presentación unidad didáctica -...
TRANSCRIPT

Unidad Didáctica
Control y Robótica
4º ESO

1. Introducción. Tipos de trabajos según el grado de
automatización.
a) Trabajo artesanal
Hombre con funciones
de motor, operario y
controlador.
b) Trabajo mecánico c) Trabajo automático
Hombre con funciones
de supervisor.
Hombre con funciones de
operario y controlador.

1º- Herramientas de
uso cotidiano
2º- Herramientas
especializadas 3º- Máquinas
herramientas
2. Evolución de los sistemas automáticos según
las herramientas. (I)

4º- Sistemas automáticos
2. Evolución de los sistemas automáticos (II)

2º- Máquinas herramientas1º- Herramientas manuales
3. Mecanización.
Procesos de trabajo en el que interviene el uso de herramientas por parte del
ser humano. Pueden ser de 2 tipos:

El término griego "automatos" significa que se mueve por el mismo.
La automatización, actualmente, se emplea en la obtención de productos sin
la necesidad de intervención humana
4. Automatización.

5. Robótica y Robot.
- La robótica es una rama de la tecnología, que estudia el diseño yconstrucción de máquinas capaces de desempeñar tareas peligrosas oimposibles para el ser humano. La robótica combina diversas disciplinas comoson: la mecánica, la electrónica, la informática, la inteligencia artificial así comomás importante el álgebra.
- Un robot es una máquina mecánica o autómata, que reemplaza al serhumano en su trabajo. El término robot lo popularizó Karel Capek en 1920, lapalabra checa robota, que significa trabajos forzados, fue traducida al ingléscomo robot.
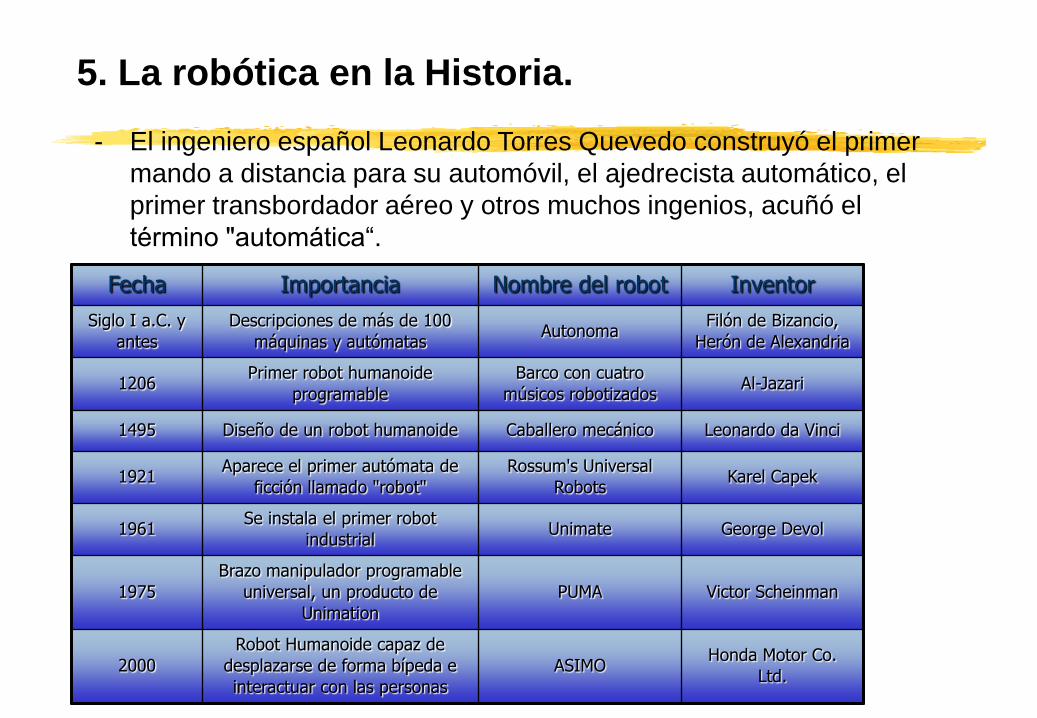
5. La robótica en la Historia.
- El ingeniero español Leonardo Torres Quevedo construyó el primer
mando a distancia para su automóvil, el ajedrecista automático, el
primer transbordador aéreo y otros muchos ingenios, acuñó el
término "automática“.
Fecha Importancia Nombre del robot Inventor
Siglo I a.C. y
antes
Descripciones de más de 100
máquinas y autómatas Autonoma
Filón de Bizancio,
Herón de Alexandria
1206Primer robot humanoide
programable
Barco con cuatro
músicos robotizados Al-Jazari
1495 Diseño de un robot humanoide Caballero mecánico Leonardo da Vinci
1921Aparece el primer autómata de
ficción llamado "robot"
Rossum's Universal
RobotsKarel Capek
1961 Se instala el primer robot
industrial Unimate George Devol
1975
Brazo manipulador programable
universal, un producto de
Unimation
PUMA Victor Scheinman
2000
Robot Humanoide capaz de
desplazarse de forma bípeda e
interactuar con las personas
ASIMO Honda Motor Co.
Ltd.

