prototipo corrector del error ionosférico de
TRANSCRIPT

5/10/2018 Prototipo corrector del error ionosf rico de - slidepdf.com
http://slidepdf.com/reader/full/prototipo-corrector-del-error-ionosferico-de 1
Prototipo corrector del error ionosférico delos observables GPS en tiempo real y en
post-procesoPedro Roldán-González, Raul Orús, Manuel Hernández-Pajares, J.Miguel Juan, Jaime Sanz, Ernest
Bosch, Julià TalayaResearch group of Astronomy and Geomatics (gAGE)
Universitat Politècnica de Catalunya (UPC)e-mail : [email protected] e-mail : [email protected]
Abstract- Navigation with errors below 10 centimeters, at
regional and continental scales, is feasible with satellite
navigation systems such as GPS or GALILEO, when accurate
real-time ionosphere corrections are computed. A real-time
ionospheric corrections preliminary implementation was
already developed by the authors, to calculate and provide a
ionosphere model to the final users. In order to study the
potential applications and the performance of such system, a
prototype that corrects (either in real-time or post-process) the
code and phase observables of RINEX formatted data using the
ionospheric corrections has been developed. In this work, a
brief description of the prototype design, operation and
performance is given.
I. INTRODUCCIÓN
En este trabajo se presentan, en el contexto de la
navegación por satélites del Sistema de PosicionamientoGlobal (GPS), dos prototipos preliminares desarrollados comoaplicación de un sistema de correcciones ionosféricas por losautores (véase Roldan, P. et al. 2003 y Roldan, P. et al.
2004) que permiten a un usuario enviar datos RINEX (unformato estándar para intercambio de observables GPS)mediante el protocolo de red TCP/IP y recibir un RINEXcorrespondiente con los observables de código y fase libresdel retardo ionosférico. El primer prototipo corrige RINEXobtenidos en tiemp o real que se envían al sistema porTCP/IP. El segundo prototipo corrige RINEX generados enun momento anterior por el usuario y que también se envían
al sistema por TCP/IP. Para ambos prototipos se describebrevemente su funcionamiento y se presentan los resultadosobtenidos de su aplicación al posicionamiento de un rover con RINEX corregidos con ambos prototipos y sucomparación con otras técnicas de corrección de los erroresionosféricos, tales como el posicionamiento con lacombinación GPS libre de ionosfera (PC) y usando el modelode Klobuchar.
II. DESCRIPCIÓN DE LA TÉCNICA
A. Descripción de la técnica de modelado ionosférico
La distribución de electrones libres en la ionosfera seaproxima por una rejilla de celdas tridimensionales en la que ladensidad electrónica se presume constante en un instantedeterminado en un sistema pseudo-inercial (ligado al sol)centrado en la Tierra (figura 1). Esta aproximación esparticularmente buena para detectar comportamientos locales
de la distribución de la densidad electrónica debido a surelativa estacionaridad respecto del principal agente ionizante,el Sol. El uso de dos capas de celdas en el modelo -en lugar deuna sola capa como se aplica normalmente- reducesignificativamente el error en la estimación del contenidoelectrónico.
Fig. 1 Corte meridional de las celdas con densidad electrónicaconstante en las que la distribución de la densidad electrónicase divide en el modelo alimentado por datos en tiempo realde estaciones GNSS.
