reporte practica 1 csll
DESCRIPTION
asTRANSCRIPT
25-9-2015
Benemérita Universidad Autónoma de Puebla FACULTAD DE CIENCIAS DE LA
ELECTRÓNICA
Aldo Amador Hernandez Victor Miguel Herrera Guzmán Jesús Silvestre Salgado Meza Luis Ubaldo García Delgado Daniel Juárez Pérez
Para el 25 de septiembre del 2015
Práctica 1
Control de sistemas lineales
1. Introducción
1.- Introducción al análisis temporal
En el análisis de un sistema de control siempre es necesario calcular un modelo matemático del mismo.
Deberemos tener en cuenta que en la práctica se usará lo más cercano a un escalón unitario.
La respuesta temporal es la evolución en el tiempo de un sistema cuando se le introduce una entrada,
y está formada por dos componentes: Respuesta transitoria: es la que va desde el estado inicial hasta el
final y la respuesta estacionaria: es la forma en la que la salida se comporta cuando t tiende a infinito.
A la hora de analizar y diseñar sistemas de control hay que tener una base de comparación del
funcionamiento de los diversos sistemas. Para ello estableceremos como señales estándar de estudio
las siguientes funciones: impulso, escalón y la rampa.
Para el diseño del sistema, se debe poder predecir el comportamiento dinámico del sistema, cuya
característica más importante es la estabilidad absoluta.
Un sistema de control lineal invariante es estable, si finalmente la salida retorna a un estado de
equilibrio cuando el sistema es sometido a una perturbación.
Un sistema de control lineal invariante es inestable, si la salida oscila indefinidamente o si la salida
diverge sin límite de su estado de equilibrio cuando sometemos al sistema a una perturbación.
Los sistemas reales de control involucran componentes de retardo que no permiten a la salida seguir
inmediatamente las variaciones de la entrada. Es, por tanto, frecuente una respuesta transitoria con
