» syms c x y, haz='y^2-(x-c)*(x-2*c)^2' · web viewejemplo: ecuación de la viga de...
TRANSCRIPT
-1.2 -1.1 -1 -0.9 -0.8 -0.7 -0.6 -0.50
0.5
1
1.5
2
2.5
3
x
-acos((-3+1/2 exp(-2 x)) exp(x))
-0.5 0 0.5 1 1.5 2 2.5
0
0.5
1
1.5
2
2.5
3
x
-acos(1/2 (-1-2 cos(2)+exp(-2 x)) exp(x))
p 1E.T.S. DE INGENIEROS DE CAMINOS, C. Y P. UNIVERSIDAD DE CANTABRIAE.T.S. DE INGENIEROS DE CAMINOS, C. Y P. UNIVERSIDAD DE CANTABRIA
AMPLIACIÓN DE MATEMÁTICAS, 2º CURSO DE ITOPPRÁCTICAS DE LABORATORIO DE EDOs
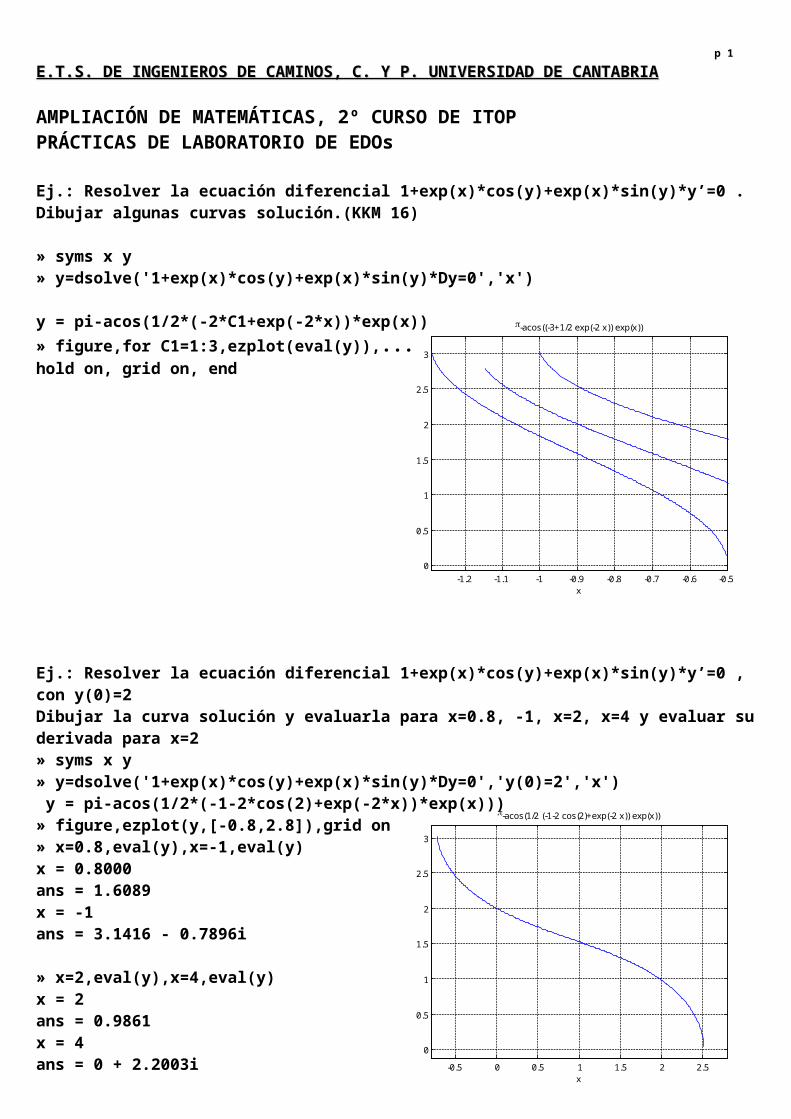
Ej.: Resolver la ecuación diferencial 1+exp(x)*cos(y)+exp(x)*sin(y)*y’=0 .Dibujar algunas curvas solución.(KKM 16)
» syms x y» y=dsolve('1+exp(x)*cos(y)+exp(x)*sin(y)*Dy=0','x')
y = pi-acos(1/2*(-2*C1+exp(-2*x))*exp(x))» figure,for C1=1:3,ezplot(eval(y)),...hold on, grid on, end
Ej.: Resolver la ecuación diferencial 1+exp(x)*cos(y)+exp(x)*sin(y)*y’=0 , con y(0)=2Dibujar la curva solución y evaluarla para x=0.8, -1, x=2, x=4 y evaluar su derivada para x=2» syms x y» y=dsolve('1+exp(x)*cos(y)+exp(x)*sin(y)*Dy=0','y(0)=2','x') y = pi-acos(1/2*(-1-2*cos(2)+exp(-2*x))*exp(x)))» figure,ezplot(y,[-0.8,2.8]),grid on» x=0.8,eval(y),x=-1,eval(y)x = 0.8000ans = 1.6089x = -1ans = 3.1416 - 0.7896i
» x=2,eval(y),x=4,eval(y)x = 2ans = 0.9861x = 4ans = 0 + 2.2003i
» Der1_y=diff(y,'x',1)
Der1_y = 2*(-exp(-2*x)*exp(x)+1/2*(-1-2*cos(2)+exp(-2*x))*exp(x))/(4-(-1-2*cos(2)+exp(-2*x))^2*exp(x)^2)^(1/2)» x=2;eval(Der1_y)ans = -0.8242
-2 0 2
0
2
4
6
8
10
12
x
5/4 x2
p 2
% * EJEMPLO DE TRAYECTORIAS ORTOGONALES
>> syms x y k;y=k*x^2 y = k*x^2
>> yprima=diff('k*x^2','x') yprima = 2*k*x>> k=solve('yprima=2*k*x','k') k = 1/2*yprima/x >> edif=subs('y-k*x^2=0','k',k) edif = y-1/2*yprima*x = 0>> edif_ortog=subs(edif,'yprima','-1/Dy') edif_ortog = y-1/2*(-1/Dy)*x = 0>> Dy=solve(edif_ortog,'Dy') Dy = -1/2/y*x>> y_ortog=dsolve('Dy =-1/2/y*x','x') y_ortog = [ 1/2*(-2*x^2+4*C1)^(1/2)][ -1/2*(-2*x^2+4*C1)^(1/2)]>> figure,for C1=1:6,ezplot(eval(y_ortog(1)),[-3,3]),axis square,…axis equal,hold on, grid on,end>> for k=0.25:0.25:1.25,ezplot(eval(y),[-3,3]),hold on, grid on,end
