relacion de velocidad en diferentes mecanismos de transmision
TRANSCRIPT
RELACION DE VELOCIDAD EN MECANISMOS DE TRANSMISION CON DIFERENTES SISTEMAS
MECANISMOS
ING. OSCAR CHAPARRO
INTEGRANTES
CRISTHIAN IVAN CARDENAS MARIN; COD
DIEGO HINCAPIÉ VILLA; COD 310017
CRISTHIAN ANDRES RENDON; COD
CATALINA TABARES
UNIVERSIDAD NACIONAL DE COLOMBIASede Palmira
20 NOVIEMBRE 2013

RESUMEN
El presente informe se compone de seis prácticas en el taller de mecanismos y herramientas; una práctica; donde se describe y analizara diferentes tipos de correas, piñones poleas, utilizadas en diferentes sistemas; y 5 prácticas; donde equipos eléctricos y no eléctricos presentan mecanismos de transmisión en diferentes sistemas como; poleas y correas, ruedas de fricción, engranajes, ruedas dentadas y cadenas, tornillo sinfín, rueda helicoidal y rueda dentada; donde se describirá en cada practica que sistema presenta y partes lo componen. Obteniendo como; Objetivo principal hallar la relación de velocidad en cada caso; experimentalmente y compararlo frente al teórico; ya sea medido la velocidad con el dispositivo electrónico (tacómetro) o hallando su velocidad angular o circular manualmente.
INTRODUCCIÓN Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz en un movimiento deseado en la salida (conducido). La trasformación de la fuerza y el movimiento producido, generalmente por un motor, se suele realizar mediante cadenas cinemáticas, que son sistemas de elementos mecánicos convenientemente conectados entre sí para transmitir potencia mecánica del elemento motriz a la carga propiamente dicha.Estos elementos mecánicos, a su vez, suelen ir montados sobre los llamados ejes de transmisión, que son piezas cilíndricas sobre las cuales se colocan los mecanismos de transmisión correspondientes y que serán los encargados de transmitir el movimiento de una parte a otra del sistema. Entre los mecanismos de transmisión más importantes empleados en la transmisión de potencia mecánica a través de cadenas cinemáticas, podemos destacar: sistemas de poleas y correas, sistemas de ruedas de fricción, sistemas de engranajes, sistemas de ruedas dentadas y cadenas, sistemas de tornillo sinfín y rueda helicoidal, sistemas de rueda dentada y cremallera, etc.
MARCO TEORICO
“SISTEMAS DE TRANSMISIÓN DE POLEAS Y CORREAS”
Se emplean para transmitir la potencia mecánica proporcionada por el eje del motor entre dos ejes separados entre sí por una cierta distancia. La transmisión del movimiento por correas se debe al rozamiento éstas sobre las poleas, de manera que ello sólo será posible cuando el movimiento rotórico y de torsión que se ha de transmitir entre ejes sea inferior a la fuerza de rozamiento. El valor del rozamiento depende, sobre todo, de la tensión de la correa y de la resistencia de ésta a la tracción; es decir, del tipo de material con el que está construida (cuero, fibras, hilos metálicos recubiertos de goma, etc.) y de sus dimensiones.
LAS POLEASSon ruedas con una o varias hendiduras en la llanta, sobre las cuales se apoyan las correas.
LAS CORREAS Son cintas cerradas de cuero y otros materiales que se emplean para transmitir movimiento de rotación entres dos ejes generalmente paralelos. Pueden ser de forma plana, redonda, trapezoidal o dentada.Este sistema se emplea cuando no se quiere transmitir grandes potencias de un eje a otro. Su principal inconveniente se debe a que el resbalamiento de la correa sobre la polea produce pérdidas considerables de potencia; sobre todo en el arranque. Para evitar esto parcialmente se puede utilizar una correa dentada, que aumenta la sujeción.
“MECANISMO MULTIPLICADOR Y REDUCTOR DE VELOCIDAD”
Se denomina mecanismo multiplicador de velocidad; a aquél que transforma la velocidad recibida de un elemento motor (velocidad de entrada) en otra velocidad mayor (velocidad de salida).
Se denomina mecanismo reductor de velocidad; a aquél que transforma la velocidad de entrada en una velocidad de salida menor.
En todo mecanismo de transmisión existen como mínimo dos ejes, llamados eje motriz y eje conducido. El eje motriz es el que genera el movimiento y puede estar acoplado a un motor o ser accionado manualmente por medio de una manivela. El eje conducido es el que recibe el movimiento generado por el eje motriz.
