revista iberoamericana de automática e informática
TRANSCRIPT


www.revista-riai.org
Revista Iberoamericana de Automática e Informática Industrial 17 (2020) i
Presentación
Estimado lector,
El inicio del nuevo curso académico está coincidiendo con una nueva ola mundial de la pandemia de la Covid-19. Esto dificulta enormemente nuestras actividades tanto investigadoras y docentes como las de CEA. Pero también es una oportunidad de hacer las cosas de otra manera, usar nuevas herramientas de enseñanza universitaria y realizar parte de la investigación de forma remota.
Esta situación nos ha obligado a suspender la mayoría de las actividades de CEA, así como la celebración de las Jornadas de Automática que se iba a celebrar en Castellón en el mes de septiembre. Es la primera vez que las Jornadas se realizaron en modalidad de teleconferencia, siguiendo la estela de muchos eventos internacionales como el Congreso Mundial de la IFAC (Berlín) y el IEEE ICRA (Paris). Las Jornadas contaron con 13 sesiones remotas con una asistencia media de 80 personas.
Todos los Grupos Temáticos (GT) y Líneas Estratégicas (LE), así como la reunión de la redacción del RIAI, celebraron sus encuentros en remoto. Esto les ha permitido definir sus futuras líneas de actuación. Se celebraron además tres conferencias plenarias (con 100+ asistentes): Prof. Teresa Riesgo (Secretaria General de Innovación del Ministerio de Ciencia e Innovación) sobre la “Estructuras y planes nacionales de investigación e innovación para el periodo 2021-2027”; Prof. Víctor Muñoz (Catedrático de la Universidad de Málaga) sobre “Las aportaciones de la Automática a la lucha contra la Covid-19” y Prof. Rosa Aguilar (rectora de la Universidad de La Laguna) sobre “Las enseñanzas universitarias bajo Covid-19”. Muchas gracias a los tres.
En la Asamblea General de CEA se renovó parcialmente la Junta Directiva (JD). Desde estas páginas me gustaría dar las gracias a todos los miembros salientes con los que he trabajado muy a gusto y de manera muy productiva. ¡Muchas gracias por vuestra inestimable colaboración!
Las actual JD está formada por nuevos responsables de los GT y LE y por nuevos vocales cuyas responsabilidades se centrarán en reforzar las relaciones con organizaciones y organismos nacionales (COSCE, Academias, Ministerios, etc.), con sociedades científicas internacionales (IFAC, IEEE, etc.), impulsar la participación de la mujer en la Automática y la educación STEM. Por otro lado, se van a reforzar las actividades de difusión con los webinars en Automática y la web. Por último, se ha incorporado un gestor de CEA.
Me es grato informar sobre el Premio CEA que se concede bienalmente como reconocimiento a las personas “por sus méritos alcanzados a lo largo de su trayectoria académica y profesional”. El jurado, compuesto por los premiados anteriores, ha decidido por unanimidad otorgar el premio al Prof. Miguel Ángel Salichs de la Universidad Carlos III de Madrid "por sus excepcionales contribuciones a la consolidación de CEA y sus internacionalmente reconocidas aportaciones al desarrollo de la Robótica Social”. El acto de entrega del premio se realizará en las próximas Jornadas de Automática 2021 a celebrarse en Castellón. ¡Nuestras felicitaciones desde estas páginas!
Otros de los acontecimientos importantes de este último periodo ha sido la reciente publicación del nuevo plan nacional de I+D denominado EECTI (Estrategia Española de Ciencia, Tecnología e Innovación 2021-2027). La EECTI 2021-2027 está específicamente diseñada para facilitar la articulación de las políticas nacionales de I+D+i con las políticas de la Unión Europea. Cuenta con los seis sectores estratégicos: salud; cultura; seguridad para la sociedad; mundo digital, industria, espacio y defensa; clima, energía y movilidad; y alimentación, bioeconomía, recursos naturales y medio ambiente. Las líneas de investigación de CEA encajan en varios de estos sectores como salud o energía. Me gustaría destacar, dentro de la prioridad Mundo digital, industria, espacio y defensa, las dos líneas estratégicas, en donde, en mi opinión, las temáticas de CEA encajan muy bien: Inteligencia Artificial y robótica, y Modelización y análisis. Seguiremos informando sobre la implementación futura de este plan.
Carlos Balaguer Presidente de CEA

www.revista-riai.org
Revista Iberoamericana de Automática e Informática Industrial 17 (2020) ii
Nota de Redacción
El desarrollo de nuestro trabajo de investigación en la coyuntura actual, resultado de la aplicación de las restricciones impuestas por la pandemia del Coronavirus Covid-19, requiere más que nunca la existencia de canales de comunicación ágiles, fiables y precisos que permitan una comunicación fluida entre los grupos de investigación y un acceso rápido a los últimos resultados obtenidos que no pueden difundirse a través de reuniones científicas convencionales.
En nuestra asociación, hemos tenido la experiencia de unas Jornadas de Automática “virtuales” que han servido, entre otras cosas, para reforzar el interés en mantener este contacto directo y el intercambio de opiniones y novedades, esperanzados en volver a las tradicionales jornadas en el próximo año. En este marco, tuvimos una exitosa reunión (¡también virtual!) del Comité Editorial de RIAI con una inusitada participación de más de 40 colaboradores, poniendo de manifiesto la vitalidad de nuestro órgano de difusión. Se propusieron distintas acciones orientadas a mejorar el atractivo de RIAI para que nuestros lectores accedan a ella y la consideren apropiada para la publicación de sus mejores resultados, entre las que cabe resaltar:
Sugerir a los responsables de los Grupos Temáticos la preparación de un artículo sobre el estado del arte de la temática del grupo.
Acortar los plazos de revisión y evaluación para cumplir con el compromiso de una primera evaluación antes de tres meses (siempre con, al menos, dos revisiones coincidentes).
Mejorar la visibilidad de RIAI, generalizando el uso de la lista de palabras clave, no solo en los artículos sino también en los perfiles de revisores y autores, y manteniendo un índice de impacto que compense por el esfuerzo de preparar la publicación.
Queremos enfatizar que, además de obtener un buen reconocimiento de los resultados publicados, RIAI pretende servir de cómodo medio de difusión de nuestro estado del arte en la comunidad hispanohablante, facilitando una pronta publicación.
Sobre este número
En este número presentamos dos tutoriales de distinta naturaleza. Uno de carácter más aplicado sobre la prometedora utilización de la destilación por membranas, que plantea interesantes problemas de modelado y control, y otro basado en un libro de reciente publicación sobre una nueva técnica de control de trayectorias. El número se completa con ocho artículos de contenido variado, como lo es el ámbito de nuestra revista: desde aplicaciones de control en sistemas mecánicos y biológicos hasta cuestiones sobre sensores y señales y aplicaciones específicas en sistemas electrónicos. Como es habitual, la robótica está representada tanto en sus aspectos de control como en una revisión del software más frecuentemente utilizado. Finalmente, se ha incluido un aspecto fundamental en la nueva perspectiva integradora de Industria 4.0.
Una vez más, esperamos vuestro apoyo, sugerencias y la colaboración de todos los autores potenciales de nuestro ámbito.
El equipo editorial de RIAI

Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 www.revista-riai.org
Modelado y control automatico en destilacion por membranas solar:fundamentos y propuestas para su desarrollo tecnologico
Gil, J.D.a,∗, Roca, L.b, Berenguel, M.a
aCentro Mixto CIESOL, ceiA3, Universidad de Almerıa, Ctra. Sacramento s/n, Almerıa 04120, SpainbCIEMAT-Plataforma Solar de Almerıa, Ctra. de Senes s/n, Tabernas 04200, Almerıa, Spain.
To cite this article: Gil, J.D., Roca, L., Berenguel, M. 2020. Modelling and automatic control in solar membrane distillation: fundamentals and proposals for its technological development. Revista Iberoamericana de Automática e Informática Industrial 17, 329-343. https://doi.org/10.4995/riai.2020.13122
Resumen
La destilacion por membranas es un proceso de separacion impulsado termicamente en fase de investigacion. Esta tecnologıa destaca principalmente por la simplicidad del proceso y su baja temperatura de operacion, lo que permite que pueda ser alimentada con energıa solar de media-baja temperatura. Ası, la destilacion por membranas se ha convertido en una solucion prometedora, efi-ciente y sostenible para desarrollar plantas de desalacion de pequeno o mediano tamano en lugares aislados con buenas condiciones de radiacion. No obstante, para que esta tecnologıa pueda llegar a ser implementada a escala industrial se debe seguir investigando y mejorando aspectos relacionados tanto con el diseno de las membranas y de los modulos como con la propia operacion de estos. En relacion con la operacion, el desarrollo de modelos y tecnicas de control cobran un papel fundamental. En este trabajo se presenta una revision de las tecnicas de control y modelado aplicadas en este campo, describiendo las principales metodologıas empleadas y los retos futuros que quedan por abordar, incluyendo ademas un ejemplo ilustrativo.
Palabras Clave: Modelado, control, destilación por membranas, desalación, energía solar térmica.
