pg-lo-op-0001-2011 posicionamiento de embarcaciones y artefactos navales
DESCRIPTION
POCISIONAMIENTOTRANSCRIPT
I PROCEDIMIENTO PARA EL POSICIONAMIENTO
1 DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP. I
!
PEMEX EXPLORACIÓN Y PRODUCCIÓN
MAYO DE 2011
VERSIÓN: SEGUNDA
HOJA DE AUTORIZACION A
PROPONE:
h DE: 68 \ ) SEGUNDA
PG-LO-OP-0001-2011 MAYO DE 201 1
Ing. R~ÚI'C. ~ o h h l e z Enciso
PAG: 2 V E R S I ~ N
~ e r e n t e de Perforación y Mantto. a Pozos
EXPIORACIOI Y PRODUCCIOI B .
subdirector )ie la CSM. \ \\ Subdirector - ~@RM-SO
I
Puebla Subdirector de Perforación y
Mantenimiento a Pozos
Protección Ambiental.
MANUAL DE PROCEDIMIENTOS DE LOGISTICA / 1) PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACION~Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP.
ELABOR~ GRUPO DE TRABAJO
Director General.
RWS~ ING FEL~~#O\BAU,T.ISTA
El presente procedimiento se emite por función de la Subdirección de la coordinación de Servicios Marinos. Por tal motivo no se requiere de la autorización de algún Cuerpo de Gobierno del SSPA.
En la élaboración de este documento participó el personal que integra el grupo de trabajo siguiente:
Nombre Área de adscripción Firma
IIVG. RAÚL J. DE LA GARZA CASTILLO
ING. FERNANDO LEON CÓRDOVA
ING. ABELARDO VITAL VALENTE
ING. ADALBERTO PELÁEZ AIVGULO
ING. CARLOS RUBEN FAVILA CASTILLO
ING. GONZALO C. GOrVlEZ GOIVZALEZ
ING. ANGEL CID MUNGUIA .
ING. PAULllVO VALADEZ PEREZ
ING. BENITO ORTIZ SÁNCHEZ CEO / AIKMZ
ING. MALIRO MbR1-IIVEZ JIMÉNEZ CEO / AIKMZ
ING. MARCO ANTONIO TORRES RAMIREZ
ING. NORBERTO GUZMÁLI ROSAS GSIPA / RMSO
ING. HERMEIVEGILDO PÉRZ VELÁZQUEZ
ING. RAUL IVlARTlNEZ MARI-INEZ UCG / RMSO
ING. ALFONSO PLU.MA'HERNÁNDEZ CEO / AILT
ING. GUSTAVO PÉREZ BOLON CEO / AIAPCH
ING. VICTOR H. RA~VI~REZ OLARTE COPIE / AILT
ING. SALVADOR RAM~REZ ALMORA CSI PA / AIPRA
LIC. FLORICEL III SOTO RLllZ SUBG.DE SERVICIOS
ING. ANGEL GOrVlEZ GU-l-IERREZ COPIE-A / AIKMZ
LIC. ANTONIO ARTEZAIV HERrVllDA SAPSIGAFM
ING. RICARDO RODRIGWEZ DA SlLVERlA COPIE-B / AIKMZ
PG-LO-OP-oo01-201 1 MAYO DE 201 1
ELABORO GRUPO DE TRABAJO
EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LO GIS TIC^ ,
PROCEDlNllENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y ARVEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Página
2.-ÁNIB ITO DE APLICACION, ALCANCE Y RESPONSABILIDADES .----------------------------------- 5
3.-REVISION Y ACTUALIZACIÓI~ .---------------.------------------------------------------------------------ 12
6.- REQUISITOS DE SEGURIDAD, SALUD EN EL TRABAJO Y PROTECCIÓN AIVIBIEWTAL--22
7. DESCRIPCI~IV DETALLADA DE AC-~IVIDADES .--------------------------------------------------------- 23
. . ' J
1 PG-~04~-0001-2011 1 PAG: 5 \ DE: 68 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
EXPLORACION Y PRODUCCION O 4'-
MANUAL DE PRocEDlMlENTos DE L o G i s - r I c A & ~ ~ PROCEDlNllENTO PARA EL POSlClONAlMlENTO DE EMBARCACIONES Y ARTeOFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
1. OBJETIVO.
Establecer las actividades y disposiciones operativas para el posicionamiento, acercamiento y10 retiro de: Embarcaciones con sistema de posicionarriiento dinámico o de anclas y Artefactos Navales como son (Plataformas Auto Elevables de Perforación, Plataformas semi sumergibles y10 Barcazas), que permitan salvaguardar la integridad de las estructuras fijas, ductos submarinos y Arboles Húmedos (pozos submarinos de producción) de PElVlEX Exploración y Producción que se localizan costa afuera, mediante la utilización de un sistema de posicionamiento global diferencial "DGPS" a bordo.
2. ÁMBITO DE APLICACION, ALCANCE Y RESPONSABILIDADES.
2.1 Ámbito de aplicación:
El presente procedimiento es de observancia general y obligatoria para todo el personal que interviene en las actividades de posicionamiento, acercamiento y10 retiro de: Embarcaciones cone;sistema de posicionamiento dinámico o de anclas y Artefactos Navales como son (Plataformas Auto Elevables de Perforación, Plataformas semi sumergibles y10 Barcazas), en las áreas marinas de influencia.
2.2 Alcance:
El presente documento establece las actividades de seguridad que se deberán de anteponer o programar de manera coordinada para que se justifiquen las disposiciones operativas durante el posicionamiento de Embarcaciones, así como el acercamiento y10 retiro de Artefactos Navales a plataformas fijas.
Ninguna de las disposiciones establecidas en este procedimiento, exime a los involucrados de los daños y10 consecuencias que se deriven por la no-observancia y10 negligencia en el curriplimiento y aplicación de éste procedimiento.
Este procedimiento cancela y sustituye al rocedi di miento para el posicionamiento de Embarcaciones y Artefactos Navales en el.Área Marina de Influencia de PEP" clave PG-LO-OP-001-2008, Versión Primera, Emisión: Febrero de 2008.
2.3 Responsabilidades:
Es responsabilidad de:
2.3.1 Subdirector de la Coordinación de Servicios Marinos.- Coordinar la distribución, control y aplicación del presente procedimiento en PEMEX Exploración y Producción.
2.3.2 Gerente de Logística.- Coordinar la elaboración, revisión, control, distribución y actualización de esteProcedimiento en PEMEX Exploración y Producción, así como verificar su cumplimiento, de manera que se homologuen las diferentes acciones como consecuencia de su aplicación. /
-LO-OP-0001-2011 1 PÁG: 6 I\ DE: 68
2.3.3 Gerencia de Perforación y Mantenimiento a Pozos 1 Coordinación de Control Marino y Posicionamiento de Embarcaciones.- Implantar en su ámbito de competencia este procedimiento, así como establecer los mecanismos necesarios para su control, vigilancia y aplicación.
2.3.4 Supervisor de Contratos, Supervisor de Obra, Ingenierolcapitán Supervisor de Posicionamiento.- Dar cumplimiento al procedimiento.
2-.3.5 supen/isor de Contratos o Supervisor de Obra.- Avisar el inicio o finalización de las maniobras de retiro, acercamiento y posicionamiento de Erribarcaciones y Artefactos IVavales al Superintendente o encargado directo de la plataforma satélite o complejo,,.por radio VHF en el canal 06 ó 12. Obligatoriedad de que el personal involucrado cuente y utilice un medio común como alternativa de comunicación, como radio trunking y10 radio portátil VHF.
2.3.6 Ingeniero Supervisor de Posicionamjentos. / ' /
1. Supervisar las actividades inherentes al posicionamiento de cualquier tipo de Embarcación y10 Artefacto Naval, donde previo al inicio de las maniobras de retiro, acercamiento, posicionamiento '7 dinámico, fondeo o levado de anclas, convoca a una junta de trabajo al personal involucrado en esta actividad, en donde el Capitán y10 Rig Mover presenten la propuesta de las maniobras a realizar para su aprobación o modificación, dejando todo asentado en una minuta la cual firman los involucrados conservando cada uno de ellos una copia, para cualquier aclaración futura al respecto.
2. a) Realizar inspecciones a los sistemas de anclaje de las Erribarcaciones que inician contrato con PEP y posteriormente cada seis meses informa al Supervisor de contrato a bordo, la necesidad de una nueva inspección al sistema de anclaje de la Embarcación. adicionalmente dicho sistema se verifica antes de cada maniobra de fondeo o levado de anclas, ,para garantizar su condición operativa.
b) Realizar visitas aleatorias a las Embarcaciones de posicionamiento dinámico, para supervisar el coriecto funcionamiento de dicho sistema.
3. Evaluar la experiencia y los conocimientos técnicos del personal operador del programa de navegación e involucrados en las maniobras, lo cual lo faculta para solicitar su sustitución en caso de que se muestre falta de capacidad y10 experiencia en el cargo.
4. Verificar que:
a) La compañía contratista que presta el servicio. del sistema de posicionamiento "DGPS", instale en el programa de navegación, la última versión de la base de datos de las instalaciones marinas en las áreas de influencia de PEP. '
b) El operador del programa de navegación verifique que todos los componentes del sistema operen adecuadamente, asegure la correcta recepción de señales de satélites "DGPS", introduzca los parámetros de transformación del esferoide y la zona geográfica correspondiente, verifique que la base de datos de instalaciones marinas corresponda a la Última versión autorizada por PEP.
( \
* . " " . " I
?, - % - \
PG-LO-OP-0001-2011 PÁG: 7 L\ DE: 68 MAYO DE 201 1 VERSION \ SEGUNDA
ELABORÓ
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
c) El operador del programa de navegación entregue en forma impresa y en archivo electrónico toda la información que se genere antes, durante o después de cada maniobra de posicionamiento, fondeo o levado de anclas, incluyendo un plano a escala en hoja tamaño carta, en donde aparecen las instalaciones marinas aledañas al área de maniobras, ubicación de la Embarcación y sus anclas fondeadas o levadas con su respectivo listado de coordenadas geográficas y UTM; este' plano debe contener la fecha, hora, condiciones meteorológicas y nombre de los involucrados en las maniobras de posicionamiento, fondeo o levado, firmado por cada uno de los que intervienen.
d) El Capitán yló Rig Mover efectúe de manera segura todas las operaciones que se realizan en las maniobras de retiro, acercamiento y posicionamiento de Artefactos Navales (Plataformas Auto Elevables de Perforación, plataformas Semisumergibles y10 Barcazas), maniobras de Embarcaciones con sistema de posicionamiento dinámico y maniobras de fondeo ó levado de anclas. Asimismo que todas las anclas de la Embarcación cuenten con sus cables certificados, orinques y boyas de señalamiento en buenas condiciones; las boyas deben estar pintadas de color naranja internacional, amarillo señal o cualquier otro color contrastante con el mar,,dichas boyas deben contar con tiras reflectoras de luz y opcionalmente con reflectores dé radar para que sean perfectamente visibles, con la finalidad de evitar la colisión con otras Embarcaciones que navegan en el área de plataformas marinas, además de indicar claramente el nombre de la Embarcación a la cual pertenecen, nomenclatura correspondiente ,al ancla, para fácil identificación.
e) El Capitán o Rig Mover informe el inicio y finalización de: maniobras de retiro, acercamiento y p, posicionamiento de Artefactos Navales (Plataformas Auto Elevablesde Perforación, plataformas..i.
Semisumergibles y10 Barcazas), maniobras de Embarcaciones con sistema de posicionamiento dinámico, así como maniobras de fondeo y10 levado de anclas, a control y tráfico marítimo vía radio VHF canal 10 o 16.
f) Cuando la maniobra consista en posicionar una plataforma Auto Elevable que tenga que intervenir un pozo en alguna estructura fija (plataforma marina) o retirarla de esta, el Capitán o Rig Mover le proporcione al ingeniero supervisor de posicionamiento y al operador del programa de navegación, un plano con las dimensiones del cantiliver y ubicación de los conductores de la plataforma en la que se posicionará, para que se ingrese la información al programa de navegación y posteriormente se proceda a elaborar un plan de trabajo, en donde se detallen las maniobras y acciones a realizar que garanticen la integridad de las instalaciones marinas.
g) Para efecto del traslado, posicionado ó salida de la plataforma el personal involucrado realice las actividades-inherentes a lo anterior, de acuerdo al manual de operaciones de la plataforma de perforación de que se trate.
Para cualquiera de los casos antes mencionados, se debe levantar una minuta en donde quedén asentados todos los puntos tratados y de ser necesario, anexar los planos correspondientes al proyecto de las maniobras a realizar con respecto a las instalaciones marinas y su ubicación final; la minuta la firman los participantes, conservando cada uno -de ellos una copia para cualquier aclaración futura al respecto.
5. Detener el inicio o continuación de: maniobras de retiro, acercamiento y10 posicionamiento de Artefactos Navales (Plataformas Auto Elevables de Perforación, Plataformas semi sumergibles y10 Barcazawmaniobras de Embarcaciones con sistema de posicionamiento dinámico .así como
PROCEDIIVIIENTO PARA EL POSICIONAIVIIENTO DE EMBARCACIONES Y AR~EFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
maniobras de fondeo ó levado de anclas, cuando alguno de sus componentes no está funcionando correctamente representando un riesgo para la integridad de las instalaciones marinas y personal que labora en ellas, cuando no se cumple con lo mencionado en el punto 2.3.6 numeral 4 inciso d), además de lo que a continuación se indica:
a) Cuando el equipo de navegación, girocompás electro magnético y/ó compás magnético de las Embarcaciones y10 Artefacto Naval presente fallas ó se encuentra fuera de servicio.
b) Cuando la Embarcación no cuenta con sistema de monitoreo, dinamómetros y medidores de distancia de los cables de anclas, los cuales deben estar calibrados y certificados por una tercería autorizada o reconocida por la Administración de la bandera de la Embarcación o el Centro Nacional de Metrología (México).
c) Cuando la longitud de los cables no es suficiente para posicionar la Embarcación en el lugar requerido.
d) Fallas en moto generadores, malacates (winches) o máquinas principales de la Embarcación y10 remolcador (es) de apoyo. f . ,
e) Cuando las anclas utilizadas para mantener fija la posición de la Embarcación y10 Artefacto Naval hayan sido modificadas de su estructura original. . l
1 f) Cuando se presenta un garreo y en su momento se determina que el ancla está en contacto o muy cerca del ducto submarino.
g) Cuando el personal encargado de los malacates (winches) del sistema de anclaje no lleva un registro en el cual se asientan las tensiones de los cables en un lapso no mayor a una hora, asimismo cuando se observan variaciones bruscas de tensión se avisa al Capitán y/ó Rig , I L
Mover responsable de la maniobra de la Embarcación ó Artefacto Naval.
h) Cuando el operador del malacate (winche) no notifica al Capitán responsable de la maniobra de abordo y al Ingeniero Supervisor de posicionamientos, cualquier cambio en la distancia entre
-la Embarcación y el ancla, tomando como base la distancia registrada con el sistema de DGPS.
i) Cuando el sistema de, posicionamiento presenta fallas que lo inhabiliten para proporcionar datos confiables.
j) Cuando el personal de compañía que opera el sistema de posicionamiento muestra no tener experiencia en su operación, desconocimiento del área de plataformas y maniobras de posicionamiento en general.
k) Cuando las condiciones meteorológicas son adversas para el desarrollo de las actividades de posicionamiento.
1) Cuando se requiere y no se cuenta con un segundo remolcador de apoyo o boyas intermedias, para suspender el cable del ancla en los lugares donde existe contacto con ductos sin enterrar.
m) Cuando la información del mapeo de sonar de barrido lateral realizado de la localización, no es reciente (no mayor a 90 días mientras no exista algún otro evento) o no especifica coordenadas, dimensiones, .tipo de Materiales y demás información necesaria para el poficionamiento, de acuerdo a lo existente.
n) Cuando en cercanías de la localización a posicionar una Embarcación o Artefacto Naval, existen líneas submarinas que no se encuentran en la base de datos de Instalaciones Marinas actualizada por PEP.
o) Cuando en cercanías de la localización a posicionar una Embarcación o Artefacto Naval, existe riesgo en las maniobras debido a la cantidad de instalaciones submarinas y que no permite el cumplimiento de lo indicado en el presente procedimiento, como es el caso de los complejos de producción y áreas con válvulas submarinas.
1 -
p) Cuando ocurre un evento inesperado mediante el cual una Embarcación o Artefacto Naval, colisiona contra alguna estructura fija; se suspenden las maniobras para realizar una inspección minuciosa y exhaustiva; con los equipos necesarios que garantizan la integridad a: líneas superficiales, estructura fija, ductos, válvulas y/o arboles de válvulas de pozos en la instalación, llevándola a cabo personal especialista.
MAYO DE 201 1
GRUPO DE TRABAJO
PROCEDlNllENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR?EFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
6. Realizar pruebas operativas a los equipos críticos relacionados con los sistemas de posicionarriiento dinámico y de anclas de las Embarcaciones y/Ó Artefactos Navales antksdé iniciar las maniobras si lo considera necesario.
PG-LO-OP-0001-2011
7. informar por escrito al Capitán y/o Rig Mover, 'Supervisor de contrato, Superintendente, representante de compañía y Supervisor de obra, los motivos por los cuales no se autoriza el inicio o continuación de la maniobras de posicionamiento.
PÁG: 9 1 DE: 68
8.informar por escrito al Superintendente, Capitán y/o Rig Mover la procedencia de inicio o continuación de las maniobras cuando a su criterio queden corregidas las anomalías2,a la que se refiere el punto 5 de este apartado o no representen peligro inminente para las instalaciones marinas.
9.Conjuntamente con el Rig Mover realizan inspecciones a los componentes del sistema de remolque de las Embarcaciones de apoyo, verificando que se encuentren en buenas condiciones, para ejecutar las maniobras de posicionamiento, acercamiento y/o retiro de Artefactos Navales (plataformas Auto Elevables de perforación de zapatas independientes ó Mat) de manera segura.
2.3.7 Subdirectores Regionales y de Sede de PEMEX Exploración y Producción. Coordinar la difusión e implantación en su ámbito de competencia este procedimiento, así como establecer los mecanismos necesarios para su control, distribución, vigilancia y aplicación, de manera que se homologuen las diferentes acciones como consecuencia de su aplicación.
2.3.8 Áreas encargadas de la elaboración de bases de licitación. Incluir las disposiciones y actividades para el posicionamiento, acercamiento y/o retiro de Embarcaciones y Artefactos Navales dirigidas a terceros en este procedimiento, en los anexos técnicos de las bases de licitación.
2.3.9. Activos Integrales de Producción y Regionales de Exploración. Entregar a la Gerencia de Perforación y lblantenimiento de Pozos de la División correspondiente, lo siguiente:
1. Información sobre el tirante de agua y coordenadas del pozo en la próxima localización a
L\ PG-LO-OP-0001-2011
MAYO DE 201 1 ELABORÓ -
GRUPO DE TRABAJO
EXPLORACION Y PRODUCCION O
1 NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP. 1 2. Distribución de conductores ("Domino") en caso de ser una estructui-a. 3. Planos estructurales de la plataforma de PEMEX, donde -entrara el equipo de perforación . marina. 4. Planos de ductos actualizado de un radio mínimo de 1 kilómetro alrededor de la localización,
validado por la GTDH, contando con sus coordenadas tramo a tramo, tomadas con R.O.V. . 5. Estudios Geotécnicos y Geofísicos de la localización.
6. Análisis de Riesgos de la instalación; 7. Notificación 1 Declaración ,de que los pozos fueron exitosamente cerrados, mediante un
escrito entregado a perforación para los casos que le aplique. 8. Mapeo con sonar de barrido lateral de la localización, realizado recientemente (no mayor a
90 días mientras no exista algún otro evento) y10 posterior a la realización de trabajos de construcción en la localización.
9. Análisis de riesgo de áreas'compartidas, considerando las estructuras fijas y la plataforma Auto Elevable.
2.3.1 0. Gerencia de Perforación y Mantenimiento a Pozos. 6 l
1. Notifica a los activos los Movimientos de equipos y entre pozos en produccion de perforación marina del Programa Operativo Anual y sus Anteproyectos Trimestrales. En caso de darse un cambio en el programa; notifica con al menos 20 días de antelación.
2. Información del último equipo que intervino en la localización, fecha de salida, aproamiento y penetración de patas.
3. Gestionar el Mapeo con sonar de barrido lateral de la nueva localización.
4. Realizar e incluir una lista de verificación al sistema de permisos para trabajos con riesgo (Manual del SPPTR) para el caso de movimiento de cantiliver y equipo entre pozos en produccion cuando la plataforma este en su localización en la etapa de interconexiones.
a) Deslizar Cantiliver b) Instalar pasillo guía 1 marrear c) Interconexión'de líneas al cantiliver
5. Verificar que el Proveedor:
a) Elimine durante la precarga el uso de grúas, y las operaciones .de helicópteros deben llevarse a cabo sólo co.n el permiso del OIM.
b). Presente la simulación en Autocad del posicionamiento del Equipo en la localización de acuerdo a los planos de la estructuray Iíneas submarinas, entregados por PEP.
c) Analice la in'formación proporcionada por PEP y que exista un consenso con su compañía aseguradora mediante un documento de aprobación, que valida la factibilidad de entrar a la localización propuesta, elaborando un plan de maniobras
1 1 PG-LO-OP-0001-2011 1 PÁG: 11 \! DE: 68 1 - - ~ ~ ~ ~ ~~
MAYO DE 201 1
PROCEDIMIENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y A R ~ EFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
ll,
VERSIÓN: fi SEGUNDA u /. EXPLORACION Y PRODUCCION O
d) Presente a los activos el Análisis de riesgo del Artefacto Naval yló Embarcación de perforación.
\
e) Solicitar al proveedor copia de la licencia o certificado que acredite al Rig Mover como tal.
MANUAL DE PROCEDIMIENTOS DE LOGISTICA 1 '
f) Garantizar que durante las maniobras de posicionamiento o Retiro, de una Plataforma auto elevable (Zapatas independientes o Mat), esta cuenta con equipos de respiración autónomo, fuente de aire fresco (equipo de cascada), así como alarmas visibles y audibles para detección de presencia de gas
2.3.1 1. Gerencia de Transporte y Distribución de Hidrocarburos Región Marina.
1 .- Mantener actualizada la Base de Datos de Instalaciones IVlarinas.
2.3.1 2. Gerencia de Mantenimiento Integral:
1. Elaborar el Mapeo con sonar debarrido lateral de la nueva localización.
2. Efectuar la limpieza y rastreo del lecho marino en la localización.
3. Realizar el Boyado de ductos y10 dispositivo electrónico que permita conocer la ubicación de las instalaciones submarinas, así como el servicio de buceo para vigilancia de los ductos durante el acercamiento.
4. En caso de requerirse, efectuar la adecuación de la estructura a la entrada y salida de la plataforma.
5. Inspeccionar las zapatas ó mat de la plataforma Auto Elevable con respecto al lecho marino para detectar socavaciones o deslizamientos.
2.3.1 3. Gerencia de Riesgos y Seguros de la Dirección Corporativa de Administración:
En caso de existir discrepancias entre el Arrendador o Proveedor de Servicios y PEP por el cierre de pozos y10 cierre y10 desfogue de líneas submarinas por la entrada y salida de Plataformas Auto Elevables, la citada Gerencia gestionará y coordinará las acciones necesarias a través de las Aseguradoras de ambas partes para solventarlas.
MAYO DE 201 1 ELABORÓ
1 PG-LO-OP-0001-2011 1 PÁG: fiQ 1 DE: 68 1
EXPlORAClON Y PRODUCCION O , #
MANUAL DE PROCEDIMIENTOS DE L O G I S ' T I C ~ PROCEDINIIENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Las sugerencias para la revisión y actualización de este documento, deben ser enviadas a la Subgerencia de Control Costa afuera y Servicios Especializados de la Gerencia de Logística de la Subdirección de la Coordinación de Servicios Marinos, ubicada en Edificio Pemex Planta Baja, calle 5 Sur, manzana "Q"., Puerto Isla del Carmen antes "Laguna Azul", quien realizará la actualización de acuerdo a la procedencia de la misma. Cualquier organización o grupo de trabajo de Pemex Exploración y Producción que sea usuario de este documento, podrá sugerir y recomendar modificaciones y10 actualizaciones del mismo, de acuerdo a lo indicado en el párrafo anterior.
Este documento se revisará y actualizará cada cinco años o antes si las sugerencias o recomendaciones de cambio lo justifican.
4. MARCO NORMA'TIVO R i .
Procedimiento para Elaborar y Actualizar Procedimientos e instructivos de trabajo: PG-NO-OP- 001 -201 0. Versión: Quinta. Emisión: Junio 2010.