La velocidad de giro de los ejes se puede medir de dos formas
Velocidad circular (n) en revoluciones o vueltas por minuto (r.p.m.). Velocidad angular (w) en radianes por segundo (rad/seg).
La expresión matemática de r.p.m. a rad/seg es: w = (2 * p * n) / 60
“TRANSMISIÓN SIMPLE”Cuando un mecanismo se transmite directamente entre dos ejes (motriz y conducido), se trata de un sistema de transmisión simple.Si se consideran dos peleas de diámetros "d1" y "d2" que giran a una velocidad "n1" y "n2" respectivamente, al estar ambas poleas unidas entre sí por medio de una correa, las dos recorrerán el mismo arco, en el mismo periodo de tiempo.d1 * n1 = d2 * n2
De donde se deduce que los diámetros son inversamente proporcionales a las velocidades de giro y, por tanto, para que el mecanismo actúe como reductor de velocidad, la polea motriz ha de ser de menor diámetro que la polea conducida. En caso contrario actuará como mecanismo multiplicador.
“RELACIÓN DE TRANSMISIÓN” r = velocidad de salida / velocidad de entradar = n2 / n1 = d1 / d2Cuando r es mayor que 1 es un sistema multiplicador.Cuando r es menor que 1 es un sistema reductor.
“TRANSMISIÓN COMPUESTA”Cuando un movimiento se transmite entre más de dos árboles o ejes de transmisión se dice que se trata de un sistema de transmisión compuesta.
“SISTEMA DE CADENAS Y PIÑONES”Mediante este sistemas se consiguen transmitir potencias relativamente altas entre dos ejes distantes entre sí, sin que exista resbalamiento o desprendimiento entre las dos ruedas de piñones y la cadena, que es el elemento de enlace que las une.
Este sistema consta de dos ruedas dentadas (piñones) montados sobre dos ejes paralelos y sobre las cuales se adentras los eslabones flojamente articulados que componen la cadena, de manera que al hacer girar una de ellas (rueda motriz) arrastra a la otra (rueda conducida). El movimiento rotatorio y el movimiento de torsión se trasmiten entre ejes por la tracción entre la cadena y las ruedas dentadas.Para evitar problemas de pérdida de velocidad por el resbalamiento de la cadena será necesario que ésta se mantenga suficientemente tensa, lo cual se consigue a base de ruedas tensoras dentadas. Además, un sistema de este tipo necesita de un mantenimiento continuo de lubricación para reducir el deterioro y el desajuste entre la cadena y los piñones, así como el funcionamiento ruidoso de éste.
Para este sistema se cumplen las mismas expresiones que en un sistema de poleas de transmisión simple.

“SISTEMA DE RUEDAS DE FRICCIÓN”Este sistema de transmisión consiste en hacer resbalar dos o más ruedas que se tocan entre sí y montadas sobre ejes paralelos mediante la fuerza que produce el rozamiento entre ambas. Para poder transmitir movimiento de un eje a otro será necesario que ambas ruedas estén en contacto, ejerciendo una cierta presión la una sobre la otra.
Al contrario de lo que sucedía en el sistema de poleas y en el de cadenas, en este tipo de mecanismo el sentido de giro del eje motriz será contrario al del eje conducido.
Generalmente este tipo de sistema solamente se usa cuando se pretenden transmitir pequeñas potencias, y que al estar en contacto una rueda con otra se produce, por resbalamiento, una pérdida de velocidad. Otro inconveniente del uso de estas ruedas es su continuo desgaste debido a que funcionan por rozamiento y por presión. DESARROLLO DE PRÁCTICAS
A continuación se presenta detalladamente cada practica; con los datos, cálculos y resultados obtenidos.