La determinación de la ionosfera se realiza resolviendo en tiemporeal la ecuación (1), mediante un filtro de Kalman escalar. Los datos
de la fase de la portadora (LI = L1 – L2, en unidades de longitud) sonlos principales observables utilizados ya que el código presentaniveles de ruido mucho mayores que la fase y problemas demultipath. Los bias B I de la fase (constantes en cada arco continuode datos de fase con el mismo par satélite–receptor) se estimansimultáneamente como variables aleatorias (reiniciadas con cadacycle-slip). En el filtro, ambas incógnitas (BI y la densidadelectrónica Ne) se decorrelan en tiempo real a medida que lageometría del satélite cambia y su varianza resulta cada vez menor,teniendo en cuenta la relación para cada rayo:
I i j k
k jie I
Satellite
ceiver e I I Bl N Bdl N BSTEC L +≈+=+= ∑ ∑ ∑∫ δααα ,,
Re)( (1)
Siendo a ˜1.05 (metros de LI)/(1017 electrones · m-2)

5/10/2018 Prototipo corrector del error ionosf rico de - slidepdf.com
http://slidepdf.com/reader/full/prototipo-corrector-del-error-ionosferico-de 2
III. PROTOTIPO CORRECTOR DEL EFECTO IONOSFÉRICOEN TIEMPO REAL
A. Descripción del sistema
El prototipo corrector del error ionosférico en tiempo realconsta, principalmente, de tres grandes bloques:
1) RTDS (Real-time data server)
Este servidor TCP/IP proporciona el modelo ionosférico(STEC) calculado por el sistema generador de correccionesionosféricas en tiempo real al tercer bloque (servidor deRINEX corregidos de ionosfera en tiempo real), necesario parapoder extraer el efecto ionosférico de los observables GPS (taly como se ha mostrado anteriormente).
2) servnav3
Este servidor TCP/IP proporciona las efemérides en tiemporeal (véase Roldan, P. et al. 2004) al tercer bloque, necesariaspara calcular la posición del usuario donde se desea interpolarel STEC de las estaciones de referencia proporcionado en elmodelo ionosférico.
3) Servidor de RINEX corregidos de ionosfera en tiempo real
Este tercer bloque es el principal y consiste en un servidorque procesa los RINEX que le envían los usuarios del sistemaen tiempo real y les devuelve el RINEX con el errorionosférico corregido.
Para ello, es necesario conocer el STEC para cada rayosatélite-receptor en el RINEX proporcionado por el usuario.Esto se logra mediante una interpolación del STEC de lasestaciones de referencia disponible para el mismo satélite enla época más cercana (siempre con una ventana temporalmáxima de ±60 segundos). Éste STEC en tiempo real de lasestaciones de referencia es el que proporciona el módulo delprimer bloque (rtds). La interpolación geométrica en laposición del usuario calculada mediante el método deBancroft (véase Bancroft, S. 1995), hace que sea necesariodefinir un área de cobertura, donde el STEC interpolado esfactible, fuera de la cual la extrapolación del STEC puede
llevarnos a resultados erróneos. Una vez conocemos el STECpara cada rayo satélite-receptor del cliente, procedemos aaplicar las ecuaciones mostradas anteriormente y devolvemosal cliente un RINEX con los observables corregidos delretraso que introduce la ionosfera.
B. Aplicación del sistema
A continuación se muestran algunos ejemplos de la precisiónen el posicionamiento de un rover (la estación permanente"gage" en Barcelona, a 40º de latitud y 2º de longitud, aprox.)usando el RINEX original comparada con la obtenida usando
el RINEX con el error ionosférico corregido en tiempo real.
1) Error vertical vs tiempo
Fig. 1. Error Vertical vs tiempo. Barcelona, día 264 de 2004.
Usando tanto el RINEX sin corregir como el RINEX corregido,el error en el posicionamiento vertical oscila aproximadamenteentre 20 y -20 metros. Ambos errores de posicionamiento,difieren básicamente en un valor constante (de 4 a 8 metros),debido a la sustracción de la ionosfera (que en condicionesnormales varía lentamente, y por tanto puede considerarse
prácticamente constante en un periodo de una hora).