Reglamento de Inspección de Seguridad IVlaritima. DVN.RG.026
' 0 . Reglamento de Seguridad e Higiene de Petróleos ~ex icanos y Organismos subsidiarios. RE.SN.0 1
Ley de Navegación y Comercio Marítimos. DVN.LY.098
Procedimiento pata mover Plataforma Auto Elevable a estructura con pozos en producción (CLAVE: 223-21 100-OP-211-0268.), de Enero 2005.
Código MODU (Code for the Construction and Equipment of Mobile Offshore Drilling Units).- Código para la construcción y el equipo de Unidades Móviles de Peiforación Mar adentro.
Procedimiento para realizar Análisis de Riesgo de proceso en Pemex Exploración y Producción CLAVE: PG-SS-TC-003-2007
SOLAS.- Convenio Internacional para la Seguridad de la Vida Humana en el Mar, 1974, y su Protocolo de 1988, enmiendas y resoluciones vigentes.
MARP0L.- Convenio Internacional para prevenir la Contaminación con los Buques, 1973, modificado por el Protocolo de 1978, enmienda s.^ resoluciones vigentes.
Guía para la .presentación del estudio de riesgo ambiental Nivel 2 ANALISIS DE RIESGO SEMARNAT
lnstr ivo para realizar análisis de seguridad en el trabajo, clave IG-SS-TC-002-2008.
$9. &,%
-- PG-LO-OP-0001-2011 1 PAG: 13 1 DE: 68
~ NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP.
Procedimiento para la entrega y recepción de las instalaciones marinas de producción a la unidad de perforación y mantenimiento de pozos, clave PG-LO-OP-002-2009.
5.- DEFINICIONES
Acoderar:
Activo:
Ancla:
Análisis de riesgo de. la instalación:
AIE:
Apique:
Aproar:
Arganeo:
Artefacto Naval:
Dar una codera a la cadena del ancla o a un objeto en tierra o a flote, a fin de aguantar el buque en una forma determinada
Integral de Producción ó Activo Integral de Exploración. Gerencia encargada del desarrollo o exploración de los campos de hidrocarburos y su respectiva explotación o incorporación a las reservas probadas.
Accesorio de hierro, con ganchos de diferente peso que al dejarse caer desde cualquier Embarcación por su propio peso se entierra.$sirven para asegurar la posición de Embarcaciones de diferentes tipos.
Conjunto de técnicas que consisten en la identificación, análisis y evaluación sistemática de la probabilidad de la ocurrencia .de daños asociados a los factores externos (Fenómenos naturales y sociales), fallas en los sistemas de control, los sistemas mecánicos, factores humanos y fallas en los sistemas de administración, con la finalidad de controlar y10 minimizar las consecuencias en los empleados, el medio ambiente, la producción y10 las instalaciones (equipo y maquinaria), (CLAVE: PG-SS-TC-003-2007).
Auto Elevable (Jack Up), Artefacto Naval ó Equipo marino de perforación con piernas utilizadas como soporte de un casco móvil, utilizado para posicionarse fijo en diversos tirantes de agÚa, con un colchón de aire adecuado. Existen con soporte MAT o de patas independientes, con el piso de perforación en Cantiliver o Slot.
Voz que se usa para decir cuando un ancla se encuentra suspendida, tocando el fondo lista para terminar de virarla.
Dirigir la proa de la Embarcación hacia un rumbo establecido.
Aro o argolla de hierro forjado que va engastado en la extremidad de la caña del ancla y de tamaño proporcionado a la misma, sirve para fijar la cadena, cable o cabo.
Es cualquier estructura fija o flotante, que sin haber sido diseñada y construida para navegar, sea susceptible de ser desplazada sobre el agua por si misma o por otra Embarcación, o bien construida sobre el agua, para el cumplimiento de sus fines operativos.

NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP. . .
AST: Análisis de Seguridad en el Trabajo; Es el proceso de analizar, planear y documentar por escrito y en forma detallada, completa y minuciosa la secuencia, paso a paso, de todas las actividades de un trabajo, representando una herramienta básica para realizar la planeación por SSPA de cualquier actividad o tarea que se realice en cualquier momento en el centro de trabajo.
Babor: Lado izquierdo de una Embarcación, encontrándose el observador sobre la línea imaginaria que divide longitudinalmente la Embarcación por la mitad, mirando hacia la proa.
Base de Datos de Censo de plataformas, tuberías, válvulas, interconexiones..y pozos Instalaciones Marinas: submarinos de la Zona Marina de influencia , la cual es Administrada,
actualizada y distribuida por la Gerencia de Transporte y ~iktribución de Hidrocarburos, manipulada normalmente en archivo electrónico de formato "DWG".
Bita:
Boya:
Boyado:
Poste o par de postes fijos sobre la cubierta de una Embarcación o del muelle de una estructura fija que sirven para amarrar los cabos.
Cuerpo flotante que sirve para señalar la ubicación de alguna instalación submarina o la localización donde seaencuentra fondeada el ancla, pudiendo tener una perforación que cruzb todo su cuerpo para permitir el libre paso del orinque de un ancla.
Colocación de elementos flotantes (boyas), usadas para indicar la presencia de líneas submarinas. La boya se amarra a la línea tendida sobre el lecho marino y la boya queda visible flotando en la superficie del mar. Sin embargo, el señalamiento puede variar en gran medida, debido al tamaño de la boya, las condiciones meteorológicas y el tirante del agua de la localización.
Boyas intermedias: Boya utilizada para suspender el cable de un ancla y evitar que tenga contacto con un ducto submarino durante las maniobras de fondeo o levado.
¡ Cabo: Cuerda gruesa de hilos torcidos, utilizada generalmente para el amarre de las ,Embarcaciones.
Caña: Parte del ancla comprendida de la cruz al arganeo.
Capitán: r\ De acuerdo a la Ley de IYavegación el Capitán sera a bordo la primera autoridad. Toda persona a bordo estará bajo su mando y en aguas ! %f.? !+ ,+
I
EXPldRACldN Y PRdDUCCldN O . . MANUAL DE PROCEDlMlEN
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
extranjeras y en alta mar será considerado representante de las autoridades lblexicanas y del propietario o naviero, debiendo tener la capacidad legal y técnica para ejercer el mando de las Embarcaciones o Artefactos Navales y será responsable de estas, de su tripulación, pasajeros, cargamento y de los actos jurídicos que realice, aun cuando no se encuentre a bordo.
Carga Variable: Es la capacidad de almacenamiento en peso y espacio del equipo, y su disponibilidad depende del estado del equipo (operación, tormenta, Navegación). El mantener la carga variable dentro de los límites permitidos asegura la estabilidad del equipo.
Cobrar:
Contratista:
Control Marino:
Halar de un cabo o cable para recogerlo.
Compañía especializada en la ejecución de obras. ." L
Dependencia de la Coordinación de Control Marino y. Posicionamiento de Embarcaciones' que se ubica en Ciudad del Carmen Campeche, realiza la función de facilitar la fluidez del trafico marítimo, apoyo para casos de contingencias y evitar cualquier tipo de. riesgos a toda Embarcación que transita en el área de plataformas de la Sonda de Campeche.
Cubierta: Cada uno de los niveles en que este dividida la Embarcación en sentido horizontal y que van soportadas por los baos; se clasifican segun la posición que ocupan
Chaser: Gancho de acero forjado;que va fijo al extremo de un orinque, se utiliza para recuperar el ancla de una Embarcación, cuando esta no cuenta con orinque o boya de señalamiento.
Derrota: Navegación que debe hacerse y la que en efecto se hace para ir de un punto a otro teniendo para ello que seguir uno o varios rumbos.
Dinamómetro: Instrumento utilizado para medir la fuerza.
DP: Abreviatura en Ingles de Dinamic Position (Posicionamiento Dinámico).
Efectividad:
Eficiencia:
Combinación de la capacidad de producir efecto .y obtener la mejor relación costo - beneficio.
Capacidad para desempeñar un proceso encaminado a un efecto destinado, logrando la mejor relación costo - beneficio.
Eficacia: Capacidad para obrar o para producir el efecto deseado.
$ba;aci& , + Toda construcción diseñada para navegar sobre 0 bajo vías navegables.
1 PG-LO-OP-0001-2011 1 PÁG: 16 1 i DE: 68
EXPLORLICION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGIS'TICA u
PROCEDlRlllENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Enfilar:
Equipo de Perforación:
.Eslora:
Estribor:
Estrobo:
tEstructura Marina Fija:
Estudio Geofisico:
Estudio Geotecnico:
Fondear:
Garrear:
Girocompás electromagnético:
Poner la proa a un punto determinado, manteniendo el rumbo.
Es el conjunto de elementos como torre o el mástil, malacates, poleas, corona y demás equipo superficial, que interactúan en unidad para las operaciones de perforación o reparación de pozos.
Longitud total de una Embarcación de proa a popa.
Lado derecho de una Embarcación, encontrándose el observador sobre la línea imaginaria que divide longitudinalmente la Embarcación por la mitad, mirando hacia la proa.
Cable de acero con gasa en sus extremos, que se usa parasubir o bajar equipos y Materiales: boyas, pasteca, etc. t .
Instalación costa afuera piloteada en el lecho marino, las estructuras son de varios tipos: trípodes, tetrápodos, octápodos, etc.
Identifica la existencia de riesgos potenciales sobre el lecho marino y en el subsuelo, irriprescindible para el posicionamiento de equipos semisumergibles.
Análisis de los estratos del suelo a 130 metros de penetración a partir del lecho marino de manera continua, se efectúan 4 puntos de muestra en la localización, distanciados entre sí de 3 a 5 metros. Esta información es utilizada para calcular la penetración de los pilotes de la estructura o para la penetración de las patas de un equipo de pe'rforación Auto Elevable de patas independientes.
Dejar caer el ancla para que el buque quede posicionado.
Es la acción presentada por el ancla al arrastrarse sobre el lecho marino, derivada de fuerzas externas.
Este dispositivo, dotado de uno o más giróscopos, se emplea para la navegación de todos los buques de cierto tamaño. El girocompás, que no resulta afectado por el magn'etismo terrestre, consiste en un giróscopo cuyo rotor gira alrededor de un eje confinado al plano horizontal de forma que dicho eje se alinea con la línea Norte-Sur paralela al eje de rotación terrestre, con lo que indica el norte verdadero, sin estar sometido a los errores inherentes de desviación y declinación que afectan a la brújula magnética.
Gerencia de Logística de la Subdirección de la Coordinacion de Servicios Marinos.
1 PG-LO-OP-0001-2011 1 PAG: 17 R DE: 68
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
GMI:
GPMP DM:
Gerencia de Mantenimiento Integral de la Subdirección de la Coordinación de Servicios Marinos. Gerencia de Perforación y Mantenimiento de Pozos, División Marina.
G'TDH: Gerencia de Transportación y Distribución de Hidrocarburos.
Grillete: Arco de acero con un ojo en cada uno de sus extremos por los cuales entra un pasador que se sujeta con una chaveta, sirve para unir dos tramos de cable, cadenas, orinque, etc.
Ingeniero Supervisor de Personal Profesionista adscrito a la Gerencia de logística, encargado de Posicionamiento : supervisar las maniobras de posicionamiento de las Embarcaciones o
Artefacto Navales que laboran con anclas en la Zona "Marina de influencia, así como supervisar las maniobras de posi60namiento, acercamiento o retiro de Plataformas móviles de ~erforacioni %
Izar: Hacer subir algo.
Kip: Unidad de medida de peso equivalente a 453.59 kilogramos.
Lascar: Acción de aflojar un cabo o cable.
Levar: Acción de virar la cadena o cable del ancla para desprender esta del lecho marino.
Limpieza del lecho Extracción ó remoción de basura, chatarra, desechos, etc. del lecho marino: marino, por medios físicos ó mecánicos.
Línea de Carga Máxima: Marca colocada en un costado de una Embarcación o Artefacto Naval, que indica la máxima profundidad a la que puede cargarse o lastrarse, dicha línea se coloca de acuerdo al Convenio de líneas de carga.
Malacate o winche: Máquina con uno o varios tambores sobre los cuales se enrolla un cabo, cable o cadena para jalar, bajar o levantar objetos pesados (anclas, tubería, etc.).
Manga: Ancho de una Embarcación medido de babor a estribor.
Mapeo con sonar de Estudio de la superíicie del lecho marino donde se observa lo barrido lateral: accidentado del subsuelo somero, suelo firme y del fango existente, para
detectar la presencia de basura de cualquier tipo, Iíneas submarinas expuestas, válvulas, protecciones, etc.
Mapeo con rastreo del Estudio realizado por personal de buceo, en el que recorren la superficie lecho m a r p ~ : del lecho marino, buscando basura de cualquier tipo, líneas submarinas
expuestas y enterradas, válvulas, protecciones, etc.
Marejada: Agitación del mar por el viento que genera olas.
EXPLORACION Y PRODUCCION O
Medidores de distancia:
Operador del Programa de Navegación:
MANUAL DE PROCEDIMIENTOS DE LOGISTICBI/ - / / ' PROCEDINIIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
, r
Orinque:
PÁG: 18 1i] DE: 68 VERSIÓN \\ SEGUNDA
/~#yisó ' ING @LIPE\+N BAUTISTA
Pasteca:
Permisos para trabajos con Riesgo:
Pendura (a la):
Plan de rolado o levado de anclas:
Instrumento electrónico o mecánico con el que se mide la longitud del cablede un malacate (winche).
Personal encargado de manipular y operar los equipos de posicionamiento DGPS y programa de navegación que se utilizan para determinar en tiempo real, la posición de la ~mbarcación' o Artefacto Naval y remolcadores que participan en las maniobras.
Cadena o cable de acero que une el ancla con la boya de señalamiento, su longitud deberá estar en función del tirante de agua en donde se pretenda fondear el ancla.
Polea abierta por uno de sus lados que sirve para pasar: el cable del ancla de una Embarcación, comúnmente se utiliza como apoyo para recuperar un ancla que no cuenta con su respectiva, boya de señalamiento.
Documento oficial utilizado en el control de los riesgos que han sido identificados para la ejecución de un trabajo.
Expresión que significa que un ancla se encuentra a plomo sin tocar fondo.
Documento mediante'el cual el Capitán de la Embarcación o Artefacto Naval, presenta su procedimiento para llevar a cabo las maniobras de fondeo o levado de anclas en determinada localización, con sus respectivos gráficos indicando las posiciones sugeridas de las anclas, trayectoria de cables, boyas intermedias, posiciones temporales y posición final de la Embarcación o Artefacto IVaval.
Plataforma de Una .combinación auto contenida de equipo de perforación y barcaza Perforación tipo Mat: ,flotante, adaptada cón patas de soporte que pueden levantarse o
bajarse'al rriismo tiempo llevando una zapata compartida entre las patas.
Plataforma de Es la combinación autocóntenida de equipo de perforación y barcaza Perforación tipo zapatas flotante, adaptada con patas de soporte que pueden levantarse o independientes: bajarse independientemente entre ellas.
Plataforma Sémi Artefacto Naval utilizado comúnmente en la zona marina de influencia , Sumergible:
C\ como hoteles flotantes o para perforar en aguas no someras, contando la mayoría con sistema de posicionamiento con anclas y en menor cantidad
con sistema de posicionamiento dinámico o con ambos sistemas.
Periferia del paso: Es la circunferencia alrededor del paso de las zapatas o MAT durante la trayectoria de acercamiento o retiro, establecida por el Grupo Multidisciplinario para determinar la necesidad de boyado de los ductos submarinos.
DE: 68 SEGUNDA
PG-LO-OP-0001-2011 MAYO DE 201 1
Popa: Parte trasera del casco de una Embarcación.
PÁG: 19 1\ VERSIÓN: \
Posicionamiento de Departamento encargado de coordinar y asignar los servicios de ~m barcaciones: supervisión para el posicionamiento de las Embarcaciones o brtefactos
Navales que lo requieran, en las áreas marinas de influencia , con la finalidad de salvaguardar la integridad de las instalaciones marinas y el entorno ecológico. Ubicada en la Terminal Marítima del puerto de Ciudad del Carmen, Camp. Micro: 2-80-88. { í
Posicionamiento de un ~eterminar en tiempo real con el apoyo de un sistema global de ancla: posicionamiento diferencial (DGPS), la ubicación de un ancla al ser
fondeada o levada.
A ING. F E ~ O N BAUTISTA
ELABORÓ
Posicionamiento Sistema utilizado por Embarcaciones para mantenerse en una misma Dinámico: posición, sin necesidad de utilizar anclas, dicho sistema puede ser con
equipo de categoría 1, 2 o 3.
EXPLORACION Y PRODUCCION O
Pozo submarino de Son aquellos pozos en los cuales su árbol de válvulas está instalado a producción (pozo nivel del lecho marino, con una altura aproximada de 5 metros. húmedo):
GRUPO DE TRABAJO
MANUAL DE PROCEDIMIENTOS DE LOGISTICA
Proa: Parte delantera del casco de una Embarcación.
(//lw
Precarga:
PROCEDIMIENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y A~TEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Consiste en cargar con lastre el casco de la Plataforma Auto elevable de zapatas independientes, excediendo la carga variable máxima de operación, con el propósito de asegurar que cada zapata alcance su máxima penetración y evitar cualquier asentamiento cuando el casco es elevado a su colchón de aire final o de trabajo.
Primer Oficial: De acuerdo a lz Ley de Navegación, el Primer Oficial, en ausencia del Capitán será responsable de la operación y navegabilidad de la Embarcación o el Artefacto Naval.
Procedimiento: Documento normativo que incluye un conjunto de operaciones ordenadas en secuencia cronológica para precisar la forma sistemática de hacer un trabajo.
Prueba de aislamiento: Medición del aislamiento del embobinado de los motores eléctrico's.
' i + ..
Remolcador:
PG-LO-OP-0001-2011 MAYO DE 201 1
Barco de gran potencia en sus maquinas y maniobrabilidad, utilizado para remolcar, fondear y levar anclas y10 asistir a las Embarcaciones o Artefactos Navales.
PÁG: 20 DE: 68 VERSIÓN ( h SEGUNDA
Reposicionamiento de Cambiar un ancla de su posición original con las respectivas maniobras ancla: de levado y posterior fondeo en una nueva localización.
Representante de Representante. Técnico del Proveedor del servicio o Contratista de obra Compañia: ante PEP.
EXPlORRClON Y PRODUCCION O -? 6
Rolado de un ancla: . Maniobras en las que un remolcador recibe el ancla de una Embarcación mayor, hace tránsito en dirección y distancia previamente establecida, para dejarla caer libremente al lecho marino.
ELABORÓ &visó GRUPO DE TRABAJO - . p .
Rig Mover:
MANUAL DE PROCEDIMIENTOS DE LOGISTICAY I U PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y A~~TEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP.
Proveedor: Compañia que presta el servi;io de arrendamiento de platafirmas y Equipos de Perforación.
R.O.V.:
Rumbo:
Especialista marítimo certificado por firma internacional para responsabilizarse y dirigir las maniobras durante los movimientos de plataformas Auto Elevables.
Vehículo no tripulado Operado a control remoto (Remote Operated Vehicle).
Dirección de la ~mbarc'ación, considerada en el plano del horizonte.
Ruta de navegación: (Ver Derrota); Durante las maniobras de traslado de los equipos móviles de perforación, dícese de la mejor opción para navegar hasta la siguiente localización, tomando como criterio principal cruzar la menor cantidad de ductos submarinos y no interferir el tráfico marítimo en el área de plataformas.
SIPA:
Sonar de sector programa ble:
Seguridad Industrial y Protección Ambiental.
Equipo de tipo radar para realizar el barrido del área donde pretende posicionar un Artefacto Naval en el cual se observa lo accidentado de la superficie del lecho marino, huellas de Plataformas N E , chatarra, líneas submarinas expuestas, se utiliza a una distancia promedio de 50 a 100 mts. de una Estructura Marina Fija o nuevas localizaciones.
PG-LO-OP-0001-2011 PÁG: 21 \ DE: 68 1 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
EXPLORACION Y PRODUCCION O , . ,a, MANUAL DE PROCEDIMIENTOS DE L O G ~ S T I C A ~
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR*TEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Protección Ambiental.
Supervisor de Contratos Personal Profesionista de Pemex Exploración y Producción, responsable o Supervisor de Obra : de supervisar la actividades inherentes al contrato que tenga pactada la
Subsidiaria con algún proveedor de servicios o Contratista de Obra.
Tubo Conductor: Es la tubería y las conexiones especiales empleadas en los equipos flotantes de perforación para establecer un sello entre la parte superior del pozo que se encuentra en el lecho marino y el equipo de perforación localizado por encima .de la superficie del agua. Un tubo conductor sirve como guía para la sarta de perforación desde el equipo hasta la cabeza del pozo y como conductor del fluido de perforación del pozo al equipo.
' El tubo conductor está formado de varias secciones de tubería e incluye dispositivos especiales para compensar cualquier movimiento del equipo de perforación causado por las olas.
UPMP: ,Unidad de Perforación y Mantenimiento de 'Pozos (Subdirección)::
Trayectoria de Distancia a recorrer por la plataforma Auto Elevable desde --el punto acercamiento: donde bajan las zapatas o Mat al lecho marino, hasta su posición final.
Trayectoria de retiro: Distancia a recorrer por la plataforma Auto Elevable desde la localización de trabajo, hasta el punto determinado por el AST, para retraer sus piernas o Mat a la posición de navegación.
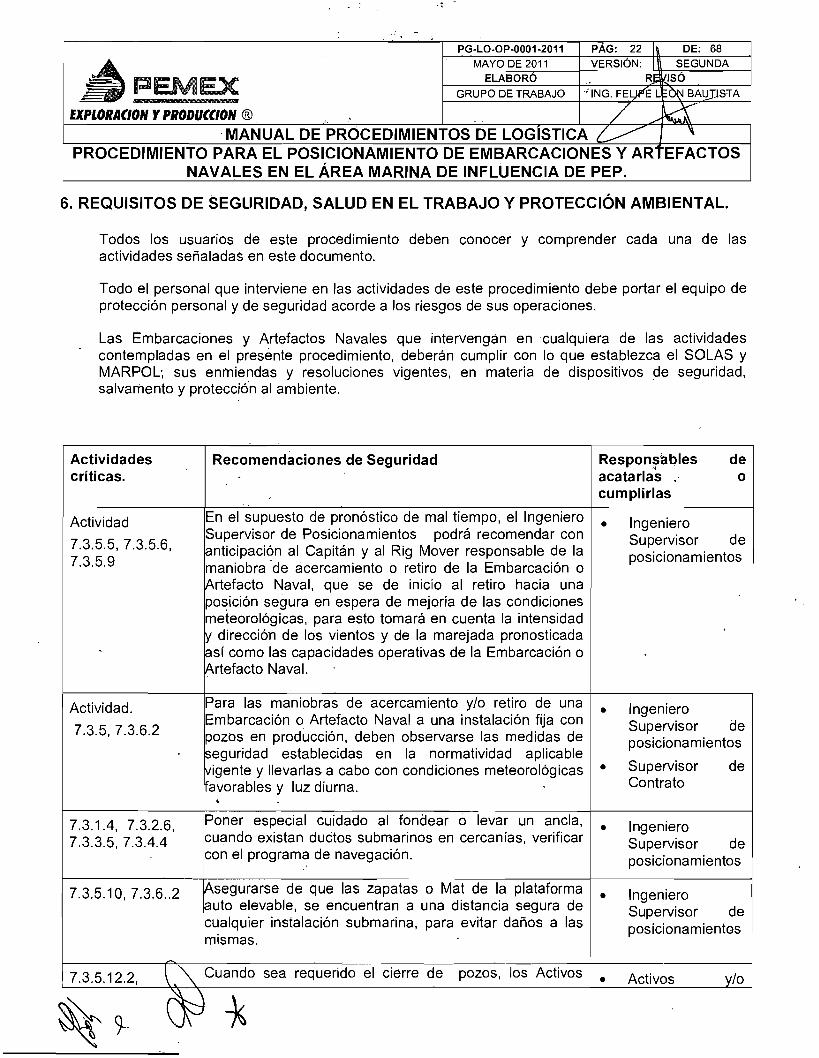
6. REQUISITOS DE SEGURIDAD, SALLID EN EL TRABAJO Y PROTECCIÓN AMBIENTAL.
EXPLORAQON Y PRODUCCION O
Todos los usuarios de este procedimiento deben conocer y comprender cada una de las actividades señaladas en este documento.
PG-LO-OP-0001-2011 PÁG: 22 \ DE: 68 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
Todo el personal que interviene en las actividades de este procedimiento debe portar el equipo de protección personal y de seguridad acorde a los riesgos de sus operaciones.
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA V
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Las Embarcaciones y Artefactos Navales que intervengan en cualquiera de las actividades contempladas en el presente procedimiento, deberán cumplir con lo que establezca el SOLAS y MARPOL; sus enmiendas y resoluciones vigentes, en materia de dispositivos de seguridad, salvamento y protecció'n al ambiente.
Actividades críticas.
Recomendaciones de Seguridad Responsiibles de acatar& .- O
cumplirlas
Activida
7.3.5.5, 7.3.5.9
Ingeniero Supervisor de posicionamientos
d
7.3.5.6,
Actividad.
