podador
DESCRIPTION
Prototipo de podadorTRANSCRIPT

UNIVERSIDAD AUTÓNOMA CHAPINGODEPARTAMENTO DE INGENIERIA MECÁNICA AGRÍCOLA.
MANEJO DE INVERNADEROS.
PROYECTO FINAL DE CURSO.
“DISEÑO Y CONSTRUCCIÓN DE UN ROBOT PODADOR DE
PLANTAS HORTILCOLAS DE INVERNADERO”.
PRESENTA:
AGUILAR HERNÁNDEZ GUILLERMOCORONADO SAUCEDO JOSE MANUEL
GAYTÁN CAMPOS ISRAEL
GRADO: 7° GRUPO: “1”
PROFESOR:
ARMANDO RAMIREZ ARIAS
CHAPINGO, EDO. MÉXICO; 08 DE DICIEMBRE DE 2014.
1. INTRODUCCION.
La automatización de los procesos es la sustitución de tareas tradicionalmente
manuales por las mismas realizadas de manera automática por máquinas, robots
o cualquier otro tipo de automatismo.
La automatización tiene ventajas muy evidentes en los procesos que se
desarrollan de modo manual. Se mejora en costes, en servicio y en calidad. El
trabajo es más rápido y no necesita de una cantidad determinada de operarios,
que antes eran necesarios.
Además se producen menos problemas de calidad por realizarse el trabajo de una
manera más uniforme debido a las especificaciones dadas al automatismo. Otras
ventajas se obtienen de la automatización son el aumento de producción, menor
gasto energético, mayor seguridad para los trabajadores.
Ahora bien, el presente proyecto está enfocado a diseñar y construir un robot
podador de plantas hortícolas de invernadero.
Este proyecto se justifica dado a que la poda plantas hortícolas modo manual es
un proceso tedioso, complejo, repetitivo que requiere de personal capacitado y
cuidadoso; por lo que el automatizar este proceso a través de un robot podador
de plantas hortícolas traerá beneficios que pueden verse reflejados en el aumento
de la productividad de las plantas, la calidad de los frutos y además se garantiza
una o más pasadas por planta para realizar el podado.
Al podar las partes inútiles de una cierta planta es de vital importancia evitar
lastimar a la planta más allá de lo permisible (se debe garantizar el corte de la
parte inútil), también se debe evitar infectar a la planta; esto se logra con un
manejo cuidadoso y tedioso de la planta al cortar la yema, además de esterilizar
frecuentemente la herramienta de corte para evitar infectar a la planta de un hongo
o enfermedad.
El autómata que se pretende diseñar y construir permitirá automatizar la poda, que
ciertas plantas de manejo en invernadero exigen a los productores.

Este robot será programado y controlado para trabajar en plantas en edad de ser
podadas, tendrá desplazamiento autónomo y permitirá el corte de las yemas
axilares por medio de unas tenazas cortadoras que estarán eslabonadas a un
brazo robótico de 6 grados de libertad que permitirán que el brazo se viable para
cortar las yemas axilares en cualquier posición de la planta.

2. OBJETIVOS.
Diseñar y construir en Solidworks un posible prototipo de robot para podar las a
plantas hortícolas de invernadero.
3. HIPOTESIS.
Con el diseño y la construcción de un robot podador de plantas hortícolas de
invernadero se prevé que traiga consigo aumento en la eficiencia, calidad,
seguridad y productividad del proceso de poda y en consecuencia un ahorro
económico en los costes del proceso.

