unas notas sobre redes devicenet.docx
TRANSCRIPT
Unas notas sobre redes DeviceNet
Recientemente he estado trabajando en instalaciones donde he tenido que poner a punto varias redes DeviceNet. Esta entrada es una
recopilación de las acciones que he tenido que realizar, así como de las dificultades que surgieron y cómo las he solucionado.
DeviceNet es un bus de campo desarrollado por Allen-Bradley basado en el estándar CAN (Controller Area Network). Físicamente se compone de
cuatro o cinco hilos de color rojo (CAN_V+), negro (CAN_GND), azul (CAN_HIGH), blanco (CAN_LOW) y, opcionalmente, la malla de color
verde (CAN_SHLD). El cableado puede tener una longitud de 100, 250 o 500 metros, dependiendo inversamente de la velocidad de
comunicación (500, 250 o 125 kbps) y del tipo de cable que usemos. En cada red DeviceNet se pueden colocar hasta un máximo de 64 nodos
(numerados del 0 al 63). El protocolo DeviceNet da mayor prioridad a los nodos con una numeración más baja.
El modo de funcionamiento más habitual es maestro/esclavo con un único maestro por red, aunque puedan coexistir varios o establecerse comunicaciones de igual a igual (peer to peer). Entre los cables rojo y negro deberemos suministrar alimentación de 24 V. Es importante que
provenga de una fuente de alimentación de calidad y es muy recomendable que usemos una fuente independiente para alimentar el bus. Esta misma alimentación puede usarse para alimentar dispositivos
en el bus de campo (finales de carrera, detectores de proximidad, fotocéluas, etc).
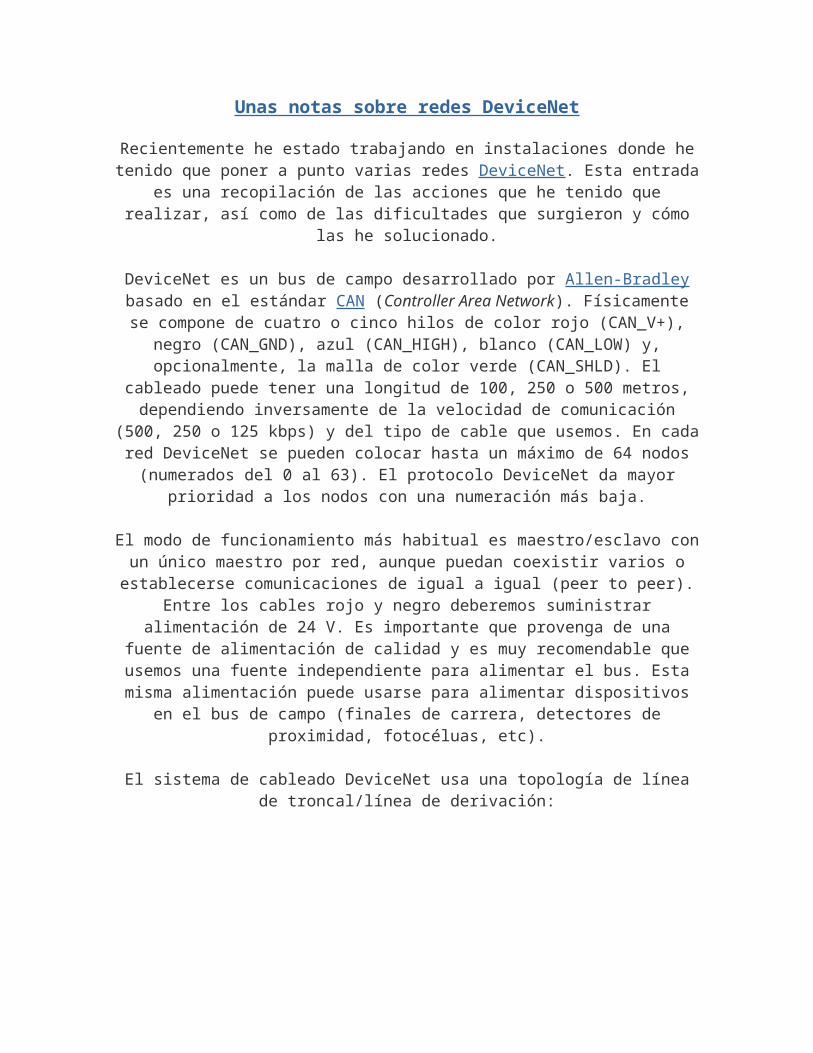
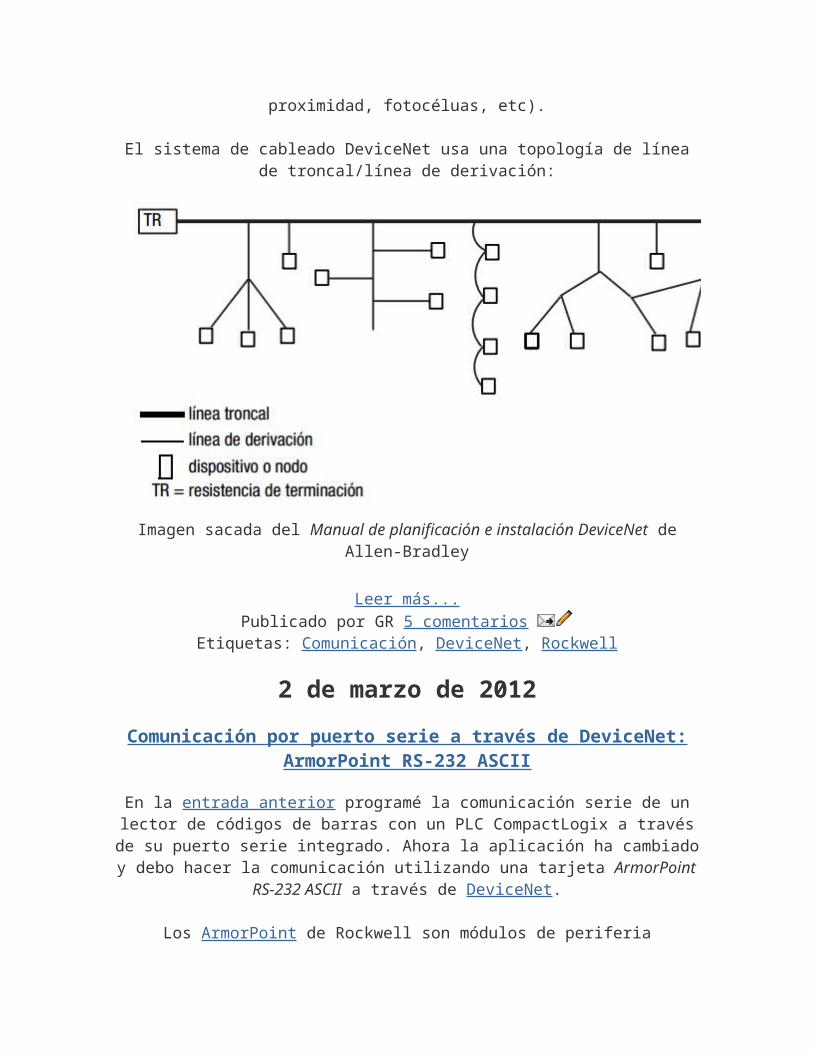
El sistema de cableado DeviceNet usa una topología de línea de troncal/línea de derivación:
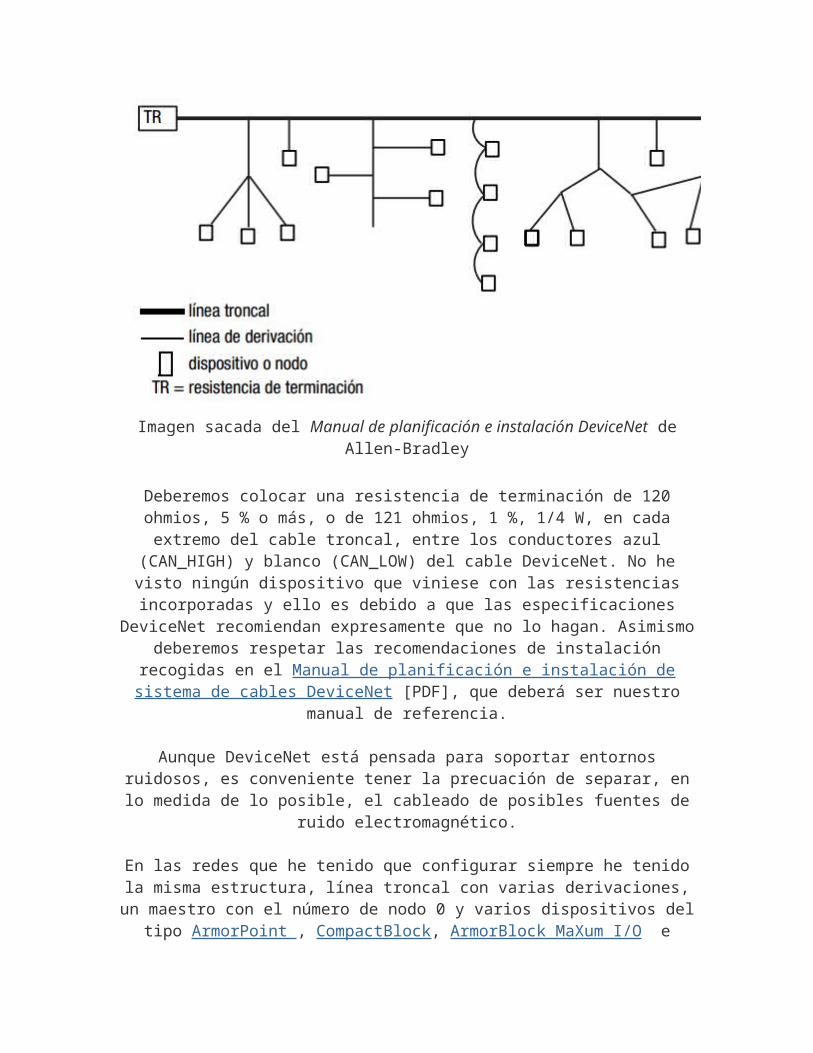
Imagen sacada del Manual de planificación e instalación DeviceNet de Allen-Bradley
Deberemos colocar una resistencia de terminación de 120 ohmios, 5 % o más, o de 121 ohmios, 1 %, 1/4 W, en cada extremo del cable troncal, entre los conductores azul (CAN_HIGH) y blanco (CAN_LOW) del cable
DeviceNet. No he visto ningún dispositivo que viniese con las resistencias incorporadas y ello es debido a que las especificaciones DeviceNet recomiendan expresamente que no lo hagan. Asimismo
deberemos respetar las recomendaciones de instalación recogidas en el Manual de planificación e instalación de sistema de cables
DeviceNet [PDF], que deberá ser nuestro manual de referencia.
Aunque DeviceNet está pensada para soportar entornos ruidosos, es conveniente tener la precuación de separar, en lo medida de lo posible,
el cableado de posibles fuentes de ruido electromagnético.
En las redes que he tenido que configurar siempre he tenido la misma estructura, línea troncal con varias derivaciones, un maestro con el
número de nodo 0 y varios dispositivos del tipo ArmorPoint , CompactBlock, ArmorBlock MaXum I/O e incluso variadores de
frecuencia PowerFlex 40 de Rockwell o MoviDrive de Sew.
Como maestros he usado tarjetas escáner DeviceNet 1756-DNB cuando el PLC era un ControlLogix y 1769-SDN cuando el PLC era de la gama CompactLogix. Los escáner DeviceNet se "apropian" de los esclavos y
estos solo pueden "obedecer" a un maestro.