Modelling and automatic control in solar membrane distillation: Fundamentals and proposals for its technological develop-ment
Abstract
Membrane distillation is a termally-driven separation process under investigation. This technology stands out for the simplicity of the process and for its low operating temperature, which allows it to be combined with low grade solar energy. Thus, membrane distillation has become a promising, efficient and sustainable solution for the development of small-medium stand-alone desalina-tion facilities to be implemented in offgrids areas with good irradiance conditions. However, in order to develop this technology on an industrial scale, research must continue to improve aspects related to both the design of membranes and modules and their operation. Regarding the operation, the development of models and control techniques play a fundamental role. This paper presents a review of the control and modeling techniques applied in this field, describing the main methodologies employed and the future challenges to be addressed, also including an illustrative example.
Keywords: Modelling, control, membrane distillation, desalination, solar thermal energy.
1. Introduccion
La creciente demanda de agua asociada al crecimiento eco-
nomico y de la poblacion, ası como a la disminucion de las reservas de agua como consecuencia del cambio climatico y la contaminacion, estan agravando el problema de la escasez de
∗Autor para correspondencia: [email protected] 4,0 International (CC BY-NC-ND 4,0)

agua en el mundo. Diversos estudios estiman que el 60 % dela poblacion mundial sufrira escasez severa de agua en 2025(Schewe et al., 2014). Estas estadısticas demuestran que lasfuentes de agua convencionales, como acuıferos, lagos, aguade lluvia o deshielo, ya no son suficientes para satisfacer lasdemandas humanas en areas con escasez de agua. Este hechoentra en conflicto directo con los objetivos mundiales de desa-rrollo sostenible aprobados por la Organizacion de las Nacio-nes Unidas (ONU) en 2015, entre los que destaca uno dirigidoa “garantizar la disponibilidad de agua y su gestion sostenible yel saneamiento para todos”(Jones et al., 2018).
El agua no solo esta limitada en cuanto a cantidad, sino quetambien en la calidad suficiente para el consumo humano. Unade las principales consecuencias del cambio climatico es la de-gradacion de los recursos hıdricos, ya que los fenomenos deprecipitacion extremos transportan patogenos y otros contami-nantes a las vıas fluviales a traves de escorrentıas e inundacio-nes (DeNicola et al., 2015). Ademas, hay que sumar otras con-secuencias del cambio climatico como la sequıa y la desertifica-cion, las cuales estan aumentando significativamente cubriendoareas cada vez mas amplias del planeta.
El problema de la escasez agua resulta paradojico si se tieneen cuenta que vivimos en un planeta en el que dos tercios de lasuperficie estan cubiertos de agua. Sin embargo, alrededor del99 % del total es demasiado salada (agua de mar) o inaccesible(capas de hielo y acuıferos). Ası, el agua pura en estado lıqui-do practicamente no se encuentra en la naturaleza, y lo que sedenomina agua en realidad es una disolucion de diversas salesen agua. La Organizacion Mundial de la Salud (OMS) estable-ce que el agua potable debe tener un contenido salino menor a0.05 % (WHO, 2011). En este contexto es donde la desalacion,que se define como el proceso de eliminar sales y minerales di-sueltos del agua salina para producir agua potable, puede seruna alternativa muy atractiva y viable para combatir el deficithıdrico.
Aunque la desalacion se posiciona como una de las solucio-nes mas prometedoras, un uso intensivo e irresponsable de estatecnologıa puede ocasionar serios problemas, entre los que des-tacan aquellos relacionados con el alto consumo energetico delas tecnologıas de desalacion actuales. Si las plantas de desala-cion se alimentan mediante fuentes de energıa convencionales,se requerira la quema de grandes cantidades de combustiblesfosiles, contribuyendo a la emision de CO2 y, por consiguiente,a la contaminacion medioambiental. Por el contrario, si dichasplantas se alimentan con energıas renovables, la desalacion sepuede convertir en una nueva fuente de agua dulce eficiente ysostenible, que cubra las necesidades basicas y, que lo haga conun impacto mınimo en el medio ambiente. La habitual coinci-dencia geografica entre la escasez de agua y la alta radiacionsolar, hace de la energıa solar termica la tecnologıa mas apro-piada y eficiente para alimentar las plantas de desalacion. Ası,la tecnologıa destilacion por membranas (Membrane Distilla-tion, MD) destaca como uno de los procesos de desalacion masadecuados para ser combinado con este tipo de fuentes energeti-cas, debido principalmente a su baja temperatura de operacion(Zaragoza et al., 2014).
MD es una tecnologıa de separacion emergente en fase deinvestigacion, que permite el uso de energıa solar termica de ba-ja temperatura para la obtencion de agua desalada, lo que la co-
loca en una posicion competitiva para reducir la tension a la queesta sometida el binomio energıa-agua en la actualidad (Desh-mukh et al., 2018). Sin embargo, su baja eficiencia energetica,debido principalmente a su alto consumo energetico por unidadde destilado producido, ha obstaculizado su implementacion aescala comercial hasta el momento. Por este motivo, para lo-grar que la tecnica MD sea competitiva a escala industrial, losavances tecnologicos deben estar enfocados a reducir su consu-mo energetico especıfico a partir de la mejora tanto en aspectosrelacionados con el diseno de los modulos, como en aquellosrelacionados con la propia operacion.
En las ultimas decadas, se han publicado numerosos traba-jos que presentan mejoras notables en el diseno de los modu-los MD. Estas investigaciones se han centrado en la creacionde nuevas membranas, nuevos modulos y configuraciones, yen comprender el ensuciamiento de la membrana, fenomenoque se conoce como fouling (Gonzalez et al., 2017). Estostrabajos han originado un gran progreso en terminos de efi-ciencia energetica, yendo de un consumo termico especıfi-co de 810 kWh/m3 en modulos MD sin recuperacion de ca-lor y en condiciones de operacion optimas (Guillen-Burriezaet al., 2011), al consumo actual de los modulos comerciales,49 kWh/m3 tambien referido a condiciones de operacion opti-mas pero en modulos con recuperacion de calor (Andres-Manaset al., 2020b). Una de las razones que hace a la tecnologıa MDespecialmente interesante es que estos requerimientos energeti-cos se pueden cubrir mediante energıa solar de media-baja tem-peratura o mediante fuentes de energıa de baja entalpıa comocalor residual (Wang and Chung, 2015).
Aunque el avance en el diseno de los modulos es aun una ra-ma de investigacion abierta, este ha sido uno de los temas mastratados en la literatura, y por tanto, se encuentra en una fasede madurez avanzada. Es por esto que, de acuerdo a las ideaspresentadas en Thomas et al. (2017), la destilacion por mem-branas se encuentra en una nueva fase de investigacion, en lacual, el foco de los trabajos de investigacion se encuentra pues-to en otras areas como son aquellas centradas en la operacionde los modulos MD. Estos trabajos estan dirigidos al modela-do y optimizacion de las principales variables que intervienenen los procesos MD (Ruiz-Aguirre et al., 2018), y al desarrollode metodologıas de control y optimizacion para la mejora delrendimiento termico de los modulos MD en tiempo real (Gilet al., 2018a). Se debe remarcar que este tipo de trabajos pue-den ser fundamentales para el desarrollo de plantas sosteniblesMD alimentadas con energıa solar (Solar Membrane Distilla-tion, SMD), ya que estas requieren que el sistema sea optimiza-do en tiempo real de acuerdo a las condiciones de irradiancia.
En este trabajo se presenta una revision del estado del ar-te de las tecnicas de modelado y control aplicadas a este ti-po de plantas. En primer lugar, se describira la tecnologıa dedestilacion por membranas poniendo de manifiesto sus princi-pales ventajas y su interes para la implementacion industrial.Ademas, se presentara un resumen de las principales instalacio-nes SMD que hay actualmente en el mundo. En segundo lugar,se hara un repaso de las tecnicas de modelado que se han apli-cado hasta el momento en esta tecnologıa. En tercer lugar, se re-visaran los principales enfoques de control aplicados a sistemasMD, indicando los principales objetivos que se persiguen y lastecnicas de control empleadas. A continuacion, se expondran
330 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343

algunas de las potenciales aplicaciones industriales de la tecno-logıa MD, mostrando como los algoritmos de control puedenser un elemento fundamental para su desarrollo. Por ultimo, seexpondran los retos futuros a abordar.
2. Tecnologıa de destilacion por membranas
2.1. Descripcion de la tecnologıaLa destilacion por membranas es un proceso de separacion
impulsado termicamente, basado en el transporte de moleculasen estado gaseoso a traves de una membrana hidrofoba y mi-croporosa (Khayet and Matsuura, 2011). Las fuerzas de tensionsuperficial de dicha membrana evitan el paso de las moleculasen estado lıquido a traves de los poros de esta, mientras que lasmoleculas en estado gaseoso la atraviesan gracias a la diferen-cia de presion parcial de vapor que se origina a ambos lados dela membrana, la cual se establece por una diferencia de tempe-ratura.
