taller de algebra lineal · · 2010-11-05taller de algebra lineal 3 1.3 diagonalizacion....
TRANSCRIPT
TALLER DE ALGEBRA LINEAL
Luis Hernandez Lamoneda
CIMAT
Julio 1996
§0. 2 PROBLEMAS
PROBLEMA 1. Pronosticar el desempeno de un equipo de futbol en cada partidode la temporada regular en base a informacion recopilada en anteriores actuacionesutilizando para ello cadenas de Markov.
PROBLEMA 2. Dar una clasificacion de las superficies cuadricas en R3.
§1. CADENAS DE MARKOV.
1.1 EL PROBLEMA. Comienza una temporada mas para las Chivas del Guadala-jara. ¿Como les ira esta vez?
PROBLEMA: Pronosticar el desempeno de este equipo a lo largo de la tem-porada.
En anteriores temporadas se observo lo siguiente:
i. Cuando las Chivas perdıan un juego, entonces el siguiente partido lo perdıanun 40% de las veces, lo empataban un 10% de las veces y lo ganaban un 50% delas veces.
ii. Cuando las Chivas empataban un juego, entonces el siguiente partido loperdıan un 20% de las veces, lo empataban un 70% de las veces y lo ganaban un10% de las veces.
iii. Cuando las Chivas ganaban un juego, entonces el siguiente partido loperdıan un 20% de las veces, lo empataban un 20% de las veces y lo ganabanun 60% de las veces.
Para intentar adivinar el resultado de un determinado juego, quisieramos sabercuales son las probabilidades de que ese juego se pierda, empate o gane.
Typeset by AMS-TEX

2 LUIS HERNANDEZ LAMONEDA
1.2 EL MODELO ALGEBRAICO. Sea v = (p, e, g) ∈ R3 el vector cuyas
coordenadas son las probabilidades de estos 3 acontecimientos para un partidodeterminado. Sabemos que p, e, g ∈ [0, 1] y que p + e + g = 1 (i.e. v se encuentraen la interseccion del plano p+ e+ g = 1 con el primer octante de R3).
Supongamos que para el primer partido el equipo tiene las mismas probabilidadesde ganar, empatar o perder; esto es, para este primer encuentro v = (1/3, 1/3, 1/3).¿Cual sera el vector de probabilidades para el segundo juego? Para calcular laprobabilidad de que un evento ocurra debemos tomar todas las instancias posiblesde su ocurrencia y dividir este numero entre todos los posibles eventos. Por ejemplo,para calcular p para el segundo partido consideramos:
pp = primer juego perdido y segundo tambien = 1/3 · 2/5.
ep = primer juego empatado y segundo perdido = 1/3 · 1/5.
gp = primer juego ganado y segundo perdido = 1/3 · 1/5.
Ası p para el segundo juego = pp+ ep+ gp = 4/15 ≈ 27%. De manera analogase calculan e y g para el segundo partido; observamos que, si v2 es el vector deprobabilidades para el segundo juego, entonces
v2 = Av, con A =
2/5 1/5 1/51/10 7/10 1/51/2 1/10 3/5
Definicion. 1. Una matriz real de n×n A = (aij) se llama estocastica si aij ≥ 0para toda i, j y, si para toda j,
∑n
i=1aij = 1.
2. Un vector w = (w1, . . . , wn) ∈ Rn es un vector de probabilidad si∑n
i=1wi = 1 y wi ≥ 0 para toda i.
En general, el vector de probabilidad para el n−esimo juego esta dado por
vn = An−1v;
por ejemplo, la probabilidad de que las Chivas ganen el partido # 5 (el clasico vs.
America) esta dada por la tercera entrada del vector A4
1/31/31/3
. Dos preguntas:
a. ¿Como calcular An de una manera rapida y eficiente?
b. ¿Cual es la tendencia despues de un gran numero de juegos?¿Existe dichatendencia?, i.e. ¿que podemos decir de limn→∞Anv?
EJERCICIO Explora graficamente (con ayuda de MATLAB) la sucesion devectores Anv del problema anterior. ¿Que conjeturas te atreves a proponer en basea este experimento?

TALLER DE ALGEBRA LINEAL 3
1.3 DIAGONALIZACION. Denotamos por GLn al conjunto (de hecho grupo)de matrices (reales o complejas) de n× n que son invertibles.
OBSERVACION: Si Q ∈ GLn y A es cualquier matriz de n × n entonces(Q−1AQ)k = Q−1AkQ. De esta forma, llamando B = Q−1AQ tenemos
Ak = QBkQ−1.
¿Que ganamos con esto?
IDEA: busquemos Q tal que sea facil calcular Bk.
Las matrices para las cuales es mas facil calcular potencias son las diagonales:
si D =
d1 0d2
. . .
0 dn
⇒ Dk =
dk1 0
dk2
. . .
0 dkn
CONCLUSION: quisieramos encontrar Q ∈ GLn tal que Q−1AQ sea diagonal.
DEFINICION. i. Dos matrices de n × n, A y B son semejantes si existeQ ∈ Gln tal que A = QBQ−1.
ii. Una matriz cuadrada es diagonalizable si es semejante a una matriz diag-onal.
EJERCICIOS.
1. Da un ejemplo de una matriz de 2 × 2 que no sea diagonalizable. ¡Pruebalo!
2. Prueba que toda matriz estocastica de 2 × 2 es diagonalizable.
3. Da un ejemplo de una matriz estocastica que no sea diagonalizable.
RECORDAMOS: Conjugar una matriz A por otra invertible Q (i.e. A →Q−1AQ), equivale a realizar un cambio de base; vease el APENDICE 1.
4 LUIS HERNANDEZ LAMONEDA
1.4 EIGENVECTORES Y EIGENVALORES.
DEFINICION. A matriz de n × n, λ un escalar (en R o C); decimos que λ esun eigenvalor de A si existe un vector v 6= 0 tal que Av = λv.
Otra forma de decir lo anterior.
λ es un eigenvalor ⇐⇒ existe v 6= 0 tal que (A− λI)v = 0 ⇐⇒ Ker(A− λI) 6= 0⇐⇒ det(A−λI) = 0. A v se le llama un eigenvector asociado a λ y al polinomioφ(λ) = det(A− λI) se le llama el polinomio caracterıstico de A.
TEOREMA. A es diagonalizable ⇐⇒ existe una base U = {u1, u2, . . . , un}donde cada ui es un eigenvector de A.
Demostracion.
⇒) A diagonalizable ⇒ existe Q tal que Q−1AQ = D =
λ1
. . .
λn
⇒ si
qj es la j-esima columna de Q tenemos,
Aqj =
Q
λ1
. . .
λn
j
= λjqj
y por lo tanto {q1, q2, . . . , qn} es una base de eigenvectores.
⇐) Si U = {u1, u2, . . . , un} es una base de eigenvectores, entonces sea Q =(u1 · · ·un) ⇒ Q−1AQ = diagonal. �
LEMA. Si λ1, . . . , λr son eigenvalores de A todos distintos entre sı y v1, . . . , vr
eigenvectores asociados a cada λj respectivamente; entonces {v1, . . . , vr} es un con-junto linealmente independiente.
Demostracion. Por induccion sobre r = numero de eigenvalores distintos. Si r = 1entonces v1 6= 0 por definicion y por lo tanto {v1} es linealmente independiente.
Supongamos cierto para r = k ≥ 1 y supongamos que λ1, . . . , λk+1 son eigenval-ores distintos de alguna matriz A y que v1, . . . , vk+1 son eigenvectores asociados aestos. Entonces, si c1, . . . , ck+1 ∈ R son tales que
k+1∑
i=1
civi = 0, (1)
multiplicando por A ambos lados de la ecuacion obtenemos:
k+1∑
i=1
ciλivi = 0; (2)

