sistemas de coordenadas en...
TRANSCRIPT
Sistemas de
Coordenadas
en Geodesia
SPP secretaría de programación y presupuesto
COORDINACION GENERAL DE LOS SERVICIOS NACIONALES DE ESTADISTICA. GEOGRAFIA E INFORMATICA
SISTEMAS DE COORDENADAS EN GEODESIA
por
E. J. Krakiwsky & D. E. Wells
Depto. de Ingeniería
Topográfica, U.N.B.
Fredericton, N. B,
Canadá, 1973
Traductor:
M, C. Rafael Sosa Torres
Dirección General de Geografía
del Territorio Nacional
México, D. F.
1978

NOTA DEL TRADUCTOR
Este trabajo es parte del esfuerzo que la Dirección General de Geografía del
Territorio Nacional, está realizando para la actualización y difusión de los conoci-
mientos geodésicos en nuestro país.
Se agradece profundamente la generosa colaboración de los autores Drs. E. J.
Krakiwsky y D. E. Wells, al permitir la traducción de su obra.
El apoyo brindado por los C. Jefes y compañeros del Departamento de Geode-
sia fue vital para que estas notas vieran la luz del día. Mención especial merecen la
Srita. Ma. Guadalupe López Montoya, por su excelente trabajo de mecanografía, y
los Sres. M. Agustín Ramírez Cruz y Jesús Vega Chávez, quienes realizaron el pacien-
te trabajo de escribir fórmulas y dibujar los diagramas que aparecen en el texto.
M. C. Rafael Sosa Torres
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Contenido
Pág.
Lista de IIdistracciones
Lista de Tablas
1. - Introducción ... 13
1.1.- Polos, Planos y ejes 16
1.2o- Tiempo Universal y Tiempo Sideral ............ 18 1.3.- Sistemas de coordenadas en Geodesia 19
2.- Sistemas de Coordenadas Terrestres 21
2.1.- Sistemas Terrestres geocéntricos 21
2.1.1.- Movimiento Polar y rotación irregular de la tierra 22
2.1.2.- Sistemas Terrestres promedio e ins- tantánea , ... ...» 24
2.1.3.- Sistemas Geodésicos 29
2.2.- Relación entre coordenadas cartesianas y curvilíneas 31
2.2.1.- Coordenadas cartesianas y curvilíneas de un punto sobre el Elipsoide de Referencia 31
2.2.2.- El vector de posición en término de la
latitud geodésica 34
2.2.3.- El vector de posición en términos de las latitudes Geocéntrica y Reducida 3&
2.2.4.- Relación entre las latitudes geodésica, geo-
céntrica y reducida 40
2.2.5.- El vector de posición de un punto por enci- ma del Elipsoide de Referencia 40
2.2.6.- Transformación de coordenadas cartesianas,
Terrestres promedio a Geodésicas 43
2.3.- Datums Geodésicos 46
2.3.1.- Parámetros de posición del Datum 49
2.3.2.- Establecimiento de un Datum 54 2.3.3.- El Datum Norte Americano 56
2.3.4.- Transformaciones de Datums 59
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Pag.
2.4.- Sistemas Topocéntricos Terrestres 62
2.4.1.- Sistema Astronómico Local 64
2.4.2.- Sistema Geodésico Local 68
2.5.- Sumario de Sistemas Terrestres 71
.3.- Sistemas de Coordenadas Celestres 75
3.1.- El sistema Eclíptico 77
3.2.- El sistema de Ascención Hecta 79 3. 3. - El sistema de Angulo Horario 81
3.4.- El sistema de Horizonte 85
3.5. - Variaciones del Sistema de Ascención Recta 87
3.5.1.- Precesión y Nutación 88 3.5.2.- Sistemas Celestes Medios 90 3.5.3.- El Sistema Celeste Verdadero. 95
3.5.4. - El Sistema del Lugar Aparente 97
3.5.5.- El Sistema del Lugar Observado, 98
3.6. - Transformación entre coordenadas del Sistema
Celeste Aparente y coordenadas del Sistema Te- rrestre Promedio ...... 99
3.7.- Sumario de Sistemas C elestes 101
4. - El Sistema de Coordenadas Orbitales 106
4.1. - La Elipse Orbital y las Anomalías Orbitales 106
4.2. - El Sistema de Coordenadas Orbitales. 110 4. 3. - Transformación del Sistema Orbital al Terrestre
Promedio 112 4.4.- Variaciones en los elementos orbitales 113
4.5. - El Sub-punto del Satélite 113 4.6.- Coordenadas Topocéntricas de un Satélite 115
5. - Sumario de Sistemas de Coordenadas 118
5.1.- Sistemas Terrestres 118
5.2.- Sistemas Celestes 120 5.3. - Paradoja de dualidad en los Sistemas Celestes
Aparente y Observado 121 5.4. - La conexión entre los Sistemas Orbital, Celeste
y Terrestre 122
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Pag.
Referencias 123
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
LISTA DE ILUSTRACIONES
Figura No. Titulo Pag.
1-1 Sistemas de Coordenadas Terrestres, Celestes y Orbitales 14
1-2 Tipos de Sistemas de Coordenadas 15
2-1 Movimiento Polar 23
2-2 Posición de un Punto que se Mueve Uniforme-
mente a lo largo del Ecuador menos la Posición sobre el Ecuador actual 25
2-3 Sistemas de Coordenadas Terrestres y Geodé-
sicas 26
2-4 Transformación del Sistema Instantáneo
al Terrestre Promedio. 28
2-5 Elipsoide de Referencia 32
2-6 Latitudes Diversas 35
2-7 Linea Tangente a la Elipse Meridiana 36
2-8 Punto por Encima del Elipsoide de Referencia 41
2-9 Sección Meridiana de la Tierra 47
2-10 Orientación del Elipsoide al Geoide 52
2-12 Sistemas de Coordenadas Geodésica y Geo-
désica Local. 65
2-13 Ecuaciones que relacionan los Sistemas Terres-
tres 73
3-1 Sistema de la Eclíptica .... 78
3-2 Sistema de la Ascención Recta 80
3-3 Sistema del Angulo Horario 82
3-4 Tiempo, Longitud y Ascención Recta 84
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
3-5 Sistema de Horizonte , . 86
3-6 Variaciones del Sistema de Ascención Recta Celeste 89
3-7 Movimiento del Polo Celeste 91
3-8 El Efecto de Nutación y Precesión 92
3-9 Sistemas de coordenadas celestes medias . . - 94
3-10 Sistemas de coordenada verdadero y celeste
me dio 96
3-11 Sistema de coordenada celeste 105
4-1 Elipse Orbital 107
4-2 Elementos Orbitales Keplerianos 111
4-3 Sub punto de un satélite *..... 114
4-4 Coordenadas Topocéntricas de un satélite.... 116
5-1 Sistemas de Coordenadas 119
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

LISTA DE TABLAS
Tabla No, Titulo Pag.
2-1 Parámetros que definen el Datum Norteamericano de 1927 58
2-2 Componentes de la Traslación 58
2-3 Ejemplo de Transformación de Datum 63
2-4 Polos de referencia, Planos y ejes que definen los sistemas de Coordenadas Terrestres.,.,,,.. 72
2-5 Transformaciones éntrelos sistemas de coorde- nadas 74
3-1 Polos de referencia, planos y ejes que definen los sistemas de coordenadas celestes 103
3-2 Transformaciones entre Sistemas de Coordena- das Celestes 104
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
1.- Intr o due c ión .
Estas notas discuten las definiciones precisas de, y
las transformaciones entre, los sistemas de coordenadas a - las cuales son referidas las coordenadas de una estación so -
bre o por encima de la superficie de la Tierra. Para defi -
nir un sistema de coordenadas, debemos especificar:
a). - La localización del origen.
b). - La orientación de los tres ejes.
c). - Los parámetros ( cartesianos,
curvilíneos ) que definen la po- sición de un punto referido al
Sistema de Coordenadas.
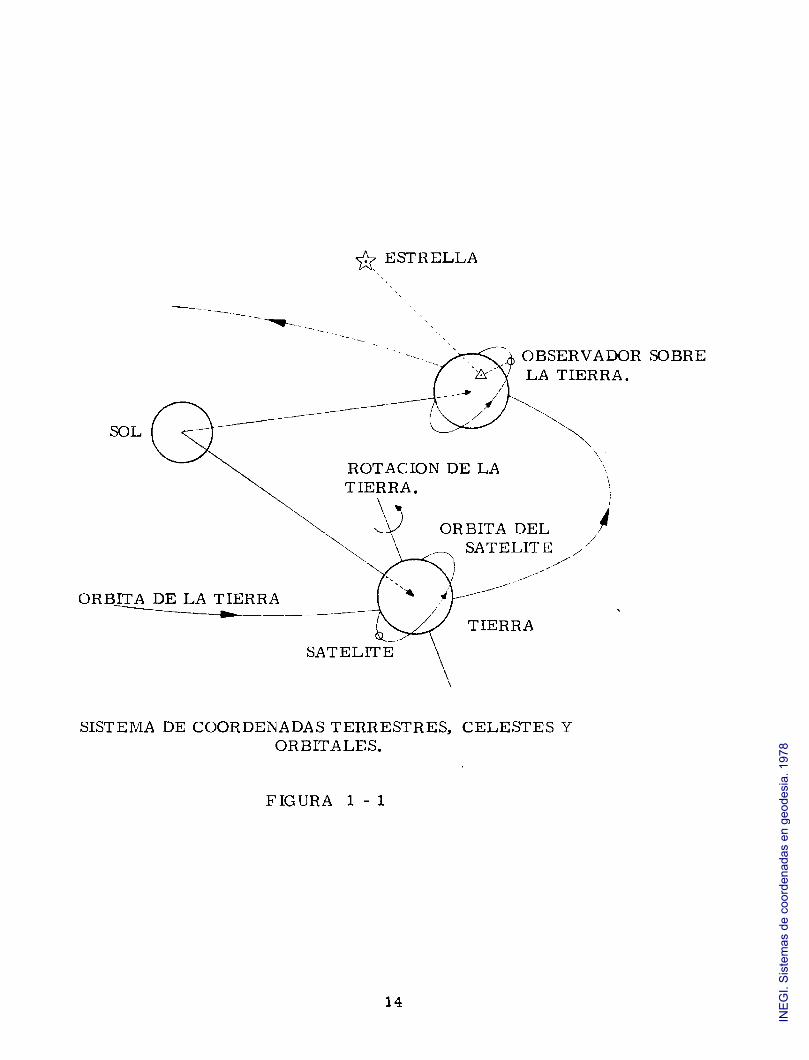
La tierra tiene dos movimientos periódicos diferen_ tes en el espacio: Gira sobre su eje y se traslada alrededor
del sol ( ver Fig. 1-1 ) Existe también un satélite natural ( La Luna ) y muchos satélites artificiales los cuales tienen un tercer movimiento periódico en el espacio: El movimiento Orbital alrededor de la Tierra. Estos movimientos periódi -
cos son fundamentales para la definición de los Sistemas de - coordenadas y de Tiempo.
Los Sistemas de coordenadas terrestres están fijos
a la tierra y giran con ella. Son usados para definir las
coordenadas de puntos sobre la superficie de la tierra. Hay
dos clases de Sistemas terrestres llamados Sistemas geocén-
tricos y Sistemas topocéntricos ( ver !■' ig. 1-2 ).
Los sistemas de coordenadas Celestes no se trasla- dan pero pueden girar junto con la tierra. Son usados para
definir las coordenadas de cuerpos celestes tales como las estrellas. Hay cuatro sistemas celestes diferentes, llama -
dos " Eclíptico "de "Ascención Recta " de " Angulo Horario "
y " Sistema de Horizonte "
El Sistema Orbital no gira con la tierra pero se traslada con ella. Es usado para definir las coordenadas de
satélites que orbitan alrededor de la Tierra.
13
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
^ ESTRELLA
SISTEMA DE COORDENADAS TERRESTRES, CELESTES Y ORBITALES.
FIGURA 1 - 1
14
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
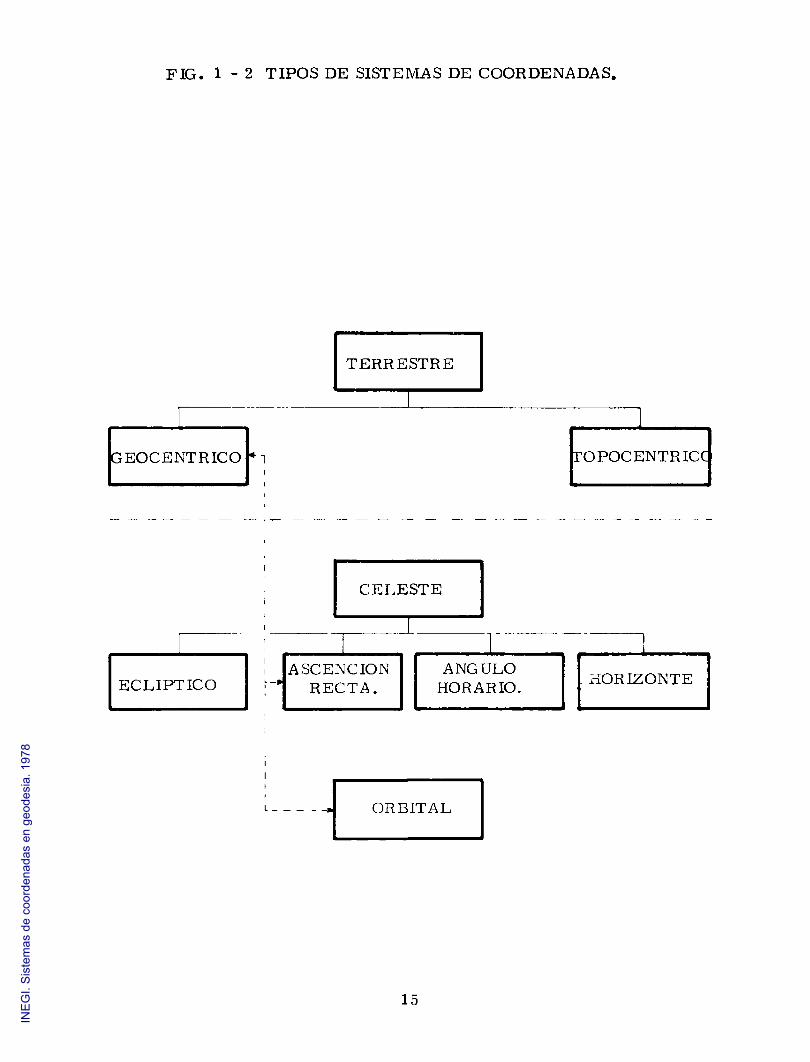
FIG. 1 - 2 TIPOS DE SISTEMAS DE COORDENADAS
15
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
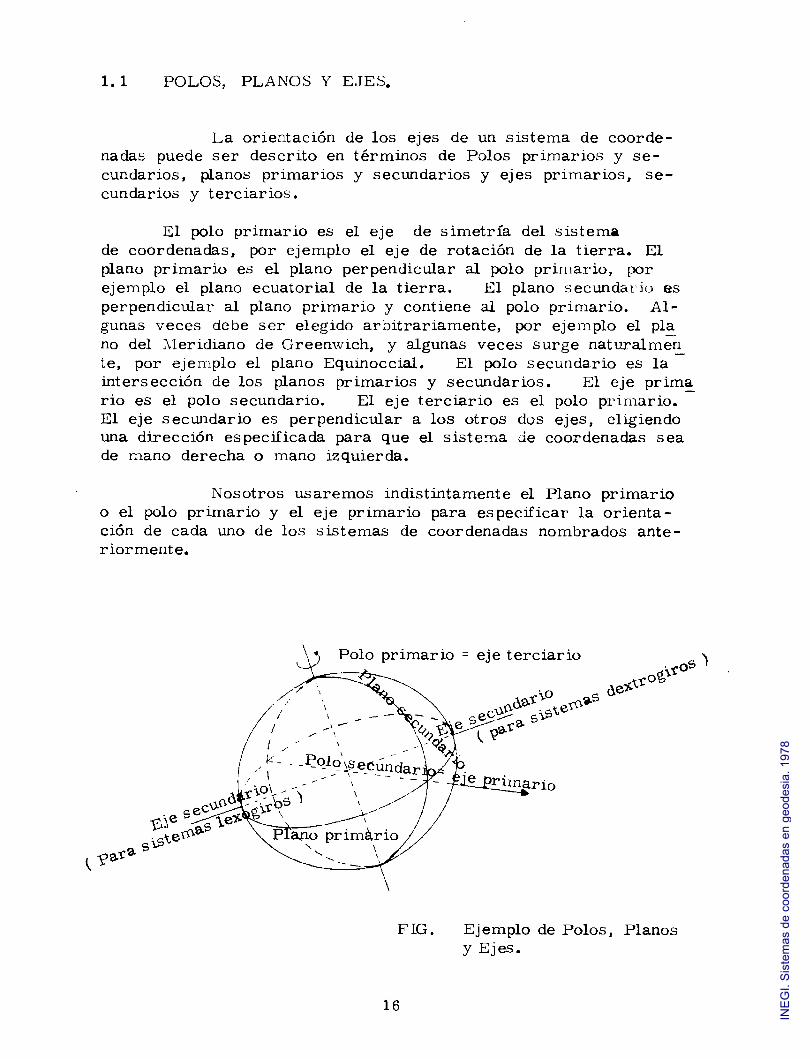
1. 1 POLOS, PLANOS Y EJES.
La orientación de los ejes de un sistema de coorde- nadas puede ser descrito en términos de Polos primarios y se-
cundarios, planos primarios y secundarios y ejes primarios, se- cundarios y terciarios.
El polo primario es el eje de simetría del sistema de coordenadas, por ejemplo el eje de rotación de la tierra. El
plano primario es el plano perpendicular al polo primario, por
ejemplo el plano ecuatorial de la tierra. El plano secundario es
perpendicular al plano primario y contiene al polo primario. Al- gunas veces debe ser elegido arbitrariamente, por ejemplo el pía
no del Meridiano de Greenwich, y algunas veces surge natural me n_
te, por ejemplo el plano Equinoccial. El polo secundario es la intersección de los planos primarios y secundarios. El eje prima
rio es el polo secundario. El eje terciario es el polo primario.
El eje secundario es perpendicular a los otros dos ejes, eligiendo una dirección especificada para que el sistema de coordenadas sea de mano derecha o mano izquierda.
Nosotros usaremos indistintamente el Plano primario o el polo primario y el eje primario para especificar la orienta- ción de cada uno de los sistemas de coordenadas nombrados ante-
riormente.
FIG. Ejemplo de Polos, Planos y Ejes.
16
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

PARA SISTEMAS GEOCENTRICOS TERRESTRES.
a). - El origen es cercano al centro de la tierra.
b). - El polo primario está alineado con el eje de rotación de
la tierra y el plano primario perpendicular a este polo es llamado el plano ecuatorial.
c). - El eje primario es la intersección entre el plano ecuáto rial y el plano que contiene al meridiano de Greenwich.
d). - Los sistemas son de mano derecha.
PARA SISTEMAS TOPOCENTRICOS TERRESTRES.
a). - El origen está en un punto cerca de la superficie de la
tierra.
b). - El plano primario es el plano tangencial a la superficie
de la tierra en ese punto.
c). - El eje primario es el punto norte ( la intersección entre el plano tangencial y el plano que contiene al polo norte
rotacional de la tierra ) .
d). - Los sistemas son de mano izquierda.
PARA EL SISTEMA ECLIPTICO CELESTE.
a). - El origen es cercano al centro del sol.
b). - El plano primario es el plano de la órbita terrestre, lla- mado plano de la eclíptica.
c). - El eje primario es la intersección entre el plano de la eclíptica y el plano ecuatorial y es llamado el equinoccio vernal.
d). - El sistema es de mano derecha.
PARA EL SISTEMA CELESTE DE LA ASCENCION RECTA.
a). - El origen esta cerca del centro del sol.
b). - El plano primario es el plano ecuatorial.
c). - El eje primario es el equinoccio vernal.
d). - El sistema es de mano derecha.
17
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
PARA EL SISTEMA DE ANGULO HORARIO.
a). - El origen está cerca del centro del sol.
b). - El plano primario es el plano ecuatorial.
c). - El plano secundario es el meridiano celeste { el plano que contiene al observador y al eje de rotación de la tierra ).
d). - El sistema es de mano izquierda.
PARA EL SISTEMA CELESTE DE HORIZONTE.
a). - El origen es cercano al centro del sol.
b). - El plano primario es paralelo al plano tangencial que pasa por el observador ( el plano del horizonte ).
c). - El eje primario es paralelo al punto norte del obser-
vador.
d). - El sistema es de mano izquierda.
PARA EL SISTEMA ORBITAL.
a). - El origen es el centro de gravedad de la tierra.
b).- El plano primario es el plano de la órbita del satélite
alrededor de la tierra.
c). - El eje primario está en el plano orbital y orientado hacia el punto de perigeo ( el punto en el cual el saté
lite se aproxima más a la tierra ) y es llamada línea
de los apsides .
d). - El sistema es de mano derecha.
1.2 TIEMPO UNIVERSAL Y TIEMPO SIDERAL.
También intimamente involucrado con la Rotación y traslación
periódica de la tierra están dos sistemas de tiempo llamados tiem-
po Universal( solar) (TU) y tiempo Sideral (TS). Un sistema de
tiempo está definido por la especificación de un intervalo y una épo ca.
18
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
El día solar es el intervalo entre dos pasajes suscesivos - del sol sobre el mismo meridiano terrestre.
El dfa sideral es el intervalo entre dos pasajes suscesivos
del equinoccio vernal sobre el mismo meridiano terrestre. La época sideral es el ángulo entre el equinoccio vernal y algún me
ridiano terrestre: Si éste es el meridiano de Greenwich, entonces
la época es el tiempo sideral de Greenwich ( TSG ). La época
solar es rigurosamente relacionada con la época sideral por una fórmula matemática. El tiempo sideral es el parámetro que reía ció na los sistemas terrestre con los celestes..
1.3 SISTEMAS DE COORDENADAS EN GEODESIA.
La Geodesia es el estudio de la forma y el tamaño de la tierra y
la determinación de las coordenada? de puntos sobre o encima de la -
superficie de la tierra.
Las coordenadas de una estación se determinan con respecto a
las coordenadas de otra estación haciendo una o más de las siguientes
cuatro categorías de mediciones ¡Direcciones, distancias, diferencias de distancias y alturas. Las mediciones angulares, Horizontales y - Verticales entre dos estaciones sobre la tierra ( como por ejemplo las medidas por un teodolito ) son las direcciones terrestres. Las medi-
das angulares entre una estación sobre la tierra y la posición de un
satélite ( como por ejemplo por fotografía del satélite contra el fondo
de las estrellas)son las direcciones del satélite. Las medidas entre una estación sobre la tierra y una estrella ( como por ejemplo las medidas por apuntamiento directo del teodolito sobre la estrella )
son las direcciones astronómicas. Las distancias entre dos es-
taciones sobre la tierra ( como por ejemplo las medidas con ins- trumentos de medición electromagnéticas ) son distancias terrestres .
19
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Las distancias entre una estación sobre la tierra y una posi- ción de satélite ( como por ejemplo las medidas por rayos laser )
son distancias de satélite. Las mediciones de la diferencia en
distancia entre una estación sobre la tierra y otras dos estaciones
( como por ejemplo las medidas por sistemas de posicionamiento Hiperbólico ) son diferencias de distancias terrestres. Las medi_ ciones de la diferencia en distancia entre una estación sobre la
tierra y dos posiciones de satélite ( como por ejemplo las medidas por sistemas integrados de desplazamiento doppler ) son diferen-
cias de distancia de satélite. Todas estas mediciones determinan las relaciones geométricas entre estaciones y son la base de la
Geometría Geodésica ( e. g. Bomford 1962 ).
Diferencias de altura geométrica y levantamientos gravimétri cos son mediciones referidas a las diferencias de potencial en el
campo de gravedad de la tierra y son el objeto de la Geodesia Fí-
sica ( e. g. Heiskanen y Mor it z 1967 ).
La relación funcional entre estas medidas y las coordenadas de las estaciones hacia y desde donde las cuales fueron hechas, es^ tá incorporada en un modelo matemático. Una solución única pa-
ra las coordenadas desconocidas puede obtenerse por la aplicación del proceso de estimación mínimos cuadrados ( Wells y Krakiwsky 19 71 ) a las mediciones y al modelo matemático.
Los detalles sobre sistemas de coordenadas como los emplea dos para Geodesia terrestre y de satélite pueden encontrarse en
Veis ( 1960 ) y Kaula ( 1966 ) y para Astronomía Geodésica en
Mueller ( 1969 ).
20
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
2.0 SISTEMAS DE COORDENADAS TERRESTRES.
En este capítulo discutiremos los sistemas de coordenadas
terrestres geocéntrico y topocéntrico.
Discutiremos primero los sistemas geocéntricos terrestres
usando solamente coordenadas cartesianas y considerando en de-
talle lo que significa " El eje de rotación de la tierra " y " El Meridiano de Greenwich " luego se describe la relación entre las
coordenadas cartesianas y curvilíneas. Se discuten los datums geodésicos. Finalmente son considerados los sistemas topocén-
tricos terrestres dando atención a lo que entendemos por " Super
ficie de la tierra " .
SISTEMAS GEOCENTRICOS TERRESTRES.
En la introducción se estableció que para los sistemas geo-
céntricos terrestres:
a). - El origen está cerca del centro de la tierra.
b). - El polo primario está alineado con el eje de rotación de la tierra.
c). - El eje primario es la intersección entre el
plano primario y el plano que contiene al me- ridiano de Greenwich.
d). - Los sistemas son de mano derecha.
La última especificación no tiene ambigüedad, . Como vere-
mos, las otras tres son ambiguas. Discutiremos primero los problemas para definir el eje de rotación de la tierra y el meri- diano de Greenwich. Luego discutiremos las traslaciones del origen desde el centro de la tierra.
21
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
2.1.1 MOVIMIENTO POLAR Y ROTACION IRREGULAR DE LA TIERRA.
Pensamos de la tierra como que gira sobre un eje fijo a
una velocidad uniforme. En la realidad, el eje no está fijo y la velocidad no es uniforme.
Hace más de setenta años se descubrió que la dirección
del eje de rotación de la tierra se mueve con respecto a la su-
perficie de la tierra. Este moviemiento polar se debe principal mente al hecho de que el eje de rotación de la tierra y la iner-
cia máxima no coinciden. El movimiento resultante es irregu- lar pero más o menos circular y en sentido contrario a las ma- necillas del reloj ( cuando lo vemos desde el norte ), con una amplitud de unos cinco metros y un período principal de 430 dfas ( llamado el período del Chandler ). Dos organizaciones interna-
cionales, el Servicio Internacional del Movimiento polar ( SIMP ) y la Oficina Internacional de la Hora ( O III ) Rutinariamente miden
este movimiento a través de observaciones astronómicas; el SIMP con cinco estaciones a la misma latitud y la O III a partir de unas
cuarenta estaciones distribuidas por todo el mundo. Los resulta- dos son publicados como las coordenadas del verdadero eje de ro- tación con respecto a un punto de referencia llamado Origen Inter-
nacional Convencional ( OIC ) el cual es la posición promedio del
eje de rotación durante los años 1900-1905 ( IUGG ( 1967 ) Bull. Geod. 86, 379 ( 1967 ). Resolución 19 ).
La figura 2-1 muestra el movimiento polar durante 1969, de-
terminado por el SIMP y la OIH.
tfe.ce unos treinta años fueron descubiertas otras irregulari- dades en la rotación de la tierra ( distintas al movimiento polar ).
22 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