El funcionamiento general de un modulo MD con recupe-racion de calor se puede explicar en base a la Figura 1. El aguade alimentacion entra por el canal de alimentacion donde seprecalienta con el calor sensible que atraviesa el canal de con-densacion. Posteriormente, la solucion precalentada se dirigeal intercambiador de calor, donde se calienta con el fluido queproviene del circuito de generacion de calor (normalmente ba-sado en un campo solar termico de media-baja temperatura). Acontinuacion, la solucion caliente se circula al canal de evapo-racion. La diferencia de temperatura que hay entre los dos ladosde la membrana genera una diferencia de presion parcial de va-por, la cual fuerza a las moleculas en estado gaseoso a pasardesde el canal de evaporacion al de condensacion a traves de lamembrana. Finalmente, estas moleculas se condensan de formaque se obtiene destilado, mientras que las moleculas que no hanpasado a estado gaseoso se rechazan en forma de salmuera. Sedebe resaltar que se pueden encontrar diferentes configuracio-nes MD que se clasifican de acuerdo a la forma de generar ladiferencia de presion a traves de la membrana y el lugar dondetiene lugar la condensacion. Por tanto, la descripcion anteriorvarıa en funcion de la configuracion adoptada, ver Alkhudhiriet al. (2012) donde se explica este hecho en profundidad.
Figura 1: Diagrama esquematico de un modulo MD.
Desde el punto de vista del proceso, la tecnologıa MD tieneuna serie de ventajas que la hacen destacar en comparacion conotras tecnologıas de desalacion, como son:
Su habilidad para tratar soluciones con alta concentra-cion en sal (Kim et al., 2015; Andres-Manas et al., 2020b;Ruiz-Aguirre et al., 2019).
Su alto factor de rechazo, teoricamente del 100 % (Alk-hudhiri et al., 2012). Notese que en la practica alcanzavalores mayores al 99 % (Ruiz-Aguirre et al., 2019).
Su fuerza impulsora se origina a traves de una diferenciade temperatura, en lugar de ser originada mediante fuen-tes mecanicas que incrementan el consumo exergetico delproceso y los costes (Luo and Lior, 2016).
Su baja presion de operacion, de alrededor de 0.1 MPa,mucho menor que la requerida por tecnologıas conven-cionales de desalacion como la osmosis inversa 2.5-8.5 MPa (Miladi et al., 2019).
Su baja temperatura de operacion (menor de 90 oC),lo que permite que pueda ser facilmente acoplada conenergıa solar de baja temperatura (Zaragoza et al., 2014;Andres-Manas et al., 2020a) y otras fuentes como calorresidual (Wang and Chung, 2015).
Esta ultima ventaja, junto a la simplicidad del proceso, convier-ten a la tecnologıa MD en uno de los sistemas de desalacion masadecuados para el desarrollo de plantas de desalacion alimenta-das con energıa solar en lugares aislados con buenas condicio-nes de radiacion y requerimientos de agua no muy elevados.
2.2. Instalaciones SMD
Con el fin de evaluar el rendimiento y viabilidad de la tec-nologıa al ser alimentada con energıa solar (e implantada en lu-gares aislados) se han disenado e instalado varias plantas SMDa escala piloto por todo el mundo. En concreto, en Espana y Jor-dania, se han instalado plantas piloto en el marco del proyecto“SMADES” (Koschikowski et al., 2009; Banat et al., 2007), elcual demostro la factibilidad y viabilidad del desarrollo de plan-tas de desalacion autonomas MD alimentadas con energıa solarpara satisfacer demandas de agentes consumidores aislados dela red de agua publica. En la Tabla 1 se presenta un resumende las principales instalaciones SMD en el mundo, mostrandosu localizacion, ano de construccion y capacidad de produc-cion. Se debe destacar que solo se han incluido plantas MD nocompactas, es decir, plantas en las que la unidad de desalacion(modulo MD) y el sistema de generacion de calor (i.e., el camposolar termico) estan separados.
Aunque las plantas SMD de la Tabla 1 se han disenado me-diante diferentes metodos y por diferentes equipos investiga-dores, todas ellas se pueden describir en base al diagrama es-quematico mostrado en la Figura 2. De este modo, la energıatermica requerida por el proceso de destilacion se consigue atraves de un campo solar termico. La salida de este campo estaconectada a un tanque de almacenamiento termicamente aisla-do, que se puede utilizar para almacenar energıa termica o parafiltrar perturbaciones en la radiacion. Ademas, casi todas lasplantas cuentan con un circuito hidraulico que permite evitar eluso de dicho tanque y llevar a cabo la conexion directa entre elcampo solar y el modulo MD cuando las condiciones de irra-diancia sean favorables. Por ultimo, el modulo MD se conectaa este sistema de generacion de energıa termica mediante unintercambiador de calor. Se debe destacar que las diferentes ca-pacidades de las plantas estudiadas se deben principalmente alnumero de modulos MD utilizados en la unidad de desalaciono a la configuracion o eficiencia de los modulos MD utilizadosen cada planta.
Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 331

Tabla 1: Resumen de las instalaciones SMD seleccionadas a escala piloto no compactas. PSA significa Plataforma Solar de Almerıa y UAL Universidad de Almerıa.Referencia Localizacion Ano Capacidad [m3/dıa]
Banat et al. (2007) Aqaba (Jordania), 29o31’N 2007 0.90Koschikowski et al. (2009) Gran Canaria (Espana), 27o58’N 2009 1.60
Dow et al. (2010) Edenhope (Australia), 37o03’S 2010 0.12Cipollina et al. (2012) Palermo (Italia), 28o06’N 2012 0.15
Gabsi et al. (2013) Mahares (Tunez), 34o32’N 2013 0.21Chafidz et al. (2014) Riyadh, (Arabia Saudı) 24o38’N 2014 0.10
Gil et al. (2018b) Almerıa, (Espana) situada en la PSA, 36o50’N 2014 0.60Andres-Manas et al. (2020a) Almerıa, (Espana) situada en la UAL, 36o49’N 2014 0.29
Figura 2: Diagrama esquematico general de una planta SMD.
La mayorıa de los estudios llevados a cabo en las instala-ciones SMD mostrados en la Tabla 1 estan dedicados a eva-luar diferentes tipos y disenos de modulos MD en terminos deeficiencia termica y produccion de destilado. Sin embargo, enpocas instalaciones se hacen evaluaciones economicas de la tec-nologıa. En este sentido, solo en el trabajo de Guillen-Burriezaet al. (2015) se analizo una planta piloto SMD en terminoseconomicos, mostrando como el precio del agua ronda los 10-11.30 e/m3 para una instalacion con capacidad de 100 m3/dıa.Estos resultados demostraron la viabilidad economica de la tec-nologıa para plantas de pequeno o mediano tamano al ser com-parada con una instalacion de la misma capacidad basada en latecnologıa de osmosis inversa alimentada con energıa fotovol-taica, donde el precio ascendıa a 11.7-15.6 e/m3. No obstante,se debe destacar que se requieren trabajos en los cuales se utili-cen modulos MD mas actuales y eficientes, puesto que los pre-cios comentados anteriormente pueden ser significativamentemas bajos.
2.3. Indices de desempeno para la evaluacion de la tecno-logıa MD
Antes de describir las estrategias de modelado y control em-pleadas en la tecnologıa MD, se deben definir los ındices dedesempeno que se utilizan para evaluar los modulos MD. Esimportante comentar que no hay un ındice estandar para la eva-luacion de estos procesos y por este motivo, se pueden encon-trar varios metodos en la literatura (Ruiz-Aguirre et al., 2015).En primer lugar, para cuantificar la produccion de los modulosMD se suele utilizar el flujo de destilado por unidad de superfi-cie (D, medido en L/(h·m2)), el cual se puede calcular como:
D =md
ρd · Am· c1, (1)
donde md es el flujo masico de destilado (kg/s), ρd es la ma-sa especıfica del destilado (kg/m3), Am es la superficie de lamembrana del modulo (m2) y c1 es un factor de conversion deunidades con valor 3.6·106 (L·s/(m3·h)).
Para la evaluacion de la eficiencia termica de los modulos,en la literatura principalmente se utilizan dos ındices de desem-peno. Por un lado, la Razon de Salida Ganada (Gained OutputRatio, GOR (-)) que se define como el calor latente necesariopara evaporar todo el flujo masico de destilado producido com-parado con el calor externo aportado:
GOR =md · ∆hv
Q, (2)
donde ∆hv es la entalpıa de vaporizacion (kJ/kg) y Q es el flujode calor que se le aporta al sistema (kJ/s). Por otro lado, tam-bien se suele usar un ındice denominado Consumo Especıfi-co de Energıa Termica (Specific Thermal Energy Consumption,STEC (kWh/m3)), el cual da informacion acerca de la cantidadde energıa necesaria para producir una unidad de volumen dedestilado. El STEC se puede calcular como:
STEC =Q · ρd
md · c2·, (3)
donde c2 es un factor de conversion de unidades con valor3600 (kJ/kWh).
3. Modelado de plantas MD
En esta seccion se hace una revision de las principales tecni-cas de modelado propuestas en este campo. En primer lugar, sedescriben las tecnicas de modelado usadas para caracterizar losmodulos MD y, posteriormente, las utilizadas para modelar elresto de componentes de una planta piloto SMD como la des-crita en la subseccion anterior.