TALLER DE ALGEBRA LINEAL 5
ademas multiplicando (1) por λk+1 nos da
k+1∑
i=1
ciλk+1vi = 0. (3)
Por lo tanto, tomando (2) menos (3) llegamos a la ecuacion
c1(λ1 − λk+1)v1 + . . .+ ck(λk − λk+1)vk = 0;
como cada λi − λk+1 6= 0 la hipotesis de induccion implica que c1 = · · · = ck = 0,luego (1) se reduce a ck+1vk+1 = 0 y por lo tanto tambien ck+1 = 0 �
COROLARIO. Si A, matriz de n× n, tiene n eigenvalores distintos entonces Aes dia- gonalizable.
EJEMPLO. A =
2/5 1/5 1/51/10 7/10 1/51/2 1/10 3/5
. Busquemos los eigenvalores de A;
estos son las raıces del polinomio (caracterıstico) p(λ) = det(A− λI).
p(λ) =
∣
∣
∣
∣
∣
∣
2/5 − λ 1/5 1/51/10 7/10 − λ 1/51/2 1/10 3/5 − λ
∣
∣
∣
∣
∣
∣
=
(
2
5− λ
)[(
7
10− λ
)(
3
5− λ
)
− 1
50
]
− 1
5
[
1
10
(
3
5− λ
)
− 1
10
]
+1
5
[
1
100− 1
2
(
7
10− λ
)]
= −λ3 +17
10λ2 − 4
5λ+
1
10
= − (λ− 1)
(
λ− 1
2
)(
λ− 1
5
)
.
Los eigenvalores son λ1 = 1, λ2 = 1/2 y λ3 = 1/5; como los tres son distintosconcluimos que A es diagonalizable.
Encontremos ahora eigenvectores asociados a λ1, λ2 y λ3, esto significa encontrar,para cada j, una solucion no trivial a la ecuacion (A− λjI)v = 0. Para λ1 = 1,
−3/5 1/5 1/51/10 −3/10 1/51/2 1/10 −2/5
∼
−3 1 11 −3 25 1 −4
∼
−3 1 10 −8 70 16 −14
∼
−3 1 10 −8 70 0 0
∼
−3 15
70
0 −8 70 0 0
∼
7 −5 00 8 −70 0 0
ası que una solucion no trivial al sistema (y por ende un eigenvector asociado a 1)es, por ejemplo, v1 = (5, 7, 8). Se procede de la misma manera para los otros dos

6 LUIS HERNANDEZ LAMONEDA
eigenvalores y se encuentran, por ejemplo, los siguientes eigenvectores asociados:v2 = (0, 1,−1) y v3 = (3, 1,−4).
De la discusion que hemos tenido en esta seccion deducimos que si
Q =
5 0 37 1 18 −1 −4
,
esto es, la matriz de eigenvectores; entonces Q−1 existe y
A = Q
1 0 00 1
20
0 0 1
5
Q−1
SOLUCION DEL PROBLEMA. Podemos ahora resolver los problemas plantea-dos al inicio de §1. Para esto calculemos primero la matriz Q−1; en el ejemploincluido en el APENDICE 2 viene hecho este calculo, la matriz que se obtiene esla siguiente
Q−1 =
1
20
1
20
1
20
−3
5
11
15− 4
15
1
4− 1
12− 1
12
.
Por lo tanto,
An =
5 0 37 1 18 −1 −4
1 0 00 1
2n 0
0 0 1
5n
1
20
1
20
1
20
−3
5
11
15− 4
151
4− 1
12− 1
12
,
y en particular
A4 =
5 0 37 1 18 −1 −4
1 0 00 1
160
0 0 1
625
1
20
1
20
1
20
−3
5
11
15− 4
151
4− 1
12− 1
12
=
157
625
156
625
156
625
3129
10000
3957
10000
833
2500
4359
10000
3547
10000
1043
2500
.
Finalmente
A4
1
31
31
3
=
(
469
1875,
5209
15000,2013
5000
)t
≈ (.250133, .347267, .4026)t
(t significa transponer) con lo que se ve que las Chivas tendran, mas o menos, un40% de probabilidades de ganarle al America.

TALLER DE ALGEBRA LINEAL 7
En cuanto a la tendencia que existira para n grande, si denotamos por D =
1 0 00 1
20
0 0 1
5
, entonces
limn→∞
An
1
31
31
3
= limn→∞
QDnQ−1
1
31
31
3
= Q(
limn→∞
Dn)
Q−1
1
31
31
3
= Q
1 0 00 0 00 0 0
Q−1
1
31
31
3
=
1
4
1
4
1
4
7
20
7
20
7
20
2
5
2
5
2
5
1
3
1
3
1
3
=
1
4
7
20
2
5
.
A la larga las Chivas tenderan a perder un 25% de sus juegos, a empatar un 35%de ellos y a ganar en un 40% de las ocasiones.
NOTA CON RESPECTO A SUCESIONES DE MATRICES. Si {Ak}es una sucesion de matrices de n×m para comprender que significa limAk, pienseseen cada matriz como un elemento de Rnm (i.e. estiren la matriz para formar unvector) y la sucesion como una sucesion de vectores. Por lo tanto convergenciasignifica convergencia en cada una de las entradas.
OBSERVACION. si (p, e, g) es tal que p + e + g = 1 (en particular si es de
probabilidad) entonces limn→∞ An
peg
=
1
47
202
5
.
Otra forma de ver esto: si w = rv1 + sv2 + tv3 es un vector de probabili-dad, entonces Anw = rλn
1v1 + sλn2v2 + tλn
3 v3 = rv1 + s2n v2 + t
5n v3; por lo tanto,limn→∞ Anw = rv1 y como w es de probabilidad entonces limn→∞Anw tambienlo es (ver EJERCICIOS), i.e. rv1 es de probabilidad, por lo tanto no queda masopcion que rv1 = (1/4, 7/20, 2/5).
Terminamos esta primera seccion con un teorema de punto fijo para matricesestocasticas.
TEOREMA. 1 es siempre un eigenvalor de cualquier matriz estocastica A.
Demostracion. Sea B = At, la matriz transpuesta de A; A y B tienen los mismoseigenva- lores ( sus polinomios caracterısticos son identicos), luego basta con probarla afirmacion para B.
Sea u = (1, 1, . . . , 1) entonces Bu = u ya que las entradas de cada uno de losrenglones de B suman 1. Pero esto dice que 1 es eigenvalor de B �
EJERCICIOS.

