actuadores eléctricos - motoresrobotica-up.org/mecatronica/lab/presentacion_mecatronica_up_7.pdfel...
TRANSCRIPT

Actuadores eléctricos - Motores Motores de paso
La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90° hasta pequeños movimientos de tan solo 1.8°, es decir, que se necesitarán 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°), para completar un giro completo de 360°. Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos.
35
Actuadores

Actuadores eléctricos - Motores Motores de paso
Básicamente estos motores están constituidos normalmente por un rotor sobre el que van aplicados distintos imanes permanentes y por un cierto número de bobinas excitadoras bobinadas en su estator. Las bobinas son parte del estator y el rotor es un imán permanente. Toda la conmutación (o excitación de las bobinas) deber ser externamente manejada por un controlador.
Los motores paso a paso de imán permanente se dividen a su vez en distintos tipos, diferenciados por el tipo de bobinado. Existen entonces motores paso a paso de imán permanente unipolares (también llamados unifilares),y los de imán permanente bipolares (también llamados bifilares).
36
Actuadores
Actuadores eléctricos - Motores Motores de paso unipolares
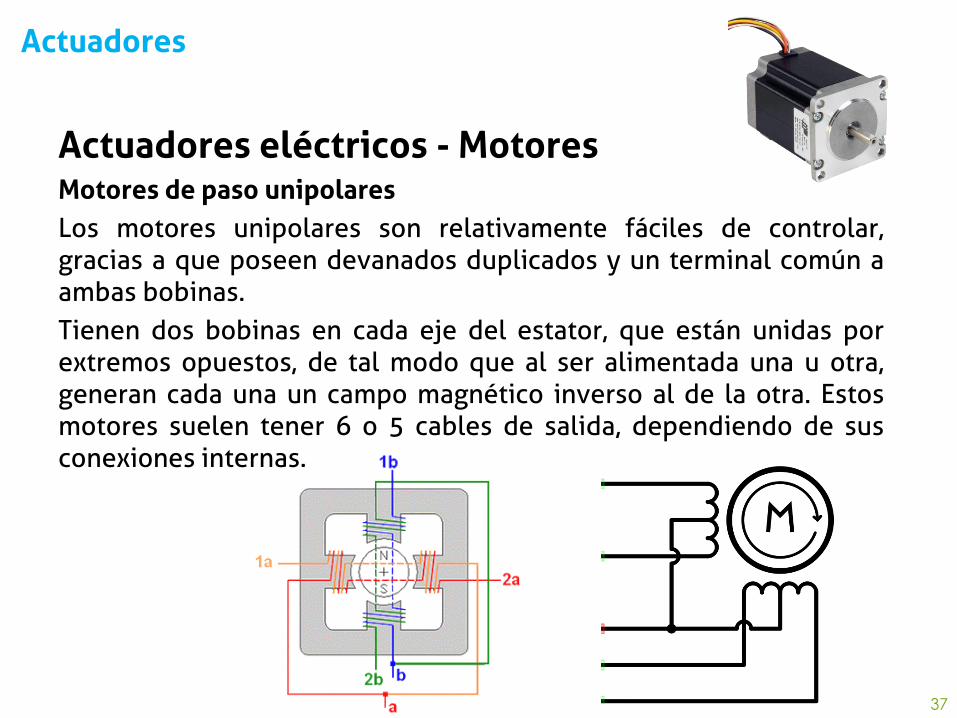
Los motores unipolares son relativamente fáciles de controlar, gracias a que poseen devanados duplicados y un terminal común a ambas bobinas.
Tienen dos bobinas en cada eje del estator, que están unidas por extremos opuestos, de tal modo que al ser alimentada una u otra, generan cada una un campo magnético inverso al de la otra. Estos motores suelen tener 6 o 5 cables de salida, dependiendo de sus conexiones internas.
37
Actuadores
Actuadores eléctricos - Motores Motores de paso unipolares
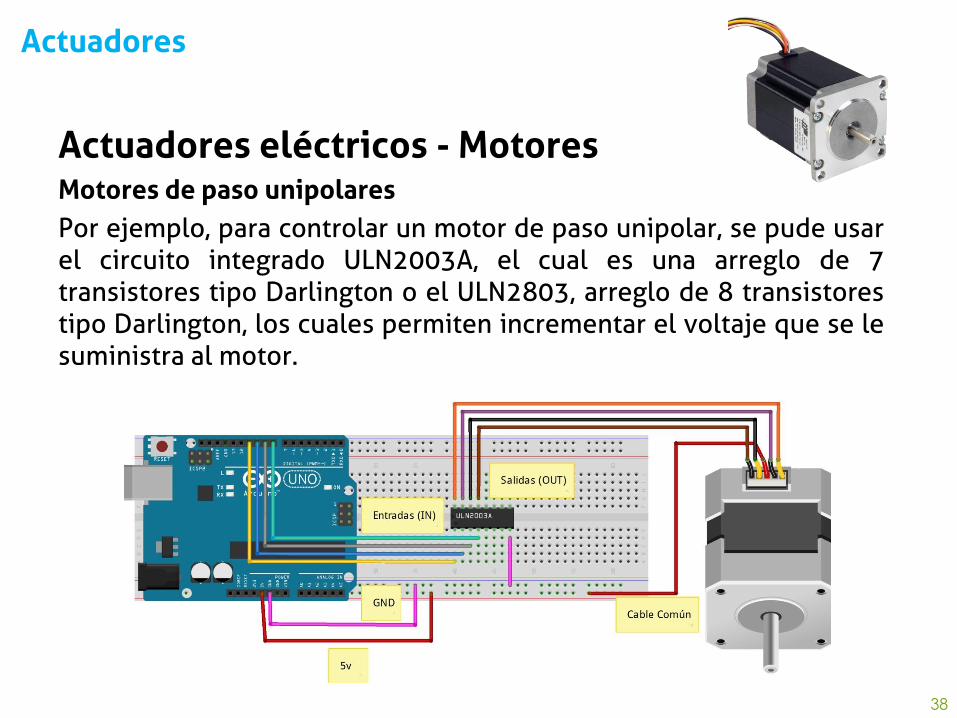
Por ejemplo, para controlar un motor de paso unipolar, se pude usar el circuito integrado ULN2003A, el cual es una arreglo de 7 transistores tipo Darlington o el ULN2803, arreglo de 8 transistores tipo Darlington, los cuales permiten incrementar el voltaje que se le suministra al motor.
38
Actuadores