a) Según sus aplicaciones, los robots se pueden clasificar en:
- 6.1. Industriales y manipuladores.
- 6.2. Móviles o vehículos robot.
- 6.3. Prótesis para uso humano.
- 6.4. Didácticos o experimentales.
- 6.5. Manos teledirigidas o telechirs.
- 6.6. Instalaciones inteligente.
- 6.7. Microrrobots o nanorobots.
6. Tipos de robots. Según sus aplicaciones.

- Suelen tener forma de brazo articulado,
en cuyo extremo incorporan elementos
de sujeción o herramientas.
- Realizan tareas repetitivas en industrias
de automoción, fabricación mecánica o
electrónica en las que se emplean para
montar y mover piezas o componentes,
soldar, pintar …
6.1. Industriales o manipuladores.

- Se desplazan empleando ruedas, orugas o
patas articuladas, y se utilizan par
suministrar herramientas o materiales a los
manipuladores, para transportar materiales
peligrosos, para construir túneles …
6.2. Móviles o vehículos robot.
- Son dispositivos electromecánicos que realizan el trabajo de las
manos, los dedos o las piernas de los seres humanos.
6.3. Prótesis para uso humano.

- Se utilizan para la enseñanza y el aprendizaje
de la robótica.
6.4. Didácticos o experimentales.

- Se destinan a manipular productos
reactivos o peligrosos y a
colaborar en operaciones
quirúrgicas controladas de forma
remota por cirujanos expertos.
6.5. Manos Teledirigidas o telechirs.
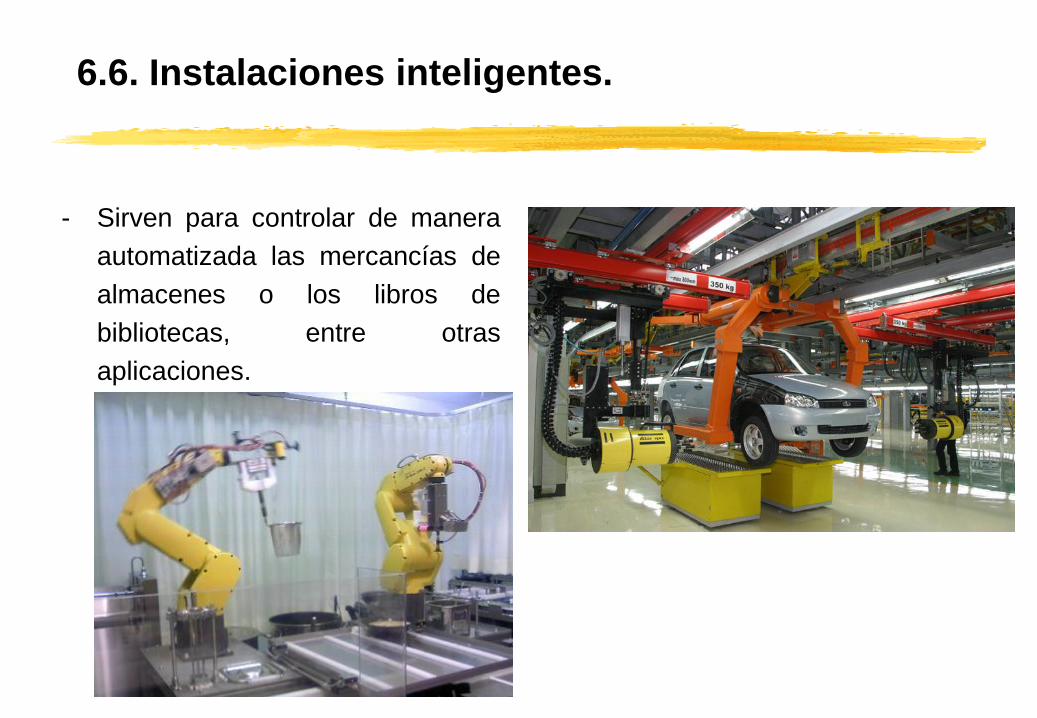
- Sirven para controlar de manera
automatizada las mercancías de
almacenes o los libros de
bibliotecas, entre otras
aplicaciones.
6.6. Instalaciones inteligentes.