y
( Hacia el Meridiano 90° de Long. Oeste)
FIGURA 2- 1
Enero 1969,
15 (metrqs
1 \ . \
' ' -- ~
5 Diciembre
1969
OIC
5 ______ .,_
10 metros
MOVIMIENTO POLAR.
X
( Hacia Greenwich )
23 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Existen tres tipos de irregularidades; variaciones estacionales,
probablemente debidas a cambios climatológicos o a mareas te- rrestres; de crecimiento secular debido a fricción por mareas -
y fluctuaciones irregulares ( Mueller 1969 ).
La variación estacional es la única de estas que se toma - en cuenta por ahora y es más o menos reproducible de año en
año.
Produce un desplazamiento a lo largo del ecuador de hasta
quince metros con respecto a un punto que gira uniformemente a través del año. ( Ver figura 2-2 ).
Debido a esta variación estacional, el meridiano de Green- wich { el plano que contiene el eje de rotación de la tierra y el centro del instrumento de tránsito del Observatorio de Greenwich) no gira uniformemente.
El meridiano ficticio cero, que gira uniformemente ( en lo
que concierne a los efectos del movimiento polar y de la varia - ción estacional ) es llamado el Observatorio Medio o Meridiano Astronómico Medio de Greenwich. Su localización es definida por la OIH.
2.1,2. SISTEMAS TERRESTRES INSTANTANEO Y PROMEDIO.
El Sistema terrestre promedio ( T.P. ) es el sistema ideal de coordenadas mundiales { Ver fig. 2-3 )
a). - Su origen está en el centro de gravedad de la tierra.
b), - Su polo primario es dirigido ha cié el OIC ( el polo
Norte promedio de 1900 - 1905 ) y su plano primario es el plano perpendicular al polo primario y contiene al centro de gravedad de la tierra ( el plano ecuato-
rial promedio ).
c). - Su plano secundario es el plano que contiene al polo primario y al Observatorio Medio.
24
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

1967
FIGURA 2-2
Posición de un punto que se mueve uniformemente
a lo largo del Ecuador, menos la posición del
punto sobre el Ecuador actual
2 5
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Eje de Rotación
de la Tierra.
SISTEMAS DE COORDENADAS TERRESTRES Y
G EODE SIC AS.
26
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
La intersección de estos dos planos es el polo secundario
o eje primario.
d). - Es un sistema de mano derecha.
Podemos definir entonces el vector de Posición R¿ de un
punto de la tierra " i " en término de sus coordenadas cartesia- nas x, y, z, como:
Ri
X
y
T. p.
El sistema terrestre Instantáneo ( T.I. ) se define como
sigue:
a). - Su origen está en el centro de gravedad de la tierra.
b). - Su polo primario es dirigido hacia el eje verdadero
de rotación de la tierra ( Instantáneo ).
c). - Su eje primario es la intersección del plano prima- rio y el plano que contiene al eje de rotación verda-
dero y al Observatorio Medio.
d).- Es un Sistema de Mano Derecha.
La característica principal de estos dos sistemas es que son
sistemas Geocéntricos que tienen sus orígenes en el centro de gra
vedad de la tierra y el eje de rotación de la tierra como su polo
primario.
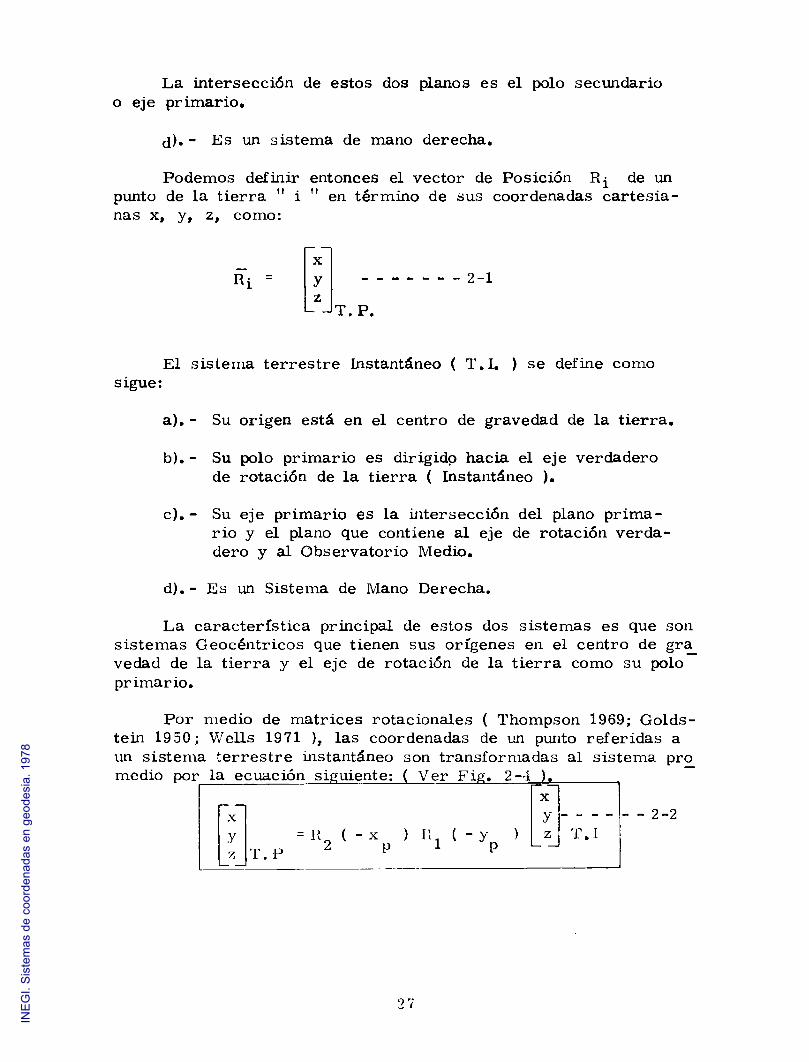
Por medio de matrices rotacionales ( Thompson 1969; Golds- tein 1950; Wells 1971 ), las coordenadas de un punto referidas a
un sistema terrestre instantáneo son transformadas al sistema pro
medio por la ecuación siguiente: ( Ver Fig. 2-4 ).
x
y
X
y
T. P = R ( - x ) II ( - y ) z T.I
2 p 1 p
2-2
27
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Y +-
X i P
6 Yn
Polo terrestre instantáneo
OIC
X
X.
Después de Rjí- Yp )
OIC
X
FIGURA 2 - 4
TRANSFORMACION DEL SISTEMA TERRESTRE INS-
TANTANEO AL SISTEMA TERRESTRE PROMEDIO.
28
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Donde ( Xp , Yp) están expresadas en Arco Segundo y las matrices de rotación son:
Ri ( - Y„ ) =
10 0 0 Cos (-Yp) Sen(-Yp)
0 -Sen ( - Yp ) Cos í - Y p )
Con una rotación ( negativa ) en el sentido de las maneci-
llas del reloj, alrededor del eje de las " x " y :
Cos ( - Y p ) 0 - Sen ( - Y p ) 0 1
0 R2 ( -xp ) =
Sen ( - Xp ) Cos ( - Xp )
Con una rotación ( negativa ) en el sentido de las maneci-
lla inversa es: lias del reloj, alrededor del eje de las "y "
T.I
-1
=[r2 <-Xp) Ri ( - Yp >j T.P.
Y por la característica Ortogonal de las matrices rotaciona- les esto es:
-1 T R ( e ) = R (fi)=R (-8 ); Tenemos
= R1 ( Yp) T.I
R 2 (Xp )
2.1.3. SISTEMAS GEODESICOS.
T. P - 2-3
En términos de coordenadas Cartesianas, el Sistema de Coor- denadas Geodésicas ( G ) es un sistema tal el cual es introducido
a la tierra de manera que sus tres ejes estén coincidentes con o paralelas a los correspondientes tres ejes del sistema terrestre
promedio.
( Ver Fig. 2-3 ).
29
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

La primera situación define un sistema Geodésico Geo -
céntrico mientras que al segundo sistema no geocéntrico es r£
ferido comúnmente como un sistema Geodésico Relativo cuya relación con el sistema terrestre promedio está dado por las
tres componentes de traslación del Datum.
Xo
Yo
Zo o
Y en forma de ecuación vectorial, la relación es:
Ri = r0+ fi
Donde el vector de posición r¿ está referido al sistema
Geodésico, esto es:
ri
x
y
x Y Z
T.P
Xo
Yo Zo
+ X
Y Z
2-4
G
Una explicación más detallada de como el sistema Geodé-
sico Relativo es establecido dentro de la tierra corresponde ha-
cer ahora ( Sección 2.3 ) pero antes de hacer esto sería muy
útil revisar las relaciones entre coordenadas Cartesianas y cur- vilíneas.
30
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

2. 2 RELACIONES ENTRE COORDENADAS CARTESIANAS Y CURVILINEAS.
En esta Sección describiremos primero las coordenadas
cartesianas ( x, y, z ) y curvilíneas ( Latitud, Longitud, cota )
para un punto sobre el Elipsoide de Referencia.
Desarrollaremos expresiones para su vector de posición en términos de varias latitudes. Finalmente la transformación
de coordenadas Geodésicas ( <p, x, h ) a ( x,y,z ) y sus inver sas, serán discutidas.
2.2.1 COORDENADAS, CARTESIANAS Y CURVILINEAS DE UN
PUNTO SOBRE EL ELIPSOIDE DE REFERENCIA.
El elipsoide específico usado en Geodesia como una super-
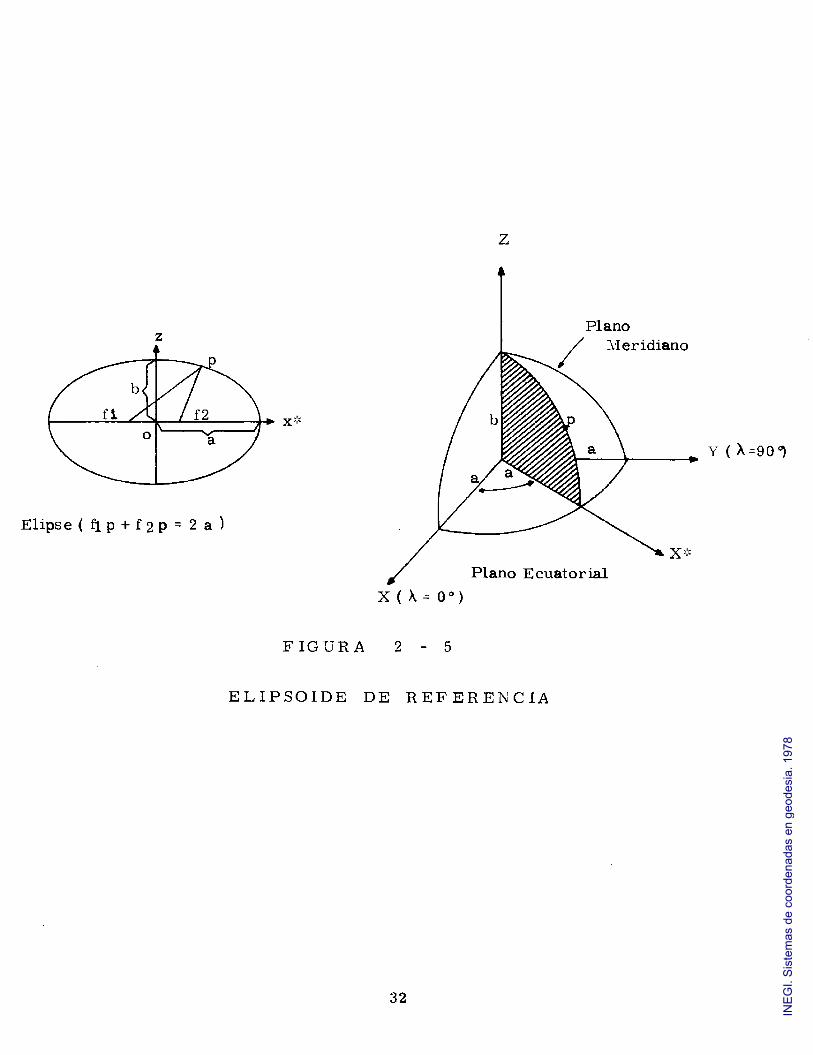
ficie de Referencia es un elipsoide de revolución formado de la rotación de una elipse sobre su semi eje menor " b " ( Figura
2-5 ). El semi eje mayor " a " y el achatamiento f = a - b 2-5
Son los parámetros que definen al elipsoide de referencia.
Otros parámetros muy útiles asociados con este elipsoide
particular son la primera exentricidad 2_ - b^ 2-6
Y la segunda excentricidad.
(e'f- a2 " b2 2-7
Un sistema de coordenadas cartesianas es sobre puesto al elipsoide de referencia. ( Ver figura 2-5 ) de manera que :
■íl
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
1 L
f ft X / f 2 V
V °
Elipse (fip + f2P = 2a)
x*
Plano
Meridiano
Plano Ecuatorial
X ( X - 0o)
FIGURA 2-5
ELIPSOIDE DE REFERENCIA
Y ( X -90 °)
32
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

a). - El origen del sistema cartesiano es centro del elipsoide.
b). - El polo primario ( eje Z ) del sistema cartesiano es el
semi eje menor del elipsoide. El plano primario es
perpendicular al eje primario y es llamado plano ecuatorial.
c). - Cualquier plano que contenga el semi eje menor y
corte la superficie del elipsoide es llamado un plano meridiano. El plano meridiano particular elegido
como el plano secundario es llamado el plano meri-
diano de Greenwich. El polo secundario ( eje X ) es la intersección del plano ecuatorial y el plano del
meridiano de Greenwich.
d). - El eje Y es elegido para que forme un sistema de
mano derecha y descanse en el plano ecuatorial 90° en sentido contrario a las manecillas del reloj, del
eje X.
La ecuación de este elipsoide en términos de coordenadas
cartesianas es:
Donde
xT >E X =
[x Y z]
2-8
'E
0
0
0
1
a^
0
0
0 -
1
- - - 2 —9
- - - — 2—10
La latitud de un punto es la menor distancia angular entre
el plano ecuatorial y la normal al elipsoide que pasa por el punto
medido en el plano meridiano del punto. La línea perpendicular del elipsoide a un punto es llamado la normal elipsoidal de ese
punto.
33
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Las normales al elipsoide solamente pasan a través del centro geométrico del elipsoide en el plano ecuatorial o a través
del semi eje menor. Por lo tanto hay dos clases diferentes de la- titud. El ángulo entre la normal del elipsoide al punto y del pla-
no ecuatorial es llamado latitud Geodésica $ . El ángulo entre
la línea que une al punto con el centro de la elipse y al plano ecua
torial es llamado latitud Geocéntrica if • Hay también una ter-
cera latitud, usada frecuentemente como una conveniencia matemá- tica, llamada la latitud reducida ¡3 . (Ver figura 2-6 ).
La longitud X de un plano meridiano es la distancia angular en sentido contrario a las manecillas del reloj entre el plano meri
diano de Greenwich y el plano del meridiano del punto, medido en
el plano ecuatorial ( Ver figura 2-5 ).
La altura elipsoidal h de un punto es su distancia lineal sobre el elipsoide, medida a lo largo de la normal elipsoidal al punto ( Ver figura 2-8 ).
2.2.2.- EL VECTOR DE POSICION EN TERMINOS DE LA LATITUD GEODESICA.
Consideremos a un punto P sobre la superficie del elipsoide. La coordenada de P referida a un sistema con el eje primario
( denotado X* ) en el plano meridiano de P son:
— - — - - 2-11
El plano perpendicular a la normal del elipsoide en P, y
pasando a través de P es llamado el plano tangente a P. De la
figura 2-7 la pendiente del plano tangente es:
-If-. Ton (90- + *J « - ■§«*. 2-12
34 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

z
* LATITUD GEOCENTRICA
f LATITUD GEODESICA 0 LATITUD REDUCIDA
P PUNTO ACTUAL Q.R. PUNTOS PROYECTADOS
FIGURA 2 - 6
LATITUDES VARIAS
35
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

z
FIGURA 2-7
LINEA TANGENTE A LA ELIPSE MERIDIANA.
36 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

La pendiente puede también calcularse de la ecuación
de la elipse meridiana, como sigue:
9 2 (x*r + z
b2
b2 (x')Z + a2 z2 = a2 bz
2bZ X* d X * -t- 2 o2 z d z = O
- 2-13
- - 2-14
-2-15
d z dX*
b2X* a2 z
2-16
Enseguida de las dos ecuaciones que se tienen para la
pendiente tenemos
cial.
b2 ** eos 4> 2-17
•2-18 o z sen <p tf x* sen ; a2 z eos y
Y después de elevar al cuadrado tenemos
2- 19
Expresando las ecuaciones 2-14 y 2-19 en forma matri-
b4(x*)Z sen2 y - a* z2 eos2 y -
b4 sen2 -o4 eos2 tp (x* )2 -- 2 -20
La inversa de la matriz coeficiente es:
o2 a4 eos2 <p
o2 b2 ( a2 cos2 cp 4- b2 sen2 <p)
Por lo que
- b2 b4 sen2 cp
(/)2
a2 cos2 y -t- b2 sen2 <p
4 2 a eos cp b4 sen2y
Y obteniendo la raíz cuadrada
(a2 cos2cf> + b2 sen2 cp )[/z
a eos <p b2 sen íp
-2-21
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
De la Figura 2-6
eos <p =
Pero de la ecuación 2-21
o eos <p
I az eos2 tp ■+■ b2 sen2 ip ) ^
Por lo que:
N = (a2 cos2 (p -+■ b2 s e n2 ip ) '/2
--2-22
N eos tp o
h2 N sen íp
— — — — — —— 2-23
N es el radio de curvatura de la superficie del Elipsoide en el plano perpendicular al plano meridiano ( llamado plano
Primer vertical ).
Nos referiremos ahora al vector de Posición de un Siste- ma con el eje primario en el meridiano de Greenwich, esto es giramos el sistema de coordenadas sobre el eje en, el sen- tido de las manecillas del reloj ( giro negativo ) a través de la longitud
r = R, I- X) X o
cos (- X ) - sen ( - X)
sen (— X) eos (- X)
N eos o
N sen ip a
= N eos eos <p
eos X sen X
sen tp
38 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
2.2.3.- EL VECTOR DE POSICION EN TERMINO DE LAS
LATITUDES GEOCENTRICA Y REDUCIDA.
De la Figura 2-6 el vector de posición del punto P en términos de la latitud geocéntrica ^ es:
r = eos \]/
o sen [f/
Donde 17 | es la magnitud de 7
Virando el sistema de coordenadas para introducir la longitud, como antes:
= Rs (- M
eos eos X eos 1// sen X
sen ^
2-25
De la Figura 2-6, la latitud reducida p del punto P es
la latitud geocéntrica de los puntos Q y R, donde Q es la pro- yección de P, paralela al eemi eje menor hasta intersectar a un
cículo con radio igual al semi eje mayor, y R es la proyección del punto P paralela al semi eje mayor hasta intersectar a un
círculo con radio igual al semi eje menor.
El vector de posición de P en términos de la latitud re-
ducida [5 es:
r = x* o
eos /3 o
sen /3
3 9
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Girando el sistema de coordenadas para introducir la
longitud:
r = (- X o co# /3 cos X o cos /3 sen X
b sen /3 — — — — -2~26
2.2.4.- RELACIONES ENTRE LAS LATITUDES GEODESICA,
GEOCENTRICA Y REDUCIDA.
De las ecuaciones 2 - 24; 2 - 25 y 2 - 26
b2 b = —=- tan cp cos X = tan cos X = tan /3 cas X ,
Cancelando el término cos X ;
tan B - — tan <p a r
fan /3 = -y- ton \f/
tan = ton <p
•2-27
2-28
-2-29
2.2.5.- EL VECTOR DE POSICION DE UN PUNTO ENCIMA DEL
ELIPSOIDE DE REFERENCIA.
Considerando un punto "i" de la tierra como el indicado en la Fig. 2-8; cuyas coordenadas son la latitud geodésica <p ,
la longitud X y la altura elipsoidal h . La proyección
de i sobre la superficie del elipsoide es a través de la normal elipsoidal definida por el vector unitario z .
El vector de posición de i es entonces la suma de dos vectores, llamados
f, =7 p4 h p. 2-30
Donde rp está definido por la ecuación 2-24 y £z es el vector unitario definido por la ecuación 2-6 8 c , esto es
40
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
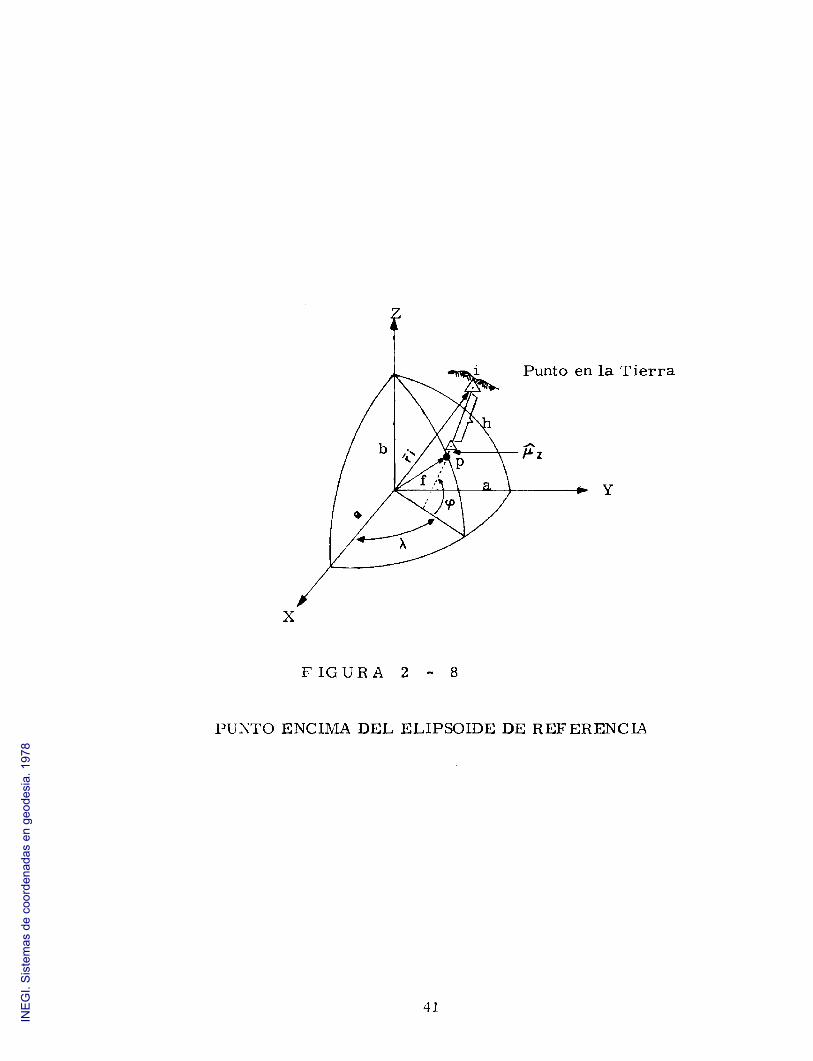
FIGURA 2-8
PUNTO ENCIMA DEL ELIPSOIDE DE REFERENCIA
41
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

