tema 9 metodos numericos en geotecnia - … · 9.1. introducciÓn en este tema se introducen los...
TRANSCRIPT
UNIVERSIDAD POLITÉCNICA DE CATALUÑA INGENIERÍA DE LA CONSTRUCCIÓN
___________________________________________________
INGENIERÍA GEOTECNICA
APUNTES TEMA 9 ____________________________________________________
Índice 9.1. INTRODUCCIÓN ........................................................................................................................................... 2 9.2. METODO DE DIFERENCIAS FINITAS PARA LA ECUACIÓN DE FLUJO EN RÉGIMEN ESTACIONARIO ................................................................................................................................................... 3
9.2.1 INTRODUCCIÓN ..................................................................................................................................... 3 9.2.2 ECUACIÓN DE FLUJO EN DIFERENCIAS FINITAS........................................................................... 3 9.2.3. CONDICIONES DE CONTORNO .......................................................................................................... 4 9.2.4. RESOLUCIÓN DE PROBLEMAS TRANSITORIOS ............................................................................. 5
9.3. CONCEPTOS BÁSICOS DEL MÉTODO DE ELEMENTOS FINITOS APLICADOS A LA ECUACIÓN DE EQUILIBRIO EN MEDIO CONTINUO ......................................................................................................... 6
9.3.1. INTRODUCCIÓN .................................................................................................................................... 6 9.3.2. DEFORMACIONES ................................................................................................................................. 7 9.2.3. FUNCIONES DE FORMA O INTERPOLACIÓN .................................................................................. 8 9.3.4. DEFORMACIONES USANDO LAS FUNCIONES DE FORMA ........................................................ 10 9.3.5. TEOREMA DE GREEN ......................................................................................................................... 14 9.3.6. ECUACIONES DE EQUILIBRIO DE TENSIONES............................................................................. 14
9.4. EL PROCESO DE MODELACIÓN .............................................................................................................. 16 9.5. REFERENCIAS ............................................................................................................................................. 17 APENDICE I. DESCRIPCIÓN GENERAL DEL PROGRAMA PLAXIS .......................................................... 18
DATOS GENERALES / GENERAL SETTINGS ............................................................................................ 21 GENERACIÓN DE LA GEOMETRIA ............................................................................................................ 22 EJEMPLO 1. ZAPATA CIRCULAR EN ARENA .......................................................................................... 23
APENDICE 2 DESCRIPCIÓN DE CODE_BRIGHT Y GID .............................................................................. 41 1. DEFINICIÓN ................................................................................................................................................ 42 2. GEOMETRÍA ............................................................................................................................................... 43 3. DATOS A INTRODUCIR PARA CODE_BRIGHT .................................................................................... 45
9.1. INTRODUCCIÓN En este tema se introducen los métodos numéricos en geotecnia. Se empieza por el método de diferencias finitas aplicado a la ecuación de flujo en régimen estacionario. Las diferencias finitas es un método basado en la aproximación como diferencias de la ecuación diferencial a resolver. Puesto que una derivada es un cociente de diferencias pasando al límite para un incremento de coordenada espacial o temporal, resulta que el método es muy natural. El método de diferencias finitas se ha aplicado mucho a la ecuación de conservación de agua (flujo) incluyendo también una variante que se conoce como diferencias finitas integradas o volúmenes finitos. En segundo lugar se pasa a explicar el método de elementos finitos. Como este método se desarrolló inicialmente en el contexto de problemas mecánicos, se ha considerado adecuado aprovechar las ecuaciones de equilibrio para desarrollar la metodología del método de los elementos finitos. Se define inicialmente una interpolación en triángulo se segundo orden a utilizar para interpolar el campo de desplazamientos a partir de los desplazamientos nodales. A partir de esta interpolación se pueden calcular deformaciones usando dicho campo de desplazamientos. Alternativamente, se introduce la interpolación mediante funciones de forma, lo que permite una metodología muy generalizable. Se plantea todo el proceso para triángulos de segundo orden por ser este el primer elemento en el programa de elementos finitos PLAXIS, del que se incluye una descripción de uso en el Apéndice 1. En el Apéndice 2 se incluye una breve descripción de CODE_BRIGHT-GiD que es un programa para resolver problemas generales acoplados en medio porosos. Finalmente se incluyen algunos comentarios sobre el proceso de modelación.

9.2. METODO DE DIFERENCIAS FINITAS PARA LA ECUACIÓN DE FLUJO EN RÉGIMEN ESTACIONARIO 9.2.1 INTRODUCCIÓN El método de diferencias finitas se ha utilizado tradicionalmente para ecuaciones de difusión, como por ejemplo la ecuación de flujo de agua en medio poroso. En cambio, tiene menos utilidad para las ecuaciones de equilibrio de tensiones. Por ello, para explicar este método se utilizará la ecuación de flujo de agua en medio poroso saturado. 9.2.2 ECUACIÓN DE FLUJO EN DIFERENCIAS FINITAS Se considera la siguiente ecuación de flujo en régimen estacionario:
x y
h hK K W
x x y y
Para obtener la ecuación correspondiente a una celda C (centro) se tomará el esquema de la figura adjunta en el que N, S, E, W son las celdas contiguas, respectivamente, al norte, sur, este y oeste de la celda C.
N
W C E
S
Celdas para el balance en la celda C para el método de diferencias finitas.
Las derivadas del nivel piezométrico h respecto a x se obtienen como:
x
hh
x
h
x
hh
x
h WC
WC
CE
CE
donde x es la anchura de la celda.
Usando las dos derivadas anteriores se puede calcular la derivada del flujo, es decir:
2
2CE WC E C Wx x x
C
h hh h hh x x
K K Kx x x x
donde se ha supuesto que Tx es constante en CE y WC. Si no fuese así bastaría escribir:
2
2
CE WCx xx E C x C WCE WC
xC
CE CE WC WCx E x x C W x
h hK K
K h h K h hh x xK
x x x x
K h K K h h K
x

que, como se puede observar, permite considerar la heterogeneidad del medio.
Para la derivada en la dirección vertical análogamente se obtiene:
2
2CN SC N C Sy y y
C
h hy y h h hh
K K Ky y y y
donde se ha supuesto que Ty es constante en CN y SC.
Finalmente al substituir todos los pasos intermedios en la ecuación general de flujo resulta:
2 2
2 2N C S E C Wy x
h h h h h hK K W
y x
Esta forma se puede trasformar multiplicando por x, y:
E C W C N C S Cx x y y
h h h h h h h hK y K y K x K x W x y
x x y y
que representa el balance sobre la celda C ya que puede observarse que se suman los caudales entrantes (flujoanchura) y se iguala a la variación de almacenamiento menos el término de recarga (W tiene unidades de volumen de agua recargada por unidad de area y por unidad de tiempo).
Representación típica de un dominio bidimensional mediante diferencias finitas.
que como puede observarse son adimensionales.
El último paso es realizar el ensamblaje y pasar a la resolución del sistema de ecuaciones:
Ah b
Siendo A una matriz de coeficientes, h el vector de incógnitas y b el término independiente.
9.2.3. CONDICIONES DE CONTORNO

Una vez que se ha construido el sistema de ecuaciones algebraicas basado en la ecuación diferencial y en las celdas, hay que imponer condiciones de contorno. Pueden ser de nivel piezométrico constante o de caudal constante.
Nivel fijo o conocido
Se puede incorporar de dos formas diferentes. La primera consiste en suprimir la ecuación de la celda donde quiere imponerse el nivel fijo. Una vez hecho esto, para eliminar la columna correspondiente hay que pasar los términos que tengan el nivel ahora conocido al segundo miembro del sistema de ecuaciones.
La segunda forma consiste en añadir un caudal a la ecuación de la celda en la que se desea imponer el nivel conocido calculado mediante la ecuación:
)( HhQ CC
donde sea suficientemente grande como para que hc H.
Es preciso indicar que el nivel impuesto puede ser variable en el tiempo, es decir, H=H(t) y por tanto se trata de nivel conocido aunque no fijo.
Caudal Fijo o conocido
Se trata de imponer que QC=Q lo que se consigue simplemente sumando este caudal a la ecuación de la celda C, por ejemplo:
E C W C N C S Cx x y y
h h h h h h h hK y K y K x K x
x x y y
W x y Q
(Q>0 equivale a bombeo de agua del acuífero y Q<0 equivale a inyección de agua al acuífero).
Condición de tipo mixto
Se trata de imponer un caudal calculado como:
QHhQ CC )(
que como puede verse establece una relación lineal entre el caudal impuesto (Qc) y el nivel piezométrico en el nudo (hc). Esta condición es suficientemente general para contener la de nivel conocido y la de caudal conocido como casos particulares.
9.2.4. RESOLUCIÓN DE PROBLEMAS TRANSITORIOS
La ecuación de flujo en medio poroso en régimen transitorio se distingue de la ecuación en régimen estacionario por el término de almacenamiento. Este término viene de la compresibilidad del agua y del acuífero. La combinación de la permeabilidad con el coeficiente de almacenamiento de forma que la ecuación se convierta en la ecuación de difusión es un proceso análogo al que se usa para obtener el coeficiente de consolidación en la ecuación de consolidación.

9.3. CONCEPTOS BÁSICOS DEL MÉTODO DE ELEMENTOS FINITOS APLICADOS A LA ECUACIÓN DE EQUILIBRIO EN MEDIO CONTINUO En esta sección se presenta el método de elementos finitos partiendo de los conceptos de interpolación y aplicando el método de residuos ponderados. 9.3.1. INTRODUCCIÓN El campo de desplazamientos en un elemento u = (ux uy)
T se obtiene en función de los valores discretos de los desplazamientos en los nudos: v = (v1
x v1y ... )T usando las funciones de
interpolación ensambladas en una matriz N:
vNu
o en forma explícita: 1 2
1 2
1 21 2
( , ) ...
( , ) ...
x x x
y y y
u x y v N v N
u x y v N v N
volveremos mas adelante a este planteamiento. Ejemplo para el triangulo de 6 nudos:
254
23210
254
23210
),(
),(
ybxybxbybxbbyxu
yaxyaxayaxaayxu
y
x
donde las 12 constantes dependen de los valores de los desplazamiento nodales. Para determinar estas constantes basta con particularizar en los 6 valores de desplazamiento conocidos en los seis nudos del triángulo. Sea un triángulo cuyos nudos son:
1 2 3 4 5 6
1 2 3 4 5 6
0 1 0 0.5 0.5 0
0 0 1 0 0.5 0.5
x x x x x x
y y y y y y
Y los desplazamientos en dichos nudos son:
1 1
2 2
3 3
4 4
5 5
6 6
0.01 0.01
0.05 0.02
0.06 0.03
0.07 0.02
0.01 0.05
0.02 0.07
x y
x y
x y
x y
x y
x y
v v
v v
v v
v v
v v
v v
Para los desplazamientos en la dirección x habría que resolver el siguiente sistema de ecuaciones:
2 20 1 2 3 4 5
2 20 1 2 3 4 5
2 20 1 2 3 4 5
2 20 1 2 3 4 5
2 20 1 2 3 4 5
2 20 1 2 3 4 5
0.01
0.05
0.06
0.07
0.01
0.02
a a x a y a x a xy a y
a a x a y a x a xy a y
a a x a y a x a xy a y
a a x a y a x a xy a y
a a x a y a x a xy a y
a a x a y a x a xy a y
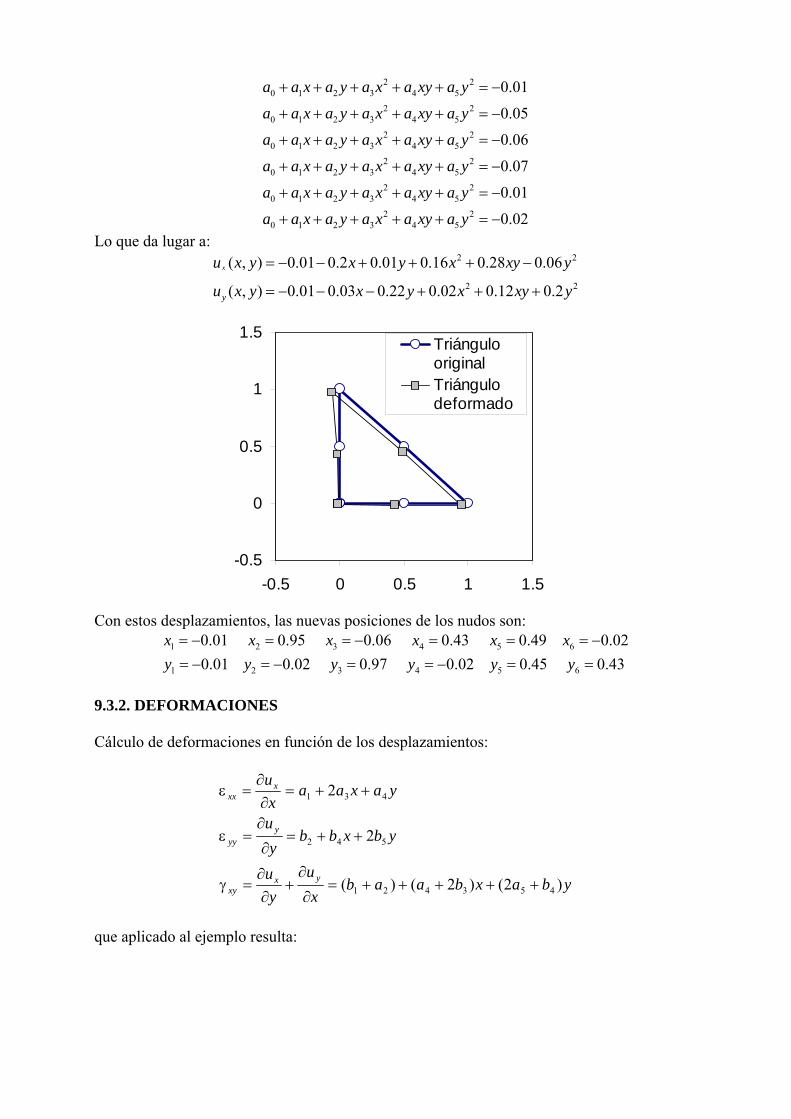
Lo que da lugar a: 2 2
2 2
( , ) 0.01 0.2 0.01 0.16 0.28 0.06
( , ) 0.01 0.03 0.22 0.02 0.12 0.2
x
y
u x y x y x xy y
u x y x y x xy y
-0.5
0
0.5
1
1.5
-0.5 0 0.5 1 1.5
TriángulooriginalTriángulodeformado
Con estos desplazamientos, las nuevas posiciones de los nudos son:
1 2 3 4 5 6
1 2 3 4 5 6
0.01 0.95 0.06 0.43 0.49 0.02
0.01 0.02 0.97 0.02 0.45 0.43
x x x x x x
y y y y y y
9.3.2. DEFORMACIONES Cálculo de deformaciones en función de los desplazamientos:
ybaxbaabx
u
y
u
ybxbby
u
yaxaax
u
yxxy
yyy
xxx
)2()2()(
2
2
453421
542
431
que aplicado al ejemplo resulta:

( , )0.2 2 0.16 0.28
( , )0.22 0.12 2 0.2
0.01 0.28 2 0.06 0.03 2 0.02 0.12
0.02 0.32
x
y
x
y
yxxy
u x yx y
xu x y
x yx
uux y x y
y x
x
que corresponde al ejemplo descrito. En x=0.33 e y=0.33, se pueden calcular las siguientes deformaciones:
0.2 2 0.16 0.28 0.187
0.22 0.12 2 0.2 0.048
0.02 0.32 0.085
0.187 0.048 0.23 deformacion volumetrica
x
y
xy
v
x y
x y
x
En x=0.60 e y=0.20, se pueden calcular las siguientes deformaciones:
0.2 2 0.16 0.28 0.064
0.22 0.12 2 0.2 0.044
0.02 0.32 0.172
0.064 0.044 0.02 deformacion volumetrica
x
y
xy
v
x y
x y
x
Como se ha trabajado con el criterio de signos habitual en mecánica de medios continuos (contracción negativa) resulta que en dichos punto del triángulo, se producen compresiones. 9.2.3. FUNCIONES DE FORMA O INTERPOLACIÓN Por otro lado las funciones de interpolación se pueden poner en función de coordenadas locales:
4 )12(
4 )12(
4 )12(
63
52
41
NN
NN
NN
que como puede observarse toman valores de 1 en su respectivo nudo y 0 en los demás. Estas funciones se pueden poner en función de (x,y) para determinar la forma anteriormente descrita. Las coordenadas locales suman la unidad y por tanto se pueden reducir a 2 en lugar de 3.
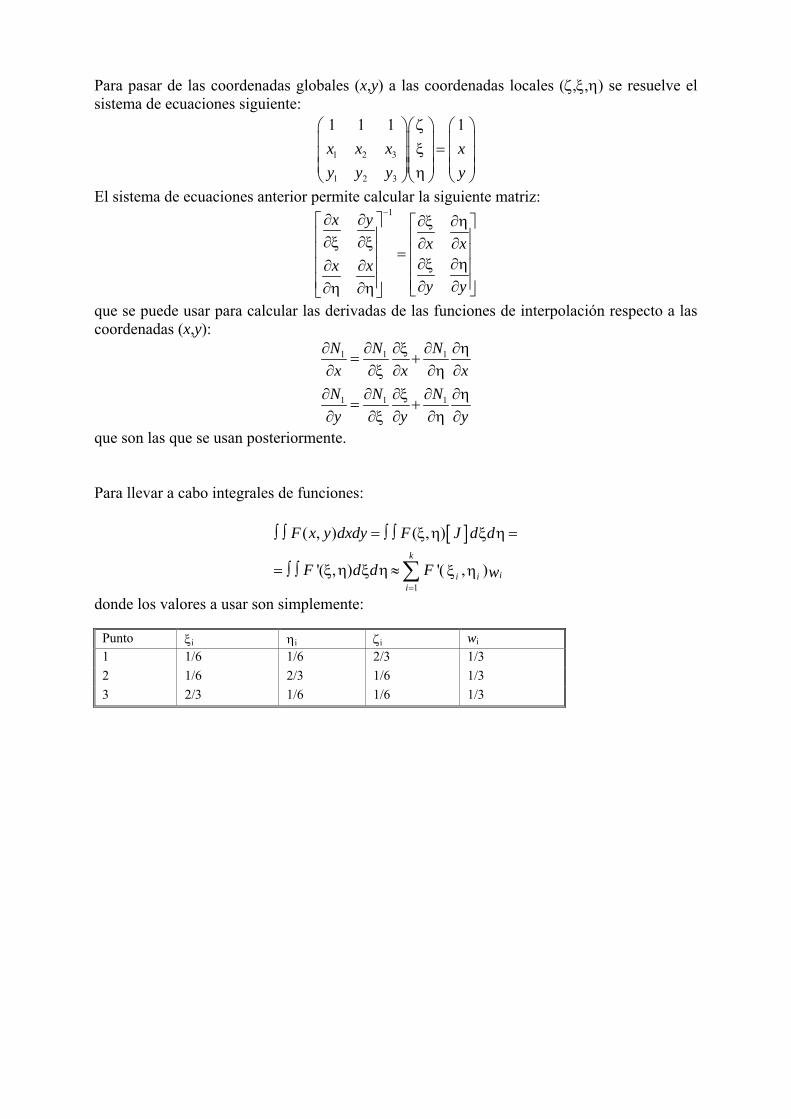
Para pasar de las coordenadas globales (x,y) a las coordenadas locales (,,) se resuelve el sistema de ecuaciones siguiente:
1 2 3
1 2 3
1 1 1 1
x x x x
y y y y
El sistema de ecuaciones anterior permite calcular la siguiente matriz: 1
x y
x x
x xy y
que se puede usar para calcular las derivadas de las funciones de interpolación respecto a las coordenadas (x,y):
1 1 1
1 1 1
N N N
x x x
N N N
y y y
que son las que se usan posteriormente. Para llevar a cabo integrales de funciones:
1
( , ) ( , )
'( , ) '( , )k
ii ii
F x y dxdy F J d d
F d d F w
donde los valores a usar son simplemente:
Punto i i i wi 1 1/6 1/6 2/3 1/3
2 1/6 2/3 1/6 1/3
3 2/3 1/6 1/6 1/3

9.3.4. DEFORMACIONES USANDO LAS FUNCIONES DE FORMA Se tiene el campo de desplazamientos en función de los desplazamientos nodales y las funciones de forma o interpolación siguiente:
1 21 2
1 21 2
( , ) ...
( , ) ...
x x x
y y y
u x y v N v N
u x y v N v N
Cálculo de deformaciones en función de los desplazamientos usando las funciones de forma:
1 21 2
1 21 2
1 2 1 21 2 1 2
...
...
... ...
xxx x x
yyy x x
yxxy x x x x
u N Nv v
x x xu N N
v vy y y
uu N N N Nv v v v
y x y y x x
que se basa en que los desplazamientos nodales no dependen de la posición. Uso de las funciones de forma en el ejemplo que ya habíamos visto: Sea un triángulo cuyos nudos son:
1 2 3 4 5 6
1 2 3 4 5 6
0 1 0 0.5 0.5 0
0 0 1 0 0.5 0.5
x x x x x x
y y y y y y
Para pasar de las coordenadas globales (x,y) a las coordenadas locales (,,) se resuelve el sistema de ecuaciones siguiente:
1 1 1 1
0 1 0
0 0 1
x
y
que se puede poner como: 1
x
y
de forma que: 1
11 0 1 0
0 1 0 1
x y
x x
x xy y
que se usan para calcular:
1 1 1
1 1 1
N N N
x x x
N N N
y y y
recordando que:

4 )12(
4 )12(
4 )12(
63
52
41
NN
NN
NN
y por último solo queda:
1 21 2
1 21 2
1 2 1 21 2 1 2
...
...
... ...
xxx x x
yyy x x
yxxy x x x x
u N Nv v
x x xu N N
v vy y y
uu N N N Nv v v v
y x y y x x
En este caso:
1 1 1
1 1 1
2 2 2
2 2 2
3 3 3
4 1 1 1 0 0 4 1
4 1 1 0 0 1 0
4 1 1 0 0 4 1
4 1 0 0 1 0
0 1 4 1 0
N N N
x x x
N N N
y y y
N N N
x x x
N N N
y y y
N N N
x x x
3 3 3
0
0 0 4 1 1 4 1N N N
y y y
etc
1
x
y
1 x y
y por último solo queda substituir:
1 2 3 1 231 2
1 2
... 4 1 4 1 0 ...
4 (1 ) 1 4 1 0 ...
xxx x x x x x
x x
u NN Nv v v v v
x x x x
x y v x v
es decir que también se obtienen funciones lineales de los desplazamientos nodales.
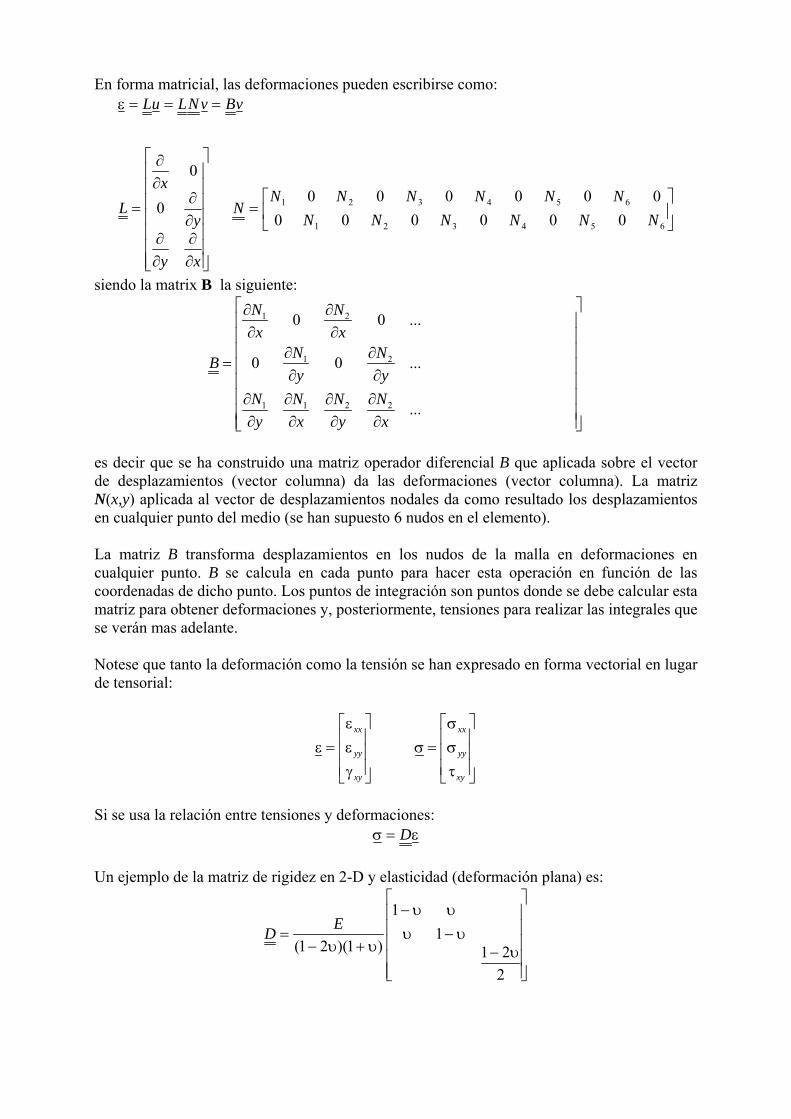
En forma matricial, las deformaciones pueden escribirse como:
654321
654321
000000
000000 0
0
NNNNNN
NNNNNNN
xy
y
x
L
vBvNLuL
siendo la matrix B la siguiente:
1 2
1 2
1 1 2 2
0 0 ...
0 0 ...
...
N N
x xN N
By y
N N N N
y x y x
es decir que se ha construido una matriz operador diferencial B que aplicada sobre el vector de desplazamientos (vector columna) da las deformaciones (vector columna). La matriz N(x,y) aplicada al vector de desplazamientos nodales da como resultado los desplazamientos en cualquier punto del medio (se han supuesto 6 nudos en el elemento). La matriz B transforma desplazamientos en los nudos de la malla en deformaciones en cualquier punto. B se calcula en cada punto para hacer esta operación en función de las coordenadas de dicho punto. Los puntos de integración son puntos donde se debe calcular esta matriz para obtener deformaciones y, posteriormente, tensiones para realizar las integrales que se verán mas adelante. Notese que tanto la deformación como la tensión se han expresado en forma vectorial en lugar de tensorial:
xx xx
yy yy
xy xy
Si se usa la relación entre tensiones y deformaciones:
D
Un ejemplo de la matriz de rigidez en 2-D y elasticidad (deformación plana) es:
2
211
1
)1)(21(
ED

xx xx
yy yy
xy xy
y si se combinan queda:
1
1 = (1 2 )(1 )
1 2
2
xx xx
yy yy
xy xy
E
o en forma no matricial:
1(1 2 )(1 )
1(1 2 )(1 )
2(1 )
xx xx yy
yy xx yy
xy xy
E
E
E
si en cambio se despejan las deformaciones queda:
(1 )1
(1 )1
2(1 )
xx xx yy
yy yy xx
xy xy
E
E
E
Ejercicio: Determinar la matriz de rigidez en 3D, partiendo de las ecuaciones de la elasticidad:
1 2(1 )
1 2(1 )
1 2(1 )
xx xx yy zz xy xy
yy yy zz xx xz xz
zz zz xx yy yz yz
E E
E E
E E