3.1. Modelado de modulos MDEl desarrollo de modelos de modulos MD, ya sean basados
en primeros principios o en datos empıricos, se ha convertidoen una herramienta fundamental para predecir el funcionamien-to de estos procesos bajo diferentes condiciones de operacion.Estos modelos no solo ayudan a analizar el comportamiento delos modulos MD bajo las condiciones de operacion requeridas,sino que tambien son esenciales para el desarrollo de tecnicasde control (Porrazzo et al., 2013; Gil et al., 2019a) y para eldesarrollo de algoritmos dirigidos a obtener un diseno optimode la planta (Chen et al., 2012). De este modo, a continuacionse hace una revision de los enfoques de modelado utilizadoshasta el momento en la literatura abordando, tanto los modelosbasados en datos experimentales como los basados en primerosprincipios.
332 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343

3.1.1. Modelos basados en datos experimentales de modulosMD
En el caso particular de la tecnologıa MD, la existencia dediferentes disenos internos (diferentes longitudes del canal, an-churas del canal, numero de canales, etc.) ası como de tipos demodulos y membranas dificulta la construccion de modelos ba-sados en primeros principios. Se debe tener en cuenta que lavariacion de estos parametros no resulta en un cambio propor-cional en el rendimiento del proceso, haciendo que no se puedaestablecer facilmente un modelo general (Ruiz-Aguirre et al.,2018). Ademas, en la mayorıa de los modulos MD a escala co-mercial no se dispone de la informacion suficiente para realizardichos modelos teoricos, por lo que se necesita una colabora-cion mas estrecha entre el mundo academico y los desarrollado-res industriales de modulos MD. Por estas razones, la mayorıade los procesos MD (especialmente los modulos comerciales)se modelan mediante modelos basados en datos experimentales.Dos de las tecnicas de modelado mas utilizadas en este cam-po son la Metodologıa de Superficie de Respuesta (ResponseSurface Methodology, RSM) y las Redes Neuronales Artificia-les (Artificial Neural Network, ANN). Estos modelos son vali-dos para ajustar procesos lineales y no lineales multivariables.Su principal ventaja radica en la rapidez a la hora de obtener-los una vez se dispone del conjunto de datos experimentales.Sin embargo, se debe tener en cuenta que no se pueden usarpara extrapolar los resultados a otros sistemas, y que son solovalidos para el rango de operacion en el cual se han obtenido.Ademas, este tipo de modelos representan directamente la sali-da final del modelo, y no permiten estudiar el fenomeno fısicoque ocurre en el sistema. Por el contrario, sı que son validospara visualizar y analizar el rango de operacion del modulo yentender el comportamiento del sistema.
La metodologıa RSM (Hill and Hunter, 1966) es una tecni-ca estadıstica que utiliza funciones cuadraticas para caracterizarprocesos lineales o con no linealidades suaves. En esta metodo-logıa se disenan campanas experimentales centradas en aplicarcambios en forma de escalon, llamados niveles, a uno de losgrados de libertad (entradas) mientras que los otros se man-tienen constantes. Posteriormente, se ajusta un modelo polino-mial en base a la respuesta experimental observada en cada ni-vel para cada variable independiente. El modelo RSM tiene lasiguiente estructura:
q = γ0 +
v∑i=1
γi · wi +
v∑i=1
γii · w2i +
v∑1≤i≤ j
γi j · wi · w j, (4)
donde v es el numero de variables, γ0 es el coeficiente de com-pensacion (offset), γi son los coeficientes de los terminos linea-les, wi y w j son entradas del modelo, γii representa los coefi-cientes de los terminos cuadraticos, γi j los coeficientes de in-teraccion entre entradas del modelo y q la salida del modelo.
Por su parte, la metodologıa ANN (mas conocida en elambito de la Automatica) consiste tambien en un modelo ma-tematico compuesto por elementos simples interconectados yorganizados en una estructura de capas, los cuales procesan in-formacion en respuesta a entradas externas tratando de imitarel comportamiento de las neuronas biologicas (Demuth et al.,2014). Esta tecnica se ha convertido en una herramienta emer-gente durante los ultimos anos en el campo de la MD ya que,
en comparacion con la tecnica RSM, es capaz de ajustar conexito casi todos los procesos no lineales, tanto estaticos comodinamicos. Ası, cobra especial importancia cuando se utilizanvariables independientes que inducen comportamientos no li-neales en el sistema, como es el caso de la salinidad de la solu-cion de alimentacion del modulo MD.
De este modo, se pueden encontrar diferentes trabajos demodelado basados en RSM en la literatura. En la mayorıade ellos se utiliza la metodologıa RSM para predecir el flu-jo de destilado, como es el caso de Fadhil et al. (2019); El-zahaby et al. (2016); Khalifa and Lawal (2016); Bouguechaet al. (2016); Mohammadi et al. (2015); Boubakri et al. (2014);Khayet and Matsuura (2011); Khayet and Cojocaru (2012a);Khayet et al. (2007). Por el contrario, solo unos pocos predicenaparte del flujo del destilado algun ındice de desempeno rela-cionado con el consumo termico del modulo como el STEC o elGOR (Gil et al., 2018c; Ruiz-Aguirre et al., 2018; Cheng et al.,2018; Ruiz-Aguirre et al., 2017; He et al., 2014). Ademas, encasi todos los trabajos se utilizan como variables de entrada latemperatura y caudal del agua de alimentacion y la temperaturaa la entrada del canal de evaporacion del modulo, y solo en Gilet al. (2018c); Mohammadi et al. (2015); Khayet et al. (2007)se incluye la salinidad del agua de alimentacion como entra-da del modelo. De forma similar, se pueden encontrar trabajosbasados en la metodologıa ANN para predecir el flujo de des-tilado como es el caso de Yang et al. (2020); Cao et al. (2016);Porrazzo et al. (2013); Khayet and Cojocaru (2013, 2012b); Ta-vakolmoghadam and Safavi (2012). Por otra parte, solo en Gilet al. (2018c); Shirazian and Alibabaei (2017) se tienen en cuen-ta como salida tambien ındices de desempeno como el STEC oel GOR. Sin embargo, unicamente en Gil et al. (2018c); Caoet al. (2016) se utiliza como entrada la salinidad del agua dealimentacion.
En base a los trabajos revisados se puede observar como lasentradas mas utilizadas en este tipo de modelos son la tempe-ratura y caudal del agua de alimentacion y la temperatura deentrada del canal de evaporacion del modulo MD, y la variablede salida mas utilizada es el flujo de destilado. Se debe destacarque solo unos pocos trabajos tienen en cuenta la salinidad comovariable de entrada en la metodologıa RSM y ademas, utilizanrangos de entrada pequenos para dicha variable. De acuerdo alas ideas presentadas en Gil et al. (2018c), la metodologıa ANNes mas adecuada para realizar modelos cuando se considera es-ta variable debido a su comportamiento no lineal. Notese que elestudio de la influencia de esta variable es importante, ya queuna de las principales aplicaciones industriales de la tecnologıaMD consiste en tratar salmueras procedentes de otras tecno-logıas de desalacion, como se vera mas adelante en la seccion 5.Tambien cabe destacar que hay pocos trabajos que utilicen co-mo variable de salida algun ındice de desempeno relacionadocon el rendimiento termico del modulo, lo cual es especialmen-te relevante, ya que es uno de los principales puntos debiles dela tecnologıa. El estudio del comportamiento de esta variablebajo diferentes condiciones de operacion puede ser determinan-te para el desarrollo comercial de la tecnologıa MD. Por ultimo,se debe destacar que muchos de los modelos desarrollados estanbasados en datos obtenidos en modulos a escala de laboratorioy solo en unos pocos trabajos (Gil et al., 2018c; Ruiz-Aguirreet al., 2018, 2017; Porrazzo et al., 2013) se utilizan modulos
Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 333

de MD a escala comercial, por lo que aun se necesita el desa-rrollo de trabajos de investigacion para estudiar y optimizar elcomportamiento de los modulos comerciales MD.
3.1.2. Modelos basados en primeros principios de modulosMD
En la literatura tambien se han presentado diferentes traba-jos tratando el modelado basado en primeros principios de estetipo de sistemas. El objetivo principal de dichos trabajos con-siste en estudiar el comportamiento temporal de los modulos enbase a diversos parametros de diseno, como son el tamano de lamembrana o su porosidad, y diferentes condiciones de opera-cion, con variaciones en temperatura de entrada a ambos cana-les del modulo, en la concentracion, y en el caudal del agua dealimentacion. A continuacion, se presenta una revision somerade estos tipos de trabajos.