4. REVISIÓN BIBLIOGRÁFICA.
4.1. DEFINICIÓN DE PODA
Podar: Podar a las plantas es eliminar exceso de follaje y tallos, esto permite una
mayor sanidad de la planta e incluso incrementa la producción y la cosecha, cada
planta tiene sus particularidades al momento de realizar la poda.
4.1.1. Poda de los cultivos hortícolas.
Cada vez más se ha intensificado la práctica de la poda en cultivos hortícolas
intensivos, pues, el corto período de tiempo que transcurre en el invernadero, el
deseo de obtener la mayor rentabilidad, la utilización de marcos de plantación muy
estrechos, etc. obliga a realizar éstas prácticas con objeto de encauzar el
crecimiento y desarrollo de la planta a formas más productivas.
En la actualidad la mayoría de los cultivos se someten a las operaciones de poda;
aunque en cada uno de ellos pueden tener objetivos diferentes.
En general, la poda de las hortalizas en invernadero se dirige a dejar uno o varios
tallos, eliminando determinados brotes, hojas, frutos y los chupones que por su
excesivo desarrollo apenas fructifican.
Cada especie vegetal tiene una poda característica y que depende del marco de
plantación, forma de vegetar y fructificar, y la climatología del lugar. Por último, la
poda ha de realizarse de forma racional y con un criterio económico.
4.2. OBJETIVOS DE LA PODA.
Con la poda se pretende mantener las plantas con la vegetación suficiente, en sus
justos límites, a fin de conseguir precocidad y calidad, así como obtener, en
muchos casos, una mayor producción. Es necesario tener en cuenta que dicho
control y conformación del desarrollo estará siempre limitado por la fisiología de la
planta. Para ello se suprimen órganos improductivos e inútiles, enfermos o que
entorpezcan el desarrollo de la planta.
También se persigue con la poda, conformar la planta limitando el número de
ramas y brotaciones para que se facilite las labores culturales y, en ocasiones,
incrementar el número de plantas al reducir el marco de plantación.
Igualmente en algunas especies, con excesiva vegetación, la poda favorece la
aireación e iluminación en el interior de la planta y reduce la incidencia de algunas
plagas y enfermedades.
4.3. VENTAJAS E INCONVENIENTES DE LA PODA
Con la poda se consigue:
Se disminuye el área foliar, ejerciendo un buen efecto en el control de
enfermedades (Al suprimir órganos enfermos se reduce la difusión de
algunas plagas y enfermedades).
Obtener la mayor parte de frutos de primera calidad
Existe mayor precocidad en la maduración de los frutos
Facilita la recolección de frutos
Mayor precocidad y más calidad de los frutos, de mejor tamaño y
uniformidad.
Se facilitan las prácticas culturales (tratamientos, recolección, entutorados,
etc.).
Se regulariza la producción.
Posibilidad de cultivar plantas con marcos más reducidos.
Inconvenientes:
La poda al no realizarla en el tiempo oportuno se corre el riesgo de inducir a
la entrada de patógenos causantes de enfermedades.
Sin embargo, y antes de realizar las operaciones de poda, en determinados
cultivos, hay que prever la rentabilidad, pues la mano de obra necesaria puede
ocasionar, a veces, la no conveniencia de llevar a cabo esta práctica.
También, tras una poda muy enérgica, la planta puede sufrir trastornos vegetativos
con parada del crecimiento.

4.4. PRINCIPIOS GENERALES DE LA PODA.
Antes de llevar a cabo cualquier sistema de poda se ha de tener en cuenta
algunas consideraciones:
Es de sobra conocido que la fructificación y el desarrollo vegetativo son
contrapuestos, por lo que una planta con excesiva vegetación es deficiente en
número de flores. La poda puede ser muy útil para equilibrar ambas funciones. Por
otra parte las plantas que se dejan desarrollar libremente, sin que actúe ningún
tipo de poda, pueden producir una vegetación muy abundante en detrimento de la
floración, obteniendo frutos de irregular tamaño y escasa calidad.
La savia bruta tiende a irse, preferentemente hacia las partes más altas,
más iluminadas y más jóvenes de la planta. El crecimiento debe ser
orientado para conseguir mejor exposición a la luz.
Si forzamos con exceso la formación de flores y frutos, la planta tiende a
debilitarse. Del equilibrio entre el sistema radicular y las hojas depende la
floración y fructificación. El desarrollo delas raíces está en función de las
exigencias de la parte aérea, de tal forma, que si se produce una
disminución enérgica de ramas, hojas y brotes, al podar, influye
negativamente en el desarrollo del sistema radicular.
La conformación producida por la poda produce una alteración fisiológica
causada por el desequilibrio en la producción normal de auxinas y que se
manifiesta en la floración y fructificación, principalmente.
4.5. PRACTICA DE LA PODA
La práctica de la poda ha de ir coordinada con el resto de labores culturales
-abonado, riegos, tratamientos- y principalmente muy interrelacionado con el
marco de plantación establecido.
Epoca. Depende de la fecha de siembra o plantación y de cada especie
vegetal. No obstante hay que tener en cuenta, además, lo siguiente: Los
brotes a eliminar hay que cortarlos cuanto antes para evitar pérdidas de

