Rn - es un espacio con producto interno con (u v)= u v
DEFINICIOacuteN 2
Sea V un espacio con producto interno y suponga que u y v estan en V Entonces
i U y v son ortogonales si (u v) = 0
La norma de u denota por u esta dada por
U =
Nota A la u se le pone doble barra para evitar confusioacuten con el valor absoluto
EJEMPLO
Dos vectores ortogonales en C2 En C2 los vectores (3 -1) y (2 6i) son ortogonales porque
((3 -1) (2 6i)) = 32 + (-i)(6i) = 6 + (-i)(-6i) = 6 -6 = 0 ademaacutes (3 -i)) = =
DEFINICIOacuteN 3
Conjunto ortonormal - El conjunto de vectores v1 v2 vn es un conjunto ortonormal en V si
(vi vj) = 0 para i
y
vi = = 1
DEFINICIOacuteN 4
Complemento ortogonal- Sea H un subespacio del espacio con producto interno V Entonces el complemento ortogonal de H denotado por H estaacute dado por
H = x V (x h) = 0 para todo h H
46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

46 BASE ORTONORMAL PROCESO DE ORTONORMALIZACIOacuteN
DE GRAM-SCHMIDT
El proceso de ortogonalizacioacuten de GramndashSchmidt de aacutelgebra lineal es un proceso utilizado en matemaacutetica y anaacutelisis numeacuterico para ortogonalizar un conjunto de vectores en un espacio prehilbertiano maacutes comuacutenmente el espacio eucliacutedeo Rn
Ortogonalizacioacuten en este contexto significa lo siguiente comenzamos con vectores v1hellip vk los cuales son linealmente independientes y queremos encontrar mutuamente vectores ortogonales u1 hellip uk los cuales generan el mismo subespacio que los vectores v1 hellip vk
Este proceso lleva el nombre en honor a Jorgen Pedersen Gram y Erhard Schmidt
Definimos el operador proyeccioacuten con
donde los corchetes angulares representan el producto interior proyecta el vector v ortogonalmente en el vector u
Antes de ver el proceso debemos comprender el porqueacute de la definicioacuten de proyeccioacuten Si recordamos la definicioacuten de producto escalar tenemos para el caso del numerador moacutedulo de u por moacutedulo de v por el coseno del aacutengulo que forman En el denominador tenemos moacutedulo de u por moacutedulo de u ya que el coseno seriacutea 1 Si separamos los dos moacutedulos de u en el denominador vemos que a la izquierda tenemos uacutenicamente moacutedulo de v cos (aacutengulo que forman) lo que nos da claramente el moacutedulo del vector proyeccioacuten Teniendo el moacutedulo del vector proyeccioacuten lo uacutenico que debemos hacer es asignarle una direccioacuten cosa que hacemos multiplicaacutendolo por umoacutedulo(u) lo que es el vector de moacutedulo 1 con direccioacuten u (el vector unitario)
El proceso de GramndashSchmidt entonces funciona como sigue
Los dos primeros pasos del proceso de Gram-Schmidt
Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

Ejemplo
Considera el siguiente conjunto de vectores en Rn (con el convencional producto interno)
Ahora aplicamos GramndashSchmidt para obtener un conjunto de vectores ortogonales
Verificamos que los vectores u1 y u2 son de hecho ortogonales
Entonces podemos normalizar los vectores dividiendo su tamantildeo como hemos mostrado anteriormente
UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

UNIDAD 5 TRANSFORMACIONES LINEALES
