62756441-trabajo-de-ejes(1)
TRANSCRIPT

1
Índice
1. Introducción .......................................................................................................................... 3
2. Objetivos ............................................................................................................................... 5
2.1. General .................................................................................................................................. 5
2.2. Específicos ............................................................................................................................. 5
3. Contenido .............................................................................................................................. 6
3.1. Planteamiento del Problema. ........................................................................................... 6
3.2. Diseño de Ejes ................................................................................................................... 6
3.2.1. Cálculos de Fuerzas en cada Eje .................................................................................... 6
3.2.1.1. Eje de entrada ........................................................................................................... 7
3.2.1.2. Eje intermedio ........................................................................................................... 9
3.2.1.3. Eje de salida ............................................................................................................. 10
3.2.2. Cálculo de Cada Eje (con sus respectivos rodamientos) Según El Criterio a Analizar.11
3.2.2.1. Eje entrada .............................................................................................................. 11
3.2.2.1.1. Análisis por deformación y rigidez .......................................................................... 12
3.2.2.1.1.1. Deflexión ............................................................................................................. 14
3.2.2.1.1.2. Rigidez ................................................................................................................. 15
3.2.2.1.2. Deflexión y pendiente en las cargas. ...................................................................... 16
3.2.2.1.3. Pendiente máxima en los rodamientos. ................................................................. 16
3.2.2.1.4. Análisis por fatiga .................................................................................................... 17
3.2.2.1.5. Selección de rodamientos. ...................................................................................... 22
3.2.2.1.6. Calculo de velocidades críticas. ............................................................................... 29
3.2.2.1.7. Calculo de las chavetas. ........................................................................................... 32
3.2.2.2. Eje intermedio ......................................................................................................... 33
3.2.2.2.1. Análisis por deformación y rigidez .......................................................................... 33
3.2.2.2.1.1. Deflexión. ............................................................................................................ 35
3.2.2.2.1.2. Rigidez ................................................................................................................. 36
3.2.2.2.2. Deflexión y pendiente en las cargas. ...................................................................... 36
3.2.2.2.3. Pendiente máxima en los rodamientos. ................................................................. 37
3.2.2.2.4. Análisis por fatiga. ................................................................................................... 38
3.2.2.2.5. Selección de rodamientos. ...................................................................................... 43
2
3.2.2.2.6. Calculo de velocidad crítica. .................................................................................... 50
3.2.2.2.7. Calculo de chavetas. ................................................................................................ 52
3.2.2.3. Eje salida. ................................................................................................................. 53
3.2.2.3.1. Análisis por deformación y rigidez. ......................................................................... 53
3.2.2.3.1.1. Deflexión. ............................................................................................................ 56
3.2.2.3.1.2. Rigidez. ................................................................................................................ 56
3.2.2.3.2. Deflexión y pendiente en las cargas. ...................................................................... 57
3.2.2.3.3. Pendiente máxima en los rodamientos. ................................................................. 58
3.2.2.3.4. Análisis por fatiga .................................................................................................... 58
3.2.2.3.5. Selección de rodamientos. ...................................................................................... 63
3.2.2.3.6. Calculo de velocidad crítica ..................................................................................... 70
3.2.2.3.7. Calculo de chavetas ................................................................................................. 72
4. Conclusiones........................................................................................................................ 74
5. Bibliografía y Cibergrafía ..................................................................................................... 75
ANEXOS
3
1. Introducción
Un eje móvil, o simplemente eje es un elemento rotatorio generalmente de sección transversal circular, cuya función es transmitir movimiento y potencia. Constituye el elemento de rotación dispositivos como engranajes, poleas, volantes, manivelas y otros. Los ejes fijos son elementos no rotatorios o estáticos que no transmite movimiento y se utiliza sólo para sostener piezas rotatorias como ruedas, poleas, rodillos y otros elementos. La forma de los ejes se define a partir de una barra cilíndrica escalonada, generalmente una barra redonda estirada en frío y diámetro uniforme y parecería ser poco costoso, sería difícil montar en ella cojinetes, engranajes, poleas y otros elementos en forma adecuada. Por ende estos elementos deben estar bien ubicados y deben soportar cargas axiales o empuje.
Casi podría decirse que los motores son como el “corazón de la industria”. Pero ese “corazón” tiene diferentes ritmos y funciona a distintas velocidades, dependiendo del uso que se le quiera dar. Por eso los reductores de velocidad son indispensables en todas las industrias del país, desde los que producen cemento hasta los laboratorios de medicamentos requieren en sus máquinas estos mecanismos.
Los reductores son diseñados a base de engranajes, mecanismos circulares y dentados con geometrías especiales de acuerdo con su tamaño y la función en cada motor. Sin la correcta fabricación de los motorreductores, las máquinas pueden presentar fallas y deficiencias en su funcionamiento. La presencia de ruidos y recalentamientos pueden ser aspectos que dependan de estos mecanismos, de allí la importancia del control de calidad. “El desarrollo de esta máquina y del sistema inteligente de medición le permite a las empresas ser mucho más competitivas y aumentar sus conocimientos”. En pocas palabras los reductores son sistemas de engranajes que permiten que los motores eléctricos funcionen a diferentes velocidades para los que fueron diseñados. Rara vez las máquinas funcionan de acuerdo con las velocidades que les ofrece el motor, por ejemplo, a 1.800, 1.600 o 3.600 revoluciones por minuto. La función de un motorreductor es disminuir esta velocidad a los motores (50, 60, 100 rpm) y permitir el eficiente funcionamiento de las máquinas, agregándole por otro lado potencia y fuerza. Los Reductores ó Motorreductores son apropiados para el accionamiento de toda clase de máquinas y aparatos de uso industrial, que necesitan reducir su velocidad en una forma segura y eficiente. Al emplear REDUCTORES O MOTORREDUCTORES se obtiene una serie de beneficios sobre estas otras formas de reducción. Algunos de estos beneficios son: una regularidad perfecta tanto en la velocidad como en la potencia transmitida, una mayor eficiencia en la transmisión de la potencia suministrada por el motor, mayor seguridad en la transmisión, reduciendo los costos en el mantenimiento, menor espacio requerido y mayor rigidez en el montaje, menor tiempo requerido para su instalación. Con este trabajo se busca diseñar y evaluar la transmisión de potencia desde un
motor de combustión interna de 4 cilindros a un Molino de Martillo que presenta una
potencia de 20 Hp. Para lograr los objetivos se realizaron los cálculos de transmisión
por banda, engranajes rectos, helicoidales y por cadena. La solución del sistema lleva

4
a obtener la velocidad que entra al sistema de engranajes, rectos más helicoidales, y
la velocidad que sale. Tras tener los resultados en el sistema total se pide diseñar el
reductor de velocidad, ya habiendo calculado los engranes, sólo resta diseñar los ejes.
Para cumplir con los objetivos se hará uso de los siguientes software: Solid Edge,
Autocad Mechanical, Inventor, MDesign.

5
2. Objetivos
2.1. General
Desarrollar y evaluar el diseño de un reductor de velocidades con los elementos (engranes) diseñados anteriormente; específicamente se pide diseñar los ejes en los que se montan los engranes rectos y helicoidales.
2.2. Específicos
Proponer un diseño de reductor, basado en la literatura.
Estudiar los parámetros y variables dinámicas características de la transmisión, como la velocidad, fuerzas y esfuerzos a los que estarán sometidos cada eje.
Realizar los cálculos para definir y dimensionar los ejes de manera tal que cumpla con las normas por deformación y rigidez, esfuerzo y resistencia y velocidad crítica.
Hacer uso del software para cada criterio de diseño de ejes.
Seleccionar los rodamientos para cada eje, de acuerdo a los resultados obtenidos en el diseño de ejes, mediante Solid Edge.
Adquirir la capacidad de dimensionar cada elemento que compone el reductor de velocidades, así como su funcionamiento.
6
3. Contenido
3.1. Planteamiento del Problema. Se requiere realizar el diseño del reductor de velocidad conformado por los engranajes helicoidales y rectos diseñados con anterioridad, para ello se deben diseñar los ejes que soporten dichos engranes, además de transmitir las velocidades y la potencia necesaria. Para tal fin se deben establecer la velocidad y la potencia tanto de entrada como de salida del reductor. Para calcular la velocidad crítica de cada eje se deben tener en cuenta los pesos de los elementos montados sobre los mismos. Se dimensionará cada eje de acuerdo al criterio propio y según el modelo escogido de la literatura. Se debe analizar el comportamiento de cada eje por deformación y rigidez, esfuerzo y resistencia y velocidad crítica, con la ayuda de los diferentes software. Se determinarán las fuerzas que se transmiten al eje debido a los elementos que están sobre cada árbol. Consideraciones: Tipo de reductor: De doble Transmisión con ruedas cilíndricas, (De dos cuerpos con el árbol conductor dispuesto en la parte superior). Eje de Entrada: Carga polea conducida, Piñón Helicoidal. Eje Salida: Carga rueda Helicoidal, Sprocket. Eje Intermedio: Piñón recto, Rueda helicoidal. Velocidad de entrada (RPM) = 1599 Velocidad de salida (RPM) = 399.75 Velocidad de E. intermedio (RPM) = 799.5 Potencia (Kw) = 16.675 El material de cada eje se considera de acuerdo a los resultados obtenidos en el software.
3.2. Diseño de Ejes
3.2.1. Cálculos de Fuerzas en cada Eje
En primer lugar se determinan las fuerzas a las que están sometidas cada eje, como se muestra a continuación, y para tal propósito es necesario conocer lo siguiente acerca de cada uno de los elementos.
7
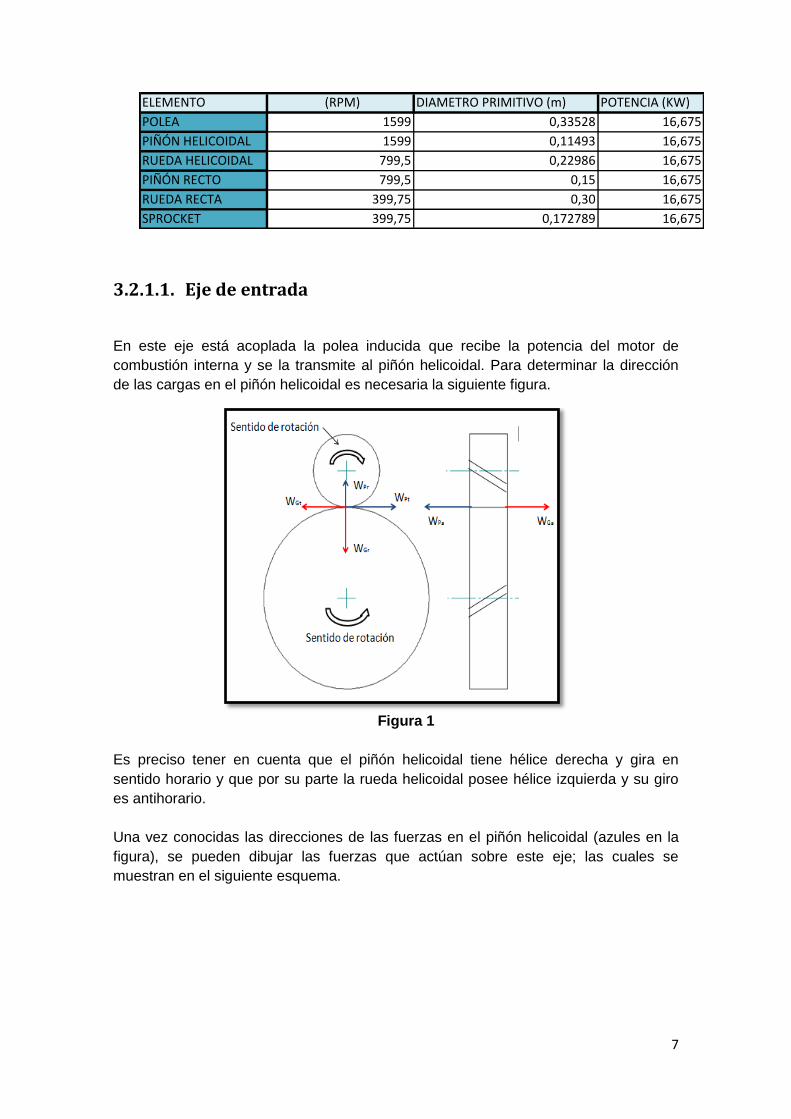
3.2.1.1. Eje de entrada
En este eje está acoplada la polea inducida que recibe la potencia del motor de
combustión interna y se la transmite al piñón helicoidal. Para determinar la dirección
de las cargas en el piñón helicoidal es necesaria la siguiente figura.
Figura 1
Es preciso tener en cuenta que el piñón helicoidal tiene hélice derecha y gira en
sentido horario y que por su parte la rueda helicoidal posee hélice izquierda y su giro
es antihorario.
Una vez conocidas las direcciones de las fuerzas en el piñón helicoidal (azules en la
figura), se pueden dibujar las fuerzas que actúan sobre este eje; las cuales se
muestran en el siguiente esquema.
ELEMENTO (RPM) DIAMETRO PRIMITIVO (m) POTENCIA (KW)
POLEA 1599 0,33528 16,675
PIÑÓN HELICOIDAL 1599 0,11493 16,675
RUEDA HELICOIDAL 799,5 0,22986 16,675
PIÑÓN RECTO 799,5 0,15 16,675
RUEDA RECTA 399,75 0,30 16,675
SPROCKET 399,75 0,172789 16,675

