monografÍa compensaciÓn reactiva
DESCRIPTION
pequeño resumen de compensacion reativaTRANSCRIPT
1.1 PRESENTACION GENERAL DEL PROBLEMA
Los estudios en estado estacionario de los Sistemas de Suministro de Energía Eléctrica (SSEE), tales como flujo de potencia, corto circuito y estabilidad, permiten definir los componentes y topología de la red, el parque de generación y el modo de operar el sistema en función de la demanda y de la disponibilidad de los recursos energéticos primarios. Estos estudios persiguen además como objetivo que el suministro resulte suficiente y satisfaga un determinado estándar de calidad, confiabilidad y criterios económicos.
De este modo el nivel de tensión en las distintas barras, el flujo de potencia por las líneas y fundamentalmente la potencia que se intercambia entre las áreas interconectadas, son definidas en cada estado de cargas en el marco de la programación óptima de la operación con la ayuda de los estudios de flujo de potencia activa y reactiva.
Adicionalmente a los estudios de estado estacionario mencionados se debe considerar el problema de regulación, cuyo objetivo es identificar los mecanismos que se deben implementar en el sistema con la finalidad de:
• Mantener las magnitudes eléctricas más relevantes (tensión en los nodos, frecuencia y potencia a través de las interconexiones) tan próximas como resulte posible a los valores de referencias preestablecidos ante la presencia de pequeñas variaciones de la carga o de contingencias.
• Sostener la tensión y fundamentalmente la frecuencia ante fallas significativas, que de otro modo, podrían conducir al colapso del sistema.
Aunque el problema de regulación planteado es de naturaleza dinámica, los mecanismos o fuerzas de control aplicados son básicamente los mismos que fueron considerados en los estudios de flujo de carga desde un punto de vista estático.
Es conveniente señalar que aunque la frecuencia no es objeto de los estudios estacionarios, ya que su valor de referencia no admite variaciones desde este punto de vista, su regulación se apoya en el control de la potencia entregada por las máquinas de impulso a los generadores. En efecto, conceptualmente el sistema de control trata de que en todo momento esta potencia iguale a la demanda de potencia eléctrica (incluidas las pérdidas) de modo que no exista un excedente que incrementaría la energía cinética de las masas rotantes. Análogamente, cuando es necesario restablecer la frecuencia desde un valor inferior a su valor nominal, este balance de potencias es alterado temporalmente para producir la energía cinética necesaria a tal efecto.
Sería interesante que el mismo criterio de invariabilidad aplicado a la frecuencia pudiese extenderse al nivel de tensión de cada barra, sin embargo esto requeriría instalar en cada barra, o al menos en un importante número de ellas, dispositivos
capaces de modificar en forma continua su consumo/aporte de potencia reactiva en función del estado de carga tales como compensadores sincrónicos o compensadores controlados por tiristores. El hecho de que las variaciones de tensión aceptables sean mucho más amplias que las admitidas para la frecuencia y el elevado costo de las referidas instalaciones, origina que la alternativa mencionada no se lleve a la práctica y se instalen los elementos de compensación en las zonas donde se consideran que son estrictamente necesarios.
1.2 RELACION ENTRE LA TENSION Y LA POTENCIA REACTIVA
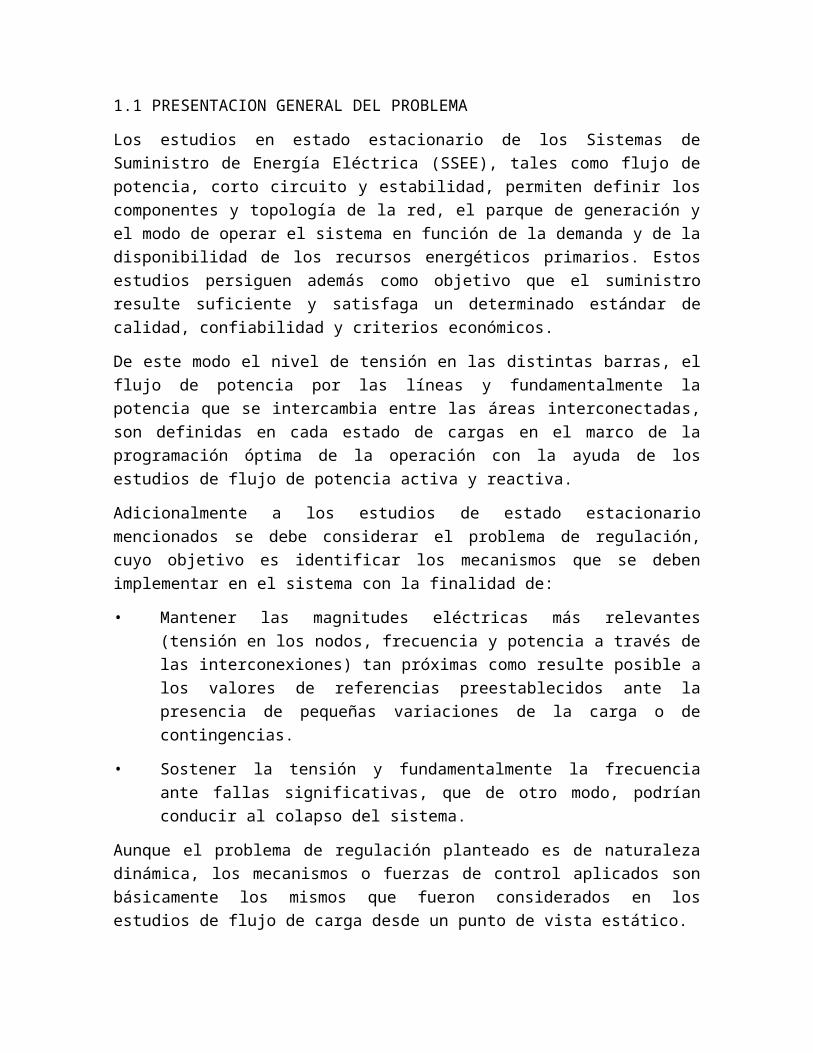
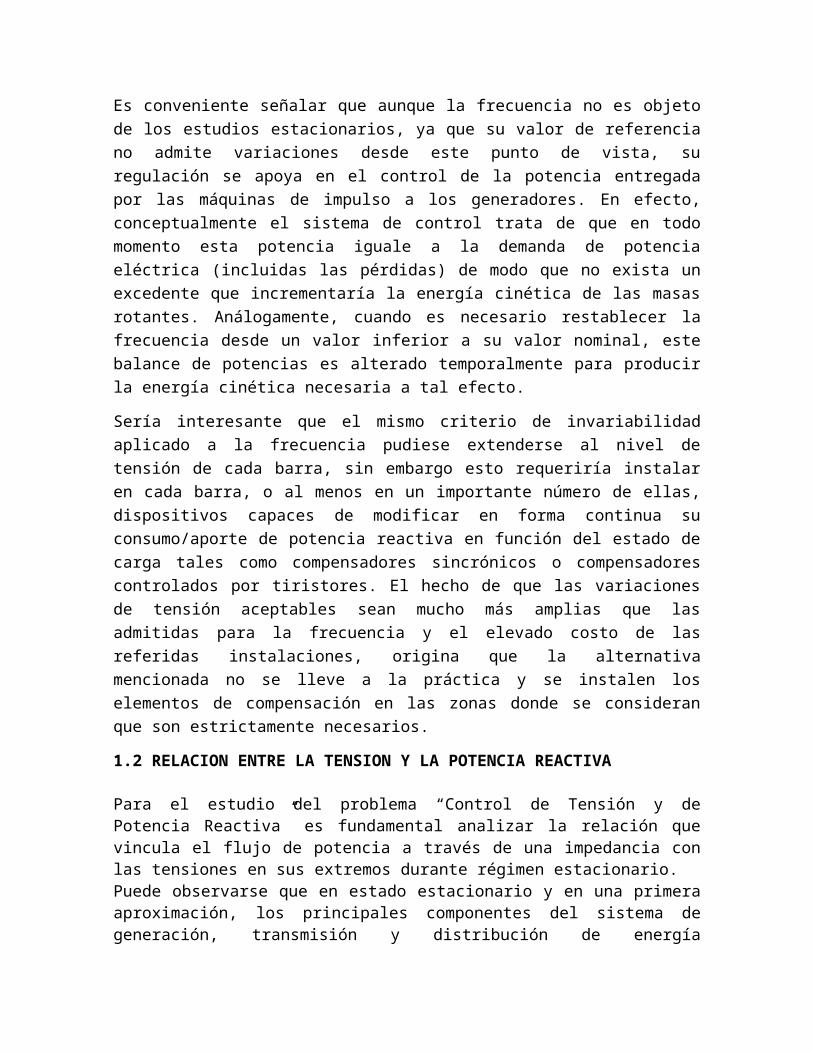
Para el estudio del problema “Control de Tensión y de Potencia Reactiva” es fundamental analizar la relación que vincula el flujo de potencia a través de una impedancia con las tensiones en sus extremos durante régimen estacionario.Puede observarse que en estado estacionario y en una primera aproximación, los principales componentes del sistema de generación, transmisión y distribución de energía (generadores, transformadores y líneas o cables) pueden ser modelados a través de impedancias.Tanto en el circuito de la figura (1.1) como en su correspondiente diagrama fasorial de la figura (1.2) se verifican las expresiones detalladas en (1.1), donde se ha adoptado la tensión Ur como referencia para el cálculo (fase = 0).
Figura 1.1: Esquema circuital representativo de una línea, transformador o generador
Figura 1.2: Diagrama fasorial del esquema circuital de la figura 1.1.
Aplicando la ley de Kirchoff a la malla constituida por este pequeño circuito, resulta la expresión (1.2).
Teniendo en cuenta además la potencia transmitida hacia el nodo receptor se obtienen las expresiones (1.3).
Despejando I r de la expresión (1.3) y teniendo en cuenta que U r se ha adoptado como tensión de referencia (U r=U r
¿), se obtiene la ecuación (1.4).
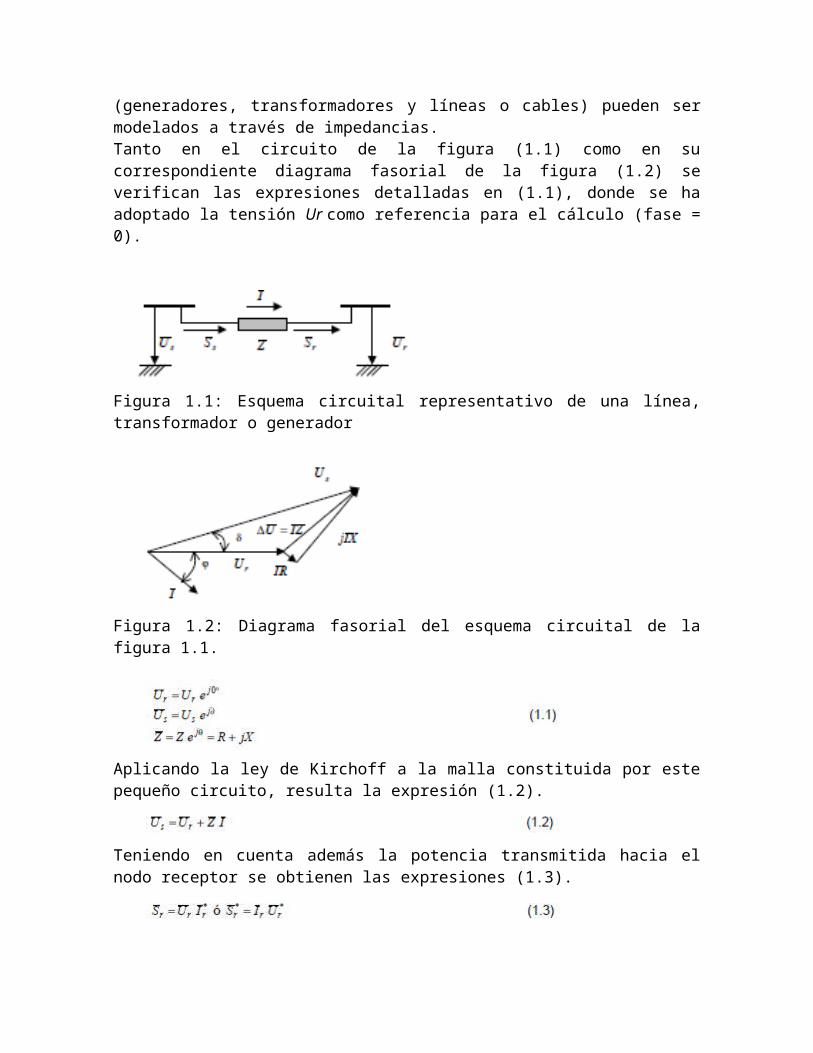
Reemplazando la expresión (1.4) en (1.2) y teniendo en cuenta que la impedancia de la línea se puede representar como Z = R + jX , resulta la ecuación (1.5)
La representación fasorial de la expresión (1.5) puede observarse en la figura (1.3).
Figura 1.3: Diagrama fasorial del esquema circuital de la figura 1.1, teniendo en cuenta la ecuación (1.5).
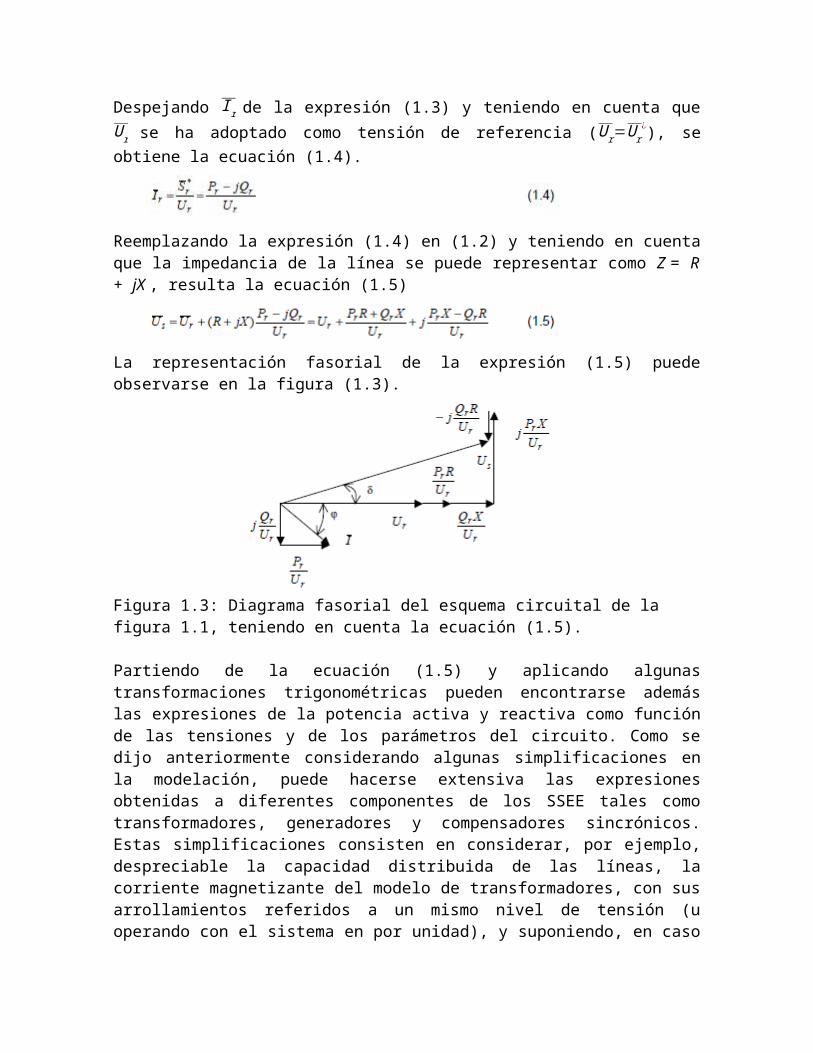
Partiendo de la ecuación (1.5) y aplicando algunas transformaciones trigonométricas pueden encontrarse además las expresiones de la potencia activa y reactiva como función de las tensiones y de los parámetros del circuito. Como se dijo anteriormente considerando algunas simplificaciones en la modelación, puede hacerse extensiva las expresiones obtenidas a diferentes componentes de los SSEE tales como transformadores, generadores y compensadores sincrónicos. Estas simplificaciones consisten en considerar, por ejemplo, despreciable la capacidad distribuida de las líneas, la corriente magnetizante del modelo de transformadores, con sus arrollamientos referidos a un mismo nivel de tensión (u operando con el sistema en por unidad), y suponiendo, en caso de generadores y compensadores sincrónicos, un circuito magnético de comportamiento lineal.
Teniendo en cuenta además las características esencialmente inductivas de las impedancias (R << X) la mayoría de los componentes de los sistemas de generación y transmisión de energía en alta tensión, como se observa en el figura (1.4), las expresiones mencionadas pueden reducirse a las ecuaciones representadas en (1.6), (1.7) y (1.8).
Figura 1.4: Relación X/R para los distintos componentes de la red.
Es necesario destacar que en el caso de sistemas de sub - transmisión y distribución (tensiones menores o iguales a 132 kV) o en la situación que se utilicen cables en los sistemas de alta tensión, los cuales presentan una reducida inductancia, las simplificaciones empleadas para la obtención de las expresiones (1.6), (1.7) y (1.8) no son totalmente válidas.
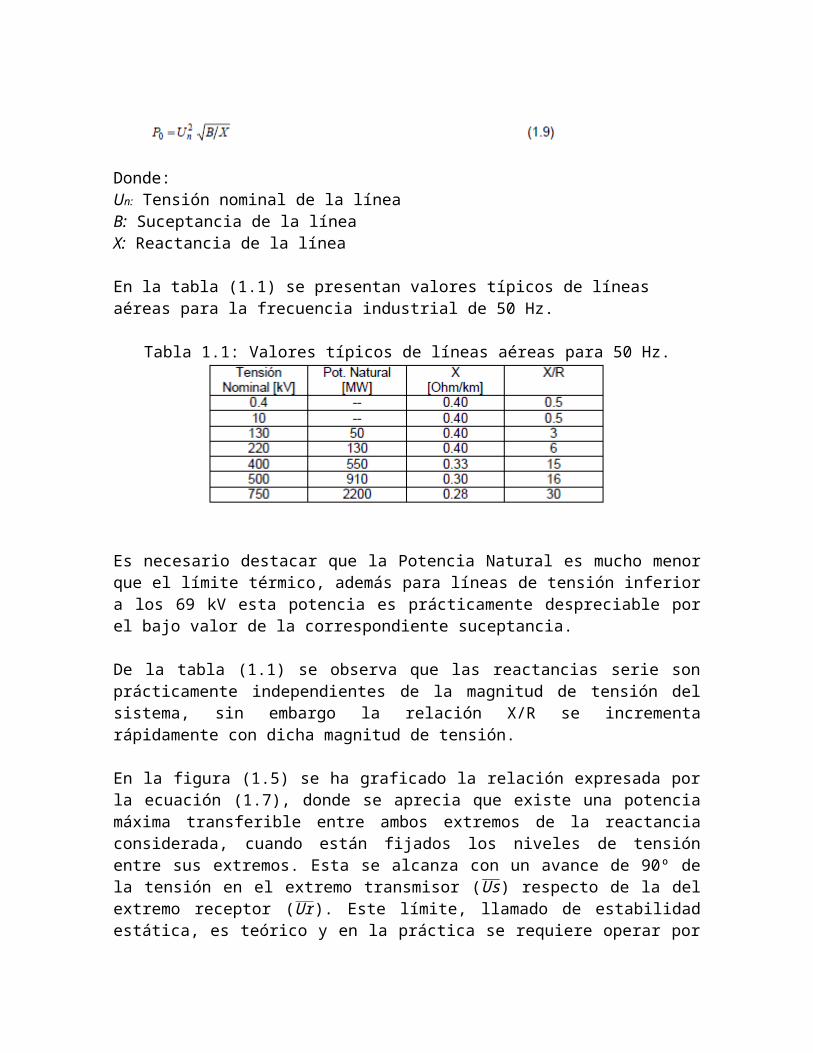
En líneas de alta tensión es conveniente calcular la Potencia Natural (P0) como valor de referencia. Esta puede expresarse por la ecuación (1.9).
