1. introducción al control automáticomaterias.fi.uba.ar/6653/material/02introduccion.pdf · 01...
TRANSCRIPT
01 Introducción.doc 1
1. Introducción al Control Automático 1. Introducción al Control Automático ______________________________1
1.1. Idea de Control ________________________________________________________________________________________________ 2 1.2. Objetivos del Control __________________________________________________________________________________________ 13 1.3. Historia _____________________________________________________________________________________________________ 17 1.4. Componentes del Lazo ________________________________________________________________________________________ 21 1.5. Tipos de Control ______________________________________________________________________________________________ 25 1.6. Ejemplos ____________________________________________________________________________________________________ 30
01 Introducción.doc 2
1.1. Idea de Control - tener el control - control sobre un automóvil - control de temperatura de una sala Bases de nuestro curso:
Necesidad del conocimiento del sistema o proceso a controlar Estudio de técnicas para el control
Cantidad muy grande de sistemas controlados en forma automática: Sistemas diseñados por el ser humano: control de velocidad, posición, nivel, temperatura En seres vivos control de presión de sangre, temperatura, cantidad de azúcar, diámetro de pupilas.
01 Introducción.doc 3
Control con realimentación: caso especial. ejemplo heladera o caldera

01 Introducción.doc 4
Históricamente se utilizaba el control automático para reemplazar tareas huma-nas Hoy es usado para: - aumento y constancia (repetitibilidad) en la calidad - mejor rendimiento - menor desperdicio y reprocesado de productos - menos contaminación - mayor margen de seguridad - menor consumo de energía Reducción de 2-10% en los costos operativos representan un monto anual muy importante.
01 Introducción.doc 5
- No es fácil controlar un proceso - La entrada afecta a la salida pero la salida afecta la entrada - Es fácil y barato obtener un control de bajo rendimiento Un control de alto rendimiento es caro y requiere: - conocimiento acabado del proceso - conocimiento de su dinámica - comprensión de la teoría de control - buenos sensores - computadoras rápidas Muchas veces no se sabe cuánto cuesta pasar de un control simple a uno más sofisticado Muchas veces no se sabe cuál es el beneficio de pasar de un control simple a uno más sofisticado
01 Introducción.doc 6
- ¿Cuáles son los impedimentos para lograr un buen control? • Hardware (no es un problema)
- comunicaciones rápidas - velocidad de procesamiento - flexibilidad - software amigable
• Sensores y Actuadores ( sí es un problema) - muchas veces no se comprende lo importante que es esto - a veces no existen sensores - o son muy lentos
• Tiempo (si) - se necesita muchas horas hombre calificadas para estudiar el problema - diseño, implementación, ajuste es tiempo calificado

01 Introducción.doc 7
• Cultura (si) - Nivel gerencial
o hay que demostrar que se gasta 100K$ para ahorrar 500K$/año o es difícil cuantificar y clasificar el beneficio o los gastos en control no se ven (algoritmos, líneas de código, teoría)
- Gente de Proceso y Control o el control no es fácil o se debe pensar más allá del pensamiento actual o a veces las herramientas de diseño no son fáciles de usar
- Operadores o el nuevo control no te va a echar, te va a hacer la vida más fácil o hay que hacer las cosas diferentes para conseguir mejores resultados
- Docentes o ir más a la práctica o unir la teoría sofisticada con la aplicación

01 Introducción.doc 8
El ingeniero de control pasará de diseñar controladores a diseñar procesos
01 Introducción.doc 9
Beneficios del Control - Baja escala: mejoras de bajo costo para muchos reguladores de bajo nivel
o gasto en educación básica de control o gasto de horas-hombres de personal de control y procesos
- Alta escala: cambios costosos para pocos lazos pero con un alto rendimiento. o regulación compleja o supervisión o optimización
- Recordar: hay que cuantificar los beneficios!! - Cálculo de la tasa de retorno. Deseable: < a un año

01 Introducción.doc 10
- ¿Cómo abordar un problema de control complejo? - Conformar un equipo de trabajo
o multidisciplinario: procesistas, controleros, instrumentistas, operadores, gerentes.
- - Definir la situación actual: o ¿qué comportamiento exactamente tenemos hoy en día? ¿cómo lo medi-
mos? - Listar las mejoras a introducir
o ¿cuál es la mínima mejora aceptable? - Cuantificar los beneficios
o ponerlos en cifras $$ o calcular la tasa de retorno
- Elegir un método de diseño y solución acorde o hay muchos para elegir o el método en sí no influye en el costo pero puede traer dolores de cabeza