8
Esquema 1. Cargas en eje de entrada
Las magnitudes de dichas fuerzas son:
Fuerzas en la polea.
𝑇𝐴 =9549 × 𝐻 𝐾𝑤
𝑛 𝑅𝑃𝑀 =
9549 × 16.675
1599= 99.58 𝑁. 𝑚
𝐹𝐴 =3 × 𝑇𝐴𝑑𝑝
=3 × 99.58 𝑁. 𝑚
0.33528 𝑚= 891.02 𝑁
Fuerzas en piñón helicoidal
𝑇𝐵 = − 𝑇𝐴 = −99.58 𝑁. 𝑚
𝑊𝑡𝐵 =2 × 𝑇𝐵
𝑑𝑃=
2 × 99.58 𝑁. 𝑚
0.11493 𝑚= 1732.88 𝑁
𝑊𝑟𝐵 =𝑊𝑡𝐵 × tan 𝜙𝑛
cos𝜑𝜓=
1732.88 𝑁 × tan 200
cos 200= 671.194 𝑁
𝑊𝑎𝐵 = 𝑊𝑡𝐵 × tan 𝜓 = 1732.88 𝑁 × tan 200 = 630.716 𝑁
𝑀𝑌𝑋 =𝑊𝑎𝐵 × 𝑑𝑝
2=
630.716 𝑁 × 0.11493 𝑚
2= 36.245 𝑁. 𝑚

9
3.2.1.2. Eje intermedio
Este recibe la potencia por parte del piñón helicoidal, el cual engrana con la rueda
helicoidal que le transmite a su vez esta potencia al piñón recto; En la figura 1 se
muestra la dirección de las fuerzas en la rueda helicoidal (rojas), y en la figura 2 se
ilustran las direcciones de las fuerzas en el piñón recto (azules).
FIGURA 2 Una vez que se conocen las direcciones de las fuerzas, se muestran en el siguiente
esquema como están ubicadas sobre el eje.
Esquema 2. Cargas en eje intermedio
10
Las magnitudes de las fuerzas son las siguientes.
Fuerzas para la rueda helicoidal.
𝑇𝐶 =9549 × 𝐻 𝐾𝑤
𝑛 𝑅𝑃𝑀 =
9549 × 16.675
799.5= 199.16 𝑁. 𝑚
𝑊𝑡𝐶 = 𝑊𝑡𝐵 = 1732.88 𝑁
𝑊𝑟𝐶 = 𝑊𝑟𝐵 = 671.194 𝑁
𝑊𝑎𝐶 = 𝑊𝑎𝐵 = 630.716 𝑁
𝑀𝑌𝑋 =𝑊𝑎𝐶 × 𝐷𝐺
2=
630.716 𝑁 × 0.22986𝑚
2= 72.488 𝑁. 𝑚
Fuerzas en el piñón recto.
𝑇𝐶 = −𝑇𝐷 = −199.16 𝑁. 𝑚
𝑊𝑡𝐷 =2 × 𝑇𝐷
𝑑𝑃=
2 × 199.16 𝑁. 𝑚
0.15 𝑚= 2655.46 𝑁
𝑊𝑟𝐷 = 𝑊𝑡𝐷 × tan 𝜙 = 2655.46 𝑁 × tan 200 = 966.51 𝑁
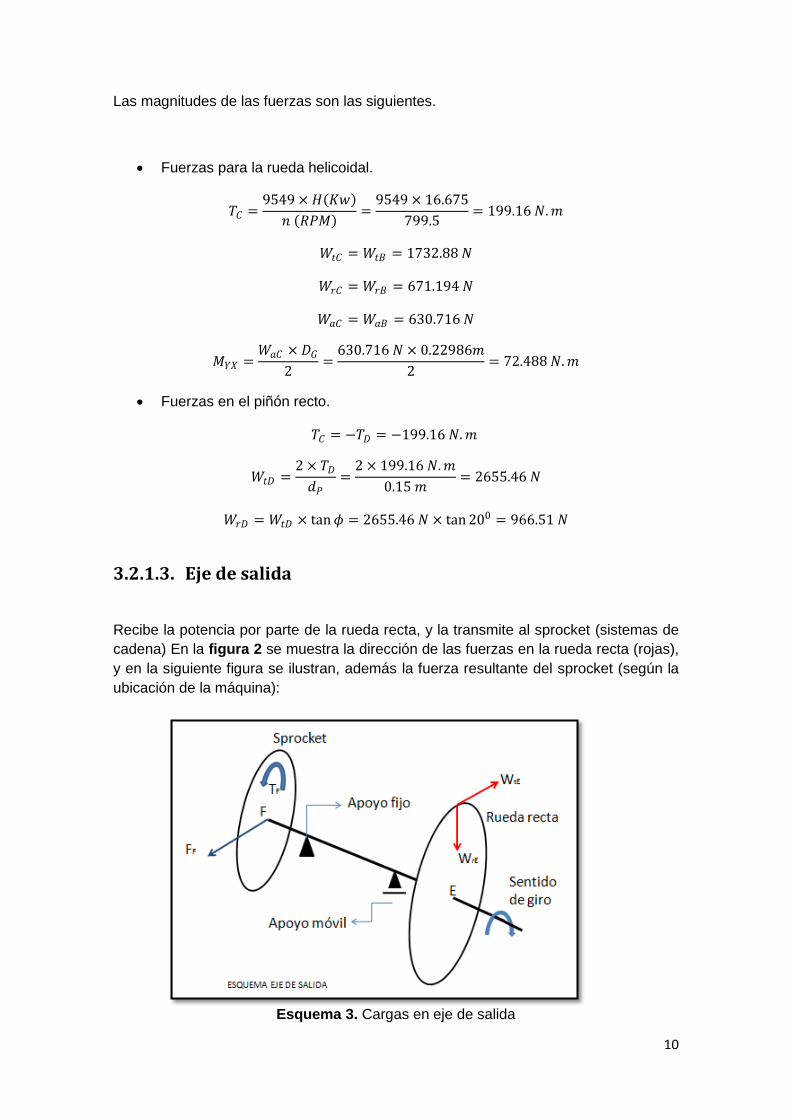
3.2.1.3. Eje de salida
Recibe la potencia por parte de la rueda recta, y la transmite al sprocket (sistemas de
cadena) En la figura 2 se muestra la dirección de las fuerzas en la rueda recta (rojas),
y en la siguiente figura se ilustran, además la fuerza resultante del sprocket (según la
ubicación de la máquina):
Esquema 3. Cargas en eje de salida

11
Fuerzas en la rueda recta
𝑇𝐸 =9549 × 𝐻 𝐾𝑤
𝑛 𝑅𝑃𝑀 =
9549 × 16.675
399.5= 398.572 𝑁. 𝑚
𝑊𝑡𝐸 = 𝑊𝑡𝐷 = 2655.46 𝑁
𝑊𝑟𝐸 = 𝑊𝑟𝐷 = 966.51 𝑁
Fuerzas en el Sprocket
𝑇𝐹 = −𝑇𝐸 = −398.572 𝑁. 𝑚
𝐹𝐹 =2 × 𝑇𝐹
𝑑𝑝=
2 × 398.572 𝑁. 𝑚
0.172789 𝑚= 4613.395𝑁
3.2.2. Cálculo de Cada Eje (con sus respectivos rodamientos)
Según El Criterio a Analizar.
En esta sección se analizará cada uno de los ejes según criterios de diseño, la
metodología consiste en mostrar los resultados de los tres ejes de manera completa.
3.2.2.1. Eje entrada

12
3.2.2.1.1. Análisis por deformación y rigidez
Este enfoque o criterio se analiza con el software Solid Edge 17, se dibuja el eje y se
ingresan el valor de las fuerzas halladas anteriormente; además de la magnitud la
ubicación de las fuerzas y los momentos como también la distancia entre rodamientos
es importante. Ya que todo esto incidirá sobre los resultados para la deformación por
flexión y la deformación por torsión, como la deformación por cortante debida a las
cargas transversales, que es más importante en ejes cortos, además para este criterio
no se tendrá en cuenta el peso de los ejes.
Las fuerzas en el piñón Helicoidal con su ubicación son las siguientes:

13
Fuerzas en la polea con la ubicación de las mismas:
Resultados por Deflexión
Tras ingresar los valores de las fuerzas el programa calcula los siguientes resultados,
algunos de los cuales servirán tanto para el análisis de fatiga como para la selección
de rodamientos, estos resultados se encuentran señalados en la siguiente figura
Figura 3
Como se puede observar de las figuras este análisis se desarrollo con un material
Acero.