oscilaciones amortiguadas antes de alcanzar un estado de equilibrio. Una vez llegado al estado
estacionario, si la salida no coincide exactamente con la entrada, se dice que el sistema tiene un error
estacionario. Este error indica la exactitud del sistema.
2. Objetivos Analizar sistemas lineales de primer orden y segundo orden
1. Hallar la función de transferencia de un circuito.
2. Simular el circuito con algún programa.
3. Ver la respuesta del sistema como función de transferencia usando Matlab.
4. Implementar el circuito.
5. Diseñar un circuito de grado uno, y otro de grado dos.
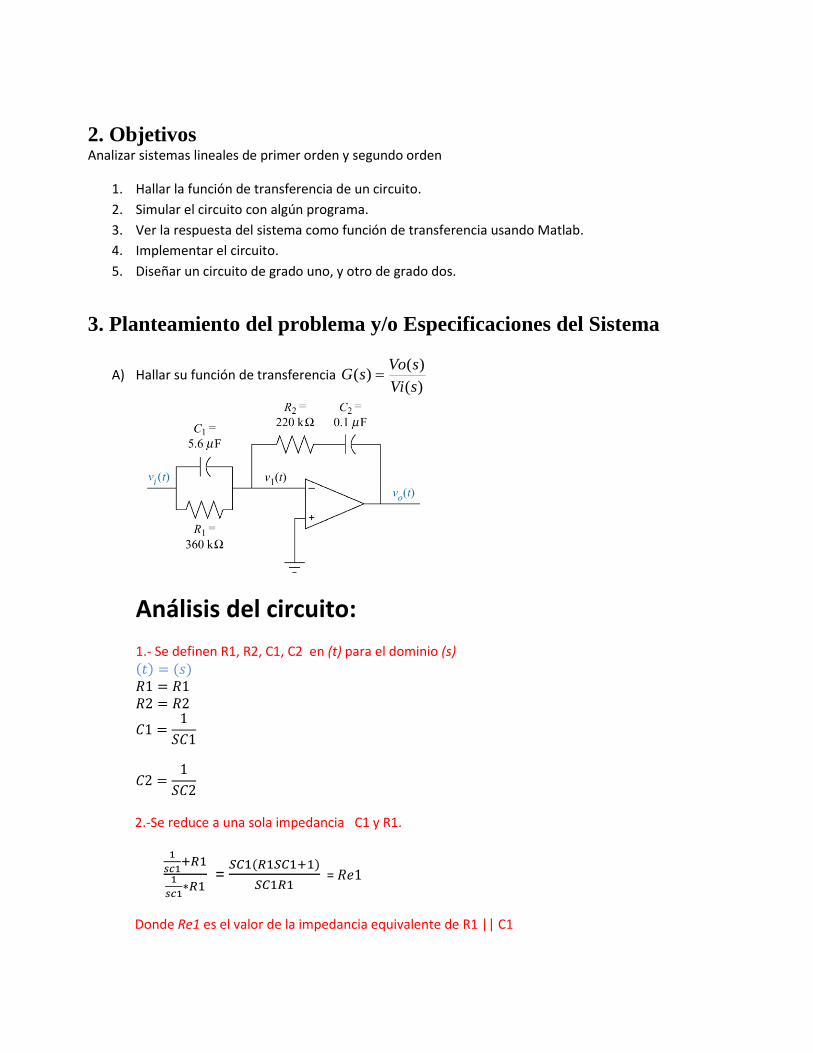
3. Planteamiento del problema y/o Especificaciones del Sistema
A) Hallar su función de transferencia )(
)()(
sVi
sVosG
Análisis del circuito: 1.- Se definen R1, R2, C1, C2 en (t) para el dominio (s) (𝑡) = (𝑠) 𝑅1 = 𝑅1 𝑅2 = 𝑅2
𝐶1 =1
𝑆𝐶1
𝐶2 =1
𝑆𝐶2
2.-Se reduce a una sola impedancia C1 y R1.
1
𝑠𝑐1+𝑅1
1
𝑠𝑐1∗𝑅1
= 𝑆𝐶1(𝑅1𝑆𝐶1+1)
𝑆𝐶1𝑅1 = 𝑅𝑒1
Donde Re1 es el valor de la impedancia equivalente de R1 || C1

3.- se reduce a una sola impedancia C2 Y R2.
𝑅2 +1
𝑆𝐶2 = 𝑅𝑒2 Donde Re2 es el valor de la impedancia equivalente de R2 - - C2
4.- Sabemos que por la naturaleza del OpAmp el voltaje en el pin de entrada no inversor denominado V (+) se ve reflejado en el pin de entrada inversor V (-), así que se asume que dado un voltaje 0 en V(+) también hay 0 V en V(-) . A este fenómeno se le llama tierra virtual. Por lo tanto ocurre lo siguiente en el nodo llamado V1. Donde 𝑉1 = 0𝑉
𝑉𝑖(𝑆) − 𝑉1
𝑅𝑒1=
𝑉1 − 𝑉𝑜(𝑆)
𝑅𝑒2
𝑉𝑖(𝑆) − 0
𝑅𝑒1=
0 − 𝑉𝑜(𝑆)
𝑅𝑒2
𝑉𝑖(𝑆)
𝑅𝑒1=
−𝑉𝑜(𝑆)
𝑅𝑒2
Despejando Vi y el (-1) de Vo(S) resulta:
− 𝑅𝑒2
𝑅𝑒1=
𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
5.-sustituimos el valor de las impedancias equivalentes Re1 y Re2 en la ecuación anterior
- 𝑅2+
1
𝑆𝐶2
𝑆𝐶1(𝑅1𝑆𝐶1+1)