01 Introducción.doc 11
- Implementación o pensar en una rápida prototipación para reducir costos y tiempo o pensar en herramientas para depuración (graficación, acceso a variables)
- Verificación de resultados o importante para futuros proyectos o escribir todo o hacerlo circular entre gerentes y supervisores

01 Introducción.doc 12
La industria tiene músculos
El control brinda la destreza para manejar esos músculos
01 Introducción.doc 13
1.2. Objetivos del Control Hacer que la salida (y) sea lo más próxima posible a una referencia (r) calculan-
do una señal de entrada (u). Se debe cumplir esto independiente de
- ed perturbaciones de entrada
- sd perturbaciones de salida
- G imprecisión en el conocimiento de la planta Ejemplo: "mantener el caudal de salida de una bomba teniendo en cuenta variaciones de fric-ción del fluido con la temperatura, variaciones del caudal de entrada, una medición poco precisa y que no se conoce exactamente las características de la bomba"
01 Introducción.doc 14
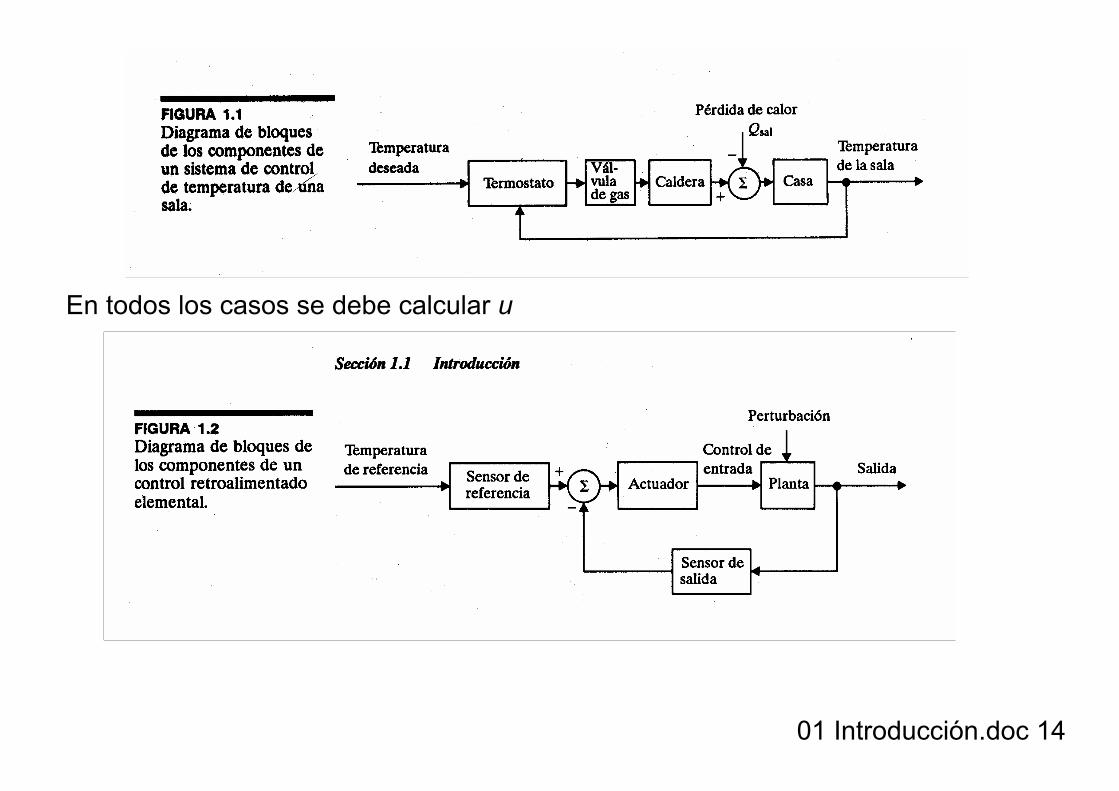
En todos los casos se debe calcular u