materia vegetal y posibles desequilibrios fisiológicos, si se cortan muy
desarrollados.
Es preferible realizar las podas por la mañana ya que la cicatrización es
más rápida que si se hace al atardecer.
Forma. Los cortes de poda han de ser limpios, sin producir desgarros. A
veces y para proteger los cortes es frecuente cubrir las heridas con productos
preparados al efecto.
Es importante realizar esta práctica principalmente para cultivares de
crecimiento indeterminado. Para realizarla debemos asegurarnos que la
planta se encuentre sana, libre de enfermedades, principalmente de virus.
Cuando se poda por encima de una yema, y para facilitar la brotación de
una nueva rama, hay que dejar entre el corte y la yema algunas hojas que
actúen de tira-savia y favorezca dicha brotación.
Utensilios: Los cortes de poda han de hacerse con los utensilios adecuados
o manualmente y de acuerdo con la clase de poda que se haga.
Para llevar a cabo la poda en hortalizas se utiliza el cuchillo y la tijera de
podar; en tallos delgados y despuntes, etc., manualmente.
Para llevar a cabo cualquier sistema de poda se tiene en cuenta entre otros:
Fisiología de la planta.
Crecimiento y fructificación.
Vigor.
Marco de plantación.
Época, etc.
4.6. CLASES DE PODA
a) Por el objetivo que se persigue.
1) Poda de Formación.-Se dirige principalmente, a conformar la planta de
acuerdo con el número de brazos que se dese que tenga, según las
características de suelo, clima, sistema de cultivo, marco de plantación y
naturaleza de la planta. Hay que procurar distribuir regularmente la savia para que
todos los órganos vegetativos la reciban.
La Poda de Formación se inicia, en algunas especies hortícolas, desde el
semillero; aunque lo usual es que se realice a partir de la plantación.
También se pretende con la poda de formación facilitar, posteriormente, las
operaciones culturales, tratamientos, recolección, entutorado, etc.
2) Poda de Producción o Fructificación.-Tiene como único objetivo mantener la
forma de la planta, regulando su producción para que sea abundante y de calidad.
Para ello se deberá de mantener un equilibrio entre el sistema radicular y la
actividad de las hojas. También, durante la poda de Fructificación, se eliminan las
brotaciones enfermas, mal situadas, chupones, hojas, frutos, etc. de acuerdo con
lo expuesto en los apartados correspondientes.
3) Poda de Regeneración.-Tiene por objeto hacer brotar de nuevo la planta,
cuando ésta ya se encuentra en decadencia tras las últimas recolecciones. Esta
operación lleva consigo una supresión importante de masa vegetal que rompe el
equilibrio existente de nutrientes entre raíz y tallos, por lo que la planta responde,
posteriormente, con un rápido crecimiento rejuvenecedor. Se aplica en Berenjena
y Pimiento para conseguir una nueva brotación tras el ciclo normal de cultivo.
b) Por los órganos que suprime.
1) Poda de hojas.-También llamada "deshojado". Como sabemos, las hojas se
encargan de transformar la savia bruta en savia elaborada por medio de la
fotosíntesis; pero, a veces, las plantas tienen tal exceso de hojas que pueden
cubrirla, creando un ambiente húmedo en su interior e impidiendo que la luz llegue
a algunas hojas a las flores, a las yemas y a los frutos. Por ello y en determinadas
cultivos se Ilevan a cabo deshojados más o menos intensos.
Con la poda de hojas se aprovecha para eliminar las afectadas por enfermedades
y plagas, las no funcionales y viejas.