7.3.5, 7.3
En el supuesto de pronóstico de mal tiempo, el Ingeniero Supervisor de Posicionamientos podrá recomendar con anticipación al Capitán y al Rig Mover responsable de la maniobra 'de acercamiento o retiro de la Embarcación o Artefacto Naval, que se de inicio al retiro hacia una posición segura en espera de mejoría de las condiciones meteorológicas, para esto tomará en cuenta la intensidad y dirección de los vientos y de la marejada pronosticada así como las capacidades operativas de la Embarcación o Artefacto Naval. .
de acercamiento y10 retiro de una Naval a una instalación fija con
.6.2 observarse las medidas de la normatividad aplicable
igente y llevarlas a cabo con condiciones meteorológicas
lngeniero Supervisor de posicionamientos
Supervisor de Contrato
con el programa de navegación.
7.3.1.4, 7.3.2.6, 7.3.3.5, 7.3.4.4
lngeniero Supervisor de posicionamientos
Poner especial cuidado al fondear o levar un ancla, cuando existan ductos submarinos en cercanías, verificar
- l I
7.3.5.1 2.2, . \ l~uando sea requeridoelcierre de pozos. los Activos Activos Y/O
7.3.5.1 0, 7.3.6..2 segurarse de que las yapatas o Mat de la plataforma uto elevable, se encuentran a una distancia segura de
cualquier instalación submarina, para evitar daños a las mismas. t Supervisor de
posicionamientos
PG-LO-OP-0001-2011 1 PAG: 23 1 \) DE: 68 ' MAYO DE 201 1 1 VERSI~N: 1 \\ SEGUNDA
1 EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOG~STICA ¿17
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Actividades críticas.
Responsables de acatarlas o cumplirlas
Recomendaciones de Seguridad
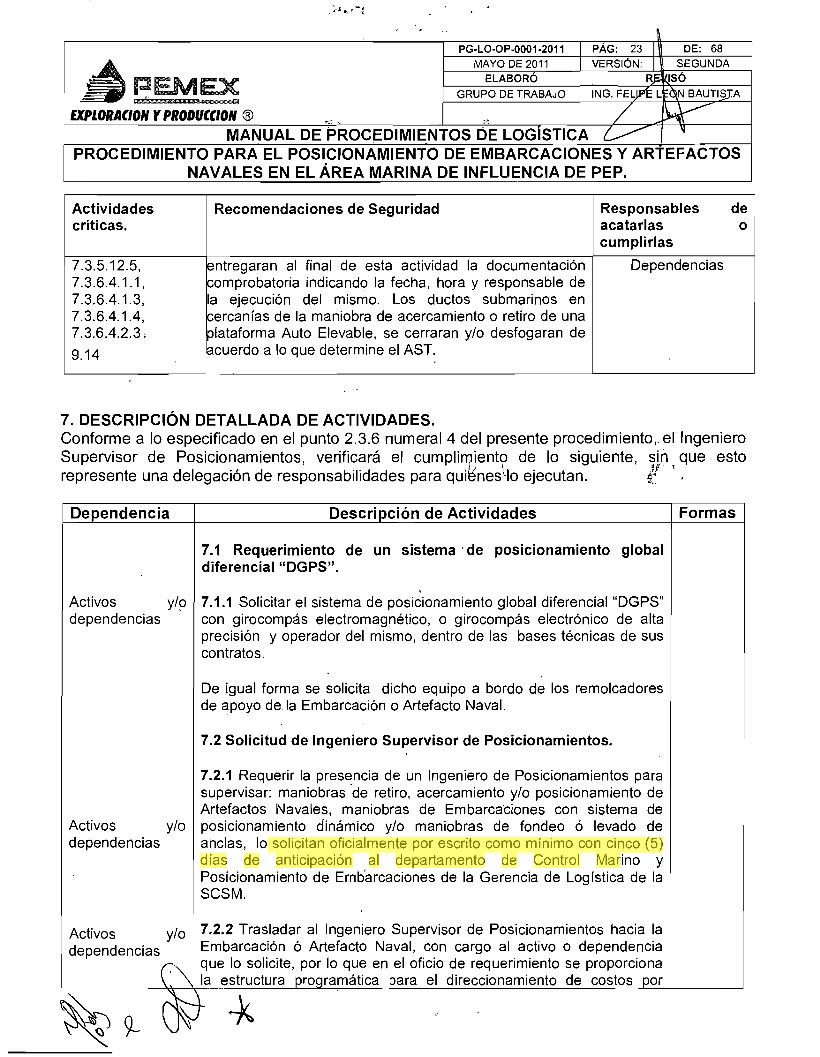
7.3.5.1 2.5, 7.3.6.4.1 . l , 7.3.6.4.1.3, 7.3.6.4.1.4, 7.3.6.4.2.3 ;
9.14
Dependencias 1
entregaran al final de esta actividad la documentación comprobatoria indicando la fecha, hora y responsable de la ejecución del mismo. Los ductos submarinos en cercanías de la maniobra de acercamiento o retiro de una plataforma Auto Elevable, se cerraran y10 desfogaran de acuerdo a lo que determine el AST.
7. DESCRIPCIÓN DETALLADA DE AC'TIVIDADES. Conforme a lo especificado en el punto 2.3.6 numeral 4 del presente procedimiento, el Ingeniero Supervisor de Posicionamientos, verificará el cumplimient~ de lo siguiente, sin que esto represente una delegación de responsabilidades para quiknes'lo ejecutan. $7
l '^ , 4.
Activos YIP dependencias
Dependencia
7.1 Requerimiento de un sistema 'de posicionamiento global diferencial "DGPS".
7.1.1 Solicitar el sistema de posiCionamiento global diferencial "DGPS" con girocompás electromagnético, o girocompás electrónico de alta precisión y operador del mismo, dentro de las bases técnicas de sus contratos.
Descripción de Actividades
De igual forma se solicita dicho equipo a bordo de los remolcadores de apoyo de. la Embarcación o Artefacto Naval.
Formas
7.2 Solicitud de lngeniero Supervisor de Posicionamientos. , l 1 Activos y10 dependencias
Activos y10 , dependencias n
7.2.1 Requerir la presencia de un Ingeniero de Posicionamientos para supervisar: maniobras 'de retiro, acercamiento y10 posicionamiento de Artefactos IVavales, maniobras de Embarcaciones con sistema de posicionamiento dinámico y10 maniobras de fondeo ó levado de anclas, lo solicitan oficialmente por escrito como mínimo con cinco (5) días de anticipación al departamento de Control Marino y Posicionamiento de Erribarcaciones de la Gerencia de Logística de la SCSM.
7.2.2 Trasladar al lngeniero Supervisor de Posicionamientos hacia la Embarcación ó Artefacto Naval, con cargo al activo o dependencia que lo solicite, por lo que en el oficio de requerimiento se proporciona
\\ la estructura programática para el direccionamiento de costos por 1
L 1 PG-LO-OP-0001-2011 1 PÁG: 24 i\ DE: 68 MAYO DE 2011 1 VERSI~N: 111 SEGUNDA 1
ELABORÓ RE~VISÓ
PROCEDlNllENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
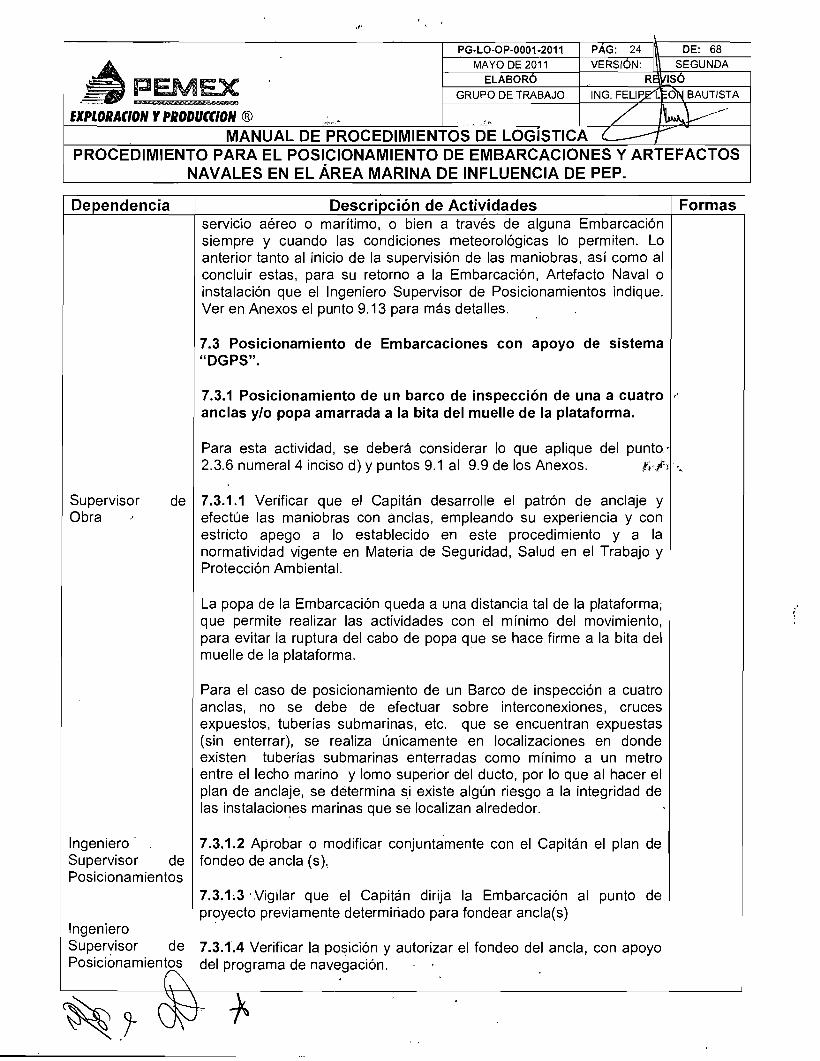
Dependencia servicio aéreo o marítimo, o bien a través de alguna Embarcación siempre y cuando las condiciones meteorológicas lo permiten. Lo anterior tanto al inicio de la supervisión de las maniobras, así como al concluir estas, para su retorno a la Embarcación, Artefacto Naval o instalación que el lngeniero Supervisor de Posicionamientos indique. Ver en Anexos el punto 9.13 para más detalles.
Supervisor de Obra
lngeniero ' . Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
7.3 Posicionamiento de Embarcaciones con apoyo de sistema "DGPS".
7.3.1 Posicionamiento de un barco de inspección de una a cuatro anclas y10 popa amarrada a la bita del muelle de la plataforma.
7.3.1.1 Verificar que el Capitán desarrolle el patrón de anclaje y efectúe las maniobras con anclas, empleando su experiencia y con estricto apego a lo establecido en este procedimiento y a la normatividad vigente en IVlateria de Seguridad, Salud en el Trabqjo y Protección Ambiental.
c.
Para esta actividad, se deberá considerar lo que aplique del punto- 2.3.6 numeral 4 inciso d) y puntos 9.1 al 9.9 de los Anexos. :ek$r.,
La popa de la Embarcación queda a una distancia tal de la plataforma; que permite realizar las actividades con el mínimo del movimiento, para evitar la ruptura del cabo de popa que se hace firme a la bita del muelle de la plataforma.
..
Para el caso de posicionamiento de un Barco de inspección a cuatro anclas, no se debe de efectuar sobre interconexiones, cruces expuestos, tuberías submarinas, etc. que se encuentran expuestas (sin enterrar), se realiza únicamente en localizaciones en donde existen tuberías submarinas enterradas como mínimo a un metro entre el lecho marino y lomo superior del ducto, por lo que al hacer el plan de anclaje, se determina si existe algún riesgo a la integridad de las instalaciones marinas que se localizan alrededor.
7.3.1.2 Aprobar o modificar conjuntamente con el Capitán el plan de fondeo de ancla (S).,
7.3.1;3 ..Vigilar que el Capitán dirija la Embarcación al punto de proyecto previamente determinado para fondear ancla(s)
7.3.1.4 Verificar la posición y autorizar el fondeo del ancla, con apoyo del programa de navegación. .
1 1 PG-LO-OP-0001-2011 1 PÁG: 25 h DE: 68 1
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
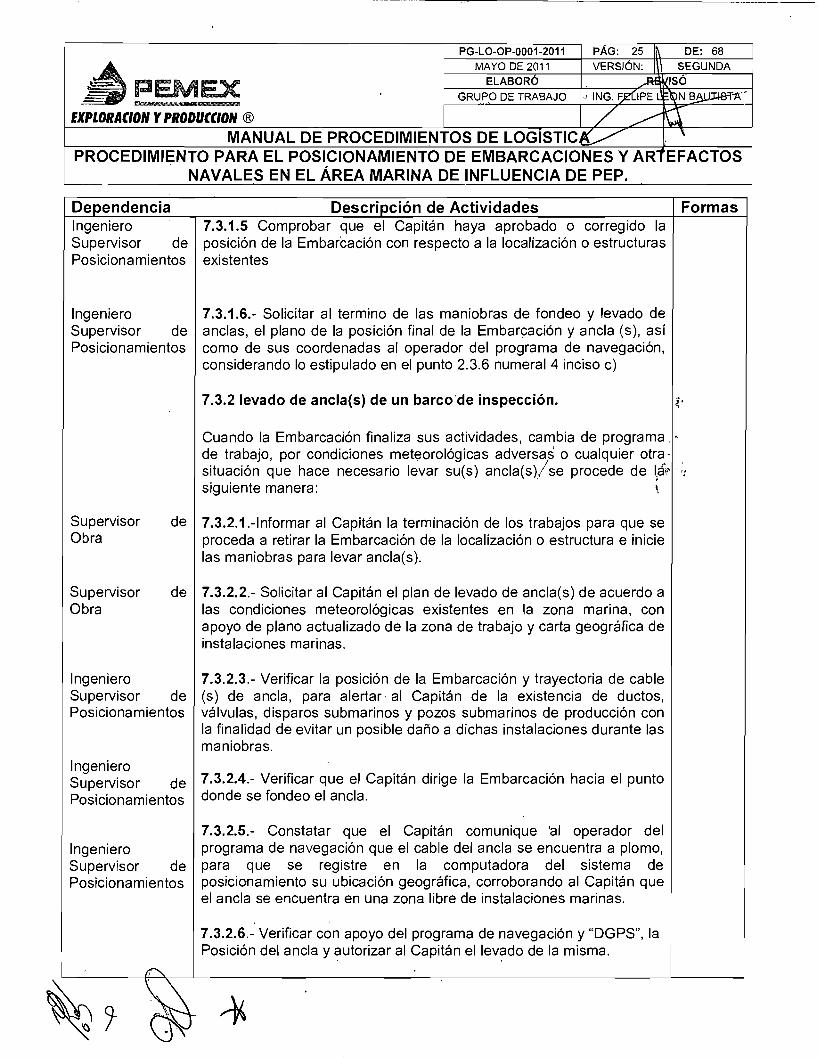
Dependencia Ingeniero Supervisor de Posicionamientos
I 7.3.2 levado de ancla(s) de u n barco'de inspección. 1 9 ' 1
Ingeniero Supervisor de .
Posicionamientos
Descripción de Actividades 7.3.1.5 Comprobar que el Capitán haya aprobado o corregido la posición de la Embarcación con respecto a la localización o estructuras existentes
7.3.1.6.- Solicitar al termino de las maniobras de fondeo y levado de anclas, el plano de la posición final de la Embarcación y ancla (S), así como de sus coordenadas al operador del programa de navegación, considerando lo estipulado en el punto 2.3.6 numeral 4 inciso c)
Formas
Cuando la Embarcación finaliza sus actividades, cambia de programa. de trabajo, por condiciones meteorológicas adversas o cualquier otra; situación que hace necesario levar su(s) ancla(s)/se procede de I$P,;: siguiente manera: \
*
Supervisor de Obra
7.3.2.1.-Informar al Capitán la terminación de los trabajos para que se proceda a retirar la Embarcación de la localización o estructura e inicie las maniobras para levar ancla(s).
Supervisor de Obra
7.3.2.2.- Solicitar al Capitán el plan de levado de ancla(s) de acuerdo a las condiciones meteorológicas existentes en la zona marina, con apoyo de plano actualizado de la zona de trabajo y carta geográfica de instalaciones marinas.
Ingeniero Supervisor de Posicionamientos
7.3.2.3.- Verificar la posición de la Embarcación y trayectoria de cable (S) de ancla, para alertar. al Capitán de la existencia de ductos, válvulasi disparos submarinos y pozos submarinos de producción con la finalidad de evitar un posible daño a dichas instalaciones durante las maniobras.
lngeniero Supervisor de Posicionamientos
7.3.2.6.- Verificar con apoyo del programa de navegación y "DGPS", la Posición del ancla y autorizar al Capitán el levado de la misma.
7.3.2.4.- Verificar que el Capitán dirige la Embarcación hacia el punto donde se fondeo el ancla.
Ingeniero Supervisor de Posicionamientos
7.3.2.5.- Constatar que el Capitán comunique 'al operador del programa de navegación que el cable del ancla se encuentra a plomo, para que se registre en la computadora del sistema de posicionamiento su ubicación geográfica, corroborando al Capitán que el ancla se encuentra en una zona libre de instalaciones marinas.
MANUAL DE PROCEDIMIENTOS DE LOGISTIC- 1 - Y
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
PG-LO-OP-0001-2011 PÁG: 26 81 MAYO DE 201 1 -
ELABOR~
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
GRUPO DE TRABAJO ' ING FNIP~ L+N BAUTISTA ---
lngeniero Supervisor de Posicionamientos
Dependencia Ingeniero Supervisor de Posicionarnientos
Supervisor de Obra
lngeniero Supervisor de Posicionamientos
Descripción de Actividades 7.3.2.7.- Verificar con el Capitán que el ancla quede colocada en el varadero y asegurada con cadena y freno del malacate (winche), para evitar su caída libre.
lngeniero -
Supervisor de Posicionamientos
Formas
lngeniero Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
7.3.2.8.-Solicitar al termino de las maniobras de fondeo y levado de anclas, el plano de la posición final de la Embarcación y ancla (S), así como de sus coordenadas al operador del programa de navegación, considerando lo estipulado en el punto 2.3.6 numeral 4 inciso c)
7.3.3 Posicionamiento de una Embarcación (Barco Grúa, Barcaza o Plataforma Sémi sumergible).
7.3.3.1.- Solicitar al Capitán que posicione la Embarcación al costado de una estructura marina u otra ubicación, para realizar trabajos.
Para esta actividad se considera lo que aplique del punto 2.3.6; numeral 4 incisos d) y f) y puntos 9.1 al 9.9 de los Anexos. además d@ contar mínimo con la asistencia de un remolcador de popa abierta, para el manejo de las anclas.
7.3.3.2.- Solicitar al Capitán desarrolle el plan de arribo y fondeo de anclas de la Embarcación, con apoyo de plano actualizado de la zona de trabajo y carta geográfica de instalaciones marinas.
,
,
;,.
7.3.3.3.- Aprobar o modificar el plan de fondeo de anclas, así como determinar en qué puntos es necesario utilizar el segundo remolcador de apoyo con su respectivo equipo de posicionamiento global diferencial "DGPS" abordo, en las áreas en donde existen arribos de ductos a plataformas sin enterrar, válvulas submarinas, líneas regulares o cruces de ductos con acolchonamiento o expuestos.
7.3.3.4.- Vigilar que el Capitán dirija el remolcador hasta el punto de fondeo previamente establecido con apoyo de radar, girocompás y "DGPS". En cada una de las anclas de la Embarcación el operador del
programa de navegación indica al Capitán cuando el remolcador con el ancla se encuentra en la posición de proyecto propuesta.
7.3.3.5.- Vigilar la trayectoria del remolcador hasta que arribe a la posición de proyecto, verificar la posición y autorizar fondeo con apoyo del programa de navegación y equipo "DGPS".
Ingeniero 7.3.3.6.- Confirmar que el Capitán aprueba o corrija la posición de la
lngeniero Supervisor de Posicionamientos
Dependencia Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
Supervisor de 1 Obra
Descripción de Actividades Embarcación con respecto a la estructura o ubicación en donde se realizarán trabajos. Al estar todas las anclas fondeadas, la tripulación encargada de la operación de los malacates (winches) de las anclas, mediante la acción de lascar y cobrar lentamente cada uno de los cables, coloca la Embarcación en la posición de trabajo.
7.3.3.7.- Solicitar al término de las maniobras un reporte que contenga el plano con la posición final de la Embarcación y las coordenadas de la posición de cada una de las anclas al operador del programa de navegación, de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 inciso c), Estos documentos los firmarán: Capitán, 'lngeniero, Supervisor de Posicionamientos, operador del programa de navegación y Supervisor de Obra, conservando cada uno de ellos una copia, para cualquier aclaración futura. 'i
Formas
7.3.3.8.- Verificar que los cables no toquen la(s) estructura(s),fó ducto(s) ascendente(s), cuando las maniobras de fondeo de anclas se realicen para que la Embarcación trabaje en cercanías de estructuras fijas, así como verificar diariamente la posición de cada una de las boyas de las anclas con apoyo del remolcador, a intervalos de tiempo no mayor de seis horas en las maniobras de tendido o dragado de líneas y en intervalos de 12 horas cuando esta permanece posicionada en determinada localización, durante el tiempo que permanezca la Embarcación con sus anclas fondeadas.
Si por alguna causa es necesario reposicionar una o varias anclas de la Embarcación durante las maniobras de posicionamiento o cuando se encuentra en posición de trabajo, se procede de acuerdo a los puntos 7.3.3 y 7.3.4.
7.3.4 levado de anclas de una Embarcación (Barco Grúa, Barcaza ó Plataforma Sémi sumergible).
Para esta actividad, se debe considerar lo que aplica de: puntos 9.1 al 9.9 de Ios~Anexos y del punto 2.3.6 numeral 4 incisos d) y f), además de contar con la asistencia de un remolcador de popa abierta, para el manejo de anclas
7.3.4.1 .- Informar al Capitái-i la terminación de los trabajos para que se proceda a retirar la Embarcación de la estructura (plataforma) o ubica- ción, y se inicien las maniobras correspondientes para levar anclas.
Ingeniero Supervisor ,de
7.3.4.2.-Elaborar Conjuntamente con el Capitán, el plan de levado de anclas y determinar si es necesario un segundo remolcador de apoyo
EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGISTICB( N
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIO~ES Y A~TEFACTOS
. . . . . - - .
NAVALES EN ELÁREA MARINA DE INFLUENCIA DE PEP..
PG-LO-OP-0001-2011 MAYO DE 201 1 --
ELABORÓ
Dependencia Posicionamientos
Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
DE: 68 SEGUNDA
/ S & I ~
PÁG: 28 2
lngeniero Supervisor de Posicionamientos
VERSIÓN:
Descripción de Actividades para evitar. el contacto de los cables con los ductos sin enterrar. La tripulación encargada de la operación de los malacates (winches) de las anclas, mediante la acción de lascar y cobrar lentamente cada uno de los cables, retira la Embarcación de la plataforma cuidando la dirección de los cables, para evitar que hagan contacto con las estructuras marinas y ductos ascendentes.
\
7.3.4.3.- Verificar que el Capitán de Remolcador recupere el orinque hasta tenerlo a plomo por su popa, y espere la instrucción de levar el ancla por parte del oficial de cubierta, esto previa autorización del lngeniero Supervisor de Posicionamientos. Cuando se requiere, con apoyo del 'sistema de posicionamiento, se le indica al Capitán del remolcador el,rumbo y distancia a las boyas de señalamiento de las. anclas posicionadas, para su pronta localización.
\
7.3.4.4.- Comprobar la posición del ancla con apoyo del programa be navegación y autorizar su levado. Cuando el Capitán del remolcador informa que el cable del ancla se encuentra a plomo, se registra en la computadora del programa de navegación su ubicacion geográfica, corroborando al Capitán del remolcador que el ancla se encuentra en una zona libre de instalaciones marinas, por lo que se le autoriza iniciar el levado de la misma.
7.3.4.5.- Verificar que el Primer Oficial dirija las maniobras para recibir del remolcador el ancla, orinque y boya.
7.3.4.6.- Solicitar al término de las maniobras un reporte que contenga el plano con la posición final de la Embarcación y las coordenadas de la posición de cada una de las anclas al operador del programa de navegación, de acuerdo 'a lo estipulado en el punto 2.3.6 numeral 4 inciso c), Estos dócumentos los firmarán: Capitán, Ingeniero, Supervisor de Posicionamientos, operador del programa de navegación y Supervisor de Obra, conservando cada uno de ellos una copia, para cualquier aclaración futura.
En las áreas en donde existen arribos de ductos a plataforma, líneas regulares sin enterrar, válvulas submarinas o cruces de ductos con acolchonamiento o expuestos, la Embarcación cuenta con un segundo remolcador de apoyo con su respectivo equipo de posicionamiento global diferencial "DGPS" a bordo.