En Chang et al. (2010) se presento un modelo dinamico ba-sado en balances de masa y energıa para estudiar la resistenciade transferencia de materia y calor del modulo. En Tang et al.(2011) se presento el modelo de un modulo MD mediante lametodologıa de Dinamica de Fluidos Computacional (Compu-tational Fluid Dynamics, CFD), el cual tiene como objetivoestudiar la transmision de masa y de calor en los poros de lamembranas. En Yu et al. (2011) se propuso tambien un modelobasado en CFD para analizar la transferencia de masa y materiaen un modulo MD. En Alsaadi et al. (2013) se presento un mo-delo basado en balances de energıa y masa con el objetivo depredecir el flujo de vapor de destilado. En Zhang et al. (2015)se utilizo un modelo CFD para estudiar la distribucion de vapory lıquido en la membrana del modulo. En Hayer et al. (2015)se incorporaron los efectos de la difusion de Knudsen, difusionmolecular y flujo viscoso a la metodologıa CFD para estudiarel coeficiente de polarizacion de temperatura del modulo. EnKaranikola et al. (2015) se presento un modelo basado en ba-lances de masa y energıa para estudiar los perfiles de tempera-tura y produccion de destilado del modulo. En Gustafson et al.(2016) se presento un enfoque similar al anterior, pero que per-mite tambien predecir la concentracion del destilado. En Eleiwiet al. (2016) se modelo un modulo MD mediante ecuacionesde adveccion-difusion, las cuales describen los mecanismos detransferencia de calor y de masa que se dan lugar dentro delmodulo. En Karam and Laleg-Kirati (2016) se presento un mo-delo dinamico basado en la analogıa entre los sistemas termi-cos y electricos. Este modelo captura las respuestas espacialesy temporales de la distribucion de temperatura a lo largo de ladireccion del flujo, y predice la salida del flujo de agua des-tilada. En Karam et al. (2017) se realizo un modelo con losmismos objetivos mencionados anteriormente, pero en este ca-so, el sistema se caracterizo mediante un modelo de parametrosconcentrados. En Perfilov et al. (2018) se propuso un modelode prediccion general basado en la metodologıa CFD, con elobjetivo de obtener perfiles detallados de temperatura, presion,concentracion y flujo de salida de destilado. Otro enfoque in-teresante se propuso en el trabajo de Amigo et al. (2018) en elcual se presento un modelo basado en CFD para comprender larelacion entre la hidrodinamica y el fouling. En Esfandiari et al.(2019) se introduce un modelo basado en CFD para predecir elflujo de destilado del modulo, el cual contiene ecuaciones demasa, energıa y fenomenos de transferencia de impulso.
En base a la revision realizada, se puede observar que la me-todologıa de modelado mas usada es la CFD. Esta metodologıade modelado se basa en el uso de una aproximacion numericapara simular el flujo de caudal. Ademas, esta tecnica permitepredecir temperaturas y concentraciones a lo largo del modu-lo (Hitsov et al., 2015). Del mismo modo, se puede ver comola mayorıa de estos modelos se han desarrollado para estudiary analizar los fenomenos de transferencia de materia y calordentro del modulo con el fin de optimizar su diseno y funcio-namiento. Por otra parte, se debe comentar que aunque todoslos modelos mencionados en el parrafo anterior fueron valida-dos experimentalmente, en la mayorıa de casos los datos fueronobtenidos con modulos a escala de laboratorio. Las validacio-nes de este tipo de modelos en modulos a escala comercial sonescasas y solo se pueden encontrar algunos ejemplos en la lite-ratura como es el caso de los trabajos de Winter (2015) y Hitsovet al. (2017). Una de las principales dificultades que impiden di-chas validaciones se debe a que, para el desarrollo de este tipode modelos, algunos de los fenomenos fısicos que ocurren den-tro del modulo MD se simplifican, lo que hace que los modelospierdan fiabilidad y sea mas complicado validarlos en moduloscomerciales.
3.2. Modelado de plantas SMD
Tal y como se mostro en la Figura 2, los dispositivos quese incluyen en este tipo de instalaciones, ademas del modulode MD, son los tıpicos de un campo solar termico: captado-res solares, tanques de almacenamiento aislados termicamentee intercambiadores de calor. Para este tipo de dispositivos exis-ten modelos basados en primeros principios bien conocidos yvalidados en sistemas reales en la literatura (Duffie and Beck-man, 2013). Es por esto que en la mayorıa de trabajos de mo-delado de este tipo de plantas se utilizan estos modelos (Dinget al., 2005; Chang et al., 2010; Abdallah et al., 2013; Gil et al.,2018a,b). Ademas, en Gil et al. (2019b) se adaptaron dichosmodelos a la metodologıa de modelado dinamico logico mixto(Mixed-Logical Dynamical, MLD) con el fin de representar elcaracter hıbrido de la planta SMD. Tambien se debe comentarque los trabajos de modelado en este ambito no se han limita-do a los mencionados modelos basados en primeros principios,sino que tambien se han presentado modelos basados en ANNpara modelar la planta completa (Porrazzo et al., 2013).
4. Sistemas de control para plantas SMD
Aunque la tecnologıa MD este todavıa en fase experimen-tal, se encuentra en un estado de madurez avanzado, y los tra-bajos de investigacion centrados en la mejora de las estrategiasde operacion para este tipo de sistemas estan cobrando cada vezmas importancia. En este ambito, los sistemas de control tienenun papel fundamental ya que, al utilizar una fuente de energıaintermitente como la energıa solar, se debe realizar una gestionoptima de la planta de acuerdo al comportamiento de la irra-diancia solar, la cual se puede conseguir mediante tecnicas decontrol avanzadas. En esta seccion se hace una revision de losprincipales enfoques de control aplicados hasta el momento enplantas SMD, los cuales se resumen en la Tabla 2, remarcandolos principales objetivos que se persiguen y las metodologıas decontrol empleadas.
334 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343

4.1. Objetivos
Antes de describir las metodologıas de control empleadas,se deben establecer los objetivos de control de este tipo de ins-talaciones, los cuales se pueden dividir en dos niveles. En pri-mer lugar, se pueden diferenciar los objetivos de bajo nivel, queconsisten en mantener las principales variables que intervienenen el proceso, como caudal y temperatura, en torno a valoresdeseados. Esto es fundamental para asegurar un regimen esta-cionario y poder llevar a cabo la evaluacion de los modulos endistintas condiciones de operacion. En segundo lugar, se en-cuentran los objetivos de alto nivel, los cuales estan relaciona-dos con el funcionamiento del modulo de desalacion y consis-ten en maximizar su produccion y rendimiento energetico.
Las estructuras de control de bajo nivel tienen como obje-tivo tareas clasicas de regulacion en sistemas alimentados conenergıa solar termica (Camacho et al., 2012). Ası, los objetivosque se buscan se pueden resumir en: i) controlar los distintoscaudales de la instalacion haciendo uso de los variadores defrecuencia de las bombas de la instalacion, ii) controlar la tem-peratura y rechazar las perturbaciones de radiacion actuandosobre el caudal del campo solar, y iii) mantener una tempera-tura estable a la entrada del intercambiador de calor encargadode proporcionar la energıa termica al modulo de destilacion pormembranas.
Por otra parte, los objetivos de los bucles de control de altonivel estan relacionados con la mejora de los ındices de desem-peno del modulo MD. Para establecer dichos objetivos convieneanalizar las variables que afectan al funcionamiento del modu-lo las cuales son: caudal del agua de alimentacion, temperaturade alimentacion, concentracion de la solucion de alimentacion,y temperatura a la entrada del canal de evaporacion. De estasvariables, la temperatura y concentracion del agua de alimenta-cion son perturbaciones y vienen impuestas por la solucion dealimentacion con la que se este trabajando. Por el contrario, latemperatura a la entrada del canal de evaporacion se puede ma-nipular actuando sobre los bucles de bajo nivel del campo solar,al igual que el caudal de alimentacion el cual se puede variaractuando sobre la bomba de alimentacion. Una vez descritaslas variables, los objetivos de alto nivel que se han tratado hastael momento en la literatura consiste en maximizar la produc-cion de destilado y la eficiencia energetica del modulo. Comose mostro en Ruiz-Aguirre et al. (2017, 2018), para maximizarla produccion de destilado tanto el caudal de alimentacion comola temperatura a la entrada del canal de evaporacion del modulodeben ser maximos, lo que se traduce en que los bucles de altonivel deben tratar de maximizar estas variables. Para maximi-zar la eficiencia energetica del modulo MD, se suele minimizarel ındice de desempeno STEC o maximizar el GOR, de formaque se reduzca la cantidad de energıa termica necesaria paraproducir una unidad de volumen de destilado. Para minimizarel STEC o maximizar el GOR la temperatura a la entrada delcanal de condensacion tambien debe ser maxima (Ruiz-Aguirreet al., 2017, 2018) sin embargo, en la mayorıa de modulos MDel caudal de alimentacion debe ser mınimo (al contrario que pa-ra maximizar la produccion de destilado). Este hecho da a lugara problemas de optimizacion multiobjetivo en el caso de que setenga en cuenta tanto la produccion de destilado como el STEC,tal y como se presento en Gil et al. (2018c).
4.2. Lazos de control basicos/clasicos
En esta subseccion se revisan las arquitecturas de controlde bajo nivel propuestas para plantas SMD. Se debe mencionarque la mayorıa de las estructuras de control incluidas en esteapartado utilizan lazos de control simples basados en contro-ladores todo/nada y controladores Proporcionales, Integrales yDerivativos (PID) (Mercader et al., 2019). Del mismo modo,los sistemas de control desarrollados para los objetivos de bajonivel en plantas SMD suelen incorporar controladores anticipa-tivos los cuales se utilizan como complemento a los controla-dores por realimentacion con el fin de mejorar el seguimiento areferencias y el rechazo a perturbaciones. Una descripcion masdetallada de estos tipos de sistemas de control se puede encon-trar en Åstrom and Hagglund (2006).