51 INTRODUCCION A LAS TRANSFORMACIONES LINEALES
AacuteLGEBRA DE LAS TRANSFORMACIONES LINEALES
Una transformacioacuten lineal es un conjunto de operaciones que se realizan sobre un vector para convertirlo en otro vector En ocasiones trabajar con vectores es muy sencillo ya que pueden ser faacutecilmente interpretados dentro de un contexto graacutefico lamentablemente no siempre ocurre y es necesario transformar a los vectores para poderlos trabajar maacutes faacutecilmente Por otra parte trabajar con sistemas lineales es mucho maacutes sencillo que con sistemas no lineales ya que se puede utilizar una teacutecnica llamada superposicioacuten la cual simplifica de gran manera gran variedad de caacutelculos por lo que es de gran intereacutes demostrar que un proceso puede ser reducido a un sistema lineal lo cual solo puede lograrse demostrando que estas operaciones forman una transformacioacuten lineal
Se denomina transformacioacuten lineal funcioacuten lineal o aplicacioacuten lineal a toda aplicacioacuten cuyo dominio y codominio sean espacios vectoriales y se cumplan las siguientes condiciones
Sean V y W espacios vectoriales sobre el mismo campo K y T una funcioacuten de V en W T es una transformacioacuten lineal si para cada par de vectores de u y v pertenecientes a V y para cada escalar k perteneciente a K se satisface que
1
2 donde k es un escalar
Son aplicaciones lineales los operadores usados en la formulacioacuten matemaacutetica de la mecaacutenica cuaacutentica Para detalles especiacuteficos sobre estos ver el artiacuteculo Operador (mecaacutenica cuaacutentica)
Propiedades de las transformaciones lineales
1
Transformacioacuten Lineal Singular y No Singular
Sean y espacios vectoriales sobre el mismo campo y una transformacioacuten lineal
de en Entonces es no singular si
X
En caso contrario es singular
Teorema fundamental de las transformaciones lineales
Sea B = v1v2v3vn base de V y C = w1 w2 w3wn n un conjunto de vectores de W no necesariamente distintos entonces existe una uacutenica transformacioacuten lineal
Para todo
Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

Clasificacioacuten de las transformaciones lineales
1 Monomorfismo Si es inyectiva o sea si el uacutenico elemento del nuacutecleo
es el vector nulo
2 Epimorfismo Si es sobreyectiva (exhaustiva)
3 Isomorfismo Si es biyectiva (inyectiva y exhaustiva)
4 Endomorfismo Si o sea si el dominio es igual al codominio (el espacio vectorial de salida y el de llegada son el mismo)
5 Automorfismo Si es endomorfismo e isomorfismo a la vez
Definicioacuten 1 Sean espacios vectoriales y sea Diremos que es
1 Una transformacioacuten lineal (o morfismo ) si dados
2 Un Monomorfismo si es un morfismo inyectivo
3 Un epimorfismo si es un morfismo sobreyectivo
4 Un isomorfismo si es un morfismo biyectivo
Ademaacutes llamaremos ( para abreviar) al espacio de morfismos de
donde es la funcioacuten constante cero esto es
Y la suma y producto escalar en se definen asiacute
1 Si entonces es la transformacioacuten dada por
2 Si entonces es la transformacioacuten dada por
TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

TEOREMAS
