procesamiento digital de señales - fimee.ugto.mx · ejemplo: la respuesta al impulso de un...
TRANSCRIPT
Procesamiento Digital de SeñalesCE16.10L2
Tema 4. Caracterización de Sistemas Discretos

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Caracterización de Sistemas DiscretosLos sistemas discretos pueden ser caracterizados en diferentes formas:
Respuesta al Impulso (tiempo)Ecuaciones de diferencias lineales con coeficientes constantes (tiempo)Respuesta en frecuencia (frecuencia)Función de transferencia (frecuencia)
Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
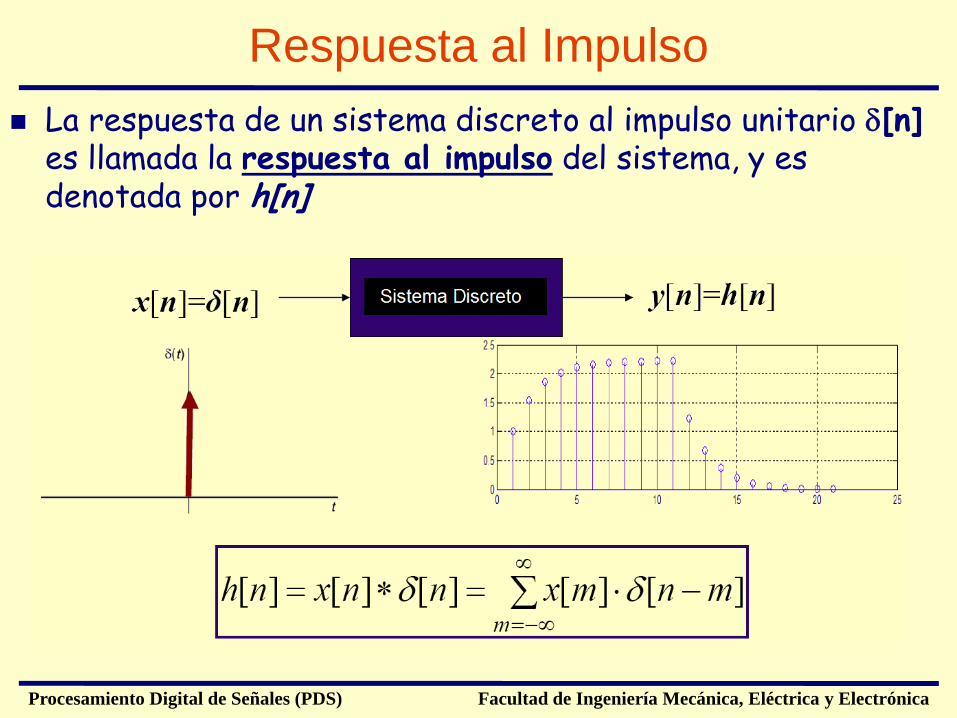
Respuesta al ImpulsoLa respuesta de un sistema discreto al impulso unitario δ[n]es llamada la respuesta al impulso del sistema, y es denotada por h[n]

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Respuesta al ImpulsoEjemplo: Consideremos el siguiente sistema:
La respuesta al impulso de este sistema, se obtiene remplazando la entrada con una secuencia impulso:

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ejemplo con operaciones básicasEjemplo: La ecuación del acumulador en tiempo discreto es:
Cual es la respuesta al impulso?es obtenida remplazando lo que resulta en

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Respuesta al impulsoEjemplo: La respuesta al impulso de un interpolador de factor 2:
es obtenida remplazando y esta dada por
La respuesta al impulso es por lo tanto una secuencia finita de longitud 3:

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Respuesta al impulsoLa respuesta al impulso juega un papel importante en la caracterización de los sistemas LTI:
De echo, si conocemos la respuesta al impulso de un sistema discreto LTI, entonces podremos conocer la respuesta del sistema a cualquier entrada arbitraria.Dime h[n], y te diré la respuesta a cualquier x[n]

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Respuesta al ImpulsoConsideremos el siguiente ejemplo:
Recordemos que cualquier secuencia puede ser representada como una suma de impulsos:

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Respuesta al impulso en sistemas LTIPara un sistema LTI, podemos sumar las respuestas individuales del sistema producidas por entradas individuales