En Chang et al. (2010) se presento una arquitectura de con-trol de bajo nivel compuesta por controladores todo/nada y con-troladores PI para mantener la temperatura de entrada al inter-cambiador de calor de un planta SMD a un nivel deseado a pe-sar de las perturbaciones de radiacion. En Chen et al. (2012) sepropusieron dos modos de control basados en controladores PI,uno para el dıa, el cual estaba encargado de controlar la tem-peratura a la entrada del intercambiador de calor manipulandoel caudal de entrada por la parte del campo solar del tanque dealmacenamiento, y otro para la noche, encargado de controlardicha temperatura manipulando el caudal de entrada del tanquede almacenamiento termico por la parte del intercambiador decalor. En Porrazzo et al. (2013) se presento un enfoque de con-trol mas completo el cual utiliza un control anticipativo basadoen un modelo de red neuronal que proporciona la referencia decaudal de alimentacion del modulo MD en base a las condicio-nes de operacion de las principales perturbaciones del sistema:irradiancia y temperatura del agua de alimentacion. En la Figu-ra 3 se presenta el diagrama esquematico de la arquitectura decontrol propuesta. Ademas, se debe destacar que esta arquitec-tura de control se probo experimentalmente en la planta SMDdescrita en Cipollina et al. (2012), a diferencia de los dos tra-bajos mencionados previamente los cuales fueron desarrolladosen simulacion.
En Gil et al. (2018b) se presento y probo experimentalmenteen la planta SMD de la PSA una arquitectura de control com-pleta para el sistema de generacion de energıa termica de la ins-talacion. La arquitectura de control tiene como objetivo prin-cipal mantener la temperatura a la entrada del intercambiadorde calor a un nivel deseado. Para ello, se desarrollaron diferen-tes bucles de control clasicos encargados de controlar la tem-peratura a la salida del campo solar (bucle de control 1 en laFigura 4), la temperatura a la entrada del intercambiador de ca-lor (bucle de control 3 en la Figura 4), y el caudal a la entradadel intercambiador de calor (bucle de control 4 en la Figura 4).Los bucles de control de las tres ultimas variables menciona-das estan basados en controladores PID clasicos. Por el contra-rio, para controlar la temperatura a la salida del campo solarse utilizo un esquema de control en cascada (ver Figura 5). Eneste esquema, el controlador esclavo tiene como objetivo con-trolar el caudal del campo solar actuando sobre el variador defrecuencia de la bomba del mismo. Por su parte, el controla-dor maestro se encarga de controlar la temperatura de salidadel campo solar actuando sobre el caudal. Ademas, este esque-ma de control en cascada incluye un controlador anticipativo
Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 335
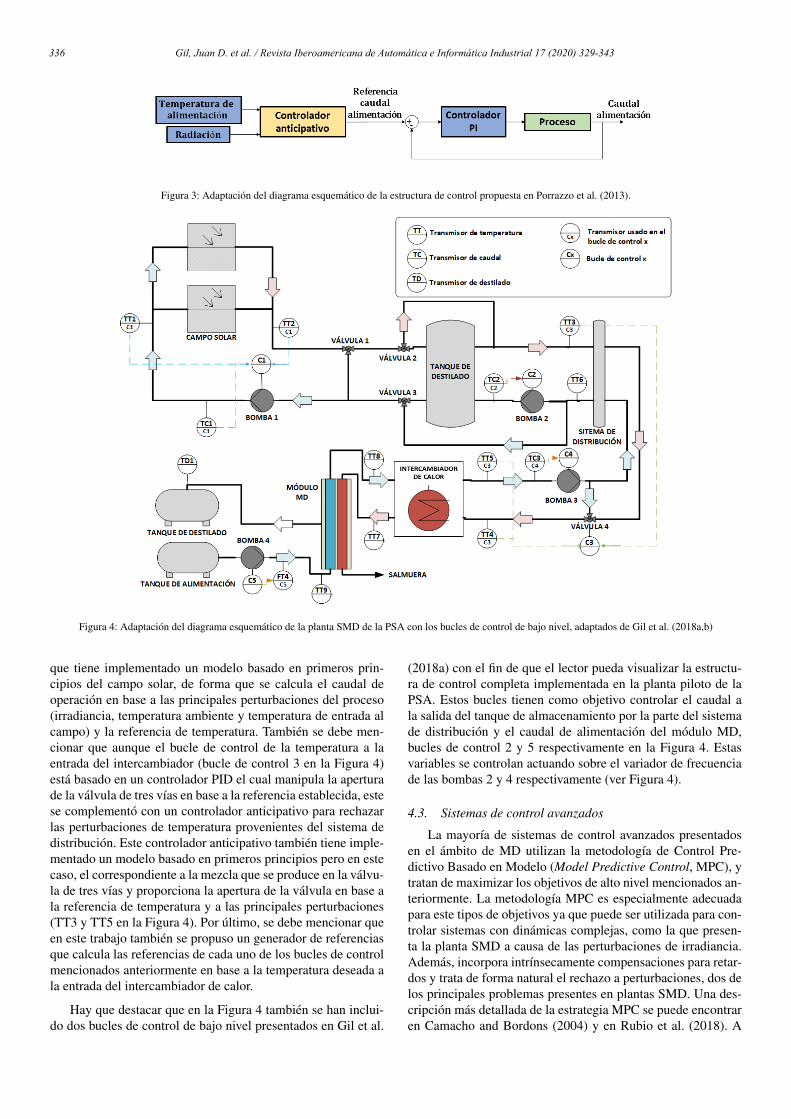
Figura 3: Adaptacion del diagrama esquematico de la estructura de control propuesta en Porrazzo et al. (2013).
Figura 4: Adaptacion del diagrama esquematico de la planta SMD de la PSA con los bucles de control de bajo nivel, adaptados de Gil et al. (2018a,b)
que tiene implementado un modelo basado en primeros prin-cipios del campo solar, de forma que se calcula el caudal deoperacion en base a las principales perturbaciones del proceso(irradiancia, temperatura ambiente y temperatura de entrada alcampo) y la referencia de temperatura. Tambien se debe men-cionar que aunque el bucle de control de la temperatura a laentrada del intercambiador (bucle de control 3 en la Figura 4)esta basado en un controlador PID el cual manipula la aperturade la valvula de tres vıas en base a la referencia establecida, estese complemento con un controlador anticipativo para rechazarlas perturbaciones de temperatura provenientes del sistema dedistribucion. Este controlador anticipativo tambien tiene imple-mentado un modelo basado en primeros principios pero en estecaso, el correspondiente a la mezcla que se produce en la valvu-la de tres vıas y proporciona la apertura de la valvula en base ala referencia de temperatura y a las principales perturbaciones(TT3 y TT5 en la Figura 4). Por ultimo, se debe mencionar queen este trabajo tambien se propuso un generador de referenciasque calcula las referencias de cada uno de los bucles de controlmencionados anteriormente en base a la temperatura deseada ala entrada del intercambiador de calor.
Hay que destacar que en la Figura 4 tambien se han inclui-do dos bucles de control de bajo nivel presentados en Gil et al.
(2018a) con el fin de que el lector pueda visualizar la estructu-ra de control completa implementada en la planta piloto de laPSA. Estos bucles tienen como objetivo controlar el caudal ala salida del tanque de almacenamiento por la parte del sistemade distribucion y el caudal de alimentacion del modulo MD,bucles de control 2 y 5 respectivamente en la Figura 4. Estasvariables se controlan actuando sobre el variador de frecuenciade las bombas 2 y 4 respectivamente (ver Figura 4).
4.3. Sistemas de control avanzados
La mayorıa de sistemas de control avanzados presentadosen el ambito de MD utilizan la metodologıa de Control Pre-dictivo Basado en Modelo (Model Predictive Control, MPC), ytratan de maximizar los objetivos de alto nivel mencionados an-teriormente. La metodologıa MPC es especialmente adecuadapara este tipos de objetivos ya que puede ser utilizada para con-trolar sistemas con dinamicas complejas, como la que presen-ta la planta SMD a causa de las perturbaciones de irradiancia.Ademas, incorpora intrınsecamente compensaciones para retar-dos y trata de forma natural el rechazo a perturbaciones, dos delos principales problemas presentes en plantas SMD. Una des-cripcion mas detallada de la estrategia MPC se puede encontraren Camacho and Bordons (2004) y en Rubio et al. (2018). A
336 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343

Figura 5: Adaptacion del diagrama esquematico del controlador en cascada para la temperatura del campo solar presentado en Gil et al. (2018b).
continuacion se muestran los principales enfoques de controlaplicado a plantas SMD en este sentido.