Donde:Un: Tensión nominal de la líneaB: Suceptancia de la líneaX: Reactancia de la línea
En la tabla (1.1) se presentan valores típicos de líneas aéreas para la frecuencia industrial de 50 Hz.
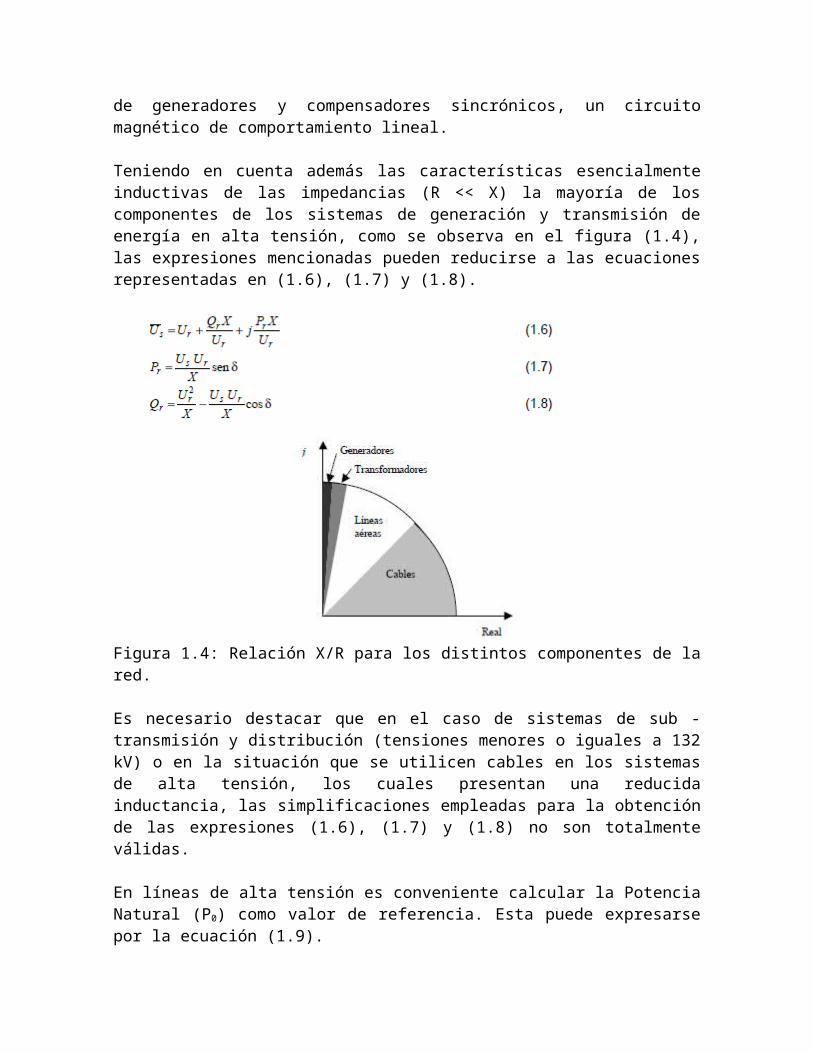
Tabla 1.1: Valores típicos de líneas aéreas para 50 Hz.
Es necesario destacar que la Potencia Natural es mucho menor que el límite térmico, además para líneas de tensión inferior a los 69 kV esta potencia es prácticamente despreciable por el bajo valor de la correspondiente suceptancia.
De la tabla (1.1) se observa que las reactancias serie son prácticamente independientes de la magnitud de tensión del sistema, sin embargo la relación X/R se incrementa rápidamente con dicha magnitud de tensión.
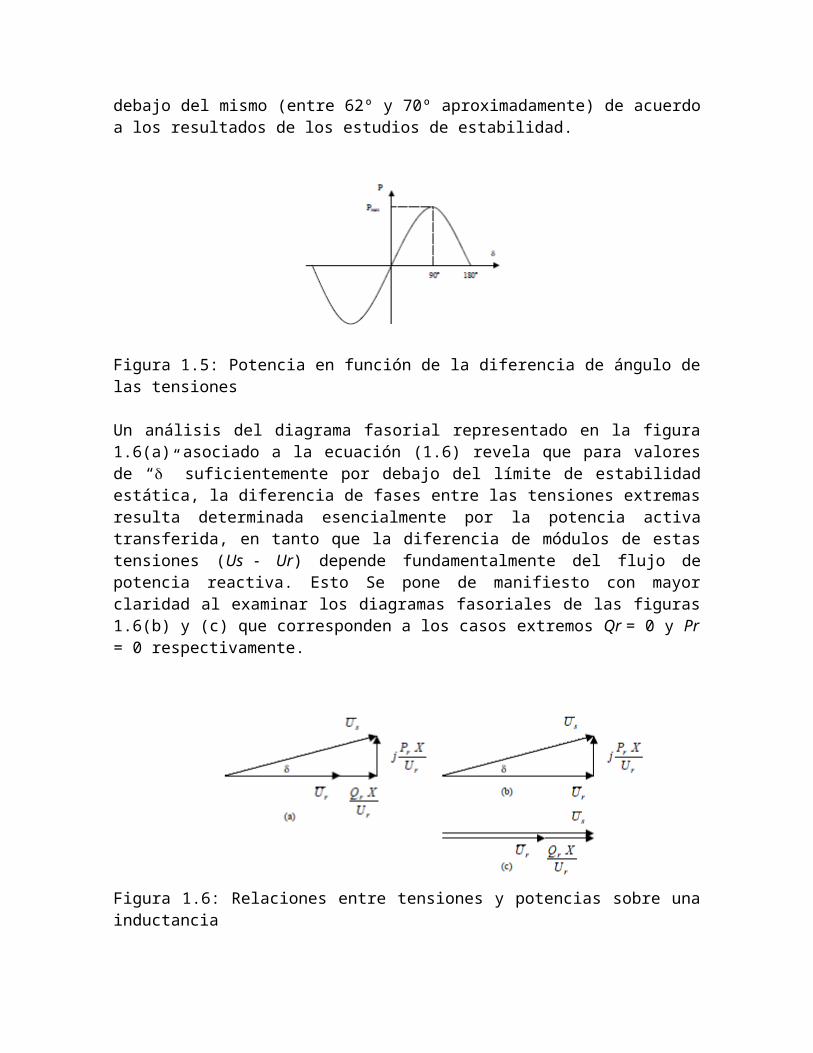
En la figura (1.5) se ha graficado la relación expresada por la ecuación (1.7), donde se aprecia que existe una potencia máxima transferible entre ambos extremos de la reactancia considerada, cuando están fijados los niveles de tensión entre sus extremos. Esta se alcanza con un avance de 90º de la tensión en el extremo transmisor (Us) respecto de la del extremo receptor (Ur). Este límite, llamado de estabilidad estática, es teórico y en la práctica se requiere operar por debajo del mismo (entre 62º y 70º aproximadamente) de acuerdo a los resultados de los estudios de estabilidad.
Figura 1.5: Potencia en función de la diferencia de ángulo de las tensiones
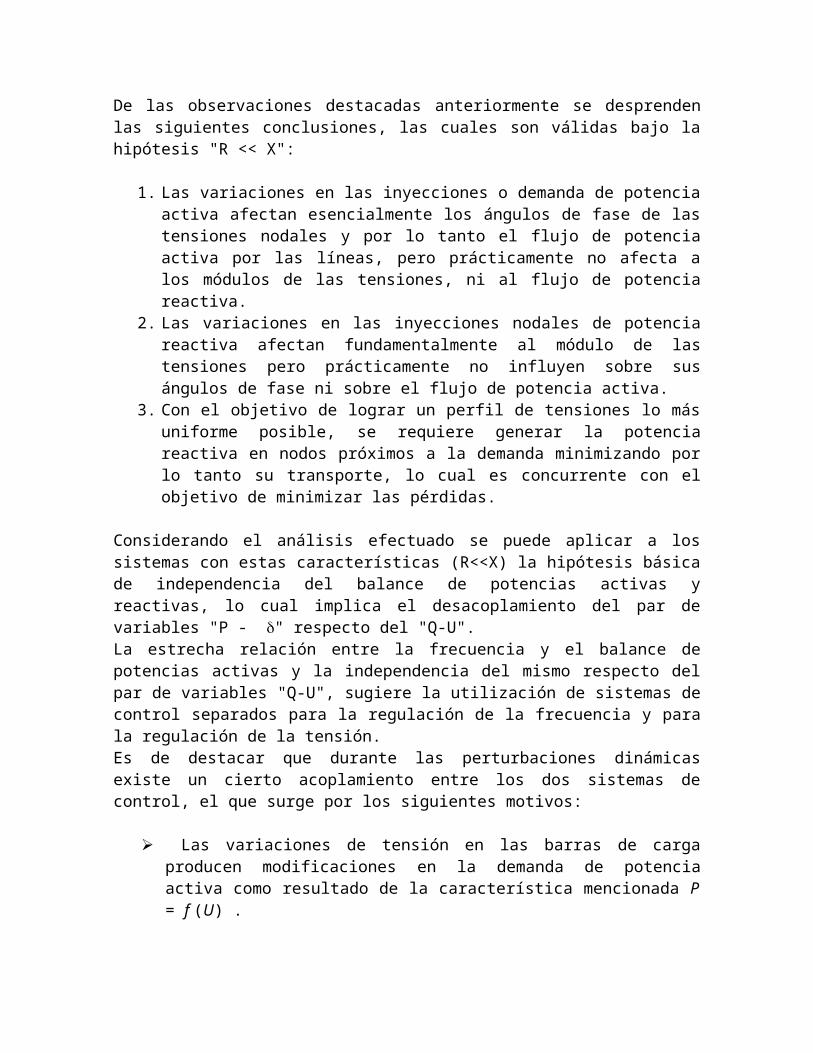
Un análisis del diagrama fasorial representado en la figura 1.6(a) asociado a la ecuación (1.6) revela que para valores de “” suficientemente por debajo del límite de estabilidad estática, la diferencia de fases entre las tensiones extremas resulta determinada esencialmente por la potencia activa transferida, en tanto que la diferencia de módulos de estas tensiones (Us - Ur) depende fundamentalmente del flujo de potencia reactiva. Esto Se pone de manifiesto con mayor claridad al
examinar los diagramas fasoriales de las figuras 1.6(b) y (c) que corresponden a los casos extremos Qr = 0 y Pr = 0 respectivamente.
Figura 1.6: Relaciones entre tensiones y potencias sobre una inductancia
De las observaciones destacadas anteriormente se desprenden las siguientes conclusiones, las cuales son válidas bajo la hipótesis "R << X":
1. Las variaciones en las inyecciones o demanda de potencia activa afectan esencialmente los ángulos de fase de las tensiones nodales y por lo tanto el flujo de potencia activa por las líneas, pero prácticamente no afecta a los módulos de las tensiones, ni al flujo de potencia reactiva.
2. Las variaciones en las inyecciones nodales de potencia reactiva afectan fundamentalmente al módulo de las tensiones pero prácticamente no influyen sobre sus ángulos de fase ni sobre el flujo de potencia activa.
3. Con el objetivo de lograr un perfil de tensiones lo más uniforme posible, se requiere generar la potencia reactiva en nodos próximos a la demanda minimizando por lo tanto su transporte, lo cual es concurrente con el objetivo de minimizar las pérdidas.
Considerando el análisis efectuado se puede aplicar a los sistemas con estas características (R<<X) la hipótesis básica de independencia del balance de potencias activas y reactivas, lo cual implica el desacoplamiento del par de variables "P - " respecto del "Q-U".La estrecha relación entre la frecuencia y el balance de potencias activas y la independencia del mismo respecto del par de variables "Q-U", sugiere la utilización de sistemas de control separados para la regulación de la frecuencia y para la regulación de la tensión.Es de destacar que durante las perturbaciones dinámicas existe un cierto acoplamiento entre los dos sistemas de control, el que surge por los siguientes motivos:
Las variaciones de tensión en las barras de carga producen modificaciones en la demanda de potencia activa como resultado de la característica mencionada P = f (U) .
Las variaciones de tensión en las barras afectan también a las potencias sincronizantes (UsUr /X) y en consecuencia perturban el flujo de potencias activas.
Sin embargo, el lazo de control "Q-U" es de actuación mucho más rápida que el lazo "P-f" caracterizado por importantes inercias mecánicas. Por lo tanto puede asumirse, sin cometer un error significativo para el análisis, que los procesos transitorios en el sistema de control "Q-U" corrigen las desviaciones de tensión antes de que el control "P-f" reaccione a las perturbaciones referidas. Debido a esto se puede justificar el desacoplamiento requerido para la separación de los lazos de control.
Ambos sistemas de control son generalmente descentralizados, lo cual significa que los dispositivos de control son instalados en distintos puntos de la red regulando variables locales. Con esto se consigue un adecuado control sobre todo el sistema.Esta práctica está ampliamente probada y los resultados obtenidos han sido satisfactorios. Cabe mencionar sin embargo que, alentados por los progresos tecnológicos en el área de la computación y de las comunicaciones, actualmente se está estudiando la posibilidad y ventajas de usar sistemas de control centralizados.
En estos sistemas las señales con las desviaciones en las variables controladas, recibidas desde distintos puntos de la red, son procesadas a los efectos de definir acciones de control coordinadas que son ordenadas a los actuadores también distribuidos en distintos puntos. Esta estrategia permitiría, según se prevé, un control más rápido y fundamentalmente mejorar la estabilidad ante pequeñas perturbaciones de sistemas que, por su estructura, presentan oscilaciones de frecuencia poco amortiguadas.
1.3 INFLUENCIA DE LA POTENCIA REACTIVA EN EL CALCULODE PÉRDIDAS
Teniendo en cuenta la ecuación (1.4), la corriente aparente por el componente de transmisión se puede calcular según la expresión (1.10).
Partiendo de la ecuación (1.10) para el cálculo de la corriente, se pueden calcular las pérdidas mediante la expresión (1.11).
De la expresión (1.11) puede observarse que el incremento en la potencia reactiva implica un aumento en la corriente aparente y por lo tanto mayores pérdidas y carga térmica del conductor.
1.4 CONCLUSIONES IMPORTANTES
Todo SSEE tiene por objetivo transmitir la potencia activa desde los generadores a la demanda satisfaciendo una serie de criterios vinculados con la calidad, seguridad y economía. Sin embargo en el caso de la potencia reactiva la situación es diferente, ya que no existe un compromiso entre generación y demanda en este aspecto. A pesar de ello la potencia reactiva circula por el sistema como consecuencia de las características de los componentes, originando caídas de tensión, pérdidas y sobrecargas térmicas como se observó precedentemente. En forma ideal la potencia reactiva debiera estar balanceada dentro de cada región de un sistema de potencia, dentro de cada sistema de transmisión y dentro de cada sistema de distribución. En la práctica lamentablemente no siempre se puede cumplir este objetivo por diferentes razones.La compensación de potencia reactiva es fácil de comprender en el caso que se analice un componente de un sistema de potencia como se ha presentado en los párrafos anteriores, sin embargo cuando se considera un sistema real de potencia con los diferentes componentes que lo integran y bajo las distintas condiciones de operación a la que está sometido, este tratamiento se vuelve bastante complejo.
2. CONTROL DE TENSION Y POTENCIA REACTIVA ENSISTEMAS DE TRANSMISIÓN EN ESTADO ESTACIONARIOLa correcta planificación y coordinación de los elementos destinados al control de la tensión y de la potencia reactiva es fundamental para el diseño y funcionamiento de los sistemas de potencia en forma confiable, no solo bajo condiciones de operación normal sino también ante la mayoría de las situaciones que involucren perturbaciones de importancia.Es conveniente que las partes integrantes de un sistema de potencia sean operadas teniendo en cuenta las siguientes consideraciones:
El perfil de tensiones debe ser lo más uniforme posible, con la finalidad de evitar el flujo de potencia reactiva innecesario.
El suministro de potencia reactiva en los sistemas de distribución debe ser relativamente pequeño.
La capacidad de reserva disponible de potencia reactiva debe ser lo suficientemente grande para evitar problemas de operación del sistema ante situaciones que involucren perturbaciones de importancia o bien contingencias en diferentes componentes del sistema (generadores, transformadores y líneas).
Seguidamente se analizarán diferentes elementos de control utilizados para la regulación de tensión, la que de acuerdo al análisis precedente se consigue actuando fundamentalmente sobre el flujo de potencia reactiva.Los dispositivos utilizados se analizarán en relación con su comportamiento en estado estacionario.
El objetivo del control de tensión en estado estacionario es intentar mantener las tensiones de las barras en los sistemas de transmisión dentro de límites especificados, mientras la transferencia de potencia activa varía para satisfacer en todo momento las demandas de los usuarios.En los sistemas de potencia los valores de tensión deseables en las barras para condiciones de operación normal están definidos usualmente en el rango de ±5% respecto de la tensión nominal, pudiendo alcanzar en algunos casos extremos±10 %. En situaciones de contingencias se suele permitir mayores desviaciones que las mencionadas.En la República Argentina se han adoptado los valores límites expresados en la tabla 2.1 para las barras del SADI, según sea su correspondiente tensión nominal.
Tabla 2.1: Valores límites de tensión adoptados para el SADI
El control de tensión en un sistema de potencia básicamente es provisto por los grandes generadores, los cuales deben poseer un control automático de tensión (AVR) que actúa sobre su sistema de excitación. Los generadores son utilizados para controlar la tensión de los terminales a los cuales ellos están conectados, generando o absorbiendo potencia reactiva de acuerdo a las condiciones de carga.La transferencia de potencia reactiva desde los generadores hacia puntos eléctricamente alejados y viceversa se evita generalmente en condiciones normales de operación. Estos son sin embargo muy importantes como reserva de potencia reactiva ante situaciones de contingencia tanto de generadores como de líneas.