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Continuando con el ejemplo

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
PropiedadesHay varias propiedades útiles de la convolución y la caracterización de la respuesta al impulso de un sistema:
Un sistema LTI es BIBO estable, si su respuesta al impulso es absolutamente sumable
Un sistema LTI es causal, si su respuesta al impulso es una secuencia causal, es decir h[n]=0, para n<0.
Si mas de un sistema esta conectado en cascada o paralelo, la respuesta al impulso efectiva puede calcularse de la siguiente forma
Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
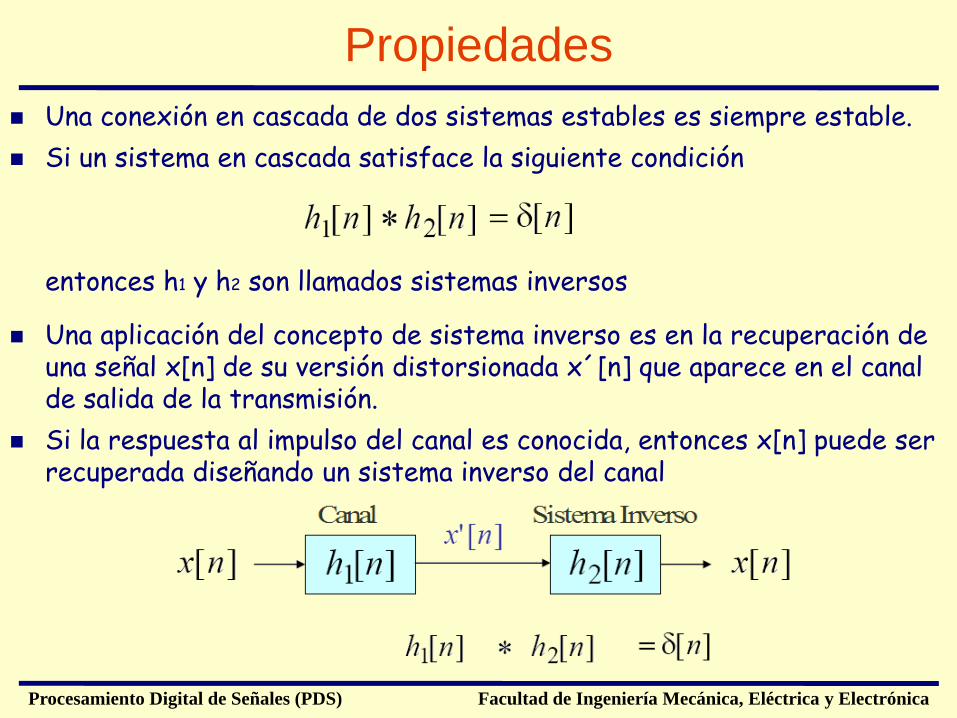
PropiedadesUna conexión en cascada de dos sistemas estables es siempre estable.Si un sistema en cascada satisface la siguiente condición
entonces h1 y h2 son llamados sistemas inversos
Una aplicación del concepto de sistema inverso es en la recuperación de una señal x[n] de su versión distorsionada x´[n] que aparece en el canal de salida de la transmisión. Si la respuesta al impulso del canal es conocida, entonces x[n] puede ser recuperada diseñando un sistema inverso del canal

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Sistemas de Respuesta Finita al ImpulsoSi la respuesta al impulso h[n] de un sistema es de longitud finita, este sistema es llamado como sistema de Respuesta Finita al Impulso (FIR).
La salida de este sistema puede ser calculada como una Convolución finita
Por ejemplo, h[n]]=[1 2 0 -1] es un sistema FIR
Los sistemas FIR son llamados no recursivos, que son los cuales donde la salida puede obtenerse únicamente de los valores de entrada presentes y pasados. No requiere de los valores de salida pasados .

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Sistemas de Respuesta Infinita al ImpulsoSi la respuesta del impulso es de longitud infinita, entonces el sistema es llamado de Respuesta Infinita al Impulso (IIR). Por lo mismo estos sistemas no pueden ser caracterizados con la convolución en virtud de que tendríamos una suma infinita.
En su lugar, estos sistemas son caracterizados por ecuaciones de diferencias lineales con coeficientes constantes, como lo veremos mas adelante.Recordemos el acumulador y su representación alterna, la cual es mas compacta.
La respuesta al impulso de este sistema (el cual es de longitud infinita), no puede ser representado con una convolución finita. Notemos que desde que la salida actual depende de las salidas anteriores, entonces este sistema es llamado recursivo.