El segundo remolcador de apoyo se utiliza para suspender el cable de las anclas que lo requieran con un gancho (chaser o grillete) según convenga o para recuperar las boyas intermedias, que se colocan para evitar aue el seno del cable del ancla dañe las instalaciones
Formad

NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Si por alguna causa es necesario reposicionar una o varias anclas de la Embarcación cuando se están efectuando maniobras de levado, se procede de acuerdo a los puntos: 7.3.3 y 7.3.4.
Dependencia
En estos casos se considera lo que aplica del punto 2.3.6 'numeral 4 inciso d) y punto 9.10 de los Anexos.
Descripción de Actividades submarinas.
. .
Formas
7.3.5. Posicionamiento o acercamiento de un Artefacto Naval (plataforma Auto Elevable de perforación de zapatas independientes ó Mat).
Ingeniero Supervisor de posicionamiento
b) Mapeo con sonar de barrido lateral de la localización, realizado recientemente '(no mayor a 90 días mientras no exista algún otro evento) y10 posterior a la realización de trabajos de construcción en la localización.
c) Distribución de conductores ("Domino") en caso de ser una estructura.
7.3.5.0 Verificar conjuntamente con el Rig Mover todo lo relacionadq con los remolcadores de apoyo y la plataforma Auto Elevable, para dqr: cumplimiento al punto 2.3.6 numeral 4 inciso d) y punto 9.10 de los
Gerencia de Perf. y 'Mantto. de Pozos.
d) Planos estructurales de la plataforma de PEiVlEX donde entrara el equipo de perforación, así como plano a escala con las dimensiones de la Plataforma Auto Elevable.
I Anexos. 7.3.5.1 .- Proporcionar al Ingeniero Supervisor de Posicionamientos, la siguiente información:
a) Coordenadas Geográficas y UTM del pozo en la próxima .localización a intervenir.
e) Plano de ductos actualizado de un. radio mínimo de 1 kilómetro de la localización, validado por la GTDH de la región a la que pertenezca, contando con sus coordenadas tramo a tramo, tomadas con R.O.V.
f) La orientación adecuada para posicionar la plataforma acordada con el Activo, en caso de ser una localización libre donde a futuro se instalará una estructura
l Ih) Análisis de riesgo del ~ r te fac to Naval. I I
PÁG: 30 8 DE: 68 VERSIÓN: i\ SEGUNDA
R$\~ISO ING. FELIJP&~N E~UTISTA 4 - - -
EXPLORACION Y PRODUCCION O
Dependencia
i) Análisis de riesgo de áreas compartidas, considerando las estructuras fijas y la plataforma auto elevable.
MANUAL DE PROCEDIMIENTOS DE LOGIS'TICA PROCEDIMIENTO PARA EL POSlClONAlVllENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 2011
ELABORÓ - GRUPO DE TRABAJO
j) Minuta de la reunión de programación de Barcos remolcadores y10 manejadores de anclas.
k) Análisis de seguridad en el trabajo específico para el cierre pozos y 'desfogue de ductos (siguiendo el instructivo clave IG-SS-TC-002-2008) acorde a las listas de verificación para movimiento de plataformas, desarrollado por el grupo multidisciplinario para la planeación del traslado de un Artefacto Naval, en el que evaluaron y dictaminaron las condiciones de riesgo. .i
Descripción de Actividades g) Análisis de riesgo' de la estructura o complejo de producción si requiere por su proximidad donde se posicionará el Artefacto Naval.
Supervisor de Obra
Formas
Gerencia de Perforación y lblantenimiento de Pozos. .
Activos
7.3.5.2.- Solicitar al Rig Mover que trace, previo al inicio del retiro y10 acercamiento de la plataforma N E , una ruta de navegación con la finalidad de cruzar el mínimo de ductos submarinos, y notifique al lngeniero Supervisor de Posicionamientos.
7.3.5.3 Verificar en conjunto con el personal de. la Compañía de servicio, que la condición de los pozos y todos los requerimientos solicitados,en las visitas al sitio, se efectué de acuerdo al procedimiento PG-LO-OP-002-2009, solicitando en caso de requerirse cualquier ,trabajo adicional, previo a la entradalsalida de la Auto Elevable. Así mismo en caso de presentarse algún evento no deseado, detonará por la rama de Perforación, el protocolo para reporte de ,información interna y externa sobre situaciones anormales, incidentes, accidentes y10 emergencias en todo centro de trabajo e instalación , clave 202-1 1000-POP-109-OOI', por la rama del Activo.
5 7.3.5.4 Coordinar al lngeniero de Operación y ,los ayudantes "C" de producción para el cierre y apertura de pozos cuando sea requerido y notificar al Supervisor de Contratos de la Plataforma de esta acciones; así como de las condiciones en que se entregan y'reciben todas las veces que esto ocurra, dejando documentado con una minuta. Asimismo,en caso de presentarse algún evento no deseado detonará el procedimiento de notificación 202-1 1000-POP-109-001, por la rama del Activo.
7.3.5.5.- Constatar que el Operador del programa de navegación del Sistema de posicionamiento Global
d e la plataforma Auto Elevable de coordenadas conocidas y de
EXPLORACION Y PRODUCCION O 2- - + - A 'i
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
lngeniero Supervisor de Posicionamientos
Dependencia
lngeniero Supervisor de Posicionamientos
la trayectoria en el programa de navegación a intervalos de tiempo que se reducen conforme está más cercana la localización.
Descripción de Actividades acuerdo al proyecto previamente establecido, confirmar que se grabe
7.3.5.6.- Solicitar al Rig IVlover, cada vez que así lo requiera, le proporcione la altura de las zapatas o Mat con respecto al lecho marino.
Formas
Durante la navegación de una plataforma AJE con destino a una estructura fija en la cual se va a intervenir algún pozo, las zapatas independientes de cada una de las piernas o el Mat permanecen a una altura' suficiente del lecho marino para garantizar la integridad de las instalaciones submarinas. Cada vez que se cruce un ducto submarino durante la navegación, el operador del programa de navegación imprime una grafica donde se registra la hora y las coordenadas UTIY;~ de la plataforma, anotando en la misma grafica el tirante de agua y ..¡g altura de las piernas o Mat con respecto al lecho marino.
7.3.5.7.- Tomar en consideración conjuntamente con el Rig Mover, que en caso de ser necesario, previo al arribo de la plataforma Auto Elevable, un barco de buceo coloque boyas de señalamiento en las válvulas submarinas, pozos submarinos de producción, conductores submarinos y10 curvas de expansión de los ductos que arriban a la estructura involucrada, para salvaguardar su integridad. -
lngeniero Supervisor de Posicionamientos
Activos
7.3.5.9.- Confirmar con el Rig Mover que se esté llevando la actividad de acuerdo al punto anterior.
7.3.5.8.-Garantizar que cuando la plataforma se encuentre a una distancia de 150 metros, (previa solicitud del superintendente de perforación) se aplique lo correspondiente de acuerdo al punto 7.3.5.12 antes de los cuales las zapatas independientes de cada una de las piernas o Mat, deben estar con respecto al lecho marino a una altura mínima de 10 metros, de manera que garantice la integridad de las instalaciones aledañas al área de maniobras.
A 75 y 50 metros antes de la localización, la plataforma Auto Elevable en ambos casos realiza un alto total, para efectuar un barrido del lecho marino con un Sonar de sector programable.
Después de verificar que el lecho marino está claro, la plataforma Auto Elevable efectúa movimientos lentos conforme al Plan de acercamiento establecido por el Rig IVlover, durante los cuales se detiene totaln-iente y efectúa barridos del lecho marino con un Sonar e sector programable, a fi* 1 bb-i
1 EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOG~STICA L-' "
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
1 De~endencia Descri~ción de Actividades 1 ~ o r m a s 1
lngeniero Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
Activos
7.3.5.10.- Corroborar que las zapatas de piernas independientes o las uñas del Mat de la plataforma Auto Elevable quedan a una distancia segura con respecto a las curvas de expansión, piernas de estructuras fijas, válvulas submarinas, pozos submarinos de producción y conductores submarinos, para evitar daños a las mismas y en consecuencia al entorno ecológico.
7.3.5.11.- Elaborar, al concluir cualquier tipo de maniobra con una Plataforma Auto Elevable, una carta de entrega en donde se mencionan las coordenadas UTM y Geográficas de la posición final, aproamiento de la plataforma, tirante de agua, nombre de los remolcadores de apoyo y sistema de posicionamiento utilizado; se le anexa el plano obtenido con el programa de navegación, ambos documentos lo firman: Capitán yló Rig Mover, supervisor de obra f, lngeniero Supervisor de Posicionamientos y operador del programa de navegación, quienes conservan una copia para cualquier aclaración futura.
Es responsabilidad total del Rig Mover el acercamiento a la estructura, hincado de las piernas o Mat y acoplamiento final a los conductores de la estructura fija.
7.3.5.12- Paralelamente a lo anteriormente expuesto, se deberá de dar cumplimiento a lo siguiente: 1
7.3.5.12.1 Coordinar la elaboración del Análisis de Seguridad en el Trabajo especifico (AST), de acuerdo al instructivo clave IG-SS-TC- 002-2008 y en el caso de que el mismo determine el cierre de pozos y10 cierre y desfogue de ductos y boyado, continuara con los puntos 7.3.5.12.2, 7.3.5.12.3, 7.3.5.12.4, 7.3.5.12.5 y en el caso de no requerir el cierre y10 desfogue, se realizará el acercamiento del Artefacto Naval cumpliendo las recomendaciones observadas en el AST.
7.3.5.12.2.- Para el acercamiento de la Plataforma, a 150 metros de la localización o a la distancia resultado del AST desarrollado por el Grupo Multidisciplinario, pegar zapatas o Mat al fondo del lecho marino:
Activos
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación de la válvula de
dormenta y que el pozo sea fluyente, éste deberá controlarse como lo \de ermine el AST. Para las líneas submarinas en la trayectoria de
1 1 PG-LO-OP-0001-2011 1 PÁG: 33 fl DE: 68 1 MAYO DE 201 1
ELABORO GRUPO DE TRABAJO
/ ' EXPLORAQON Y PRODUCCION O ,. I y
MANUAL DE PRocEDlMlENTos DE LoGísTlcL///\% PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR~EFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
7.3.5.1 2.3.- Posicionamiento en la localización del proyecto. I I a) Para el caso de posicionamiento del IVIAT: I l
Formas Dependencia
Activos
Descripción de Actividades acercamiento de la Plataforma Autoelevable, desfogar a la presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso de las zapatas ó base del lvat como lo cdetermine el AST, para lo cual se considerará en la lista de verificación del AST.
b) Para plataformas de zapatas Independientes, al estar realizando la Precarga:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato\ 1) y en caso de que se presente ó exista comunicación en el pozo,q este deberá controlarse como lo determine el AST. Para las líneas';. submarinas en la trayectoria de acercamiento del Artefacto Naval, desfogar a la presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso de la base del Mat como lo determine el AST, para lo cual se considerará en la lista de verificación del AST.
1
t. t . - + . A
7.3.5.12.4.- Para el proceso de levantar el casco buscando el colchón de trabajo de las zapatas indepe,ndiente o Mat.
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
1 Realizar lo que determine el AST.
.
7.3.5.12.5.- Para el proceso de deslizar el Cantiliver a posición de trabajo sobre el área de pozos:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ,o exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
este concepto hasta que el cantiliver este en el área de pozos y se haya realizado
1 PG-LO-OP-0001-2011 1 PAG: 34 1 DE: 68 1 MAYO DE 201 1 I V E R S I ~ N : I\ SEGUNDA l
EXPLORACION r PRODUCCION O MANUAL DE PROCEDIMIEN!OS DE L O G ~ S T I C ~ ///'LdC
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
cantiliver. I l Dependencia
7.3.6. Retiro de Plataforma Auto Elevable de perforación de zapatas independientes ó Mat.
Para retirar una plataforma Auto Elevable de una estructura en donde existen ductos y válvulas submarinas cercanas, se considera lo que aplica del punto 9.10 de los Anexos y del punto 7.3.5.1, 7.3.5.2 y
Descripción de Actividades interconexión al 100% como lo determine el AST, para movimiento del
Activos
Formas
lngeniero Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
7.3.6.1 .- Garantizar que cuando la plataforma inicie retraer cantiliver, se aplicó lo correspondiente al cierre de pozos de acuerdo al punto 7.3.6.4.
4 7.3.6.2.- Solicitar al Rig Mover le informe continuamente la altura a 'la que se encuentra cada una de las zapatas o Mat, así como el momento en el que inicia el desplazamiento de la Plataforma Auto Elevable, la cual sigue la ruta de proyecto propuesta previamente, para evitar que con el arrastre de las Zapatas o Mat, se ocasionen daños a las instalaciones submarinas; el operador del programa de navegación comprobará y registrará continuamente en- la computadora del sistema de posicionamiento diferencial "DGPS" la posición de la Plataforma Auto Elevable, hasta que las Zapatas o Mat están suficientemente arriba del lecho marino y en un área libre de instalaciones marinas y submarinas.
7.3.6.3.- Elaborar al concluir la maniobra de retiro de una Plataforma Auto Elevable, una carta de entrega en donde se mencionan las coordenadas LlTM y Geográficas de la posición inicial, aproamiento de la plataforma, tirante de agua, nombre de los remolcadores de apoyo y sistema de posicionamiento utilizado; se le anexan los planos de la ruta de retiro obtenidos con el programa de navegación, dichos documentos los firman: Capitán yló Rig Mover, supervisor de obra , lngeniero Supervisor de Posicionamientos y operador del programa de navegación, quienes conservan una copia para cualquier aclaración futura. Es responsabilidad del Rig Mover ,el retiro de la plataforma Auto. Eleva ble.
Cuando el lngeniero Supervisor de Posicionamientos tiene la certeza de que alguna de las instalaciones submarinas cercanas a las maniobras de la Plataforma Auto Elevable resulta con daños
otivados por las citadas maniobras, reporta de inmediato a la rdinación de Control Marino y Posicionamiento de Embarcaciones
\ \
PG-LO-OP-0001-2011 1 PÁG: 35 1 DE: 68 MAYO DE 201 1 1 VERSI~N: U\ SEGUNDA
EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGISTICA/ /
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE E M B A R C A C I O ~ Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE ,PEP.
Dependencia
Activos
Activos
Descripción de Actividades quien a su vez informa a la Coordinación de Mantenimiento de Ductos de la Región Marina correspondiente, quien envía una Embarcación a realizar una inspección directa (con R.O.V. o buzos) o indirecta (con sensores remotos) para determinar los daños hechos a la instalación.
7.3.6.4.- paralelamente a lo anteriormente expuesto, se deberá, de dar cumplimiento a lo siguiente:
7.3.6.4.1.- Salida de Plataformas Auto Elevables tipo Mat en plataformas fijas con pozos en producción :.
7.3.6.4.1.1 .- Para retraer cantiliver:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas 'maestras superficiales y de tormenta verificando la: hermeticidad de las mismas (aplicando la lista de verificación ~ormat& 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
7.3.6.4.1.2.- Para bajar el casco:
Realizar lo que determine el AST
7.3.6.4.1.3.- Para levantar el MAT del fondo y colocar MAT en posición de tránsito:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en.caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
Para l& Iíneas. submarinas en la trayectoria de retiro del Artefacto Naval,' desfogar a la ,presión determinada por el AST, debiendo abanderaise (boyarse) las Iíneas que se encuentren en la periferia del paso de la base del ~ a t como lo determine el AST. Adicionalmente a lo anterior se requiere que los remolcadores estén amarrados a la plataforma.
7.3.6.4.1.4.- Para mover la Plataforma Auto Elevable a 150 mts:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la
Cbermeticidad de las mismas (aplicando la lista de verificación Formato
PROCEDINIIENTO PARA EL POSICIONANIIENTO DE ENIBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Activos
Para las Iíneas submarinas en la trayectoria de retiro de la Plataforma Autoelevable, desfogar a la presión determinada por el A.ST, debiendo abanderarse (.boyarse) las Iíneas que se encuentren en la periferia del paso de la base del mat como lo determine el AST.
Formas Dependencia
Una vez retirada la plataforma Auto Elevable a 150 metros de la localización o a la distancia resultado del AST desarrollado por el Grupo Multidisciplinario, se podrá proceder a la apertura de los pozos en caso de haberse cerrado. ?
Descripción 'de Actividades 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
7.3.6.4.2.- Salida de Plataforn~as Auto Elevables tipo zapata$ >,J
independientes en plataformas fijas con pozos en producción. .f
1 7.3.6.4.2.1 - Para retraer cantiliver:
Activos .-.
Activos '
7.3.6.4.2.2.- Para bajar casco y aflojar zapatas a profundidád mínima de penetración:
~ea.lizar lo.que . . determine.el AST.
En caso d e requerirse. el cierre de pozos se efectuará operando las 1 : válvulas maestras superficiales y de tormenta verificando la 1~ hermeticidad de las mismas (aplicando la lista de verificación,Forrnato 1) y en caso de que se presente ó exista comunicación en el pozo;. este deberá controlarse como lo determine el AST. Vr
Para las líneas submarinas en la trayectoria de retiro del la Plataforma Autoelevable, desfogar a la presiór; determinada por el AST? Adiciorialmente a Io anterior se reqüiere que los remolcadores estéri amarrados a la piataforma.
.: L+
7.3.6.4.2.3.- Para liberar zapatas de profundidad mínima de penetración a libies:
En caso de requerirse, ei cierre de pozos se efectuará operando las válvulas' maestras superficiales . y de tormenta verificando ,la hermeticidad de'!as rnismas (aplicando la lista de verificación Formato
%:,,.
1) y -en caso de que se presente ó existz comunicación en el pozo, este deberá controlarse como lo determine'ei AST.
- l
I ' , o . . :c .,<: *
I . -.' . 1 ,, . , / * l7 - d
EXPLORAOON Y PRODUCCION O
Dependencia
,
Gerencia de Perf. y Mantto. de Pozos, División Marina yNorte,
Ingeniero Supervisor de Posicionamientos 1 Supervisor de Obra
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA jV PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR~EFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Descripción de Actividades 7.3.6.4.2.4.- Salida de plataforma Auto Elevable de zapatas independientes' a 150 mts:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST. Para las líneas submarinas en la trayectoria de retiro de la Plataforma Auto elevable, desfogar a la presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso de las zapatas.
Una vez retirada la plataforma Auto Elevable a 150 metros de la.! localización 'o a la distancia resultado del AST desarrollado por elflyJ Grupo Multidisciplinario, se podrá proceder a la apertura de los pozq';' en caso de haberse cerrado, Ver en .Anexos el punto 9.14 primer párrafo.
i .i
7.3.7 Posicionamiento de un Artefacto Naval (Plataforma Sémi sumergible de Perforación) o barco de Perforación, con sistema de anclaje. En estos casos, se considera lo que aplica de: puntos 9.1 al 9.9 de los Anexos, así como del punto 2.3.6 numeral 4 incisos b), c) y d).
7.3.7.1 .- Proporcionar al lngeniero Supervisor de Posicionamientos, la siguiente información:
a) Coordenadas Geográficas y UTM del pozo en la próxima localización a intervenir.
b) Mapeo con sonar de barrido lateral de la localización, realizado recientemente(n0 mayor a 90 días mientras no exista algún otro evento) y10 posterior a la realización de trabajos de construcción en la localización
c) Orientación adecuada para posicionar el Barco.
7.3.7.2.- Verificar que el Capitán efectúe este tipo de maniobras empleando toda su experiencia y con estricto apego a lo establecido en este procedimiento y a la normatividad vigente en lblateria de Seguridad Industrial, Salud en el Trabajo y Protección Ambiental. Confirmar que el Capitán, antes de iniciar las maniobras, tome en cuenta las condiciones meteorológicas, así como considere los ductos submarinos que se encuentran sin enterrar, debido a que las anclas de
Formas
..,
!:P
lngeniero Supervisor de Posicionamientos
lngeniero Supervisor de Posicionamientos
Formas Dependencia
lngeniero Supervisor de Posicionamientos
Descripción de Actividades este tipo de Embarcación pueda contar con cadena y cable, por lo que se deberá tener extrema precaución para evitar daños a las instalaciones submarinas aledañas al área de maniobras colocando boyas intermedias.
lngeniero Supervisor de Posicionamientos
7.3.7.3.- Veri.ficar con el Capitán que el'operador del Programa de Navegación le haya indicado en cada una de las anclas de la Embarcación, cuando el remolcador con el ancla se encuentra en la posición de proyecto propuesta, para girar instrucciones al remolcador de fondearla; después de fondear el ancla, se conecta el orinque del ancla a la boya de señalamiento.
7.3.7.4.- Verificar con el Capitán que al estar todas las anclas fondeadas, la tripulación encargada de la operación de los malacates (winches) de las anclas, mediante la acción de lascar y cobras lentamente cada uno de los cables y con apoyo del sistema d,e posicionamiento "DGPS", haya colocado la Embarcación o Artefacto Naval de tal manera que la torre'de perforación esté en el punto a perforar, de acuerdo a las coordenadas de proyecto.
7.3.7.5.- Vigilar que el Operador del Programa de Navegación proceda al concluir las maniobras de fondeo yló reposicionamiento de anclas, de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 incisos c) y d).
7.3.7.6.- Elaborar una carta de entrega al concluir las maniobras de posicionamiento, en donde se niencionen las coordenadas U.T.M. y .geográficas de la posición final de la torre de perforación, orientación de la proa, tirante de agua, nombre de remolcador (es) de apoyo y sistema de posicionarriiento utilizado, se le anexa el plano obtenido con el programa de navegación, ambos documentos lo firman, el Capitán yló Rig Mover, Supervisor de contrato , Supervisor de obra , lngeniero Supervisor de Posicionamientos y operador de programa de navegación, quienes conservan una copia para cualquier aclaración futura.
Para el caso de las plataformas Semisumergibles de Perforación contratadas para laborar en aguas profundas, se deberá de cumplir lo que aplica del punto 7.3.7, además de los procedimientos propios que presenta la compañía y que son aprobados por la Gerencia de Logística, SCSM
PG-LO-OP-0001-2011 PAG: 39 \ DE: 68 MAYO DE 201 1 V E R S I ~ N : \ SEGUNDA u
Dependencia Gerencia de Perf.
Termina procedimiento.
y Mantto. de Pozos, División Marina y Norte,
Descripción d e Actividades 7.3.8 Levado de anclas de un Artefacto Naval (Plataforma Sémi sumergible de Perforación) o barco de perforación.
Para esta actividad, se considera lo que aplica de: Anexos 9.2 al 9.9 y del punto 7.3.4, además de los procedimientos propios que presenta la Compañia y que son revisados por la Gerencia de Logística, SCSM.
Formas

1 EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGISTICA U
PROCEDIMIENTO PARA EL POS~CIONAMIENTO DE EMBARcAcIoNES<EFAcTos NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 20 1 1
ELABORO GRUPO DE TRABAJO
8. DIAGRAMAS DE FLUJO
ACTIVOS Y10 DE OBRA DEPENDENCIAS
PÁG: 40 VERSIÓN:
ING. SUPERVISOR
DE POSIC.
\ DE: 68 \) SEGUNDA
GERENCIA DE PERF. Y
MANTTO. DE POZOS
R ~ I S Ó ING. F E L I P W ~ N BAUTISTA
ACTIVIDADES
INICIA PROCEDIMIENTO
7.1 Requerimiento de un Sistema de Posicionamiento Global Diferencial.
7.1.1 Solicitar el sistema de posicionamiento global diferencial "DGPS" con girocompás electromagnético, o girocomphs electrónico de alta precisión y operador del mismo, dentro de las bases técnicas de sus contratos.
De igual forma se solicita dicho équipo a bordo de los remolcadores de apoyo de la Embarcación o Artefacto Naval.
7.2 Solicitud de lngeniero Supervisor de Posicionamientos.
7.2.1 Requerir la presencia de un lngeniero de Posicionamientos para supervisar: maniobras de retiro, acercamiento y10 posicionamiento de Artefactos Navales, maniobras de Embarcaciones con sistema de posicionamiento dinámico y10 maniobras de fondeo Ó levado de anclas, lo solicitan oficialmente por escrito como mínimo con cinco (5) días de anticipación al departamento de Control Marino y Posicionamiento de Embarcaciones de la Gerencia de Logística de la SCSM.
7.2.2 Trasladar al lngeniero Supervisor de Posicionarnientos hacia la Embarcación Ó Artefacto Naval, con cargo al activo o dependencia que lo solicite, por lo que en el oficio de requerimiento se proporciona la estructura programática para el direccionamiento de costos por servicio aéreo o marítimo, o bien a través de alguna Embarcación siempre y cuando las condiciones mete~rológicas lo permiten. Lo anterior tanto al inicio de la supervisión de las maniobras, así como al concluir estas, para su retorno a la Embarcación, Artefacto Naval o instalación que el lngeniero Supervisor de Posicionamientos indique. Ver en Anexos el punto 9.1 3 para más detalles.