A los efectos de obtener un perfil de tensiones lo más uniforme posible, minimizar las pérdidas y mejorar la estabilidad del sistema es necesario minimizar el flujo de potencia reactiva a través de los diferentes componentes que integran el sistema de transmisión.
En los sistemas de transmisión esto se consigue principalmente compensando la potencia reactiva generada o consumida por las líneas, conectando compensadores de diferentes características en las proximidades de las cargas, lo que en la práctica significa en las barras extremas o incluso en barras intermedias en el caso de líneas largas. En este tipo de líneas los problemas de control de tensión y estabilidad son más pronunciados debido a su alta “impedancia de transferencia”.Dado que el comportamiento de las líneas en general depende del estado de carga (capacitivo cuando están poco cargadas e inductivo con flujos que superan
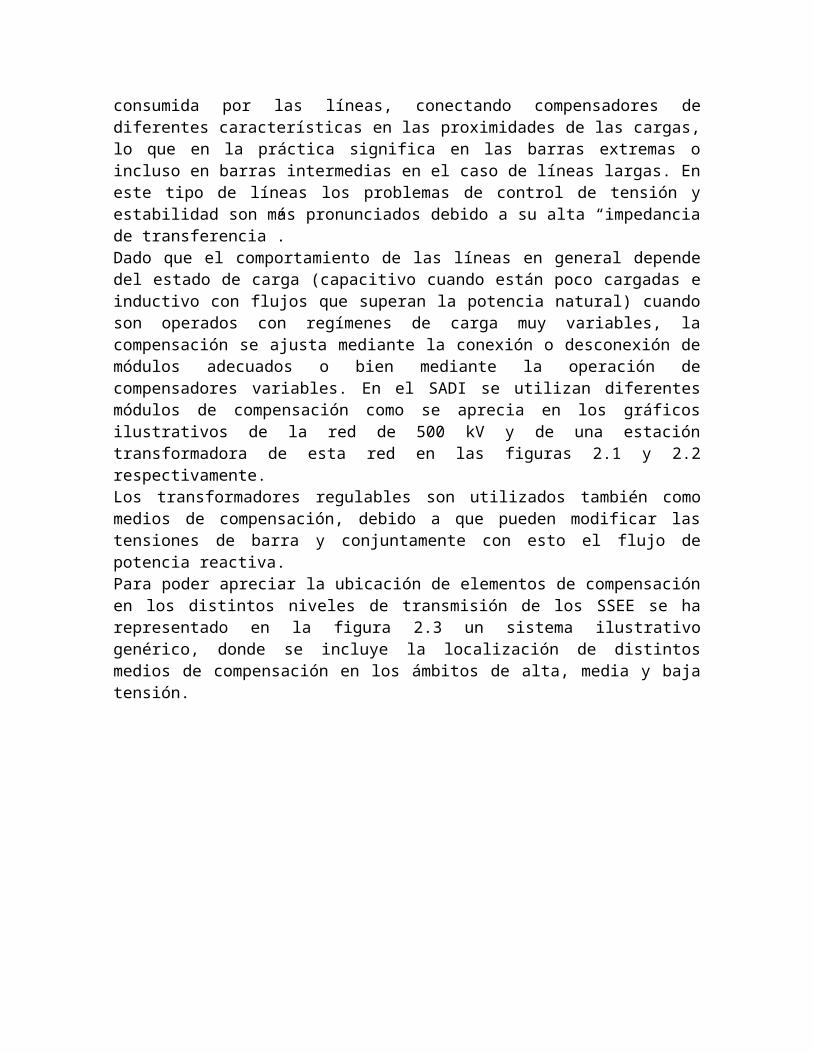
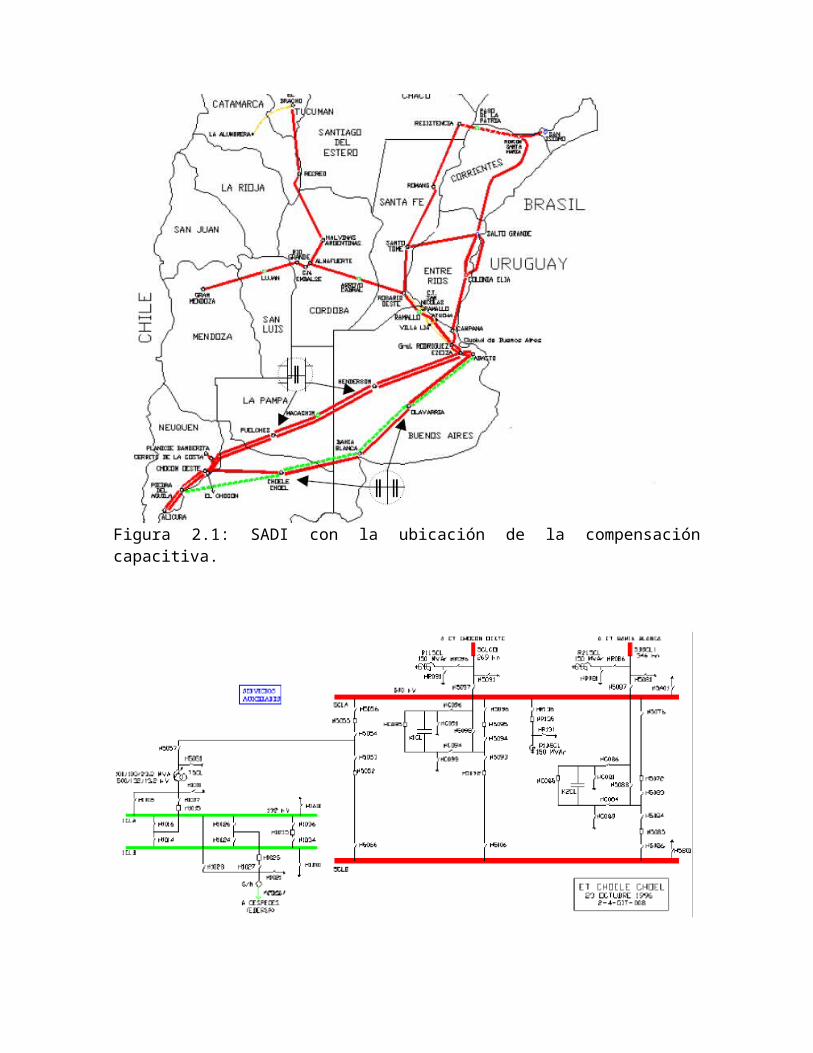
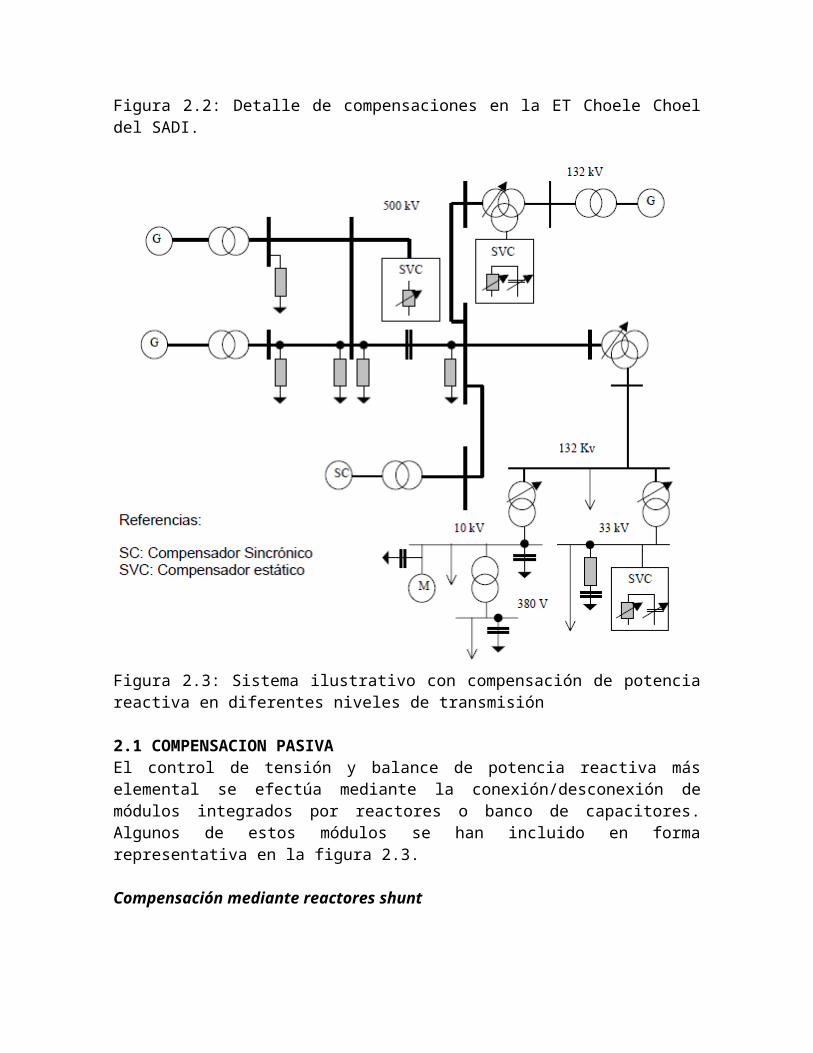
la potencia natural) cuando son operados con regímenes de carga muy variables, la compensación se ajusta mediante la conexión o desconexión de módulos adecuados o bien mediante la operación de compensadores variables. En el SADI se utilizan diferentes módulos de compensación como se aprecia en los gráficos ilustrativos de la red de 500 kV y de una estación transformadora de esta red en las figuras 2.1 y 2.2 respectivamente.Los transformadores regulables son utilizados también como medios de compensación, debido a que pueden modificar las tensiones de barra y conjuntamente con esto el flujo de potencia reactiva.Para poder apreciar la ubicación de elementos de compensación en los distintos niveles de transmisión de los SSEE se ha representado en la figura 2.3 un sistema ilustrativo genérico, donde se incluye la localización de distintos medios de compensación en los ámbitos de alta, media y baja tensión.
Figura 2.1: SADI con la ubicación de la compensación capacitiva.
Figura 2.2: Detalle de compensaciones en la ET Choele Choel del SADI.
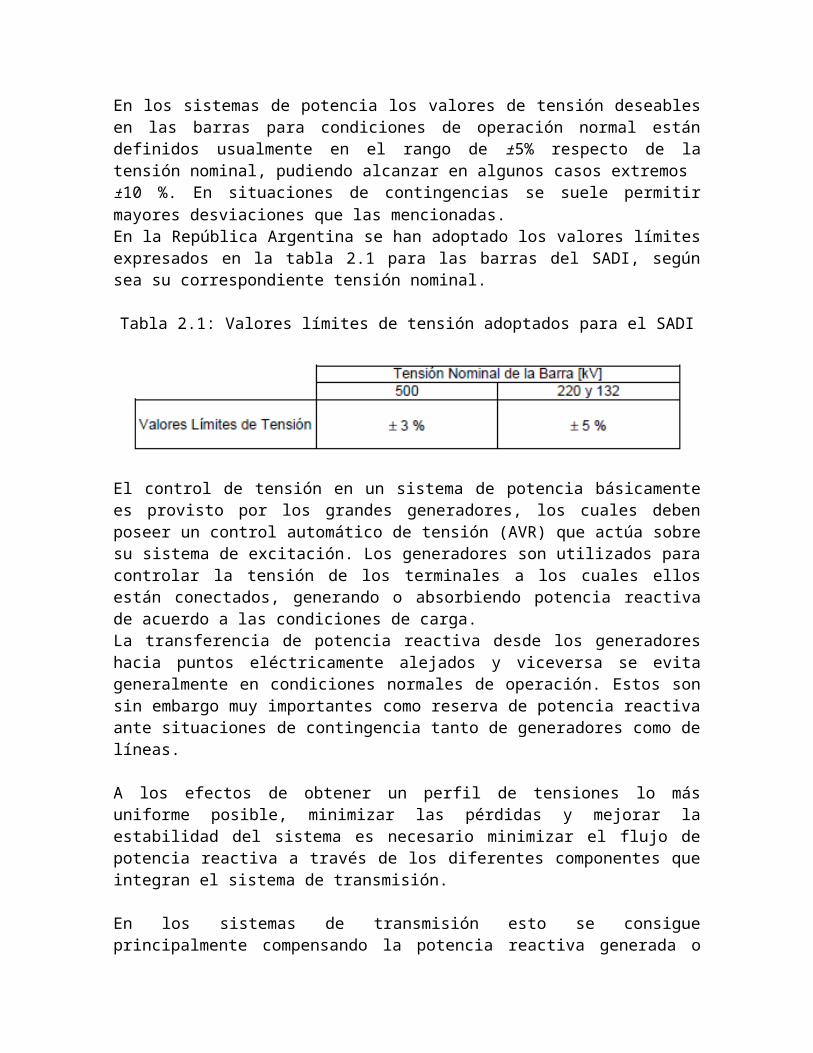
Figura 2.3: Sistema ilustrativo con compensación de potencia reactiva en diferentes niveles de transmisión
2.1 COMPENSACION PASIVAEl control de tensión y balance de potencia reactiva más elemental se efectúa mediante la conexión/desconexión de módulos integrados por reactores o banco de capacitores. Algunos de estos módulos se han incluido en forma representativa en la figura 2.3.
Compensación mediante reactores shunt
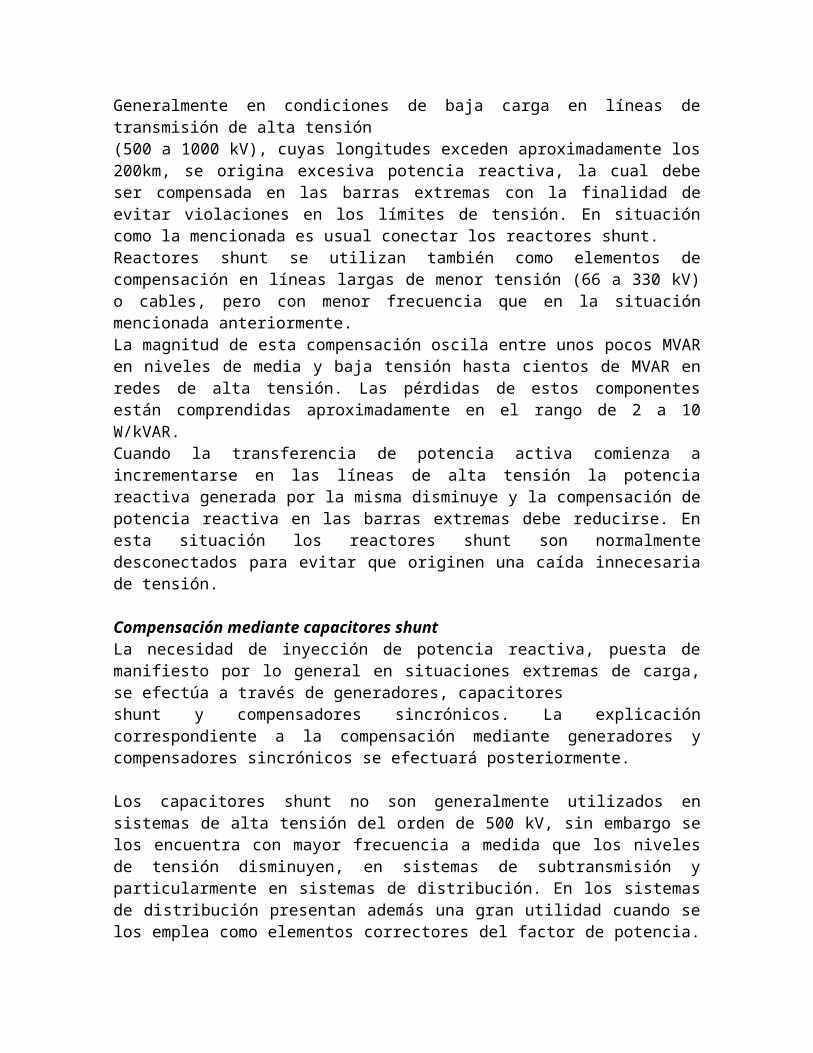
Generalmente en condiciones de baja carga en líneas de transmisión de alta tensión(500 a 1000 kV), cuyas longitudes exceden aproximadamente los 200km, se origina excesiva potencia reactiva, la cual debe ser compensada en las barras extremas con la finalidad de evitar violaciones en los límites de tensión. En situación como la mencionada es usual conectar los reactores shunt.Reactores shunt se utilizan también como elementos de compensación en líneas largas de menor tensión (66 a 330 kV) o cables, pero con menor frecuencia que en la situación mencionada anteriormente.La magnitud de esta compensación oscila entre unos pocos MVAR en niveles de media y baja tensión hasta cientos de MVAR en redes de alta tensión. Las pérdidas de estos componentes están comprendidas aproximadamente en el rango de 2 a 10 W/kVAR.Cuando la transferencia de potencia activa comienza a incrementarse en las líneas de alta tensión la potencia reactiva generada por la misma disminuye y la compensación de potencia reactiva en las barras extremas debe reducirse. En esta situación los reactores shunt son normalmente desconectados para evitar que originen una caída innecesaria de tensión.
Compensación mediante capacitores shuntLa necesidad de inyección de potencia reactiva, puesta de manifiesto por lo general en situaciones extremas de carga, se efectúa a través de generadores, capacitoresshunt y compensadores sincrónicos. La explicación correspondiente a la compensación mediante generadores y compensadores sincrónicos se efectuará posteriormente.
Los capacitores shunt no son generalmente utilizados en sistemas de alta tensión del orden de 500 kV, sin embargo se los encuentra con mayor frecuencia a medida que los niveles de tensión disminuyen, en sistemas de subtransmisión y particularmente en sistemas de distribución. En los sistemas de distribución presentan además una gran utilidad cuando se los emplea como elementos correctores del factor de potencia. Esta compensación está formada por un único capacitor o bien, como ocurre con mayor frecuencia, por un banco de capacitores conectados en shunt con el sistema de potencia.
La magnitud de esta compensación capacitiva oscila entre unos pocos kVAR en niveles de media y baja tensión hasta cientos de MVAR en bancos de capacitores para redes de alta tensión. Las pérdidas totales de modernos capacitores shunt están aproximadamente en el orden de 0.2 W/kVAR.La construcción de un banco de capacitores shunt es muy flexible, debido a la estructura modular de sus componentes. El banco de capacitores consiste generalmente en conectar en serie y paralelo los diferentes módulos capacitivos.Las principales ventajas de este tipo de compensación son sus bajos costos, en comparación con los otros componentes del sistema, y su flexibilidad de aplicación.