14
La máxima deflexión entre soportes se obtiene de la siguiente figura:
Figura 4
Este valor 17.833 um se debe comparar con la máxima deflexión que se calcula de la
siguiente manera, haciendo uso de la siguiente tabla:
eje distancia entre rodamientos (mm) diametro promedio (mm)
eje de entrada 294,5 46,632
eje intermedio 301,5 56,641
eje de salida 300 69,051
Tabla 1
3.2.2.1.1.1. Deflexión La distancia entre soportes es la siguiente.
𝑋 𝑚𝑚
304.8 𝑚𝑚𝑝𝑖𝑒
= 𝑌 𝑝𝑖𝑒
Para ejes de maquinaria se admite deflexiones hasta de 0.001 𝑝𝑢𝑙𝑔
𝑝𝑖𝑒 de longitud de eje
entre soportes de cojinetes.
0.001𝑝𝑢𝑙𝑔
𝑝𝑖𝑒× 𝑌 𝑝𝑖𝑒 = 𝑍 𝑝𝑢𝑙𝑔 ×
25.4 𝑚𝑚
1 𝑝𝑢𝑙𝑔×
1000 𝜇𝑚
1𝑚𝑚= 𝑊 𝜇𝑚
De este modo la 𝒅𝒆𝒇𝒍𝒆𝒙𝒊ó𝒏 𝒑𝒆𝒓𝒎𝒊𝒕𝒊𝒅𝒂 = 𝑊 𝜇𝑚 se compara con la señalada en la
figura 4
𝑆𝑖 𝑊 𝜇𝑚 > 𝑓𝑖𝑔𝑢𝑟𝑎 (𝑑𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑚á𝑥𝑖𝑚𝑎 𝑑𝑎𝑑𝑎 𝑝𝑜𝑟 𝑆𝑜𝑙𝑖𝑑) 𝜇𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒

15
Para el eje de entrada X = 294.5 mm; Y= 0.9662 ft ; Z = 0.0009662 pulg; W = 24.54
um;
Como 𝑊 = 24.54 𝑢𝑚 > 17.833 𝑢𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.1.1.2. Rigidez
Se basa en que puede existir un ángulo de torsión hasta de 1° por 20 veces el
diámetro del eje; en razón de que los ejes son escalonados, es necesario determinar
un diámetro promedio del eje.
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 = 𝑑𝑖 × 𝑙𝑖
𝑙𝑖
Donde 𝑑𝑖 = 𝑑𝑖á𝑚𝑒𝑡𝑟𝑜 𝑑𝑒 𝑙𝑎 𝑠𝑒𝑐𝑐𝑖𝑜𝑛 𝑖
𝑙𝑖 = 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑠𝑒𝑐𝑐𝑖𝑜𝑛 𝑖
Es necesario indicar que solo se toma en cuenta el tramo en el cual hay torsión.
El valor para el diámetro promedio que se encontró para cada eje se muestra en la
tabla 1.
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 𝑒𝑗𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎 = 46.632 𝑚𝑚
Una vez que se tiene el diámetro promedio se cumple.
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 = 𝐾 𝑚𝑚
Conocido el 𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 por medio de una regla de tres se conoce cuanto es el valor
permitido para el tramo en el cual existe torsión en el eje, asi:
𝐾 → 1°
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 → 𝑋°
Despejando 𝑋°
𝑋° =1 × 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠
𝐾
Así si 𝑋° > á𝑛𝑔𝑢𝑙𝑜 𝑜𝑓 𝑡𝑤𝑖𝑠𝑡 (𝑓𝑖𝑔𝑢𝑟𝑎 𝑑𝑒 𝑙𝑜𝑠 𝑟𝑒𝑠𝑢𝑙𝑡𝑎𝑑𝑜𝑠) → 𝑐𝑢𝑚𝑝𝑙𝑒

16
Para el eje de entrada se obtiene K = 932.64 mm y con la distancia entre rodamientos
(tabla 1) se tiene que:
𝑋° =1 × 932.64
294.5= 0.3157
Y comparando este valor con el obtenido para el “angle of twist” (el cual se muestra en
la figura 3), hallado con el software se obtiene que:
𝑋° = 0.3157° > á𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡𝑤𝑖𝑠𝑡 = 0.0513𝑜 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.1.2. Deflexión y pendiente en las cargas.
Para garantizar la calidad de los montajes de engranajes, la deflexión no deberá
exceder de 0.005 pulg (0.127 mm) y la pendiente deberá limitarse a 0.0005 𝑝𝑢𝑙𝑔
𝑝𝑢𝑙𝑔
(0.0286°).
Sobre este eje en el lado izquierdo está montado el piñón helicoidal, y debido a que
este criterio solo aplica para montaje de engranajes, a continuación solo se muestra
las deflexiones y pendientes en esta carga.
Se debe cumplir que:
𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.015652 𝑚𝑚 < 𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎 = 0.127𝑚𝑚
→ 𝐶𝑢𝑚𝑝𝑙𝑒
𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.000132 𝑟𝑎𝑑 < 𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎 = 0.0005 𝑟𝑎𝑑
→ 𝐶𝑢𝑚𝑝𝑙𝑒
3.2.2.1.3. Pendiente máxima en los rodamientos.
Los rodamientos rígidos de bolas son los primeros en la lista al momento de
seleccionar un tipo de rodamientos, pues soportan buena capacidad de carga; a
continuación se muestra la pendiente máxima que admiten para su correcto
funcionamiento, y será el punto de comparación para verificar la factibilidad de instalar
rodamientos rígidos de bolas en este reductor.

17
Rodamiento θMáximo permitido
Rígido de bolas 0.004 rad
Tabla 2
Del software (figura 3) se obtuvieron las siguientes pendientes en los rodamientos.
Figura 5
A partir de este resultado se concluye que los rodamientos rígidos de bolas son
óptimos tanto para el soporte de la izquierda (fijo) y como para el soporte de la
derecha (móvil) debido a que ninguno se encuentra por encima del máximo de los
rodamientos rígidos de bolas. Para definir cual soporte es fijo o móvil, se debe conocer
la dirección de la fuerza axial, de tal forma que el eje quede a compresión,
consideración que se tuvo en cuenta desde el esquema que se presento al principio
del trabajo del eje de entrada.
3.2.2.1.4. Análisis por fatiga
Este análisis se realiza en Autocad Mechanical y se hace uso de algunos resultados
obtenidos en el análisis anterior; de esta manera se dibuja el eje en el software y se
ubican las fuerzas a las distancias predispuestas. En los lugares que están dibujadas
las chavetas irán montados los elementos que debe soportar cada eje. Las fuerzas
están ubicadas en la mitad de cada chaveta.

18
En el lado izquierdo están ubicadas las fuerzas del piñón helicoidal
Las magnitudes de las fuerzas corresponden a las ingresadas en Solid Edge; es
importante saber que Autocad calcula los momentos torsores y flectores
automáticamente al ingresar el desfase de la fuerza (Fz ó Fy), este desfase
corresponde a los valores de Hz ó hy.
En el lado derecho del esquema del eje se ubican las fuerzas ejercidas por la polea
sobre el árbol.
Fuerza.

19
Momento torsor.
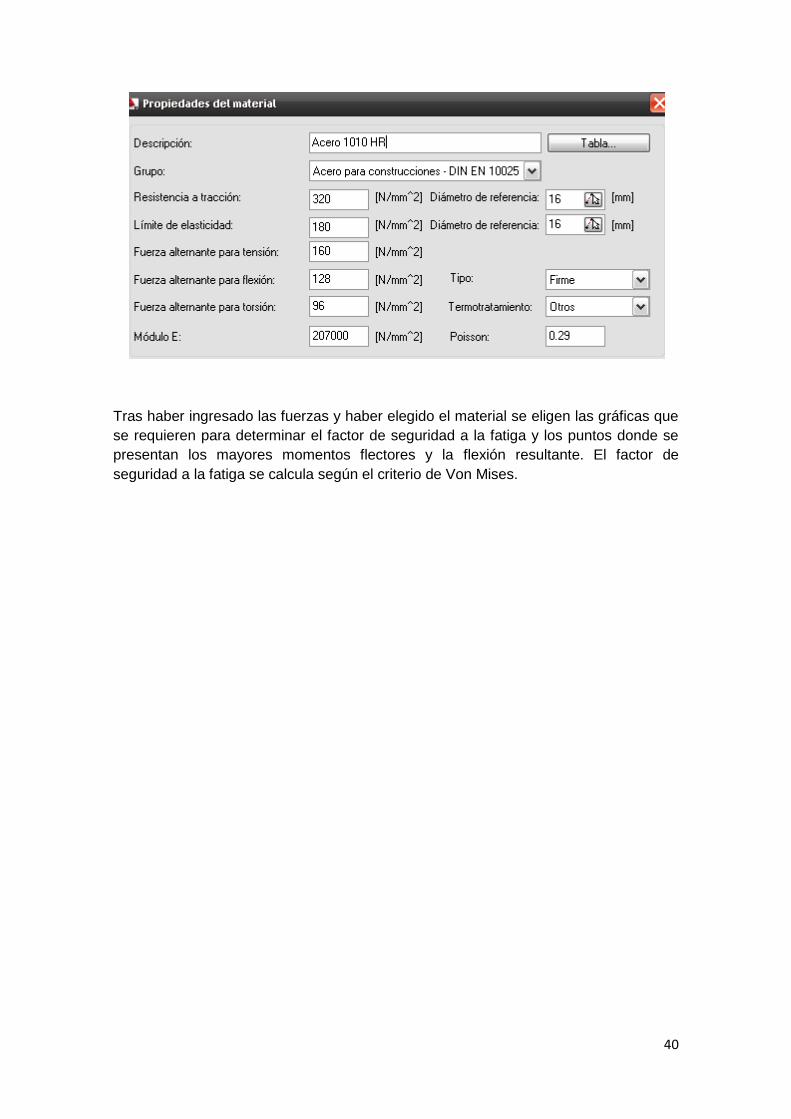
El material que se elige para el análisis es un acero 1010 HR en razón de que al hacer
en SOLID EDGE, los resultados arrojan un máximo esfuerzo de 19.5 Mpa (ver figura
1) y por recomendación se debe poner un material 6 veces mayor es decir (117 Mpa),
pero en razón de que ningún material recomendado para ejes tiene una resistencia a
la tracción tan bajo, se opto por escoger un 1010 HR que es el que presenta menor
resistencia a la tracción de todos los recomendados para ejes. Sus características son
las siguientes.
Tras haber ingresado las fuerzas y haber elegido el material se eligen las gráficas que
se requieren para determinar el factor de seguridad a la fatiga y los puntos donde se
presentan los mayores momentos flectores y la flexion resultante. El factor de
seguridad a la fatiga se calcula según el criterio de Von Mises.

20
Nombrando las gráficas de arriba hacia abajo, la primera muestra el Momento de
Flexion Resultante [Nm], la segunda la Flexion Resultante y la tercera El Máximo
esfuerzo de Von Mises (N/mm2).
Los resultados que se muestran en las gráficas se resumen en la siguiente tabla,
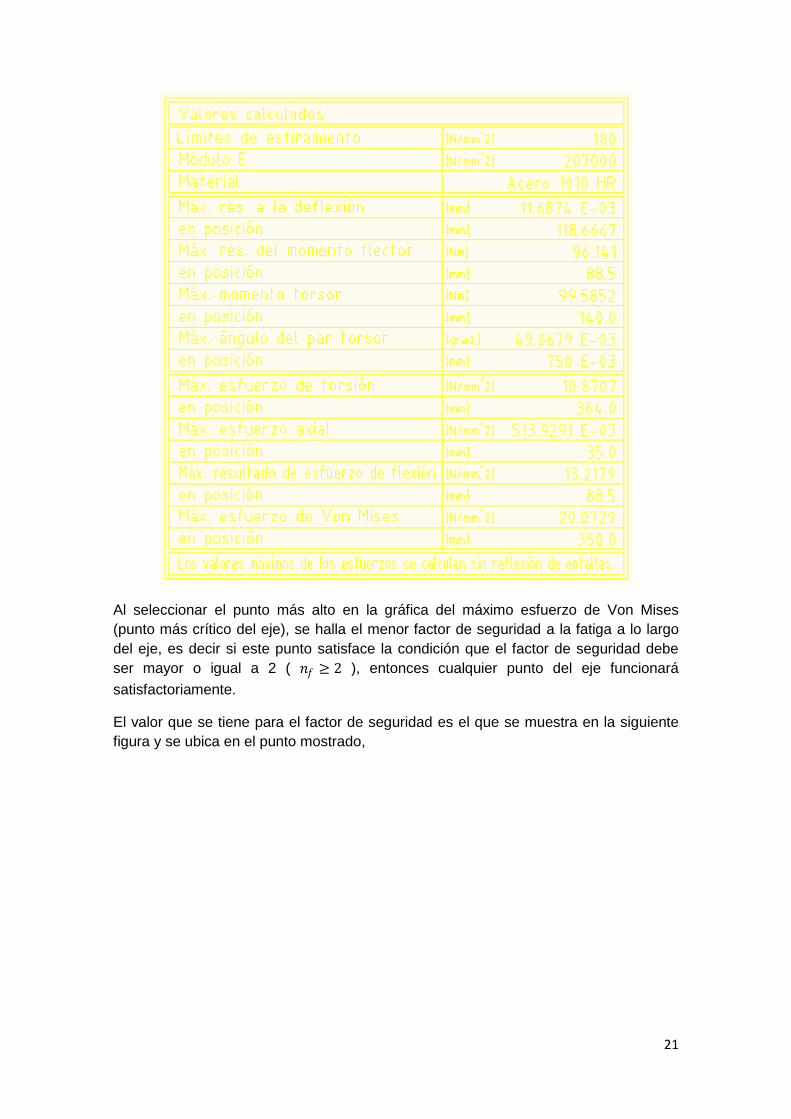
21
Al seleccionar el punto más alto en la gráfica del máximo esfuerzo de Von Mises
(punto más crítico del eje), se halla el menor factor de seguridad a la fatiga a lo largo
del eje, es decir si este punto satisface la condición que el factor de seguridad debe
ser mayor o igual a 2 ( 𝑛𝑓 ≥ 2 ), entonces cualquier punto del eje funcionará
satisfactoriamente.
El valor que se tiene para el factor de seguridad es el que se muestra en la siguiente
figura y se ubica en el punto mostrado,

