programa - geocities.ws filefundamentos de la mecánica newtoniana. sistemas inerciales y principio...
TRANSCRIPT

PROGRAMA: 1. Fundamentos de la mecánica newtoniana. Sistemas inerciales y principio de relatividad de Galileo. Leyes de Newton. Ecuaciones de la dinámica newtoniana en sistemas no inerciales. Movimiento de una partícula sobre la superficie terrestre. El péndulo de Foucault. 2. Mecánica lagrangiana: Ligaduras, coordenadas generalizadas y espacio de configuración. Principio de D'Alembert. Ecuaciones de Lagrange para sistemas con ligaduras holónomas y cinemáticas lineales. Formulación lagrangiana del movimiento relativo a sistemas no inerciales. 3. Leyes de conservación en mecánica lagrangiana. Cálculo variacional. Principio de Hamilton. Integración de las ecuaciones del momiento. Constantes del movimiento.Teorema de Noether. 4. Introducción a la mecánica hamiltoniana: Espacio de fases. Ecuaciones canónicas de Hamilton. Paréntesis de Poisson. 5. El problema de los dos cuerpos. Reducción al problema equivalente de un solo cuerpo. Campo de fuerzas central. El problema de Kepler. Dispersión en un campo de fuerzas central. Fórmula de Rutherford. 6. Fundamentos de la teoría de la relatividad especial: Incompatibilidad de la mecánica newtoniana y el electromagnetismo. Hechos experimentales. Postulados de Einstein. El espacio-tiempo en la relatividad especial. 7. Cinemática relativista: Transformaciones de Lorentz. Ley de composición de velocidades. Formulación cuadridimensional. 8. Dinámica relativista: La energía y el momento relativistas. Conservación del cuadrimomento. La equivalencia entre masa y energía. Colisiones relativistas. Sistemas de laboratorio y de centro de masas. Formulación lagrangiana de la mecánica relativista.

Apuntes de: Pablo M. García Corzo
A partir de las clases de E. Maciá Barber

Teorema de Coriolis:
punto material
SDRNI
SDRI
Posición del P.M. respecto al SDRI. Posición del P.M. respecto al SDRNI. Posición del SDRNI respecto al SDRI.
AwdtAd
dtAd
SDRNISDRI
rrrr
×+
=
[ ]∑ ×+××+×+−=⋅ rwrwwvwRmFam NINIr&rrrrrr&&rrr )(2
&&r Donde:
CoriolisvwCentrífugaComprww
Azimutalrw
ArrastreR
NI →×→××
→×
→
rr
rrr
r&r
2.)(

SISTEMAS DISIPATIVOS
Los consideraremos sólo si actúan en la dirección del sistema (y en oposición de sentidos). F(v) => sólo depende de la velocidad del sistema.
2210)( vavaavF ++=
a0 , Rozamiento Coulombiano
Dinámico: g
vxxgtvvmg
dtdv
µµµ
2
20
00 +=⇒−=−⇒−=m
a1 , Disipación de Stokes
Tiempocteevvdtma
vdvvavR
dtdvm
t
.6 10
11
−−
=⇒−=⇒=−= τπη τ a
ττ τ0000 1 vxxevxx t
t
+= →
−+= ∞∞→
−
¡v sólo llega a 0 en un tiempo infinito! Sin embargo no recorre un espacio infinito.
a2 , Newton
-Froude:
++=⇒
+
=⇒−= tm
vmxxt
mv
vvv
dtdvm
ββ
ββ
00
0
02 1log1

Péndulo de Foucault:
Básicamente, se trata de demostrar que la tierra gira, y que no es, por tanto, un sistema de referencia inercial. Para ello, se monta un péndulo de grandes dimensiones que describirá, además de las oscilaciones normales de todo péndulo, un movimiento lento de giro como se muestra en el dibujo.
λ
λλλ
cos2
2)cos(2
0
0
0
xmwmgFzm
senxmwFymsenyzmwFxm
z
y
x
&&&
&&&
&&&&
+−=
−=−−=
ctezzlmlTF
yml
TF
xml
TF
z
y
x
≈→−=
−=
−=
)(
λcos2 00 xwgmT
&−=
λλ
λλ
cos2
2
cos2
2
00
00
xylw
senxwylgy
xxlw
senywxlgx
&&&&
&&&&
++−=
++−=
xyyyxx&&&
&&&
α
α
22
2
2
−Ω−=
+Ω−=
λα senwlg
0=
=Ω
)(2)(2 yxiiyixyxi &&&&&& +++Ω−=+ α

