robotica
DESCRIPTION
ÂTRANSCRIPT

CONTROL DE ROBOTS
KERLY CARRERA
BRYAN RAMOSINGRID TROYABRYAN YUNGA
Los robots son capaces de iniciar y detener procesos sin la intervencioacuten manual del usuario Para ello necesitaraacuten recibir informacioacuten del exterior procesarla y emitir una respuesta en un automatismo dicha respuesta seraacute siempre la misma pero en un robot podemos tener diferentes comportamientos seguacuten las circunstancias A esto se le llama un sistema de control
A la informacioacuten que recibe el sistema del exterior se le denomina de forma geneacuterica entrada o input
A las condiciones que existen en el exterior despueacutes de la actuacioacuten (o no actuacioacuten) del robot se les denomina de forma geneacuterica salida o output
Sistemas de Lazo abierto Sistemas de lazo abierto o sistemas sin realimentacioacuten La salida no tiene efecto sobre el sistema
Un ejemplo puede ser el amplificador de sonido de un equipo de muacutesica
Cuando nosotros variamos el potencioacutemetro de volumen varia la cantidad de potencia que entrega el altavoz pero el sistema no sabe si se ha producido la variacioacuten que deseamos o no
Sistemas de Lazo CerradoSon aquellos en los que la salida influye sobre la sentildeal de entrada
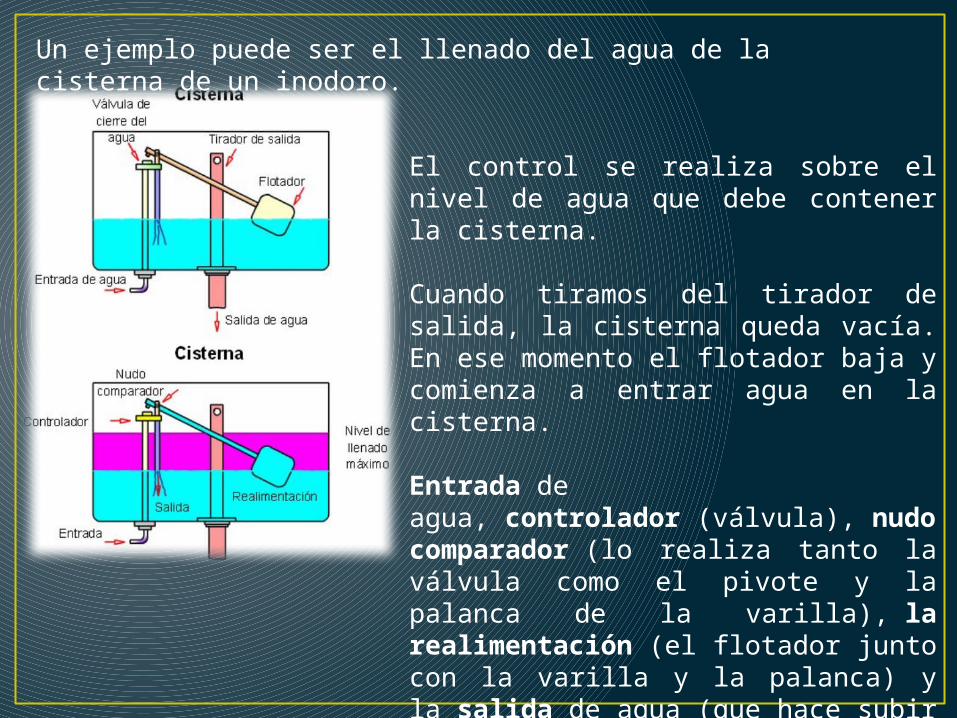
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

Los robots son capaces de iniciar y detener procesos sin la intervencioacuten manual del usuario Para ello necesitaraacuten recibir informacioacuten del exterior procesarla y emitir una respuesta en un automatismo dicha respuesta seraacute siempre la misma pero en un robot podemos tener diferentes comportamientos seguacuten las circunstancias A esto se le llama un sistema de control
A la informacioacuten que recibe el sistema del exterior se le denomina de forma geneacuterica entrada o input
A las condiciones que existen en el exterior despueacutes de la actuacioacuten (o no actuacioacuten) del robot se les denomina de forma geneacuterica salida o output
Sistemas de Lazo abierto Sistemas de lazo abierto o sistemas sin realimentacioacuten La salida no tiene efecto sobre el sistema
Un ejemplo puede ser el amplificador de sonido de un equipo de muacutesica
Cuando nosotros variamos el potencioacutemetro de volumen varia la cantidad de potencia que entrega el altavoz pero el sistema no sabe si se ha producido la variacioacuten que deseamos o no
Sistemas de Lazo CerradoSon aquellos en los que la salida influye sobre la sentildeal de entrada
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