𝑆𝐶1𝑅1
= 𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
− 𝑅2𝑆𝐶2+1
𝑆𝐶2𝑆𝐶1(𝑅1𝑆𝐶1+1)
𝑆𝐶1𝑅1
= 𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
−𝑆𝐶1𝑅1𝑅2𝑆𝐶2+𝑅1𝑆𝐶1
𝑆𝐶2𝑆𝐶12𝑅1+𝑆𝐶1𝑆𝐶2 =
𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
−𝑅1𝑅2𝑆𝐶2+𝑅1
𝑆𝐶2𝑆𝐶1𝑅1+𝑆𝐶2 =
𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
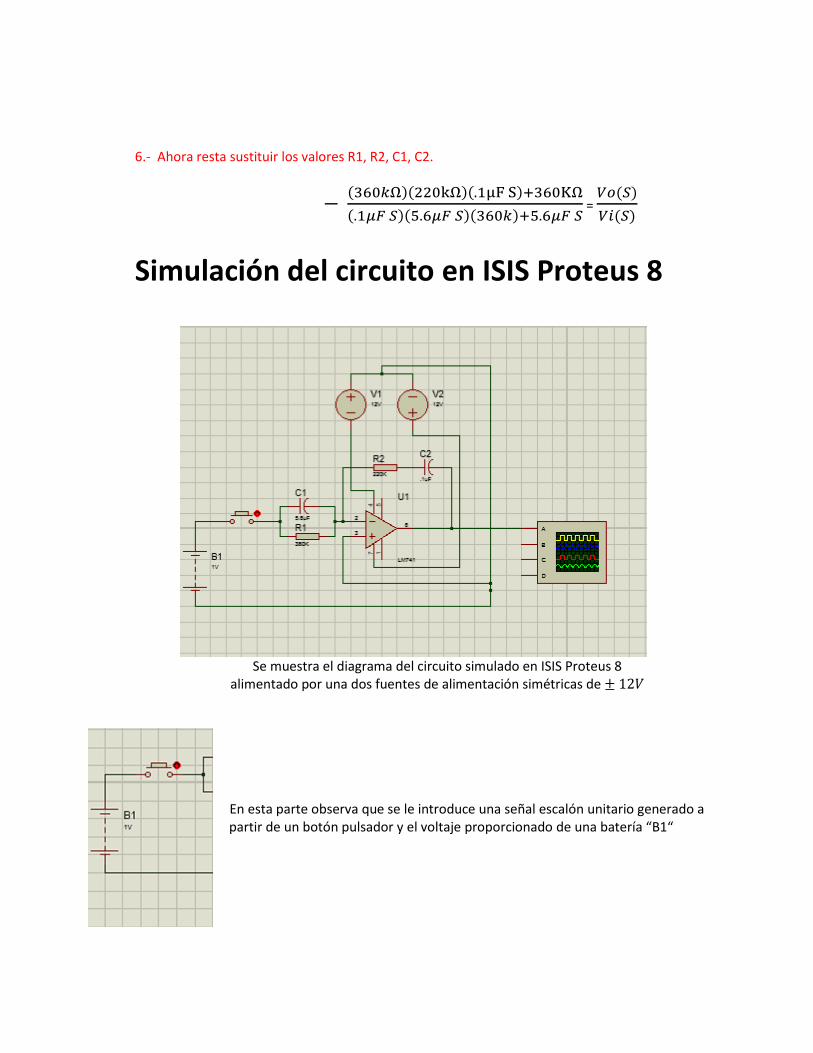
6.- Ahora resta sustituir los valores R1, R2, C1, C2.
− (360𝑘Ω)(220kΩ)(.1μF S)+360KΩ
(.1𝜇𝐹 𝑆)(5.6𝜇𝐹 𝑆)(360𝑘)+5.6𝜇𝐹 𝑆 =
𝑉𝑜(𝑆)
𝑉𝑖(𝑆)
Simulación del circuito en ISIS Proteus 8
Se muestra el diagrama del circuito simulado en ISIS Proteus 8
alimentado por una dos fuentes de alimentación simétricas de ± 12𝑉
En esta parte observa que se le introduce una señal escalón unitario generado a partir de un botón pulsador y el voltaje proporcionado de una batería “B1“

Se muestra la forma de onda que nos devuelve el circuito después de aplicar señal escalón unitaria (simulación)
Moviendo un poco la resolución del osciloscopio nos resulta en esta gráfica, se observa que aproximadamente 3.50 segundos la señal cruza por cero para tomar un valor positivo de voltaje y vuelve a descender para tocar el cero aproximadamente en 29.30 segundos.

Por consiguiente la señal permanece en un valor de voltaje positivo aproximadamente 25.40 segundos y con voltaje pico positivo de 900mV.

Simulación del circuito en matlab. Se hizo uso de software adecuado para procesamiento de señales y análisis matemático llamado Matlab. En esta imagen se observa la aproximación de la simulación a la obtenida en osciloscopio e ISIS Proteus 8
Aquí se incluye el código introducido en Matlab que da como resultado la gráfica anterior. >> num=[-367920];
>> den=[.0000002016, .0000001];
>> G=tf(num,den)
G =
-367920
-------------------
2.016e-07 s + 1e-07
Continuous-time transfer function.
