tema 1 iii - semestre 3... · 2015-09-16 · funciones vectoriales de variable real prof. u.c.v....
TRANSCRIPT

Semestre
3-2009 José Luis Quintero
Octubre 2009
TEMA 1
FUNCIONES VECTORIALES DE UNA VARIABLE
REAL
Cálculo III (0253)
Semestre 3-2009

Funciones Vectoriales
de Variable Real
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Las notas presentadas a continuación tienen como único fin, el de prestar apoyo al
estudiante y facilitar su entendimiento en el tema de funciones vectoriales de una variable
real.
La guía contempla un pequeño resumen de la teoría correspondiente que sirve de
repaso a los contenidos teóricos que componen el tema. Se presentan ejercicios resueltos y
propuestos, algunos son originales, otros se han tomado de guías redactadas por profesores,
también hay ejercicios tomados de exámenes y de algunos textos. Se ha tratado de ser lo
más didáctico posible y se espera prestar un apoyo a la enseñanza del Cálculo III en
Ingeniería.
Agradezco las observaciones y sugerencias que me puedan hacer llegar en la mejora
del presente material, las mismas pueden ser enviadas a la siguiente dirección de correo:

INDICE GENERAL Funciones Vectoriales
de Variable Real
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.1. Vectores
1.2. Cantidades escalares y vectoriales
1.3. Función vectorial de una variable real
1.4. Ejercicios resueltos
1.5. Parametrización de algunas curvas
1.6. Ejercicios resueltos
1.7. Gráfica de curvas paramétricas con Graphmatica
1.8. Longitud, magnitud o norma de un vector
1.9. Producto escalar
1.10. Ángulo entre vectores
1.11. Producto vectorial
1.12. Límite de una función vectorial
1.13. Continuidad de una función vectorial
1.14. Derivada de una función vectorial
1.15. Interpretación geométrica y física de la derivada
1.16. Integral de una función vectorial
1.17. Longitud de arco
1.18. Ejercicios resueltos
1.19. Gráficas de curvas paramétricas en R2
1.20. Ejercicios resueltos
1.21. Vectores canónicos. Direcciones
1.22. Vectores ortogonales. Proyección ortogonal
1.23. Cálculo de la proyección de un vector sobre otro
1.24. Formas de la ecuación del plano
1.25. Sistema de coordenadas móvil
1.26. Ejercicios resueltos
1.27. Curvatura
1.28. Curvatura para una recta. Curvatura para una circunferencia
1.29. Componentes tangencial y normal de la aceleración
1.30. Circunferencia osculatriz y centro de curvatura
1.31. Torsión
1.32. Fórmulas de Frenet
1
2
3
5
7
13
23
23
25
25
26
29
30
31
31
32
32
34
39
46
60
61
62
63
65
68
70
72
73
74
75
75

INDICE GENERAL Funciones Vectoriales
de Variable Real
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.33. Ejercicios resueltos
1.34. Sistema de coordenadas polares
1.35. Representaciones de una curva en polares
1.36. Ecuación polar de una recta
1.37. Ecuación polar de una circunferencia
1.38. Distancias en coordenadas polares
1.39. Ecuación polar de una cónica
1.40. Gráficas en coordenadas polares
1.41. Intersección de curvas en polares
1.42. Forma paramétrica de una curva en polares. Búsqueda de tangentes
1.43. Longitud de arco y área en polares
1.44. Resumen de fórmulas
1.45. Ejercicios resueltos
1.46. Ejercicios propuestos
78
93
94
95
96
97
09
99
101
102
104
105
106
120

VECTORES Funciones Vectoriales
de Variable Real Pág.: 1 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.1. VECTORES
Definición 1. Un vector es un objeto de la forma x 1 2 n(x ,x ,..., x )= con ix R,∈ i 1,...,n= .
Un vector es una magnitud representada por un segmento dirigido (flecha). Se
caracteriza por poseer:
a. Una longitud, la que es representada por un valor numérico al que se llama módulo,
norma o tamaño del vector (ver figura 1).
Figura 1. Cálculo del módulo, norma o tamaño de un vector
b. Una dirección, que es la recta a la que pertenece (ver figura 2).
c. Un sentido. La recta posee dos sentidos, generalmente estos se indican mediante signos
“+” para un lado y “-” para el otro (ver figura 2).
Figura 2. Dirección y sentido de un vector

VECTORES Funciones Vectoriales
de Variable Real Pág.: 2 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Los vectores pueden situarse en el plano, (dos dimensiones) (ver figura 3), en el
espacio (tres dimensiones) (ver figura 4) y hasta en dimensiones mayores a tres. Los vectores
que se encuentren en el plano se llamarán “pares”, mientras los que se ubiquen en el espacio
se llamarán “ternas”.
Figura 3. Vector en dos dimensiones
Figura 4. Vector en tres dimensiones
1.2. CANTIDADES ESCALARES Y VECTORIALES
Diversas medidas como la temperatura, distancia, masa, tiempo, densidad, energía,
área, altura, etc, se pueden representar mediante un solo número real, estas se llaman
cantidades escalares. Otras como la fuerza que actúa sobre un objeto, velocidad y
aceleración de un cuerpo, necesitan, además de la magnitud, describir una dirección y un
sentido. Estas se llaman cantidades vectoriales y se logra describirla mediante
coordenadas. Se estudiarán con detalle algunas características de estas últimas cantidades.
CANTIDADES ESCALARES Y VECTORIALES
Funciones Vectoriales de Variable Real Pág.: 3 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.3. FUNCIÓN VECTORIAL DE UNA VARIABLE REAL
Definición 2. Se define una función vectorial de variable real como: r n: I R→ ,
r 1 nt (t) (r (t),...,r (t))→ = , donde I es un intervalo en R, ir con i 1,...,n= es una función real de
variable real con dominio iI . Las funciones ir se llaman funciones coordenadas de la función
r.
Definición 3. El dominio de una función vectorial r es la intersección de los dominios de
las funciones coordenadas, es decir,
rn
ii 1
D( ) I I=
= =∩ .
Ejemplo 1. Dada la función r 3(t) ( t 3, t 3, t )= − + , encuentre su dominio.
Solución.
Las funciones coordenadas vienen dadas por:
1 1
2 2
33 3
r (t) t 3 D(r ) [3, )
r (t) t 3 D(r ) [ 3, )
r (t) t D(r ) R
= − ⇒ = ∞
= + ⇒ = − ∞
= ⇒ =
.
Por lo tanto,
r3
ii 1
D( ) D(r) [3, )=
= = ∞∩ .
Definición 4. El rango o imagen de una función vectorial r es un conjunto de puntos en nR . Muchas funciones vectoriales con imagen en 2R o 3R tienen como rango lugares
geométricos conocidos.
Ejemplo 2. Dada la función r (t) (4 cos(t),4sen(t)), t [0,2 ]= ∈ π ,
encuentre su rango o imagen.
Solución.
La imagen de la función es una circunferencia de radio 4. En efecto llamando a sus funciones coordenadas x(t) 4 cos(t), y(t) 4sen(t)= = , se tiene
2 2 2 2x y 16 cos (t) 16sen (t) 16+ = + = .

FUNCIÓN VECTORIAL DE UNA VARIABLE REAL
Funciones Vectoriales de Variable Real Pág.: 4 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 3. Dada la función r (t) (2 t,3 2t,1 2t), t R= + + + ∈ , encuentre su rango o imagen.
Solución.
Se puede observar que cada función coordenada corresponde a una ecuación paramétrica de
una recta, en este caso, en 3R .
El rango o imagen de una función vectorial es un conjunto de puntos en nR , que se
llama curva. Una curva puede ser representada por una o más funciones vectoriales.
Ejemplo 4. Las funciones vectoriales definidas como f (t) (1 2t,2 t) , t [0,1]= + − ∈ y g (t) (3 2t,1 t) , t [0,1]= − + ∈
tienen el mismo conjunto imagen: el segmento de recta que une los puntos (1,2) y (3,1).
Observación 1. Una función vectorial r lleva implícita dos características fundamentales: la
forma de la curva (imagen de la función) y la manera como se recorre ésta (sentido de
recorrido y posición).
Observación 2. Si la función r es inyectiva, es decir, r r1 2 1 2 1 2t , t I, t t (t ) (t )∀ ∈ ≠ ⇒ ≠ la curva
no tiene puntos de autointersección, se dirá en este caso que es una curva simple. Si r r(a) (b)= se dirá que la curva es cerrada en [a,b].
Ejemplo 5. La circunferencia f(t) (2cos(t),2sen(t))= con 0 t 2≤ ≤ π , es una curva cerrada, ya
que f f(0) (2 )= π .
Ejemplo 6. La curva conocida con el nombre de estrofoide (ver figura 5) imagen de la función
r2 3
2 2
t 1 t t(t) ,
t 1 t 1
− −= + + ,
no es una curva simple, se autointersecta, en efecto: r r(1) ( 1).= −
Figura 5. Representación gráfica de la estrofoide

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 5 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.4. EJERCICIOS RESUELTOS
1. Dada la función r 3(t) (t, t ), t R= ∈ , encuentre su rango o imagen.
Solución. El rango o imagen en este caso viene dado por la gráfica de 3y x= .
2. Encuentre los valores de t para los cuales la curva
r2
2
t t(t) ,
1 t t 1
= − −
se autointersecta.
Solución. Sean 1t A= y 2t B= . Se tiene entonces:
2 22 2 2 2 2 2 2 2 2 2A B
A (1 B) B (1 A) A A B B B A A B B A A B 01 A 1 B
(A B)(A B) AB(B A) 0 AB(B A) (B A)(B A) 0(AB A B)(B A) 0 A B o AB A B
= ⇒ − = − ⇒ − = − ⇒ − + − =− −
⇒ − + + − = ⇒ − − − + =⇒ − − − = ⇒ = = +
Por otro lado
2 2 2 2 2 22 2
A BA(B 1) B(A 1) AB A A B B AB A B B A 0
A 1 B 1AB(B A) (B A) 0 (AB 1)(B A) 0 A B o AB 1
= ⇒ − = − ⇒ − = − ⇒ − + − =− −
⇒ − + − = ⇒ + − = ⇒ = = −
Se puede concluir que A B 1 B (A 1)+ = − ⇒ = − + de modo que
2 22 2 3 2 2
3 2 2 3 2 3 2
A (A 1)A (A 2) (A 1) (1 A) A 2A (A 2A 1)(1 A)
1 A A 2A 2A A A 2A 2A 1 A 2A 3A A 1 0
+= ⇒ + = + − ⇒ + = + + −− +
⇒ + = − + − + − ⇒ + − − =
Aplicando Ruffini se tiene
1 2 31 1 5 1 5
A , A , A2 2 2
− − − += − = = .
Buscando los puntos se tiene: 1 1
A B2 2
= − ⇒ = − (No dice nada).
1 5 1 5 1 5 1 5A B 1
2 2 2 2
+ + − − += − ⇒ = − − = − =
punto de autointersección
Se concluye que
r r1 5 1 5
(1, 1).2 2
+ − +− = = −
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 6 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
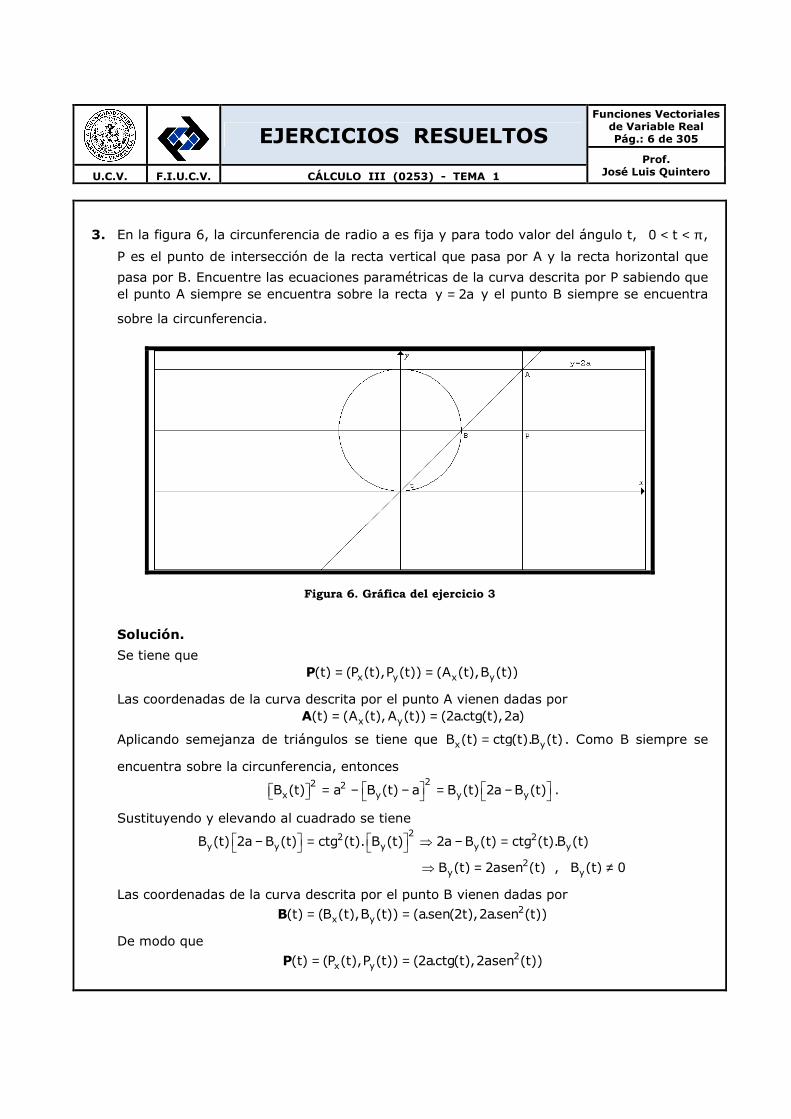
3. En la figura 6, la circunferencia de radio a es fija y para todo valor del ángulo t, 0 t< < π ,
P es el punto de intersección de la recta vertical que pasa por A y la recta horizontal que
pasa por B. Encuentre las ecuaciones paramétricas de la curva descrita por P sabiendo que el punto A siempre se encuentra sobre la recta y 2a= y el punto B siempre se encuentra
sobre la circunferencia.
Figura 6. Gráfica del ejercicio 3
Solución.
Se tiene que
x y x y(t) (P (t),P (t)) (A (t),B (t))= =P
Las coordenadas de la curva descrita por el punto A vienen dadas por A x y(t) (A (t), A (t)) (2a.ctg(t),2a)= =
Aplicando semejanza de triángulos se tiene que x yB (t) ctg(t).B (t)= . Como B siempre se
encuentra sobre la circunferencia, entonces 22 2
x y y yB (t) a B (t) a B (t) 2a B (t) = − − = − .
Sustituyendo y elevando al cuadrado se tiene
22 2y y y y y
2y y
B (t) 2a B (t) ctg (t). B (t) 2a B (t) ctg (t).B (t)
B (t) 2asen (t) , B (t) 0
− = ⇒ − =
⇒ = ≠
Las coordenadas de la curva descrita por el punto B vienen dadas por
B 2x y(t) (B (t),B (t)) (a.sen(2t),2a.sen (t))= =
De modo que 2
x y(t) (P (t),P (t)) (2a.ctg(t),2asen (t))= =P

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 7 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.5. PARAMETRIZACIÓN DE ALGUNAS CURVAS
a. Recta. La imagen de la función vectorial
f 0 1 0 0 1 0(t) (x (x x )t, y (y y )t)= + − + − , t R∈
es una recta que pasa por los puntos 0 0(x ,y ) y 1 1(x ,y ) recorrida en el sentido que va
desde el punto 0 0(x ,y ) al punto 1 1(x ,y ) . Si se desea cambiar el sentido, basta con
cambiar t por t− . En tal caso se obtiene la función vectorial g 0 0 1 0 0 1(t) (x (x x )t,y (y y )t)= + − + − , t R∈
que resulta ser una recta que pasa por los puntos 0 0(x ,y ) y 1 1(x ,y ) recorrida en el
sentido que va desde el punto 1 1(x ,y ) al punto 0 0(x ,y ) .
Observación 3. Si se desea parametrizar un segmento de recta de extremos 0 0(x ,y ) y
1 1(x ,y ) recorrido en el sentido que va desde el punto 0 0(x ,y ) al punto 1 1(x , y ) se
consigue usando la función vectorial f 0 1 0 0 1 0(t) (x (x x )t,y (y y )t)= + − + − , t 0,1∈
b. Circunferencia. La imagen de la función vectorial f(t) (h r cos(t),k rsen(t)),= + + t [0,2 ]∈ π
es una circunferencia de centro (h,k) y radio r recorrida en sentido antihorario.
La imagen de la función vectorial g(t) (h r cos(t),k rsen(t)),= + − t [0,2 ]∈ π
es una circunferencia de centro (h,k) y radio r recorrida en sentido horario.
c. Elipse. La imagen de la función vectorial f(t) (h acos(t),k bsen(t)),= + + t [0,2 ]∈ π
es una elipse de ecuación 2 2
2 2
(x h) (y k)1
a b
− −+ =
recorrida en sentido antihorario.
La imagen de la función vectorial g(t) (h acos(t),k bsen(t)),= + − t [0,2 ]∈ π
es una elipse de ecuación 2 2
2 2
(x h) (y k)1
a b
− −+ =
recorrida en sentido horario.

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 8 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
d. Parábola. La imagen de la función vectorial
f 2(t) (h 2pt,k pt ) , t R= + + ∈
es una parábola de ecuación 2(x h) 4p(y k)− = − con sentido de recorrido de izquierda a
derecha o de derecha a izquierda según p sea positivo o negativo respectivamente.
La imagen de la función vectorial
f 2(t) (t,at bt c) , t R= + + ∈
es una parábola de ecuación 2y ax bx c= + + con sentido de recorrido de menor a mayor
valor de la variable x.
La imagen de la función vectorial
f 2(t) (at bt c, t) , t R= + + ∈
es una parábola de ecuación 2x ay by c= + + con sentido de recorrido de menor a mayor
valor de la variable y.
e. Hipérbola. La imagen de la función vectorial f (t) (h acosh(t),k bsenh(t)), t R= + + ∈
es la rama derecha de la hipérbola de ecuación 2 2
2 2
(x h) (y k)1
a b
− −− = .
Observación 4. La ecuación cartesiana (en este caso la hipérbola) contiene más puntos
de los que generan las ecuaciones paramétricas planteadas.
La imagen de la función vectorial g
2 2(t) (h asec(t),k b t g(t)) , tπ π= + + − < <
también es la rama derecha de la hipérbola de ecuación 2 2
2 2
(x h) (y k)1
a b
− −− = .
La imagen de la función vectorial
f 2 2a(t) h b (t k) , t , t R
b = + + − ∈
es la rama derecha de la hipérbola de ecuación
2 2
2 2
(x h) (y k)1
a b
− −− =
con sentido de recorrido de menor a mayor valor de la variable y.
La imagen de la función vectorial
f 2 2a(t) h b (t k) , t , t R
b = − + − ∈
es la rama izquierda de la hipérbola de ecuación

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 9 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2 2
2 2
(x h) (y k)1
a b
− −− =
con sentido de recorrido de menor a mayor valor de la variable y.
La imagen de la función vectorial
f 2 2b(t) t,k a (t h) , t R
a = + + − ∈
es la rama superior de la hipérbola de ecuación 2 2
2 2
(x h) (y k)1
a b
− −− + =
con sentido de recorrido de menor a mayor valor de la variable x.
La imagen de la función vectorial
f 2 2b(t) t,k a (t h) , t R
a = − + − ∈
es la rama inferior de la hipérbola de ecuación 2 2
2 2
(x h) (y k)1
a b
− −− + =
con sentido de recorrido de menor a mayor valor de la variable x.
f. Cicloide. La cicloide es el lugar geométrico descrito por un punto P sobre una
circunferencia de radio a que gira sin deslizar sobre el eje x. La función vectorial cuya
imagen es la cicloide es f ( ) (a asen( ),a acos( )) , 0 2θ = θ − θ − θ ≤ θ ≤ π .
La ecuación rectangular de la cicloide es
2a yx aarccos 2ay y ,
a− = −
∓
en donde debe tomarse el signo positivo o el negativo según que θ sea menor o mayor
que π radianes en el arco comprendido entre 0θ = y 2θ = π .
g. Hélice. La hélice es la imagen de la función vectorial
fb
(t) r cos(t),rsen(t), t .2
= π
Las funciones coordenadas satisfacen la ecuación 2 2 2(x(t)) (y(t)) r+ = , ecuación de la
circunferencia; b2z(t) tπ= “levanta” el punto a altura b
2 tπ , por lo tanto la curva en 3R se
verá como en la figura 7. Cuando t aumenta la curva se recorre en sentido antihorario.
Observación 5. Recuerde que en cada curva para cambiar el sentido de recorrido debe cambiar el parámetro t por t− , adecuando el intervalo de recorrido.

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 10 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 7. Representación gráfica de la hélice
Ejemplo 7. Determine una parametrización de la curva dada por las ecuaciones
2 2
12
22
12
(x 2) (y 1) 4 1 y 3y (x 2) 0 y 1
xy 1 1 y 0
4y (x 2) 0 y 1
− + − = ≤ ≤
= + ≤ ≤
+ = − ≤ ≤ = − ≤ ≤
en sentido antihorario.
Solución. 2 2
1C :(x 2) (y 1) 4− + − = , 1 y 3≤ ≤ . 1r (t) (2 2cos(t),1 2sen(t))= + + , 0 t≤ ≤ π 1
2 2C : y (x 2)= + , 0 y 1≤ ≤ . 2r (s) (0 2s,1 s)= − −
0 s 1 s 1 t s s t≤ ≤ ⇒ π ≤ + π ≤ + π ⇒ = + π ⇒ = − π . 2r (t) ( 2(t ),1 t)= − − π + π − , t 1π < ≤ + π . 2
23
xC : y 1
4+ = , 1 y 0− ≤ ≤ . 3r (w) (2 cos(w),sen(w))=
w 2 1 1 w 1 2 t 1 w w t 1π ≤ ≤ π ⇒ + π ≤ + ≤ + π ⇒ = + ⇒ = −
3r (t) (2cos(t 1), sen(t 1))= − − , 1 t 1 2+ π < ≤ + π 1
4 2C : y (x 2)= − , 0 y 1≤ ≤ . 4r (z) (2 2z,0 z)= + +
0 z 1 1 2 1 2 z 2 2 t 1 2 z≤ ≤ ⇒ + π ≤ + π + ≤ + π ⇒ = + π +
4r (t) (2 2(t 1 2 ), t 1 2 )= + − − π − − π , 1 2 t 2 2+ π < ≤ + π
Por lo tanto
r
(2 2cos(t),1 2sen(t)) 0 t( 2t 2 ,1 t) t 1
(t)(2cos(t 1),sen(t 1)) 1 t 1 2
(2t 4 , t 1 2 ) 1 2 t 2 2
+ + ≤ ≤ π − + π + π − π < ≤ + π= − − + π < ≤ + π − π − − π + π < ≤ + π
.

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 11 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
La gráfica que corresponde es la que se muestra en la figura 8:
Figura 8. Representación gráfica de la curva del ejemplo 7
Ejemplo 8. 2y x 1 , 2 x 2= − − ≤ ≤ , de derecha a izquierda.
Solución.
Forma alternativa de presentar la curva: 2
2
2
y x 1 2 x 1
y 1 x 1 x 1
y x 1 1 x 2
= − − ≤ ≤ − = − − ≤ ≤ = − ≤ ≤
.
21C : y x 1 , 1 x 2= − ≤ ≤
1r 2a a
(a) , 1 4 a 2 0 a 4 2 t a 4 a t 42 4
= − − + − ≤ ≤ − ⇒ ≤ + ≤ ⇒ = + ⇒ = −
1r 2(t 4) (t 4)
(t) , 1 0 t 22 4
− −= − − + ≤ ≤
22C : y 1 x , 1 x 1= − − ≤ ≤
2r 2b 1(b) ,1 b 2 b 2 2 b 4 6 t b 4 b t 4
2 4 = − − − ≤ ≤ ⇒ ≤ + ≤ ⇒ = + ⇒ = −
2r 21 (t 4)
(t) t 2,1 2 t 62 4
−= − + − < ≤
23C : y x 1 , 2 x 1= − − ≤ ≤ −
3r 2c c
(c) ,1 2 c 4 6 c 4 8 t c 4 c t 42 4
= − − ≤ ≤ ⇒ ≤ + ≤ ⇒ = + ⇒ = −

PARAMETRIZACIÓN DE ALGUNAS CURVAS
Funciones Vectoriales de Variable Real Pág.: 12 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
3r 2(t 4) (t 4)
(t) ,1 6 t 82 4
− −= − − ≤ ≤
Por lo tanto
r
2
2
2
(t 4) (t 4), 1 0 t 2
2 4
1 (t 4)(t) t 2,1 2 t 6
2 4
(t 4) (t 4),1 6 t 8
2 4
− −− − + ≤ ≤ −= − + − < ≤
− − − − < ≤
Otra forma:
21C : y x 1 , 1 x 2= − ≤ ≤ , 1r 2(t) ( t, t 1) 2 t 1= − − − ≤ ≤ −
22C : y 1 x , 1 x 1= − − ≤ ≤ , 2r 2(t) ( t,1 t ) 1 t 1= − − − < ≤
23C : y x 1 , 2 x 1= − − ≤ ≤ − , 3r 2(t) ( t, t 1) 1 t 2= − − ≤ ≤
Por lo tanto
r
2
2
2
( t, t 1) 2 t 1
(t) ( t,1 t ) 1 t 1
( t, t 1) 1 t 2
− − − ≤ ≤ −= − − − < ≤ − − < ≤
La gráfica que corresponde es la que se muestra en la figura 9:
Figura 9. Representación gráfica de la curva del ejemplo 8

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 13 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.6. EJERCICIOS RESUELTOS
1. Sea R la región definida por
2
y x 2
y 4 x
≥ +
≤ −.
Determine una parametrización de la curva frontera de la región R en sentido horario.
Solución.
Una forma equivalente de definir la región R es 2y 4 x 1 x 1
y x 2 0 x 1y x 2 1 x 0
= − − ≤ ≤
= + ≤ ≤ = − + − ≤ ≤
.
Proceso de parametrización en el sentido indicado:
1 r 2 21C : y 4 x , 1 x 1 (t) (t,4 t ), 1 t 1= − − ≤ ≤ ⇒ = − − ≤ ≤
2
2
r
r 2C : y x 2, 0 x 1 (u) (1 u,3 u), 0 u 1 1 u 1 2 t u 1
(t) (2 t,4 t), 1 t 2
= + ≤ ≤ ⇒ = − − ≤ ≤ ⇒ ≤ + ≤ ⇒ = +⇒ = − − ≤ ≤
3
3
r
r 3C : y x 2, 1 x 0 (s) ( s,2 s), 0 s 1 2 s 2 3 t s 2
(t) (2 t, t), 2 t 3
= − + − ≤ ≤ ⇒ = − + ≤ ≤ ⇒ ≤ + ≤ ⇒ = +⇒ = − ≤ ≤
Una parametrización de la curva frontera de la región R en sentido horario es:
r
2(t, 4 t ) 1 t 1(t) (2 t,4 t) 1 t 2
(2 t, t) 2 t 3
− − ≤ ≤
= − − < ≤ − < ≤
.
Al graficar la región R se tiene (ver figura 10):
Figura 10. Representación gráfica de la curva del ejercicio 1

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 14 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2. Sea la curva dada por 2
2
2 2
(y 2)(x 1) 1 2 y 4
4y 2(x 1) 0 y 2
x y 1 1 y 0y 2(x 1) 0 y 2
−− + = ≤ ≤ = + ≤ ≤ + = − ≤ ≤ = − ≤ ≤
.
Determine una parametrización en sentido antihorario.
Solución.
Gráfica de la curva (ver figura 11):
1r 1C : (t) (1 cos(t),2 2sen(t)) , 0 t= + + ≤ ≤ π
2
2
r
r 2C : (s) ( s,2 2s) , 0 s 1 s 1 t 1 s t
(t) ( t,2 2(t )) , t 1
= − − ≤ ≤ π ≤ + π ≤ + π ⇒ π ≤ ≤ + π ⇒ = − π= π − − − π π ≤ ≤ + π
3
3
r ,
r 3C : (u) (cos(u),sen(u)) u 2 1 u 1 1 2 1 t 1 2 u t 1
(t) (cos(t 1),sen(t 1)) , 1 t 1 2
= π ≤ ≤ π + π ≤ + ≤ + π ⇒ + π ≤ ≤ + π ⇒ = −= − − + π ≤ ≤ + π
4
4
r ,
r
4C : (s) (1 s,2s) 0 s 1
1 2 s 2 1 2 2 1 2 t 2 2 s t 2 1(t) (1 t 2 1,2(t 2 1)) , 1 2 t 2 2
= + ≤ ≤+ π ≤ + π + ≤ + π ⇒ + π ≤ ≤ + π ⇒ = − π −
= + − π − − π − + π ≤ ≤ + π
Figura 11. Representación gráfica de la curva del ejercicio 2
En conclusión se tiene
r
(1 cos(t),2 2sen(t)) 0 t( t,2 2(t )) t 1
(t)(cos(t 1),sen(t 1)) 1 t 1 2
(1 t 2 1,2(t 2 1)) 1 2 t 2 2
+ + ≤ ≤ π π − − − π π < ≤ + π= − − + π < ≤ + π + − π − − π − + π < < + π
.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 15 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
3. Determine una parametrización en sentido antihorario y obtenga el gráfico de la curva
2 2
2
x y 4 2 x 4
y 2 3 0 2 x 4
yx 2 4 2 3 y 2 3
3
− = ≤ ≤ − = − ≤ ≤
= − + − − ≤ ≤
.
Solución. r 1 1C : (t) (2sec(t),2tg(t)) , / 3 t / 3= − π ≤ ≤ π
r
r ,
2 2
2
C : (s) (4 6s, 2 3) , 0 s 1
/3 s /3 1 /3 /3 t 1 /3 s t /3
(t) (4 6(t / 3), 2 3) /3 t 1 /3
= − − ≤ ≤π ≤ + π ≤ + π ⇒ π ≤ ≤ + π ⇒ = − π
= − − π − π ≤ ≤ + π
r
r
3 3
3
C : (u) ( 2 2cos(u), 2 3sen(u)) , / 2 u / 2
/ 2 1 5 / 6 u 1 5 / 6 / 2 5 / 6 1 u t 1 5 / 6
(t) ( 2 2cos(t 1 5 / 6), 2 3sen(t 1 5 / 6)) , 1 / 3 t 1 4 / 3
= − + − − π ≤ ≤ π− π + + π ≤ + + π ≤ π + π + ⇒ = − − π
= − + − − π − − − π + π ≤ ≤ + π
r
r
4 4
4
C : (w) ( 2 6w,2 3) , 0 w 1
1 4 /3 w 1 4 /3 2 4 /3 w t 4 /3 1
(t) ( 2 6(t 4 /3 1),2 3) , 1 4 /3 t 2 4 /3
= − + ≤ ≤+ π ≤ + + π ≤ + π ⇒ = − π −
= − + − π − + π ≤ ≤ + π
En conclusión se tiene
r
(2sec(t),2tg(t)) / 3 t / 3
(4 6(t / 3), 2 3) / 3 t 1 / 3(t)
( 2 2cos(t 1 5 / 6), 2 3sen(t 1 5 / 6)) 1 / 3 t 1 4 / 3
( 2 6(t 4 / 3 1,2 3) 1 4 / 3 t 2 4 / 3
−π ≤ ≤ π
− − π − π < ≤ + π= − + − − π − − − π + π < ≤ + π
− + − π − + π < < + π
.
El gráfico se presenta a continuación en la figura 12:
Figura 12. Representación gráfica de la curva del ejercicio 3

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 16 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
4. Determine una parametrización en sentido antihorario y obtenga el gráfico de la curva
2 2
2
2
x y 1 1 x 0y x 1 0 0 x 3
3 4 (y 2)x 2 y 4
2
x y 5y 4 1 y 4
+ = − ≤ ≤
− + = ≤ ≤
− −= ≤ ≤
= − + ≤ ≤
.
Solución.
Curva 1: 2 2x y 1 , 1 x 0+ = − ≤ ≤ .
1r 32 2(A) (cos(A),sen(A)) , Aπ π= ≤ ≤ .
Curva 2: y x 1 0 , 0 x 3− + = ≤ ≤ .
2r (B) (3B, 1 3B) , 0 B 1= − + ≤ ≤ .
Curva 3: 23 4 (y 2)
x , 2 y 42
− −= ≤ ≤ .
3r 2(C) (3cos(C),2 2sen(C)) , 0 C π= + ≤ ≤ .
Curva 4: 2x y 5y 4 , 1 y 4= − + ≤ ≤ . 25 92 4x (y ) , 1 y 4= − − + ≤ ≤
4r 2 9 5 3 34 2 2 2(D) ( D , D) , D= − + − − ≤ ≤ .
Usando un solo parámetro se tiene: C1: 2 2x y 1 , 1 x 0+ = − ≤ ≤ .
1r 32 2(t) (cos(t), sen(t)) , tπ π= ≤ ≤ .
C2: y x 1 0 , 0 x 3− + = ≤ ≤ .
2r 3 3 3 32 2 2 2(t) (3(t ), 1 3(t )) , t 1π π π π= − − + − ≤ ≤ + .
C3: 23 4 (y 2)
x , 2 y 42
− −= ≤ ≤ .
3r 3 3 32 2 2(t) (3cos(t 1 ),2 2sen(t 1 )) , 1 t 1 2π π π= − − + − − + ≤ ≤ + π .
C4: 2x y 5y 4 , 1 y 4= − + ≤ ≤ .
4r 25 9 5 52 4 2 2(t) ( (t 2 ) , (t 2 )) , 1 2 t 4 2= − − π − + − − π − + π ≤ ≤ + π .
Por tanto:
1
2
3
4
r
rr
r
r
32 2
3 32 2
32
(t) t
(t) t 1(t)
(t) 1 t 1 2
(t) 1 2 t 4 2
π π
π π
π
≤ ≤
≤ ≤ +=
+ ≤ ≤ + π + π ≤ ≤ + π
.
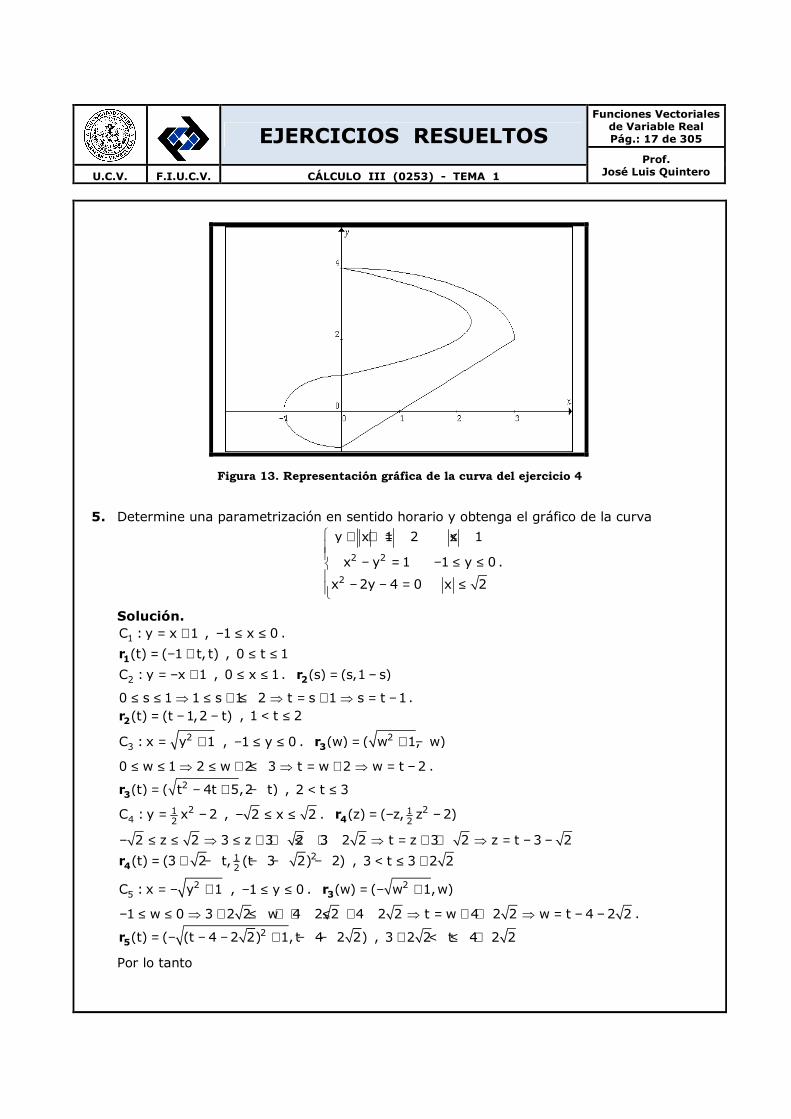
Su gráfico se muestra a continuación en la figura 13.
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 17 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 13. Representación gráfica de la curva del ejercicio 4
5. Determine una parametrización en sentido horario y obtenga el gráfico de la curva
2 2
2
y x 1 2 x 1
x y 1 1 y 0
x 2y 4 0 x 2
+ + = ≤ − = − ≤ ≤ − − = ≤
.
Solución.
1C : y x 1= + , 1 x 0− ≤ ≤ .
1r (t) ( 1 t, t)= − + , 0 t 1≤ ≤
2C : y x 1= − + , 0 x 1≤ ≤ . 2r (s) (s,1 s)= −
0 s 1 1 s 1 2 t s 1 s t 1≤ ≤ ⇒ ≤ + ≤ ⇒ = + ⇒ = − .
2r (t) (t 1,2 t)= − − , 1 t 2< ≤
23C : x y 1= + , 1 y 0− ≤ ≤ . 3r
2(w) ( w 1, w)= + −
0 w 1 2 w 2 3 t w 2 w t 2≤ ≤ ⇒ ≤ + ≤ ⇒ = + ⇒ = − .
3r2(t) ( t 4t 5,2 t)= − + − , 2 t 3< ≤ 21
4 2C : y x 2= − , 2 x 2− ≤ ≤ . 4r
212
(z) ( z, z 2)= − −
2 z 2 3 z 3 2 3 2 2 t z 3 2 z t 3 2− ≤ ≤ ⇒ ≤ + + ≤ + ⇒ = + + ⇒ = − −
4r21
2(t) (3 2 t, (t 3 2) 2)= + − − − − , 3 t 3 2 2< ≤ +
25C : x y 1= − + , 1 y 0− ≤ ≤ . 3r
2(w) ( w 1,w)= − +
1 w 0 3 2 2 w 4 2 2 4 2 2 t w 4 2 2 w t 4 2 2− ≤ ≤ ⇒ + ≤ + + ≤ + ⇒ = + + ⇒ = − − .
5r2(t) ( (t 4 2 2) 1, t 4 2 2)= − − − + − − , 3 2 2 t 4 2 2+ < ≤ +
Por lo tanto