p 3Ejemplos con Matlab, clase Métodos Numéricos:______________________
Ej 22 hojas clase
>> dsolve('D2y*y=Dy^2+6*x*y^2','y(0)=1','Dy(0)=0','x')ans = exp(x^3) >> dsolve('D2y=Dy','y(0)=0','Dy(1)=1','x')ans = -1/exp(1)+1/exp(1)*exp(x)
>> sol=simplify(ans)sol = -exp(-1)+exp(x-1)
Ej libro Ex FinFeb 96
>> dsolve('D2y+(2/x)*Dy=0','y(1)=0','Dy(2)=1','x')ans = 4-4/x____________________
Exam Final MN Feb 02
>> misol=dsolve('x*D2y+(2*x-1)*Dy=-4*x^2','y(0)=0','Dy(1)=0','x')misol = -x^2+1/2/exp(-2)-1/2/exp(-2)*(2*exp(-2*x)*x+exp(-2*x)) >> misol=simple(misol)misol = -x^2+1/2*exp(2)-exp(2-2*x)*x-1/2*exp(2-2*x) RESUELTO COMO SISTEMA
>> misol=dsolve('Dy1=y2','Dy2=-(2*x-1)*y2/x-4*x','y1(0)=0','y2(1)=0','x')
misol = y1: [1x1 sym] y2: [1x1 sym]>> x=0.5; y0_5=eval(misol.y1), yprima_0_5=eval(misol.y2)y0_5 = 0.7262yprima_0_5 = 1.7183
>> simplify(misol.y1)ans = -x^2-x*exp(2-2*x)+1/2*exp(2)-1/2*exp(2-2*x) >> misol1=simplify(misol.y1)misol1 = -x^2-x*exp(2-2*x)+1/2*exp(2)-1/2*exp(2-2*x) >> misol.y1ans = -x^2-1/exp(-2)*exp(-2*x)*x+1/2/exp(-2)-1/2/exp(-2)*exp(-2*x) >> diff(misol1,'x')ans = -2*x+2*x*exp(2-2*x)
>> simplify(misol.y2)ans = 2*x*(-1+exp(2-2*x))
p 4Ex Sep 96, Feb 87, Hojas clase, Blasius
>> dsolve('z*D2z+2*D3z=0','z(0)=0','Dz(0)=0','D2z(0)=1/2','x')Warning: Explicit solution could not be found.> In C:\MATLAB6p5_Pablo030506\toolbox\symbolic\dsolve.m at line 326 ans = [ empty sym ] >>
Valor inicial, Sep 99
y''+9y=36exp(3x), y(0)=2, y'(0)=6, y exacta= 2exp(3x)
Directamente:
>> sol=dsolve('D2y+9*y=36*exp(3*x)','y(0)=2','Dy(0)=6','x') sol =(2*cos(3*x)*exp(3*x)+2*sin(3*x)*exp(3*x))*sin(3*x)+(2*cos(3*x)*exp(3*x)-2*sin(3*x)*exp(3*x))*cos(3*x) >> sol=simplify(sol) sol = 2*exp(3*x)
COMO SISTEMA:
>> misol=dsolve('Dy1=y2','Dy2=-9*y1+36*exp(3*x)','y1(0)=2','y2(0)=6','x')
misol =
y1: [1x1 sym] y2: [1x1 sym]