PROYECTIL DE TARTAGLIA:
Rozamientos Velocidades Peso Trayectoria real Trayectoria parabólica
20
1
0
00
2210
tan
)cos(
coslog
1log
)(
y
x
vm
A
A
tmgA
myy
tm
vmxx
vavaavF
β
β
β
ββ
−=
−
+=
++=
++=

Ligaduras
Definición
Condicionantes del movimiento de un Stma mecánico
Ligaduras: ESTRUCTURALES:
Cuerda del péndulo (l=cte) Superficie sobre la que nos movemos Eje de rotación
MODO DE ACTIVACIÓN
Fuerzas de ligadura Las responsables de las ecuaciones de ligadura.
Ecuaciones de ligadura
Describen el resultado de la acción de las fuerzas de ligadura.
Clasificación de las ecuaciones de ligadura:
Bilaterales ∑ = 0F
0.
0)(0),(
0),,(
=∂∂
+⋅∆→
=→=→=→
tfrfsIntegrableCinem
rfiasEstacionartrfsGeométrica
trrfsCinemática
&rr
r
r&rr
Unilaterales ∑ ≥ 0F
Fase activa: F=0 Fase inactiva: F>0

CLASIFICACIÓN DE SISTEMAS
Holónomo: Todas las ligaduras son:
-geométricas -cinemáticas integrables -estacionarias
Holónomo…
-Esclerónomo: Ligaduras cinemáticas integrables o ligaduras estacionarias. -Reónomo: Ligaduras geométricas.
No Holónomo: Al menos una ligadura es cinemática no integrable.
Grados de libertad:
Nº de variables independientes en un sistema.
nº de partículas
Sistema de partículas:
grados de libertad
n ecs. de ligadura
º deKNg −= 3
Sistema con sólidos rígidos:
KNM −+= 36
nº de ecs. de ligadura
nº de partículas
nº de sólidos rígidos
ggrados de libertad

PRINCIPIO DE D’ALAMBERT (1743)
Desplazamientos y velocidades posibles:
Efectos de las ligaduras ∑ =+⋅
ikiki ara 00,,
&→rr (donde k son ligaduras e i coordenadas)
Desplazamiento virtual ( rrδ )
∑∑
=+⋅
=+⋅
0'
0
0,,
0,,
dtarda
dtarda
kiki
kikirr
rr
0)'( ,, =⋅=− ∑∑ rardrda kiiikirrrrr δ
Ppio de los trabajos virtuales
Ligadura ideal:
El trabajo realizado por las fuerzas de ligadura asociadas al desplazamiento es nulo para todo desplazamiento virtual.
0=⋅℘ ii rrv
δ La condición necesaria y suficiente para un stma. esté en equilibrio es que la suma de los trabajos realizados por la resultante de las fuerzas se anule para todo trabajo virtual.
ii rrFEquilibrioStma ra
rrrδδ∑ ∀=⋅℘+⇔ 0)(.
Ppio de D’Alambert(1743)
∑ =⋅℘+Ρ−
=℘+
0)( iiii
ii
rF
Frr&rr
r
δ
ρ
∑ ⋅Ρ− iii rF rrrδ)´(