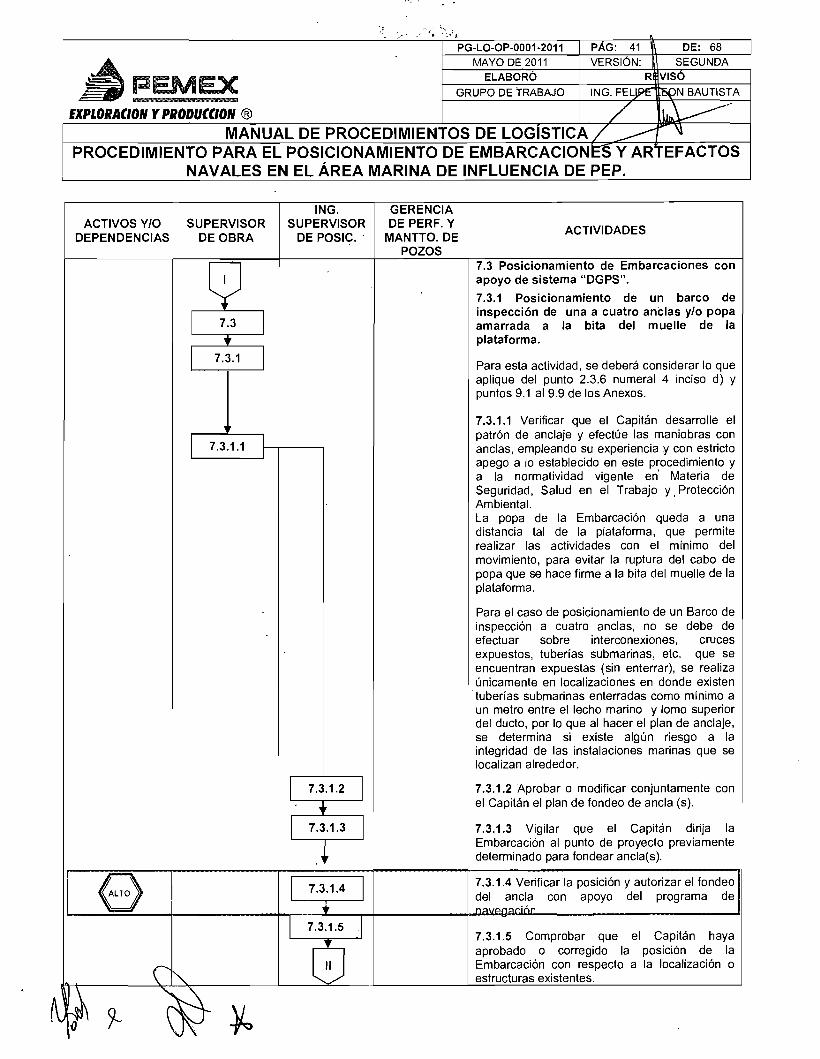
'ING. GERENCIA ACTIVOS Y10 SUPERVISOR SUPERVISOR DE PERF. Y
DEPENDENCIAS DE OBRA DE POSIC. ' MANTTO. DE ACTIVIDADES
POZOS 7.3 Posicionamiento de Embarcaciones con apoyo de sistema "DGPS".
7.3.1 Posicionamiento de un barco de inspección de una a cuatro anclas y10 popa amarrada a la bita del muelle de la plataforma.
Para esta actividad, se deberá considerar lo que aplique del punto 2.3.6 numeral 4 inciso d) y puntos 9.1 al 9.9 de los Anexos.
7.3.1.1 Verificar que el Capitán desarrolle el patrón de anclaje y efectúe las maniobras con anclas, empleando su experiencia y con estricto apego a lo establecido en este procedimiento y a ' la normatividad vigente en' Materia de Seguridad, Salud en el Trabajo y , Protección Ambiental. La popa de la Embarcación queda a una distancia tal de la plataforma, que permite realizar las actividades con el mínimo del movimiento, para evitar la ruptura del cabo de popa que se hace firme a la bita del muelle de la plataforma.
Para el caso de posicionamiento de un Barco de -inspección a cuatro anclas, no se debe de efectuar sobre interconexiones, cruces expuestos, tuberías submarinas, etc. que se encuentran expuestas (sin enterrar), se realiza únicamente en localizaciones en donde existen tuberías submarinas enterradas como mínimo a un metro entre el lecho marino y lomo superior del ducto, por lo que al hacer el plan de anclaje, se determina si existe algún riesgo a la integridad de las instalaciones marinas que se localizan alrededor.
7.3.1.2 Aprobar o modificar conjuntamente con el Capitán el plan de fondeo de ancla (S).
7.3.1.3 Vigilar que el Capitán dirija la Embarcación al punto de proyecto previamente determinado para fondear ancla(s).
7.3.1.5 Comprobar que el Capitán haya aprobado o corregido la posición de la Embarcación con respecto a la localización o estructuras existentes.
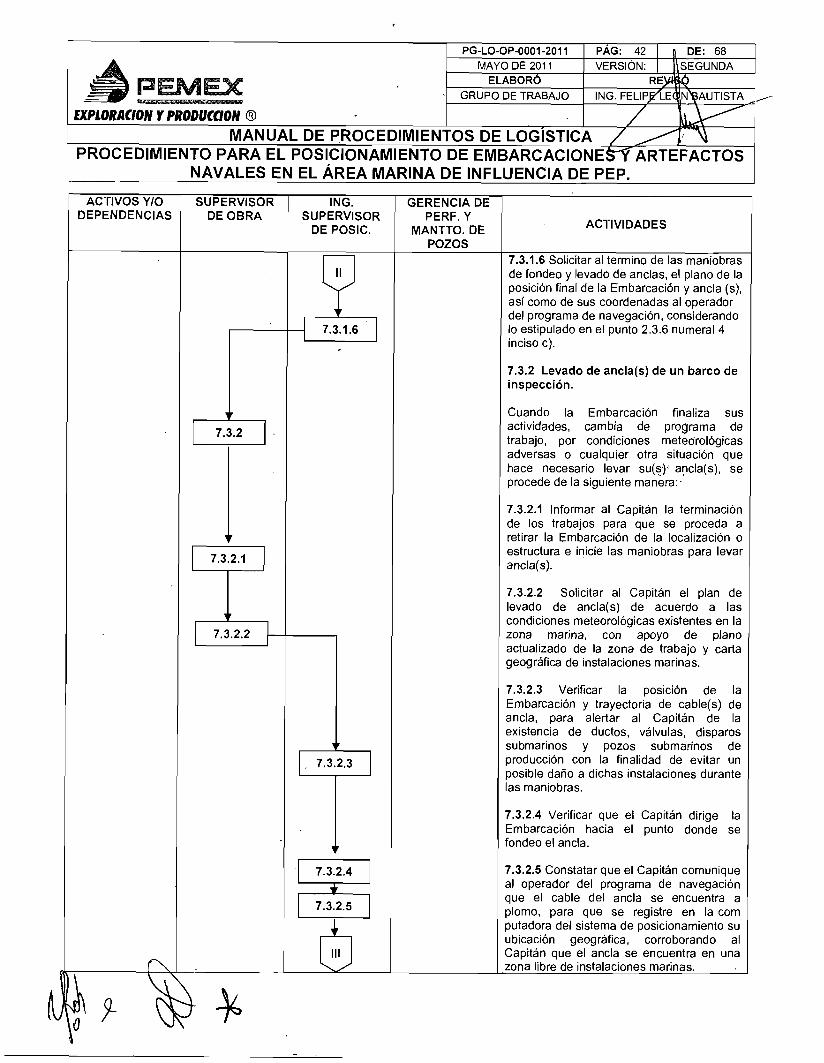
PG-LO-OP-0001-2011 PÁG: 42 1 DE: 68 MAYO DE 201 1 VERSI~N: 1 \\SEGUNDA
ELABORO GRUPO DE TRABAJO ING. FELIP~LE~N\~AUTISTA ,
- - l I
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA / PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONESIARTEFACTOS
L..-- NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
AC'IIVOS Y10 DEPENDENCIAS
SUPERVISOR DE OBRA
--
v 7.3.2.1
ING. SUPERVISOR
DE POSIC.
7.3.1.6
que el cable del ancla se encuentra a plomo, para que se registre en la com putadora del sistema de posicionamiento su ubicación geográfica, corroborando al Capitán que el ancla se encuentra en una zona libre de instalaciones marinas.
v , 7.3.2.3
v
Cuando la Embarcación finaliza sus actividades, cambia de programa de trabajo, por condiciones meteorológicas adversas o cualquier otra situación que hace necesario levar su(s.)' ancla(s), se procede de la siguiente manera:,
7.3.2.1 Informar al Capitán la terminación de los trabajos para que se proceda a retirar la Embarcación de la localización o estructura e inicie las maniobras para levar ancla(s).
7.3.2.2 Solicitar al Capitán el plan de levado de ancla(s) de acuerdo a las condiciones meteorológicas existentes en la zona marina, con apoyo de plano actualizado de la zona de trabajo y carta geográfica de instalaciones marinas.
7.3.2.3 Verificar la posición de la Embarcación y trayectoria de cable(s) de ancla, para alertar al Capitán de la existencia de ductos, válvulas, disparos submarinos y pozos submarinos de producción con la finalidad de evitar un posible daño a dichas instalaciones durante las maniobras.
7.3.2.4 Verificar que el Capitán dirige la Embarcación hacia el punto donde se fondeo el ancla.
7.3.2.5 Constatar que el Capitán comunique al operador del programa de navegación
GERENCIA DE PERF. Y
MANTTO. DE POZOS
ACTIVIDADES
7.3.1.6 Solicitar al termino de las maniobras de fondeo y levado de anclas, el plano de la posición final de la Embarcación y ancla (S), así como de sus coordenadas al operador del programa de navegación, considerando lo estipulado en el punto 2.3.6 numeral 4 inciso c).
7.3.2 Levado de ancla(s) de un barco de inspección.
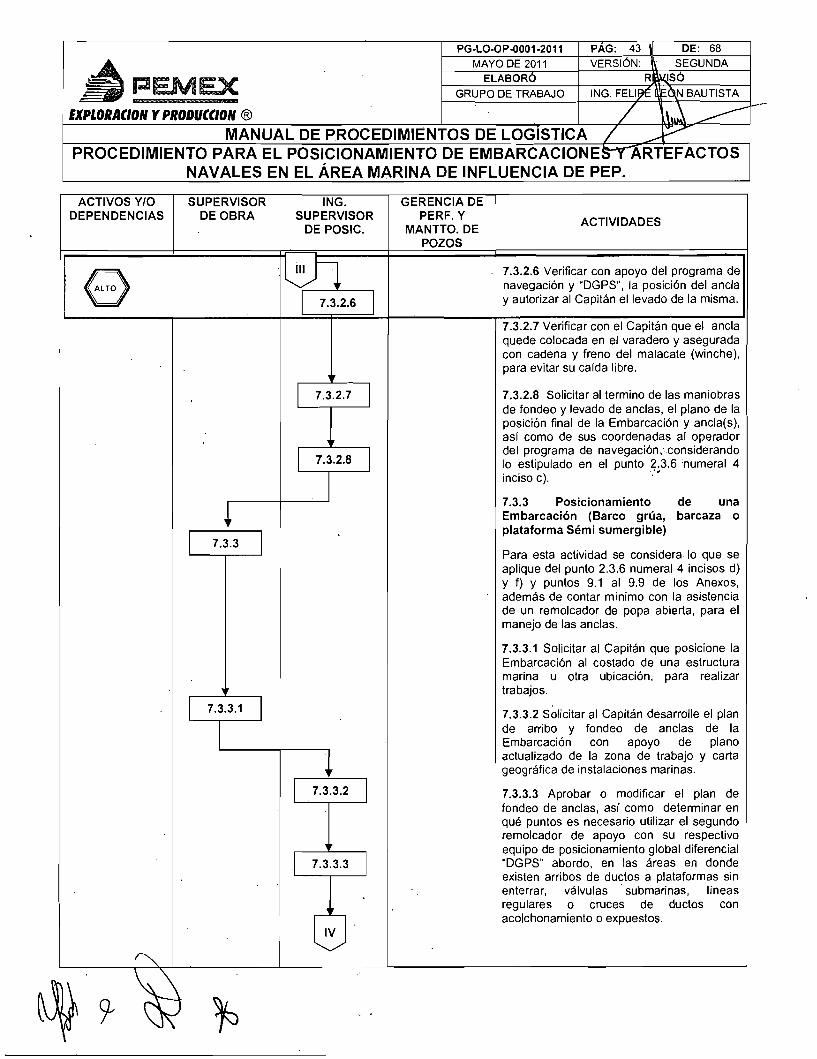
1 1 PG-LO-OP-0001-2011 1 PÁG: 43 11 DE: 68 1
' EXPlORAClON Y PRODUCCION O MANUAL DE P.RocEDmmEN!Os DE LoGísTlcA /'
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE E M B A R C A C I O N E ~ R T E F A C T O S
MAYO DE 201 I E L A B O R ~
GRUPO DE TRABAJO
1 NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP. 1
VERSI~N: Y\ SEGUNDA RMS~
ING. F E L I ~ (&N BAUTISTA / u \
ACTIVOS Y10 DEPENDENCIAS
SUPERVISOR ING. GERENCIA DE DE OBRA SLIPERVISOR PERF. Y
DE POSIC. MANTTO. DE ACTIVIDADES
POZOS
7.3.2.6 Verificar con apoyo del programa de navegación y "DGPS", la posición del ancla y autorizar al Capitán el levado de la misma.
7.3.2.8 Solicitar al termino de las maniobras de fondeo y levado de anclas, el plano de la posición final de la Embarcación y ancla(s), así como de sus coordenadas al operador del programa de navegación, considerando lo estipulado en el punto 2,3.6 'numeral 4 inciso c).
7.3.3 Posicionamiento de una Embarcación (Barco grúa, barcaza o plataforma Sémi sumergible)
Para esta actividad se considera lo que se aplique del punto 2.3.6 numeral 4 incisos d) y f) y puntos 9.1 al 9.9 de los Anexos, además de contar mínimo con la asistencia de un remolcador de popa abieria, para el manejo de las anclas.
7.3.3.1 Solicitar al Capitán que posicione la Embarcación al costado de una estructura marina u otra ubicación, para realizar trabajos.
7.3.3.2 Solicitar al Capitán desarrolle el plan de arribo y fondeo de anclas de la Embarcación con apoyo de plano actualizado de la zona de trabajo y carta geográfica de instalaciones marinas.
7.3.3.3 Aprobar o modificar el plan de fondeo de anclas, así como determinar en qué puntos es necesario utilizar el segundo remolcador de apoyo con su respectivo equipo de posicionamiento global diferencial "DGPS" abordo, en las áreas en donde existen arribos de ductos a plataformas sin enterrar, válvulas submarinas, lineas regulares o cruces de ductos con acolchonamiento o expuestos.
POZOS 7.3.3.4 Vigilar que el Capitán dirija el remolcador hasta el punto de fondeo previamente establecido con apoyo de radar, giroscopio y "DGPS".
ACTIVOS Y10 DEPENDENCIAS.
En cada una de las anclas de la Embarcación el operador del programa de navegación indica al Capitán cuando el remolcador con el ancla se encuentra en la posición de proyecto propuesta.
GERENCIA DE PERF. Y
MANTTO. DE
7.3.3.5 Vigilar la trayectoria del remolcador hasta que arribe a la posición de proyecto, verificar la posición y autorizar fondeo con apoyo del programa de navegación y equipo "DGPS".
ACTIVIDADES
SUPERVISOR DE OBRA
7.3.3.6 Confirmar que el Capitán aprueba o corrija la posición de la Embarcación con respecto a la estructura o ubicación en donde se realizarán trabajos. Al estar todas las anclas fondeadas, la tripulación encargada de la operación de los malacates (winches).de las anclas, mediante la acci6n de lascar y cobrar lentamente cada uno de los cables, coloca la Embarcación en la posición de trabajo.
ING. SCIPERVISOR
DE POSIC.
7.3.3.7 Solicitar al término de las maniobras un reporte que contenga el plano con la posición final de la Embarcación y" las coordenadas de la posición de cada una de las anclas al operador del programa de navegación, de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 inciso c), Estos documentos los firmarán: Capitán, Ingeniero, Supervisor de Posicionamientos , operador del programa de navegación y Supervisor de Obra, conservando cada uno de ellos una copia, para cualquier aclaración futura.
7.3.3.8 Verificar que los cables no toquen la(s) estructura(s) ó ducto(s) ascendente(s), cuando las maniobras de fondeo de anclas se realicen para que la Embarcación trabaje en cercanías de estructuras fijas, así como verificar diariamente la posición de cada una de las boyas de las anclas con apoyo del remolcador, a intervalos de tiempo no mayor de seis horas en las maniobras de tendido o dragado de líneas y en intervalos de 12 horas cuando esta permanece posi-
PG-LO-OP-0001-2011 PÁG: 45 \ DE: 68 MAYO DE 201 1 VERSI~N: ( \ SEGUNDA
ELABORÓ
MANUAL DE PROCEDIMIENTOS DE LOGISTICA 1 ' PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR~EFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
ACTIVIDADES
cionada en determinada localización, durante el tiempo que permanezca la Embarcación con sus anclas fondeadas. Si por alguna causa es necesario reposicionar una o varias anclas de la Embarcación durante las maniobras de posicionamiento o cuando se encuentra en posición de trabajo, se procede de acuerdo a los puntos 7.3.3 y 7.3.4.
7.3.4 Levado de anclas de una 'Embarcación (Barco grúa, Barcaza o Plataforma Sémi Sumergible).
Para esta actividad, se debeiconsiderar lo que aplica de: puntos 9.Iíja1 ;9i9 'de los Anexos y del punto 2.3.6 numeral 4 incisos d) y f), además de contar con la.asistencia de un remolcador de popa abierta, para el manejo de anclas
7.3.4.1 Informar al Capitán la terminación de los trabajos para que se proceda a retirar la Embarcación de la estructura (plataforma) o ubicación, y se inicien las maniobras correspondientes para levar anclas.
7.3.4.2 Elaborar Conjuntamente con el Capitan, el plan de levado de anclas y determinar si es necesario un segundo remolcador de apoyo para evitar el contacto de los cables con los ductos sin enterrar. La tripulación encargada de la operación de los malacates (winches) de las anclas, mediante la acción de lascar y cobrar lentamente cada uno de los cables, retira la Embarcación de la plataforma cuidando la dirección de los cables, para evitar que hagan contacto con las estructuras marinas y ductos ascendentes.
7.3.4.3 Verificar que el Capitan de Remolcador recupere el orinque hasta tenerlo a plomo por su popa, y espere la instrucción de levar el ancla por parte del oficial de cubierta, esto previa autorización del Ingeniero Supervisor de Posicionamientos. Cuando se requiere, con apoyo del sistema de posicionamiento, se le indica al Capitán del remolcador el rumbo y distancia a las boyas de señalamiento de las anclas posicionadas, para su pronta localización.
EXPLORACION Y PRODUCCION O
7.3.4.4 Comprobar la posición del ancla con apoyo del programa de navegación y autorizar su levado. Cuando el Capitán del remolcador informa que el cable del ancla se encuentra a plomo, se registra en la computadora del programa de navegación su ubicación geográfica, corroborando al Capitán del remolcador que el ancla se encuentra en una zona libre de
' instalaciones marinas, por lo que se le autoriza iniciar el levado de la misma
MANUAL DE PROCEDIMIENTOS DE LOGISTICA 1 Y PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
ACTIVIDADES
7.3.4.5 Verificar que el Primer Oficial dirija las maniobras para recibir del remolcador el ancla, orinque y boya.
PAG: 46 DE: 68 VERSI~N: 1) SEGUNDA
R&ISÓ ING FE@ 4kQ4 BAUTISJA--
GERENCIA DE PERF. Y
MANTTO. DE POZOS
ACTIVOS Y10 DEPENDENCIAS
7.3.4.6 Solicitar al término de las.maniobras un reporte que contenga el plano con la posición final de la Embarcación y las coordenadas de la posición de cada una de las anclas al operador del programa de navegación, de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 inciso c), Estos documentos los firmarán: Capitán, Ingeniero, Supervisor de Posicionamientos , operador del programa de navegación y Supervisor de Obra, conservando cada uno de ellos una copia, para cualquier aclaración futura.
SUPERVISOR DE OBRA
En las áreas en donde existen arribos de ductos a plataforma, líneas regulares sin enterrar, válvulas submarinas o cruces de ductos con acolchonamiento o expuestos, la Embarcación cuenta con un segundo remolcador de apoyo con su respectivo equipo de posicionamiento global diferencial "DGPS" a bordo.
ING. SUPERVISOR
DE POSIC.
El segundo remolcador de apoyo se utiliza para suspender el cable de las anclas que lo requieran con un gancho (chaser o grillete) según convenga o para recuperar las boyas intermedias, que se colocan para evitar que el seno del cable del ancla dañe las instalaciones submarinas. Si por alguna causa es necesario reposicionar una o varias anclas de la Embarcación cuando se están efectuando
ACT,IVOS Y10 DEPENDENCIAS
SUPERVISOR DE OBRA
PAG: 47 11 DE: 68 VERSI~N : 1 SEGUNDA
&VISO ING F E L ~ \ + N BAUTISTA-
EXPlORAClON Y PRODUCCION O
ING. SUPERVISOR
DE POSIC.
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA V I U
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
GERENCIA DE PERF. Y
MANTTO. DE POZOS
ACTIVIDADES
maniobras de levado, se procede de acuerdo a los puntos: 7.3.3 y 7.3.4.
En estos casos se considera lo que aplica del punto 2.3.6 numeral 4 inciso d) y punt 9.10 de los Anexos. /
6' /
7.3.5.0 Verificar conjuntamente& co'n el Rig Mover todo lo relacionado con los remolcadores de apoyo y la$lataforma Auto Elevable, para dar cumplimiento al punto 2.3.6 numeral 4 inciso d) y punto 9.10 de los Anexos.
7.3.5.1 Proporcionar al Ingeniero Supervisor de Posicionamientos, la siguiente información:
a) Coordenadas Geográficas y UTM del pozo en la próxima localización a intervenir.
b) Mapeo con sonar de barrido lateral de la localización, realizado recientemente (no mayor a 90 dias mientras no exista algún otro evento) y10 posterior a la realización de trabajos de construcción en la localización.
c) Distribución de conductores ("Domino") en caso de ser una estructura.
d) Planos estructurales de la plataforma de PEMEX donde entrara el equipo de perforación, así como plano a escala con las dimensiones de la Plataforma Auto Elevable.
e). Plano de ductos actualizado de un radio mínimo de 1 kilómetro de la localización, validado por la GTDH de la región a la que pertenezca, contando con sus coordenadas tramo a tramo, tomadas con R.O.V.
La orientación adecuada para posicionar la plataforma acordada con el
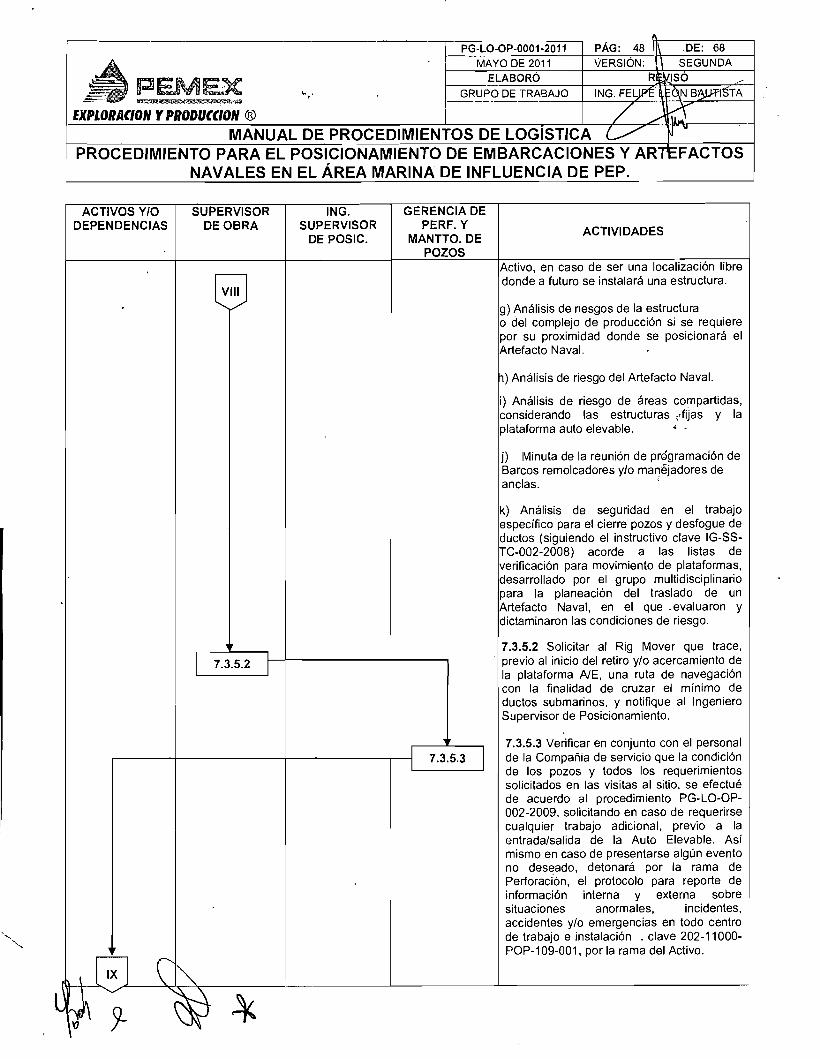
' MAYO DE 2011 ?/ERSIÓN: 1) SEGUNDA ELABORO R U S Ó
GRUPO DE 'TRABAJO ING. FEL* 4kq - - - - N BUXIS~ i2 , I I \I
EXPLORAClO# Y PRBDUCCIBIY O MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR- NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP. 1
ACTIVOS Y10 DEPENDENCIAS
SUPERVISOR DE OBRA
g) Análisis de riesgos de la estructura o del complejo de producción si se requiere por su proximidad donde se posicionará el Artefacto Naval.