COS <p COS <p
sen 9
cos sen
Entonces:
= N
COS <f> COS X
costp sen X b2
— sen <p a£
+ h
r; =
(N + h) cos (p cos X
(N + h) cos tf> sen X
+ h ) sen <p
cos <p cos X
cos y sen X
sen <p
—# BV Ol •• — — — ■ ■ 2 —» 2 |
Ahora el vector de posición ri en la ecuación 2-31 se
refiere a un sistema de coordenadas cuyo origen es el centro -
geométrico del elipsoide. Si este elipsoide define a un sistema geodésico relativo entonces su centro no coincide en general, con
él centro de gravedad de la tierra. La expresión para el vec- tor de posición en el sistema terrestre promedio es, de la ecua- ción 2-4
(?¡)T.P xo yo zo
(n)i
(ri)TP =
X
y
z T.P
*0 yo
zo
+
(N 4- h) cos <p cos X
( N 4-h) cos sen X
(^4- + h) sen <p a _
Esta expresión da la transformación general de coordena-
das geodésicas relativas ( <p , X , h . ) a coordenadas terrestres promedio ( x, y, z ), dando el tamaño del elipsoide ( a, b ) y las componentes de traslación ( x0, y0, Zo ).
42 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

2. 2. 6. - TRANSFORMACION DE COORDENADAS CARTESIANAS
TERRESTRES PROMEDIO A GEODESICAS.
Una transformación muy útil es la inversa de la ecuación
2-32.
Dadas las coordenadas terrestres promedio ( x, y, z ),
las componentes de traslación ( x0, y0, z0 ) y el tamaño del elipsoide (a, b ), se calculan las coordenadas geodésicas rela-
tivas ( <pt X j h ).
Primero trasladamos el origen del centro de gravedad al
centro del elipsoide. De la ecuación 2 - 32
T.P
x0
yo zo
2-33
La longitud X es calculada directamente de:
2-34
La latitud <p y altura elipsoidal h son más difíciles de calcular ya que N es una función de 9 , de la ecuación 2 - 22.
N = (cos2<p + serf y}175 2-35
Y "h" no es conocida. Comenzamos por calcular
e2=i-^ -2-36; P =(x2+y2)r/2 2-37
43 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

De la ecuación 2-31
p2 = (N + h)2 cos2<f> cos2 X 4- (N+ h)2 cos2<p sen2 X
p = (N + h)eos 9 ; h=^ COS <p
-N 2-38
También de 2 - 31
Z=(N ^ + h) sen <p =(N- -—N + h) sen <p = (N + h - e2 N)sen </>, a£ o
Por lo que:
j_ =(N + h-e2N)sen<p =tqny (,_ e!_N_ )_ 2_
(NH-h)cos <p N+h 39
Esta ecuación puede desarrollarse de dos maneras: Para
producir una solución directa para jp , la cual es muy com-
plicada, o una solución iterativa, que es más simple. Conside remos primero la solución iterativa. Tenemos:
El procedimiento iterativo es iniciado estableciendo:
No = a; ho = (x2+ y¿+ zc)K/z -(ab)'/2 2 \l/
<po = ton- i (4-) No+ho .
Cada iteración consiste entonces de la evaluación en orden:
N i =
hi =
(eos2 <pi -»• b sen2>p¡-i)^2
-Ni eos <p¡_|
(p i = ton-1 e2 Ni r1
(-)(1- V P Ml N¡+ h¡
44
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Las iteraciones son repetidas hasta:
(hi- hi-i) < of
(<P¡ " <P¡ -|kf .
Para alguna elección de un valor apropiado de £ ( Por
ejemplo £ = 10 para doble presición Fortran en la computa-
dora IBM 360 ).
Retornando a la ecuación 2 - 391 eliminamos h usando la ecuación 2-38 para obtener:
-§-= tonyl- ''iWin
p. tan <p — 2 = e2 N sen <p
En esta ecuación solamente desconocemos . Modi- ficaremos esta ecuación para obtener una ecuación que pueda
resolverse por tan y . Sustituyendo la expresión para N de la ecuación 2-35 tendremos:
a e'sentp p.tanv-z = ?
(cos + b sen <p)i/2
Dividiendo el numerador y el denominador del 2° miem-
bro por cos <p . 5 a e£ tanu>
p. tony -z z-— (l+ b£_tan2u>)i/2
a2
(p ton tp - 2)(i +{l-e2)tan2 9)1^2 = ae2 tan tp
Elevando al cuadrado esta ecuación para eliminar la raíz cuadrada
(p2 ton2<p -2p z tan <p +■ zz) (I + (I - e') tan' 9 ) = o'e"* tan' 9 2 4 . 2
p2 tari* <p-2pz tan3 <p +(/3 + z2) tan2 9 - 2^ + (1 2 ) "°
donde:
45
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Esta es una ecuación de 4o grado en tan <p ( Dicuadrá-
tica ) en la cual los valores de todos los coeficientes son co- nocidos. Procedimientos normales para la solución de ecuacio-
nes de 4- grado, existen ( ver por ejemplo Korn y Korn, 1968 ) y han sido aplicados a esta ecuación por Paul ( 1973 ) para pro-
ducir un programa de cálculo el cual es 25% aproximadamente me
nor que los programas iterativos.
Inmediatamente que se obtiene una solución para tan <p ; N y
h son calculadas de las ecuaciones 2 - 35 y 2 - 38 respectivamen-
te.
2.3. DATUMS GEODESICOS.
Hay dos figuras naturales de la tierra ( ver Fig. 2-9 ); La
Superficie topográfica o física de la tierra incluyendo la superficie
de los océanos ( el terreno ) y la superficie equipotencial del cam- po de gravedad de la tierra, la cual coincide con una superficie idea
1 izada de los océanos ( el geoide ).
Mediciones de control ( v. gr. distancias, ángulos, nivelaciones geométricas ) son hechas entre punto sobre el terreno los cuales lla- mamos Puntos de Control.
Estas mediciones son usadas para determinar la relación geomé
trica entre los puntos de control en una serie de cálculo llamada a-
juste de la red. Otros puntos son entonces referidos a la red de puntos de control a través de mediciones y cálculos posteriores lla-
mados densificación.
El método clásico es tratar las mediciones; redes y cálculos
verticales separadamente de las mediciones, redes y cálculos horizon
tales. Sin embargo el método tridimensional unificado corriente men te está ganando favor. ( Hotine 1969 ).
En el procedimiento clásico de mediciones y redes verticales son referidas a una superficie coordenada o datum ( vertical ) el cual
es el geoide.
En vez de usar el geoide como la superficie coordenada o datum
para las mediciones y redes horizontales también, es introducida una
tercera figura ( no natural ), de la tierra ¡el elipsoide de revolución
discutido anteriormente.
46
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
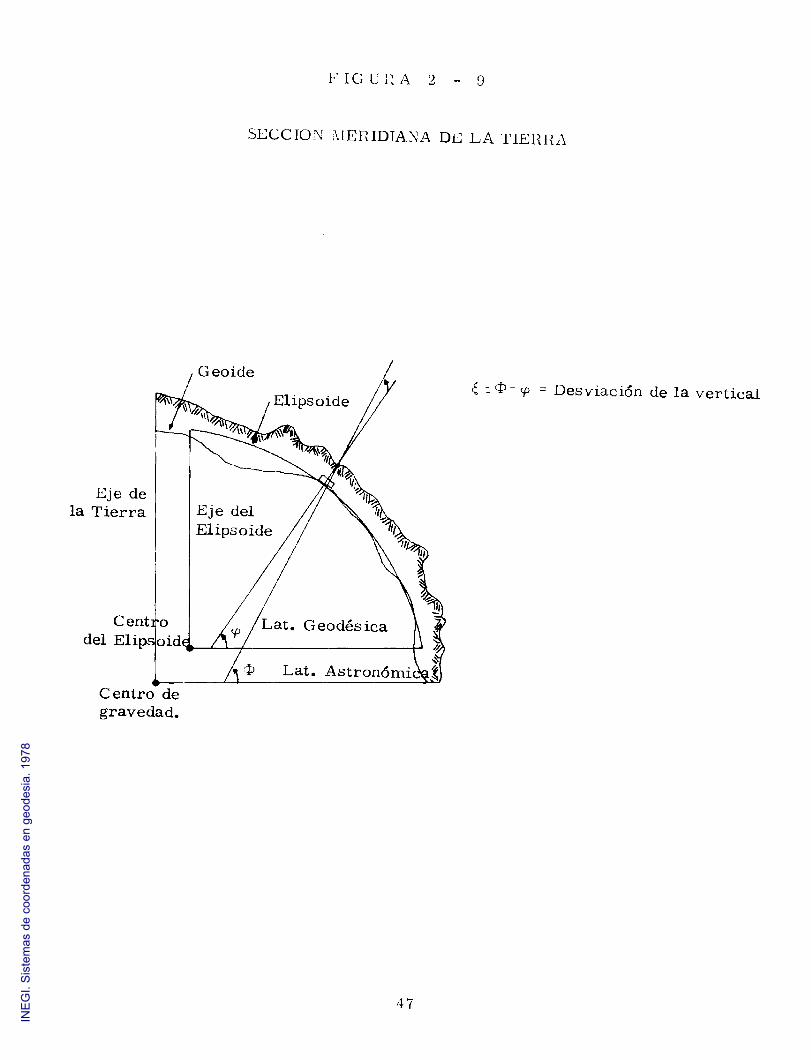
FIG UK A 2-9
SECCION MERIDIANA DE LA TIERRA
Geoide
Eje de la Tierra
Centro del Elips
Centro de gravedad.
£ : 0 cp - Desviación de la vertical
47
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

La razón de que sea usado como datum horizontal una figura
matemática como el elipsoide es simplificar los cálculos requeridos
para el ajuste de la red y la densificación.
Son necesarios términos de corrección en estos cálculos si
tomamos en cuenta el hecho que el datum no es el geoide.
Puede ser elegido un elipsoide que se aproxime al geoide lo más próximo para que estos términos de corrección puedan considerarse lineales y para algunas aplicaciones siempre ignoradas. Para una
buena elección del elipsoide ( ver Fig. 2-9 ) la separación entre el
geoide y el elipsoide ( altura del geoide ) es siempres menor de 100 m y la diferencia entre la normal del geoide y la normal del elipsoi^
de en cualquier punto ( desviación de la vertical ) es generalmente menor de 5 seg. de arco, muy raramente excede del minuto de arco.
Superficies más simples que el elipsoide ( Tales como la esfe- ra o el plano ) pueden ser aproximaciones suficientes al geoide si el área en consideración es suficientemente pequeña y lo la aplicación de control permite menores coeficientes de calidad.
La introducción de una superficie nueva ( el elipsoide ) tienen un precio.
La red de control horizontal ( esto es las coordenadas de los
puntos de la red ) esta siendo referida al elipsoide. Por lo tanto antes de que puedan comenzarse los cálculos de la red, primero de- ben ser reducidas las mediciones de control de manera que elllas tara bién estén " referidas 11 al elipsoide.
Es importante distinguir entre el datum ( La superficie coorde
nada o superficie elipsoide ) y las coordenadas de los puntos de la red referida al datum. Es una práctica común pero que confunde ( Particularmente en Norteamérica ) usar el término Datum para el conjunto de las coordenadas.
48
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

2.3.1. PARAMETROS PARA EL POSICIONAMIENTO DEL DATUM.
Para establecer un elipsoide como la superficie de referen-
cia para un sistema de control debemos de especificar su tamaño y su forma ( generalmente por la asignación de valores al semi-,
eje mayor y al achatamiento ) y debemos especificar su posición con respecto a la tierra. Un elipsoide bien posicionado cerrará
aproximadamente con el geoide sobre el área cubierta por la red hecha para establecer el datum.
Los parámetros a los cuales le asignamos valores para - especificar la posición del elipsoide los llamamos " parámetros
para el pos icionamiento del Datum "
En un espacio tridimensional cualquier figura ( particular -
mente nuestro elipsoide ) tiene seis grados de libertad, esto es, seis formas en las cuales su posición con respecto a una figura
fija ( en nuestro caso la tierra ) puede ser cambiada.
Entonces hay seis parámetros posicionadores del datum.
Otro punto de vista de esto es considerar dos sistemas cartesianos de coordenadas tridimensionales: Uno fijo al elipsoide
y otro fijo a la tierra. En general los orígenes de los dos sis-
temas no coincidirán y los ejes no serán paralelos. Por lo que
para definir la transformación de un sistema al otro debemos es- pecificar la localización de un origen con respecto al otro siste-
ma y la orientación de los ejes de uno con respecto al otro
sistema, esto es, tres coordenadas y tres ángulos de rotación. Estos seis parámetros proveen una descripción de los seis gra-
dos de libertad y asignándoles valores pos icio nan al elipsoide con
respecto a la tierra. Ellos son nuestros parámetros posicionado - res del Datum. Un Datum, entonces, es completamente especi-
ficado por la asignación de valores a 8 parámetros del elipsoide:
Forma y tamaño y los seis parámetros pos icionadores del Datum.
49 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
De hecho hay en uso dos clases de parámetros posiciona-
dores del datum.
lina clase es obtenida considerando los sistemas de coor-
denadas fijas ai elipsoide y fijos a la tierra, teniendo sus oríge-
nes en las inmediaciones del geocentro. La otra clase es obte- nida considerando ios sistemas de coordenadas fijos al elipsoide
y fijo a la tierra teniendo sus origenes cercanos a la superficie
de la tierra en un punto que llamamos Punto Inicial del Datum.
En el primer caso ( geocéntrico ) el sistema de tierra fija en el sistema terrestre promedio de la sección 2.1.2 y el siste-
ma de elipsoide fijo es el sistema geodésico de la ecuación 2-31
( excepto que nosostros consideramos que en general los ejes te- rrestres promedio y geodésico no son paralelos ). En este caso los parámetros pos icio nadores del datum son las coordenadas te- rrestres promedio del origen del elipsoide ( Xo,Yo,Zo,de la ecua- ción 2-32 ) y tres ángulos de rotación ( Digamos wl , wg , W3 ) requerido para definir el desalineamiento entre los ejes. Por su-
puesto que es altamente deseable que el elipsoide sea posicionado de manera que estos ángulos sean tan pequeños como sea posible
y particularmente que los dos ejes de simetría ( el eje menor del elipsoide y el eje promedio de rotación de la tierra o el eje Z del Terrestre Promedio ) sean paralelos.
En el segundo caso ( topocéntrico ) el sistema de tierra fija
es un sistema astronómico local en el punto inicial y el sistema de
elipsoide fijo es un sistema geodésico local con el mismo punto. ( Los sistemas astronómico local y geodésico local están discutidos
en la sección 2-4 ).
Antes de proseguir adelante, vamos a considerar la geometría en la vecindad de un punto sobre la superficie de la tierra. En la Fig. 2-10 está una vista exagerada de un plano meridiano geodésico
que pasa por un punto, mostrando el elipsoide seccionado, al geoide, muchas superficies equipotenciales relacionadas al geoide, y el terre
no. Una particular normal elipsoidal intersecta al elipsoide, al
geoide y al terreno en Q, P y T respectivamente.
50 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Hay tres normales " naturales " correspondientes a este
elipsoide normal: vertical de la gravedad en la superficie)
( Perpendicular a la superficie equipotencial en T, pasando a través de T ). La vertical de la gravedad en el geoide ( per-
pendicular al geoide pasando a través de P );la línea de ploma-
da ( perpendicular a todas las superficies equipotenciales entre
el terreno y el geoide, que pasan a través de T ). En general la " plomada " es curvada mientras que las otras son líneas re£
tas y ninguna de estas tres actualmente descansa en el plano me; ridiano geodésico. Son mostrados aquí como proyecciones sobre
este plano.
Si la curvatura de la plomada es ignorada las verticales de
la gravedad son paralelas.
El plano meridiano astronómico es el plano que contiene una
de las verticales de la gravedad y una paralela al eje " Z" del terrestre promedio. El ángulo de la Vertical de la gravedad y
la paralela al eje ''Z ! del T.P. es la " Colatitud Astronómica "
( 11/2 - <f> )
El ángulo entre el plano meridiano astronómico y un plano
meridiano de referencia ( greenwich ) es la longitud astronómica
A . El ángulo entre la normal del elipsoide y la vertical de
la gravedad es la " Desviación de la vertical " la cual puede re-
solverse como una componente { en el plano meridiano geodé- sico y una componente rj en el plano primer vertical geodésico ( El plano perpendicular al plano meridiano geodésico el cual con-
tiene a la normal del elipsoide ). Correspondiendo a las dos ver ticales de gravedad hay dos conjuntos de valores para la latitud
astronómica, longitud y componentes de la desviación. Y si es ignorada la curvatura de la plomada, estos dos conjuntos son igua-
les.
Si el elipsoide es posicionado de manera que sus ejes geocén
trieos sean paralelos a los ejes terrestres promedio ( esto es que
wi , wg , w3 - 0) entonces;
£ - $ — cp 2 — 4 o
7) = (A - X) eos <P 2—41
51
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
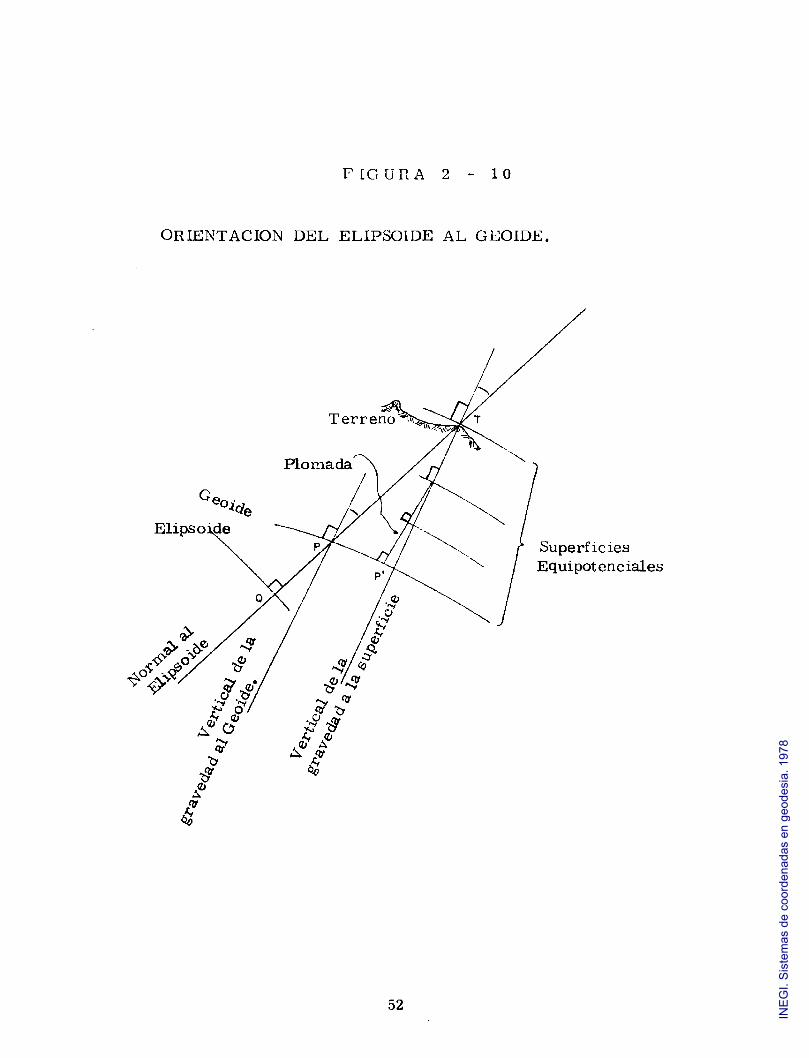
FIGURA 2 - 10
ORIENTACION DEL ELIPSOIDE AL GEOIDE.
52
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Donde ( , X , ) son las coordenadas geodésicas comunes de
( Q, p y t ).
La distancia entre el elipsoide y el geoide medida a través
de la normal al elipsoide ( Q P ) es la " altura geoidal " NÍ La distancia entre el elipsoide y el terreno medido a través de la nor
mal del elipsoide ( Q T ) es la " altura elipsidal " " h La^
distancia entre el geoide y el terreno medido a través de la plo-
mada ( P'T ) es la " altura ortométrica " " H Si la curva-
tura de la plomada es ignorada;
h = N* + H 2-42
Dado un punto a una distancia cualquiera de T, el ángulo entre el plano meridiano geodésico y el plano que contiene ese
punto y la normal del elipsoide QPT es el 11 azimut geodésico 11
" a " de ese punto con respecto a Q, P o T. ( Actualmente este es el azimut de la " sección normal " y está referido al azi-
mut geodésico por correcciones pequeñas ( Bomford 1971 ) ).
El ángulo entre el plano meridiano astronómico y el plano
que contiene este punto y la correspondiente vertical de la grave-
dad es el " azimut astronómico " " A " de ese punto con respec-
to a P o T dependiendo de cual vertical de la gravedad sea la usa- sa.
Y# que la desviación de la vertical es pequeña entonces para
todos los puntos la diferencia;
8 a = A — a 2-43
Es aproximadamente constante y es el ángulo entre los pla- nos meridianos geodésicos y astronómico.
Volviendo a los parámetros posicionadores del datum topo-
céntrico, es natural especificar que nuestro sistema geodésico lo- cal en el punto inicial tiene su origen sobre la superficie datum, esto es, sobre el elipsoide.
En el procedimiento clásico { no tridimensional ) la altura Ortométrica ( H ) entra en las redes horizontales solamente en la
reducción de cantidades de superficies al geoide, por lo tanto es
natural tomar nuestro sistema astronómico local en el punto inicial
que tiene su origen en el geoide.
53 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Denotando las cantidades con un índice cero, para el -
punto inicial, vemos entonces que los seis parámetros posicio- nadores del datum son, en este caso, las coordenadas geodési-
cas del origen astronómico local ( <f>o, Xo, No ) y los ángu-
los de rotación requeridos para definir la transformación entre
los sistemas geodésicos local y astronómico local ( £o, 170,800).
2.3.2. ESTABLECIMIENTO DE UN DATUM.
Hemos visto que el datum está definido por la asignación de
valores a cualquiera de los ocho parámetros ( a, b, x0, y0 , Zo, w,
w2, w3 ) o de los ocho parámetros (a,b,<po,Xo,No,£o, 170,800). Sin
embargo un conjunto arbitrario de valores no nos daré generalmen- te un datum satisfactorio. Recordamos que es importante que un datum coincida aproximadamente con el geoide sobre el área de la
red para la cual es el datum,y que los ejes geocéntricos del sist£ ma de coordenadas geodésicas sea aproximadamente paralelos a los
ejes del " Terrestre Promedio particularmente que los ejes de simetría sean paralelos. Los procesos para la asignación de va-
lores de los 8 parámetros del datum de manera que sus caracte-
rísticas sean obtenidas se llama " Establecimiento de un Datum."
Para comenzar en el establecimiento de un datum, los valo- res siempres son asignados al conjunto topo céntrico (o, b, <p o, Xo ,
No, £o, Tjo, Sao } preferentemente que al conjunto geo-
céntrico ( o, b, x<n y0 , z0 , w, , wg , ; ) porque es el conjunto
que está relacionado con las mediciones geodésica y astronómica las cuales debemos usar en el establecimiento del datum.
Vemos que debemos saber como elegir algunos valores para (o, b, <pot Xo, No, f o , t)9, Bao ) de manera que los valores de
( N , £ , 17, ) de otra parte de la red no sean excesivos ( el
datum aproxima al geoide ) y de manera que wt = w¿ = w3=o ( Los ejes son paralelos ).
54 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Adicional mente para redes de extensión global requerimos
que xo = yo = z0 = o en cuyo caso el datum es llamado " datum geocéntrico
De otra manera es un " datum local "
El problema de aproximación al geoide puede ser ignorado
en cuyo caso los valores
No = Co - r)o~o
son asignados, lo que fuerza al elipsoide a intersectar y a
ser tangente al geoide en el punto inicial.
El geoide puede ser aproximado de dos maneras: Por la
elección de valores de ( a; b; No, £of ) de manera que los va-
lores de ( ) o los valores de N* de la red sean minimi-
zados ( Vanicelv 1972 ).
Note que los valores de ( N*, £17 ) son disponibles a través de la red solamente si existe ya alguna red ajustada, cu- yos puntos mejoren la naturaleza iterativa del establecimiento del
datum. Un datum mejor ajustado puede lograrse sólo como un
mejoramiento a un datum previamente establecido .
El método clásico de " asegurar " que los ejes de simetría
son paralelos es forzar la " condición de azimut de Laplace " en
el punto inicial, esto es asignarle valores a a o de acuerdo a:
Sao 1 A o — a o = tj o tan f 0 2 — 44
Donde Ao es un azimut astronómico observado. Esta con- dición forza a los meridianos astronómicos y geodésicos a ser
paralelos en el punto inicial y entonces forza a ambos ejes de si- metría a descansar en este plano común. Sin embargo los ejes
de simetría pueden no obstante estar desalineados en el plano me-
ridiano.
La solución a este dilema ha sido aplicar la condición de La- place a muchos meridianos geodésicos paralelos a su correspondien
te meridiano astronómico.
55 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
En esencia, esto obliga a " la red ajustada " a compen-
sar por des alineamiento del datum, en vez de asegurar que el eje menor del datum es paralelo al eje de rotación de la tierra.
Note que forzando la condición de Laplace para todos los puntos
en la red presume la existencia de una red ajustada cuyos nuevos
puntos mejoran la naturaleza iterativa del establecimiento del da- tum.
2.3.3. EL DATUM NORTEAMERICANO.
La naturaleza iterativa del establecimiento de un datum es ilustrado por la Historia del Datum Norteamericano.
Hacia el final de la última centuria las redes geodésicas existían en muchas partes de Norteamérica.
Cada una definida sobre su propio datum. El mayor de ellos fue el Datum de Nueva Inglaterra establecido en 1379 con
su Punto Inicial en Principio, Maryland. El Datum de Nueva Inglaterra uso el elipsoide de Clarke en 1866, usado hasta la fe-
cha por el Datum Norteamericano.
Alrededor de 1899 fue completada la Red Transcontinental de Estados Unidos eslabonando las Costas del Atlántico y del Pa-
cifico.
Cuando se hizo el intento de unir las nuevas redes con las
del Datum de Nueva Inglaterra ocurrieron grandes discrepancias. Por esto en 1901 fue establecido el Datum Standar de los Estados Unidos. El elipsoide de Clarke de 1866 fue retenido del datum
de Nueva Inglaterra, pero el punto inicial fue movido de Principio
al centro geográfico aproximado de los U.S.A. en Meades Ranch, Kansas. Las coordenadas y el azimut de Meades Ranch fueron seleccionados de manera que causan un cambio mínimo en las coor - denadas existentes y en las publicaciones ( Principalmente en Nue-
va Inglaterra ) proveyendo un mejor acuso al geoide para el resto
del continente.
56 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Entre tanto redes adicionales fueron estableciéndose en los
U.S.A., Canadá y México. En 1913 Canadá y México acce- dieron aceptar a Meades Ranch como el punto inicial para to-
das las redes Norteamericanas y el datum fué renombrado co-
mo Datum Norteamericano.
Esto eventualmente condujo a un ajuste, entre 1927
y 1932, de todas las redes Norteamericanas existentes. Las coordenadas de 1901 del Meades Ranch y el elipsoide de Clar-
ke de 1866 permanecieron inmovibles, sin embargo el valor del azimut geodésico fué modificado en 5 seg. de arco ( Mitchells
1948 ).
Entonces el Nuevo Datum fue llamado el Datum Nortea -
mericano de 1927.
La definición del Datum Norteamericano de 1927 no fue muy completa. Fue solamente en 1948 que fueron observadas en Meades Ranch, las coordenadas astronómicas, permitiendo
especificaciones de los valores para £o , 170 . El paráme-
tro final del datum fue definido en 1967 cuando el Servicio de 41f. Mapas de la Armada de U.S.A., eligió un valor de NQ= 0 para Meades Ranch para su geoide astrogeodésico ( Fisher, 1967 ) La tabla 2-1 enlista los valores asignados a los parámetros
del datum para el Datum Norteamericano y las fechas en que ellos fueron determinados.
Desde el reajuste de 1927 muchas redes nuevas han sido
sumadas para demostrar su confianza. Sin embargo estas nue-
vas redes han sido ajustadas a redes ajustadas previamente que más tarde son consideradas fijas en el proceso. Hasta el ad
-venimiento reciente de computadoras digitales de gran capacidad
fue impractico considerar reajustar todas las redes en el con tinente, consecuentemente se han arrastrado distorsiones en las redes.
Un caso notorio es una discrepancia de 10 m la cual ha
sido " ahogada " en el Lago Superior " por acuerdo internacional"
El tiempo se aprovechará mejor cuando ocurran nuevos reajustes masivos y quizá, redefiniciones del Datum Norteamericano ( Smith 1971 ).
Un avance de este programa es el Simpiosio Internacional
sobre problemas relacionados a la re definición de las redes geo- désicas Norteamericanas de Mayo de 1974 en la Universidad de New Brunswick.
57 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