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 18 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
r2
212
2
(t 1, t) 0 t 1(t 1,2 t) 1 t 2
( t 4t 5,2 t) 2 t 3(t)(3 2 t, (t 3 2) 2) 3 t 3 2 2
( (t 4 2 2) 1, t 4 2 2) 3 2 2 t 4 2 2
− ≤ ≤ − − < ≤ − + − < ≤= + − − − − < ≤ +
− − − + − − + < ≤ +
.
La gráfica que corresponde es la que se muestra en la figura 14:
Figura 14. Representación gráfica de la curva del ejercicio 5
6. Una curva C está definida por
2 22
y cos(x) x ,4 2
2 2y x x 0,
4
x y y ,04 16 4
π π = ∈
π = ∈ π π π π − + = ∈ −
.
Parametrice la curva C en sentido antihorario.
Solución.
Proceso de parametrización en el sentido indicado:
1 r 1 4 2 2 4C : y cos(x), x (t) ( t,cos(t)), tπ π π π= ≤ ≤ ⇒ = − − ≤ ≤ −
2
2
r
r
2 2 2 22 4 4 4 2 2
4 4 4 4
2 24 4 4 2 2 4 4 4
C : y x, 0 x (u) ( u, u), 0 u 1
u 1 t u
(t) ( (t ), (t )), t 1
π π ππ
π π π π
π π π π π π
= ≤ ≤ ⇒ = − − ≤ ≤
⇒ − ≤ − ≤ − ⇒ = −
⇒ = − + − + − ≤ ≤ −
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 19 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
3
3
r
r
22 23 4 16 4 4 4 4
5 3 54 4 4 4
5 54 4 4 4 4
C :(x ) y , y 0 (s) ( cos(s), sen(s)),
s 2 1 s 1 1 t s 1
(t) ( cos(t 1 ), sen(t 1 )),
π π π π π π
π π π π
π π π π π
− + = − ≤ ≤ ⇒ = +
π ≤ ≤ π ⇒ − ≤ + − ≤ + ⇒ = + −
⇒ = + − + − + 34 4
1 t 1π π− ≤ ≤ +
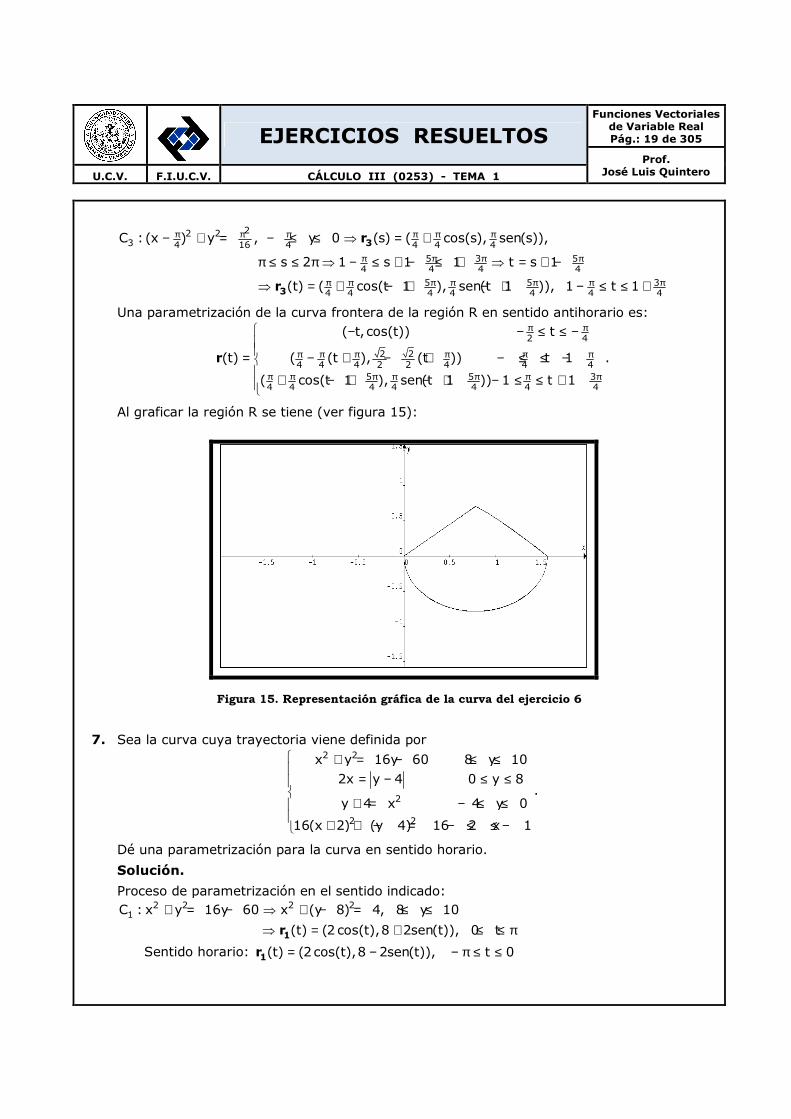
Una parametrización de la curva frontera de la región R en sentido antihorario es:
r
2 4
2 24 4 4 2 2 4 4 4
5 5 34 4 4 4 4 4 4
( t, cos(t)) t
(t) ( (t ), (t )) t 1
( cos(t 1 ), sen(t 1 )) 1 t 1
π π
π π π π π π
π π π π π π π
− − ≤ ≤ −= − + − + − ≤ ≤ − + − + − + − ≤ ≤ +
.
Al graficar la región R se tiene (ver figura 15):
Figura 15. Representación gráfica de la curva del ejercicio 6
7. Sea la curva cuya trayectoria viene definida por 2 2
2
2 2
x y 16y 60 8 y 102x y 4 0 y 8
y 4 x 4 y 0
16(x 2) (y 4) 16 2 x 1
+ = − ≤ ≤
= − ≤ ≤
+ = − ≤ ≤ + + − = − ≤ ≤ −
.
Dé una parametrización para la curva en sentido horario.
Solución.
Proceso de parametrización en el sentido indicado: 2 2 2 2
1C : x y 16y 60 x (y 8) 4, 8 y 10
(t) (2 cos(t),8 2sen(t)), 0 t
+ = − ⇒ + − = ≤ ≤⇒ = + ≤ ≤ π1
r
Sentido horario: 1r (t) (2cos(t),8 2sen(t)), t 0= − − π ≤ ≤

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 20 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2 32x y 4 4 y 8
C ,C :2x y 42x y 4 0 y 4
(s) (2,8) s( 2, 4) (2 2s,8 4s) , 0 s 1(w) (0,4) w(2, 4) (2w,4 4w) , 0 w 1
(t) (2 2t,8 4t) , 0 t 1 0 w 1 1 w 1 2 1 t 2
= − ≤ ≤= − ⇒ = − + ≤ ≤
= + − − = − − ≤ ≤⇒
= + − = − ≤ ≤= − − ≤ ≤ ≤ ≤ ⇒ ≤ + ≤ ⇒ ≤ ≤
2
3
2
r
r
r
t w 1 w t 1⇒ = + ⇒ = −
3 r (t) (2(t 1),4 4(t 1)) (2t 2,8 4t) , 1 t 2= − − − = − − ≤ ≤ 2 2 2
4
2
C : y 4 x y x 4, 4 y 0 (v) (v,v 4), 2 v 2
Sentido horario : (v) ( v,v 4), 2 v 2 2 v 4 6
t v 4 v t 4
+ = ⇒ = − − ≤ ≤ = − − ≤ ≤
= − − − ≤ ≤ ⇒ ≤ + ≤⇒ = + ⇒ = −
4
4
r
r
4 r 2(t) ( (t 4),(t 4) 4), 2 t 6= − − − − ≤ ≤
5
r
22 2 2
5
2 2 2
2 2
(y 4)C :16(x 2) (y 4) 16 (x 2) 1, 2 x 1
16(u) ( 2 cos(u),4 4sen(u)), u 6 u 6 6
t u 6 u t 6
π π π
π π
−+ + − = ⇒ + + = − ≤ ≤ −
= − + + − ≤ ≤ ⇒ ≤ + + ≤ + π
⇒ = + + ⇒ = − −
5 r 2 2
(t) ( 2 cos(t 6 ),4 4sen(t 6 )), 6 t 6π π= − + − − + − − ≤ ≤ + π
Una parametrización de la curva en sentido horario es:
r2
2 2
(2 cos(t),8 2sen(t)) t 0(2 2t,8 4t) 0 t 1(2t 2,8 4t) 1 t 2(t)
( (t 4),(t 4) 4) 2 t 6( 2 cos(t 6 ),4 4sen(t 6 )) 6 t 6π π
− −π ≤ ≤ − − ≤ ≤ − − ≤ ≤= − − − − ≤ ≤ − + − − + − − ≤ ≤ + π
.
Al graficar la curva se tiene (ver figura 16):
Figura 16. Representación gráfica de la curva del ejercicio 7

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 21 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
8. Una curva C está definida por
2 2
y sen(x) x 0,
2y x 2 x 0,
x (y 1) 1 x 1,0
= ∈ π = − ∈ π π + + = ∈ −
.
Parametrice la curva C en sentido horario.
Solución.
Proceso de parametrización en el sentido indicado:
1 r 1C : y sen(x), 0 x (t) (t,sen(t)), 0 t= ≤ ≤ π ⇒ = ≤ ≤ π
2
2
r
r
22C : y x 2, 0 x (u) ( u , 2u), 0 u 1 u 1 t u
(t) ( (t ) , 2(t )), t 1π= − ≤ ≤ π ⇒ = π − π − ≤ ≤ ⇒ π ≤ + π ≤ + π ⇒ = + π
⇒ = π − − π π − − π π ≤ ≤ + π
3
3
r
r
2 23
3 5 52 2 2 2
5 52 2
C : x (y 1) 1, 1 x 0 (s) (cos(s), 1 sen(s)),
s 1 s 1 1 2 t s 1
(t) (cos(t 1 ), 1 sen(t 1 )), 1 t 1 2
π π π π
π π
+ − = − ≤ ≤ ⇒ = − −
− ≤ ≤ − ⇒ + π ≤ + + ≤ + π ⇒ = + +
⇒ = − − − − − − + π ≤ ≤ + π
Una parametrización de la curva frontera de la región R en sentido horario es:
r5 52 2
(t,sen(t)) 0 t(t) ( (t ) , 2(t )) t 1
(cos(t 1 ), 1 sen(t 1 )) 1 t 1 2π π
≤ ≤ π= π − − π π − − π π ≤ ≤ + π − − − − − − + π < ≤ + π
.
Al graficar la región R se tiene (ver figura 7):
Figura 17. Representación gráfica de la curva del ejercicio 8

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 22 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
9. Una curva C está definida por
2 2
y tg(x) x 0,4
(x 1) y 1 y 1,0
4y (x 2) y 0,1
8
π = ∈
− + = ∈ − = − ∈ π −
.
Parametrice la curva C en sentido antihorario.
Solución.
Proceso de parametrización en el sentido indicado:
1 r 1 4 4C : y tg(x), 0 x (t) ( t, tg(t)), t 0π π= ≤ ≤ ⇒ = − − − ≤ ≤
2
2
r
r
2 22C :(x 1) y 1, 1 y 0 (s) (1 cos(s), sen(s)),
s 2 0 s t s(t) (1 cos(t ),sen(t )), 0 t
− + = − ≤ ≤ ⇒ = +π ≤ ≤ π ⇒ ≤ − π ≤ π ⇒ = − π⇒ = + + π + π ≤ ≤ π
3
3
r
r
43 8 4
4
C : y (x 2), 0 y 1 (u) (2 u( 2),u), 0 u 1
u 1 t u
(t) (2 (t )( 2), t ), t 1
ππ−
π
= − ≤ ≤ ⇒ = + − ≤ ≤
⇒ π ≤ + π ≤ + π ⇒ = + π
⇒ = + − π − − π π ≤ ≤ + π
Una parametrización de la curva frontera de la región R en sentido antihorario es:
r4
4
( t, tg(t)) t 0
(t) (1 cos(t ),sen(t )) 0 t(2 (t )( 2), t ) t 1
π
π
− − − ≤ ≤= + + π + π ≤ ≤ π + − π − − π π ≤ ≤ + π
.
Al graficar la región R se tiene (ver figura 18):
Figura 18. Representación gráfica de la curva del ejercicio 9

GRÁFICA DE CURVAS PARAMÉTRICAS CON GRAPHMATICA
Funciones Vectoriales de Variable Real Pág.: 23 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.7. GRÁFICA DE CURVAS PARAMÉTRICAS CON GRAPHMATICA
La gráfica de curvas dadas en forma paramétrica es sencilla usando el graficador
Graphmatica. Si se quiere graficar la circunferencia de ecuación 2 2x y 9+ = , se deben indicar
sus ecuaciones paramétricas y el intervalo del parámetro tome los valores. En este caso: { } x 3 * cos(t); y 3 * sin(t) 0,2 *pi= =
El ambiente de trabajo de Graphmatica puede apreciarse en la figura 19. Para buscar
aspectos generales del uso de Graphmatica ingrese en la dirección www.joseluisquintero.com y
en el link docencia en la asignatura Cálculo III descargar el archivo.pdf correspondiente.
Figura 19. Ambiente de trabajo de Graphmatica
1.8. LONGITUD, MAGNITUD O NORMA DE UN VECTOR
Definición 5. La longitud, magnitud o norma de un vector es una cantidad escalar
asociada con el tamaño del vector y se puede calcular como
x 2 2 21 2 nx x ... x= + + + .

LONGITUD, MAGNITUD O NORMA DE UN VECTOR
Funciones Vectoriales de Variable Real Pág.: 24 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
El teorema de Pitágoras se puede usar para calcular la longitud de un vector fijo en R3
(ver figura 20). Si P (x, y,z)= , del teorema de Pitágoras se tiene que
OP OR2 2 2z= + ,
aplicando el teorema de Pitágoras al vector OR se obtiene
OR 2 2 2x y= +
y reemplazando esta última ecuación en la primera:
OR 2 2 2 2x y z= + + .
Como la norma de un vector es no negativa se tiene que
P OP 2 2 2x y z= = + + .
TEOREMA 1. (PROPIEDADES DE LA NORMA) a. x x 00= ⇔ =
b. x x 00> ⇔ ≠
c. x xλ = λ ( λ escalar real)
d. x y x y+ ≤ + (Desigualdad triangular)
Observación 6. x se dice unitario si y sólo si x 1= .
TEOREMA 2. Sea x nR ,∈ entonces xx
es unitario.
Figura 20. Norma de un vector en tres dimensiones usando el teorema de Pitágoras

PRODUCTO ESCALAR Funciones Vectoriales
de Variable Real Pág.: 25 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.9. PRODUCTO ESCALAR
Definición 6. Dados los vectores x 1 2 n(x ,x ,..., x )= y y 1 2 n(y ,y ,..., y )= se define el producto
escalar x y,• por
x yn
1 1 n n i ii 1
x y ... x y x y=
• = + + =∑ .
TEOREMA 3. (PROPIEDADES DEL PRODUCTO ESCALAR) a. x y y x• = •
b. x y x y( ) ( )λ • = λ •
c. x y z x y x z( )• + = • + •
d. x x 0• ≥
e. x x x 00• = ⇔ =
Observación 7. x x x• = .
1.10. ÁNGULO ENTRE DOS VECTORES
Definición 7. Sean A y B dos vectores de R3 o R2 no nulos, el ángulo θ entre los vectores
coordenados A y B es el ángulo entre los vectores fijos OA y OB y donde θ es un ángulo
entre 0� y 180� .
TEOREMA 4. Si A y B son vectores coordenados de R3 no nulos, entonces 2 2 2
cos( )2
+ − −θ =
A B B A
A B.
Demostración.
Por la ley de los cosenos se tiene que 2 2 2
2 cos( )− = + − θB A A B A B .
(ver figura 21)
De modo que 2 2 2
cos( )2
+ − −θ =
A B B A
A B.

ÁNGULO ENTRE DOS VECTORES
Funciones Vectoriales de Variable Real Pág.: 26 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Demostración.
Figura 21. Ángulo entre dos vectores usando la norma de vectores
Si A 1 2 3(a ,a ,a )= y B 1 2 3(b ,b ,b )= son vectores de R3, entonces
B A
B A
2 2 2 21 1 2 2 3 3
2 2 2 2 2 21 2 3 1 2 3 1 1 2 2 3 3
2 21 1 2 2 3 3
(b a ) (b a ) (b a )
(b b b ) (a a a ) 2(b a b a b a )
2(b a b a b a )
− = − + − + −
= + + + + + − + +
= + − + +
Reemplazando se tiene que 2 2 2 2
1 1 2 2 3 3 1 1 2 2 3 32(b a b a b a ) (b a b a b a )cos( )
2
+ − − + + + + + •θ = = =A B B A A B
A B A B A B
□
1.11. PRODUCTO VECTORIAL
Considere el problema de encontrar un vector X (x,y,z)= perpendicular a dos vectores
no nulos y no paralelos A 1 2 3(a ,a ,a )= y B 1 2 3(b ,b ,b )= . Como A X B X 0• = • = , el problema
se reduce a la solución del sistema de ecuaciones dado por
1 2 3
1 2 3
a x a y a z 0
b x b y b z 0
+ + =+ + =
.
Se puede eliminar z multiplicando la primera ecuación por 3b y la segunda por 3a− y
luego sumándolas se obtiene
1 3 3 1 2 3 3 2(a b a b )x (a b a b )y 0− + − = (*)

PRODUCTO VECTORIAL Funciones Vectoriales
de Variable Real Pág.: 27 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
De forma semejante, se puede eliminar y y
1 2 2 1 3 2 2 3(a b a b )x (a b a b )z 0− + − = (**)
Se ve fácilmente que para cualquier constante k,
2 3 3 2x k(a b a b )= − , 3 1 1 3y k(a b a b )= − , 1 2 2 1z k(a b a b )= −
es una solución para el sistema formado por (*) y (**). Como se puede ver hay infinitas
soluciones a este sistema todas ellas múltiplos escalares. Cuando k 1= la solución se define
como el producto vectorial A B× . Por lo anterior, A B× es un vector perpendicular tanto a A
como a B (ver figura 22).
Figura 22. Producto vectorial de dos vectores
Definición 8. Para cualquier par de vectores A y B de R3 el producto vectorial de A por B se
define como A B 2 3 3 2 3 1 1 3 1 2 2 1(a b a b ,a b a b ,a b a b )× = − − − .
Observación 8.
a. Si A o B es el vector nulo, entonces es claro que A B 0× = .
b. Si A o B no son nulos y A es paralelo a B, entonces B A= λ para algún escalar λ , por
tanto

PRODUCTO VECTORIAL Funciones Vectoriales
de Variable Real Pág.: 28 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
A B A A
1 2 3 1 2 3
2 3 3 2 3 1 1 3 1 2 2 1
2 3 3 2 3 1 1 3 1 2 2 1
( ) (a ,a ,a ) ( a , a , a )
(a ( a ) a ( a ),a ( a ) a ( a ),a ( a ) a ( a ))
( a a a a , a a a a , a a a a ) (0,0,0)
× = × λ = × λ λ λ= λ − λ λ − λ λ − λ= λ − λ λ − λ λ − λ =
Se tiene entonces que si A B× son vectores paralelos entonces A B 0× = . Usando
determinantes se tiene que i j k
A B 1 2 3
1 2 3
a a ab b b
× = .
TEOREMA 5. (PROPIEDADES DEL PRODUCTO VECTORIAL) Sean A, B y C vectores de R3 y λ un número real.
a. A A 0× =
b. 0 A A 0 0× = × =
c. B A A B× = − × d. A B C A B A C( )× + = × + ×
e. A B A B A B( ) ( ) ( )λ × = λ × = × λ
Observación 9. El producto cruz o vectorial en general no cumple la propiedad asociativa, es
decir, A B C A B C( ) ( )× × ≠ × × .
Relacionando al producto vectorial con el producto escalar se tiene
A B A B A B2 2 22( )× + • = .
(Identidad de Lagrange)
TEOREMA 6. Si A y B son vectores de R3 y θ es el ángulo entre los vectores A y B, entonces
sen( )× = θA B A B .
Demostración.
A B A B A B A B A B A B
A B
2 2 2 2 2 2 2 2 22 2 2
2 2 2
( ) cos ( ) (1 cos ( ))
sen ( )
× = − • = − θ = − θ
= θ
De modo que sen( )× = θA B A B .
□

PRODUCTO VECTORIAL Funciones Vectoriales
de Variable Real Pág.: 29 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
La fórmula anterior para A B× tiene una interpretación geométrica para lo cual se
construirá el paralelogramo determinado por A y B (ver figura 23). El área de dicho paralelogramo es base por la altura, donde la base es A y la altura es sen( )θB , entonces el
área del paralelogramo es sen( )× = θA B A B .
Para el cálculo del área de un triángulo de vértices a, b y c se tiene que
AB AC12ÁREA = × .
Figura 23. Aplicación geométrica del producto vectorial
1.12. LÍMITE DE UNA FUNCIÓN VECTORIAL
El límite de una función vectorial en un punto 0t de su dominio es una simple
extensión vectorial del límite de una función real.
TEOREMA 7. Sea r 1 n(t) (r (t),...,r (t))= , r L 1 nt t0
lím (t) (l ,...,l )→
= = si y sólo si i it t0lím r(t) l→
= .
A efectos de cálculo, se evalúa el límite coordenada a coordenada, es decir.
r 1 nt t t t t t0 0 0lím (t) lím r (t),..., lím r (t)→ → →
=
.

LÍMITE DE UNA FUNCIÓN VECTORIAL
Funciones Vectoriales de Variable Real Pág.: 30 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 9. Si
r 2 sen(t)(t) t , t,
t =
,
se tiene
r 2
t 0 t 0 t 0 t 0
sen(t)lím (t) lím t , lím t, lím (0,0,1)
t→ → → →
= =
.
TEOREMA 8. Si f(t) y g(t) son funciones vectoriales de una variable real tales que f b
t t0l í m (t)→
= y g ct t0l í m (t)→
= ,
entonces:
a. f g f g b c
t t t t t t0 0 0l í m[ (t) (t)] l í m (t) lí m (t)→ → →
± = ± = + .
b. f g f g b ct t t t t t0 0 0l í m( (t) (t)) lí m (t) lí m (t)→ → →
• = • = • .
c. f g f g b ct t t t t t0 0 0l í m( (t) (t)) lí m (t) lí m (t)→ → →
× = × = × (para 3R solamente)
1.13. CONTINUIDAD DE UNA FUNCIÓN VECTORIAL
Definición 9. Sea r0t D( )∈ . Se dirá que r es continua en 0t si y sólo si
r r 0t t0lím (t) (t )→
= .
Ejemplo 10. Estudie la continuidad de
r
2 sen(t)t , t, si t 0
(t) t
(0,0,0) si t 0
≠ = =
.
Solución.
r r2
t 0 t 0
sen(t)lím (t) lím t , t, (0,0,1) (0)
t→ →
= = ≠
,
por lo tanto la función no es continua en 0t 0= .
TEOREMA 9. La función r es continua en 0t si y sólo si sus funciones coordenadas ir son
continuas en 0t .

DERIVADA DE UNA FUNCIÓN VECTORIAL
Funciones Vectoriales de Variable Real Pág.: 31 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.14. DERIVADA DE UNA FUNCIÓN VECTORIAL
La derivada se define en forma similar a la de funciones reales de variable real.
Definición 10. Se define la derivada de r en 0t , denotada por r 0'(t ) o bien por rd
0dt (t ) ,
como el límite: r r
r
0 0 1 0 1 0 n 0 n 00 h 0 h 0
' '1 0 1 0 n 0 n 01 0 n 0h 0 h 0
(t h) (t ) r (t h) r (t ) r (t h) r (t )'(t ) lím lím ,...,
h h h
r (t h) r (t ) r (t h) r (t )lím ,..., lím (r (t ),...,r (t )).
h h
→ →
→ →
+ − + − + − = =
+ − + − = =
Ejemplo 11. Siendo r(t) (2cos(t),2sen(t))= se tiene r '(t) ( 2sen(t),2 cos(t)).= −
TEOREMA 10. Sean f(t) y g(t) funciones vectoriales de variable real, derivables, y (t)α una
función real de variable real, entonces: a. f g f g( (t) (t))' '(t) '(t)± = ±
b. f f f( (t) (t))' '(t) (t) (t) '(t)α = α + α
c. f g f g f g( (t) (t))' (t) '(t) '(t) (t)• = • + •
d. f g f g f g( (t) (t))' (t) '(t) '(t) (t)× = × + × (para 3R solamente)
1.15. INTERPRETACIÓN GEOMÉTRICA Y FÍSICA DE LA DERIVADA
Se dice que r 0'(t ) es el vector director de la recta tangente a la curva r(t) en el punto
0t . La ecuación de la recta tangente a r(t) en 0t viene dada por
f r r 0 0( ) (t ) '(t ) , Rα = + α α ∈ .
Ejemplo 12. Calcula la ecuación de la recta tangente a la curva r(t) (acos(t),asen(t))= en el
punto r 4( )π .
Solución.
( ) ( )r r2 2 2 24 2 2 4 2 2( ) a, a y '( ) a, aπ π= = − ,
por lo tanto la recta tangente tiene ecuación vectorial:

INTEPRETACIÓN GEOMÉTRICA Y FÍSICA DE LA DERIVADA
Funciones Vectoriales de Variable Real Pág.: 32 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
( ) ( )f 2 2 2 2
2 2 2 2( ) a, a a, a , R.α = + α − α ∈
Si el parámetro t es el tiempo y r(t) es la posición instantánea de un cuerpo entonces: La velocidad instantánea es v r(t) '(t)= .
La rapidez instantánea es vv(t) (t)= .
La aceleración instantánea es a r(t) ''(t).=
1.16. INTEGRAL DE UNA FUNCIÓN VECTORIAL
Definición 11. Sea r 1 n(t) (r (t),...,r (t)).= Se define la integral de r(t) sobre [a,b] como
rb b b
1 na a a
(t)dt r (t)dt,..., r (t)dt . =
∫ ∫ ∫
Ejemplo 13. El vector posición de una partícula viene dado por r(t) (sen(t),3cos(t),2).=
a. Elimine el parámetro t, dé una ecuación en coordenadas cartesianas que relacione las
componentes de r e identifique la curva obtenida.
Solución.
2 29x y 9 , z 2+ = = elipse.
b. Calcule
c r/2
0
( (t))dtπ
•∫
donde c (1,0,3)= .
Solución.
/2/2
00
(6 sen(t))dt 6t cos(t) 1 3π
π+ = − = + π∫ .
1.17. LONGITUD DE ARCO
Definición 12. Sea C la curva definida por r(t) en un intervalo abierto I, tal que r '(t) existe y
sea continua en I. Si la curva C satisface las hipótesis anteriores entonces la longitud de
curva comprendida entre r(a) y r(t) está dada por

LONGITUD DE ARCO Funciones Vectoriales
de Variable Real Pág.: 33 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
rt
a
s(t) '( ) d= α α∫ .
Ejemplo 14. Calcule la longitud de una circunferencia de radio a.
Solución. Una parametrización para la circunferencia es r(t) (acos(t),asen(t))= con 0 t 2≤ ≤ π .
Luego r '(t) ( asen(t),acos(t))= − y su longitud será:
r2 2 2
2 2
0 0 0
s '(t) dt ( asen(t)) (acos(t)) dt a dt 2 aπ π π
= = − + = = π∫ ∫ ∫ .
Definición 13. Dada una curva r(t), se puede reparametrizar usando s como parámetro; se
llama a ésta la parametrización intrínseca de la curva.
Ejemplo 15. La curva r(t) (3cos(t),3sen(t),4t)= es una hélice, reparametrizarla en función
de la longitud de arco.
Solución.
rt t t
2 2
0 0 0
s(t) '( ) d 9sen ( ) 9cos ( ) 16d 5 d 5t= α α = α + α + α = α =∫ ∫ ∫ ,
de modo que t s /5= . Por lo tanto en función de la longitud de arco se tiene la función
vectorial
rs s 4
(s) 3cos ,3sen , s5 5 5
=
.
TEOREMA 11. Si r(s) es la parametrización intrínseca de una curva C entonces r '(s) 1= .
Demostración. Sea 1s (t) h(t)− = . Si r r(s) (h(t))= , entonces
r r'(s) '(h(t))h'(t).=
Se sabe que 1s(s (t)) t− = , entonces 1 1s '(s (t))(s (t))' 1− − = ,
se obtiene en consecuencia
r1
1
1 1h'(t) (s (t))'
'(h(t))s '(s (t))−
−= = = .
Por lo tanto r
r rr'(h(t))
'(s) '(s) 1'(h(t))
= ⇒ = .
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 34 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.18. EJERCICIOS RESUELTOS
1. Sean a 0≠ , a b a c• = • y a b a c× = × . ¿Se puede concluir que b c= ?
Solución. Sean a b c1 2 3 1 2 3 1 2 3(a ,a ,a ) , (b ,b ,b ) , (c ,c , c ).= = =
a b a c
1 1 2 2 3 3 1 1 2 2 3 3
1 1 1 2 2 2 3 3 3
a b a b a b a c a c a c
a (b c ) a (b c ) a (b c ) 0
• = • ⇒ + + = + +⇒ − + − + − =
a b a c
2 3 3 2 3 1 1 3 1 2 2 1 2 3 3 2 3 1 1 3 1 2 2 1
2 3 3 3 2 2 3 1 1 1 3 3 1 2 2 2 1 1
(a b a b ,a b a b ,a b a b ) (a c a c ,a c a c ,a c a c )
(a (b c ) a (b c ),a (b c ) a (b c ),a (b c ) a (b c ))
(0,0,0)
× = × ⇒ − − − = − − −⇒ − − − − − − − − −=
Sea el sistema de ecuaciones
1 1 1 2 2 2 3 3 3
2 3 3 3 2 2
3 1 1 1 3 3
1 2 2 2 1 1
a (b c ) a (b c ) a (b c ) 0
a (b c ) a (b c ) 0
a (b c ) a (b c ) 0
a (b c ) a (b c ) 0
− + − + − =− − − =− − − =− − − =
.
Si se suman todas las ecuaciones se tiene
1 2 3 1 1 1 2 3 2 2 1 2 3 3 3(a a a )(b c ) (a a a )(b c ) ( a a a )(b c ) 0− + − + + − − + − + + − = .
Esta ecuación se satisface si b c= o si se cumple que
1 2 3
1 2 3
1 2 3
a a a 0
a a a 0
a a a 0
− + = + − =− + + =
.
Como el determinante de la matriz del sistema es (4 0)≠ la única solución es a 0= .
Como por hipótesis a 0≠ , se puede concluir que b c= .
2. ¿En qué puntos la recta tangente a la curva r 3 2 2(t) (3t t ,3t ,3t t )= − + es paralela al plano
x y z 2 0+ + + = ?
Solución.
r 2'(t) (3 3t ,6t,3 2t)= − + y el vector normal del plano es N (1,1,1)= . Para que se verifique
la relación de paralelismo se debe tener que r N'(t) 0• = . De modo que 2 2 2(3 3t ,6t,3 2t) (1,1,1) 0 3 3t 6t 3 2t 0 3t 8t 6 0− + • = ⇒ − + + + = ⇒ − − = .
Aplicando resolvente: 8 64 4.3.6 8 136 8 2 34 4 34
t .6 6 6 3
± + ± ± ±= = = =
De modo que
1 24 34 4 34
t , t .3 3
+ −= =

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 35 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Los puntos son r 1(t ) y r 2(t ).
3. Demuestre que si r(t) es constante entonces r(t) y r '(t) son ortogonales.
Solución.
Sea r(t) k= , entonces r r r2 2 2(t) k (t) (t) k= ⇒ • = . Si se deriva se tiene que
r r r r r r(t) '(t) '(t) (t) 0 (t) '(t) 0• + • = ⇒ • =
y de acuerdo a lo visto en puntos anteriores los vectores r(t) y r '(t) son ortogonales.
4. Sea el arco
2 2
2 2t(t) 1,
t 1 t 1 = − + +
c , 0 t 1≤ ≤ .
Calcule su longitud.
Solución.
c c2 2
2 2 2 2 2 2 2 2 2 2
2 2t 4t 2(t 1) 2t2t 4t 2 2t(t) 1, (t) ; ;
t 1 t 1 (t 1) (t 1) (t 1) (t 1)
− + − − − ′= − ⇒ = = + + + + + +
c2 2 4 4 2 2 2 2 2
2 4 2 4 2 4 2 4 2
11
c 020
16t 4 8t 4t 4t 8t 4 (2t 2) (t 1) 2(t) 2
(t 1) (t 1) (t 1) (t 1) (t 1)
2l dt 2arctg(t)
2(t 1)
+ − + + + + +′ = = = = =+ + + + +
π= = =+∫
5. Dada la curva definida por r 3 2(t) (t 3t,3t )= − , calcule:
a. Los valores de t para los cuales r(t) se autointersecta, es decir, r r1 2(t ) (t )= siendo
1 2t t≠ .
Solución. Sean 1A t= y 2B t= . Se tiene que
3 3 3 3A 3A B 3B A B 3(A B) 0− = − ⇒ − − − = .
Entonces se obtiene
2 2 2 2(A B)(A AB B 3) 0 A B o A AB B 3 0− + + − = ⇒ = + + − = .
Por otro lado se tiene que 2 23A 3B A B o A B= ⇒ = = − .
Sustituyendo: 2 2 2A A A 3 0 A 3− + − = ⇒ = ± .
De modo que los valores de t son 1t 3= − y 2t 3= .
b. La longitud del lazo entre r 1(t ) y r 2(t ) .
Solución. Si r 2'(t) (3t 3,6t)= − entonces

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 36 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
3 3 32 2 2 4 2 2 2
3 3 0
L (3t 3) 36t dt 9t 18t 9 36t dt 6 (t 1)dt 12 3.− −
= − + = − + + = + =∫ ∫ ∫
6. Halle la longitud de arco de la hélice cónica C de ecuaciones paramétricas dadas por tx(t) ae cos(t)= , ty(t) ae sen(t)= , tz(t) ae= , (a 0)>
desde el punto (0,0,0) hasta el punto (a,0,a).
Solución. t t t
t t t
(t) (ae cos(t),ae sen(t),ae ), t 0
(t) (ae (cos(t) sen(t)),ae (cos(t) sen(t)),ae ), t 0
= ≤
= − + ≤
r
r'
2 2t 2 2 2t 2 2 2t
t 2 2
t 2 2 2 2 t
(t) a e (cos(t) sen(t)) a e (cos(t) sen(t)) a e
ae (cos(t) sen(t)) (cos(t) sen(t)) 1
ae cos t 2cos(t)sen(t) sen (t) cos (t) 2cos(t)sen(t) sen (t) 1 3ae
= − + + +
= − + + +
= − + + + + + =
r'
r' t(t) dt 3ae dt= .
0 00
t t t b
b b bbb
3ae dt lím 3ae dt lím 3ae 3a lím (1 e ) 3a→−∞ →−∞ →−∞
−∞
= = = − =∫ ∫ .
7. Una parametrización en sentido antihorario para la curva C definida por
2 22
y cos(x) x ,4 2
2 2y x x 0,
4
x y y ,04 16 4
π π = ∈
π = ∈ π π π π − + = ∈ −
,
viene dada por la función vectorial
r
2 4
2 24 4 4 2 2 4 4 4
5 5 34 4 4 4 4 4 4
( t, cos(t)) t
(t) ( (t ), (t )) t 1
( cos(t 1 ), sen(t 1 )) 1 t 1
π π
π π π π π π
π π π π π π π
− − ≤ ≤ −= − + − + − ≤ ≤ − + − + − + − ≤ ≤ +
.
Usando la función vectorial r(t) , construya la función r' r''(t) (t)• .
Solución. Paso 1. Cálculo de r'(t) .
r'
2 4
24 2 4 45 5 3
4 4 4 4 4 4
( 1, sen(t)) t
(t) ( , ) t 1
( sen(t 1 ), cos(t 1 )) 1 t 1
π π
π π π
π π π π π π
− − − ≤ ≤ −= − − − < ≤ − − − + − + − < ≤ +

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 37 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Paso 2. Cálculo de r''(t) .
r''2 4
4 45 5 3
4 4 4 4 4 4
(0, cos(t)) t
(t) (0,0) t 1
( cos(t 1 ), sen(t 1 )) 1 t 1
π π
π π
π π π π π π
− − ≤ ≤ −= − < ≤ − − − + − − + − < ≤ +
Paso 3. Cálculo de r' r''(t) (t)• .
r' r''2 4
4 43
4 4
sen(t)cos(t) t
(t) (t) 0 t 1
0 1 t 1
π π
π π
π π
− ≤ ≤ −• = − ≤ ≤ − − ≤ ≤ +
8. Una partícula se mueve con vector posición
r A B A B3/2
2 2(t) t t 2 t
3 = + + ×
donde A y B son dos vectores unitarios fijos que forman un ángulo de / 3π . Calcule el
tiempo empleado para desplazarse una distancia de 12 unidades de longitud de arco desde la posición inicial r(0) .
Solución.
Paso 1. Cálculo de r' r'2
(t) y (t) .
r' A B A B1/2
2(t) 2t 2 t
3 = + + ×
.
r' r' r' A B A B A B A B
A A A B A A B B A B B
B A B A B A
1/2 1/22
1/22
1/2 1/2
2 2(t) (t) (t) 2t 2 t 2t 2 t
3 3
22t( ) 2 t ( ( )) 2t( ) 4t ( )
3
2 24t t ( ( )) 2 t (( ) )
3 3
= • = + + × • + + ×
= • + • + • × + • + •
+ • × + × •
A B B
A B A B
1/22
4t t (( ) )3
24 t ( ) ( )
3
+ × •
+ × • ×
Paso 2. Uso de propiedades para el cálculo de r'(t) .
Propiedades a usar:
A A A B B B A B B A A B A B
A B A B A B A B A B
A A B A B A B A B A B B
2 2 13 2
23 33 2 4
1 , 1 , , cos( )
sen( ) , ( ) ( )
( ) ( ) 0 , ( ) ( ) 0
π
π
• = = • = = • = • • = =
× = = × • × = × =
• × = × • = • × = × • =
De manera que

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 38 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
r' 0 0 0 0
1/2 1/2 1/2 1/22 21 1
2 2
34
2 2 2 2(t) 1 2t. 2 t 2t. 4t .1 4t t 2 t 4t t
3 3 3 3
24 t .
3
= + + + + + + +
+
.
r' r'2 2 2 231 1 2
2 2 3 4(t) 1 2t. 2t. 4t .1 4. t. 4t 4t 1 (2t 1) (t) 2t 1= + + + + = + + = + ⇒ = + .
Paso 3. Cálculo de s(t) .
r
r't t
t2 2
0(0) 0
s(t) (t) dt (2 1)d ( ) t t 12= = α + α = α + α = + =∫ ∫ .
Por lo tanto 2 2t t 12 t t 12 0 (t 4)(t 3) t 4 ó t 3+ = ⇒ + − = ⇒ + − ⇒ = − = .
Como t debe ser mayor o igual a cero, entonces se toma t 3= .
9. Sea r(s), s I∈ , una parametrización por longitud de arco de una curva C. Pruebe que los vectores r '(s) y r ''(s) son ortogonales.
Solución. Si r(s) es una parametrización por longitud de arco, se tiene que r '(s) 1= . Como la
norma de este vector es constante, entonces es ortogonal con r ''(s).
10. Sea a un vector unitario y constante y r(t) una curva tal que r a 2t(t) e• = . Sabiendo que el
ángulo θ entre r'(t) y a es constante, con 2
0 π< θ < , pruebe que
r' r''r a
r' r'(n) n 1 2t (t) (t)
(t) 2 e , n 1(t) (t)
− •• = ≥•
.
Solución. 2t 1 2t 2 2t 3 2t
(n) n 2t
(t) e (t) 2 e (t) 2 e (t) 2 e
... (t) 2 e
• = ⇒ • = ⇒ • = ⇒ • =
⇒ ⇒ • =
r a r' a r'' a r''' a
r a
2t 2t 2t
2 4t 2
(t) 2e (t) cos( ) 2e (t) 2e sec( )
(t) (t) (t) 4e sec ( )
• = ⇒ θ = ⇒ = θ
⇒ • = = θ
r' a r' r'
r' r' r'
r' r' r' r'' r' r''4t 2 4t 2 4t 2(t) (t) 4e sec ( ) 2 (t) (t) 16e sec ( ) (t) (t) 8e sec ( )• = θ ⇒ • = θ ⇒ • = θ
r' r''r' r'
4t 2
4t 2
(t) (t) 8e sec ( )2
(t) (t) 4e sec ( )
• θ= =• θ
.
Por lo tanto
�r' r''
r ar' r'
n 2t n 1 2t
(t) (t)(n)(t)(t) (t)
2 e 2 e . 2−
•••
=��� .

GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 39 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.19. GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Para construir curvas definidas mediante una función vectorial se estudian, siguiendo
los delineamientos de funciones de una variable, las funciones coordenadas x(t), y(t). El
esquema a seguir, contiene ciertos detalles:
I. Información de r(t):
a. Dominio de r(t) denotado como D(r).
b. Corte con los ejes: • Eje x: Encuentre rt D( )∈ tal que y(t) 0=
• Eje y: Encuentre rt D( )∈ tal que x(t) 0=
c. Signo. Tome en cuenta los valores de t donde hay cortes con algún eje así como los
valores de t para los cuales r(t) no es continua.
d. Simetrías: • Si rD( ) es simétrico y r( t) ( x(t), y(t))− = − − , la curva es simétrica respecto del
origen. • Si rD( ) es simétrico y r( t) ( x(t), y(t))− = − , la curva es simétrica respecto del eje y.
• Si rD( ) es simétrico y r( t) (x(t), y(t))− = − , la curva es simétrica respecto del eje x.
e. Asíntotas y puntos asintóticos: • Si 0t = ±∞ (si está dentro del dominio de la función vectorial) entonces:
• Si t t0l í m x(t) k→
= y t t0l í m y(t)→
= ±∞ , x k= es una asíntota vertical.
• Si t t0l í m x(t)→
= ±∞ y t t0l í m y(t) k→
= , y k= es una asíntota horizontal.
• Si t t0l í m x(t)→
= ±∞ , t t0l í m y(t)→
= ±∞ , t t0
y(t)lí m m
x(t)→= y
t t0l í m[y(t) mx(t)] b→
− = con m
y b finitos entonces y mx b= + es una asíntota oblicua.
• Si t t0l í m x(t) a→
= y t t0l í m y(t) b→
= , (a,b) es un punto asintótico.
• Si r(t) no es continua en 0t entonces:
• Si t t0
l í m x(t) k−→
= y t t0
l í m y(t)−→
= ±∞ o t t0
l í m x(t) k+→
= y t t0
l í m y(t)+→
= ±∞ , x k= es una
asíntota vertical. • Si
t t0
l í m x(t)−→
= ±∞ y t t0
l í m y(t) k−→
= o t t0
l í m x(t)+→
= ±∞ y t t0
l í m y(t) k+→
= , y k= es una
asíntota horizontal.

GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 40 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
• Si
t t0l í m x(t)→
= ±∞ , t t0l í m y(t)→
= ±∞ , t t0
y(t)lí m m
x(t)→= y
t t0l í m[y(t) mx(t)] b→
− = con m
y b finitos entonces y mx b= + es una asíntota oblícua.
• Si t t0l í m x(t) a→
= y t t0l í m y(t) b→
= , (a,b) es un punto asintótico.
• Si r(t) no es continua en 0t entonces:
• Si t t0
l í m x(t) k−→
= y t t0
l í m y(t)−→
= ±∞ o t t0
l í m x(t) k+→
= y t t0
l í m y(t)+→
= ±∞ , x k= es una
asíntota vertical. • Si
t t0
l í m x(t)−→
= ±∞ y t t0
l í m y(t) k−→
= o t t0
l í m x(t)+→
= ±∞ y t t0
l í m y(t) k+→
= , y k= es una
asíntota horizontal.
• Si t t0
l í m x(t)−→
= ±∞ , t t0
l í m y(t)−→
= ±∞ , t t0
y(t)l í m m
x(t)−→= y
t t0
l í m[y(t) mx(t)] b−→
− = o
t t0
l í m x(t)+→
= ±∞ , t t0
l í m y(t)+→
= ±∞ , t t0
y(t)lí m m
x(t)+→= y
t t0
l í m[y(t) mx(t)] b+→
− = con m y b
finitos entonces y mx b= + es una asíntota oblícua.
• Si t t0
l í m x(t) a−→
= y t t0
l í m y(t) b−→
= o t t0
l í m x(t) a+→
= y t t0
l í m y(t) b+→
= , (a,b) es un
punto asintótico.
II. Información de r'(t):
a. Cálculo de r'(t) .
b. Dominio de r'(t) denotado como D(r’).
c. Tangentes y puntos cuspidales • Si 0x '(t ) 0= , r'0t D( )∈ , con 0y '(t ) 0≠ , entonces se tiene una tangente vertical
de ecuación 0x x(t )= al gráfico en r 0(t ) .
• Si 0y '(t ) 0= , r'0t D( )∈ , con 0x '(t ) 0≠ , entonces se tiene una tangente
horizontal de ecuación 0y y(t )= al gráfico en r 0(t ) .
• Si r 0'(t ) (0,0)= , r'0t D( )∈ , entonces se tiene un punto cuspidal (pico) al gráfico
en 0t .
d. Crecimiento y decrecimiento de r(t). Tome en cuenta los valores de t donde
x '(t) 0= o y '(t) 0= así como los valores de t para los cuales r’(t) no es continua.
e. Valores máximos y mínimos. Tome en cuenta los valores de t, ( r't D( )∈ ), para los
cuales x '(t) 0= y x '(t ).x '(t ) 0− + < así como los valores de t para los cuales y '(t) 0=
y y '(t ).y '(t ) 0− + < , donde t− es un número cercano a t y menor que t y t+ es un
número cercano a t y mayor que t.

GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 41 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
III. Información de la concavidad de r(t)
a. Cálculo de la segunda derivada
b. Concavidad de r(t) . Tome en cuenta los valores de t donde 2
2
d y(t) 0
dx= así como los
valores de t para los cuales 2
2
d y(t)
dx no es continua.
c. Puntos de inflexión. Tome en cuenta los valores de t para los cuales 2
2
d y(t) 0
dx= y
2 2
2 2
d y d y(t ). (t ) 0
dx dx− + < , donde t− es un número cercano a t y menor que t y t+ es un
número cercano a t y mayor que t.
IV. Gráfico de r(t)
Ejemplo 16. Estudie en forma detallada y grafique la curva
r2 2
2
t t(t) ,
1 t1 t
= −−
,
indicando el sentido del recorrido.
Solución. I. Información de r(t) :
a. Dominio: R { 1,1}− − .
b. Corte con los ejes: Eje x: y 0 t 0= ⇒ = . Eje y: rx 0 t 0 , (0) (0,0)= ⇒ = = . Pasa por el origen.
c. Signo:
t -1 0 1
x - + + -
y + + + -
Cuadrante II I I III
d. Simetrías:
r2 2 2 2
2 2
( t) ( t) t t( t) , ,
1 ( t) 1 t1 ( t) 1 t
− −− = = − − +− − − .
La curva no presenta ningún tipo de simetría.
e. Asíntotas y puntos asintóticos:
•••• Verticales:
2 2
2t t
t tlím 1 , lím
1 t1 t→−∞ →−∞= − = +∞
−−.
2 2
2t t
t tlím 1 , lím
1 t1 t→+∞ →+∞= − = −∞
−−.
Por tanto x 1= − es asíntota vertical de la curva cuando t → −∞ y cuando t → +∞ .
GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 42 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
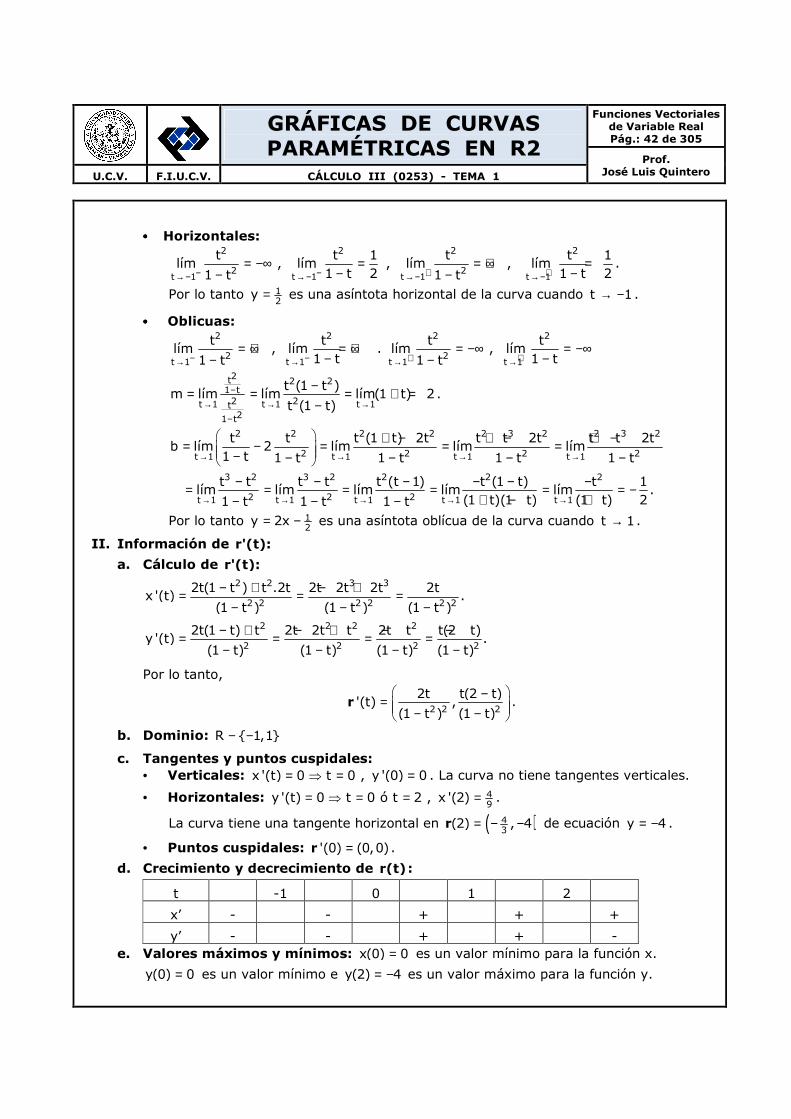
•••• Horizontales:
2 2 2 2
2 2t 1 t 1 t 1 t 1
t t 1 t t 1lím , lím , lím , lím
1 t 2 1 t 21 t 1 t− − + +→− →− →− →−= −∞ = = +∞ =
− −− −.
Por lo tanto 12y = es una asíntota horizontal de la curva cuando t 1→ − .
•••• Oblicuas:
2 2
2t 1 t 1
t tlím , lím
1 t1 t− −→ →= +∞ = +∞
−−.
2 2
2t 1 t 1
t tlím , lím
1 t1 t+ +→ →= −∞ = −∞
−−
2t 2 21 t
2 2t 1 t 1 t 1t21 t
t (1 t )m lím lím lím(1 t) 2
t (1 t)−
→ → →−
−= = = + =−
.
2 2 2 2 2 3 2 2 3 2
2 2 2 2t 1 t 1 t 1 t 1
3 2 3 2 2 2 2
2 2 2t 1 t 1 t 1 t 1 t 1
t t t (1 t) 2t t t 2t t t 2tb lím 2 lím lím lím
1 t 1 t 1 t 1 t 1 t
t t t t t (t 1) t (1 t) t 1lím lím lím lím lím .
(1 t)(1 t) (1 t) 21 t 1 t 1 t
→ → → →
→ → → → →
+ − + − + −= − = = = − − − − −
− − − − − −= = = = = = −+ − +− − −
Por lo tanto 12y 2x= − es una asíntota oblícua de la curva cuando t 1→ .
II. Información de r'(t):
a. Cálculo de r'(t): 2 2 3 3
2 2 2 2 2 2
2t(1 t ) t .2t 2t 2t 2t 2tx '(t) .
(1 t ) (1 t ) (1 t )
− + − += = =− − −
2 2 2 2
2 2 2 2
2t(1 t) t 2t 2t t 2t t t(2 t)y '(t) .
(1 t) (1 t) (1 t) (1 t)
− + − + − −= = = =− − − −
Por lo tanto,
r2 2 2
2t t(2 t)'(t) ,
(1 t ) (1 t)
−= − − .
b. Dominio: R { 1,1}− −
c. Tangentes y puntos cuspidales: • Verticales: x '(t) 0 t 0 , y '(0) 0= ⇒ = = . La curva no tiene tangentes verticales.
• Horizontales: 49y '(t) 0 t 0 ó t 2 , x '(2)= ⇒ = = = .
La curva tiene una tangente horizontal en ( )r 43(2) , 4= − − de ecuación y 4= − .
• Puntos cuspidales: r '(0) (0,0)= .
d. Crecimiento y decrecimiento de r(t) :
t -1 0 1 2
x’ - - + + +
y’ - - + + - e. Valores máximos y mínimos: x(0) 0= es un valor mínimo para la función x.
y(0) 0= es un valor mínimo e y(2) 4= − es un valor máximo para la función y.
GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 43 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
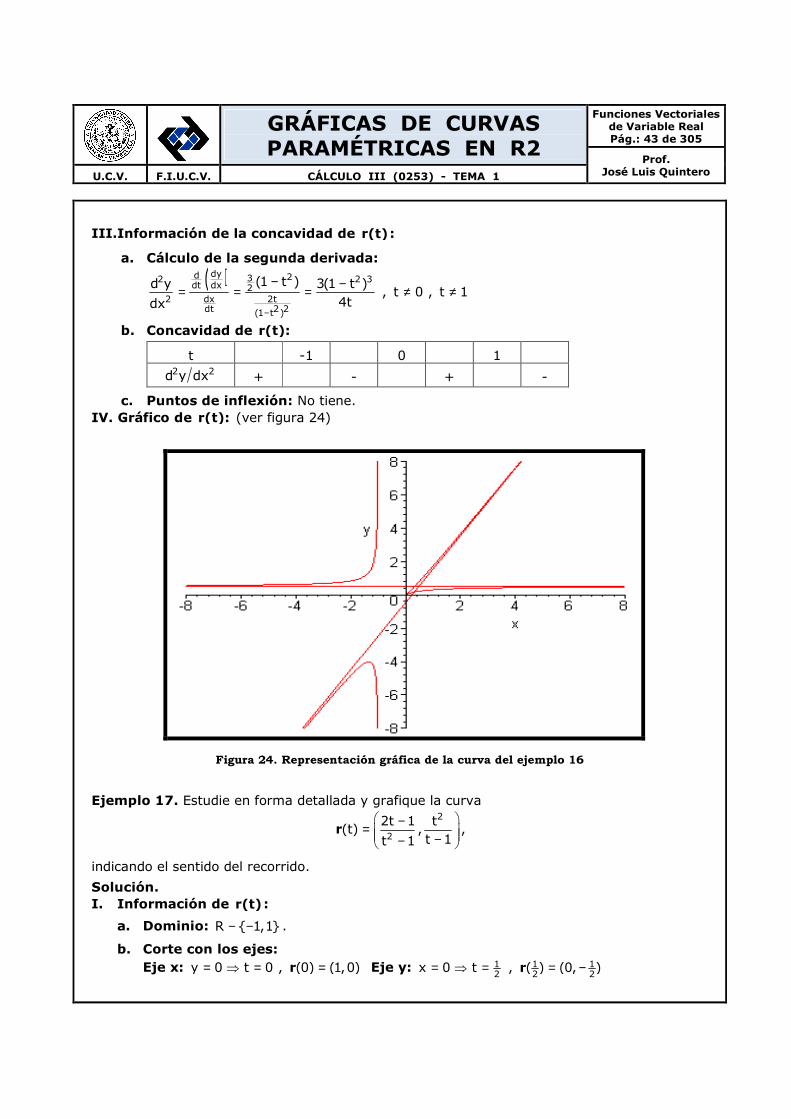
III.Información de la concavidad de r(t) :
a. Cálculo de la segunda derivada:
( )
dyd 232 2 3dt dx 2
2 dx 2tdt 2 2(1 t )
(1 t )d y 3(1 t ), t 0 , t 1
4tdx−
− −= = = ≠ ≠
b. Concavidad de r(t):
t -1 0 1 2 2d y dx + - + -
c. Puntos de inflexión: No tiene. IV. Gráfico de r(t): (ver figura 24)
Figura 24. Representación gráfica de la curva del ejemplo 16
Ejemplo 17. Estudie en forma detallada y grafique la curva
r2
2
2t 1 t(t) ,
t 1t 1
−= −− ,
indicando el sentido del recorrido.
Solución. I. Información de r(t) :
a. Dominio: R { 1,1}− − .
b. Corte con los ejes: Eje x: ry 0 t 0 , (0) (1,0)= ⇒ = = Eje y: r1 1 1
2 2 2x 0 t , ( ) (0, )= ⇒ = = −

GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 44 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
c. Signo:
t -1 0 1/2 1
x - + + - +
y - - - - +
Cuadrante III IV IV III I
d. Simetrías:
r2 2
2 2
2( t) 1 ( t) 2t 1 t( t) , ,
( t) 1 t 1( t) 1 t 1
− − − − −− = = − − − −− − − .
La curva no presenta ningún tipo de simetría.
e. Asíntotas y puntos asintóticos:
•••• Verticales:
2
2t t
2t 1 tlím 0 , lím
t 1t 1→−∞ →−∞
− = = −∞−−
. 2
2t t
2t 1 tlím 0 , lím
t 1t 1→+∞ →+∞
− = = +∞−−
.
Por lo tanto x 0= es una asíntota vertical de la curva cuando t → −∞ y cuando
t → +∞ .
•••• Horizontales:
2 2
2 2t 1 t 1 t 1 t 1
2t 1 t 1 2t 1 t 1lím , lím , lím , lím
t 1 2 t 1 2t 1 t 1− − + +→− →− →− →−
− −= −∞ = − = +∞ = −− −− −
.
Por lo tanto 12y = − es una asíntota horizontal de la curva cuando t 1→ − .
•••• Oblicuas:
2
2t 1 t 1
2t 1 tlím , lím
t 1t 1− −→ →
− = −∞ = −∞−−
. 2
2t 1 t 1
2t 1 tlím , lím
t 1t 1+ +→ →
− = +∞ = +∞−−
2t 2 2 2 2t 12t 1t 1 t 1 t 1 t 12t 1
t (t 1) t (t 1)(t 1) t (t 1)m lím lím lím lím 2.
(2t 1)(t 1) (2t 1)(t 1) 2t 1−−→ → → →−
− + − += = = = =− − − − −
2 2 3 2
2 2 2t 1 t 1 t 1
2 2
t 1 t 1
t 2t 1 t (t 1) 2(2t 1) t t 4t 2b lím 2 lím lím
t 1 t 1 t 1 t 1
(t 1)(t 2t 2) t 2t 2 1lím lím .
(t 1)(t 1) t 1 2
→ → →
→ →
− + − − + − += − = = − − − −
− + − + −= = =− + +
Por lo tanto 12y 2x= + es una asíntota oblicua de la curva cuando t 1→ .
II. Información de r'(t): a. Cálculo de r'(t):
2 2 2 2 2
2 2 2 2 2 2 2 2
2(t 1) (2t 1)2t 2t 2 4t 2t 2t 2t 2 2(t t 1)x '(t) .
(t 1) (t 1) (t 1) (t 1)
− − − − − + − + − − − += = = =− − − −
2 2 2 2
2 2 2 2
2t(t 1) t 2t 2t t t 2t t(t 2)y '(t) .
(t 1) (t 1) (t 1) (t 1)
− − − − − −= = = =− − − −
Por lo tanto,

GRÁFICAS DE CURVAS PARAMÉTRICAS EN R2
Funciones Vectoriales de Variable Real Pág.: 45 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
r2
2 2 2
2(t t 1) t(t 2)'(t) ,
(t 1) (t 1)
− − + −= − − .
b. Dominio: R { 1,1}− −
c. Tangentes y puntos cuspidales: • Verticales: rx '(t) 0 t D( ).< ∀ ∈ La curva no tiene tangentes verticales.
• Horizontales: 23y '(t) 0 t 0 ó t 2 , x '(0) 2 , x '(2)= ⇒ = = = − = − . La curva tiene
una tangente horizontal en ( )r(0) 1,0= de ecuación y 0= y otra en ( )r(2) 1,4= de
ecuación y 4= .
• Puntos cuspidales: No tiene. d. Crecimiento y decrecimiento de r(t) :
t -1 0 1 2
x’ - - - - -
y’ + + - - +
e. Valores máximos y mínimos: y(0) 0= es un valor máximo e y(2) 4= es un valor mínimo para la función y.
III.Gráfico de r(t): (ver figura 25)
Figura 25. Representación gráfica de la curva del ejemplo 17

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 46 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.20. EJERCICIOS RESUELTOS
4. Estudie en forma detallada y grafique la curva
r2
4 4
4t 4t(t) ,
1 t 1 t
= − −
,
indicando el sentido del recorrido.
Solución. I. Información de r(t) :
a. Dominio: R { 1,1}− − .
b. Corte con los ejes: Eje x: y 0 t 0= ⇒ = . Eje y: rx 0 t 0 , (0) (0,0)= ⇒ = = . Pasa por el origen.
c. Signo:
t -1 0 1
x + - + -
y - + + -
Cuadrante IV II I III
d. Simetrías:
r2 2
4 4 4 4
4( t) 4( t) 4t 4t( t) , , ( x(t), y(t))
1 ( t) 1 ( t) 1 t 1 t
− −− = = − = − − − − − − − .
La curva es simétrica respecto del eje y. Intervalo de estudio [0, )∞ .
e. Asíntotas y puntos asintóticos:
2
4 4t t
4t 4tlím 0 , lím 0 ,
1 t 1 t→+∞ →+∞= =
− −
2
4 4t t
4t 4tlím 0 , lím 0
1 t 1 t→−∞ →−∞= =
− −
(0,0) es un punto asintótico.
2 2
4 4 4 4t 1 t 1 t 1 t 1
4t 4t 4t 4tlím , lím , lím , lím
1 t 1 t 1 t 1 t− − + +→ → → →= +∞ = +∞ = −∞ = −∞
− − − −
•••• Oblicuas: 24t 2 441 t
4t 4t 1 t 1 t 141 t
4t (1 t )m lím lím lím t 1.
4t(1 t )−
→ → →−
−= = = =−
2 2
4 4 4 2t 1 t 1 t 1
2t 1
4t 4t 4t 4t 4t(1 t)b lím lím lím
1 t 1 t 1 t (1 t)(1 t)(1 t )
4tlím 1.
(t 1)(1 t )
→ → →
→
− − −= − = = − − − − + +
−= = −+ +
Por lo tanto y x 1= − es una asíntota oblicua de la curva cuando t 1→ .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 47 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
II. Información de r'(t):
a. Cálculo de r'(t): 4 3 4 4 4 4
4 2 4 2 4 2 4 2
4(1 t ) 4t.4t 4 4t 16t 4 12t 4(1 3t )x '(t) .
(1 t ) (1 t ) (1 t ) (1 t )
− + − + + += = = =− − − −
4 2 3 5 5 5 4
4 2 4 2 4 2 4 2
8t(1 t ) 4t .4t 8t 8t 16t 8t 8t 8t(1 t )y '(t) .
(1 t ) (1 t ) (1 t ) (1 t )
− + − + + += = = =− − − −
Por lo tanto,
r4 4
4 2 4 2
4(1 3t ) 8t(1 t )'(t) ,
(1 t ) (1 t )
+ += − − .
b. Crecimiento y decrecimiento de r(t) :
t 0 1
x’ + +
y’ + + dy dx + +
c. Valores máximos y mínimos: y(0) 0= es un valor mínimo para la función y.
III. Gráfico de r(t): (ver figura 26)
Figura 26. Representación gráfica de la curva del ejercicio 1
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 48 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
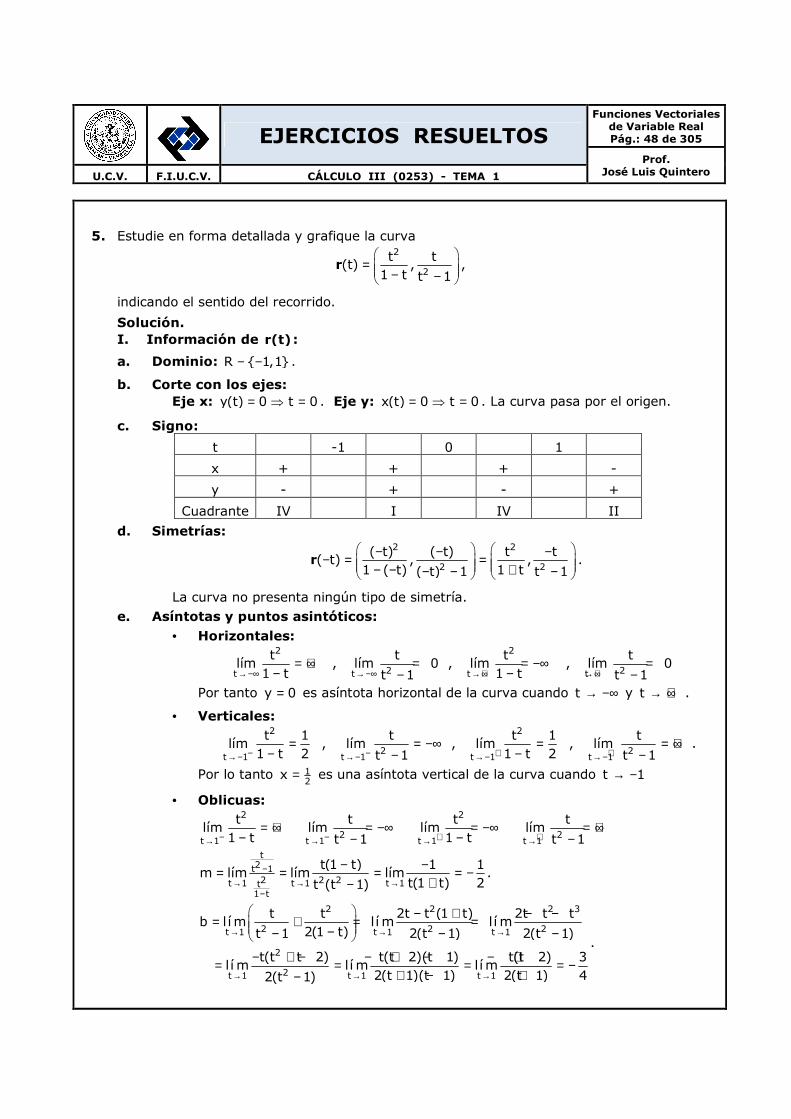
5. Estudie en forma detallada y grafique la curva
r2
2
t t(t) ,
1 t t 1
= − −
,
indicando el sentido del recorrido.
Solución. I. Información de r(t) :
a. Dominio: R { 1,1}− − .
b. Corte con los ejes: Eje x: y(t) 0 t 0= ⇒ = . Eje y: x(t) 0 t 0= ⇒ = . La curva pasa por el origen.
c. Signo:
t -1 0 1
x + + + -
y - + - +
Cuadrante IV I IV II
d. Simetrías:
r2 2
2 2
( t) ( t) t t( t) , ,
1 ( t) 1 t( t) 1 t 1
− − −− = = − − +− − − .
La curva no presenta ningún tipo de simetría. e. Asíntotas y puntos asintóticos:
• Horizontales:
2 2
2 2t t t t
t t t tlím , lím 0 , lím , lím 0
1 t 1 tt 1 t 1→−∞ →−∞ →+∞ →+∞= +∞ = = −∞ =
− −− −
Por tanto y 0= es asíntota horizontal de la curva cuando t → −∞ y t → +∞ .
• Verticales:
2 2
2 2t 1 t 1 t 1 t 1
t 1 t t 1 tlím , lím , lím , lím
1 t 2 1 t 2t 1 t 1− − + +→− →− →− →−= = −∞ = = +∞
− −− −.
Por lo tanto 12x = es una asíntota vertical de la curva cuando t 1→ −
• Oblicuas:
2 2
2 2t 1 t 1 t 1 t 1
t t t tlím lím lím lím
1 t 1 tt 1 t 1− − + +→ → → →= +∞ = −∞ = −∞ = +∞
− −− −
t2t 12 2 2t 1 t 1 t 1t
1 t
t(1 t) 1 1m lím lím lím .
t(1 t) 2t (t 1)−
→ → →−
− −= = = = −+−
2 2 2 3
2 2 2t 1 t 1 t 1
2
2t 1 t 1 t 1
t t 2t t (1 t) 2t t tb l í m lí m lí m
2(1 t)t 1 2(t 1) 2(t 1)
t(t t 2) t(t 2)(t 1) t(t 2) 3lí m lí m lí m
2(t 1)(t 1) 2(t 1) 42(t 1)
→ → →
→ → →
− + − −= + = = −− − −
− + − − + − − += = = = −+ − +−
.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 49 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Por lo tanto 1 3
y x2 4 = − +
es una asíntota oblicua de la curva.
II. Información de r'(t) :
a. Cálculo de r'(t) : 2 2 2 2
2 2 2 2
2t(1 t) t 2t 2t t 2t t t(2 t)x '(t)
(1 t) (1 t) (1 t) (1 t)
− + − + − −= = = =− − − −
.
2 2 2 2 2
2 2 2 2 2 2 2 2
(t 1) t.2t t 1 2t t 1 t 1y '(t)
(t 1) (t 1) (t 1) (t 1)
− − − − − − += = = = −− − − −
.
Por lo tanto,
r2
2 2 2
t(2 t) t 1'(t) ,
(1 t) (t 1)
− += − − − .
b. Dominio:R { 1,1}− − .
c. Tangentes y puntos cuspidales: • Verticales: 5
9x '(t) 0 t 0 ó t 2 , y '(0) 1 , y '(2)= ⇒ = = = = . La curva tiene una
tangente vertical en r(0) (0,0)= de ecuación x 0= y otra en r 23(2) ( 4, )= − de
ecuación x 4= − . • Horizontales: ry '(t) 0 t D( )< ∀ ∈ . No tiene tangentes horizontales.
• Puntos cuspidales: No tiene. d. Crecimiento y decrecimiento de r(t) :
t -1 0 1 2
x’ - - + + -
y’ - - - - - dy dx + + - - +
e. Valores máximos y mínimos: x(0) 0= es un valor mínimo y x(2) 4= − es un valor máximo para la función x.
III. Gráfico de r(t) : (ver figura 27)
6. Estudie en forma detallada y grafique la curva
r2
2
t t(t) ,
1 t1 t
= −−
,
indicando el sentido del recorrido.
Solución.
I. Información de r(t): a. Dominio: R { 1,1}− − .
b. Corte con los ejes: Eje x: y(t) 0 t 0= ⇒ = . Eje y: x(t) 0 t 0= ⇒ = . La curva pasa por el origen.
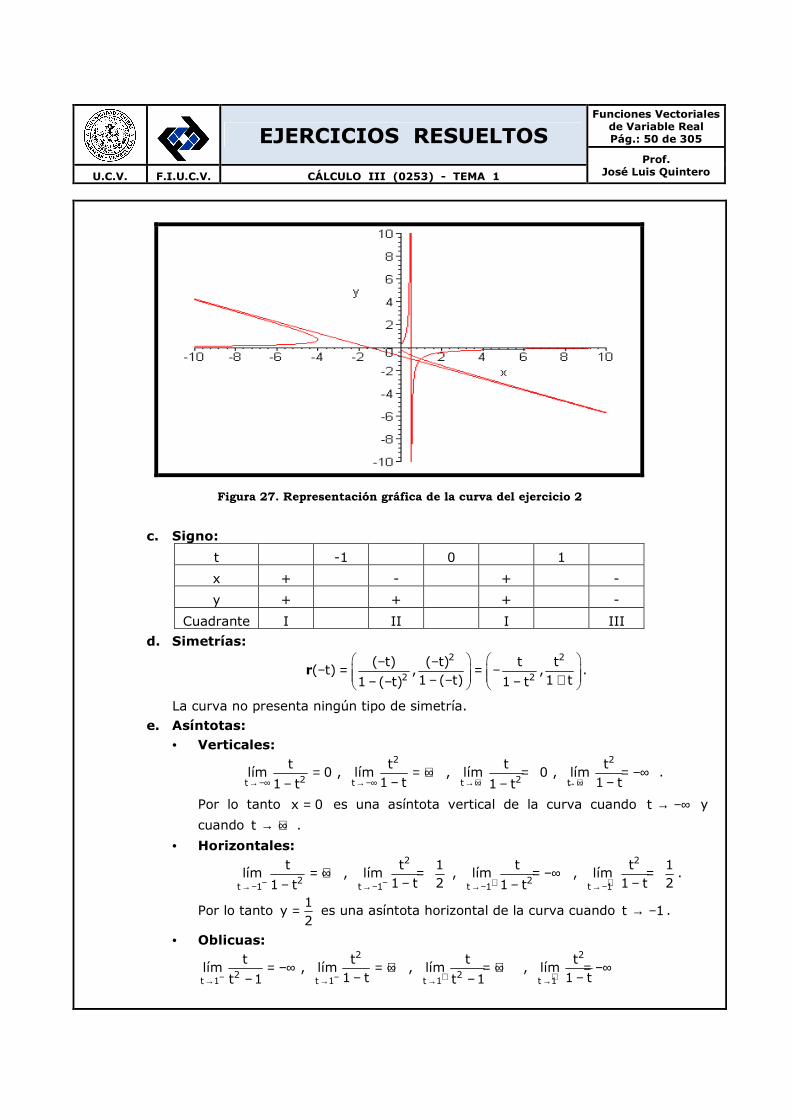
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 50 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 27. Representación gráfica de la curva del ejercicio 2
c. Signo:
t -1 0 1
x + - + -
y + + + -
Cuadrante I II I III
d. Simetrías:
r2 2
2 2
( t) ( t) t t( t) , ,
1 ( t) 1 t1 ( t) 1 t
− −− = = − − − +− − − .
La curva no presenta ningún tipo de simetría.
e. Asíntotas: • Verticales:
2 2
2 2t t t t
t t t tlím 0 , lím , lím 0 , lím
1 t 1 t1 t 1 t→−∞ →−∞ →+∞ →+∞= = +∞ = = −∞
− −− −.
Por lo tanto x 0= es una asíntota vertical de la curva cuando t → −∞ y
cuando t → +∞ .
• Horizontales:
2 2
2 2t 1 t 1 t 1 t 1
t t 1 t t 1lím , lím , lím , lím
1 t 2 1 t 21 t 1 t− − + +→− →− →− →−= +∞ = = −∞ =
− −− −.
Por lo tanto 1
y2
= es una asíntota horizontal de la curva cuando t 1→ − .
• Oblicuas:
2 2
2 2t 1 t 1 t 1 t 1
t t t tlím , lím , lím , lím
1 t 1 tt 1 t 1− − + +→ → → →= −∞ = +∞ = +∞ = −∞
− −− −