>> misol_1=simplify(misol.y1) misol_1 = 2*exp(3*x) >> misol_2=simplify(misol.y2) misol_2 = 6*exp(3*x) >> diff(misol_1,'x') ans = 6*exp(3*x) >>

p 5
EDO , problema de valor inicial (Problema de Cauchy)EDO 1er orden, explícita:y’= f(x,y), x [a,b], y(a)=α
Obsérvese que la EDO nos da las derivadas sucesivas de y respecto de x: y’(x)= f(x,y(x)),
y’’(x)= fx(x,y(x)) + fy(x,y(x))*dy/dx = y’’(x)= fx(x,y(x)) + fy(x,y(x))* f(x,y(x))
y’’’(x)= fxx+fxy*dy/dx+fyx*f +fyy*dy/dx*f+fy*fx+fy*fy*dy/dx =y’’’(x)= fxx+fxy*f + fyx*f +fyy*f*f+fy*fx+fy*fy*f =y’’’(x)= fxx + 2*fxy*f + fyy*f2 + fy*fx + fy
2*f
etc.
Resolución numérica PASO a PASO (métodos de Taylor, 1 paso)
y(c+h)= y(c)+ y’(c)*h/1! + y’’(c)*h2/2! + y’’’(c)*h3/3! ++ yiv(c)*h4/4! +...
y(c+h)= y(c)+ y’(c)*h/1! + y’’(c)*h2/2! + y’’’(c)*h3/3! ++ yiv(c)*h4/4! + Ο(h5)
ERROR ‘DE TRUNCATURA LOCAL’: Ο(h5)
Método de Taylor de orden 1 (Euler)yi+1= yi+ y’i*h/1! De la EDO, y’i= f(xi,yi)
yi+1= yi+ f(xi,yi)*h , i=0,1,2,... yi aproxima a y(xi)y0 = α Error Trunc Local: Ο(h2)
Método de Taylor de orden 2yi+1= yi+ y’i*h/1! + y’’i*h2/2!
De la EDO: y’i= f(xi,yi), y’’i= fx(xi,yi)+ fy(xi,yi)* f(xi,yi)
y0 = α i=0,1,2,... Error Trunc Local: Ο(h3)
x0=a x1 x2 ... xi xi+1 ...
...hh h
p 6
EDO , problema de valor inicial (Problema de Cauchy)EDO 1er orden, explícita:y’= f(x,y), x en [a,b], y(a)=α
Para evitar el cálculo de derivadas sucesivas de los métodos de Taylor: Métodos paso a paso (de 1 paso) de Runge-Kutta.
Algunos métodos de Runge–Kutta:
Orden 2 (Error de Truncatura Local: Ο(h3))
Método de la tangente media o Método de Euler mejorado:yi+1= yi+ [f(xi,yi)+f(xi+1,yi+h*f(xi,yi))]*h/2y0 = α i=0,1,2,...
Método de la tangente en el punto medio o Método de Euler modificado:yi+1= yi+ h*[f(xi+h/2,yi+(h/2)*f(xi,yi))]y0 = α i=0,1,2,...
Orden 4 (Error de Truncatura Local: Ο(h5))
Método de Runge Kutta ‘Clásico’ de orden 4:yi+1= yi+ (h/6)*(K1+2*K2+2*K3+K4)siendo:K1 = f(xi,yi)K2 = f(xi+(h/2),yi+(h/2)*K1)K3 = f(xi+(h/2),yi+(h/2)*K2)K4 = f(xi+h,yi+h*K3)
y0 = α i=0,1,2,...