8 LUIS HERNANDEZ LAMONEDA
1. A matriz estocastica, v vector de probabilidad ⇒ Av es de probabilidad.Prueba tambien que si limAn = C entonces Cv es de probabilidad.
2. Si A es una matriz estocastica entonces Ak tambien lo es.
3. Sea v un vector de probabilidad que es tambien un eigenvector de la matrizestocastica A, Av = λv. Prueba que λ = 1.
4. Prueba que si v = (v1, v2, . . . , vn) es un eigenvector de la matriz estocasticaA asociado a un eigenvalor λ 6= 1, entonces
∑n
i=1vi = 0.
5. Sea A una matriz estocastica y λ un eigenvalor (real o complejo) de A. Pruebaque |λ| ≤ 1. (Sugerencia: considera la matriz B = At)
6. i. A =
(
0 11 0
)
es estocastica; prueba que limn→∞ An no existe.
ii. B =
(
1 1/20 1/2
)
tambien es estocastica; ¿que puedes decir de limn→∞Bn?
7. Prueba que si A es estocastica, diagonalizable y los eigenvalores de A sontodos 1 o estrictamente menores que 1 en valor absoluto (i.e. λ = 1 o |λ| < 1),entonces limn→∞ An existe.
8.
DEFINICION. Una matriz estocastica A se dice que es regular si existe m > 0tal que Am tiene todas sus entradas positivas.
Prueba que si A es estocastica regular entonces limn→∞ An existe y es igual ala matriz cuyas columnas son todas iguales al unico vector de probabilidad que eseigenvector. (Esto generaliza el ejemplo visto en las notas)
9. En 1990 una investigacion municipal del uso de la tierra mostro que el 10%de la tierra del municipio era urbana, el 50% no estaba utilizada y el 40% estabadestinada a usos agrıcolas.
Cinco anos despues una investigacion de actualizacion revelo que el 70% de la su-perficie urbana habıa permanecido urbana, 10% se habıa convertido en no utilizaday el 20% se habıa transformado en superficie agrıcola. De la misma manera, el 20%de la superficie no utilizada se habıa convertido en urbana, 60% habıa permanecidono utilizada y 20% se habıa convertido en superficie agrıcola. Finalmente, la inves-tigacion de 1995 mostro que el 20% de la superficie agrıcola se habıa convertido enno utilizada, mientras que el 80% permanecio agrıcola.
Suponiendo que las tendencias indicadas por la investigacion de 1995 contin-uaran, calcula los porcentajes de las superficies urbanas, no utilizadas y agrıcolasen el municipio para el ano 2000 y 2010 y los porcentajes eventuales correspondi-

TALLER DE ALGEBRA LINEAL 9
entes.
10. UN LIMITE IMPORTANTE. Si A es una matriz de n×n con entradasreales o complejas, se define eA = limk→∞Bk, donde
Bk = I + A+A2
2!+A3
3!+ · · · + Ak
k!.
Esto es, eA puede pensarse como la serie I +A+ A2
2!+ A3
3!+ · · · .
i. Prueba que para toda A, eA existe, i.e. prueba que la serie converge.
ii. Calcula e0 y eI donde 0 e I son la matriz cero y la identidad respectivamente.
iii. Prueba que eQAQ−1
= QeAQ−1.
iv. Encuentra A,B matrices de 2×2 con entradas reales tales que eAeB 6= eA+B .
v. Si A =
(
a −bb a
)
con a, b ∈ R, calcula eA.
§2.SEGUNDO PROBLEMA: FORMAS CUADRATICAS.
2.1 DEFINICIONES Y EJEMPLOS.
DEFINICION. Una cuadrica es una superficie (hipersuperficie, para ser exac-tos) de la forma S = {(x1, x2, . . . , xn) ∈ Rn | q(x1, . . . , xn) = c} donde q es unaforma cuadratica en las variables x1, . . . , xn (i.e. q(x1, . . . , xn) = a11x
21 + a22x
22 +
· · ·+ annx2n + a12x1x2 + a21x2x1 + a13x1x3 + · · · ) y c es una constante real.
EJEMPLOS
n = 2 : En este caso resultan ser conicas, estan dadas por una ecuacion dela forma a11x
21 + a22x
22 + a12x1x2 + a21x2x1 = c. Por ejemplo, las elipses y las
hiperbolas son cuadricas en 2 variables; ¿existiran otras en R2?
n = 3 : En este caso la forma general de una forma cuadratica es
q(x) = a11x21+a22x
22+a33x
23+a12x1x2+a21x2x1+a13x1x3+a31x3x1+a23x2x3+a32x3x2;
por ejemplo, el elipsoide 2x21 + 3x2
2 + 5x23 = 1 es una cuadrica en R
3.
OJO: Si A = (aij) entonces q(x1, . . . , xn) = xtAx con x =
x1
...xn
. Mas aun,
podemos siempre suponer que la matriz A es simetrica, A = At, ya que podemos

10 LUIS HERNANDEZ LAMONEDA
reemplazar aij y aji por a′ij = a′ji =aij+aji
2; con esto q(x) = xtA′x y A′ es
simetrica.
EJEMPLO. Si q(x1, x2, x3) = x21 + 3x2
3 + 2x1x2 − x1x3 entonces
q(x1, x2, x3) = (x1, x2, x3)
1 1 −1
2
1 0 0−1
20 3
x1
x2
x3
.
PREGUNTA: ¿Que tipo de superficie crees que es x21 + 3x2
3 + 2x1x2 − x1x3 = 1?
De ahora en adelante supondremos que toda forma cuadratica q esta dada poruna matriz simetrica A.
LEMA. Si q(x) = xtAx = xtBx para toda x ∈ Rn y ambas, A y B, son simetricas,entonces A = B. Esto es, toda forma cuadratica esta dada por una y solo unamatriz simetrica.
Demostracion. Sean x y y cualesquiera dos vectores en Rn, de (x+ y)tA(x+ y) =(x+ y)tB(x+ y) obtenemos xtAy+ ytAx = xtBy+ ytBx. Notese que, como ytAxes un numero real, es igual a su transpuesta: ytAx = (ytAx)t = xtAty = xtAy. Porlo tanto, la primera ecuacion es equivalente a xtAy = xtBy para toda x, y ∈ Rn.
Tomemos x = ei y y = ej , entonces
aij = etiAej = et
iBej = bij
se cumple para toda i, j, por lo tanto A = B. �
EJERCICIOS
1. Prueba que si A es una matriz de n × m y B es otra de m × p entonces(AB)t = BtAt.
2. Dibuja, valiendote de MATLAB, algunas conicas y algunas cuadricas enR3. Empieza con las siguientes y experimenta cambiando coeficientes, signos decoeficientes o el termino independiente.
i. x2 ±xy± y2 = 1, x2 ±xy± y2 = 0, x2 ±xy± y2 = −1, x2 ±xy± 2y2 = 1, etc.
ii. x2 ± y2 ± z2 = 1, x2 ± xy ± y2 ± yz ± z2 = 1, x2 = 1, x2 − y2 = 1,2x2
1 + 3x22 + 5x2
3 = 1, etc.
Si queremos clasificar las formas cuadraticas, lo primero que tendremos que de-cidir es cuando dos de ellas son equivalentes. Tendremos dos nociones (y por lo tantodos clasificaciones), una mas fina que la otra, pero ambas utiles y complementarias.