9.3.5. TEOREMA DE GREEN Sean A y B un escalar y un vector, respectivamente:
v s v v
A Bdv ABds A Bdv
caso particular es la integral por partes. El escalar A puede ser también de orden superior, es decir, un vector o una matriz. 9.3.6. ECUACIONES DE EQUILIBRIO DE TENSIONES
0 pLT
es la forma de escribir las ecuaciones de equilibrio de tensiones según la nomenclatura de esta presentación. El método de residuos ponderados o método de Galekin consiste en suponer que esta ecuación se va a cumplir de forma no exacta en cada punto sino en promedio en todo el dominio. Esto es:
MjdVpLN j
v
TT
j,1
es decir, que se va a minimizar el error en unos puntos que precisamente son los nudos. Se ha introducido un término adicional que representa las condiciones de contorno. Por último, para reducir el orden de las derivadas parciales se aplica el teorema de Green que equivale a hacer una integral por partes:
0 1,
0 1,
1,
T T T
j jv v
TT T
j j jv s v
TT T
j j jv s v
N L dV N pdV j M
L N dV N tdS N pdV j M
L N dV N tdS N pdV j M
Por otro lado, la ecuación constitutiva del material puede escribirse como:
D
siendo D la matriz de rigidez del material. Si las deformaciones se escriben en función de los desplazamientos resulta:
vBD
y substituyendo en la de equilibrio resulta:
MjdVpBdStNdVvBDBv
T
js
T
jv
j
T
j,1
Estas integrales sobre todo el dominio en realidad acaban siendo sobre los elementos ya que las funciones de interpolación y ponderación solo son diferentes de cero en los elementos
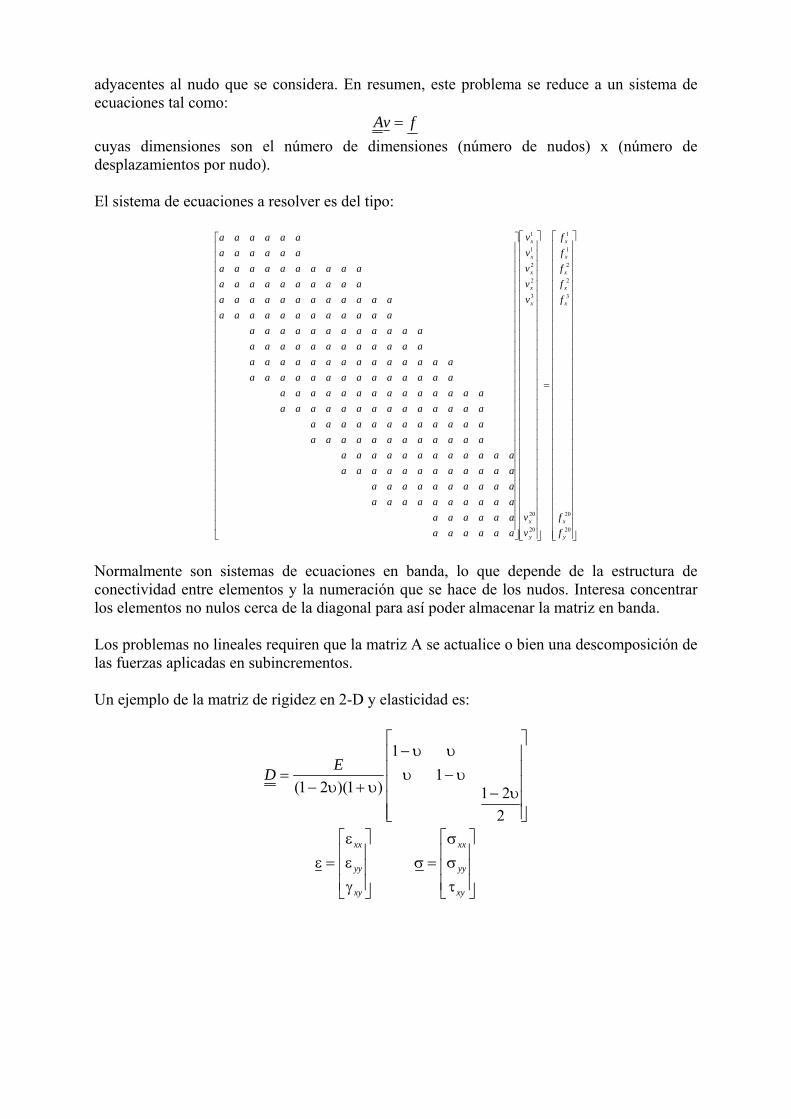
adyacentes al nudo que se considera. En resumen, este problema se reduce a un sistema de ecuaciones tal como:
fvA
cuyas dimensiones son el número de dimensiones (número de nudos) x (número de desplazamientos por nudo). El sistema de ecuaciones a resolver es del tipo:
20
20
3
2
2
1
1
20
20
3
2
2
1
1
y
x
x
x
x
x
x
y
x
x
x
x
x
x
f
f
f
f
f
f
f
v
v
v
v
v
v
v
aaaaaa
aaaaaa
aaaaaaaaaa
aaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaaaa
aaaaaaaaaaaaaa
aaaaaaaaaaaaaa
aaaaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaaaa
aaaaaaaaaa
aaaaaaaaaa
aaaaaa
aaaaaa
Normalmente son sistemas de ecuaciones en banda, lo que depende de la estructura de conectividad entre elementos y la numeración que se hace de los nudos. Interesa concentrar los elementos no nulos cerca de la diagonal para así poder almacenar la matriz en banda. Los problemas no lineales requiren que la matriz A se actualice o bien una descomposición de las fuerzas aplicadas en subincrementos. Un ejemplo de la matriz de rigidez en 2-D y elasticidad es:
2
211
1
)1)(21(
ED
xx xx
yy yy
xy xy
9.4. EL PROCESO DE MODELACIÓN Desarrollar un modelo mediante alguna técnica numérica en geotecnia requiere una serie de pasos previos a tomar un programa y ejecutarlo. En primer lugar hay que abordar el problema simplificándolo tanto desde el punto de vista de los procesos como desde el punto de vista geométrico y temporal. Normalmente se puede construir un modelo altamente complejo pues las interacciones en medio poroso son grandes y siempre es posible encontrar interrelaciones o acoplamientos que tengan alguna repercusión aunque sea pequeña. La teoría de la consolidación es un buen ejemplo de problema acoplado hidráulico y mecánico. En otros casos puede interesar resolver el problema hidráulico exclusivamente o el problema mecánico, por separado. Para estudiar las pérdidas de agua a través del terreno bajo una presa o azud, puede ser suficiente con la resolución del problema de flujo tanto si es en régimen estacionario como si se tiene en cuenta la variabilidad temporal (problema transitorio). En este caso particular, se supone que no se necesitan los desplazamientos que se puedan producir por cambios de presiones intersticiales, porque son pequeños y no producen efectos relevantes. La rotura no drenada del terreno bajo una cimentación es un problema que se puede resolver sin necesidad del cálculo de las presiones intersticiales, siempre que se tomen parámetros resistentes de rotura no drenada (resistencia al corte sin drenaje). Es decir, que basta resolver las ecuaciones de equilibrio y el adecuado modelo constitutivo que puede ser elasticidad más plasticidad perfecta. Una vez se ha decidido qué procesos de van a resolver y las ecuaciones que los van a representar se puede pasar a analizar el dominio geométrico sobre el que se va a hacer. El dominio dónde se resuelven las ecuaciones es una idealización de la geometría real, por tanto, hay que partir de planos o mapas. El dominio se subdivide en materiales y además hay que aplicar condiciones iniciales y condiciones de contorno. Que el dominio se divida en materiales es una forma muy general de considerarlo y que se suele aplicar a sólidos, medio poroso entre otros casos. En este contexto, un material sería un terreno que tienen unas determinadas características hidráulica y/o mecánicas. En caso de incluir una zapata, podría ser considerada otro material y se le podrían asignar las propiedades del hormigón. Además de las propiedades de los materiales, sobre el dominio hay que aplicar condiciones iniciales y condiciones de contorno. Las condiciones iniciales son las presiones o niveles piezométricos en el problema hidráulico y las tensiones en el problema mecánico. Además pueden también ser condiciones iniciales la porosidad u otras variables llamadas de historia. En los apéndices se describen dos programas. En el Apéndice 1 se describe la utilización del programa PLAXIS. Este es un programa muy utilizado en geotecnia para la modelación de problemas geotécnicos reales. Originalmente fue desarrollado en Holanda para estudiar el comportamiento de los diques o presas para la contención del mar y los ríos y con los que se gana superficie habitable. Actualmente es un programa comercial muy aplicado a problemas geotécnicos en todo el mundo. En el Apéndice 2 se describe brevemente el programa de pre-y-post proceso GiD desarrollado en CIMNE que se usa para desarrollar modelos de cálculo con CODE_BRIGHT. Este último se ha desarrollado en el Departamento de Ingeniería del Terreno de la UPC.

9.5. REFERENCIAS CODE_BRIGHT http://www.etcg.upc.edu/recerca/webs/code_bright Oñate, E. Cálculo de Estructuras por el Método de Elementos Finitos, Análisis Elástico Lineal, Cimne, 1992. PLAXIS http://www.plaxis.nl/ Zienkiewicz O.C. and R. Taylor, The Finite Element Method, Fourth Edition (1987), McGraw Hill, Europe.