PARAMETROS QUE DEFINEN AL DATUM NORTEAMERICANO
DE 1927.
Se mi eje Mayor del Elipsoide de
Clarke de 1866
Semi eje menor del elipsoide de
Clarke de 1866
a= 6378206. 4m
b= 6356583.8m
F echa de
Adopción
1879
Latitud del Punto Inicial en
Meades Ranch. Longitud del Punto Inicial en
Meade's Ranch.
cp = 39° 13'26". 686 N
X0 = 98° 32130 .506 W
1901
Azimut del Punto Inicial ( hacia
Waldo ) eioi = 75° 28' 9".64 1927
( en el sentido de las manecillas
del reloj; a partir del sur ).
Componente Meridiana de la Desviación en el Punto Inicial. £0 =-1.02"
Componente en el Primer Vertical de la Desviación en el Punto Inicial. 170 =-1.79"
Altura Geoidal en el Punto Inicial. N* = 0
1948
1967
TABLA 2-2
COMPONENTES DE TRANSLACION
*0 y0 zo
cr *0
a yo
cr Zo
-28.7 150.5 179.9 1.7 1.0 1.2
-35 164 186 2 3 3
Autores
Merry y Vonicek
Krakiwsky etal.
58 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
El Datum Norteamericano es un datum local, esto es su
centro geométrico no coincide con el origen del sistema Te--
rrestre Promedio. Por causa de las distorsiones en las re- des antes mencionadas las determinaciones de Xo; Yo; Zo; va-
rían dependiendo de las localizaciones en las cuales ellos fue -
ron medidos. Dos conjuntos de valores recientes obtenidos -
por métodos diferentes son enlistados en la Tabla 2-2«Merry y Vanicek ( 19 73 ) usaron datos dentro de 1000 Km de Mea des
Ranch. Krakiwsky et al,( 1973 ) usaron datos de New Bruns^
wich y Nueva Escocia. Las discrepancias del orden de 10 m fácilmente reflejan las distorsiones que existen en las presentes redes Norteamericanas.
2.3.4. TRANSFORMACIONES DE DATUM.
Si son dadas las coordenadas curvilíneas de una estación -
de observación referidas a un datum particular entonces un pro-
blema que ocurre frecuentemente es obtener las coordenadas cur
vilíneas para la estación referida a otro datum.
Para la transformación de coordenadas de un datum a otro es necesario contar con dos puntos de partida:
a). - La localización de los centros geométricos de cada
elipsoide de referencia con respecto al centro de - gravedad de la tierra o con respecto al otro.
b). - La diferencia en tamaño y forma entre los elipsoi-
des.
Es considerado usualmente que los ejes de ambos datums son paralelos a los ejes del sistema terrestre promedio.
Considerando los elipsoides con tamaños y formas definidas por ( at,b| ) y { a2 , b2 ) o' (alternativamente ( a,.f, ) y
( a2l Í2 ) donde f= °qb ) y con la localización de los centros geo- métricos con respecto al centro de gravedad definida por:
(ro )i - Xo yo
Zo
(ro),= *0 yo
Zo
59
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
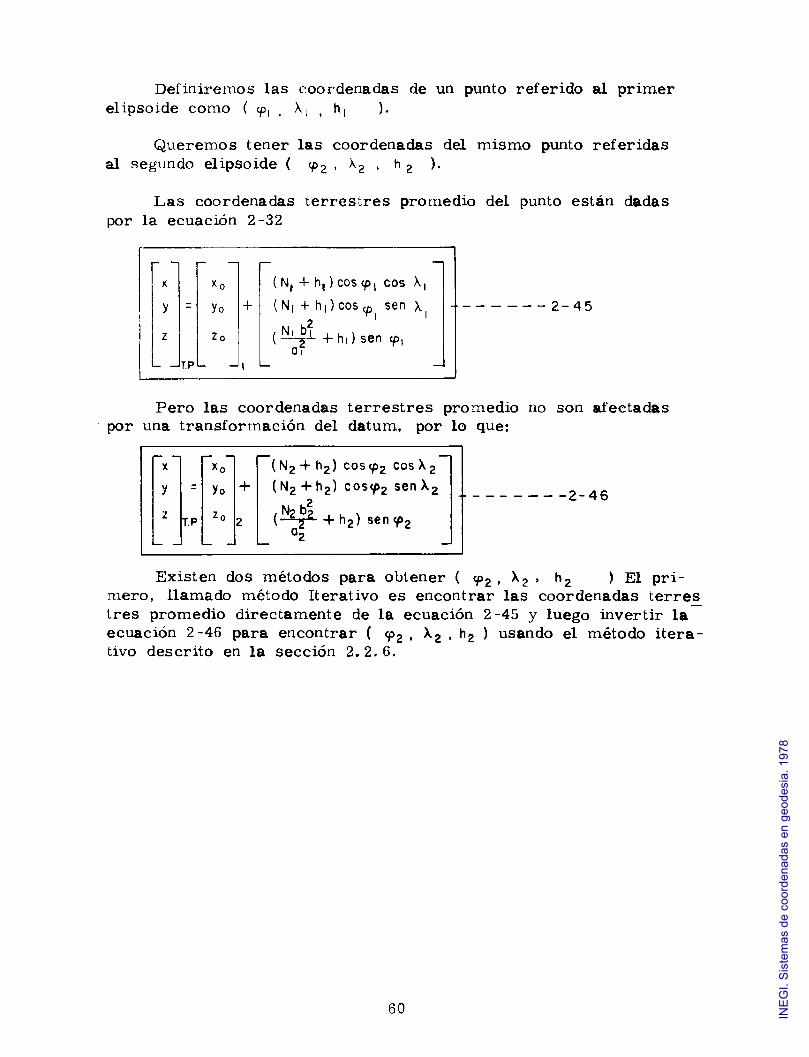
Definiremos las coordenadas de un punto referido al primer
elipsoide como ( <p, _ X, t h, ).
Queremos tener las coordenadas del mismo punto referidas
al segundo elipsoide ( cp2 , X2 , h 2 )•
Las coordenadas terrestres promedio del punto están dadas
por la ecuación 2-32
x
y
z
* o
y0
Zo
+
( N, + h,) eos cp, eos X,
( N| + h|) cos cp sen \ — — 2-4 5
N| -g1 4- hi) sen tp, Q i
■Jt.p
Pero las coordenadas terrestres promedio no son afectadas por una transformación del datum, por lo que:
>■0 (N2 4- h2) eos tp2 eos X2
Yo + ( N2 + h2) cos(p2 sen X2
T.P 4- h2) sen <p2 a2
2-46
Existen dos métodos para obtener ( <p2 , X2 , h2 ) El pri-
mero, llamado método Iterativo es encontrar las coordenadas terres
tres promedio directamente de la ecuación 2-45 y luego invertir la ecuación 2-46 para encontrar ( <p2 , X2 , h2 ) usando el método itera-
tivo descrito en la sección 2.2.6.
60 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
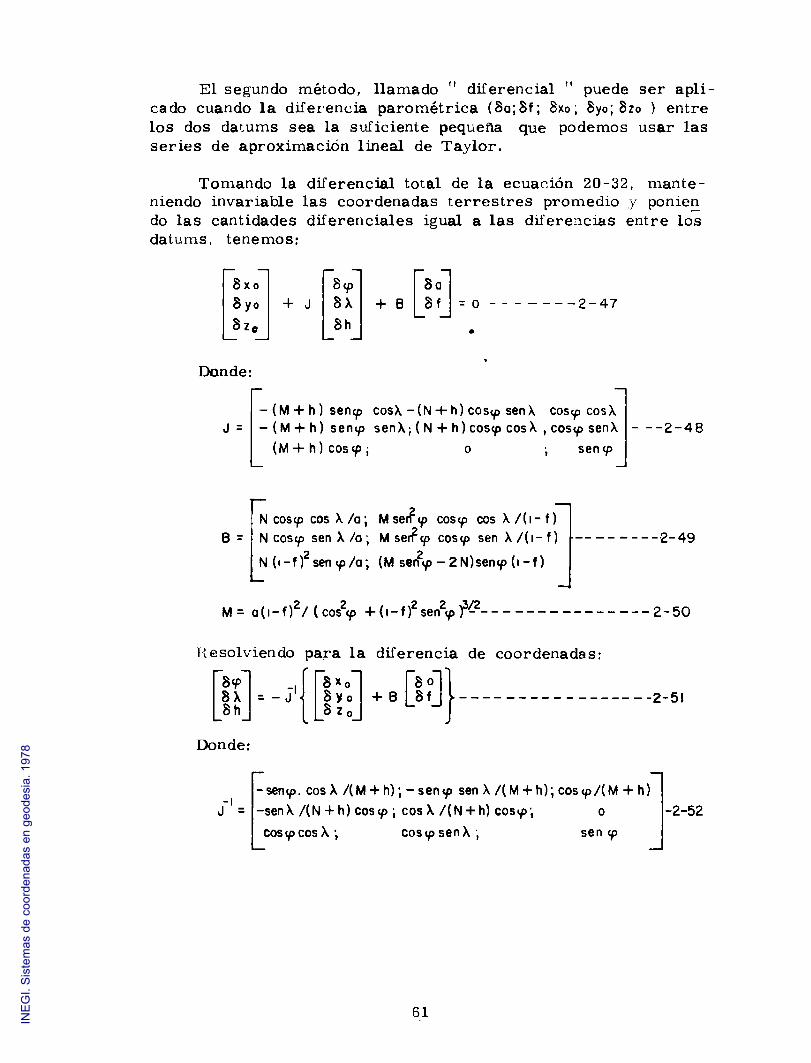
El segundo método, llamado " diferencial " puede ser apli-
cado cuando la diferencia parométrica (8a;8f; 8xo; Syo; 8zo ) entre
los dos datums sea la suficiente pequeña que podemos usar las
series de aproximación lineal de Taylor.
Tomando la diferencial total de la ecuación 20-32, mante- niendo invariable las coordenadas terrestres promedio y ponien
do las cantidades diferenciales igual a las diferencias entre los datums, tenemos:
8x0
8 yo
8z.
+ J
8 y
8 X
Sh
+ B
8a
8 f 0 - - 2 — 47
Donde:
J = -{M + h)seny cosX-(N + h) cosy senX cosycosX - (M + h) seny senX; ( N 4- h) cosy cosX , cosy senX
(M 4- h) cosy ¡ o ■, sen y
— —2 -48
B = N cosy cos X /a; M serf y cosy cos X /(1 - f)
N cosy sen X /a , M serf y cosy sen X /(1-f)
N (i-f f sen y/0; (M sen2y - 2N)seny (1 - f)
2-49
M- a(i-f)2/(cos2y + <i-f)2sen2y 2-50
Resolviendo para la diferencia de coordenadas:
8y 8 X Sh
Donde:
= - J1 8*o Syo 8 z 0
-2-51
J ' =
-seny. cos X /(M + h);-seny sen X/(M + h); cosy/(M + h)
-senX /(N + h) cosy ; cos X /(N + h) cosy , 0
cos y cos X ; cos y sen X , sen y
-2-52
61 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Note que las matrices pueden ser evaluadas en cualquiera de los dos sistemas de coordenadas, tomando en cuenta que la diferencia de las cantidades ha sido considerada pequeña. Aún, es razonable para simplificar la evaluación de las matrices usar
la aproximación esférica (F = o¡ N = M = N + h= M + h= a ) en cuyo - caso obtenemos las ecuaciones de transformación de Heiskanen
and Moritz ( 1967 ecuación 5 - 55 ).
La tabla 2-3 muestra un ejemplo de cálculos de transfor- maciones de datum. Este ejemplo particular transforma las
coordenadas de una estación en Dartmouth, Nueva Escocia del
Datum Norteamericano de 1927 ( Datum antiguo ) al Datum Eu-
ropeo de 1950 ( Datum nuevo ). Las componentes de transla- ción del datum usadas fueron dadas entonces por Lambeck (1971).
Fueron usados ambos métodos El Iterativo de las ecuaciones 2-45
y 2-46 y el diferencial de la ecuación 2-51. Las discrepancias
entre los dos resultados son de alrededor de 0.4 m en latitud,
0.3 m en longitud y 0.2 m en altura.
2.4 SISTEMAS T O PO C E N T R IC O S TERRESTRES.
En la Introducción quedó establecido que los sistemas topo-
céntricos terrestres están definidos como sigue:
a). - El origen está en un punto cercano a la
superficie de la tierra.
b). - El plano primario es el plano tangencial a la superficie de la tierra en ese punto.
c). - El eje primario es el punto norte. d). - Los sistemas son de mano izquierda.
Las dos últimas especificaciones no presentan problema. Sin embargo " La superficie de la tierra " puede ser interpretado
de tres maneras: La superficie física de la tierra, la superficie equipotencial de la tierra o la superficie de un elipsoi-
de de referencia.
62 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
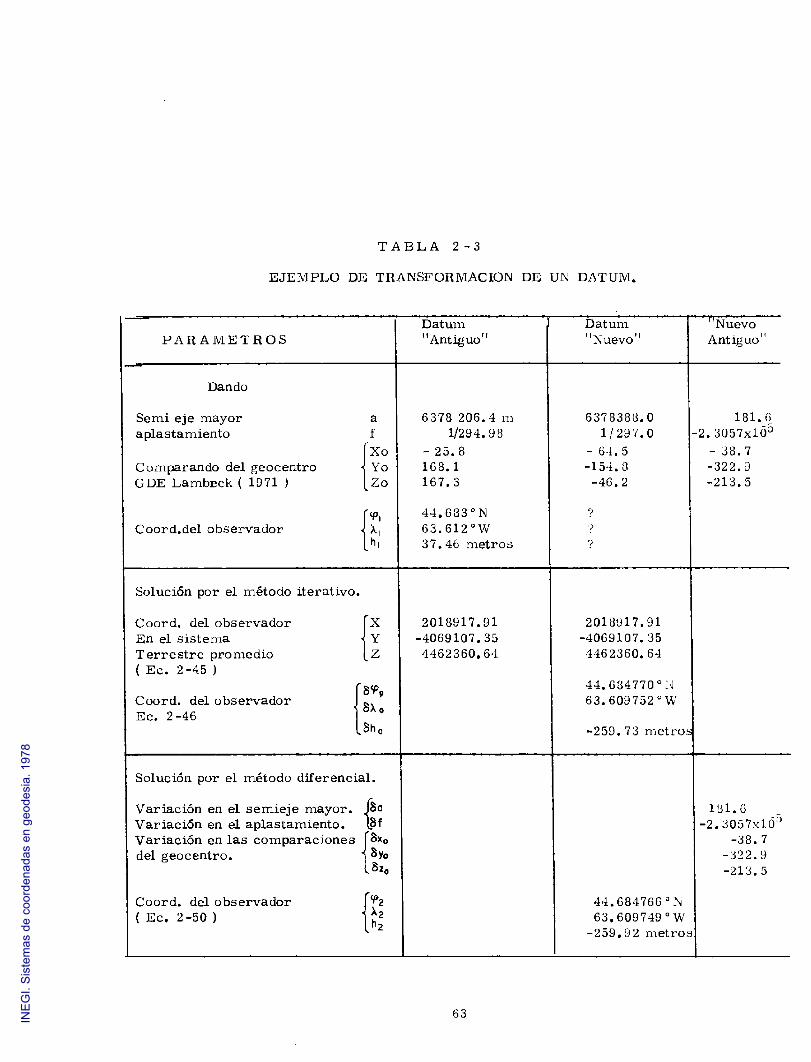
TABLA 2-3
EJEMPLO DE TRANSFORMACION DE UN DATUM.
PARAMETROS Datum "Antiguo"
Datum "Nuevo"
"Nuevo Antiguo"
Dando
Se mi eje mayor a aplastamiento f
ÍXo Comparando del geocentro < Yo GDE Lambeck (1971) [zo
í9' Coord.del observador i X, K
6 378 206.4 m 1/294.98
- 25. 8 168.1 167. 3
44.633 ° N 63. 612 °W 37. 46 metros
6 37 8388.0 1/297.0
- 64. 5 -154.8 -46.2
•> •>
181. 6 -2.3057xlÓ5
- 38. 7 -322.9 -213.5
Solución por el método iterativo.
Coord, del observador fX En el sistema < Y Terrestre promedio [z ( Ec. 2-45 )
f Coord, del observador J Ec. 2-46 SX°
Sh0
2018917.91 -4069107.35 4462360.64
2018917.91 -4069107.35 4462360.64
44. 684770° 1J 63.609752°W
-259. 73 metros
Solución por el método diferencial.
Variación en el semieje mayor. J&a Variación en el aplastamiento. l8f Variación en las comparaciones fSx0
del geocentro. "j Syo lSz0
Coord, del observador [^2 (Ec. 2-50)
44.684766 ÜN 63.609749 °W
-259.92 metros
181.6 -2.3057xl(P
-38. 7 -322.9 -213.5
63 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
No es práctico definir un sistema de coordenadas en términos de un plano tangencial a la superficie física de la Tierra. Sin embar-
go pueden ser definidas dos clases de sistemas de coordenadas topo céntricas terrestres: El sistema en el cual el polo primario es la
normal a la superficie equipotencial a la estación de observación es
llamado un " Sistema Astronómico Local El sistema en el cual
el polo primario es la normal del elipsoide que pasa a través de la estación de observación es llamado un " Sistema Geodésico Local "
( Krakiswky 1968 ).
2.4.1.- SISTEMA ASTRONOMICO LOCAL. -
Un sistema Astronómico local (A.L. ) está definido:
a). - El origen está en la estación de observación.
b). - El polo primario ( eje Z ) es la normal a la
superficie equipotencial ( vertical de la gravedad ) en la estación de observación. El plano primario
es el plano que contiene el origen y perpendicular
a la vertical de la gravedad. c). - El eje primario ( eje X ) es la intersección del
plano primario y el plano que contiene al polo te-
rrestre promedio y la estación de observación y es llamado " Norte Astronómico "
d). - El eje "Y" es dirigido al Este para formar un
sistema de mano izquierda.
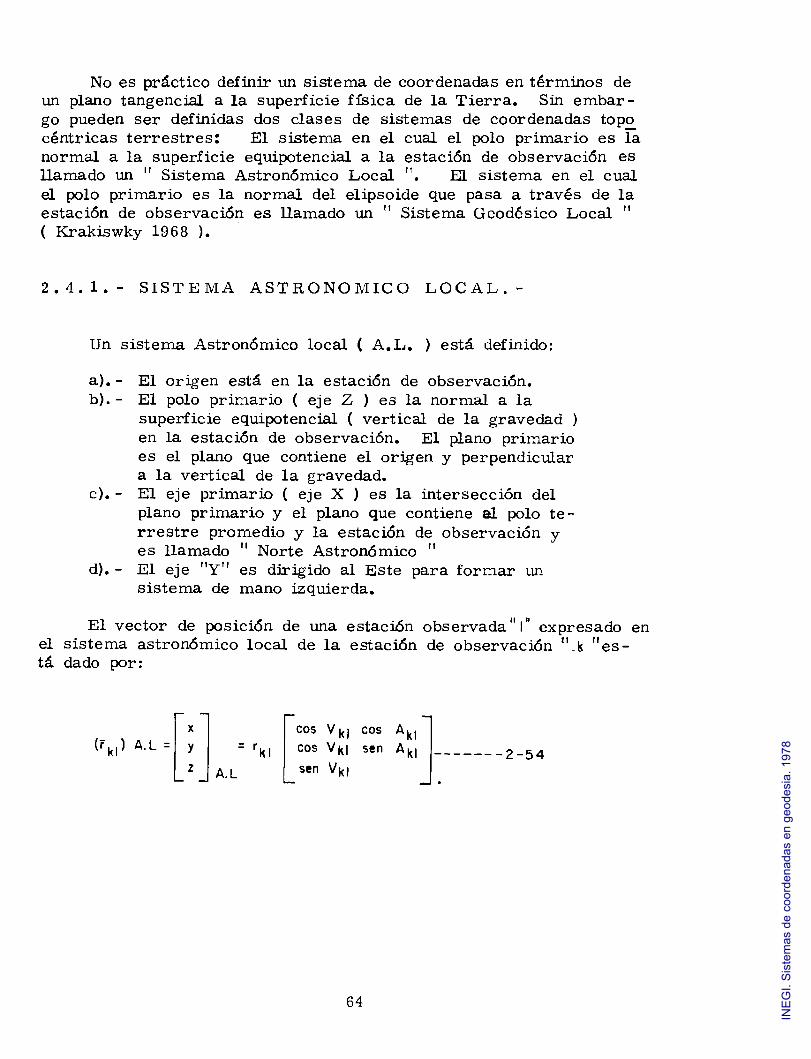
El vector de posición de una estación observada" l" expresado en el sistema astronómico local de la estación de observación "_k "es-
tá dado por:
(rk|) A.L = = r.
A.L
cos V cos A eos V|d sen A
kl
kl sen Vk|
2-54
64
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