Dispositivos de un tamaño de centímetros o milímetros con los que se actúa,
por ejemplo, en el cuerpo humano para realizar intervenciones.
6.7. Microrrobots y nanorobots.

Cartesiano Cilíndrico Esférico o polar
ArticuladoAntropomórfico
6. Tipos de robots. Según sus grados de movimiento.
b)Según sus grados de movimiento.
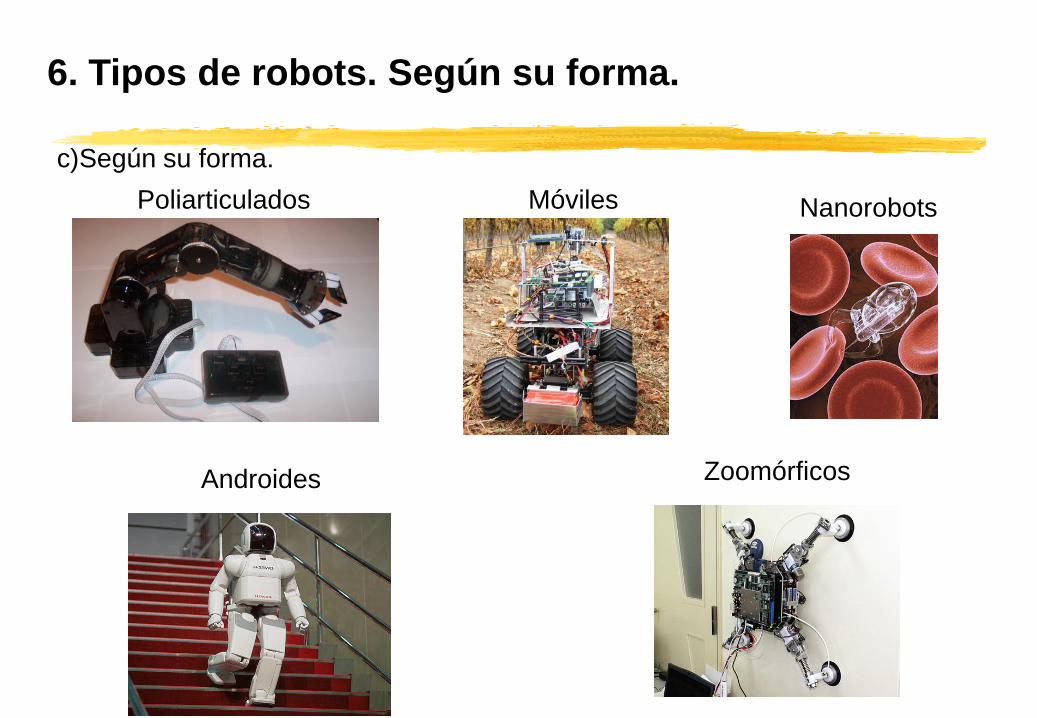
Zoomórficos
Nanorobots
Androides
MóvilesPoliarticulados
6. Tipos de robots. Según su forma.
c)Según su forma.
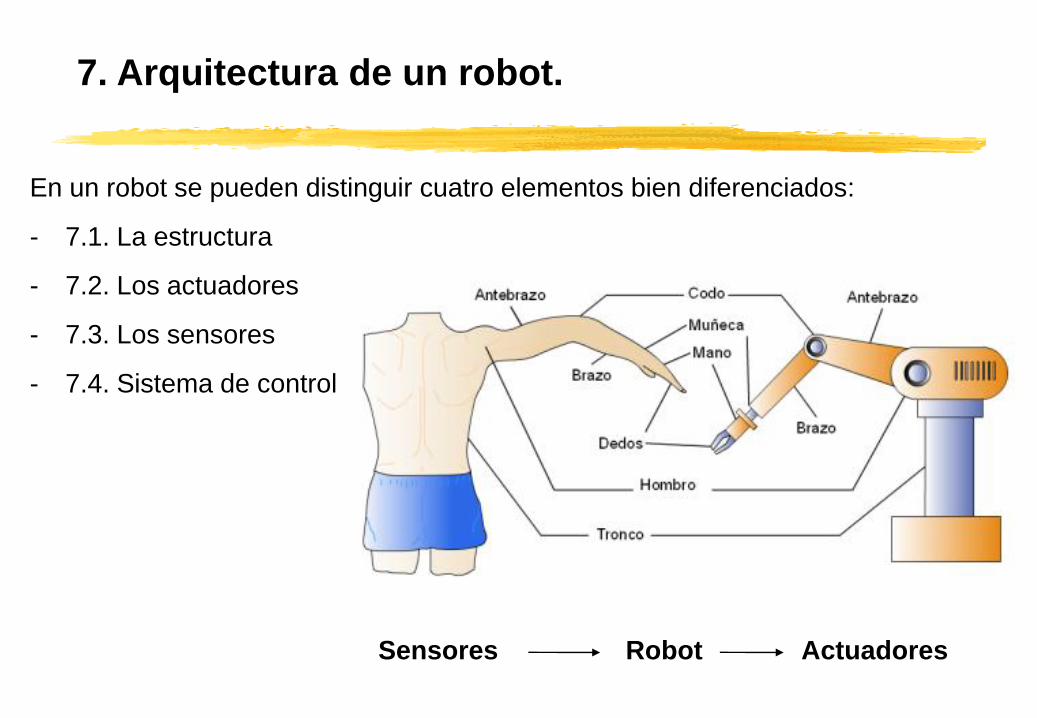
En un robot se pueden distinguir cuatro elementos bien diferenciados:
- 7.1. La estructura
- 7.2. Los actuadores
- 7.3. Los sensores
- 7.4. Sistema de control
7. Arquitectura de un robot.
Sensores ActuadoresRobot