TALLER DE ALGEBRA LINEAL 11
§2.2 1a NOCION DE EQUIVALENCIA: CONGRUENCIA.
Dos formas cuadraticas, en Rn, p y q son congruentes si puedo pasar de una a la
otra mediante un cambio (lineal) de variables; i.e. pc∼q si y solo si existe G ∈ GLn
tal que si y = Gx ⇒ p(x) = q(y). Esto nos dice que, si p(x) = xtAx y q(y) = ytByentonces
xtAx = p(x) = q(y) = q(Gx) = (Gx)tB(Gx) = xtGtBGx
para toda x; por el LEMA de la seccion anterior esto sucede unicamente si A =GtBG.
DEFINICION. Dos matrices de n×n A y B son congruentes si existe G ∈ GLn
tal que A = GtBG.
En otras palabras, dos formas cuadraticas p(x) = xtAx y q(y) = ytBy soncongruentes si y solo si A y B son matrices congruentes.
EJERCICIO
i. Prueba que la congruencia de matrices es una relacion de equivalencia; esto es,prueba
a. Ac∼A.
b. Ac∼B ⇒ B
c∼A.
c. Si Ac∼B y B
c∼C ⇒ Ac∼C.
ii. Prueba que si Ac∼B y A es simetrica ⇒ B es simetrica.
iii. Si Ac∼B ⇒ el rango de A y el de B son iguales.
iv. Da un ejemplo de dos matrices de 2 × 2 del mismo rango pero que no seancongruentes.
EJEMPLO. q(x1, x2) = x21 + 2x1x2 + 2x2. La matriz simetrica asociada a q es
A =
(
1 11 2
)
, i.e.
q(x1, x2) = (x1, x2)
(
1 11 2
)(
x1
x2
)
.
La forma q se puede factorizar de la siguiente manera,
q(x1, x2) = x21 + 2x1x2 + 2x2 = (x1 + x2)
2 + x22.
Pongamos y1 = x1 + x2 y y2 = x2, entonces sustituyendo este cambio de variablellegamos a la forma cuadratica p(y1, y2) = y2
1 + y22 . Este cambio de variable esta
12 LUIS HERNANDEZ LAMONEDA
dado por la matriz G =
(
1 10 1
)
,
(
y1y2
)
=
(
1 10 1
)(
x1
x2
)
,
y
A =
(
1 11 2
)
=
(
1 01 1
)(
1 00 1
)(
1 10 1
)
= GtBG.
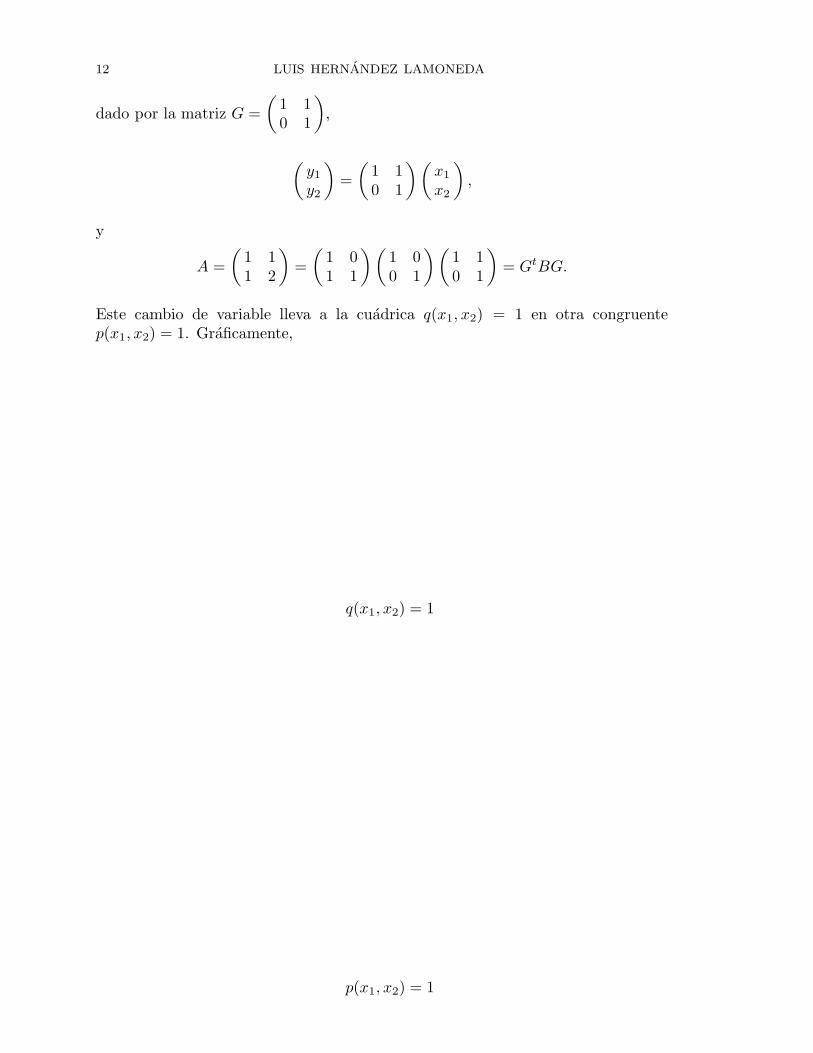
Este cambio de variable lleva a la cuadrica q(x1, x2) = 1 en otra congruentep(x1, x2) = 1. Graficamente,
q(x1, x2) = 1
p(x1, x2) = 1
TALLER DE ALGEBRA LINEAL 13
Es claro que bajo el cambio de variables (x1, x2) → (y1, y2) la forma cuadratica(y la cuadrica) se simplifica; tambien es claro que aunque algo de informacion sepierde (existe una distorsion evidente) ciertas propiedades se conservan (como elhecho de que la cuadrica sea una elipse), propiedades que ademas son mas facilesde leer de p que de q. Quisieramos comprender que simplificacion existe en el casogeneral, que propiedades se conservan y cuales otras se pierden; esta sera la metaprincipal en lo que resta de estas notas.
§2.3 2a NOCION DE EQUIVALENCIA: MOVIMIENTOS RIGIDOS.
En esta seccion exploraremos como simplificar una forma cuadratica (i.e. en-contrar una forma canonica para ella) mediante un movimiento rıgido, esto es,mediante una transformacion que preserve distancias.
DEFINICION. Sea Q una matriz de n × n real. Decimos que Q es ortogonal
si la transformacion de Rn dada por x→ Qx, preserva distancias. Esto es, si parax, y ∈ R
n cualesquiera, ‖Qx−Qy‖ = ‖x− y‖.
Esta definicion puede simplificarse un poco; observese que como Qx − Qy =Q(x − y), para que Q sea ortogonal basta con pedir que ‖Qx‖ = ‖x‖ para todovector x ∈ Rn.
RECORDEMOS: Dados x, y ∈ Rn, x = (x1, . . . , xn), y = (y1, . . . , yn) sedefine
i. x · y =∑n
i=1xiyi.
ii. ‖x‖ =√x · x =
√∑n
i=1x2
i .
Si Q es ortogonal tenemos que para cualesquiera x, y ∈ Rn
Q(x+ y) ·Q(x+ y) = (x+ y) · (x+ y) = x · x+ 2x · y + y · y
mientras que por otro lado
Q(x+ y) ·Q(x+ y) = (Qx+Qy) · (Qx+Qy) = Qx ·Qx+ 2Qx ·Qy +Qy ·Qy
de donde se sigue que una matriz ortogonal Q puede caracterizarse por la siguientepropiedad:
Qx ·Qy = x · y ∀x, y ∈ Rn.
En particular, Qei · Qej = δij para toda i, j : 1, . . . , n, i.e. las columnas de Qforman una base ortonormal de vectores en R
n.
EJERCICIO. Prueba el recıproco de la afirmacion anterior; i.e., prueba quedada una matriz A cuyas columnas son ortonormales entonces A es una matrizortogonal.