APENDICE I. DESCRIPCIÓN GENERAL DEL PROGRAMA PLAXIS
ASPECTOS GENERALES DE LA MODELACIÓ N (extraido del manual de PLAXIS programa por S.Olivella) Geometria: points, lines and clusters Suelo en capas / Objetos estructurales Etapas de construcción / Cargas Un modelo tiene que ser suficientemente grande como para que los contornos no influyan en el problema analizado. Puntos/Points:
Principio y final de lineas. Se usan tambien para localizar: anchors, point forces, point fixities
Lineas/Lines:
Contornos Capas de suelos Separación de etapas de construcción
Clusters:
Areas cerradas por lineas. Se reconocen solas al generar las lineas. Dentro del cluster, las propiedades del suelo son homgéneas. Dentro del cluster habrán elementos con las mismas propiedades.
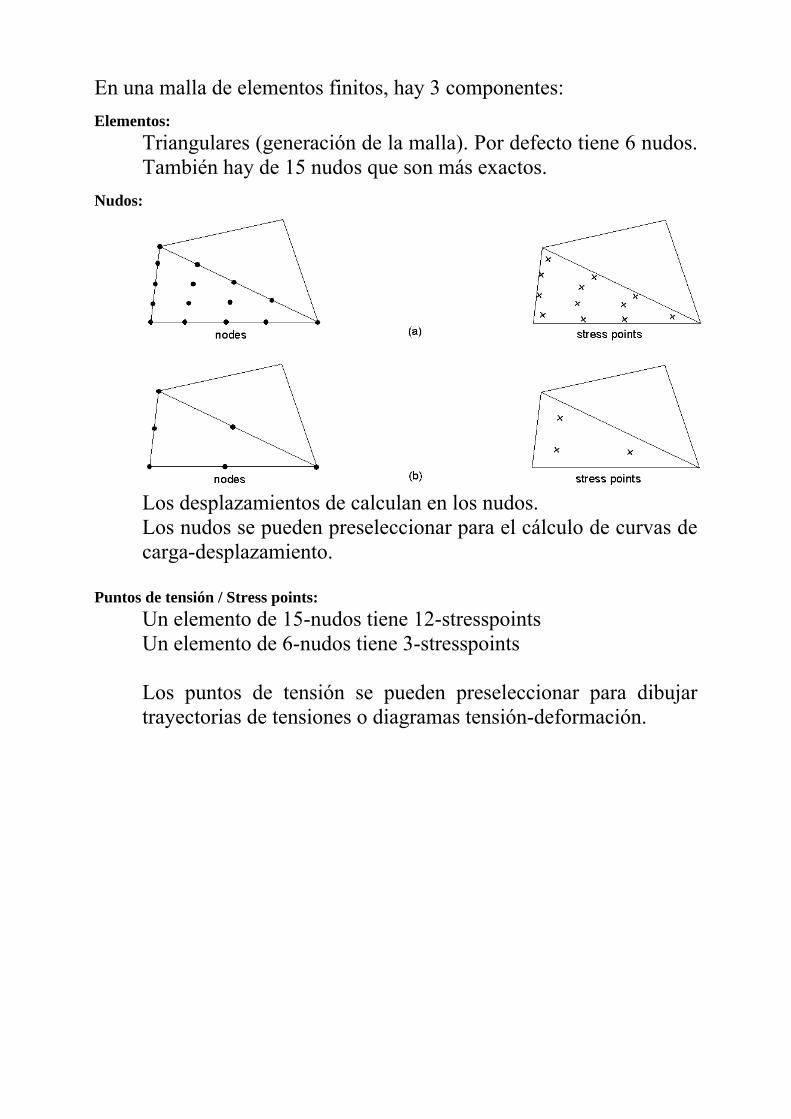
En una malla de elementos finitos, hay 3 componentes: Elementos:
Triangulares (generación de la malla). Por defecto tiene 6 nudos. También hay de 15 nudos que son más exactos.
Nudos:
Los desplazamientos de calculan en los nudos. Los nudos se pueden preseleccionar para el cálculo de curvas de carga-desplazamiento.
Puntos de tensión / Stress points:
Un elemento de 15-nudos tiene 12-stresspoints Un elemento de 6-nudos tiene 3-stresspoints Los puntos de tensión se pueden preseleccionar para dibujar trayectorias de tensiones o diagramas tensión-deformación.
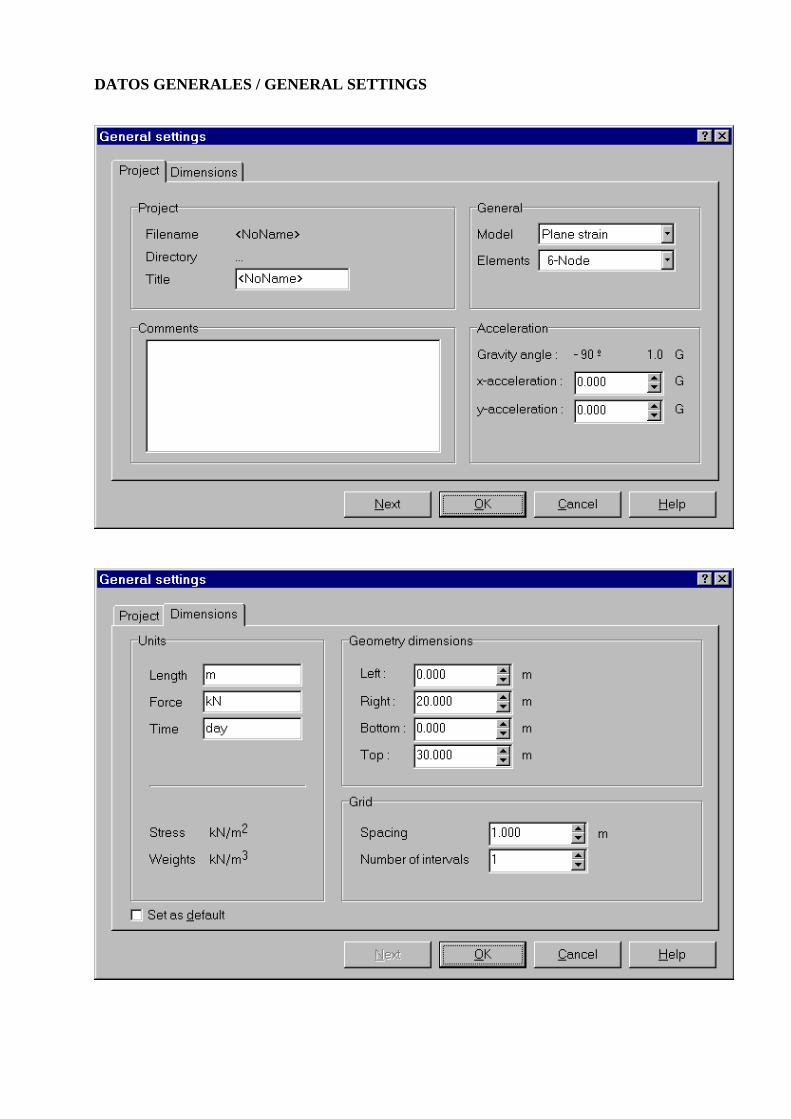
DATOS GENERALES / GENERAL SETTINGS
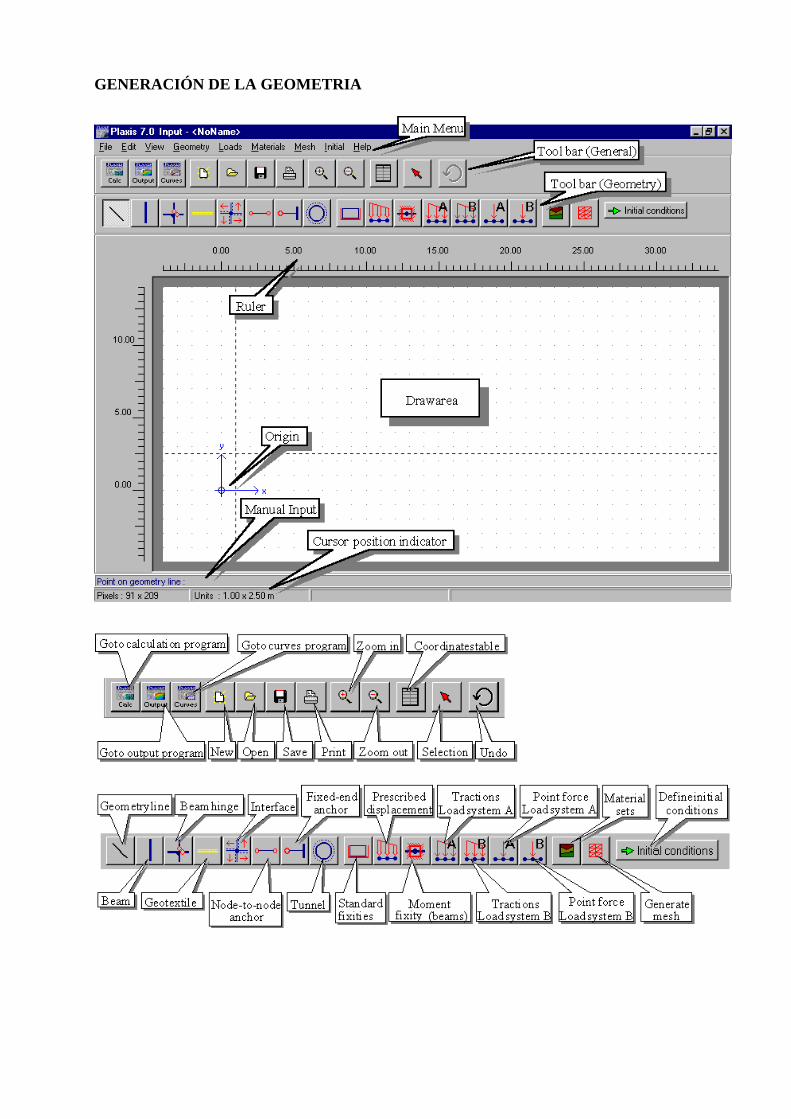
GENERACIÓN DE LA GEOMETRIA
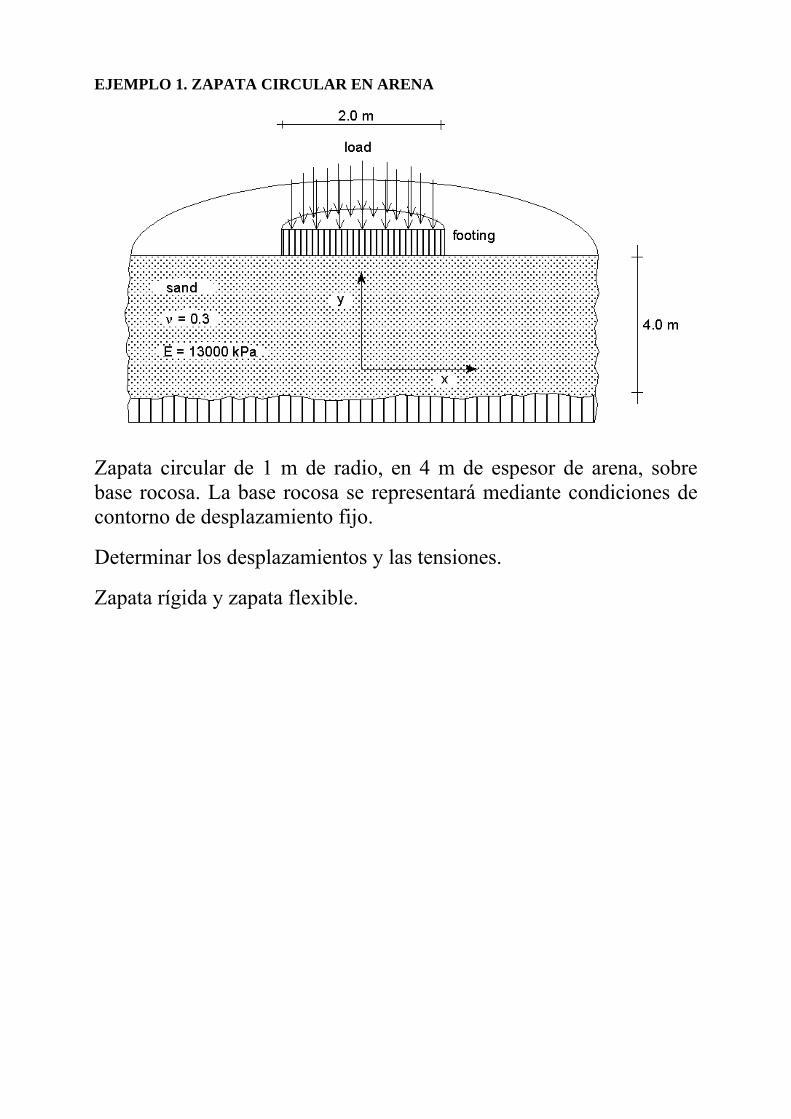
EJEMPLO 1. ZAPATA CIRCULAR EN ARENA
Zapata circular de 1 m de radio, en 4 m de espesor de arena, sobre base rocosa. La base rocosa se representará mediante condiciones de contorno de desplazamiento fijo.
Determinar los desplazamientos y las tensiones.
Zapata rígida y zapata flexible.
Zapata rígida
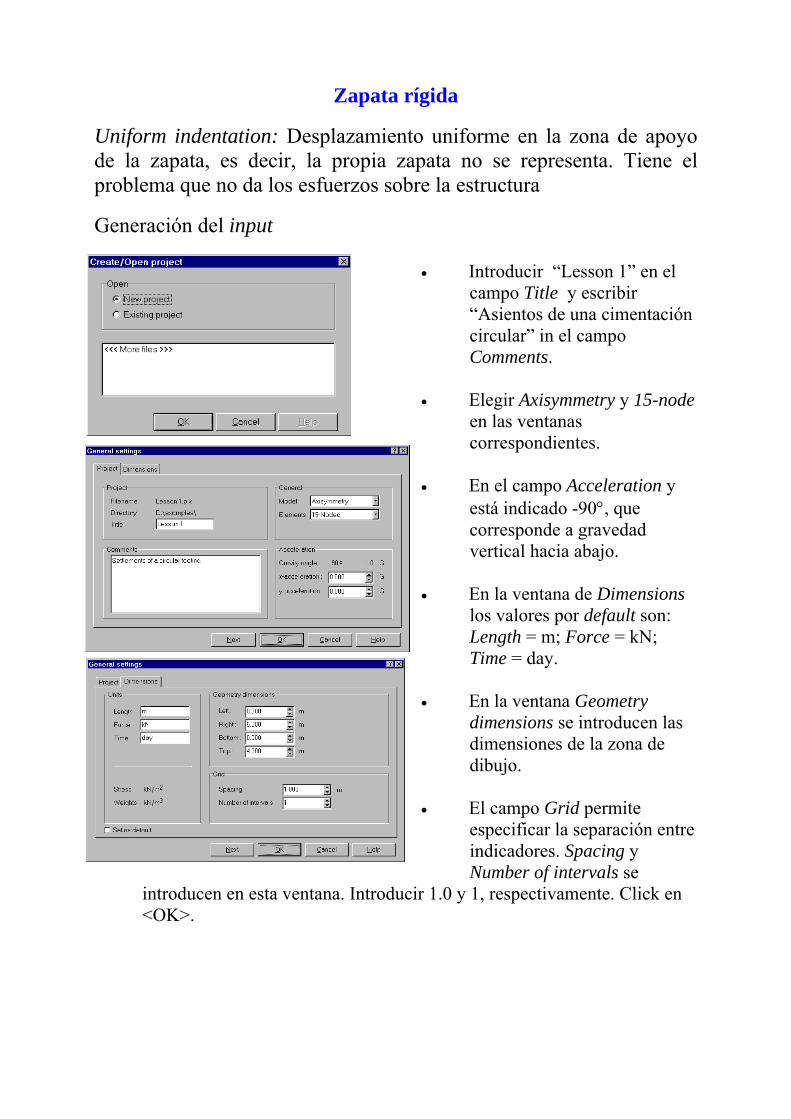
Uniform indentation: Desplazamiento uniforme en la zona de apoyo de la zapata, es decir, la propia zapata no se representa. Tiene el problema que no da los esfuerzos sobre la estructura
Generación del input
Introducir “Lesson 1” en el campo Title y escribir “Asientos de una cimentación circular” in el campo Comments.
Elegir Axisymmetry y 15-node
en las ventanas correspondientes.
En el campo Acceleration y
está indicado -90, que corresponde a gravedad vertical hacia abajo.
En la ventana de Dimensions
los valores por default son: Length = m; Force = kN; Time = day.
En la ventana Geometry
dimensions se introducen las dimensiones de la zona de dibujo.
El campo Grid permite
especificar la separación entre indicadores. Spacing y Number of intervals se
introducen en esta ventana. Introducir 1.0 y 1, respectivamente. Click en <OK>.
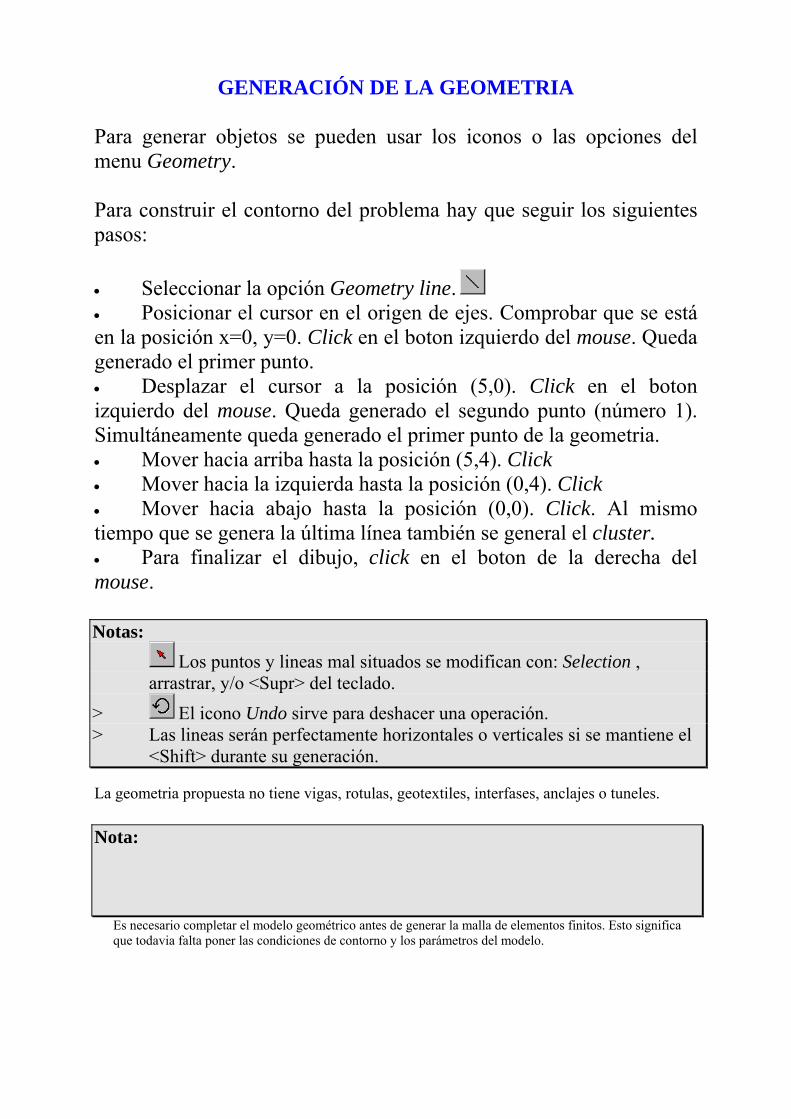
GENERACIÓN DE LA GEOMETRIA Para generar objetos se pueden usar los iconos o las opciones del menu Geometry. Para construir el contorno del problema hay que seguir los siguientes pasos:
Seleccionar la opción Geometry line. Posicionar el cursor en el origen de ejes. Comprobar que se está en la posición x=0, y=0. Click en el boton izquierdo del mouse. Queda generado el primer punto. Desplazar el cursor a la posición (5,0). Click en el boton izquierdo del mouse. Queda generado el segundo punto (número 1). Simultáneamente queda generado el primer punto de la geometria. Mover hacia arriba hasta la posición (5,4). Click Mover hacia la izquierda hasta la posición (0,4). Click Mover hacia abajo hasta la posición (0,0). Click. Al mismo tiempo que se genera la última línea también se general el cluster. Para finalizar el dibujo, click en el boton de la derecha del mouse.
La geometria propuesta no tiene vigas, rotulas, geotextiles, interfases, anclajes o tuneles.
Es necesario completar el modelo geométrico antes de generar la malla de elementos finitos. Esto significa que todavia falta poner las condiciones de contorno y los parámetros del modelo.
Notas:
Los puntos y lineas mal situados se modifican con: Selection , arrastrar, y/o <Supr> del teclado.
> El icono Undo sirve para deshacer una operación. > Las lineas serán perfectamente horizontales o verticales si se mantiene el
<Shift> durante su generación.
Nota:

CONDICIONES DE CONTORNO Se encuentran en el segundo bloque de iconos o bien en el menu Loads.
Para problemas mecánicos hay dos tipos de condiciones: desplazamientos prescritos y fuerzas (loads) prescritas.
Se supone que todos los contornos deben tener alguna condición en cada dirección. Cuando el usuario no pone ninguna, funciona la natural que consiste en fuerza = 0 y desplazamiento = libre (ejemplo: la superficie superior del terreno donde no está la cimentación).
Necesariamente algún punto de la geometria debe tener una condición, en caso contrario toda la geometria podria moverse como un sólido rígido.
La condición más simple es el desplazamiento nulo (fixitiy), pero también pueden imponerse desplazamientos no nulos.
En este problema se modela la zapata con un desplazamiento no nulo en todos los puntos bajo la misma.
Para poner condiciones de contorno al problema planteado hay que seguir los siguientes pasos:
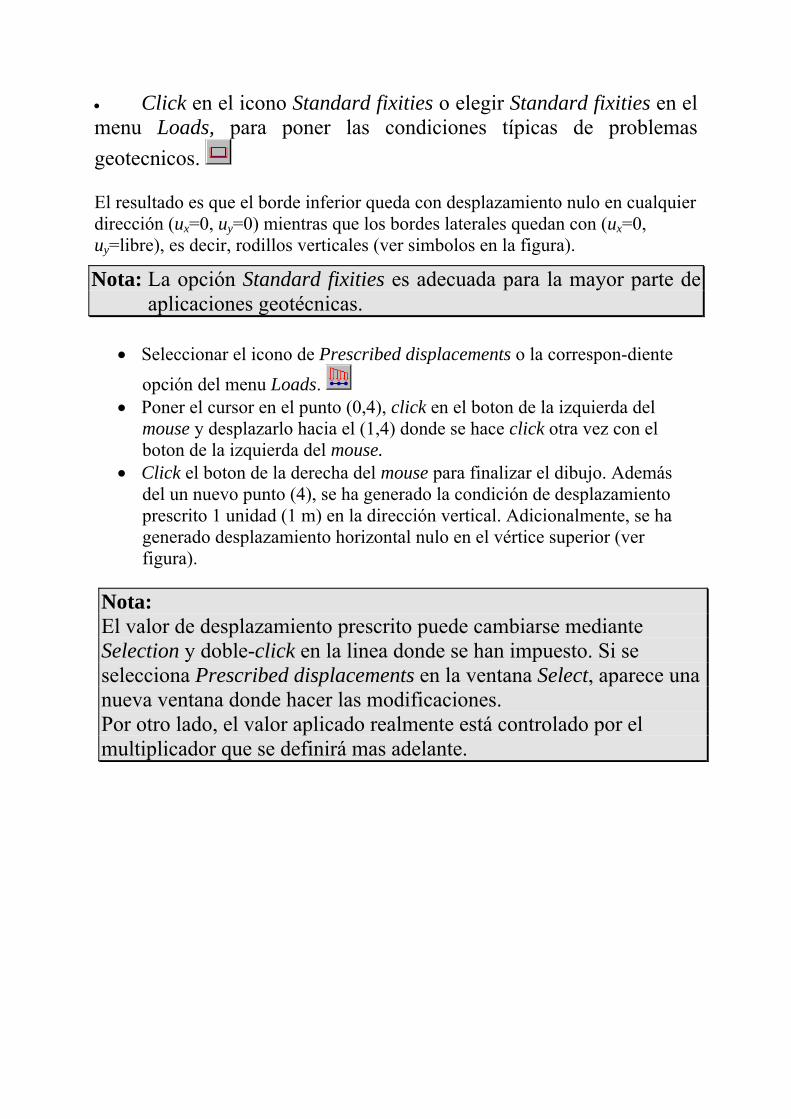
Click en el icono Standard fixities o elegir Standard fixities en el menu Loads, para poner las condiciones típicas de problemas
geotecnicos. El resultado es que el borde inferior queda con desplazamiento nulo en cualquier dirección (ux=0, uy=0) mientras que los bordes laterales quedan con (ux=0, uy=libre), es decir, rodillos verticales (ver simbolos en la figura).
Seleccionar el icono de Prescribed displacements o la correspon-diente
opción del menu Loads. Poner el cursor en el punto (0,4), click en el boton de la izquierda del
mouse y desplazarlo hacia el (1,4) donde se hace click otra vez con el boton de la izquierda del mouse.
Click el boton de la derecha del mouse para finalizar el dibujo. Además del un nuevo punto (4), se ha generado la condición de desplazamiento prescrito 1 unidad (1 m) en la dirección vertical. Adicionalmente, se ha generado desplazamiento horizontal nulo en el vértice superior (ver figura).
Nota: La opción Standard fixities es adecuada para la mayor parte de aplicaciones geotécnicas.
Nota: El valor de desplazamiento prescrito puede cambiarse mediante Selection y doble-click en la linea donde se han impuesto. Si se selecciona Prescribed displacements en la ventana Select, aparece una nueva ventana donde hacer las modificaciones. Por otro lado, el valor aplicado realmente está controlado por el multiplicador que se definirá mas adelante.
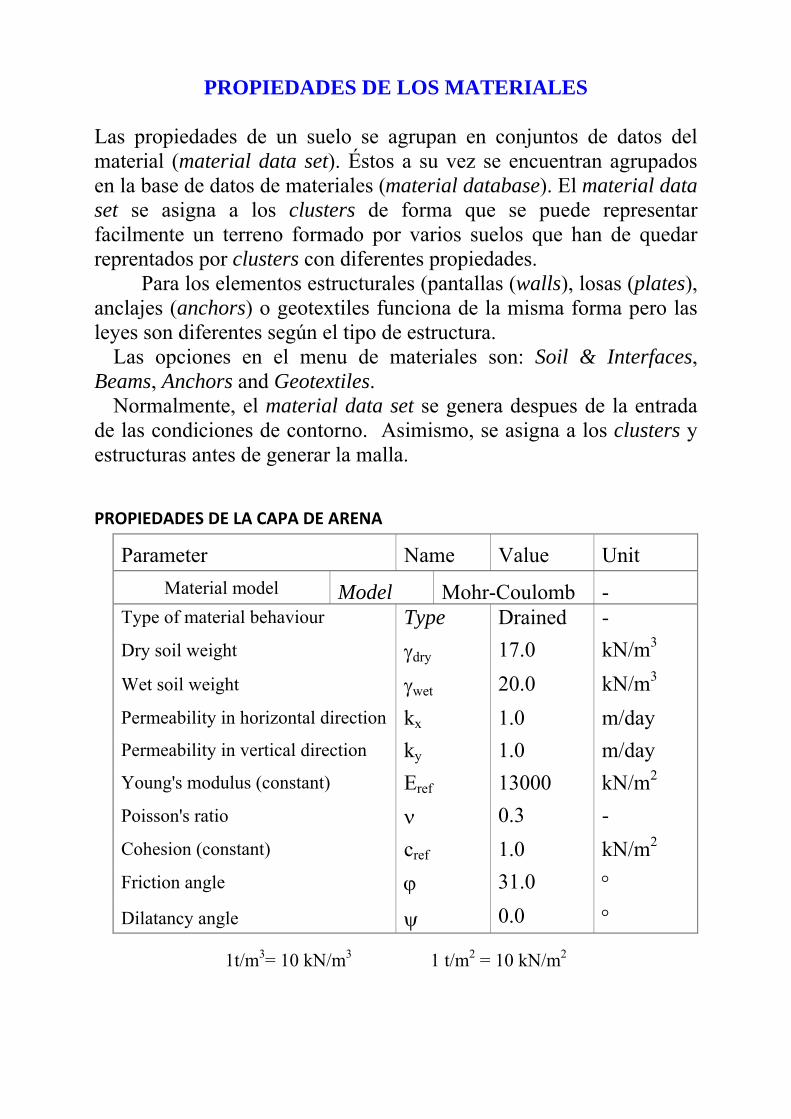
PROPIEDADES DE LOS MATERIALES Las propiedades de un suelo se agrupan en conjuntos de datos del material (material data set). Éstos a su vez se encuentran agrupados en la base de datos de materiales (material database). El material data set se asigna a los clusters de forma que se puede representar facilmente un terreno formado por varios suelos que han de quedar reprentados por clusters con diferentes propiedades. Para los elementos estructurales (pantallas (walls), losas (plates), anclajes (anchors) o geotextiles funciona de la misma forma pero las leyes son diferentes según el tipo de estructura.
Las opciones en el menu de materiales son: Soil & Interfaces, Beams, Anchors and Geotextiles.
Normalmente, el material data set se genera despues de la entrada de las condiciones de contorno. Asimismo, se asigna a los clusters y estructuras antes de generar la malla.
PROPIEDADES DE LA CAPA DE ARENA Parameter Name Value
Unit
Material model Model Mohr-Coulomb -
Type of material behaviour Type Drained - Dry soil weight dry 17.0 kN/m3 Wet soil weight wet 20.0 kN/m3 Permeability in horizontal direction kx 1.0 m/day Permeability in vertical direction ky 1.0 m/day Young's modulus (constant) Eref 13000 kN/m2 Poisson's ratio 0.3 - Cohesion (constant) cref 1.0 kN/m2 Friction angle 31.0 Dilatancy angle 0.0
1t/m3= 10 kN/m3 1 t/m2 = 10 kN/m2
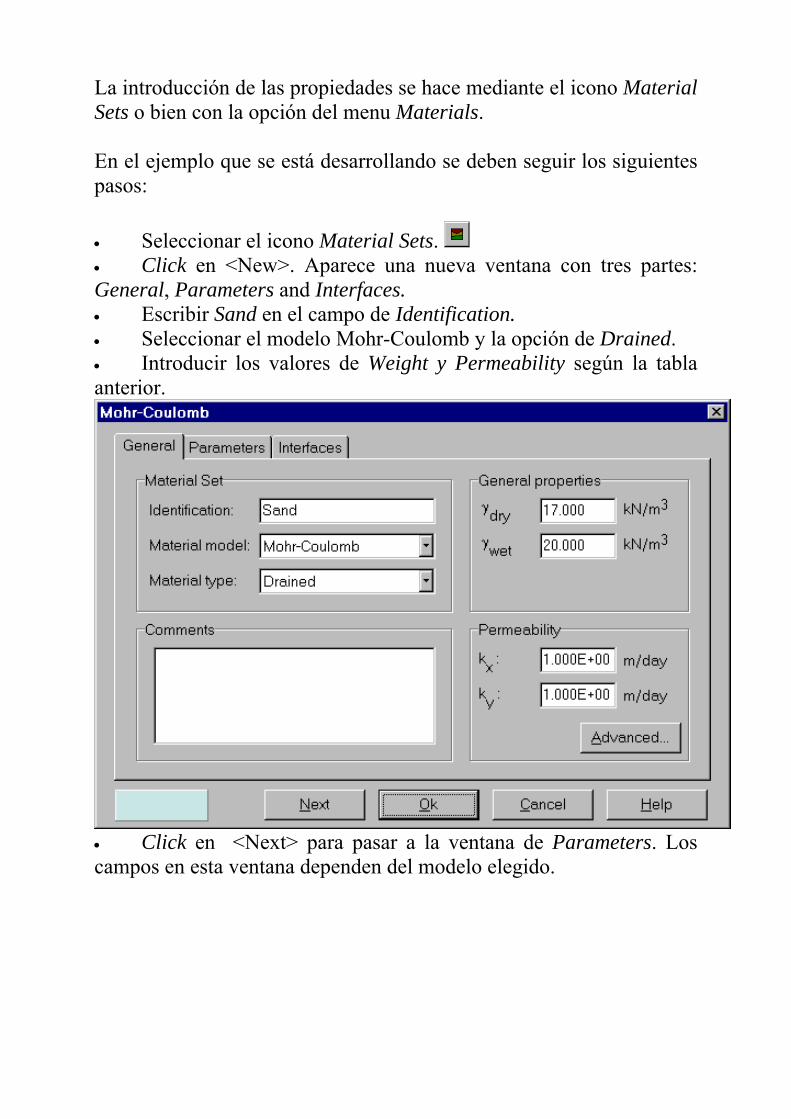
La introducción de las propiedades se hace mediante el icono Material Sets o bien con la opción del menu Materials. En el ejemplo que se está desarrollando se deben seguir los siguientes pasos:
Seleccionar el icono Material Sets. Click en <New>. Aparece una nueva ventana con tres partes: General, Parameters and Interfaces. Escribir Sand en el campo de Identification. Seleccionar el modelo Mohr-Coulomb y la opción de Drained. Introducir los valores de Weight y Permeability según la tabla anterior.
Click en <Next> para pasar a la ventana de Parameters. Los campos en esta ventana dependen del modelo elegido.
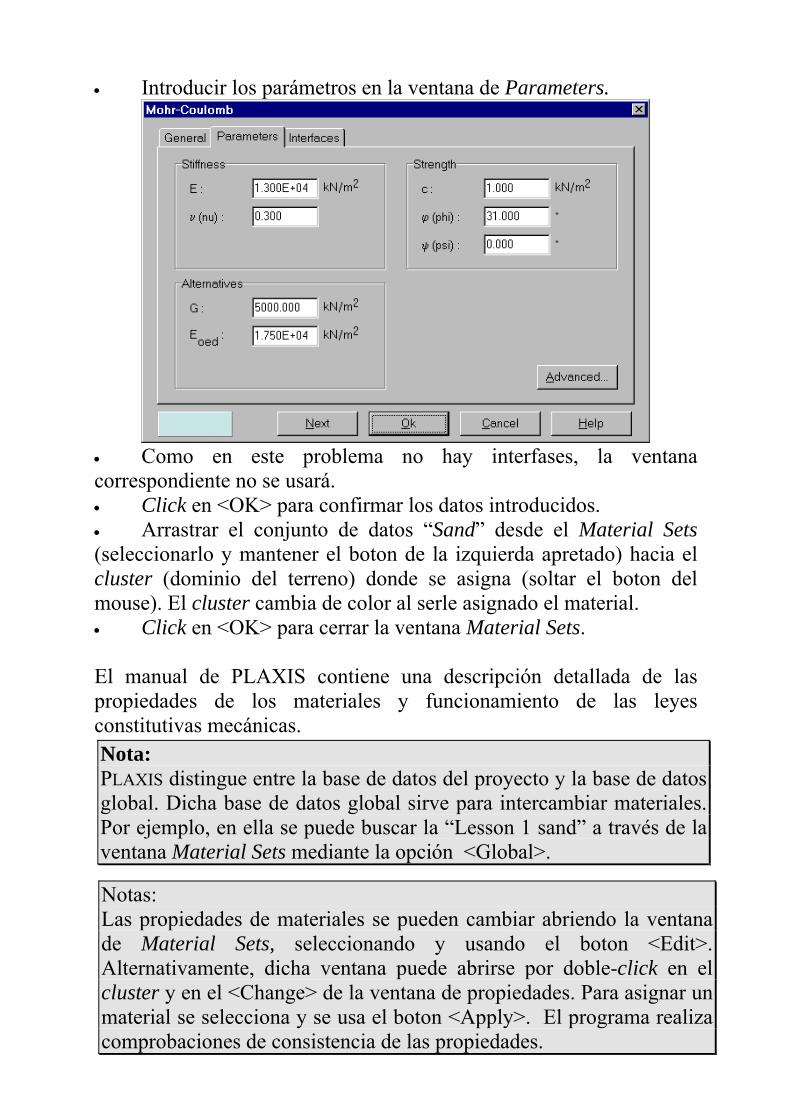
Introducir los parámetros en la ventana de Parameters.
Como en este problema no hay interfases, la ventana correspondiente no se usará. Click en <OK> para confirmar los datos introducidos. Arrastrar el conjunto de datos “Sand” desde el Material Sets (seleccionarlo y mantener el boton de la izquierda apretado) hacia el cluster (dominio del terreno) donde se asigna (soltar el boton del mouse). El cluster cambia de color al serle asignado el material. Click en <OK> para cerrar la ventana Material Sets. El manual de PLAXIS contiene una descripción detallada de las propiedades de los materiales y funcionamiento de las leyes constitutivas mecánicas. Nota: PLAXIS distingue entre la base de datos del proyecto y la base de datos global. Dicha base de datos global sirve para intercambiar materiales. Por ejemplo, en ella se puede buscar la “Lesson 1 sand” a través de la ventana Material Sets mediante la opción <Global>.
Notas: Las propiedades de materiales se pueden cambiar abriendo la ventana de Material Sets, seleccionando y usando el boton <Edit>. Alternativamente, dicha ventana puede abrirse por doble-click en el cluster y en el <Change> de la ventana de propiedades. Para asignar un material se selecciona y se usa el boton <Apply>. El programa realiza comprobaciones de consistencia de las propiedades.
GENERACIÓN DE LA MALLA DE ELEMENTOS FINITOS
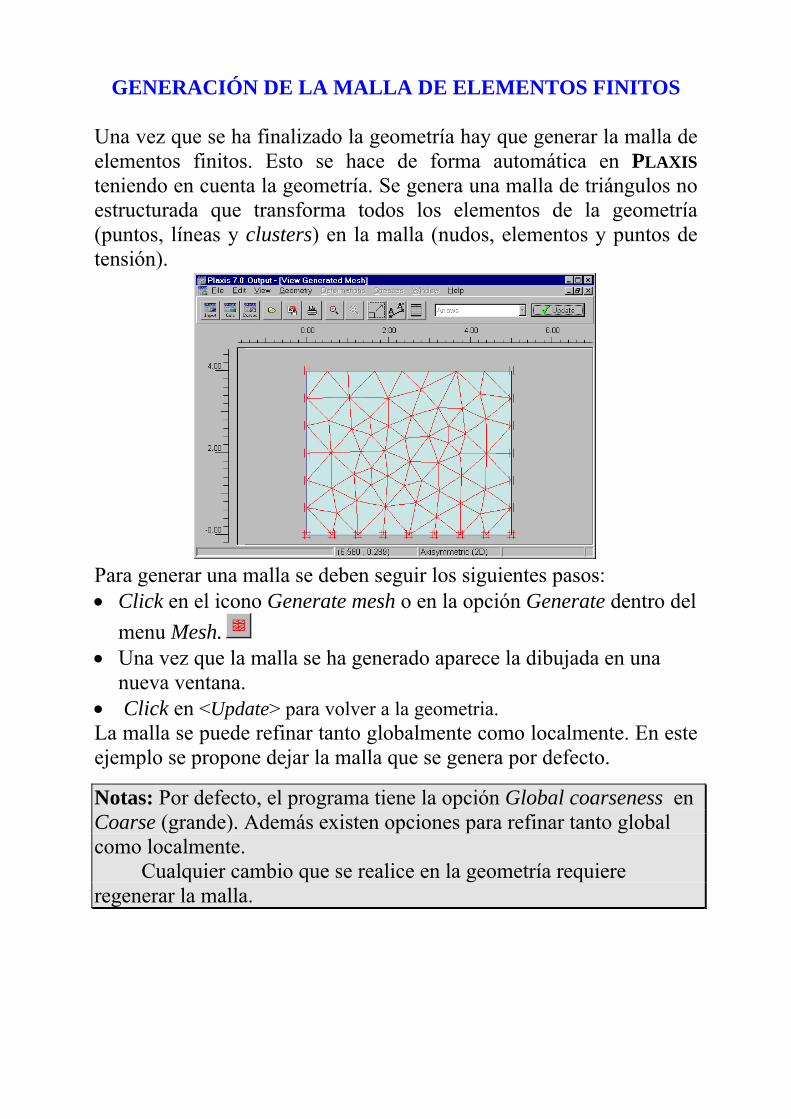
Una vez que se ha finalizado la geometría hay que generar la malla de elementos finitos. Esto se hace de forma automática en PLAXIS
teniendo en cuenta la geometría. Se genera una malla de triángulos no estructurada que transforma todos los elementos de la geometría (puntos, líneas y clusters) en la malla (nudos, elementos y puntos de tensión).
Para generar una malla se deben seguir los siguientes pasos: Click en el icono Generate mesh o en la opción Generate dentro del
menu Mesh. Una vez que la malla se ha generado aparece la dibujada en una
nueva ventana. Click en <Update> para volver a la geometria. La malla se puede refinar tanto globalmente como localmente. En este ejemplo se propone dejar la malla que se genera por defecto.
Notas: Por defecto, el programa tiene la opción Global coarseness en Coarse (grande). Además existen opciones para refinar tanto global como localmente. Cualquier cambio que se realice en la geometría requiere regenerar la malla.
CONDICIONES INICIALES
Una vez que se ha generado la malla y antes de iniciar los cálculos, hay que introducir las condiciones iniciales. Normalmente consisten en condiciones del agua subterránea, geometria inicial y estado inicial de tensiones efectivas. En este caso, no hay agua subterránea por encontrarse seca la arena pero si hay que generar las tensiones efectivas iniciales, para lo que se usará la opción de K0-procedure. Para introducir las condiciones iniciales hay que seguir los siguientes pasos:
Click en el icono o seleccionar a través del menu. Aparece una ventana que indica el peso específico del agua. Si se
confirma con <OK> se pasa al modo de agua subterránea. En el programa hay dos modos: water pressures y geometry
configuration. Como este problema no requiere presión de agua hay que pasar al geometry configuration mediante el botón de la derecha del interruptor:
Click en el icono de generación de tensiones (cruces rojas) o seleccionar en el menú Generate la opción de Initial stresses. En
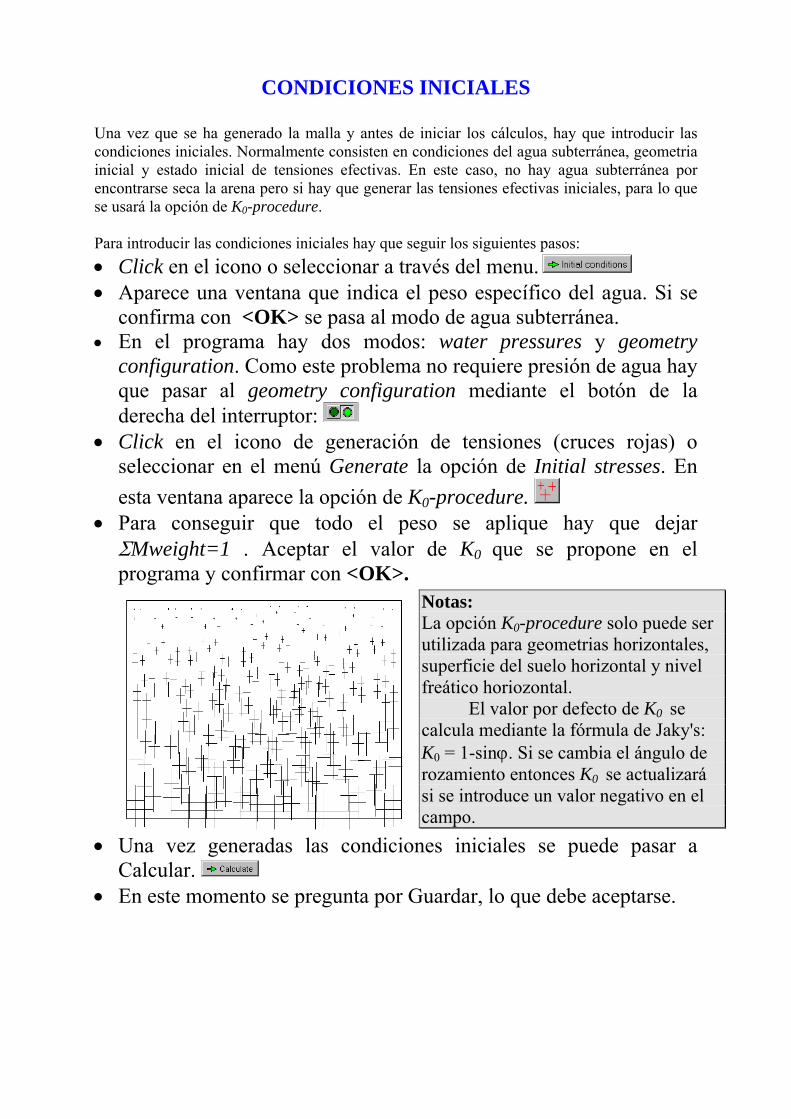
esta ventana aparece la opción de K0-procedure. Para conseguir que todo el peso se aplique hay que dejar
Mweight=1 . Aceptar el valor de K0 que se propone en el programa y confirmar con <OK>.
Una vez generadas las condiciones iniciales se puede pasar a Calcular.
En este momento se pregunta por Guardar, lo que debe aceptarse.
Notas: La opción K0-procedure solo puede ser utilizada para geometrias horizontales, superficie del suelo horizontal y nivel freático horiozontal. El valor por defecto de K0 se calcula mediante la fórmula de Jaky's: K0 = 1-sin. Si se cambia el ángulo de rozamiento entonces K0 se actualizará si se introduce un valor negativo en el campo.
CALCULO
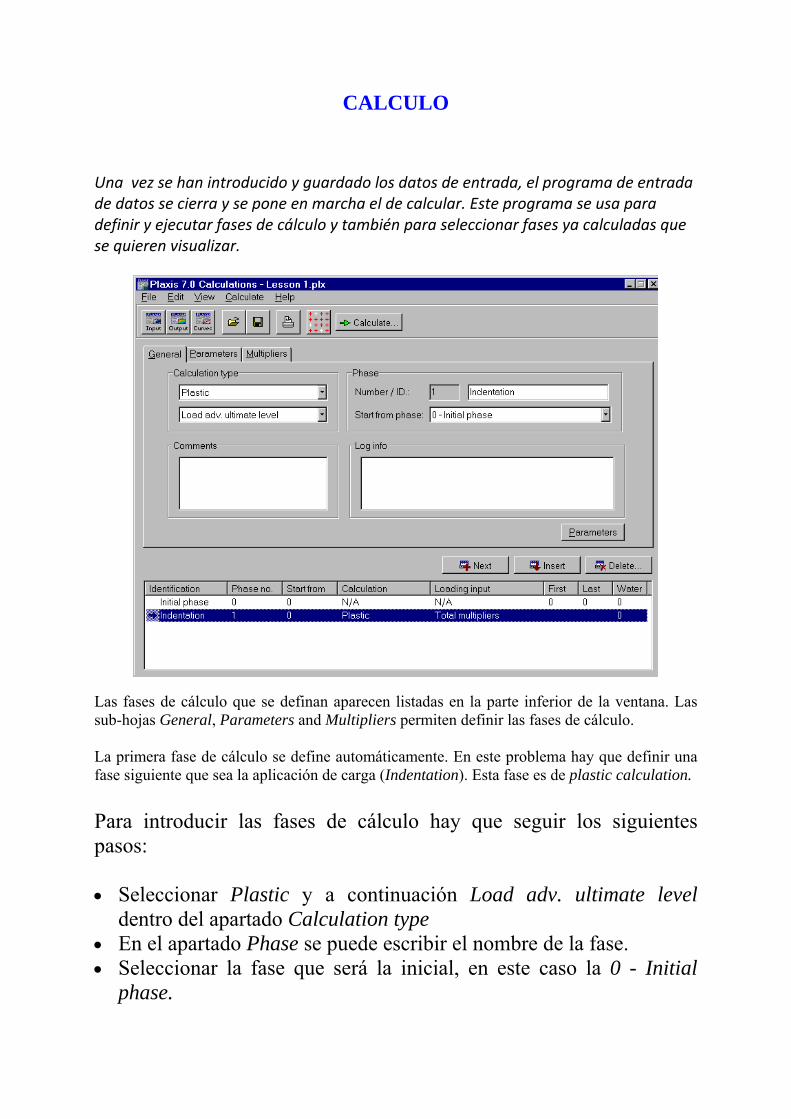
Una vez se han introducido y guardado los datos de entrada, el programa de entrada de datos se cierra y se pone en marcha el de calcular. Este programa se usa para definir y ejecutar fases de cálculo y también para seleccionar fases ya calculadas que se quieren visualizar.
Las fases de cálculo que se definan aparecen listadas en la parte inferior de la ventana. Las sub-hojas General, Parameters and Multipliers permiten definir las fases de cálculo. La primera fase de cálculo se define automáticamente. En este problema hay que definir una fase siguiente que sea la aplicación de carga (Indentation). Esta fase es de plastic calculation.
Para introducir las fases de cálculo hay que seguir los siguientes pasos: Seleccionar Plastic y a continuación Load adv. ultimate level
dentro del apartado Calculation type En el apartado Phase se puede escribir el nombre de la fase. Seleccionar la fase que será la inicial, en este caso la 0 - Initial
phase.
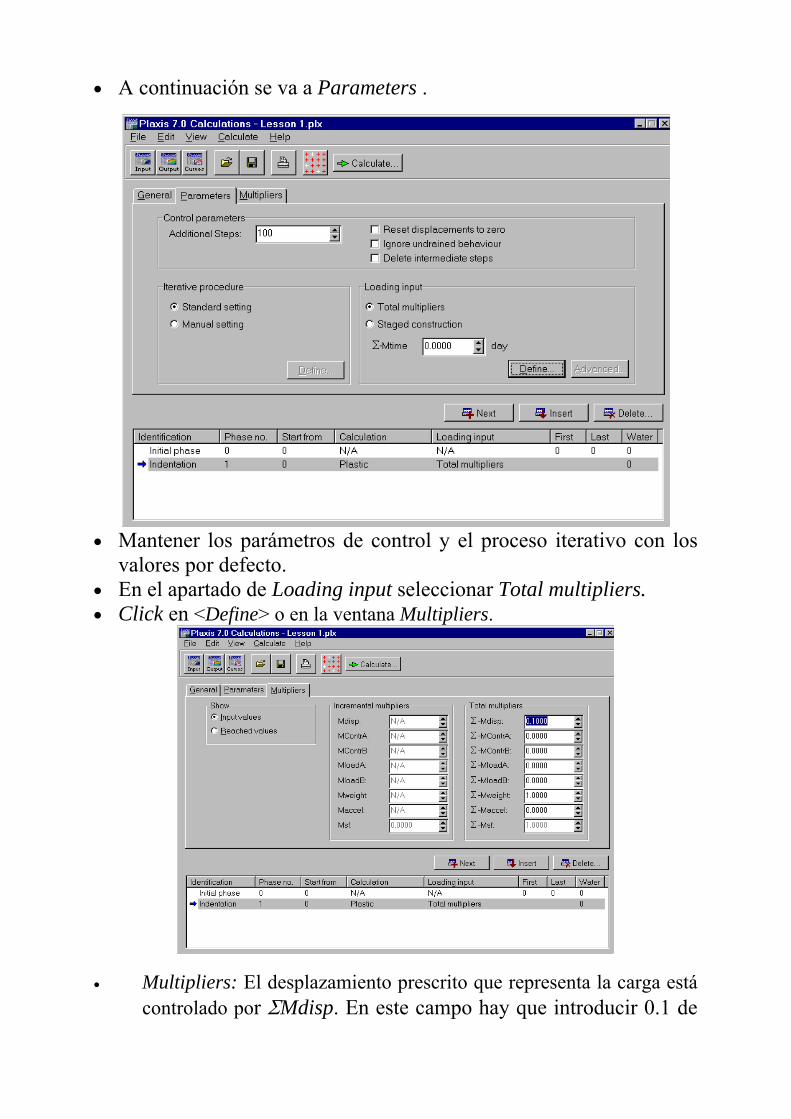
A continuación se va a Parameters .
Mantener los parámetros de control y el proceso iterativo con los valores por defecto.
En el apartado de Loading input seleccionar Total multipliers. Click en <Define> o en la ventana Multipliers.
Multipliers: El desplazamiento prescrito que representa la carga está controlado por Mdisp. En este campo hay que introducir 0.1 de
forma que como el valor de entrada original era 1.0, el desplazamiento realmente impuesto será: 1.0 x 0.1 = 0.1 m.
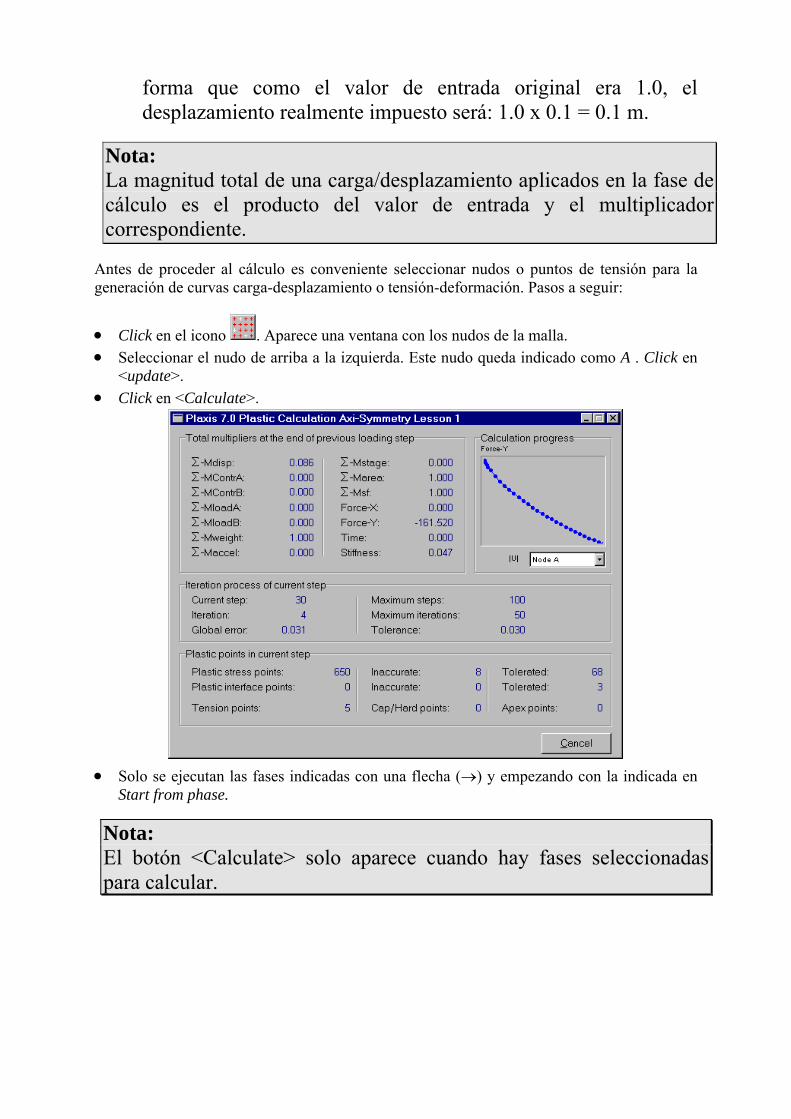
Antes de proceder al cálculo es conveniente seleccionar nudos o puntos de tensión para la generación de curvas carga-desplazamiento o tensión-deformación. Pasos a seguir:
Click en el icono . Aparece una ventana con los nudos de la malla. Seleccionar el nudo de arriba a la izquierda. Este nudo queda indicado como A . Click en
<update>.
Click en <Calculate>.
Solo se ejecutan las fases indicadas con una flecha () y empezando con la indicada en
Start from phase.
Nota: La magnitud total de una carga/desplazamiento aplicados en la fase de cálculo es el producto del valor de entrada y el multiplicador correspondiente.
Nota: El botón <Calculate> solo aparece cuando hay fases seleccionadas para calcular.
INGENIERIA GEOTECNICA Tema 9. Modelación Durante el cálculo, una ventana da información del progreso. La información de actualiza continuamente y muestra: curva carga-desplazamiento, magnitud de los multiplicadores, progreso del proceso iterativo (número de iteraciones, error global, puntos en régimen plástico). Cuando el cálculo termina, se actualiza la lista de fases y aparece un mensaje de finalización y si ésta ha sido correcta.
Para comprobar los valores alcanzados de los multiplicadores se puede mirar en Reached values dentro de la sub-ventana Multipliers. Para el caso estudiado, hay que tomar el valor de Force-Y que es la carga aplicada en la cimentación rígida para conseguir el desplazamiento impuesto. Como este problema es axisimétrico hay que multiplicar por 2 al valor de la ventana. El resultado es del orden de 1100 kN. Esta fuerza significa una tensión de 1100 kN/(π12)=350 kPa = 35 t/m2. Este valor es la presión de hundimiento de la cimentación (rígida).
Notas: Se pueden añadir, insertar o borrar nuevas fases de cálculo mediante las opciones <Next>, <Insert> y <Delete>.
Si una fase se ha calculado correctamente aparece con una marca verde (), sino una marca roja ().
Las fases seleccionadas para cálculo aparecen con una flecha azul ().
<Output> o <Calculate> aparecen dependiendo de que se haya terminado el cálculo o este todavía pendiente.

