tema 4: sistemas de posicionamiento en exteriores · tema 4 sistemas de posicionamiento en...
TRANSCRIPT

Tema 4: Sistemas de
Posicionamiento en Exteriores
Dr. Antonio R. Jiménez RuizInstituto de Automática Industrial (CSIC)
E-mail: [email protected]
Curso: Sistemas de Localización y Posicionamiento
Máster Oficial en Sistemas Electrónicos Avanzados. Sistemas Inteligentes.
Departamento de Electrónica. Universidad de Alcalá.Curso 2007/2008
2Tema 4 Sistemas de Posicionamiento en Exteriores
Tabla de contenidos
1. Introducción Histórica
2. Aplicaciones del GPS
3. Los segmentos del GPS
4. Principio de funcionamiento del GPS
5. Las señales: Generación y recepción
6. Las fuentes de error en GPS
7. Métodos de mejora de la precisión en GPS
8. Otras soluciones GNSS
9. Aspectos Prácticos
Referencias

3Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica
1.1 Preguntas
1.2 La edad de piedra
1.3 La era de las estrellas
1.4 La era de la radio
1.5 La era de LORAN
1.6 La era de los satélites
4Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.1 Preguntas
Preguntas tan antiguas como la historia de la mente• ¿Dónde estoy?• ¿Dónde quiero ir?• ¿Cómo llegar a mi destino?
Quién:– Poblaciones nómadas– Animales migratorios– Navegantes, Turistas– Robots, AGV’s,…
Localización y Desplazamiento están íntimamente relacionadas
Localización Desplazamiento
Respuesta al problema de localización:• Diferente en función de la época
Planteamientos conjuntos

5Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.2 La edad de piedra
Puntos de referencia, que tenían que identificar y recordar:• Piedras naturales o piedras colocadas a propósito
• Árboles marcados o pintados
• Montañas altas y especialmente sus crestas
6Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.3 La era de las estrellas (1/2)
La exploración de los océanos. Únicas referencias visibles:• El Sol
• La Luna
• Las estrellas
Navegación mar adentro en viajes cortos: Manteniendo el rumbo respecto a una o varias referencias
Analizando la disposición geométrica de estrellas que dependia de la ubicación del observador
Es el nacimiento de la Navegación Celeste

7Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.3 La era de las estrellas (2/2)
Se inventaron instrumentos ópticos especiales:• Miden ángulos entre las estrellas y el horizonte
• Con tablas pre-calculadas se averigua la posición por triangulación
• P.ej.: Octantes (Quintantes, Sextantes) y Teodolitos
Inconvenientes de Octantes:• Solo latitud (norte-sur) + cronómetro (longitud)
• No muy preciso (error > varios kilómetros)
• Cálculos tediosos y lentos con cartas naveg.• No válido durante el día o noches con nubes
Conclusiones:• Necesidad de:
• Automático, preciso, rápido,operativo 24 h
• Idea: • Medir distancias automát. en vez de ángulos
• Nace la Localización por Radio
8Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.4 La era de la radio (1/2)
Medida de Distancia:• Medir tiempo que tarda una señal de radio en viajar de una estación
emisora a otra receptora: TOF (Time of Flight)• Multiplicar por la velocidad de propagación de la señal de radio
(300.000 km/segundo), obtenemos la distancia
Precisión en determinar TOF crítica:• Error de 1 microsegundo en TOF => error de 300 metros• Si precisión de 0.3 metros => limitar error en TOF a 1 nanosegundo
Medida de la posición usando receptor de radio: • 1 estación transmisora A => Posición en cualquier lugar de una
circunferencia
9Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.4 La era de la radio (2/2)
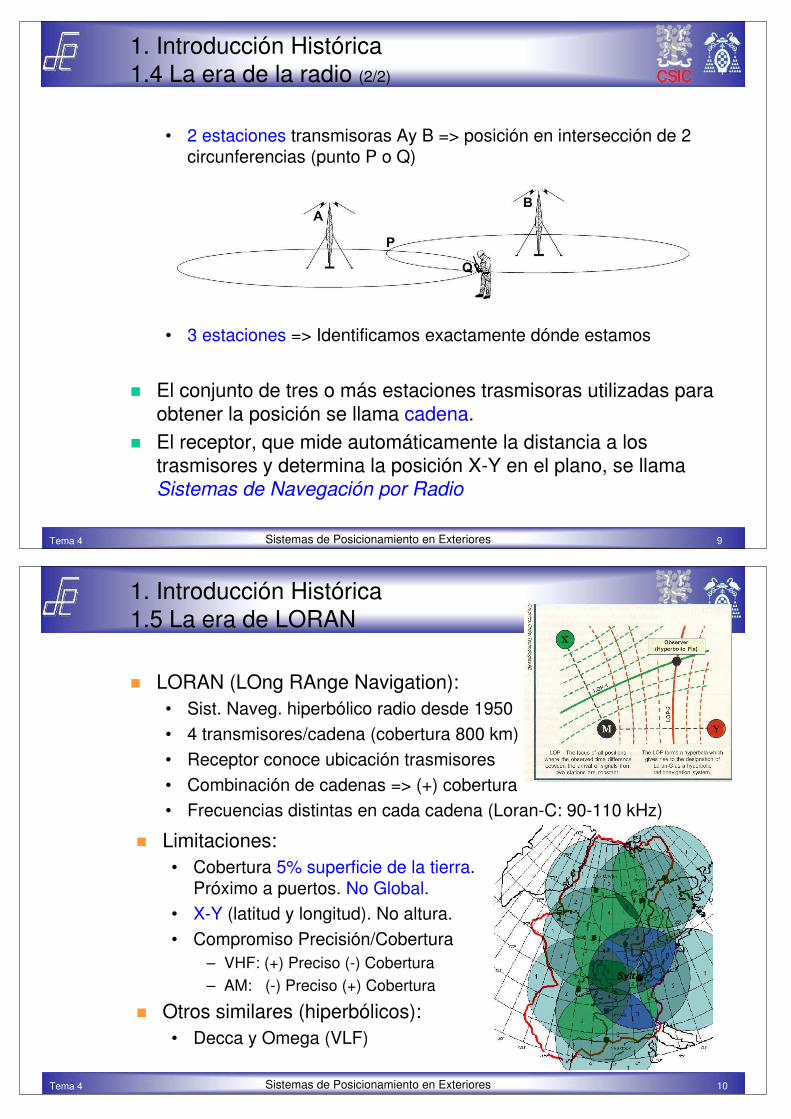
• 2 estaciones transmisoras Ay B => posición en intersección de 2 circunferencias (punto P o Q)
• 3 estaciones => Identificamos exactamente dónde estamos
El conjunto de tres o más estaciones trasmisoras utilizadas para obtener la posición se llama cadena.
El receptor, que mide automáticamente la distancia a lostrasmisores y determina la posición X-Y en el plano, se llama Sistemas de Navegación por Radio
10Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.5 La era de LORAN
LORAN (LOng RAnge Navigation):• Sist. Naveg. hiperbólico radio desde 1950
• 4 transmisores/cadena (cobertura 800 km)
• Receptor conoce ubicación trasmisores
• Combinación de cadenas => (+) cobertura• Frecuencias distintas en cada cadena (Loran-C: 90-110 kHz)
Limitaciones:• Cobertura 5% superficie de la tierra.
Próximo a puertos. No Global.• X-Y (latitud y longitud). No altura.
• Compromiso Precisión/Cobertura– VHF: (+) Preciso (-) Cobertura
– AM: (-) Preciso (+) Cobertura
Otros similares (hiperbólicos):• Decca y Omega (VLF)

11Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.6 La era de los satélites (1/2)
Idea:• Emitir desde el espacio las señales de radio (alta frecuencia)• Colocando varios satélites-trasmisores orbitando sobre la tierra• Cada satélite cubriendo amplias regiones de la Tierra
Desafio: • Medir posición cambiante de los satélites en órbita con precisión
• Atenuar fuentes de error (atmosféricas, doppler, relativistas,…)
• Medir los tiempos absolutos de vuelo entre satélite/receptor
Ventajas:• Aumentar la cobertura
=> cubrir toda la Tierra => Sistema GLOBAL
• Se mide XYZ (latitud, longitud y altitud)
12Tema 4 Sistemas de Posicionamiento en Exteriores
1. Introducción Histórica1.6 La era de los satélites (2/2)
GNSS (Global Navigation Satellite System) desarrollados:• Transit / Tsikada (años 60-70)• GLONASS (URSS)
• NavStar GPS (USA)
• Galileo (Europa) (siglo XXI)
GNSS vs Navegación Celeste:• “Hemos vuelto a mirar al cielo
pero ahora, en vez de a
estrellas, a objetos hechos por
el hombre”
años 80-90

13Tema 4 Sistemas de Posicionamiento en Exteriores
Tabla de contenidos
1. Introducción Histórica
2. Aplicaciones del GPS
3. Principio de funcionamiento del GPS
4. Los segmentos del GPS
5. Las señales: Generación y recepción
6. Las fuentes de error en GPS
7. Métodos de mejora de la precisión en GPS
8. Otras soluciones GNSS
9. Aspectos Prácticos
Referencias
14Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS
Introducción
2.1. Navegación marítima
2.2. Navegación Aérea
2.3. Navegación Terrestre
2.4. Levantamiento de Mapas
2.5. Usos Militares
2.6. Usos recreativos
2.7. Otras aplicaciones

15Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPSIntroducción
Ambos desarrollados para aplicaciones de navegación Durante su invención no se veía todo el enorme potencial de
aplicaciones que se podían cubrir
Analogía
Cronómetro
tiempo
GPS
posición
Amplio espectro de aplicaciones
Tendencia a seguir aumentando
16Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.1. Navegación Marítima
Navegación en alta mar Atraque en puertos y navegación por canales ECDIS (Electronic Charting Display) Medir la velocidad (p.ej. enganches red, veleros de competición) Monitorización de rutas de barcos desde estación central Detección posición de icebergs y su comunicación a los barcos Navegación próxima a fronteras internacionales

17Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.2. Navegación Aérea
Vuelos transoceánicos: Ineciales + Omega GPS. Supervisión de las posiciones de los aviones en pantalla en una
estación de control o en el propio avión: Evitar Colisiones Aproximación y entrada en pista a aeropuertos: GPS diferencial
+ pseudolitos
18Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.3. Navegación Terrestre
Ayudas a la navegación de coches (por carreteras y ciudades localizando el coche sobre un plano digital)
Guiado automático de vehículos (circuitos de prueba)
Control de flotas de vehículos (coches alquiler, taxis,
camiones, ambulancias, bomberos).
• Salvar vidas humanas seleccionando el vehículo de apoyo más próximo
• Mantenimiento horarios autobuses urbanos
Expediciones a lugares inexplorados

19Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.4. Levantamiento de Mapas (Surveying)
Indicación de posiciones de interés (georeferencias, construcciones, recogida materiales, ubicación yacimientos, mantenimiento,...)
Mapas de carreteras (moviendo receptor a lo largo de las vías)
Agricultura de precisión (aplicación selectiva de fertilizantes y pesticidas y estudio mediante GIS; guiado avionetas en tratamientos)
Fotogrametría aérea (determinando posición, orientación y escala usando referencias sobre el terreno)
Mapas terrestres (combinando fotos captadas desde posiciones conocidas)
20Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.5. Usos Militares y Espaciales
Guiado de misiles / aviones
Avance y orientación de tropas en condiciones adversas (con poca visibilidad: tormentas del desierto, niebla; o en sitios desconocidos y sin referencias visuales)
Lanzamiento y puesta en órbita de satélites / estaciones espaciales

21Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.5. Usos Recreativos
Marchas y rutas a pie o bicicleta (seguimiento, creación de las rutas e intercambio)
Yates deportivos (navegación de gente inexperta)
Golf• Determinación de distancias al green o
al hoyo• Movimiento de carros de caddie
siguiendo al golfista
Visitas autoguiadas• En parques de la naturaleza y ciudades
monumentales
• Dando información al usuario al aproximarse a puntos de interés no visitados
22Tema 4 Sistemas de Posicionamiento en Exteriores
2. Aplicaciones del GPS2.6. Otras Aplicaciones
Estudio de poblaciones de animales (ciclos migratorios, comportamientos animales salvajes en peligro,...)
Ayuda a la orientación de personas ciegas (indicando con voz sintetizada por que calle y número de una ciudad se encuentra,...)
Diseminación de tiempos
Análisis de las señales GPS para medir parámetros atmosféricos

