plc_guia
DESCRIPTION
Guía para PLCTRANSCRIPT
1
Control secuencial de procesos mediante PLC´s
- Control de aplicaciones industriales que requieren la conección y desconección de equipos:
- Máquinas (CN, CNC, normales)- Robots- Cintas transportadoras, etc.
- Control secuencial establece la repetición del ciclo de control (ON/OFF de los equipos)
Implementación del control secuencial:- Relays que actúan sobre los equipos - Computadores dedicados

2
3
Algebra Booleana
- Variables con valor 0 ó 1- Operaciones: y, o, o exclusivo, y negación- Util para establecer los requerimientos de
encendido ó apagado de los equipos a controlar y los elementos que los controlan (Switches)
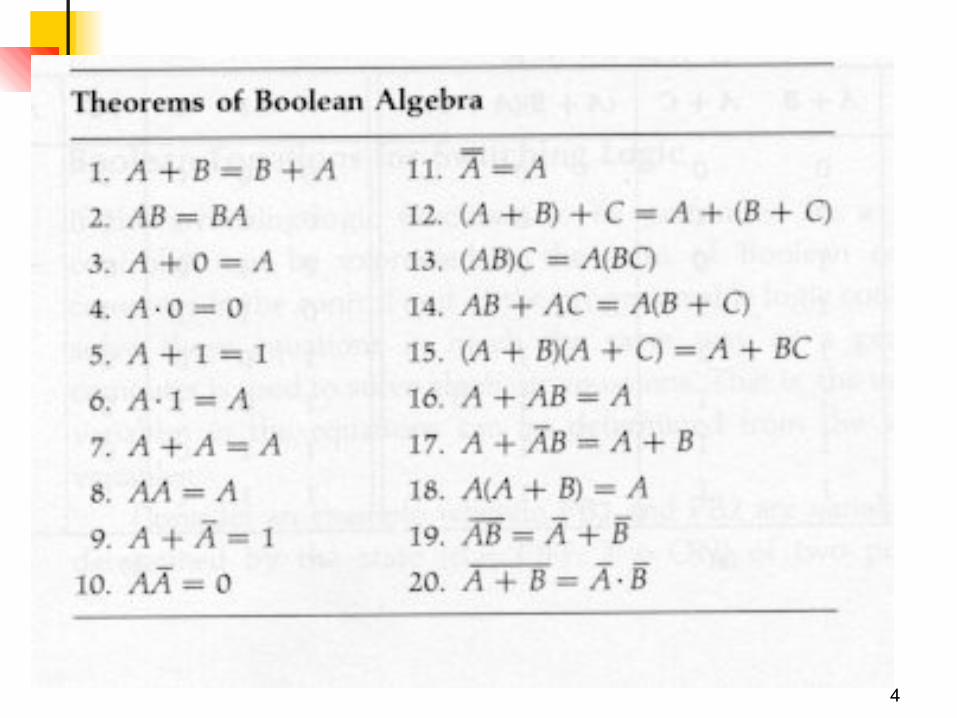
- Teoremas de Algebra Booleana
4