22
Como 𝑛𝑓𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 6.178 ≥ 2 → 𝐶𝑢𝑚𝑝𝑙𝑒
Una vez definido esto, se concluye que bajo todos los criterios analizados hasta ahora
para el eje de entrada, este cumple con todas las condiciones. Por lo tanto se deben
elegir mediante el software Solid Edge los rodamientos necesarios, aunque como se
mostró anteriormente estos son rígidos de bolas.
3.2.2.1.5. Selección de rodamientos.
Rodamiento Fijo (izquierda), de modo tal que el eje funcione a compresión.
Se deben ingresar las cargas en el rodamiento fijo que corresponden a las cargas
encerradas en rojo, estas son tanto la resultante (Sum) como la fuerza axial que este
debe contrarrestar:
Figura 6
Estos valores se ingresan en Solid edge además de la velocidad del eje, así:

23
El diámetro en la sección donde va montado este rodamiento esta señalado con azul
(35 mm) y como se muestra en la parte superior el rodamiento es uno rígido de bolas.
Este rodamiento se elige debido a que cumple con los siguientes criterios:
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1 𝑚𝑚 ≥ 1𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 → 42 𝑚𝑚 ≥ 41.5 𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
Rodamiento Móvil (derecha)
La fuerza resultante y la axial son las encerradas en azul en la figura 6,

24
Debido a que este rodamiento es el móvil no tiene fuerza axial que deba contrarrestar,
y estará girando a las mismas RPM.
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1 𝑚𝑚 ≥ 1𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 → 50 𝑚𝑚 ≥ 50 𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒

25
El rodamiento de bolas rígido seleccionado por el software y un informe detallado
sobre el mismo, se muestra a continuación
Rodamiento fijo.
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6207
Inside Bearing Diameter d 35 mm
Outside Bearing Diameter D 72 mm
Bearing Width B 17 mm
Radius of Bearing Fillet or Chamfer r 1.1 mm
Min. Diameter of Shaft Shoulder damin 41.5 mm
Max. Diameter of Hub Shoulder Damax 65.5 mm
Max. Fillet Radius of Shoulder ramax 1 mm
Bearing Mass m 0.29 kg
Dynamic loading capacity of bearing 25500 N
Static loading capacity of bearing 15300 N

26
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 1547 N
Axial Load Fa 630.716 N
Bearing Speed n 1599 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 1996.47 N
Equivalent Static Load P0 1547 N
Static Safety Coefficcient s0 9.89
Power Loss by Friction Pz 8.78 W
Necessary Minimum Load Fmin 255 N
Calculated Bearing Life Lh 21718.79 hour
Coeffic. of Over-revolving kn 6.88
Copyright: (c) 2003 MechSoft, Inc.

27
Rodamiento móvil
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6009
Inside Bearing Diameter d 45 mm
Outside Bearing Diameter D 75 mm
Bearing Width B 16 mm
Radius of Bearing Fillet or Chamfer r 1 mm
Min. Diameter of Shaft Shoulder damin 50 mm
Max. Diameter of Hub Shoulder Damax 70 mm
Max. Fillet Radius of Shoulder ramax 1 mm
Bearing Mass m 0.25 kg
Dynamic loading capacity of bearing 20800 N
Static loading capacity of bearing 14600 N

28
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 1126 N
Axial Load Fa 0 N
Bearing Speed n 1599 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 1126 N
Equivalent Static Load P0 1126 N
Static Safety Coefficcient s0 12.97
Power Loss by Friction Pz 6.36 W
Necessary Minimum Load Fmin 208 N
Calculated Bearing Life Lh 65701.47 hour
Coeffic. of Over-revolving kn 6.88
Copyright: (c) 2003 MechSoft, Inc.
29
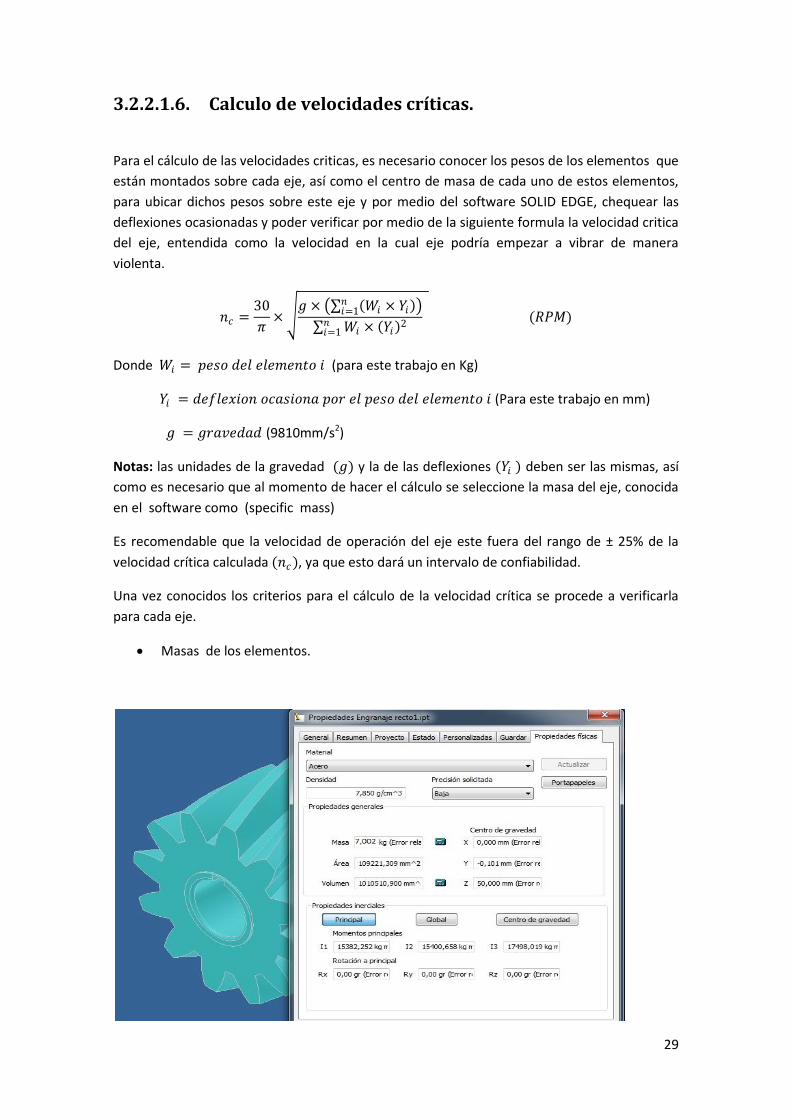
3.2.2.1.6. Calculo de velocidades críticas.
Para el cálculo de las velocidades criticas, es necesario conocer los pesos de los elementos que
están montados sobre cada eje, así como el centro de masa de cada uno de estos elementos,
para ubicar dichos pesos sobre este eje y por medio del software SOLID EDGE, chequear las
deflexiones ocasionadas y poder verificar por medio de la siguiente formula la velocidad critica
del eje, entendida como la velocidad en la cual eje podría empezar a vibrar de manera
violenta.
𝑛𝑐 =30
𝜋×
𝑔 × 𝑊𝑖 × 𝑌𝑖 𝑛𝑖=1
𝑊𝑖 × 𝑌𝑖 2𝑛
𝑖=1
(𝑅𝑃𝑀)
Donde 𝑊𝑖 = 𝑝𝑒𝑠𝑜 𝑑𝑒𝑙 𝑒𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑖 (para este trabajo en Kg)
𝑌𝑖 = 𝑑𝑒𝑓𝑙𝑒𝑥𝑖𝑜𝑛 𝑜𝑐𝑎𝑠𝑖𝑜𝑛𝑎 𝑝𝑜𝑟 𝑒𝑙 𝑝𝑒𝑠𝑜 𝑑𝑒𝑙 𝑒𝑙𝑒𝑚𝑒𝑛𝑡𝑜 𝑖 (Para este trabajo en mm)
𝑔 = 𝑔𝑟𝑎𝑣𝑒𝑑𝑎𝑑 (9810mm/s2)
Notas: las unidades de la gravedad (𝑔) y la de las deflexiones (𝑌𝑖 ) deben ser las mismas, así
como es necesario que al momento de hacer el cálculo se seleccione la masa del eje, conocida
en el software como (specific mass)
Es recomendable que la velocidad de operación del eje este fuera del rango de ± 25% de la
velocidad crítica calculada (𝑛𝑐), ya que esto dará un intervalo de confiabilidad.
Una vez conocidos los criterios para el cálculo de la velocidad crítica se procede a verificarla
para cada eje.
Masas de los elementos.

30
Deflexiones causadas por los elementos
Para calcular las deflexiones que ocasionan los pesos de los elementos es necesario tener las
masas de los elementos como fuerzas, por lo que se hace necesario multiplicar dichas masas
por la gravedad (9.81 m/s2), obteniendo lo siguiente.
Una vez ubicadas las fuerzas, se calcula y los resultados que se obtuvieron del software se
muestran en la siguiente figura.

31
Las deflexiones de cada elemento se muestran de manera más detallada en la siguiente figura.
De este modo los pesos y las deflexiones de los elementos de este eje son los siguientes.
La siguiente tabla muestra la velocidad crítica del eje de entrada, así como el rango crítico de
velocidades que servirá para verificar que la velocidad del eje no este dentro de dicho rango y
así garantizar un funcionamiento seguro.
Finalmente sabiendo que este eje trabaja bajo un régimen de 1599 RPM el cual está bastante
alejado del rango critico, se puede garantizar que este eje no fallara por velocidad critica.
VELOCIDAD CRITICA (RPM) LIMITE SUPERIOR (RPM) LIMITE INFERIOR (RPM) RANGO CRITICO (RPM)
EJE DE ENTRADA 32662,42903 40828,0 24496,8 (40828,0 - 24496,8)
ELEMENTOS DEFLEXION (mm) pesos (kg)
POLEA 0,000915 12,742
PIÑÓN HELICOIDAL 0,000199 7,002

32
3.2.2.1.7. Calculo de las chavetas.
Estas medidas servirán para la realización de las chavetas en los planos de taller de los ejes.
Chaveta piñón helicoidal.
Chaveta polea inducida.