En Karam and Laleg-Kirati (2015) se presento un sistemade control en tiempo real basado en la metodologıa MPC y enla tecnica de busqueda del extremo de Newton. El objetivo dela estructura de control consiste en maximizar la produccionde destilado actuando sobre el caudal de alimentacion y tenien-do en cuenta las perturbaciones de temperatura de alimentaciony temperatura a la entrada al canal de evaporacion del modu-lo. Los resultados en simulacion mostraron como el controla-dor busco en cada momento el maximo de la funcion objetivo(la maxima produccion de destilado posible) dependiendo de latemperatura de la alimentacion. En Gil et al. (2018a) se pro-puso un enfoque mas complejo basado en una arquitectura decontrol jerarquica de dos capas que fue probada experimental-mente en la planta SMD de la PSA. El diagrama esquematicode la arquitectura de control se muestra en la Figura 6. En es-ta estructura, la capa superior esta formada por un controladorMPC no lineal el cual calcula las referencias optimas para la ca-pa de control directa, formada por los bucles de control de bajonivel propuestos en Gil et al. (2018b). Se debe mencionar que lacapa superior incluye metodos de prediccion de perturbacionesy que la capa inferior cuenta con controladores anticipativos pa-ra rechazar perturbaciones. Ademas, se propusieron dos modosde control para la operacion eficiente de la instalacion SMD enbase a las condiciones de operacion, al igual que un procedi-miento de arranque automatico para el campo solar y el moduloMD. La arquitectura de control fue probada tanto en simulacioncomo en la planta real, utilizando tres funciones objetivo dife-rentes en la capa superior del controlador jerarquico, las cua-les tratan de maximizar la produccion de destilado, minimizarel STEC y la relacion entre la produccion de destilado y loscostes de operacion. Los resultados obtenidos mostraron como,en comparacion con una operacion manual, la produccion dedestilado se puede mejorar en 14-20 L/dıa (5-7 %), el consumotermico se puede reducir entre 0.41-1.21 kWh/m3 (0.5-1 %) ylos costes se pueden disminuir entre 0.11-0.14 e/m3 (9-10 %)dependiendo de la funcion objetivo utilizada en la capa supe-rior.
En Gil et al. (2019b) se presento una mejora al trabajomencionado anteriormente desarrollando un controlador MPChıbrido, el cual incluye un modelo MLD de la instalacion SMD.Este hecho permite considerar la naturaleza hıbrida de la plantaen la formulacion del problema de control, teniendo en cuentacambios entre modos de operacion a lo largo del horizonte deprediccion. El objetivo principal de la arquitectura de controlconsistio en maximizar el numero de horas de operacion de la
instalacion ası como la produccion de destilado. El controla-dor se probo en simulacion, utilizando el modelo de la plantaSMD de la PSA. Los resultados mostraron como la operacionse puede alargar en un 11 %, mientras que la produccion dedestilado se aumenta en un 1.40 % en comparacion con opera-ciones manuales. En Bendevis et al. (2020) se propuso un con-trolador simplificado libre de modelo, obtenido a partir de unaestrategia MPC. El controlador resultante incluye dos modos deoperacion, uno para el dıa y otro para la noche, en los que se uti-liza un controlador bang-bang y un controlador con consignasfijas respectivamente. El objetivo de la tecnica propuesta con-sistio en maximizar la produccion de destilado de un moduloMD actuando sobre el caudal de alimentacion del mismo. Losresultados en simulacion mostraron como se puede aumentarla produccion mensual en torno al 30 % en comparacion conuna operacion manual. Por ultimo, en Guo et al. (2020) se pre-sento una estrategia de control MPC basado en un observadorde estados no lineal para maximizar la produccion de destiladodel modulo MD. Ademas, en el problema de optimizacion dela estrategia MPC se tuvieron en cuentan los costes economi-cos asociados a la operacion de la bomba de alimentacion delmodulo MD.
Figura 6: Adaptacion del diagrama esquematico de la estructura de controljerarquica propuesta en Gil et al. (2018a).
5. Sistemas de control para aplicaciones MD industriales:Combinacion entre plantas SMD e invernaderos
Como se ha mencionado anteriormente, la tecnologıa MDes interesante en campos donde otras tecnologıas de separacionno pueden ser aplicadas. Ası, es especialmente relevante su ha-bilidad para trabajar con soluciones de alimentacion con altaconcentracion, lo que convierte a MD en una solucion sosteni-ble para tratar las salmueras producidas por otras tecnologıasde desalacion como la osmosis inversa, lo cual fue ensayado
Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 337

Tabla 2: Enfoques de control existentes hasta la fecha para plantas SMD.Referencia Tipo de estudio Metodologıas de control ObjetivosChang et al. (2010) Simulacion Controladores ON/OFF De bajo nivel: mantener una temperatura
Controladores PID estable a la entrada del intercambiador decalor por la parte del campo solar.
Chen et al. (2012) Simulacion Controladores PID De bajo nivel: mantener una temperaturaestable a la entrada del intercambiador decalor por la parte del campo solar.
Porrazzo et al. (2013) Experimental Controladores PID De bajo nivel: controlar el caudal deControladores anticipativos alimentacion del modulo MD en base a las
perturbaciones de radiacion y temperaturade alimentacion.
Gil et al. (2018b) Experimental Controladores PID De bajo nivel: mantener una temperaturaControladores anticipativos estable a la entrada del intercambiador deControladores en cascada calor por la parte del campo solar.
Karam and Laleg-Kirati (2015) Simulacion Controlador MPC De alto nivel: maximizar la produccionde destilado
Gil et al. (2018a) Experimental Controlador jerarquico De alto nivel: maximizar produccionControlador MPC no lineal de destilado, minimizar STEC y reducirControladores PID la relacion entre costes de operacion y
produccion de destilado.∗Los tres objetivos mencionadosse probaron por separado.
Gil et al. (2019b) Simulacion Controlador MPC hıbrido De alto nivel: maximizar la produccionde destilado del modulo MD y sus horasde operacion.
Bendevis et al. (2020) Simulacion Controlador libre de modelo De alto nivel: maximizar la produccionde destilado del modulo MD.
Guo et al. (2020) Simulacion Controlador MPC De alto nivel: maximizar la produccionde destilado del modulo MD.
a escala piloto en Gil et al. (2018c). Ademas, aparte de lascaracterısticas mencionadas en la seccion 2.1, MD destaca yaque es menos complicada y barata de instalar que otras tecno-logıas, tiene pocos requerimientos de mantenimiento, y el ensu-ciamiento de la membrana es mınimo. Todas estas caracterısti-cas permiten que las plantas SMD puedan ser totalmente au-tomatizadas, desarrollando plantas de desalacion de pequeno-medio tamano autonomas, que puedan ser implantadas en luga-res donde otras tecnologıas de desalacion no sean viables desdeel punto de vista tecnico o economico.
Una de las posibles aplicaciones de la tecnologıa MD con-siste en alimentar cultivos en zonas aisladas y cercanas a la cos-ta. Tal y como se propuso en Gil et al. (2019a), Almerıa (surestede Espana) es una de las zonas potenciales de aplicacion de di-cha tecnologıa debido a la creciente escasez de agua que estasufriendo y las grandes superficies de cultivo bajo invernade-ro que tiene, las cuales se han convertido en el principal motoreconomico de la provincia. Sin embargo, para que la combi-nacion entre plantas SMD e invernaderos sea exitosa, se debendesarrollar estrategias de control que gestionen en tiempo realla instalacion SMD de acuerdo a las condiciones de irradianciay a la demanda de agua variable de los cultivos. La Figura 7presenta el diagrama esquematico del caso de estudio adoptadoen Gil et al. (2019a) para analizar la viabilidad de este tipo deinstalaciones operadas mediante tecnicas de control avanzadas.Como se puede apreciar, en este tipo de instalaciones indus-triales hay una diferencia principal respecto a las plantas piloto
SMD estudiadas hasta el momento en la literatura (ver Figu-ra 2); la unidad de desalacion que ya no esta compuesta por unsolo modulo MD sino que se requieren multiples modulos parasatisfacer las necesidades de agua. Esto es debido a que la pro-duccion de destilado de los modulos MD comerciales actualeses relativamente baja, en torno a 60 L/h en condiciones de ope-racion optimas (Andres-Manas et al., 2020b). Ası, las estrate-gias de control propuestas hasta ahora en la literatura centradasen objetivos de bajo nivel, como mantener la temperatura deentrada al intercambiador de calor por la parte del campo solaren niveles deseados, siguen siendo validas. Por el contrario, lainclusion de multiples modulos MD en la unidad de desalacioncambia totalmente el paradigma de control de las estrategiaspropuestas para maximizar la produccion de destilado o la efi-ciencia termica en plantas piloto, lo que requiere la formulacionde nuevos enfoques de control. En Gil et al. (2019a) se propusoun controlador distribuido MPC encargado de calcular los cau-dales optimos de alimentacion para cada modulo MD, tratandode minimizar el consumo termico especıfico de la unidad dedesalacion al mismo tiempo que se satisface los requerimien-tos de agua del invernadero. En la formulacion del controlador,cada modulo MD se considero como un agente independientede modo que, cada agente resuelve un problema MPC con losobjetivos mencionados anteriormente, intercambiando informa-cion solamente con los agentes vecinos. Los resultados mostra-ron como el problema de control se resuelve de una forma maseficiente en terminos temporales que con una estrategia centra-
338 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343

Figura 7: Adaptacion del diagrama esquematico del caso de estudio utilizado en Gil et al. (2019a).
lizada y que, el consumo termico de la planta se puede llegara reducir en un 5 % de media respecto a operaciones manuales.Estos ahorros significan que para una superficie de 8 ha, se pue-de llegar a ahorrar 50 MWh de energıa termica por campana, locual puede ser muy relevante para tener en cuenta en la fase dediseno de la planta y en la operacion diaria de la misma.