5
Ecuaciones Booleanas para el control de equipos
Sean PB1 y PB2 las variables Booleanas asociadas a dos interruptores (pueden tener valor 0 = desconectado ó1 = conectado). Si una tercera variable AMP se relaciona a PB1 y PB2, su funcionamiento podría representarse porejemplo como:
AMP = PB1 + PB2
que significa ………
Así como AMP = (AMP + PB1)•PB2 significa que …..
6
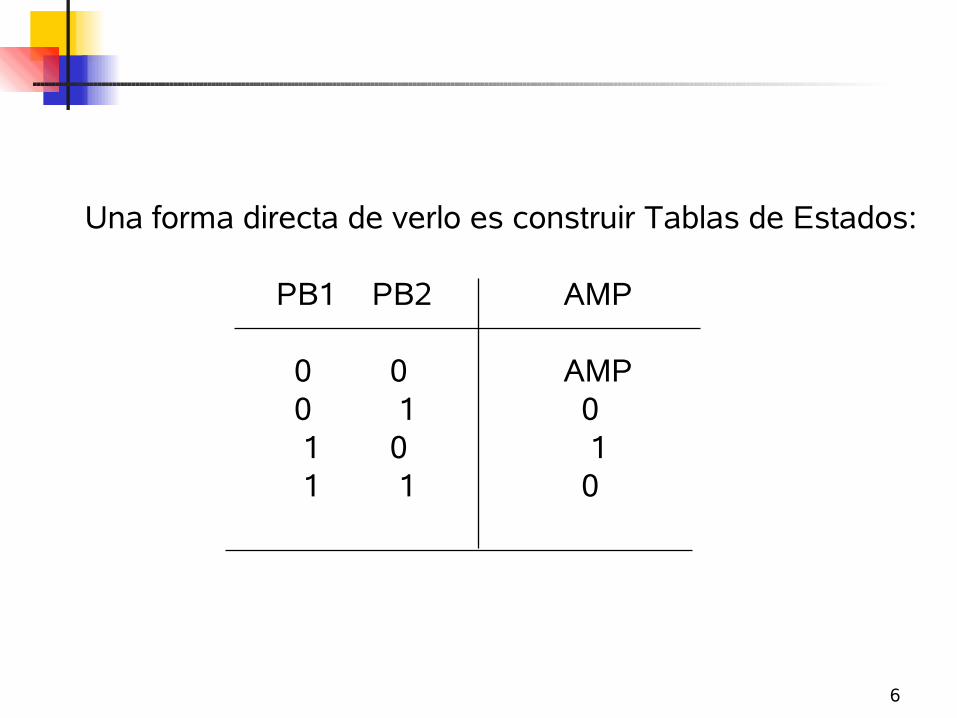
Una forma directa de verlo es construir Tablas de Estados:
PB1 PB2 AMP
0 0 AMP 0 1 0 1 0 1 1 1 0