p 7
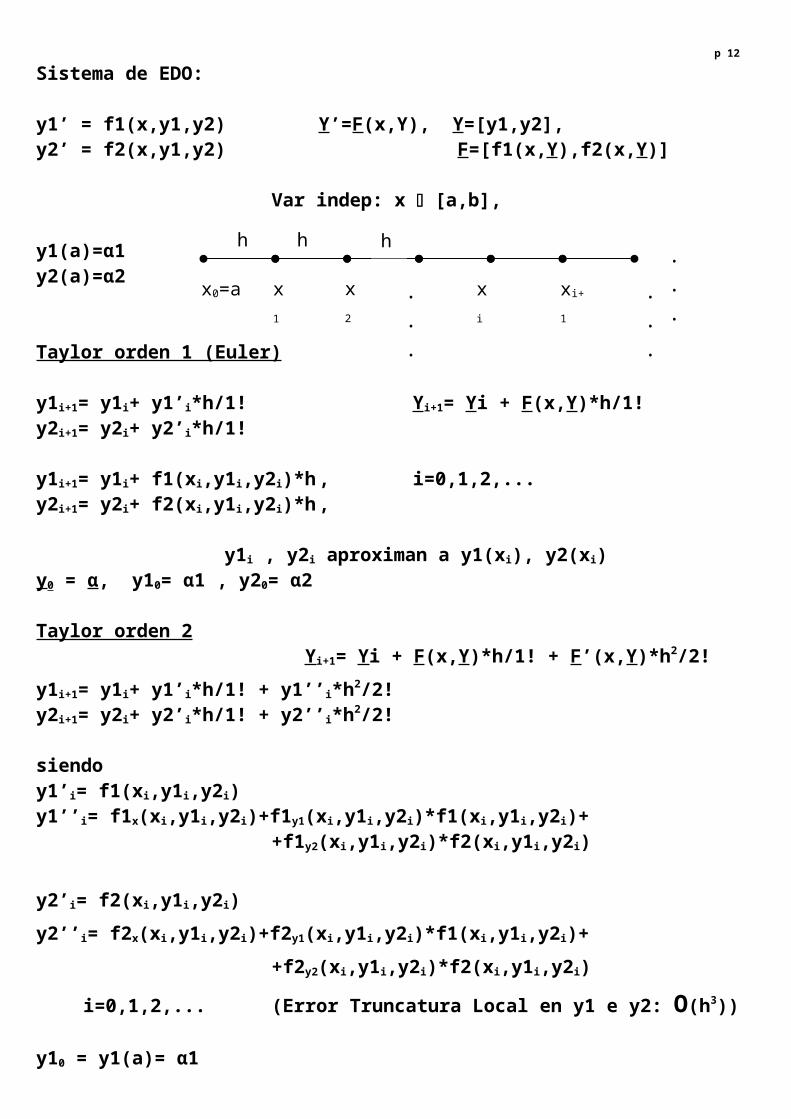
Sistema de EDO:
y1’ = f1(x,y1,y2) Y’=F(x,Y), Y=[y1,y2],y2’ = f2(x,y1,y2) F=[f1(x,Y),f2(x,Y)]
Var indep: x [a,b],
y1(a)=α1y2(a)=α2
Taylor orden 1 (Euler)
y1i+1= y1i+ y1’i*h/1! Yi+1= Yi + F(x,Y)*h/1!y2i+1= y2i+ y2’i*h/1!
y1i+1= y1i+ f1(xi,y1i,y2i)*h, i=0,1,2,...y2i+1= y2i+ f2(xi,y1i,y2i)*h,
y1i , y2i aproximan a y1(xi), y2(xi)y0 = α, y10= α1 , y20= α2
Taylor orden 2 Yi+1= Yi + F(x,Y)*h/1! + F’(x,Y)*h2/2!
y1i+1= y1i+ y1’i*h/1! + y1’’i*h2/2!y2i+1= y2i+ y2’i*h/1! + y2’’i*h2/2!
siendoy1’i= f1(xi,y1i,y2i)y1’’i= f1x(xi,y1i,y2i)+f1y1(xi,y1i,y2i)*f1(xi,y1i,y2i)+
+f1y2(xi,y1i,y2i)*f2(xi,y1i,y2i)
y2’i= f2(xi,y1i,y2i)y2’’i= f2x(xi,y1i,y2i)+f2y1(xi,y1i,y2i)*f1(xi,y1i,y2i)+
+f2y2(xi,y1i,y2i)*f2(xi,y1i,y2i)
i=0,1,2,... (Error Truncatura Local en y1 e y2: Ο(h3))
y10 = y1(a)= α1y20 = y2(a)= α2
x0=a x1 x2 ... xi xi+1 ...