FIGURA 2-12
SISTEMAS DE COORDENADAS GEODESICO Y GEODESICO LOCAL.
65
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Donde rk¡ es la distancia espacial terrestre, Vk| el
ángulo vertical y A^| el azimut astronómico.
Note que la relación del sistema astronómico lo^al al sis- tema terrestre promedio está dada por la latitud G>k y la lon-
gitud solamente después de que las cantidades observadas
, Ak, Ak¡ han sido corregidas por el movimiento polar. Entonces el vector de posición *rk| de 2-54 expresado en el
sistema terrestre promedio es:
T.P
X
y
z
R3 (180o- Ak ) R2(90°- <Dk) P2
T.P
X
y
z A. L
2-5 5
Donde la matriz de reflexión.
I 0 0 0-1 o 0 0 I
-2-56
Lleva a cabo la transformación del sistema de mano izquier- da al sistema de mano derecha, mientras que las matrices rota-
cionales
r2 ^
cos(90°-$k), 0 sen (90°-<&k)
0,1, 0
sen (90o- ^ ), 0 , eos (90° -$k )
2-57
Rt =
eos (180o- A k) , sen (180o- Ak) ■, 0
-sen (180o-A , cos(l80°-A k) ■, 0
0 : 0 ,1
2-58
Llevan los tres ejes del sistema astronómico local a los
ejes correspondientes en el sistema terrestre promedio.
La transformación inversa es:
(fkl>A.L = [R¡l|eo°-Akl "a (90°-í>k) P2] (fkl)TP--2-59
Pz Rz„-90°) *3 (A k - 180») ( r „|) i; P 2- 60
66
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Note que no tienen lugar traslaciones mayores. Tenemos
meramente rotado el vector de posición ( r ^ ) de la estación
" I " respectoa la estación " k " en el sistema terrestre pro-
medio. Si el vector de posición de la estación " k " respecto al centro de gravedad en el sistema terrestre promedio es ( Rk )
T. P entonces el vector de posición total R| de la estación
" I " con respecto al centro de gravedad en el sistema terrestre
promedio está dado por:
(R|)j.P = (Rk)T p+(f Itlíl.p - 2-61
Los vectores unitarios Mx, My, P z , dirigidos a través de
los ejes del sistema astronómico local tienen las componentes si-
guientes, en el sistema terrestre promedio:
£x =R3 (I804- A) Rz (90£<3>)P2 0
0
/*x
-sen<3> cos A - sen<f> sen A
eos 0 2 62
n =R3(I80°-A) R2(90o-4>) P2 I ' " n
2-6 3
jlz = R3{I80°-A) R2(90o-$) P2
0 0
1
H-z
cos$ cos A cos$ sen A
sen $ 2-64
67
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
El sistema de coordenadas astronómicas locales es único, para cualquier punto de observación. Por este hecho, este sis-
tema es la base para el tratamiento de las mediciones terrestres tridimensionales en muchas estaciones, puntos en una solución
única.
2.4.2.- SISTEMA GEODESICO LOCAL.
Un sistema geodésico local ( G.L. ) está especificado (ver
Fig. 2-12):
a). - El origen se apoya en la normal elipsoidal que pasa por la estación de observación. Note que en principio el origen puede apoyarse en cual-
quier lugar de la normal elipsoidal. En la prᣠtica la elección se hace de manera que quede en la estación de observación; en el elipsoide o en la
intersección de la normal elipsoidal con el geoide.
b). - El polo primario ( eje Z ) es la normal elipsoidal.
El Plano primario es el plano que contiene el ori- gen y es perpendicular al polo primario.
c). - El eje primario ( eje X ) es la intersección del plano primario y el plano que contiene al semi eje
menor del elipsoide y el origen, y es llamado " Nor te Geodésico ".
d). - El eje " Y " es dirigido hacia el Este para formar un sistema de mano izquierda.
68
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Las transformaciones entre los sistemas astronómicos local
y geodésico local que comparten un origen común pueden expre-
sarse en términos del ángulo entre la normal del elipsoide y la
vertical de la gravedad ( Desviación de la vertical ) y el ángulo
entre el norte geodésico y el norte astronómico. Dadas las componentes meridianas y del primer vertical de la desviación
£ y r¡ respectivamente y los azimut geodésico y astronómico
a , A para un punto particular, entonces su vector en el
sistema astronómico local es transformado en un vector en el sistema geodésico local por:
(rK|) G.L = Rj ( A- a) R2(-£) R,( rj) <7k|) AL 2-65
Note que el orden en el cual las rotaciones son permitidas en este caso no es importante, desde que los ángulos 17 »
(A-a ) son relativamente pequeños sus matrices de rotación pue- den considerarse que conmutan. Note también que si la condición de Laplace es forzada en el origen de esos siete mas locales, tene-
mos:
A - a = (A - X.) sen = 77 tan 9 .
Si el origen no está en la estación de observación el vector
de posición Rk en 2-61 podría referirse al origen, no a la esta- ción de observación. Esto es para un punto en el geoide, el cálcu-
lo de ( Xk , Yk , Zk ) es hecho de ( , X^ , Nk ) (ondula- ción geoidal ) mientras son usados ( yk , X k , 0 ) sobre el elipsoi
de.
Note que cuando una región pequeña de la Tierra es tomada co- mo un plano está implicado un sistema geodésico local.
Similar a las ecuaciones 2-54 y 2-55 el vector de posición de la
estación de observación k a la estación observada I , está dada
por:
(7kl>GL = = r kl
G.L
eos eos sen o
■K kl
cos a sen a kl 2-66
69
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

lr ki ^G. = R3(I80°- Xk )R2(90°-9k )P2
G.
2-67
G, L.
Donde { a, a , r ) son altitud geodésica, azimut y rango, y
( tp f X ) son la latitud y longitud geodésica. Note que el
sistema geodésico ( G ) y el sistema terrestre promedio (T.P.)
están relacionados por la ecuación 2-4.
Donde ( Xo, Yo, Zo ) son las componentes de traslación del origen del sistema geodésico en el sistema terrestre prome-
dio.
Las correspondientes vectores unitarios, a los tres ejes
cartesianos en el sistema geodésico local son
H-
-sen<p cos X -seníp sen X
eos cp 2-68 a
-sen X cos X
o 2-68 b
cos cp cos X costp senX
sen </>
.2-680
70
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

2 . 5 SUMARIO DE SISTEMAS TERRESTRES.
En este capítulo tenemos definidos precisamente cinco sis-
temas de coordenadas terrestres especificas. -
a).- Terrestre promedio ( T. P. )
b). - Terrestre Instantáneo ( T.I. )
c). - Geodésico ( G )
d). - Astronómico Local { A. L. )
e). - Geodésico Local ( G. L. )
De los cuales los 3 primeros son geocéntricos y los últimos
dos topocéntricos.
La table 2-4 sumar iza los planos polos y ejes que definen esos sistemas.
Tenemos definidas precisamente cuatro clases de coordena-
das.
a).- Cartesianas ( X, Y, Z ) usadas en todos los sistemas.
b). - Curvilíneas ( i/>, \ , h ) usadas en el sistema Geodésico.
c). - Curvilíneas ( V, A, r ) usada en el sistema Astronómico
Local. d). - Curvilínea ( a, a , r ) Usada en el sistema Geodésico Local.
Finalmente tenemos definidas las transformaciones principales
entre estos sistemas de coordenadas y coordenada. La Fig. 2-13 enlista los números de ecuaciones que definen estas transformacio- nes las cuales son tabuladas en la tabla 2-5 .
71 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

TABLA 2 4
.POLOS DE REFERENCIA, PLANOS Y EJES QUE DEFINEN A LOS SISTEMAS DE COORDENADAS TERRESTRES.
1 ' Polos de Referencia Planos de Referencia Sistema
de Mano Sistema P r i rn ario
{ Eje Z )
Secundario
( Eje X )
Primario
( _1_ al polo primario).
Secundario
Terrestre
Promedio
Polo terrestre
Promedio (OIC)
(D Oi rt> o
Ecuador te ~
rrestre pro - medio que -
contiene al - centro de gra
vedad.
Meridiano Medio de
Greenwich.
Derecha
Terrestre
Instantáneo
Polo terrestre
Instantáneo
o o* 3 PL
i—' O
Ecuador te -
rrestre instan táneo.
Meridiano Medio de Greenwich
Derecha
Greodésieo Semi eje menor
(paralelo al eje
terrestre ).
T3 ' P O en
"O h-1' 5
Paralelo al Ecuador te -
rrestre pro- medio.
Paralelo al
Meridiano
Medio de
Greenwich
Derecha
Astronómico Local.
Vertical de la -
gravedad en la estación
0 CO
<< Cfi a>
Horizonte
local.
Meridiano
Astronómico
de la esta-
ción.
Izquierda
Geodésico
Local
Normal Elipsoi
dal en la esta-
ción
c D a P> 3. o w
Plano tangen
te. Coincidente con el meri
diano geodé- sico de la
estación.
Izquierda
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

F IG . 2 - 13
ECUACIONES QUE RELACIONAN A LOS SISTEMAS
TERRESTRES.
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Tabla 2-5
TRANSFORMACIONES ENTRE LOS SISTEMAS DE COORDENADAS.
SISTEMA ORIGINAL
in
w 1-3 M
>
k-4 Z
Terrestre Promedio
Terrestre
Ins tant^no'
Geodésico
Astronómi-
co Local.
Geodésico Local.
Terrestre Pj omcdio
X
Y Z '.P
Hl(Yp) Rg(Xp)
Xo Yo V.r.
P2R2( <& - 90^
R, ( Á - 180=)
Terrestre
Instantáneo
R2(-X^tl
(-Yp)
X
Y
ZJT.I.
Vía Terrestre
orcnrrJio
Vía Geodésica
Vfa Terrestre
promedio
Vía Terrestre
promedio
Geodésico
Xo Yo
Zo
Vía
Terrestre promedio
X
Y Z O
Vía
Geodésico Local
Astronómico Local
Rg (180 0 - A )R2 (90
-$ ) Po
V ía Terrestre pro me dio
Vía Geodésico
Loo di
I X
I Y ! ! Z I A.L
P2R2 (cp - 90 <)
Rg( X -180°) P-! ( - V ) r2( £ )
Geodésico Local
Vía Geodésica
Vía
Geodésica
R3( 180 X ) R2
(902 - 9 ) Pg
R2(+£) Ri(+ v )
x
Y
Z G.L.
NOTA: A y <t> han sido corregidas por
movimiento polar.
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
3. - SISTEMAS DE COORDENADAS CELESTES.
Los sistemas de coordenadas celestes son usados para defi-
nir las coordenadas de cuerpos celestes tales como las estrellas. La distancia de la tierra a la estrella más cercana es mayor de
10^ el radio de la Tierra, por lo que las dimensiones de la Tie- rra ( verdaderamente del sistema solar ) son frecuentemente des_
preciables comparadas con las distancias a las estrellas. Una segunda consecuencia de estas grandes distancias es que, no obs_
tante que las estrellas mismas están ciertas de estar moviéndose a velocidades cercanas a la velocidad de la luz, a un observador
sobre la tierra este movimiento es percibido como muy pequeño: muy raramente excede de un segundo de arco por año.
Por lo tanto la relación entre la tierra y las estrellas pue
de ser fuertemente aproximada considerando a todas las estrellas equidistantes de la tierra, sobre la superficie de la esfera celeste,
cuya dimensión es tan grande que la tierra ( y el sistema solar
inclusive ) puede considerarse como un punto sin dimensiones en el centro. Aunque este punto pueda ser sin dimensiones las rela- ciones entre direcciones sobre la tierra y en el sistema solar pue den ser extendidas a la esfera celeste.
El eje le rotación de la tierra es prolongado hacia afuera hasta intersectar a la esfera celeste en el " Polo Norte Celeste "
(P.N.C. ) y en el Polo Sur Celeste (P. S.C. )
El plano ecuatorial de la tierra es extendido hacia afuera hasta inters ectar a la esfera celeste en el " Ecuador Celeste "
75
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
La vertical de la gravedad a una estación sobre la Tierra es prolongada hacia arriba hasta intersectar la esfera celeste en
el " Cénit " ( Z ) y hacia abajo hasta intersectar en " Nadir " ( N ). El plano de la órbita de la Tierra alrededor del sol
( el plano eclíptico ) es extendido hacia afuera hasta intersectar a la esfera celeste en la 11 Eclíptica La línea de intersec- ción entre el plano ecuatorial de la Tierra y el plano eclíptico
es extendido hasta intersectar a la esfera celeste en el " Equi-
noccio Vernal o primer punto de Aries y el Equinoccio de Otoño" El equinoccio vernal es denotado por el símbolo TP y es el punto
en el cual el sol cruza el ecuador celeste de Sur a Norte.
Hay dos diferencias fundamentales entre los sistemas celes-
tes y los sistemas terrestres u orbitales. La primera en los
sistemas de coordenadas celestes son consideradas solamente las direcciones y no las distancias. En efecto esto significa que la
esfera celeste puede ser considerada como la esfera unitaria y to-
dos los vectores relacionados con ella son vectores unitarios.
La segunda diferencia está relacionada con la primera, en que la geometría celeste es esférica en vez de la elipsoidal en los sist«e
mas terrestres y orbitales, lo que simplifica las relaciones matemá ticas involucradas.
Como se discutió al principio hay cuatro sistemas de coordena das celestes principales llamados: La Eclíptica; Ascención Recta,
Angulo Horario y Horizonte. Algunas veces el sistema de ascen- ción recta y el del ángulo horario son referidos colectivamente como
sistemas ecuatoriales. Comenzaremos este capítulo con la discu-
sión de cada uno de estos sistemas siguiendo su orden.
Notamos anteriormente que la esfera celeste es solamente una aproximación de las relaciones verdaderas entre las estrellas y un
observador sobre la tierra.
76
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Por lo tanto, como en todas las aproximaciones, hay un
número de correcciones que deben hacerse para representar
precisamente la relación verdadera. Estas correcciones re- presentan los hechos de que las estrellas no son puntos esta-
cionarios en la esfera celeste, sino que se están moviendo real
mente ( movimiento propio ). El eje de rotación de la tierra no es estacionario respecto a las estrellas ( precesión y nutación ).
La Tierra está desplazada del centro de la esfera celeste
el cual está en el sol ( paralaje ). La Tierra está en movimiento alrededor del centro de la esfera celeste ( aberración ); y las di-
recciones medidas a través de la atmósfera de la Tierra, están
afectadas por " Refracción
Todos estos efectos serán discutidos en la sección 3.5 en
términos de las variaciones en el sistema de la ascención recta.
3.1.- EL SISTEMA DE LA ECLIPTICA.
El sistema de la Eclíptica ( E ) está especificado como si- gue: ( ver Fig. 3-1 ):
a). - El origen es heliocéntrico ( en el centro del sol ).
b). - El plano primario es el plano de la eclíptica ( el plano de la órbita de la tierra) y el polo primario
(eje Z) es el polo norte eclíptico ( PNE ). c). - El eje primario ( eje X ) es el equinoccio vernal.
El eje "Y" es elegido para hacer el sistema de mano derecha.
El sistema de la eclíptica es el sistema celeste que más pa- rece inercial, que es fijo con respecto a las estrellas. Sin em-
bargo debido al efecto de los planetas sobre el sistema Sol - Tierra el plano de las eclíptica está rotando lentamente ( a 0 [' 5 por año ) alrededor de un eje de rotación que se mueve lentamente.
77
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
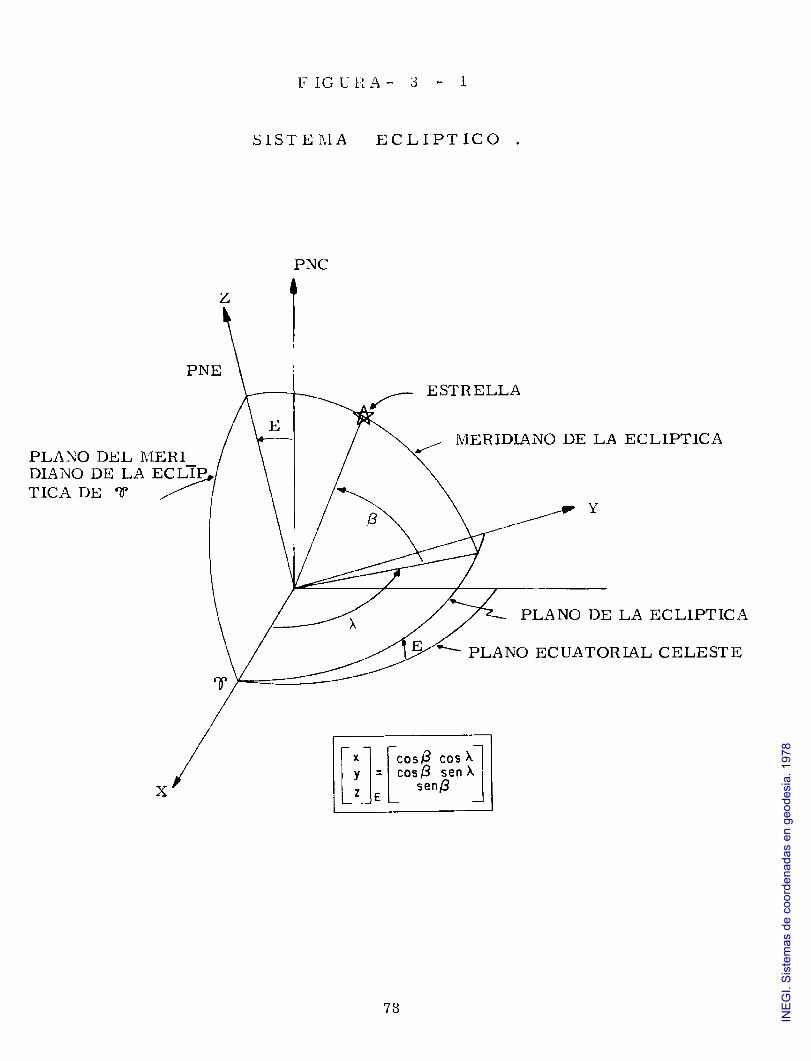
F IG U a A - 3 - 1
SISTEMA ECLIPTICO .
PNC
78
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
El "meridiano eclíptico" es el círculo máximo que contiene los
polos eclípticos y el cuerpo celeste en cuestión mientras que el me^
ridiano eclíptico " de *¡j» contiene el equicnocio vernal. La " lati
tud eclíptica " " /3 " es el ángulo de la eclíptica en el meridiano
eclíptico a la línea que conecta el origen con el cuerpo. " La Ion
gitud eclíptica X " es el ángulo del meridiano eclíptico del cuerpo
medido hacia el este, en el plano eclíptico desde el equinoccio ver- nal.
El vector unitario a un cuerpo celeste en el sistema celeste es:
x cos /9 cos X y = cos /3 sen X z sen /3
Y los ángulos están referidos a las componentes cartesianas por:
P = sen"1 z 3-2
X = ton ' 3-3
3.2.- EL SISTEMA DE LA ASCENCION RECTA.
El sistema de la ascención recta ( A.R. ) está especificado
como sigue: ( ver Fig. 3-2 ) :
a). - El origen es heliocéntrico.
b). - El plano primario es el plano ecuatorial y el
polo primario ( Eje Z ), el polo norte celeste
( PNC ). c). - El eje primario (eje X ) es el equinoccio vernal. d). - El eje "Y" es elegido de manera que haga un sis-
tema de mano derecha.
El sistema de la Ascención Recta es el sistema celeste más importante.
79 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

FIGURA 3-2
SISTEMA DE LA ASCENCION RECTA
PLANO COLURO EQUINOCCIAIT^
CIRCULO HORARIO
CUERPO CELESTE
PLANO ECUATORIAL CELESTE
A.R
cosS cos a cosS sena
sen 8
80
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Es en este sistema que están publicadas las coordenadas de
las estrellas y de los satélites, y sirve de conexión entre los sis_
temas terrestres, celestes y orbital.
El plano secundario contiene el polo norte celeste y el equi-
noccio vernal y es llamado el " Plano equinoccial coluro 'El cír- culo horario " es el círculo máximo que contiene los polos celes-
tes y el cuerpo en cuestión. La declinación 8 de un cuerpo es entonces el ángulo entre el ecuador celeste y una línea que une
al origen con el cuerpo. La " Ascención Recta "a es el ángulo
medido en el plano ecuatorial, hacia el este, desde el equinoccio vernal al círculo horario pasando a través del cuerpo en cuestión.
El vector unitario que describe la dirección de un cuerpo en el sistema de la ascención recta es:
x y =
_z Jar
cos S cos a cos 8 sen a
sen S 3-4
El sistema de la ascención recta es referido al sistema eclÍ£
tico por el ángulo agudo entre la eclíptica y el ecuador celeste lia
mado la " oblicuidad de la eclíptica " y denotada E.
Por lo que:
= Ri (-E)
A.R
3-5
3.3.- EL SISTEMA DEL ANGULO HORARIO.
El sistema del ángulo horario ( A.H. ) está especificado como
sigue: ( Ver Fig. 3-3 ).
a). - El origen es heliocéntrico.
b). - El plano primario es el plano ecuatorial.
81
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

