nxt 2
TRANSCRIPT

Sebastián Hernández Pardo
Segundo Periodo

NXT 2.0SENSORES Y CARACTERÍSTICAS
D A V I D G O N Z Á L E Z
9 0 6

¿QUÉ ES UN SENSOR TACTIL?
Los sensores táctiles permiten al robot desenvolverse en el entorno correctamente, al llegar a un obstáculo el robot lo tocará y automáticamente mediante un condicional hará una acción.

APLICACIONES DEL SENSOR TÁCTIL
El sensor táctil permite la mejor movilidad e interacción con los objetos, objetivos u obstáculos del entorno.

¿QUÉ ES UN SENSOR ACÚSTICO?
Un sensor acústico permite al robot realizar una acción mediante un condicional, a partir de un nivel de sonido.
APLICACIONES DEL SENSOR ACÚSTICO
Un sensor acústico permite al robot realizar una acción a partir de cambios en las ondas sonoras o desenvolverse en el entorno.

¿QUÉ ES UN SENSOR FOTOSENSIBLE?
Le permite al robot realizar una acción al visualizar un conjunto de luces o colores.

APLICACIONES DEL SENSOR FOTOSENSIBLE
El sensor fotosensible permite al robot desenvolverse en el espacio fácilmente y realizar acciones mediante colores o cambios de luz, gracias al sensor fotosensible un robot puede seguir una línea negra y evitar pasar por una superficie blanca.

¿QUÉ ES UN SENSOR ULTRASÓNICO?
Un sensor ultrasónico mide la distancia hacia un objeto a través de ondas y realiza una acción a partir de la situación.

APLICACIONES DEL SENSOR ULTRASÓNICO
El sensor ultrasónico puede ser utilizado para evitar choques o mejorar la experiencia de movimiento usando condicionales, y añadirle mas características a su robot.
¿QUÉ ES UN SERVOMOTOR?
Son los encargados del movimiento del NXT, El bloque desplazar [Move] automáticamente alinea sus velocidades para que el robot se mueva suavemente.
El sensor de rotación integrado mide las rotaciones del motor en grados (precisión de +/- un grado) o en rotaciones completas.
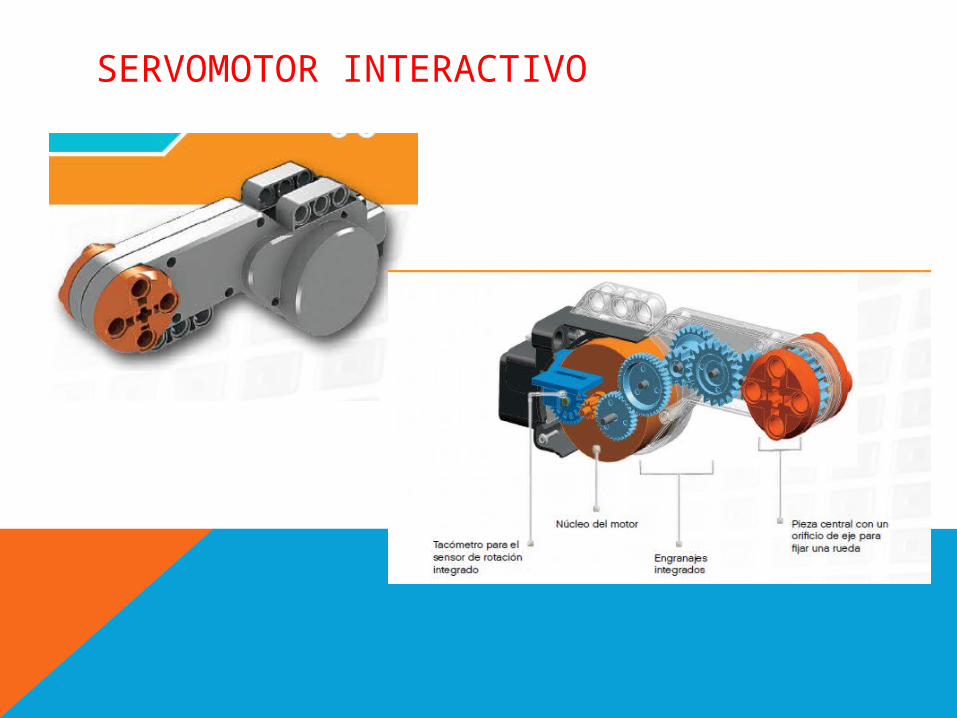
SERVOMOTOR INTERACTIVO

APLICACIONES DEL SERVOMOTOR
El servomotor puede ser utilizado para la correcta movilidad del robot en cualquier tipo de superficie, además de sumarle a la precisión de traslado.

LÁMPARA NXT
Son usados para darle vitalidad a los ojos de su robot, o simplemente para iluminar, pueden ser usados también para probar los sensores fotosensibles.

APLICACIONES DE LA LÁMPARA EN UN NXT
Se puede encender y apagar las lámparas, para crear patrones intermitentes de luz.
También pueden utilizarse para activar el sensor fotosensible, para mostrar que un motor está encendido o para indicar el estado de un sensor.