TEOREMA 21 Si T V W es una transformacioacuten lineal entonces V es dimensionalmente finito si y soacutelo si N(T) y R(T) son dimensionalmente finitos y en este caso
dim(V) = nulidad(T) + rango(T)
Demostracioacuten
Dados dos espacios vectoriales V y W sobre un campo F definimos
L(V W) = T V W | T es una transformacioacuten lineal
Si T U Icirc L(V W) y a Icirc F definimos aT + U V reg W como (aT + U)(x) = aT(x) + U(x) para toda x Icirc F Es un ejercicio verificar que aT + U es una transformacioacuten lineal y que L(V W) junto con estas operaciones de suma y de multiplicacioacuten por escalares es un espacio vectorial sobre F
Definimos el que una funcioacuten fuera inyectiva sobre y biyectiva Es un ejercicio demostrar que para una transformacioacuten lineal T V W las siguientes condiciones son equivalentes
T es inyectiva N(T) = 0 (es decir nulidad(T) = 0) Para todo S ecirc V S es linealmente independiente si y soacutelo si T(S) ecirc W es linealmente
independiente
Tambieacuten se deja como ejercicio el verificar que si V y W son dos espacios vectoriales con la misma dimensioacuten (finita) y T V W es una transformacioacuten lineal entonces T es inyectiva o sobre si y soacutelo si es biyectiva
Una transformacioacuten lineal es una funcioacuten que preserva la estructura algebraica de espacio vectorial por lo que no toda funcioacuten entre espacios vectoriales es una transformacioacuten lineal De hecho es sencillo encontrar funciones inyectivas sobre y biyectivas que no son transformaciones lineales Esto motiva las definiciones de monomorfismo epimorfismo e isomorfismo
LEMA 22 Sean V y W dos espacios vectoriales sobre un campo F Supongamos que V es
dimensionalmente finito y que b = x1 xn es una base de V Entonces para todo y1
yn iacute W existe una unica transformacioacuten lineal T V W tal que T(xi) = yi para toda i = 1
n
TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

TEOREMA 23 En la categoriacutea de los espacios vectoriales dimensionalmente finitos la dimensioacuten es un invariante completo de isomorfismo Es decir para cualesquiera dos espacios vectoriales dimensionalmente finitos V y W sobre un campo F existe un isomorfismo entre V y W si y soacutelo si dim(V) = dim(W)
Demostracioacuten
Sea V un espacio vectorial dimensionalmente finito sobre un campo F y sea b = (x1 xm) una base ordenada de V Para cada x Icirc V existen escalares uacutenicos a1 am Icirc F tales que x = a1x1 + + amxm Definimos al vector coordenado de x relativo a b como
[ x ]b = (
a1
am
)
Es faacutecil ver que el mapeo x | [ x ]b constituye un isomorfismo ccedil V Mn x 1(F)
Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 xn una base ordenada de W Para cada T Icirc L(V W) definimos la matriz asociada a T con respecto a las bases ordenadas b y g como
[T] g
b
= ( [T(x1)]g [T(xm)]g )
Por otro lado dada una matriz A Icirc Mn x m(F) la funcioacuten LA Fm reg Fn definida por LA(x) = Ax es
una transformacioacuten lineal (ejercicio)
TEOREMA 24 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un campo F b = x1 xm una base ordenada de V y g = y1 yn una base ordenada de W Entonces el mapeo T | [T]b
g constituye un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-1(A) Icirc L(V W) es tal que [F-1(A)]b