14 LUIS HERNANDEZ LAMONEDA
Recordemos que si A es cualquier matriz de n × n, y x, y ∈ Rn arbitrarios ⇒
Ax · y = ytAx. Como ytAx ∈ R ⇒ ytAx = (ytAx)t = xtAty, lo cual dice que
Ax · y = Aty · x = x ·Aty.
Aplicando esta observacion a una matriz ortogonal Q obtenemos
δij = Qej ·Qei = ej ·QtQei
y por lo tanto, ∀ i,
QtQei =n∑
j=1
δijej = ei,
i.e. QtQ = I (esto tambien se podıa haber deducido de que las columnas de Q seanortonormales). De esto y el EJERCICIO anterior se puede hacer la siguiente
CONCLUSION. Q es ortogonal ⇐⇒ QtQ = I ⇐⇒ Q−1 = Qt.
DEFINICION. Dos formas cuadraticas q y p en Rn son rıgidamente equiv-
alentes si existe un cambio de variables ortogonal que transforma una en la otra.Esto es, si existe Q ortogonal tal que q(x) = p(Qx).
Dos matrices A y B de n × n reales son rıgidamente equivalentes si existe Qortogonal tal que A = QtBQ.
OBSERVACIONES. i. Si A y B son las matrices simetricas asociadas a lasformas cuadraticas q y p respectivamente, entonces q y p son rıgidamente equiva-lentes si y solo si A y B lo son.
ii. Si A y B son rıgidamente equivalentes entonces tambien son semejantes.
EJEMPLO. Clasifiquemos las formas cuadraticas en dos variables bajo estanocion de equivalencia. La forma cuadratica general tiene la forma
q(x1, x2) = ax21 + 2bx1x2 + cx2
2 = (x1 x2 )
(
a bb c
)(
x1
x2
)
.
PASO 1.
(
a bb c
)
es diagonalizable y sus eigenvalores son reales.
El polinomio caracterıstico de esta matriz es φ(λ) = (a − λ)(c − λ) − b2 =λ2 − (a+ c)λ+ ac− b2.
EJERCICIO Dada una matriz de 2× 2 cualquiera A, prueba que su polinomiocaracterıstico es φ(λ) = λ2 − (trA)λ+ detA.

TALLER DE ALGEBRA LINEAL 15
Continuando con el PASO 1, resolvemos φ(λ) = 0 y encontramos que
λ =a+ c±
√
(a− c)2 + 4b2
2,
por lo tanto φ tiene dos raıces reales distintas a menos que a = c y b = 0, pero
en ese caso ¡la matriz es ya diagonal! Concluimos que A =
(
a bb c
)
siempre es
diagonalizable y con eigenvalores reales.
PASO 2. Si λ1 6= λ2 son los dos eigenvalores y v1, v2 eigenvectores asociados aellos ⇒ v1 ⊥ v2.
Bajo el supuesto que ambos eigenvalores son distintos, uno de ellos debe serdistinto de cero; supongamos que λ1 6= 0. Entonces,
v1 · v2 =1
λ1
Av1 · v2 =1
λ1
v1 ·Atv2 =λ2
λ1
v1 · v2
y por lo tanto, v1 · v2 = 0.
PASO 3. A siempre tiene dos eigenvectores v1, v2 tales que {v1, v2} es una baseortonormal.
Si A es diagonal entonces {e1, e2} satisface lo requerido. Si A no es diagonalentonces λ1 6= λ2 y por el PASO 2 existen eigenvectores v1 y v2 perpendiculares,dividiendo cada uno entre su norma obtenemos la base ortonormal de eigenvectores.
PASO 4. Existe Q ortogonal tal que QtAQ =
(
λ1 00 λ2
)
.
Simplemente tomamos Q cuyas columnas son los eigenvectores ortonormales delPASO 3.
Ası hemos probado que cualquier forma cuadratica en dos variables es rıgidamenteequivalente a una de la forma h(x1, x2) = λ1x
21 + λ2x
22. Es facil ahora caracterizar
las formas cuadraticas en R2:
TEOREMA. Dos formas cuadraticas en R2 son rıgidamente equivalentes si y
solo si sus matrices asociadas tienen los mismos eigenvalores.
Demostracion. Sean q(x, y) = ax2 + 2bxy+ cy2 y q′(x, y) = a′x2 + 2b′xy+ c′y2 dosformas en R2; sus matrices simetricas asociadas son
A =
(
a bb c
)
y A′ =
(
a′ b′
b′ c′
)
.
16 LUIS HERNANDEZ LAMONEDA
Si ambas son rıgidamente equivalentes, en particular A y A′ son semejantes y por lotanto tienen los mismos eigenvalores. Recıprocamente, si estas dos matrices tienenlos mismos eigenvalores quiere decir que existen matrices ortogonales Q y Q′ que
las conjugan a
(
λ1 00 λ2
)
o
(
λ2 00 λ1
)
. Por lo tanto para completar la prueba
nos basta comprobar que las matrices
(
λ1 00 λ2
)
y
(
λ2 00 λ1
)
son rigidamente
equivalentes; pero(
λ1 00 λ2
)
=
(
0 −11 0
)(
λ2 00 λ1
)(
0 1−1 0
)
�
EJERCICIO. Cualquier cuadrica en dos variables ax2 + 2bxy + cy2 = k puedetransformarse mediante una rotacion en una de la forma λ1x
2 +λ2y2 = k. Ademas
podemos llevar la cuadrica ax2 + 2bxy + cy2 = k en otra a′x2 + 2b′xy + c′y2 =k mediante una rotacion si y solo si las matrices simetricas asociadas a ambascuadricas tienen los mismos eigenvalores.
En el Apendice 3 se pueden encontrar las demostraciones de los resultados nece-sarios para generalizar el TEOREMA anterior para formas cuadraticas en n vari-ables. Dejamos al lector la tarea de completar la demostracion de este resultado.
TEOREMA. Toda forma cuadratica q en Rn es rıgidamente equivalente a una
de la forma h(x1, x2, . . . , xn) = λ1x21 + λ2x
22 + . . . + λnx
2n, en donde las lj’s son
los eigenvalores de la matriz simetrica asociada a q. Dos formas cuadraticas en Rn
son rıgidamente equivalentes si y solo si sus matrices asociadas tienen exactamentelos mismos eigenvalores (contando multiplicidades).
§2.4 EL INDICE DE UNA MATRIZ SIMETRICA Y EL TEOREMA DE
SILVESTRE. En esta ultima seccion retomamos la discusion comenzada en §2.2y daremos al termino una clasificacion de formas cuadraticas modulo congruencia.Comenzamos con una definicion que nos sera muy util en nuestro analisis.
DEFINICION. El ındice de una matriz simetrica A es igual al numero de eigen-valores positivos de A; denotamos al ındice de A por IndA. Si q(x) = xtAx es unaforma cuadratica, el ındice y el rango de q son por definicion el ındice y el rangode la matriz A.
Sabemos que si p(x) = xtBx y q(x) = xtAx son dos formas cuadraticas con-gruentes (i.e. existe G ∈ GLn tal que A = GtBG) entonces sus rangos coinciden.Probaremos en un momento que sus ındices tambien coincidiran; este es el contenidodel Teorema de Silvestre.
TEOREMA DE SILVESTRE. Si A y B son dos matrices simetricas reales
tales que Ac∼B, entonces IndA = IndB.