01 Introducción.doc 15
- Control con Realimentación Se usa para:
- Regulación: controlar un sistema para mantener una condición inicial o estado ce-ro
- Seguimiento de referencia: el sistema debe seguir una trayectoria con cierta espe-cificación. Muy común en sistemas mecánicos
- Rechazo de perturbaciones: el sistema debe ser inmune a variaciones de carga u otro tipo de cambios. Común en control de procesos.
- Generalmente se necesita una combinación de todas llegando a un compromiso. - El conocimiento del procesos es la clave para la solución de los problemas de
control - Utilizar la lógica para analizar los problemas - Describir los procesos en diagramas de bloques y modelos - La técnica de diseño del control (Ziegler-Nichols, LQG, H∞ ) es de relevancia se-
cundaria.
01 Introducción.doc 16
- Estabilidad un sistema es estable cuando es atraído y permanece en un punto de equilibrio
- Estabilidad marginal el sistema tiene una oscilación sostenida
- Inestabilidad - el sistema tiene una oscilación creciente o crece constantemente
- El control puede - estabilizar un sistema inestable o marginalmente estable - desestabilizar un sistema estable - mejorar la velocidad de respuesta - reducir el efecto de las perturbaciones - reducir el efecto de las incertidumbres
01 Introducción.doc 17
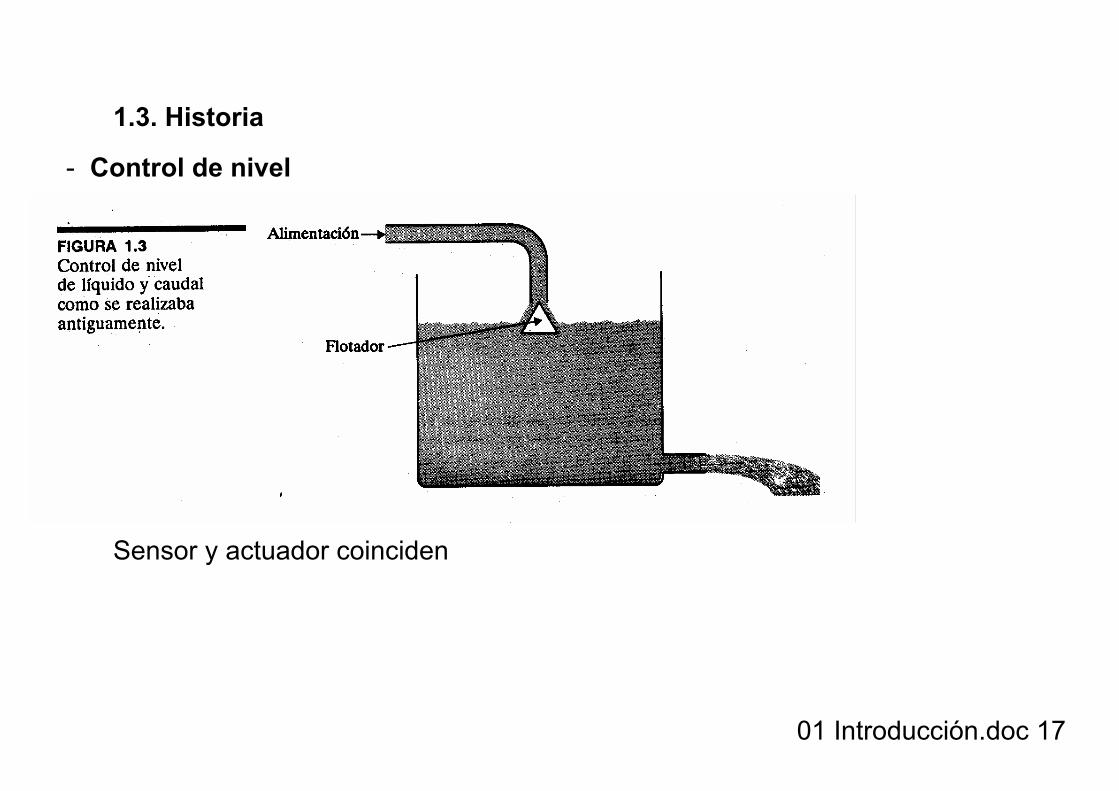
1.3. Historia
- Control de nivel
Sensor y actuador coinciden
01 Introducción.doc 18
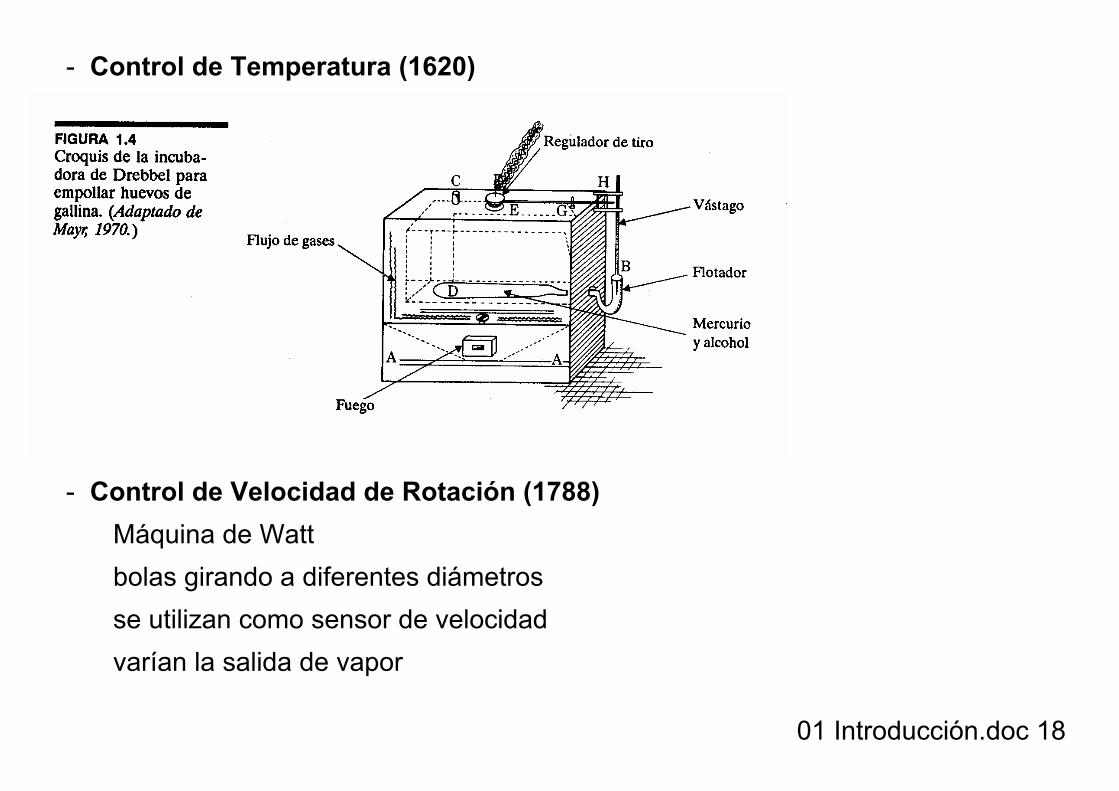
- Control de Temperatura (1620)
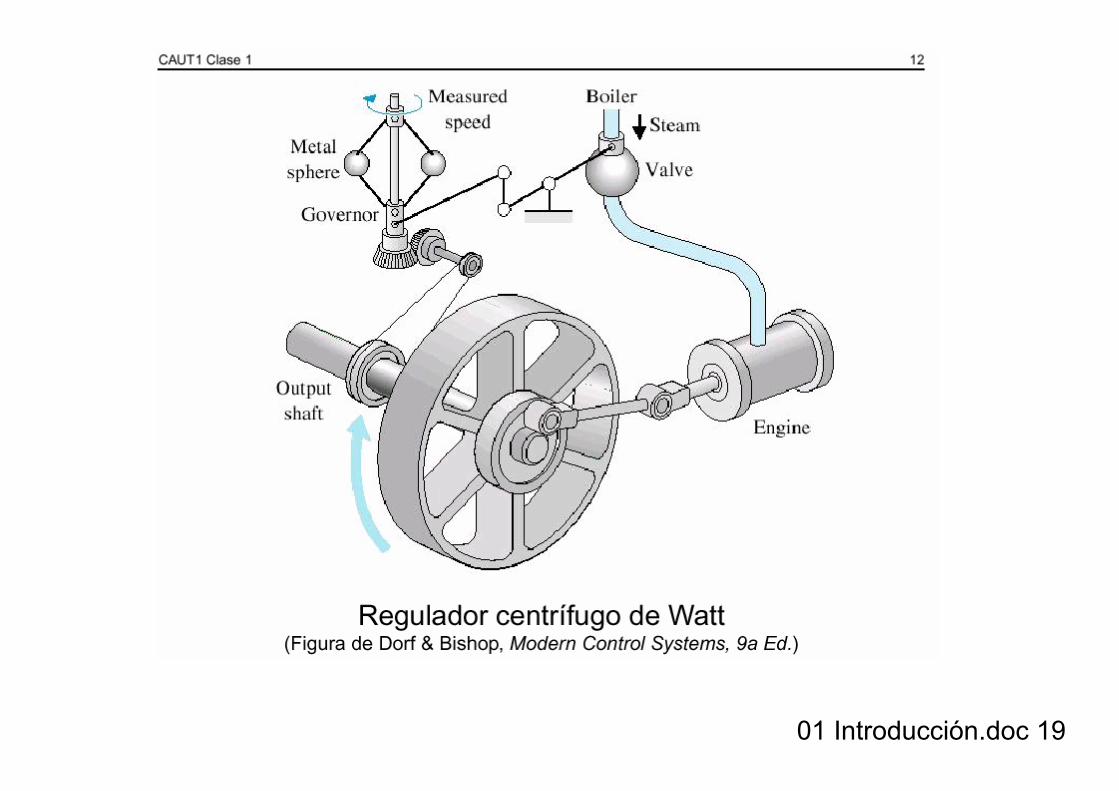
- Control de Velocidad de Rotación (1788) Máquina de Watt bolas girando a diferentes diámetros se utilizan como sensor de velocidad varían la salida de vapor
01 Introducción.doc 19