33
3.2.2.2. Eje intermedio
3.2.2.2.1. Análisis por deformación y rigidez
Se tienen en cuenta las mismas consideraciones que para el eje anterior, de acuerdo a
las cargas o los elementos que tiene cada eje.
Fuerzas en la Rueda Helicoidal
Con base a las magnitudes calculadas para las fuerzas y las halladas para el piñón
helicoidal y teniendo en cuenta las direcciones de las cargas, mostradas con
anterioridad se tiene:
Al igual que en el caso anterior no se tuvo en cuenta el peso del eje y además se
considero como material para el eje un acero.

34
Las dimensiones del eje fueron cuidadosamente establecidas, sobretodo la distancia
entre rodamientos, primero con el fin de cumplir con el criterio de deflexión y además
de forma tal que este eje ensamble con el eje de entrada (piñón-rueda helicoidal).
Fuerzas en Piñón Recto
Las magnitudes se refieren a las calculadas para el eje del medio y las direcciones a la
figura presentada para el diseño mostrado piñón-rueda recta (figura 2).
Todas estas fuerzas se realizaron a una velocidad de eje de 799.5 RPM, con la
dirección de giro que se señaló cuando se consideraron la dirección de las fuerzas
(esquema 2), la velocidad de giro asì como su dirección.
Resultados por Deflexión
Tras ingresar los valores de las fuerzas el programa calcula los siguientes resultados:

35
Figura 7
La máxima deflexión entre soportes se obtiene de la siguiente figura:
Figura 8
Este valor 19.7438 um se debe comparar con la máxima deflexión que se calcula de la
siguiente manera, la distancia entre rodamientos y diámetro promedio del eje se
encuentran en la tabla 1.
3.2.2.2.1.1. Deflexión.
La distancia entre soportes es la siguiente.
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 (301.5) 𝑚𝑚
304.8 𝑚𝑚𝑝𝑖𝑒
= 0.9891 𝑝𝑖𝑒
Para ejes de maquinaria se admite deflexiones hasta de 0.001 𝑝𝑢𝑙𝑔
𝑝𝑖𝑒 de longitud de eje
entre soportes de cojinetes.
0.001𝑝𝑢𝑙𝑔
𝑝𝑖𝑒× 0.9891 𝑝𝑖𝑒 = 0.0009891 𝑝𝑢𝑙𝑔 ×
25.4 𝑚𝑚
1 𝑝𝑢𝑙𝑔×
1000 𝜇𝑚
1𝑚𝑚= 25.125 𝜇𝑚

36
De este modo la 𝒅𝒆𝒇𝒍𝒆𝒙𝒊ó𝒏 𝒑𝒆𝒓𝒎𝒊𝒕𝒊𝒅𝒂 = 25.125 𝜇𝑚 se compara con la mostrada en
la figura 8
𝑆𝑖 25.125 𝜇𝑚 > 19.7438𝜇𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.2.1.2. Rigidez
Se basa en que puede existir un ángulo de torsión hasta de 1° por 20 veces el
diámetro del eje; en razón de que los ejes son escalonados, es necesario determinar
un diámetro promedio del eje por medio de la siguiente formula.
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜𝑒𝑗𝑒𝑖𝑛𝑡𝑒𝑟𝑚𝑒𝑑𝑖𝑜 = 𝑑𝑖 × 𝑙𝑖
𝑙𝑖
En tabla 1 se muestra el diámetro promedio para este eje.
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜𝑒𝑗𝑒𝑖 𝑛𝑡𝑒𝑟𝑚𝑒𝑑𝑖𝑜 = 56.641 𝑚𝑚
Es necesario indicar que solo se toma en cuenta el tramo en el cual hay torsión.
Una vez que se tiene el diámetro promedio se cumple.
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 56.641𝑚𝑚 = 1132.82 𝑚𝑚
𝐾 → 1°
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 → 𝑋°
Despejando 𝑋°
𝑋° =1 × 301.5 𝑚𝑚
1132.82 𝑚𝑚= 0.2661
Y comparando este valor con el obtenido para el “angle of twist” (el cual se muestra en
la figura 7), hallado con el software se obtiene que:
𝑋° = 0.2661° > á𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡𝑤𝑖𝑠𝑡 = 0.0214𝑜 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.2.2. Deflexión y pendiente en las cargas.
Para garantizar la calidad de los montajes de engranajes, la deflexión no deberá
exceder de 0.005 pulg (0.127 mm) y la pendiente deberá limitarse a 0.0005 𝑝𝑢𝑙𝑔
𝑝𝑢𝑙𝑔
(0.0286°).

37
Son importantes los dos resultados debido a que en este eje se encuentran tanto la
rueda helicoidal como el piñón recto, y los resultados bajo este criterio se deben
analizar para los engranes (montajes de calidad).
Los resultados de la primera fila se ubican para la rueda helicoidal y los de la segunda
fila para el piñón recto.
𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.013876 𝑚𝑚 𝑦 0.016696𝑚𝑚 < 𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎
= 0.127𝑚𝑚 → 𝐶𝑢𝑚𝑝𝑙𝑒𝑛
𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.000149 𝑟𝑎𝑑 𝑦 0.000116𝑟𝑎𝑑 < 𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎
= 0.0005 𝑟𝑎𝑑 → 𝐶𝑢𝑚𝑝𝑙𝑒𝑛
3.2.2.2.3. Pendiente máxima en los rodamientos.
Se establece que los rodamientos son los rígidos de bolas, según lo expuesto con
anterioridad
Rodamiento θmáximo permitido
Rígido de bolas 0.004 rad
Del software se obtuvieron los siguientes pendientes,
A partir de este resultado se concluye que los rodamientos rígidos de bolas son
óptimos tanto para el soporte de la izquierda (móvil) y como para el soporte de la
derecha (fijo). Para definir cual soporte es fijo o móvil, se debe conocer la dirección de
la fuerza axial, de tal forma que el eje quede a compresión, consideración que se tuvo
en cuenta desde el esquema que se presento al principio del trabajo para el eje
intermedio (esquema 2).

38
3.2.2.2.4. Análisis por fatiga.
Este análisis se realiza en Autocad Mechanical y se hace uso de algunos resultados
obtenidos en el análisis anterior; de esta manera se dibuja el eje en el software y se
ubican las fuerzas en el centro de las chavetas como fuerzas.
En el lado izquierdo están ubicadas las fuerzas de la rueda helicoidal,
Las magnitudes de las fuerzas corresponden a las ingresadas en Solid Edge; y
Autocad calcula los momentos torsores y flectores automáticamente al ingresar el
desfase de la fuerza (Fz ó Fy), este desfase corresponde a los valores de Hz ó hy.
En el lado derecho del esquema del eje se ubican las fuerzas ejercidas por el piñón
recto