ING. SUPERVISOR
DE POSIC.
l 1) Análisis de riesgo del Artefacto Naval.
i) Análisis de riesgo de áreas compartidas, considerando las estructuras ,rfijas y la plataforma auto elevable. 4
Activo, en caso de ser una localización libre donde a futuro se instalará una estructura.
GERENCIA DE PERF. Y
MANTTO. DE POZOS
j) lblinuta de la reunión de prógramación de Barcos remolcadores y10 man6jadores de anclas.
ACTIVIDADES
k) Análisis de seguridad en el trabajo específico para el cierre pozos y desfogue de ductos (siguiendo el instructivo clave IG-SS- TC-002-2008) acorde a las listas de verificación para movimiento de plataformas, desarrollado por el grupo multidisciplinario para la planeación del traslado de un Artefacto Naval, en el que .evaluaron y dictaminaron las condiciones de riesgo.
7.3.5.2 Solicitar al Rig Mover que trace, previo al inicio del retiro y10 acercamiento de la plataforma NE, una ruta de navegación con la finalidad de cruzar el mínimo de ductos submarinos, y notifique al Ingeniero Supervisor de Posicionamiento.
7.3.5.3 Verificar en conjunto con el personal de la Compañia de servicio que la condición de los pozos y todos los requerimientos solicitados en las visitas al sitio, se efectué de acuerdo al procedimiento PG-LO-OP- 002-2009, solicitando en caso de requerirse cualquier trabajo adicional, previo a la entradalsalida de la Auto Elevable. Así mismo en caso de presentarse algún evento no deseado, detonará por la rama de perforación, el protocolo para reporte de información interna y externa sobre situaciones anormales, incidentes, accidentes y10 emergencias en todo centro de trabajo e instalación : clave 202-1 1000- POP-109-001, por la rama del Activo.
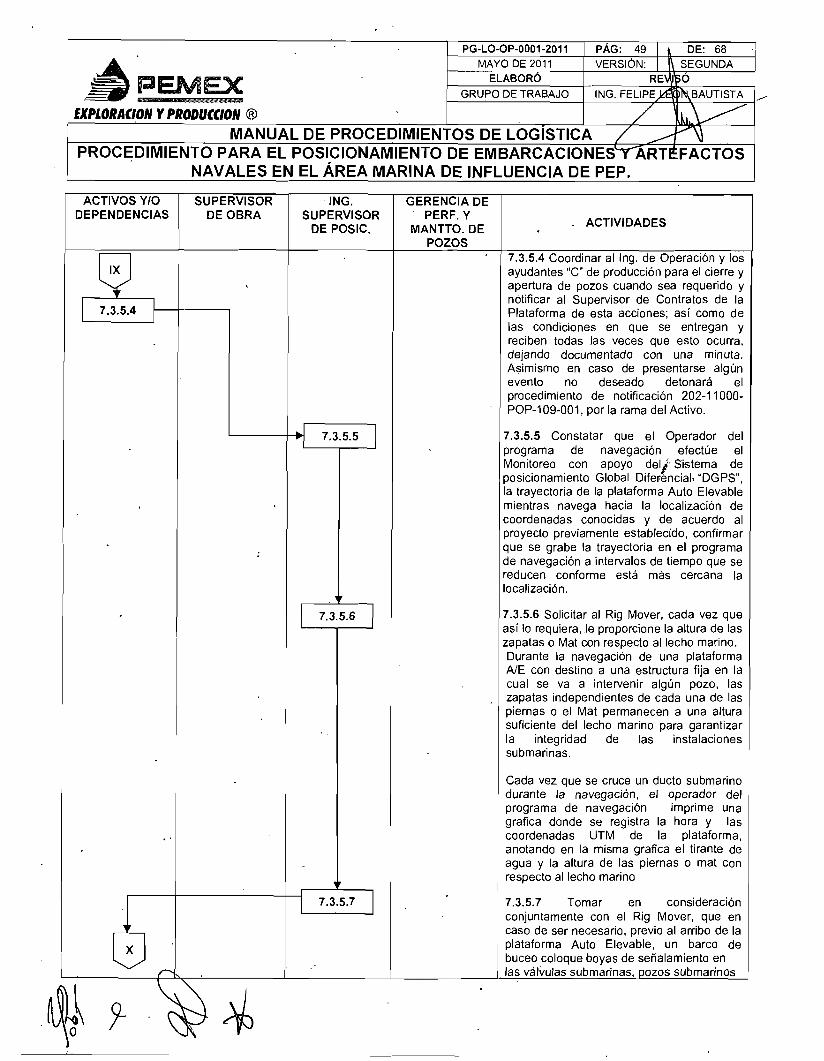
i EXPLORACION Y PRODUCCION O
ACTIVOS Y10 DEPENDENCIAS
. .
MANUAL DE PRocEDlMlENTos DE LOG~STICA /"' PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES~ART&FACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 PÁG: 49 1 \ DE: 68 MAYO DE 201 1
ELABORO GRUPO DE TRABAJO
.
SUPERVISOR DE OBRA
W ;,
ING. F E L I P E ~ B A U T I S T A
\y
caso de ser necesario, previo al arribo de la plataforma Auto Elevable, un barco de buceo coloque boyas de señalamiento en las válvulas submarinas, pozos submarinos
.,
. ING. SUPERVISOR
DE POSIC.
GERENCIA DE PERF. Y
MANTTO. DE POZOS
l
- ACTIVIDADES
7.3.5.4 Coordinar al Ing. de Operación y los ayudantes "C" de producción para el cierre y apertura de pozos cuando sea requerido y notificar al Supervisor de Contratos de la Plataforma de esta acciones; así como de las condiciones en que se entregan y reciben todas las veces que esto ocurra, dejando documentado con una minuta. Asimismo en caso de presentarse algún evento no deseado detonará el procedimiento de notificación 202-1 1000- POP-109-001, por la rama del Activo.
,
7.3.5.5
v 7.3.5.6
v 7.3.5.7
7.3.5.5 Constatar que el Operador del programa de navegación efectúe el IWonitoreo con apoyo d e p Sistema de posicionamiento Global Diferencial, "DGPS", la trayectoria de la plataforma Auto Elevable mientras navega hacia la localización de coordenadas conocidas y de acuerdo al proyecto previamente establecido, confirmar que se grabe la trayectoria en el programa de navegación a intervalos de tiempo que se reducen conforme está más cercana la localización.
7.3.5.6 Solicitar al Rig Mover, cada vez que así lo requiera,.le proporcione la altura de las zapatas o Mat con respecto al lecho marino. Durante la navegación de una plataforma AIE con destino a una estructura fija en la cual se va a intervenir algún pozo, las zapatas independientes de cada una de las piernas o el Mat permanecen a una altura suficiente del lecho marino para garantizar la integridad de las instalaciones submarinas.
Cada vez que se cruce un ducto submarino durante la navegación, el operador del programa de navegación imprime una grafica donde se registra la hora y las coordenadas UTlW de la plataforma, anotando en la misma grafica el tirante de agua y la altura de las piernas o mat con respecto al lecho marino
7.3.5.7 Tomar en consideración conjuntamente con el Rig Mover, que en
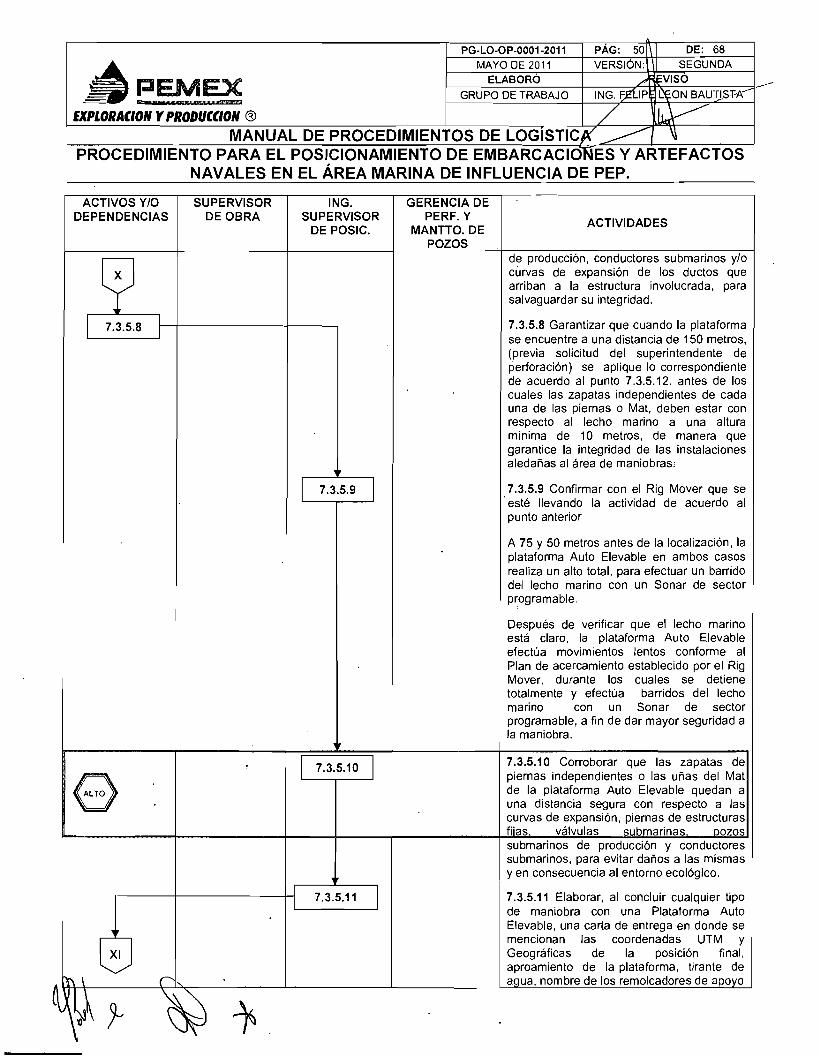
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
ACTIVOS Y10 DEPENDENCIAS
SUPERVISOR DE OBRA
ING. SUPERVISOR
DE POSIC.
GERENCIA DE PERF. Y
MANTTO. DE POZOS
ACTIVIDADES
de producción, conductores submarinos y10 curvas de expansión de los ductos que arriban a la estructura involucrada, para salvaguardar su integridad.
7.3.5.8 Garantizar que cuando la plataforma se encuentre a una distancia de 150 metros, (previa solicitud del superintendente de perforación) se aplique lo correspondiente de acuerdo al punto 7.3.5.12. antes de los cuales las zapatas independientes de cada una de las piernas o Mat, deben estar con respecto al lecho marino a una altura mínima de 10 metros, de manera que garantice la integridad de las instalaciones aledañas al área de maniobras:
7.3.5.9 Confirmar con el Rig Mover que se 'esté llevando la actividad de acuerdo al punto anterior
A 75 y 50 metros antes de la localización, la plataforma Auto Elevable en ambos casos realiza un alto total, para efectuar un barrido del lecho marino con un Sonar de sector programable.
Después de verificar que el lecho marino está claro, la plataforma Auto Elevable efectúa movimientos lentos conforme al Plan de acercamiento establecido por el Rig Mover, durante los cuales se detiene totalmente y efectúa barridos del lecho marino con un Sonar de sector programable, a fin de dar mayor seguridad a la maniobra.
submarinos de producción y conductores submarinos, para evitar daños a las mismas y en consecuencia al entorno ecológico.
7.3.5.1 1 Elaborar, al concluir cualquier tipo de maniobra con una Plataforma Auto Elevable, una carta de entrega en donde se mencionan las coordenadas UTM y Geográficas de la posición final, aproamiento de la plataforma, tirante de agua, nombre de los remolcadores de apoyo
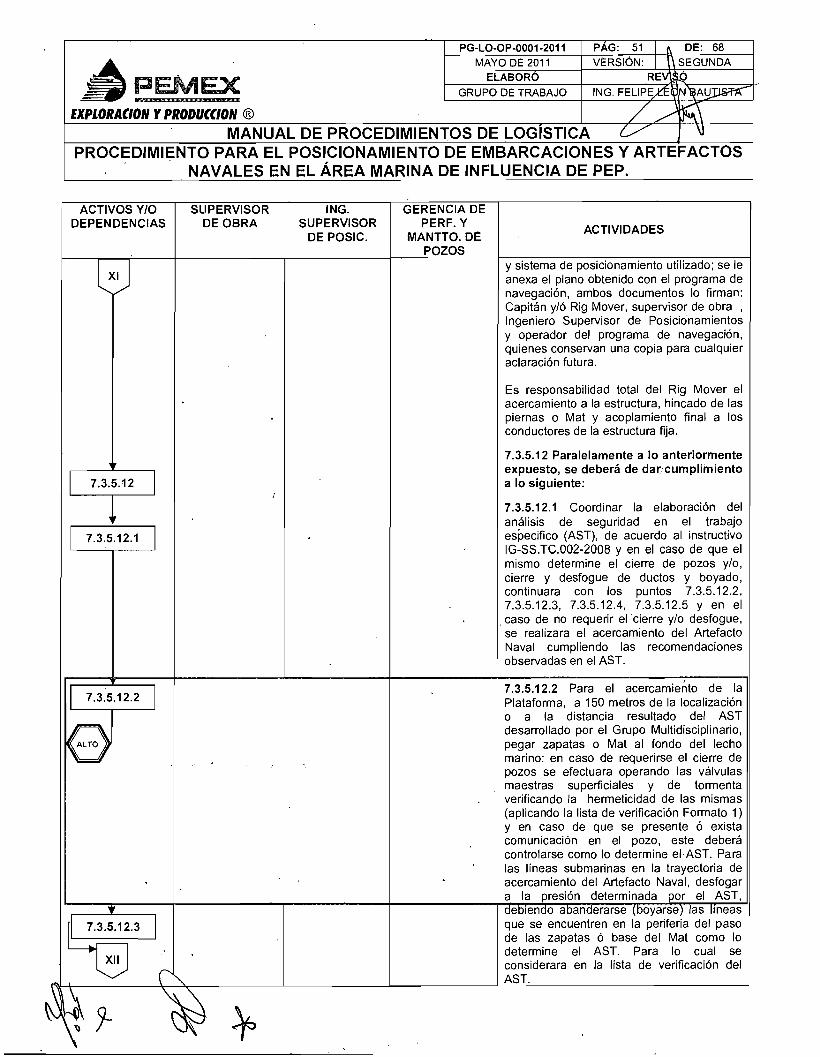
PG-LO-OP-0001-2011 PAG: 51 1 fi DE: 68 MAYO DE 201 1 1 VERSIÓN: 1 \\SEGUNDA
EXPLORACION Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS 1
documentos lo firman:
quienes conservan una copia para cualquier aclaración futura.
Es responsabilidad total del Rig Mover el cercamiento a la estructura, hincado de las iernas o Mat y acoplamiento final a los onductores de la estructura fija.
.3.5.12 Paralelamente a lo anteriormente xpuesto, se deberá de dar.cumplimiento
.3.5.12.1 Coordinar la elaboración del
determine el cierre de pozos ylo, y desfogue de ductos y boyado,
uara con los puntos 7.3.5.12.2, .12.3, 7.3.5.12.4, 7.3.5.12.5 y en el
cumpliendo las recomendaciones adas en el AST.
esarrollado por el Grupo Multidisciplinario,
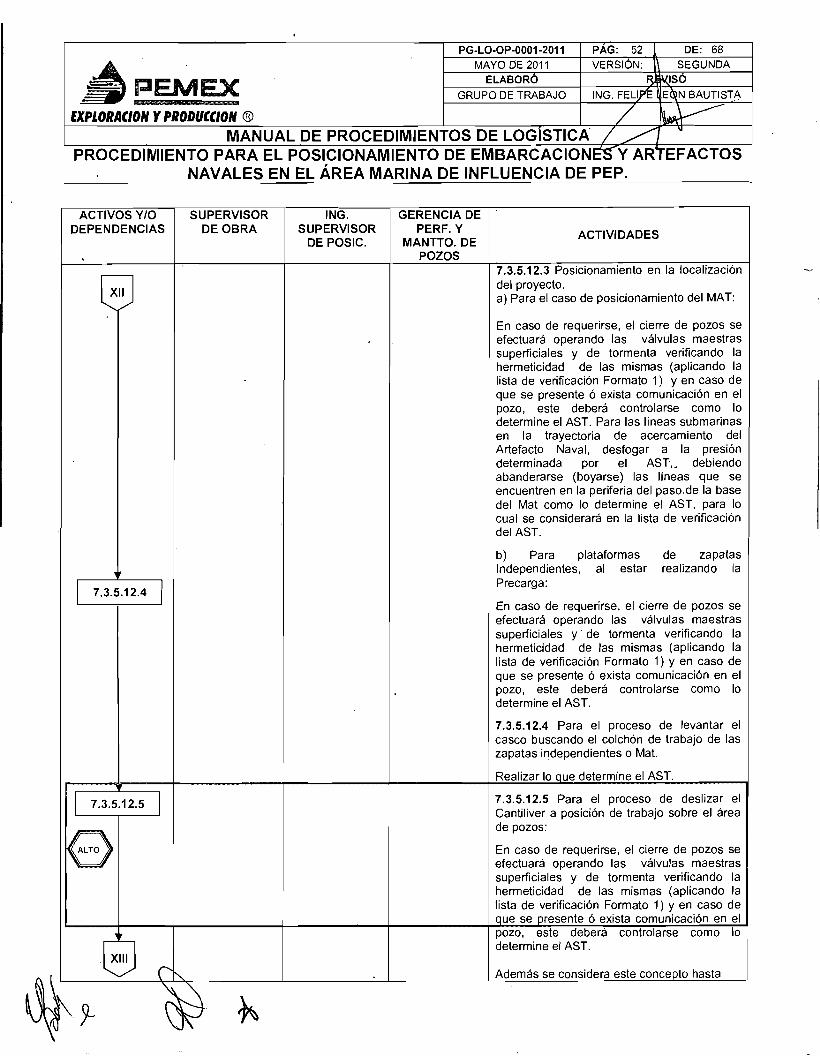
1 PG-LO-OP-0001-2011 1 PAG: 52 1 DE: 68
1 EXPlORICION Y PRODUCCION O - .
MAYO DE 201 1 1 VERSI~N: \\ SEGUNDA
PROCEDlRlllENTO PARA EL POSICIONAMIENTO DE EMBARCACION~%-Y AR~EFACTOS
ELABORÓ
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP. 1
&ISÓ
ACTIVOS Y10 DEPENDENCIAS
SUPERVISOR DE OBRA
ING. SllPERVlSOR
DE POSIC.
GERENCIA DE 1 PERF. Y
MANTTO. DE ACTIVIDADES
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST. Para las líneas submarinas en la trayectoria de acercamiento del Artefacto Naval, desfogar a la presión determinada por el AST,. debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso.de la base del Mat como lo determine el AST, para lo cual se considerará en la lista de verificación
POZOS
del AST.
7.3.5.12.3 Posicionamiento en la localización del proyecto. a) Para el caso de posicionamiento del MAT:
b) Para plataformas de zapatas Independientes, al estar realizando la Precarga:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y ' de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
7.3.5.12.4 Para el proceso de levantar el casco buscando el colchón de trabajo de las zapatas independientes o Mat.
Realizar lo que determine el AST.
7.3.5.12.5 Para el proceso de deslizar el Cantiliver a posición de trabajo sobre el área de pozos:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
Además se considera este concepto hasta
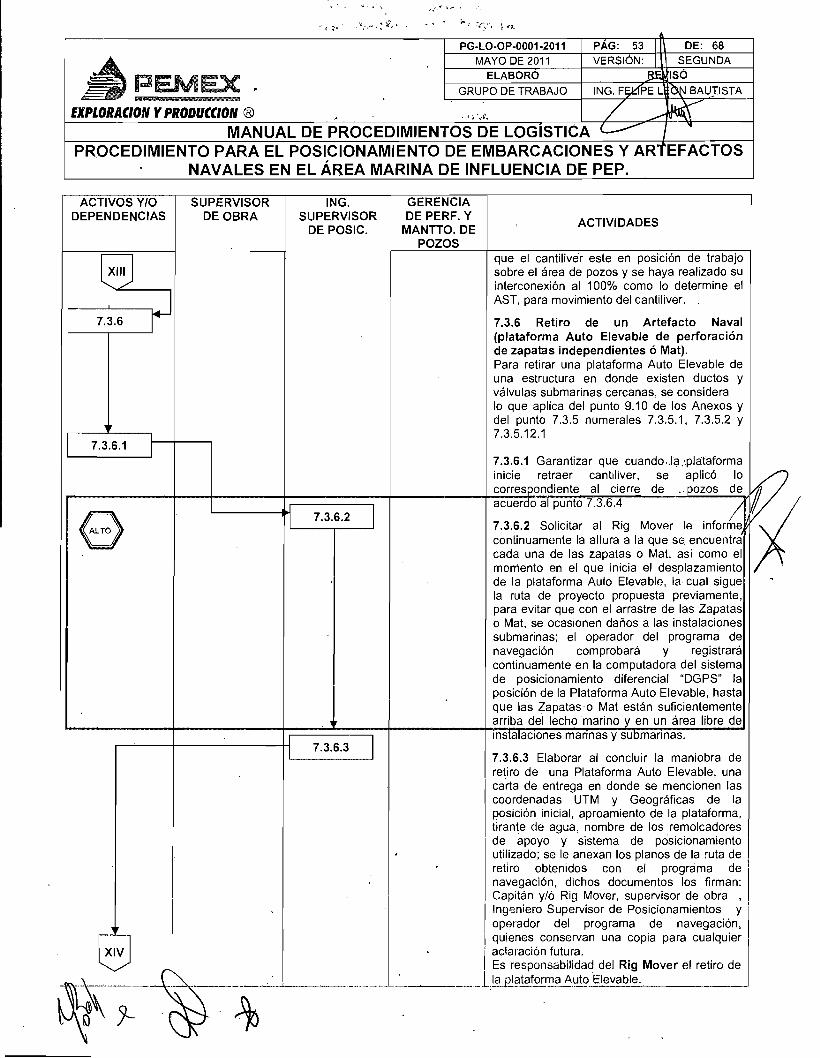
. , " . - . , " a , - . e.
, ;:" , .';.,..:S,. . - * ' b 7 - 4 " , , > 9 , '7.
t.
EXPLORACION Y PRODUCClOlY O + + .
MANUAL DE PROCEDIMIENTOS DE LOG~STICA C-F PROCEDIMIENTO PARA EL POSICIONAMIENTO DE ERllBARCAClONES Y AR~EFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
DEPENDENCIAS MANTTO. DE
ACTlVl DADES
7.3.6 Retiro de un Artefacto Naval (plataforma Auto Elevable de perforación de zapatas independientes ó Mat). Para retirar una plataforma Auto Elevable de una estructura en donde existen ductos y
.3.6.1 Garantizar que cuando..la,:plataforma
/
7.3.6.3 Elaborar al concluir la maniobra de retiro de una Plataforma Auto Elevable, una carta de entrega en donde se mencionen las coordenadas UTM y Geográficas de la posición inicial, aproamiento de la plataforma, tirante cle agua: nombre de los remolcadores
* d e apoyo y sistema de posicionamiento utilizado; se le anexan los planos de la ruta de retiro obtenidos con el programa de navegación, dichos documentos los firman: Capitán yló Rig Mover, supervisor de obra , Ingeniero Supervisor de Posicionamientos y
aclaración futura.
PÁG: 53 V E R S I ~ N :
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORO
GRUPO DE TRABAJO
, a , '.,t.