01 Introducción.doc 20
- Teoría J.C. Maxwell – 1868 – On Governors – ecuaciones diferenciales, linealización,
estabilidad, ecuación característica. E. J. Routh – 1877 – gana premio Adams con su criterio de estabilidad. A. M. Lyapunov – 1892 – estabilidad (recién se utilizó en control a partir de 1958) H. Nyquist – estabilidad en frecuencia H. W. Bode (1945) amplificadores realimentados – análisis frecuencial – impacto de las comunicaciones Callender (1936) PID para procesos industriales Wiener (1930) procesos estocásticos Kalman y Bellman 1950 – optimización y filtrado Pontryagin – variables de estados (edo) control óptimo Moscu – 1960 – nace IFAC AADECA – Argentina – 1960 - miembro fundador de IFAC

01 Introducción.doc 21
1.4. Componentes del Lazo
- Descripción de elementos: Planta Actuador Sensores Referencia Perturbación
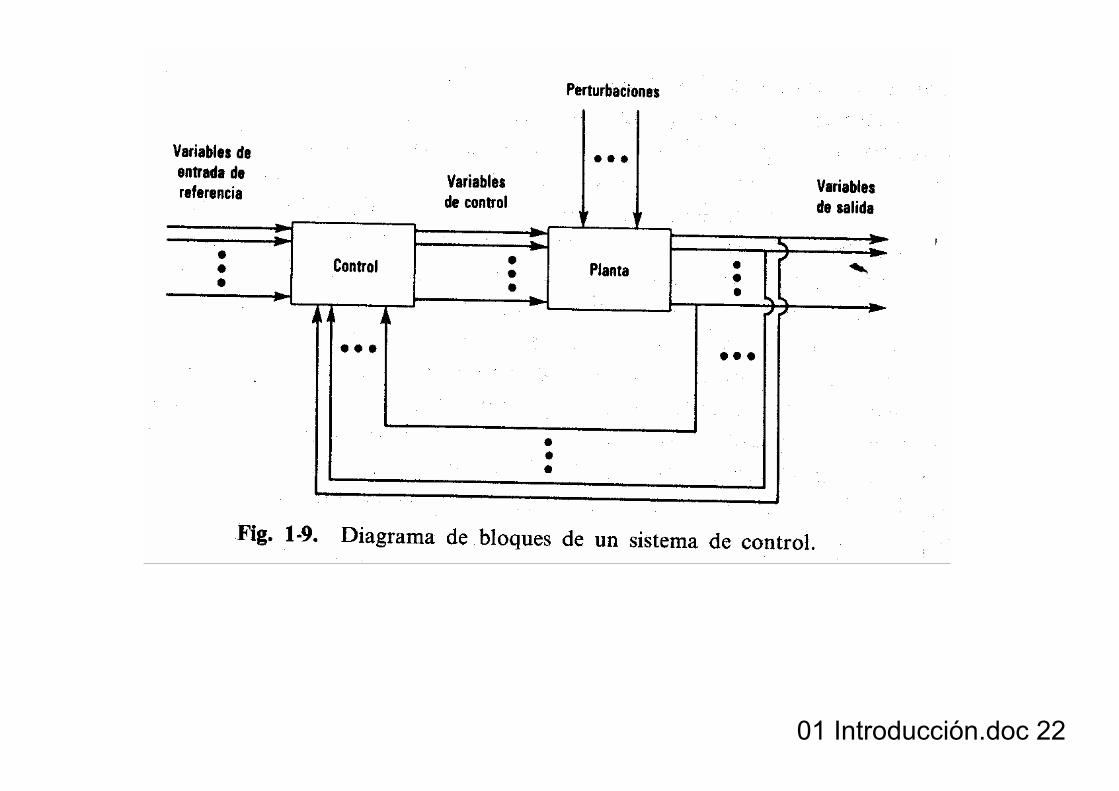
01 Introducción.doc 22