Compensación mediante capacitores serie
La compensación capacitiva serie es utilizada en líneas largas de alta tensión con la finalidad de mejorar la estabilidad en estado transitorio o bien obtener una deseada división del transporte del flujo de potencia entre circuitos en paralelo.Este tipo de compensación está instalada en su mayoría en sistemas de alta tensión(300 a 800 kV) y la magnitud de esta compensación capacitiva oscila generalmente entre 100 a 1000 MVAR.Esta compensación serie presenta además la ventaja de que disminuye el efecto de la reactancia inductiva de la línea y por lo tanto la potencia reactiva consumida como función de la potencia transportada, mejorando los niveles de tensión en los nodos extremos. Compensación de este tipo puede apreciarse en los componentes del"SADI" presentados en las figuras 2.1 y 2.2.
2.2 COMPENSACION DINAMICA SHUNTEn situaciones donde es necesario lograr un mejor control del nivel de tensión que la forma brindada por los compensadores shunt pasivos, se debe recurrir a la compensación dinámica shunt. Esta compensación permite efectuar acciones de control en forma continua, rápida, precisa y frecuente.Los componentes que efectúan la compensación shunt dinámica son los compensadores sincrónicos (SC) y los compensadores estáticos controlados por tiristores (SVC). La ubicación de los mismos puede apreciarse en la red genérica representada en la figura 2.3.
Compensación mediante compensadores sincrónicos
Un compensador sincrónico es un motor sincrónico operando en vacío, usado para la generación o absorción de potencia reactiva. Según sea la función desempeñada de las dos mencionadas, recibe el nombre de condensador sincrónico o compensador sincrónico de fase respectivamente.
Los compensadores sincrónicos una vez instalados operan en forma continua. Estos compensadores se ubican por lo general en regiones donde hay pequeña generación local y están localizadas al final de líneas radiales de transmisión o
bien en las barras principales de redes malladas con líneas extensas. Pequeños compensadores sincrónicos se han instalado también en redes industriales donde existen hornos eléctricos para fundición, pero actualmente pocos son los que permanecen en operación.La magnitud de los compensadores sincrónicos oscila entre unos pocos MVA hasta cientos de MVA. Las pérdidas totales dependen de los medios de refrigeración utilizados y están comprendidas aproximadamente en el rango de 10 a 20 W/kVAR.La tensión nominal de operación de estos equipos está por lo general por debajo de24 kV.El tamaño de un compensador sincrónico está referido a la generación de potencia reactiva. La capacidad de absorción de reactivo es aproximadamente el 60 % del valor expresado en MVA, lo cual significa que el rango de control es de 160 % de la magnitud especificada en MVA.
Compensadores estáticos de potencia reactiva controlados por tiristoresLa evolución de la electrónica de potencia ha hecho posible la aparición en los últimos años de compensadores estáticos controlados por tiristores (SVC), cuya reactancia efectiva es ajustada variando el ángulo de conducción de tiristores.Modificando adecuadamente el ángulo de disparo de los tiristores en función de la tensión en la barra u otra magnitud relacionada, es posible una rápida acción de regulación permitiendo la generación o absorción de potencia reactiva según corresponda.
En las instalaciones relativamente nuevas de los sistemas de transmisión se están utilizando como componentes de compensación dinámica shunt los SVC, los cuales están prácticamente reemplazando a los compensadores sincrónicos. Esto se debe fundamentalmente a los beneficios que se aprecian en los costos, mantenimiento de las instalaciones y características de funcionamiento. Una gran cantidad de estos equipos están actualmente en funcionamiento en todo el mundo debido a su excelente desempeño.La magnitud de este tipo de compensadores oscila entre unos pocos MVA hasta 650 MVA y se pueden vincular a redes, normalmente de alta tensión, con diferentes niveles de tensión alcanzando en algunos casos tensiones del orden de los 765 kV.Su aplicación en niveles de tensión menores también es posible aunque generalmente con otros objetivos, tales como corregir desbalances en las tensiones de fase o reducir el “fliquer” producido por las rápidas variaciones de carga de ciertas industrias como las que utilizan hornos de arco.Existen básicamente dos tipos de compensadores controlados por tiristores:• TSC: Capacitor controlado por tiristores• TCR: Reactor controlado por tiristores
Desde el punto de vista operativo se los puede considerar como una reactancia variable de características capacitivas o inductivas respectivamente.
Seguidamente se efectuará una descripción un poco más detallada de estos medios de compensación
a) Capacitor controlado por tiristores (TSC)
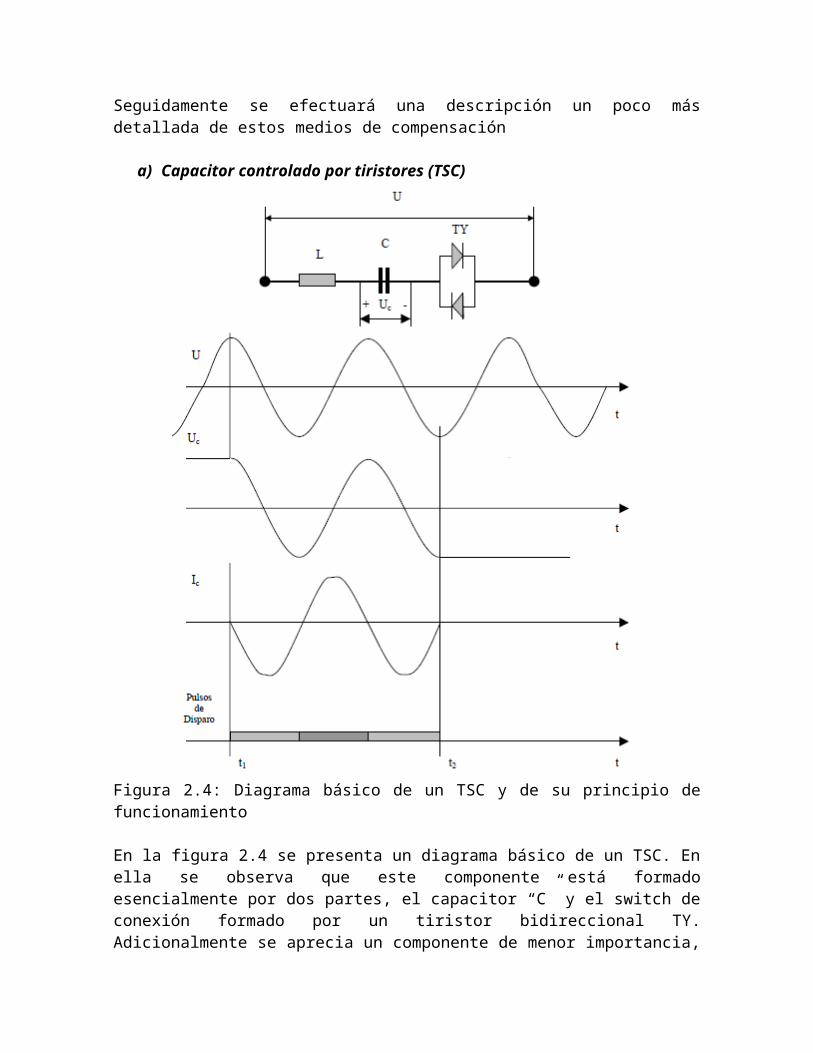
Figura 2.4: Diagrama básico de un TSC y de su principio de funcionamiento
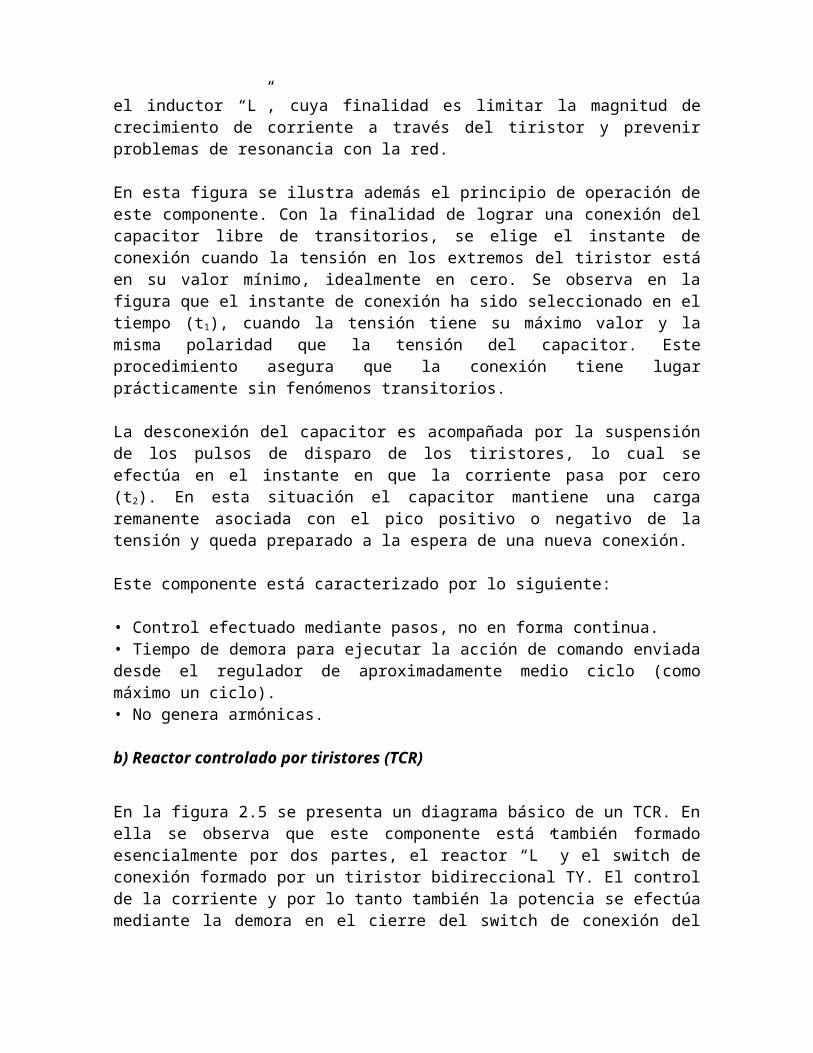
En la figura 2.4 se presenta un diagrama básico de un TSC. En ella se observa que este componente está formado esencialmente por dos partes, el capacitor “C” y el switch de conexión formado por un tiristor bidireccional TY. Adicionalmente se aprecia un componente de menor importancia, el inductor “L”, cuya finalidad es limitar la magnitud de crecimiento de corriente a través del tiristor y prevenir problemas de resonancia con la red.
En esta figura se ilustra además el principio de operación de este componente. Con la finalidad de lograr una conexión del capacitor libre de transitorios, se elige el instante de conexión cuando la tensión en los extremos del tiristor está en su valor mínimo, idealmente en cero. Se observa en la figura que el instante de conexión ha sido seleccionado en el tiempo (t1), cuando la tensión tiene su máximo valor y la misma polaridad que la tensión del capacitor. Este procedimiento asegura que la conexión tiene lugar prácticamente sin fenómenos transitorios.
La desconexión del capacitor es acompañada por la suspensión de los pulsos de disparo de los tiristores, lo cual se efectúa en el instante en que la corriente pasa por cero (t2). En esta situación el capacitor mantiene una carga remanente asociada con el pico positivo o negativo de la tensión y queda preparado a la espera de una nueva conexión.
Este componente está caracterizado por lo siguiente:
• Control efectuado mediante pasos, no en forma continua.• Tiempo de demora para ejecutar la acción de comando enviada desde el regulador de aproximadamente medio ciclo (como máximo un ciclo).• No genera armónicas.
b) Reactor controlado por tiristores (TCR)
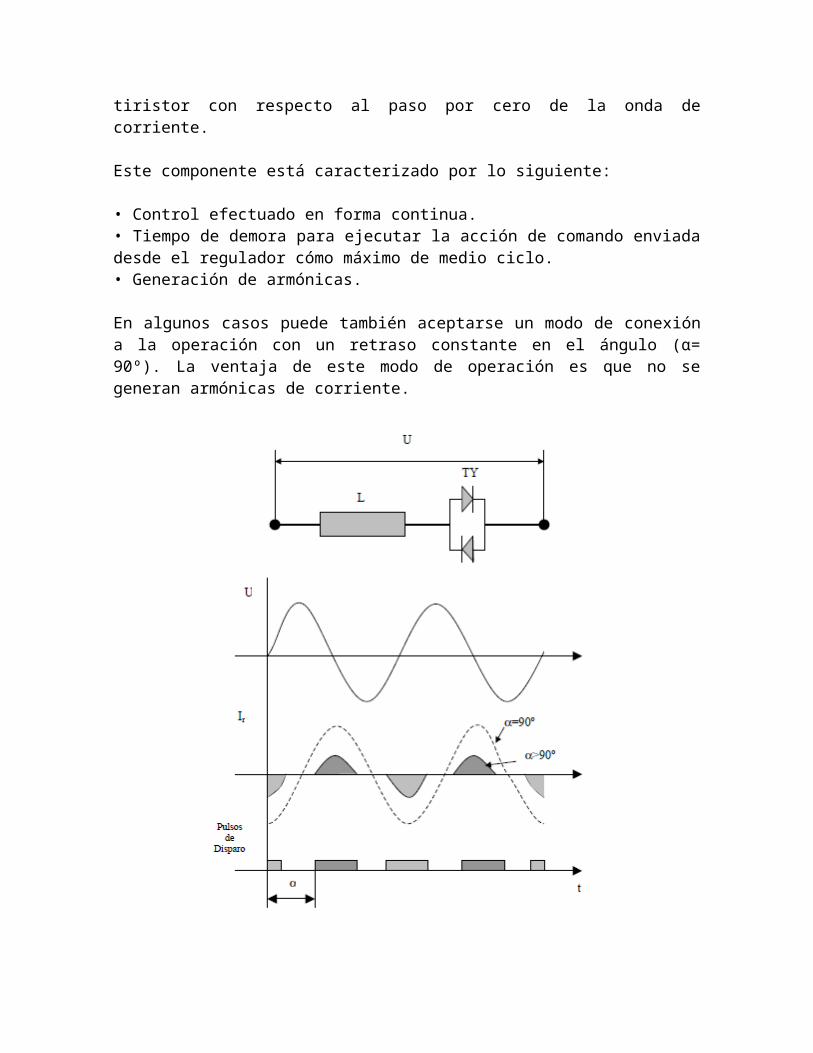
En la figura 2.5 se presenta un diagrama básico de un TCR. En ella se observa que este componente está también formado esencialmente por dos partes, el reactor “L” y el switch de conexión formado por un tiristor bidireccional TY. El control de la corriente y por lo tanto también la potencia se efectúa mediante la demora en el cierre del switch de conexión del tiristor con respecto al paso por cero de la onda de corriente.
Este componente está caracterizado por lo siguiente:
• Control efectuado en forma continua.• Tiempo de demora para ejecutar la acción de comando enviada desde el regulador cómo máximo de medio ciclo.• Generación de armónicas.
En algunos casos puede también aceptarse un modo de conexión a la operación con un retraso constante en el ángulo (α= 90º). La ventaja de este modo de operación es que no se generan armónicas de corriente.
Figura 2.5: Diagrama básico de un TSR y de su principio de funcionamiento
c) Esquemas representativos de compensadores estáticos controlados por tiristores (SVC)
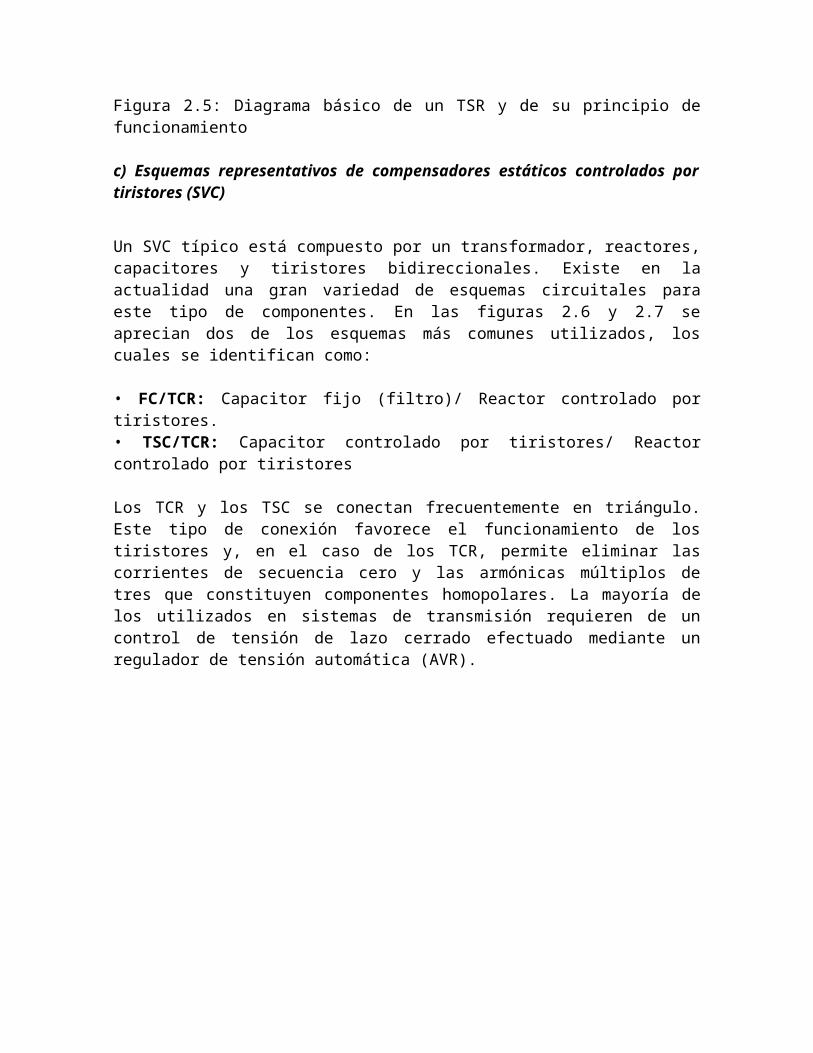
Un SVC típico está compuesto por un transformador, reactores, capacitores y tiristores bidireccionales. Existe en la actualidad una gran variedad de esquemas circuitales para este tipo de componentes. En las figuras 2.6 y 2.7 se aprecian dos de los esquemas más comunes utilizados, los cuales se identifican como:
• FC/TCR: Capacitor fijo (filtro)/ Reactor controlado por tiristores.• TSC/TCR: Capacitor controlado por tiristores/ Reactor controlado por tiristores
Los TCR y los TSC se conectan frecuentemente en triángulo. Este tipo de conexión favorece el funcionamiento de los tiristores y, en el caso de los TCR, permite eliminar las corrientes de secuencia cero y las armónicas múltiplos de tres que constituyen componentes homopolares. La mayoría de los utilizados en sistemas de transmisión requieren de un control de tensión de lazo cerrado efectuado mediante un regulador de tensión automática (AVR).