A la informacioacuten que recibe el sistema del exterior se le denomina de forma geneacuterica entrada o input
A las condiciones que existen en el exterior despueacutes de la actuacioacuten (o no actuacioacuten) del robot se les denomina de forma geneacuterica salida o output
Sistemas de Lazo abierto Sistemas de lazo abierto o sistemas sin realimentacioacuten La salida no tiene efecto sobre el sistema
Un ejemplo puede ser el amplificador de sonido de un equipo de muacutesica
Cuando nosotros variamos el potencioacutemetro de volumen varia la cantidad de potencia que entrega el altavoz pero el sistema no sabe si se ha producido la variacioacuten que deseamos o no
Sistemas de Lazo CerradoSon aquellos en los que la salida influye sobre la sentildeal de entrada
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

Sistemas de Lazo abierto Sistemas de lazo abierto o sistemas sin realimentacioacuten La salida no tiene efecto sobre el sistema
Un ejemplo puede ser el amplificador de sonido de un equipo de muacutesica
Cuando nosotros variamos el potencioacutemetro de volumen varia la cantidad de potencia que entrega el altavoz pero el sistema no sabe si se ha producido la variacioacuten que deseamos o no
Sistemas de Lazo CerradoSon aquellos en los que la salida influye sobre la sentildeal de entrada
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

Sistemas de Lazo CerradoSon aquellos en los que la salida influye sobre la sentildeal de entrada
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-
Un ejemplo puede ser el llenado del agua de la cisterna de un inodoro
El control se realiza sobre el nivel de agua que debe contener la cisterna
Cuando tiramos del tirador de salida la cisterna queda vaciacutea En ese momento el flotador baja y comienza a entrar agua en la cisterna
Entrada de agua controlador (vaacutelvula) nudo comparador (lo realiza tanto la vaacutelvula como el pivote y la palanca de la varilla) la realimentacioacuten (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua)
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-
SISTEMAS DISCRETOS Los sistemas discretos son aquellos que realizan el control cada cierto tiempo
En la actualidad se utilizan sistemas digitales para el control siendo el ordenador el maacutes utilizado por su faacutecil programacioacuten y versatilidad
El control en los robots generalmente corresponde con sistemas discretos en lazo cerrado realizado por computador
El ordenador toma los datos de los sensores y activa los actuadores en intervalos lo maacutes cortos posibles del orden de milisegundos
CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

CONTROL POR ORDENADOR El ordenador se ha convertido en una de las herramientas baacutesicas a la hora de controlar sistemas automaacuteticos y robots
La versatilidad facilidad para reprogramarlos y un entorno graacutefico amigable son algunas de las caracteriacutesticas que los hacen ideales para esta tarea
Soacutelo es necesario una tarjeta controladora conectada al ordenador que hace de interface de enlace con el sistema automaacutetico o el robot y un software (programa) instalado en el ordenador que sea capaz de controlar la tarjeta y con ello el robot
Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

Control de Robots Moacuteviles
Asegurar que el movimiento del robot es estable y que se produce de acuerdo con cierto(s) criterio(s) de controlrArr CONTROL DE BAJO NIVEL1048708Tambieacuten nivel de servomecanismo en relacioacuten al control porRealimentacioacutenrArr CONTROL ALTO NIVEL1048708 Planificacioacuten1048708 Toma de decisiones y razonamiento requerido para ejecutar una cierta tarea
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-
EJEMPLO EN EL DISENtildeO DE AVIONES AUTOacuteNOMOS (UNMANNEDAERIAL VEHICLES UAV)
ALTO NIVEL a) Control de la trayectoria (control of the trajectory)1048708 Mantener la trayectoria deseada hacia el objetivo (guidance)1048708 Gps visioacuten mapas
BAJO NIVEL b) Control sobre la trayectoria (control about the trajectory)1048708Mientras el vehiacuteculo vuela hacia el objetivo siguiendo la trayectoria fijada se espera que mantenga su orientacioacuten estable sin oscilar alrededor de ninguno de los ejes1048708Giroacutescopos aceleroacutemetros inclinoacutemetros unidad inercial (inertial navigation system ins)1048708Desviaciones de la orientacioacuten adecuada (pE Roll) resulta en un ajuste inmediato de las superficies de control del avioacuten
Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-

Un sistema de control estaacute definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado de modo que se reduzcan las probabilidades de fallos y se obtengan los resultados buscadosLos sistemas de control realimentados se denominan tambieacuten sistemas de control de lazo cerrado
Control de Retroalimentacioacuten
En un sistema de control en lazo cerrado se alimenta al controlador la sentildeal de error de actuacioacuten que es la diferencia entre la sentildeal de entrada y la salida de realimentacioacuten (que puede ser la sentildeal de salida misma o una funcioacuten de la sentildeal de salida y sus derivadas oy integrales) a fin de reducir el error y llevar la salida del sistema a un valor conveniente El teacutermino control en lazo cerrado siempre implica el uso de una accioacuten de control realimentando para reducir el error del sistema
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
-