7
Diagramas de Escalera (Ladder Diagrams)
Componentes del Diagrama de Escalera:
8
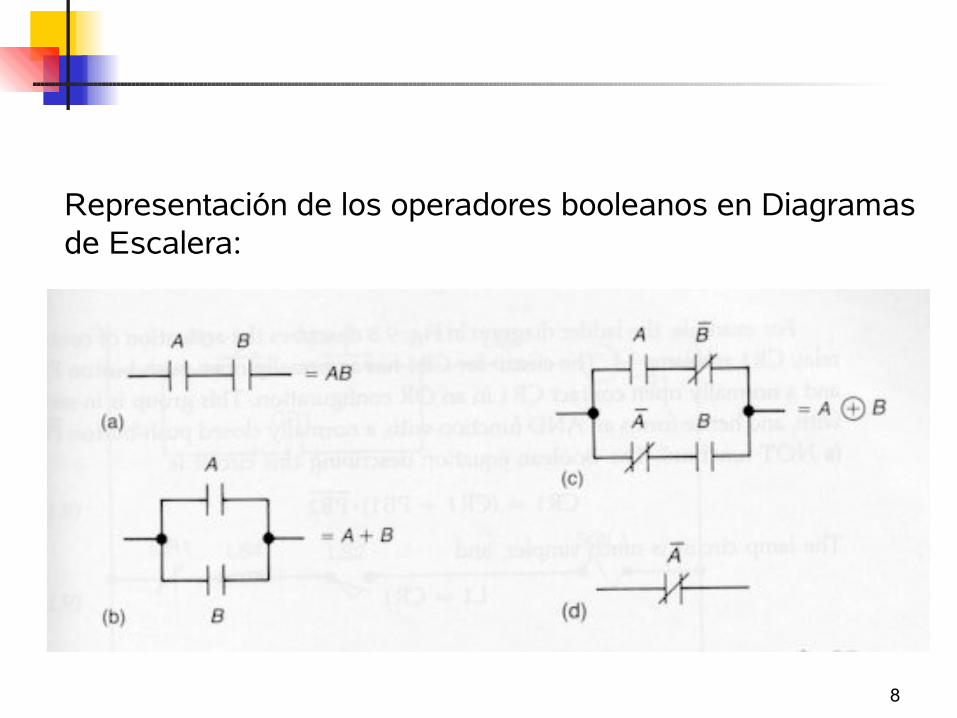
Representación de los operadores booleanos en Diagramasde Escalera:
9
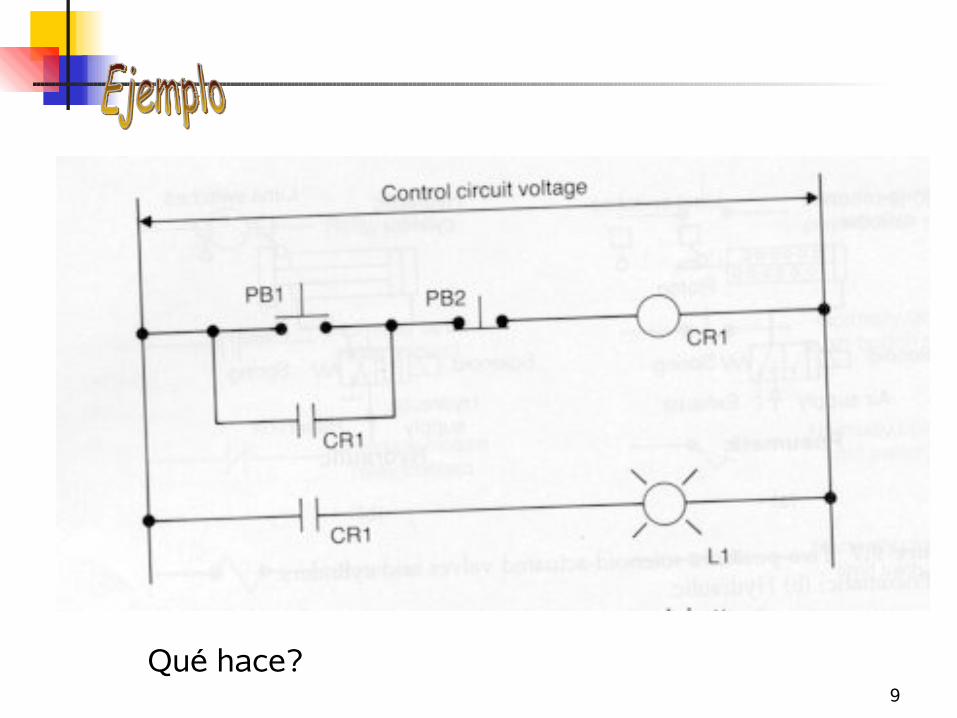
Qué hace?
10
Control del Tiempo en PLC´s
Requerimientos por PAUSAS entre eventos a controlar
Por ejemplo: Permitir una operación de maquinado ó transporte
Se asume que es más eficiente controlar el tiempo que el fin del evento mismo.
Dos implementaciones posibles: TIMERS y COUNTERS
11
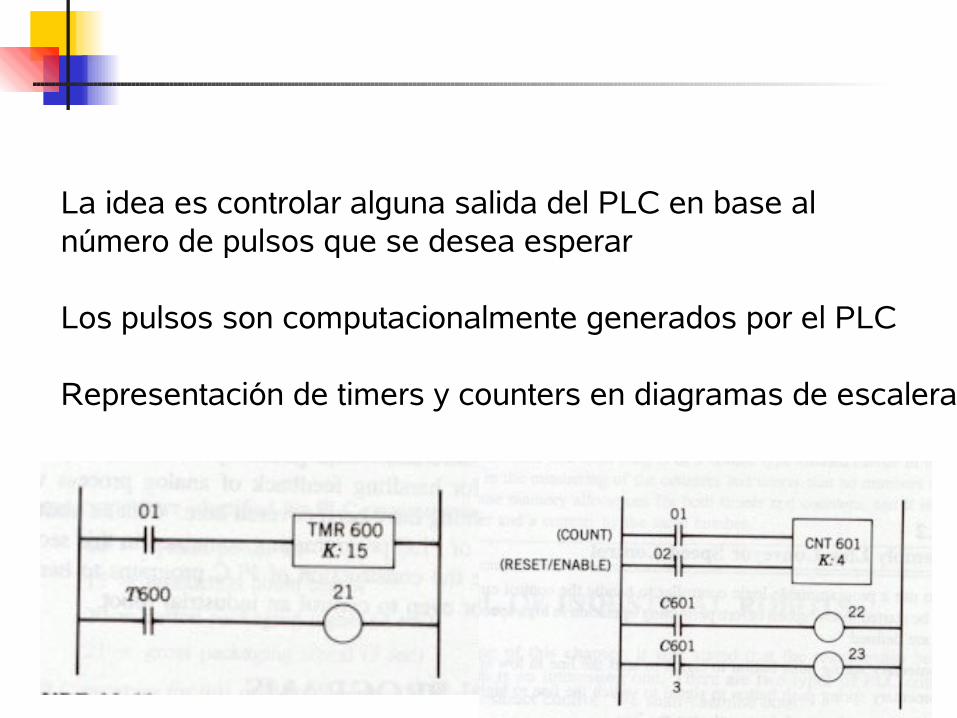