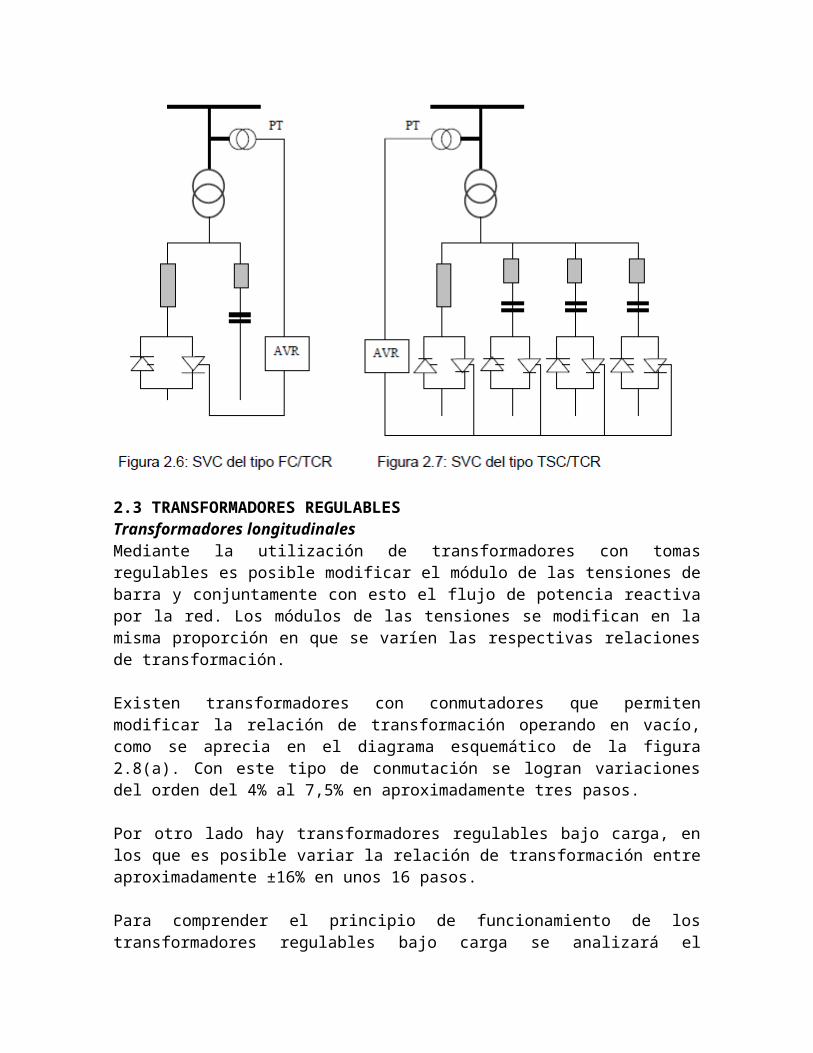
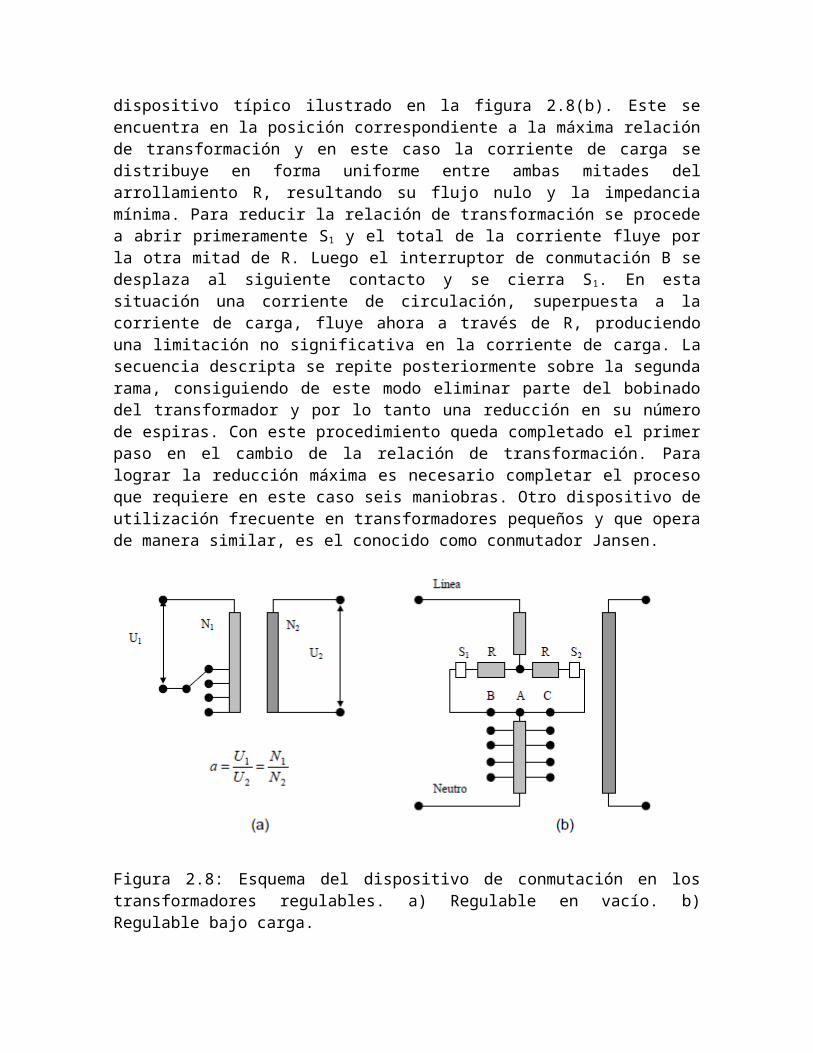
2.3 TRANSFORMADORES REGULABLESTransformadores longitudinalesMediante la utilización de transformadores con tomas regulables es posible modificar el módulo de las tensiones de barra y conjuntamente con esto el flujo de potencia reactiva por la red. Los módulos de las tensiones se modifican en la misma proporción en que se varíen las respectivas relaciones de transformación.
Existen transformadores con conmutadores que permiten modificar la relación de transformación operando en vacío, como se aprecia en el diagrama esquemático de la figura 2.8(a). Con este tipo de conmutación se logran variaciones del orden del 4% al 7,5% en aproximadamente tres pasos.
Por otro lado hay transformadores regulables bajo carga, en los que es posible variar la relación de transformación entre aproximadamente ±16% en unos 16 pasos.
Para comprender el principio de funcionamiento de los transformadores regulables bajo carga se analizará el dispositivo típico ilustrado en la figura 2.8(b). Este se encuentra en la posición correspondiente a la máxima relación de transformación y en este caso la corriente de carga se distribuye en forma uniforme entre ambas mitades del arrollamiento R, resultando su flujo nulo y la impedancia mínima. Para reducir la relación de transformación se procede a abrir primeramente S1 y el total de la corriente fluye por la otra mitad de R. Luego el interruptor de conmutación B se desplaza al siguiente contacto y se cierra S1. En esta situación una corriente de circulación, superpuesta a la corriente de carga, fluye ahora a través de R,
produciendo una limitación no significativa en la corriente de carga. La secuencia descripta se repite posteriormente sobre la segunda rama, consiguiendo de este modo eliminar parte del bobinado del transformador y por lo tanto una reducción en su número de espiras. Con este procedimiento queda completado el primer paso en el cambio de la relación de transformación. Para lograr la reducción máxima es necesario completar el proceso que requiere en este caso seis maniobras. Otro dispositivo de utilización frecuente en transformadores pequeños y que opera de manera similar, es el conocido como conmutador Jansen.
Figura 2.8: Esquema del dispositivo de conmutación en los transformadores regulables. a) Regulable en vacío. b) Regulable bajo carga.
Por lo general es necesario tener en cuenta lo siguiente:
• Las derivaciones de los devanados y los contactos para la regulación deben preverse para el lado de mayor tensión ya que soporta menores intensidades.• En el caso que ambos devanados estén conectados a barras de alta tensión, es conveniente que los contactos para la regulación estén en el arrollamiento correspondiente a la tensión variable.• La potencia entregada por el transformador generalmente es diferente en cada toma, suponiendo la corriente de carga constante. Tomando como ejemplo un transformador con regulación ±5%, se verifica:
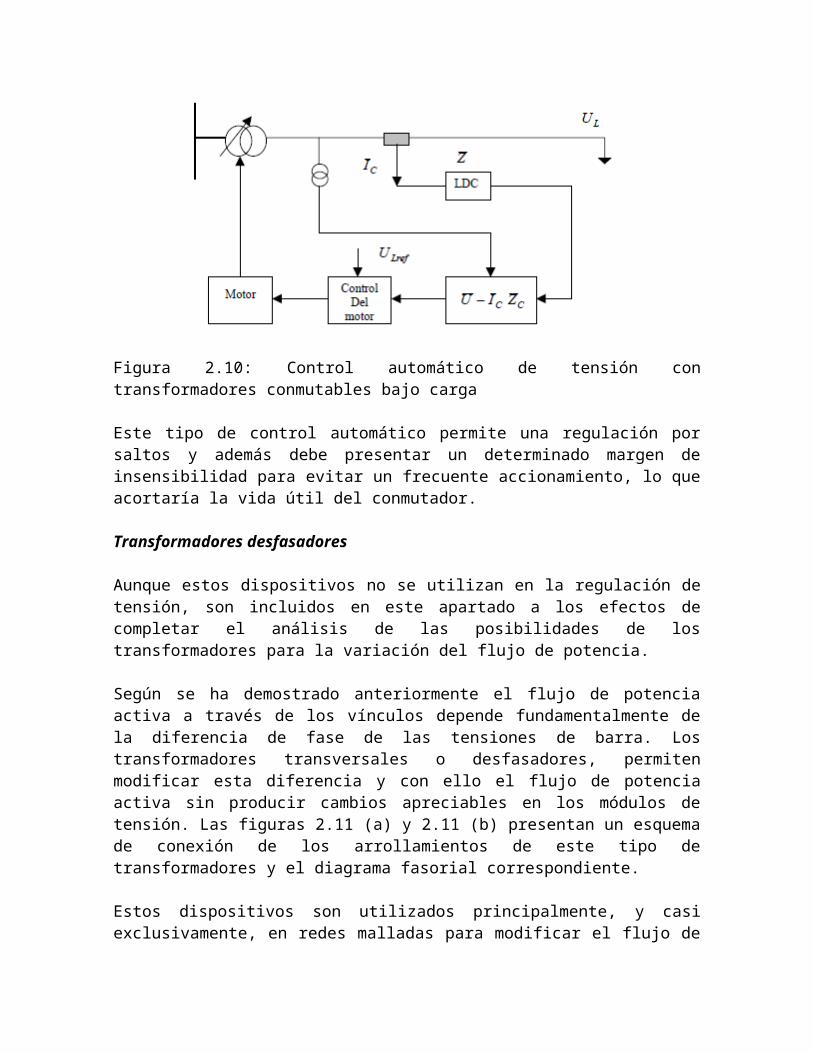
La posición del Tap puede ser variada, en algunos casos, mediante controladores automáticos como el mostrado en la figura 2.10. En este caso en particular el mecanismo de control presenta un bloque de compensación representativo de las caídas de tensión en la línea (LDC), el cual se incluye cuando se desea regular la tensión en una barra remota en distribuidores radiales. Este bloque permite
obtener una señal proporcional a la caída de tensión que presenta la línea hasta la barra remota que se desea controlar. El mecanismo de control posee también un transformador de tensión que entrega la señal de tensión a la salida del transformador regulable. Componiendo ambas señales mencionadas se puede calcular la tensión en la barra remota controlada y una vez comparada con la adoptada como referencia se origina la señal de corrección que se enviará al mecanismo de control del transformador regulable para mantener la tensión en el valor propuesto.
Figura 2.10: Control automático de tensión con transformadores conmutables bajo carga
Este tipo de control automático permite una regulación por saltos y además debe presentar un determinado margen de insensibilidad para evitar un frecuente accionamiento, lo que acortaría la vida útil del conmutador.
Transformadores desfasadores
Aunque estos dispositivos no se utilizan en la regulación de tensión, son incluidos en este apartado a los efectos de completar el análisis de las posibilidades de los transformadores para la variación del flujo de potencia.
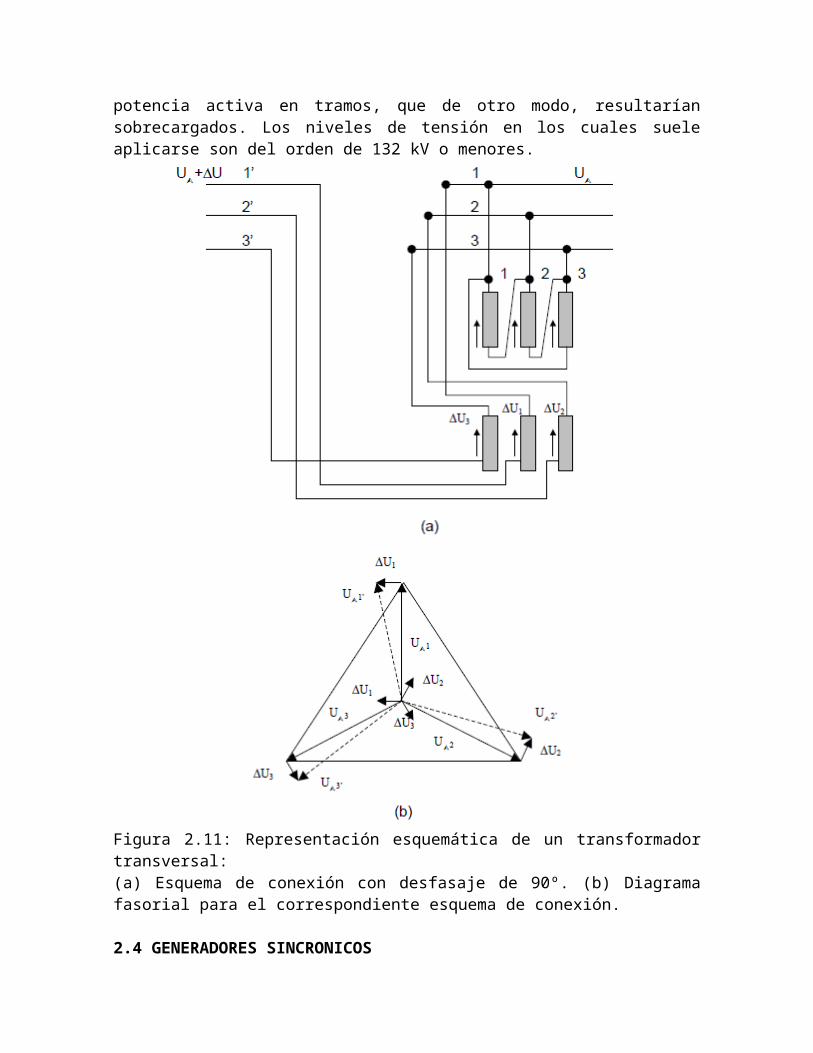
Según se ha demostrado anteriormente el flujo de potencia activa a través de los vínculos depende fundamentalmente de la diferencia de fase de las tensiones de barra. Los transformadores transversales o desfasadores, permiten modificar esta diferencia y con ello el flujo de potencia activa sin producir cambios apreciables en los módulos de tensión. Las figuras 2.11 (a) y 2.11 (b) presentan un esquema de conexión de los arrollamientos de este tipo de transformadores y el diagrama fasorial correspondiente.
Estos dispositivos son utilizados principalmente, y casi exclusivamente, en redes malladas para modificar el flujo de potencia activa en tramos, que de otro modo,
resultarían sobrecargados. Los niveles de tensión en los cuales suele aplicarse son del orden de 132 kV o menores.
Figura 2.11: Representación esquemática de un transformador transversal:(a) Esquema de conexión con desfasaje de 90º. (b) Diagrama fasorial para el correspondiente esquema de conexión.
2.4 GENERADORES SINCRONICOS
Control de la potencia activa y reactiva
El propósito de los generadores es fundamentalmente suministrar la potencia activa, proveer el control primario de tensión en los SSEE y tratar de mantener el balance de potencia reactiva deseado en las áreas adyacentes a la estación generadora.