ECUACIONES DE LAGRANGE:
(antes de Lagrange) vectores de posición. ir
Ni ,,1L= partículas en el sistema.
Vía ecuaciones de ligadura → Grados de libertad K
KNMgnj
pSR −+==
36,,1L
Coordenadas generalizadas jq Ecuaciones de transformación →
),,,( 1 tqqrr nii Lrr
=
( )∑ ∑ ∑∑
∑∑
=
∂
−∂
=∂∂
−
∂=⇒
∂∂
+∂∂
=
i jj
j
i
j
iij
jii
jj j
ii
jj
j
ii
qqrrm
qrFq
qrPF
qqrr
trq
qrr
0δδ
δδ
r&&r
r&rr
rr
rr&r
Fuerza generalizada:
∑= ∂
∂≡
n
i j
iij q
rFQ1
rr
UTL
QqT
qT
dtd
jjj
−=
=∂∂
−
∂∂&
Ecuaciones de Lagrange
0=∂∂
−
∂∂
jj qL
qL
dtd
&
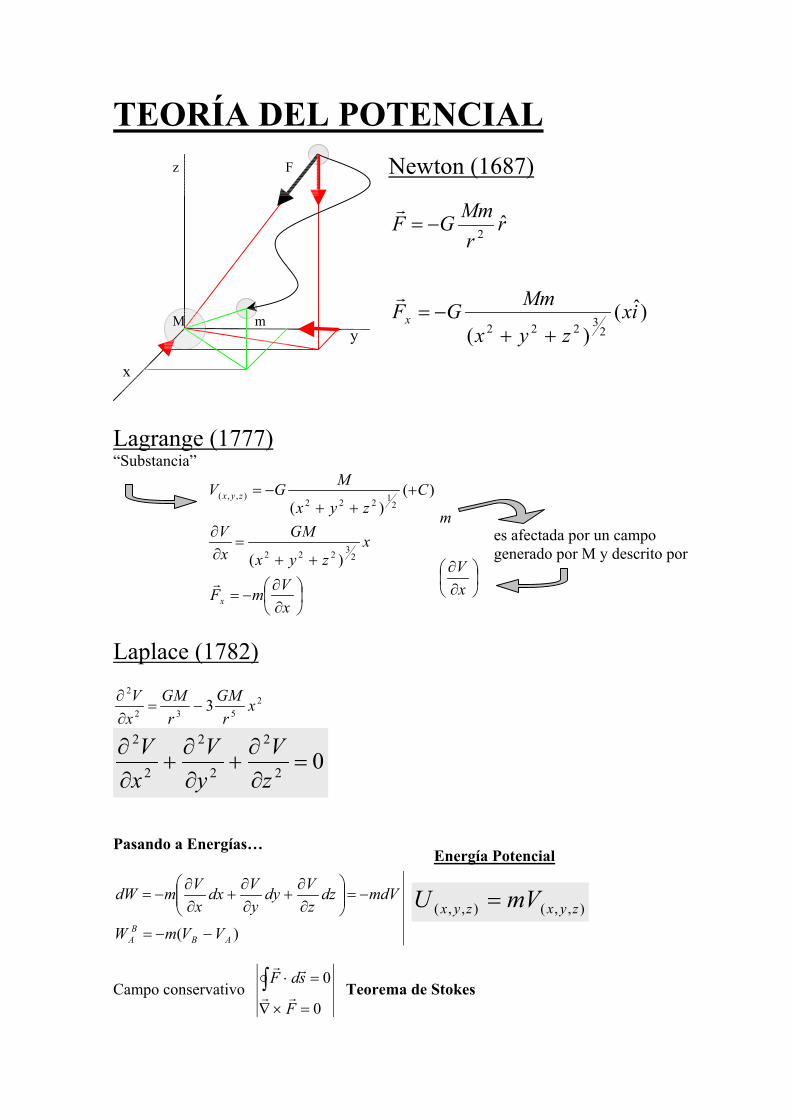
TEORÍA DEL POTENCIAL
x
y m M
z F Newton (1687)
)ˆ()(
ˆ
23222
2
ixzyx
MmGF
rr
MmGF
x++
−=
−=
r
r
Lagrange (1777) “Substancia”
∂∂
−=
++=
∂∂
+++
−=
xVmF
xzyx
GMxV
Czyx
MGV
x
zyx
r
23222
21222
),,(
)(
)()(
∂∂
xV
m es afectada por un campo
generado por M y descrito por
Laplace (1782)
2532
2
3 xr
GMr
GMxV
−=∂∂
02
2
2
2
2
2
=∂∂
+∂∂
+∂∂
zV
yV
xV
Pasando a Energías…
)( ABB
A VVmW
mdVdzzVdy
yVdx
xVmdW
−−=
−=
∂∂
+∂∂
+∂∂
−= ),,(),,( zyxzyx mVU =
Energía Potencial
Campo conservativo 0
0
=×∇
=⋅∫F
sdFrr
rr
Teorema de Stokes

Potenciales en 1-D
(interpretación de gráficas de energías o esquemas energéticos)
V
E total
E potencial
E cinética x
Ejemplo de aplicación: Problema 14:
Si partimos de una energía mayor que uno, la energía potencial descenderá hacia la izquierda, por tanto, el sistema se acelerará en dicha dirección con una aceleración que irá disminuyendo hasta una velocidad constante. Si partimos de una energía menor que uno, la energía potencial disminuirá bruscamente hacia el punto asintótico en x=4, lanzándose a velocidades desmesuradas