FIGURA 3-3
SISTEMA DEL ANGULO HORARIO
Z
82 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
c). - El plano secundario es el plano del meridiano celeste del observador. El eje primario ( eje X ) es la intersección entre los planos ecuatorial y me-
ridiano celeste del observador. d). - El eje "Y" es elegido de manera que forme un
sistema de mano izquierda.
e). - El sistema del ángulo Horario gira con el obser-
vador.
El ángulo horario "h" es el ángulo medido hacia el este en el plano ecuatorial, desde el meridiano celeste del observa-
dor al círculo horario del cuerpo en cuestión. El ángulo m^e dido hacia arriba desde el plano ecuatorial a la línea dirigida
del origen hacia el cuerpo es la " declinación "
El vector unitario que describe la dirección de un cuerpo
celeste en el sistema del ángulo horario es:
A.H
cos 8 cos h eos 8 sen h
sen 8 3-6
Tenemos definidos, con esto, cuatro meridianos en la esfera
celeste:
El que contiene el equinoccio vernal ( El coluro equinoccial ) El meridiano de Greenwich; el que contiene al observador ( El me ridiano celeste ) y el que contiene a la estrella ( Círculo Horario). Fig. 3-4 muestra las relaciones entre estos meridianos.
Del equinoccio vernal medido en sentido contrario a las ma- necillas del reloj al:
a). - El meridiano de Greenwich es llamado el Tiempo Si-
deral de Greenwich. ( TSG ).
b). - El meridiano celeste es llamada Tiempo Sideral Local
( T.S.L.) c). - El círculo horario es llamado La Ascención Recta ( a )
83
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
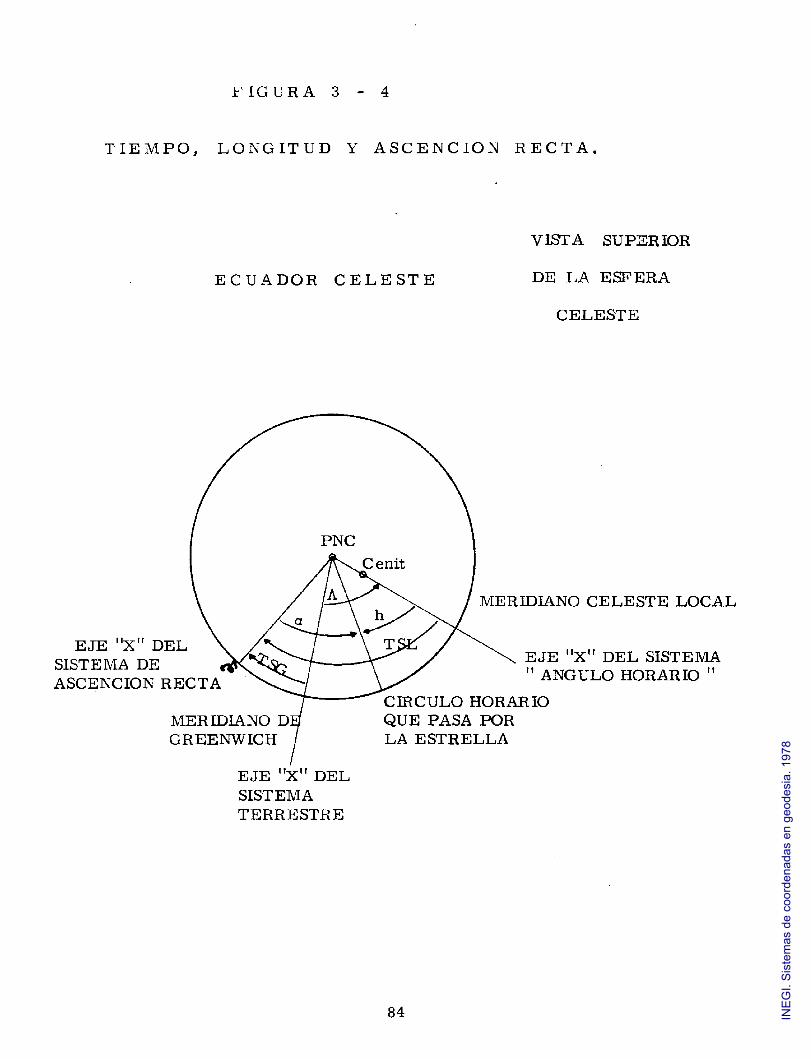
FIGURA 3 - 4
TIEMPO, LONGITUD Y ASCENCION RECTA.
VISTA SUPERIOR
ECUADOR CELESTE DE LA ESFERA
CELESTE
SISTEMA
TERRESTRE
84 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Del meridiano de Greenwich contado en sentido contrario de
las manecillas del reloj al meridiano celeste es llamado La Lon-
gitud Astronómica ( A ). Del meridiano celeste, medido en el
sentido de las menecülas del reloj, al círculo horario, es llamado
el ángulo horario ( h ) por lo que:
T.S.L. =T. S.G. + A 3-7
T. S.L. = h+ a 3-8
h = T. S. G. + A-a 3-9
El sistema del ángulo horario está referido al sistema de la ascención recta por el tiempo sideral local ( T.S.L. ) Esto es:
P2 R3 (T.S.L) A.H. A.R.
3.4.- EL SISTEMA DEL HORIZONTE.
El sistema del horizonte (H) está definido como sigue:
( Ver Fig. 3-5 ).
a). - El origen es heliocéntrico.
b). - El polo primario ( eje Z ) es el cénit del observador
( vertical de la gravedad ). El plano primario es el
horizonte del observador.
c). - El eje primario ( eje X ) es el punto Norte.
d). - El eje "Y" es elegido de manera que sea un sistema de mano izquierda.
El " Sistema del Horizonte " es usado para describir la posi- ción de un cuerpo celeste en un sistema peculiar de un observador
localizado topocéntricamente, similar al sistema astronómico local
descrito en el capítulo sobre sistemas terrestres. La diferencia principal es que el origen del sistema del horizonte es helicéntrico en lugar de topocéntrico.
85
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
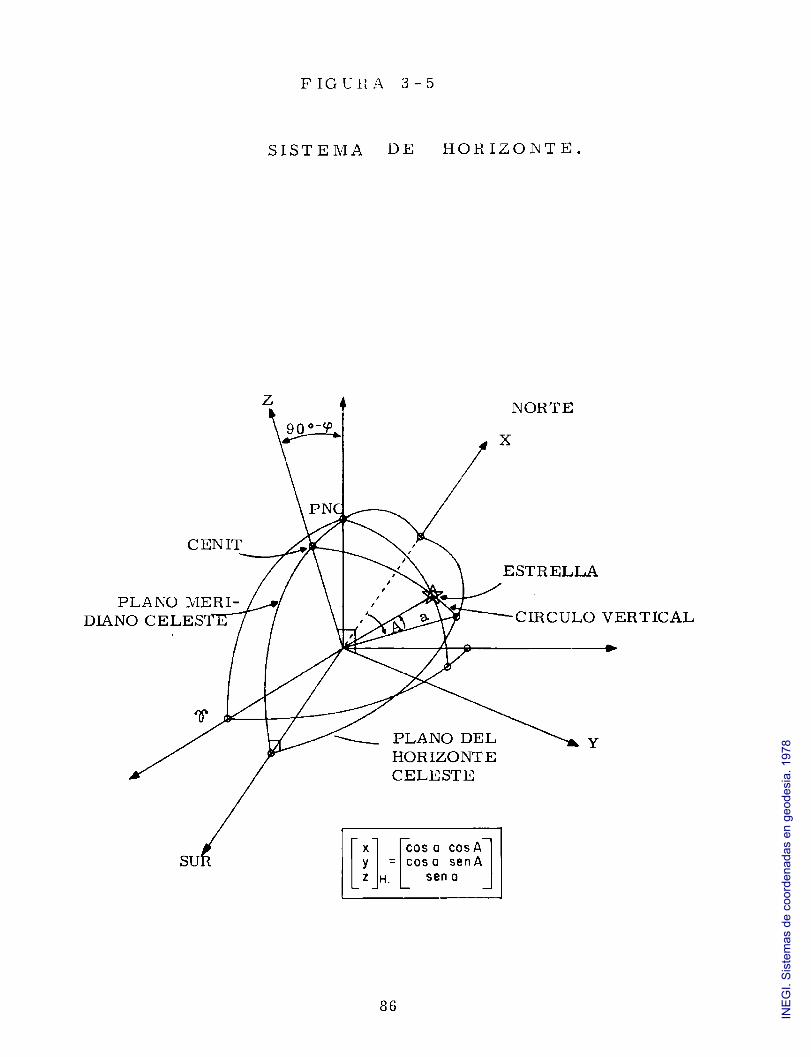
FIG UK A 3-5
SISTEMA DE HORIZONTE.
86
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
El círculo máximo que contiene al polo primario y el cuer- po celeste que está siendo observado es llamado el " Círculo Ver tical La localización de este círculo máximo está dada por
el " Azimut Astronómico " { A ) que es el ángulo medido en el sentido de las manecillas del reloj, en el plano del horizonte del norte al círculo vertical. La " altitud 11 ( a ) del cuerpo es el ángulo entre el plano del horizonte y la línea dirigida del origen
del sistema hacia el cuerpo. El vector unitario para un cuerpo
celeste en el sistema del horizonte es:
eos o eos A eos o sen A
sena 3 -11
El sistema del horizonte está referido al sistema del ángulo
horario por la latitud astronómica <j>
Esto es:
R3 (180°) R2 (90o- ¢) x y z AH
3-12
3.5.- VARIACIONES DEL SISTEMA DE ASCENCION RECTA.
Como se mencionó al principio de este capítulo, la aproxima- ción de la esfera celeste requiere correcciones para un trabajo pre
ciso. Estas correcciones son para: movimiento propio, precesión, nutación, aberración, paralaje y refracción y son aplicadas en cua- tro etapas entre el sistema en el cual son hechas las observaciones
actualmente ( El cual llamaremos el " sistema del lugar observado en la época T " ) y el sistema de ascención recta más absoluto
( El cual llamaremos el " sistema celeste medio en la época nor-
mal To. " ).
Consideremos estos sistemas en orden contrario, esto es:
87 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
a). - Sistema celeste medio a la époce normal To;
b). - Sistema celeste medio a la époce normal T;
c). - Sistema celeste verdadero a la época normal T; d). - Sistema del lugar aparente a la época T;
e). - Sistema del lugar observado a la época T.
Las conexiones entre estos cinco sistemas están mostradas en
la Fig. 3-6.
Los primeros tres sistemas están referidos por movimiento
en el sistema de coordenadas, mientras que los últimos dos están relacionados por efectos físicos que causan la variación de la po- sición del cuerpo celeste.
3.5.1.- PRECESION Y NUTACION.
La Tierra no es perfectamente esférica sino que tiene un
pandeo ecuatorial que es atraido por el sol, la luna y los planetas en forma asimétrica. Esto motiva que el eje de rotación de la
Tierra ( el polo norte celeste ) se mueva alrededor del polo norte eclíptico con un periodo de más de 25800 años y con una amplitud
igual a la oblicuidad de la eclíptica ( 23.5° ). Este movimiento es llamado 11 Precesión " y es similar a la precesión de una cabe za giroscópica ordinaria alrededor del vector de gravedad ( Mueller 1969, páginas 59-62 ).
La precesión no es asimismo un movimiento regular porque la órbita de la Tierra no es circular y la órbita de la luna no está en el plano eclíptico y tampoco es circular. Por lo que, los efec:
tos sumados del sol y de la luna están cambiando constantemente
a la vez que cambia su configuración.
Las irregularidades en la precesión son llamadas " nutación "
y para el polo celeste tienen su período de cerca de 18.6 años y una amplitud máxima de cerca de 9". La irregularidad sumada
debido al cambio de configuración de los planetas es llamada 11 Pre cesión Planetaria " y causa el movimiento muy lento del plano de
la eclíptica mencionado en la sección 3-1.
88
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Medio (a) To
Fig. 3-6
VARIACIONES DEL SISTEMA DE ASCENCION RECTA CELESTE.
89
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
En principio, la precesión existe solamente porque la Tierra
tiene un pandeo ecuatorial y existen la nutación y la precesión pla- netaria solamente porque existe la precesión.
La precesión y la nutación son mostradas esquemáticamente
en la Fig. 3-7
El ecuador celeste está definido como estando perpendicular al polo celeste, de manera que él también sigue la precesión y nu
tación del polo. El equinoccio vernal está definido como estando
en la intersección del ecuador celeste y la eclíptica de manera que
el seguirá tanto a la precesión y nutación del ecuador celeste y al movimiento de la eclíptica debido a la precesión planetaria4. Los
efectos son mostrados en la Fig. 3-8.
3.5.2.- SISTEMAS CELESTES MEDIOS.
Un sistema celeste medio ( C.M ) está definido como sigue:
a). - El origen está en el centro del sol.
b). - El polo primario ( eje Z ) es un polo en precesión { pero no en nutación ) que si-
gue la precesión del polo norte celeste y es llamado " Polo medio celeste 11
c). - El eje primario ( eje X ) es un eje en - precesión ( pero no en nutación ) que si-
gue el movimiento del equinoccio vernal debido tanto a la precesión del ecuador
celeste y a la rotación de la eclíptica y
es llamado " equinoccio medio vernal "
d).- El eje "Y" es elegido para dar un sis-
tema de mano derecha.
90
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
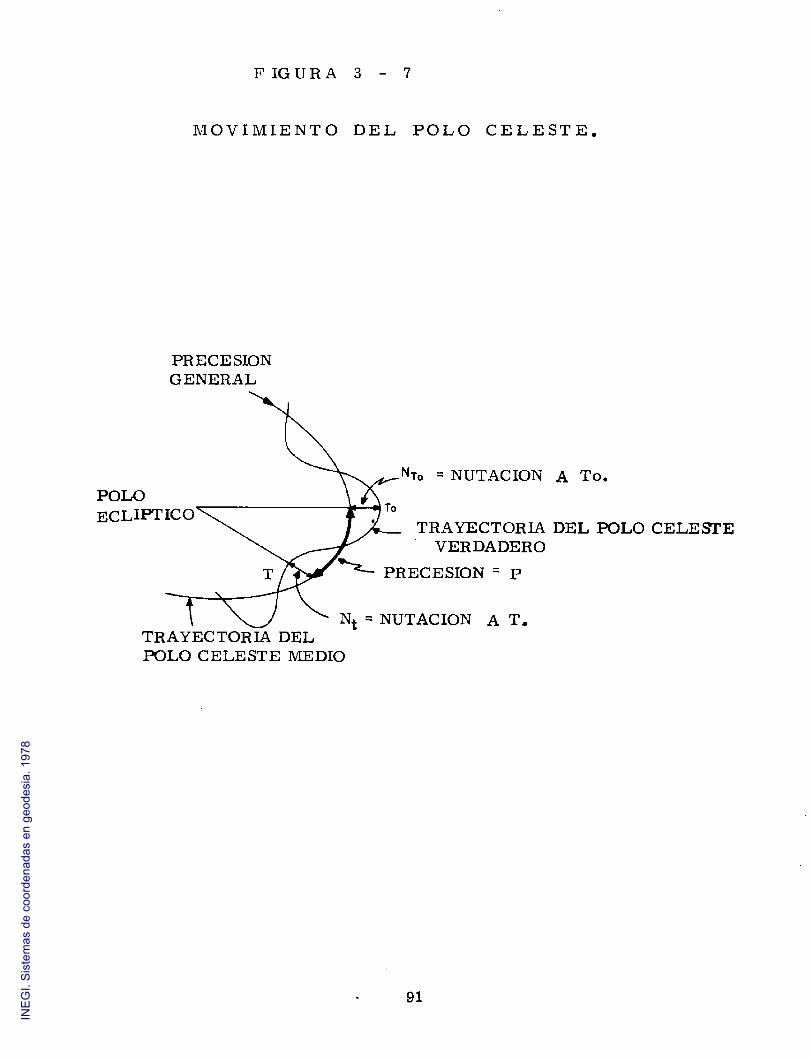
FIGURA 3 - 7
MOVIMIENTO DEL POLO CELESTE.
PRECESION
GENERAL
POLO ECLIPTICO
Nto = NUTACION A To.
TRAYECTORIA DEL POLO CELESTE
VERDADERO
TRAYECTORIA DEL POLO CELESTE MEDIO
PRECESION = P
Nt = NUTACION A T.
91
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
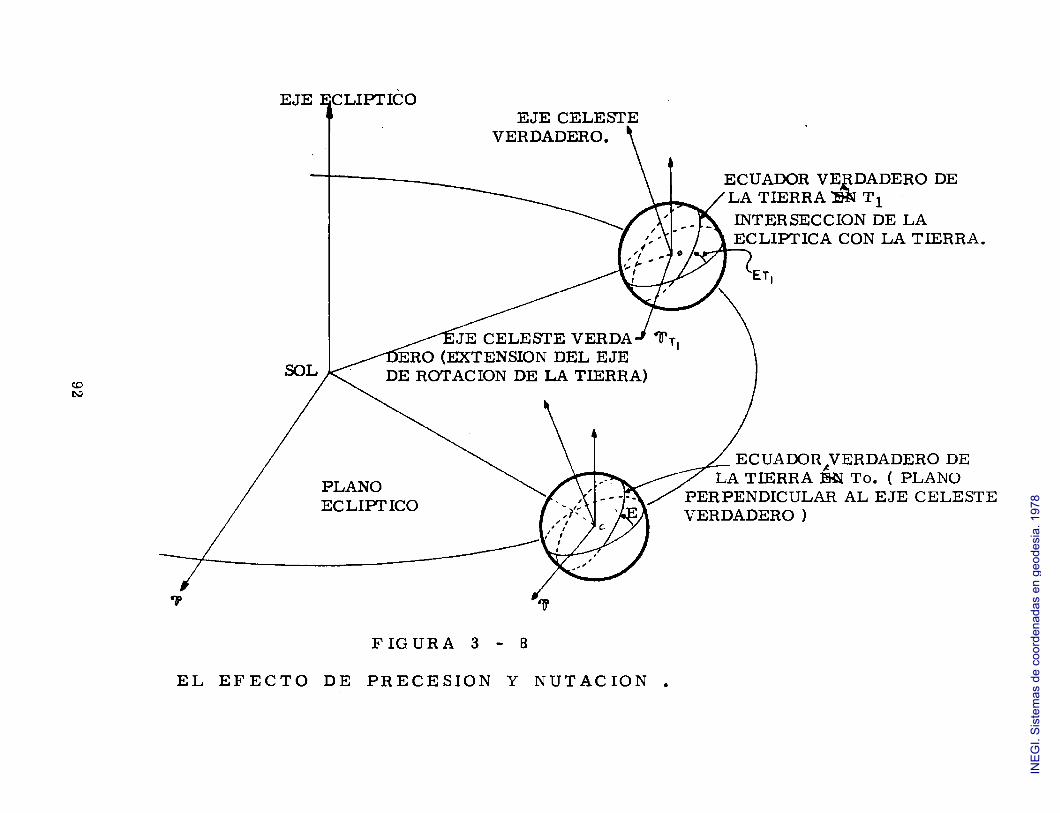
EJE ECLIPTICO EJE CELESTE
CD CO
ECUADOR VERDADERO DE LA TIERRA Bk
INTERSECCION DE LA
ECLIPTICA CON LA TIERRA.
ECUADOR^VERDADERO DE
LA TIERRA Bü To. ( PLANO PERPENDICULAR AL EJE CELESTE
VERDADERO )
FIGURA 3-8
EL EFECTO DE PRECESION Y NUTACION .
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Debido a que el sistema celeste medio está en movimiento
las coordenadas de cuerpos celestes ( ascención recta a y de-
clinación 8 ), varían con el tiempo. Por lo tanto, para ca-
da época del tiempo T, es definido un sistema celeste medio dife
rente. Ciertas épocas To han sido elegidas como " épocas nor-
males " a las que refieren coordenadas celestes medio tabuladas de cuerpos celestes. Las relaciones entre los sistemas celestes
medios de tiempos To y T están definidas usual mente en términos
de " elementos precesionales 11 ( ¿> 8 Z ) como se mués tra en la figura 3-9. Las expresiones para estos elementos como
una función del tiempo fueron derivadas hace como 70 años por
Simón Newcomb ( Mueller 1969 pág. 63 ).
Los ángulos ( 90°-(o ) y ( 90° + Z ) son las ascencio-
nes rectas de los nodos ascendentes del ecuador en T medidos --
respectivamente en los sistemas en To y en T.
El ángulo 9 es la inclinación del ecuador en T respecto al
ecuador en To. La transformación del sistema celeste medio en To. a uno en T está dado por:
= R3(-Z) R2(0 ) R3(-C«
C.M.T. C.M.T.o
■ — — 3-13
Independientemente del movimiento del sistema de coordena- das celeste medio debido a la precesión, cada estrella está cambian
do de posición debido a su propio movimiento. Ya que este movi-
miento propio es uniforme es más apropiado considerarlo en el sis- tema de ascención recta uniforme, que es el sistema celeste medio.
Las componentes del movimiento propio para cada estrella de
interés ( generalmente tabuladas como razones de variación en la ascención recta y declinación ) deben por lo tanto ser incluidas en
la conversión del lugar medio en To al lugar medio en T.
93
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

FIGURA 3 - 9
SISTEMAS DE COORDENA DAS CELESTE MEDIOS
PNC ( To)
PR EC ESION
= R3<-Z)R2(e)R3(-Co) C.M.T.
x y 2 C.M.T. o
94
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

.3.5.3.- EL SISTEMA CELESTE VERDADERO.
Un sistema celeste verdadero ( C.V.) está definido como
sigue:
a). - El origen está en el centro del sol.
b). - El polo primario ( eje Z ) es un polo en precesión y nutación que sigue la precesión y nutación del po
lo norte celeste, y es llamado el " Polo celeste —
c). - El eje primario ( eje X ) es un eje en precesión y nutación que sigue el movimiento del equinoccio — vernal debido a la precesión y nutación del ecuador
celeste y la rotación de la eclíptica y es llamado
el " equinoccio vernal verdadero "
d). - El eje "Y" es elegido para darnos un sistema de - mano derecha.
Como en el caso del sistema celeste medio, un diferente
sistema celeste verdadero está definido para cada época de tiempo
T. El sistema celeste verdadero a una época T difiere del sis- tema celeste medio a una época T solamente por el efecto de nu- tación y la relación está definida usual mente en términos de la " nutación " en longitud A ^ y " nutación en oblicuidad " A£
mostradas en las fig. 3-10. Las expresiones para estos dos -
elementos en función del tiempo, y otros parámetros fueron deriva-
dos por Woolard ( Mueller 1969 Pág, 69 ).
La transformación de un sistema celeste medio en T a un sistema
celeste verdadero en T está dada por:
verdadero "
x x y = R, (-£ -A() R3(-A<í0 R, (£ ) y — 3-14 z z
C.V.T. C.M.T.
95
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

FIGURA 3-10
SISTEMAS DE COORDENADAS CELESTE VERDADERO Y
CELESTE MEDIO.
PNC (Medio )
NUTACION .
x y z
= R, (-e-Ao R3(-A*)R,(e)
C.V.T
X y z
- jc.m.t
96
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
3.5.4.- EL SISTEMA DEL LUGAR APARENTE.
Un sistema de lugar aparente ( L.A ) está definido como
sigue:
a). - El origen está en el centro de la Tierra»
b). - El polo primario es paralelo al polo celeste verdadero.
c). - El eje primario es paraleto al equinoccio vernal verdadero.
d). - El sistema es de mano derecha.
Por lo tanto, un sistema de lugar aparente es un sistema
celeste verdadero con el origen trasladado del centro del sol al
centro de la Tierra. Esto significa que el origen ya no está en
el centro de la esfera celeste lo que motiva " Paralaje Anual"
y el origen está girando alrededor del centro de la esfera celes-
te verdadera lo que motiva " aberración anual " si la órbita de la Tierra es considerada como circular entonces la Tierra tiene una " constante de aberración "
K = cosec I = 20.4958 3-15
Donde v es la velocidad de la Tierra y c es la veloci dad de la luz; y el radio de la órbita de la Tierra subtendrá a
un ángulo diferente ir en cada estrella llamado " Paralaje
estelar " para esa estrella.
La estrella más cercana tiene una paralaje estelar de
0.76'
La ascención recta a y la declinación S de una estrella
expresada en el sistema del lugar aparente es entonces ( Mueller
1969 págs. 92 y 61 )
a S
L J L.A +
VCUOADEftO
Aap A 8 p
Aa A AS a —- — 3 ~ IS
Donde:
97
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
ÍAa p A Sp
Aa A
IA&A
cosa cos£ sec S - sen a cos X s sec 8 cos S sen £ sen X s - cos a sen S cos X s - sen a sen S cos £ sen X,
cosa cosXs cosC sec S+ sena sen X s sec 8 cosX 5 cos £ (tan£ cos 8 - sen a sen S ) + cos a sen 8 sen Xj
3-17
-3-18
y ( Xs ) es la longitud del sol; ( £ ) la oblicuidad de la eclíptica y ( a, S ) en 3-17 y 3-18 expresada en el sistema celeste
verdadero.
El hecho de que la órbita de la Tierra no sea circular
introduce errores del 1% en la ecuación 3-17 y arriba de 0.343" en la ecuación 3-18.
3.5.5. - EL SISTEMA DEL LUGAR OBSERVADO.
Un sistema del lugar observado ( L.O.) está definido como
sigue:
a). - El origen está en la estación de observación.
b). - El polo primario es paralelo al polo celeste verdadero.
c). - El eje primario es paralelo al equinoccio ver nal verdadero.
d). - El sistema es de mano derecha.
Por lo tanto, un sistema de lugar observado es un sistema de lugar aparente con el origen trasladado del centro de la Tierra a la estación de observación. Esto significa que el origen ya no
está en el centro de la Tierra, lo que causa " Paralaje geocéntri-
co " y el origen está girando alrededor del centro de la Tierra lo
que causa " aberración diurna ". En verdad, el efecto de la para
laje geocéntrica es siempre despreciable cuando se observan las es trellas. La " constante de aberración diurna " es :
V ji ** K = cosec I = 0.320/3 eos <p 3—19
98
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