Generalmente el deshojado se inicia por la parte inferior de la planta, procurando
que dicha eliminación no provoque desequilibrios en la planta y no deje
desguarnecidos los órganos productivos a la acción directa del Sol, ya que puede
ocasionar, en determinados cultivos, quemaduras por la acción de los rayos
solares. En estos casos son necesarias las hojas para arropar a la planta.
Las hojas eliminadas y afectadas de plagas o enfermedades han de ser destruidas
por el fuego para evitar que sean foco y propagación de enfermedades y
parásitos.
2) Poda o aclareo de flores.- No es habitual en hortalizas la supresión de flores a
la planta; no obstante en algunas especies suele llevarse a cabo para limitar el
número de frutos o para impedir la polinización, o en plantas débiles.
3) Aclareo de frutos.-Se lleva a cabo para mejorar la calidad de los frutos
restantes. Se aplica a frutos dañados por plagas y enfermedades, deformados,
recién cuajados, con excesivo desarrollo o en número excesivo. Su objetivo es
dejar un número de frutos que esté de acuerdo con las características vegetativas
de las plantas.
4) Poda de yemas y brotes terminales.-También llamado pinzamiento y
despunte. Tiene por objeto eliminar la dominancia de la yema terminal o brote de
los tallos guía para que se paralice el crecimiento de dicho tallo en beneficio de
otras yemas o brotes. Con ello se favorece la formación de otros órganos de
producción. EI corte se hace en el extremo de la rama o tallo y por debajo de una
yema.
5) Destallados.-En determinados cultivos se realiza la supresión de brotes en el
tallo principal y en ramas laterales mediante el corte total de dichos brotes, al
objeto de estimular el crecimiento en longitud del tronco de la planta y de las
ramas afectadas. La práctica consiste en dejar uno o varios tallos en la planta
eliminando los brotes que salen de los tallos principales.
4.7. FACTORES A CONSIDERAR PARA REALIZAR LA PODA.
1. Variedad o cultivar
2. Tipo de poda
3. Momento para realizar la poda
4. Distanciamiento de siembra
5. Intensidad y severidad de la poda de acuerdo a la época
6. Disponibilidad de mano de obra
Variedad o cultivar
De acuerdo a la variedad o cultivar, se debe tener cuidado en seleccionar el tipo
de poda, ya que se puede alterar el crecimiento normal de la planta.
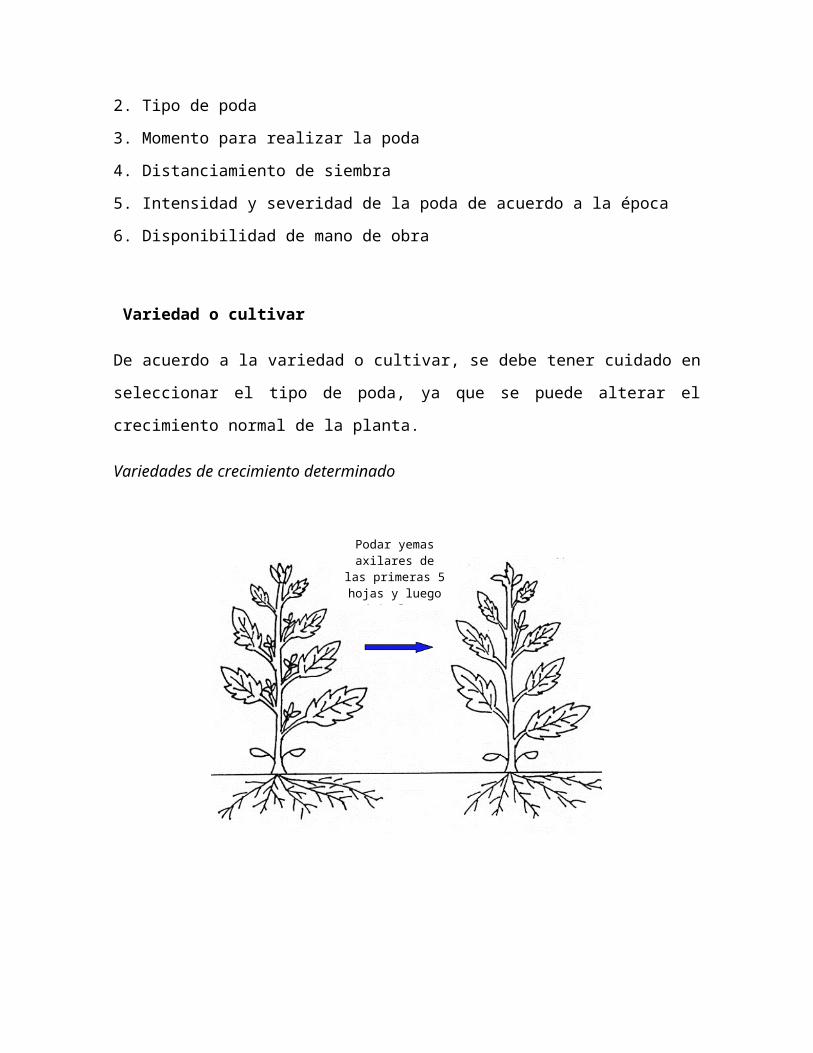
Variedades de crecimiento determinado
Podar yemas axilares de las
primeras 5 hojas y luego dejarla a libre
crecimiento