39
Es importante saber que como error del programa, se debe colocar un par torsor que
equilibre el eje, así:
El material que se elige para el análisis es un acero 1010 HRy este material se elegio
en razón de que SOLID EDGE arrojo una resistencia a la tracción de 17.1 Mpa (ver
figura 7), y se debe escoger uno con una resitencia a la tracción 6 veces mayor por lo
menos (102.6Mpa). Pero en razón de que ningún material recomendado para ejes
tiene una resistencia a la tracción tan bajo, se opto por escoger un 1010 HR que es el
que presenta menor resistencia a la tracción de todos los recomendados para ejes.
Sus características son las siguientes.
40
Tras haber ingresado las fuerzas y haber elegido el material se eligen las gráficas que
se requieren para determinar el factor de seguridad a la fatiga y los puntos donde se
presentan los mayores momentos flectores y la flexión resultante. El factor de
seguridad a la fatiga se calcula según el criterio de Von Mises.
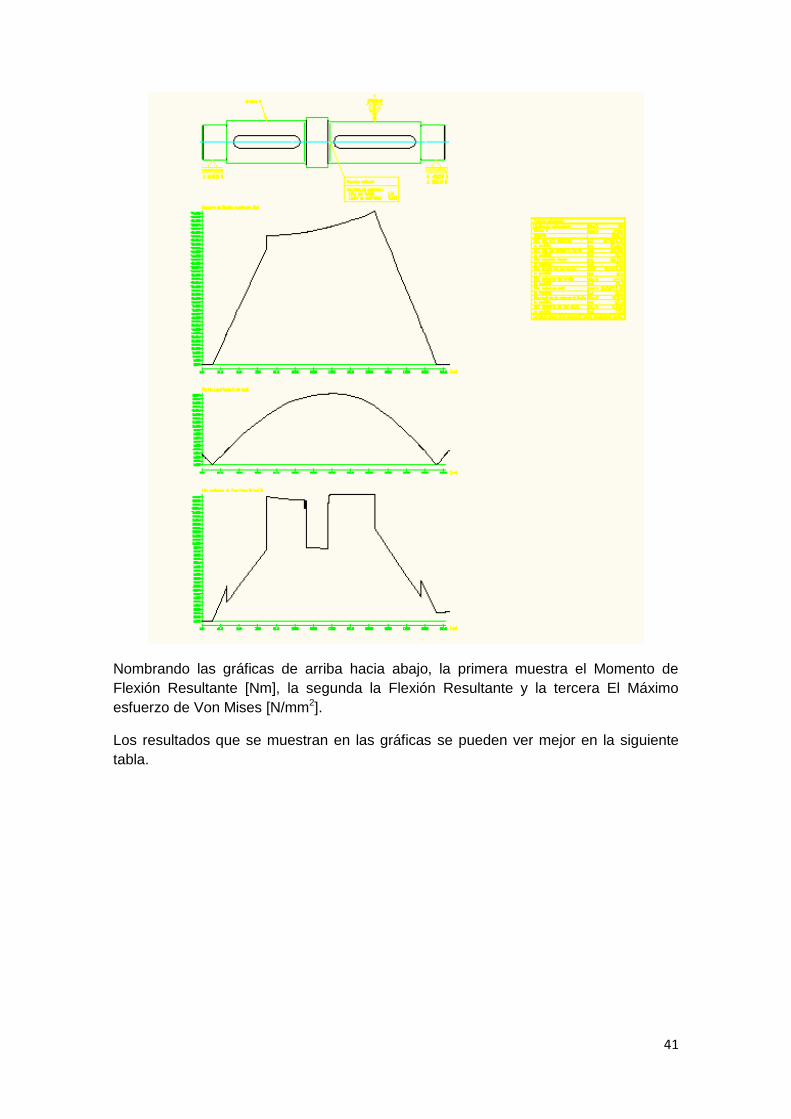
41
Nombrando las gráficas de arriba hacia abajo, la primera muestra el Momento de
Flexión Resultante [Nm], la segunda la Flexión Resultante y la tercera El Máximo
esfuerzo de Von Mises [N/mm2].
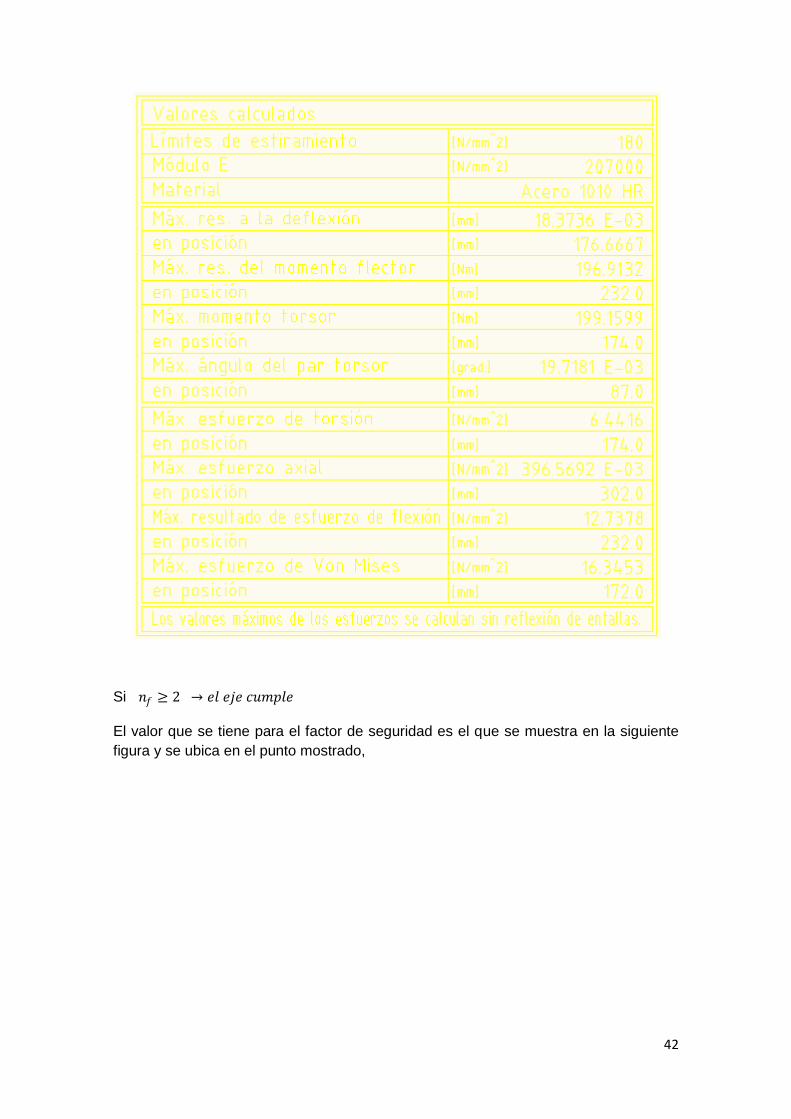
Los resultados que se muestran en las gráficas se pueden ver mejor en la siguiente
tabla.
42
Si 𝑛𝑓 ≥ 2 → 𝑒𝑙 𝑒𝑗𝑒 𝑐𝑢𝑚𝑝𝑙𝑒
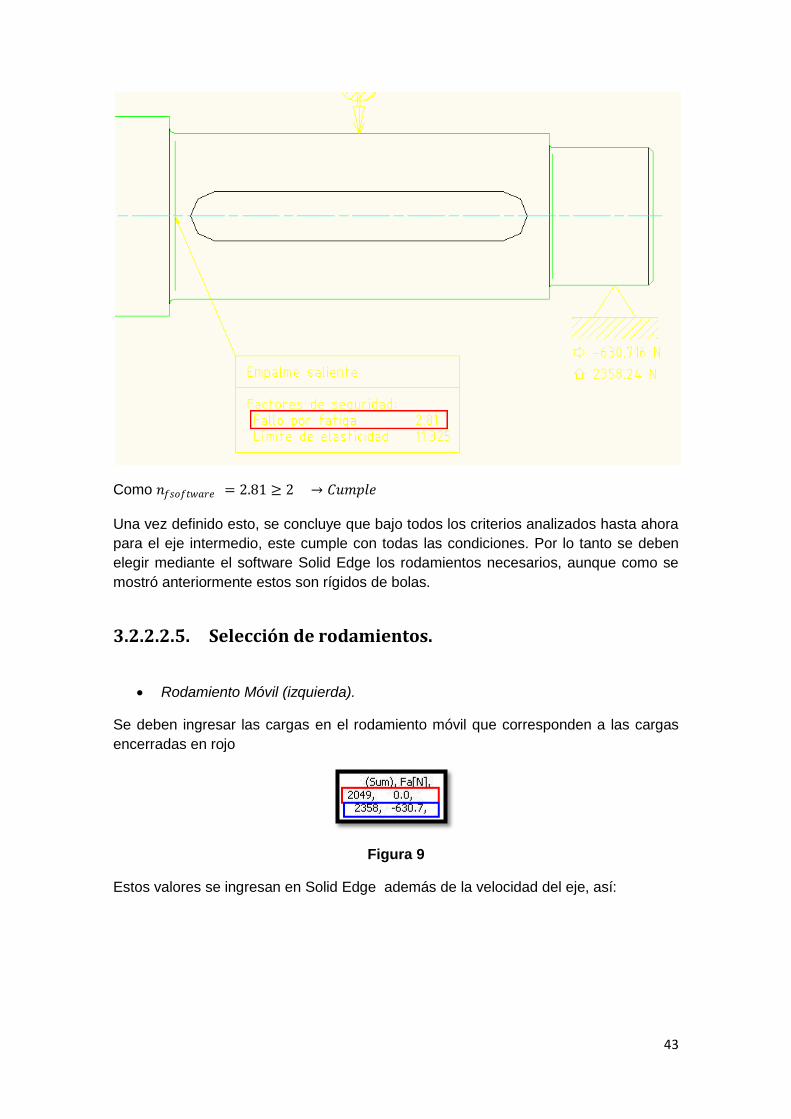
El valor que se tiene para el factor de seguridad es el que se muestra en la siguiente
figura y se ubica en el punto mostrado,
43
Como 𝑛𝑓𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 2.81 ≥ 2 → 𝐶𝑢𝑚𝑝𝑙𝑒
Una vez definido esto, se concluye que bajo todos los criterios analizados hasta ahora
para el eje intermedio, este cumple con todas las condiciones. Por lo tanto se deben
elegir mediante el software Solid Edge los rodamientos necesarios, aunque como se
mostró anteriormente estos son rígidos de bolas.
3.2.2.2.5. Selección de rodamientos.
Rodamiento Móvil (izquierda).
Se deben ingresar las cargas en el rodamiento móvil que corresponden a las cargas
encerradas en rojo
Figura 9
Estos valores se ingresan en Solid Edge además de la velocidad del eje, así:

44
El diámetro en la sección donde va montado este rodamiento esta señalado con azul
(45 mm) y como se muestra en la parte superior el rodamiento es uno rígido de bolas.
Este rodamiento se elige debido a que cumple con los siguientes criterios:
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1 𝑚𝑚 ≥ 1𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 55 𝑚𝑚 ≥ 50𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
Rodamiento Fijo (derecha, de modo tal que el eje funcione a compresión.
La fuerza resultante y la axial son las encerradas en azul en la figura 9.

45
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1 𝑚𝑚 ≥ 1𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 → 54 𝑚𝑚 ≥ 51.5 𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒

46
El rodamiento de bolas rígido seleccionado por el software y un informe detallado
sobre el mismo, se muestra a continuación
Rodamiento fijo.
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6209
Inside Bearing Diameter d 45 mm
Outside Bearing Diameter D 85 mm
Bearing Width B 19 mm
Radius of Bearing Fillet or Chamfer r 1.1 mm
Min. Diameter of Shaft Shoulder damin 51.5 mm
Max. Diameter of Hub Shoulder Damax 78.5 mm
Max. Fillet Radius of Shoulder ramax 1 mm
Bearing Mass m 0.41 kg
Dynamic loading capacity of bearing 33200 N
Static loading capacity of bearing 21600 N

47
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 2358 N
Axial Load Fa 630.716 N
Bearing Speed n 799.5 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 2546.59 N
Equivalent Static Load P0 2358 N
Static Safety Coefficcient s0 9.16
Power Loss by Friction Pz 7.2 W
Necessary Minimum Load Fmin 332 N
Calculated Bearing Life Lh 46191.88 hour
Coeffic. of Over-revolving kn 11.26
Copyright: (c) 2003 MechSoft, Inc.

48
Rodamiento móvil
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6009
Inside Bearing Diameter d 45 mm
Outside Bearing Diameter D 75 mm
Bearing Width B 16 mm
Radius of Bearing Fillet or Chamfer r 1 mm
Min. Diameter of Shaft Shoulder damin 50 mm
Max. Diameter of Hub Shoulder Damax 70 mm
Max. Fillet Radius of Shoulder ramax 1 mm
Bearing Mass m 0.25 kg
Dynamic loading capacity of bearing 20800 N
Static loading capacity of bearing 14600 N
49
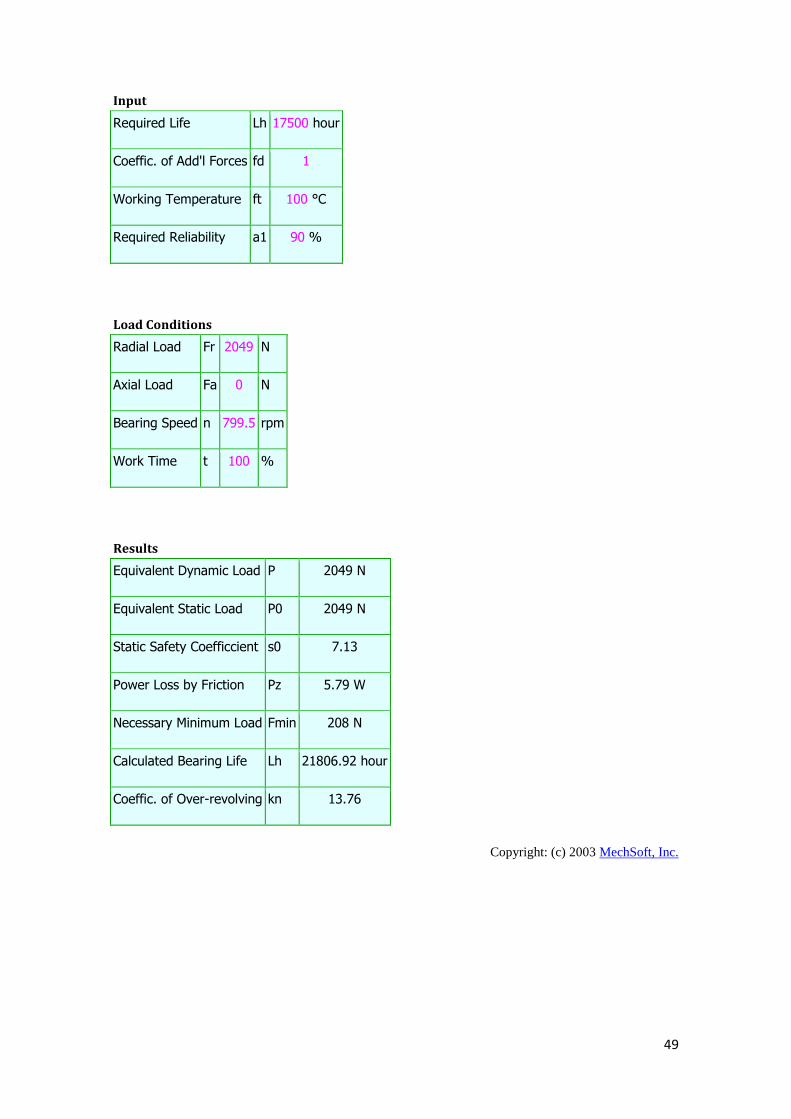
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 2049 N
Axial Load Fa 0 N
Bearing Speed n 799.5 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 2049 N
Equivalent Static Load P0 2049 N
Static Safety Coefficcient s0 7.13
Power Loss by Friction Pz 5.79 W
Necessary Minimum Load Fmin 208 N
Calculated Bearing Life Lh 21806.92 hour
Coeffic. of Over-revolving kn 13.76
Copyright: (c) 2003 MechSoft, Inc.