(Practica 5)
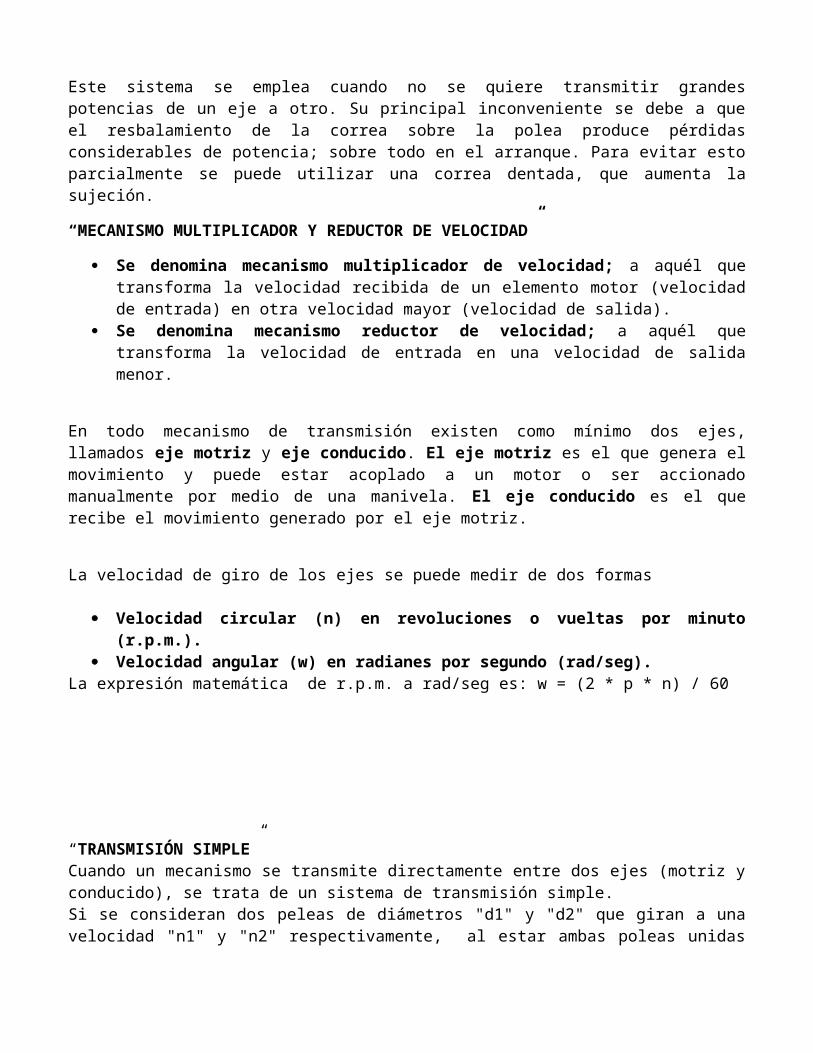
“SISTEMA CON CADENA Y PIÑONES” (Reducción de velocidad)
Esta transmisión presenta un sistema simple; estructurado en dos fases, la fase 1 con cadenas dobles; alimentado inicialmente por un motor eléctrico de 1800 (rpm). Y la fase 2 presenta una cadena sencilla y una reducción velocidad
Nomenclatura
nm = número de revoluciones en el eje motrizZm= número de dientes en el eje motriz
Zc= número de dientes en el eje conducido L = Longitud P = PasoC= centro entre ejes

Formulas:
numero deeslabones= LP
relaci onde velocidad=r= Z cZ m
velocidadnc=nmr
Fase 1
El Sistema presenta cadena y piñón doble; don se en reduce la velocidad.
Datos, cálculos y resultadosDatosP= 1,3 cmL = 130 cmZm= 20 Zc= 40C= 68nm= 1770 rpm (tacómetro)
CALCULOS FASE 1
numero deeslabones=(130÷1.3 )=100relacion de velocidad=r=(40÷20 )=2velocidadnc=(1770÷2 )=885 rpm
FASE 2
Sistema que presenta una cadena simple y para dar una reducción de velocidadDatos, cálculos y resultados:P= 1,3 cmL = 198 cmZm= 20 Zc= 80C= 38 cm
nm= 885 rpm (Experimental)
CALCULOS FASE 2
numero deeslabones=(198÷1.3 )=152relacionde velocidad=r=(60÷20 )=3
velocidadnc=(885÷3 )=295 rpmResultados Comparativo en las 2 fases de velocidad motriz y conducida en el sistema
de cadenas y piñones
Fases Velocidades Experimental (rpm) Rv Teórico Tacómetro (rpm)
fase 1nm ---- 1770