Variedades de crecimiento indeterminado (poda a un eje)
Variedades de crecimiento indeterminado (poda a dos o más ejes)
Poda a un eje eliminando todos los
brotes axilares.
Poda a dos ejes dejar crecer el brote axilar de la 7 u 8 hoja como segundo eje y continuar a partir de este, eliminando los brotes a medida vayan apareciendo
Momento para realizar la poda
Se inicia eliminando los brotes axilares cuando aparece el primer racimo floral. La
poda deberá continuarse observando que los brotes no sobrepasan los 5 cm.
Evitar realizar podas en períodos con alta incidencia de mosca blanca y cuando el
ambiente este demasiado húmedo. Intensidad y severidad de la poda de acuerdo
a la época. En época lluviosa se puede efectuar podas más severas, en cambio en
la época seca se debe realizar de una forma menos severa para no limitar el
desarrollo de la planta.
4.7. PORQUE AUTOMATIZAR UN PROCESO
Hoy en día la automatización de procesos es uno de los factores determinantes en
la mejora de la competitividad de las empresas. Alcanzar este objetivo requiere
mejora de la calidad, la productividad, la eficiencia y trabajar en la mejora
continua.
Como se ha visto, las tendencias de globalización y segmentación internacional de
los mercados son cada vez más acentuadas. Y como estrategia para enfrentar
este nuevo escenario, la automatización representa una alternativa que es
necesario considerar; los países de mayor desarrollo, poseen una gran
experiencia en cuanto a automatización se refiere y los problemas que ellos
enfrentan en la actualidad son de características distintas a los nuestros. La
palabra automatización proviene de la palabra griega automatos, que significa
“semejante a la forma en que tu mente trabaja” o actuación propia; Por lo cual se
puede definir la automatización como la tecnología utilizada para realizar procesos
o procedimientos sin la ayuda de las personas.
La decisión de por qué automatizar y cómo hacerlo debe basarse en un estudio
profundo de las necesidades reales que se tienen. Es decir, es realmente
prioritario sustituir de forma casi inmediata gran parte de los procesos por un