Actuadores eléctricos - Motores Motores de paso unipolares
El ULN2803 es una matriz Darlington de ocho canales utilizados para interconectar a los microcontroladores de alta tensión, altos dispositivos como solenoides, lámparas, relevadores, etc. Tiene la capacidad para conducir 500 mA en un solo canal. En la salida tienen diodos de fijación para proteger los circuitos de baja potencia del microcontrolador.
El ULN2003 es un conjunto de siete transistores Darlington, al igual que el circuito integrado ULN2803, tiene la capacidad para conducir 500 mA en un solo canal.
39
Actuadores
Actuadores eléctricos - Motores Motores de paso unipolares
Existen tres secuencias posibles para este tipo de motores, las cuales se detallan a continuación.
Secuencia Normal: Con esta secuencia el motor avanza un paso por vez y debido a que siempre hay al menos dos bobinas activadas, se obtiene un alto torque de paso y de retención.
Secuencia del tipo wave drive: En esta secuencia se activa solo una bobina a la vez. En algunos motores esto brinda un funcionamiento mas suave. La contrapartida es que al estar solo una bobina activada, el torque de paso y retención es menor.
Secuencia del tipo medio paso: En esta secuencia se activan las bobinas de tal forma de brindar un movimiento igual a la mitad del paso real. Para ello se activan primero 2 bobinas y luego solo 1 y así sucesivamente.
40
Actuadores

Actuadores eléctricos - Motores Motores de paso unipolares – secuencia normal
41
Actuadores
PASO Bobina A Bobina B Bobina C Bobina D
1 ON ON OFF OFF
2 OFF ON ON OFF
3 OFF OFF ON ON
4 ON OFF OFF ON