50
3.2.2.2.6. Calculo de velocidad crítica.
Masas de los elementos.
51
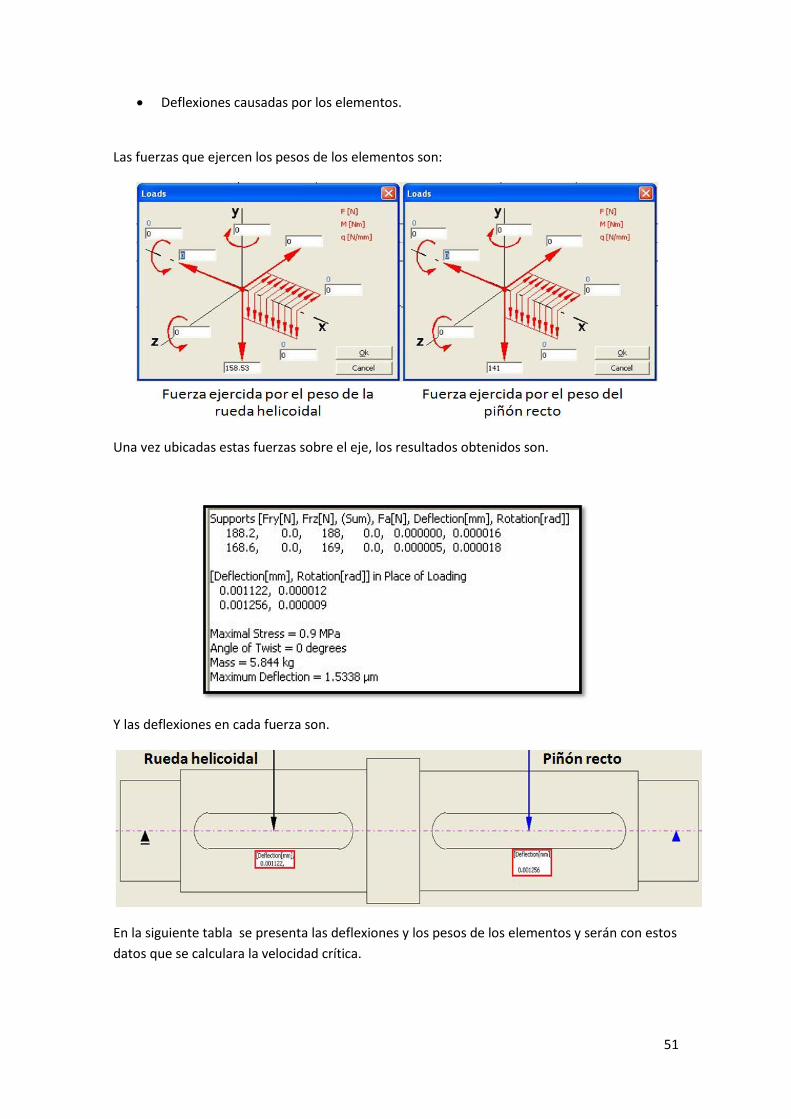
Deflexiones causadas por los elementos.
Las fuerzas que ejercen los pesos de los elementos son:
Una vez ubicadas estas fuerzas sobre el eje, los resultados obtenidos son.
Y las deflexiones en cada fuerza son.
En la siguiente tabla se presenta las deflexiones y los pesos de los elementos y serán con estos
datos que se calculara la velocidad crítica.

52
Una vez que se introducen dichos datos en la ecuación para velocidad crítica los resultados son
los siguientes.
De este modo sabiendo que este eje trabaja con un régimen de giro de 799.5 RPM y que el
rango critico que se muestra en la tabla es de (34289.6 – 20573.8)RPM, se puede garantizar
que este eje no fallara por velocidad critica.
3.2.2.2.7. Calculo de chavetas.
Estas medidas son las que aparecen en los planos de taller de los ejes.
Chaveta rueda helicoidal.
ELEMENTOS DEFLEXION (mm) pesos (kg)
RUEDA HELICOIDAL 0,001122 16,16
PIÑÓN RECTO 0,001256 14,37
VELOCIDAD CRITICA (RPM) LIMITE SUPERIOR (RPM) LIMITE INFERIOR (RPM) RANGO CRITICO (RPM)
EJE INTERMEDIO 27431,67222 34289,6 20573,8 (34289,6 - 20573,8)

53
Chaveta piñón recto.
3.2.2.3. Eje salida.
3.2.2.3.1. Análisis por deformación y rigidez.
Se tienen en cuenta las mismas consideraciones que para los ejes anteriores, de
acuerdo a las cargas o los elementos que tiene el eje de salida (rueda recta y
sprocket).
Fuerzas en la Rueda Recta

54
Con base a las magnitudes calculadas para las fuerzas y las halladas para la rueda
recta y teniendo en cuenta las direcciones de las cargas, mostradas con anterioridad
en el esquema 3 se tiene:
No se tuvo en cuenta el peso del eje y además se considero como material para el eje
un acero.
Las dimensiones del eje fueron cuidadosamente establecidas, sobretodo la distancia
entre rodamientos, primero con el fin de cumplir con el criterio de deflexión y además
de forma tal que este eje ensamble con el eje de entrada (piñón-rueda recta).
Fuerzas en Sprocket
La magnitud de la fuerza se tiene con respecto a la resultante hallada en el cálculo de
las fuerzas al igual que el momento torsor, y la dirección de acuerdo a la ubicación de
la máquina (Molino de Martillos) y dichas fuerzas se ilustraron en el esquema 3.

55
Todas estas fuerzas se realizaron a una velocidad de eje de 399.75 RPM, con la
dirección de giro que se señaló cuando se consideraron la dirección de las fuerzas
(esquema 3), la velocidad de giro así como su dirección.
Resultados por Deflexión
Tras ingresar los valores de las fuerzas el programa calcula los siguientes resultados:
Figura 10
La máxima deflexión entre soportes se muestra en la siguiente figura:

56
Figura 11
Este valor 22.8365 μm se debe comparar con la máxima deflexión que se calcula de la
siguiente manera, la distancia entre rodamientos y diámetro promedio del eje se
encuentran en la tabla 1
3.2.2.3.1.1. Deflexión.
La distancia entre soportes es la siguiente.
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 (300) 𝑚𝑚
304.8 𝑚𝑚𝑝𝑖𝑒
= 0.9842 𝑝𝑖𝑒
Para ejes de maquinaria se admite deflexiones hasta de 0.001 𝑝𝑢𝑙𝑔
𝑝𝑖𝑒 de longitud de eje
entre soportes de cojinetes.
0.001𝑝𝑢𝑙𝑔
𝑝𝑖𝑒× 0.9842 𝑝𝑖𝑒 = 0.0009842 𝑝𝑢𝑙𝑔 ×
25.4 𝑚𝑚
1 𝑝𝑢𝑙𝑔×
1000 𝜇𝑚
1𝑚𝑚= 25 𝜇𝑚
De este modo la 𝒅𝒆𝒇𝒍𝒆𝒙𝒊ó𝒏 𝒑𝒆𝒓𝒎𝒊𝒕𝒊𝒅𝒂 = 25 𝜇𝑚 se compara con la mostrada en la
figura 11
𝑆𝑖 25𝜇𝑚 > 22.8365 𝜇𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.3.1.2. Rigidez.
Se basa en que puede existir un ángulo de torsión hasta de 1° por 20 veces el
diámetro del eje; en razón de que los ejes son escalonados, es necesario determinar
un diámetro promedio del eje por medio de la siguiente formula.

57
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜𝑒𝑗𝑒𝑖𝑛𝑡𝑒𝑟𝑚𝑒𝑑𝑖𝑜 = 𝑑𝑖 × 𝑙𝑖
𝑙𝑖
En tabla 1 se muestra el diámetro promedio para este eje.
𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜𝑒𝑗𝑒𝑖𝑛𝑡𝑒𝑟𝑚𝑒𝑑𝑖𝑜 = 69.051 𝑚𝑚
Es necesario indicar que solo se toma en cuenta el tramo en el cual hay torsión.
Una vez que se tiene el diámetro promedio se cumple.
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 𝑑𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜
𝜃𝑎𝑑𝑚𝑖𝑡𝑖𝑑𝑜 = 20 × 69.051 𝑚𝑚 = 1381.02 𝑚𝑚
𝐾 → 1°
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑟𝑜𝑑𝑎𝑚𝑖𝑒𝑛𝑡𝑜𝑠 → 𝑋°
Despejando 𝑋°
𝑋° =1 × 300 𝑚𝑚
1381.02 𝑚𝑚= 0.2172
Y comparando este valor con el obtenido para el “angle of twist” (el cual se muestra en
la figura 10), hallado con el software se obtiene que:
𝑋° = 0.2172° > á𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡𝑤𝑖𝑠𝑡 = 0.0549𝑜 → 𝑐𝑢𝑚𝑝𝑙𝑒
3.2.2.3.2. Deflexión y pendiente en las cargas.
Para garantizar la calidad de los montajes de engranajes, la deflexión no deberá
exceder de 0.005 pulg (0.127 mm) y la pendiente deberá limitarse a 0.0005 𝑝𝑢𝑙𝑔
𝑝𝑢𝑙𝑔
(0.0286°).
El resultado que se debe verificar es el de la rueda recta, encerrada con azul en la
figura anterior, debido a que dicho criterio solo aplica para montaje de engranajes.
𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.047621 𝑚𝑚 < 𝐷𝑒𝑓𝑙𝑒𝑥𝑖ó𝑛 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎 = 0.127𝑚𝑚
→ 𝐶𝑢𝑚𝑝𝑙𝑒
𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 0.000468 𝑟𝑎𝑑 < 𝑃𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑝𝑒𝑟𝑚𝑖𝑡𝑖𝑑𝑎 = 0.0005 𝑟𝑎𝑑
→ 𝐶𝑢𝑚𝑝𝑙𝑒

58
3.2.2.3.3. Pendiente máxima en los rodamientos.
Se establece que los rodamientos son los rígidos de bolas, según lo expuesto con
anterioridad
Rodamiento θmáximo permitido
Rígido de bolas 0.004 rad
Del software se obtuvieron los siguientes pendientes,
A partir de este resultado se concluye que los rodamientos rígidos de bolas son
óptimos para el soporte de la derecha como para el de la izquierda.
3.2.2.3.4. Análisis por fatiga
Este análisis se realiza en Autocad Mechanical y se hace uso de algunos resultados
obtenidos en el análisis anterior; de esta manera se dibuja el eje en el software y se
ubican las fuerzas en el centro de las chavetas, excepto la fuerza del sprocket que
está situada hacia el lado izquierdo de la chaveta debido a que este elemento tiene el
cubo hacia el lado derecho (cubo descentrado) y los dientes del sprocket están
entonces hacia el lado izquierdo y es sobre estos que actúan las fuerzas.
En el lado izquierdo están ubicadas las fuerzas del sprocket,

59
Fuerza
Para ubicar estas fuerzas fue necesario encontrar el centro de gravedad de este
sprocket, el cual está localizado a (17.694 mm) del extremo izquierdo del sprocket.
Momento Torsor.
En el lado derecho del esquema del eje se ubican las fuerzas ejercidas por la rueda
recta
Estas fuerzas son de igual magnitud para la rueda recta que las ingresadas para el
piñón recto (acción – reacción)

60
Es importante saber que como error del programa, se debe colocar un par torsor que
equilibre el eje como se mostró para el eje intermedio, este procedimiento como se
explicó, es válido para los tres ejes.
El material que se elige para el análisis es un acero 1040 HR, debido a que al hacer
varios análisis con otros aceros, un acero de menor rango no proporcionaba un factor
de seguridad a la fatiga mayor o igual a 2, el acero 1040 HR tiene las siguientes
características
El valor para la Resistencia a la Tracción y el límite de elasticidad se hallaron de la
tabla E-20 [1]
Tras haber ingresado las fuerzas y haber elegido el material se eligen las gráficas que
se requieren para determinar el factor de seguridad a la fatiga y los puntos donde se
presentan los mayores momentos flectores y la flexión resultante. El factor de
seguridad a la fatiga se calcula según el criterio de Von Mises.