INGENIERIA GEOTECNICA Tema 9. Modelación Analíticamente podría estimarse como (aunque no es el caso de zapata rígida):
1'
2h c c q qp c N s qN s B N s
siendo:
2 2 31exp tg + exp tg31 45 + 6.6 3.12 20.6tg tg
4 2 2
1 20.6 1= 32.6
tg tg31
= 2 1 tg 2 20.6 1 tg31 25.9
q
qc
q
= N
NN
+ + N N
y los factores de forma:
11 tg 1 tg 31 1.6
120.6 1
= 1+ 1 1.63 32.6 1
= 1 0 4 0.6
q
qc
c
B= + s
LBN
sLNB
.sL
que si se substituye en Brinch Hansen da lugar a:
2
1'
21 32.6 1.63 0.5 2 17 25.9 0.6
53.1 264.2 317 kN/m
h c c q qp c N s qN s B N s
_____________________________
INGENIERIA GEOTECNICA Tema 9. Modelación
CALCULOS ALTERNATIVOS AL EJEMPLO
- Deformación plana en lugar de axisimetria - Refinar la malla usando elementos de orden superior - Cálculo en condiciones sin drenaje: = 0, c = cu = 100
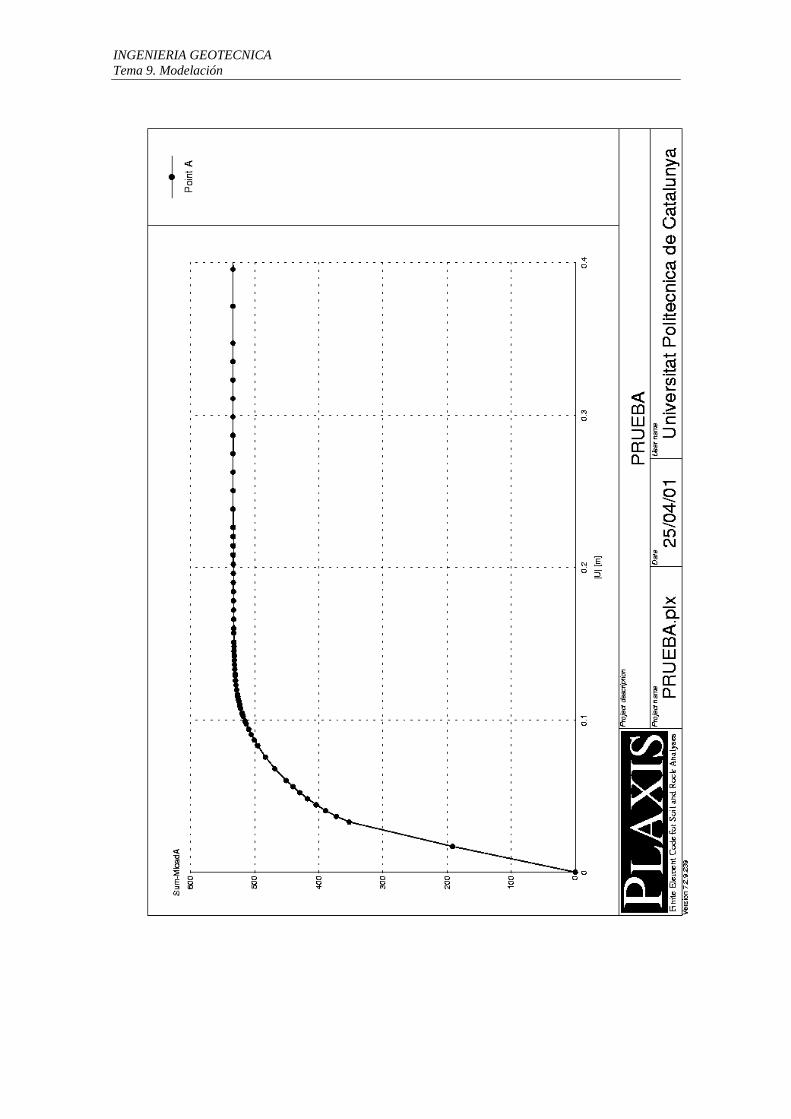
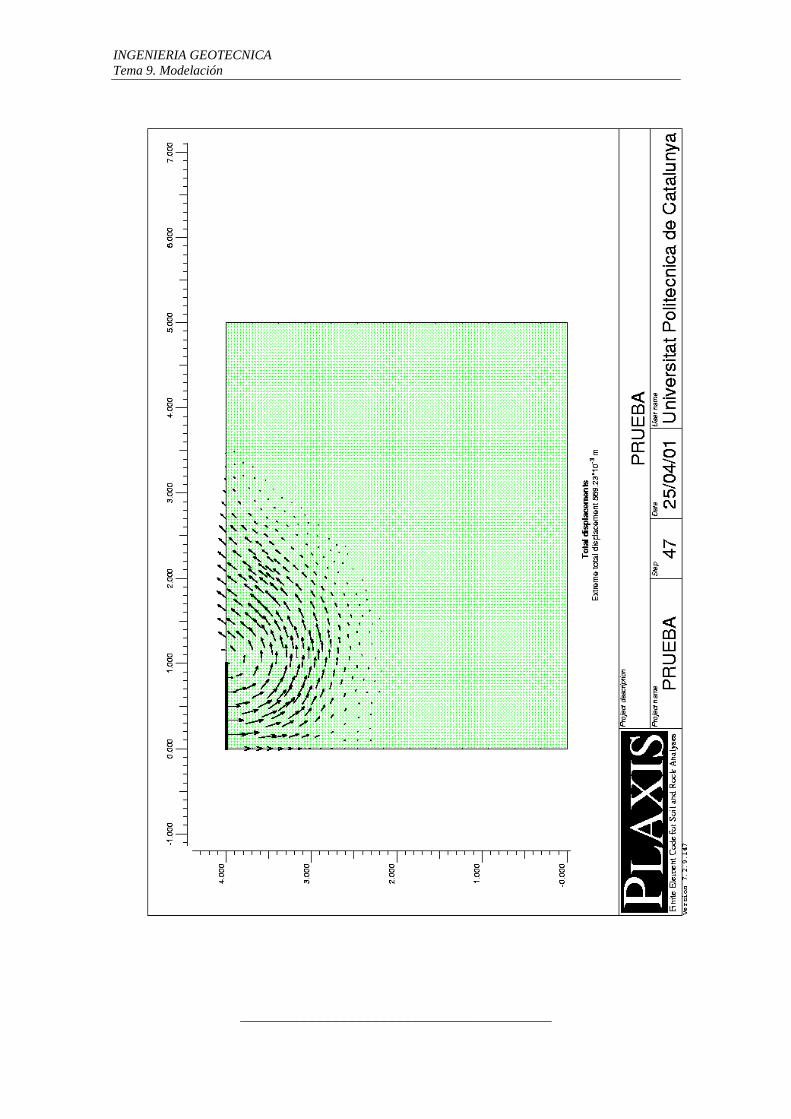
kN/m2 y = 0.48. Intentar obtener el 5.14 cu en condiciones de deformación plana. Dibujar Fuerza-Desplazamiento.
- Introducir una barra para simular la cimentación flexible
INGENIERIA GEOTECNICA Tema 9. Modelación
INGENIERIA GEOTECNICA Tema 9. Modelación
_______________________________________