>> step(G,170)
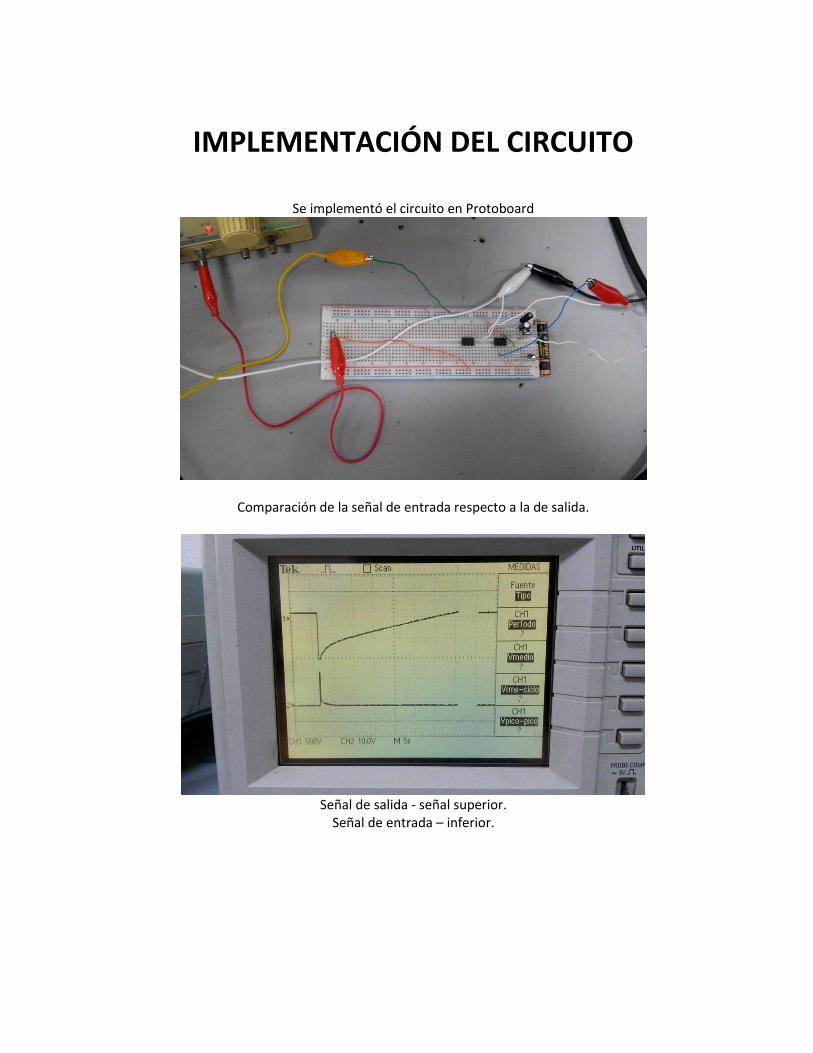
IMPLEMENTACIÓN DEL CIRCUITO
Se implementó el circuito en Protoboard
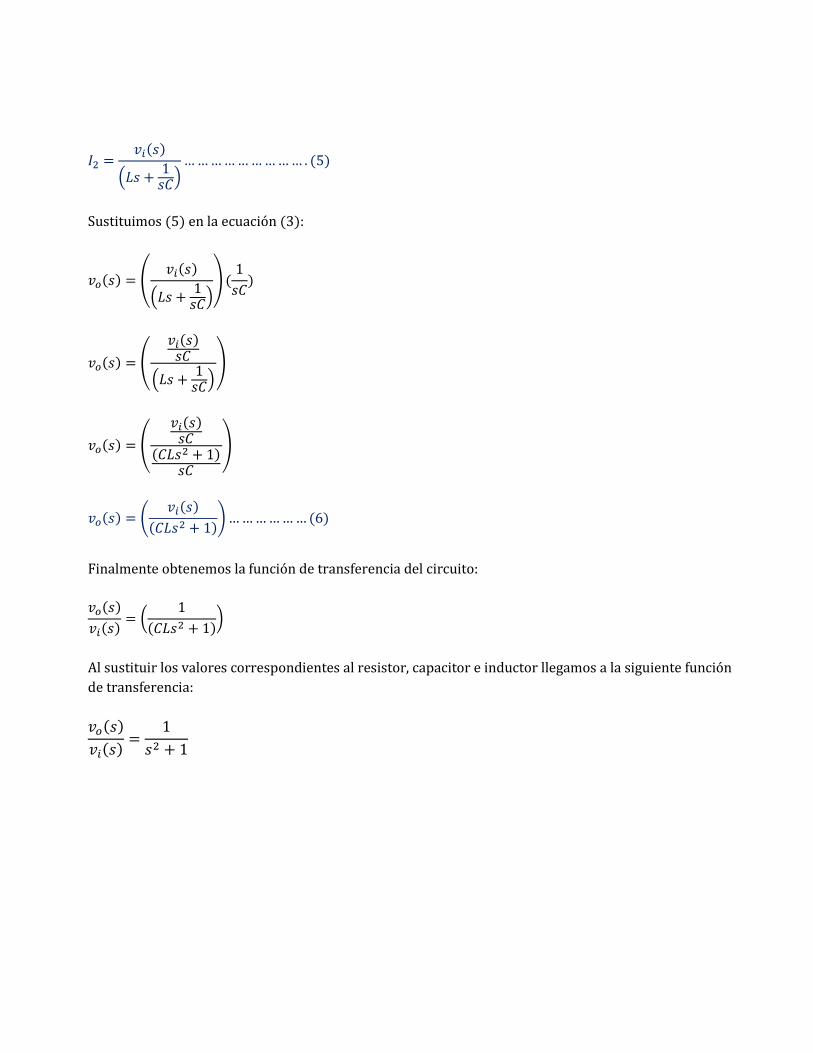
Comparación de la señal de entrada respecto a la de salida.
Señal de salida - señal superior.
Señal de entrada – inferior.

DISEÑO CIRCUITO RLC CON DENOMINADOR GRADO 1:
Del sistema se obtienen las siguientes ecuaciones:
𝑣𝑖(𝑠) = 𝐼1(𝐿𝑠) − 𝐼2(𝐿𝑠) … … … … … … (1)
0 = 𝐼2 (𝐿𝑠 + 𝑅 +1
𝑠𝐶) − 𝐼1(𝐿𝑠) … … … (2)
𝑣𝑜(𝑠) = 𝐼2(𝑅) … … … … … … … … … . (3)
De la ecuación (1) despejamos 𝐼1:
𝐼1 =𝑣𝑖(𝑠) + 𝐼2(𝐿𝑠)
(𝐿𝑠)… … … … … … … … (4)
Sustituimos (4) en la ecuación (2) para obtener 𝐼2:
0 = 𝐼2 (𝐿𝑠 + 𝑅 +1
𝑠𝐶) − (
𝑣𝑖(𝑠) + 𝐼2(𝐿𝑠)
(𝐿𝑠)) (𝐿𝑠)
𝐼2 (𝐿𝑠 + 𝑅 +1
𝑠𝐶) = (
𝑣𝑖(𝑠) + 𝐼2(𝐿𝑠)
(𝐿𝑠)) (𝐿𝑠)
𝐼2 (𝐿𝑠 + 𝑅 +1
𝑠𝐶) = 𝑣𝑖(𝑠) + 𝐼2(𝐿𝑠)
𝐼2 (𝐿𝑠 + 𝑅 +1
𝑠𝐶− 𝐿𝑠) = 𝑣𝑖(𝑠)

𝐼2 (𝑅 +1
𝑠𝐶) = 𝑣𝑖(𝑠)
𝐼2 =𝑣𝑖(𝑠)
(𝑅 +1
𝑠𝐶)
… … … … … … … … … … (5)
Sustituimos (5) en la ecuación (3):
𝑣𝑜(𝑠) = (𝑣𝑖(𝑠)
(𝑅 +1
𝑠𝐶)
) (𝑅)
𝑣𝑜(𝑠) = (𝑣𝑖(𝑠)𝑅
(𝑅 +1
𝑠𝐶))
𝑣𝑜(𝑠) = (𝑣𝑖(𝑠)
(𝑠𝐶𝑅 + 1)𝑠𝐶
)
𝑣𝑜(𝑠) = (𝑠𝐶𝑣𝑖(𝑠)
(𝐶𝑅𝑠 + 1)) … … … … … … (6)
Finalmente obtenemos de (6) la función de trasferencia del circuito:
𝑣𝑜(𝑠)
𝑣𝑖(𝑠)=
𝑠𝐶
𝐶𝑅𝑠 + 1
Al sustituir los valores correspondientes al resistor, capacitor e inductor llegamos a la siguiente función