donde v es la velocidad rotacional de la superficie de la Tierra;
c es la velocidad de la luz, p es la distancia radial del geo- centro al observador en las mismas unidades del radio de la Tie
rra y <p es la latitud geodésica del observador.
Hay un tercer efecto debido al hecho de que la Tierra es-
tá cubierta con una atmósfera de densidad óptica variable. Esto
causa un cambio complejo en la dirección del rayo de luz de una
estrella que depende del ángulo de incidencia. Mueller { 1969 pág. 103-109 ) discute esta " Refracción Atmosférica " en deta-
lle. La ascención recta y la declinación de una estrella en el
sistema del lugar observado es entonces:
LSJ L.O.
a
S +
LA
Aa o
ASp
Aa p
ABr -3-20
Donde:
A a D
A SD
= K cos h sec 8
sen h sen S ■3-21
Donde (h) es el ángulo horario de la estrella y (A ctR) ASR ) son las correcciones debidas a la refracción.
3.6.- TRANSFORMACION ENTRE LOS SISTEMAS DE COORDENADAS CELESTE APARENTE Y TERRES-
TRE PROMEDIO.
En ámbos sistemas de coordenadas: celeste aparente y te-
rrestre promedio tienen:
a). - Sus orígenes en el centro de gravedad de la Tierra.
b). - Sus polos primarios como el polo OIC, esto es, el polo terrestre promedio es paralelo al polo celeste
verdadero. c). - Ambos son de mano derecha.
99
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
La única diferencia entre los dos sistemas es que el eje primario del sistema celeste aparente es paralelo al equinoccio
vernal verdadero y el eje primario del sistema terrestre prome-
dio se apoya en el meridiano astronómico medio de Greenwich.
El ángulo entre estos dos ejes varía con la rotación de la Tierra y es llamado el Tiempo Sideral Aparente de Greenwich (T.S.A.G.)
Por lo tanto, la transformación del celeste aparente al terrestre promedio es ( ver Fig. 3-4 ).
= R {TSAG)
T.R y z
LA.
3-22
Para usar estas ecuaciones, requerimos algunos medios
de calcular (TSAG) desde el Tiempo Universal Solar usado para
transmisión del tiempo Standard. Describiremos dos métodos.
Primero, si ( TSAG ) es conocido para alguna época To del Tiempo Universal, entonces se puede calcular para cualquier otra época T, de la relación:
(TSAGMT) = TSAG (To) + we(T-To) 3-23
Donde se asumió que el tiempo sideral y el Universal están relacionados por una velocidad angular uniforme de la Tie-
rra.
We= 360.98565 grados / T.U. d£a =
4 .3752695 X 10 ^ Radianes/minuto 3-24
Esto no es precisamente cierto pero una diferencia res- pecto al método más preciso presentado es menor que 10"^ radia- nes { equivalente alrededor de 0.02 segundos de arco, 1 milise-
gundo o 1/2 metro a través del ecuador de la Tierra ), es intro- ducida si T-To es menor que un d£a.
100
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
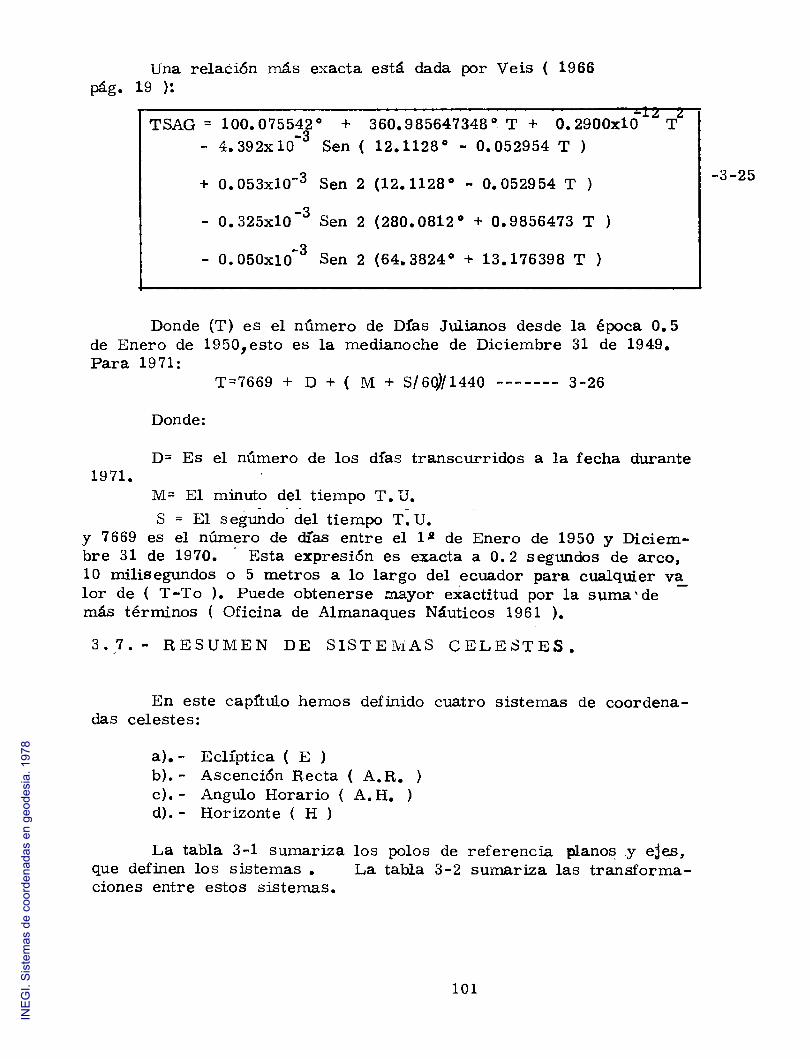
Una relación más exacta está dada por Veis { 1966
pág. 19 ):
TSAG = 100.075542° + 360.985647348° T + 0.2900x10
- 4.392x 10~3 Sen { 12.1128° - 0.052954 T )
+ 0.053x10-3 Sen 2 (12.1128° - 0.052954 T )
- 0.325x10"3 Sen 2 (280.0812° + 0.9856473 T )
- 0.050xl0~3 Sen 2 (64.3824° + 13.176398 T )
=T2—T
-3-25
Donde (T) es el número de Días Julianos desde la época 0.5
de Enero de 1950,esto es la medianoche de Diciembre 31 de 1949. Para 1971:
T = 7669 + D + ( M + S/6Cj)/1440 3-26
Donde:
D= Es el número de los días transcurridos a la fecha durante 1971.
M= El minuto del tiempo T.U.
S = El segundo del tiempo T.U. y 7669 es el número de días entre el Ia de Enero de 1950 y Diciem-
bre 31 de 1970. Esta expresión es exacta a 0.2 segundos de arco, 10 milis egundos o 5 metros a lo largo del ecuador para cualquier va
lor de { T-To ). Puede obtenerse mayor exactitud por la suma'de más términos ( Oficina de Almanaques Náuticos 1961 ).
3.7.- RESUMEN DE SISTEMAS CELESTES.
En este capítulo hemos definido cuatro sistemas de coordena- das celestes:
a). - Eclíptica ( E )
b). - Ascención Recta ( A.R. )
c). - Angulo Horario ( A.H. ) d). - Horizonte ( H )
La tabla 3-1 sumar iza los polos de referencia planos y ejes,
que definen los sistemas . La tabla 3-2 sumar iza las transforma- ciones entre estos sistemas.
101
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

También hemos definido precisamente cuatro variaciones
del sistema de Ascención Recta.
a). - Celeste medio ( C.M. )
b). - Celeste verdadero ( C.V. )
c). - Lugar aparente { L. A. )
d). - Lugar observado ( L.O. )
Los cuales todos varían con el tiempo, de manera que la
época T en los cuales ellos son referidos debe ser especificada. La Fig. 3-11 muestra los parámetros que conectan todos estos Sistemas de coordenadas.
102
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
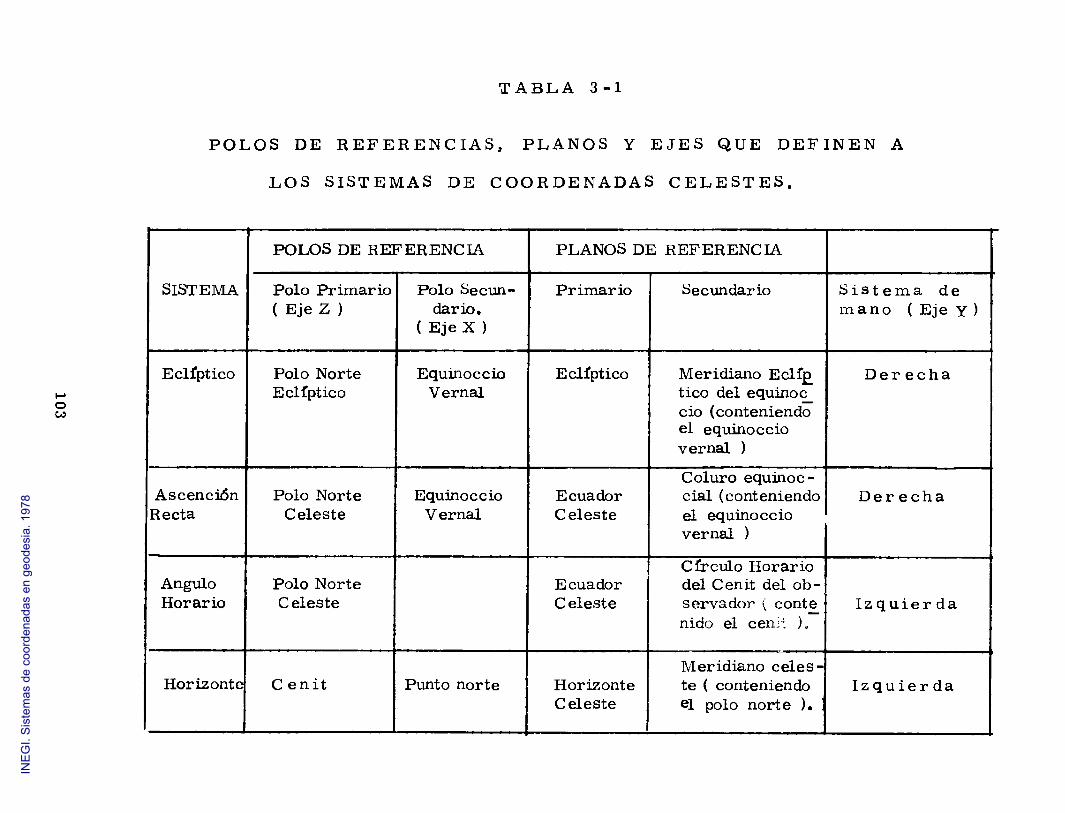
TABLA 3-1
POLOS DE REFERENCIAS, PLANOS Y EJES QUE DEFINEN A
LOS SISTEMAS DE COORDENADAS CELESTES.
SISTEMA
POLOS DE REFERENCIA PLANOS DE REFERENCIA
Polo Primario
( Eje Z )
Polo Secun- dario.
( Eje X )
Primario Secundario Sist ema de
mano ( Eje Y )
Eclíptico Polo Norte
Eclíptico Equinoccio
Vernal Eclíptico Meridiano Eelijo
tico del equinoc
ció (conteniendo el equinoccio
vernal )
Der echa
Ascención
Recta Polo Norte
Celeste
Equinoccio
V ernal Ecuador
Celeste
Coluro equinoc- cial (conteniendo
el equinoccio vernal )
Der echa
Angulo
Horario
Polo Norte
Celeste
Ecuador
Celeste
Círculo Horario del Cénit del ob- servador ( conté
nido el cénit ).
Izquierda
Horizonte Cénit Punto norte Horizonte
Celeste
Meridiano celes-
te ( conteniendo
el polo norte ).
Izquierda
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
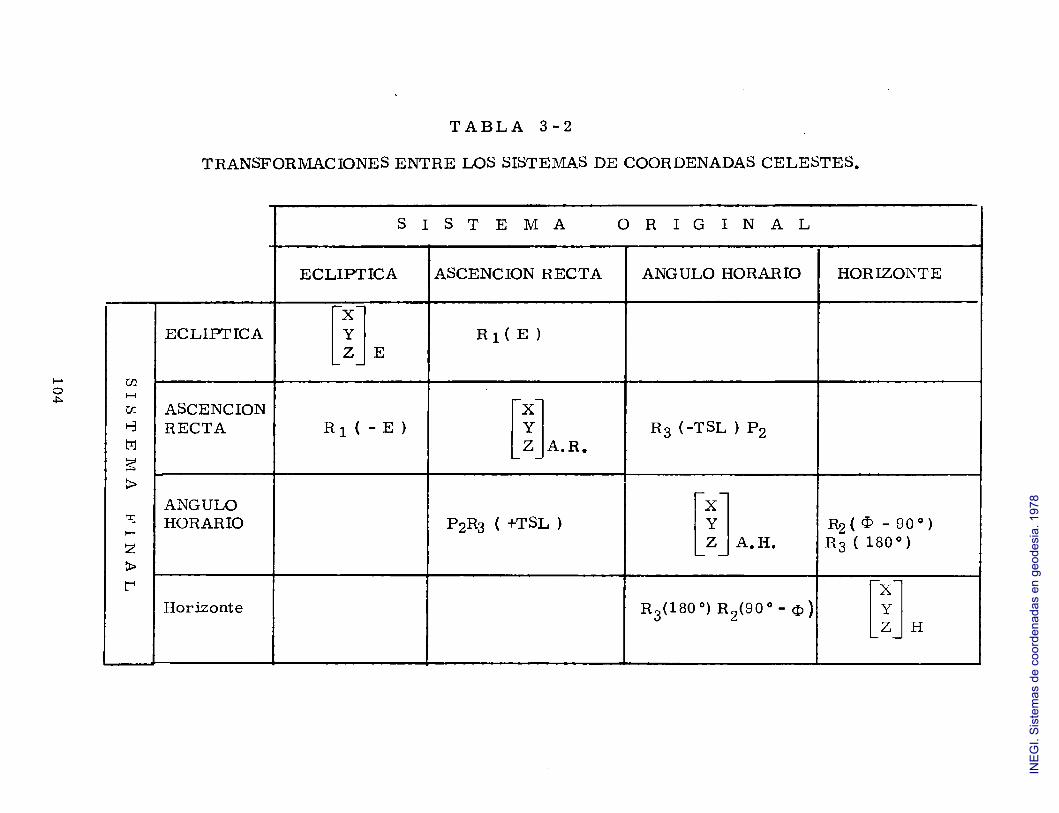
TABLA 3-2
TRANSFORMACIONES ENTRE LOS SISTEMAS DE COORDENADAS CELESTES.
SISTEMA ORIGINAL
ECLIPTICA ASCENCION RECTA ANGULO HORARIO HORIZONTE
SIS
TE
MA
FIN
AL
ECLIPTICA
X
Y Z E
R 1 ( E )
ASCENCION
RECTA R 1 ( - E )
rxi Y
|_ZJA.R.
R3 (-TSL ) P2
ANGULO HORARIO P2R3 ( +TSL )
fxl Y
|_zj A.H. Rg( $ - 90° ) R3 ( 180°)
Horizonte R3(180°) R2(90o - ¢) X
Y Z H
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
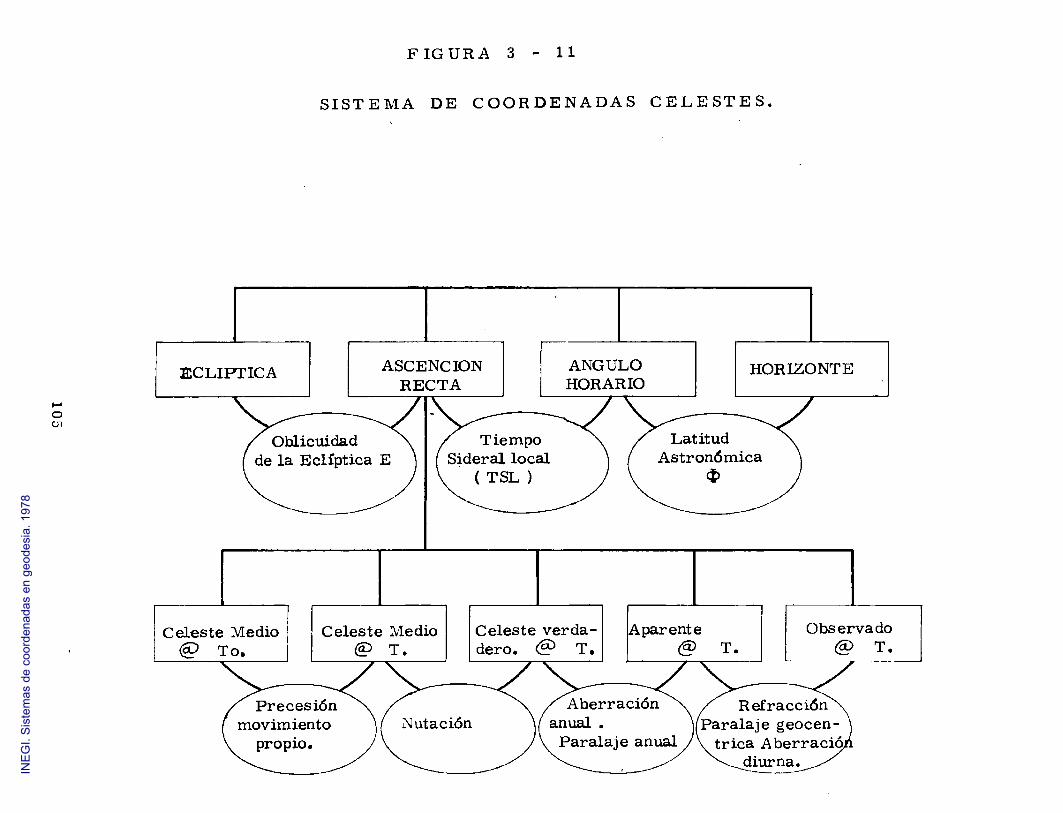
FIGURA 3-11
SISTEMA DE COORDENADAS CELESTES.
O ai
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
4.- EL SISTEMA DE COORDENADAS ORBITALES.
En este capítulo discutiremos el sistema orbital, que es
usado para definir las coordenadas de un satélite que órbita alre- dedor de la Tierra. Discutiremos primero la elipse orbital y
el sistema de coordenadas en el plano orbital. Luego transfor mamos este sistema a los sistemas celestes aparente y terrestre
promedio y discutiremos las variaciones en los elementos orbitales.
Finalmente son derivadas las expresiones para las coordenadas del sub-punto del satélite y las coordenadas topocéntricas del satélite.
4.1.- LA ELIPSE ORBITAL Y ANOMALIAS ORBITALES.
La trayectoria de un cuerpo que se mueve en un campo de fuerza central describe una elipse con la fuerza de atracción centra-
da en uno de los focos de la elipse.
En el caso de un satélite que órbita alrededor de la T ierra,
esta es llamada " Elipse Orbital " y el centro de gravedad de la
Tierra está en uno de los focos ( ver Fig. 4-1 ). El punto de
máxima aproximación del satélite a la Tierra es llamado " Perigeo " y el punto más alejado es llamado " apogeo ". Ambos perigeo y apogeo se apoyan sobre el semieje mayor de la elipse llamada la " Linea de ábsides El tamaño y la forma de la elipse orbital
están definidas us nal mente usando el " semi eje mayor " ( a ) y la
" Excentricidad " { e ) donde:
y ( b ) es el " semieje menor " de la elipse.
106 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
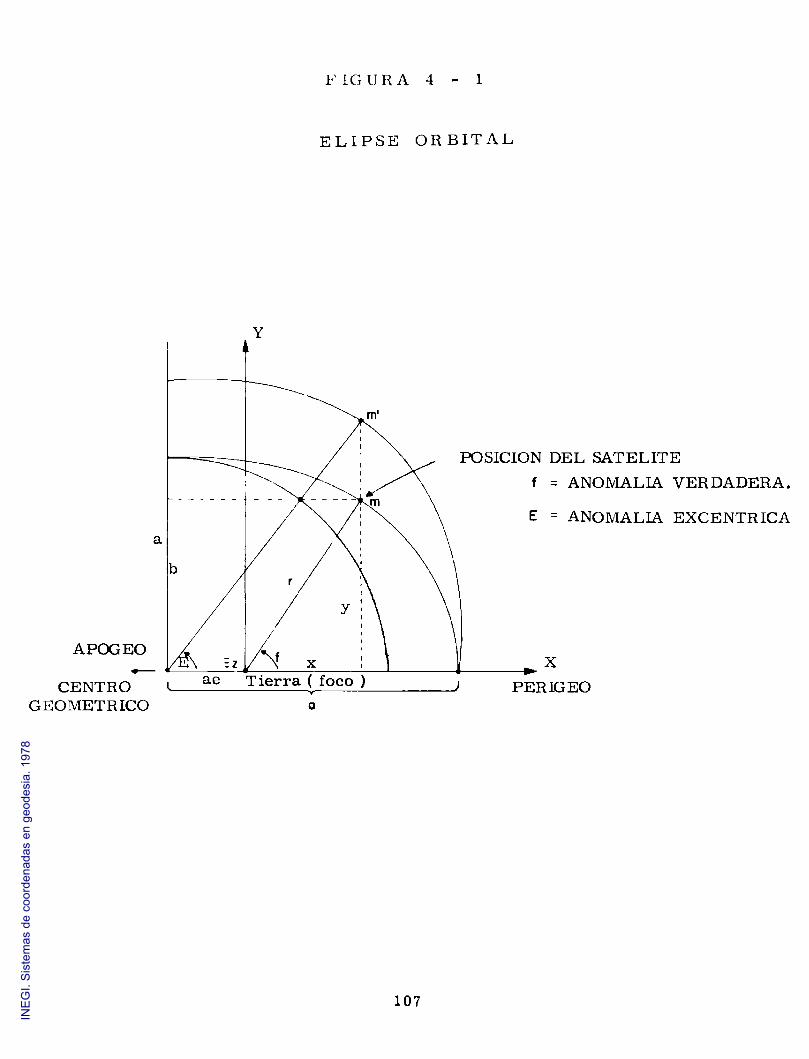
FIGURA 4 - 1
ELIPSE ORBITAL
Y
107
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Consideremos que el satélite está en un punto ( m ) so -
bre la elipse orbital.
La distancia angular entre el perigeo y ( m ) es llama-
da la " anomalía del satélite Hay tres anomalías: la " ano
malía verdadera " ( f ) es el ángulo entre la línea de ábsides y la línea que une los " focos " con el satélite.
Considerando la proyección de la posición del satélite
{ m ) a través de una línea paralela al semieje menor hasta intersectar un círculo con un radio igual ai semieje mayor en un nun** { ~r' ).
La " anomalía excéntrica " ( E ) es el ángulo entre la
linea de ábsides y la linea que une al centro geométrico de la elipse con ( m1 ).
La " anomalía meüia 1 ( M ) e¿ la anomalía verdadera
que corresponde al movimiento de un satélite imaginario de ve- locidad angular uniforme, esto es M=0 en el perigeo y lue-
go se incrementa uniformemente a una razón de 360° por re- volución. Cuando está expresada como una razón por unidad
de tiempo entonces se le llama " movimiento ano mal íst ico me- dio " { ñ ).
Las relaciones entre la anomalía verdadera ( f ) y la anomalía excéntrica ( E ) es de la Fig. 4-1
X
y
= r eos f
sen f =
« eos E-ae
b sen E =
a (eos E-e)
a (1 - sen E
-1
o
ton f _ ()- e?)'/g sen E cos E - e 4-3
relación entre la anomalía excéntrica E y la anomalía media M es la ecuación de Kepler ( Kaula 1966 Pág 23 ).
M = E - e sen E
Donde M y E están en Radianes.
108
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Estamos dando generalmente la anomalía media AI y queremos encontrar la anomalía excéntrica E a partir de la
ecuación 4-4. Presentaremos tres formas:
oí la excentricidad es muy pequeña { digamos e - ü.Uu¿;
entonces el término e sen E será pequeño y M = E
Por lo tanto podemos escribir:
E = M + e sen E = M + e sen M 4-5
Para una excentricidad de ^e = 0.002 está aproximación
introduce un error de cerca de 10 Radianes.
Si se requiere mayor precisión o la excentricidad no es pequeña podemos resolver iterativamente la ec. 4-4. Tomando
la diferencial total de 4-4.
5 M = (I- e cos E ) S E
BE; ^ 4-6 I -e cos E
Dada M la solución iterativa de 4-4 comienza por hacer una aproximación inicial a partir de 4.5 como:
E o = M + e sen M
Las ecuaciones siguientes están evaluadas iterativamente
en orden:
M i = Ei - e sen El
AM = Mi - M
ae = I- e eos Ei
E¡ + I = Ei + AE
Hasta que la diferencia AM sea menor que algunos de
valor elegido E.
109
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Un tercer método de evaluar E es usar series de potencia en ( e ) por ejemplo ( Borwer y Clemence 1961 Pág. 76 );
E.M + (e--e + —^ _ 92|g 5 I 7 .
e— e ) sen M
+(-£- e2—e4 + e6) sen 2 M +
+(ie3--üe5+-si-e7)sen3" +
+ <^e4-£'6Hen4M + (^e=-f|§e')sen5M +
+ (|J.«)Mn6M + ^.' sen7M
4 "T
4.2.- SISTEMA DE COORDENADAS ORBITALES.
El sistema de coordenadas orbitales { ORB ) está definido como sigue: ( Ver Fig. 4-2 )
a). - El origen está en el centro de gravedad de la
Tierra.
b). - El plano primario es el plano de la elipse
orbital y el polo primario ( eje Z ) es per-
pendicular a este plano{ ver Fig. 4-1 ) c). - El eje primario ( eje X ) es la línea de ábsides.
d). - El eje "Y" es elegido de manera que el sistema sea de mano derecha»
El vector de posición del satélite en su órbita, está dado por:
x
y
z
eos f
sen f
o
o (eos E-e)
a (t-e }sen E 4-8
Note que Z=o porque se asume que el satélite no está fuera del plano de la órbita.
110
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
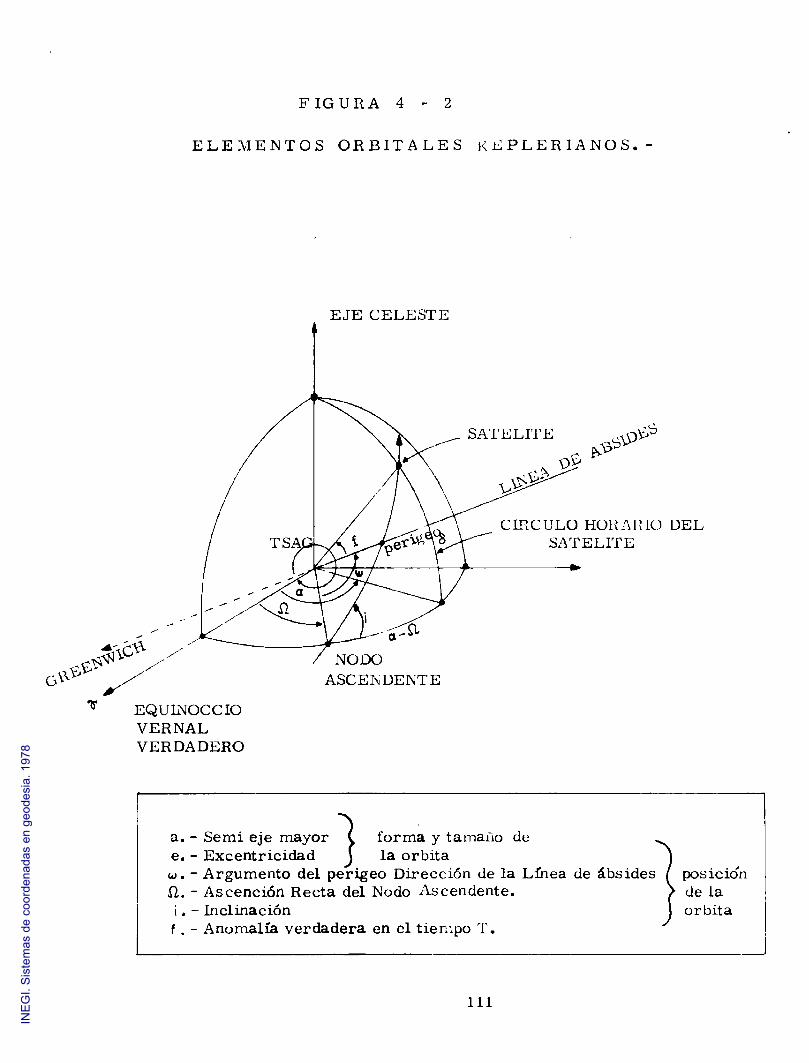
FIGURA 4 - 2
ELEMENTOS ORBITALES K E P L E RIANOS. -
EJE CELESTE
C*
G
T EQUINOCCIO VERNAL VERDADERO
NODO
ASCENDENTE
CIRCULO HORARIO DEL SATELITE
a. - Semi eje mayor ( forma y tamaño de
e. - Excentricidad J la órbita w. - Argumento del perigeo Dirección de la Línea de ábsides / posición £2. - Ascención Recta del Nodo Ascendente. > de la i. - Inclinación ) órbita
f . - Anomalía verdadera en el tiempo T.
111
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