Los escáner DeviceNet ofrecen la posibilidad de actualizar el firmware. En mi caso, el cliente para el que trabajamos tiene homologadas
versiones de firmware específicas. El proceso de actualización es muy similar al de actualizar el firmware de un PLC, utilizándose la misma
herramienta ControlFLASH.
También es importante tener registrados los ficheros EDS adecuados para cada elemento de la red, incluidos los escáner. Me sucedió que un
escáner 1769-SDN no daba señales de vida incluso actualizándole el firmware, problema que quedó resuelto al actualizar el EDS. Los EDS
(electronic data sheet) son un tipo de ficheros que nos proporcionan los fabricates de dispositivos DeviceNet especificando su configuración de
red. Es necesario registrarlos en el sistema para que puedan ser identificados en la red y para ello tenemos la herramienta EDS Wizard
A cada nodo de la red le deberemos asignar un número y la velocidad de comunicación. Esta última deber ser única y coincidente para todos los
nodos de la red. Le presencia de un nodo con una velocidad mal configurada provocará que no exista comunicación en absoluto.
También tendremos problemas si le damos la misma dirección a dos o más dispositivos. Para realizar esta asignación deberemos consultar la documentación de cada dispositivo. Lo habitual es que existan en el
propio dispositivo microinterruptores o ruedas numeradas con las que especificar la dirección y velocidad. También es posible encontrarnos
dispositivos que acepten únicamente la configuración a través de software u ambas al mismo tiempo. En este último caso colocaremos la selección del número de nodo en 63 o superior y luego, vía el software
de configuración de redes RSNetWorx u otro software específico, asignarle la dirección.
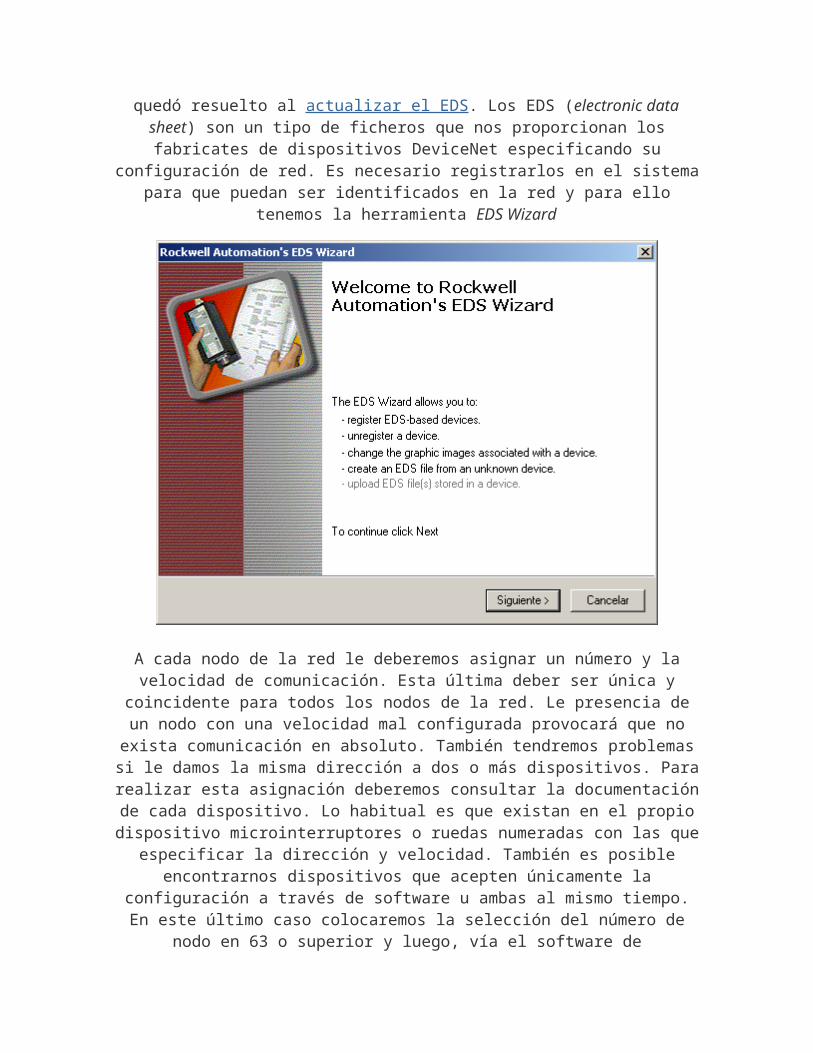
Los escáner DeviceNet 1769-SDN usados en los PLC CompactLogix solo admiten la posibilidad de configuración software. Para ello disponemos
de la aplicación Node Comissioning accesible desde el menú de RSNetWorx Tools -> Node Comissioning...
Ahora debemos asegurarnos que estamos en línea con el PLC y pulsar sobre Browse...
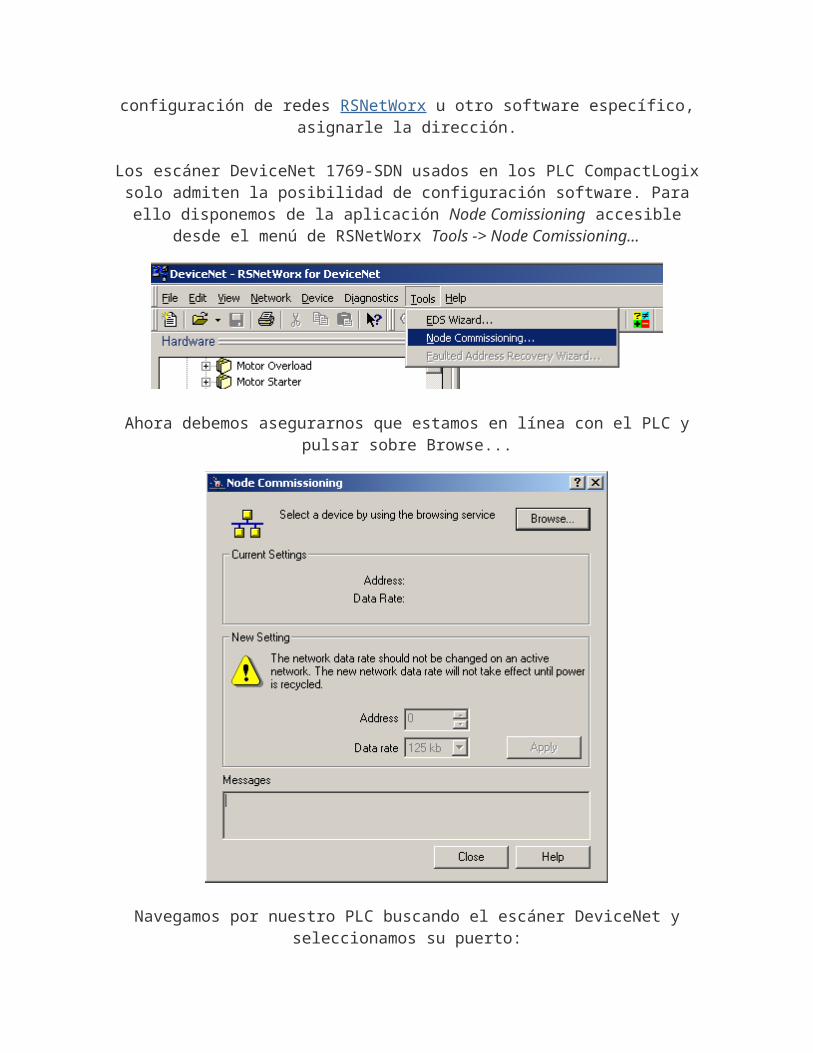
Navegamos por nuestro PLC buscando el escáner DeviceNet y seleccionamos su puerto:
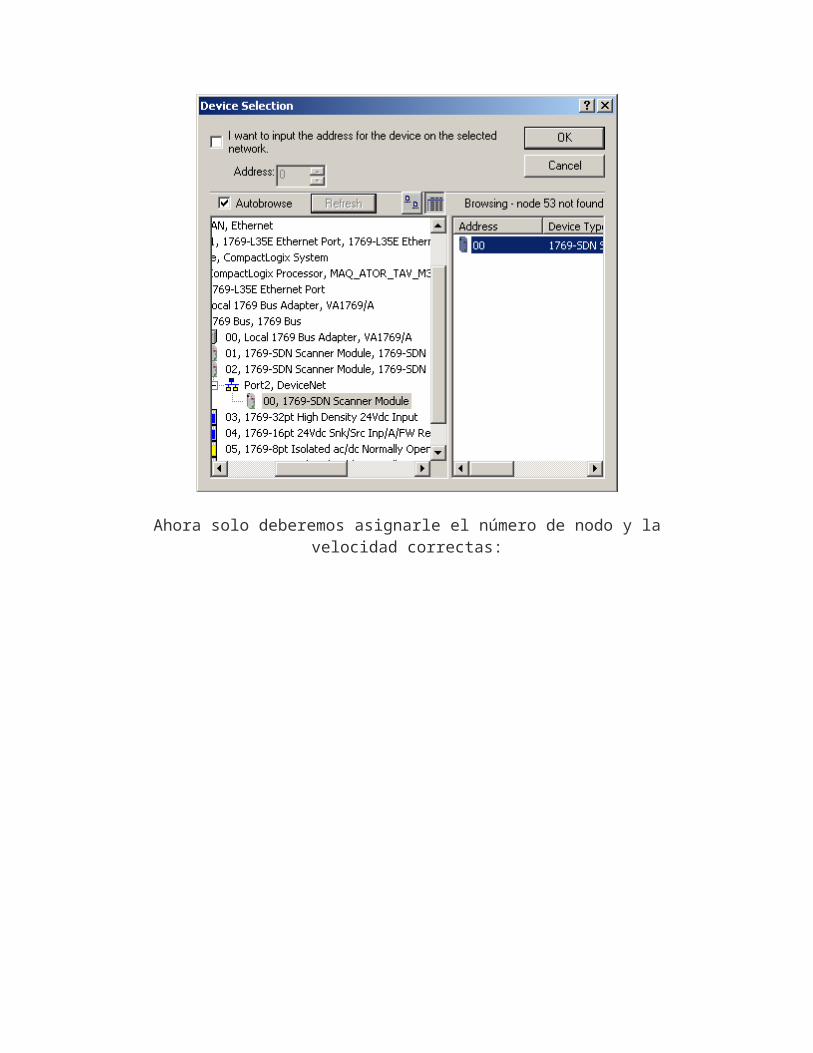
Ahora solo deberemos asignarle el número de nodo y la velocidad correctas:
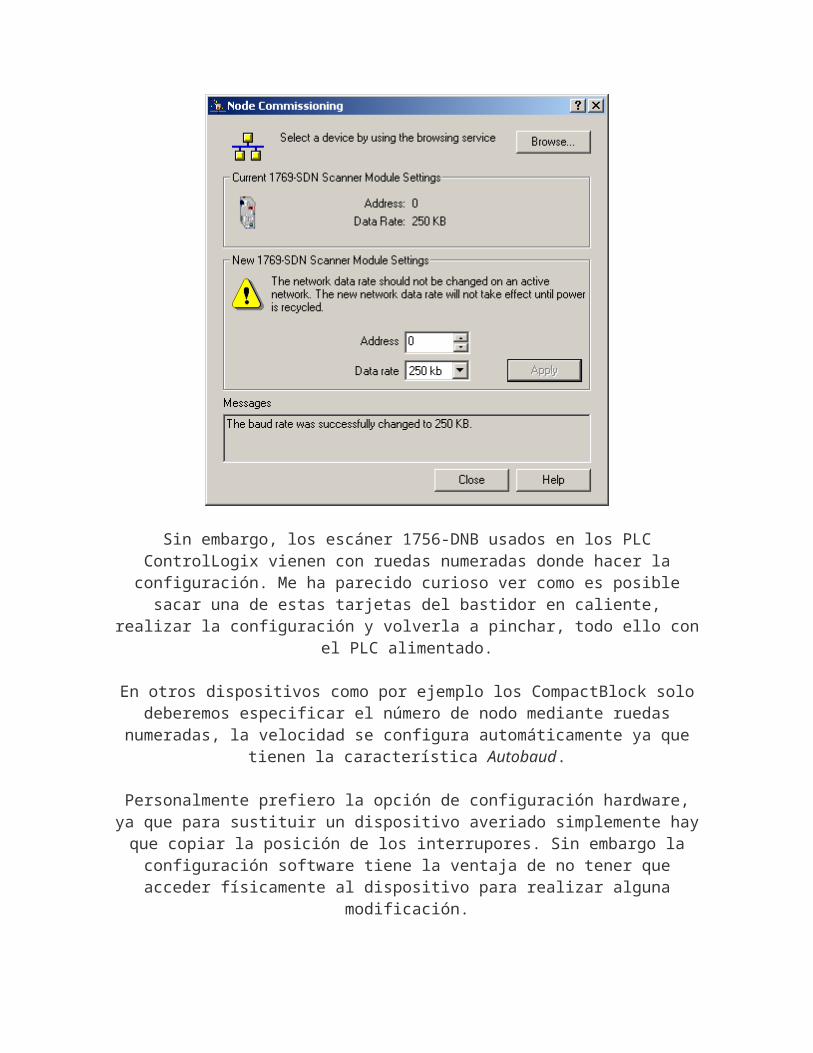
Sin embargo, los escáner 1756-DNB usados en los PLC ControlLogix vienen con ruedas numeradas donde hacer la configuración. Me ha parecido curioso ver como es posible sacar una de estas tarjetas del
bastidor en caliente, realizar la configuración y volverla a pinchar, todo ello con el PLC alimentado.
En otros dispositivos como por ejemplo los CompactBlock solo deberemos especificar el número de nodo mediante ruedas numeradas,
la velocidad se configura automáticamente ya que tienen la característica Autobaud.
Personalmente prefiero la opción de configuración hardware, ya que para sustituir un dispositivo averiado simplemente hay que copiar la
posición de los interrupores. Sin embargo la configuración software tiene la ventaja de no tener que acceder físicamente al dispositivo para
realizar alguna modificación.
Cuando tengamos todos nuestros nodos preparados y conectados es momento de alimentar la red DeviceNet. Los escáner vienen con
displays que nos darán información de sus estado. Los 1769-SDN tienen dos dígitos que nos indicarán un código numérico para que veamos en la documentación su significado. Los 1756-DNB tienen un display que nos
dirá su estado, por ejemplo Bus off detected o No power.