TALLER DE ALGEBRA LINEAL 17
Demostracion. En el Apendice 3 esta probado que toda matriz simetrica es diago-
nalizable mediante una matriz ortogonal; esto en particular nos implica que Ac∼D1
y Bc∼D2 donde D1 y D2 son ambas matrices diagonales. Por transitividad de la
relacion dada por congruencia sabemos que D1
c∼D2. Ya que D1 y D2 tienen losmismos eigenvalores que A y B respectivamente, podemos suponer sin mas tramiteque A y B son ambas diagonales.
Sea q(x) = xtAx; si A tiene k eigenvalores positivos y el rango de A es r entoncesq tiene la forma
q(x) = a1x21 + . . .+ akx
2k − ak+1x
2k+1 − . . .− arx
2r
en donde toda aj > 0. El subespacio W+ = {x ∈ Rn | xk+1 = · · · = xr = 0} ⊂ Rn
tiene dimension n− r+ k y tiene la propiedad de que q(w) > 0 para todo w 6= 0 enW+.
Como A y B son congruentes, sabemos que A = GtBG para alguna matrizinvertible G. Sea y = Gx y l el numero de eigenvalores positivos de B; podemosentonces escribir q de la siguiente manera
q(x) = b1y21 + . . .+ bly
2l − bl+1y
2l+1 − . . .− bry
2r
con bj > 0 para toda j.
Sean u1, u2, . . . , un las columnas de U = G−1, estas forman una base de Rn yx = y1u1 + · · · + ynun. Definimos W− como el subespacio de Rn generado por{ul+1, . . . , ur}; la dimension de W− es r − l y q(x) < 0 para toda 0 6= x ∈W−.
De lo anterior se sigue que W+⋂
W− = {0} y por lo tanto que la suma de susdimensiones no puede exceder a n, i.e. n ≥ (n − r + k) + (r − l) = n + k − l ⇒l ≥ k. Intercambiando los papeles de A y B vemos que tambien l ≤ k. �
Sea entonces, q(x) = xtAx una forma cuadratica cualquiera en n variables, deındice k y rango r. Podemos encontrar una matriz ortogonal Q tal que
QtAQ = D = diag(λ1, λ2, . . . , λr, 0, . . . , 0)
es diagonal, λ1, . . . , λk son positivos y λk+1, . . . , λr son negativos (este orden sepuede conseguir permutando las columnas de Q como sea necesario). Definimosuna matriz diagonal Λ de la siguiente manera
Λ = diag
(
1√λ1
, . . . ,1√λk
,1
√
−λk+1
, . . . ,1√−λr
, 1, . . . , 1
)
.
Si definimos D(k, r) como la matriz (de n× n) diagonal cuyas primeras k entradasdiagonales son 1, las siguientes r − k son -1 y las restantes 0, entonces ΛtDΛ =ΛDΛ = DΛ2 = D(k, r); por lo tanto, si ponemos G = QΛ ∈ GLn tendremos queGtAG = D(k, r).

18 LUIS HERNANDEZ LAMONEDA
EJEMPLO Sea q(x1, x2, x3, x4) = 3(x21 + x2
2 + x23 + x2
4) + 2x1x2 − 10x1x3 +10x1x4 + 10x2x3 − 10x2x4 + 2x3x4, por lo que
A =
3 1 −5 51 3 5 −5−5 5 3 15 −5 1 3
cuyo polinomio caracterıstico es
φ(λ) = λ4−12λ3−48λ2+704λ−1536 = (λ−12)(λ−4)2(λ+8) (¡compruebenlo con MATLAB!);
ası que el ındice de A es 3 y su rango es 4. q es congruente con la forma
h(x1, x2, x3, x4) = x21 + x2
2 + x23 − x2
4.
Podemos resumir la informacion ganada en esta seccion en el siguiente resultado.
TEOREMA. Sean A y B matrices simetricas de n × n reales, y sean 0 ≤ k ≤r ≤ n.
1. A tiene ındice k y rango r si y solo si Ac∼D(k, r).
2. Ac∼B si y solo si tienen el mismo rango e ındice.
§2.5 CLASIFICACION DE CUADRICAS EN R3 MODULO CONGRU-
ENCIA. Cualquier forma cuadratica en R3 es congruente a una y solo una de las
siguientes:
1. x2 + y2 + z2 rango=3, Ind=3.
2. x2 + y2 − z2 rango=3, Ind=2.
3. x2 − y2 − z2 rango 3, Ind=1.
4. −x2 − y2 − z2 rango=3, Ind=0.
5. x2 + y2 rango=2, Ind=2.
6. x2 − y2 rango=2, Ind=1.
7. −x2 − y2 rango=2, Ind=0.
8. x2 rango=1, Ind=1.
9. −x2 rango=1, Ind=0.
10. 0 rango=0, Ind=0.

TALLER DE ALGEBRA LINEAL 19
Las cuadricas en R3 de la forma q(x) = 1 quedan clasificadas de la siguiente
manera:
1. x2 + y2 + z2 = 1, elipsoides.
2. x2 + y2 − z2 = 1, hiperboloides de una hoja.
3. x2 − y2 − z2 = 1, hiperboloides de dos hojas.
4. x2 + y2 = 1, cilindros elıpticos.
5. x2 − y2 = 1, cilindros hiperbolicos.
6. x2 = 1, dos planos paralelos.
7. −x2 − y2 − z2 = 1, −x2 − y2 = 1, −x2 = 1 el vacıo.
Aquellas de la forma q(x) = 0 se dividen en
1. x2 + y2 − z2 = 0, x2 − y2 − z2 = 0, conos elıpticos.
2. x2 − y2 = 0, dos planos que pasan por el orıgen.
3. x2 + y2 = 0, −x2 − y2 = 0, una recta por el orıgen.
4. ±x2 = 0, un plano por el orıgen.
5. x2 + y2 + z2 = 0, −x2 − y2 − z2 = 0, el orıgen.
Tenemos 5 tipos distintos de cuadricas de la forma q(x) = 0. Finalmente, com-binando estas dos tablas, concluimos que existen 12 distintas cuadricas (modulocongruencia) en R3.
EJERCICIOS
1. Considera la superficie 10x2 + 5y2 + 25z2 − 2xy − 10xz − 2yz = 1. Haz undibujo de ella usando MATLAB. (Sugerencia: si A es la matriz simetrica asociadaa esta cuadrica, encuentra G tal que GtAG = D(k, r). Suponiendo que sabesdibujar la cuadrica para D(k, r), lo cual es mas facil, puedes entonces aplicarlea este dibujo la transformacion G−1 que te dara la superficie que buscas). Algoun poco mas ambicioso es escribir un programa en MATLAB que dibuje cualquiercuadrica basado en esta idea.
2. Una forma cuadratica q(x) = xtAx en Rn (y la matriz A) es positiva si
q(x) > 0 siempre que x 6= 0. Prueba que q es positiva si y solo si todos loseigenvalores de A son positivos (si y solo si el ındice y el rango de A son iguales an).
3. Si S es la cuadrica dada por ax2 + by2 + cz2 + exy + fxz + gyz = 1, ¿esposible que teniendo alguno de a, b o c negativo S sea un elipsoide? Da un ejemplo