nc 885 884
fase 2nm 885 884
nc 295 295,6
SISTEMA CON POLEAS Y CORREAS” (Reducción de velocidad)
Esta transmisión presenta un sistema simple; estructurado en dos fases, donde presenta características como; correas tipo B, lisas y en V, y poleas en V; alimentado por un motor eléctrico con capacidad inicial de 1800 (rpm). Pero ya realizado el montaje, su capacidad mayor; medido con el tacómetro fue de 950 rpm; lo cual se tomara como dato inicial para la velocidad motriz del sistema
NOTA; se determinó que el comportamiento del motor se debe al desgaste del mismo; por lo cual entre mayor tensión entre poleas y correas; su capacidad inicial se calcula en un 52.8%. Generando una velocidad de 950 rpm
Nomenclaturanm = número de revoluciones en el eje motriz inicialᴓm= diámetro de la polea motrizᴓc= diámetro de la polea conducida L = Longitud de correa

C= centro entre ejes
Formulas:
relacion de velocidad=r= ∅ c∅ m
velocidadnc=∩mr
L=∅m+∅ c2
π+2C
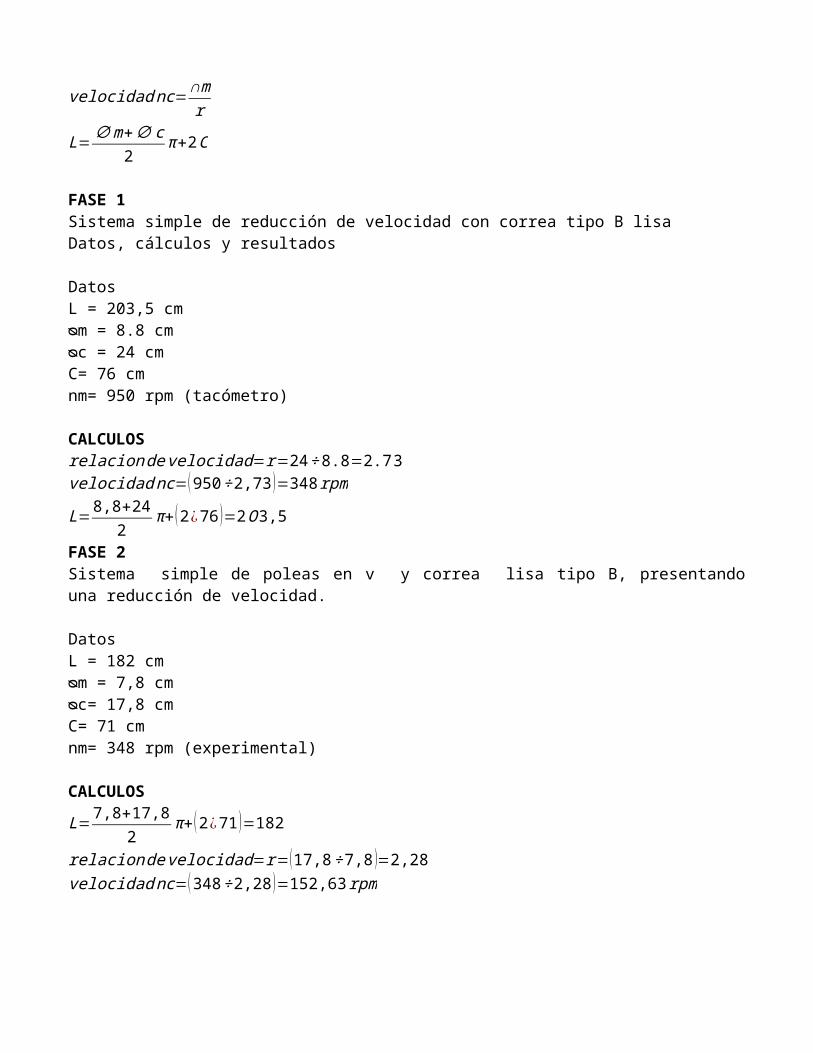
FASE 1Sistema simple de reducción de velocidad con correa tipo B lisaDatos, cálculos y resultados
DatosL = 203,5 cmᴓm = 8.8 cm ᴓc = 24 cmC= 76 cmnm= 950 rpm (tacómetro)
CALCULOSrelacion de velocidad=r=24÷8.8=2.73velocidadnc=(950÷2,73 )=348 rpm
L=8,8+242
π+(2¿76 )=2O 3,5
FASE 2Sistema simple de poleas en v y correa lisa tipo B, presentando una reducción de velocidad.