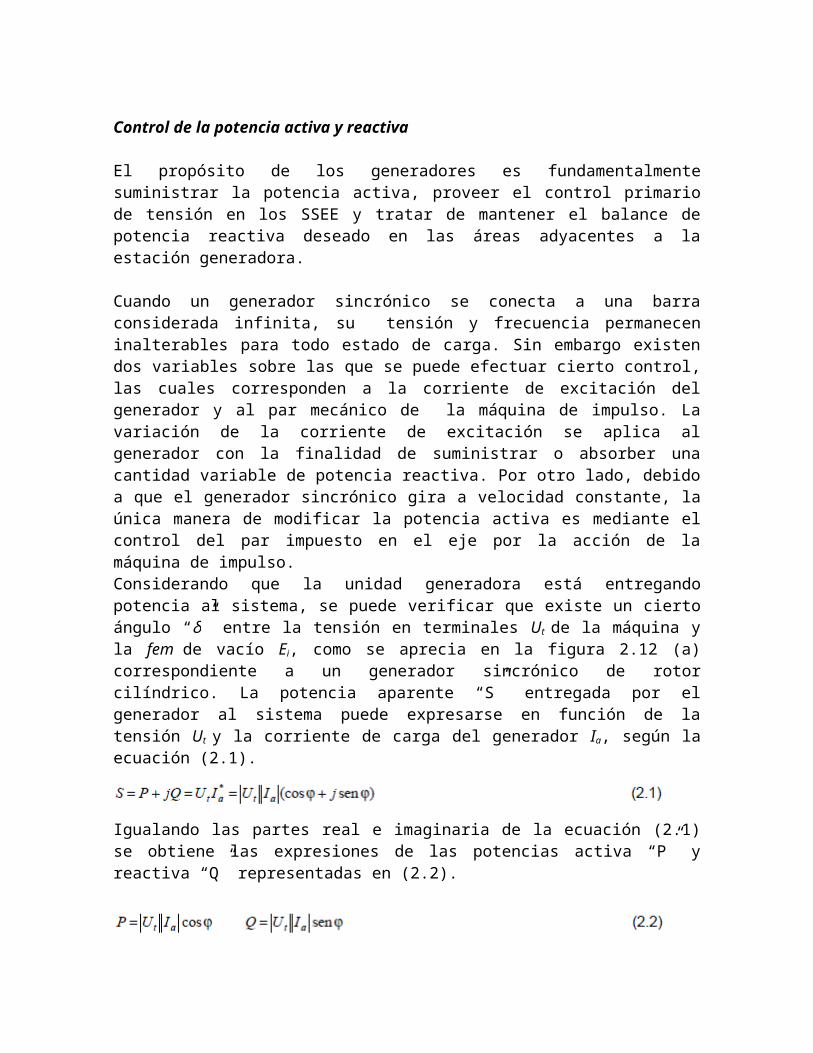
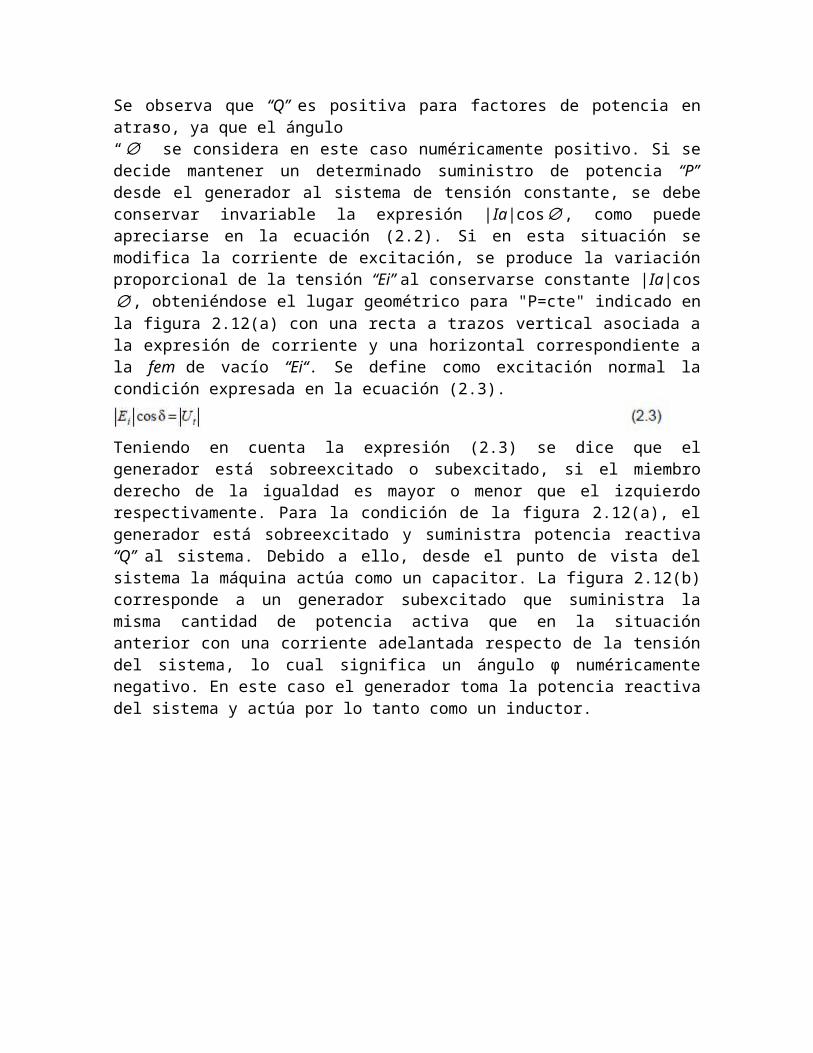
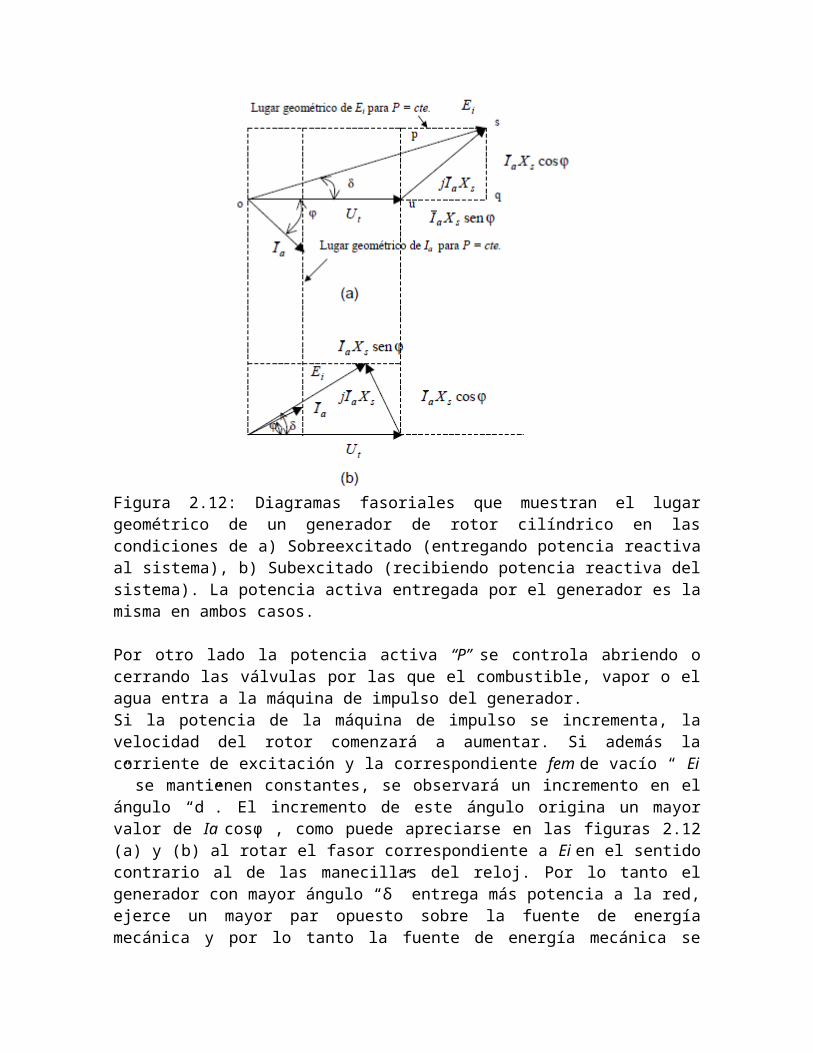
Cuando un generador sincrónico se conecta a una barra considerada infinita, su tensión y frecuencia permanecen inalterables para todo estado de carga. Sin embargo existen dos variables sobre las que se puede efectuar cierto control, las cuales corresponden a la corriente de excitación del generador y al par mecánico de la máquina de impulso. La variación de la corriente de excitación se aplica al generador con la finalidad de suministrar o absorber una cantidad variable de potencia reactiva. Por otro lado, debido a que el generador sincrónico gira a velocidad constante, la única manera de modificar la potencia activa es mediante el control del par impuesto en el eje por la acción de la máquina de impulso.Considerando que la unidad generadora está entregando potencia al sistema, se puede verificar que existe un cierto ángulo “δ” entre la tensión en terminales Ut de la máquina y la fem de vacío Ei, como se aprecia en la figura 2.12 (a) correspondiente a un generador sincrónico de rotor cilíndrico. La potencia aparente “S” entregada por el generador al sistema puede expresarse en función de la tensión Ut y la corriente de carga del generador Ia, según la ecuación (2.1).
Igualando las partes real e imaginaria de la ecuación (2.1) se obtiene las expresiones de las potencias activa “P” y reactiva “Q” representadas en (2.2).
Se observa que “Q” es positiva para factores de potencia en atraso, ya que el ángulo“∅ ” se considera en este caso numéricamente positivo. Si se decide mantener un determinado suministro de potencia “P” desde el generador al sistema de tensión constante, se debe conservar invariable la expresión |Ia|cos∅ , como puede apreciarse en la ecuación (2.2). Si en esta situación se modifica la corriente de excitación, se produce la variación proporcional de la tensión “Ei” al conservarse constante |Ia|cos∅ , obteniéndose el lugar geométrico para "P=cte" indicado en la figura 2.12(a) con una recta a trazos vertical asociada a la expresión de corriente y una horizontal correspondiente a la fem de vacío “Ei“. Se define como excitación normal la condición expresada en la ecuación (2.3).
Teniendo en cuenta la expresión (2.3) se dice que el generador está sobreexcitado o subexcitado, si el miembro derecho de la igualdad es mayor o menor que el izquierdo respectivamente. Para la condición de la figura 2.12(a), el generador está sobreexcitado y suministra potencia reactiva “Q” al sistema. Debido a ello, desde el punto de vista del sistema la máquina actúa como un capacitor. La figura
2.12(b) corresponde a un generador subexcitado que suministra la misma cantidad de potencia activa que en la situación anterior con una corriente adelantada respecto de la tensión del sistema, lo cual significa un ángulo ϕ numéricamente negativo. En este caso el generador toma la potencia reactiva del sistema y actúa por lo tanto como un inductor.
Figura 2.12: Diagramas fasoriales que muestran el lugar geométrico de un generador de rotor cilíndrico en las condiciones de a) Sobreexcitado (entregando potencia reactiva al sistema), b) Subexcitado (recibiendo potencia reactiva del sistema). La potencia activa entregada por el generador es la misma en ambos casos.
Por otro lado la potencia activa “P” se controla abriendo o cerrando las válvulas por las que el combustible, vapor o el agua entra a la máquina de impulso del generador.Si la potencia de la máquina de impulso se incrementa, la velocidad del rotor comenzará a aumentar. Si además la corriente de excitación y la correspondiente fem de vacío “ Ei ” se mantienen constantes, se observará un incremento en el ángulo “d”. El incremento de este ángulo origina un mayor valor de Ia cosϕ , como puede apreciarse en las figuras 2.12 (a) y (b) al rotar el fasor correspondiente a Ei en el sentido contrario al de las manecillas del reloj. Por lo tanto el generador con mayor ángulo “δ” entrega más potencia a la red, ejerce un mayor par opuesto sobre la fuente de energía mecánica y por lo tanto la fuente de energía mecánica se restablece a la velocidad que corresponde a la frecuencia de la barra infinita.Teniendo en cuenta lo mencionado en este punto y lo presentado en el apartado
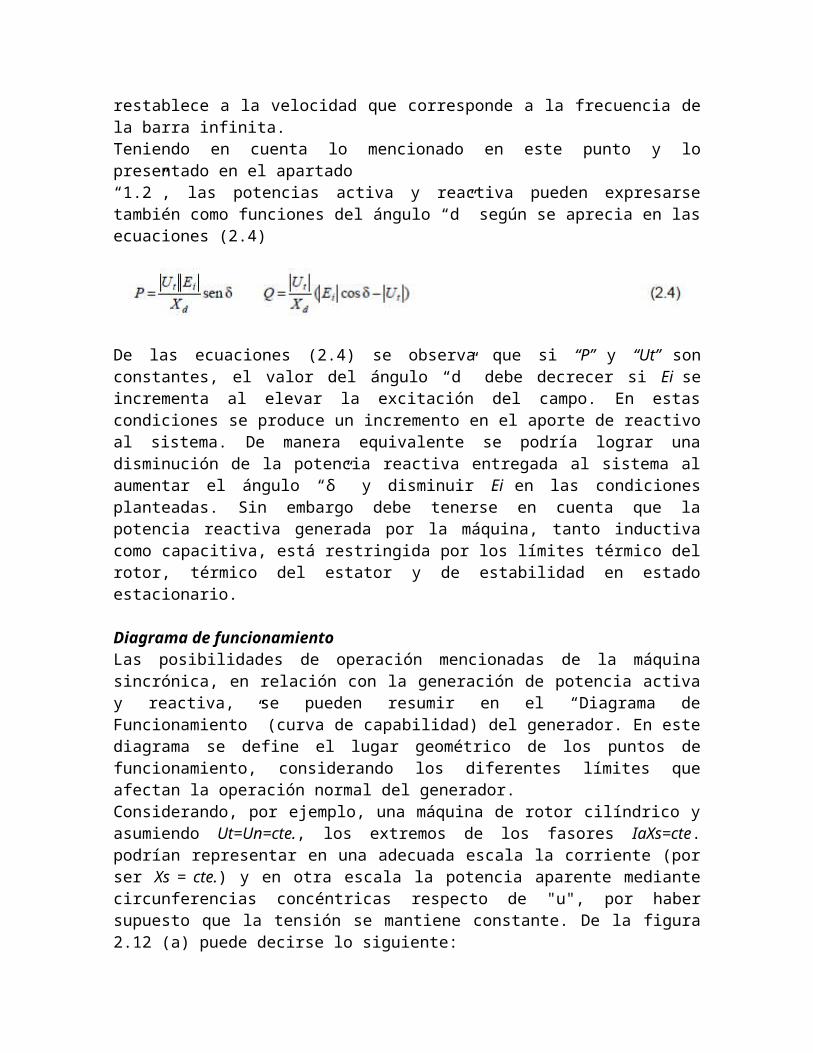
“1.2”, las potencias activa y reactiva pueden expresarse también como funciones del ángulo “d” según se aprecia en las ecuaciones (2.4)
De las ecuaciones (2.4) se observa que si “P” y “Ut” son constantes, el valor del ángulo “d” debe decrecer si Ei se incrementa al elevar la excitación del campo. En estas condiciones se produce un incremento en el aporte de reactivo al sistema. De manera equivalente se podría lograr una disminución de la potencia reactiva entregada al sistema al aumentar el ángulo “δ” y disminuir Ei en las condiciones planteadas. Sin embargo debe tenerse en cuenta que la potencia reactiva generada por la máquina, tanto inductiva como capacitiva, está restringida por los límites térmico del rotor, térmico del estator y de estabilidad en estado estacionario.
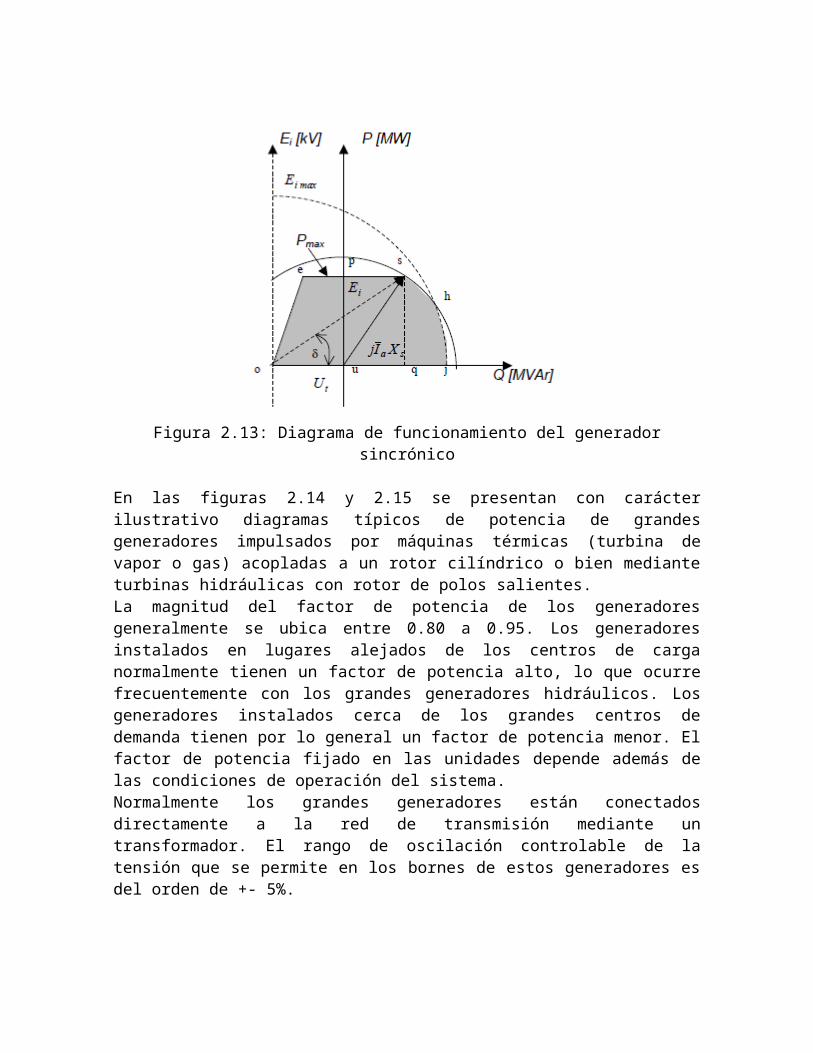
Diagrama de funcionamientoLas posibilidades de operación mencionadas de la máquina sincrónica, en relación con la generación de potencia activa y reactiva, se pueden resumir en el “Diagrama de Funcionamiento” (curva de capabilidad) del generador. En este diagrama se define el lugar geométrico de los puntos de funcionamiento, considerando los diferentes límites que afectan la operación normal del generador.Considerando, por ejemplo, una máquina de rotor cilíndrico y asumiendo Ut=Un=cte., los extremos de los fasores IaXs=cte. podrían representar en una adecuada escala la corriente (por ser Xs = cte.) y en otra escala la potencia aparente mediante circunferencias concéntricas respecto de "u", por haber supuesto que la tensión se mantiene constante. De la figura 2.12 (a) puede decirse lo siguiente:• El segmento “u-s” es proporcional a la potencia aparente: S=UnIa [MVA]• El segmento “u-q” es proporcional a la potencia reactiva: Q = I aUt sen ϕ [MVAr]• El segmento “u-p” es proporcional a la potencia activa: P = I aUt cosϕ [MW]En forma análoga los puntos correspondientes a “Ei” constante son circunferencias concéntricas con centro en “o”.
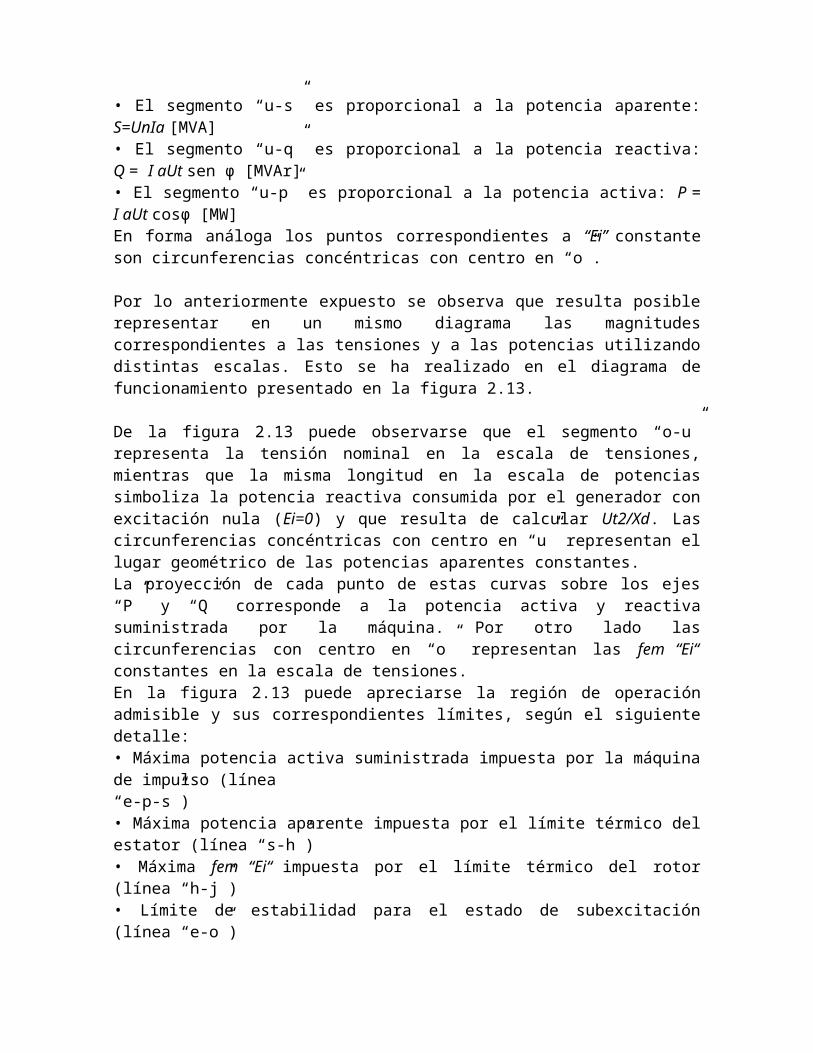
Por lo anteriormente expuesto se observa que resulta posible representar en un mismo diagrama las magnitudes correspondientes a las tensiones y a las potencias utilizando distintas escalas. Esto se ha realizado en el diagrama de funcionamiento presentado en la figura 2.13.