sistema autónomo.
Se puede decir que la automatización de un proceso reduce ampliamente la
necesidad sensorial y mental del ser humano en el desarrollo del mismo
permitiendo así obtener la optimización de costos, al automatizar procesos y
liberar recursos para otras tareas; el incremento de la calidad, mediante la
eliminación de errores manuales; y el aumento de la productividad, al reducir el
tiempo total de producción; entonces podemos evaluar ¿por qué automatizar un
proceso?
4.7.1. Factores clave para justificar la automatización de los procesos.
Cuando los volúmenes de producción son altos.
Cuando la complejidad del proceso es alta.
Cuando el costo de la mano de obra es alto o su disponibilidad es poca.
Cuando se tienen tareas poco dignas (rutinarias, ambientes nocivos, fuerza
excesiva).
Cuando la disponibilidad tecnológica lo establece.
Cuando se quieren reducir tiempos por muertos por detección de fallas.
Reducir los costos de producción.
Para mejorar la calidad del producto.
Plazos de entrega más breves.
Mayores exigencias por parte de los clientes.
Mejorar el cumplimiento de los plazos de entrega.
Situación del mercado.
De lo antes expuesto la automatización solo es viable si al evaluar los beneficios
económicos y sociales de las mejoras que se podrían obtener al automatizar,
estas son mayores a los costos de operación y mantenimiento del sistema; se
puede resaltar los siguientes beneficios: Disminución de la contaminación y daño
ambiental; Racionalización y uso eficiente de la energía y la materia prima;
Aumento en la seguridad de las instalaciones y la protección a los trabajadores.
La verdad, la recomendación es no automatizar todo. No debemos pretender
resolver todo de una vez, debemos hacerlo poco a poco. Iniciando por el proceso
que sea más crítico y tener bien claro las necesidades. Por lo general, los usuarios
no están suficientemente claros en lo que quieren, y los requerimientos cambian a
medida que pasa el tiempo, es por ello es preferible desarrollar o implantar una
funcionalidad básica y dejar que el usuario use el sistema y así con el tiempo se
van descubriendo y satisfaciendo el resto de las necesidades.
Por último y para concluir es muy importante tener claras las necesidades reales y
cuáles son los objetivos y beneficios de una automatización, a fin de poder orientar
los esfuerzos en dicha dirección y así evitar que los recursos y los esfuerzos, se
dispersen en el intento, y por otro lado, también resulta de vital importancia contar
con una empresa que garantice la utilización de metodologías adecuadas.
5. METODOLOGIA A SEGUIR PARA LLEVAR ACABO EL
PROYECTO PLANTEADO.
1. ANTECEDENTES Y JUSTIFICACIÓN
¿Porque se eligió este proyecto?
La elección de este proyecto se justifica porque como ingenieros mecánicos
agrícolas estamos formados para automatizar el campo y creemos que
automatizar la poda de las plantas hortícolas de invernadero es un buen proyecto
al que se le dará seguimiento e incluso considerarse un tema de tesis, en el
presente anteproyecto (así lo llamamos nosotros) solo se hace una visión y la
construcción del robot idealizado para el objetivo, esto en el software Solidworks,
pero como un tema de tesis se plantea hacer todos los cálculos requeridos para el
diseño, la construcción, pruebe evaluación del prototipo (respetar las leyes de la
robótica). Se eligió este proyecto dado a que hoy en día la robótica se ha ido
relacionando muy bien con las actividades agrícolas, y además porque a nivel
mundial los invernaderos demandan día a día más automatización, por lo que

automatizar el proceso de poda a través de un robot podador parece ser una
necesidad emergente en manejo de invernaderos.
1.1. Importancia de poda de plantas hortícolas en México y el mundo.
1.2. Métodos y dispositivos para la poda de plantas hortícolas.
1.3. La necesidad de automatizar el proceso de siembra del Hongo seta.
2. PROPIEDADES FISICOMECÁNICAS DE LAS PLANTAS HORTICOLAS.
2.1. Investigación de las propiedades físico-mecánicas de las plantas
hortícolas de invernadero
2.2. Determinación de la energía requerida para poda de las plantas
hortícolas de invernadero
2.3. Metodología para la determinación de la energía de poda según una
variedad de planta especificada.
2.4. Resultados de la energía específica de poda.
3. DISEÑO CONCEPTUAL DEL PROTOTIPO.
3.1. Generalidades sobre el diseño conceptual.
3.2. Identificación o reconocimiento de la necesidad.
3.3. Definición del problema.
3.4. Generación de alternativas de solución.
3.4.1. Establecimiento de la estructura de las funciones.
3.4.2. Búsqueda de principios de solución para satisfacer las sub-
funciones.
3.5. Evaluación y selección de la mejor alternativa.
3.5.1. Identificación de los criterios de evaluación.
3.5.2. Construcción del árbol de objetivos.
3.5.3. Carta de evaluación.
3.6. Diseño preliminar.
5. CONSTRUCCIÓN DEL PROTOTIPO