61
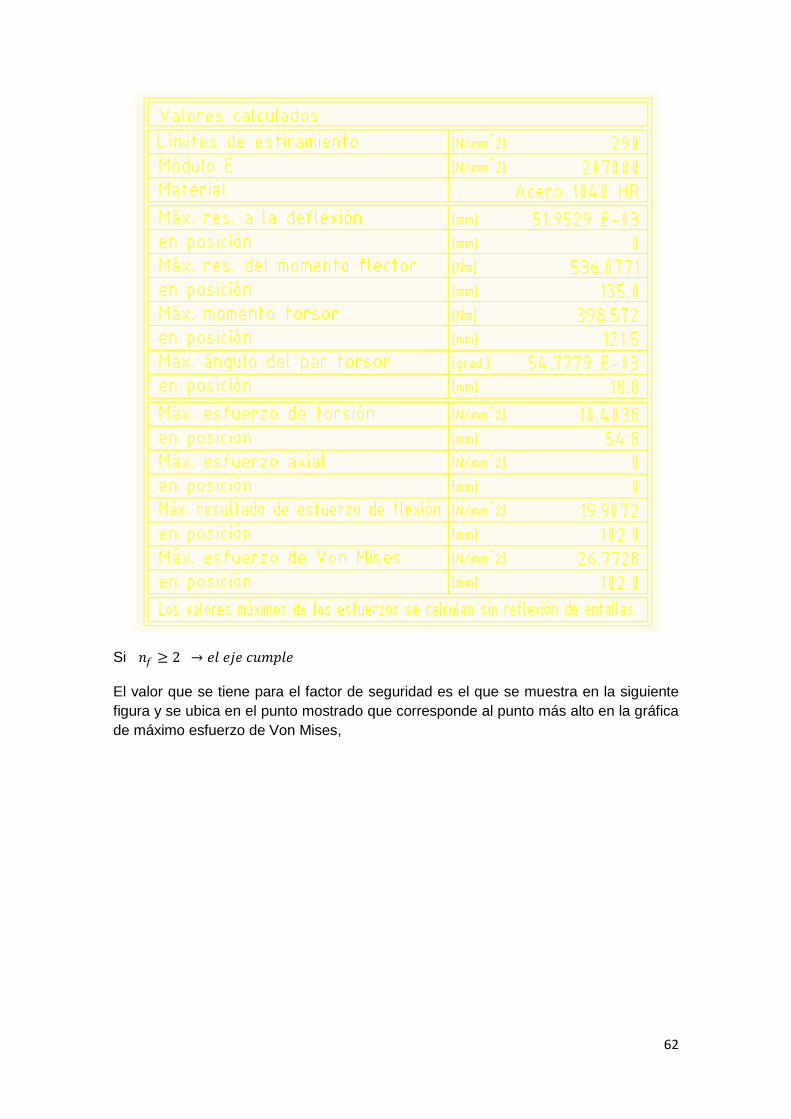
Nombrando las gráficas de arriba hacia abajo, la primera muestra el Momento de
Flexión Resultante [Nm], la segunda la Flexión Resultante y la tercera El Máximo
esfuerzo de Von Mises [N/mm2].
Los resultados que se muestran en las gráficas se resumen en la siguiente tabla,
62
Si 𝑛𝑓 ≥ 2 → 𝑒𝑙 𝑒𝑗𝑒 𝑐𝑢𝑚𝑝𝑙𝑒
El valor que se tiene para el factor de seguridad es el que se muestra en la siguiente
figura y se ubica en el punto mostrado que corresponde al punto más alto en la gráfica
de máximo esfuerzo de Von Mises,

63
Como 𝑛𝑓𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 = 2.479 ≥ 2 → 𝐶𝑢𝑚𝑝𝑙𝑒
Una vez definido esto, se concluye que bajo todos los criterios analizados hasta ahora
para el eje salida, este cumple con todas las condiciones. Por lo tanto se deben elegir
mediante el software Solid Edge los rodamientos necesarios, aunque como se mostró
anteriormente estos son rígidos de bolas.
3.2.2.3.5. Selección de rodamientos.
Rodamiento Fijo (izquierda).
Se deben ingresar las cargas en el rodamiento fijo que corresponden a las cargas
encerradas en rojo
Figura 12
Estos valores se ingresan en Solid además de la velocidad del eje, así:

64
El diámetro en la sección donde va montado este rodamiento esta señalado con azul
(70 mm) y como se muestra en la parte superior el rodamiento es uno rígido de bolas.
Este rodamiento se elige debido a que cumple con los siguientes criterios:
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1.5 𝑚𝑚 ≥ 1.5𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 78 𝑚𝑚 ≥ 78𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒

65
Rodamiento Móvil (derecha)
La fuerza resultante y la axial son las encerradas en azul en la figura 12, y son las que
se introducen para calcular los rodamientos, así como las revoluciones del eje.
𝑟𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒 ≥ 𝑟𝑟𝑒𝑎𝑙 → 1 𝑚𝑚 ≥ 1𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒
𝐷𝑟𝑒𝑎𝑙 (𝑟𝑒𝑠𝑎𝑙𝑡𝑒 ) ≥ 𝐷𝑠𝑜𝑓𝑡𝑤𝑎𝑟𝑒𝑐 á𝑡𝑎𝑙𝑜𝑔𝑜 → 58 𝑚𝑚 ≥ 56.5 𝑚𝑚 → 𝑐𝑢𝑚𝑝𝑙𝑒

66
El rodamiento de bolas rígido seleccionado por el software y un informe detallado
sobre el mismo, se muestra a continuación
Rodamiento fijo.
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6214
Inside Bearing Diameter d 70 mm
Outside Bearing Diameter D 125 mm
Bearing Width B 24 mm
Radius of Bearing Fillet or Chamfer r 1.5 mm
Min. Diameter of Shaft Shoulder damin 78 mm
Max. Diameter of Hub Shoulder Damax 117 mm
Max. Fillet Radius of Shoulder ramax 1.5 mm
Bearing Mass m 1.05 kg
Dynamic loading capacity of bearing 60500 N
Static loading capacity of bearing 45000 N

67
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 5663 N
Axial Load Fa 0 N
Bearing Speed n 399.5 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 5663 N
Equivalent Static Load P0 5663 N
Static Safety Coefficcient s0 7.95
Power Loss by Friction Pz 12.44 W
Necessary Minimum Load Fmin 605 N
Calculated Bearing Life Lh 50869.61 hour
Coeffic. of Over-revolving kn 15.02
Copyright: (c) 2003 MechSoft, Inc.

68
Rodamiento móvil
Rolling Bearing Component Wizard (Version: 4.3.1012)
02-18-2010
Guide
Strength Calculation Type: Check Calculation - ISO
Lubrication Type: Oil
Bearing type: SKF,Rolling Bearing SKF
Bearing designation: 6210
Inside Bearing Diameter d 50 mm
Outside Bearing Diameter D 90 mm
Bearing Width B 20 mm
Radius of Bearing Fillet or Chamfer r 1.1 mm
Min. Diameter of Shaft Shoulder damin 56.5 mm
Max. Diameter of Hub Shoulder Damax 83.5 mm
Max. Fillet Radius of Shoulder ramax 1 mm
Bearing Mass m 0.46 kg
Dynamic loading capacity of bearing 35100 N
Static loading capacity of bearing 23200 N

69
Input
Required Life Lh 17500 hour
Coeffic. of Add'l Forces fd 1
Working Temperature ft 100 °C
Required Reliability a1 90 %
Load Conditions
Radial Load Fr 3764 N
Axial Load Fa 0 N
Bearing Speed n 399.5 rpm
Work Time t 100 %
Results
Equivalent Dynamic Load P 3764 N
Equivalent Static Load P0 3764 N
Static Safety Coefficcient s0 6.16
Power Loss by Friction Pz 5.91 W
Necessary Minimum Load Fmin 351 N
Calculated Bearing Life Lh 33830.19 hour
Coeffic. of Over-revolving kn 21.28
Copyright: (c) 2003 MechSoft, Inc.

70
3.2.2.3.6. Calculo de velocidad crítica
Masa de los elementos.

71
Deflexiones causadas por los elementos.
Las fuerzas que ejercen los pesos de los elementos sobre el eje son:
Las deflexiones ocasionadas por estos pesos sobre el eje se muestran en los siguientes
resultados:
De manera más detallada las deflexiones en cada carga se muestran en la siguiente figura.
Sintetizando los pesos y las deflexiones de cada elemento se muestran a continuación.
ELEMENTOS DEFLEXION (mm) pesos (kg)
RUEDA RECTA 0,001062 36,75
SPROCKET 0,00045 5,794

72
Estos valores son los que sirven para calcular la velocidad crítica, y los resultados son:
Para este eje el rango critico de velocidades es (36952.6-22171.6)RPM y la velocidad de
operación es de 399.75 RPM, por lo que se puede concluir que este eje tampoco fallara por
velocidad critica.
3.2.2.3.7. Calculo de chavetas
Estas dimensiones de las chavetas serán las que se utilizaran en el plano de fabricación del eje.
Calculo chaveta rueda recta.
VELOCIDAD CRITICA (RPM) LIMITE SUPERIOR (RPM) LIMITE INFERIOR (RPM) RANGO CRITICO (RPM)
EJE DE SALIDA 29562,10188 36952,6 22171,6 (36952,6 - 22171,6)

73
Calculo chaveta sprocket.

74
4. Conclusiones
El diseño de una flecha comienza después de mucho trabajo preliminar. El diseño de la propia máquina dictará que ciertos engranes, poleas, cojinetes y otros elementos que se tendrán que analizar, al menos parcialmente y determinar en forma tentativa en cuanto a su tamaño y espaciamiento.
Antes de diseñar un eje se deben tener claros los análisis y enfoques o criterios bajo los cuales la flecha debe funcionar satisfactoriamente (cumplir su función de manera confiable y segura).
El uso de los software es una herramienta que facilita el cálculo de los diferentes parámetros que garantizan el diseño de un eje confiable y seguro.
No existe una fórmula contundente para determinar la geometría de la flecha para cualquier situación de diseño dada. El mejor enfoque consiste en estudiar los diseños existentes para aprender cómo se han resuelto problemas similares.
La literatura comercial y los catálogos incluyen ilustraciones y recomendaciones que
propician una buena práctica.
Los ejes diseñados en el presente trabajo cumplen todos los parámetros de diseño,
bajo el sistema de carga, velocidades y solicitud de diseño del reductor estudiado.

75
5. Bibliografía y Cibergrafía
[1]. Richard G. Budynas, J. Keith Nisbett. Diseño en Ingeniería Mecánica de Shigley.
Octava Edición.
D.N. Reshétov. Atlas de Elementos de Máquinas y Mecanismos. Cuarta Edición.
SOFTWARE:
AUTOCAD MECHANICAL 2009
M-DESIGN
SOLID EDGE V. 17
AUTODESK INVENTOR 2009

76
ANEXOS

77
Información anillos de retención.

78
Información retenedores de aceite.