MECÁNICA LAGRANGIANA 1.- Grados de libertad.
N = nº partículas K = nº ecuaciones de ligadura
KNng −⋅=≡ 3 2.- Elección de coordenadas generalizadas.
)(tqq jj ≡
3.- Explicitar las ecuaciones de transformación.
),( tqrr jii =
4.- Transformación de las coordenadas energéticas.
),,()(21 22
1
2 tqqTzyxmT jjii
N
iii &&&& ⇒++= ∑
=
),(),,( tqUzyxU j⇒
5.- Expresión del Lagrangiano y ecuaciones de Lagrange.
=∂∂
−
∂∂
−=
jj qL
qL
dtd
UTtqqL
&
& ),,(
0 (conservativo) Qj (no conservativo)

Ejemplo 1 :
Aro con bola deslizante: (estudio Newtoniano)
La bola estaría perforada e incrustada en el aro que gira de modo que pudiera desplazarse por su perímetro. wr
θe
prϕe
re
θe es tangente al aro.
re sigue la dirección radial.
ϕe va en la dirección tangente al
giro descrito por wr
.
ϕϕθ θθ eFeFseneemgF rrr ˆˆ)ˆcosˆ( ++−=∑r
Peso ligaduras coriolis
Centrifuga (i)Peso Centrífuga (ii)Ligaduras:
θθθ 2222
cos senmRwR
RmmgFr −−−=&r
θθ
θθθθ
ϕ cos2
cos2
&
&&
mwRF
senwsenRg
−=
+−=

Aro con bola deslizante: (estudio Lagrangiano) Ligaduras: Coordenadas generalizadas:
wtRr
==
ϕ
2132 −⋅=≡⇒= ngK
Ecs. de transformación: ===
zyx
Coordenadas energéticas:
(21
)cos1(21)(
21
22
222
+=−=
−==
=++=
θ
θ
wmRUTL
mgRmgzU
zyxmT
&
&&&
Ecuación de Lagrange:
θθθ
θθ
mgRsenwmRL
mRL
−=∂∂
=∂∂
cos22
2 &&
θ
θϕ
m
R
)cos1(
cos
θθθ
−RsenwtRsen
wtRsen
θθ
θθθ2222
22222222 cossenRz
senwRRyx&&
&&&
=
+=+
)1(cos)
)(
22
22222
−+
+
θθ
θθ
mgRsen
senwRRm &
θsen
0cos2 =−+ θθθθ senwsenRg&&

Ejemplo 2:
Péndulo con hilo extensibe (Hooke): Donde d es la longitud natural del hilo,
η es la elongación, k la constante de elasticidad del hilo, m es la masa que pende, θ es el ángulo respecto a la vertical. Ligaduras:
θ
m
η
d k
1130
21 2
−⋅=≡=
=→−=
ngz
kUkF e ηη),( ηθ
Ecuaciones de transformación:
ηθηθη
θηθηθη
dydydsenxsendx
&&
&&&
(coscos)(c)()(
++−=⇒+−=
++=⇒+=
Coordenadas energéticas:
[ ]
[ ]222
22
222222
21cos)()(
21
21cos)(
21
)(21)(
21
ηθηθηη
ηθηη
θηη
kdmgdmUTL
kdmgkmghUUU
dmzyxmT
eg
++−++=−=
++−=+=+=
++=++=
&&
&&&&&
Ecuaciones de Lagrange:
ηθθηη
ηη
θηθ
θηθ
kmgdmL
mL
sendmgL
dmL
−++=∂∂
=∂∂
+−=∂∂
+=∂∂
cos)(
)(
)(
2
2
&&
&&
)(
2)(
2+−
++
θηη
θηθη
d
d
&&&
&&&
θθ
θ
sen&)os
2
0cos
0
=+−
=+
ηθ
θ
mkg
gsen&

MÁQUINA DE ATWOOD R
U=0
-h
h
M
m2
m1
Ecuaciones de ligadura:
21
21
21 ;
yyctezz
RxRx
−===
=−=
Modo de activación
Geométrica
hg ⇒=−⋅= 1523
Coordenadas generalizadas:
1
21
yh
yyh&& =
−==
Coordenadas energéticas:
( )
)(22
1)(
221
21
21
221
21212
212211
2122
22211
22
mmghmmMhUTL
mmghgymgymU
mmMhymymwMRTTT tr
−−
++=−=
−=+=
++=++=+=
&
&&&
Ecuaciones de Lagrange:
)(
2
21
21
mmghL
mmMhhL
−=∂∂
++=
∂∂ &&
0)(2 2121 =−+
++ mmgmmMh&&