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 51 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2t 2
1 ttt 1 t 1 t 121 t
t (1 t)(1 t)m lím lím lím t(1 t) 2.
t(1 t)−
→ → →−
− += = = + =−
2 2 2 3
2 2 2t 1 t 1 t 1
2
t 1 t 1 t 1
t 2t t (1 t) 2t t t 2tb lím lím lim
1 t 1 t 1 t 1 t
t(t t 2) t(t 2)(t 1) t(t 2) 3lím lím lím
(1 t)(1 t) (t 1)(t 1) t 1 2
→ → →
→ → →
+ − + −= − = = − − − −
+ − + − += = − = − = −− + − + +
.
Por lo tanto 3
y 2x2
= − es una asíntota oblicua de la curva cuando t 1→ .
II. Información de r’(t): a. Cálculo de r’(t):
2 2 2
2 2 2 2
1 t 2t t 1x '(t)
(1 t ) (1 t )
− + += =− −
,
2 2 2 2
2 2 2 2
2t(1 t) t 2t 2t t 2t t t(2 t)y '(t)
(1 t) (1 t) (1 t) (1 t)
− + − + − −= = = =− − − −
.
Por lo tanto,
r2
2 2 2
t 1 t(2 t)'(t) ,
(1 t ) (1 t)
+ −= − − .
b. Dominio: R { 1,1}− − .
c. Tangentes y puntos cuspidales: • Verticales: rx '(t) 0 t D( )> ∀ ∈ . La curva no tiene tangentes verticales.
• Horizontales: 59y '(t) 0 t 0 ó t 2 , x '(0) 1 , x '(2)= ⇒ = = = = . La curva tiene
una tangente horizontal en r(0) (0,0)= de ecuación y 0= y otra en
r 23(2) ( , 4)= − − de ecuación y 4= − .
• Puntos cuspidales: No tiene.
d. Crecimiento y decrecimiento de r(t):
t -1 0 1 2
x’ + + + + +
y’ - - + + - dy dx - - + + -
e. Valores máximos y mínimos: y(0) 0= es un valor mínimo y y(2) 4= − es un valor máximo para la función y.
III. Gráfico de r(t) : (ver figura 28)

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 52 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 28. Representación gráfica de la curva del ejercicio 3
7. Estudie en forma detallada y grafique la curva
r2 2
t 1 t 1(t) ,
t t 4
− + = − ,
indicando el sentido del recorrido.
Solución. I. Información de r(t):
a. Dominio: R { 2,0,2}− −
b. Corte con los ejes: • Eje x: ry 0 t 1 , ( 1) ( 2,0)= ⇒ = − − = − • Eje y: rx 0 t 1 , (1) (0, 2 /3)= ⇒ = = −
c. Signo:
t -2 -1 0 1 2
x - - - - + +
y - + - - - +
Cuadrante III II III III IV I
d. Simetrías:
r2 2 2 2
( t) 1 ( t) 1 t 1 1 t( t) , ,
( t) ( t) 4 t t 4
− − − + + − − = = − − − − − .
La curva no presenta ningún tipo de simetría. e. Asíntotas y puntos asintóticos:
• Puntos asintóticos:
2 2t t
t 1 t 1lím 0 , lím 0
t t 4→−∞ →−∞
− += =−
. 2 2t t
t 1 t 1lím 0 , lím 0
t t 4→+∞ →+∞
− += =−
.
(0,0) es un punto asintótico.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 53 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2 2
t 2 t 2
t 1 3 t 1lím , lím
4t t 4− −→− →−
− += − = −∞−
. 2 2
t 2 t 2
t 1 3 t 1lím , lím
4t t 4+ +→− →−
− += − = +∞−
.
Por lo tanto 34x = − es una asíntota vertical de la curva cuando t 2→ − .
2 2
t 2 t 2
t 1 1 t 1lím , lím
4t t 4− −→ →
− += = −∞−
. 2 2
t 2 t 2
t 1 1 t 1lím , lím
4t t 4+ +→ →
− += = +∞−
.
Por lo tanto 14x = es una asíntota vertical de la curva cuando t 2→ .
• Horizontales:
2 2
t 0 t 0
t 1 t 1 1lím , lím
4t t 4− −→ →
− += −∞ = −−
. 2 2
t 0 t 0
t 1 t 1 1lím , lím
4t t 4+ +→ →
− += −∞ = −−
.
Por lo tanto 14y = − es una asíntota horizontal de la curva cuando t 0→ .
II. Información de r'(t): a. Cálculo de r'(t):
r2
3 2 2
2 t t 2t 4'(t) ,
t (t 4)
− + += − − .
b. Dominio: R { 2,0,2}− − .
c. Tangentes y puntos cuspidales: • Verticales: x '(t) 0 t 2= ⇒ = . La curva no tiene tangentes verticales.
• Horizontales: y '(t) 0 t< ∀ . La curva no tiene tangentes horizontales.
• Puntos cuspidales: No tiene. d. Crecimiento y decrecimiento de r(t) :
t -2 0 2
x’ - - + -
y’ - - - -
e. Valores máximos y mínimos: No tiene valores máximos ni mínimos.
III. Gráfico de r(t): (ver figura 29)
Figura 29. Representación gráfica de la curva del ejercicio 4

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 54 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
8. Estudie en forma detallada y grafique la curva
rt2e t
(t) ,t 1 t 1
= − −
,
indicando el sentido del recorrido.
Solución. I. Información de r(t):
a. Dominio: R {1}−
b. Corte con los ejes: Eje x: ry 0 t 0 , (0) ( 2,0)= ⇒ = = − Eje y: no existe t R / x 0∈ =
c. Signo:
t 0 1
x - - +
y + - +
Cuadrante II III I
d. Simetrías: Como rD( ) no es simétrico entonces la curva no presenta ningún tipo de simetría.
e. Asíntotas y puntos asintóticos:
• Puntos asintóticos:
t
t t
2e tlím 0 , lím 1
t 1 t 1→−∞ →−∞= =
− −.
Por lo tanto (0,1) es un punto asintótico. • Horizontal:
t
t t
2e tlím , lím 1
t 1 t 1→+∞ →+∞= +∞ =
− −.
Por lo tanto y 1= es una asíntota horizontal de la curva cuando t → +∞ .
• Oblicua:
t
t 1 t 1
2e tlím , lím
t 1 t 1− −→ →= −∞ = −∞
− −.
t
t 1 t 1
2e tlím , lím
t 1 t 1+ +→ →= +∞ = +∞
− −
Por lo tanto 34x = − es una asíntota vertical de la curva cuando t 2→ − .
tt 1
t tt 1 t 12et 1
t 1m lím lím .
2e2e−
→ →−
= = =
t t t t
t 1 t 1 t 1 t 1
t 1 2e 2et 2e 1 et e 1 e eb lím lím lím lím 0
t 1 2e t 1 2e(t 1) e t 1 e 1→ → → →
− − −= − = = = = − − − − .
Por lo tanto x
y2e
= es una asíntota oblicua de la curva cuando t 1→ .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 55 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
II. Información de r'(t):
a. Cálculo de r'(t):
rt
2 2
2e (t 2) 1'(t) ,
(t 1) (t 1)
−= − − − .
b. Dominio: R {1}− .
c. Tangentes y puntos cuspidales: • Verticales: x '(t) 0 t 2, y '(2) 1= ⇒ = = − .
La curva tiene una tangente vertical en r 2(2) (2e ,2)= de ecuación 2x 2e= . d. Crecimiento y decrecimiento de r(t) :
t 1 2
x’ - - +
y’ - - -
e. Valores máximos y mínimos: 2x(2) 2e= es un valor mínimo para la función x.
III. Gráfico de r(t): (ver figura 30)
Figura 30. Representación gráfica de la curva del ejercicio 5 9. Estudie en forma detallada y grafique la curva
r3
3 2
t t(t) ,
t 64 t 36
= + −
,
indicando el sentido del recorrido.
Solución. I. Información de r(t) :
a. Dominio: R { 6, 4,6}− − − .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 56 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Corte con los ejes:
Eje x: y(t) 0 t 0= ⇒ = . Eje y: x(t) 0 t 0= ⇒ = . La curva pasa por el origen.
c. Signo:
t -6 -4 0 6
x + + - + +
y - + + - +
Cuadrante IV I II IV I
d. Simetrías:
La curva no presenta ningún tipo de simetría porque su dominio no es simétrico.
e. Asíntotas y puntos asintóticos:
• Horizontales:
3 3
3 2 3 2t 4 t 4 t 4 t 4
t t 1 t t 1lím , lím , lím , lím
5 5t 64 t 36 t 64 t 36− − + +→− →− →− →−= +∞ = = −∞ =
+ − + −.
Por lo tanto 15
y = es una asíntota horizontal de la curva cuando t 4→ −
• Verticales:
3 3
3 2 3 2t 6 t 6 t 6 t 6
t 27 t t 27 tlím , lím , lím , lím
19 19t 64 t 36 t 64 t 36− − + +→− →− →− →−= = −∞ = = +∞
+ − + −.
Por lo tanto 2719
x = es una asíntota vertical de la curva cuando t 6→ −
3 3
3 2 3 2t 6 t 6 t 6 t 6
t 27 t t 27 tlím , lím , lím , lím
35 35t 64 t 36 t 64 t 36− − + +→ → → →= = −∞ = = +∞
+ − + −.
Por lo tanto 2735
x = es una asíntota vertical de la curva cuando t 6→ −
• Puntos asintóticos:
3 3
3 2 3 2t t t t
t t t tlím 1 , lím 0 , lím 1 , lím 0
t 64 t 36 t 64 t 36→−∞ →−∞ →+∞ →+∞= = = =
+ − + −.
Por lo tanto (1,0) es un punto asintótico de la curva cuando t → −∞ y cuando
t → +∞ . II. Información de r'(t):
a. Cálculo de r'(t):
r2 2
2 2 2 2 2
192t t 36'(t) ,
(t 4) (t 4t 16) (t 6) (t 6)
+= − + − + − + .
b. Dominio: R { 6, 4,6}− − − .
c. Tangentes y puntos cuspidales: • Verticales: 1
36x '(t) 0 t 0, y '(0)= ⇒ = = .
La curva tiene una tangente vertical en r(0) (0,0)= de ecuación x 0= .
• Horizontales: r'y '(t) 0 t D( )< ∀ ∈ . La curva no tiene tangentes horizontales.
• Puntos cuspidales: No tiene.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 57 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
d. Crecimiento y decrecimiento de r(t) :
t -6 -4 0 6
x’ + + + + +
y’ - - - - -
e. Valores máximos y mínimos: la curva no tiene puntos críticos.
III. Gráfico de r(t): (ver figura 31)
Figura 31. Representación gráfica de la curva del ejercicio 6 10. Estudie la curva de ecuación vectorial
r2
3 3
3t 3t(t) ,
1 t 1 t
= + +
,
indicando: dominio, cortes con los ejes, signo, simetrías, asíntotas, puntos asintóticos,
tangentes, puntos de tangencia y crecimiento.
Solución. Dominio: R { 1}− − . Cortes: Eje x: y(t) 0 t 0= ⇒ = . Eje y: x(t) 0 t 0= ⇒ = . La curva pasa por el origen.
Signo:
t -1 0
x + - +
y - + +
Cuadrante IV II I
Simetrías:
La curva no presenta ningún tipo de simetría porque su dominio no es simétrico.
Asíntotas y puntos asintóticos:

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 58 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Oblicuas:
2 2
3 3 3 3t 1 t 1 t 1 t 1
3t 3t 3t 3tlím , lím , lím , lím
1 t 1 t 1 t 1 t− − + +→− →− →− →−= +∞ = −∞ = −∞ = +∞
+ + + +.
23t 231 t3tt 1 t 1 t 1
31 t
y(t) 3tm lím lím lím 1
x(t) 3t+
→− →− →−+
= = = = − ,
2
3 3 2 2t 1 t 1 t 1 t 1
3t 3t 3t(t 1) 3tb lím y(t) mx(t) lím lím lím 1
1 t 1 t (t 1)(t t 1) t t 1→− →− →− →−
+= − = + = = = − + + + − + − +
Por lo tanto y x 1= − − es una asíntota oblicua de la curva cuando t 1→ −
Puntos asintóticos:
2 2
3 3 3 3t t t t
3t 3t 3t 3tlím 0 , lím 0 , lím 0 , lím 0
1 t 1 t 1 t 1 t→−∞ →−∞ →+∞ →+∞= = = =
+ + + +.
Por lo tanto (0,0) es un punto asintótico de la curva cuando t → −∞ y cuando t → +∞ . Cálculo de r'(t):
r3 3
3 2 3 2
3(1 2t ) 3t(2 t )'(t) ,
(1 t ) (1 t )
− −= + + .
Dominio: R { 1}− − .
Tangentes y puntos cuspidales: Verticales: 1 1
3 32 2x '(t) 0 t , y '( ) 0= ⇒ = ≠ .
La curva tiene angente vertical en r 2 3 31 1 13 3 32 2 2
( ) (2 ,2( ) ) ( 4, 2)= = de ecuación 3x 4= .
Horizontales: 3 3y '(t) 0 t 0 , t 2 , x '(0) 0 , x '( 2) 0= ⇒ = = ≠ ≠ .
La curva tiene una tangente horizontal en r(0) (0,0)= de ecuación y 0= .
La curva tiene una tangente horizontal en r 3 3 3( 2) ( 2, 4)= de ecuación 3y 4= .
Crecimiento y decrecimiento de r(t) :
t -1 0 132
3 2
x’ + + + - -
y’ - - + + -
Gráfico (ver figura 32)
11. Sea
r t 12(t) ,e
t t 1+
= +
.
Realice un estudio indicando dominio, signos, simetrías, asíntotas y tangentes.
Solución. a. Dominio: ( 1,0) (0, )− ∪ ∞ .
b. Corte con los ejes: No tiene corte con los ejes.
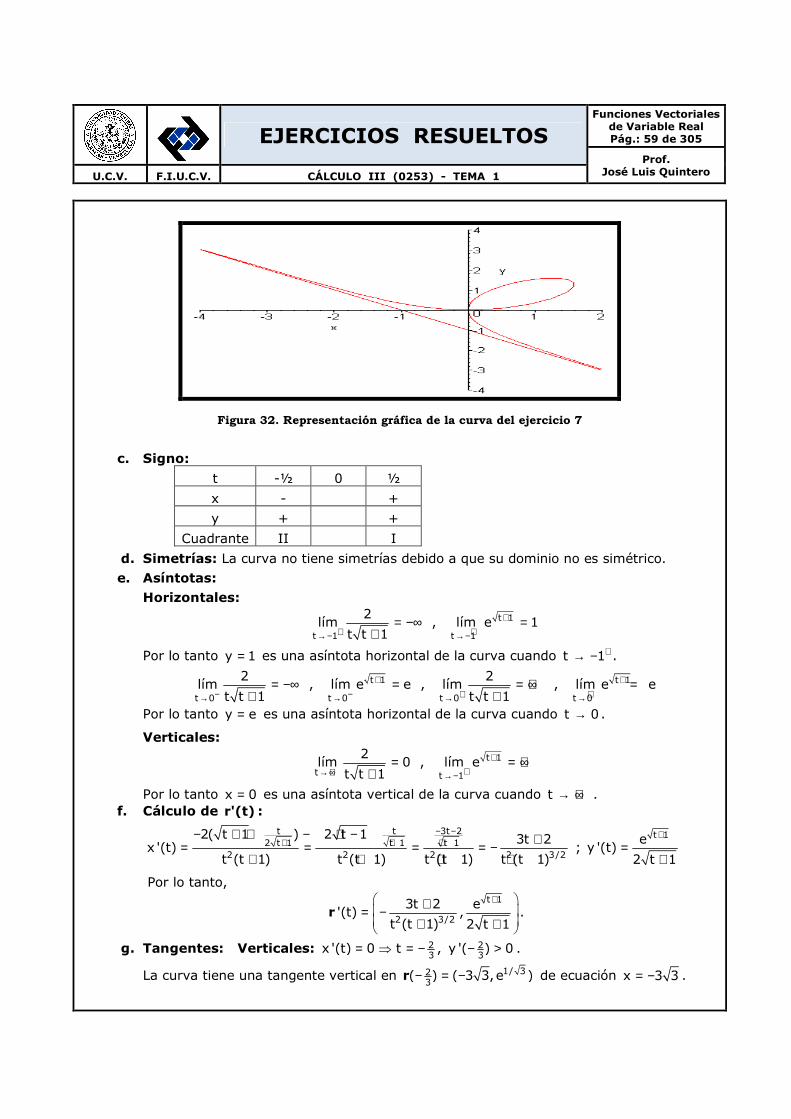
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 59 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 32. Representación gráfica de la curva del ejercicio 7
c. Signo:
t -½ 0 ½
x - +
y + +
Cuadrante II I
d. Simetrías: La curva no tiene simetrías debido a que su dominio no es simétrico.
e. Asíntotas:
Horizontales:
t 1
t 1 t 1
2lím , lím e 1
t t 1+
+ +→− →−= −∞ =
+
Por lo tanto y 1= es una asíntota horizontal de la curva cuando t 1+→ − .
t 1 t 1
t 0 t 0 t 0 t 0
2 2lím , lím e e , lím , lím e e
t t 1 t t 1+ +
− − + +→ → → →= −∞ = = +∞ =
+ +
Por lo tanto y e= es una asíntota horizontal de la curva cuando t 0→ .
Verticales:
t 1
t t 1
2lím 0 , lím e
t t 1+
+→+∞ →−= = +∞
+
Por lo tanto x 0= es una asíntota vertical de la curva cuando t → +∞ . f. Cálculo de r'(t) :
t t 3t 2 t 1
2 t 1 t 1 t 12 2 2 2 3/2
2( t 1 ) 2 t 1 3t 2 ex '(t) ; y '(t)
t (t 1) t (t 1) t (t 1) t (t 1) 2 t 1
− − ++ + +
− + + − + − += = = = − =+ + + + +
Por lo tanto,
rt 1
2 3/2
3t 2 e'(t) ,
t (t 1) 2 t 1
+ + = − + +
.
g. Tangentes: Verticales: 2 23 3
x '(t) 0 t , y '( ) 0= ⇒ = − − > .
La curva tiene una tangente vertical en r 1/ 323
( ) ( 3 3,e )− = − de ecuación x 3 3= − .
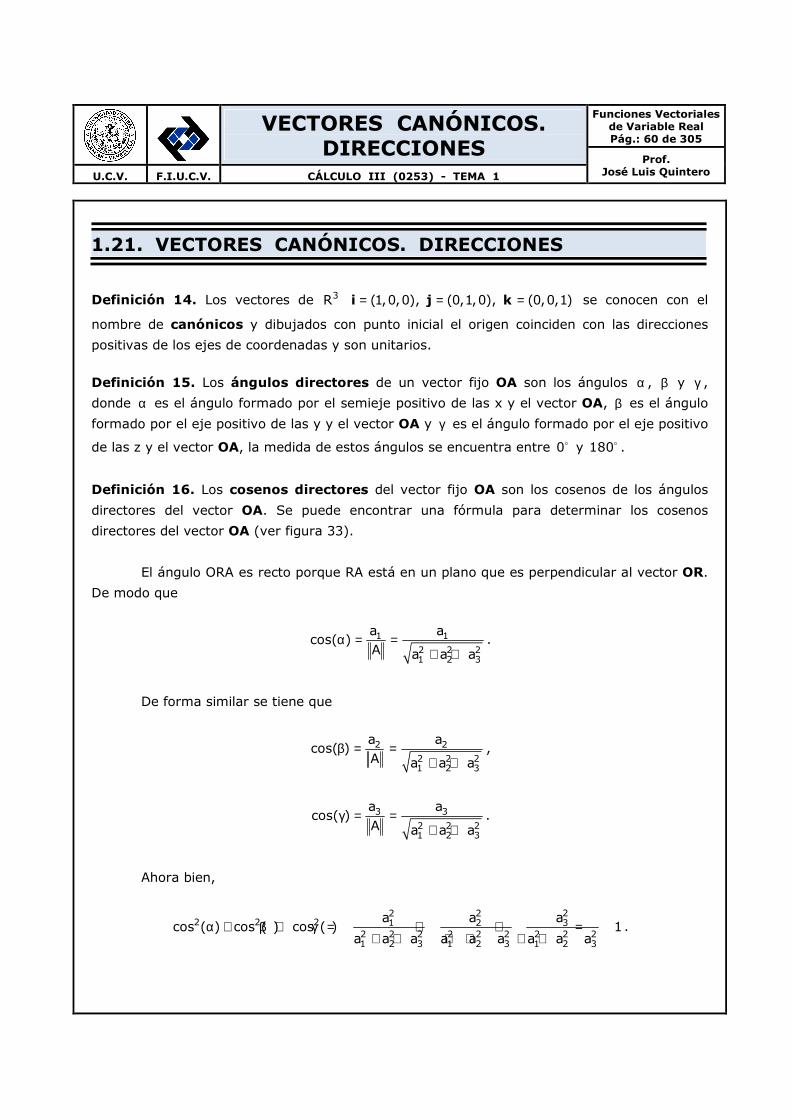
VECTORES CANÓNICOS. DIRECCIONES
Funciones Vectoriales de Variable Real Pág.: 60 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.21. VECTORES CANÓNICOS. DIRECCIONES
Definición 14. Los vectores de 3R i j k(1,0,0), (0,1,0), (0,0,1)= = = se conocen con el
nombre de canónicos y dibujados con punto inicial el origen coinciden con las direcciones
positivas de los ejes de coordenadas y son unitarios.
Definición 15. Los ángulos directores de un vector fijo OA son los ángulos α , β y γ ,
donde α es el ángulo formado por el semieje positivo de las x y el vector OA, β es el ángulo
formado por el eje positivo de las y y el vector OA y γ es el ángulo formado por el eje positivo
de las z y el vector OA, la medida de estos ángulos se encuentra entre 0� y 180� .
Definición 16. Los cosenos directores del vector fijo OA son los cosenos de los ángulos
directores del vector OA. Se puede encontrar una fórmula para determinar los cosenos
directores del vector OA (ver figura 33).
El ángulo ORA es recto porque RA está en un plano que es perpendicular al vector OR.
De modo que
1 1
2 2 21 2 3
a acos( )
A a a aα = =
+ +.
De forma similar se tiene que
2 2
2 2 21 2 3
a acos( )
A a a aβ = =
+ +,
3 3
2 2 21 2 3
a acos( )
A a a aγ = =
+ +.
Ahora bien,
22 2
2 2 2 31 22 2 2 2 2 2 2 2 21 2 3 1 2 3 1 2 3
aa acos ( ) cos ( ) cos ( ) 1
a a a a a a a a aα + β + γ = + + =
+ + + + + +.

VECTORES CANÓNICOS. DIRECCIONES
Funciones Vectoriales de Variable Real Pág.: 61 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 33. Cosenos directores de un vector fijo
1.22. VECTORES ORTOGONALES. PROYECCIÓN ORTOGONAL
Definición 17. Un vector x es ortogonal (perpendicular) al vector y si y sólo si
x y x y+ = − .
Observación 10. Si dos vectores x, y son perpendiculares se usará la notación x y⊥ .
TEOREMA 12. Dos vectores x, y son ortogonales si y sólo si x y 0• = .
Dados los vectores fijos a y b no nulos es posible proyectar el vector a sobre el vector
b y sobre un vector fijo w’ perpendicular a b como se indica en la figura 9.
Como se observa en la figura 34, a v w= + , donde v es la proyección de a sobre b y
w es la proyección ortogonal de a sobre b.
TEOREMA 13. (PROPIEDADES DE LA PROYECCIÓN DE UN VECTOR) a. v b= λ para algún escalar λ (v es paralelo a b).
b. a v w= + .
c. w b 0• = .

VECTORES CANÓNICOS. DIRECCIONES
Funciones Vectoriales de Variable Real Pág.: 62 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 34. Proyección del vector a sobre el vector b
1.23. CÁLCULO DE LA PROYECCIÓN DE UN VECTOR SOBRE OTRO
a b w v b w b v b v b v b b b b b( ) 0 ( ) ( )• = + • = • + • = + • = • = λ • = λ •
De lo anterior se tiene que
a bb b
•λ =•
.
La proyección de a sobre b se puede escribir como
b ba b
a b a bb
2proy comp(proy )
• = =
.
El vector
a bw a b a b
b 2
• = − λ = −
es ortogonal a b para cualquier vector a (ver figuras 35 y 36).

CÁLCULO DE LA PROYECCIÓN DE UN VECTOR SOBRE OTRO
Funciones Vectoriales de Variable Real Pág.: 63 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 35. Proyección del vector a sobre el vector b con escalar positivo
Figura 36. Proyección del vector a sobre el vector b con escalar negativo
1.24. FORMAS DE LA ECUACIÓN DEL PLANO
Para hallar la ecuación de un plano es necesario conocer un punto y dos vectores
directores del mismo. Un plano, (obtenido a partir de un punto (x0,y0,z0) y dos vectores v 1 2 3(v ,v ,v )= y w 1 2 3(w ,w ,w )= ), se puede expresar de las siguientes formas:

FORMAS DE LA ECUACIÓN DEL PLANO
Funciones Vectoriales de Variable Real Pág.: 64 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
a. Ecuación vectorial. 0 0 0 1 2 3 1 2 3(x,y,z) (x ,y ,z ) t(v ,v ,v ) s(w ,w ,w )= + + , t,s R∈
b. Ecuaciones paramétricas. 0 1 1
0 2 2
0 3 3
x x tv sw
y y tv sw
z z tv sw
= + + = + + = + +
, t,s R∈
c. Ecuación cartesiana, general o implícita. Ax By Cz D 0+ + + =
d. Ecuación segmentaria. x y z
1a b c
+ + = .
Los valores a, b y c se denominan, respectivamente, abscisa, ordenada y cota en el
origen. Un plano también se puede hallar sabiendo un punto y solo un vector, siempre y
cuando ese vector sea perpendicular al plano (llamado vector normal), las coordenadas
de ese vector coinciden con los coeficientes A, B, C del plano; para hallar el término
independiente D del plano, sólo hay que sustituir las coordenadas del punto que nos den y
despejar D.
Ejemplo 18. Halle la ecuación del plano que contiene a los puntos (1,2,3), (0,1,1) y ( 2,3,2)−
Solución.
Vectores directores que generan el plano: u (1,2,3) (0,1,1) (1,1,2)= − = ; v (1,2,3) ( 2,3,2) (3, 1,1).= − − = −
Vector normal del plano: i j k
u v 1 1 2 (3,5, 4)3 1 1
× = = −−
.
Si D (1.3 2.5 4.3) 1= − + − = − , entonces la ecuación del plano será 3x 5y 4z 1+ − = .
Definición 18. Dos planos son paralelos si sus vectores normales son paralelos.
Definición 19. Dos planos son perpendiculares si sus vectores normales son
perpendiculares.
Definición 20. Una recta es paralela a un plano si los vectores director de la recta y
normal del plano son ortogonales.
Definición 21. Una recta es perpendicular a un plano si los vectores director de la recta y
normal del plano son paralelos.

SISTEMA DE COORDENADAS MÓVIL
Funciones Vectoriales de Variable Real Pág.: 65 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.25. SISTEMA DE COORDENADAS MÓVIL
Definición 22. En cada punto de la curva C definida por r(t) se define el vector tangente
unitario T(t), como r
T r 0r'(t)
(t) si '(t)'(t)
= ≠ .
Puesto que T(t) 1= entonces T T(t) '(t) 0• = (demostrado anteriormente), es decir
T '(t) es ortogonal a T(t) . Con base en lo anterior se dan las dos definiciones que siguen:
Definición 23. En cada punto de la curva r(t) se define el vector normal unitario como T
N T 0T
'(t)(t) si '(t)
'(t)= ≠ .
Observación 11. N(t) apunta hacia la parte cóncava de la curva.
Definición 24. Se define la recta normal a la curva en el punto r 0(t ) , donde T 00(t ) ≠ ,
como la recta que tiene vector director T 0'(t ) . Su ecuación será en consecuencia
NR r T 0 0( ) (t ) '(t ) con Rα = + α α ∈ .
Definición 25. En cada punto de la curva r(t) se define el vector binormal B(t) unitario y perpendicular tanto a T(t) como a N(t), por lo tanto debe ser B T N(t) (t) (t)= × .
Los vectores T, N y B conforman en cada punto de la curva un conjunto de vectores
mutuamente ortogonales; no son más que un sistema de coordenadas móvil que se
desplaza a lo largo de la curva r(t) y reciben por ello el nombre de triedro móvil.
Ejemplo 19. Demuestre que r r
Br r'(t) ''(t)
(t)'(t) ''(t)
×=×
.
Solución. Se tiene que r T'(t) s '(t) (t)= , de donde
r T T T T N''(t) s ''(t) (t) s '(t) '(t) s ''(t) (t) s '(t) '(t) (t)= + = + ,
luego

SISTEMA DE COORDENADAS MÓVIL
Funciones Vectoriales de Variable Real Pág.: 66 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
r r T T T N
T T T T N T B2 2
'(t) ''(t) s '(t) (t) (s ''(t) (t) s '(t) '(t) (t))
s '(t)s ''(t)( (t) (t)) (s '(t)) '(t) ( (t) (t)) (s '(t)) '(t) (t)
× = × +
= × + × =.
Si r r T2'(t) ''(t) (s '(t)) '(t)× = , entonces
r rB
r r'(t) ''(t)
(t)'(t) ''(t)
×=×
.
Por otro lado, se puede ver también que N B T(t) (t) (t)= × .
Ejemplo 20. Calcule los vectores T, N y B para la curva r 2 3(t) (t, t , t )= .
Solución. r 2'(t) (1,2t,3t )= y r ''(t) (0,2,6t)= .
Por tanto r
Tr
2
2 4
'(t) (1,2t,3t )(t)
'(t) 1 4t 9t= =
+ +.
Si i j k
r r 2 2'(t) ''(t) 1 2t 3t (6t , 6t,2)0 2 6t
× = = − ,
se tiene r r
Br r
2
4 2
'(t) ''(t) (3t , 3t,1)(t)
'(t) ''(t) 9t 9t 1
× −= =× + +
.
i j k
N B T
2
4 2 4 22
3 4 3
8 6 4 2
1 1(t) (t) (t) . 3t 3t 1
9t 9t 1 9t 4t 1 1 2t 3t
1( 9t 2t,1 9t ,6t 3t)
81t 117t 54t 13t 1
= × = −+ + + +
= − − − ++ + + +
Sea C una curva en 3R definida como la imagen de r(t). En cada punto r 0(t ) de la
curva los vectores T, N y B (triedro de Frenet) definen tres planos mutuamente
perpendiculares.
Definición 26. El plano osculador es el plano generado por T y N, luego su vector normal es B. Su ecuación es B r0 0(t ) ((x,y,z) (t )) 0• − = (ver figura 37).

SISTEMA DE COORDENADAS MÓVIL
Funciones Vectoriales de Variable Real Pág.: 67 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Definición 27. El plano rectificante es el plano generado por T y B, luego su vector normal es N. Su ecuación es N r0 0(t ) ((x, y,z) (t )) 0• − = (ver figura 37).
Definición 28. El plano normal es el plano generado por B y N, luego su vector normal es T. Su ecuación es T r0 0(t ) ((x,y,z) (t )) 0• − = (ver figura 37).
Ejemplo 21. Calcule el plano normal a la curva r 3 2 3(t) (3t t ,3t ,3t t )= − + en el punto (2,3,4).
Solución. Se debe hallar el valor de t para el cual r(t) (2,3,4)= . Para obtenerlo se resuelve el sistema
3
2
3
3t t 2
3t 3 t 1
3t t 4
− = = ⇒ = + =
.
r r r T2 2 1'(t) (3 3t ,6t,3 3t ) , '(1) (0,6,6) , '(1) 72 6 2 , (1) (0,1,1).
2= − + = = = =
La ecuación del plano normal en el punto indicado es:
12(0,1,1) (x 2,y 3,z 4) 0 y 3 z 4 0 y z 7 0• − − − = ⇒ − + − = ⇒ + − =
Figura 37. Sistema de coordenadas móvil

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 68 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.26. EJERCICIOS RESUELTOS
1. Sean las rectas
1 2y 2 x 2 y 1
L : x 1 z 1 , L : z 12 2 3+ − +− = = − + = = − .
Halle la ecuación de la recta que pasa por los puntos 1P y 2P tales que:
a. 1P es el punto de intersección de 1L con el plano xy.
b. 2P está sobre la recta 2L y su distancia a 1P es 50 .
Solución.
1
x 1 tL : y 2 2t
z 1 t
= + = − + = −
plano xy (z 0)= por tanto t 1= y 1P (2,0,0) .
2
x 2 2tL : y 1 3t
z 1 t
= + = − + = +
2 2 21 2d(P ,P ) (2 2t 2) ( 1 3t) (1 t) 50= + − + − + + + = .
Se tiene entonces: 2 2 2 2 24t 1 6t 9t 1 2t t 50 14t 4t 2 50 7t 2t 24 0+ − + + + + = ⇒ + + = ⇒ + − = .
Aplicando resolvente:
1 22 4 4.7.24 2 676 2 26 12
t t 2 , t .14 14 14 7
− ± + − ± − ±= = = ⇒ = − =
Por tanto:
2 238 29 19
P ( 2, 7, 1) ó P , , .7 7 7
− − −
Recta 1: R1 2P (2,0,0) y P ( 2, 7, 1) es : (t) (2,0,0) t( 4, 7, 1)− − − = + − − −
Recta 2: R1 2P (2,0,0) y P (38 / 7,29 / 7,19 / 7) es : (t) (2,0,0) t(24 / 7,29 / 7,19 / 7)= +
2. El vector posición de una partícula está dado por la función
r t t t(t) (e cos(t),e sen(t),e ).=
Demuestre que para todo rt Dom( )∈ el:
a. vector binormal forma ángulo constante con el eje z.
Solución.
Sean
r rt t t t t t'(t) (e (cos(t) sen(t)),e (cos(t) sen(t)),e ) , ''(t) ( 2e sen(t),2e cos(t),e )= − + = − .
Se tiene entonces:

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 69 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
i j k
r r
r r
t t t
t t t
2t
2t 2t
'(t) ''(t) e (cos(t) sen(t)) e (cos(t) sen(t)) e
2e sen(t) 2e cos(t) e
e (sen(t) cos(t), sen(t) cos(t),2)
'(t) ''(t) e 2 4 e 6.
× = − +
−
= − − −
× = + =
De modo que r r
Br r'(t) ''(t) (sen(t) cos(t), sen(t) cos(t),2)
(t)'(t) ''(t) 6
× − − −= = −×
.
Aplicando fórmula:
B kB k
B k(t)
arccos arccos( (t) ) arccos(2 / 6).(t)
•θ = = • =
b. plano rectificante es perpendicular al plano xy.
Solución. r
Tr
t
t
'(t) e (cos(t) sen(t),cos(t) sen(t),1) (cos(t) sen(t),cos(t) sen(t),1)(t) .
'(t) 3e 3
− + − += = =
i j kN B T
1(t) (t) (t) (sen(t) cos(t)) ( sen(t) cos(t)) 2
18 (cos(t) sen(t)) (cos(t) sen(t)) 1
3(cos(t) sen(t), sen(t) cos(t),0)
181
(cos(t) sen(t), sen(t) cos(t),0)2
= × = − − − −− +
= + −
= + − .
Se puede ver que N k(t) 0• = .
3. Halle los puntos de la curva r 2 3(t) (t, t , t /3)= donde los planos osculadores pasan por el
punto (1, 1,0).−
Solución.
Sean
r r2'(t) (1,2t, t ) , ''(t) (0,2,2t)= = .
Se tiene entonces: i j k
r r r r2 2 4 2 4 2'(t) ''(t) 1 2t t (2t , 2t,2) '(t) ''(t) 4t 4t 4 2 t t 1.0 2 2t
× = = − ⇒ × = + + = + +
De modo que r r
Br r
2 2
4 2 4 2
'(t) ''(t) 2(t , t,1) (t , t,1)(t) .
'(t) ''(t) 2 t t 1 t t 1
× − −= = =× + + + +

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 70 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
La ecuación de los planos osculadores que pasan por el punto (1, 1,0)− es
2
4 2
(t , t,1)(x 1,y 1,z) 0.
t t 1
− • − + =+ +
Sea el punto (x,y,z) un punto de la curva r 2 3(t) (t, t , t /3)= . Se obtiene la ecuación 2
2 3 2 2 3 2 3
4 2
(t , t,1)(t 1, t 1, t /3) t (t 1) t(t 1) t /3 0 t t t / 3 0
t t 1
− • − + = − − + + = ⇒ − − + =+ +
.
Al resolver
2 3 3 2 2 3 21t t t /3 0 t 3t 3t 0 t(t 3t 3) 0 t 0 , t .
2±− − + = ⇒ − − = ⇒ − − = ⇒ = =
Los puntos son: r(0) (0,0,0)= ,
r 3 21 3 21 15 3 21
, ,9 2 21 ,2 2 2
+ + += +
r3 21 3 21 15 3 21
, ,9 2 212 2 2
− − −= −
.
1.27. CURVATURA
Definición 29. La curvatura es un concepto importante en el estudio de la geometría
diferencial y del movimiento curvilíneo. Algunas definiciones de la curvatura:
• Es la medida de la tendencia de una curva a desviarse de la línea recta.
• Es la medida de cómo la curva se escapa de la recta tangente.
• Es una medida de cuánto se dobla una curva.
• Es una medida de cuán curva es una curva.
• Es una medida de qué tan rápido cambia la curva de dirección en un punto.
• Es la magnitud de la razón de cambio del vector tangente unitario con respecto a la
longitud de arco.
De acuerdo a la última definición se tiene que
TT Tr
'(t)d / dt '(t)(t)
ds / dt s '(t) '(t)κ = = = .