...hh h
p 8
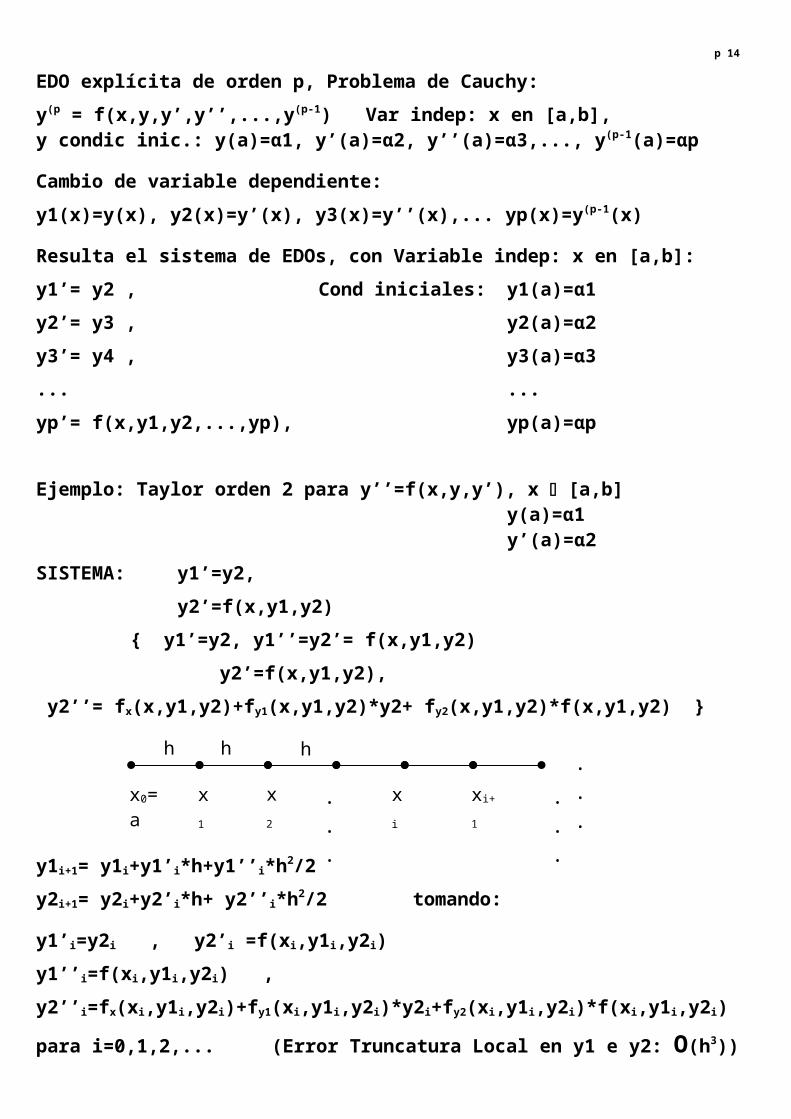
EDO explícita de orden p, Problema de Cauchy:y(p = f(x,y,y’,y’’,...,y(p-1) Var indep: x en [a,b],y condic inic.: y(a)=α1, y’(a)=α2, y’’(a)=α3,..., y(p-1(a)=αp
Cambio de variable dependiente:y1(x)=y(x), y2(x)=y’(x), y3(x)=y’’(x),... yp(x)=y(p-1(x)
Resulta el sistema de EDOs, con Variable indep: x en [a,b]:y1’= y2 , Cond iniciales: y1(a)=α1y2’= y3 , y2(a)=α2y3’= y4 , y3(a)=α3... ...yp’= f(x,y1,y2,...,yp), yp(a)=αp
Ejemplo: Taylor orden 2 para y’’=f(x,y,y’), x [a,b]y(a)=α1y’(a)=α2
SISTEMA: y1’=y2,y2’=f(x,y1,y2)
{ y1’=y2, y1’’=y2’= f(x,y1,y2) y2’=f(x,y1,y2),
y2’’= fx(x,y1,y2)+fy1(x,y1,y2)*y2+ fy2(x,y1,y2)*f(x,y1,y2) }
y1i+1= y1i+y1’i*h+y1’’i*h2/2y2i+1= y2i+y2’i*h+ y2’’i*h2/2 tomando:
y1’i=y2i , y2’i =f(xi,y1i,y2i)y1’’i=f(xi,y1i,y2i) ,y2’’i=fx(xi,y1i,y2i)+fy1(xi,y1i,y2i)*y2i+fy2(xi,y1i,y2i)*f(xi,y1i,y2i)
para i=0,1,2,... (Error Truncatura Local en y1 e y2: Ο(h3))
y10 = y1(a)= α1y20 = y2(a)= α2
x0=a x1 x2 ...
xi xi+1 ...