POTENCIALES GENERALIZADOS
Para llegar a las ecuaciones de Lagrange:
0
),(1
=∂∂
−
∂∂
=∂∂
−=∂∂
=
=∂∂
−
∂∂
∑=
jj
N
ij
jj
ij
jjj
qL
qL
dtd
tqUUqU
qr
FQ
QqT
qT
dtd
&
ar
&
Ahora tenemos:
∑+=
=∂∂
−
∂∂
−=
∂∂
+∂∂
=
=
jjjj
jj
jjj
qgtqGtqqG
qL
qL
dtd
GTL
qG
dtd
qGQ
tqqGG
&&
&
&
),(),,(
0
),,(
0
Ver paralelismo de notación en sistemas naturales

SISTEMAS NATURALES: (Gantmájer pg 60 y 92) Aquellos Sistemas clásicos en los que el potencial de la fuerzas es el potencial ordinario o bien el generalizado, serán denominados sistemas naturales.
i) Pongámonos en el caso en que tengamos un potencial ordinario:
),( tqUU i= Energía cinética:
∑
∑
∑
∑∑∑ ∑ ∑
∂∂
=
∂∂
∂∂
=
∂∂
∂∂
=
++=
∂∂
+⋅∂∂
==
++=
==
2
0
,
011,
,
22
012
21
21
21
21
trma
tr
qrma
qr
qrma
aqaqqatrq
qrmrmT
TTTT
ii
kiki
n
iiiki
n
kikii
i
&&&&&
UTLTLTL
LLLUTL
−===
++=−=
00
11
22
012
ii) En el caso de un potencial generalizado:
VVVqVU
tqqUUn
iii
ii
+=+=
=
∑=
11
),,(
&
&
(Ver paralelismo de notaciónen potenciales generalizados)
VTLVTL
TLLLLUTL
−=−=
=++=−=
00
111
22
012

Función de disipación de Rayleigh:
10);,...,1(0 GGTGTLnjqL
qL
dtd
jj
−−=−===∂∂
−
∂∂
a&
Para fuerzas disipativas con forma de ley de Stokes:
iiii
v
n
iiziyix
zixi
Fkz
jy
ix
zkykxk
krjrirrrkF
r
&&&
&&&
rrr
=
∂∂℘
+∂∂℘
+∂∂℘
−=℘∇−
++≡℘
++=−=
∑=
ˆˆˆ
)(21
)ˆˆˆ();(
222
1
222
jjj
QqL
qL
dtd
=∂∂
−
∂∂&
∑∑
∑
∑ ∑
∂∂℘
−=∂∂
∂∂℘
−
∂∂
=∂∂
∂∂
+∂∂
==
∂℘∇−=
∂=
=
=
kj jk
k
ji
j
i
j
i
n
j
ij
j
iii
n
i j
iiv
j
iij
qqv
v
qr
qv
tr
qqr
vr
qr
qr
FQ
,
1
1,
&
r
&
r
r
&
rr&r
rrr
0=∂∂℘
+∂∂
−
∂∂
jjj qqL
qL
dtd
&&

Ecuación de la energía:
)),(),((; ttqtqLdtdL
&
tLq
qLq
qL
dtdL
j
n
j j
n
jj
j ∂∂
+∂∂
+∂∂
= ∑∑==
&&&
&11
∑=
∂∂
−
∂∂n
jj
jj
qqL
dtd
qL
dtd
1
&&&
tLq
qL
dtd
qLq
qLL
dtd
jjj
jj ∂
∂−
∂∂
+∂∂
−=
∂∂
+− ∑∑ &&
&&
Función de la energía:
),,( tqqhhLqqLh
jj
j
&&&
=→−∂∂
=∑
⇒∂∂
−∂∂℘
−= ∑ tL
qdtdh
& Cuando cteh
Lt=
⊄=℘ 0
Integral de Jacobi
Si la función es homogénea:
∑ =∂∂ nFxxF
ii
·
tL
dtdh
∂∂
−℘−= 2
Ecuación de la energía (caso general)
002 GTTh +−=

i) Si el sistema es conservativo:
tLh∂∂
−=⇒=℘ &0
ii) Si 00 =⇒=∂∂
⇒⊄ htLLt &
002 GTTcteh +−==a
iii) Si 00.. 0 =⇒=∂∂
⇒⊄ tt
FTransEcst i
r
02 GTcteh +==a
Conservación energía “estándar”:
mghmv +2
21
(Gantmájer pg72) En un sistema esclerónomo en el que la velocidad no dependa explícitamente del tiempo:
El doble de la función de Rayleigh es igual a la velocidad de decrecimiento de la energía. dt
dE21
−=℘