Este error se encuentra modulado por la componenteionosférica a largo plazo, cuyas variaciones se encuentranprincipalmente afectadas por el principal agente ionizante dela atmósfera: el Sol. Como es de esperar, el error es mayor enlas horas centrales del día (cuando el TEC alcanza su mayorvalor) que a horas más tempranas o tardías, presentandomínimos durante la noche. Podemos observar algunos errorespuntuales muy elevados cuando posicionamos el rover con elRINEX corregido debidos a la pérdida de algunos satélites,presentes en el RINEX original, produciendo un mayor DOP
que se traduce en un mayor error en el posicionamiento. Lapérdida de satélites se debe a las restricciones impuestas alsistema de correcciones de RINEX, que no devuelve losobservables corregidos de un satélite concreto si no disponede una medida de STEC de alta precisión de un mínimodeterminado de estaciones de referencia para el satéliteespecífico. Si esto ocurre, el sistema no es capaz de corregirlos observables del rover para ese satélite en concreto y,consecuentemente, éste se elimina del RINEX devuelto alusuario, disminuyendo el número de satélites disponiblespara determinar la posición del rover en la época dada.
2) Error horizontal vs tiempo
Fig. 2. Error Horizonta l vs tiempo
En el error de posición horizontal, el efecto del errorionosférico no es tan importante como en la componente

5/10/2018 Prototipo corrector del error ionosf rico de - slidepdf.com
http://slidepdf.com/reader/full/prototipo-corrector-del-error-ionosferico-de 3
vertical (de 1 a 3 metros de diferencia) debido a sudependencia de la geometría particular de los satélites.
De los ejemplos mostrados, podemos obtener las siguientesestadísticas:
Tabla 1. Estadísticas de Raw RINEX y RT Corrected RINEX
Como se ha podido ver en las figuras anteriores, elbias delerror vertical de posicionamiento se reduce de manerasignificativa de 6 a 2 metros, mientras el bias del error verticales prácticamente el mismo. La desviación estándar de amboserrores no está afectada por la corrección del error ionosférico
debido a que las variaciones del TEC ionosférico son de muybaja frecuencia.
IV. PROTOTIPO CORRECTOR DEL EFECTO IONOSFÉRICOEN POST PROCESO
A. Descripción del sistema
El funcionamiento del segundo prototipo corrector en post-proceso guarda muchas similitudes con el de tiempo real anivel de estructura y diseño. Esto es debido a que funcionacomo un emulador de tiempo real y usa un proceso auxiliar
para sincronizar el tiempo de las efemérides con la época delos datos del RINEX del usuario. La principal diferencia resideen el cálculo del modelo ionosférico, que ahora, lejos derecibirse de una fuente externa, es calculado por el propiosistema con anterioridad a la corrección del RINEX delusuario a partir de los datos históricos de la red de estacionesde referencia del ICC (CATNET). Asimismo, el modeloionosférico es más preciso en post-proceso al usar el último, ypor tanto mejor estimado, “bias” de cada arco, ecuación (1),(véase Hernandez-Pajares, et.al. 2002)
B. Aplicación del sistema
A continuación se muestran algunos ejemplos de la precisiónen el posicionamiento de un "rover" (la estación permanente"gage" en Barcelona) con la pseudodistancia usando elRINEX original comparada con la obtenida usando el RINEXcon el error ionosférico corregido en post-proceso.
Fig. 3. Error vertical vs tiempo Fig. 4. Error horizontal vstiempo
Las figuras anteriores nos llevan a las mismas conclusiones anivel cualitativo que se han dado para el sistema en tiemporeal. Lo único destacable es que en post-proceso desaparecenlos “outliers” debido a que el cálculo del modelo ionosféricose realiza con datos de las estaciones de referencia máscompletos (sin pérdida de épocas), por lo que el RINEXcorregido tiene los mismo satélites que el original en cada
época.
De los ejemplos mostrados, podemos obtener las siguientesestadísticas:
Tabla 2. Estadísticas de Raw RINEX y PP Corrected RINEX
Usando el sistema de corrección del efecto ionosférico enpost-proceso, el bias del error vertical se reducesignificativamente de 6 metros a 65 centímetros (en tiemporeal se reducía de 6 a 2 metros). Por otra parte, por las mismasrazones que para el tiempo real, El “bias” del error horizontal ylas sigmas de ambos errores no quedan afectadasprácticamente por las correcciones ionosféricas.