4.3.- TRANSFORMACION DEL SISTEMA ORBITAL AL TERRESTRE PROMEDIO.
El plano orbital no rota con la tierra, sino que permanece fijo en el sistema celeste. El sistema orbital y el sistema ce- leste aparente tienen ambos sus orígenes en el centro de grave-
dad de la Tierra.
De la Fig. 4-2 vemos que cuando el plano oroital es ex-
tendido hasta encontrar la esfera celexte, intersecta al ecuador
celeste en el "nodo as cent e' ( Donde el satélite cruza al ecuador
de sur a norte ) y el " nodo ascendente El ángulo entre el ecuador celeste y el plano orbital es la " inclinación " ( i ). El ángulo entre el nodo ascendente y la línea de ábsides, medido
en el plano orbital es el " argumento del perigeo " ( w ).
El ángulo entre el equinoccio vernal y el nodo ascendente
medido en el plano ecuatorial celeste es la " ascención recta del
nodo ascendente " ( íl ).
La transformación del sistema orbital al sistema celeste aparente es:
= Rj( — íl ) R|( - i) R 3 ( — o»)
CA ORB
4-9
La transformación del celeste aparente al terrestre pro-
medio está dada por la ecuación 3-22, de modo que:
— 4-10
112
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
4.4o- VARIACIONES EN LOS ELEMENTOS ORBITALES.
Anteriormente hemos asumido que la órbita del satélite no
varía con el tiempo y está definida completamente por los seis " elementos orbitales Keplerianos " A, c, e, w, i; Ú El campo de la fuerza gravitacional de la Tierra no es simétrico
esféricamente, lo que está evidenciando por las ondulaciones del
geoide y el pandeo ecuatorial. También la atmósfera ejerce una
fluctuante fuerza de arrastre sobre el satélite. Debido a estos y a otros pequeños efectos, la trayectoria del satélite no puede
ser considerada como siendo una elipse fija. Sin embargo, para
cada época de tiempo T habrá una elipse orbital diferente tangente a la trayectoria del satélite en una época. Cada una de estas elipses diferentes tendrá un conjunto de elementos orbitales Keple-
rianos y si la variación en estos elementos es conocida con el
tiempo, se dice que describen una " elipse orbital osculatoria "
que describe exactamente la trayectoria del satélite.
La variación con el tiempo del ángulo de inclinación es equivalente a introducir una componente variable con él tiempo
fuera del plano, y esto es hecho frecuentemente.
Para órbitas aproximadamente circulares, la excentricidad es pequeña, por lo que las variaciones son despreciables general-
mente.
4.5.- EL SUBPUNTO DEL SATELITE.
El subpunto de un satélite es simplemente la traza de la
trayectoria del satélite sobre el elipsoide ( ver Fig. 4-3 ).
Las coordenadas del subpunto están dadas por la latitud geodésica v y la longitud x de la normal elipsoidal que pasa
a través del satélite.
Las coordenadas cartesianas terrestre promedio, del saté-
lite son conocidas de la ecuación 4-10. De la ecuación 2-32
113
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
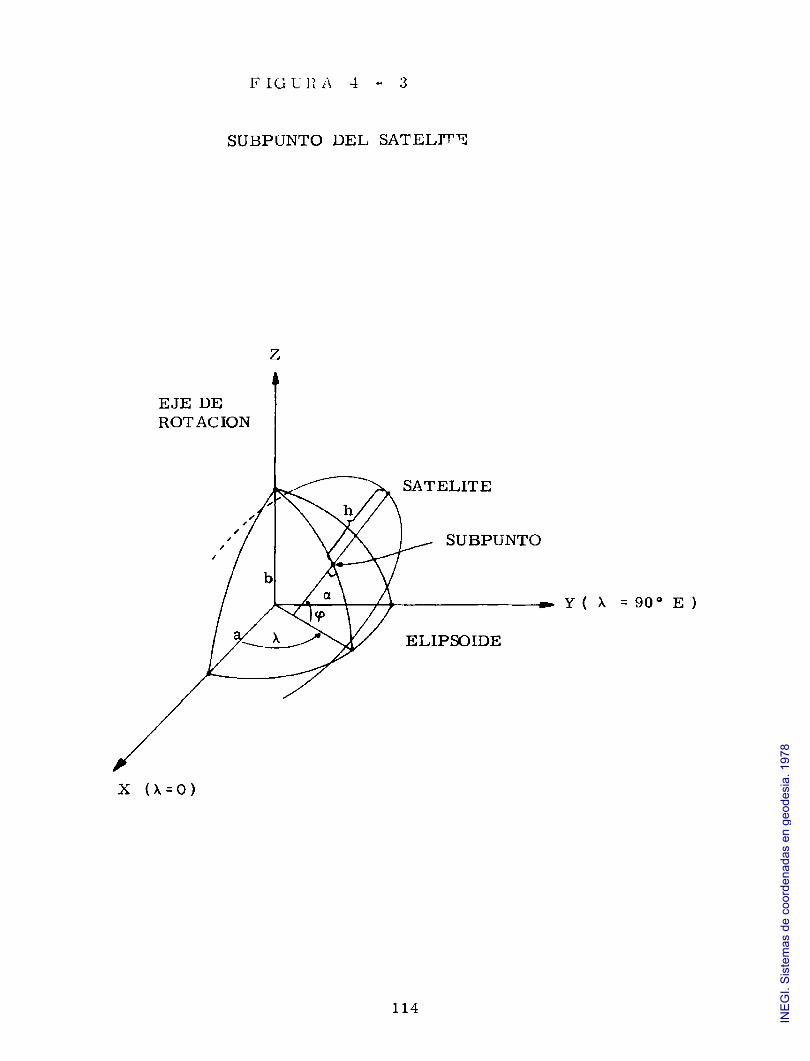
FIGURA 4-3
SUBPUNTO DEL SATELITE
Z
114
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

T.P
X O
y o z o
+ (N +h) eos 9 eos *
(N +h) cos f sen X
(N • 4-h) sen <p
V si los parámetros del elipsoide de referencia ( a, b,
Xo; Yo; Zo ) son conocidos, esta ecuación puede ser invertida
iterativamente para resolver a ( y , & , h ) usando el método
de la sección 2.2.6
4.6.- COORDENADAS TOPOCENTRIC AS DEL SAT ELITE .
Si estamos observando un satélite en la posición ( j )
desde una estación ( i ) sobre la Tierra, ( ver Fig. 4-4 ) en- tonces requeriremos una expresión para dar coordenadas del sa
télite en el sistema geodésico local de la estación ( i ).
Si las coordenadas < <p¡ \ ¡ h ¡ ) de la estación ( j )
son conocidad respecto a su éli&soidé de referencia ( a; b; Xo;
Yo; Zo; ) entonces las coordenadas cartesianas geodésicas de i:
n =
Pueden ser calculadas de la ecuación 2-31. Si las coor-
denadas cartesianas terrestres promedio de ( j ) han sido cal-
culadas por los métodos delineados en este cap&ulo, entonces las coordenadas geodésicas de ( j ) son:
x¡ y¡ Zi
4-11
T.P.
X 0 y o z o
■4 — 12
115
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
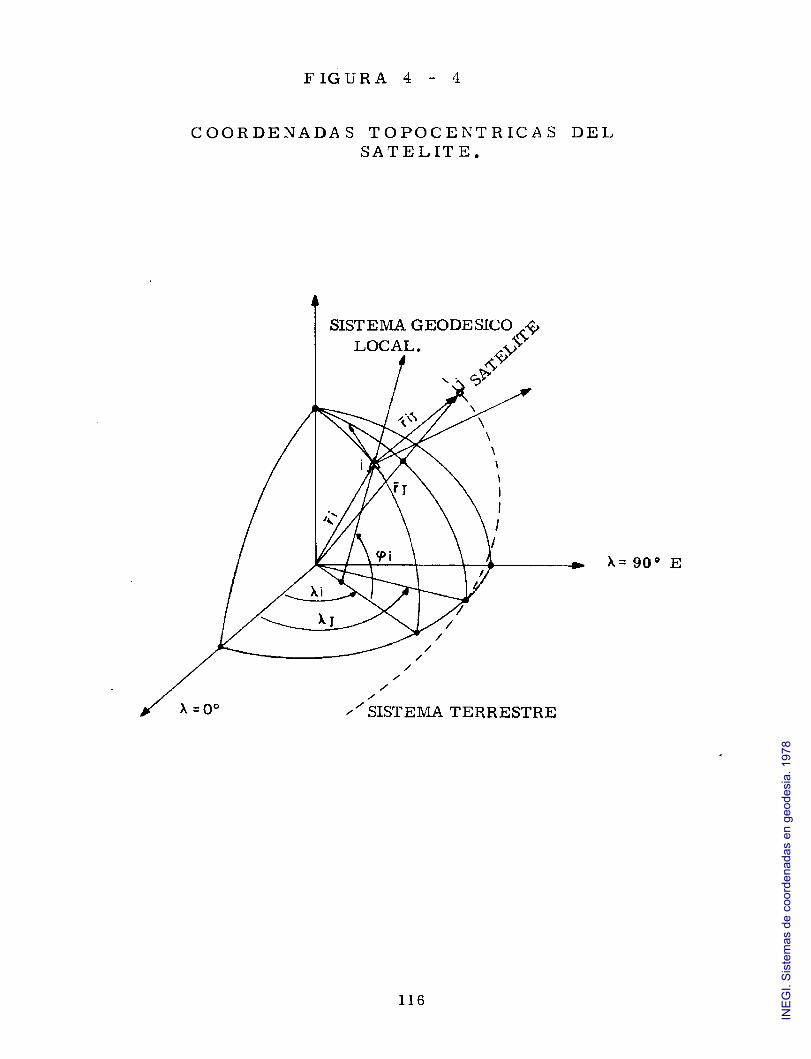
FIGURA 4 4
COORDENADAS TOPOCENTRICAS DEL SATELITE.
116
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

El " Vector rango " de ( i ) a { y ) es:
r17 = r j - ri xj - XI yj - yi
Z]- zi
Ax Ay Az
Las coordenadas de un vector rango pueden ser expre-
sadas en el sistema geodésico local .usando la ecuación 2-67.
Ax Ay Az
P2 R2(cp -90°) R3 (X -180°)
G.L
Ax Ay
Az
4-14
Pero de la ecuación 2-66
Ax
Ay Az
= Ar G.L
cos o cos a
cos a sen a sen a
■4-15
Donde el rango
Ar - ( Ax2 + Ay2 + Az2 )'/Z 4-16
y la " altitud 11 ( a ) y " azimut " ( a ) están
dados por:
4-18
117
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
5.- RESUMEN DE ¡SISTEMAS DE COORDENADAS.
En este capítulo resumiremos las relaciones entre los
sistemas de coordenadas que se trataron en estas notas. Ex-
plicaremos también una paradoja dualidad la cual ha emergido
antes en estas notas. Este capítulo es, en efecto, una ex- plicación de los símbolos y abreviaciones usados en la Fig. 5-1
5.1.- SISTEMAS TERRESTRES.
Discutimos cinco sistemas terrestres:
a).- T.I.=Sistema de coordenadas terrestre instantáneo.
b)s - T.P. = Sistema de coordenadas terrestre promedio.
c). - G- Sistema de coordenadas Geodésicas.
d). - G.L. = Sistema de coordenadas Geodésica local.
e). - A.L. = Sistema de coordenadas Astronómico local.
Los que están relacionados a cada uno de los otros por los
cuatro conjuntos de parámetros.
a).- Movimiento Polar ( Xp,Yp ) relaciona T.I. y T.P.
b). - Traslación del origen (Xo, Yo, Zo ) relaciona T.P y G
c).- Latitud y longitud geodésicas ( 9, X ) relaciona G y G.L.
d). - Latitud y longitud astronómica {<$> A ) relaciona T.P. y A.L.
118
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
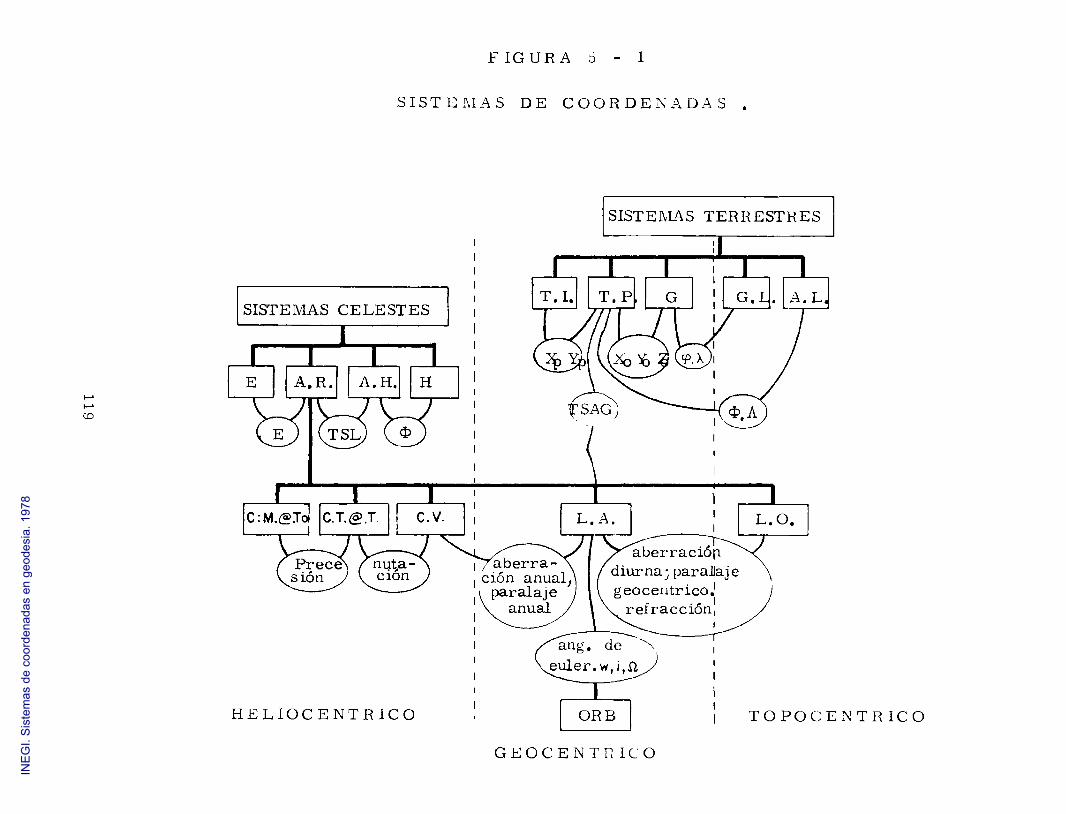
FIGURA 5 - 1
SISTEMAS DE COORDENADAS .
CD
PreceN sión cion
GEOCENTRICO
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
5.2. SISTEMAS CELESTES.
Discutimos cuatro sistemas celestes principales:
a). - E = Sistema de coord. Celeste Eclíptico.
b). - A.R = Sistema de coord Celeste de Ascención Recta.
c). - A.H. = Sistema de coord.Celeste del Angulo Horario.
d). - H. = Sistema de coord. Celeste del Horizonte.
Los que están referidos a cada uno de los otros por los tres parámetros.
a). - Oblicuidad de la eclíptica (E ) Relaciona E y AR. b). - Tiempo Sideral local ( T.S.L. ) Relaciona A.R y A-H. c). - Latitud astronómica ( ) Relaciona A.H y H.
El sistema de A.R tiene cuatro variaciones:
a).- C.M. t Sistema de coord, celeste medio
b). - C.V.= Sistema de coord, celeste verdadero. c). - L.A.= Sistema de coord del lugar aparente.
d). - L.O. = Sistema de coord del lugar observado.
Los cuales todos varían con el tiempo y entonces solamente están definidos cuando está especificada la época T a la que están
referidos.
Los parámetros que relacionan estos sistemas son:
a).- Precesión y movimiento propio- Relaciona C.M a una época normal To, y C.M a una época T.
b). - Nutación. - Relaciona C.M y C„V. ambos para la épo ca T.
c). - Aberración anual y paralaje-relaciona C.V. y L.A. Ambos para la época T.
d). - Aberración diurna, paralaje geocéntrica y Refracción Relacionan L.A. y L.O a la época T.
120
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
5.3.- PARADOJA DE DUALIDAD EN LOS SISTEMAS CELESTES
APARENTE Y OBSERVADO.
La razón de que haya los sistemas aparente y observado es porque el observador no está en el centro de la esfera celeste ( El
centro del Sol ) y esto debe tenerse en cuenta de alguna manera.
Hay dos formas de hacer esta corrección y esta diferencia no ha
sido hecha explícita antes en estas notas.
Primero, podemos retener el sistema celeste verdadero ( con origen heliocéntrico ) como nuestro sistema de coordenadas
y aplicarle correcciones a las posiciones de las estrellas. Este
es el proceso descrito en las secciones, 3.5.4 y 3.5.5 donde
las correcciones de aberración y paralaje son aplicadas a la as- cención recta y a la declinación y no cambia el sistema de coor-
denadas. Por lo tanto decimos entonces que las estrellas tienen
" Lugares aparentes " o " Lugares observados " en el sistema ce
leste verdadero.
El segundo proceso es mover el origen actual del sistema celeste verdadero desde el centro del sol al centro de la Tierra ( para el sistema aparente ) y a la posición del observador ( para
el sistema observado ). Esto es lo que hemos hecho, cuando relacionando el sistema terrestre promedio con el sistema celeste en la sección 3.6 y el sistema orbital al sistema celeste en la
sección 4.3.- En este caso llamamos al desplazamiento del sis-
tema celeste verdadero el " Sistema celeste aparente En
otras palabras, hemos adoptado la convención de que:
a). - " Verdadero " significa heliocéntrico,
b). - " Aparente " significa a la vez geocéntrico o corregido por el desplazamiento heliocéntrico geocéntrico.
c). - " Observado " significa a la vez topocéntrico o corregido por el desplazamiento heliocéntrico
topocéntrico.
121
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Dos parámetros concectores, Movimiento Propio y Refracción
no tienen acceso en este segundo proyecto. El Movimiento Propio es el cambio en las posiciones de Las estrellas y es diferente para
cada estrella. Por lo tanto un sistema de coordenadas diferente, podría ser definido para cada estrella lo cual no es práctico. La
magnitud de la corrección por Refracción depende del ángulo inciden te y de las condiciones ambientales. Por lo tanto especificar que
el sistema de coordenadas seguirla a la refracción podría significar para cada ángulo incidentes, un sistema de coordenadas diferente» cada uno de los cuales estaría saltando alrededor junto con la tempe
ratura y el viento.
5.4.- LAS CONEXIONES ENTRE LOS SISTEMAS TERRESTRES CELESTES Y ORBITALES.
Los sistemas terrestre promedio y celeste aparente están relacionados por TSAG ( Tiempo Sideral aparente de Greenwich ).
Note que el uso de " aparente " en TSAG es consistente con la con vención que adoptamos en la sección previa. Esto es " aparente "
significa " geocéntrico
Los sistemas orbital y celeste aparente están relacionados por los ángulos de Euler:
a). - w = Argumento del perigeo,
b). - i = Inclinación orbital,
c). - íl = Ascención recta del nodo ascendente.
Para resumir las diferencias entre los sistemas terrestres celestes y orbitales:
a). - Los sistemas terrestres rotan y revolucionan con la Tierra.
b). - Los sistemas celestes no revolucionan con la T ierra.
c). - Los sistemas orbitales no rotan con la Tierra.
122
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
REFERENCIAS
Bomford, G. ( 1971 ). Geodesy, Third Edition, Oxford University Press, London.
Brouwer, D. and G. M. Clemence ( 19 61 ). Methods of Celestial Mechanics. Academic Pres, New York.
Goldstein, II. ( 1950 ). Classical Mechanics, Addison-Wesley
Publishing Company, Reading, Massachusetts.
Heiskanen, W.A. and H. Moritz ( 1967 ). Physical Geodesy. W. II. Freeman and Co., San Francisco.
Kaula, William M. { 1966 ). Theory of Satellite Geodesy. Blaisdell Publishing Company, Toronto.
Krakiwsky, E.J. ( 1968 ) "Sequential Least Squares Adjusment of
Satellite Triangulation and Trilateration in Combination with Terrestrial Data." Re-
ports of the Department of Geodetic Science No. 114, The Ohio State University.
Lambeck, K. ( 1971 ). "The Relation of Some Geodetic Datums to a
Global Geocentric Reference System",
Bulletin Geodesique, No. 99, page 3 7,
March.
Mueller, Ivan I. ( 1969 ). Spherical and Practical Astronomy as
Applied to Geodesy. Frederick Ungar Publishing Co., New York.
Nautical Almanac Offices of the United Kingdom and the United States
of America ( 1961 ). Explanatory Supplement to the Astronomical Ephemeris and Nautical
Almanac. H. M. Stationary Office, London.
Schmid, H. H. ( 1970 ). " A World Survey Control System and Its
Implications for National Control Networks." In Papers of the 63rd. Annual Meeting of
The Canadian Institute of Surveying, Halifax, 1970.
Thompson, E.H. ( 1969 ). An Introduction to the Algebra of the Ma-
trices With Some Applications. The Univer_
sity of Toronto Press, Toronto.
123 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Veis, G. ( 1960 ). " Geodetic Uses of Artificial Satellites." Smithsonian Contributions to Astrophysics,
2 , 9. Smithsonian Institution, Washington, D.C.
Veis, G. ( 19 66 ). "Geodetic Interpretation" in Geodetic Parameters for a 1966 Smithsonian Institution Standard Earth, Volume 1, Edited by C.A. Lundquist and G. Veis, Smithsonian As tro physical Observatory Special Report 200.
Wells, David E. ( 1971 ). " Matrices. " Department of Surveying Engineering Lecture Notes No. 15, The
University of New Brunswick, Fredericton.
Wells, D.E. and E.J. Krakiwsky ( 1971 ). " The Method of Least Squares ". Department of Surveying Engi- neering Lecture Notes No. 18, University
of New Brunswick, Fredericton.
Korn, G. A. and T. M. Korn ( 1968 ). " Mathematical Handbook
for Scientist and Engineers ". Second Edi- tion, McGraw-Hill, Toronto.
Paul, M. K. ( 1973 ) " A Note on the Computation of Geodetic ( Car tesian ) Coordinates." Bulletin Geodesique.
No. 108, page 135, June.
Hotine, M. ( 1969 ).. " Mathematical Geodesy ", ESSA Monograph 2, Washington, D. C.
Vanicek, P. ( 1972 ). "Physical Geodesy II ", Department of Surve-
ying Engineering .Lecture Notes No. 24,
University of New Brunswick, Fredericton.
Mitchell, H.C. ( 1948 ). " Definitions of terms used in geodetic and
other Surveys". U. S. Coast and Geodetic Survey - Special Publication 242.
Fischer, I., M. Slutsky, R. Shirley, P. Wyatt ( 1967 ). "Geoid
Charts of North and Central America ",
U. S. Army Map Service -Tech. Rep. No. 62.
Smith, P. A. ( 1971 ). " North American Datum " National Academy
of Sciences«National Academy of Engineering, ESSA E53 <N), Washington, D. C.
124 INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978

Merry, C . Al. and P. Vanicek ( 1973 ). " The Geoid and the
Positioning of Geodetic Datums The
Canadian Surveyor, 27, No. 5 (December).
Krakiwsky, E.J. , D.E. Wells and D. Thomson ( 1973 ). " Geod£
tic Control From Doppler Satellite Observa tions for lines under 200 Km" The Canadian
Surveyor, 27, 141-148.
125
INE
GI.
Sis
tem
as d
e co
orde
nada
s en
geo
desi
a. 1
978
Se terminó de imprimir en los talleres de la Dirección General de Integración y Análisis de ia información, sita en Dr. Ugarte No. 7. Tel.: 530 -33- 18. Primera edición: noviembre de 1978, 250 ejemplares. Primera reimpresión: noviembre de 1980, 250 ejemplares.

5PP secretaré de programación g presupuesto
COORDINACION GENERAL Oí IOS SE RVlC'CS NACIONALES DE ESTADISTICA. GEOGRAFIA E INFORMATICA