..
.
hh h
p 9
0 0.2 0.4 0.6 0.8 1 1.2 1.40.65
0.7
0.75
0.8
0.85
0.9
0.95
1
0 0.2 0.4 0.6 0.8 1 1.2 1.40.65
0.7
0.75
0.8
0.85
0.9
0.95
1
p 10% EjLab1basicoTaylor1, (Euler) paso a paso, basico% yi+1=yi+h*y'i% y'=x-y , x en [0,1.2], y(0)=1clear all,close allyexacta=inline('2*exp(-x)+x-1','x');yp=inline('x-y','x','y')x(1)=0;yaprox(1)=1;error(1)=0;h=0.1npasos=round(1.2/h);for i=1:npasos x(i+1)=x(i)+h; yaprox(i+1)=yaprox(i)+h*yp(x(i),yaprox(i));endyex=yexacta(x);error=yex-yaprox;[x',yaprox',yex',error']figure,plot(x,yaprox,'.r',x,yex,'bo'),grid on
RESULTADO: yp = Inline function: yp(x,y) = x-y
h = 0.1000ans = 0 1.0000 1.0000 0 0.1000 0.9000 0.9097 0.0097 0.2000 0.8200 0.8375 0.0175 0.3000 0.7580 0.7816 0.0236 0.4000 0.7122 0.7406 0.0284 0.5000 0.6810 0.7131 0.0321 0.6000 0.6629 0.6976 0.0347 0.7000 0.6566 0.6932 0.0366 0.8000 0.6609 0.6987 0.0377 0.9000 0.6748 0.7131 0.0383 1.0000 0.6974 0.7358 0.0384 1.1000 0.7276 0.7657 0.0381 1.2000 0.7649 0.8024 0.0375
% EjLab2basicoTaylor2, paso a paso% yi+1=yi+h*y'i+(h^2/2)*y''i% y'=x-y , x en [0,1.2], y(0)=1
clear all,close allyexacta=inline('2*exp(-x)+x-1','x');
yp=inline('x-y','x','y')ypp=inline('1-x+y','x','y')
x(1)=0;yaprox(1)=1;error(1)=0;h=0.1npasos=round(1.2/h);for i=1:npasos x(i+1)=x(i)+h; yaprox(i+1)=yaprox(i)+h*yp(x(i),yaprox(i))+h^2/2*ypp(x(i),yaprox(i));endyex=yexacta(x);error=yex-yaprox;[x',yaprox',yex',error']figure,plot(x,yaprox,'.r',x,yex,'bo'),grid on

0 0.5 10
5
10
15
20
25
30
35
40
45yaprox +, yexac o
Eje X0 0.5 1
0
20
40
60
80
100
120
140yprim aprox +, yprim exac o
Eje X
p 11HAY 3 ARCHIVOS IMPLICADOS1) Programa principal --------------------% prEj1Sis2RK2, Integra Ej sist EDO val inicial RK2 tg p medio% Método de la tangente en punto medio % yi+1= yi+ h*[f(xi+h/2,yi+(h/2)*f(xi,yi))]% y0 = ? i=0,1,2,...% ec. dif: y''+9y=36exp(3x), y(0)=2, y'(0)=6, y exacta= 2exp(3x)% despejando y'': y''=-9y+36exp(3x)% Como sistema:y1'=y2, y2'=-9y1+36exp(3x)% y1(0)=2, y2(0)=6clear all;close all% condiciones iniciales: xini=0;xfin=1;y10=2;y20=6; %(seg,m) h=0.1 % pasonpasos=round((xfin-xini)/h);yini=[y10;y20];% vector columnaxim1=xini;yim1=yini;ytotal=yini;xtotal=xini;for i=1:npasos [yim1,xim1]=RK2_TgMedia1paso(xim1,yim1,h);% ytotal: mat 2 filas, xtotal: vec fila ytotal=[ytotal,yim1];xtotal=[xtotal,xim1];endyexact=2*exp(3*xtotal); ypexact=6*exp(3*xtotal);figuresubplot(1,2,1),plot(xtotal,ytotal(1,:),'r+',... xtotal,yexact(1,:),'bo'),title('yaprox +, yexac o'),...grid on,xlabel('Eje X')subplot(1,2,2),plot(xtotal,ytotal(2,:),'r+',... xtotal,ypexact(1,:),'bo'),title('yprim aprox +, yprim exac o')grid on,xlabel('Eje X')disp('x,yaprox,yprim aprox,yexact, yprim