3) Posicionamiento con código C1 y con la combinación PC
A continuación se compara el posicionamiento usandoúnicamente el código C1 (como hasta el momento) con elposicionamiento usando la combinación libre de ionosfera(PC), que elimina un 99,99% del error ionosférico pero añademucho ruido a la medida debido al uso del código C2.
La figura y estadísticas siguientes muestran el error total (enmetros) de la posición del rover usando la combinación PC, elcódigo C1 sin corregir y el código C1 corregido de ionosferaen post-proceso. La mejora de un posicionamiento sinionosfera se ve enmascarada por el incremento del ruido
cuando usamos la combinación PC. Por tanto, el uso delcódigo C/A continúa dando mejores resultados.
Fig. 5. PC, NOT Iono-corrected and Iono-corrected Error vstime
5/10/2018 Prototipo corrector del error ionosf rico de - slidepdf.com
http://slidepdf.com/reader/full/prototipo-corrector-del-error-ionosferico-de 4
Tabla 3. Estadísticas de posicionamiento con PC Combination,Raw y PP Corrected RINEX
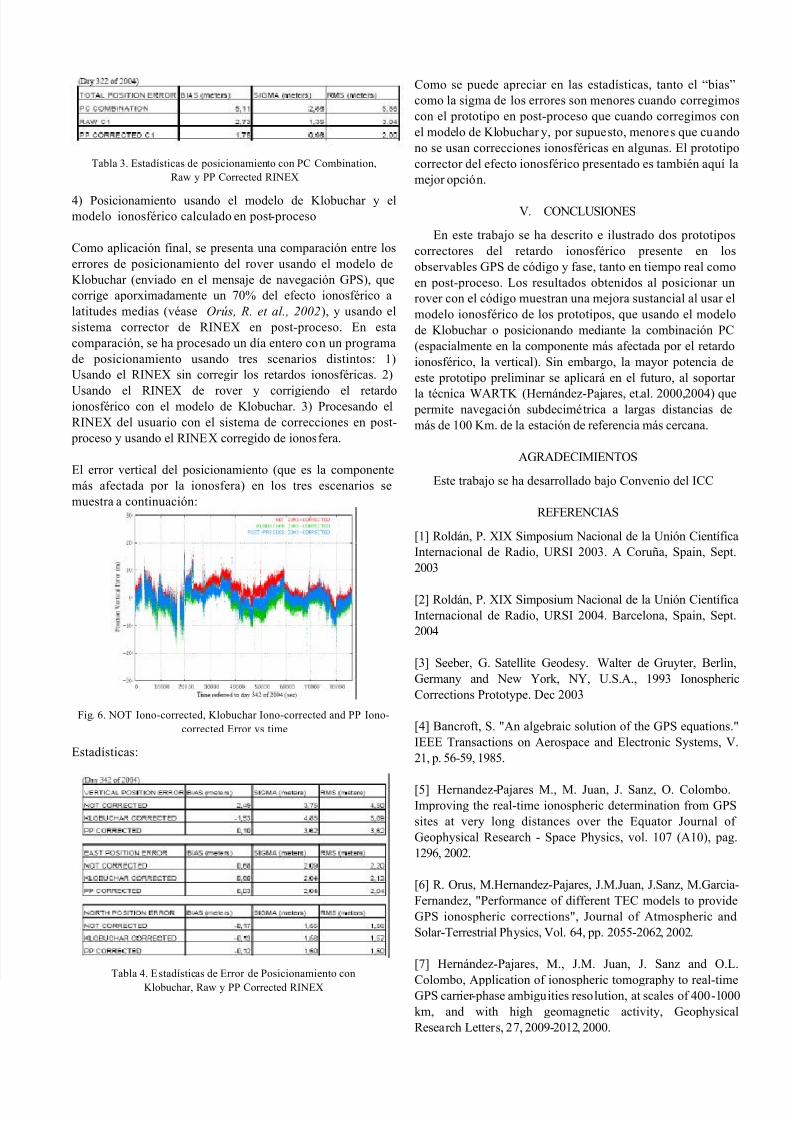
4) Posicionamiento usando el modelo de Klobuchar y elmodelo ionosférico calculado en post-proceso
Como aplicación final, se presenta una comparación entre loserrores de posicionamiento del rover usando el modelo deKlobuchar (enviado en el mensaje de navegación GPS), quecorrige aporximadamente un 70% del efecto ionosférico alatitudes medias (véase Orús, R. et al., 2002), y usando elsistema corrector de RINEX en post-proceso. En estacomparación, se ha procesado un día entero con un programade posicionamiento usando tres scenarios distintos: 1)Usando el RINEX sin corregir los retardos ionosféricas. 2)
Usando el RINEX de rover y corrigiendo el retardoionosférico con el modelo de Klobuchar. 3) Procesando elRINEX del usuario con el sistema de correcciones en post-proceso y usando el RINEX corregido de ionosfera.