De la figura 2.13 puede observarse que el segmento “o-u” representa la tensión nominal en la escala de tensiones, mientras que la misma longitud en la escala de potencias simboliza la potencia reactiva consumida por el generador con excitación nula (Ei=0) y que resulta de calcular Ut2/Xd. Las circunferencias concéntricas con centro en “u” representan el lugar geométrico de las potencias aparentes constantes.
La proyección de cada punto de estas curvas sobre los ejes “P” y “Q” corresponde a la potencia activa y reactiva suministrada por la máquina. Por otro lado las circunferencias con centro en “o” representan las fem “Ei“ constantes en la escala de tensiones.En la figura 2.13 puede apreciarse la región de operación admisible y sus correspondientes límites, según el siguiente detalle:• Máxima potencia activa suministrada impuesta por la máquina de impulso (línea“e-p-s”)• Máxima potencia aparente impuesta por el límite térmico del estator (línea “s-h”)• Máxima fem “Ei“ impuesta por el límite térmico del rotor (línea “h-j”)• Límite de estabilidad para el estado de subexcitación (línea “e-o”)
Figura 2.13: Diagrama de funcionamiento del generador sincrónico
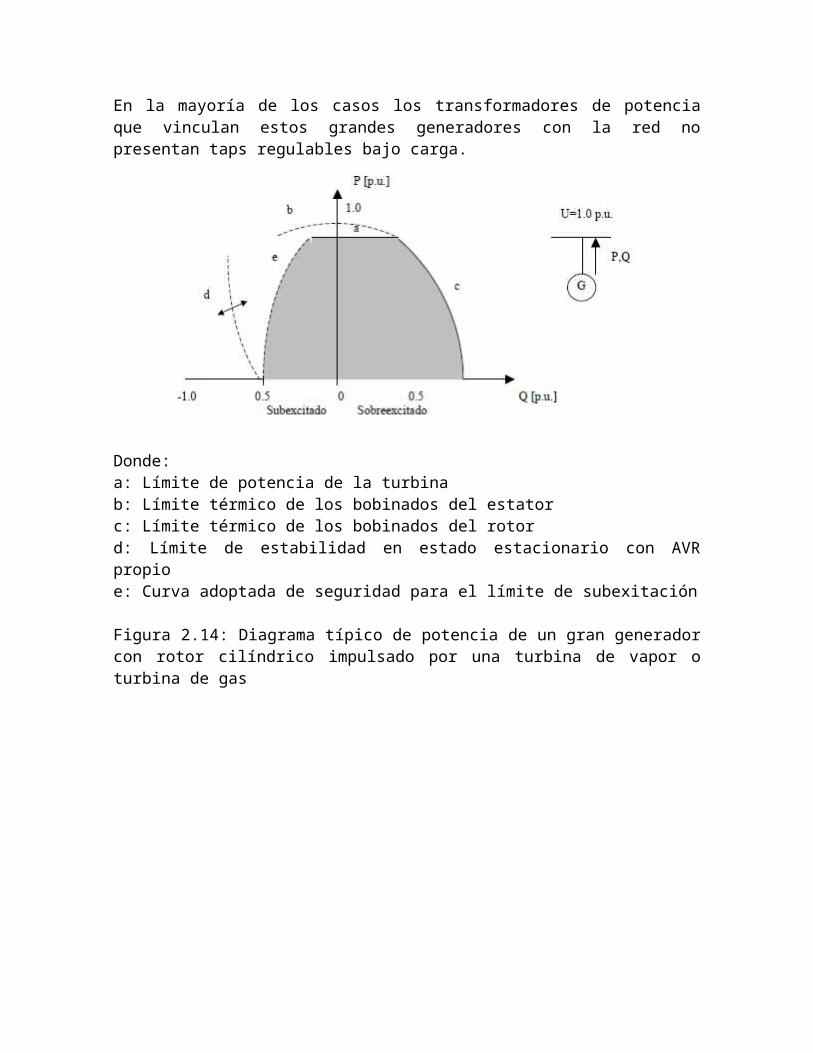
En las figuras 2.14 y 2.15 se presentan con carácter ilustrativo diagramas típicos de potencia de grandes generadores impulsados por máquinas térmicas (turbina de vapor o gas) acopladas a un rotor cilíndrico o bien mediante turbinas hidráulicas con rotor de polos salientes.La magnitud del factor de potencia de los generadores generalmente se ubica entre 0.80 a 0.95. Los generadores instalados en lugares alejados de los centros de carga normalmente tienen un factor de potencia alto, lo que ocurre frecuentemente con los grandes generadores hidráulicos. Los generadores instalados cerca de los grandes centros de demanda tienen por lo general un factor de potencia menor. El factor de potencia fijado en las unidades depende además de las condiciones de operación del sistema.Normalmente los grandes generadores están conectados directamente a la red de transmisión mediante un transformador. El rango de oscilación controlable de la tensión que se permite en los bornes de estos generadores es del orden de +- 5%.En la mayoría de los casos los transformadores de potencia que vinculan estos grandes generadores con la red no presentan taps regulables bajo carga.

Donde:a: Límite de potencia de la turbinab: Límite térmico de los bobinados del estatorc: Límite térmico de los bobinados del rotord: Límite de estabilidad en estado estacionario con AVR propioe: Curva adoptada de seguridad para el límite de subexitación
Figura 2.14: Diagrama típico de potencia de un gran generador con rotor cilíndrico impulsado por una turbina de vapor o turbina de gas
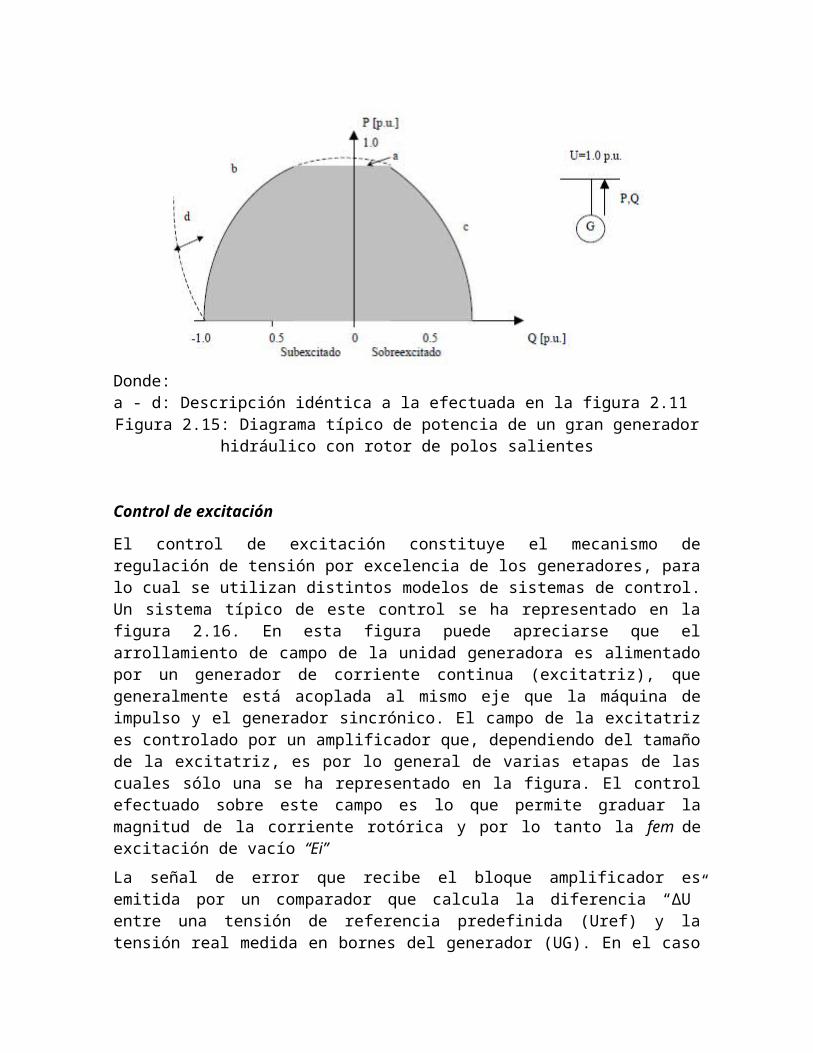
Donde:a - d: Descripción idéntica a la efectuada en la figura 2.11Figura 2.15: Diagrama típico de potencia de un gran generador hidráulico con rotor
de polos salientes
Control de excitación
El control de excitación constituye el mecanismo de regulación de tensión por excelencia de los generadores, para lo cual se utilizan distintos modelos de sistemas de control. Un sistema típico de este control se ha representado en la figura 2.16. En esta figura puede apreciarse que el arrollamiento de campo de la unidad generadora es alimentado por un generador de corriente continua (excitatriz), que generalmente está acoplada al mismo eje que la máquina de impulso y el generador sincrónico. El campo de la excitatriz es controlado por un amplificador que, dependiendo del tamaño de la excitatriz, es por lo general de varias etapas de las cuales sólo una se ha representado en la figura. El control efectuado sobre este campo es lo que permite graduar la magnitud de la corriente rotórica y por lo tanto la fem de excitación de vacío “Ei”
La señal de error que recibe el bloque amplificador es emitida por un comparador que calcula la diferencia “ΔU” entre una tensión de referencia predefinida (Uref) y la tensión real medida en bornes del generador (UG). En el caso en que “UG” sea menor que la tensión de referencia se origina una señal de error que al ser amplificada produce un aumento en el campo de la excitatriz, causando el crecimiento de la corriente rotórica y por lo tanto el de la fem de excitación “Ei”. Al efectuarse el procedimiento mencionado la tensión “UG“ se aproxima a la tensión de referencia “Uref” y desaparece por lo tanto la señal de error.En la figura 2.16 se observa además un transformador estabilizador que tiene por finalidad evitar que el sistema se comporte en forma inestable en la medida que la frecuencia de las oscilaciones de la señal de error aumentan.
Figura 2.16: Esquema constructivo básico del regulador de tensión de un generador sincrónico.
3. COMPENSACION DE POTENCIA REACTIVA EN SISTEMAS DESUBTRANSMISION Y DISTRIBUCIÓN EN ESTADOESTACIONARIO
Es necesario suministrar potencia reactiva a los sistemas de subtransmisión y distribución para compensar el consumo de dicha potencia vinculada a las cargas y a la propia red. El suministro de potencia reactiva puede efectuarse por una o más de las siguientes formas:• Desde la red de transmisión.• Mediante posible compensadores sincrónicos dentro del sistema de distribución.• Utilizando capacitores shunt.• Mediante compensadores estáticosLa necesidad de absorber el exceso de potencia reactiva que puede generarse en el sistema ocurre con muy poca frecuencia.Muchas empresas vinculadas al suministro de energía eléctrica presentan restricciones para suministrar potencia reactiva desde los sistemas de transmisión hacia los de distribución. Esto se ve reflejado con frecuencia en las tarifas de suministro a grandes consumidores, tales como las empresas de distribución o grandes consumidores industriales, los cuales presentan penalizaciones por su bajo factor de potencia.En condiciones normales de operación en estado estacionario la tensión en bornes de los consumidores debiera estar dentro de cierto rango alrededor de la tensión nominal. Los límites de variación dependen fundamentalmente, entre otras causas, de las legislaciones establecidas en los diferentes países y del tipo de servicio que se brinda. Generalmente el rango adoptado para definir estos límites en la tensión oscila entre el +-5% al +-10%, respecto de la tensión nominal.
En el nivel de distribución la compensación se aplica fundamentalmente con el propósito de corregir el factor de potencia de las cargas. Las empresas prestatarias del servicio de distribución exigen a los usuarios o inducen con su política tarifaria, un cosϕ que debe superar un mínimo. Debido a ello los usuarios efectúan la compensación del mismo en el nivel de sus cargas. Las empresas por su parte compensan en las principales estaciones transformadoras, generalmente en los nodos de subtransmisión.La corrección del factor de potencia se realiza con frecuencia en este tipo de sistemas mediante la conexión de capacitores shunt fijos. Con la utilización de esta compensación se persigue uno o más de los siguientes objetivos.• Reducir los costos de potencia tratando de evitar los factores de penalización causados por utilizar bajo factor de potencia. Reducir las pérdidas activas (I2 R) y reactivas (I2 X) en la red de distribución.• Descargar fundamentalmente transformadores y cables y también en los casos que corresponda las líneas aéreas.• Incrementar los niveles de tensión y en el caso en que se conecten capacitores shunt mejorar la regulación de tensión, reduciendo las variaciones de tensión causadas por las oscilaciones de la demanda entre valle y pico.
En muchos de los sistemas existentes cuando se logran satisfacer los dos últimos objetivos mencionados, se consigue posponer o bien, en algunos casos, eliminar grandes inversiones necesarias en nuevos equipamientos.El control efectuado con la conexión de capacitores shunt puede llevarse a cabo mediante una gran cantidad de formas ya sea manuales o automáticas. Entre las automáticas se pueden mencionar los equipamientos con temporizadores o bien con mecanismos de control de tensión, corriente, potencia reactiva o factor de potencia.
3.1 SISTEMAS DE ZONAS RESIDENCIALES Y RURALES
Existen muchas configuraciones diferentes y niveles de tensión vinculados a estos sistemas. El nivel de tensión y su regulación se consideran normalmente cuando se dimensionan los circuitos de distribución correspondientes. El control de tensión se puede efectuar mediante cambio en la posición de los taps en los transformadores regulables ubicados en las subestaciones de distribución. En la medida que se incrementa la carga con el transcurso del tiempo generalmente se eleva el nivel de tensión en el lado del secundario del transformador con la finalidad de compensar el aumento en la caída de tensión causada en los distribuidores. En algunos casos de distribuidores de gran longitud los transformadores de las subestaciones poseen reguladores automáticos de tensión (transformadores booster).
Los capacitores shunt son también muy utilizados en estos sistemas de distribución, para satisfacer los objetivos mencionados anteriormente, incluyendo en algunos casos el control de tensión.En sistemas rurales puede incluirse también como elemento de compensación los capacitores serie.
3.2 SISTEMAS INDUSTRIALES DE ALTA POTENCIA
Muchas plantas industriales de envergadura compran energía en niveles de tensión de 13,2 kV o superiores. Los sistemas de distribución tienen generalmente al menos dos niveles de tensión, un valor de tensión media (por ejemplo 13,2 kV) para la distribución primaria y otro de menor tensión (por ejemplo 380 V) para el resto de las cargas.Los motores de inducción y las lámparas fluorescentes sin compensación son cargas con consumo relevante de potencia reactiva. Los hornos de arco en empresas de fundición presentan un valor promedio elevado de consumo de potencia reactiva sujeta a importantes y rápidas fluctuaciones.El control de tensión en el nivel primario se alcanza generalmente mediante los taps de los transformadores. En el caso de que existan generadores en este sector de la red, evidentemente son utilizados para suministrar el reactivo necesario y para efectuar un control fino de la tensión. En muy pocos casos existen pequeños compensadores sincrónicos.El empleo de capacitores shunt fijos para la corrección del factor de potencia se efectúa con frecuencia en sistemas industriales, por las razones previamente expuestas. En la figura 3.1 se ilustran diferentes aplicaciones de este tipo de
compensación. En las posiciones "A" y "B" se observan estaciones de compensación del sistema, mientras que en las posiciones "C" y "D" se observan respectivamente compensaciones para grupos de motores o para alguno en forma particular.Los hornos de arco utilizados normalmente en las fundiciones producen armónicos de corriente, los cuales deben ser considerados durante la planificación y diseño de las instalaciones de compensación de los capacitores shunt. En muchos casos esta compensación es utilizada para ambas funciones, generación de potencia reactiva en la frecuencia fundamental y filtrado de las armónicas de corriente. En la figura 3.1 en la posición "E" se puede también apreciar este tipo de compensación.
Figura 3.1: Zona industrial con diferentes ubicaciones de capacitores shunt
Con la finalidad de poder analizar el comportamiento del consumo de potencia reactiva en estado estacionario de diferentes tipos de demandas, se considerará una modelación utilizada en algunas herramientas de cálculo disponibles en el mercado.Se considerará también para completar la representación de la demanda los aspectos de la modelación vinculados con la potencia activa.Dentro de esta modelación es fundamental considerar la sensibilidad de la carga con la tensión. A pesar que algunas cargas son también sensibles con la frecuencia, los cambios que usualmente ocurren en la tensión son mucho mayores que los de la frecuencia. Se debe destacar también que la sensibilidad de la frecuencia no se encuentra relacionada directamente con la estabilidad e tensión.
La respuesta de las cargas a los cambios de tensión que se mantienen durante algunos minutos puede afectar, como se mencionó anteriormente, la estabilidad de tensión del sistema.
En el caso de variaciones muy lentas de tensión en el sistema, el modelo de potencia constante (independiente de la tensión) es aceptable. En algunos sistemas hay suficientes componentes de control para mantener constante la carga y por lo tanto las características de variación que puede presentar la misma carece de importancia hasta que los elementos de control alcancen sus límites.En los estudios en estado estacionario de los sistemas de gran envergadura se representa la carga en forma razonable mediante modelos de potencia constante en el lado de alta tensión de las estaciones transformadoras de suministro del sistema eléctrico. En este modelo se supone que la sensibilidad que presenta la carga con la tensión se puede compensar con la actuación de los elementos de control disponibles, tal como los taps de los transformadores regulables.
En sistemas de subtransmisión y distribución, sin embargo, la falta de disponibilidad de suficientes elementos de compensación requieren que las cargas sean modeladas considerando los efectos de las variaciones de tensión y eventualmente de frecuencia.
Un modelo utilizado en algunas herramientas de cálculo que contemple la sensibilidad de la demanda con la tensión y la frecuencia para estudios en estado estacionario, se puede representar por las expresiones exponenciales (3.1) y (3.2).