CURVATURA Funciones Vectoriales
de Variable Real Pág.: 71 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 22. Demuestre que r r
r3
'(t) ''(t)(t)
'(t)
×κ = .
Solución.
Se tiene T T N N'(t) '(t) (t) (t)s '(t) (t)= = κ , r T'(t) s '(t) (t)= ,
r T T T N2''(t) s ''(t) (t) s '(t) '(t) s ''(t) (t) [s '(t)] (t) (t)= + = + κ
r r T T N
T T T N B
2
3 3
'(t) ''(t) s '(t) (t) [s ''(t) (t) [s '(t)] (t) (t)]
s '(t)s ''(t)( (t) (t)) [s '(t)] (t)( (t) (t)) [s '(t)] (t) (t)
× = × + κ
= × + κ × = κ
Luego
r r r 33'(t) ''(t) [s '(t)] k(t) '(t) k(t)× = = .
Por lo tanto r r
r3
'(t) ''(t)(t)
'(t)
×κ = .
Definición 30. Sea y f(x)= , se define la curvatura como la tasa a la que la curva se dobla
respecto de la pendiente (tangente del ángulo de inclinación) de la recta tangente.
De acuerdo a la definición (x) d / dsκ = θ . Se tiene que
d d dx d / dx.
ds dx ds ds / dxθ θ θ= = .
Ahora bien
2
d f ''(x)tg( ) f '(x) arctg(f '(x))
dx 1 [f '(x)]
θθ = ⇒ θ = ⇒ =+
, 2ds1 [f '(x)]
dx= + .
De modo que
2 3 2
f ''(x)(x)
(1 [f '(x)] )κ =
+.
Sea r(t) (x(t),y(t))= , se sabe de cursos anteriores de Cálculo que
dy dy / dt y '(t)
f '(x)dx dx / dt x '(t)
= = =

CURVATURA Funciones Vectoriales
de Variable Real Pág.: 72 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
y ''(t)x '(t) y '(t)x ''(t)dyd2 2(x '(t))dt dx
2 dx 3dt
( )d y y ''(t)x '(t) y '(t)x ''(t)f ''(x)
x '(t)dx (x '(t))
−−= = = = .
De modo que
( ) ( )
y ''(t)x '(t) y '(t)x ''(t)3(x '(t))
3 2 3 22 2 2y '(t)x '(t)
y ''(t)x '(t) y '(t)x ''(t)(t)
(x '(t)) (y '(t))1
−−
κ = = ++
.
Observación 12. La curvatura es independiente de la parametrización que se use para la
curva.
1.28. CURVATURA PARA UNA RECTA. CURVATURA PARA UNA CIRCUNFERENCIA
La ecuación vectorial de una recta viene dada por
0r P v(t) t= + .
De modo que r v r 0'(t) y ''(t)= = ,
luego para una recta (t) 0κ = .
Sea r(t) (h acos(t),k asen(t))= + +
la función vectorial cuya curva es una circunferencia centrada en el punto (h,k) y de radio a.
Entonces se tiene que:
x(t) h acos(t) , x '(t) asen(t) , x ''(t) acos(t)= + = − = −
y(t) k asen(t) , y '(t) acos(t) , y ''(t) asen(t)= + = = −
Por lo tanto
( ) ( )2 2 2 2 2
3 2 3 2 32 2 2 2 2 2
a sen (t) a cos (t)y ''(t)x '(t) y '(t)x ''(t) a 1(t)
aa(x '(t)) (y '(t)) a sen (t) a cos (t)
+−κ = = = =
+ +.

COMPONENTES TANGENCIAL Y NORMAL DE LA ACELERACIÓN
Funciones Vectoriales de Variable Real Pág.: 73 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.29. COMPONENTES TANGENCIAL Y NORMAL DE LA ACELERACIÓN
Definición 31. Si el parámetro t es el tiempo entonces r ''(t) es la aceleración de una
partícula con posición instantánea r(t). Los coeficientes de los vectores unitarios T(t) y N(t)
son respectivamente las componentes tangencial y normal de la aceleración.
Observación 13. Como
r T T N T N2''(t) s ''(t) (t) s '(t) '(t) (t) s ''(t) (t) (s '(t)) (t) (t)= + = + κ
entonces la componente tangencial de la aceleración viene dada por s ''(t) (derivada de la
función rapidez) y la componente normal de la aceleración es 2(s '(t)) (t)κ (producto de la
rapidez al cuadrado por la curvatura). Si se proyecta el vector r ''(t) sobre los vectores T(t) y
N(t) se tiene
(t) (t)''(t) comp(proy (t)) (t) comp(proy (t)) (t)= +T Nr r'' T r'' N
de modo que
r r T T r N N''(t) ''(t) (t) (t) ''(t) (t) (t)= • + • ,
donde r T''• y r N''• son las componentes tangencial y normal de la aceleración
respectivamente.
Ejemplo 23. Se definen Tc y Nc como las componentes tangencial y normal de la aceleración
respectivamente. Demuestre que r r
rT'(t) ''(t)
c (t)'(t)•= y
r r
rN
'(t) ''(t)c (t)
'(t)
×= .
Solución. Se sabe que Tc (t) s ''(t) (t) (t)= = •r'' T , de modo que
T(t) '(t) ''(t)
c (t) (t)(t) '(t)
•= • =r' r rr''
r' r.
Se sabe que 2Nc (t) (s '(t)) (t)= κ , de modo que

COMPONENTES TANGENCIAL Y NORMAL DE LA ACELERACIÓN
Funciones Vectoriales de Variable Real Pág.: 74 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
22
N 3
'(t) ''(t) '(t) ''(t)c (t) (s '(t)) (t) '(t)
'(t)'(t)
× ×= κ = =
r r r rr
rr
1.30. CIRCUNFERENCIA OSCULATRIZ Y CENTRO DE CURVATURA
Definición 32. Se define la circunferencia osculatriz a una curva C en un punto r 0P (t )= ,
como la circunferencia que pasa por P y tiene igual curvatura que la curva.
Definición 33. La curvatura de una circunferencia de radio a es 1
aκ = , de donde el radio de
la circunferencia osculatriz debe ser 1a κ= .
Definición 34. El centro de curvatura, o sea el centro de la circunferencia osculatriz está en la dirección del vector normal N(t) y está dado por
C r N0 0 0(t ) (t ) a (t )= + .
Ejemplo 24. Halle la circunferencia osculatriz al gráfico de 2y x= para x 1= y para x 0= .
Solución.
Se tiene que
2 3 2 2 3 /2
2 2(x)
(1 [2x] ) (1 4x )κ = =
+ +.
Una parametrización para la curva es r 2(t) (t, t )= . De modo que:
T T
T N
2 2 2 2
2 2 2 2
(1,2t) 4t 1(t) '(t) (1,2t) (0,2)
1 4t (1 4t ) 1 4t 1 4t1 ( 4t,2) ( 2t,1)
'(t) ( 4t,2) (t)(1 4t ) 1 4t 16t 4 4t 1
= ⇒ = − ++ + + +
− −⇒ = − ⇒ = =
+ + + +
N C
N C
2 5 5 ( 2,1) 5 5 ( 2,1) 7t 1 (1) a(1) (1) (1) (1,1) . 4,
2 2 25 5 5 51 1 1
t 0 (0) 2 a(0) (0) (0,1) (0) (0,0) .(0,1) 0,2 2 2
− − = ⇒ κ = ⇒ = ⇒ = ⇒ = + = −
= ⇒ κ = ⇒ = ⇒ = ⇒ = + =
Por lo tanto
( ) 2 2
2 27 125 1 1t 1 x 4 y ; t 0 x y
2 4 2 4 = ⇒ + + − = = ⇒ + − =
.

TORSIÓN Funciones Vectoriales
de Variable Real Pág.: 75 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.31. TORSIÓN
Definición 35. Se denomina curva plana al recorrido de una función vectorial tal que todos
sus puntos se encuentran en un mismo plano.
Definición 36. Se denomina curva alabeada a aquella curva tal que no todos sus puntos
están en un mismo plano.
Definición 37. La torsión también es un concepto importante en el estudio de la geometría
diferencial y del movimiento curvilíneo. Algunas definiciones de la torsión: • Caracteriza la forma en que una curva alabeada dada difiere de una curva plana.
• Caracteriza la velocidad con que la curva se separa de su plano osculador.
• Es una medida del torcimiento de la curva respecto al plano osculador. • Es una medida de cuanto se aleja la curva del plano osculador.
Se tiene entonces que BB Br
'(t)d / dt '(t)(t)
ds / dt s '(t) '(t)τ = = = .
TEOREMA 14. El vector B '(t) es paralelo a N(t).
Demostración. B T N B T N T N T N(t) (t) (t) '(t) '(t) (t) (t) '(t) (t) '(t)= × ⇒ = × + × = × .
Se tiene que B B'(t) (t)⊥ y B T'(t) (t)⊥ , por lo tanto B N'(t) (t)= λ .
Observación 14. • (t) 0 tτ = ∀ si y sólo si la curva es plana y el plano que la contiene es el plano osculador.
• B 0(t) 0 t '(t)τ = ∀ ⇒ = de modo que B 1 2 3(t) (b ,b ,b )= , lo que significa que el plano
osculador es el mismo siempre.
1.32. FÓRMULAS DE FRENET
A continuación se tienen las siguientes fórmulas:
B NT N
N B T
'(t) (t)s '(t) (t)'(t) (t)s '(t) (t)
'(t) (t)s '(t) (t) (t)s '(t) (t)
= −τ = κ = τ − κ

FÓRMULAS DE FRENET Funciones Vectoriales
de Variable Real Pág.: 76 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
que se conocen con el nombre de fórmulas de Frenet, por el matemático francés F. Frenet.
Demostración: B N'(t) (t)s '(t) (t).= −τ B N B'(t) (t) '(t) (t)s '(t) (t)s '(t)= λ ⇒ = λ ⇒ τ = λ ⇒ λ = ±τ ,
por convención se toma (t)s '(t)λ = −τ , de modo que B' N(t) (t)s'(t) (t).= −τ
T N'(t) (t)s '(t) (t).= κ Fue demostrada cuando se habló de curvatura.
N B T'(t) (t)s '(t) (t) (t)s '(t) (t)= τ − κ
N B T N B T B T N T B N B T(t) (t) (t) '(t) '(t) (t) (t) '(t) (t)s '(t) (t) (t) (t) (t)s '(t) (t)
(t)s '(t) (t) (t)s '(t) (t)= × ⇒ = × + × ⇒ −τ × + × κ
⇒ τ − κ
Con base en estas fórmulas se deduce una expresión para la torsión en función de
cualquier parámetro:
r r r
r r 0r r
2
( '(t) ''(t)) '''(t)(t) si '(t) ''(t)
'(t) ''(t)
× •τ = × ≠×
.
Ejemplo 25. Demuestre que r r r
r r 0r r
2
( '(t) ''(t)) '''(t)(t) , '(t) ''(t)
'(t) ''(t)
× •τ = × ≠×
.
Solución.
Se sabe que
r r r B3'(t) ''(t) '(t) (t) (t)× = κ ,
r r r 3'(t) ''(t) '(t) (t)× = κ
y
r r T r N2''(t) '(t) ' (t) '(t) (t) (t)= + κ .
De modo que
r r r r B r3
( '(t) ''(t)) '''(t) '(t) (t)( (t) '''(t))× • = κ • . (*)
r r T r T N N N2 2'''(t) '(t) '' (t) '(t) ' '(t) 2 r '(t) r '(t) ' (t) (t) r '(t) '(t) (t) r '(t) (t) '(t)= + + κ + κ + κ
Como B es ortogonal a T y a N,
B r r B T B N2(t) '''(t) '(t) '( (t) '(t)) r '(t) (t)( (t) '(t))• = • + κ • .
Las fórmulas de Frenet T r N'(t) (t) '(t) (t)= κ y N B T'(t) (t) r '(t) (t) (t) r '(t) (t)= τ − κ
permiten obtener
B r r B r r r3 2 3
(t) '''(t) '(t) (t) (t) (t) '(t) (t) (t) '(t) ''(t) (t)• = τ κ = τ κ = × τ
Al sustituir en la expresión (*) se tiene la expresión
r r r r r r3
( '(t) ''(t)) '''(t) '(t) (t) '(t) ''(t) (t)× • = κ × τ .

FÓRMULAS DE FRENET Funciones Vectoriales
de Variable Real Pág.: 77 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Como se sabe que
r r
r3
'(t) ''(t)(t)
'(t)
×κ = ,
entonces
r r r r r2
( '(t) ''(t)) '''(t) '(t) ''(t) (t)× • = × τ y
r r r r r 0
r r2
( '(t) ''(t)) '''(t)(t) , '(t) ''(t)
'(t) ''(t)
× •τ = × ≠×
.
Ejemplo 26. Dada la curva definida por r 3 3 2 3(t) (t , t t , t t)= + − + , calcule los puntos en los
cuales la torsión es cero.
Solución. r r r2 2 2'(t) (3t ,3t 2t, 3t 1) ; ''(t) (6t,6t 2, 6t) ; '''(t) (6,6, 6)= + − + = + − = −
i j k
r r 2 2 2 2 2'(t) ''(t) 3t 3t 2t 3t 1 ( 6t 6t 2,6t, 6t )6t 6t 2 6t
× = + − + = − − − −+ −
r r r
r r r r r r
2 2
2 2 2
( '(t) ''(t)) '''(t) ( 6t 6t 2,6t, 6t )• (6,6, 6) 12(t)
'(t) ''(t) '(t) ''(t) '(t) ''(t)
× • − − − − −τ = = = −× × ×
.
De modo que no hay valor de t para el cual la torsión sea cero ( 0τ = ).
Ejemplo 27. La posición de una partícula es r(t) (1 sen(t),cos(t),2 cos(t) sen(t))= + −
a. Demuestre que la partícula se mueve en un plano.
b. Encuentre la ecuación del plano.
Solución. a. Se debe probar que (t) 0τ = :
r '(t) (cos(t), sen(t), 2sen(t) cos(t))= − − − , r ''(t) ( sen(t), cos(t), 2cos(t) sen(t))= − − − + ,
r '''(t) ( cos(t), sen(t),2sen(t) cos(t))= − +
i j kr r'(t) ''(t) cos(t) sen(t) 2sen(t) cos(t) ( 1,2, 1)
sen(t) cos(t) 2cos(t) sen(t)× = − − − = − −
− − − +
r r r( '(t) ''(t)) '''(t) ( 1,2, 1) ( cos(t),sen(t),2sen(t) cos(t)) 0× • = − − • − + =
b. Si se toman tres puntos: r r r(0) (1,1,2) ; ( /2) (2,0, 1) ; ( ) (1, 1, 2)= π = − π = − −
El vector normal del plano será i j k1 1 3 ( 2,4, 2)0 2 4− = − − .
Se tiene ( 2,4, 2) (x 1,y 1,z 2) 0 2x 2 4y 4 2z 4 0 x 2y z 1− − • − − − = ⇒ − + + − − + = ⇒ − + = .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 78 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.33. EJERCICIOS RESUELTOS
12. Determine los puntos de máxima y mínima curvatura de una elipse centrada en el origen
con eje focal horizontal y semiejes a y b (a b)> .
Solución.
Parametrizando la elipse y calculando otros vectores se tiene r r r (t) (acos(t),bsen(t)), '(t) ( asen(t),b cos(t)), ''(t) ( acos(t), bsen(t)), t 0,2= = − = − − ∈ π
κ = +
3 /22 2 2 2
ab(t)
a sen (t) b cos (t).
Si 2 2 2 2f(t) a sen (t) b cos (t)= + entonces los puntos donde f(t) alcance el valor máximo
(mínimo) equivalen a los puntos donde la función curvatura alcance el valor mínimo
(máximo). 2 2 2 2 2 2f '(t) 2a sen(t)cos(t) 2b sen(t)cos(t) 2(a b )sen(t)cos(t) (a b )sen(2t)= − = − = − .
2 2 32 2f '(t) (a b )sen(2t) 0 t 0, , ,π π= − = ⇒ = π . 2 2f ''(t) 2(a b )cos(2t)= − .
f ''(0) f ''( ) 0 (mínimo para f(t), máximo para (t))= π > κ . Curvatura máxima a/b.
32 2f ''( ) f ''( ) 0 (máximo para f(t), mínimo para (t))π π= < κ . Curvatura mínima b/a.
Los puntos de máxima y mínima curvatura de la elipse se encuentran ubicados en sus
vértices.
13. Dada la curva
r3
2t(t) t, t
3
= −
:
a. Calcule el punto de radio de curvatura mínimo.
Solución.
r' r''2(t) (t 1,2t) ; (t) (2t,2)= − = 2 2 2 2
2 2 2 3/2 4 2 3/2 2 3 2 2
2(t 1) 4t 2t 2 2(t 1) 2(t)
((t 1) 4t ) (t 2t 1) (t 1) (t 1)
− − − − +κ = = = =− + + + + +
2 2 3 2 2 2
2 4 2 3 2 6
2 2 2 2 2 2
2 4 2 4 2 4 2 4
8(t 1)t 8t 8(t 1) 48t (t 1)'(t) ''(t)
(t 1) (t 1) (t 1)
8(t 1) 48t 8t 8 48t 8 40t 8(5t 1)''(t)
(t 1) (t 1) (t 1) (t 1)
+ + − +⇒ κ = − = − ⇒ κ = −
+ + +
+ − + − − −⇒ κ = − = − = − =
+ + + +
'(t) 0 t 0 ''(0) 8 0 máximoκ = ⇒ = ⇒ κ = − < ⇒ .
Por lo tanto el punto de máxima curvatura es r(0) (0,0)= .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 79 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Encuentre las ecuaciones paramétricas de sus centros de curvatura.
Solución.
r r rN
r r r
2 2 2 4
2 22 2
(0,0, 2t 2 (t 1,2t,0)'(t) ''(t) '(t) (4t(t 1), 2(t 1),0)(t)
'(t) ''(t) '(t) 2(t 1)(0,0, 2t 2 (t 1,2t,0)
− − × −× × + − − = = =× × +− − × −
NC r
3 2 2 2 42
2 2
3 2 4 3 42 2 2
3 4 2
(t) t (t 1) (4t(t 1), 2(t 1),0)(t) (t) t, t ,0 .
(t) 3 2 2(t 1)
t (4t(t 1), 2(t 1)) t t 1t, t t t(t 1), t
3 4 3 2
4t t 2t 1,
3 2
+ + − −= + = − + κ +
+ − − −= − + = − + + −
− −= −
14. Sea la curva r(t) (3cos(t),4cos(t),5sen(t))= .
a. Demuestre que r(t) es una curva plana y encuentre la ecuación del plano que la
contiene.
Solución. Paso 1. Cálculo de r'(t) y r''(t) .
r'(t) ( 3sen(t), 4sen(t),5cos(t))= − − , r''(t) ( 3cos(t), 4cos(t), 5sen(t))= − − −
Paso 2. Cálculo de B(t).
r rB
r r
'(t) ''(t) ( 3sen(t), 4sen(t),5cos(t)) ( 3cos(t), 4cos(t), 5sen(t))(t)
'(t) ''(t) ( 3sen(t), 4sen(t),5cos(t)) ( 3cos(t), 4cos(t), 5sen(t))
(20, 15,0) (20, 15,0) 4 3, ,0 .
25 5 5400 225
× − − × − − −= =× − − × − − −
− − = = = − +
Como B(t) es un vector constante, entonces la curva r(t) es plana.
Paso 3. Cálculo de la ecuación del plano osculador. Se busca un punto arbitrario de la curva, por ejemplo para t 0= , r(0) (3,4,0)= .
La ecuación del plano osculador es B r(t) ((x,y,z) (0)) 0• − = , de modo que
4 3 4 3, ,0 ((x,y,z) (3,4,0)) 0 , ,0 (x 3,y 4,z) 0
5 5 5 5
4 3(x 3) (y 4) 0 4(x 3) 3(y 4) 0
5 54x 1
− • − = ⇒ − • − − =
⇒ − − − = ⇒ − − − =
⇒ − 2 3y 12 0 4x 3y 0− + = ⇒ − =
b. Encuentre la componente tangencial de r'(t) y la componente binormal de r''(t) .
Solución. Paso 1. Cálculo de T(t) .
rT
r 2 2 2
'(t) ( 3sen(t), 4sen(t),5cos(t)) 3sen(t) 4sen(t)(t) , , cos(t)
5 5'(t) 9sen (t) 16sen (t) 25cos (t)
− − = = = − − + +
.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 80 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Paso 2. Cálculo de la componente tangencial de r'(t) .
r' T
2 2
3sen(t) 4sen(t)(t) (t) ( 3sen(t), 4sen(t),5cos(t)) , ,cos(t)
5 5
5sen (t) 5cos (t) 5
• = − − • − −
= + =
Paso 3. Cálculo de la componente binormal de r''(t) .
r'' B4 3
(t) (t) ( 3cos(t), 4cos(t), 5sen(t)) , ,0 05 5 • = − − − • − =
.
15. Una curva C está definida por
2 2
y sen(x) x 0,
2y x 2 x 0,
x (y 1) 1 x 1,0
= ∈ π = − ∈ π π + + = ∈ −
.
Encuentre la ecuación cartesiana de la circunferencia osculatriz en el punto ( / 2,1)π .
Solución. Si se sustituye en la curva r(t) (t, sen(t))= , el parámetro t por / 2π , se puede verificar
que r( / 2) ( / 2,1)π = π , de modo que se encontrará la circunferencia osculatriz para
t / 2= π .
Paso 1. Cálculo de la curvatura en t / 2= π .
2 22 2 3/2 2 3/2
2 2
f ''( ) sen( )k( ) 1
(1 (f '( )) ) (1 (cos( )) )
π ππ
π π= = =
+ +.
Paso 2. Cálculo del vector normal en t / 2= π .
r r rN
r r r
2 2 2 2 2 22
2 2 2 2 2 2
'( ) ''( ) '( ) (1,cos( ),0) (0, sen( ),0) (1,cos( ),0)( )
'( ) ''( ) '( ) (1,cos( ),0) (0, sen( ),0) (1,cos( ),0)
(1,0,0) (
π π π π π ππ
π π π π π π
× × × − × = = × × × − ×
×=
0, 1,0) (1,0,0) (0,0, 1) (1,0,0)(0,0, 1) (1,0,0)(1,0,0) (0, 1,0) (1,0,0)
(0, 1,0)
− × − × =− ×× − ×
= −
Paso 3. Cálculo del radio y el centro de curvatura en t / 2= π .
Radio de curvatura: 1
R( / 2) 1( / 2)
π = =κ π
.
Centro de curvatura: C( / 2) ( / 2,1) 1.(0, 1) ( / 2,0)π = π + − = π .
Ecuación cartesiana de la circunferencia osculatriz: 2 2(x / 2) y 1− π + = .
La circunferencia osculatriz y la curva se pueden apreciar en la figura 38.
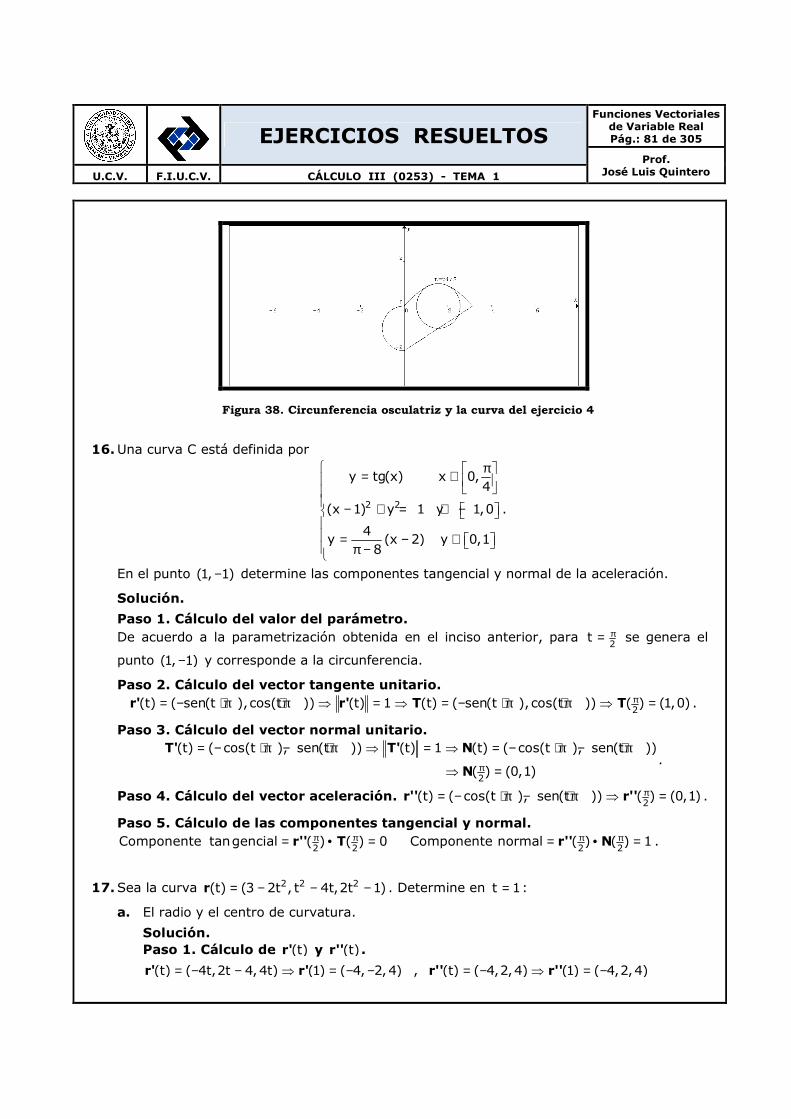
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 81 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 38. Circunferencia osculatriz y la curva del ejercicio 4
16. Una curva C está definida por
2 2
y tg(x) x 0,4
(x 1) y 1 y 1,0
4y (x 2) y 0,1
8
π = ∈
− + = ∈ − = − ∈ π −
.
En el punto (1, 1)− determine las componentes tangencial y normal de la aceleración.
Solución.
Paso 1. Cálculo del valor del parámetro. De acuerdo a la parametrización obtenida en el inciso anterior, para
2t π= se genera el
punto (1, 1)− y corresponde a la circunferencia.
Paso 2. Cálculo del vector tangente unitario. r' r' T T
2(t) ( sen(t ),cos(t )) (t) 1 (t) ( sen(t ), cos(t )) ( ) (1,0)π= − + π + π ⇒ = ⇒ = − + π + π ⇒ = .
Paso 3. Cálculo del vector normal unitario. T' T' N
N2
(t) ( cos(t ), sen(t )) (t) 1 (t) ( cos(t ), sen(t ))
( ) (0,1)π
= − + π − + π ⇒ = ⇒ = − + π − + π
⇒ =.
Paso 4. Cálculo del vector aceleración. r'' r''2
(t) ( cos(t ), sen(t )) ( ) (0,1)π= − + π − + π ⇒ = .
Paso 5. Cálculo de las componentes tangencial y normal. r'' T r'' N
2 2 2 2Componente tangencial ( ) ( ) 0 Componente normal ( ) ( ) 1π π π π= • = = • = .
17. Sea la curva r 2 2 2(t) (3 2t , t 4t,2t 1)= − − − . Determine en t 1= :
a. El radio y el centro de curvatura.
Solución. Paso 1. Cálculo de r'(t) y r''(t) .
r' r'(t) ( 4t,2t 4,4t) (1) ( 4, 2,4)= − − ⇒ = − − , r'' r''(t) ( 4,2,4) (1) ( 4,2,4)= − ⇒ = −

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 82 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Paso 2. Cálculo del radio de curvatura. r r
r
4
3 3 3 3 3 3
3
'(1) ''(1) ( 4, 2,4) ( 4,2,4) ( 16,0, 16) 16 2 2 2(1)
6 2 3'(1) ( 4, 2,4) ( 4, 2,4)
2 2 2 2273
27 27 2radio
42 2
× − − × − − −κ = = = = =
− − − −
= =
⇒ = =
Paso 3. Cálculo del centro de curvatura. r r r
Nr r r
5
5 5
'(1) ''(1) '(1) ( 16,0, 16) ( 4, 2,4) ( 32,128,32) 2 ( 1,4,1)(1)
'(1) ''(1) '(1) 16 2.6 2 .3 2 2 .3 2
× × − − × − − − − = = = =× ×
( 1,4,1)
3 2
−=
Centro: N
C r(1) 27 2( 1,4,1) 9 5 13
(1) (1) (1, 3,1) (1, 3,1) ( 1,4,1) ,12,(1) 4 4 44.3 2
− = + = − + = − + − = − κ .
b. La ecuación del plano osculador y del plano normal.
Solución. Paso 1. Cálculo de T(1) y B(1) .
rT
r'(1) ( 4, 2,4)
(1)6'(1)
− −= = .
B T N2(2,1, 2) ( 1,4,1) (9,0,9) (1,0,1)
(1) (1) (1)6 3 2 9 2 2
− − −= × = × = − = −
Paso 2. Ecuación del plano osculador. (1,0,1)
(x 1,y 3,z 1) 0 x z 2 02
− • − + − = ⇒ + − =
Paso 3. Ecuación del plano normal. (2,1, 2)
(x 1,y 3,z 1) 0 2x y 2z 3 03
−− • − + − = ⇒ + − + =
18. Sea r 2 3(t) (2t, 3t , t )= .
a. Halle (t) / (t)τ κ .
Solución. Paso 1. Cálculo de r' r'' r'''(t), (t) y (t) .
r' r'' r'''2(t) (2,2 3t,3t ). (t) (0,2 3,6t). (t) (0,0,6).= = =

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 83 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Paso 2. Cálculo de (t)τ .
r r r
r r
2
2 4 2 4 2
4 2 2 2
( '(t) ''(t)) '''(t) (6 3t , 12t,4 3) (0,0,6) 24 3(t)
108t 144t 48 108t 144t 48'(t) ''(t)
2 3 2 3.
9t 12t 4 (3t 2)
× • − •τ = = =+ + + +×
= =+ + +
Paso 3. Cálculo de (t)κ .
r r
r
4 2 2
3 2 4 3/2 2 3 2 2
'(t) ''(t) 108t 144t 48 2 3(3t 2) 2 3(t)
(4 12t 9t ) (3t 2) (3t 2)'(t)
× + + +κ = = = =+ + + +
.
Paso 4. Cálculo de (t) / (t)τ κ . r(t) / (t) 1 (t) (t) t D( )τ κ = ⇒ τ = κ ∀ ∈ .
b. Calcule W T' N' B'(0) (0) (0) (0)= + + .
Solución.
De acuerdo a las fórmulas de Frenet-Serret y en concordancia con el resultado anterior
se tiene que: W T' N' B' N B T N N B T N
B T
B T B
(0) (0) (0) (0) (0)s '(0) (0) (0)s '(0) (0) (0)s '(0) (0) (0)s '(0) (0)(0)s '(0) (0) (0)s '(0) (0) (0)s '(0) (0) (0)s '(0) (0)
(0)s '(0) (0) (0)
32 (0) (0) 3 (0
2
= + + = κ + τ − κ − τ= κ + κ − κ − κ= κ −
= − = T(0,0,4 3) (2,0,0)
) (0) 3 3( 1,0,1)24 3
− = − = −
19. Sea r(t) una curva tal que r '(t) k= . Demuestre que la aceleración es proporcional a la
curvatura de r(t).
Solución. r r r'(t) k '(t) ''(t) 0= ⇒ • = .
r r r r r r
r r r3 3 2 2
'(t) ''(t) '(t) ''(t) ''(t) ''(t)(t) .
k'(t) '(t) '(t)
×κ = = = =
20. La espiral de Cornu viene dada por
r t t
2 2
2 20 0
(t) cos( )d , sen( )d , t Rπα πα = α α ∈ ∫ ∫ .
Calcule su longitud de arco entre t 0= y t a= , su curvatura en t a= y exprese la relación
existente entre la curvatura y la longitud de arco.
Solución.
r' r'' 2 2 2 2t t t t
2 2 2 2(t) (cos( ),sen( )) , (t) ( t.sen( ), t.cos( ))π π π π= = −π π

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 84 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
a
0
s d a= α =∫ .
r' r'' r' r'' r''
r' r' r'3 3 2
(a) (a) (a) (a) (a)(a) a
(a) (a) (a)
×κ = = = = π .
Relación entre curvatura y longitud de arco: (s) sκ = π .
21. Encuentre la ecuación de la circunferencia osculatriz a la hipérbola equilátera xy 1= en los
puntos donde el radio de curvatura sea mínimo.
Solución.
Sea 1
f(x)x
= ,
entonces
2
1f '(x)
x= − y
3
2f ''(x)
x= .
De modo que:
2 2 33 3x x2 3 2 3 2 4 3 2 4 3 21 (x 1)
4x 6x
f ''(x) 2x(x) , si x 0, (x)
(1 (f '(x)) ) (1 ) (x 1)+κ = = > κ = =
+ + +
Radio de curvatura mínimo Curvatura máxima⇒
2 4 3 2 3 4 1 2 33 2 4 1 2 4 42
4 3 4 3
2 4 1 2 4
4 3
6x (x 1) 2x . (x 1) .4x 6x (x 1) (x 1 2x )'(x)
(x 1) (x 1)
6x (x 1) (1 x )
(x 1)
+ − + + + −κ = =+ +
+ −=+
2 4 1 2 4'(x) 0 6x (x 1) (1 x ) 0 x 0 , x 1.κ = ⇒ + − = ⇒ = =
En x 0, la curvatura es mínima, (0) 0. En x 1, la curvatura es máxima, (1) 2 / 2.= κ = = κ =
Como f(x) es impar se tiene en x 1, la curvatura es máxima, ( 1) 2 /2.= − κ − =
Una parametrización para la curva es r(t) (t,1 / t)= .
rT
r
12t
14t
(1, )'(t)(t)
'(t) 1
−= =
+
Ecuación de la circunferencia osculatriz para t 1:=
Radio de curvatura a 2.= = C r NCentro de curvatura (1) (1) 2 (1)= = + .
T N(1, 1) (1,1)
(1) (1)2 2
−= ⇒ = .
C r N(1) (1) 2 (1) (1,1) (1,1) (2,2)= + = + = .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 85 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Circunferencia osculatriz: 2 2(x 2) (y 2) 2− + − = .
Ecuación de la circunferencia osculatriz para t 1:= −
Radio de curvatura a 2.= = C r NCentro de curvatura ( 1) 2 ( 1)= = − + − .
T N(1, 1) ( 1, 1)
( 1) ( 1)2 2
− − −− = ⇒ − = .
C r N( 1) 2 ( 1) ( 1, 1) ( 1, 1) ( 2, 2)= − + − = − − + − − = − − .
Circunferencia osculatriz: 2 2(x 2) (y 2) 2+ + + = .
22. La circunferencia 2 2x y 5+ = es osculatriz en el punto (1,2) a una parábola, cuyo eje es
paralelo al eje x. Halle la ecuación de esta parábola.
Solución. Una parábola de eje paralelo al eje x tiene ecuación de la forma 2x ay by c= + + .
Evaluando en el punto de interés se obtiene la relación
1 4a 2b c= + + (*)
De modo que si se hace t y= se obtiene r 2(t) (at bt c, t)= + + , t R∈ . De esta forma se
generan los vectores r '(t) (2at b,1)= + y r ''(t) (2a,0)= .
En el punto de interés (t 2)= , se tienen los vectores
r(2) (4a 2b c,2)= + + , r '(2) (4a b,1)= + y r ''(2) (2a,0)= .
Aplicando la ecuación de centro de curvatura se tiene
C N N( 1, 2)
(2) (1,2) 5 (2) (0,0) (2)5
− −= + = ⇒ = .
Como
T2
(4a b,1)(2)
(4a b) 1
+=+ +
,
entonces T N(2) (2) 0 4a b 2 0 4a b 2• = ⇒ − − − = ⇒ + = − . (**)
Por otro lado,
32
2a 1(2)
5(4a b) 1
κ = = + +
.
Al usar la relación (**) se tiene
3
2a 1 52a 5 a
255= ⇒ = ⇒ = ± .
Usando las relaciones (*) y (**) se tienen dos parábolas:
Parábola 1. 2 25 5 8 2 72 2 5 5 5a , b 8 , c 5 x y 8y 5 (y ) (x )= − = = − ⇒ = − + − ⇒ − = − − .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 86 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Parábola 2. 2 25 5 312 22 2 5 5 5a , b 12 , c 15 x y 12y 15 (y ) (x )= = − = ⇒ = − + ⇒ − = − .
Como se puede observar en la figura 39, se elige la parábola 1 ya que la circunferencia
osculatriz se encuentra en la parte cóncava de la curva.
Figura 39. Representación gráfica de las curvas del ejercicio 11
23. Sea la curva
r3
2t(t) t, t
3
= −
.
Obtenga la ecuación de la circunferencia osculatriz en (0,0). Solución.
T T
N N
22
2 2 2
2
2
1 (t 1,2t) 2(0) 2 radio . (t) '(t) (2t,1 t )
2 t 1 (t 1)
(2t,1 t )(t) (0) (0,1)
(t 1)
−κ = ⇒ = = ⇒ = −+ +
−⇒ = ⇒ =
+
Centro: 1 12 2(0,0) (0,1) (0, )+ = . Circunferencia: 2 21 1
2 4x (y ) .+ − =
24. Una partícula se mueve a lo largo de una curva de ecuación dada por
r 3 2(t) (t 3t, t t,3t)= − + . Calcule la componente normal y tangencial de la aceleración en un
punto donde el plano normal es paralelo al plano 3x 4z 24− + = .
Solución.
r' r''2(t) (3t 3,2t 1,3) , (t) (6t,2,0)= − + =
De modo que r'
Tr' 2 2 2
(t) (3(t 1)(t 1),2t 1,3)(t)
(t) 9(t 1) (t 1) (2t 1) 9
+ − += =+ − + + +
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 87 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Para obtener paralelismo con el plano 3x 4z 24− + = se tiene i j k
T
2
2 2 2
2
1(t) ( 3,0,4) 3(t 1) 2t 1 3
9(t 1) (t 1) (2t 1) 9 3 0 4
1(8t 4, 12t 3,6t 3) (0,0,0) t
2
× − = − ++ − + + + −
= + − + + = ⇒ = −
Calculando en el punto de interés r' r''
r'
91 1 272 2 4 41
T 2 1 81 812 16 16
( ) ( ) ( ,0,3) ( 3,2,0) 27 9c ( )
15 5( ) 0 9 9
− • − − • −− = = = = =
− + + +
94
91 122 21
N 2 1 81 812 16 16
0 3
( 6, 9,( ) ( ) 3 2 0 2 61c ( )
5( ) 0 9 9
−− − −− × − −
− = = = =− + + +
i j k
r' r''
r'
25. Sea la curva de ecuación vectorial r(t) (t cos(t), tsen(t), t).=
a. Calcule el cociente curvatura entre torsión en t 0.=
Solución. r r'(t) (cos(t) tsen(t), sen(t) t cos(t),1) '(0) (1,0,1)= − + ⇒ =
r r''(t) ( 2sen(t) t cos(t),2cos(t) tsen(t),0) ''(0) (0,2,0)= − − − ⇒ =
r r'''(t) ( 3cos(t) tsen(t), 3sen(t) t cos(t),0) '''(0) ( 3,0,0)= − + − − ⇒ = −
i j kr r r r'(0) ''(0) 1 0 1 ( 2,0,2) '(0) ''(0) 2 2
0 2 0× = = − ⇒ × =
r r r( '(0) ''(0)) '''(0) ( 2,0,2) ( 3,0,0) 6× • = − • − =
r r
r
r r r
r r
r r
r r r r
'(0) ''(0)33'(0)
( '(0) ''(0)) '''(0) 32'(0) ''(0)
'(0) ''(0)(0) 16 2 16 4(0) 12 32 2.6'(0) .(( '(0) ''(0)) '''(0))
×
× •
×
×κ = = = = =τ × •
b. Halle la ecuación del plano osculador en el punto (0,0,0).
Solución. r r
Br r'(0) ''(0) ( 2,0,2) 1 1
(0) ,0,'(0) ''(0) 2 2 2 2
× −= = = − × .
Luego, la ecuación es: 1 1
,0, (x,y,z) 0 x z 02 2
− • = ⇒ − + =
.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 88 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
26. Una curva plana C, que viene parametrizada por r(t) (x(t), y(t),z(t))= es tal que
r r r 30 0 0 2
(t ) (0, 1,3) , '(t ) ( 2,1,0) , ''(t ) (0, , 3)= − = − = − .
Encuentre en 0t :
a. La curvatura de C.
Solución. i j k
r r r r0 0 0 0'(t ) ''(t ) 2 1 0 ( 3, 6, 3) , '(t ) ''(t ) 9 36 9 3 6.0 3 /2 3
× = − = − − − × = + + =−
r 0'(t ) 4 1 5.= + =
Se tiene entonces que: r r
r
0 00 3
0
'(t ) ''(t ) 3 6(t ) .
5 5'(t )
×κ = =
b. La ecuación del plano rectificante.
Solución. r
B T r
00 0
0
'(t )(1,2,1) ( 2,1,0)(t ) , (t ) ,
'(t )6 5
−= = =
i j kN 0
1 1(t ) 1 2 1 ( 1, 2,5)
30 302 1 0= = − −
−.
Ecuación del plano rectificante: ( 1, 2,5) (x,y 1,z 3) 0 x 2y 5z 17 0.− − • + − = ⇒ + − + =
c. El vector N ' .
Solución.
N B T
0 0 0 0 0 0 03 6 ( 2,1,0)
'(t ) (t ).s '(t ). (t ) (t ).s '(t ). (t ) (0,0,0) . 5.5 5 5
3 6( 2,1,0).
5 5
−= τ − κ = −
= − −
27. Sea r 3 2 3(t) (3t t ,3t ,3t t )= − + . Determine:
a. que (t) (t)κ = τ en cualquier punto.
Solución.
r r r2 20 0'(t) (3 3t ,6t,3 3t ) , ''(t ) ( 6t,6,6t) , '''(t ) ( 6,0,6).= − + = − = −
i j k
r r
r r r
2 2 2 2 2 2
2 2
'(t) ''(t) 3 3t 6t 3 3t (18t 18, 36t,18t 18) 18(t 1, 2t, t 1)6t 6 6t
'(t) ''(t) 18 2(t 1) , '(t) 18(t 1).
× = − + = − − + = − − +−
× = + = +