20 LUIS HERNANDEZ LAMONEDA
o prueba que es imposible.
APENDICES
§1 CAMBIO DE BASES
Dada una matriz cuadrada A = (aij) de n×n, definimos una transformacion lin-eal T : Rn → Rn como T (v) = Av; si escogemos ahora una base U = {u1, u2, . . . , un}de Rn entonces, para cada j existen n numeros reales bij tales que,
T (uj) =n∑
i=1
bijui;
ası que, con respecto a la base U la transformacion lineal T esta dada por T (x) = Bx
donde la j-esima columna de B, Bj = [Tuj ]U =
b1j
...bnj
.
¿Cual sera la relacion entre la matriz B (matriz de T con respecto a U) y A(matriz de T con respecto a la base canonica {ei})?
Necesitaremos una matriz mas: sea Q = (qij) tal que uj =∑n
i=1qijei. Q es la
matriz tal que Qej = uj para toda j. Calculemos,
T (uj) = T (∑
i
qijei) =∑
i
qijT (ei) =∑
i
qij
(
∑
k
akiek
)
=∑
i,k,l
qijakiplkul =∑
i,k,l
plkakiqijul
donde los plk’s estan dados por ek =∑n
l=1plkul.
EJERCICIO. Si Q = (qij) entonces Q−1 = P = (plk).
Por lo tanto concluimos que B = PAQ = Q−1AQ.
EJEMPLO. A =
(
−5 18−2 7
)
.
Entonces T : R2 → R2 esta dada por T (x, y) =
(
−5 18−2 7
)(
xy
)
= (−5x +
18y,−2x+ 7y); y sea U = {(3, 1), (2, 1)}.
Q =
(
3 21 1
)
y Q−1 =
(
1 −2−1 3
)
.

TALLER DE ALGEBRA LINEAL 21
RECORDEMOS: si
(
a bc d
)
es tal que ad− bc 6= 0 ⇒(
a bc d
)−1
=1
ad− bc
(
d −b−c a
)
.
T en la base U tiene como representacion matricial a la matriz
Q−1AQ =
(
1 −2−1 3
)(
−5 18−2 7
)(
3 21 1
)
=
(
1 20 1
)
i.e. T fija a u1 y manda a u2 en 2u1 + u2; este cambio de base nos ayuda acomprender visualmente como se comporta T .
§2 COMO CALCULAR LA INVERSA DE UNA MATRIZ
Dada una matriz de n × n, invertible Q = (qij) queremos encontrar Q−1; estoes, queremos encontrar una matriz de n×n B que satisfaga QB = I. Mirando unapor una las columnas de B, el problema se ve que es equivalente a resolver, paracada j : 1, . . . , n, el sistema
Q
b1j
b2j
...bnj
=
0...010...0
el 1 en la j-esima coordenada
para las incognitas b1j, . . . , bnj. Una manera de resolver este sistema es con-siderando la matriz aumentada
Q
0...010...0
=
q11 · · · q1n 0...
......
qj−11 · · · qj−1n 0qj1 · · · qjn 1qj+11 · · · qj+1n 0
......
...qn1 · · · qnn 0
y llevarla mediante operaciones elementales en sus renglones a la matriz aumentada
I
b1j
b2j
...bnj
=
1 0 · · · 0 b1j
0 1 0 b2j
.... . .
......
0 · · · 0 1 bnj
.
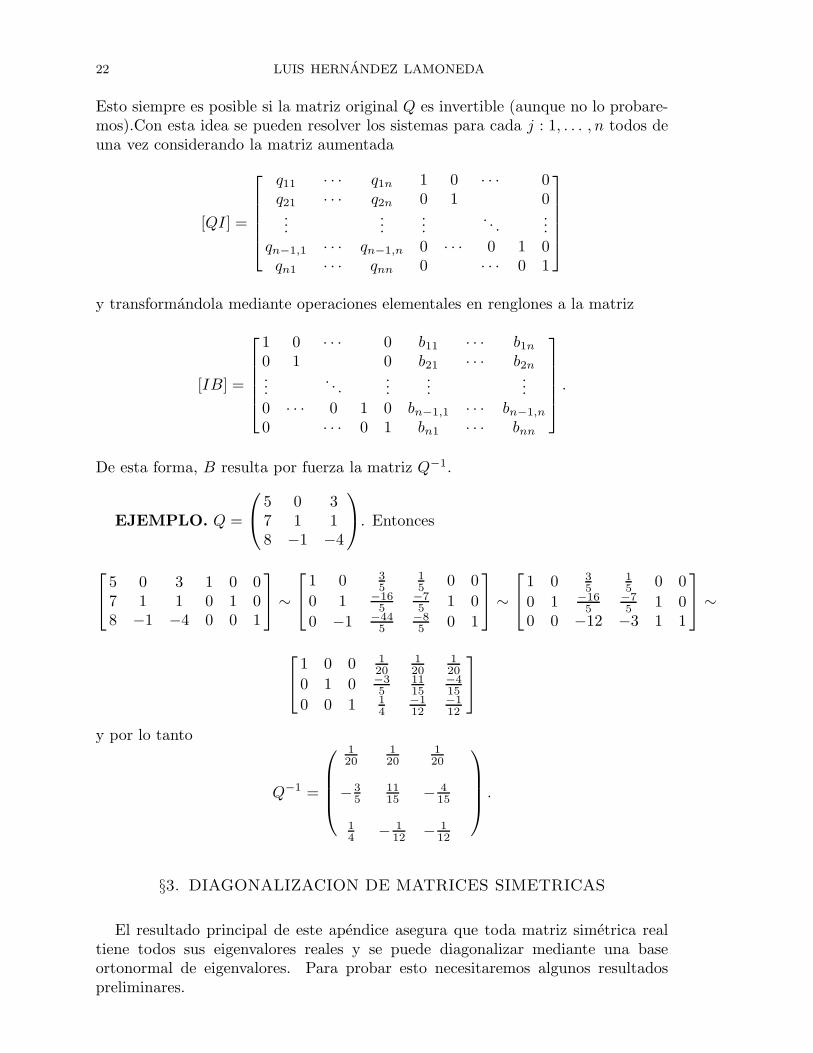
22 LUIS HERNANDEZ LAMONEDA
Esto siempre es posible si la matriz original Q es invertible (aunque no lo probare-mos).Con esta idea se pueden resolver los sistemas para cada j : 1, . . . , n todos deuna vez considerando la matriz aumentada
[QI] =
q11 · · · q1n 1 0 · · · 0q21 · · · q2n 0 1 0...
......
. . ....
qn−1,1 · · · qn−1,n 0 · · · 0 1 0qn1 · · · qnn 0 · · · 0 1
y transformandola mediante operaciones elementales en renglones a la matriz
[IB] =
1 0 · · · 0 b11 · · · b1n
0 1 0 b21 · · · b2n
.... . .
......
...0 · · · 0 1 0 bn−1,1 · · · bn−1,n
0 · · · 0 1 bn1 · · · bnn
.
De esta forma, B resulta por fuerza la matriz Q−1.
EJEMPLO. Q =
5 0 37 1 18 −1 −4
. Entonces
5 0 3 1 0 07 1 1 0 1 08 −1 −4 0 0 1
∼
1 0 3
5
1
50 0
0 1 −16
5
−7
51 0
0 −1 −44
5
−8
50 1
∼
1 0 3
5
1
50 0
0 1 −16
5
−7
51 0
0 0 −12 −3 1 1
∼
1 0 0 1
20
1
20
1
20
0 1 0 −3
5
11
15
−4
15
0 0 1 1
4
−1
12
−1
12
y por lo tanto
Q−1 =
1
20
1
20
1
20
−3
5
11
15− 4
15
1
4− 1
12− 1
12
.
§3. DIAGONALIZACION DE MATRICES SIMETRICAS
El resultado principal de este apendice asegura que toda matriz simetrica realtiene todos sus eigenvalores reales y se puede diagonalizar mediante una baseortonormal de eigenvalores. Para probar esto necesitaremos algunos resultadospreliminares.