de transferencia:
𝑣𝑜(𝑠)
𝑣𝑖(𝑠)=
𝑠
𝑠 + 1

DISEÑO CIRCUITO RLC CON DENOMINADOR DE GRADO 2:
𝑣𝑖(𝑠) = 𝐼1(𝑅) − 𝐼2(𝑅) … … … … … … (1)
0 = 𝐼2 (𝑅 + 𝐿𝑠 +1
𝑠𝐶) − 𝐼1(𝑅) … … … (2)
𝑣𝑜(𝑠) = 𝐼2(1
𝑠𝐶) … … … … … … … … … . (3)
De la ecuación (1) despejamos 𝐼1:
𝐼1 =𝑣𝑖(𝑠) + 𝐼2(𝑅)
(𝑅)… … … … … … … … (4)
Sustituimos (4) en la ecuación (2) para obtener 𝐼2:
0 = 𝐼2 (𝑅 + 𝐿𝑠 +1
𝑠𝐶) − (
𝑣𝑖(𝑠) + 𝐼2(𝑅)
(𝑅)) (𝑅)
𝐼2 (𝑅 + 𝐿𝑠 +1
𝑠𝐶) = (
𝑣𝑖(𝑠) + 𝐼2(𝑅)
(𝑅)) (𝑅)
𝐼2 (𝑅 + 𝐿𝑠 +1
𝑠𝐶) = 𝑣𝑖(𝑠) + 𝐼2(𝑅)
𝐼2 (𝑅 + 𝐿𝑠 +1
𝑠𝐶− 𝑅) = 𝑣𝑖(𝑠)
𝐼2 (𝐿𝑠 +1
𝑠𝐶) = 𝑣𝑖(𝑠)
𝐼2 =𝑣𝑖(𝑠)
(𝐿𝑠 +1
𝑠𝐶)
… … … … … … … … … . (5)
Sustituimos (5) en la ecuación (3):
𝑣𝑜(𝑠) = (𝑣𝑖(𝑠)
(𝐿𝑠 +1
𝑠𝐶)
) (1
𝑠𝐶)
𝑣𝑜(𝑠) = (
𝑣𝑖(𝑠)𝑠𝐶
(𝐿𝑠 +1
𝑠𝐶))
𝑣𝑜(𝑠) = (
𝑣𝑖(𝑠)𝑠𝐶
(𝐶𝐿𝑠2 + 1)𝑠𝐶
)
𝑣𝑜(𝑠) = (𝑣𝑖(𝑠)
(𝐶𝐿𝑠2 + 1)) … … … … … … (6)
Finalmente obtenemos la función de transferencia del circuito:
𝑣𝑜(𝑠)
𝑣𝑖(𝑠)= (
1
(𝐶𝐿𝑠2 + 1))
Al sustituir los valores correspondientes al resistor, capacitor e inductor llegamos a la siguiente función
de transferencia:
𝑣𝑜(𝑠)
𝑣𝑖(𝑠)=
1
𝑠2 + 1

4. Marco Teórico
Hablando, analizando la respuesta de un sistema, un sistema es lineal si la salida sigue fielmente los cambios
producidos en la entrada.
En la mayoría de los sistemas de control lineales, la salida debe seguir la misma forma de la entrada, pero en
los casos que la salida no verifique la misma forma de la entrada, para ser considerado un sistema lineal la
salida deberá reflejar los mismos cambios generados en la entrada.
Por ejemplo, un integrador puro, es un operador lineal, ante una entrada escalón produce a la salida una señal
rampa, la salida no es de la misma forma de la entrada, pero si la entrada escalón varía en una constante, la
rampa de salida se verá modificada en la misma proporción. De la linealidad del sistema se desprenden dos
propiedades importantes:
a) Si las entradas son multiplicadas por una constante, las salidas también son multiplicadas por la misma
constante.
b) Los sistemas lineales se caracterizan por el hecho de que se puede aplicar el principio de superposición.
5. Desarrollo del Experimento o Sistema
Para la realización y correcta ejecución de la práctica se procedió de la siguiente manera enumerando los
pasos.
1) Se realizó el análisis del circuito para encontrar su función de transferencia. El circuito se encuentra
en función del tiempo (t), por lo tanto su análisis resulta complicado si se mantiene en ese dominio.