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 89 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Se tiene entonces que: r r
r
2
3 2 22 3
'(t) ''(t) 18 2(t 1) 1(t) .
3(t 1)18 18(t 1)'(t)
× +κ = = =++
r r r
r r
2 2
2 2 2 2 2 2 2 2
( '(t) ''(t)) '''(t) 18(t 1, 2t, t 1) ( 6,0,6) 12 1(t) .
18 .2.(t 1) 36(t 1) 3(t 1)'(t) ''(t)
× • − − + • −τ = = = =+ + +×
b. un valor 0t donde r 2(t) alcance un máximo o mínimo local.
Solución.
r 2 3 2 4 3 2 2 4 6 4 2 4 6 6 4 2(t) (3t t ) 9t (3t t ) 9t 6t t 9t 9t 6t t 2t 9t 18t= − + + + = − + + + + + = + +
r2 5 3(t) ' 0 12t 36t 36t 0 t 0 = ⇒ + + = ⇒ =
r r 2 24 2(t) '' 60t 108t 36 (0) '' 36 0 mínimo local = + + ⇒ = >
c. cómo son geométricamente los vectores r 0'(t ) y r 0''(t ).
Solución. r r'(0) ''(0) (3,0,3) (0,6,0) 0• = • = , por lo tanto son ortogonales.
28. Una partícula móvil con vector de posición r(t) se mueve en el espacio. Pruebe que si r r(t) '(t)× es un vector constante, la partícula se mueve en un plano.
Solución. r r r r r r 0 r r r r
r r r r 0 r r r r1
1 2
(t) '(t) (a,b,c) ( (t) '(t))' (t) ''(t) (t) ''(t) ''(t) k (t).
''(t) '(t) k (a,b,c) '''(t) '(t) '(t) '''(t) '''(t) k '(t).
× = ⇒ × = × = ⇒ ⇒ =
× = ⇒ × = ⇒ ⇒ =
r r rr r rr r r
r r1 2
23
k ( '(t) (t)) k '(t)( '(t) ''(t)) '''(t)(t) K(( '(t) (t)) '(t)) 0
k'(t) ''(t)
× •× •τ = = = × • =×
.
29. Encuentre los puntos de máxima y mínima torsión de la curva dada por r(t) (t sen(t),1 cos(t), t)= − − , t [0,2 ].∈ π
Solución. r r r'(t) (1 cos(t), sen(t),1) , ''(t) (sen(t),cos(t),0) , '''(t) (cos(t), sen(t),0)= − = = − .
i j kr r'(t) ''(t) 1 cos(t) sen(t) 1 ( cos(t),sen(t), 1 cos(t))
sen(t) cos(t) 0× = − = − − + .
r r2 2 2 2 2'(t) ''(t) cos (t) sen (t) cos (t) 2 cos(t) 1 cos (t) 2 cos(t) 2× = + + − + = − + .
2 2
( cos(t),sen(t), 1 cos(t)) (cos(t), sen(t),0) 1(t) .
cos (t) 2 cos(t) 2 cos (t) 2cos(t) 2
− − + • −τ = = −− + − +
2 2
2cos(t)sen(t) 2sen(t)'(t) 0 sen(t)(1 cos(t)) 0 t 0, ,2 .
(cos (t) 2cos(t) 2)
− +τ = = ⇒ − = ⇒ = π π− +

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 90 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Mínima torsión: t 0, t 2 (0) (2 ) 1 /2.= = π τ = τ π = −
Puntos: r(0) (0,0,0)= , r(2 ) (2 ,0,2 )π = π π
Máxima torsión: t ( ) 1 /5.= π τ π = − Puntos: r( ) ( ,2, )π = π π .
30. El movimiento de una partícula en un instante cualquiera tiene como vector aceleración
a 2(t) (sen(t), t ,2)= . Para t 0= se sabe que v(0) (2,3,1)= y r(0) (0,0,0)= .
a. Encuentre la ecuación de la curva r(t) que describe la posición de la partícula.
Solución.
v 31 3 5(t) ( cos(t) c , t /3 c ,2t c )= − + + + ,
r 4 21 2 3 4 5 6(t) ( sen(t) c t c , t /12 c t c , t c t c )= − + + + + + + .
v 1 3 5 1 3 5(0) ( 1 c ,c , c ) (2,3,1) c 3,c 3,c 1= − + = ⇒ = = = .
r 2 4 6 2 4 6(0) (c ,c , c ) (0,0,0) c 0,c 0,c 0= = ⇒ = = = .
Por tanto r 4 2(t) ( sen(t) 3t, t /12 3t, t t)= − + + + .
b. Calcule para t 0= , la torsión y el plano osculador.
Solución. r r r (0) (0,0,0) , '(0) (2,3,1) , ''(0) (0,0,2) ,= = =
r r'''(t) (cos(t),2t,0) '''(0) (1,0,0)= ⇒ = .
r r r
r r2
( '(0) ''(0)) '''(0) (6, 4,0) (1,0,0) 6 3(0)
52 52 26'(0) ''(0)
× • − •τ = = = =×
.
r rB
r r'(0) ''(0) (6, 4,0) (3, 2,0)
(0) .'(0) ''(0) 52 13
× − −= = =×
Plano osculador: (3, 2,0)
(x 0,y 0,z 0) 0 3x 2y 013
− • − − − = ⇒ − = .
c. Encuentre las componentes tangencial y normal del vector aceleración en t 0= .
Solución. r r
rT'(0) ''(0) (2,3,1) (0,0,2) 2
c (0)'(0) 14 14
• •= = = . r r
rN
'(0) ''(0) 52 26c (0)
'(0) 14 7
×= = = .
31. Determine y grafique la función ( ) 0φ α > tal que la curva
rt t t
0 0 0
(t) ( )sen( )d , ( )cos( )d , ( ) tan( )d = φ α α α φ α α α φ α α α ∫ ∫ ∫ ,
20 t π< <
tenga curvatura 2(t) 1 cos (t)κ = + .
Solución. Paso 1. Cálculo de r' r' r''(t), (t) y (t) .
r'(t) ( (t)sen(t), (t)cos(t), (t) tan(t)) (t)(sen(t),cos(t), tan(t))= φ φ φ = φ .

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 91 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
r' 2 2 2 2(t) (t) sen (t) cos (t) tan (t) (t) 1 tan (t) (t)sec(t)= φ + + = φ + = φ .
r'' 2(t) (t)(cos(t), sen(t),sec (t)) '(t)(sen(t),cos(t), tan(t))= φ − + φ .
Paso 2. Cálculo de r' r'' r' r'' r'3
(t) (t), (t) (t) y (t)× × .
r' r''
2
2 2
(t) (t) (t)(sen(t),cos(t), tan(t)) (t)(cos(t), sen(t), sec (t)) '(t)(sen(t), cos(t), tan(t))
( (t)) (sen(t), cos(t), tan(t)) (cos(t), sen(t), sec (t)) (t) '(t) (sen(t), cos(t), t
× = φ × φ − + φ
= φ × − × φ φ
i j k i j k i j k 2 2
2 2
an(t)) (sen(t), cos(t), tan(t))
( (t)) sen(t) cos(t) tan(t) (t) '(t) sen(t) cos(t) tan(t) ( (t)) sen(t) cos(t) tan(t) (t)sen(t) cos(t) tan(t)cos(t) sen(t) sec (t) cos(t) sen(t) sec (t)
×
= φ + φ φ = φ + φ
− −
0
i j k
22 2 2 2
22
2 32
2
'(t)
1 sen (t) sen(t)( (t)) sen(t) cos(t) tan(t) ( (t)) , sen(t) , sen (t) cos (t)
cos(t) cos(t) cos (t)cos(t) sen(t) sec (t)
1 sen (t) sen (t)( (t)) , ,
cos(t) cos (t)
φ
= φ = φ + − − −
−
+= φ − 1
−
r' r''2 2 6
22 4
(1 sen (t)) sen (t)(t) (t) ( (t)) 1
cos (t) cos (t)
+× = φ + + , r'3 3 3(t) ( (t)) sec (t)= φ .
Paso 3. Cálculo de (t)κ .
2 2 6 2 2 6(1 sen (t)) sen (t) (1 sen (t)) sen (t)2 22 4 2 4cos (t) cos (t) cos (t) cos (t)
3 3 3
2 2 2 6 4
2
( (t)) 1 cos (t) 1(t) (t)(t)
(t)sec(t)( (t)) sec (t)(t)
cos (t)(1 sen (t)) sen (t) cos (t)(t)sec(t)
cos (t)(
+ +φ + + + +×κ = = =
φφ
+ + +=
φ
=
r' r''
r'
2 2 2 3 4
2 2 4 2 4 6 4
2 4 6 2 4 6 4
2 cos (t)) (1 cos (t)) cos (t)(t)sec(t)
cos (t)(4 4cos (t) cos (t)) 1 3cos (t) 3cos (t) cos (t) cos (t)(t)sec(t)
4cos (t) 4 cos (t) cos (t) 1 3cos (t) 3cos (t) cos (t) cos (t)(t)sec(t)
− + − +φ
− + + − + − +=
φ
− + + − + − +=
φ
21 cos (t)
(t) sec(t)+
=φ
Paso 4. Búsqueda y gráfico de (t)φ .
Igualando de acuerdo a lo especificado: 2
2 21 cos (t)(t) 1 cos (t) 1 cos (t) (t) cos(t)
(t)sec(t)+
κ = + ⇒ = + ⇒ φ =φ
.
Se muestra la gráfica de 2
(t) cos(t), 0 t πφ = ≤ < (ver figura 40)
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 92 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 40. Gráfica de 2
(t) cos(t), 0 t πφ = ≤ <
32. Halle una parábola 2y ax bx c= + + que tenga con la función y sen(x)= en el punto
2A( ,1)π la misma recta tangente y la misma curvatura.
Solución.
Paso 1. Construcción de función posición de las curvas y sus derivadas.
Parábola: r r' r''2(t) (t,at bt c) (t) (1,2at b) (t) (0,2a)= + + ⇒ = + ⇒ =
Trigonométrica: r r' r''(t) (t,sen(t)) (t) (1,cos(t)) (t) (0, sen(t))= ⇒ = ⇒ = −
Paso 2. Cálculo de la curvatura de las curvas.
Parábola:
23/2 3/2 3/22 2 2
f ''(t) 2a 2a(t) ( )
1 (f '(t)) 1 (2at b) 1 (a b)
πκ = = ⇒ κ = + + + + π +
Trigonométrica:
23/2 3/22 2
f ''(t) sen(t)(t) ( ) 1
1 (f '(t)) 1 (cos(t))
π−κ = = ⇒ κ =
+ +
Paso 3. Relaciones encontradas entre los parámetros a determinar.
r2
2 2 4 2( ) ( ,1) a b c 1π π π π= ⇒ + + = , r'
2 2( ) (1,cos( )) (1,0) a b 0π π= = ⇒ π + =
Igualando curvaturas en 2
t 2a 1π= ⇒ = .
Paso 4. Determinación de valores de los parámetros. 12
2a 1 a= ⇒ = ± . Sustituyendo el valor de a en la relación a b 0π + = se tiene que 2
b π= ∓ .
Finalmente se determina el valor de c sustituyendo a y b en la relación 2
4 2a b c 1π π+ + = de
donde se tiene que: 2 2 2 2
4 2 8 4 8c 1 a b 1 1π π π π π= − − = ± = ±∓ .
Se concluye que existen dos parábolas como solución al problema
2 2
2 21 1y 1 x x ; y 1 x x
2 2 8 2 2 8π π π π= + − + = − + − .

SISTEMA DE COORDENADAS POLARES
Funciones Vectoriales de Variable Real Pág.: 93 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.34. SISTEMA DE COORDENADAS POLARES
El sistema de coordenadas rectangulares que se ha estado usando hasta ahora, no es
más que un algoritmo que permite establecer una correspondencia entre los puntos del plano
y los pares de números reales. Sin embargo, esta no es la única manera en que se puede
establecer una correspondencia de este tipo. En la vida real, por ejemplo, cuando se pide
cómo llegar a un determinado lugar, a veces se da su ubicación en coordenadas rectangulares
(“camine 3 cuadras hacia el norte y después 2 hacia el este”) pero a veces se usa otro
sistema, sobre todo si el lugar se encuentra en una región no urbanizada (“camine en tal
dirección un kilometro y medio”). Precisamente, este sistema en el cual un punto se ubica
mediante una dirección y una distancia, es sumamente útil en muchas aplicaciones y recibe el
nombre de “sistema polar”.
Cada punto P de 2R con coordenadas rectangulares (x,y) se puede asociar con el par (r, )θ de la siguiente forma: Se traza una recta (eje polar) que pase por P y por el origen de
coordenadas (llamado ahora polo), la cual formará un ángulo θ , medido en radianes, con la
dirección positiva del eje X. Esta recta puede verse como la rotación de un ángulo θ del eje X.
El eje X corresponde a 0θ = . Se asigna a P las coordenadas polares r (coordenada radial) que
es la distancia dirigida de P al polo y θ (coordenada angular) (ver figura 41). De esta forma,
dado un punto P, la relación entre sus coordenadas cartesianas (x,y) y sus coordenadas
polares, viene dada por:
2 2x r cos( ) r x yy rsen( ) arctg(y / x) , x 0
= θ = ± +⇒ = θ θ = ≠.
Figura 41. Relaciones cartesianas - polares

SISTEMA DE COORDENADAS POLARES
Funciones Vectoriales de Variable Real Pág.: 94 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 28. Encuentre las coordenadas cartesianas del punto (3, )π .
Solución. x 3cos( ) 3 ; y 3sen( ) 0= π = − = π = .
Ejemplo 29. Encuentre las coordenadas polares del punto (1,1).
Solución.
2 2r 1 1 2 ; arctg(1 /1) 4= ± + = ± θ = = π . Si 4θ = π , r 2= .
Entonces se puede apreciar que las coordenadas polares del punto son 4( 2, )π .
Observación 15. La representación polar de un punto en cartesianas no es única. Si un punto tiene coordenadas polares (r, )θ , también son coordenadas del mismo punto (r, 2k )θ + π o
( r, (2k 1) )− θ + + π , (k Z)∈ . Por ejemplo, para k 0= se tiene que las coordenadas (r, )θ y
( r, )− θ + π representan el mismo punto P.
Ejemplo 30. Las coordenadas polares del punto (1,1), además de 4( 2, )π también pueden
ser: 54( 2, )π− , 3
4( 2, )π− − .
1.35. REPRESENTACIONES DE UNA CURVA EN POLARES
Como se sabe, un punto tiene infinitas representaciones: Si las coordenadas de P son (r, )θ , también lo son (r, 2k )θ + π o ( r, (2k 1) )− θ + + π con k Z∈ , estas dos expresiones se
pueden resumir en una sola k( 1) r f( k ).− = θ + π
Ejemplo 31. Encuentre las representaciones de la curva dada por r 2cos(2 )= θ .
Solución. k( 1) r 2 cos2( k ) 2 cos(2 2k ) 2cos(2 )cos(2k ) 2sen(2 )sen(2k ))− = θ + π = θ + π = θ π − θ π
de donde r 2cos(2 ) si k es par, r 2cos(2 ) si k es impar= θ = − θ .
Las dos ecuaciones representan la misma curva.

ECUACIÓN POLAR DE UNA RECTA
Funciones Vectoriales de Variable Real Pág.: 95 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.36. ECUACIÓN POLAR DE UNA RECTA
Sean R una recta cualquiera, *I (r , )= ω las coordenadas polares del punto intersección
entre R y su perpendicular que pasa por el polo y P(r, )θ cualquier punto sobre la recta R,
entonces *r
cos( )r
θ − ω = ,
de donde se obtiene la ecuación de R en coordenadas polares: *r
rcos( )
=θ − ω
.
Ejemplo 32. Calcule la ecuación polar de la recta de ecuación cartesiana y x 1.= +
Solución. La ecuación de la recta perpendicular que pasa por el origen es y x= − , siendo el punto de
intersección: x y 1
( 1 /2,1 /2)x y 0− + =
⇒ − + =.
Sus coordenadas polares son: * 2 2r ( 1 /2) (1 /2) 2 2.= − + =
Sea arctg( 1) 3 4ω = − = π , luego las coordenadas de este punto son ( 2 2,3 4)π .
La ecuación polar de la recta es por lo tanto 2 2
r3
cos4
=π θ −
.
Casos particulares: (ver figura 42) a. Recta que pasa por el origen: y mx= :rsen( ) mr cos( ) tg( ) m arctg(m)θ = θ ⇒ θ = ⇒ θ =
b. Recta paralela al eje y: x c= : * cr c; 0; r
cos( )= ω = =
θ.
c. Recta es paralela al eje x: y b= : * b br b; ; r
2 cos( 2) sen( )π= ω = = =
θ − π θ.
d. Rectas paralelas: Si la recta R tiene ecuación *r r cos( )= θ − ω entonces la ecuación de
una recta paralela R es *r d r cos( )+ = θ − ω donde d es la distancia entre las dos rectas.
Observe que d puede ser positivo o negativo de acuerdo con la posición de la recta
respecto de R.

ECUACIÓN POLAR DE UNA RECTA
Funciones Vectoriales de Variable Real Pág.: 96 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 42. Algunos casos particulares de ecuaciones de rectas en polares
Ejemplo 33. Determine la ecuación de la recta que pasa por el punto (5,0) y forma con el eje polar un ángulo 5 / 6.α = π
Solución. Ecuación cartesiana: 3y 3x 5 3 0+ − = . Recta perpendicular: 3y 3x.=
Punto de intersección: 5 5
, 34 4
. En coordenadas polares: 5
, .2 3
π
Ecuación polar de la recta: 52
3
r .cos( )π=
θ −
1.37. ECUACIÓN POLAR DE UNA CIRCUNFERENCIA
Sean (r ', ')θ las coordenadas polares del centro de la circunferencia y a su radio. Sea
P(r, )θ cualquier otro punto de la circunferencia, entonces por el teorema del coseno se tiene la
ecuación general de una circunferencia dada por la expresión 2 2 2a (r ') r 2rr ' cos( ')= + − θ − θ .
Casos particulares:
a. Centro en el polo, es decir, (r ', ') (0, )θ = θ , por lo tanto 2 2r a= de donde: r a= o bien
r a= − . b. Centro sobre el eje x y pasa por el polo, es decir, (r ', ') (a,0)θ = , por lo tanto su
ecuación es r 2acos( )= θ .

ECUACIÓN POLAR DE UNA CIRCUNFERENCIA
Funciones Vectoriales de Variable Real Pág.: 97 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
c. Centro sobre el eje y y pasa por el polo, es decir, 2(r ', ') (a, )πθ = , por lo tanto su
ecuación es r 2asen( )= θ .
Ejemplo 34. Una circunferencia que pasa por el polo y por el punto 6( 1, )π− , tiene su centro en
la recta 43πθ = . Determine su ecuación polar.
Solución.
Ecuación de la circunferencia: 43r 2acos( )π= θ − .
Como pasa por el punto 6
( 1, )π− entonces se tiene que
34 8 7 76 3 6 6 6 31 2acos( ) 2acos( ) 2acos( ) 2acos( ) 3a aπ π π− π π π− = − = = − = = − ⇒ = .
Por lo tanto 2 3 43 3r cos( )π= θ − .
1.38. DISTANCIAS EN COORDENADAS POLARES
Distancia entre dos puntos. Sean 1 1 1P (r , )θ y 2 2 2P (r , )θ dos puntos del plano, dados en
coordenadas polares. Por el teorema del coseno se tiene que la distancia de 1P a 2P viene
dada por 2 2
1 2 1 2 1 2 1 2d(P ,P ) r r 2r r cos( )= + − θ − θ .
Distancia entre un punto y una recta. Sean R la recta de ecuación polar *r r cos( )= θ − ω y
P con coordenadas 1 1(r , ).θ Sea d la distancia entre las rectas R y R’, donde ésta es paralela a
R y pasa por 1 1(r , ),θ su ecuación es por lo tanto *r d r cos( )+ = θ − ω . El punto 1 1(r , )θ satisface
la ecuación de R’. Por lo tanto *1 1d(P,R) d r cos( ) r= = θ − ω − .
Ejemplo 35. Calcule la distancia de la recta
4
2r
cos( )π=
θ −
al punto (2,3 / 4)π .
Solución. 3
d(P,R) 2cos 2 2cos 2 2.4 4 2π π π = − − = − =

ECUACIÓN POLAR DE UNA CÓNICA
Funciones Vectoriales de Variable Real Pág.: 98 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.39. ECUACIÓN POLAR DE UNA CÓNICA
Definición 38. Una cónica es el conjunto de los puntos P del plano tales que el cociente de la
distancia de P a un punto fijo F (foco) entre la distancia de P a una recta fija D (directriz) es
una constante e (excentricidad): PF
ePD
=
a. Si e 1< la cónica es una elipse
b. Si e 1= la cónica es una parábola
c. Si e 1> la cónica es una hipérbola
Suponga que la directriz D tiene ecuación *r cos( ) rθ − ω = , las coordenadas del foco
son ( , )ρ α , y sea P (r, )= θ un punto arbitrario de la cónica, luego su ecuación será:
2 2 *r 2r cos( ) e r cos( ) r .+ ρ − ρ θ − α = θ − ω −
En algunos casos la ecuación anterior toma una forma muy simple, por ejemplo, si el foco coincide con el polo, es decir, F (0,0)= la ecuación anterior se reduce a:
*r e r cos( ) r .= θ − ω −
Además si la directriz es paralela al eje:
a. / 2θ = π (eje y) y está a la derecha del foco se tendrá 0ω = y *r cos( ) r 0,θ − < luego *er
r1 e cos( )
=+ θ
con *r 0> .
b. / 2θ = π y está a la izquierda del foco se tendrá 0ω = y *r cos( ) r 0θ − > , luego *er
r1 e cos( )
= −− θ
con *r 0< .
c. 0θ = (eje x) y está por encima del foco se tendrá /2ω = π y *r cos( ) r 0,θ − < luego *er
r1 esen( )
=+ θ
con *r 0> .
d. 0θ = y está por debajo del foco se tendrá /2ω = π y *rsen( ) r 0,θ − > luego *er
r1 esen( )
= −− θ
con *r 0< .

ECUACIÓN POLAR DE UNA CÓNICA
Funciones Vectoriales de Variable Real Pág.: 99 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 36. Determine la ecuación de la cónica con foco en el polo, directriz x 2= y excentricidad e 2.=
Solución. La directriz es x 2= , luego *r 2= , está a la derecha del foco y es paralela al eje / 2θ = π por
lo tanto su ecuación general es *er
r1 e cos( )
=+ θ
.
Sustituyendo se tiene 4
r1 2cos( )
=+ θ
.
Ejemplo 37. La ecuación de una cónica es 4
r3 2sen( )
=+ θ
.
Identifique la cónica, dé la ecuación de la directriz correspondiente al foco en el polo y obtenga
los vértices.
Solución. 43
23
4r
3 2sen( ) 1 sen( )= =
+ θ + θ.
Por tanto e 2 /3 1= < , la cónica es una elipse. Se tiene además que
* * *2 4er r r 2
3 3= = ⇒ = ;
por lo tanto la ecuación de la directriz es rsen( ) 2.θ =
Vértices: 1 2r( /2) 4 /5 v (4 /5, /2) ; r(3 /2) 4 v (4,3 /2)π = ⇒ = π π = ⇒ = π .
1.40. GRÁFICAS EN COORDENADAS POLARES
Dada una curva definida por la ecuación F(r, ) 0θ = , se define el gráfico de ella como el
conjunto de puntos P(r, )θ que satisfacen la ecuación.
Tipos de caracoles (o limacon). Sea la ecuación r a b cos( ),= + θ donde a 0> y b 0> .
a. 0 a /b 1< < : Caracol con lazo (ver figura 43)

GRÁFICAS EN COORDENADAS POLARES
Funciones Vectoriales de Variable Real Pág.: 100 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 43. Gráfica de r=1+2cos(θ)
b. a /b 1= : Cardioide (forma de corazón) (ver figura 44)
Figura 44. Gráfica de r=1+cos(θ)
c. 1 a /b 2< < : Caracol con hendidura (ver figura 45)
Figura 45. Gráfica de 32
r= +cos(θ)
d. 2 a /b≤ : Caracol convexo (sin hendidura) (ver figura 46)

GRÁFICAS EN COORDENADAS POLARES
Funciones Vectoriales de Variable Real Pág.: 101 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 46. Gráfica de r=3+cos(θ) Tipos de rosas. La gráfica de una ecuación de la forma r acos(n )= θ es una rosa que tiene n
hojas si n es impar y 2n hojas si n es par. Cada hoja tiene una longitud a. (ver figuras 47 y
48)
Figura 47. Gráfica de r=2cos(2θ)
Figura 48. Gráfica de r=2cos(3θ)
1.41. INTERSECCIÓN DE CURVAS EN POLARES
Dada una curva definida por la ecuación F(r, ) 0θ = , se define el gráfico de ella como el
conjunto de puntos P(r, )θ que satisfacen la ecuación.
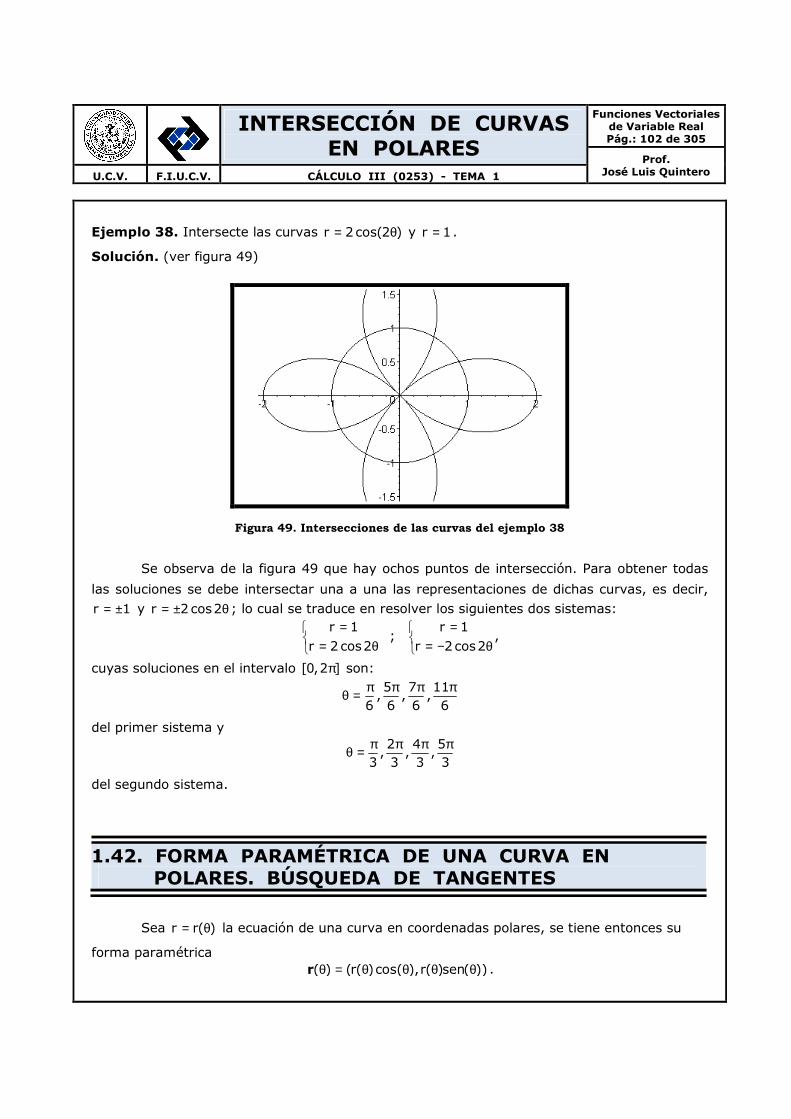
INTERSECCIÓN DE CURVAS EN POLARES
Funciones Vectoriales de Variable Real Pág.: 102 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Ejemplo 38. Intersecte las curvas r 2cos(2 )= θ y r 1= .
Solución. (ver figura 49)
Figura 49. Intersecciones de las curvas del ejemplo 38
Se observa de la figura 49 que hay ochos puntos de intersección. Para obtener todas
las soluciones se debe intersectar una a una las representaciones de dichas curvas, es decir,
r 1= ± y r 2 cos2= ± θ ; lo cual se traduce en resolver los siguientes dos sistemas:
r 1 r 1
;r 2 cos2 r 2cos2
= = = θ = − θ
,
cuyas soluciones en el intervalo [0,2 ]π son: 5 7 11
, , ,6 6 6 6π π π πθ =
del primer sistema y 2 4 5
, , ,3 3 3 3π π π πθ =
del segundo sistema.
1.42. FORMA PARAMÉTRICA DE UNA CURVA EN POLARES. BÚSQUEDA DE TANGENTES
Sea r r( )= θ la ecuación de una curva en coordenadas polares, se tiene entonces su
forma paramétrica ( ) (r( )cos( ),r( )sen( ))θ = θ θ θ θr .

BÚSQUEDA DE TANGENTES Funciones Vectoriales
de Variable Real Pág.: 103 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Tangentes horizontales: r '( )sen( ) r( )cos( ) 0 y r '( )cos( ) r( )sen( ) 0θ θ + θ θ = θ θ − θ θ ≠ .
Tangentes verticales: r '( )sen( ) r( )cos( ) 0 y r '( )cos( ) r( )sen( ) 0θ θ + θ θ ≠ θ θ − θ θ = .
Ejemplo 39. Encuentre las tangentes horizontales y verticales a r 1 2 cos( )= + θ .
Solución. (ver figura 50)
Figura 50. Gráfica del ejemplo 39
Tangentes horizontales: 2 2 2
2
2sen ( ) (1 2cos( ))cos( ) 0 2(1 cos ( )) cos( ) 2 cos ( ) 0
2 4cos ( ) cos( ) 0
53.62 ,147.46 ,21
− θ + + θ θ = ⇒ − − θ + θ + θ =
⇒ − + θ + θ =
⇒ θ = � �
2.53 ,306.38� �
y 4sen( )cos( ) sen( ) 0θ θ + θ ≠
Puntos (2.19,53.62 ) , ( 0.69,147.46 ) , ( 0.69,212.53 ) , (2.19,306.38 )− −� � � �
Tangentes verticales: 2sen( )cos( ) (1 2cos( ))sen( ) 0 2sen( )cos( ) sen( ) 2sen( )cos( ) 0
4sen( )cos( ) sen( ) 0 sen( )(4cos( ) 1) 0− θ θ − + θ θ = ⇒ − θ θ − θ − θ θ =
⇒ θ θ + θ = ⇒ θ θ + =
0 ,180 ,104.47 ,255.52⇒ θ = � � � �
y 24cos ( ) cos( ) 2 0θ + θ − ≠
Puntos (3,0) , ( 1,180 ) , (0.5,104.47 ) , (0.5,255.52 )− � � � .
TEOREMA 15. Si m es la pendiente de la recta tangente a la gráfica de r( )θ en el punto
(r( ), ),θ θ entonces
r '( )sen( ) r( )cos( )m
r '( )cos( ) r( )sen( )θ θ + θ θ=θ θ − θ θ
.

BÚSQUEDA DE TANGENTES Funciones Vectoriales
de Variable Real Pág.: 104 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Demostración.
Se sabe que dy dy / d r '( )sen( ) r( )cos( )
mdx dx / d r '( )cos( ) r( )sen( )
θ θ θ + θ θ= = =θ θ θ − θ θ
considerando la forma paramétrica en coordenadas polares vista en el apartado anterior.
1.43. LONGITUD DE ARCO Y ÁREA EN POLARES
Sea
( ) (r( )cos( ),r( )sen( ))θ = θ θ θ θr
la forma paramétrica de una curva dada en coordenadas polares. Se tiene: '( ) (r '( )cos( ) r( )sen( ),r '( )sen( ) r( )cos( ))θ = θ θ − θ θ θ θ + θ θr .
De modo que
2 2L (r '( )cos( ) r( )sen( )) (r '( )sen( ) r( )cos( )) dβ
α
= θ θ − θ θ + θ θ + θ θ θ∫
.
Ejemplo 40. Calcule la longitud de arco de de la cardioide r 2(1 cos( )).= + θ
Solución.
2 2
0
L 2 ( 2sen( )) 4(1 cos( )) d 16.π
= − θ + + θ θ =∫
TEOREMA 16. Sea R la región limitada por las rectas θ = α y θ = β y la curva cuya ecuación
es r( )θ , donde r es continua y no negativa en el intervalo cerrado [ , ]α β . Entonces, si A
unidades cuadradas es el área de la región R,
21A [r( )] d
2
β
α
= θ θ∫
.
Ejemplo 41. Calcule el área de la región limitada por la cardioide r 2(1 cos( )).= + θ
Solución.
212
0
A 2 (2 2cos( )) d 6π
= + θ θ = π∫
.