El error vertical del posicionamiento (que es la componentemás afectada por la ionosfera) en los tres escenarios semuestra a continuación:
Fig. 6. NOT Iono-corrected, Klobuchar Iono-corrected and PP Iono-corrected Error vs time
Estadísticas:
Tabla 4. Estadísticas de Error de Posicionamiento conKlobuchar, Raw y PP Corrected RINEX
Como se puede apreciar en las estadísticas, tanto el “bias”como la sigma de los errores son menores cuando corregimoscon el prototipo en post-proceso que cuando corregimos conel modelo de Klobuchar y, por supuesto, menores que cuandono se usan correcciones ionosféricas en algunas. El prototipocorrector del efecto ionosférico presentado es también aquí lamejor opción.
V. CONCLUSIONES
En este trabajo se ha descrito e ilustrado dos prototiposcorrectores del retardo ionosférico presente en losobservables GPS de código y fase, tanto en tiempo real comoen post-proceso. Los resultados obtenidos al posicionar unrover con el código muestran una mejora sustancial al usar elmodelo ionosférico de los prototipos, que usando el modelode Klobuchar o posicionando mediante la combinación PC(espacialmente en la componente más afectada por el retardoionosférico, la vertical). Sin embargo, la mayor potencia deeste prototipo preliminar se aplicará en el futuro, al soportar
la técnica WARTK (Hernández-Pajares, et.al. 2000,2004) quepermite navegación subdecimétrica a largas distancias demás de 100 Km. de la estación de referencia más cercana.
AGRADECIMIENTOS
Este trabajo se ha desarrollado bajo Convenio del ICC
REFERENCIAS
[1] Roldán, P. XIX Simposium Nacional de la Unión CientíficaInternacional de Radio, URSI 2003. A Coruña, Spain, Sept.2003
[2] Roldán, P. XIX Simposium Nacional de la Unión CientíficaInternacional de Radio, URSI 2004. Barcelona, Spain, Sept.2004
[3] Seeber, G. Satellite Geodesy. Walter de Gruyter, Berlin,Germany and New York, NY, U.S.A., 1993 IonosphericCorrections Prototype. Dec 2003
[4] Bancroft, S. "An algebraic solution of the GPS equations."IEEE Transactions on Aerospace and Electronic Systems, V.21, p. 56-59, 1985.
[5] Hernandez-Pajares M., M. Juan, J. Sanz, O. Colombo.Improving the real-time ionospheric determination from GPSsites at very long distances over the Equator Journal of Geophysical Research - Space Physics, vol. 107 (A10), pag.1296, 2002.
[6] R. Orus, M.Hernandez-Pajares, J.M.Juan, J.Sanz, M.Garcia-Fernandez, "Performance of different TEC models to provideGPS ionospheric corrections", Journal of Atmospheric andSolar-Terrestrial Physics, Vol. 64, pp. 2055-2062, 2002.
[7] Hernández-Pajares, M., J.M. Juan, J. Sanz and O.L.
Colombo, Application of ionospheric tomography to real-timeGPS carrier-phase ambiguities resolution, at scales of 400-1000km, and with high geomagnetic activity, GeophysicalResearch Letters, 27, 2009-2012, 2000.