g = A
Demostracioacuten
Sean V y W dos espacios vectoriales sobre un campo F Si T Icirc L(V W) entonces existe una matriz asociada a T por cada par de bases ordenadas b y g de V y W respectivamente El siguiente teorema (cambio de coordenadas) establece la relacioacuten entre estas matrices
TEOREMA 25 Sean V y W dos espacio vectoriales dimensionalmente finitos sobre un
campo F Si b b son dos bases ordenadas de V y g g son dos bases ordenadas de W
entonces existe una matriz invertible Q tal que Entonces el mapeo T | [T]bg constituye
un isomorfismo F L(V W) Mn x m(F) Maacutes auacuten para toda A Icirc Mn x m(F) se tiene que F-
1(A) Icirc L(V W) es tal que [F-1(A)]bg = A
Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

Ejercicios
Sea un -espacio vectorial y una transformacioacuten lineal de de rango
Demostrar que existe un escalar tal que
Solucioacuten Puesto que entonces existe un vector no nulo de tal que
asiacute para alguacuten de Sea un vector de entonces
es decir
Encontrar subespacios de tales que pero la suma no es directa
Solucioacuten Sea
Es claro que En efecto
Pero noacutetese que la suma no es directa
ya que puesto que el vector
Sea un -espacio vectorial y sea un subespacio de Dado denotemos
por el subconjunto de definido por Denotemos por
la coleccioacuten de todos estos subconjuntos es decir Demostrar que
Solucioacuten (i) Si entonces luego y entonces
por tanto Veamos ahora el reciacuteproco debemos
demostrar que sea entonces
Hemos ltdemostrado que Sea ahora
entonces
luego hemos probado la otra inclusioacuten es
decir y de esta manera se tiene que
(ii) Veamos que la operacioacuten de suma estaacute bien definidasea y entonces
debemos ver que entonces
es decir
Ahora revisemos las propiedades de la suma de vectores la asociatividad y la conmutatividad son consecuencia de las respectivas propiedades de la suma de vectores en
El cero del espacio cociente es
El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

El opuesto del vector es De la misma forma se demuestra que la operacioacuten de escalar por vector estaacute bien definida y ademaacutes se cumplen las otras propiedades de espacio
vectorial
(iii) Sea sea una base de seguacuten la Prop 9 del Capiacutetulo 1 esta base se puede completar hasta una base de
Vamos a probar que el conjunto
es una base de veamos en primer lugar que este conjunto de clases
genera al espacio
Sea en donde podemos entonces expandir este elemento de la base completada
tomamos las clases
por tanto
Hemos demostrado que
Veamos ahora que estas clases son LI sean tales que
entonces luego
es decir
y de esta forma
luego
En total se tiene que
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
52 NUacuteCLEO E IMAGEN DE UNA TRANSFORMACION LINEAL
TEOREMA 1
Sean T V W una transformacioacuten lineal Entonces para todos los vectores u v v1
v2hellip vnen V y todos los escalares α1 α2hellip αn
I T(0) = 0
II T(u ndash v) = Tu ndashTv
III T(α1 v1 + α2 v2 + hellip + αn vn) = α1T v1 + α2Tv2 + hellip + αnTvn
NOTA En la parte I) el 0 de la izquierda es el vector cero en V mientras que el 0 de la
derecha es el vector cero en W
DEMOSTRACIOacuteN
I T(0) = T(0 + 0) = T(0) + T(0) Asiacute