Cada dispositivo tiene a su vez leds que nos pueden ayudar a su diagnosis:
Led verde parpadeante: UNALLOCATED - El dispositivo está correctamente unido a la red, pero ningún maestro (escáner) se ha
hecho cargo de él - o TIMED OUT - se han perdido mensajes de comunicación maestro/esclavo.
Led rojo fijo: FAULTED - Se ha producido un error interno en el dispositivo o hay nodos duplicados en la red - o BUSOFF - el
dispositivo se ha desconectado de la red debido a errores graves.
Durante la puesta en marcha de mis instalaciones se dieron varios fallos. Lo primero que me encontré fue alguna alimentación de 24 V al revés, afortunadamente sin consecuencias graves. También me encontré con
que la alimentación de las cabeceras ArmorPoint estaban en cortocircuito. El problema fue que la numeración del conector, comprado
también a Rockwell, no coincidía con la numeración en la propia cabecera -no hay que fiarse de las numeraciones de los conectores-.
Solventados estos problemas me encontré con que mi red estaba permanentemente en estado BUSOFF. Para ver qué estaba pasando
comprobé primero que en los puntos más alejados de la red, entre los cables rojo y negro no había una caída de tensión menor al 5% (22,8 V).
Quitando la alimentación, comprobé el valor de resistencia entre los cables azul y blanco, que debe ser de unos 60 Ω (el paralelo de las
resistencias de terminación). Luego desconecté todos los nodos -para recuperar la red en estado de BUSOFF es necesario quitar alimentación-.
Volví a alimentar y vi que ya no estaba en BUSOFF. Luego fui conectando los nodos uno a uno, hasta que apreció el problemático:
resultó ser un Maxum mal conectado. Los Maxum tienen dos conectores, uno para la red DeviceNet y otro para alimentar las salidas digitales,
ambos de métrica 12 y estaban intercambiados entre sí.
Rockwell tiene disponible un manual en español muy útil para realizar la diagnosis de una red DeviceNet titulado Guía de Diagnóstico y solución de Problemas para DeviceNet (formato .DOC). Si tienes que trabajar con
redes DeviceNet resulta un documento imprescidible.
Llegados a este punto ya tengo mi red lista para atacarla a nivel software. Aquí deberemos empezar por inspeccionarla con el RSLinx. Si en el RSLinx no aparece ningún nodo es que tenemos un problema de
cableado.
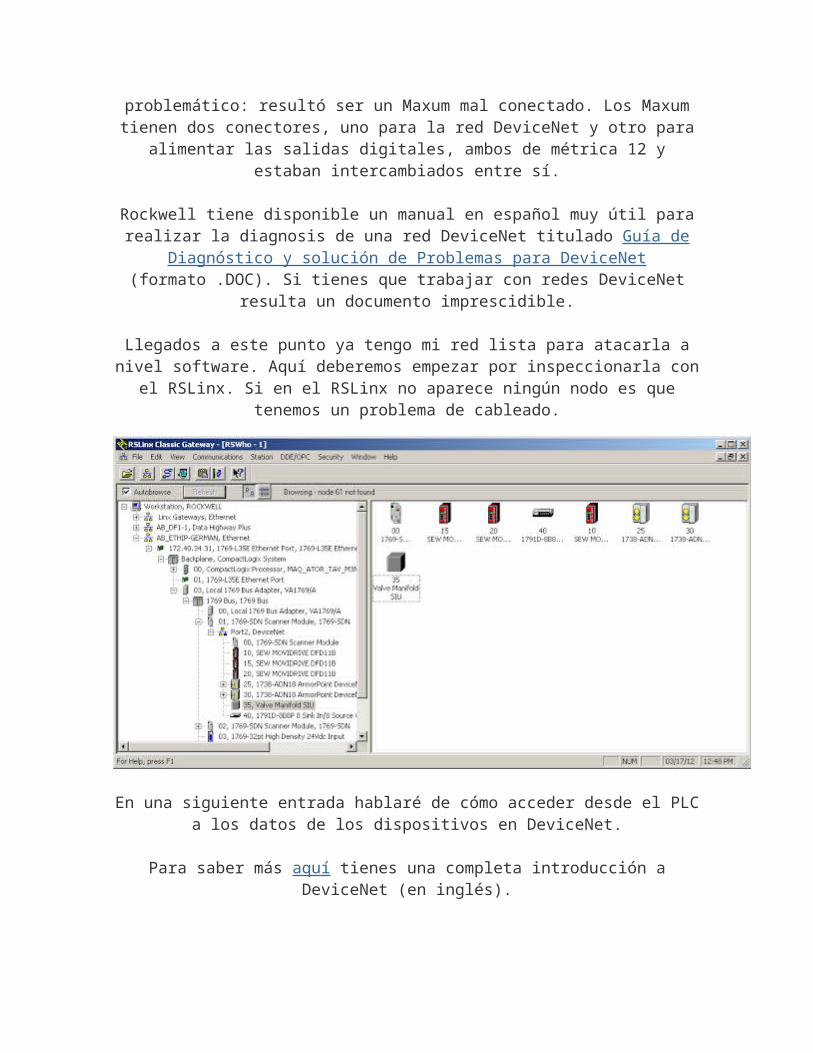
En una siguiente entrada hablaré de cómo acceder desde el PLC a los datos de los dispositivos en DeviceNet.
Para saber más aquí tienes una completa introducción a DeviceNet (en inglés).
Si te has peleado con redes DeviceNet te agradecería que lo comentases, para ayudar a los que estamos empezando.
Comandando variadores Sew Movidrive MDX61B a través de DeviceNet
Recientemente he tenido que poner en marcha unos variadores Sew Movidrive MDX61B para comandar unos motores acoplados a husillos, para realizar movimientos de traslación y elevación en una máquina.
Para este uso la configuración que hay que hacer es muy sencilla, lejos de las posibilidades que se le pueden exprimir a estos variadores:
control vectorial o modo servo. Como van a estar integrados en una red DeviceNet, les he instalado la correspondiente tarjeta de
comunicaciones DFD11B. En estas notas voy a resumir los pasos que he dado para comandarlo desde un PLC CompactLogix.

Variadores Sew Movidrive MDX61B (perdón por la calidad de las fotos)
La instalación de los variadores está bien explicada en el completo manual de instrucciones de funcionamiento (en español). Si seguimos sus recomendaciones no tendremos la más mínima complicación, así
que me voy a centrar en la manera en la que los he configurado.
La tarjeta de comunicaciones DFD11B tiene una serie de interruptores DIP para configurarla. Con ellos le asignaremos una dirección de nodo en
la red DeviceNet (interruptores NA), la velocidad de comunicación (interruptores DR) y la longitud de los datos que se transmitirán
(interruptores PD). En mi caso tengo tres variadoes que les he asigando las direcciones 10, 15 y 20. La velocidad de comunicación la he fijado en
250 kbps y he asignado un 3 a los datos de proceso.
Leer más... Publicado por GR 5 comentarios
Etiquetas: DeviceNet, Rockwell, Sew, variador

6 de abril de 2012
Mapeando una red DeviceNet en un controlador Logix5000
Cuando insertamos un escáner DeviceNet en un proyecto de RSLogix 5000, en las variables de ámbito del controlador (Controller tags)
aparecen tres tags que nos servirán para establecer el diálogo con todos los elementos de la red. Local:1:I se refiere a los datos que leemos de
la red, Local:1:O a los datos que vamos a escribir y Local:1:S a variables que nos van a permitir diagnosticar el estado de nuestra red
(el 1 después de Local quiere decir que nuestro escáner está en el slot 1 del bastidor).
Tags para un escáner DeviceNet 1756-DNB
Los distintos dispositivos que hayamos configurado en nuestra red se mapearán en Local:1:I.Data para los datos de entrada (lo que leemos
de los dispositivos) y en Local:1:O.Data para los datos de salida (lo que vamos a escribir). Estas variables son tablas de tipo DINT de tamaño
máximo prefijado para cada tipo de escáner. Por ejemplo, para un escáner 1769-SDN de la gama CompactLogix tenemos 90 DINT (360 bytes) para entrada y 90 DINT para la salida, y para el escáner 1756-
DNB de la gama ControlLogix esta capacidad se amplía a 124 DINT (496 bytes) para la entrada y 123 DINT (492 bytes) para la salida.
Leer más... Publicado por GR 3 comentarios
Etiquetas: Comunicación, DeviceNet, Rockwell
29 de marzo de 2012
Unas notas sobre redes DeviceNet

Recientemente he estado trabajando en instalaciones donde he tenido que poner a punto varias redes DeviceNet. Esta entrada es una
recopilación de las acciones que he tenido que realizar, así como de las dificultades que surgieron y cómo las he solucionado.
DeviceNet es un bus de campo desarrollado por Allen-Bradley basado en el estándar CAN (Controller Area Network). Físicamente se compone de
cuatro o cinco hilos de color rojo (CAN_V+), negro (CAN_GND), azul (CAN_HIGH), blanco (CAN_LOW) y, opcionalmente, la malla de color
verde (CAN_SHLD). El cableado puede tener una longitud de 100, 250 o 500 metros, dependiendo inversamente de la velocidad de
comunicación (500, 250 o 125 kbps) y del tipo de cable que usemos. En cada red DeviceNet se pueden colocar hasta un máximo de 64 nodos
(numerados del 0 al 63). El protocolo DeviceNet da mayor prioridad a los nodos con una numeración más baja.
El modo de funcionamiento más habitual es maestro/esclavo con un único maestro por red, aunque puedan coexistir varios o establecerse comunicaciones de igual a igual (peer to peer). Entre los cables rojo y negro deberemos suministrar alimentación de 24 V. Es importante que
provenga de una fuente de alimentación de calidad y es muy recomendable que usemos una fuente independiente para alimentar el bus. Esta misma alimentación puede usarse para alimentar dispositivos
en el bus de campo (finales de carrera, detectores de proximidad, fotocéluas, etc).
El sistema de cableado DeviceNet usa una topología de línea de troncal/línea de derivación:
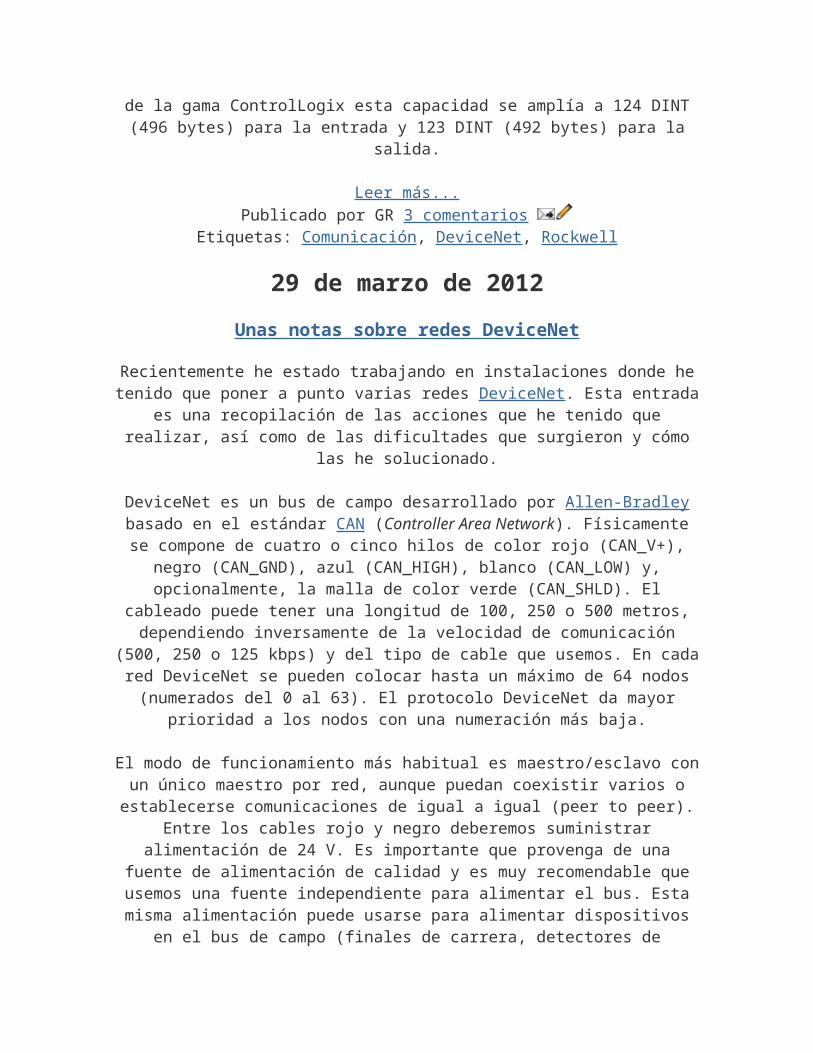
Imagen sacada del Manual de planificación e instalación DeviceNet de Allen-Bradley
Leer más... Publicado por GR 5 comentarios
Etiquetas: Comunicación, DeviceNet, Rockwell
2 de marzo de 2012
Comunicación por puerto serie a través de DeviceNet: ArmorPoint RS-232 ASCII
En la entrada anterior programé la comunicación serie de un lector de códigos de barras con un PLC CompactLogix a través de su puerto serie
integrado. Ahora la aplicación ha cambiado y debo hacer la comunicación utilizando una tarjeta ArmorPoint RS-232 ASCII a través
de DeviceNet.
Los ArmorPoint de Rockwell son módulos de periferia distribuida disponibles para buses de campo DeviceNet, ControlNet, EtherNet/IP o
Profibus DP. A la cabecera DeviceNet que tengo disponible, referencia 1738-ADN18, le voy a acoplar una tarjeta de comunicaciones 1738-232ASCM12, que es una versión más robusta de una tarjeta 1734-232ASC, compartiendo la misma electrónica, por ello la documentación
de referencia será la de esta última tarjeta: POINT I/O ASCII Modules 1734-232ASC, 1734-485ASC (PDF) . El conjunto
ensamblado de la cabecera ArmorPoint con mi tarjeta de comunicación serie tiene el siguiente aspecto:
Cabecera ArmorPoint con inteface serie sobre mi mesa, lista para hacer pruebas(disculpad la calidad de las conexiones, a pesar del mal aspecto el conjunto funcionó sin
problemas).
Comunicación por puerto serie a través de DeviceNet: ArmorPoint RS-232 ASCII
En la entrada anterior programé la comunicación serie de un lector de códigos de barras con un PLC CompactLogix a través de su puerto serie
integrado. Ahora la aplicación ha cambiado y debo hacer la comunicación utilizando una tarjeta ArmorPoint RS-232 ASCII a través
de DeviceNet.
Los ArmorPoint de Rockwell son módulos de periferia distribuida disponibles para buses de campo DeviceNet, ControlNet, EtherNet/IP o
Profibus DP. A la cabecera DeviceNet que tengo disponible, referencia 1738-ADN18, le voy a acoplar una tarjeta de comunicaciones 1738-232ASCM12, que es una versión más robusta de una tarjeta 1734-232ASC, compartiendo la misma electrónica, por ello la documentación
de referencia será la de esta última tarjeta: POINT I/O ASCII Modules 1734-232ASC, 1734-485ASC (PDF) . El conjunto