INGENIERIA GEOTECNICA Tema 9. Modelación
APENDICE 2 DESCRIPCIÓN DE CODE_BRIGHT Y GID
INGENIERIA GEOTECNICA Tema 9. Modelación En este apéndice se explica brevemente que es GiD, sus peculiaridades respecto a otro tipo de aplicaciones, el concepto de pre y postprocesador, y la filosofía general del programa, predispuesta a la personalización por el usuario para sus necesidades en el ámbito de la simulación numérica. Se explican brevemente algunos conceptos acerca de los datos manipulados por el programa CODE_BRIGHT (en el entorno GiD): materiales, condiciones, intervalos y datos generales. 1. DEFINICIÓN GiD es un programa gráfico, destinado a la definición y preparación de los datos destinados a realizar una simulación numérica, así como a la visualización de sus resultados. La creación de los datos implica la definición de la geometría a estudiar, los materiales que la componen, las condiciones de contorno, fuerzas aplicadas, y otros parámetros, como por ejemplo la estrategia de resolución. El programa se encarga de crear una malla (para elementos finitos, diferencias finitas u otros métodos) y transferirle los datos asociados a la geometría. El postproceso consiste en la visualización de los resultados de modo que sean fácilmente interpretables. Pueden hacerse visualizaciones por colores, curvas de nivel, etiquetas, vectores, gráficas, animaciones, etc. Una característica esencial de GiD es que no está especializado en un tipo de análisis, a priori GiD no conoce ningún material o condición, hasta que no se carga un tipo de problema. En este trabajo el tipo de problema utilizado es el “Code_Bright_v3”. Este código esta especializado en problemas mecánicos, hidráulicos y térmicos en los medios geológicos. Cualquier usuario puede crear su “tipo de problema” particular, de modo que GiD conozca la sintaxis de su programa de simulación particular.
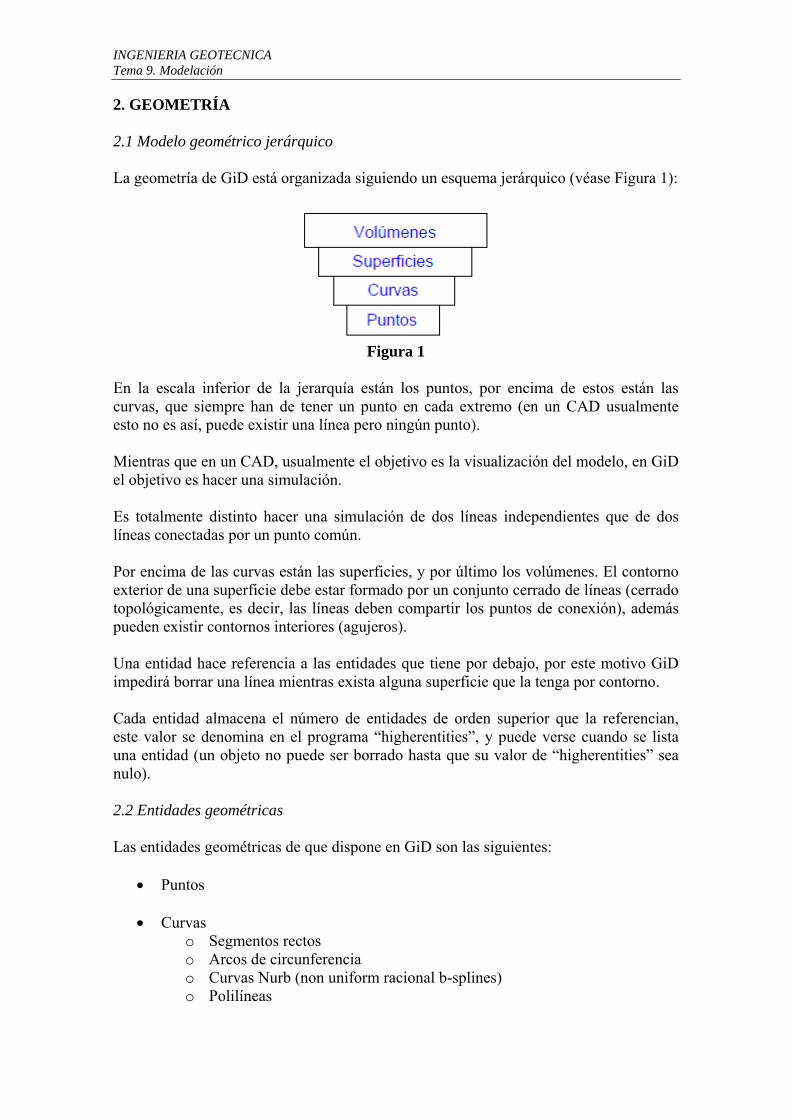
INGENIERIA GEOTECNICA Tema 9. Modelación 2. GEOMETRÍA 2.1 Modelo geométrico jerárquico La geometría de GiD está organizada siguiendo un esquema jerárquico (véase Figura 1):
Figura 1
En la escala inferior de la jerarquía están los puntos, por encima de estos están las curvas, que siempre han de tener un punto en cada extremo (en un CAD usualmente esto no es así, puede existir una línea pero ningún punto). Mientras que en un CAD, usualmente el objetivo es la visualización del modelo, en GiD el objetivo es hacer una simulación. Es totalmente distinto hacer una simulación de dos líneas independientes que de dos líneas conectadas por un punto común. Por encima de las curvas están las superficies, y por último los volúmenes. El contorno exterior de una superficie debe estar formado por un conjunto cerrado de líneas (cerrado topológicamente, es decir, las líneas deben compartir los puntos de conexión), además pueden existir contornos interiores (agujeros). Una entidad hace referencia a las entidades que tiene por debajo, por este motivo GiD impedirá borrar una línea mientras exista alguna superficie que la tenga por contorno. Cada entidad almacena el número de entidades de orden superior que la referencian, este valor se denomina en el programa “higherentities”, y puede verse cuando se lista una entidad (un objeto no puede ser borrado hasta que su valor de “higherentities” sea nulo). 2.2 Entidades geométricas Las entidades geométricas de que dispone en GiD son las siguientes:
Puntos Curvas
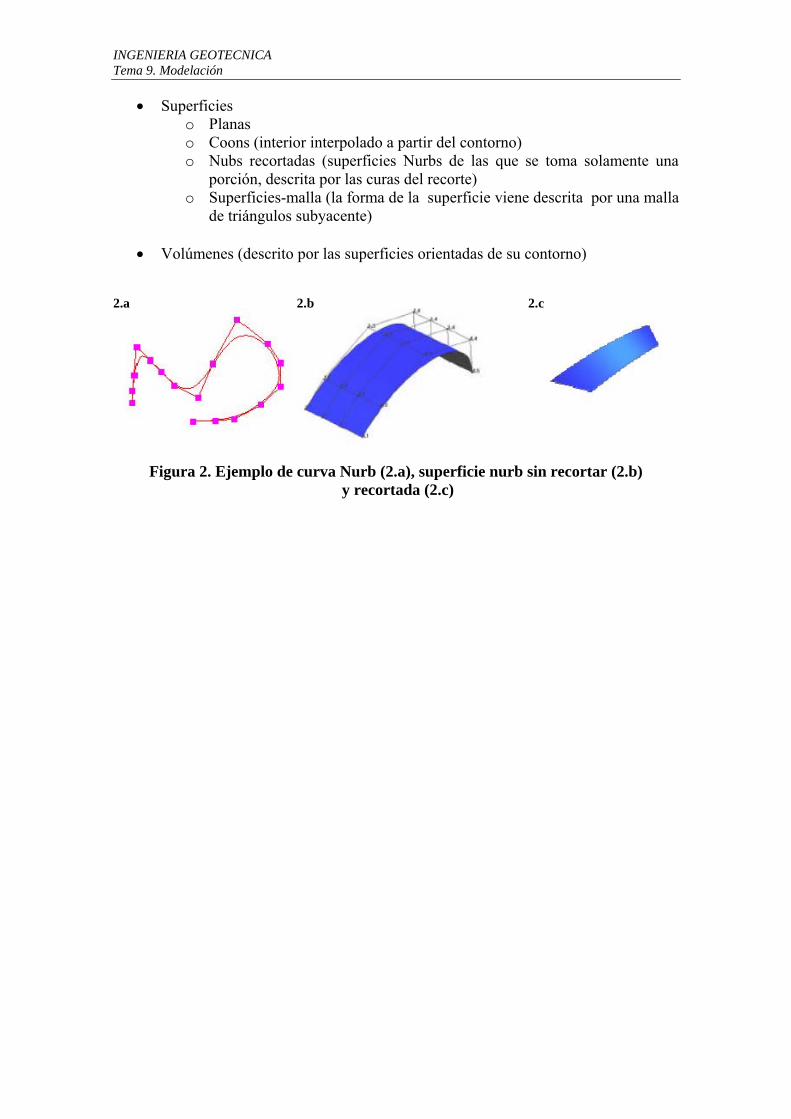
o Segmentos rectos o Arcos de circunferencia o Curvas Nurb (non uniform racional b-splines) o Polilíneas
INGENIERIA GEOTECNICA Tema 9. Modelación
Superficies o Planas o Coons (interior interpolado a partir del contorno) o Nubs recortadas (superficies Nurbs de las que se toma solamente una
porción, descrita por las curas del recorte) o Superficies-malla (la forma de la superficie viene descrita por una malla
de triángulos subyacente)
Volúmenes (descrito por las superficies orientadas de su contorno)
Figura 2. Ejemplo de curva Nurb (2.a), superficie nurb sin recortar (2.b)
y recortada (2.c)
2.a 2.b 2.c