\ DE: 68 1) SEGUNDA
13@1só ING. F@PE ~ b b p BAUJISTA
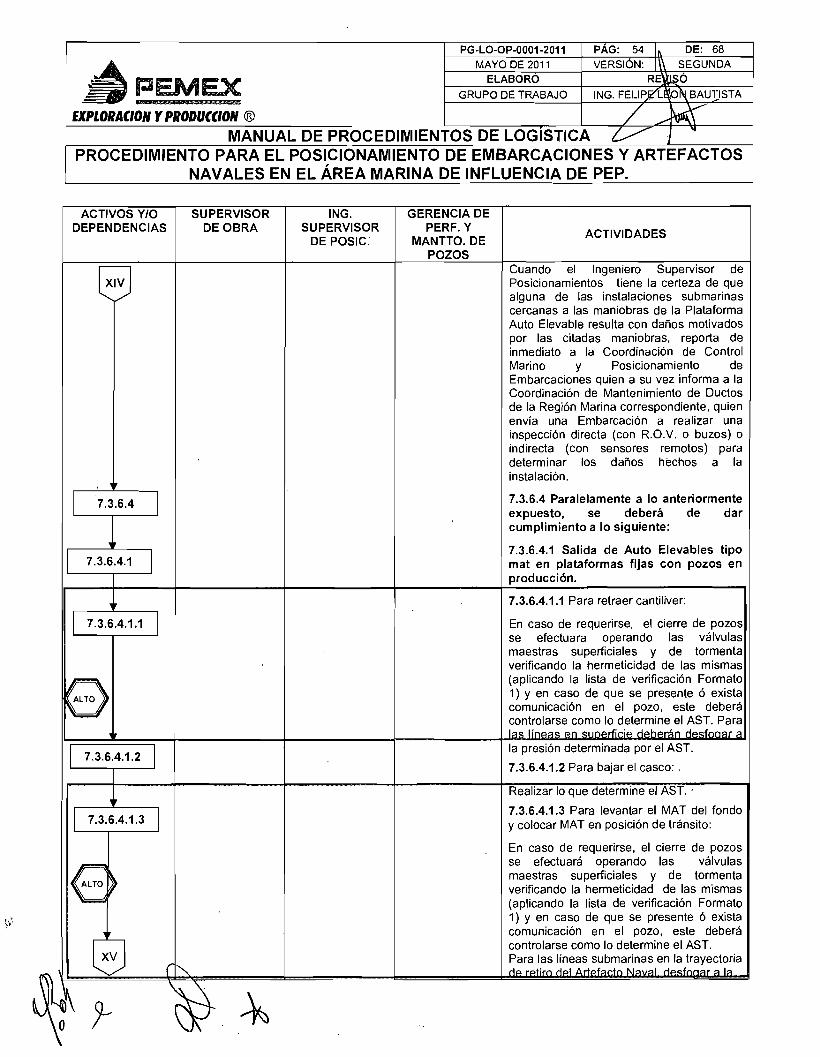
DEPENDENCIAS DE OBRA ING.
SUPERVISOR DE POSIC.'
DE: 68 \\ SEGUNDA
PG-LO-OP-0001-2011 MAYO DE 201 1
GERENCIA DE PERF. Y
MANTTO. DE POZOS
PÁG: 54 V E R S I ~ N
AC'I'IVIDADES
EXPLORACION Y PRODUCCION O
Cuando el Ingeniero Supervisor de Posicionamientos tiene la certeza de que alguna de las instalaciones submarinas cercanas a las maniobras de la Plataforma Auto Elevable resulta con daños motivados por las citadas maniobras, reporta de inmediato a la Coordinación de Control Marino y Posicionamiento de Embarcaciones quien a su vez informa a la Coordinación de Mantenimiento de Ductos de la Región Marina correspondiente, quien envía una Embarcación a realizar una inspección directa (con R.O.V. o buzos) o indirecta (con sensores remotos) para determinar los daños hechos a la instalación.
7.3.6.4 Paralelamente a lo anteriormente expuesto, se deberá de dar cumplimiento a lo siguiente:
MANUAL DE PROCEDlNllENTOS DE LOGlSTlCA u PROCEDIMIENTO PARA EL POSlClONANllENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
ELABOR~ GRUPO DE TRABAJO
7.3.6.4.1 Salida de Auto Elevables tipo mat en plataformas fijas con pozos en producción.
R W Ó ING. F E I - I P ~ ~ O @ B A U ~ S T A
7.3.6.4.1.1 Para retraer cantiliver:
En caso de requerirse, el cierre de pozos se efectuara operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente Ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST. Para
la presión determinada por el AST.
7.3.6.4.1.2 Para bajar el casco: .
Realizar lo que determine el AST. .
7.3.6.4.1.3 Para levantar el MAT del fondo y colocar MAT en posición de tránsito:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente Ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST. Para las líneas submarinas en la trayectoria
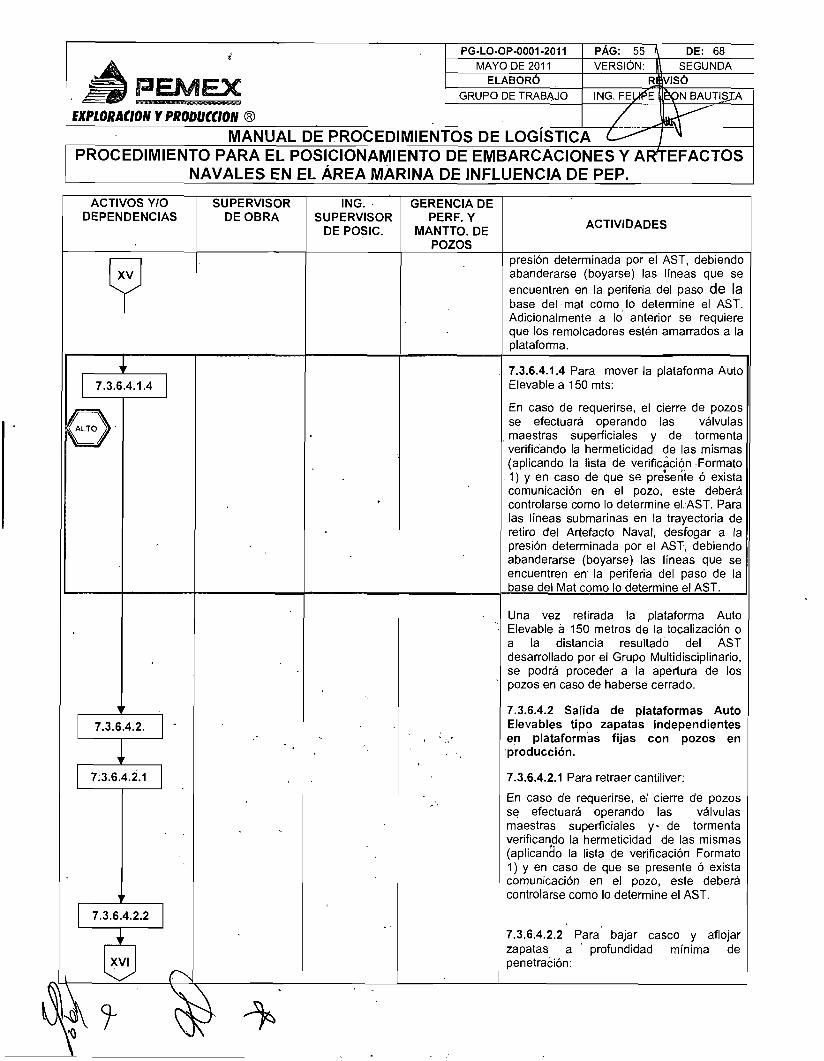
POZOS
F
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso de la base del mat como.10 determine el AST. Adicionalmente a lo anterior se requiere que los remolcadores estén amarrados a la a lata forma.
7.3.6.4.1.4 Para mover la plataforma Auto Elevable a 150 mts:
PAG: 55 h DE: 68 V E R S I ~ N [\ SEGUNDA
R$JVISÓ
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verifictación .Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el,AST. Para las líneas submarinas en la trayectoria de retiro del Artefacto Naval, desfogar a la presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se
ING FEHE EXPLORACION Y PRODUCCION O
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR~EFACTOS NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
Una vez retirada la plataforma Auto Elevable a 150 metros de la localización o a la distancia resultado del AST desarrollado por el Grupo Multidisciplinario, se podrá proceder a la apertura de los pozos en caso de haberse cerrado.
C,@N BAUTISJA
ACTIVOS Y10 DEPENDENCIAS
7.3.6.4.2 Salida de plataformas Auto Elevables tipo zapatas independientes en plataformas fijas con pozos en ,producción.
7.3.6.4.2.1 Para retraer cantitiver: l
SUPERVISOR DE OBRA
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y. de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST.
7.3.6.4.2.2 Para bajar casco y aflojar zapatas a ' profundidad mínima de penetración:
ING. SUPERVISOR
DE POSIC.
GERENCIA DE PERF. Y
MANTTO. DE ACTIVIDADES
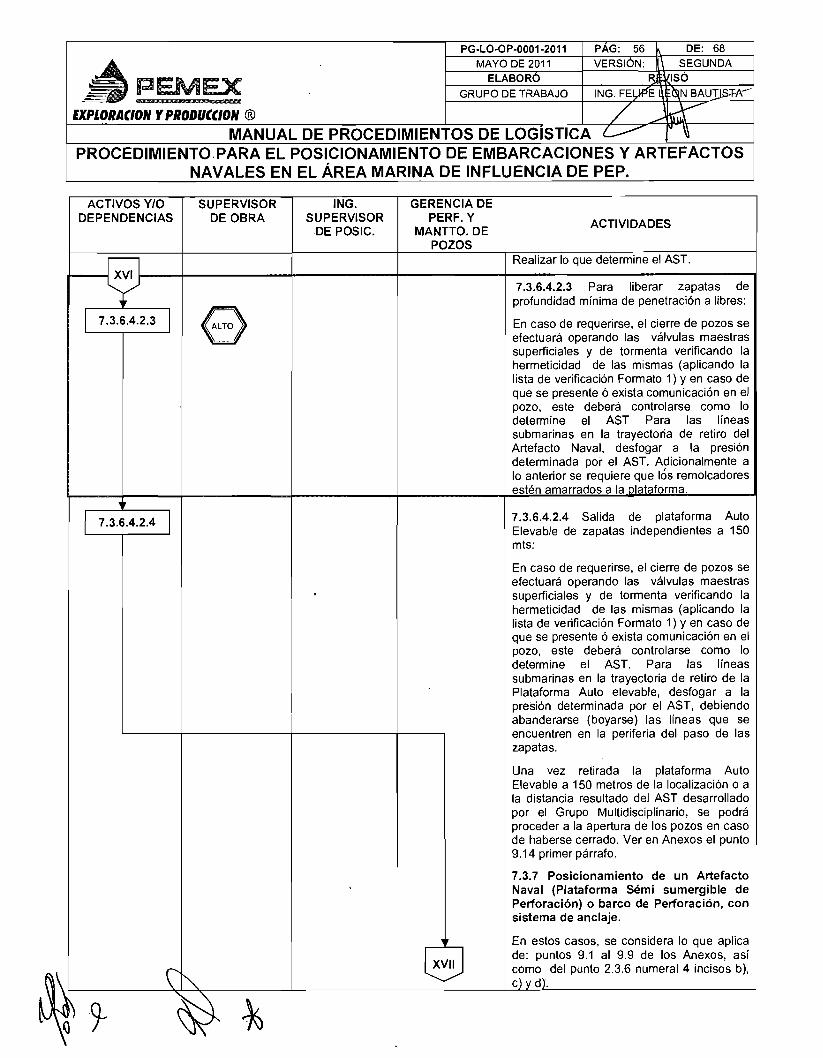
PG-LO-OP-0001-2011 1 PAG: 56 DE: 68 MAYO DE 201 1 1 VERSI~N: n \ SEGUNDA
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
7.3.6.4.2.4 f - l
Realizar lo que determine el AST.
7.3.6.4.2.3 Para liberar zapatas de profundidad mínima de penetración a libres:
GERENCIA DE PERF. Y
MANTTO. DE
ING. SUPERVISOR
DE POSIC.
ACTIVOS Y10 DEPENDENCIAS
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras
ACTIVIDADES
SUPERVISOR DE OBRA
superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente Ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST Para las líneas submarinas en la trayectoria de retiro del Artefacto Naval, desfogar a la presión determinada por el AST. Adicionalmente a lo anterior se requiere que los remolcadores estén amarrados a la plataforma.
7.3.6.4.2.4 Salida de plataforma Auto Elevable de zapatas independientes a 150 mts:
En caso de requerirse, el cierre de pozos se efectuará operando las válvulas maestras superficiales y de tormenta verificando la hermeticidad de las mismas (aplicando la lista de verificación Formato 1) y en caso de que se presente ó exista comunicación en el pozo, este deberá controlarse como lo determine el AST. Para las líneas submarinas en la trayectoria de retiro de la Plataforma Auto elevable, desfogar a la presión determinada por el AST, debiendo abanderarse (boyarse) las líneas que se encuentren en la periferia del paso de las zapatas.
Una vez retirada la plataforma Auto Elevable a 150 metros de la localización o a la distancia resultado del AST desarrollado por el Grupo Multidisciplinario, se podrá proceder a la apertura de los pozos en caso de haberse cerrado, Ver en Anexos el punto 9.14 primer párrafo.
7.3.7 Posicionamiento de un Artefacto Naval (Plataforma Sémi sumergible de Perforación) o barco de Perforación, con sistema de anclaje.
En estos casos, se considera lo que aplica de: puntos 9.1 al 9.9 de los Anexos, así como del punto 2.3.6 numeral 4 incisos b), C) y d).
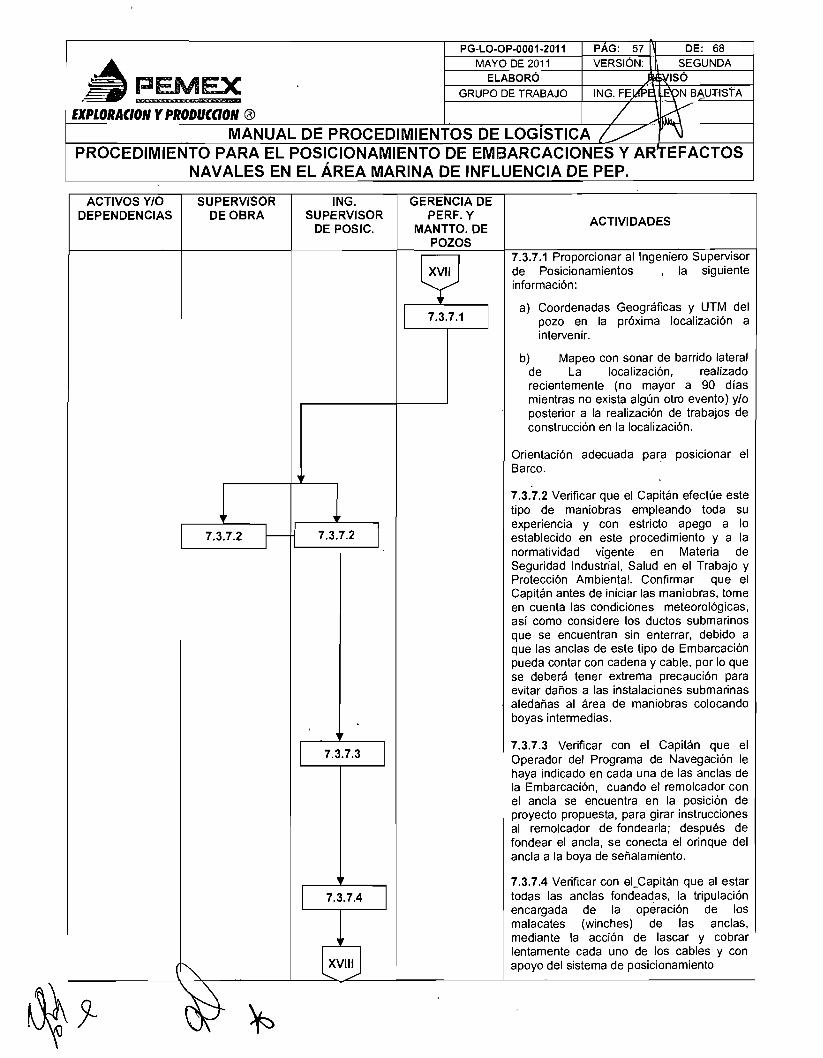
PG-LO-OP-0001-2011 PAG: 57 DE: 68 1 MAYO DE 201 1 V E R S I ~ N h SEGUNDA
GRUPO DE TRABAJO ING. FEJ&
EXPLORACION Y PRODUCCION O
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
7.3.7.1 Proporcionar al Ingeniero Supervisor de Posicionamientos , la siguiente información:
ACTIVOS Y10 DEPENDENCIAS
a) Coordenadas Geográficas y UTM del pozo en la próxima localización a intervenir.
b) Mapeo con sonar de barrido lateral de La localización, realizado recientemente (no mayor a 90 días mientras no exista algún otro evento) y10 posterior a la realización de trabajos de construcción en la localización.
SUPERVISOR DE OBRA
Orientación adecuada para posicionar el Barco.
7.3.7.2 Verificar que el Capitán efectúe este tipo de maniobras empleando toda su experiencia y con estricto apego a lo establecido en este procedimiento y a la normatividad vigente en Materia de Seguridad Industrial, Salud en el Trabajo y Protección Ambiental. Confirmar que el Capitán antes de iniciar las maniobras, tome en cuenta las condiciones meteorológicas, así como considere los ductos submarinos que se encuentran sin enterrar, debido a que las anclas de este tipo de Embarcación pueda contar con cadena y cable. por lo que se deberá tener extrema precaución para evitar daños a las instalaciones submarinas aledañas al área de maniobras colocando boyas intermedias.
ING. SLIPERVISOR
DE POSIC.
7.3.7.3 Verificar con el Capitán que el Operador del Programa de Navegación le haya indicado en cada una de las anclas de la Embarcación, cuando el remolcador con el ancla se encuentra en la posición de proyecto propuesta, para girar instrucciones al remolcador de fondearla; despues de fondear el ancla, se conecta el orinque del ancla a la boya de señalamiento.
GERENCIA DE PERF. Y
MANTTO. DE
7.3.7.4 Verificar con el-Capitán que al estar todas las anclas fondead.as, la tripulación encargada de la operación de los malacates (winches) de las anclas, mediante la acción de lascar y cobrar lentamente cada uno de los cables y con apoyo del sistema de posicionamiento
ACTIVIDADES
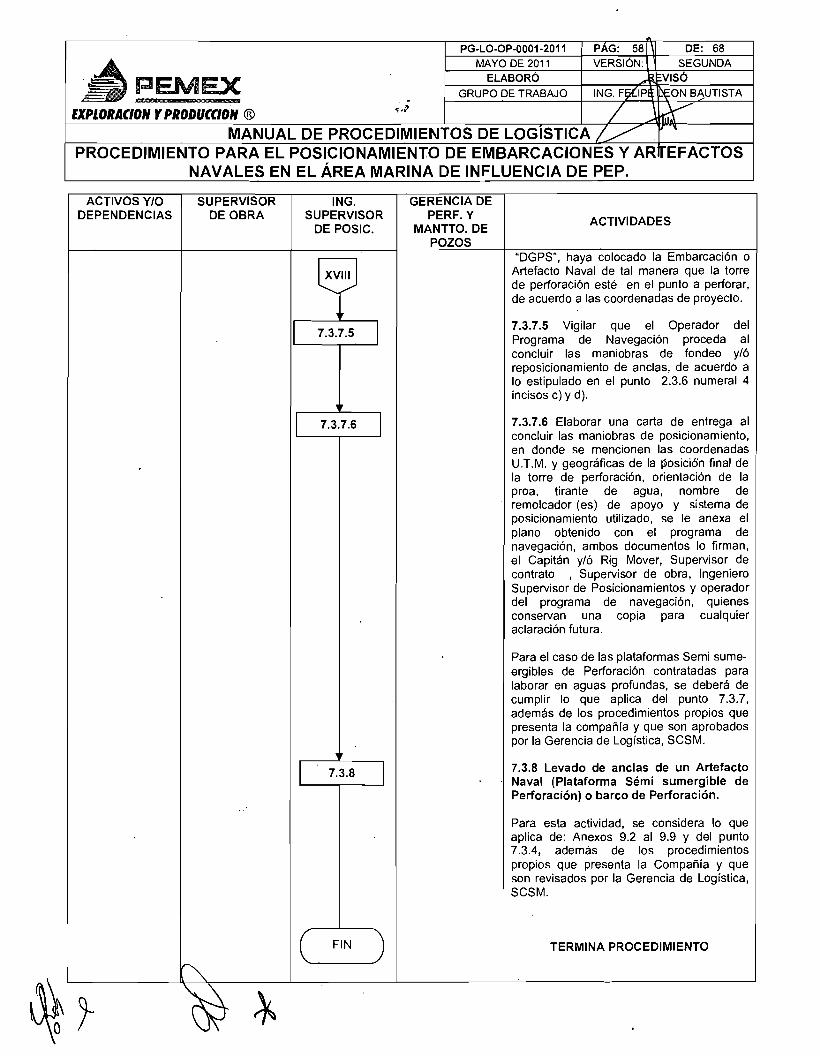
GERENCIA DE PERF. Y
MANTTO. DE POZOS
EXPLORACION Y PRODUCCION O 5 2
AC'TIVOS Y10 DEPENDENCIAS ACTIVIDADES I
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA // PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
E L A B O R ~ GRUPO DE TRABAJO
PAG: 58 V E R S I ~ N
Artefacto Naval de tal manera que la torre de perforación esté en el punto a perforar, de acuerdo a las coordenadas de proyecto.
\1 DE: 68 SEGUNDA
SUPERVISOR DE OBRA
7.3.7.5 Vigilar que el Operador del Programa de Navegación proceda al concluir las maniobras de fondeo yló reposicionamiento de anclas, de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 incisos c) y d).
,,#visó ING ~ $ 1 ~ 4 ~ O N BAUTISTA
ING. SUPERVISOR
DE POSIC.
7.3.7.6 Elaborar una carta de entrega al concluir las maniobras de posicionamiento, en donde se mencionen las coordenadas U.T.M. y geográficas de la posici6n final de la torre de perforación, orientación de la proa, tirante de agua, nombre de remolcador (es) de apoyo y sistema de posicionamiento utilizado, se le anexa el plano obtenido con el programa de navegación, ambos documentos lo firman, el Capitán y10 Rig Mover, Supervisor de contrato , Supervisor de obra, Ingeniero Supervisor de Posicionamientos y operador del programa de navegación, quienes conservan una copia para cualquier aclaración futura.
Para el caso de las plataformas Semi sume- ergibles de Perforación contratadas para laborar en aguas profundas, se deberá de cumplir lo que aplica del punto 7.3.7, además de los procedimientos propios que presenta la compañía y que son aprobados por la Gerencia de Logística, SCSM.
7.3.8 Levado de anclas de un Artefacto Naval (Plataforma Sémi sumergible de Perforación) o barco de Perforación.
Para esta actividad, se considera lo que aplica de: Anexos 9.2 al 9.9 y del punto 7.3.4, además de los procedimientos propios que presenta la Compañía y que son revisados por la Gerencia de Logística, SCSM.
TERMINA PROCEDIMIENTO
n PG-LO-OP-0001-2011 PÁG: 59 \ DE: 68
MAYO DE 201 1 VERSI~N: ,', SEGUNDA ELABORÓ A v i s ó
GRUPO DE TRABAJO I N G . ~ ~ - I P ~ CEQN BAU:I-ISTA
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS 1 NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP. 1
9. ANEXOS.
9.1 Distancias mínimas de las anclas y otros sistemas de Posicionamiento respecto a las tuberías submarinas.
a) Para fondear un ancla en posición tal que el cable y el ancla trabajan en sentido paralelo a un ducto submarino, se aplica el criterio y experiencia del lngeniero Supervisor de Posicionamientos, de tal manera que la distancia entre el ducto y el ancla es suficiente, para evitar daños a las instalaciones marinas involucradas en el área de fondeo.
b) Para fondearm ancla después de cruzar un ducto submarino, donde el cable y el ancla trabajan en sentido perpendicular al mismo, se procede de acuerdo a lo que aplica del inciso anterior.
c) Para la utilización de otros sistemas de posicionamiento que van fijos al lecho marino, sebprocede de acuerdo a las especificaciones técnicas del fabricante, respetando en todo momento lo estipulado en este procedimiento, a fin de salvaguardar la integridad física de las instalaciones submarinas y el entorno ecológico.
Los cables de las anclas pasan lo más retirado posible de la ubicación de válvulas y10 disparos submarinos, lingadas conformadas por bridas, pozos submarinos de producción, cruces de ductos submarinos que se encuentran sin enterrar y cruces habilitados por piezas tipo puente que se encuentran por arriba del lecho marino. Por ningún motivo se permite pasar los cables de las anclas, por encima de las instalaciones antes mencionadas.
9.2 Maniobras con anclas.
a) Las Embarcaciones que requieren posicionarse (fondear anclas) en los principales complejos, previo análisis y aprobación por parte del Ingeniero Supervisor de Posicionamientos deben contar con un mínimo de 6000 pies de longitud en sus cables de anclas o de 5000 pies cuando requieren posicionarse en plataformas satélites.
b) El Capitán de la Embarcación proporciona al lngeniero Supervisor de Posicionamientos cuando éste así lo requiere, información correspondiente a plano de construcción de la Embarcación y todo lo referente al sistema de anclaje.