Actuadores eléctricos - Motores Motores de paso unipolares – secuencia wave drive
42
Actuadores
PASO Bobina A Bobina B Bobina C Bobina D
1 ON OFF OFF OFF
2 OFF ON OFF OFF
3 OFF OFF ON OFF
4 OFF OFF OFF ON
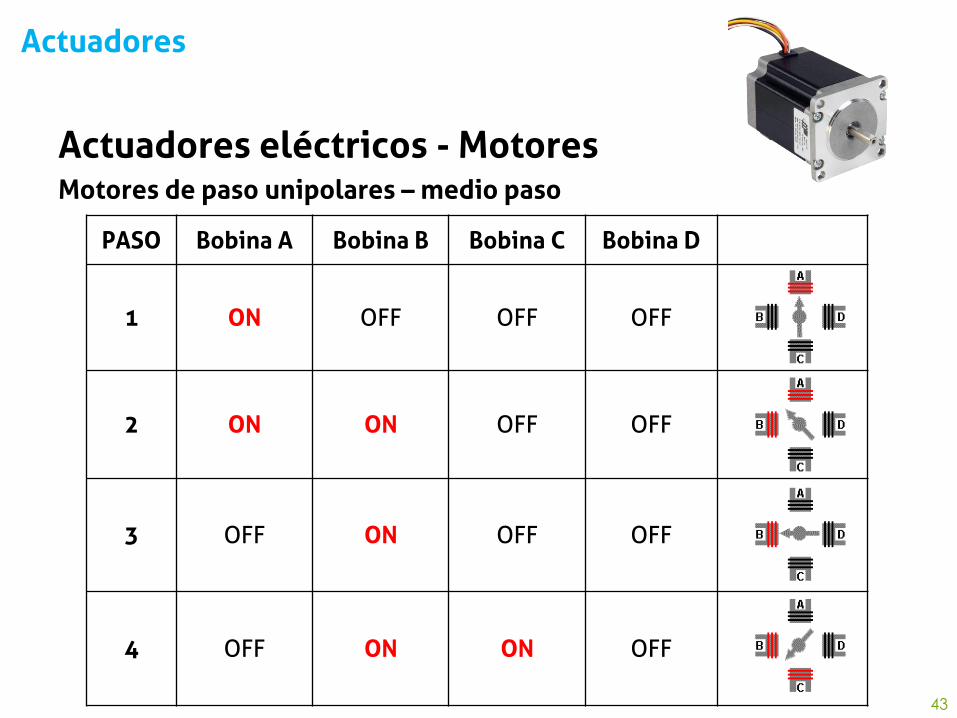
Actuadores eléctricos - Motores Motores de paso unipolares – medio paso
43
Actuadores
PASO Bobina A Bobina B Bobina C Bobina D
1 ON OFF OFF OFF
2 ON ON OFF OFF
3 OFF ON OFF OFF
4 OFF ON ON OFF
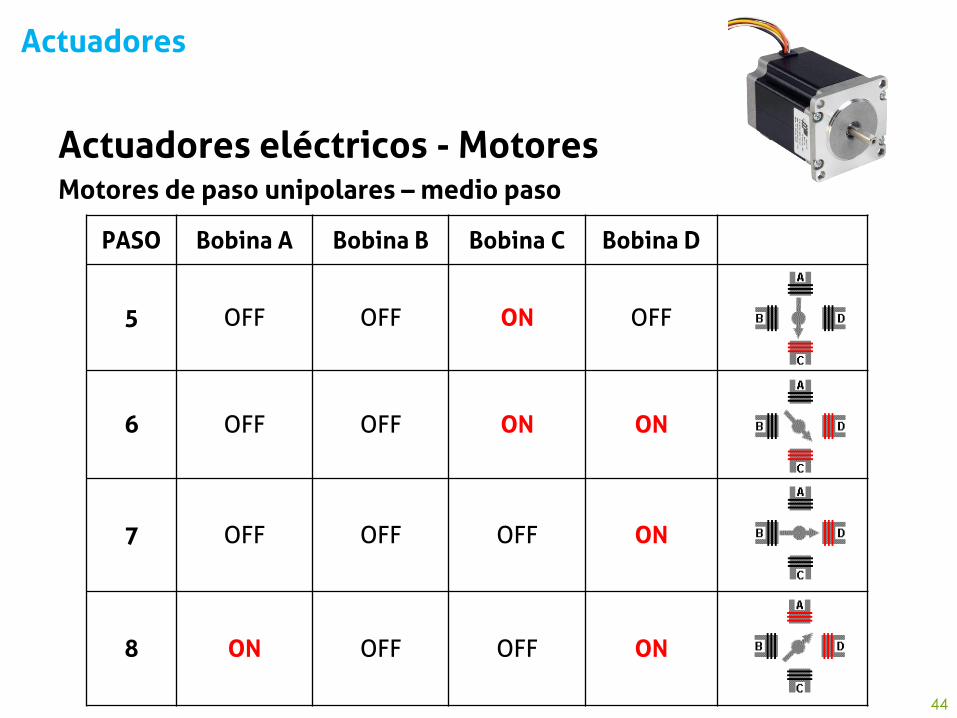
Actuadores eléctricos - Motores Motores de paso unipolares – medio paso
44
Actuadores
PASO Bobina A Bobina B Bobina C Bobina D
5 OFF OFF ON OFF
6 OFF OFF ON ON
7 OFF OFF OFF ON
8 ON OFF OFF ON