0 = T(0) ndash T(0) = T(0) + T(0) ndash T(0) = T(0)
II T(u ndash v) = T [n + (-1)v] = Tu + T [(-1)v] = Tu + (-1)Tv = Tundash Tv
III Esta parte se prueba por induccioacuten (vea el apeacutendice 1) Para n=2 se tiene
T(α1 v1 + α2 v2) = T(α1 v1) + T(α2 v2) = α1T v1 + α2Tv2 Asiacute que la ecuacioacuten (1) se
cumple para n=2 Se supone que se cumple para n=k y se prueba para n= k + 1
T(α1 v1 + α2 v2 + hellip + αk vk + αk+1 vk+1) = T(α1 v1 + α2 v2 + hellip + αk vk) + T(αk+1 vk+1) y
usando la ecuacioacuten en la parte III) para n=k esto es igual a (α1T v1 + α2Tv2 + hellip +
αkTvk) + αk+1Tvk+1 que es lo que se queriacutea demostrar Esto completa la prueba
Un hecho importante sobre las transformaciones lineales es que estaacuten completamente
determinadas por el efecto sobre los vectores de la base
TEOREMA 2
Sea V un espacio vectorial de dimensioacuten finita con base B=v1 v2hellip vn Sean w1 w2hellip wn
n vectores en W suponga que T1 y T2 son dos transformaciones lineales de V en W tales
que T1vi = T2vi= wipara i = 1 2hellip n Entonces para cualquier vector v є V T1v = T2v es
decir T1 = T2
DEMOSTRACIOacuteN
Como B es una base para V existe un conjunto uacutenico para escalares α1 α2hellip αn tales que
v = α1v1 + α2v2+hellip + αnvn Entonces de la parte III) del teorema 1
T1v = T1 (α1v1 + α2v2 +hellip+ αnvn) = α1T1v1 + α2T1v2 +hellip+ αnT1vn= α1w1 + α2w2 +hellip+ αnwn
De manera similar
T2v = T2 (α1v1 + α2v2 +hellip+ αnvn) = α1T2v1 + α2T2v2 +hellip+ αnT2vn= α1w1 + α2w2 +hellip+ αnwn
Por lo tanto T1v = T2v
El teorema 2 Dice que si T V W y V tiene dimensioacuten finita entonces solo es necesario
conocer el efecto de T sobre los vectores de la base en V Esto es si se conoce la imagen
de cada vector baacutesico se puede determinar la imagen de cualquier vector en V Esto
determina T por completo Para ver esto sean n v1 v2hellip vnuna base en V y sea v otro
vector en V Entonces igual que en la prueba del teorema 2
Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

Tv = α1Tv1+ α2Tv2 +hellip+ αnTvn
Asiacute se puede calcular Tv para cualquier vector v є V si se conocen Tv1 Tv2hellip Tvn
Si se conoce el efecto de una transformacioacuten liacuteneal sobre los vectores de la base entonces
se conoce el efecto sobre cualquier otro vector
Sea T una transformacioacuten liacuteneal de R3 en R2 y suponga que T = T = y T
= calcule T
Solucioacuten Se tiene = 3 -4 + 5
Entonces T = 3T - 4T + 5T
= 3 - 4 + 5 = + + =
TEOREMA 3
Sea V un espacio vectorial de dimensioacuten finita con base B = v1 v2hellip vn sea W un
espacio vectorial que contiene los vectores w1 w2hellip wn entonces existe una
transformacioacuten lineal uacutenica T VW tal que Tvi = wipara i = 1 2hellip n
DEMOSTRACIOacuteN
Se define la funcioacuten T como sigue
I Tvi = wi
II Si v = α1v1 + α2v2+ hellip+ αnvn entonces
Tv = α1w1 + α2w2+hellip+ αnwn
Como B es una base V T esta definida para todo v єV y como W es un espacio vectorial
Tv є W entonces solo falta demostrar que T es lineal pero esto se deduce directamente de
la ecuacioacuten (1) Si u = α1v1 + α2v2+hellip+ αnvny v= β1v1+ β2v2 +hellip+ βnvn entonces
T(u+v)= T[(α1+β1)v1+ (α2β2)v2+hellip+( αn + βn)vn]
= (α1+β1)w1 + (α2+β2)w2 +hellip+ (αn+βn)wn