LEYES DE CONSERVACIÓN Y SIMETRÍAS
Noción de Simetría:
-Aplicamos una transformación (Heráclito) -Buscamos invariantes (Parménides)
4π
xxxxxfxfxx
xxxf
cos)cos()()()'('
cos)(
22
2
=−−=−=
−==
Simetría asociada a las ecuaciones de Lagrange:
Transformación:
444 3444 21&&
&
iantein
qL
qL
dtd
qL
qL
dtd
dtdqq
dtdq
tdtdqqLL
tt
var
1 00''
''
,'
,
0;'
=∂∂
−
∂
∂⇒=
∂∂
−
∂∂
==
→
−ℜ∈=
−λλ
λ
λλ
¡Atención!
Si tt −→⇒−= 1λ ¡¡¿¿Futuro = Pasado??!!

COORDENADAS CÍCLICAS E INTEGRALES PRIMERAS
Definición 1.- Momento conjugado:
jj q
LP&∂∂
≡
Tma: Si una coordenada es cíclica, su momento se conserva.
=⇒=
=∂∂
→
∂∂
−
∂∂
=
ctePdt
dPqL
qL
qL
dtd
jj
j
jj 0
0)2(0
a&
Definición 2.- Coordenada cíclica:Lqcíclicaq jj ⊄⇒
Definición 3.- Una función Φ es ),,( tqq & ∫ ª1 si mantiene su valor constante al sustituir sus variables por valores particulares. Definición 4.- Un Stma es integrable si todas sus qj pueden ser expresadas en términos de funciones elementales o de integrales primeras.
Integral de acción. Espacio de configuraciones.
q2
q1
Construimos un espacio con las coordenadas generalizadas. ¿Qué trayectoria sigue un sistema en el ede configuraciones?
spacio
Integral de acción:
∫= dttqqLS ),,( &
PRINCIPIO DE HAMILTON: De todas las trayectorias posibles entre dos puntos en el espacio de configuraciones, nuestro sistema seguirá aquel que haga extrema (Max, min o P.I.) su integral de acción.

SIMETRÍA CANTIDAD CONSERVADA
HOMOGENEIDAD Espacio Momento lineal (no puntos distintos) Tiempo Energía
ISOTROPÍA (no direcciones preferentes)
Espacio Momento angular
BÚSQUEDA DE SIMETRÍAS
[ ]∫=B
A
T
T
dtttqtqLS ),(),( &
Teorema de Noether: Si la integral de acción de un sistema permanece invariante ante una transformación paramétrica:
∑
∑∑
=
==
−Φ=
∂∂
−Φ
−
∂∂
=
Φ+=
+=
+=
n
jjj
conservadacantidad
n
jj
j
n
jj
jj
jjjj
jjjj
PhJ
qLLq
qLJ
tqtt
tqtqtq
tqtqtq
1
)(
11),('
),()()('
),()()('
ψ
ψ
ε
ψε
εψ
444444 3444444 21&
&&
&&&
i. Si qi es cíclica ( Lqi ⊄→ )
LLtetrivialmen
ttqq
nn
ii =⇒
==
+=
=
')(
''
'
' 11
M
M
ε.
0
)var('''
ctePPhJ
ianteinSLdtdtLS
jjjijj =−=−Φ=
=Φ
=
===
∑
∫ ∫ψ
δψ

ii. Si (trivial) LLLt =⇒⊄ '
∑ ==−Φ=
=Φ
=
=
=⇒
+==
=
.10
)var('
')(
''
' 11
ctehPhJ
ianteinSS
LLtetrivialmen
ttqq
jjj
nn
ψψ
ε
M
PRINCIPIO DE HAMILTON
PRINCIPIO DE HAMILTON: De todas las trayectorias posibles entre dos puntos en el espacio de configuraciones, nuestro sistema seguirá aquel que haga extrema (Max, min o P.I.) su integral de acción.
∫∑
∫∑
∫∑
∫
=
=
∂∂
∂
∂∂
+∂∂
=
=
∂
∂
∂∂
+∂
∂
∂∂
=
∂∂
==
⋅
∂∂
=
+=
+=
=≡
αη
αη
αααα
ηη
αα
δαηα
αηα
δ
ddtLagrangeEcs
dtt
qqL
qL
dtq
qLq
qLSd
tt
dSSttqtq
ttqtq
dttqqLSS
j
j
jj
j
j
j
j
j
BjAj
nnn
.
0)()()()0,(),(
)()0,(),(
),,(,0
2
111
&
&
&
M
&