I
c) La distancia mínima entre boyas de ancla de diferentes Embarcaciones deberá ser la suficiente para evitar que los orinques se enreden o los cables de sus anclas se crucen y a la vez dar espacio a los remolcadores para que maniobren libremente.
d) En el área de instalaciones marinas no se permite remolcar a una Embarcación utilizando los cables sus anclas como punto de apoyo, a menos que el ancla esté hecha firme sobre la cubierta del remolcador.
e) En ocasiones las Embarcaciones proponen fondear una de sus anclas mediante la acción de soltarla en la posición de proyecto mientras navega hacia el punto de trabajo. Este tipo de maniobra podrá realizarse únicamente en áreas en donde no se pougan en riesgo las instalaciones marinas a criterio y con la autorización por parte del lngeniero Supervisor de Posicionamientos . f) Para dar protección a los ductos submarinos la entrega y recepción de anclas del remolcador a la barcaza o viceversa, se efectúa en 'áreas libres de instalaciones submarinas.
EXPlORLIClON Y PRODUCCION O
g) Todos los remolcadores al realizar maniobras de rolado y10 levado de anclas en el área de influencia llevan sobre su cubierta y doblemente aseguradas dichas anclas.
h) Cuando se da el caso de que falta el orinque del ancla durante la maniobras de roladollevado se suspenden la maniobras, se checa la posición con equipo DGPS y si lo requiere el Supervisor de Posicionamientos, el Supervisor de Obra solicita una Embarcación de buceo para corroborar la posición real del ancla, en caso que el Supervisor de Posicionamientos lo indique, el,ancla se recupera ,utilizando los métodos señalados en el punto 9.3 incisos a), b) y c)
MANUAL DE PROCEDlRlllENTOS DE LOGlSTlCA PROCEDlNllENTO PARA EL POSlClONARlllENTO DE ENIBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
9.3 Levado de ancla que no cuenta con boya de señalamiento.
Para levar el ancla de un barco grúa, barcaza, plataforma semi sumergible o barco de perforación, que por alguna causa no cuenta con la boya de señalamiento; el Capitán de la Embarcación e Ingeniero Supervisor de Posicionamientos comprueban conjuntamente antes de iniciar la maniobra, que no existe ningún riesgo para la integridad de las instalaciones marinas y proceden de acuerdo a alguno de los métodos que a continuación se indican:
PÁG: 6 0 n 1 VERSIÓN.
a) Aproximar la Embarcación hasta dejar el ancla a pique e iniciar la maniobra de levado con su propio malacate (winche) (solo en áreas libres de instalaciones submarinas).
DE: 68
m
b) Colocar la pasteca en el cable del ancla y guiarlo con el remolcador de apoyo hasta la posición del ancla para realizar su levado.
R B S Ó ING FEHE ~kdy BAUTISTA
c) s e coloca el chaser en el cable del ancla y guiarlo con el remolcador de apoyo hasta la posición del ancla para realizar su levado.
Para cualquiera de las opciones indicadas, se considera lo establecido en el punto 7.3.1 numeral 1
Para los incisos b) y c) el ancla va en cubierta del remolcador y doblemente asegurada.
Al concluir las maniobras de recuperación de alguna de las anclas, el operador del programa de navegación procede de acuerdo a lo estipulado en el punto 2.3.6 numeral 4 inciso c).
9.4 Garreo de un ancla.
En caso de presentarse un garreo de ancla, se procederá de la forma siguiente:
PG-LO-OP-0001-2011 1 PAG: 61 fi 1 DE: 68 MAYO DE 201 1 I VERSI~N: \\I SEGUNDA
a) Una vez que el operador del programa de navegación y el lngeniero Supervisor de Posicionamientos determinan mediante el sistema de posicionamiento global diferencial "DGPS" que el ancla garreó de su posición original de fondeo y que se encuentra cercana a un ducto o encima de él, se da aviso de inmediato al Capitán de la Embarcación quien gira instrucciones al remolcador de no levar el ancla, ésta situación se reporta también al Supervisor de obra, superintendente y10 Supervisor de obra de compañía, control y tráfico marítimo, superintendente del complejo al cual pertenece el ducto involucrado y a la gerencia de transporte y distribución de hidrocarburos (GTDH) de la zona marina correspondiente en Cd. del Carmen, Campeche. En seguida el operador del programa de navegación procede a imprimir un plano que muestra las instalaciones marinas y la posición actual del ancla con sus coordenadas UTM y geográficas proporcionándolas al lngeniero Supervisor de Posicionamientos.
b) Siempre que se presente esta situación, el Supervisor de obra a bordo, realiza los trámites necesarios para que se efectúe una inspección indirecta con instrumentos o directa con buceo, para determinar si existen daños, así como establecer la posición exacta del ancla con respecto al ducto.
c) De acuerdo a los resultados obtenidos de la inspección indirecta. o directa, el Capitán de la Embarcación, lngeniero Supervisor de Posicionamientos, Supervisor de obra y superviso; de obra de compañía, determinan la forma más conveniente de recuperar el ancla, sin poner en riesgo las instalaciones marinas involucradas.
d) El Supervisor de obra a bordo de la Embarcación elabora un acta de protesta con todos los pormenores, responsabilizando a la compañía que tenga el contrato firmado con PEP y operadora de la Embarcación por los daños resultantes a las instalaciones marinas .
e) Para el caso que exista una contingencia el lngeniero Supervisor de Posicionamientos determina el procedimiento a seguir.
. 9.5 Separación del cable de un ancla de su respectivo tambor del malacate (winche).
Cuando el cable de un ancla fondeada se separa del tambor del malacate (winche) de la Embarcación, el cable queda depositado sobre el lecho marino y ductos submarinos que se encuentran en esa zona, por tal motivo no es'arrastrado. EL Capitán de la Embarcación elabora un procedimiento por escrito para las maniobras de recuperación del cable y el lngeniero Supervisor de Posicionamientos evalúa y en caso de que no poner en riesgo las instalaciones marinas y submarinas de P.E.P. lo aprueba.
9.6 Ruptura del cable de un ancla.
Previa autorización del lngeniero Supervisor de Posicionamientos , el remolcador leva el ancla, la sube a su cubierta y la asegura. Una vez asegurada, se desconecta de su cable, para que este mismo se conecte al extremo del orinque del tambor del malacate (winche). El Capitán del remolcador inicia a cobrar el cable, adujándolo en el tambor de su malacate (winche) hasta llegar a la Embarcación, para
'acoderarse a ésta y hacer entrega del orinque, ancla y cable recuperado.
9.7 Cruce de cables de anclas sobre tuberías submarinas.
a) Cuando los cables de las anclas de las Embarcaciones cruzan los ductos submarinos, las anclas deben situarse @a,cubierta del remolcador y asegurarse.
EXPLORACION Y PRODUCCION O
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
b) Siempre que los cables de las anclas de las Embarcaciones cruzan ductos submarinos sin enterrar o expuestos en el lecho marino, el lngeniero Supervisor de Posicionamientos exigirá al Capitán de la Embarcación, se protejan los citados ductos mediante el uso de boyas intermedias, o Colchacretos reforzados en sus partes superior e inferior, con una. matriz de superficie plástica (Rubber Mat), para evitar contacto con dichas instalaciones submarinas, quedando además protegidos los citados cables.
9.8 Ausencia del Iugeniero Supervisor de Posicionamientos.
La ausencia del lngeniero Supervisor de Posicionamientos durante las maniobras de fondeo y levado de anclas o posicionamiento de cualquier Embarcación, no exime al Capitán, Rig Mover o al operador del programa de navegación de la responsabilidad en algún incidente y10 suceso marítimo derivado del incumplimiento de este procedimiento. .
9.9 Destorcedores en conexión cable con ancla.
Todas las anclas de las Embarcaciones que trabajan en el área de plataformas marinas, (deben contar con destorcedor en la conexión con su cable de trabajo.
9.10 Boyado de Ductos que arriban a instalaciones fijas.
Previo al arribo o retiro de una Embarcación o Artefacto Naval a una instalación fija con arribo de ductos submarinos, se deberán boyar éstos, y para el caso de que el tirante de agua no lo permita, se utilizaran dispositivos electrónicos que permitan conocer la ubicación de estas instalaciones submarinas.
9.11 Consideraciones mínimas que debe tomar en cuenta el lngeniero Supervisor de Posicionamientos a bordo de una Embarcación de Posicionamiento Dinámico, que pretende laborar al costado de una instalación fija.
9.1 1.1 Todas las Embarcaciones de posicionamiento dinámico que pretendan realizar trabajos de buceo, mantenimiento, construcción, tendido de tubería, habitacionales (floteles), y pretendan estar al costado de una instalación de PEMEX EXPLORACIÓIV Y PRODUCCIÓN deberán ser por lo menos clase DP 2 (ONII) especificado en certificado de clase, casco y maquinaria.
9.1 1.2 En las Embarcaciones con posicionamiento dinámico Clase 2 y 3 (Sistema redundante), ninguna falla simple y10 falla imprevista resultará en perdida de posición.
Una falla simple es cualquier deficiencia de un sistema de referencia o sensor y una falla simple incluye un acto inadvertido por cualquier persona a bordo de la Embarcación.
Una falla imprevista es cuando hay deficiencia en uno de los componentes del sistema de control del DP (consolas, UPS, computadoras) la cual no deberá provocar una actividad no deseada en los propulsores (thrusters).
PG-LO-OP-0001-2011 MAYO DE 201 I
ELABORÓ GRUPO DE TRABAJO
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PÁG: 63 DE: 68 VERSIÓN: a \ SEGUNDA
r&qqó ING. F E ~ E @o& BAUTISTA ,
EXPLORACION Y PRODUCCION @
9.1 1.3 Todos los equipos que proveen redundancia en un sistema de posicionamiento dinámico como los sistemas de referencia para posicionarriiento dinámico, sensores, deberán estar en línea o a inmediata disposición, de la misma maneia todos los equipos que directamente o indirectamente operan en una Embarcación para mantener la posición dinámica deberán estar funcionando correctamente y deberán ser usados conforme a la redundancia exigida por la.OMI y considerando la clase DP de la Embarcación,
\ 4
9.1 1.4 Toda Embarcación de Posicionamiento dinámico deberá contar con fuentes ininterrumpidas de poder (UPS) que permiten la continuidad de la operación del sistema de control del posicionamiento dinámico, incluyendo las impresoras del sistema de alarmas.
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y AR~EFACTOS
9.1 1.5 Los sistemas considerados para el manejo de energía abordo (manuales y10 automáticos) de la Embarcación, que tenga que ver con la redundancia del sistema de posicionamiento dinámico, deberán ser monitoreados en su funcionamiento de manera constante durante las 24 hrs, observando su buena operación en todo momento.
9.1 1.6 Las Embarcaciones de posicionamiento dinámico clase 2 y 3 (OMI), deberán posi~ionarse para realizar el trabajo, con al menos 3 sistemas referenciales con principios diferentes cada uno. Tal como lo indican las directrices emitidas por la OMI para los Buques Provistos de Sistemas de Posicionamiento Dinámico, apartado 3.4.3 puntos 2 y 3.
9.1 1.7 Todos aquellos Capitanes y Operadores de posicionamiento dinámico que laboren en una Embarcación con Sistema de Posicionamiento Dinámico; independientemente si esa Embarcación tiene o no contrato con PENIEX EXPLORACIÓN Y PRODUCCIÓN y10 clase D.P. deben contar con licencia para operar dicho sistema.
9.1 1.8 El sistema DP clase 2 o 3 (OIVll) de una Embarcación deberá tener un estudio completo y actualizado de Análisis de los efectos de posibles fallas-FMEA- y el personal de abordo deberá estar familiarizado con este análisis. Dicho análisis debera considerar mínimo lo siguiente:
Perdida imprevista de componentes importantes del equipo. Perdida imprevista o secuencia1 de algunas partes del equipo con una conexión común. Fallas en el sistema de control, su método de detección y aislamiento. Las fallas que pueden pasar inadvertidas hasta que otra falla ocurra. Que reacciones y respuestas del operador es esperada. ' Actualizar el FMEA cada vez que se efectúe una modificación a la Embarcación. Demostrar el potencial del sistema DP al departamento de Inspección de Control Marino y10 al
departamento de Posicionamiento de Embarcaciones. Cada vez que inicie un contrato, se debera programar la repetición de las pruebas anuales del
sistema de posicionamiento dinámico.
. 9.1 1.9 Toda Embarcación con sistema de posicionamiento dinámico (DP) deben tener abordo su manual de operación diseñado exclusivamente para su sistema y modos de operación de los armadores u operadores del mismo, además de este deben contar con un manual procedimientos de operación, dicho manual abarcaráp.dos los trabajos para los que la Embarcación está diseñada y10 pueda ser usada, en
estos procedimientos se deberán establecer límites para una operación segura en posición DP y serán determinadas por la localización, tipo de tarea a realizar, también debe incluir procedimientos de emergencia donde se hace del conocimiento de las posibles fallas previstas en el FMEA, además cada nuevo lugar de operación de un buque DP puede representar situaciones muy especificas, por lo que adicional al manual de procedimientos de operación y manual de operación, si el documento general no contempla o no satisface el plan de seguridad que exige el estar al costado de una instalación, deberá realizarse un documento para el proyecto en particular(procedimiento específico).
9.11.10 Toda Embarcación de Posicionamiento Dinámico, debe implementar formatos tipo lista de verificación, en el que deben estar considerados todos los equipos que generen redundancia al sistema de posicionamiento tanto en el Departamento de máquinas como de cubierta, verificaciones al cambio de turno y previas a cada maniobra de acercamiento Ó alejamiento etc.
9.11.11 lmplementar un formato de procedimiento a seguir en caso de Black-Out y10 perdida de propulsores, e incluirlo en el programa de zafarranchos de seguridad de la Embarcación DP, debiendo considerar de manera muy puntual la falla del sistema de posicionamiento dinámico por Black Out, el tiempo que se tarda en restablecer el posicionamiento dinámico después de un Black out y todo personal efectuará las practicas por lo menos una vez al mes. Dichos zafarranchos deberán ser en el idioma apropiado dependiendo la nacionalidad de la tripulación.
9.1 1.12 Los operadores de DP y de la sala de control de máquinas de la Embarcación deberán contar con toda la información adecuada sobre la operación que se está llevando a cabo y, en todo momento se deberá mantener un sistema de guardia permanente por parte de operadores certificados tanto en el sistema de operación del DP como en la sala de control de máquinas de la Embarcación.
9.1 1.13 Al costado de una instalación marina, cualquiera que esta sea, se deberá en todo momento mantener un adecuado control y un remanente de energía disponible en la .Embarcación DP, de tal manera que permita evitar la pérdida de posición.
9.11.14 Para estar al costado de una instalación marina, cualquiera que esta sea, la Embarcación de posicionamiento dinámico que realice trabajos de buceo, mantenimiento, construcción, tendido de tubería, habitacionales (floteles). Deberán trabajar en contra del viento y10 corriente en proximidades de plataformas u obstrucciones. En caso de no haber posición de trabajo en la condición antes mencionada, la Embarcación de posicionamiento dinámico deberá informar a Control Marino quien evaluará y dará autorización cuando así lo permitan las condiciones.
9.11.15 Al estar al costado de una instalación marina, cualquiera que esta sea, los mantenimientos, modificaciones y servicios que sean llevados a cabo a bordo de una Embarcación de posicionamiento dinámico, no deberán provocar la pérdida de la redundancia que por clase le aplica al DP, en consecuencia no deberán provocar la pérdida de posición. En caso de que exista el riesgo antes mencionado, la Embarcación de posicionamiento dinámico deberá comunicar a Control Marino para que le sea proporcionada una posición segura o donde la Embarcación disponga fuera del área de plataformas.
9.11.16 Todas las Embarcaciones de posicionamiento dinámico que realicen trabajos de buceo, mantenimiento, qnstrucción, tendido de tubería, habitacionales (floteles), deberán mostrar las bs ?,
verificaciones y10 calibraciones de todos los interruptores de los transformadores de la grúa principal, propulsores y moto generadores principales.
9.1 1.1 7 Todas las Embarcaciones de posicionamiento dinámico que realicen trabajos de buceo, mantenimiento, construcción, tendido de tubería, habitacionales (.l'loteles), que realicen izajes de gran peso y10 volumen, deberán de demostrar que realizan las inspecciones visuales y pruebas de aislamiento (meggeos) a transformadores de la grúa, así como a los generadores principales y motores eléctricos de la Embarcación.
9.11.18 Todas las Embarcaciones de posicionamiento dinámico que realicen trabajos de buceo, mantenimiento, construcción, tendido de tubería, habitacionales (floteles), deberán de demostrar que conectan las máquinas de soldar a un interruptor adecuadamente calibrado y alimentado por líneas que no afectan a sistemas principales de alimentación del sistema de propulsión. Lo anterior avalado por la Sociedad Clasificadora correspondiente.
9.1 1.19 Todas las Embarcaciones de posicionamiento dinámico que realicen trabajos de buceo, mantenimiento, construcción, tendido de tubería, habitacionales (floteles), no deberán realizar mantenimientos a moto generadores principales, cuando el sistema eléctrico se encuentre con una gran demanda y la Embarcación se encuentre posicionada en cercanías de alguna instalación.
9.1 1.20 Todas las Embarcaciones de posicionamiento dinámico deberán incluir dentro de su programa de mantenimiento la revisión y pruebas de los reguladores de voltaje automático (AVR), de acuerdo a las recomendaciones del fabricante.
9.1 1.21 Todas las Embarcaciones de posicionamiento dinámico que pretenden operar al costado de una instalación marina, mantienen en todo momento compensadas las capacidades de generación eléctrica, previendo y evitando cualquier posibilidad de motorización que dañe sus equipos y esto desencadene en un Black Out.
Independientemente de las recomendaciones aquí presentadas, las Embarcaciones de Posicionamiento Dinámico que laboran en las áreas marinas de influencia tienen la obligación de cumplir con todas las regulaciones que le son aplicables de acuerdo a IMO; IlVlCA y la Sociedad Clasificadora que representa a la Embarcación.
9.12.- Orientación y posición de conductores de perforación en uina estructura fija.
9.12.1.- Los Activos o Gerencias se aseguran que la colocación de los conductores de los pozos a perforar, se orienten de acuerdo a los vientos y corrientes dominantes, de tal suerte que el equipo móvil de perforación que se encuentre perforando en esa localización, permanezca en una posición segura en caso de incendio o fuga de gas en la estructura fija.
9.12.2.- Las áreas encargadas de proyectar los ductos submarinos a construir, toman en cuenta el punto anterior, a fin de no obstruir las áreas donde a futuro se colocaran los conductores, y a la vez faciliten el acercamiento del equipo móvil de perforación a la estructura fija, sin poner en riesgo los ductos
así como el entorno ecológico.
9.13.- Facilidades para el buen desarrollo de las funciones del lngeniero Supervisor de Posicionamientos.
)i
Las áreas que solicitan el apoyo con un lngeniero Supervisor de Posicionamientos, se aseguran que sus representantes de contrato a bordo de las Embarcaciones o Artefactos Navales, le proporcionan todas las facilidades al citado profesionista para el buen desarrollo de sus funciones, dentro de las cuales incluye el uso de la intranet de PEMEX, la línea telefónica (en el caso de contar con una) y una cabina digna, en condiciones similares que la que ocupa el mismo representante antes citado, lo anterior en virtud de la naturaleza de las labores que desarrolla el lngeniero Supervisor de Posicionamientos, durante las maniobras objeto de su presencia a bordo, para las cuales no se cuenta con un horario definido para la realización de las mismas.
,
EXPLORACION Y PRODUCCION O
9.14.- Factores a considerar en las maniobras con Plataformas Auto Elevables.
Las maniobras de entrada o retiro de las plataformas Auto Elevables a estructuras fijas con pozos en producción, se realizan con condiciones meteorológicas favorables y luz diúrna.
MANUAL DE PROCEDIMIENTOS DE LOGlSTlCA ' PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABORÓ GRUPO DE TRABAJO
Cuando sea requerido el cierre de pozos, los Activos entregaran al final de esta actividad la documentación comprobatoria, indicando la fecha, hora y el responsable de la ejecución del mismo.
PÁG: 66 1 1) DE: 68 VERSI~N: 1 L~EGUNDA
R E V ~ ING. F E I - I P ~ ~ E O \I NUTISTA-
..
Las recomendaciones del AST (Análisis de Seguridad del Trabajo) emitidas por el grupo de trabajo multidisciplinario conformado por Activos y10 Dependencias de PEP, Arrendador o Proveedor de Servicios, deberán ser acatadas por todas las partes así como de la Aseguradora del Arrendador o Proveedor de Servicios, en virtud de que el AST es una buena práctica aceptada a nivel internacional, la cual está encaminada a identificar los peligros y administrar los posibles riesgos, salvaguardando en todo momento el personal, las instalaciones y el medio ambiente.

FORMATO 1.- Formato de verificación de Sistemas de seguridad de pozos y líneas de proceso en plataformas satélites.
@=3F flS7.4 M W R K C C A C ~ ~ ~ ~ Y M SlS7¿MAS M S¿CUhWAU M POZOS rf;4¿.4~ M PUUC¿SO¿HPfA7A~UUAlAS ~ . 4 7 & f l 7 ¿ ~
PÁG: 67 1 \ DE: 68 VERSION: 1 \\ SEGUNDA
R E # S ~ ING F E I - I P ~ N BAUTISTA
l i
EXPLORAQON Y PRODUCCION O MANUAL DE PROCEDIMIENTOS DE LOGISTICA
PROCEDIMIENTO PARA EL POSICIONAMIENTO DE EMBARCACIONES Y ARTEFACTOS NAVALES EN EL ÁREA MARINA DE INFLLIENCIA DE PEP.
PG-LO-OP-0001-2011 MAYO DE 201 1
ELABOR~
GRUPO DE TRABAJO
\ SOV'S ISALIDA DE ACEITE (LLEGAOA DE ACEITE LLEGADA OE BN JSALIDA DE GAS
!LLEGADA DEGAS !ENTRADA DE hlEZCLA AL SEPARADOR
%?:'. . ESD OPERA < k&v;,
i - - ! . - ." . -. .. I AtUOAIdTE " C DE PRODUCCION S ING. DE INSTRUMENTOS ; 1 11dG. OPERACI~N DE POZOS , - - - - - - - - - - - - - - - - - - - - - - - - - . - . - - - - - - - . - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - . - - - - - - - - - - - - - - - - - - .
r\ 1 . ,
--- - - - - , - !ACOMULADOR (NIVEL Z) !RED TAPONES FUSIBLES ;SISTEMA DE SUMIIJISTRO PRESION NEUI {SISTEMA DE SUMINISTRO PRESION HlDF
!ESO EN AREA OE MUELLES
%!SI>
NIVEL [A]:
PRESI~N= PRES16N.
I I : I l
m e NO
OBSERVACIOIJES GENERALES
1 PG-LO-OP-0001-2011 1 PAG: 68 (\ DE: 68 MAYO DE 201 1 VERSIÓN: I(\ SEGUNDA
ELABORO
MANUAL DE PROCEDIMIENTOS DE LOG~STICA/ / 1 v - PROCEDIMIENTO PARA EL POSICIONAMIENTO DE E M B A R C A C I O ~ S Y AR?EFACTOS
NAVALES EN EL ÁREA MARINA DE INFLUENCIA DE PEP.
10. CONTROL DE ACTUALIZACI~N DEL PROCEDIMIENTO.
Subdirección: Coordinación de Servicios Marinos. ActivoIGerencia: Gerencia de Logística SubgerenciaISuptcia: Fecha próxima actualización: Mayo de 2016 Ubicación física del documento: Gerencia de Logística
Nombre
Ing. Amado Yunes
Salomón 1 Ing. Baudelio
Prieto de la Rocha
Ing. Amado Yunes
Salomón 1 Ing. Raul Casto Gonzalez
Enciso
11.- VERIFICACIÓN DE QUE EL PROCEDliVllENTO CUiVlPLE CON EL'PROCEDIIVIIENTO PG-NO- OP-001-2010 QUINTA VERSIÓN.
Descripción de Cambios Se agregan puntos relacionados al cierre de po;os y desfogue de líneas durante las maniobras de acercamiento o retiro de equipos móviles de perforación, así como puntos relacionados a la verificaciones de las Embarcaciones de posicionamiento dinámico Se modifican los puntos relacionados al cierre de pozos y desfogue de líneas durante las maniobras de acercamiento o retiro de equipos móviles de perforación, se agregan definiciones que no estaban incluidas, se amplía a 90 días la vigencia del mapeo del lecho marino.
VERIFICA
Versión
Primera
Segunda
Ing. Catalina García Almanza E. D. de la Subgerencia de Normatividad