=(α1+w1 + α2+w1+hellip+ αn+wn) + (β1+w1+ β2+w2 +hellip+ βn+wn)
= Tu + Tv
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
De manera similar T (αv) = αTv asiacute que es lineal La unidad de T se obtiene del teorema 2
y la prueba queda completa
TEOREMA 4
Si TW es una transformacioacuten lineal entonces
I nu T es un subespacio de V
II imagen T es un subespacio de W
DEMOSTRACIOacuteN
I Sean u y v en un T entonces T(u + v) = Tu + Tv = 0 + 0 = 0 y T(αTu) = α0 = 0 de
forma que u + v y αu estaacuten en un T
II Sean w y x en imagen T Entonces w =Tu y x = Tv para dos vectores u y v en V
Esto significa que T(u + v) = Tu + Tv = w + x y T(αu) = αTu = αw por lo tanto w + x
y αw estaacuten en la imagen T
Nuacutecleo e imagen de la transformacioacuten cero
Sea Tv = 0 para todo v є V (T es la transformacioacuten cero) Entonces nuT = V e imagen T =
0
Nuacutecleo e imagen de la transformacioacuten identidad
Sea Tv = v para todo v є V (T es la transformacioacuten identidad) Entonces un T = 0 e imagen
T = V
Las transformaciones cero e identidad proporcionan dos extremos En la primera todo esta
en el nuacutecleo En la segunda solo el vector cero esta en el nuacutecleo Los casos intermedios
son maacutes interesantes
Nuacutecleo e imagen de un operador de proyeccioacuten
Sea T R3R3 definida por T = Esto es T es el operador de proyeccioacuten de R3 en
el plano xy Si T = = 0 = entonces x = y = 0 Asiacute un T = (x y z) x = y =
0 = eje z e imagen T = (x y z)z = 0 = plano xy Observe que dim un T = 1 y dim imagen
T = 2
Nulidad y rango de una transformacioacuten lineal
Si T es una transformacioacuten lineal de V en W entonces se define
Nulidad de T = v(T)= dim un T
Rango de T = (T) = dim imagen T
Nuacutecleo y nulidad de un operador de proyeccioacuten
SeaHun subespacio de Rn y sea Tv = proyHv Es claro que la imagen T = H Se tiene que
toda
v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda

v V si v = h + p = proyHv + proyH1v SiacuteTv = 0 entonces h = 0 lo que significa que v = p
H1 Asiacute un T = H1 (T) = dim H y v(T) = dim H1 = n - (T)
Nuacutecleo e imagen de un operador transpuesto
Sea V = Mmn y defina T Mmn Mmn por T(A) = At Siacute TA = At = 0 entonces At es la matriz
cero de nxm por lo que A es la matriz cero de mxn Asiacute un T = 0 y es claro que imagen T
= MmnEsto significa que v (T) = 0 y (T) = mn
Nuacutecleo e imagen de una transformacioacuten de P3 en P2
Defina T P3P2 por T(p) = T(α0 + α1x + α2x2 + α3x
3) = α0 + α1x + α2x2Entonces siT(p) = 0 α0
+ α1x + α2x2= 0 para toda x lo que implica que α0 = α1 = α2 = 0 Asiacute un T= p P3 p(x) = α3x
3
e imagen T = P2 v(T) = 1 y (T) = 3
Nuacutecleo e imagen de un operador integral
Sea V = C[0 1] y defina J C[0 1] R por Jf = 10 f(x) dx Entonces nuJ = f C[0 1]
10f(x) dx = 0 Sea α un nuacutemero real Entonces la funcioacuten constante f(x) = α para x [0 1]
esta en C[0 1] y 10 αdx = α Como estos se cumple para todo nuacutemero real α se tiene que
imagen J = R
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda
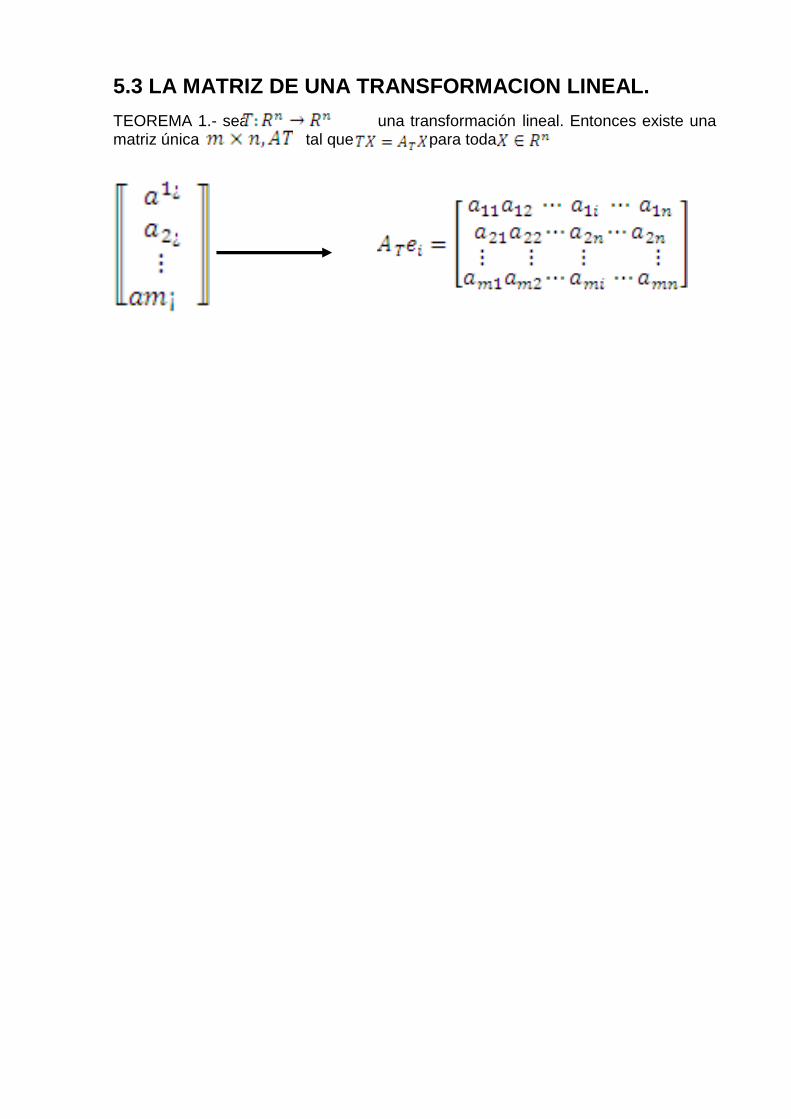
53 LA MATRIZ DE UNA TRANSFORMACION LINEAL
TEOREMA 1- sea una transformacioacuten lineal Entonces existe una matriz uacutenica tal que para toda