exact')resumen=[xtotal',ytotal',yexact',ypexact']2) Función para el sistema de EDOs --------------------% funcion fEDOsis define sistema EDOs% yprima=f(x,y)% y''+9y=36exp(3x), y(0)=2, y'(0)=6, y exacta= 2exp(3x)% y exacta= 2exp(3x)function yprima=fEDOsis(x,y)yprima(1,1)=y(2);%yprima vector columnayprima(2,1)=-9*y(1)+36*exp(3*x);3) 3 Función un paso RK2 tag pto medio --------------------% funcion RK2_TgMedia1paso vector sistem EDO,1 paso% xn,xnm1:abs inic,fin paso,%yn,ynm1:ord inic,fin paso; h:tamaño paso;function [yim1,xim1] = RK2_TgMedia1paso(xi,yi,h)% Método de la tangente en punto medio% yi+1= yi+ h*[f(xi+h/2,yi+(h/2)*f(xi,yi))]yim1=yi+h*fEDOsis(xi+h/2,yi+(h/2)*fEDOsis(xi,yi));xim1=xi+h;-------------------- RESULTADO:h = 0.2000x,yaprox,yprim aprox,yexact, yprim exactresumen = 0 2.0000 6.0000 2.0000 6.0000 0.2000 3.5600 11.0390 3.6442 10.9327 0.4000 6.4389 20.3531 6.6402 19.9207 0.6000 11.7410 37.3677 12.0993 36.2979 0.8000 21.4569 68.3041 22.0464 66.1391 1.0000 39.1922 124.5209 40.1711 120.5132
p 12
»% DERIVACIÓN NUMÉRICA (formulas de tipo interpolatorio polinomial)
>> f=inline('sin(x).*cos(x)','x')f = Inline function: f(x) = sin(x).*cos(x)
>> fpexacta=inline('cos(x).^2-sin(x).^2','x')fpexacta = Inline function: fpexacta(x) = cos(x).^2-sin(x).^2
>> c=2c = 2
>> h=[0.01;0.1;0.2]h = 0.0100 0.1000 0.2000
% fórmul bilat centrada 2 puntos, Error=-f’’’(ξ)h2/6, fórmul unilateral 2 puntos, Error O(h)>> [(f(c+h)-f(c-h))./(2*h),(f(c+h)-f(c))./h,fpexacta(c)*ones(length(h),1)]ans = -0.6536 -0.6460 -0.6536 -0.6493 -0.5739 -0.6536 -0.6364 -0.4870 -0.6536
>> format long e>> h=0.01;>> [(f(c+h)-f(c-h))/(2*h),fpexacta(c)]ans = -6.536000454937324e-001 -6.536436208636119e-001
>> [(f(c)-f(c-h))/h,fpexacta(c)] % fórmula unilateral 2 ptos, Error O(h)ans = -6.611678181826897e-001 -6.536436208636119e-001
>> [(-f(c-2*h)+4*f(c-h)-3*f(c))/(-2*h),fpexacta(c)] % fórmula bilateral 3 ptos , Error=f’’’(ξ)h2/3ans = -6.537322746496543e-001 -6.536436208636119e-001
>> [(-f(c+2*h)+4*f(c+h)-3*f(c))/(2*h),fpexacta(c)] % fórmula bilateral 3 ptos , Error=f’’’(ξ)h2/3
ans = -6.537292476414436e-001 -6.536436208636119e-001
% Deriv 2a, fórmula ‘centrada’, 3 ptos, f’’(c)~(f(c-h)-2f(c)+f(c+h))/(h^2), Error =f(iv(ξ)h2/12>> aux1=sin(c+h)*cos(c+h);aux2=sin(c)*cos(c);aux3=sin(c-h)*cos(c-h);
>> fppaprox=(aux1-2*aux2+aux3)/(h^2)fppaprox = 1.513554537791451e+000
>> fppexacta=2*cos(c)*(-sin(c))-2*sin(c)*cos(c)fppexacta = 1.513604990615857e+000

p 13EDO: DIFERENCIAS FINITAS, problema de CONTORNO
y’’=f(x) , x en [a,b], y(a)=alfa, y(b)=beta .------.------.------.------.------.i-1 i i+1
h = (b-a)/n , n=nº subinterv, n+1 = núm ptos discret, x=a x=b
y’’i=(yi+1-2*yi+yi-1)/h^2, (Error: O(h^2) y’’i aprox a y’’(xi). y’’(xi)=f(xi)