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 105 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.44. RESUMEN DE FÓRMULAS
t
a
3
s(t) '( ) d
(t) (t) (t) (t) (t) (t) (t) (t) (t)
'(t) ''(t) '(t)'(t) '(t) ''(t) (t)(t) (t)'(t) ''(t) '(t)'(t) '(t) ''(t)
'(t) ''(t) y ''(t)x '(t) y '(t)x ''(t) (t)'(t)
= α α
= × = × = ×
× × × == =× × ×
× −κ = κ =
∫
r
T N B B T N N B T
r r rr r r NT Br r rr r r
r r
r 2 2 3/2 2 3/2
2
(t) f ''(t)k(t)
(x '(t) y '(t) ) (1 (f '(t)) )
( '(t) ''(t)) '''(t)'(t) ''(t)'(t) ''(t) (t)(t) (t) (t) (t)'(t) '(t) '(t) ''(t)
'(t) (t)s '(t) (t) '(t) (t)s '(t) (t) '(t) (t)s '(t) (t)
=+ +
× •×• τ == =×
= −τ = κ = τ −
T N
r r rr rr ra T a N
r r r r
B N T N N B
2 22
3/22 2
2 2
(t)s '(t) (t)
r 2(r ') rr '' 1( ) A [r( )] d
2r (r ')
L (r( )) (r '( )) d
β
α
β
α
κ
+ −κ θ = = θ θ
+
= θ + θ θ
∫
∫
T

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 106 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.45. EJERCICIOS RESUELTOS
1. Sea la curva de ecuación vectorial
r2
3 3
3t 3t(t) ,
1 t 1 t
= + +
.
Pruebe que la curva dada verifica la ecuación 3 3x y 3xy+ = y escriba su ecuación polar.
Solución. 3 2 3 3 6 3 3 3 2
3 33 3 3 3 3 3 3 3 3 2 3 3
(3t) (3t ) 27t 27t 27t (1 t ) 27t 3t 3tx y 3. . 3xy
(1 t ) (1 t ) (1 t ) (1 t ) (1 t ) 1 t 1 t
+ ++ = + = = = = =+ + + + + + +
Ecuación polar:
3 3 3 3 3 2
3 3
3 3
x y 3xy r (cos ( ) sen ( )) 3.r cos( )sen( )
r(cos ( ) sen ( )) 3cos( )sen( )3cos( )sen( )
r (r 0)cos ( ) sen ( )
+ = ⇒ θ + θ = θ θ
⇒ θ + θ = θ θθ θ
⇒ = ≠θ + θ
2. Calcule la longitud de arco de r 1 cos( ), 0 2= + θ ≤ θ ≤ π .
Solución. r ( ) ((1 cos( ))cos( ),(1 cos( ))sen( )) , 0 2θ = + θ θ + θ θ ≤ θ ≤ π .
2 2 22 2
0 0 0
(1 cos( )) ( sen( )) d 1 2cos( ) 1d 2 1 cos( )dπ π π
+ θ + − θ θ = + θ + θ = + θ θ∫ ∫ ∫
2 2 2
0 0 0
2
0
sen( ) sen( ) sen( )2 1 cos( )d 2 d 2 d 2 d
1 cos( ) 1 cos( ) 1 cos( )
2 2 1 cos( ) 2 1 cos( ) 2 2 2 2 2 8
π π π π
ππ π
π
θ θ θ+ θ θ = θ = θ − θ− θ − θ − θ
− θ − − θ = + =
∫ ∫ ∫ ∫
3. Las espirales de MacLaurin corresponden a una familia de curvas en el plano que al ser descrita en coordenadas polares las variables r y θ satisfacen la relación
1nr a.(sen(n )) , a 0 , n (0, )= θ > ∈ ∞ .
Pruebe que la curvatura de una espiral de MacLaurin de orden n es n 1nn 1
.(sen(n ))a
−+κ = θ .
Solución. Cálculo de r ' y r '' .
1 n 1 2n 1 n2n n nr ' a.(sen(n )) cos(n ) , r '' a(1 n)(sen(n )) cos (n ) an(sen(n )) sen(n )
− − −= θ θ = − θ θ − θ θ

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 107 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Cálculo de κ .
2 2
3/22 2
2 2 2n 1 2n 1 1 n 12 2 2 2 2 2n n n n n n
3/22 2 2n2 2 2n n
r 2(r ') rr ''
r (r ')
a .(sen(n )) 2a .(sen(n )) cos (n ) a (1 n)(sen(n )) cos (n ) a n(sen(n )) sen(n )
a .(sen(n )) a .(sen(n )) cos (n )
1 2.(sen(
− − −+ +
−
+ −κ =
+
θ + θ θ − − θ θ + θ θ
= θ + θ θ
+=
2 2 2 2 1
1 3/22 2n
2 2 2 2
1 3/22 2n
n )) cos (n ) (1 n)(sen(n )) cos (n ) n(sen(n )) sen(n )
a(sen(n )) 1 (sen(n )) cos (n )
1 (1 n)(sen(n )) cos (n ) n (1 n)((1 sen(n )) cos (n
a(sen(n )) 1 (sen(n )) cos (n )
− − −
−
− −
−
θ θ − − θ θ + θ θ
θ + θ θ
+ + θ θ + + + θ= =
θ + θ θ
1 3/22 2n
1 1 1 1 n1/2 1/2 12 2 2n n n n
n 1n
))
a(sen(n )) 1 (sen(n )) cos (n )
(1 n) n 1 n 1 n 1
a(sen(n )) 1 (sen(n )) cos (n ) a(sen(n )) csc (n ) a(sen(n )) a(sen(n ))
n 1.(sen(n ))
a
−
−−−
−
θ
θ + θ θ
+ + + += = = = θ + θ θ θ θ θ θ
+= θ
4. Una ecuación polar r f( )= θ es de la forma
3r
2=
+ θ.
a. Identifique, estudie y grafique la ecuación r f(cos( )).= θ
Solución. 32
12
3r
2 cos( ) 1 cos( )= =
+ θ + θ elipse (ver figura 51)
Figura 51. Gráfica del ejercicio 4a
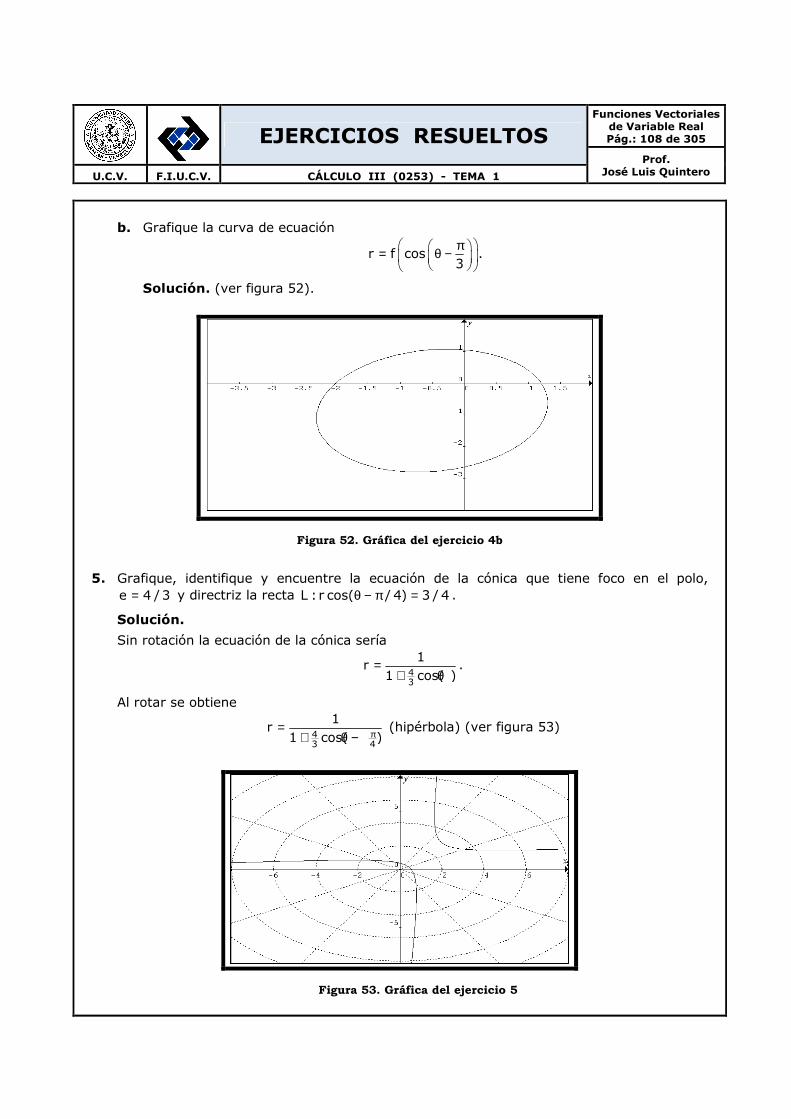
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 108 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Grafique la curva de ecuación
r f cos .3
π = θ −
Solución. (ver figura 52).
Figura 52. Gráfica del ejercicio 4b
5. Grafique, identifique y encuentre la ecuación de la cónica que tiene foco en el polo, e 4 /3= y directriz la recta L :r cos( / 4) 3 / 4θ − π = .
Solución.
Sin rotación la ecuación de la cónica sería
43
1r
1 cos( )=
+ θ.
Al rotar se obtiene
43 4
1r
1 cos( )π=
+ θ − (hipérbola) (ver figura 53)
Figura 53. Gráfica del ejercicio 5

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 109 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
6. Dadas las curvas de ecuaciones 2
r 1 3cos( ) , r2 cos( )
= + θ =− θ
en el sistema de coordenadas polares, halle sus puntos de intersección.
Solución. r 1 3cos( )= + θ : Caracol con lazo:
Representaciones: r 1 3cos( )= + θ , r 1 3cos( )= − + θ .
1 12 2
2 2 1r
2 cos( ) 2(1 cos( )) 1 cos( )= = =
− θ − θ + θ − π:
Elipse rotada ángulo π sentido antihorario.
Representaciones:
1 12 2
1 1r , r
1 cos( ) 1 cos( )= = −
+ θ − π − θ − π
Intersecciones:
Primer sistema: 2
2
21 3cos( ) (2 cos( ))(1 3cos( )) 2 2 5cos( ) 3cos ( ) 2
2 cos( )(2k 1)
3cos ( ) 5cos( ) 0 cos( )(3cos( ) 5) 0 , k Z2
3 3Si k 0 , . Si k 1 , . Puntos : 1, 1,
2 2 2 2
+ θ = ⇒ − θ + θ = ⇒ + θ − θ =− θ
+ π⇒ θ − θ = ⇒ θ θ − = ⇒ θ = ∈
π π π π = θ = = θ =
Segundo sistema: 2
2 43
21 3cos( ) (2 cos( ))( 1 3cos( )) 2 2 7cos( ) 3cos ( ) 2
2 cos( )
3cos ( ) 7 cos( ) 4 0 3(cos( ) 1)(cos( ) ) 0 2k , k Z
Si k 0 , 0. Si k 1 , 2 . Puntos : (2,0) (2,2 )
− + θ = ⇒ − θ − + θ = ⇒ − + θ − θ =− θ
⇒ θ − θ + = ⇒ θ − θ − = ⇒ θ = π ∈
= θ = = θ = π π
Tercer sistema: 2
2 43
21 3cos( ) (2 cos( ))(1 3cos( )) 2 2 7cos( ) 3cos ( ) 2
2 cos( )
3cos ( ) 7cos( ) 4 0 3(cos( ) 1)(cos( ) ) 0 (2k 1) , k Z
Si k 0 , . Si k 1 , 3 . Puntos : ( 2, ) ( 2,3 )
+ θ = − ⇒ + θ + θ = − ⇒ + θ + θ = −+ θ
⇒ θ + θ + = ⇒ θ + θ + = ⇒ θ = + π ∈
= θ = π = θ = π − π − π
Cuarto sistema: 2
2
21 3cos( ) (2 cos( ))( 1 3cos( )) 2 2 5cos( ) 3cos ( ) 2
2 cos( )(2k 1)
3cos ( ) 5cos( ) 0 cos( )(3cos( ) 5) 0 , k Z2
3Si k 0 , . Si k 1 , . Puntos : 1, 1,
2 2 2
− + θ = − ⇒ + θ − + θ = − ⇒ − + θ + θ = −+ θ
+ π⇒ θ + θ = ⇒ θ θ + = ⇒ θ = ∈
π π π = θ = = θ =
32π

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 110 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Gráfico: (ver figura 54)
Figura 54. Intersecciones de las curvas del ejercicio 6
7. Encuentre la ecuación de la recta tangente a la curva r 1 cos( )= + θ en el punto en
coordenadas polares 32 6
(1 , )π+ y calcule el área comprendida entre la recta, la curva y el
eje polar.
Solución. (ver figura 8) 3 3 3 3 131 1
6 6 6 6 4 2 2 4 2 4 23 3 3 3 3 11 1
6 6 6 6 4 2 2 4 2 4 2
sen( )sen( ) (1 cos( ))cos( ) (1 )m 1
sen( )cos( ) (1 cos( ))sen( ) (1 )
+π π π π
π π π π +
− + + − + + − + += = = = − = −
− − + − − + − − −.
3 3 3 22 6 4 2 6 4 2 4
4
rr r (1 )cos( ) (1 )cos( ) (1 )(1 3)
cos( )
∗∗ π π π π
π= ⇒ = + − = + − = + +θ −
.
3 22 4
4
(1 )(1 3)r
cos( )π
+ +=
θ −.
Figura 55. Gráfica del ejercicio 7

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 111 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
2/6 3 222 4
40
2/6 /63 222 4
40 0
/62 23 122 8
40
(1 )(1 3)1ÁREA (1 cos( )) d
2 cos( )
(1 )(1 3)1 1d (1 cos( )) d
2 2cos( )
(1 ) (1 3) 1sec ( )d 1 2cos( )
2 2
π
π
π π
π
ππ
+ + = − + θ θ θ −
+ + = θ − + θ θ θ −
+ += θ − θ − + θ +
∫
∫ ∫
∫
/6
0
/62 23/62
4 00
2 232
1 cos(2 )d
2
(1 ) (1 3) 1 sen(2 ).tg( ) 2sen( )
16 2 2 4
(1 ) (1 3) 1 3. 1 tg 1
16 12 2 6 12 8
π
πππ
+ θ θ
+ + θ θ = θ − − θ + θ + +
+ + π π π = − − + + +
∫
8. Sean las curvas 1r 1= y 2r 2 cos(3 )= θ en coordenadas polares.
a. Grafique ambas curvas en un mismo sistema de coordenadas y encuentre los puntos
de intersección.
Solución. (ver figura 56)
Figura 56. Gráfica del ejercicio 8
5 7 11 13 179 9 9 9 9 9
r 2 cos(3 )(1, ),(1, ),(1, ),(1, ),(1, ),(1, )
r 1π π π π π π= θ
⇒ =

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 112 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Plantee la(s) integral(es) que permite(n) hallar el área exterior a 1r e interior a 2r .
Solución. π π π π θ π θ − θ = + θ θ = θ + = +
π π= + = +
∫ ∫
/9 /9 /9 22 3
00 0
sen( )sen(6 )3 (4cos (3 ) 1)d 3 (1 2cos(6 ))d 3 3
3 9 3
3 33
9 6 3 2
9. Dadas las curvas
r 1 cos( )= + θ y 1
r2(1 cos( ))
=− θ
:
a. Grafíquelas en un mismo sistema de coordenadas, identifíquelas y encuentre su
ecuación cartesiana correspondiente.
Solución. r 1 cos( )= + θ : Identificación: Cardioide.
Ecuación cartesiana: 2 2 2 2 2 2 2 2 2 2r 1 cos( ) r r r cos( ) x y x y x (x x y ) x y= + θ ⇒ = + θ ⇒ + = ± + + ⇒ − + = + .
1r
2(1 cos( ))=
− θ:
12 1
2
1 1r e 1, directriz : r cos( )
2(1 cos( )) 2 2cos( ) 1 cos( )= = = ⇒ = θ = −
− θ − θ − θ
14V( ,0) y F(0,0)− .
Identificación: Parábola.
Ecuación cartesiana: 2 2 2 2
2 2 2 2 2 2 2 14
2r 2r cos( ) 1 2 x y 2x 1 2 x y 1 2x
4(x y ) (1 2x) 4x 4y 1 4x 4x y x
− θ = ⇒ ± + − = ⇒ ± + = +
⇒ + = + ⇒ + = + + ⇒ = +
Gráficas: (ver figura 57)
Figura 57. Gráficas del ejercicio 9
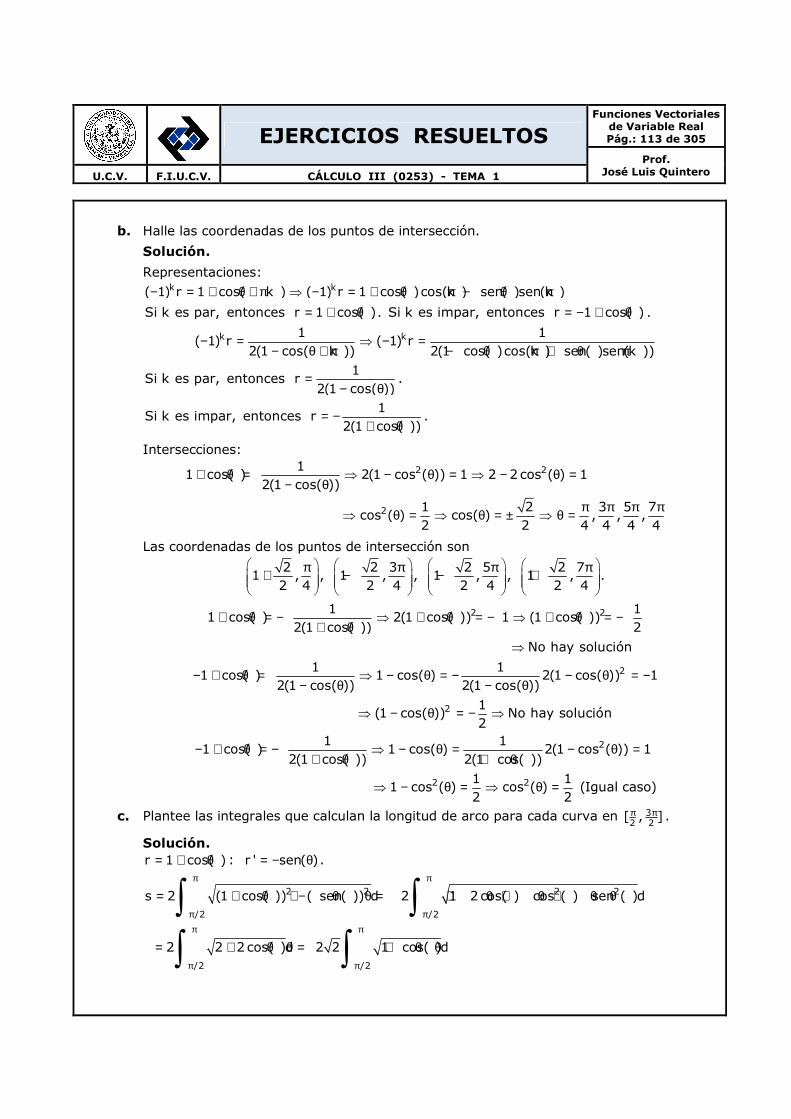
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 113 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Halle las coordenadas de los puntos de intersección.
Solución.
Representaciones: k k( 1) r 1 cos( k ) ( 1) r 1 cos( )cos(k ) sen( )sen(k )− = + θ + π ⇒ − = + θ π − θ π
Si k es par, entonces r 1 cos( )= + θ . Si k es impar, entonces r 1 cos( )= − + θ .
k k1 1( 1) r ( 1) r
2(1 cos( k )) 2(1 cos( )cos(k ) sen( )sen(k ))− = ⇒ − =
− θ + π − θ π + θ π
1Si k es par, entonces r
2(1 cos( ))=
− θ .
1Si k es impar, entonces r
2(1 cos( ))= −
+ θ .
Intersecciones: 2 2
2
11 cos( ) 2(1 cos ( )) 1 2 2cos ( ) 1
2(1 cos( ))
1 2 3 5 7cos ( ) cos( ) , , ,
2 2 4 4 4 4
+ θ = ⇒ − θ = ⇒ − θ =− θ
π π π π⇒ θ = ⇒ θ = ± ⇒ θ =
Las coordenadas de los puntos de intersección son
2 2 3 2 5 2 7
1 , , 1 , , 1 , , 1 , .2 4 2 4 2 4 2 4
π π π π+ − − +
2 21 11 cos( ) 2(1 cos( )) 1 (1 cos( ))
2(1 cos( )) 2
No hay solución
+ θ = − ⇒ + θ = − ⇒ + θ = −+ θ
⇒
2
2
1 11 cos( ) 1 cos( ) 2(1 cos( )) 1
2(1 cos( )) 2(1 cos( ))1
(1 cos( )) No hay solución2
− + θ = ⇒ − θ = − − θ = −− θ − θ
⇒ − θ = − ⇒
2
2 2
1 11 cos( ) 1 cos( ) 2(1 cos ( )) 1
2(1 cos( )) 2(1 cos( ))1 1
1 cos ( ) cos ( ) (Igual caso)2 2
− + θ = − ⇒ − θ = − θ =+ θ + θ
⇒ − θ = ⇒ θ =
c. Plantee las integrales que calculan la longitud de arco para cada curva en 32 2
[ , ]π π .
Solución. r 1 cos( )= + θ : r ' sen( )= − θ .
2 2 2 2
/2 /2
/2 /2
s 2 (1 cos( )) ( sen( )) d 2 1 2cos( ) cos ( ) sen ( )d
2 2 2cos( )d 2 2 1 cos( )d
π π
π π
π π
π π
= + θ + − θ θ = + θ + θ + θ θ
= + θ θ = + θ θ
∫ ∫
∫ ∫

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 114 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1
r2(1 cos( ))
=− θ
: 2
1 sen( )r ' . .
2 (1 cos( ))
θ=− θ
2 2 2
2 4 4/2 /2
2 2
4 4/2 /2
4/2
1 sen ( ) (1 cos( )) sen ( )s 2 d 2 d
4(1 cos( )) 4(1 cos( )) 4(1 cos( ))
1 2cos( ) cos ( ) sen ( ) 2 2cos( )2 d 2 d
4(1 cos( )) 4(1 cos( ))
1 cos( )2 d
2(1 cos( ))
π π
π π
π π
π π
π
π
θ − θ + θ= + θ = θ− θ − θ − θ
− θ + θ + θ − θ= θ = θ− θ − θ
− θ= θ− θ
∫ ∫
∫ ∫
∫
3
/2
12 d
(1 cos( ))
π
π
= θ− θ∫
10. Sean las ecuaciones en coordenadas polares
4
r 6 4cos( ) y r1 cos( )
= + θ =− θ
.
a. Identifique y grafique cada curva en un mismo sistema.
Solución.
Paso 1. Identificación de la primera curva. r 6 4 cos( )= + θ . Como a / b 1.5= , entonces se trata de un caracol con hendidura.
Paso 2. Identificación de la segunda curva. 4 4
r1 cos( ) 1 cos( )
= =− θ + θ − π
.
Se tiene que la excentricidad es igual a 1, por lo tanto se trata de una parábola y con ángulo de rotación igual a π radianes.
Paso 3. Gráfico de las curvas en un mismo sistema.
(Ver figura 58)
Figura 58. Representación gráfica de las curvas en polares del ejercicio 10

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 115 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Calcule los puntos de intersección entre estas curvas.
Solución.
Paso 1. Determinación de las representaciones de cada curva. Para el caracol se tienen dos representaciones: r 6 4cos( ) , r 6 4cos( )= + θ = − + θ .
Para la parábola se tienen dos representaciones:
4 4
r , r1 cos( ) 1 cos( )
= = −+ θ − π − θ − π
.
Paso 2. Búsqueda de los puntos de intersección.
Sistemas a resolver de acuerdo a las representaciones establecidas: r 6 4cos( )
4r
1 cos( )
= + θ = + θ − π
, r 6 4cos( )
4r
1 cos( )
= − + θ = + θ − π
, r 6 4cos( )
4r
1 cos( )
= + θ = − − θ − π
, r 6 4 cos( )
4r
1 cos( )
= − + θ = − − θ − π
Del primer sistema se tiene que:
2
46 4cos( ) (6 4cos( ))(1 cos( )) 4
1 cos( )(6 4cos( ))(1 cos( )) 4
6 6cos( ) 4 cos( ) 4cos ( ) 4
+ θ = ⇒ + θ + θ − π =+ θ − π
⇒ + θ − θ =
⇒ − θ + θ − θ =
2 22 2cos( ) 4cos ( ) 0 2cos ( ) cos( ) 1 0
1 1 4.2.1 1 3cos( )
4 4
⇒ − θ − θ = ⇒ θ + θ − =
− ± + − ±⇒ θ = =
De modo que se derivan dos situaciones: cos( ) 1 2k (k Z)θ = − ⇒ θ = π + π ∈ , 51
2 3 3cos( ) 2k (k Z) y 2k (k Z)π πθ = ⇒ θ = + π ∈ θ = + π ∈ .
Si se toma 0,2θ ∈ π , entonces se tienen los ángulos 53 3
, ,π ππ .
Las coordenadas polares de los puntos de intersección serían 53 3
(2, ) , (8, ) , (8, )π ππ .
De acuerdo al gráfico del inciso anterior, ya se encontraron todos los puntos de
intersección, por tanto, no hace falta resolver los demás sistemas.
Paso 3. Verificación del polo como punto de intersección.
De acuerdo al gráfico, el polo no es un punto de intersección.
11. Calcule el área de la región dentro de la circunferencia r 3sen( )= θ y fuera del caracol
r 2 sen( ).= − θ
Solución.
Puntos de intersección entre las dos curvas: (3 /2, / 6)π y (3 /2,5 /6)π .
Gráfico: (ver figura 59)

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 116 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 59. Gráfica del ejercicio 11
/22 2
/6
1A 2. ((3sen( )) (2 sen( )) )d 3 3
2
π
π
= θ − − θ θ =∫ .
12. Sean las ecuaciones en coordenadas polares
3
r 1 sen( ) y r1 2sen( )
= + θ =+ θ
.
a. Identifique y grafique cada curva en un mismo sistema.
Solución.
Paso 1. Identificación de la primera curva.
2r 1 sen( ) 1 cos( )π= + θ = + θ − .
Como a / b 1= , entonces se trata de un cardioide con ángulo de rotación igual a / 2π
radianes.
Paso 2. Identificación de la segunda curva.
2
3 3r
1 2sen( ) 1 2cos( )π= =
+ θ + θ −.
Se tiene que la excentricidad es igual a 2, por lo tanto se trata de una hipérbola con ángulo de rotación igual a / 2π radianes.
Paso 3. Gráfico de las curvas en un mismo sistema.
(Ver figura 60)

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 117 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
Figura 60. Representación gráfica de las curvas en polares del ejercicio 12
b. Calcule los puntos de intersección entre estas curvas.
Solución.
Paso 1. Determinación de las representaciones de cada curva. Para el cardioide se tienen dos representaciones:
2 2r 1 cos( ) , r 1 cos( )π π= + θ − = − + θ − .
Para la hipérbola se tienen dos representaciones:
2 2
3 3r , r
1 2cos( ) 1 2 cos( )π π= = −
+ θ − − θ −.
Paso 2. Búsqueda de los puntos de intersección.
Sistemas a resolver de acuerdo a las representaciones establecidas:
2
2
r 1 cos( )
3r
1 2cos( )
π
π
= + θ − = + θ −
, 2
2
r 1 cos( )
3r
1 2cos( )
π
π
= − + θ − = + θ −
,
2
2
r 1 cos( )
3r
1 2cos( )
π
π
= + θ − = − − θ −
, 2
2
r 1 cos( )
3r
1 2cos( )
π
π
= − + θ − = − − θ −
Del primer sistema se tiene que:
2
2
31 sen( ) (1 2sen( ))(1 sen( )) 3 1 3sen( ) 2sen ( ) 3
1 2sen( )
2 3sen( ) 2sen ( ) 0
3 9 4.2.2 3 25 3 5sen( )
4 4 4
+ θ = ⇒ + θ + θ = ⇒ + θ + θ =+ θ
⇒ − + θ + θ =
− ± + − ± − ±⇒ θ = = =

EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 118 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
De modo que se derivan dos situaciones: sen( ) 2 No tiene soluciónθ = − ⇒ , 51
2 6 6sen( ) 2k (k Z) y 2k (k Z)π πθ = ⇒ θ = + π ∈ θ = + π ∈ .
Si se toma 0,2θ ∈ π , entonces se tienen los ángulos 56 6,π π .
Las coordenadas polares de los puntos de intersección serían 3 3 52 6 2 6
( , ) , ( , )π π .
De acuerdo al gráfico del inciso anterior, ya se encontraron todos los puntos de
intersección, por tanto, no hace falta resolver los demás sistemas.
Paso 3. Verificación del polo como punto de intersección.
De acuerdo al gráfico, el polo no es un punto de intersección.
13. Sean las ecuaciones en coordenadas polares r cos(2 ) y r sen( )= θ = θ .
a. Identifique y grafique cada curva en un mismo sistema.
Solución.
Paso 1. Identificación de la primera curva. r c os(2 )= θ . Se trata de una rosa de cuatro pétalos.
Paso 2. Identificación de la segunda curva.
2r sen( ) cos( )π= θ = θ − .
Se trata de una circunferencia que pasa por el polo, de radio ½ y con ángulo de rotación igual a / 2π radianes.
Paso 3. Gráfico de las curvas en un mismo sistema.
(Ver figura 61)
Figura 61. Representación gráfica de las curvas en polares del ejercicio 13
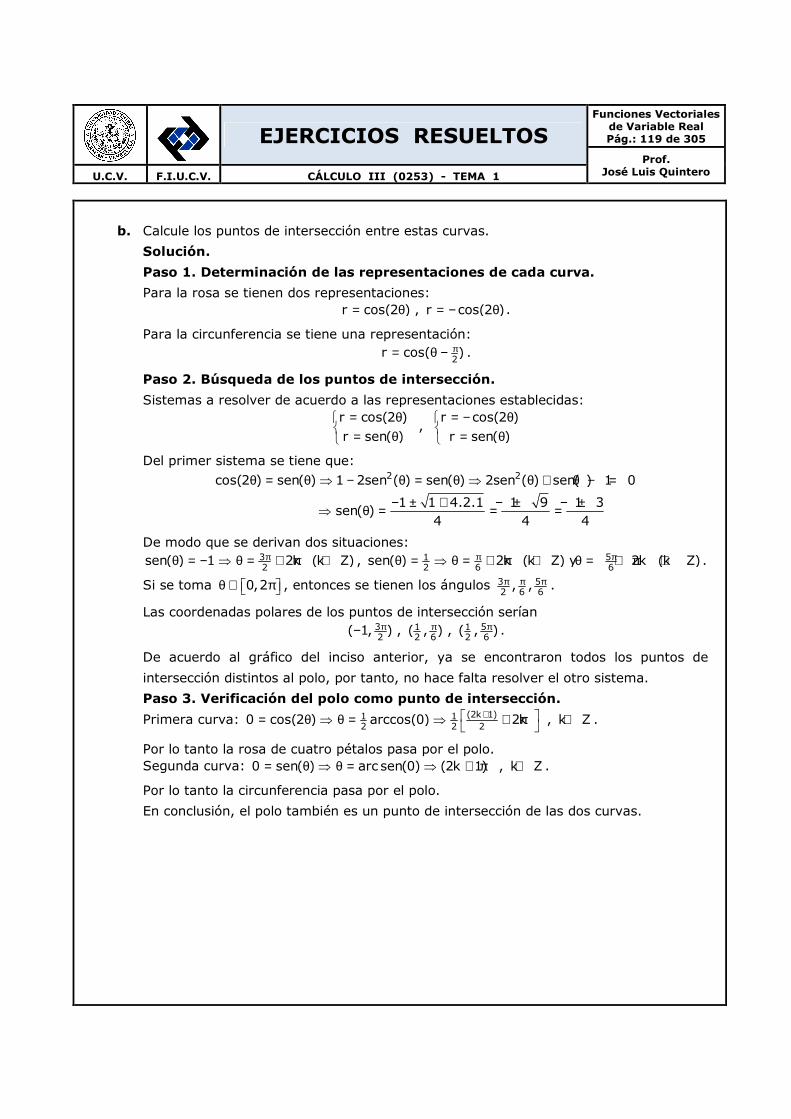
EJERCICIOS RESUELTOS Funciones Vectoriales
de Variable Real Pág.: 119 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. Calcule los puntos de intersección entre estas curvas.
Solución.
Paso 1. Determinación de las representaciones de cada curva.
Para la rosa se tienen dos representaciones: r cos(2 ) , r cos(2 )= θ = − θ .
Para la circunferencia se tiene una representación:
2r cos( )π= θ − .
Paso 2. Búsqueda de los puntos de intersección.
Sistemas a resolver de acuerdo a las representaciones establecidas: r cos(2 )r sen( )
= θ = θ
, r cos(2 )r sen( )= − θ
= θ
Del primer sistema se tiene que:
2 2cos(2 ) sen( ) 1 2sen ( ) sen( ) 2sen ( ) sen( ) 1 0
1 1 4.2.1 1 9 1 3sen( )
4 4 4
θ = θ ⇒ − θ = θ ⇒ θ + θ − =
− ± + − ± − ±⇒ θ = = =
De modo que se derivan dos situaciones: 3
2sen( ) 1 2k (k Z)πθ = − ⇒ θ = + π ∈ , 51
2 6 6sen( ) 2k (k Z) y 2k (k Z)π πθ = ⇒ θ = + π ∈ θ = + π ∈ .
Si se toma 0,2θ ∈ π , entonces se tienen los ángulos 3 52 6 6
, ,π π π .
Las coordenadas polares de los puntos de intersección serían 3 51 1
2 2 6 2 6( 1, ) , ( , ) , ( , )π π π− .
De acuerdo al gráfico del inciso anterior, ya se encontraron todos los puntos de
intersección distintos al polo, por tanto, no hace falta resolver el otro sistema.
Paso 3. Verificación del polo como punto de intersección.
Primera curva: (2k 1)1 12 2 2
0 cos(2 ) arccos(0) 2k , k Z+ = θ ⇒ θ = ⇒ + π ∈
.
Por lo tanto la rosa de cuatro pétalos pasa por el polo. Segunda curva: 0 sen( ) arc sen(0) (2k 1) , k Z= θ ⇒ θ = ⇒ + π ∈ .
Por lo tanto la circunferencia pasa por el polo.
En conclusión, el polo también es un punto de intersección de las dos curvas.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 120 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
1.46. EJERCICIOS PROPUESTOS
1. Calcule el dominio de las siguientes funciones:
a. f 22
2t(t) ln(t), 1 t ,
4 t
= + −
b. g1
(t) arcsen(t), ,1t 1
= −
c. h1
(t) t, , 1 tt
= −
d. k(t) ( 1 t, 1 t)= + −
e. m2
2
t 1 t(t) ,
t 1 t 1
−= + −
f. p 2 2(t) (ln(t t 1),ln(t 1))= + + +
g. r(t) (t,arcsen(t),ln(t))=
2. Dadas las siguientes funciones vectoriales describa su rango:
a. r 2 2(t) (2 t ,1 2t )= + −
b. r(t) (2cos(t),3sen(t),2)=
c. r 2(t) (3t,1 2t )= −
d. r(t) (1 2cos(3t), 2 sen(3t))= + − +
e. r1
(t) t,t 1
= −
f. r1
(t) 2, t,t 1
= −
g. r(t) (sen(t),cos(2t))=
h. r 2(t) (sen(t),2cos (t))=
i. r 2(t) (t 1,2t 1, 3)= − + −
Rta. 2x y 5+ =
Rta. 22 yx
4 9 1 , z 2+ = =
Rta. 229 x y 1+ =
Rta. 2(x 1) 2
4 (y 2) 1− + + =
Rta. 1x 1
y −=
Rta. 1y 1z , x 2−= =
Rta. 22x y 1+ =
Rta. 22x y 2+ =
Rta. 22(x 1) y 1 , z 3+ = − = −
3. Dada la curva r 2 2(t) (t 1, t 1)= + − , demuestre que describe una curva no simple y
encuentre los valores de t para los cuales se autointersecta.
4. Parametrice la curva:
a. ln(ln(x 1) 1)
yln(x 1) 1
+ +=+ −
tomando como parámetro un t para el cual t ln(x 1).= +
b. 2y x 3xy− = tomando como parámetro un t para el cual 2x ty= .