Tomando esto en consideración se hizo la conversión de los componentes al dominio de la frecuencia
(s) los cuales quedarían en términos de impedancias.
Siguiendo los fundamentos de circuitos, y conociendo las características y configuración del OpAmp
se obtuvo la función de transferencia del circuito.
2) Se elaboró la simulación del circuito por medio de software especial para diseño y simulación de
circuitos electrónicos (ISIS Proteus 8).
Una vez elaborado se ejecutó y mostro una señal de salida con condiciones ideales.

3) Se realizó una simulación de la señal de salida por medio de software especial para análisis
matemático y procesamiento de señales (Matlab) introduciendo los valores de la función de
transferencia y obteniendo como resultado una gráfica que se aproxima con los valores obtenidos
mediante la simulación del software especial para diseño y simulación de circuitos electrónicos(ISIS
Proteus 8).
4) Después de analizar el circuito teóricamente y su comportamiento fue implementado en Protoboard
Para Hacer este Circuito Físicamente Necesitamos:
1.- 1 Protoboard
2.- 1 Resistencia de 220 K Ohm
3.- 2 Resistencias de 180 K Ohm (conectados en serie)
4.- 1 Capacitor de 0.1 Microfaradio
5.- 1 Capacitor de 4.7 Microfaradio (conectado en paralelo)
6.- 1 Capacitor de 1 Microfaradio (conectado en paralelo)
7.- 1 OpAmp Ua741
8.- 1 Botón pulsador generalmente abierto
9.- 1 Pila de 1V
Configuración de conexiones del OpAmp Ua741 obtenida de la hoja de datos proporcionada por el fabricante.
Una vez implementado el circuito se hizo uso de un osciloscopio para mostrar la señal de salida respecto de la entrada.
5) Se diseñó un circuito con componentes RLC(Resistencia, Inductor, capacitor), condicionados por la instrucción de un polinomio en el denominador de grado 1
6) Posteriormente se realizó otro circuito condicionado por la instrucción de un polinomio en el
denominador de grado 1
6. Análisis de Resultados Se logró obtener una aproximación de la señal de salida del circuito a partir de la simulación del circuito y se observó que coincidían notablemente las pruebas experimentales respecto del análisis teorico. Surgieron ligeras complicaciones a la hora de la implementación del circuito, el equipo del laboratorio un poco deficiente y fallas en los equipos. Exceptuando eso no hubo mayor problema.
7. Conclusiones
Concluimos que efectivamente un correcto análisis teórico y múltiples formas de simulación es fundamental a la hora de la implementación de circuitos, dado que en el análisis teórico muestra los inconvenientes que pudieran haber con fenómenos físicos y por consiguiente un mal funcionamiento del circuito. Hubo algunos errores al momento del análisis teórico pero consideramos que la práctica continua evitara en el futuro estos errores. Consideramos que se cumplió el objetivo de la práctica ya que se aprendió de esta experiencia.
8. Referencias y Bibliografía 1.- Ogata, Katsuhiko. Ingeniería de Control Moderna. Prentice Hall, 4ª Edición, 1997.
2.- Kuo, Benjamin. Sistemas de Control automático. Prentice Hall, 7ª Edición.
3.- http://www.ti.com/lit/ds/symlink/ua741.pdf
4.- http://shpat.com/docs/grayhill/pushbuttons.pdf
9. Apéndices
En esta práctica numero 1 de la materia de control, tomamos la decisión de dividir el trabajo ya que fueron 6
puntos los cuales teníamos que cubrir y siendo 5 integrantes quedó de la siguiente forma:
a) Daniel Juárez.- Paso 1 y Paso 2
* Función de Transferencia &
*Simular Circuito.
b) Luis Ubaldo.- Paso 3
*Simular en Matlab
c) Víctor Herrera.- Paso 4
* Implementación del Circuito
d) Aldo.- Paso 5 & 6
* Diseño de Circuito de polinomio Grado 1
* Diseño de Circuito de polinomio Grado 2
e) Jesús.- Reporte de Practica
Al concluir los incisos todos los integrantes del equipo analizamos, comparamos y verificamos el correcto
desarrollo de la práctica Ya que teníamos las actividades repartidas y recurriendo al laboratorio de Auto acceso
pudimos juntar las diferentes informaciones para poder terminar esta práctica.