La idea es controlar alguna salida del PLC en base al número de pulsos que se desea esperar
Los pulsos son computacionalmente generados por el PLC
Representación de timers y counters en diagramas de escalera
12
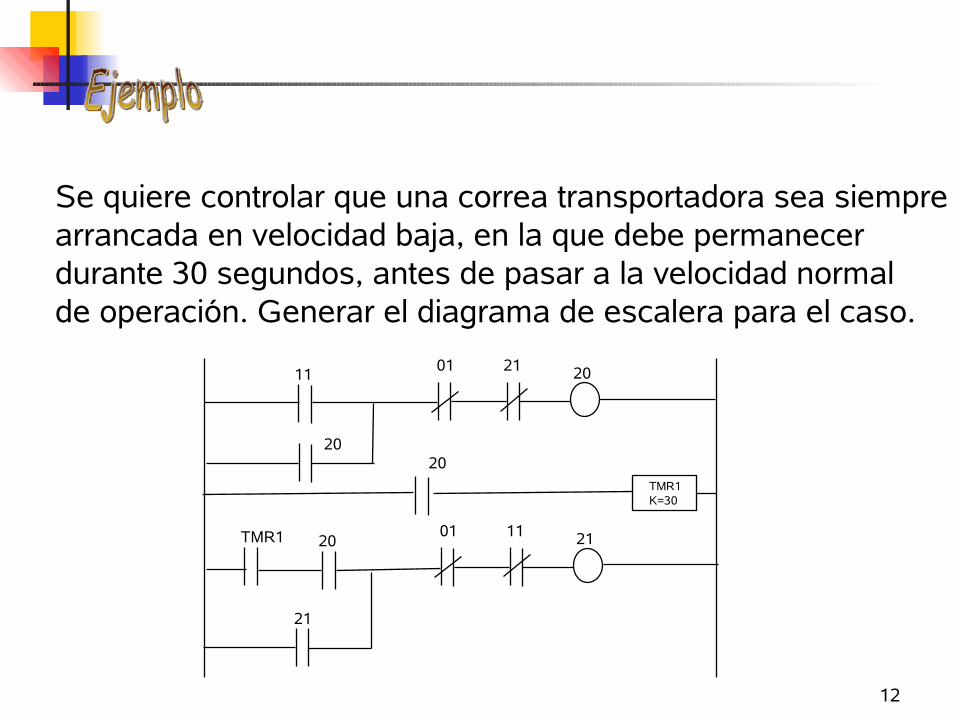
Se quiere controlar que una correa transportadora sea siemprearrancada en velocidad baja, en la que debe permanecer durante 30 segundos, antes de pasar a la velocidad normalde operación. Generar el diagrama de escalera para el caso.
TMR1K=30
20210111
20
211101TMR1 20
21
20