01 Introducción.doc 23
- Planta proceso o elemento a controlar
- Sistema conjunto de elementos que interactúan
- Entrada variable del sistema que es posible manejar
- Salida variable del sistema que es necesario comandar
- Referencia valor al cual debe llegar la salida
- Perturbación efecto que altera las condiciones de un proceso
- Sensor dispositivo que permite medir una magnitud

01 Introducción.doc 24
- Regulador elemento del sistema utilizado para generar la entrada del sistema.
01 Introducción.doc 25
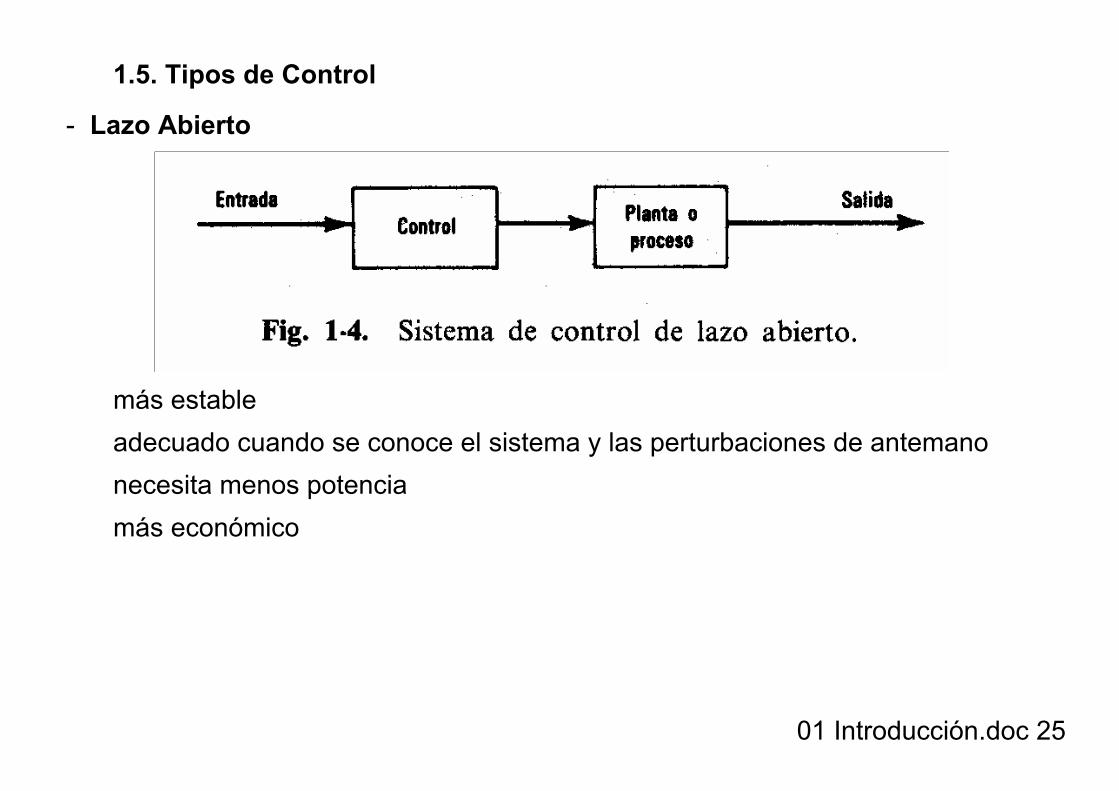
1.5. Tipos de Control
- Lazo Abierto
más estable adecuado cuando se conoce el sistema y las perturbaciones de antemano necesita menos potencia más económico