ensamblado de la cabecera ArmorPoint con mi tarjeta de comunicación serie tiene el siguiente aspecto:
Cabecera ArmorPoint con inteface serie sobre mi mesa, lista para hacer pruebas(disculpad la calidad de las conexiones, a pesar del mal aspecto el conjunto funcionó sin
problemas).
En conjunto, para hacer mis pruebas, tengo conectado un PLC CompactLogix L35E con una tarjeta escáner de DeviceNet. Entre esta
última y la cabecera ArmorPoint coloco un PowerTap referencia 1485T-P2T5-T5, que me servirá para alimentar la red. Conecto el cable
DeviceNet y en los extremos, entre los cables blanco y azul pondré sendas resistencias de cierre. Para conectar el lector de códigos de
barras a la tarjeta de comunicaciones he fabricado chapuceramente un adaptador como el siguiente:

El conjunto completo y alimentado sobre mi mesa presenta el siguiente aspecto:
PLC + PowerTap + ArmorPoint + Lector de códigos de barras
Ahora toca configurar la tarjeta de comunicaciones, para ello abrimos el software de redes RSNetWorx for DeviceNet y buscamos la tarjeta 1738-

232ASCM12:
Los parámetros de comunicación serie deben ser coherentes con los indicados el la configuración hecha en el lector de códigos de barras.
También deberemos ampliar los buffers de comunicación y especificar el caracter terminador. No olvidemos mapear en el escáner las áreas de
entradas y salidas necesarias.
Configuro mi PLC en un proyecto de RSLogix5000, con la red DeviceNet del escáner y la subred del ArmorPoint. Con la herramienta DeviceNet Tag Generator Tool genero en mi proyecto los tags necesarios para no
tener que direccionarlos a mano.
A la hora de realizar la programación, lo primero a tener en cuenta es que las instrucciones para manejo del puerto serie integrado en el PLC
no son aplicables a un puerto serie en DeviceNet. Además tenemos una limitación adicional: el tamaño de buffer máximo es de 128 bytes. Si vamos a hacer comunicaciones de menor tamaño no habría ningún
problema, pero en mi caso necesito recibir tramas de unos 200 bytes. La solución para mi aplicación consiste en programa el lector de códigos de
barras para que cada 80 bytes (por ejemplo) inserte un carácter de terminación. Así que para leer una trama de 200 bytes voy a tener que

hacer tres lecturas sucesivas y reunirlas en mi PLC.
Para manejar las tramas de comunicación voy a definir un tipo de string de 256 caracteres:
Los tags que voy a necesitar los voy a agrupar en un UDT:
Para saber que tenemos datos disponibles en el buffer de comunicación serie tenemos el tag
DNET_N01_S01_COS_I.ReceiveRecordNumber (creado automáticamente por el DeviceNet Tag Generator), que se irá incrementando con cada
recepción. Como cada trama viene troceada en varias recepciones, para saber que he leído todos los datos, el lector de código de barras lo he configurado para que me dé en los primeros cuatro bytes la longitud total de la trama. Así que tendré que ir sumando la longitud de cada
recepción hasta que coincida con lo que me diga el lector. Si tuviese una

longitud de trama fija la programación sería más sencilla.
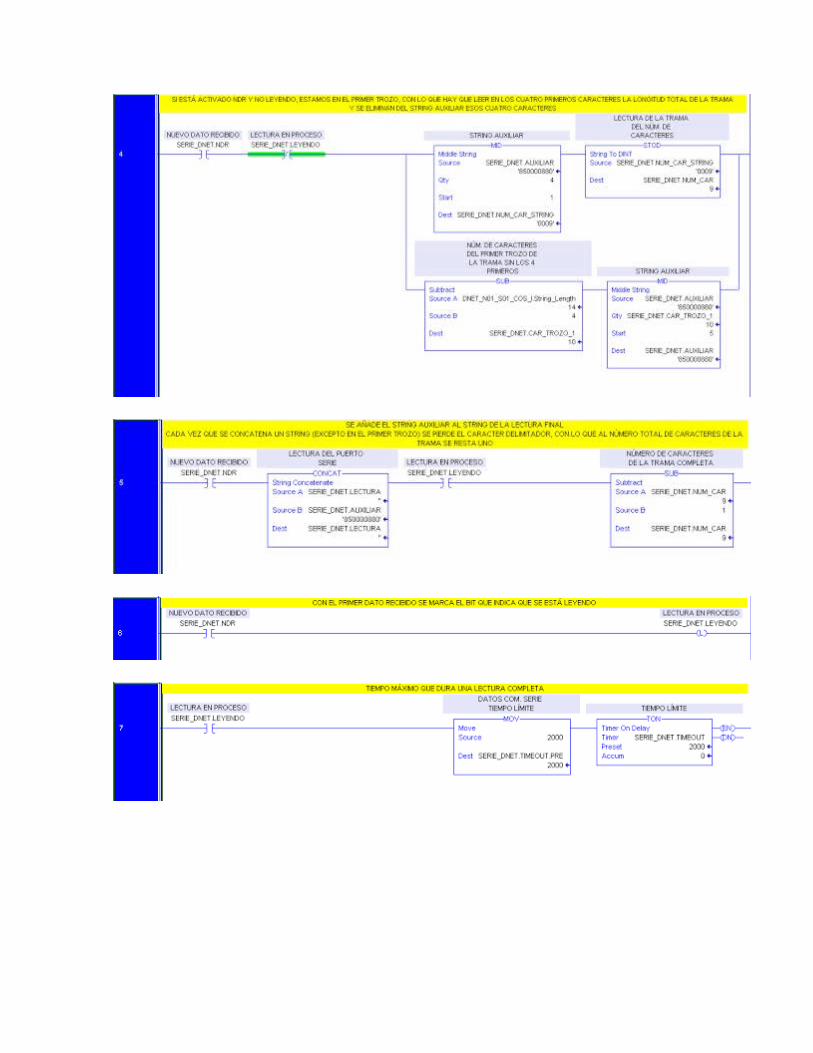
Mi rutina de recepción de datos es la siguiente:

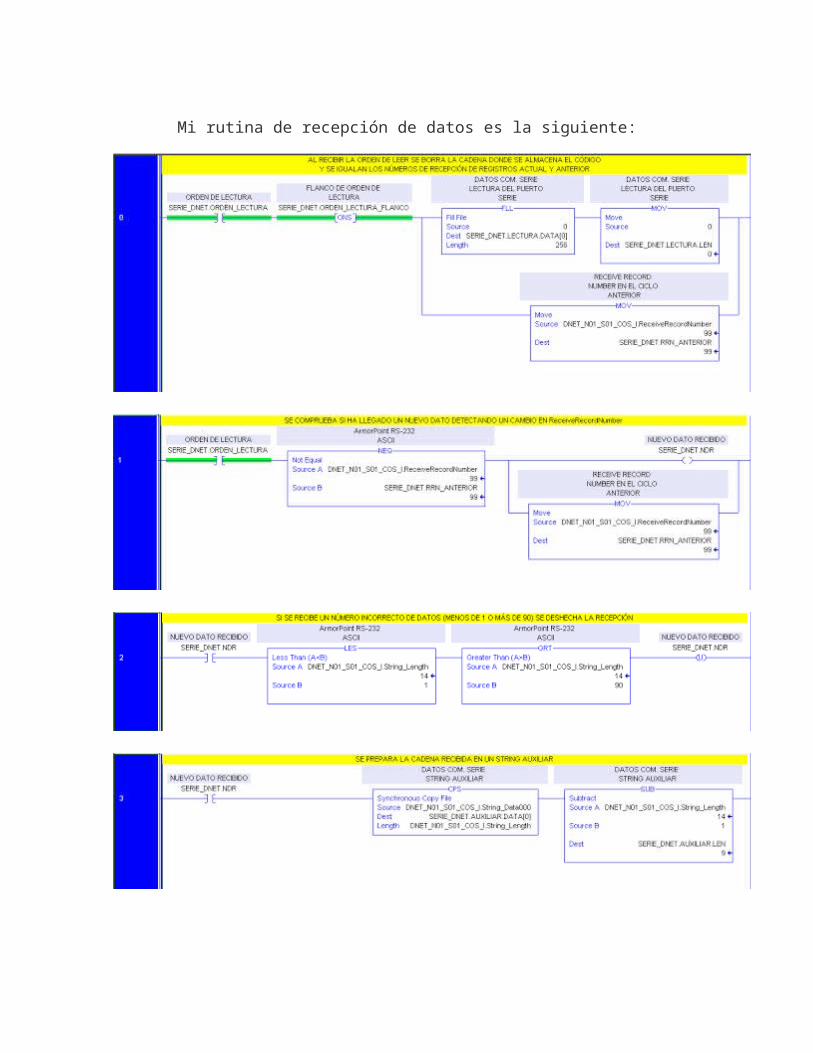
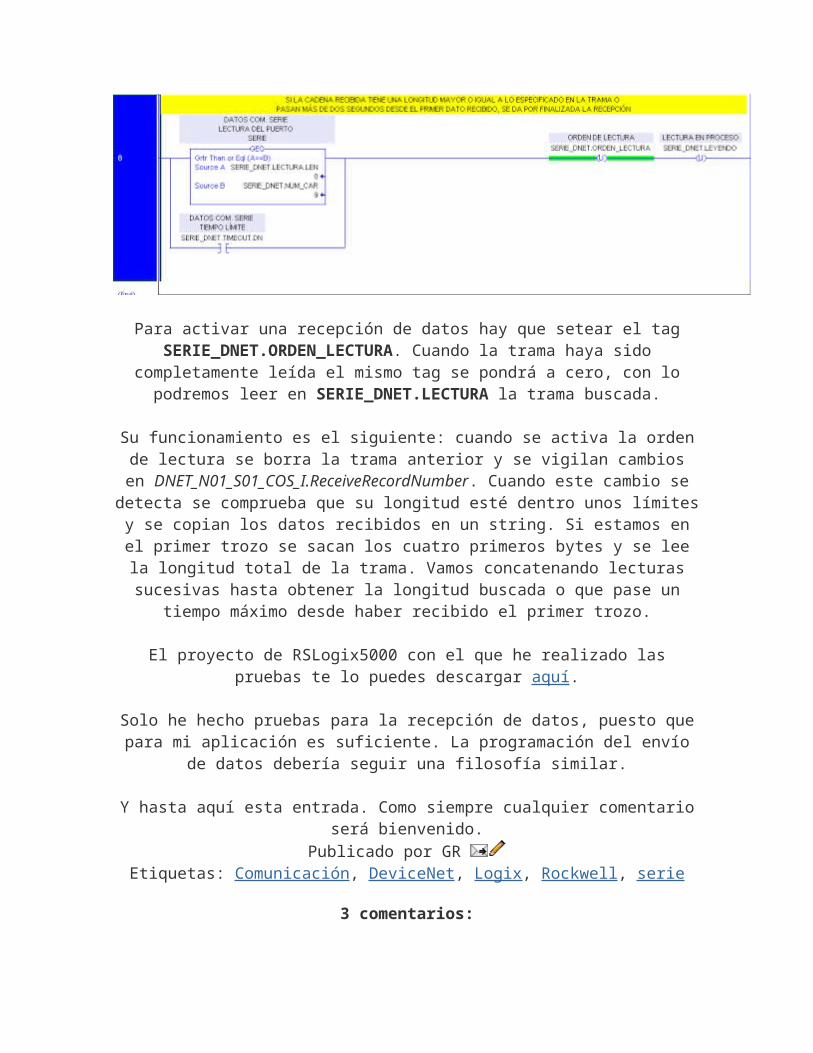
Para activar una recepción de datos hay que setear el tag SERIE_DNET.ORDEN_LECTURA. Cuando la trama haya sido
completamente leída el mismo tag se pondrá a cero, con lo podremos leer en SERIE_DNET.LECTURA la trama buscada.
Su funcionamiento es el siguiente: cuando se activa la orden de lectura se borra la trama anterior y se vigilan cambios
en DNET_N01_S01_COS_I.ReceiveRecordNumber. Cuando este cambio se detecta se comprueba que su longitud esté dentro unos límites y se copian los datos recibidos en un string. Si estamos en el primer trozo se
sacan los cuatro primeros bytes y se lee la longitud total de la trama. Vamos concatenando lecturas sucesivas hasta obtener la longitud
buscada o que pase un tiempo máximo desde haber recibido el primer trozo.
El proyecto de RSLogix5000 con el que he realizado las pruebas te lo puedes descargar aquí.
Solo he hecho pruebas para la recepción de datos, puesto que para mi aplicación es suficiente. La programación del envío de datos debería
seguir una filosofía similar.
Y hasta aquí esta entrada. Como siempre cualquier comentario será bienvenido.
Publicado por GR Etiquetas: Comunicación, DeviceNet, Logix, Rockwell, serie
3 comentarios:
1.
Omarmsa 8 de marzo de 2012, 20:35
Son excelentes publicaciones...y toda la información que puedan compartir se los agradeceré. Saludos y nuevamente felicitaciones
Responder
2.
Anónimo15 de marzo de 2012, 21:26
Mapeando una red DeviceNet en un controlador Logix5000
Cuando insertamos un escáner DeviceNet en un proyecto de RSLogix 5000, en las variables de ámbito del controlador (Controller tags)
aparecen tres tags que nos servirán para establecer el diálogo con todos los elementos de la red. Local:1:I se refiere a los datos que leemos de
la red, Local:1:O a los datos que vamos a escribir y Local:1:S a variables que nos van a permitir diagnosticar el estado de nuestra red
(el 1 después de Local quiere decir que nuestro escáner está en el slot 1 del bastidor).
Tags para un escáner DeviceNet 1756-DNB
Los distintos dispositivos que hayamos configurado en nuestra red se mapearán en Local:1:I.Data para los datos de entrada (lo que leemos
de los dispositivos) y en Local:1:O.Data para los datos de salida (lo que vamos a escribir). Estas variables son tablas de tipo DINT de tamaño
máximo prefijado para cada tipo de escáner. Por ejemplo, para un escáner 1769-SDN de la gama CompactLogix tenemos 90 DINT (360 bytes) para entrada y 90 DINT para la salida, y para el escáner 1756-
DNB de la gama ControlLogix esta capacidad se amplía a 124 DINT (496 bytes) para la entrada y 123 DINT (492 bytes) para la salida.
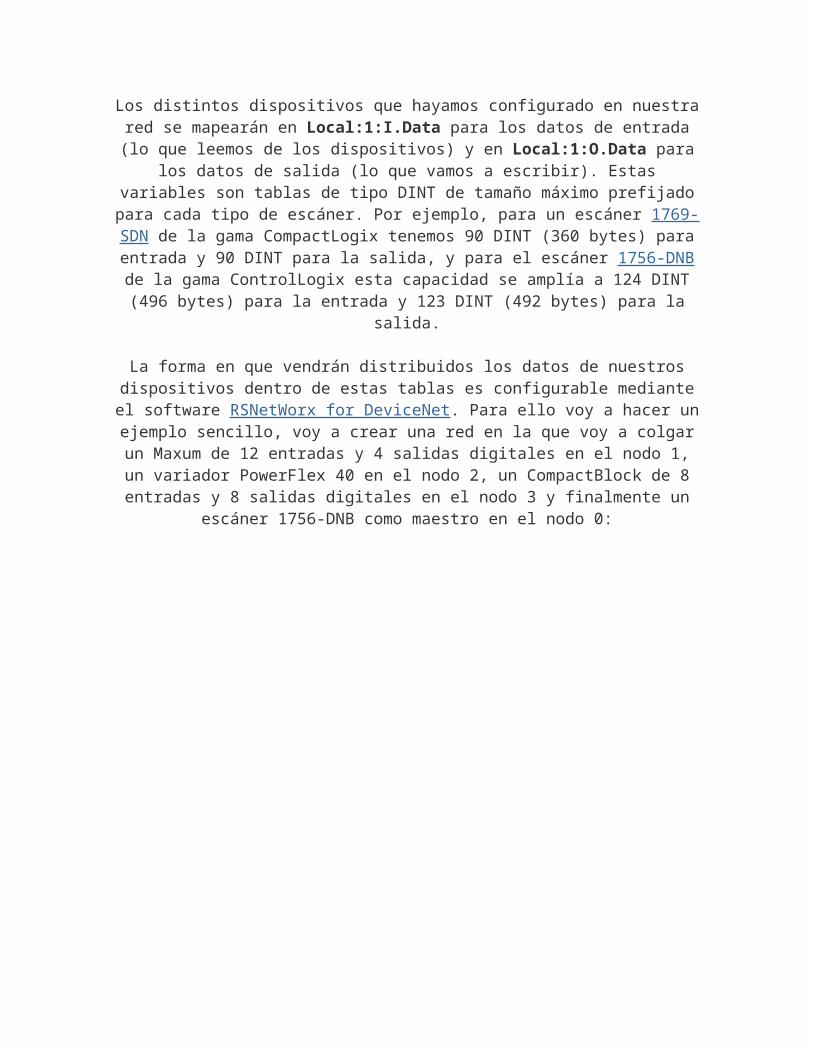
La forma en que vendrán distribuidos los datos de nuestros dispositivos dentro de estas tablas es configurable mediante el software RSNetWorx for DeviceNet. Para ello voy a hacer un ejemplo sencillo, voy a crear una red en la que voy a colgar un Maxum de 12 entradas y 4 salidas digitales en el nodo 1, un variador PowerFlex 40 en el nodo 2, un CompactBlock de 8 entradas y 8 salidas digitales en el nodo 3 y finalmente un escáner
1756-DNB como maestro en el nodo 0:
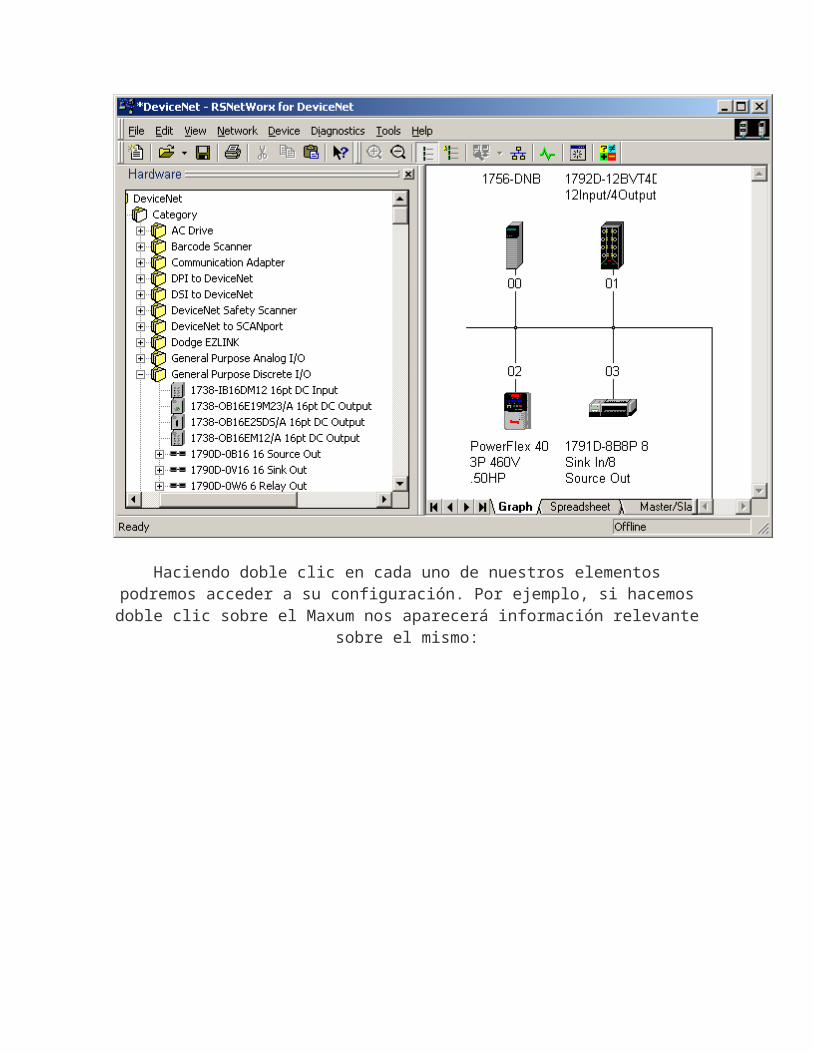
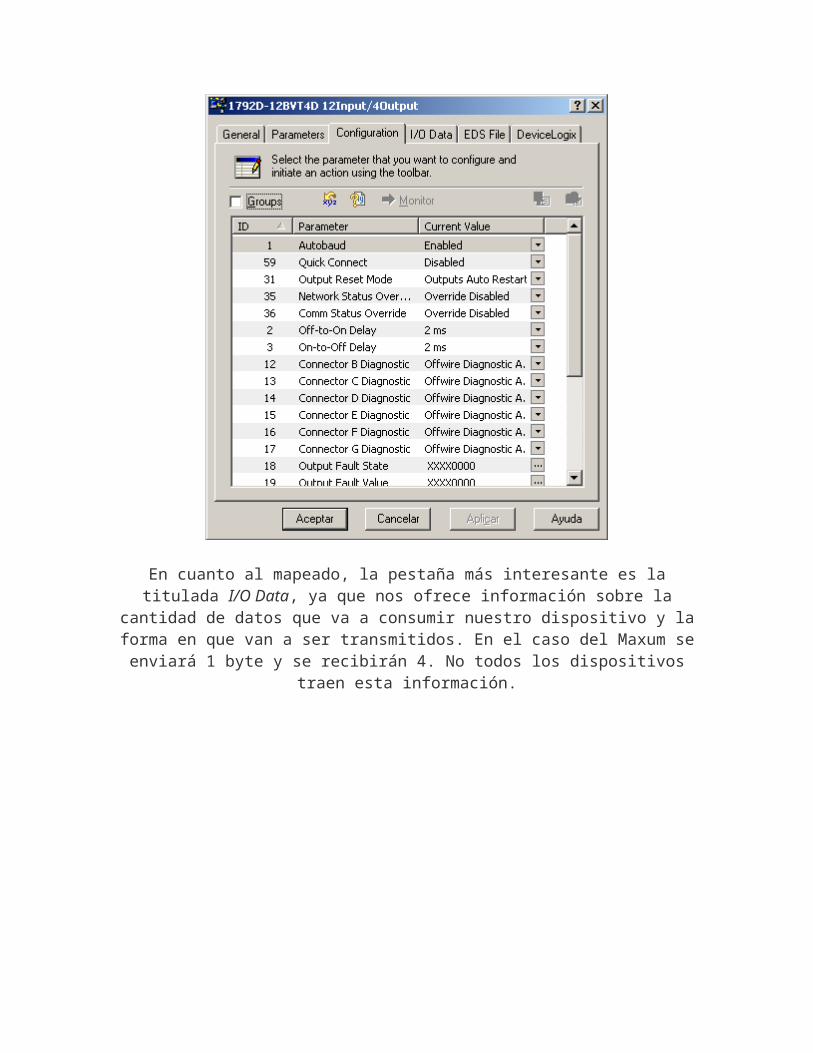
Haciendo doble clic en cada uno de nuestros elementos podremos acceder a su configuración. Por ejemplo, si hacemos doble clic sobre el
Maxum nos aparecerá información relevante sobre el mismo:

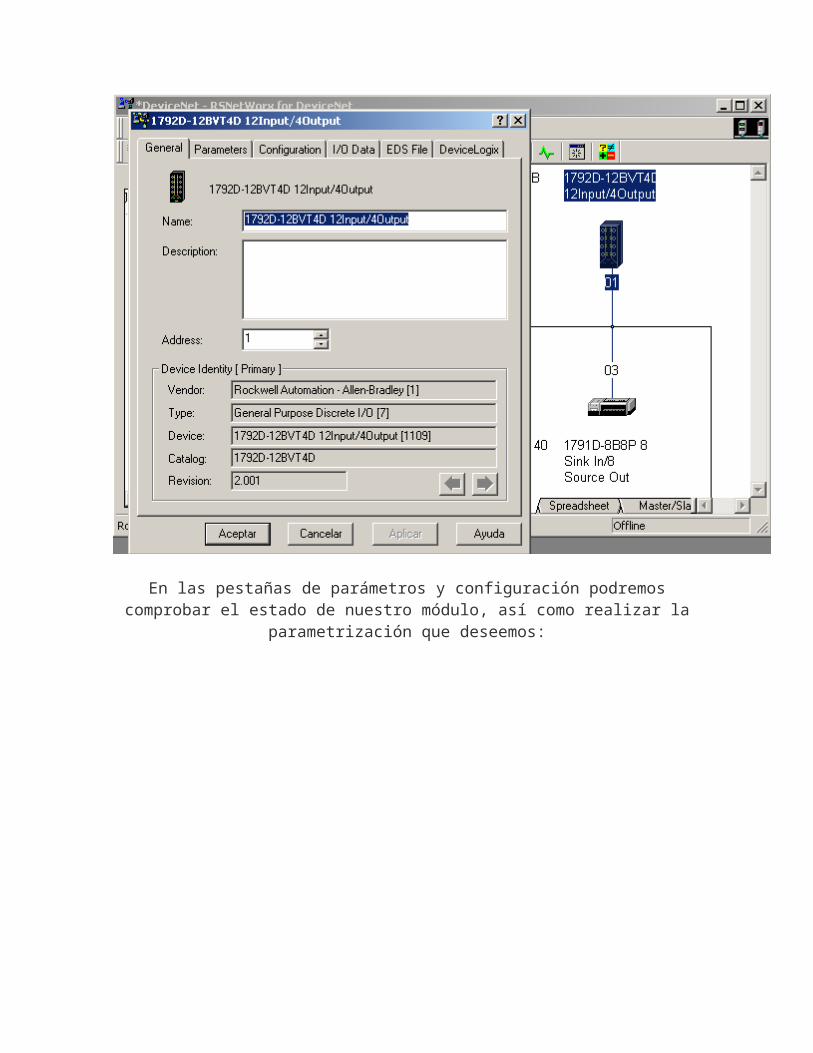
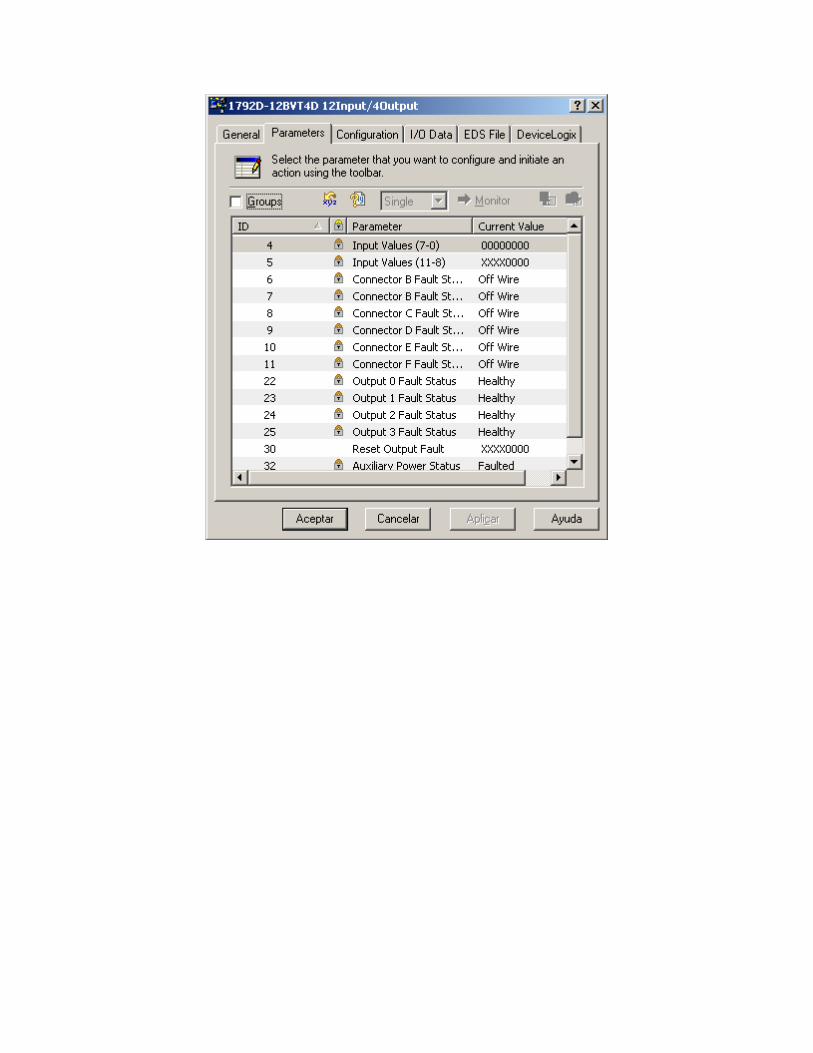
En las pestañas de parámetros y configuración podremos comprobar el estado de nuestro módulo, así como realizar la parametrización que
deseemos:
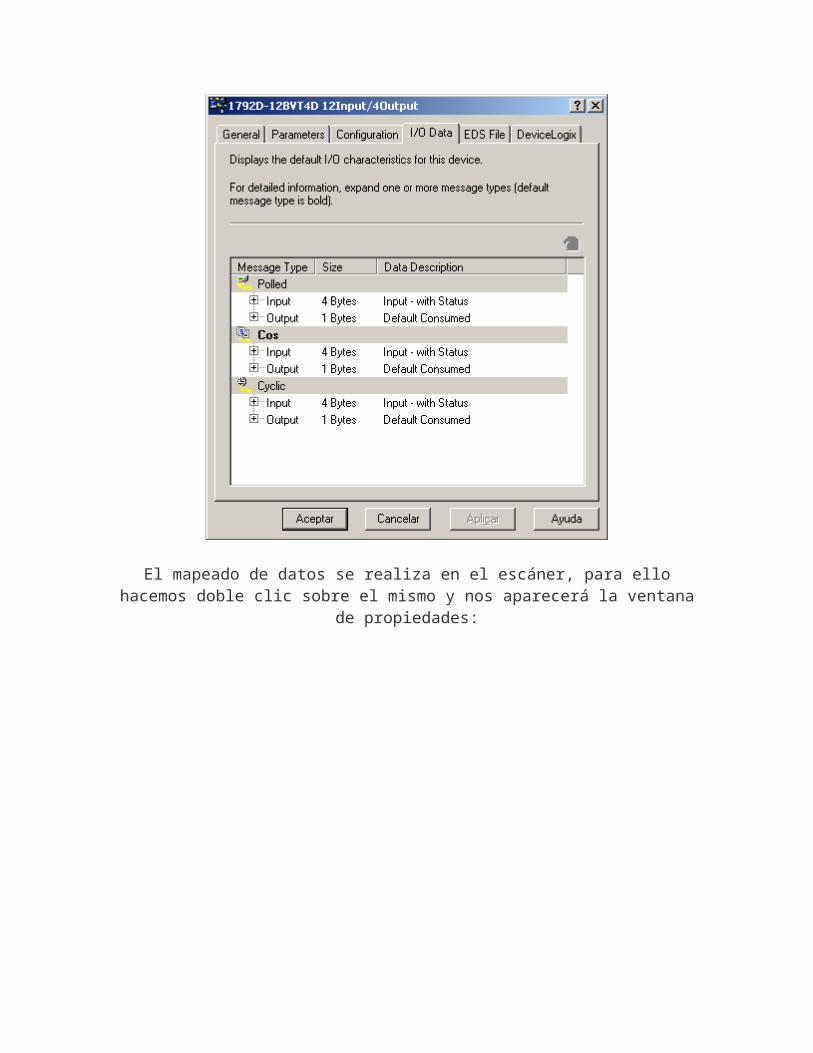
En cuanto al mapeado, la pestaña más interesante es la titulada I/O Data, ya que nos ofrece información sobre la cantidad de datos que va a consumir nuestro dispositivo y la forma en que van a ser transmitidos. En el caso del Maxum se enviará 1 byte y se recibirán 4. No todos los
dispositivos traen esta información.
El mapeado de datos se realiza en el escáner, para ello hacemos doble clic sobre el mismo y nos aparecerá la ventana de propiedades:
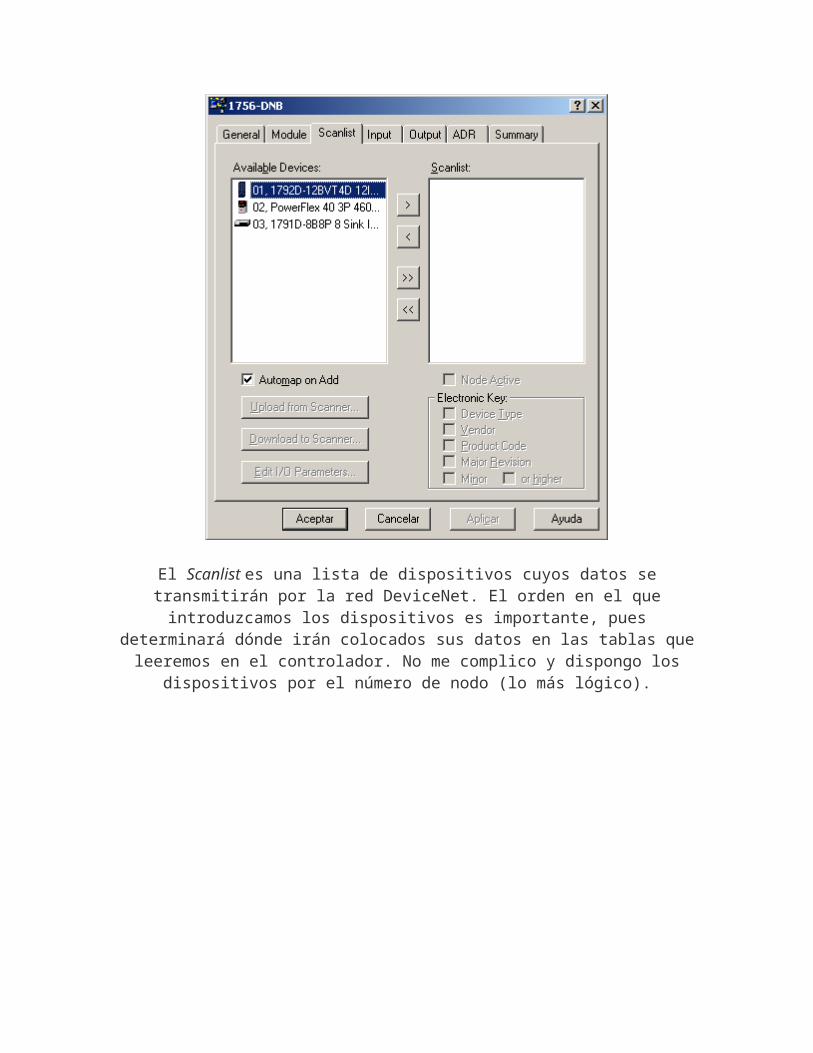
Vamos a la pestaña Scanlist y podremos ver nuestros dispositivos disponibles:
El Scanlist es una lista de dispositivos cuyos datos se transmitirán por la red DeviceNet. El orden en el que introduzcamos los dispositivos es importante, pues determinará dónde irán colocados sus datos en las
tablas que leeremos en el controlador. No me complico y dispongo los dispositivos por el número de nodo (lo más lógico).
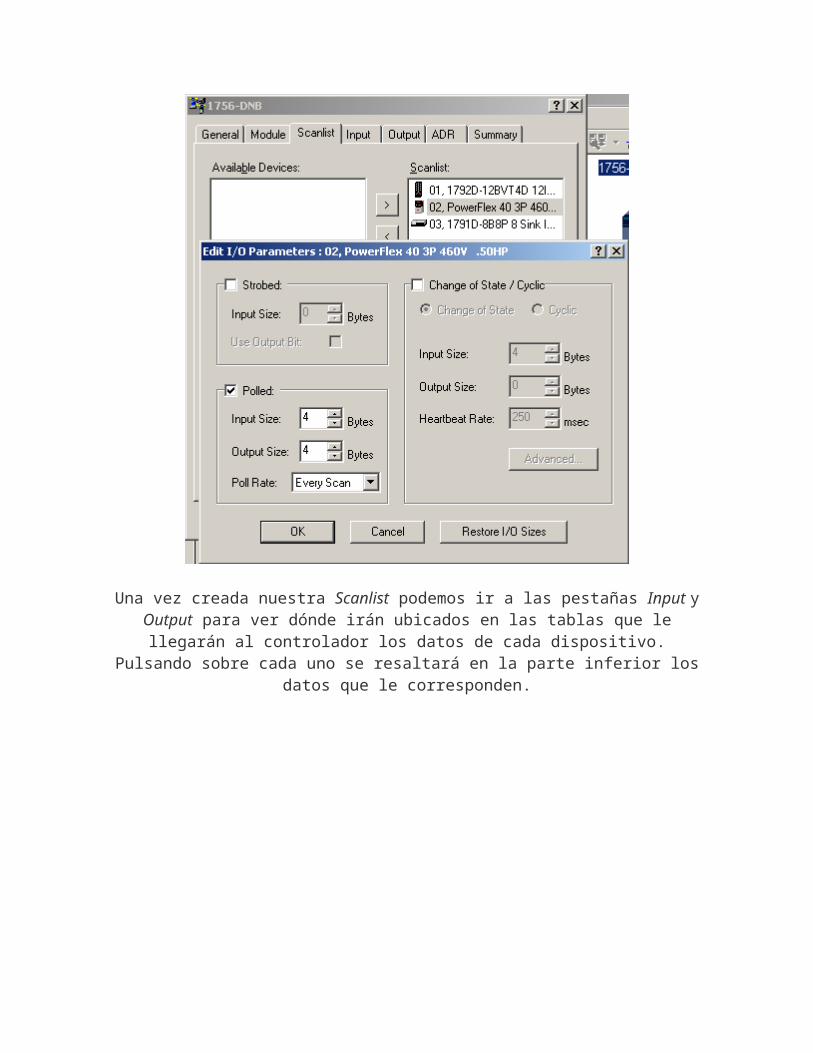
Si seleccionamos un dispositivo de la Scanlist y pulsamos sobre el botón Edit I/O Parameters... podremos modificar la cantidad de datos que
ocupará el dispositivo en la red. Lo normal es dejar el tamaño que traen por defecto, ya que suele venir especificado en el EDS. Sin embargo puede que nuestro dispositivo no tenga asignado tamaños para los datos de entrada / salida y tengamos que ser nosotros quienes los
introduzcamos a mano.