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Ecuaciones de Diferencias con Coeficientes ConstantesTodos los sistemas discretos pueden ser representados usando ecuaciones de diferencias con coeficientes constantes de la forma:
Los coeficientes cons. ai y bi son llamados los coeficientes del filtro.
Los enteros M y N, representan el máximo retardo en la entrada y salida respectivamente. El mayor de estos dos es conocido como el orden del filtro.

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
Sistemas FIREsta ecuación representa la forma mas general de un sistema LTI:
Si la salida actual y[n] no depende de las salidas anteriores y[n-i], es decir, si para todas las ai=0 (excepto a0=1), entonces es un sistema no recursivo tal como los sistemas FIR.
Notemos que la respuesta al impulso de un sistema FIR puede ser fácilmente obtenida de su representación de EDLCC:
La suma de números finitos, siempre será finita, por lo tanto, la respuesta al impulso de este sistema siempre será finita, por lo tanto será FIR.
Respuesta Finita al Impulso No Recursivo
Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
SISTEMAS FIR
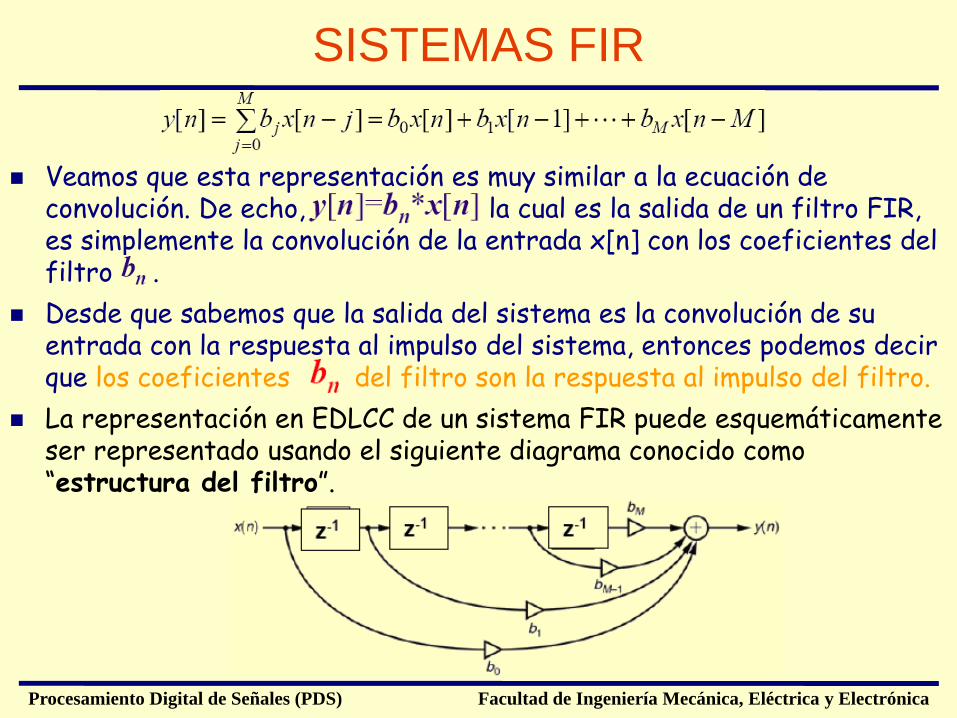
Veamos que esta representación es muy similar a la ecuación de convolución. De echo, la cual es la salida de un filtro FIR, es simplemente la convolución de la entrada x[n] con los coeficientes del filtro . Desde que sabemos que la salida del sistema es la convolución de su entrada con la respuesta al impulso del sistema, entonces podemos decir que los coeficientes del filtro son la respuesta al impulso del filtro.La representación en EDLCC de un sistema FIR puede esquemáticamente ser representado usando el siguiente diagrama conocido como “estructura del filtro”.

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
SISTEMAS IIRSi las ai son diferente de cero en la expresion general, entonces la salida depende de las salidas pasadas, y por lo tanto este es un sistema recursivo.La respuesta al impulso de un sistema IIR no puede ser representada como una convolución finita debido a la recursividad del sistema.La estructura del filtro IIR, la cual tiene un distinto lazo de retroalimentación, tiene la siguiente estructura:

Procesamiento Digital de Señales (PDS) Facultad de Ingeniería Mecánica, Eléctrica y Electrónica
FIN