5.1. Definición de manufactura. 5.2. Desarrollo de las hojas de proceso de producción. 5.3. Fabricación de los elementos. 5.4. Ensamble del prototipo.
4. DISEÑO DETALLADO DE LOS PRINCIPALES ELEMENTOS DEL
PROTOTIPO.
4.1. Generalidades. 4.2. Diseño del sistema de identificación de plantas, partes de la planta a cortar por visión artificial.4.3. Diseño del sistema de sujeción de la planta a podar.4.4. Diseño del sistema de control y programación del robot podador.4.5. Diseño del sistema de desplazamiento autónomo dentro del invernadero.4.6. Diseño del sistema eléctrico y neumático del robot podador.4.7. Diseño del sistema de corte.4.8. Diseño del sistema de esterilización automática al sistema de corte.
Los puntos de diseño según el caso incluyen.
Parámetros principales Cálculo de tracción. Cálculo de la fuerza de tracción y la potencia. Selección de la cadena de tracción. Selección de la catarina. Cálculo de la transmisión de engranajes rectos. Cálculo de la transmisión de cadena. Cálculo del diámetro del árbol de la catarina motriz. Selección de los rodamientos.
6. METODOLOGÍA DE EVALUACIÓN Y PRUEBA
6.1. Definición de prueba y evaluación. 6.2. Pruebas sin carga del prototipo (vacío). 6.3. Pruebas con material de trabajo (con carga).6.4. Metodología de prueba del prototipo. 6.4.1. Estudio de las condiciones del cultivo. 6.4.2. Prueba de calidad. 6.4.3. Prueba de rendimiento.
6.4.4. Prueba de requerimiento de potencia.
7. RESULTADOS DE LAS PRUEBAS Y EVALUACIONES DEL PROTOTIPO
7.1. Estudio de las condiciones de poda. 7.2. Prueba de calidad. 7.3. Prueba de rendimiento. 7.4. Requerimiento de potencia. 8. ANÁLISIS ECONÓMICO
8.1. Costo para la construcción del prototipo. 8.1.1. Costo de los materiales para la construcción del prototipo. 8.1.2. Costo de la mano de obra requerida. 8.1.3. Costo por el uso de instalaciones. 8.1.4. Costo por consumo de energía eléctrica. 8.2. Costo horario total del prototipo. 8.2.1. Costos fijos. 8.2.2. Costos de consumo. 8.2.3. Costos de operación.
6. CONCLUSIONES.
Se realizó un prototipo de robot podador de plantas hortícolas de invernadero en
el software solidworks, a continuación se presentan los dibujos de pieza
realizados y una explicación de la función de cada parte del robot

Sistema de desplazamiento autónomo de 4
neumáticos diseñado para superficies
adversas
Webcam, para monitorear el
trabajo del robot
Brazo robótico de 6 grados de libertad para conducir la herramienta de corte y hacer una buena poda

Chasis del robot podador
Herramienta de corte para la poda de ramas, hojas,
frutos, etc.
Sistema de detección por
ultrasonido
Circuito electrónico y programable para desplazamiento automático, activación y control de herramientas y circuito de energía

Enseguida de presentan las piezas dibujadas y precargadas en Solidworks .


Este robot podador a desarrollar debe estar especializado en el corte preciso y
Limpio de las partes inútiles de la planta en cuestión. Sus principales
características serán:
Cortes con precisión y calidad.
Operación de Día y noche.
vehículo móvil robotizado.
Ahorro de un 40 a 50% en mano de obra.

7. BIBLIOGRAFIA.
Mecatronica. (s.f). Automatización de procesos. [Documento en línea].
Disponible: http://mecatronica.blogcindario.com/2009/07/00015-
automatizacion-de-procesos.html. [Consulta 2014, Noviembre 19].
Kendall, K y Kendall, J (1997). Análisis y diseño de sistemas. (3ra. ed)
México: Pearson educación.
Reche, M.F. (1995). Poda de hortalizas en invernadero (calabacín, melón,
pepino y sandía). En revista ministerio de agricultura pesca y alimentación
[en línea] núm. 1-2/1995 HD. Secretaria general técnica, centro de
publicaciones. Paseo de Infanta Isabel Madrid, disponible en:
http://www.magrama.gob.es/ministerio/pags/biblioteca/hojas/hd_1995_01-
02.pdf [Acceso: el 7 de diciembre de 2014].
Reche, M.F. (1994). Poda de hortalizas en invernadero
(Berenjena,PimientoyTomate). En revista ministerio de agricultura pesca y
alimentación [en línea] Núm.2094 HD. Secretaria general técnica, centro de
publicaciones. Paseo de Infanta Isabel Madrid, disponible en:
http://www.magrama.gob.es/ministerio/pags/biblioteca/hojas/hd_1998_2094
.pdf [Acceso: el 7 de diciembre de 2014]