No obstante, los resultados presentados en Gil et al. (2019a)se pueden seguir mejorando si se introducen variables binariasen el problema de control que permitan encender y apagar losmodulos MD dependiendo de los requerimientos de agua del in-vernadero. El problema de control MPC a resolver en ese casose puede formular de forma general como:
mın J =
4∑i=1
N∑j=1
STECi(t + j|t). (5)
Sujeto a:4∑
i=1
N∑j=1
Pi(t + j|t) ≤N∑
j=1
D(t + j|t), (6)
∀i = 1, 2, 3, 4 y∀ j = 0, . . . ,N − 1:
δi(t + j) · Qmin ≤ Qi(t + j) ≤ δi(t + j) · Qmax (7)
δi(t + j) ∈ {0, 1}, (8)
donde STECi(t + j|t) es el STEC para cada uno de los moduloi, con i = 1, 2, 3, 4, de los mostrados en la Figura 7, calculadopara el instante de tiempo t + j con la informacion disponibleen el instante t. Pi(t + j|t) es la produccion de destilado de cadamodulo en L/h y D(t + j|t) la demanda de agua del invernaderoen L/h. Qmin y Qmax son los rangos de caudal maximo y mıni-mo de cada modulos MD los cuales, para los modulos utiliza-dos (los mismos que en Gil et al. (2019a)), son 400 y 600 L/hrespectivamente y Qi es el caudal de agua de alimentacion delmodulo i. Las variables δi estan referidas a la posicion 0-1 delas valvulas V1, V2, V3 y V4 de la Figura 7, donde 0 significavalvula cerrada, es decir modulo apagado y 1, modulo encendi-do. Por ultimo N es el horizonte de prediccion. Como se puedeapreciar, el problema de control consiste en minimizar el valor
del STEC total de la planta, asegurando que la produccion dela planta MD sea mayor que los requerimientos de agua del in-vernadero. Se debe resaltar que el STEC para cada modulo secalcula de acuerdo a la ecuacion (3) mientras que la produccionde destilado con los modelos RSM presentados en Gil et al.(2019a). Del mismo modo, se debe remarcar que las variablesde decision del problema son Qi y δi, ∀i = 1, 2, 3, 4. Ademas,es importante destacar que si δi es igual a 0 entonces, tanto elSTEC como la produccion de destilado del modulo i tambienlo son. Notese que el problema de optimizacion resultante esun problema de Optimizacion Entera Mixta No Lineal (MixedInteger Non Linear Optimization, MINLP).
Con el objetivo de visualizar los resultados que se puedenllegar a conseguir se ha realizado una simulacion representativacon datos reales de temperatura y demanda de agua obtenidosde la PSA y la Estacion Experimental de la Fundacion Cajamar(ubicada tambien en la provincia de Almerıa) respectivamente.Ademas, se han comparado los resultados obtenidos con unaoperacion manual con consignas estaticas de 500 L/h para elagua de alimentacion de cada modulo y con todos los modulosencendidos en todo momento. Los resultados se presentan en laFigura 8.
En la Figura 8-2 se puede apreciar, que los ahorros deenergıa termica son considerables al aplicar la tecnica de con-trol cuando se consideran demandas de agua variables comola del invernadero. El STEC medio de la operacion automaticaes de 412.80 kWh/m3, mientras que el de la operacion manualde 1142.2 kWh/m3. Se puede observar como el mayor ahorro seproduce al inicio y final del dıa ya que el controlador solo arran-ca los modulos necesarios para cubrir la demanda de agua. Estehecho puede ser muy relevante en aplicaciones industriales, yaque permite no tener que sobredimensionar el campo solar o lafuente de energıa termica, lo que supone un ahorro economicoen la fase de diseno. Del mismo modo, en la Figura 8-3 se pue-de ver como la demanda de agua del invernadero se satisface entodo momento.
Se debe remarcar que el caso simulado con cuatro modulosMD y un invernadero de tamano 392 m2 corresponde a un ca-
Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343 339

60
65
70
75
80
Tem
pera
tura
[oC
]
(1)Temperatura campo solar
0
500
1000
1500S
TE
C [kW
h/m
3]
(2) STECOperación manual
STECOperación automática
0 10 20 30 40 50 60 70 80 90
Tiempo [Muestras]
0
20
40
60
80
100
Caudal [L
/h]
(3)
Producción MDOperación manual
Producción MDOperación automática
Demanda invernadero
Figura 8: Comparacion de resultados entre una operacion automatica y una manual.
so de estudio a escala piloto. Informacion mas detallada acercadel caso de estudio se puede encontrar en el trabajo Gil et al.(2019a). Ademas, se ha utilizado un horizonte de prediccionpequeno de N = 5 con un tiempo de muestreo de 10 min ylos modelos con los que se trabajan son estaticos de acuerdoa la metodologıa RSM. En casos reales con superficies de cul-tivos mas grandes, el numero de modulos requeridos aumentaconsiderablemente, por lo que aumenta tambien el numero devariables binarias en el problema y, por tanto, los problemascombinatorios y de no convexidades asociados a los problemasde optimizacion MINLP.
6. Retos futuros
Aunque en la bibliografıa especializada se pueden encon-trar una gran cantidad de contribuciones cientıficas relaciona-dos con el modelado y, en menor medida, con el control enMD, existen numerosos retos futuros y brechas por cubrir en laliteratura en ambas areas, las cuales se resumen a continuacion.
En lo que concierne a los modelos basados en datos expe-rimentales, los trabajos futuros deben estar centrados en mode-lar modulos comerciales considerando la eficiencia termica deestos como un parametro de salida del modelo. La eficienciatermica es un parametro crucial en estos tipos de procesos ali-mentados con energıa termica y ademas, destaca como uno delos puntos mas debiles de la tecnologıa. Por esta razon, es de-terminante incluir este parametro como salida de los modelos,pudiendo ası analizar su comportamiento bajo diferentes condi-ciones de operacion y permitiendo que se tenga en cuenta a lahora de disenar plantas MD, lo cual puede ayudar a la correctaimplementacion industrial de la tecnologıa. Del mismo modo,se debe incluir la concentracion del agua de alimentacion comoparametro de entrada de los modelos, lo cual ha sido breve-mente discutido en la literatura hasta el momento. Este hechopermite estudiar la aplicacion de modulos MD para tratar sal-mueras procedentes de otras plantas de desalacion, una de lasramas de aplicacion con mas futuro de la tecnologıa MD. Res-pecto a los modelos basados en primeros principios, la principalbrecha observada radica en que estos tipos de modelos han sido
principalmente validados a escala de laboratorio. Las simpli-ficaciones asumidas a la hora de realizar estos modelos hacenque su validacion con modulos comerciales sea difıcil de lle-var a cabo. Ası, se requieren nuevos trabajos de investigaciondedicados a desarrollar modelos mas detallados y precisos quepuedan ser ajustados y calibrados para modulos MD comercia-les. Ademas, de manera general es importante destacar la nece-sidad de definir una norma enfocada a homogeneizar la calidadde los resultados evaluados durante las campanas experimenta-les, tanto para procesos de obtencion de modelos como para lapropia evaluacion de los modulos MD empleados. Esta normadeberıa especificar bajo que criterios se pueden dar como vali-dos los valores experimentales obtenidos y su aplicacion darıacomo resultado la garantıa de los resultados proporcionados.
Por otra parte, las lıneas de investigacion abiertas relaciona-das con el control automatico de procesos MD son aun mayo-res ya que, tal y como se ha podido ver a lo largo del presenteartıculo, se han presentado muy pocos trabajos en este ambi-to hasta el momento. En este sentido, los tipos de trabajos decontrol se pueden dividir en dos partes de acuerdo a los obje-tivos de control que se persiguen. Desde el punto de vista deobjetivos de bajo nivel los trabajos futuros son mas limitados,ya que esta rama se centra principalmente en controlar el siste-ma de generacion de energıa termica de la instalacion SMD, elcual esta basado en un campo solar termico. Para este tipo desistemas se han presentado numerosas publicaciones detallandoarquitecturas de control precisas y testadas experimentalmente(Camacho et al., 2012; Rubio et al., 2018). Por el contrario, sehan presentado muy pocos trabajos centrados en objetivos dealto nivel como maximizar la produccion de destilado o la efi-ciencia termica del modulo. Ademas, en los enfoques propues-tos, estos ındices de desempeno se tratan por separado los cua-les en la mayorıa de casos requieren condiciones de operacioncontrapuestas (Gil et al., 2018c). Por lo que uno de los trabajosque quedan por abordar consiste en desarrollar algoritmos decontrol multiobjetivo que gestionen en tiempo real (Rodrıguez-Blanco et al., 2018) la instalacion SMD tratando de maximizarambos objetivos. Del mismo modo, se requiere la inclusion determinos economicos en la estrategias de control de forma que
340 Gil, Juan D. et al. / Revista Iberoamericana de Automática e Informática Industrial 17 (2020) 329-343
Para seguir leyendo, inicie el proceso de compra, click aquí