13
Conversión de ecs. Booleanas en diagramas de escalera
- Equivalencia entre ecuación y peldaño de la escalera- Las ecuaciones deben ser de la forma: variable = expresión- La variable a la izquierda de la ecuación representa el equipo siendo controlado- Las variables que componen la expresión representan los elementos controladores (interruptores, relays, etc.)- Se debe convertir primero los elementos entre parentesis- Variables con símbolo de negación representan interruptores normalmente cerrados.

14
Convertir las siguientes ecuaciones:
CR1 = (CR1 + (PB1•PB2)) •LS3
SOL1 = CR1 •LS1 •LS2
donde: CR1 relay SOL1 solenoide PB interruptor pulso LS interruptor contacto

15
Programación de PLC´sEspecificación de los requerimientos de control
1. Tablas de estado (Switching tables)Especificar los estados de encendido/apagado delos distintos equipos involucrados
2. Diagramas de flujoRepresentación de los cambios que puedenocurrir en el sistema a controlar. Especialmenteadecuado para representar decisiones o secuencias alternativas de acción
3. Diagramas de estadoRepresentación de los estados del sistemas. Losestados del sistema están relacionados a valoresdistintos de la variable de salida controlada
16
Ejemplo deun PLC y suinterface de programación

17
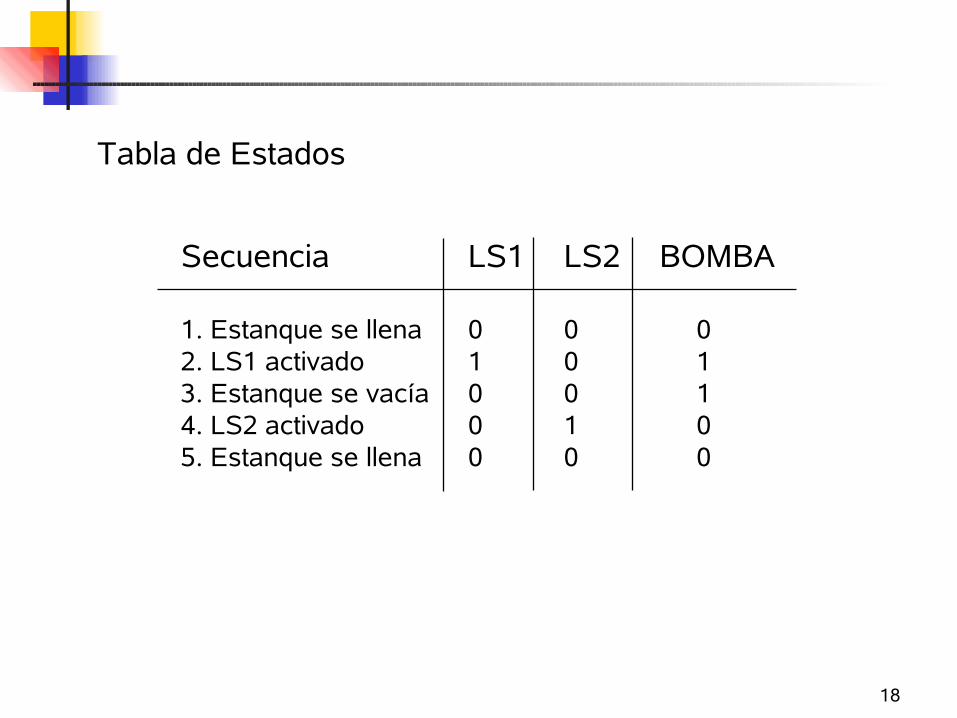
Funcionamiento: La bomba se activa con el interruptor de contacto LS1 y debe dejar de funcionar si el interruptor decontacto LS2 es activado. Agua entra constantemente.
18
Tabla de Estados
Secuencia LS1 LS2 BOMBA
1. Estanque se llena 0 0 02. LS1 activado 1 0 13. Estanque se vacía 0 0 14. LS2 activado 0 1 05. Estanque se llena 0 0 0

19
Diagrama de Flujo
BOMBA=0
LS1=1 ?
BOMBA=1
LS2=1 ?
SI
SI
NO
NO

20
Diagrama de Estado
1 2LS1 LS2
BOMBA=0 BOMBA=1

21

22
Secuencia de operaciones del manipulador:
Movimiento Salida PLC Entrada PLC CondicionesExtender brazo 24 04 01, 07Bajar brazo 23 03 04, 01, 07Cerrar gripper 26 06 03, 01Levantar brazo 22 02 06, 01Recoger brazo 25 05 02, 06, 01Rotar base CSR 20 00 05, 06Extender brazo 24 04 00, 06Bajar brazo 23 03 04, 00, 06Abrir gripper 27 07 03, 00Levantar brazo 22 02 07, 00, 04Recoger brazo 25 05 02, 00, 07Rotar SR 21 01 05, 00, 07

23
Diagrama de escalera

24
Ventajas de los PLC
FLEXIBILIDAD: Reconección de los equipos puede ser realizada rápidamente sin tener que alterar las conecciones, sólo el programa del PLC.
VELOCIDAD DE PUESTA EN MARCHA: Diseño y prueba de la red de conecciones pueden ser realizados en corto tiempo.
CONFIABILIDAD Y MANTENCION: Construcción sin partes móviles (sólo componentes electrónicos).

25
RECOLECCION DE DATOS: En base a los eventosdel sistema. Para propósitos de control (unidades
producidas, rechazadas, etc).
COSTO: En situaciones que involucran sistemas industriales complejos que deben utilizar complejos manejos lógicos de los equipos.
26
Desventajas de los PLC
ERRORES DE PROGRAMACION: Las posibilidadesde incurrir en errores son mayoresque en sistemas de relays.
MAS FACIL EXPERIMENTAR: Al probar mayornúmero de alternativas, existe mayorriesgo y costo.
CONDICIONES ANORMALES: Los efectos de cortes de energía deben ser analizadospara determinar el próximo estadodel sistema (salidas del controlador)