01 Introducción.doc 26
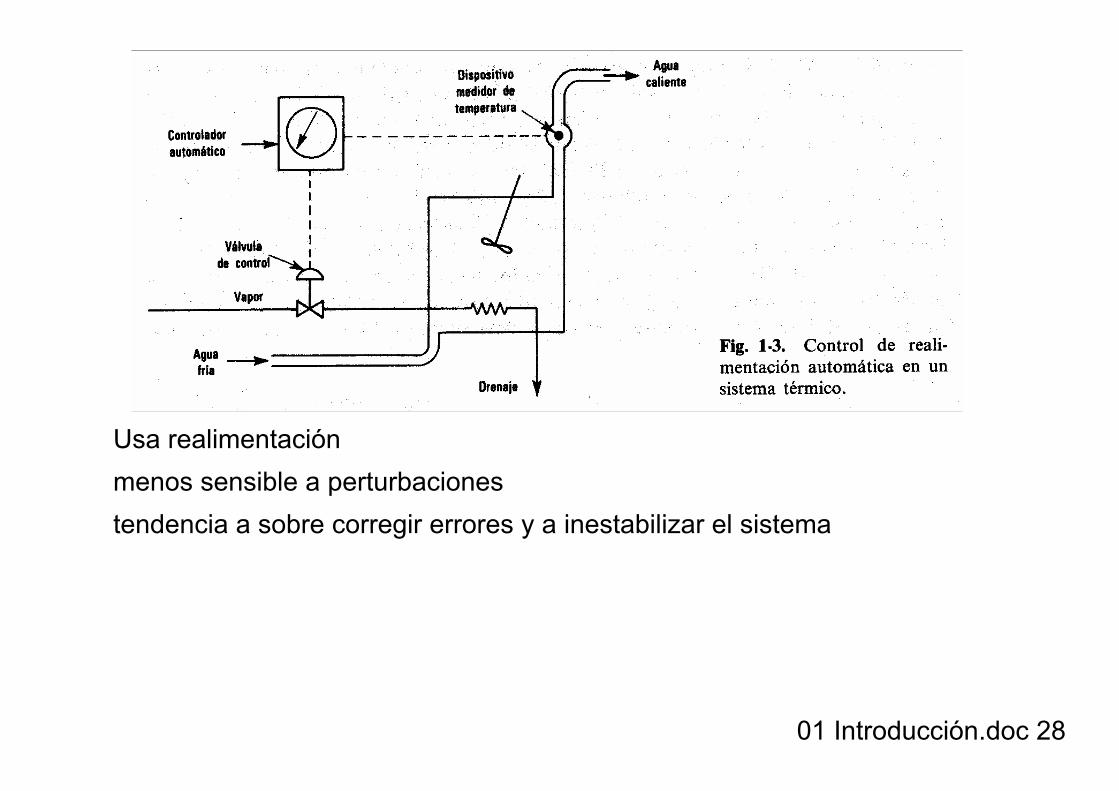
- Lazo Cerrado

01 Introducción.doc 27
01 Introducción.doc 28
Usa realimentación menos sensible a perturbaciones tendencia a sobre corregir errores y a inestabilizar el sistema
01 Introducción.doc 29
- Control Directo e Indirecto control directo: se controla directamente la variable que se desea corregir control indirecto: se controla otra variable que influye a la principal. Es mejor el control directo. Es importante la elección de las variables de control.