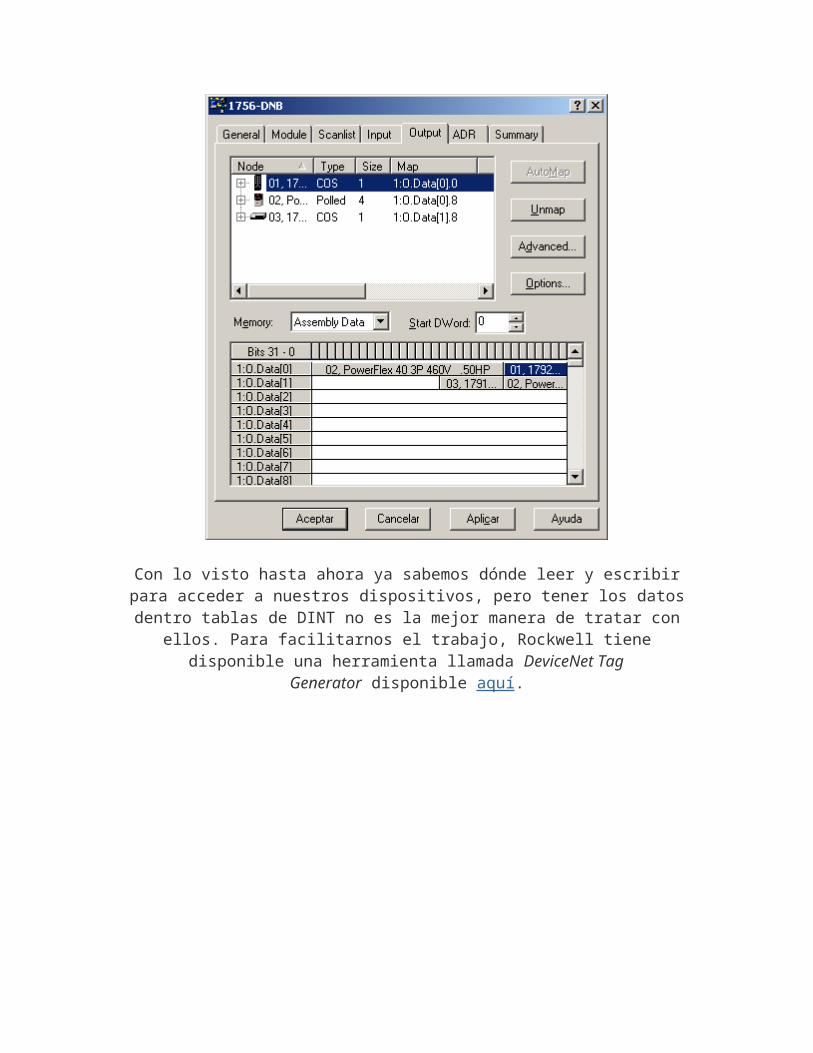
Una vez creada nuestra Scanlist podemos ir a las pestañas Input y Output para ver dónde irán ubicados en las tablas que le llegarán al
controlador los datos de cada dispositivo. Pulsando sobre cada uno se resaltará en la parte inferior los datos que le corresponden.

Con lo visto hasta ahora ya sabemos dónde leer y escribir para acceder a nuestros dispositivos, pero tener los datos dentro tablas de DINT no es la mejor manera de tratar con ellos. Para facilitarnos el trabajo, Rockwell
tiene disponible una herramienta llamada DeviceNet Tag Generator disponible aquí.
Lo que hace es leer la configuración asociada a un escáner de nuestro proyecto de RSLogix5000 y generar una serie de tags relativos a cada
dispositivo y unas rutinas donde irá separando los datos para cada dispositivo. Esta herramienta ahorra mucho trabajo pero debemos tener cuidado. Antes de usarla es recomendable hacer una copia de seguridad
de nuestro proyecto ya que le va a realizar modificaciones. También debemos estar seguros de tener la configuración de red definitiva, ya
que si la cambiamos y volvemos
Comandando variadores Sew Movidrive MDX61B a través de DeviceNet
Recientemente he tenido que poner en marcha unos variadores Sew Movidrive MDX61B para comandar unos motores acoplados a husillos, para realizar movimientos de traslación y elevación en una máquina.
Para este uso la configuración que hay que hacer es muy sencilla, lejos de las posibilidades que se le pueden exprimir a estos variadores:
control vectorial o modo servo. Como van a estar integrados en una red

DeviceNet, les he instalado la correspondiente tarjeta de comunicaciones DFD11B. En estas notas voy a resumir los pasos que he
dado para comandarlo desde un PLC CompactLogix.
Variadores Sew Movidrive MDX61B (perdón por la calidad de las fotos)
La instalación de los variadores está bien explicada en el completo manual de instrucciones de funcionamiento (en español). Si seguimos sus recomendaciones no tendremos la más mínima complicación, así
que me voy a centrar en la manera en la que los he configurado.
La tarjeta de comunicaciones DFD11B tiene una serie de interruptores DIP para configurarla. Con ellos le asignaremos una dirección de nodo en
la red DeviceNet (interruptores NA), la velocidad de comunicación (interruptores DR) y la longitud de los datos que se transmitirán
(interruptores PD). En mi caso tengo tres variadoes que les he asigando las direcciones 10, 15 y 20. La velocidad de comunicación la he fijado en
250 kbps y he asignado un 3 a los datos de proceso.
Alimento el variador y para parametrizarlo tengo una consola de programación DGB60B, que se conecta a través de un conector RJ10 y
permite hacer la puesta en marcha, modificar parámetros, diagnósticos, etc. También existe la opción de conexión a PC a través de adaptador
USB11A que nos permitirá hacer esto mismo desde un PC con el software Movitools MotionStudio (incluido con el adaptador). Si vamos a tener muchos variadores resulta interesante ya que nos ahorrará tiempo
en la parametrización y tiene un coste bajo (unos 60 €).
Consola de programación DGB60B
La consola es muy sencilla de usar. Tiene un botón para seleccionar el idioma y ponerla en español. Lo primero que voy a hacer es la puesta en marcha, que es básicamente decirle los datos de red y del motor. Si el
motor es Sew, probablemente ya vengan sus datos en la consola, con lo que solo tendremos que indicarle la referencia. Si no es así tendremos que leer en la placa de características la tensión nominal, frecuencia nominal, corriente nominal, factor de potencia y velocidad nominal.
Una vez realizada la puesta en marcha necesito modificar algunos parámetros. Como vamos a comandar el variador desde DeviceNet, voy a los parámetros P100 (fuente de consigna) y P101 (fuente de control) y los ajusto a Bus de campo (fieldbus). También debemos deshabilitar
los comandos que por defecto tienen las entradas binarias de la 1 a la 7, en los parámetros del P600 al P606 seleccionaremos Sin función. La
entrada digital 0 está asignada al desbloqueo del regulador y es imperativo cablearla por razones de seguridad. Si las rampas de
aceleraciones que vienen configuradas por defecto no son apropiadas

para nuestra aplicación, en los parámetros P130 al P133 podremos ajustarlas.
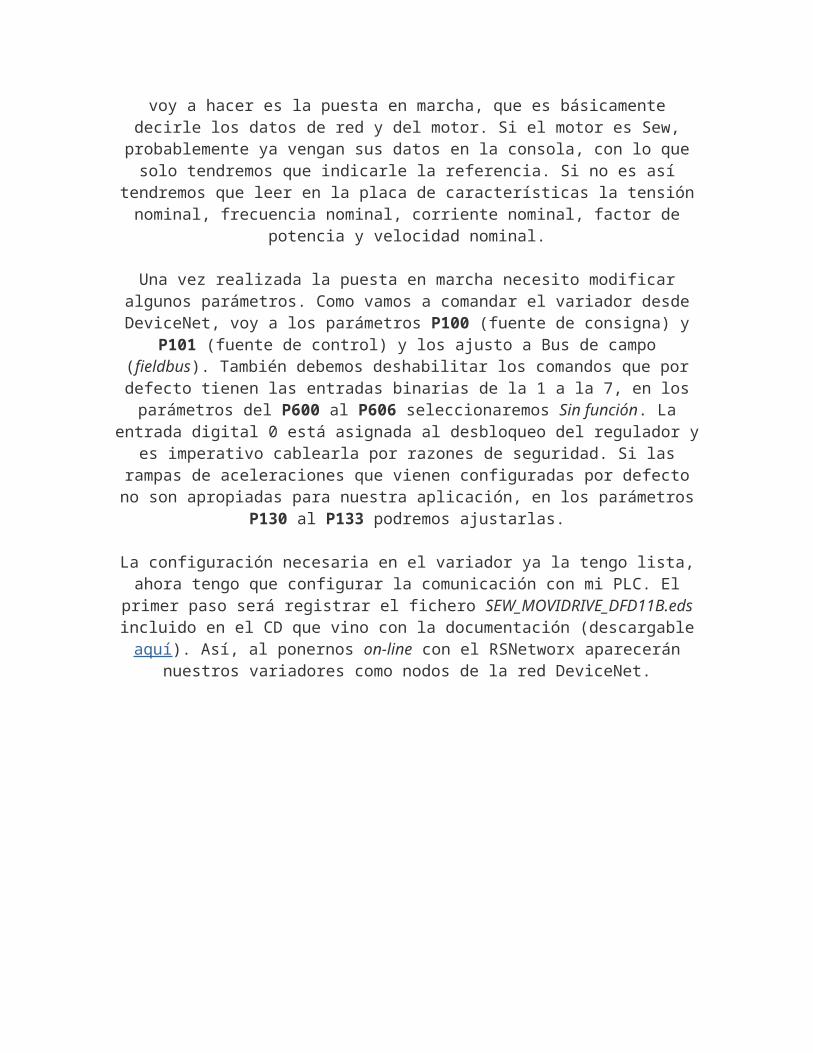
La configuración necesaria en el variador ya la tengo lista, ahora tengo que configurar la comunicación con mi PLC. El primer paso será registrar el fichero SEW_MOVIDRIVE_DFD11B.eds incluido en el CD que vino con
la documentación (descargable aquí). Así, al ponernos on-line con el RSNetworx aparecerán nuestros variadores como nodos de la red
DeviceNet.
Si hacemos doble clic sobre cualquiera de ellos accederemos a su ventana de configuración.