INGENIERIA GEOTECNICA Tema 9. Modelación 3. DATOS A INTRODUCIR PARA CODE_BRIGHT CODE_BRIGHT es un programa de cálculo por elementos finitos desarrollado en el Departamento de Ingeniería del Terreno de la UPC. Aquí se incluye una breve descripción de las ventanas que aparecen en GiD cuando se activa CODE_BRIGHT dentro de la opción “problemtypes”. 3.1 Materiales El concepto de GiD material está naturalmente relacionado con el concepto físico del material que compone un objeto. Una entidad de GiD sólo puede tener como máximo un material asociado, a diferencia de lo que pasa con las condiciones. Los materiales, actualmente pueden asignarse a líneas, superficies, volúmenes o directamente a los elementos de la malla. Hasta que no se carga un “tipo de problema”, no hay disponible ningún material. Dicho tipo de problema describe en un fichero *.mat los campos que lo describen. Por ejemplo, para un cálculo elástico lineal se requieren campos para el módulo elástico, coeficiente de Poisson y la densidad, mientras que para un cálculo térmico estos campos no tienen sentido y se requiere en cambio la conductividad térmica del material.
Figura 3. Ejemplo de ventana de asignación de material
Tipo de problema: CODE_BRIGHT Se puede crear un nuevo material derivado de otro, del que hereda los campos, a los que se les pueden dar nuevos valores. 3.2 Condiciones
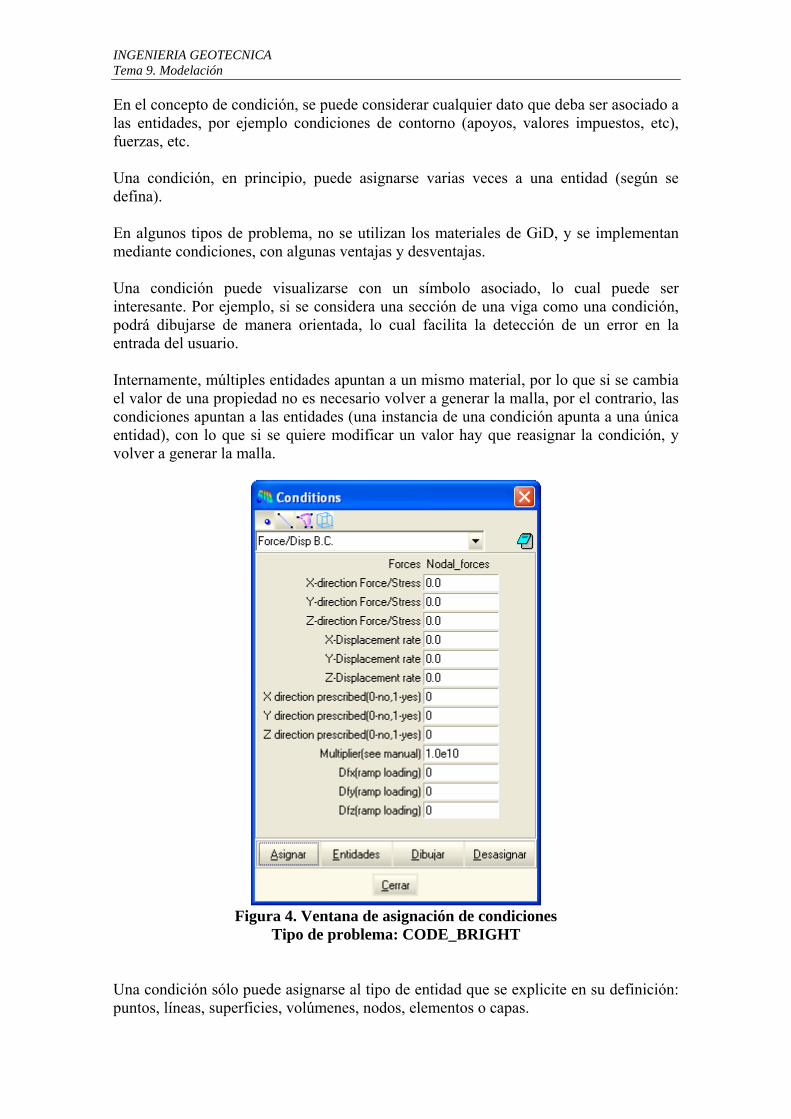
INGENIERIA GEOTECNICA Tema 9. Modelación En el concepto de condición, se puede considerar cualquier dato que deba ser asociado a las entidades, por ejemplo condiciones de contorno (apoyos, valores impuestos, etc), fuerzas, etc. Una condición, en principio, puede asignarse varias veces a una entidad (según se defina). En algunos tipos de problema, no se utilizan los materiales de GiD, y se implementan mediante condiciones, con algunas ventajas y desventajas. Una condición puede visualizarse con un símbolo asociado, lo cual puede ser interesante. Por ejemplo, si se considera una sección de una viga como una condición, podrá dibujarse de manera orientada, lo cual facilita la detección de un error en la entrada del usuario. Internamente, múltiples entidades apuntan a un mismo material, por lo que si se cambia el valor de una propiedad no es necesario volver a generar la malla, por el contrario, las condiciones apuntan a las entidades (una instancia de una condición apunta a una única entidad), con lo que si se quiere modificar un valor hay que reasignar la condición, y volver a generar la malla.
Figura 4. Ventana de asignación de condiciones
Tipo de problema: CODE_BRIGHT
Una condición sólo puede asignarse al tipo de entidad que se explicite en su definición: puntos, líneas, superficies, volúmenes, nodos, elementos o capas.
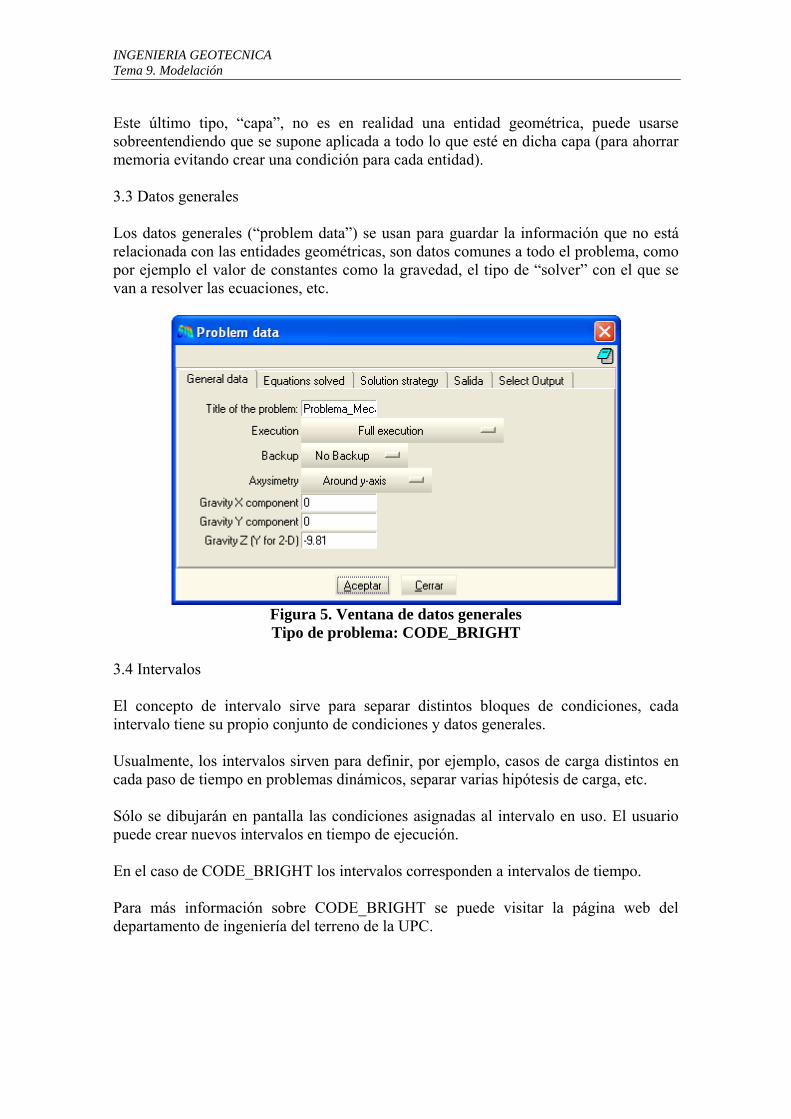
INGENIERIA GEOTECNICA Tema 9. Modelación Este último tipo, “capa”, no es en realidad una entidad geométrica, puede usarse sobreentendiendo que se supone aplicada a todo lo que esté en dicha capa (para ahorrar memoria evitando crear una condición para cada entidad). 3.3 Datos generales Los datos generales (“problem data”) se usan para guardar la información que no está relacionada con las entidades geométricas, son datos comunes a todo el problema, como por ejemplo el valor de constantes como la gravedad, el tipo de “solver” con el que se van a resolver las ecuaciones, etc.
Figura 5. Ventana de datos generales Tipo de problema: CODE_BRIGHT
3.4 Intervalos El concepto de intervalo sirve para separar distintos bloques de condiciones, cada intervalo tiene su propio conjunto de condiciones y datos generales. Usualmente, los intervalos sirven para definir, por ejemplo, casos de carga distintos en cada paso de tiempo en problemas dinámicos, separar varias hipótesis de carga, etc. Sólo se dibujarán en pantalla las condiciones asignadas al intervalo en uso. El usuario puede crear nuevos intervalos en tiempo de ejecución. En el caso de CODE_BRIGHT los intervalos corresponden a intervalos de tiempo.
Para más información sobre CODE_BRIGHT se puede visitar la página web del departamento de ingeniería del terreno de la UPC.