- Control Adaptativo se ajusta frente a cambios en la planta
- Control Con Aprendizaje aprende en forma heurística la ley de control
01 Introducción.doc 30
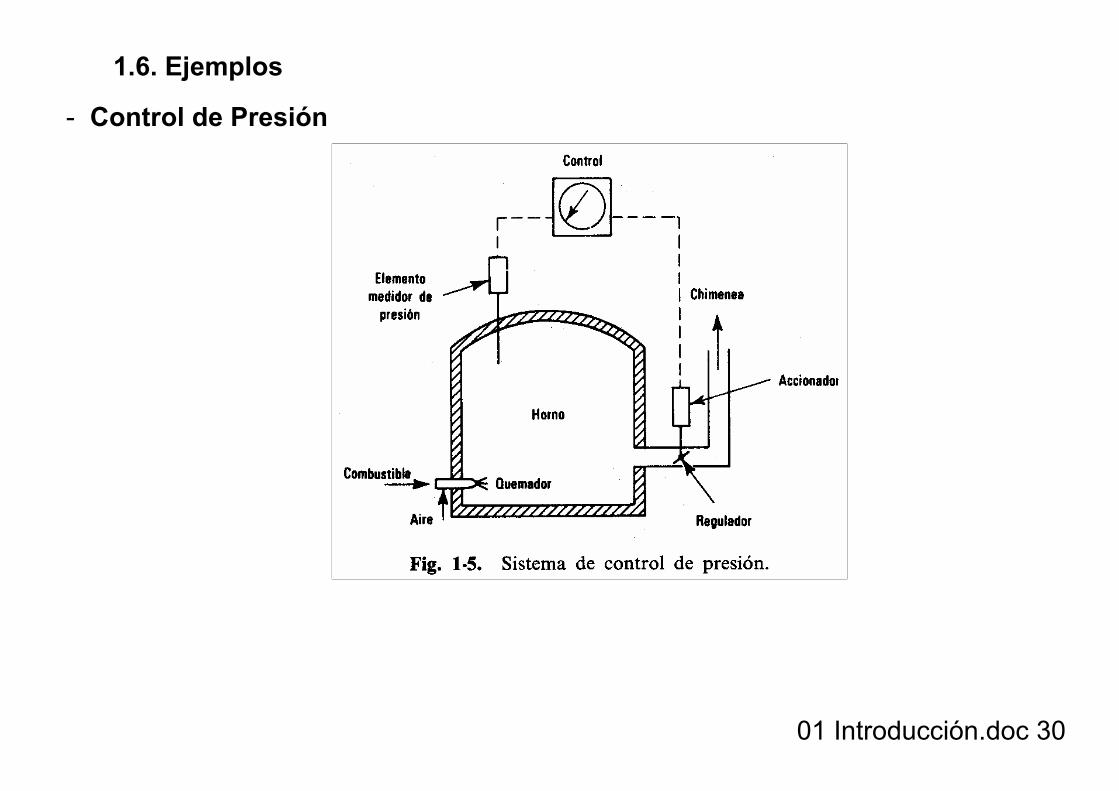
1.6. Ejemplos
- Control de Presión
01 Introducción.doc 31
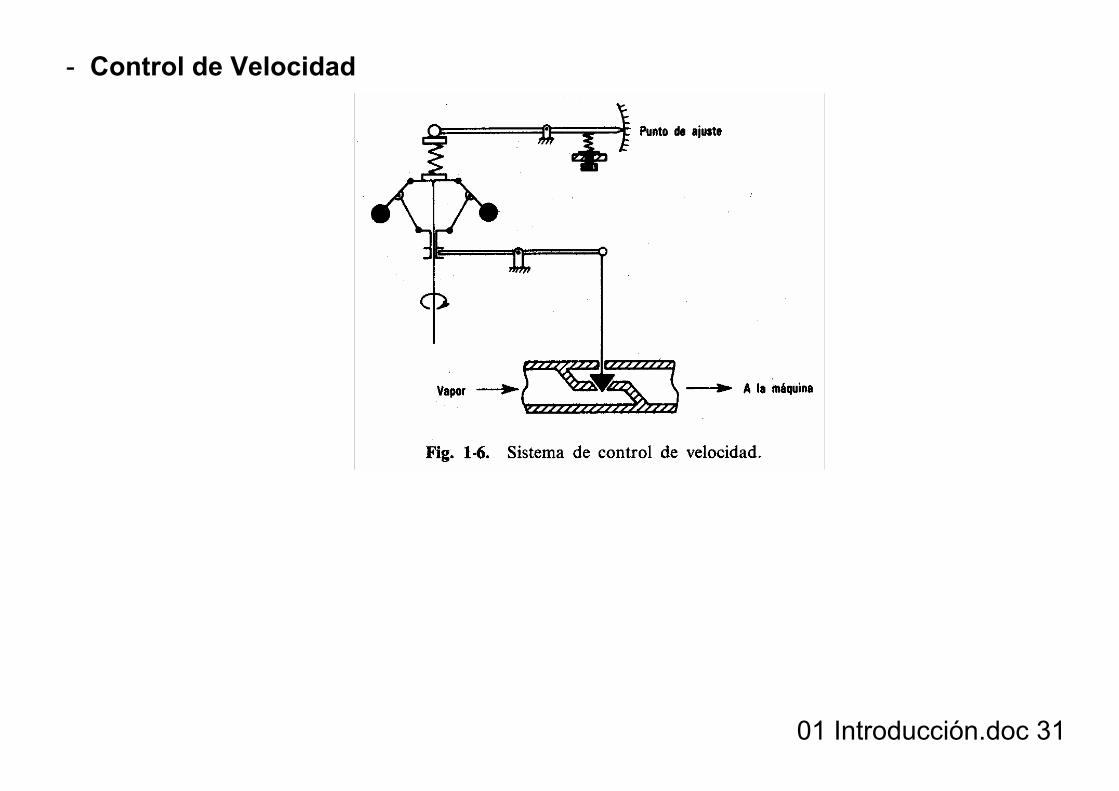
- Control de Velocidad

01 Introducción.doc 32
- Control Numérico

01 Introducción.doc 33
- Control Digital

01 Introducción.doc 34
- Control de Tráfico
- Control de Sistemas Biológicos
- Control de Sistemas Económicos