23Tema 4 Sistemas de Posicionamiento en Exteriores
Tabla de contenidos
1. Introducción Histórica
2. Aplicaciones del GPS
3. Los segmentos del GPS
4. Principio de funcionamiento del GPS
5. Las señales: Generación y recepción
6. Las fuentes de error en GPS
7. Métodos de mejora de la precisión en GPS
8. Otras soluciones GNSS
9. Aspectos Prácticos
Referencias
24Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los segmentos del GPS
Introducción
3.1. Segmento de Espacio
3.2. Segmento de Control
3.3. Segmento de Usuario

25Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPSIntroducción
El sistema GPS se puede dividir en tres segmentos:• Segmento espacio: 24 satélites orbitando • Segmento de usuario: Los receptores de mano o embarcados• Segmento de control: 5 estaciones de control de satélites
26Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.1. El Segmento Espacio (1/5)
24 Satélites orbitando circularmente a:• 20.200 km de la superficie
• 26.560 km del centro de masa (e<0.01)
6 Órbitas con 4 satélites cada una• Espaciadas 60º sobre ecuador• Inclinadas 55º respecto plano ecuatorial
Tiempo de órbita: 11h:58’ Se ven 5-8 satélites a la vez casi
siempre desde cualquier sitio de la Tierra 4 Relojes Atómicos por satélite:
• Atraso de 1 seg. X 1 millón años

27Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.1. El Segmento Espacio (2/5)
Proyección de las órbitas en un plano
Planos orbitales inclinados 55º
Orbitas separadas 60º
28Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.1. El Segmento Espacio (3/5)
Rastro de los satélites sobre el globo

29Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.1. El Segmento Espacio (4/5)
Tipos de Satélites:• Block I:
– Satélites prototipo para validar el concepto de GPS
• Block II/IIA:– Mejora protecciones rayos cósmicos (afectaban a RAM)– Se añadieron por seguridad SA y AS
Satélite Block IIDelta IILanzado
7.5 añosVida
2 Cesio + 2 rubidioRelojes
1783.74 MHzRecibe
1575.42+1227.60 MHzTransmite
4 km/sVelocidad
5.1 metrosTamaño
930 kg (en órbita)Peso
• Block IIR/IIF:– AutoNav: Comunicación entre satélites para mantener su
efemérides y reloj durante 180 días. Mayor autonomía
30Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.1. El Segmento Espacio (5/5)
Fases de lanzamiento:• 10 satélites Block I desde 1978• 24 satélites Block II desde 1989
hasta 1994 (24 h. operativo)• Reposición
– [1997-2002]: Block IIR– [2003- ]:Block IIF
Renovación continua de satélites:

31Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.2. El Segmento de Control (1/2)
Consta de:• 5 estaciones fijas que monitorizan y siguen los satélites:
– 1) Oceano Pacifico (Hawai)– 2) Pacífico (Kwajalein) – 5) Estación central de la base aérea de Schriever/Falcon en Colorado Springs
• 4 Antenas para mandar información a los satélites
–3) Océano Indico (Diego García) –4) Océano Atlantico (Isla de Ascensión)
32Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.2. El Segmento de Control (2/2)
Modo de operación:• Se miden las señales L1,L2 de
cada uno de los satélites
• Se mandan todos los datos a la estación central, donde
– Se estiman la ubicaciones y órbitas de los satélites
– Se estiman errores de reloj
• Mediante las antenas (banda S) se envian:
– Efemétides
– Reloj– Parámetros de control por si
hay que reposicionar los satélites

33Tema 4 Sistemas de Posicionamiento en Exteriores
3. Los Segmentos del GPS3.3. El Segmento de Usuario (1/1)
Son los Receptores que:• Detectan, Decodifican y Procesan las señales L1
y L2 del GPS• Miden Posición, Velocidad, Tiempo
• Cuatro satélites son necesarios para medir
Características:• Dos Tipos de Servicios:
– SPS (Standard Positioning Service): Código C/A –Coarse/Clear Access
• Precisiones X-Y:100 m, Z:156 m (con SA)• Precisiones X-Y:25 m, Z:43 m (sin SA)
– PPS (Precise “ “ ): Código P(Y)-Precise/Protected
• Precisiones de X-Y:22 m, Z:27 m
• Capacidad precisión mejorada:– DGPS, INMARSAT, portadora, 2 frecuencias
• Interfases:– Gráficos con usuario, mapas, waypoints– Hardware con PC’s o sensores extra (inerciales)
34Tema 4 Sistemas de Posicionamiento en Exteriores
Tabla de contenidos
1. Introducción Histórica
2. Aplicaciones del GPS
3. Los segmentos del GPS
4. Principio de funcionamiento del GPS
5. Las señales: Generación y recepción
6. Las fuentes de error en GPS
7. Métodos de mejora de la precisión en GPS
8. Otras soluciones GNSS
9. Aspectos Prácticos
Referencias

35Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS
4.1. Trilateración
4.2. Sistemas de Referencia
4.3. Las órbitas y posición de los satélites
4.4. Determinando la Distancia: Pseudorango
4.5. Posición del Usuario usando Pseudorangos
4.6. Velocidad del Usuario
4.7. Transformación Coordenadas y Modelo de la Tierra
36Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.1. Trilateración (1/2)
Def.: “Método para medir posición a partir de distancias” Medimos distancia:
– Si sabemos que estamos a una distancia de un satélite j => podemos estar en cualquier punto de la superficie de la esfera
– Matemáticamente:
2222)()()( sjusjusjuj zzyyxxr −+−+−=
j
sjsjsjj
uuu
r
zyx
zyx
),,(
),,(
=
=
s
u
Rango entre usuario y satélite j
Vector de posición del satélite j
Vector de posición del usuario
jr
Incógnita
Conocido
Midiendo distancia a dos satélites:– Generamos la intersección de dos
esferas que cortan en general en una circunferencia (o perímetro de un círculo)

37Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.1. Trilateración (2/2)
Midiendo distancia a tres satélites:– La tercera esfera intersecta la circunferencia en dos puntos– Uno de esos dos puntos es la posición real del usuario
−+−+−=
++−=
++=
2
3
2
3
2
3
2
3
222
2
2
2
2222
1
)()()(
)()()(
)()()(
sususu
uusu
uuu
zzyyxxr
zyxxr
zyxr
−−±=
−++−=
+−=
222
1
3
3
2
3
2
3
2
3
2
1
2
2
2
2
2
2
1
2
2
2
uuu
s
usssu
s
su
zxry
z
xxzxrrz
x
xrrx
Planteando las tres ecuaciones de las esferas (ubicando los satélites en para simplificar el desarrollo) tenemos:
Cuya solución algebraica es
0,0,0,0,0 22111 ===== sssss zyzyx
Que como vemos tiene solución doble
Para un usuario en la superficie de la Tierra, la solución con una altura menor será la válida
Pero ¿Donde situamos el origen y el sistema de coordenadas?...
38Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.2. Sistemas de referencia (1/4)
Sistema ECEF (Earth-Centered Earth-Fixed) o Terrestre• Sistema solidario a la Tierra, con origen (0,0,0) en centro de masas• El eje Z pasa por el eje de rotación de la Tierra en “promedio” (CTP)
– Se hace así pues el eje de rotación (o polo) no es constante y se mueve unos 15 m realizando circulos => se usa un promedio (CTP-convetional Terrestial Pole)
• El plano ecuatorial es el normal al eje Z pasado por el centro de masas
• El eje X definido por interseción de plano ecuatorial y meridiano de referencia (Mean Greenwich Meridian)
• El Eje Y normal al X y Z (según regla mano derecha)• Muy adecuado para definir la posición del usuario y los satélites

39Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.2. Sistemas de referencia (2/4)
Sistema ECI (Earth-Centered Inertial) o Inercial• Necesario para formular el movimiento de satélites sobre la Tierra
expresando las fuerzas, aceleraciones, velocidades y posiciones– Las posiciones predichas en ECI se trasforman en ECEF para su uso en el GPS
mediante una transformación dependiente del tiempo (tres rotaciones)
• El origen está en el centro de masas de la Tierra (inercial en cortos periodos)
• El eje Z pasa por el eje de rotación “real” de la Tierra (CEP)• El eje X va del centro de masas por el plano ecuatorial al Equinocio Vernal*
* Dirección interseccion plano ecuatorial de la Tierra con plano de la órbita de la Tierra alrededor del Sol
• Pero: – Plano ecuatorial se mueve =>
Equinocio Vernal también => eje X tiene derivas
• Solución:– Definir la orientación de los ejes
en un instante de tiempo dado– ECI usa orientación del plano
ecuatorial a: 12:00h, 1 de Enero de 2000
¿También hay referencias temporales especiales para GPS?...
40Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.2. Sistemas de referencia: tiempo GPS (3/4)
Necesidades:• Sincronizar señales emitidas (instantes de tiempo o Epochs) y
medir tiempos de propagación (intervalos)
• Con gran precisión (1 us => 300 m error)
Métodos de medida tiempo:• Observar un proceso periódico y contar los ciclos => reloj
• Precisión depende de: bias y deriva en frecuencia
• Ejemplos:– Rotación de la Tierra alrededor del Sol => año
– Rotación de la Tierra alrededor de si misma => segundo• día Solar (24h) => 1 s=día_solar/86400 => GMT (Greenwich Mean Time)
• día Sideral (23h:56’) => dia_sideral/2=11h:58’ periodo de giro de satélites
– Frecuencia de resonancia del átomo de Cesio => segundo• 1 s = 9.192.631.770 periodos en una transición en átomo de Cesio• Surge el UTC (Universal Time Coordinate)
– Usa una red de relojes atómicos (TAI) y los re-calibra en base a la rotación de la Tierra y observaciones astronómicas, con correciones de +/- 1 s
¿Y qué base de tiempos usa el GPS finalmente?...

41Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.2. Sistemas de referencia: tiempo GPS (4/4)
GPS Time (GPST):• Parecido a UTC pero:
– Es continuo (sin saltos por reajustes de +/- 1 s)– Tiempo Real (no depende de observaciones astronómicas)– GPST sigue continuamente a UTC dentro de 1 us modulo 1 s
• Es decir usa los relojes atómicos mundiales que usa UTC pero no hace caso de los reajustes astronómicos
• GPST≈UTC+13 s (1 Enero de 2001)
• Un instante de tiempo en GPST (Epoch):– Numero de semana (mod 1024) + segundos trascurridos en la semana– Empezo a las 24h del 5 Enero de 1980 (Medianoche de Sábado a
Domingo) => Todos los sábados a las 24h cambia el nº de la semana
• El segmento control monitoriza el bias “reloj del satélite GPST“ => bias mandado al satélite y retrasmitido en mensaje navegación
Pero para hacer trilateración debo saber donde están los satélites¿Cómo lo se con exactitud si no paran de moverse en sus órbitas?...
42Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (1/8)
Objetivo:Conocer exactamente la posición de los satélites
-0.296182Right ascension @ ref time (rad)
0.95469Inclination angle (rad)
0.000145862Corrected Mean Motion (rad/sec)
2.65594E+07Semi-Major Axis (meters)
466944Reference time almanac
7.63976E-11Clock correction term 2
0.000148773Clock correction term 1
5153.58Sqrt semi-major axis (m^1/2)
-8.01176E-09Rate right ascension (rad/sec)
-1.31888Argument of Perigee (rad)
2.79387Mean Anomaly @ ref time (rad)
0.00388718Corr: inclination angle (rad)
0.00346661Eccentricity
797Reference Week of Almanac
0Health of SV
1PRN number for data
1ALMANAC FOR SATELLITE:
Decoded from Subframes 4 and 5 of GPS Data Bit Frames
GPS usa el Enfoque B• La Efemérides que describe la
órbita se desglosa en:– Almanaque (información aprox.):
– Para funciones de inicialización rápida del receptor y gestión de satélites visibles
– Efemérides (información precisa):– Para localizar con gran precisión
al satélite
Enfoques:• A) Enviar continuamente la posición
actual (x,y,z-ECEF) del satélite
• B) Enviar descripción de la órbita (Efemérides) con poca frecuencia
– El receptor interpreta descripción y deduce posición actual (x,y,z-ECEF)
43Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (2/8)
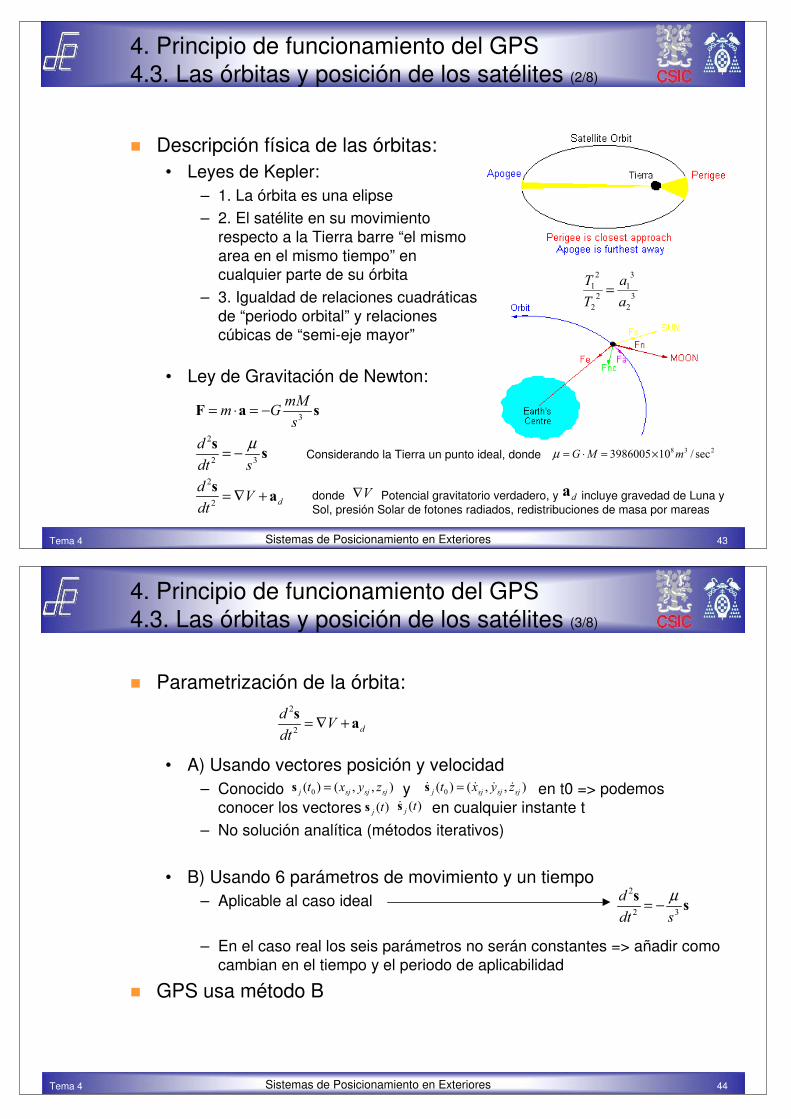
Descripción física de las órbitas:• Leyes de Kepler:
– 1. La órbita es una elipse– 2. El satélite en su movimiento
respecto a la Tierra barre “el mismoarea en el mismo tiempo” en cualquier parte de su órbita
– 3. Igualdad de relaciones cuadráticas de “periodo orbital” y relaciones cúbicas de “semi-eje mayor”
• Ley de Gravitación de Newton:
dVdt
d
sdt
d
s
mMGm
as
ss
saF
+∇=
−=
−=⋅=
2
2
32
2
3
µ238 sec/103986005 mMG ×=⋅=µ
V∇donde Potencial gravitatorio verdadero, y incluye gravedad de Luna y Sol, presión Solar de fotones radiados, redistribuciones de masa por mareas
Considerando la Tierra un punto ideal, donde
da
3
2
3
1
2
2
2
1
a
a
T
T=
44Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (3/8)
Parametrización de la órbita:
• A) Usando vectores posición y velocidad– Conocido y en t0 => podemos
conocer los vectores en cualquier instante t
– No solución analítica (métodos iterativos)
• B) Usando 6 parámetros de movimiento y un tiempo – Aplicable al caso ideal
– En el caso real los seis parámetros no serán constantes => añadir como cambian en el tiempo y el periodo de aplicabilidad
GPS usa método B
),,()( 0 sjsjsjj zyxt &&&& =s),,()( 0 sjsjsjj zyxt =s
)(tjs )(tjs&
dVdt
da
s+∇=
2
2
ss
32
2
sdt
d µ−=

45Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (4/8)
Definición de los parámetros:• Tiempo de Epoch (cuando el satélite está en la posición A)
• 3 parámetros que dan la forma de la órbita y ubicación del satélite:– Semi-eje mayor de la elipse
– Excentricidad de la elipse– “True Anomaly” “Mean Anomaly”
et0
a
aaee =
0Mν
46Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (5/8)
Definición de parámetros (cont.):• 3 parámetros definiendo la
orientación de la órbita– Inclinación : ángulo entre plano
ecuatorial Terrestre y plano orbital– Longitud nodo ascensión : ángulo
en plano ecuatorial cuando plano orbital cruza al ecuatorial con componente +z de velocidad
– Argumento del Perigeo : ángulo en plano orbital desde el nodo ascendente a la dirección del perigeo de la órbita
• 9 parámetros de correción:– Ajustan los 6 parámetros anteriores
entre los periodos de actualización de las efemérides. p.ej:
i
Ω
w
dt
diΩ&Cambio del ángulo de inclinación Cambio de longitud del nodo de ascensión

47Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (6/8)
Los parámetros completos definiendo las órbitas son:
9 parámetros decorrección
6 parámetros fundamentales
¿Cómo se mandan estos datos?...
48Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (7/8)
La Efemérides se manda dentro de los “Datos de Navegación”• Información trasmitida de cada satélite al receptor GPS (tasa 50 bits/s)• Cada 30’’ se manda 1 Frame con 5 Subframes (300 bits):
– Subframe 1: Correciones de reloj del satélite, salud, edad de datos– Subframe 2-3: Efemerides del Satélite– Subframe 4-5: Una fraccion (1/25) del Almanaque de todos los satélites y
parámetros de modelos de la ionosfera• Trascurridos 12.5’ se completan los 25 Frames (y se actualiza Almanaque)
49Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.3. Las órbitas y posición de los satélites (8/8)
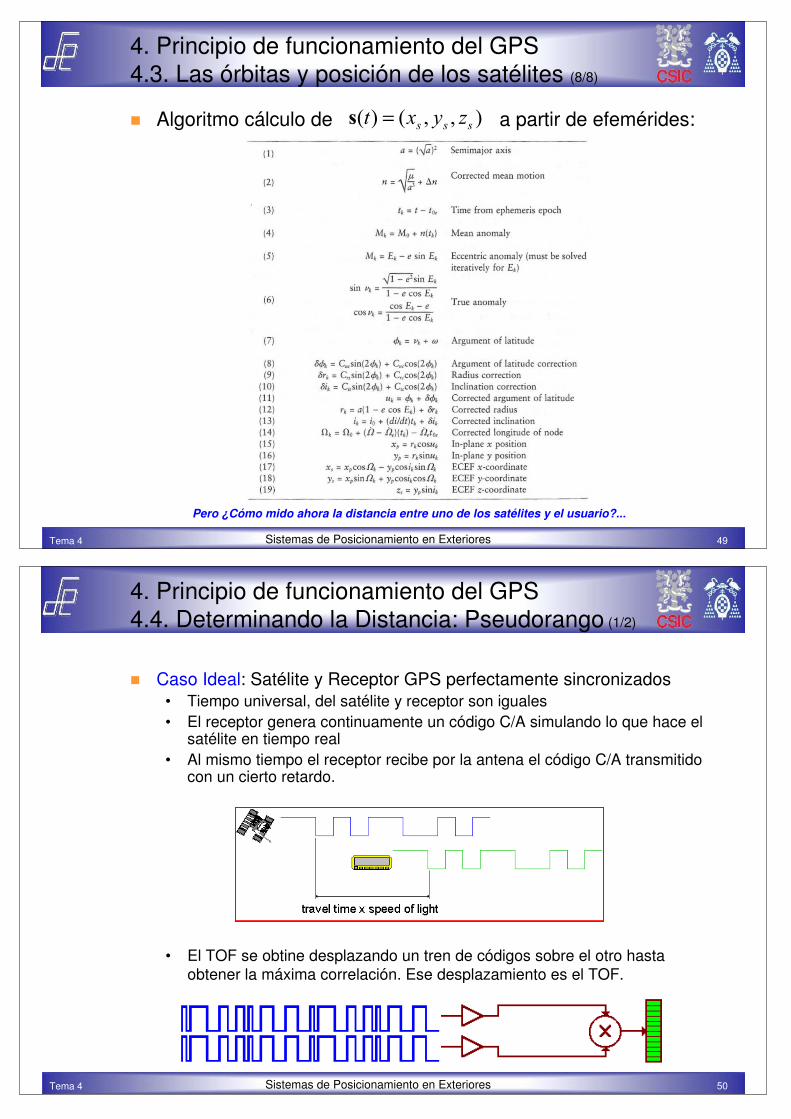
Algoritmo cálculo de a partir de efemérides:),,()( sss zyxt =s
Pero ¿Cómo mido ahora la distancia entre uno de los satélites y el usuario?...
50Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.4. Determinando la Distancia: Pseudorango (1/2)
Caso Ideal: Satélite y Receptor GPS perfectamente sincronizados• Tiempo universal, del satélite y receptor son iguales• El receptor genera continuamente un código C/A simulando lo que hace el
satélite en tiempo real• Al mismo tiempo el receptor recibe por la antena el código C/A transmitido
con un cierto retardo.
• El TOF se obtine desplazando un tren de códigos sobre el otro hasta obtener la máxima correlación. Ese desplazamiento es el TOF.

51Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.4. Determinando la Distancia: Pseudorango (2/2)
Caso Real: Ausencia de sincronismo• El rango calculado en el receptor se conoce como pseudorango, , ya que
contiene:– La distancia geométrica o rango real: – Error en tiempo entre tiempo universal y reloj receptor: – Error en tiempo entre tiempo universal y reloj del satélite:
tcTTcr su ∆⋅=−= )(
ut
tδ
c
tT
tT
T
T
uu
s
u
s
+
+δ
Velocidad de la luz: 300.000km/s
Tiempo en que se recibió la señal según reloj receptor
Tiempo en que se generó la señal según reloj de Satélite
Tiempo de Sistema en que se recibió la señal en receptor
Tiempo de Sistema en que se generó la señal en el satélite
ρ
)()()()]()[( ttcrttcTTctTtTc uususuu δδδρ −+=−+−=+−+=
)( ttcr u δρ −+= Aunque (< 1mseg) es conocido mediante la efemérides, pero no
tδ
ut
52Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (1/6)
Ejemplo cálculo de posición en:• Caso ideal (sincronismo)
– En un punto cortan 3
• Error sincronismo en receptor– Tres puntos con 2 cortes
Conclusión:• Si =>
aumenta la incertidumbre en el posicionamiento
0>ut

53Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (2/6)
Objetivo: Calcular posición del usuario y el error de sincronismo
jj
j
sjsjsjj
uuu
r
zyx
zyx
r
r
s
u
=
=
=
),,(
),,(
Vector del satélite j al usuario
Rango ideal o verdadero
Vector de posición del satélite j
Vector de posición del usuario
Con ellos se plantea un sistema de ecuaciones, que representa el corte en la posición del usuario de varias esferas centradas en los satélites
),,( uuu zyx=u ut
uusjusjusjj
ujujj
tczzyyxx
tcrtc
⋅+−+−+−=
⋅+=⋅+=
222 )()()(ρ
ρ r
Definimos los vectores de posición de los satélites y del usuario (incógnita) referidos a ECEF:
donde j = 1..4 (o más)
jρ Se necesitan al menos 4 medidas de pseudorango, , a satélites
Para resolverlo, primeramente linealizaremos las ecuaciones respecto a los términos desconocidos, usando series de Taylor, y posteriormente se buscará una solución de forma iterativa partiendo de una posición de usuario aproximada :
Somos conscientes que estamos simplificando al no tener en cuenta: rotación de la Tierra durante la emisión de la señal, retardos añadidos debido a la atmósfera, o efectos relativistas (ver sección 6: “fuentes de error”)
54Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (3/6)
Linealización de las ecuaciones Si sabemos aproximadamente donde está la posición del usuario, , podemos calcular la posición del usuario real, , (análogo para el sincronismo) mediante esta expresión:
)ˆ,ˆ,ˆ( uuu zyx),,( uuu zyx
),,,()()()(
)ˆ,ˆ,ˆ,ˆ(ˆ)ˆ()ˆ()ˆ(ˆ
222
222
uuuuuusjusjusjj
uuuuuusjusjusjj
tzyxftczzyyxx
tzyxftczzyyxx
=⋅+−+−+−=
=⋅+−+−+−=
ρ
ρ
Ahora podemos hacer una linealización usando series de Taylor:
Los pseudorangos aproximados y medidos, que definen la función f son:
K+∆⋅∂
∂+∆⋅
∂
∂+
+∆⋅∂
∂+∆⋅
∂
∂+=
=∆+∆+∆+∆+=
u
u
uuuuu
u
uuuu
u
u
uuuuu
u
uuuuuuuu
uuuuuuuuuuuu
tt
tzyxfz
z
tzyxf
yy
tzyxfx
x
tzyxftzyxf
ttzzyyxxftzyxf
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
)ˆ,ˆ,ˆ,ˆ()ˆ,ˆ,ˆ,ˆ(
)ˆ,ˆ,ˆ,ˆ(),,,(
=∂
∂
−−=
∂
∂
−−=
∂
∂
−−=
∂
∂
ct
tzyxf
r
zz
z
tzyxf
r
yy
y
tzyxf
r
xx
x
tzyxf
u
uuuu
j
usj
u
uuuu
j
usj
u
uuuu
j
usj
u
uuuu
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
ˆ
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
ˆ
ˆ
)ˆ,ˆ,ˆ,ˆ(
ˆ
ˆ
ˆ
)ˆ,ˆ,ˆ,ˆ(
222)ˆ()ˆ()ˆ(ˆ
usjusjusjj zzyyxxr −+−+−=
uu
j
usj
u
j
usj
u
j
usj
jj tczr
zzy
r
yyx
r
xx∆+∆
−−∆
−−∆
−−=
ˆ
ˆ
ˆ
ˆ
ˆ
ˆρρ
donde es el rango ideal desde la ubicación aproximada del usuario
Con lo cual obtenemos la ecuación linealizada que relaciona elpseudorango medido e inventado, la posición de los satélites, el rango a los satélites, la posición del usuario inventada, con el incremento de posición para obtener la posición verdadera del usuario
),,,()ˆ,ˆ,ˆ,ˆ(),,,( uuuuuuuuuuuu tzyxtzyxtzyx ∆∆∆∆+= Incógnitas

55Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (4/6)
Despejando las incognitas:
uu
j
usj
u
j
usj
u
j
usj
jj tczr
zzy
r
yyx
r
xx∆+∆
−−∆
−−∆
−−=
ˆ
ˆ
ˆ
ˆ
ˆ
ˆρρ
−=
−=
−=
−=∆
j
usj
zsj
j
usj
ysj
j
usj
xsj
jj
r
zza
r
yya
r
xxa
j
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ ρρρ Reagrupando términos…
e introduciendo estas nuevas variables:
tenemos..
donde hay cuatro incógnitas que pueden resolverse haciendo cuatro medidas de distancia a satélites, resolviendo este sistema lineal de ecuaciones:
∆−∆+∆+∆=∆
∆−∆+∆+∆=∆
∆−∆+∆+∆=∆
∆−∆+∆+∆=∆
uuzsuysuxs
uuzsuysuxs
uuzsuysuxs
uuzsuysuxs
tczayaxa
tczayaxa
tczayaxa
tczayaxa
4444
3333
2222
1111
ρ
ρ
ρ
ρ
uuzsjuysjuxsjj tczayaxa ∆−∆+∆+∆=∆ρ
∆−
∆
∆
∆
=∆
=
∆
∆
∆
∆
=∆
u
u
u
u
zsysxs
zsysxs
zsysxs
zsysxs
tc
z
y
x
aaa
aaa
aaa
aaa
xHρ
1
1
1
1
444
333
222
111
4
3
2
1
ρ
ρ
ρ
ρ
xHρ ∆⋅=∆ ρHx ∆⋅=∆ −1
( ) ρHHHx ∆⋅⋅=∆− TT 1 En el caso de utilizar más de 4 satélites, la solución se obtiene por mínimos
cuadrados, minimizando una función de coste con la suma de los cuadrados de los residuos, cuya solución queda así:
y la solución es:que de forma matricial queda…
Una vez obtenida la solución de los incrementos, calculamos la posición del usuario, y el error de sincronismo, mediante: ),,,()ˆ,ˆ,ˆ,ˆ(),,,( uuuuuuuuuuuu tzyxtzyxtzyx ∆∆∆∆+=
Iterativamente, sustituyendo por se aplica de nuevo hasta que los incrementos sean suficientemente pequeños
)ˆ,ˆ,ˆ,ˆ( uuuu tzyx),,,( uuuu tzyx
56Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (5/6)
Interpretación de H:
=
=
1
1
1
1
1
1
1
1
4
3
2
1
444
333
222
111
s
s
s
s
zsysxs
zsysxs
zsysxs
zsysxs
aaa
aaa
aaa
aaa
a
a
a
a
H
−=
−=
−=
j
usj
zsj
j
usj
ysj
j
usj
xsj
r
zza
r
yya
r
xxa
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
( )zsjysjxsjsj aaa ,,=a
Estos términos…
representan las proyecciones en x, y, z de la distancia entre el satélite j y la posición del usuario aproximada (todos normalizados por dicha distancia)O dicho de otro modo: son los cosenos directores del vector unitario que con origen en la posición aproximada del usuario apunta al satélite j
El vector unitario que apunta al satélite j es:
Por tanto la matriz H engloba en cada una de sus filas los vectores unitarios a cada uno de los satélites visibles
La matriz H nos da una indicación de: La fiabilidad de la estimación de la posición para un conjunto dado de satélites visibles en el cielo desde el receptor (error geométrico DOP que depende de ubicación de satélites) Propagación de los errores de los pseudorangos a las estimaciones de posición del usuario: Utilizando más de cuatro satélites (configuración redundante) se consigue modificar H y por tanto que los errores en los pseudorangos se propaguen menos a la medida de posición
ρεHε1−=x

57Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.5. Posición del Usuario usando Pseudorangos (6/6)
Ejemplo:
4
3
2
1
j
6069947.224-21425358.24-14799931.3957
20378551.047-3069625.56116680243.35731
11917038.105-23287906.465-2304058.53427
13512272.387-16649826.22215524471.17515
Coordenadas en ECEF Satélite
742.205961754.283098500.133930971.89491 4321 ==== ρρρρ
3230000ˆ5440000ˆ730000ˆ =−=−= uuu zyx
),,( sjsjsj zyx
222 )ˆ()ˆ()ˆ(ˆusjusjusjj zzyyxxr −+−+−=
−=
−=
−=
j
usj
zsj
j
usj
ysj
j
usj
xsj
r
zza
r
yya
r
xxa
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ρHx ∆⋅=∆ −1
−
−
=∆
997.12345
286.1193
932.3791
496.3186
x
),,,()ˆ,ˆ,ˆ,ˆ(),,,( uuuuuuuuuuuu tzyxtzyxtzyx ∆∆∆∆+= )997.12345,286.3231193,932.5443791,496.733186(),,,( −−=uuuu tzyx
1) Conozco:
1.1) Las coordenadas de los satélites:
1.2) Los pseudorangos:
1.3) La posición del receptor aproximada:
2) Por cada satélite j=1..4 calculo los vectores unitarios apuntando al satélite mediante:
3) Obtengo las correcciones de posición de receptor:
4) Finalmente aplico las correcciones a la posición de receptor:
( )zsjysjxsjsj aaa ,,=a
=
1
1
1
1
4
3
2
1
s
s
s
s
a
a
a
a
H jjj ρρρ −=∆ ˆ
5) Mientras las correciones sean significativas ir al paso 2,haciendo antes la asignación:
),,,()ˆ,ˆ,ˆ,ˆ( uuuuuuuu tzyxtzyx =
58Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.6. Velocidad del Usuario (1/2)
Método básico:
Método Doppler:
),,(
),,(
sjsjsjj
uuu
zyx
zyx
&&&&
&&&&
=
=
s
u
Vector de velocidades del satélite j
Vector de velocidades del usuario
12
12 )()(
tt
tt
dt
d
−
−≈=
uuuu&
1) Conozco:
1.1) La velocidad de satélites por efemérides: ),,( sjsjsjj zyx &&&& =s
),,( uuu zyx &&&& =u
Frecuencia recibida del satelite j(Ecuación Doppler)
Velocidad relativa Satélite-Usuario
Frecuencia trasmitida (L1)
usr
ar
&&&
&
−=
⋅−=
jj
jj
TRj
T
cff
f
1
1.2) La frecuencia trasmitida de portadora: 1575.42 MHzTf
1.3) El vector unitario apuntando al satélite jja
2) Deduzco a partir de la Ecuación Doppler
jf
⋅−
−=c
ffjj
TRj
aus )(1
&&
Objetivo: Averiguar y la deriva del reloj del receptorut&
1.4) Frecuencia medida en receptor
y de la relación:)1( u
Rj
jt
ff
&+=
T
uj
jjj
T
Tj
f
tcf
f
ffc &
&& −⋅=⋅+−
auas)(
y expandiendo el producto vectorial…
O.K. si velocidad cte
Si reloj se adelanta => la frecuencia medida menor0>ut& jf

59Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.6. Velocidad del Usuario (2/2)
Método Doppler (cont)
T
uj
zsjuysjuxsjuzsjsjysjsjxsjsj
T
Tj
f
tcfazayaxazayax
f
ffc &
&&&&&& −++=+++− )(
=
=
=
),,(
),,(
),,(
zsjysjxsjsj
sjsjsjj
uuu
aaa
zyx
zyx
a
s
u
&&&&
&&&&
donde
la expresión expandida multiplicando los vectores es
Introducimos la nueva variable que recoge los términos conocidos a la izquierda jd
la expresión queda simplificada
zsjsjysjsjxsjsj
T
Tj
j azayaxf
ffcd &&& +++
−=
)(
uzsjuysjuxsjuj tcazayaxd &&&& −++=
…y asumiendo que… 1≈T
j
f
f
Tenemos cuatro incógnitas que se obtienen con 4 ecuaciones al emplear 4 satélites ),,,( uuuu tzyx &&&&
−
=
=
=
u
u
u
u
zsysxs
zsysxs
zsysxs
zsysxs
tc
z
y
x
aaa
aaa
aaa
aaa
d
d
d
d
&
&
&
&
gHd
1
1
1
1
444
333
222
111
4
3
2
1
gHd ⋅=
dHg1 ⋅= −
La solución final es
donde se vé que la precisión en la determinación de la posición depende la precisión en medir la frecuencia en recepción, , la velocidad del satélite, , y la posición del usuario respecto a los satélitesjs& jajf
Siendo H la misma matriz utilizada antes para estimar la posición
60Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.7. Transf. Coordenadas y Modelo de la Tierra (1/5)
Objetivo:• Poder transformar las coordenadas de posición en ECEF a
coordenadas de Latitud-Longitud-Altura (h)
• Conversión de Altura Elipsoidal (h) a Altura geodésica (H)
Modelos de la Tierra:• Planos
– Zonas locales < 10 km. Curvatura despreciable
• Esféricos– Navegación corto alcance:
VOR
• Elipsoidales– Navegación largo alcance:
Loran-C y GPS

61Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.7. Transf. Coordenadas y Modelo de la Tierra (2/5)
Ejemplos de modelos elipsoidales (Datum)
GPS
a )/(/1 baaf −=
62Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.7. Transf. Coordenadas y Modelo de la Tierra (3/5)
Algoritmo conversión ECEF a Longitud ( )–Latitud ( )–altura ( )φλ h
−≈
⋅⋅−
⋅⋅+≈
=
)(cos
cos
sinarctan
),(2arctan
32
32'
φφ
θ
θφ
λ
Np
h
aep
bez
xy
u
uu
2
222'22
arctanb
bae
bp
azxyp uuu
−=
⋅
⋅=+= θ
22 2 ffea
baf −=
−=
φφ
22 sin1)(
e
aN
−=
donde
radio de curvatura
+−=
+=
+=
φ
λφ
λφ
sin])1([
sincos)(
coscos)(
2 heNz
hNy
hNx
u
u
u
λ
φh
),,( uuu zyx=u
Excentricidadsecundaria
Algoritmo inverso:
Algoritmo directo:
(aproximación con 1 cm de error)

63Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.7. Transf. Coordenadas y Modelo de la Tierra (4/5)
La Geoide: • Superficie irregular, normal al campo gravitatorio (nivelada) y equipotencial
(misma g) que conincide con el nivel medio del mar en los océanos
HhN −=
N
h
H
Separación geoide-elipse o altura de geoide
Altura elipsoidal (GPS)
Altura clásica (ortométrica)
64Tema 4 Sistemas de Posicionamiento en Exteriores
4. Principio de funcionamiento del GPS4.7. Transf. Coordenadas y Modelo de la Tierra (5/5)
Conversión de h (altura GPS) a H (altura geodésica)
NhH −=
N