Es el esqueleto del robot y está constituido por los mecanismos y
articulaciones que permiten su movimiento
7.1. La estructura.

Son los elementos que a modo de músculos se encargan de suministrar la
fuerza necesaria para mover la estructura del robot.
– Actuadores eléctricos.
– Actuadores neumáticos.
– Actuadores hidráulicos.
7.2. Los actuadores (I).

De impulsión, motores y cilindrosContactores y relés
Electroválvulas Pinzas
7.2. Los actuadores (II).

Son los sentidos del robot, es decir constituyen un conjunto de elementos
que le permiten conocer el estado del mundo que le rodea y la posición
exacta de sus componentes.
Algunos tipos de sensores electrónicos:
» Sensores de temperatura.
» Sensores de deformación.
» Sensores de acidez.
» Sensores de luz.
» Sensores de contacto.
» Sensores de proximidad.
7.3. Los sensores (I).

Proximidad Temperatura Magnéticos Sonido Presión
Iluminación InclinaciónTáctil, piel robótica
Microinterruptores
7.3. Los sensores (II).

Es el cerebro del robot. En función de las tareas que desempeña el robot, es
más o menos complejo.
Existen diferentes sistemas para controlar los robots, los más importantes
son:
- Controladores de secuencia fija o variable a lazo abierto.
- Controladores de secuencia variable por realimentación
interna.
- Controladores inteligentes o de realimentación externa.
7.4. Los sistemas de control.