Planteamos 1 ecuación por cada pto discret. Sistema de ecuaciones M yaprox=b:
1ª ecuación en x1=a : y1 = alfa
Ecuación i=2,3,…,n yi-1 - 2yi + yi+1 = f(xi)*h^2
nª ecuación en xn+1=b : yn+1 = beta
Para n=5 subintervalos: M yaprox b
1 0 0 0 0 0 y1 alfa1 -2 1 0 0 0 y2 f(x2)*h^20 1 -2 1 0 0 y3 f(x3)*h^20 0 1 -2 1 0 y4 f(x4)*h^20 0 0 1 -2 1 y5 f(x5)*h^20 0 0 0 0 1 y6 beta
Sistema de ecuaciones lineales. Matriz de coeficientes tipo ‘banda’, ‘dispersa’, ‘sparse’, con muchos ‘ceros’
Programa Matlab:
% prContorno1DifFinitas y’’=f(x) DIFERENCIAS FINITAS, BASICO
clear all,close alla=0;b=10;alfa=0;beta=0;L=b-a;n=10;h=(b-a)/n;
f=inline('x*(L-x)','x','L')
x=linspace(a,b,n+1);M=zeros(n+1,n+1);% construir matriz coef MM(1,1)=1;M(n+1,n+1)=1;b(1)=alfa;b(n+1)=beta;
for i=2:n M(i,[i-1,i,i+1])=[1,-2,1]; b(i)=f(x(i),L)*h^2;endM,b % Escribimos en Ventana Comandos matriz coef y vector indep
yaprox=M\b'; % resolucion sistema ecuaciones linealesyexacta=L*x.^3/6-x.^4/12-L^3*x/12; % calculo solucion exacta
% Escritura y dibujo de resultadosdisp('x, yaprox,yexacta'),[x',yaprox,yexacta']figure,plot(x,yaprox,'k+',x,yexacta,'or'),grid on
0 2 4 6 8 10-300
-250
-200
-150
-100
-50
0
p 14
EJECUCIÓN:
f = Inline function: f(x,L) = x*(L-x)M = 1 0 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 1 -2 1 0 0 0 0 0 0 0 0 0 0 1
b =
0 9 16 21 24 25 24 21 16 9 0
x, yaprox,yexacta
ans =
0 0 0 1.0000 -82.5000 -81.7500 2.0000 -156.0000 -154.6667 3.0000 -213.5000 -211.7500 4.0000 -250.0000 -248.0000 5.0000 -262.5000 -260.4167 6.0000 -250.0000 -248.0000 7.0000 -213.5000 -211.7500 8.0000 -156.0000 -154.6667 9.0000 -82.5000 -81.7500 10.0000 0 0
>>
Ejemplo: Ecuación de la viga de longitud L, en términos de la derivada segunda de la ley de flechas y(x), y la ley de momentos flectores M(x)
y’’(x)=M(x)/(E*I) , x en [0, L]E: módulo de elasticidad del material, I: momento de inercia de la sección transversal de la viga
Viga biapoyada de longitud L: y(0)=0, y(L)=0
Ménsula empotrada en x=0; y(0)=0, y’(0)=0
p 15% Ej Lab1 TAYLOR 1 PASO A PASO, BASICO% y'=x-y , x en [0,1.2], y(0)=1, clear allx(1)=0,yaprox(1)=1;yexacta(1)=2*exp(-x(1))+x(1)-1;error(1)=0;h=0.01npasos=round(1.2/h);for i=1:npasos x(i+1)=x(i)+h; yaprox(i+1)=yaprox(i)+h*(x(i)-yaprox(i)); yexacta(i+1)=2*exp(-x(i+1))+x(i+1)-1; error(i+1)=yexacta(i+1)-yaprox(i+1);endx,yaprox,yexacta,error
% Contorno y’’=f(x) DIFERENCIAS FINITAS, BASICO
clear all
n=10;L=5;h=L/n;f=inline('x*(L-x)','x','L')x(1)=0;for i=2:n+1, x(i)=x(i-1)+h;endxM=zeros(n+1,n+1);M(1,1)=1;M(n+1,n+1)=1;for i=2:n, M(i,[i-1,i,i+1])=[1,-2,1];endMb(1)=0;b(n+1)=0;for i=2:n, b(i)=f(x(i),L)*h^2;endb
yaprox=M\b'yexacta=L*x.^3/6-x.^4/12-L^3*x/12