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 121 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
c. 3 3y x 3xy+ = tomando como parámetro un t para el cual y tx= .
d. 2y x(x y) 0− + = tomando como parámetro un t para el cual t x y= + .
5. En la figura 1, la circunferencia de radio a es fija y para todo valor del ángulo t, 0 t< < π ,
P es el punto medio del segmento QR. Encuentre las ecuaciones paramétricas de la curva
descrita por P.
Figura 1. Gráfica del ejercicio 5
6. En la figura 2, la circunferencia de radio a es fija y para todo valor del ángulo t, 0 t / 2≤ < π , P es el punto tal que OP AB= . Encuentre las ecuaciones paramétricas de la
curva descrita por P.
Figura 2. Gráfica del ejercicio 6

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 122 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
7. En los siguientes ejercicios, determine si los vectores dados son ortogonales, paralelos o
ninguno de ellos. a. u i j v i j3 5 y 6 10= + = − −
b. u i j v i j2 3 y 6 4= + = −
c. u i j v i j2 3 y 6 4= + = +
d. u i j v i j2 3 y 6 4= + = − +
8. Sean u i j v i j3 4 y .= + = + α Determine α tal que:
a. u y v sean ortogonales
b. u y v sean paralelos c. el ángulo entre u y v sea 2 3π
d. el ángulo entre u y v sea 3π
9. Halle un vector de magnitud 2 2 y que forme un ángulo de 30� con la dirección positiva
del eje x.
10. Halle un vector unitario que forme un ángulo de 45� con el lado positivo del eje y.
11. En los siguientes ejercicios encuentre el producto cruz u v× : a. u i j v k2 ; 3= − =
b. u i j v j k;= − = +
c. u i j v i k2 3 ; 7 4= − + = +
d. u i j k v i j k2 3 ; 6 4 2= − + = + −
12. Determine una parametrización de las siguientes curvas en el sentido indicado:
a. 2 2x y 3+ = ; horario y antihorario
b. 2 2x y 4− = ; horario
c. x y 1+ = ; antihorario
d. y 1 x , 2 x 2= − − ≤ ≤ , de izquierda a derecha
e.
2y 4 x 2 x 2y 0 2 x 1 , 1 x 2
y x 1 1 x 0y x 1 0 x 1
= − − ≤ ≤
= − < < − < ≤
= + − ≤ < = − + ≤ ≤
, antihorario
f.
2y 1 x 0 x 1x 0 1 y 1
y x 1 0 0 x 1
= − ≤ ≤ = − ≤ ≤ − + = < ≤
, antihorario
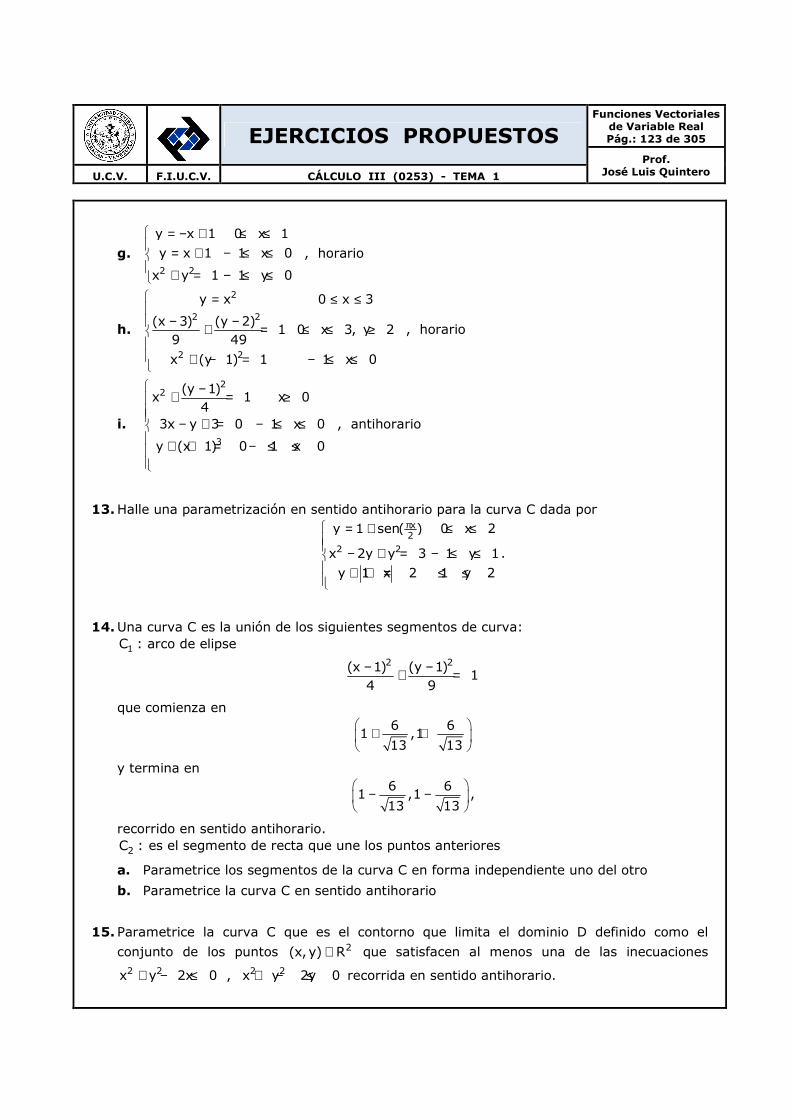
EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 123 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
g. 2 2
y x 1 0 x 1y x 1 1 x 0
x y 1 1 y 0
= − + ≤ ≤ = + − ≤ ≤ + = − ≤ ≤
, horario
h.
2
2 2
2 2
y x 0 x 3
(x 3) (y 2)1 0 x 3, y 2
9 49
x (y 1) 1 1 x 0
= ≤ ≤
− − + = ≤ ≤ ≥ + − = − ≤ ≤
, horario
i.
22
3
(y 1)x 1 x 0
43x y 3 0 1 x 0
y (x 1) 0 1 x 0
−+ = ≥ − + = − ≤ ≤ + + = − ≤ ≤
, antihorario
13. Halle una parametrización en sentido antihorario para la curva C dada por x2
2 2
y 1 sen( ) 0 x 2
x 2y y 3 1 y 1y 1 x 2 1 y 2
π = + ≤ ≤ − + = − ≤ ≤ + + = ≤ ≤
.
14. Una curva C es la unión de los siguientes segmentos de curva:
1C : arco de elipse 2 2(x 1) (y 1)
14 9− −+ =
que comienza en 6 6
1 ,113 13
+ +
y termina en 6 6
1 ,113 13
− −
,
recorrido en sentido antihorario.
2C : es el segmento de recta que une los puntos anteriores
a. Parametrice los segmentos de la curva C en forma independiente uno del otro
b. Parametrice la curva C en sentido antihorario
15. Parametrice la curva C que es el contorno que limita el dominio D definido como el
conjunto de los puntos 2(x,y) R∈ que satisfacen al menos una de las inecuaciones 2 2 2 2x y 2x 0 , x y 2y 0+ − ≤ + − ≤ recorrida en sentido antihorario.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 124 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
16. Calcule los siguientes límites:
a. t 0
1lím t,
t 1→
+
b. t 0
sen(t)lím ,1
t→
c. 1 / t2t 0
1lím (1 t) ,
t 1→
+ +
d. 2
3 2 2t 1
t 1 tlím ,ln(t),
t t t 1 t 1→
− − + − +
e. t 0
sen(3t) tlím ,
2t cos(t)→
f. 2t 0
1 cos(t) 1 cos(t)lím ,
t t→
− −
17. Estudie la continuidad de las siguientes funciones:
a. rln(t 1)
t, ,2 t 0(t) t
(0,1,5) t 0
+ ≠ = =
b. r2
3
tt 1, t 1
t t 1(t)
sen(t 1)1 , t 2t 1 t 1
t 1
+ ≤ − + = − + − + > −
c. r23
sen(2t) cos(2t) sen(4t), , t 0
sen(3t) cos(3t) cos(5t)(t)
( ,1,1) t 0
≠ = =
18. Pruebe que la curva descrita por r 3 2(t) (t 4t, t )= − se intersecta a si misma en el punto
(0,4) y halle las ecuaciones de las dos rectas tangentes en ese punto.
19. Calcule la velocidad, rapidez y aceleración para las partículas cuya posición está dada por:
a. r t t t(t) (e sen(t),e t,e cos(t))− − −=
b. r (t) (3sen(t),4 cos(t), t / 2) t / 2= = π
c. r 4 2 3(t) (t 2t , t )= −
d. r 2 2(t) (sen (t),sen(t ))=
e. r (t) (t cos(t) sen(t), t cos(t)) t 0= − + =
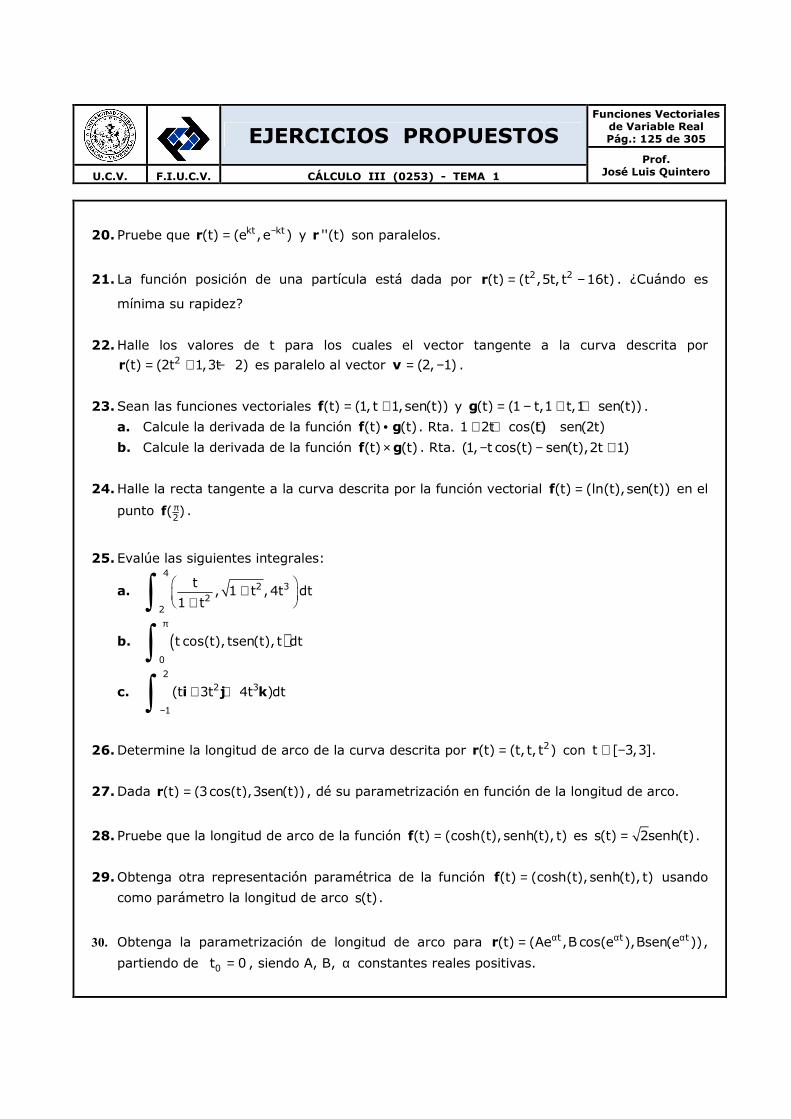
EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 125 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
20. Pruebe que r kt kt(t) (e ,e )−= y r ''(t) son paralelos.
21. La función posición de una partícula está dada por r 2 2(t) (t ,5t, t 16t)= − . ¿Cuándo es
mínima su rapidez?
22. Halle los valores de t para los cuales el vector tangente a la curva descrita por
r 2(t) (2t 1,3t 2)= + − es paralelo al vector v (2, 1)= − .
23. Sean las funciones vectoriales f(t) (1, t 1,sen(t))= + y g(t) (1 t,1 t,1 sen(t))= − + + .
a. Calcule la derivada de la función f g(t) (t)• . Rta. 1 2t cos(t) sen(2t)+ + +
b. Calcule la derivada de la función f g(t) (t)× . Rta. (1, t cos(t) sen(t),2t 1)− − +
24. Halle la recta tangente a la curva descrita por la función vectorial f(t) (ln(t),sen(t))= en el
punto f2
( )π .
25. Evalúe las siguientes integrales:
a.
42 3
22
t, 1 t ,4t dt
1 t
+ + ∫
b. ( )
0
t cos(t), tsen(t), t dtπ
∫
c.
i j k2
2 3
1
(t 3t 4t )dt−
+ +∫
26. Determine la longitud de arco de la curva descrita por r 2(t) (t, t, t )= con t [ 3,3].∈ −
27. Dada r(t) (3cos(t),3sen(t))= , dé su parametrización en función de la longitud de arco.
28. Pruebe que la longitud de arco de la función f(t) (cosh(t), senh(t), t)= es s(t) 2senh(t)= .
29. Obtenga otra representación paramétrica de la función f(t) (cosh(t), senh(t), t)= usando
como parámetro la longitud de arco s(t).
30. Obtenga la parametrización de longitud de arco para r t t t(t) (Ae ,B cos(e ),Bsen(e ))α α α= ,
partiendo de 0t 0= , siendo A, B, α constantes reales positivas.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 126 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
31. Sea r una función vectorial dada por
r2
2 2
2t 1 t(t) , ,1
1 t 1 t
−= + + .
Pruebe que el ángulo formado por r(t) y r'(t) es constante, es decir, no depende de t.
32. Dada la curva
r3
2t(t) t, t
3
= −
:
a. Encuentre los valores de t para los cuales la curva se autointersecta
b. Encuentre la longitud del lazo de curva determinado en el apartado anterior
33. Escriba la ecuación de un plano que contenga los puntos P(1, 1,2), Q(3,2,0) y R( 1,1,4)− − .
34. Halle los puntos de intersección del plano de ecuación 3x 5y z 2 0+ − + = y la recta de
ecuaciones paramétricas: x 3 2t, y 4 t, z 1 3t= − + = + = − − .
35. Halle los máximos y mínimos y estudie la concavidad de r 3(t) (t(t 1), t 1)= − − .
36. En cada caso, estudie en forma detallada y grafique la curva, indicando la dirección de la
trayectoria:
a. r2t t
(t) ,t 1 t 1
= + −
b. r2
2
2t t 1(t) ,
t1 t
+= −

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 127 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
c. rte t
(t) ,t t 1
= −
d. r2 2
2
t t(t) ,
1 t 1 t
= − −
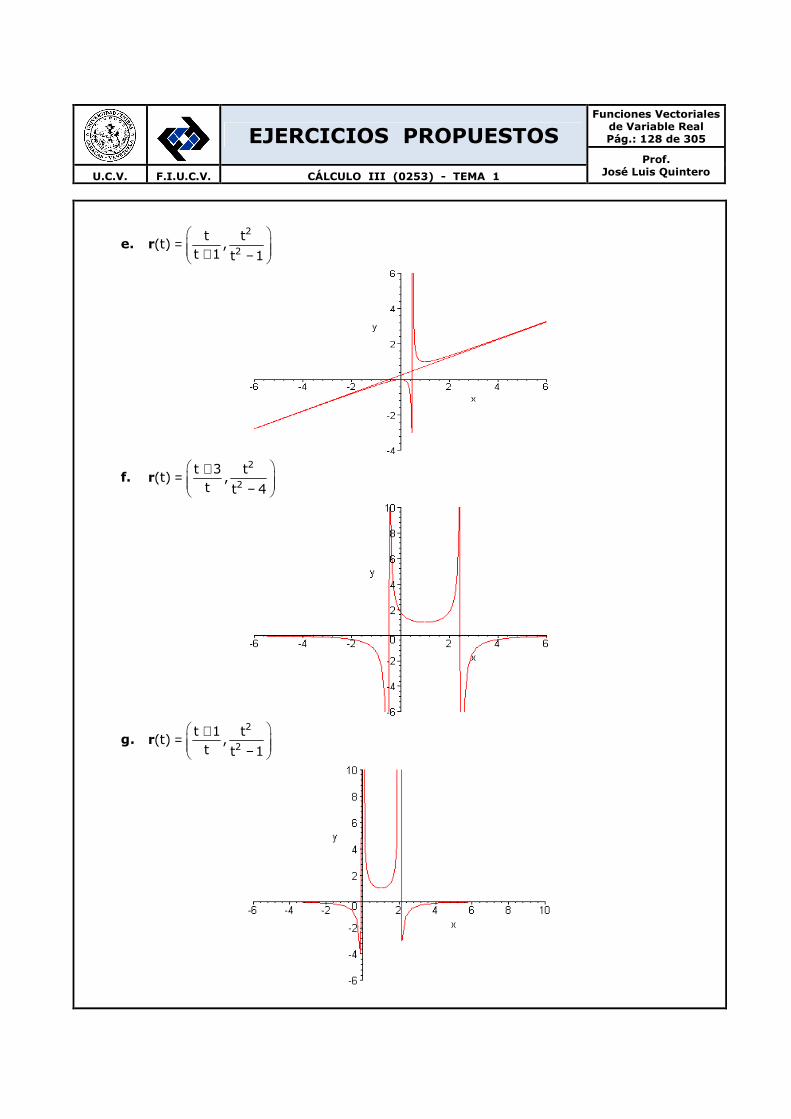
EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 128 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
e. r2
2
t t(t) ,
t 1 t 1
= + −
f. r2
2
t 3 t(t) ,
t t 4
+= −
g. r2
2
t 1 t(t) ,
t t 1
+= −

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 129 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
h. r 1 / t 1(t) e ,
t 1 = −
i. r2 3
2 2
t t(t) ,
1 t 1 t
= − −
j. r2 3
3 2
t t(t) ,
1 t 1 t
= − −

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 130 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
37. Sea la curva de ecuación
r2 1
(t) ,ln(t 2)t t 1
= ++
,
cuya gráfica se muestra en la figura 3. Realice un estudio completo e indique el sentido de
su trayectoria.
Figura 3. Gráfica del ejercicio 37
38. Demuestre que r r r
Nr r r
'(t) ''(t) '(t)(t)
'(t) ''(t) '(t)
× × =× ×
.
39. Determine los vectores T(t) y N(t) en el punto indicado en cada una de las siguientes
curvas:
a. r 3 2(t) (t 3t,3t ) ; t 2= − =
b. r t t(t) (e ,e ) ; t 0−= =
c. r (t) (t sen(t),1 cos(t)) ; t= − − = π
40. Determine los vectores T(t) , N(t) y B(t) en el punto indicado en cada una de las
siguientes curvas:
a. r 2(t) (t 1, t ,1 2t) ; t 1= + − − = −
b. r t t t(t) (e cos(t),e sen(t),e ) ; t 0= =
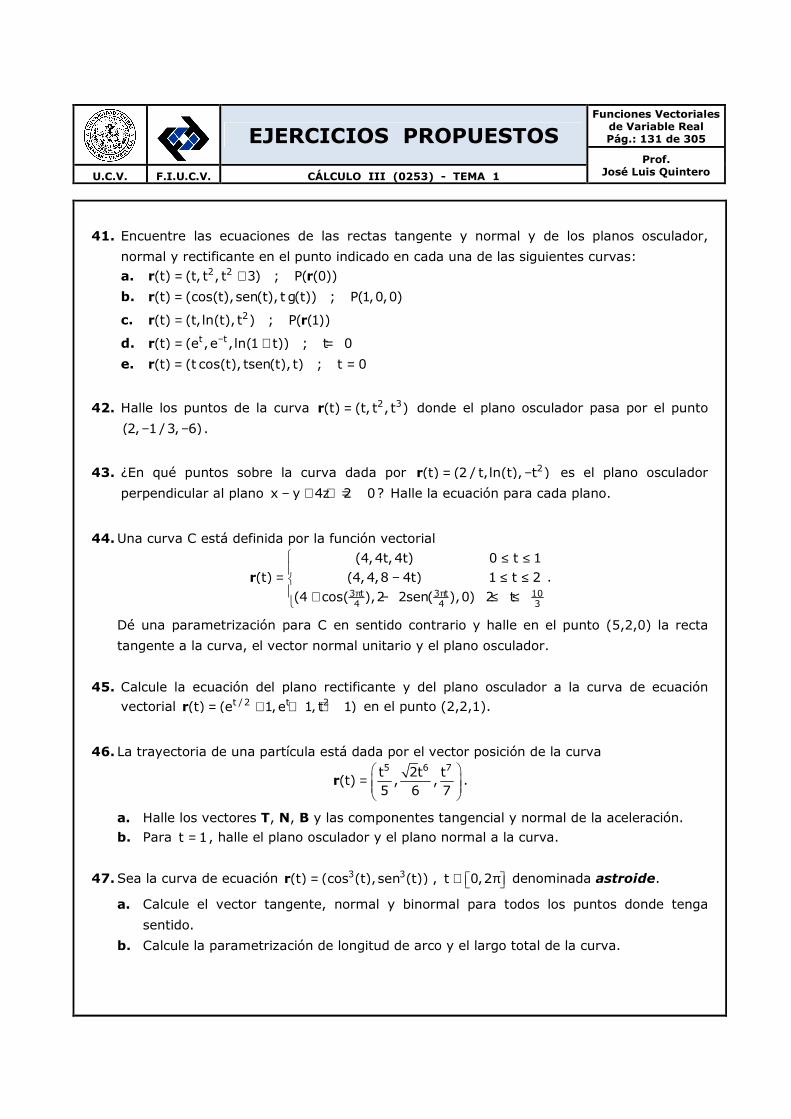
EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 131 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
41. Encuentre las ecuaciones de las rectas tangente y normal y de los planos osculador,
normal y rectificante en el punto indicado en cada una de las siguientes curvas:
a. r r2 2(t) (t, t , t 3) ; P( (0))= +
b. r (t) (cos(t),sen(t), t g(t)) ; P(1,0,0)=
c. r r2(t) (t,ln(t), t ) ; P( (1))=
d. r t t(t) (e ,e ,ln(1 t)) ; t 0−= + =
e. r (t) (t cos(t), tsen(t), t) ; t 0= =
42. Halle los puntos de la curva r 2 3(t) (t, t , t )= donde el plano osculador pasa por el punto
(2, 1 /3, 6)− − .
43. ¿En qué puntos sobre la curva dada por r 2(t) (2 / t,ln(t), t )= − es el plano osculador
perpendicular al plano x y 4z 2 0?− + + = Halle la ecuación para cada plano.
44. Una curva C está definida por la función vectorial
r3 t 3 t 104 4 3
(4,4t,4t) 0 t 1(t) (4,4,8 4t) 1 t 2
(4 cos( ),2 2sen( ),0) 2 tπ π
≤ ≤= − ≤ ≤ + − ≤ ≤
.
Dé una parametrización para C en sentido contrario y halle en el punto (5,2,0) la recta
tangente a la curva, el vector normal unitario y el plano osculador.
45. Calcule la ecuación del plano rectificante y del plano osculador a la curva de ecuación
vectorial r t / 2 t 2(t) (e 1,e 1, t 1)= + + + en el punto (2,2,1).
46. La trayectoria de una partícula está dada por el vector posición de la curva
r5 6 7t 2t t
(t) , ,5 6 7
=
.
a. Halle los vectores T, N, B y las componentes tangencial y normal de la aceleración.
b. Para t 1= , halle el plano osculador y el plano normal a la curva.
47. Sea la curva de ecuación r 3 3(t) (cos (t),sen (t)) , t 0,2= ∈ π denominada astroide.
a. Calcule el vector tangente, normal y binormal para todos los puntos donde tenga
sentido.
b. Calcule la parametrización de longitud de arco y el largo total de la curva.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 132 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
48. Las coordenadas de una partícula en el tiempo t, son
2
x(t) sen(t) t cos(t)y(t) cos(t) tsen(t)
z(t) t
= − = + =
, t 0≥ .
Halle la rapidez de la partícula y las componentes normal y tangencial de la aceleración en
cualquier instante t.
49. El vector de posición de una partícula es r t t(t) (e ,e ,2t)−= . Calcule las componentes del
vector aceleración para el punto que corresponde a t ln(2).=
50. Una partícula se mueve a lo largo de la curva de ecuación r 2(t) (2t,ln(t), t )= . Calcule la
componente tangencial y normal de la aceleración en un punto donde el plano osculador es paralelo al plano 2x 2y z 0.− − =
51. Determine la curvatura de la curva de ecuación vectorial:
a. r 2 2(t) (t 1, t 1, t) en P(2,0,1)= + −
b. r r2(t) (ln(t), t, t ) en P( (1))=
c. r 2 3(t) (t 2t, t t) en t 1= − − =
d. r 1 1
(t) , en t 01 t 1 t = = + −
e. r (t) (at asen(t),a acos(t)) en t / 2 y t= − − = π = π
52. Calcule el radio y centro de curvatura de la curva de ecuación: a. r 2t 2t(t) (cos(t),3e ,3e )−= en P(1,3,3).
b. r 2 2 3(t) (1 2t,1 t t ,1 t t t )= + + − − + − en P(1,1,1).
c. r 3 2(t) (t , t , t)= en el punto donde su plano osculador es perpendicular al plano
6x y z 0+ − = .
d. 2xy e−= en P(0,1).
53. Para la gráfica de 2y x= calcule:
a. La curvatura en un punto arbitrario.
b. ¿En qué punto la curvatura alcanza su valor máximo?
La circunferencia osculatriz en los puntos donde la curvatura es igual a 1/4.
54. Encuentre los puntos de mínima curvatura para r 3 3(t) (cos (t),sen (t),cos(2t))= .

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 133 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
55. Demuestre que la curvatura de la parábola de n-ésimo orden ny x= es n 1
2 2n 2 3/2
n(n 1) x(x)
(n x x )
+−κ =
+.
56. La evoluta de una curva re( (t)) es el lugar geométrico de los centros de curvatura de
dicha curva. Pruebe que: a. La evoluta de una curva r(t) (x(t), y(t))= viene dada por
r2 2 2 2
e(x '(t)) (y '(t)) (x '(t)) (y '(t))
(t) x(t) y '(t) ,y(t) x '(t)x '(t)y ''(t) x ''(t)y '(t) x '(t)y ''(t) x ''(t)y '(t)
+ += − + − − .
b. Los centros de curvatura de 2y x= se encuentran sobre la curva
r2
3 6t 1(t) 4t ,
2
+= −
.
57. Un punto se mueve en el espacio según la función vectorial r(t) (4 cos(t),4sen(t),4cos(t))= .
Pruebe que el radio de curvatura es
3/22(t) 2 2 1 sen (t) ρ = +
.
58. Halle los puntos de la gráfica de 3y (x 1) 3= − + en los que la curvatura es cero.
59. Sea C la curva de ecuación
r 2 2(t) (t t 1, t 1, t 2)= + + − + .
a. Demuestre que C es una curva plana y halle el plano que la contiene. b. Halle el plano rectificante en el punto (1, 1,2)− .
c. Halle el centro y el radio de la circunferencia osculatriz en el punto (1, 1,2)− .
60. Calcule la torsión de la curva descrita por:
a. r 2 20(t) (1 t ,1 t, 2t ) en t t= − + − =
b. r 0(t) (2cos(t) sen(t), sen(t),cos(t)) en t t (0 t 2 )= − = ≤ ≤ π
c. 2t2
(t) (tsen(t) cos(t), t cos(t) sen(t), ) en t= + − = πr
d. r r2 2(t) (ln(t 1) ,ln(t 1),(t 1) ) en P( (2))= − − −

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 134 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
61. Demuestre que las siguientes curvas son planas y halle la ecuación del plano que las
contiene:
a. r22t 1 t
(t) , , t 2t 1 t 1
+= + − −
b. r2
1 t 1 1(t) , ,
1 t 1 t1 t
+ = − +−
c. r(t) (cos(t),sen(t),1 cos(t) sen(t))= − −
d. r 2 2(t) (2t 1, t , t 2)= + +
e. r 2 2(t) (2 t,1 t ,3t t )= + + +
62. Sea C la curva descrita por r(t) (acos(t),7 sen(t),b cos(t))= − . Pruebe que la curva es:
a. plana b. una circunferencia sólo si 2 2a b 1+ =
63. Sea la curva dada por
r(t) (4cos(7t) 21 3t,8sen(7t),4 3 cos(7t) 21t)= − + .
a. Obtenga la parametrización de la curva usando la longitud de arco a partir del punto
correspondiente a t 0= .
b. Calcule la curvatura y la torsión en cada punto.
64. Demuestre que la curva descrita por r(t) (acos(t),asen(t),bt)= tiene curvatura y torsión
iguales en todos sus puntos si y sólo si a b.=
65. La posición instantánea de una partícula es
r4 3
(t) cos(t),7 sen(t), cos(t)5 5 = − −
.
a. Pruebe que el recorrido es una circunferencia. Determine su radio y su centro.
b. Halle la ecuación del plano donde se efectúa el movimiento.
66. La posición instantánea de una partícula viene dada por r(t) (3cos(t),4sen(t),2t).=
a. Calcule el punto donde su velocidad es perpendicular al plano 2x y z 1− + = .
b. Calcule el punto donde el plano normal es perpendicular al plano 2x y z 1− + =
c. Calcule la curvatura, centro de curvatura y torsión en el punto de la parte b.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 135 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
67. Dada la curva r 2 3 2(t) (2t 1, t , t )= + , en el punto P(9,8,4) calcule:
a. Ecuación de los planos osculador y normal
b. Curvatura
c. Centro de curvatura
d. Torsión
68. Pruebe que la curva dada por
r2 2 2
1 3 5(t) 1, 2, 1
t t t = + + −
es una recta.
69. Dada la curva definida por r(t) (acos(t),asen(t), f(t))= pruebe que ésta es plana si f(t) es
solución de f '''(t) f '(t) 0.+ =
70. Una partícula tiene aceleración instantánea (1,0,1). Para t 1= está en el punto 3
,3,22
y
tiene velocidad 3
2, 1,2
−
.
a. Deduzca la posición instantánea de la partícula.
b. Pruebe que el movimiento se realiza en un plano y dé su ecuación.
71. Determine la torsión de la curva descrita por
r22t 1 t
(t) , , t 2t 1 t 1
−= + − − .
Razone su respuesta.
72. Para los siguientes puntos dados en coordenadas polares, halle las coordenadas
cartesianas correspondientes: a. (4, / 4)π
b. (3,5 /6)π
c. (2,0) d. ( 4, /3)− π
e. ( 2, 7 / 6)− − π
73. Se dan las coordenadas cartesianas de un punto. Encuentre las coordenadas polares (r, )θ
del punto donde r 0> y 0 2≤ θ ≤ π . a. ( 1,1)−
EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 136 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
b. (0, 5)−
c. (2 3, 2)−
d. ( 1, 3)− −
74. Encuentre la ecuación polar de las siguientes cartesianas: a. 2 2 2 2(x y ) 2a xy+ = . Rta. 2 2r a sen(2 )= θ
b. 2 3y (2a x) x− = . Rta. r 2asen( )tg( )= θ θ
c. 2 2 3 2 2(x y ) 4x y+ = . Rta. 2 2r sen (2 )= θ
d. 4 2 2x x (x y) 0+ − + = . Rta. r (1 tg( ))= ± + θ
e. 2 2 3 2 2 2 2 2(x y ) 6x y (x y )+ = − . Rta. r csc(4 )= ± θ
f. 2 2 2 2 2 2 2 316x y (x y ) (x y )− = +
g. xy 4=
75. Encuentre la ecuación cartesiana de las siguientes ecuaciones en coordenadas polares:
a. r 1 cos( )= − θ . Rta. 2 2 2 2 2(x y x) x y+ + = +
b. r 2 cos( ) 3sen( )= θ + θ . Rta. 2 2x y 2x 3y 0+ − − =
c. r 3 / (2 3sen( ))= + θ . Rta. 2 24x 5y 18y 9 0− + − =
d. r a= θ . Rta. 2 2 2 2 2(x y ) a (arctg(y / x))+ =
e. r 9 cos(2 )= θ . Rta. 2 2 2 2 2(x y ) 9(x y )+ = −
76. Halle la ecuación polar de la recta que pasa por el punto en coordenadas polares: a. (6,2 /3)π y es perpendicular al eje polar.
b. (2 2,3 / 4)π y es paralela al eje polar.
c. (4,5 /6)π y es tal que su distancia al polo es igual a 2 3 .
d. (4 3, /2)π y forma un ángulo 2 /3α = π con el eje polar.
e. (4,2 /3)π y por el punto en coordenadas polares (2 2, / 4).π
77. Encuentre la ecuación de la circunferencia con centro: a. (a, )α y pasa por el polo Rta. r 2acos( )= θ − α
b. En la recta / 3θ = π y pasa por (5, /2)π y (0,0) Rta. 2 10r cos( /3)
3= θ − π
c. Sobre la recta 3 / 4θ = π , radio 5 y pasa por el polo Rta. r 10cos( 3 / 4)= θ − π
78. Demuestre que los puntos A(1, /3), B( 3, / 6)π π y C(1,0) son los vértices de un
triángulo equilátero.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 137 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
79. Demuestre que 32 3P( 3, )π es el punto medio del segmento cuyos extremos son
(3, / 6) y (3, /2).π π
80. Halle la distancia del punto R(1, /6)π a la recta r cos( /3) 2θ − π = . Rta. 2 3−
81. Encuentre las ecuaciones de las siguientes cónicas con foco en el polo, excentricidad y
directrices dadas por: a. e 1 r cos( ) 4= θ = − Rta. r 4 / (1 cos( ))= − θ
b. e 1 / 2 r cos( ) 2= θ = Rta. r 2 / (2 cos( ))= + θ
c. e 2 r cos( / 3) 3= θ + π = Rta. r 6 /(1 2 cos( /3))= + + θ + π
82. Encuentre la excentricidad y la directriz de cada una de las siguientes cónicas. Dar su
ecuación cartesiana.
a. r 1 / (1 cos( ))= − θ Rta. 2e 1 ; y 2x 1= = +
b. r 2 / (1 sen( ))= − θ Rta. 2e 1 ; y (x 4) / 4= = −
c. r 4 / (6 sen( ))= + θ Rta. 2 2e 1 /6 ; 36x 35y 8y 16 0= + + − =
d. r 5 / (1 2cos( ))= − + θ
e. r 4 / (2 sen( ))= − − θ
83. Encuentre los puntos de intersección entre las parejas de curvas. a. r 2 cos( ) ; r 2sen( )= θ = θ
b. r 1 cos( ) ; r cos(2 )= − + θ = θ
c. r 4(1 sen( )) ; r(1 sen( )) 3= + θ − θ =
84. Halle la ecuación polar de la recta tangente a r 2 2cos( )= − θ en el punto 2,2π
.
85. Encuentre la ecuación polar de la parábola con foco en el polo y vértice el punto 3
3,4π −
.
86. Para la curva de ecuación cartesiana 2 2 2 2 2x y (x x y )+ = + + :
a. Determine su ecuación polar.
b. Grafique la curva en el sistema de coordenadas polares.
c. Utilice la ecuación obtenida en el apartado a para calcular su longitud.

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 138 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
87. Grafique en un mismo sistema de coordenadas polares las curvas dadas por
13
r 3cos4π = − θ −
y 2
3r 1 cos
4π = − θ −
.
Indique los puntos de intersección entre 1r y 2r y señálelos en el gráfico.
88. Grafique la curva de ecuación polar
r 6 3sen3π = + θ −
.
89. Grafique las curvas
1r 3 3cos6π = − θ −
y 2r 6sen
3π = − θ +
.
90. Dadas las ecuaciones
15
r2 3sen( )
= −+ θ
y 2r 6sen( )= − θ :
a. Identifique y grafique cada curva.
b. Dar todas las ecuaciones que representan dichas curvas.
c. Calcule las intersecciones de las curvas.
d. Grafique 1r 6π θ −
.
91. Identifique y grafique en un mismo sistema polar las curvas de ecuación r 1= , r 2sen(3 )= θ . Halle todos los puntos de intersección y plantee la integral que permite
calcular la longitud de arco de la segunda curva.
92. En un mismo sistema de coordenadas polares grafique e identifique las siguientes curvas:
r 2 cos( )= θ , r 2 cos3π = − − θ
, r 2 cos
3π = − + θ
.
93. Halle en coordenadas polares la ecuación de la cónica de excentricidad 1 y directriz
r cos 2 24π θ − =
.
94. Halle la ecuación polar de la recta tangente en los puntos de tangencia horizontal y vertical de la curva r a(1 cos( ))= + θ .

EJERCICIOS PROPUESTOS Funciones Vectoriales
de Variable Real Pág.: 139 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
95. Suponga que la curva plana C está descrita por r r( )= θ en coordenadas polares. Pruebe
que la curvatura de C viene dada por 2 2
3/22 2
r 2(r ') rr ''( )
r (r ')
+ −κ θ =
+
.
96. Use la fórmula anterior para calcular la curvatura de
a. r 1 sen( )= − θ
b. r = θ (espiral de Arquímedes) c. r a.sen( )= θ
97. Una curva 1C tiene como ecuación cartesiana 2 2 2 2 2(x y 2x) 4(x y )+ − = + .
a. Determine la ecuación polar de 1C e identifíquela.
b. Grafique la curva obtenida anteriormente rotándola / 4π radianes en sentido
antihorario y dé la ecuación polar de la curva rotada. c. Determine los puntos de la curva 1C donde la recta tangente es vertical e indique las
nuevas coordenadas de estos puntos en la curva obtenida en el apartado b. d. Grafique las curvas 2C de ecuación polar r 4cos( )= θ y 1C en el mismo plano.
e. Determine los puntos de intersección entre las curvas 1C y 2C e índiquelos en el
gráfico.
98. Sea C una curva polar descrita por r r( ) , a b= θ ≤ θ ≤ . Pruebe que la longitud de arco de
la curva C viene dada por b
2 2
a
S r (r ') d= + θ∫
99. Identifique y grafique la ecuación polar r 2 2sen( )= − θ y escriba la integral simplificada de
la longitud total de su arco (no la calcule).

BIBLIOGRAFÍA Funciones Vectoriales
de Variable Real Pág.: 140 de 305
Prof. José Luis Quintero U.C.V. F.I.U.C.V. CÁLCULO III (0253) - TEMA 1
[1] APOSTOL, Tom. Calculus. Volumen 2. 2da edición. Reverté (2006).
[2] CRUZ, Cipriano; DE LARA, Leonte, GUNZ, Bárbara y SÁNCHEZ, Mariemma. Coordenadas Polares. Facultad de Ingeniería. UCV (1983).
[3] DU BOUCHERON, Luc. Curvas y Superficies. Facultad de Ingeniería. UCV (1993).
[4] EDWARDS, Henry y PENNEY, David. Cálculo con Trascendentes Tempranas. 7ma
edición. PEARSON PRENTICE HALL (2008).
[5] FEDENKO, A. S. Problemas de Geometría Diferencial. MIR (1981).
[6] GONZÁLEZ, Jesús y BEYER, Walter. Matemática III. Ingeniería. (733). UNA (1993).
[7] GONZÁLEZ, Jesús. Cálculo III. Matemática. (706). UNA (1994).
[8] GUERREIRO, Carlos. Introducción al Maple. Aplicaciones Docentes. Facultad de
Ingeniería. UCV (2002).
[9] GUERREIRO, Carlos. Cálculo III. Facultad de Ingeniería. UCV (2004).
[10] LEITHOLD, Louis. El Cálculo. 7ma edición. OXFORD UNIVERSITY PRESS (1998).
[11] PISKUNOV, N. Calculo Diferencial e Integral. Tomo I. Editorial MIR (1980).
[12] PITA, Claudio. Cálculo Vectorial. PEARSON PRENTICE HALL (1995).
[13] PURCELL, Edwin; VARGERG, Dale y RIGDON, Steven. Cálculo. 9na edición. PEARSON PRENTICE HALL (2007).
[14] RÍOS, Alejandro. Cálculo III. Facultad de Ingeniería. UCV (2002).
[15] SALAS, HILLE y ETGEN. Calculus. Una y Varias Variables. Volumen II. 4ta edición.
REVERTÉ (2007).
[16] STEWART, James. Cálculo. Conceptos y Contextos. 3era edición. THOMSON (2006).
[17] STRUIK, Dirk. Geometría Diferencial Clásica. AGUILAR (1961).
[18] THOMAS, George. Cálculo. Varias Variables. 11ma edición. PEARSON ADDISON
WESLEY (2006).