Actuadores eléctricos - Motores Motores de paso bipolares
Los motores bipolares requieren circuitos de control y de potencia más complejos. Como no tienen el doble bobinado de los unipolares, los motores bipolares ofrecen una mejor relación entre torque y tamaño/peso. La configuración de los motores bipolares requiere que las bobinas reciban corriente en uno y otro sentido, y no solamente un encendido/apagado como en los unipolares. Esto hace necesario el uso de un Puente H sobre cada uno de los bobinados.
45
Actuadores

Actuadores eléctricos - Motores Motores de paso bipolares
Estos motores necesitan la inversión de la corriente que circula en sus bobinas en una secuencia determinada. Cada inversión de la polaridad provoca el movimiento del eje en un paso, cuyo sentido de giro está determinado por la secuencia seguida. A continuación se puede ver la tabla con la secuencia necesaria para controlar motores paso a paso del tipo Bipolares:
46
Actuadores
PASO TERMINALES
A B C D
1 +V -V +V -V
2 +V -V -V +V
3 -V +V -V +V
4 -V +V +V -V

Actuadores eléctricos - Motores Motores de paso bipolares
Estos motores tienen generalmente cuatro cables de salida. El uso del puente H es necesario para cada bobina del motor, es decir que para controlar un motor de pasos de 4 cables, es necesario utilizar dos puentes H. El L293D tiene dos puentes H y proporciona 600mA al motor y soporta un voltaje entre 4,5V y 36V.
47
Actuadores

Actuadores eléctricos - Motores Puente H
Para utilizar el motor en dirección directa e inversa se utiliza un circuito con cuatro transistores llamado Puente H. El L293 es un circuito integrado que se usa para el control de dos motores que pueden ser controladores simultáneamente y, además, en forma bidireccional.
48
Actuadores

Proyecto de laboratorio 7
49
50
Proyecto de laboratorio 7
Crear un dispositivo mecánico con la ayuda de un motor a pasos que permita encender / apagar un botón pulsador, ya se uno de emergencia o de mando.
Objetivo: Objetivo:
Características del sistema: • El dispositivo mecánico deberá activarse mediante un botón (ON/OFF)
realizado en HTML ligado con una base de datos. • Este dispositivo emulará físicamente un “dedo humano”, el cual
encenderá o apagará el botón pulsador. • Deberá tener la opción de activar el botón manual o automático, el
modo automático, deberá encender activar el botón a una determinada hora y apagarlo 30 min, 1 hora o 2 horas después.
• En Visual Basic se deberá representar gráficamente el dispositivo mecánico, así como sus modalidades y tiempos de programación.

Proyecto de laboratorio 7
51
Entrega del proyecto: • Tiempo de 1 hora y 30 minutos para entregar el proyecto. • Jueves 3/11 se presentará el primer avance y se aclaran dudas. • Lunes 7/11 se realizará la séptima entrega. • Documentación en formato de artículo IEEE a doble columna, entregarla
antes de comenzar la siguiente clase después de presentar el proyecto. • Documentación sin haber aprobado la entrega, no se acepta.

52
(ʘ‿ʘ)