MULTIPLICADORES DE LAGRANGE (Modo de obtener fuerzas de ligadura con Lagrange) Ppio de Hamilton
[ ] ∑∫
∫≡∂=∂→+=
=∂⇒=
⇓
jjdtqLgEcsSttqtq
SLdtS
0..)()0,(),(
0min
αηα
Sistema HOLÓNOMOLigadura integrable.
Sistema NO HOLÓNOMO Ligadura no integrable.
∑ =∂∂
+∇j
j tfqf 0&
r ∑ =+
jljlj dtadqa 00
∑ =∂j
jlj qa 0


TEMA 6
INTRODUCCIÓN A LA TEORÍA DE LA RELATIVIDAD
ESPECIAL (o restringida).

1.- Precedentes de la teoría. (1895-1905)
1895.- J.J. Thomson descubre el electrón: -Partícula. -Masa. -Carga. rr
( )( )BvEm
qa
BvEqFrrr
321
r
rr
××
=
××=
)1(
m
F
(1)
a -Kauffmann: mm )(v= -Transición de fuerzas a energías:
mrdEe
vvWm
mvvdvmWdtvdtvdmrdamrdFdw
Lorentz
A
OAA
AO
A
OAAO
≡⋅⋅==
⇒==⇒===
∫
∫
−
−
4434421
rra
rr
rrrr
)2(
22
2
2
21
Masa electromagnética = Masa inercial -Concepciones del electrón: 1902.- Abraham:
Esfera sólida con carga en su superficie. Concepción clásica de radio electrónico.
1904.- Bucherer: Volumen constante. “Deformable” 1904.- Lorente:
- -
- - -
- -
-
-
Volumen≠ cte.
4434421)(
2
20
1
luzca
av
mm
≡
−
=
2m0
m
m0
v/a

2.- Motivaciones conceptuales. -ARISTÓTELES: “El cuerpo en movimiento se detiene cuando la fuerza que lo empuja deja de actuar.” -GALILEO: “Toda velocidad, una vez impartida a un cuerpo, se conservará sin alteración mientras no existan causas externas de aceleración o frenado […] de esto se infiere que el movimiento sobre un plano horizontal es perpetuo.” -NEWTON: “Un cuerpo en reposo, o en movimiento, se mantendrá en reposo o en movimiento rectilíneo uniforme, a menos que sobre él actúen fuerzas exteriores que lo obliguen a modificar dichos estados.” (Ley de inercia.) -Sistema de coordenadas inercial o de Galileo: Un sistema de coordenadas cuyo estado de movimiento sea tal que con relación a él se cumple la ley de inercia lo llamaremos sistema de coordenadas de Galileo. -Teorema de adición de velocidades (Galileo-Newton):
tttvrr
=−=′
'
rrr
Invariantes frente a
rmrrqqKfCOULOMB
rmrr
mmGfNEWTON
&&rrr
&&rrr
=−=→
=−=→
3
3
'
'
De donde se deduce que para todos los sistemas de coordenadas de Galileo, tanto las leyes de gravitación como las leyes de la electrostática son invariantes. -Ecuaciones de Maxwell:
-Sí invariantes ante transformaciones de Lorentz:
012
2
22 =
∂∂
−∇tE
cE j
=∇
=∇
=∂∂
−×∇
=∂∂
+×∇
0·
·
0
0
000
B
E
JtEB
tBE
ερ
µεµ¡¡¡NO INVARIANTES!!! ante Galileo.
−
−=
−
±=
2
2
2
2
2
1'
1'
cv
xcvt
t
cvvtxx
PRIMER POSTULADO“Las leyes de la física han de ser inva
DE LA RELATIVIDAD riantes para todo observador inercial”
-1888.- emisión y recepción de una onda de radio.