DatosL = 182 cmᴓm = 7,8 cm ᴓc= 17,8 cmC= 71 cmnm= 348 rpm (experimental)
CALCULOS
L=7,8+17,82
π+(2¿71 )=182
relacion de velocidad=r=(17,8÷7,8 )=2,28velocidadnc=(348÷2,28 )=152,63 rpm

Resultados Comparativo en las 2 fases de velocidad motriz y conducida en el sistema de poleas y correas
Fases Velocidadesexperimental (rpm) Rv
Teórico Tacómetro (rpm)
fase 1Nm ---- 950
Nc 348 352
fase 2Nm 348 352
Nc 152,63 146,7
Practica 3
TORNO
Presenta un sistema simple de poleas y correas, con un motor eléctrico de 1800 rpm, la cual se compone en 2 fases; donde la segunda fase, se logra obtener tres velocidades ajustables de (reducción y aumento) a partir de la fase inicial manualmente en el interior del sistema; desplazado las correas entre motriz y conducido.
Nomenclaturanm = número de revoluciones en el eje motriz inicialᴓm= diámetro de la polea motrizP= perímetroᴓc = diámetro de la polea conducida L = Longitud correaC= centro entre ejes
Formulas:
relacion de velocidad=r= ∅ c∅ m
velocidadnc=∩mr
diametro=ϕ= pπ
L=∅m+∅ c2
π+2C
FASE 1
Sistema simple de reducción de velocidad, con una correa tipo B, lisa, trapeidozal y polea para el eje motriz en V, lo cual por su dificultad para medir su diámetro se resolvió medir su perímetro; con el cual través de formula; se obtuvo su diámetro. La polea del conducido presenta forma plana.Datos, cálculos y resultados:
DatosL = 92,3 cmϕm= 5,73 cm ϕc= 25 cmP= 18 cmC= 22 cmnm= 1780 rpm (tacómetro)
CALCULOS
diametro delmotriz=ϕ= 183,1416
=5,73 cm
relacion de velocidad=r= 255,73
=4,36
velocidadnc=(1780÷ 4,36 )=407,3 rpm
L=(5,72+252
∗π )+(2∗22)=92,3
FASE 2
Sistema en el cual consta de 3 poleas en V, en diferentes diámetros para el motriz y tres poleas para el conducido planas, con igualdad de diámetros que la motriz; pero en diferentes posiciones; presenta una correa lisa; tipo B, trapeidozal, donde de acuerdo a la necesidad del operario puede modificar su velocidad cambiando la correa manualmente en el eje motriz y alineándola respecto a la polea del conducido, lo cual se da que el sistema presente 3 opciones velocidad ya sea; de igualdad, reducción y aumento según sea el caso. Para calcular el diámetro en el sistema de 3 poleas en V, se tomó como medida inicial su perímetro en el cual por formula de determino su diámetro.
Datos, Cálculos y Resultados
C= 35 cm nm= 407,3 rpm (experimental)
Diámetros de velocidad 1Perímetro motriz=40 cm
ϕm= 40
3,1416= 12,7 cm
Perímetro conducido = 22 cm
ϕc= 22
3,1416= 7 cm
Diámetros de velocidad 2Perímetro motriz = 30 cm
ϕm= 30
3,1416= 9,5 cm
Perímetro conducido 30

ϕc= 30
3,1416= 9,5 cm
Diámetros de velocidad 3Perímetro motriz= 22 cm
ϕm= 22
3,1416= 7 cm
Perímetro conducido= 40
ϕc= 40
3,1416= 12,7 cm
Cálculos experimentales para las 3 velocidades en el Torno
VELOCIDAD 1relacion de velocidad=r=(7÷12.7 )=0.6<1(aumenta)velocidadnc=(407.3÷0,6 )=678.8 rpm
VELOCIDAD 2relacion de velocidad=r=(9,5÷9,5 )=1velocidadnc=(407.3÷1 )=407 ,3 rpm
VELOCIDAD 3relacion de velocidad=r=(12,7÷7 )=1 .8>1(reduce)velocidadnc=(407.3÷1,8 )=226 rpm
Resultados Comparativo en las 2 fases de velocidad motriz y conducida en el TORNO
fase 1velocidades experimental (rpm) Teórico Tacómetro (rpm)
velocidadnm ---- 1780
Reducenc 407.3 373,16
fase 2velocidades experimental (rpm) Teórico Tacómetro (rpm)
velocidad 1nm 407.3 373.16
Aumentanc 678.8 505.3
velocidad 2nm 407.3 373.16
Igualnc 407.3 373.16
velocidad 3nm 407,3 313.16
Reducenc 226 151.8
Nota: la diferencia que presenta las velocidades experimental respecto a lo teórico (tacomonetro) se estima que puede existir un patina-miento de las poleas.