TALLER DE ALGEBRA LINEAL 23
Consideremos Cn = {(z1, z2, . . . , zn) | zj ∈ C}; dados z = (z1, z2, . . . , zn) y
w = (w1, w2, . . . , wn) en Cn se define
〈z, w〉 =
n∑
j=1
zjwj ;
observese que 〈w, z〉 = 〈z, w〉. Sea B una matriz de n× n con entradas complejas.
DEFINICION. B∗ = Bt
Ahora,
〈Bz,w〉 = wtBz = (wtBz)t = ztBtw = 〈Btw, z〉 = 〈z, Btw〉,
es decir, 〈Bz,w〉 = 〈z, B∗w〉.
LEMA. A simetrica, real de n× n, si λ es un eigenvalor de A entonces λ ∈ R.
Demostracion. Sea v un eigenvector asociado a λ (v ∈ Cn). Observamos que comov = (v1, v2, . . . , vn) es distinto cero entonces 〈v, v〉 =
∑
j ‖vj‖2 > 0. Como ademas
λ〈v, v〉 = 〈Av, v〉 = 〈v, Av〉 = λ〈v, v〉
se sigue que λ ∈ R. �
TEOREMA. Sea M una matriz real con eigenvalores reales, entonces existe Qortogonal tal que QtMQ es triangular superior.
Recordamos que una matriz cuadrada T = (tij) es triangular superior si tij = 0siempre que i > j.
Demostracion. Por induccion en el tamano de M . Si M es de 1×1 no hay nada queprobar (todas las matrices de 1 × 1 son triangulares). Supongamos que el teoremaes cierto para toda matriz de (n−1)× (n−1) que satisfaga las hipotesis. TomemosM matriz de n× n con todos sus eigenvalores reales.
Sea λ un eigenvalor de M y v1 un eigenvector asociado a λ tal que v1 · v1 = 1.Completemos v1 a una base ortonormal de Rn {v1, v2, . . . , vn} (siempre puede unocompletar v1 a una base y luego a esta aplicarle el algoritmo de Gram-Schmidt paraortonormalizarla). Sea P1 la matriz cuyas columnas son v1, v2, . . . , vn; P1 es unamatriz ortogonal y
P t1MP1 =
λ x1 · · · xn−1
0 k11 · · · k1,n−1
......
...0 kn−1,1 · · · kn−1,n−1

24 LUIS HERNANDEZ LAMONEDA
para alguna matriz de (n − 1) × (n − 1), K = (kij). Si φ(t) es el polinomiocaracterıstico de K y ψ(t) el correspondiente polinomio de M entonces ψ(t) =(t− λ)φ(t) (¿por que?); y por lo tanto todos los eigenvalores de K son reales (puesson eigenvalores para M). Por hipotesis de induccion existe una matriz ortogonalR = (rij) de (n− 1) × (n− 1) tal que RtKR = T es triangular superior.
Ponemos P2 =
1 0 · · · 00 r11 · · · r1,n−1
......
...0 rn−1,1 · · · rn−1,n−1
⇒ P2 es ortogonal. SeaQ = P1P2.
Q es ortogonal y
QtMQ = P t2P
t1MP1P2 = P t
2
λ x1 · · · xn−1
0 k11 · · · k1,n−1
......
...0 kn−1,1 · · · kn−1,n−1
P2
=
1 0 · · · 00... Rt
0
λ x1 · · · xn−1
0... K0
1 0 · · · 00... R0
=
λ x1 · · · xn−1
0... RtK0
1 0 · · · 00... R0
=
λ y1 · · · yn−1
0... RtKR0
=
λ y1 · · · yn−1
0... T0
que es triangular superior �
COROLARIO. Si A es simetrica real, entonces existe Q ortogonal tal que QtAQes diagonal.
Demostracion. A tiene todos sus eigenvalores reales, por lo tanto existe una matrizortogonal Q tal que QtAQ = T es triangular superior. Ahora,
T t = (QtAQ)t = QtAtQ = QtAQ = T,
por lo tanto T es diagonal. �
EJERCICIO: Una desmostracion alternativa de que una matriz simetrica esdiagonalizable mediante una transformacion ortogonal. El ejercicio consiste enllenar los detalles del siguiente esbozo de demostracion.
i. Sea A simetrica de n× n y q(x) = xtAx. Sea h(x) = xtIx = x21 + · · ·+ x2
n, laesfera unidad en Rn es el conjunto S1 = h−1(1) = {x | x2
1 + · · ·+ x2n = 1}. S1 es un
TALLER DE ALGEBRA LINEAL 25
compacto en Rn y por lo tanto q alcanza su maximo al restringirse a este conjunto.
Sea v1 ∈ S1 un maximo de q.
ii. Calculamos los gradientes de q y de h: ∇h(x) = 2x y ∇q(x) = 2Ax para todax ∈ Rn.
iii. El teorema de multiplicadores de Lagrange implica en este caso que existeλ1 ∈ R tal que
∇q(v1) = λ1∇h(v1);
que es lo mismo que decir que v1 es un eigenvector de A asociado a λ1.
iv. Sea S2 = S1
⋂
v⊥1 . S2 es el ecuador ortogonal a v1. Repetimos el paso i. paraq restringida a S2; i.e. existe v2 ∈ S2 maximo de q en S2. Nuevamente podemosaplicar el teorema de multiplicadores de Lagrange, ahora tenemos dos restriccionesdadas por h(x) = 1 y u1(x) = 0, donde u1(x) = x · v1. Multiplicadores de Lagrangenos da la existencia de dos numeros reales λ2 y µ1 tales que
2Av2 = ∇q(v2) = λ2∇h(v2) + µ1∇u1(v2) = 2λ2v2 + µ1v1.
Como Av2 · v1 = v2 ·Av1 = λ1v2 · v1 = 0 tenemos que µ1 = 0 en la formula anteriory por lo tanto v2 es un eigenvector (ortogonal a v1) asociado a λ2.
v. Continuando de esta forma construimos un conjunto ortonormal de eigenvec-tores de A. �
BIBLIOGRAFIA
W. Keith Nicholson, Linear algebra with applications, Third Edition, PWS Pub-lishing Company, Boston, 1995.
S. H. Friedberg, A. J. Insel, L. E. Spence, Algebra lineal, Publicaciones Cultural,S.A., Mexico, 1982.
M. W. Hirsch, S. Smale, Differential equations, dynamical systems, and linear al-gebra, Academic Press, 1974.