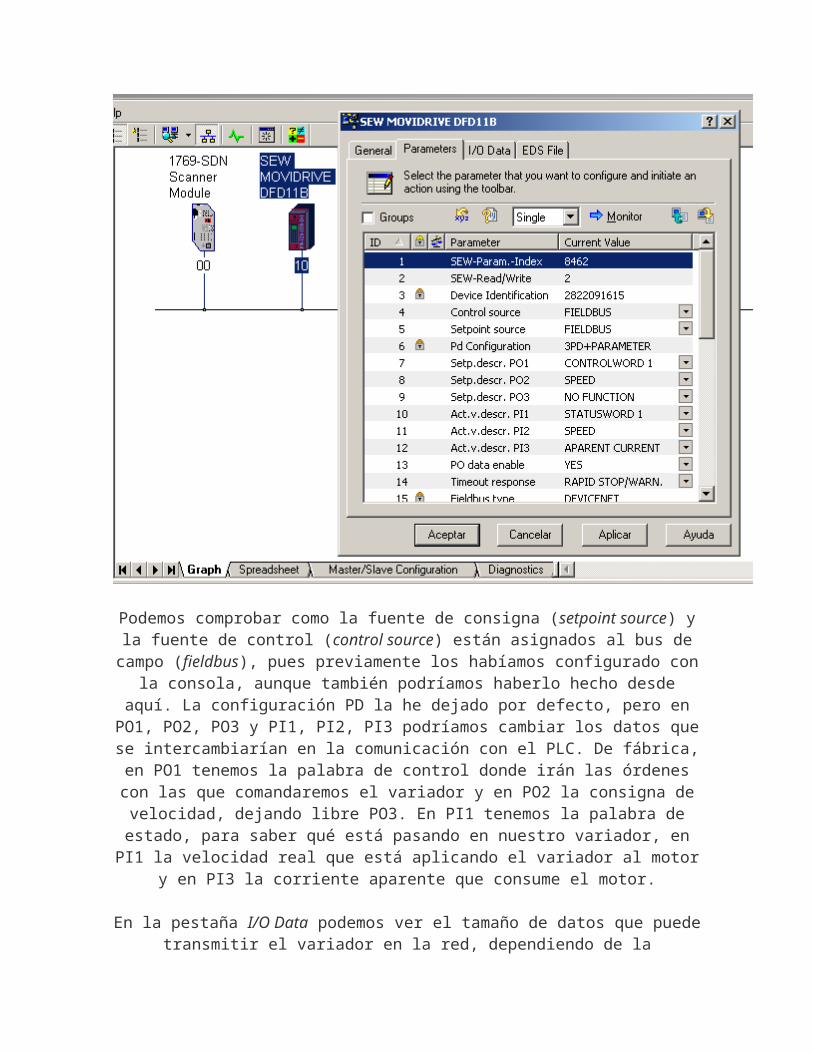
Podemos comprobar como la fuente de consigna (setpoint source) y la fuente de control (control source) están asignados al bus de campo
(fieldbus), pues previamente los habíamos configurado con la consola, aunque también podríamos haberlo hecho desde aquí. La configuración
PD la he dejado por defecto, pero en PO1, PO2, PO3 y PI1, PI2, PI3 podríamos cambiar los datos que se intercambiarían en la comunicación con el PLC. De fábrica, en PO1 tenemos la palabra de control donde irán las órdenes con las que comandaremos el variador y en PO2 la consigna de velocidad, dejando libre PO3. En PI1 tenemos la palabra de estado, para saber qué está pasando en nuestro variador, en PI1 la velocidad
real que está aplicando el variador al motor y en PI3 la corriente aparente que consume el motor.
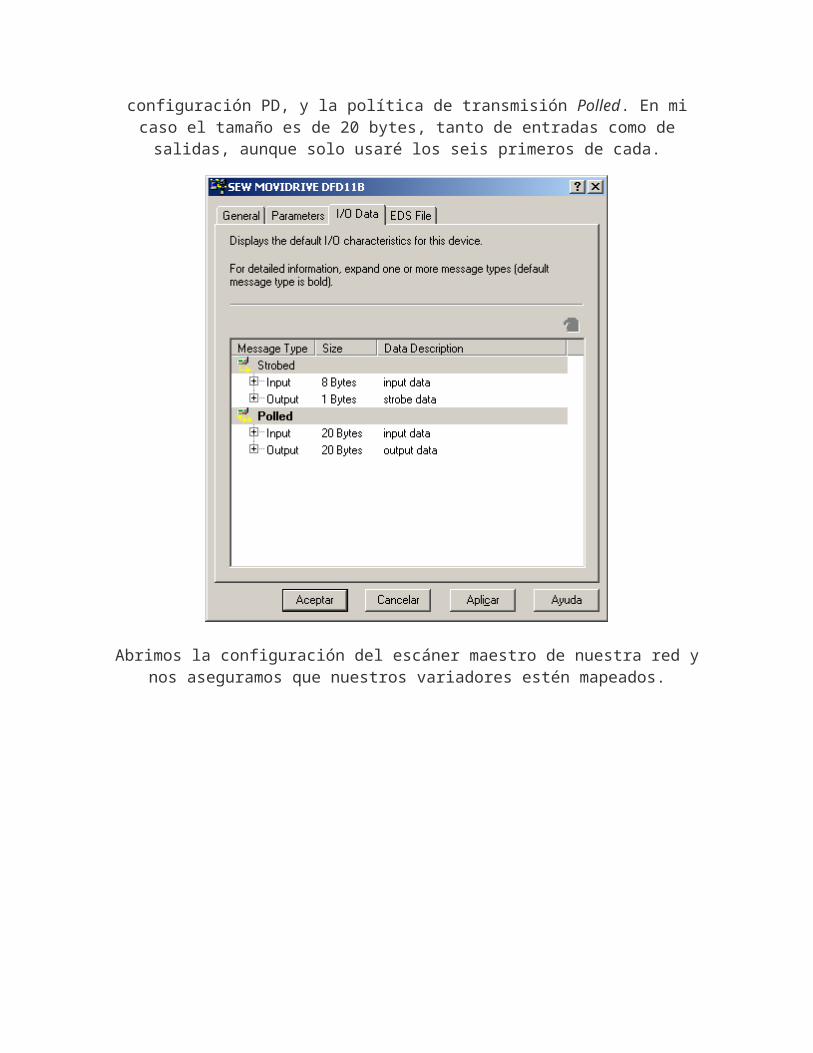
En la pestaña I/O Data podemos ver el tamaño de datos que puede transmitir el variador en la red, dependiendo de la configuración PD, y la
política de transmisión Polled. En mi caso el tamaño es de 20 bytes, tanto de entradas como de salidas, aunque solo usaré los seis primeros
de cada.

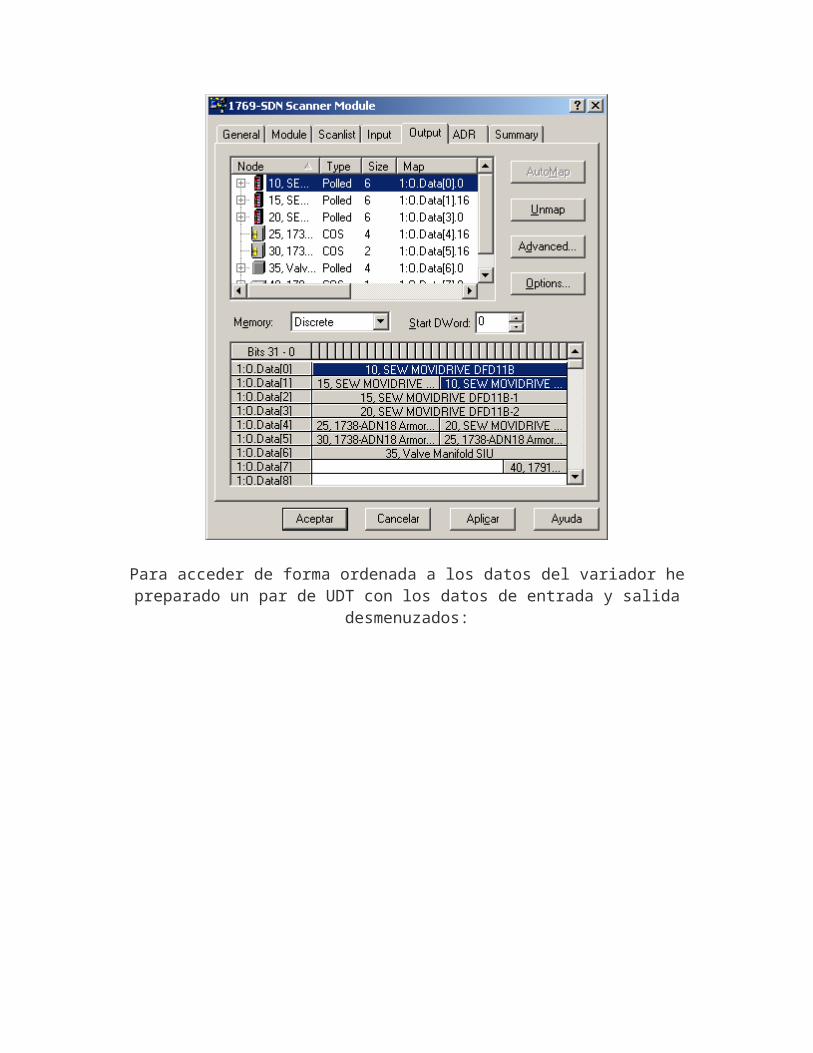
Abrimos la configuración del escáner maestro de nuestra red y nos aseguramos que nuestros variadores estén mapeados.
En las pestañas Input y Output podemos comprobar en qué zonas de memoria nos vendrán los datos de los variadores en la tabla de datos
del escáner DeviceNet.
Para acceder de forma ordenada a los datos del variador he preparado un par de UDT con los datos de entrada y salida desmenuzados:

Declaro una par de tablas de tres elementos con el formato de las UDT anteriores:

Y los sincronizo con los tags de entradas y salidas del escáner DeviceNet con un par de renglones como los siguientes:
(Previamente he mapeado la red DeviceNet con la herramienta DeviceNet Tag Generator)
De la palabra de control tan solo necesito tres bits, INHIBIT que debe estar a cero para activar el variador, ENABLE_RAPID_STOP que debo poner a uno para que el motor pueda ponerse en marcha y finalmente
ENABLE_STOP para arrancar el variador.
Y no olvidar poner un valor de consigna adecuado:
Con esto ya tendría una programación básica de los variadores. Cabría completarla con la configuración de límites de recorrido, visualizaciones
de estado, reseteo de fallos, etc.
En resumen puedo decir que estos variadores funcionan impecablemente. Es la primera vez que trabajo con ellos pero nuestro cliente ya lleva utilizándolos durante años, sin dar ningún problema. La
documentación es muy completa y en perfecto español. Tuve que llamar en una ocasión al servicio técnico para resolver una duda y la atención
fue rápida y efectiva.
Como siempre, cualquier comentario será bienvenido.