Donde:PNL ,QNL : Potencias nominales activa y reactiva de la carga.UN : Tensión nominal del sistema.f N : Frecuencia nominal del sistema.Pv , Pf : Coeficientes de la representación exponencial de la potencia "activa"asociados a la variación de tensión y frecuencia respectivamente.Qv ,Qf : Coeficientes de la representación exponencial de la potencia "reactiva" asociados a la variación de tensión y frecuencia respectivamente.
La validez de las expresiones (3.1) y (3.2) en estado estacionario se verifica siempre que las oscilaciones de tensión sean inferiores al 10% aproximadamente. Esta modelación puede resultar inadecuada para cargas motóricas y lámparas de descarga en situaciones en que las desviaciones de tensión sean superiores a las mencionadas.En la tabla 3.1 se incluye un detalle de los factores de potencia (FP) asociados a las cargas más usuales que se presentan en este tipo de sistemas, el valor de los exponentes del modelo exponencial vinculados a la variación de tensión y frecuencia y el porcentaje de la carga de características motóricas. Seguidamente
se presentan también en esta tabla los mismos parámetros mencionados pero los correspondientes a la parte de la carga que no presenta características motóricas.
Tabla 3.1: Características en estado estacionario de los componentes de carga.
4. ESTABILIDAD DE TENSIÓN Y COLAPSO DE TENSIONES
4.1 PRESENTACION GENERAL DEL PROBLEMA
Estabilidad de tensión se interpreta a la capacidad que presenta un sistema de potencia para mantener un estado aceptable de tensiones en todas las barras del sistema tanto en condiciones de operación normal como luego de haber soportado una perturbación. Un sistema entra en un estado de tensión inestable cuando una perturbación, incremento en la demanda o cambio en las condiciones del sistema causa una progresiva y descontrolada caída de tensión. El principal factor causante de inestabilidad es la falta de capacidad del sistema para satisfacer la demanda de potencia reactiva. La clave del problema es usualmente la caída de tensión que ocurre cuando el flujo de potencia activa y reactiva circula a través de una reactancia inductiva representativa con la red de transmisión.Un criterio para la estabilidad de tensión es que, a partir de condiciones de operación para cada barra en el sistema, la magnitud de tensión en las barras aumenta en la medida que la inyección de potencia reactiva en la misma barra sea incrementada. Un sistema presenta inestabilidad de tensión si para al menos una barra en el sistema, la magnitud de tensión (V) de la barra disminuye en la medida que la inyección de potencia reactiva (Q) en la misma barra se incrementa. En otras palabras, un sistema es estable en tensión si la sensibilidad V-Q es positiva para cada barra y de igual manera es inestable en tensión si dicha sensibilidad es negativa para al menos una barra.Caídas progresivas en la tensión de barras pueden también asociarse con la salida de sincronismo de los ángulos del rotor. Por ejemplo, la pérdida gradual de sincronismo de las máquinas como los ángulos del rotor entre dos grupos de máquinas que se aproxima o excede los 180º, originan en puntos intermedios de la red una muy baja tensión. En contraposición, los tipos de caída de tensión en forma sostenida que están relacionados con la inestabilidad de tensión, ocurren cuando la estabilidad del ángulo del rotor no es un problema.La inestabilidad de tensión es esencialmente un fenómeno local, sin embargo sus consecuencias pueden tener un impacto extenso.
Colapso de tensiones, por otro lado, es una situación más compleja del sistema que una simple inestabilidad de tensiones y es usualmente el resultado de una secuencia de eventos que acompañan a la inestabilidad de tensión conduciendo al sistema a un perfil bajo de tensiones en una significativa parte del mismo.La inestabilidad de tensiones puede ocurrir en diferentes formas. En su forma más simple se puede ilustrar considerando los dos extremos de la red de la figura 4.1. En ella se ha supuesto una fuente de tensión constante (Es) que suministra energía a la carga (ZLD) a través de una impedancia en serie (ZLN). Esto podría representar una alimentador radial simple que suministra energía de un sistema grande a una carga o un área de cargas a través de una línea de transmisión.La expresión para la corriente asociada a la red de la figura 4.1 se puede apreciar en la siguiente ecuación:
Donde I_ y S E_ son fasores y las impedancias se pueden representar como:
Figura 4.1: Sistema radial simple para ilustración de fenómenos de estabilidad detensión.
El módulo de la corriente del sistema puede expresarse como:
La representación gráfica de R R I, V y P en función de LN LD Z Z se muestra en la figura 4.2, para el caso de un sistema con una tanθ = 10,0 y cosφ = 0,95. Para poder hacer extensivos los resultados para cualquier valor de LN Z , los valores deR R I, V y P se pueden normalizar.La demanda se incrementa en la medida que disminuye LD Z y como consecuencia R P aumenta en una primera instancia rápidamente y luego lo hace en forma más lenta hasta alcanzar un máximo, después del cual esta potencia comienza a disminuir. Existe por lo tanto un valor máximo de potencia activa que puede transmitirse a través de una impedancia desde una fuente de tensión constante.
La potencia transmitida es máxima cuando la caída de tensión en la línea es igual en magnitud a R V , que se verifica en la situación en que = 1 LN LD Z Z . De la figura 4.2 puede observarse que en la medida que LD Z disminuye gradualmente, la corriente I aumenta y R V también disminuye. Inicialmente, con valores elevados de LD Z el incremento en la corriente I predomina sobre la disminución de R V y por lo tanto R P se incrementa rápidamente con la disminución de LD Z .
Cuando LD Z se aproxima a LN Z el efecto de aumento de I es más suave que el de disminución de R V , originando un aumento más lento en R P . Cuando LD Z es menor que LN Z la disminución en R V domina sobre el incremento en I, y por lo tanto el efecto neto es una disminución en R P .
La condición de operación crítica correspondiente a la máxima potencia representa el límite de la operación satisfactoria. Para elevadas demandas el control de potencia por variación de la carga resulta inestable, es decir que una disminución en la impedancia de carga reduce la potencia transmitida. En este caso la tensión disminuye progresivamente y el sistema se vuelve inestable, dependiendo de las características de carga. Con una característica estática de la carga de impedancia constante, el sistema se estabiliza en niveles de potencia y tensión inferiores al deseado. Por el otro lado, con una característica de potencia constante el sistema se vuelve inestable hacia un colapso de la tensión en las barras de carga. Con otros tipos de carga, la tensión se determina por las características compuestas de la línea de transmisión y la carga. Si la carga se suministra por transformadores con regulación automática bajo carga, la acción del tap del transformador consistirá en buscar alcanzar la tensión correspondiente a la carga. Esto tiene el efecto de reducir la impedancia efectiva de carga, desde el punto de vista del sistema. Estas acciones se traducen en reducciones adicionales de R V y en una reducción de tensión progresiva. Este es un simple ejemplo de inestabilidad de tensión.
Desde el punto de vista de estabilidad de tensión, es de fundamental importancia considerar la relación entre R P y R V . Esta relación puede observarse en la figura 4.3 aplicada al sistema considerado cuando la carga posee un factor de potencia de 0,95 en atraso.
A partir de las ecuaciones 4.3 y 4.4 puede observarse que el factor de potencia de la carga presenta un efecto significativo en la característica Potencia-Tensión del sistema. Esto es una consecuencia debido a que la caída de tensión en la línea de transmisión depende tanto de la potencia activa como reactiva transferida a la carga.
La estabilidad de tensión por lo tanto dependen de las relaciones entre P, Q y V. La tradicional representación de estas relaciones, pueden observarse en las figuras 4.4 y 4.5.
La figura 4.4 permite apreciar para el sistema correspondiente a la figura 4.1 las curvas entre R P - R V para diferentes valores del factor de potencia correspondiente a de la carga. La ubicación de los puntos de operación críticos se indican en la figura mediante una línea de puntos. Normalmente, sólo los puntos de operación por encima de los puntos críticos representan las condiciones de operación satisfactorias. Una reducción repentina del factor de potencia (incremento en R Q ) puede luego causar que el sistema cambie desde una condición de operación estable hacia una insatisfactoria y posiblemente inestable representada por las condiciones de operación correspondientes a la parte inferior de la curva V-P.
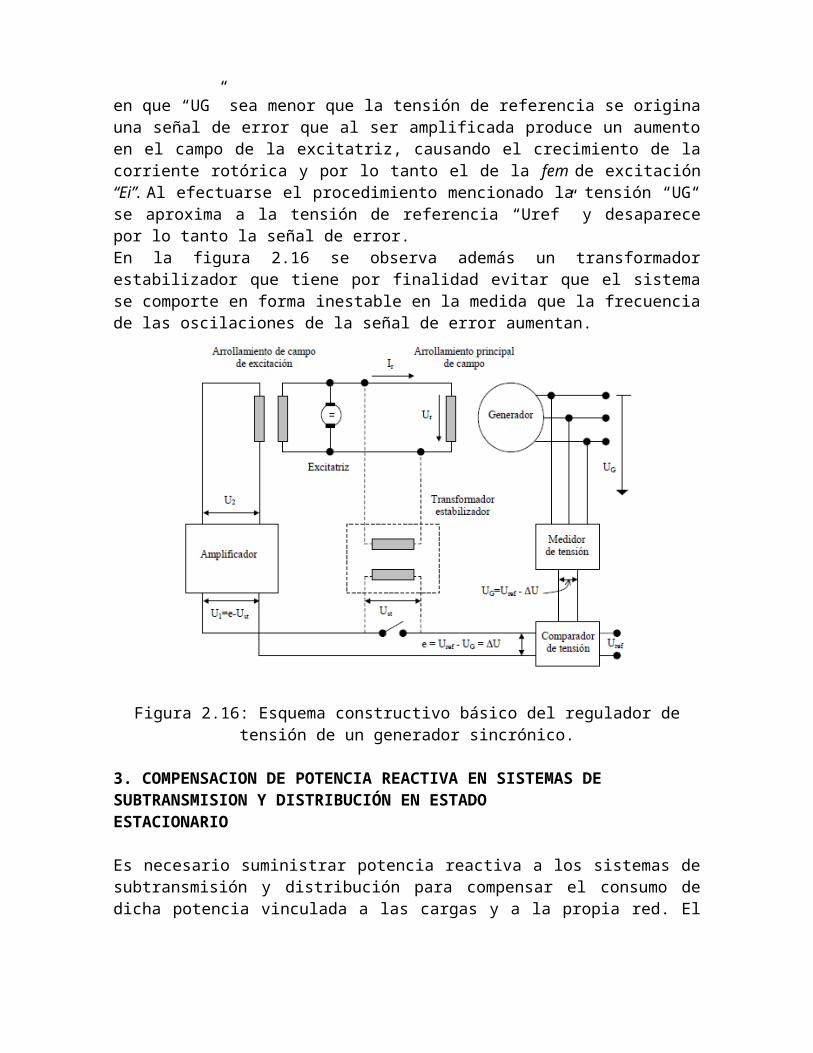
Figura 4.4: Características R V - R P del sistema correspondiente a la figura 4.1 con diferentes factores de potencia.
Figura 4.5: Características R V - R Q del sistema correspondiente a la figura 4.1 con diferentes relaciones R RMAX P / P .
La influencia de las características de potencia reactiva de los componentes en el extremo receptor (cargas y componentes de compensación) se ha representado en la figura 4.5. Esto muestra una familia de curvas aplicable al sistema de potencia de la figura 4.1, cada una de las cuales representa la relación entre R V y R Q para valores fijos de R P . El sistema es estable en la región donde se verifica que la derivada R R ∂Q / ∂V es positiva. El límite de estabilidad de tensión (punto de operación crítico) se alcanza cuando la derivada se hace cero. Por lo tanto, el sector de las curvas Q-V ubicadas a la derecha del mínimo representan la operación estable y el correspondiente a la izquierda representan la operación inestable. Una operación estable en la región donde R R ∂Q / ∂V adopta valores
negativos, puede alcanzarse solamente con una compensación de potencia reactiva regulada disponiendo de suficiente rango de control y una elevada ganancia Q/V con una polaridad opuesta a la normal.La descripción mencionada del fenómeno de estabilidad de tensión, realizada solamente en un nivel básico, intenta brindar los elementos de juicio necesarios para ayudar a la clasificación y entendimiento de diferentes aspectos de la estabilidad del sistema de potencia. El análisis se limitó a un sistema radial, porque es una forma más simple y clara de graficar el problema de estabilidad de tensión. En los complejos sistemas de potencia reales muchos factores contribuyen al proceso de colapso del sistema causado por la inestabilidad de tensión, entre los cuales se pueden mencionar la confiabilidad de los sistemas de transmisión, los niveles de transferencia de potencia, las características de carga, los límites de capacidad de potencia reactiva de los generadores y las características de potencia reactiva de los componentes de compensación. En algunos casos, el problema se origina por una composición de acciones no coordinadas de varios controles y sistemas de protección.
Con el propósito de analizar el fenómeno estabilidad de tensiones, es útil efectuar una clasificación en las dos subclases siguientes:
a) Estabilidad de tensión de grandes perturbaciones: Este fenómeno está relacionado con la capacidad del sistema para controlar tensiones luego de perturbaciones grandes tales como una falla del sistema, pérdida de generación o contingencias de circuitos. Esta capacidad está determinada por las características de carga del sistema, la interacción de los controles continuos y discretos y las protecciones. La determinación de la estabilidad para grandes perturbaciones requiere un examen del comportamiento dinámico no lineal de un sistema sobre un período de tiempo lo suficientemente largo para poder capturar la interacción de tales componentes, como es el caso de los reguladores de tensión bajo carga de los transformadores y los limitadores del campo de corriente del generador. El período de estudio de interés puede extenderse desde unos segundos a decenas de minutos. Por lo tanto se requieren para el análisis simulaciones dinámicas de largo alcance.Un criterio para la estabilidad de tensión ante grandes perturbaciones es que, luego de una perturbación dada, las correspondientes acciones de control del sistema deben corregir las tensiones de todas las barras para que alcancen niveles aceptables en estado estacionario.
b) Estabilidad de tensión de pequeñas perturbaciones: Este fenómeno está relacionado con la capacidad del sistema para controlar tensiones luego de perturbaciones pequeñas tales como cambios incrementales en la carga del sistema. Esta forma de estabilidad está determinada por las características de la carga, controles continuos y controles discretos en un instante de tiempo dado. Este concepto es útil para determinar, en cualquier instante, cómo responderá la tensión del sistema a pequeños cambios en el sistema.El proceso básico que contribuye a la inestabilidad de tensión de pequeñas perturbaciones son esencialmente de naturaleza de estado estacionario. Por lo
tanto, el análisis en estado estacionario puede ser utilizado con efectividad para determinar los márgenes de estabilidad, identificar los factores que influyen sobre la estabilidad y examinar un amplio rango de condiciones del sistema y un gran número de escenarios posteriores a las contingencias.Un criterio para la estabilidad de tensión de pequeñas perturbaciones es que, ante una dada condición de operación, la magnitud de tensión de las barras crece en la medida que se incrementa en la misma barra la inyección de potencia reactiva. Un sistema es instable en tensión si, para al menos una barra en el sistema, la magnitud de la tensión de la barra V disminuye en la medida que la inyección de potencia reactiva Q en la misma barra aumenta.En otras palabras, un sistema es estable en tensión si la sensibilidad V-Q es positiva para cada barra e inestable si dicha sensibilidad es negativa para al menos una barra.La inestabilidad de tensión no siempre ocurre en forma pura. Con frecuencia la inestabilidad de tensión y ángulos ocurren en forma simultánea. Una de ellas puede originar la otra y las diferencias puede no ser lo suficientemente claras. Sin embargo una buena diferenciación entre la estabilidad de ángulos y de tensión es importante para el entendimiento de las causas fundamentales del problema con la finalidad de desarrollar diseños apropiados y procedimientos de operación.
4.2 PREVENCION DEL COLAPSO DE TENSIONPor colapso de tensión se entiende una disminución severa de tensión sin su correspondiente recuperación. La tensión no necesariamente debe decrecer al valor de cero, sino que resulta suficiente con que baje lo indispensable como para que sea imposible el mantenimiento de la operación de al menos una pequeña parte del sistema. Este fenómeno ha aparecido ocasionalmente y resulta algunas veces dificultoso predecirlo, pero es necesario tenerlo en cuenta por su importancia, principalmente cuando conduce al colapso del sistema.El colapso de tensión es una forma de inestabilidad de tensión, cuya causa se debe fundamentalmente a un inadecuado suministro de potencia reactiva. Los factores que se ven generalmente involucrados en este problema pueden ser uno o más de los que se mencionan seguidamente:• Alta impedancia de transferencia.• Elevado contenido de carga correspondiente a motores de inducción.• Insuficiente reserva de generación de potencia reactiva.• Condiciones severas de operación en forma temporaria.• Contingencia en generadores, transformadores o líneas de interconexión.• Estado de operación del sistema con elevada carga.• Trabajos de mantenimiento de componentes del sistema.• Errores humanos.• Problemas de mal funcionamiento en equipos de control del sistema.• Control automático defectuoso en los taps de los transformadores.La relación entre el comportamiento de la tensión con la carga del sistema tiene una influencia relevante en este fenómeno. El proceso que conduce al colapso de tensión tiene lugar dentro de un rango que va desde el orden de los segundos hasta la media hora. Este rango depende de la causa del fenómeno, de la configuración de la red y de las condiciones de operación.
El colapso de tensión se puede generalmente prevenir instalando elementos de compensación que tengan la posibilidad de suministrar en forma controlable potencia reactiva en cantidad suficiente a las correspondientes barras. Por ejemplo, en caso de tratarse de un colapso de tensión que evoluciona en forma lenta, se puede conectar capacitores shunt, sin embargo si la evolución es rápida es recomendable conectar componentes del tipo SVC. Los capacitores serie en líneas largas pueden también utilizarse como elementos para prevenir el colapso de tensión en situaciones que involucren estas líneas.
4.3 REDUCCION DE SOBRETENSION TEMPORARIALas sobretensiones temporarias ocurridas a frecuencia fundamental pueden originar desconexiones en situaciones de operación o fallas. Por regla general estas sobretensiones temporarias no exceden el valor de 1.5 p.u. y su duración no es superior al segundo. Estos fenómenos se presentan por lo general en líneas largas de alta tensión cuando existe una disminución brusca en la potencia transmitida, cambiando la componente de potencia reactiva inductiva a capacitiva. El incremento de tensión en la línea se origina por este cambio en la transmisión de potencia reactiva y por el denominado efecto Ferranti.Un método para compensar este problema es utilizar una combinación de una instalación mínima de potencia reactiva conectada en forma permanente en la línea con otra instalación de reactores shunt conectados en forma opcional a la correspondiente barra, como puede observarse en la figura 2.17. Una tercera alternativa es utilizar módulos SVC con suficiente capacidad de absorción de potencia reactiva.
Figura 2.17: Esquema ilustrativo de compensación de sobretensión temporaria