medición de la luz. radiometría y fotometría. t3 ... · ruido de captura. incertidumbre...
TRANSCRIPT
Fundamentos de Visión por Computador
Sistemas Informáticos Avanzados
T3. Adquisición de Imagen. Sensores
2T3. Adquisición. Sensores.
Índice
Medición de la luz. Radiometría y fotometría.• Modelos de reflexión de la luz.• La función de reflectancia bi-direccional, BRDF.• Reflexión especular y difusa. El modelo dicromático.
Sensores:• Modelo del sensor.• Visión humana. Estructura del ojo:• Cámaras CCD (CMOS)
Cámaras matriciales y lineales.Vídeo analógico y digital.
• Otros sensoresRepresentación de la imagen• Muestreo y cuantización• Tipos de imágenes.
3T3. Adquisición. Sensores.
Medición de la luz. Radiometría
Proyección en el plano imagen.
Iluminación.
Reflexión superficie objeto.
4T3. Adquisición. Sensores.
Radiometría

5T3. Adquisición. Sensores.
Radiometría
Ángulo sólido
θφθθω sincos2 ddr
dAdd ==Ω=
2RA=Ω
6T3. Adquisición. Sensores.
Radiometría
Energía radiante (julios)
Flujo radiante (w)
Irradiancia (w / m2 s)
Ángulo sólido (sr)
Intensidad radiante (w / sr)
Radiancia (w / m2 sr)
dtdQ /=Φ
dAdE /Φ=
ϕθθθω ddr
dAd sincos2 ==
ωddI /Φ=
ωθω ddAd
ddAdL
cos0
22 Φ=Φ=
Q
7T3. Adquisición. Sensores.
Fotometría
Respuesta espectral del ojo humano:• 360 - 800 nm• Conos: Fotópico V(λ)• Bastones: Escotópico V’(λ)
Fotópica V(λ)Escotópica V’(λ)
8T3. Adquisición. Sensores.
Radiometría / Fotometría
LuminanciaRadiancia
Intensidad luminosaIntensidad radiante
IluminanciaIrradiancia
Flujo luminosoFlujo radiante
Energía luminosaEnergía radiante
Magnitud fotométricaMagnitud radiométrica
Medidas fotométricas: • medidas fisiológicas relativas a la eficiencia espectral
del ojo humano.
∫
∫=
=nm
nmV
nm
nmV
dVQwlmQ
dVQwlmQ
780
380'
780
380
)(')(683
)()(683
λλλ
λλλ
9T3. Adquisición. Sensores.
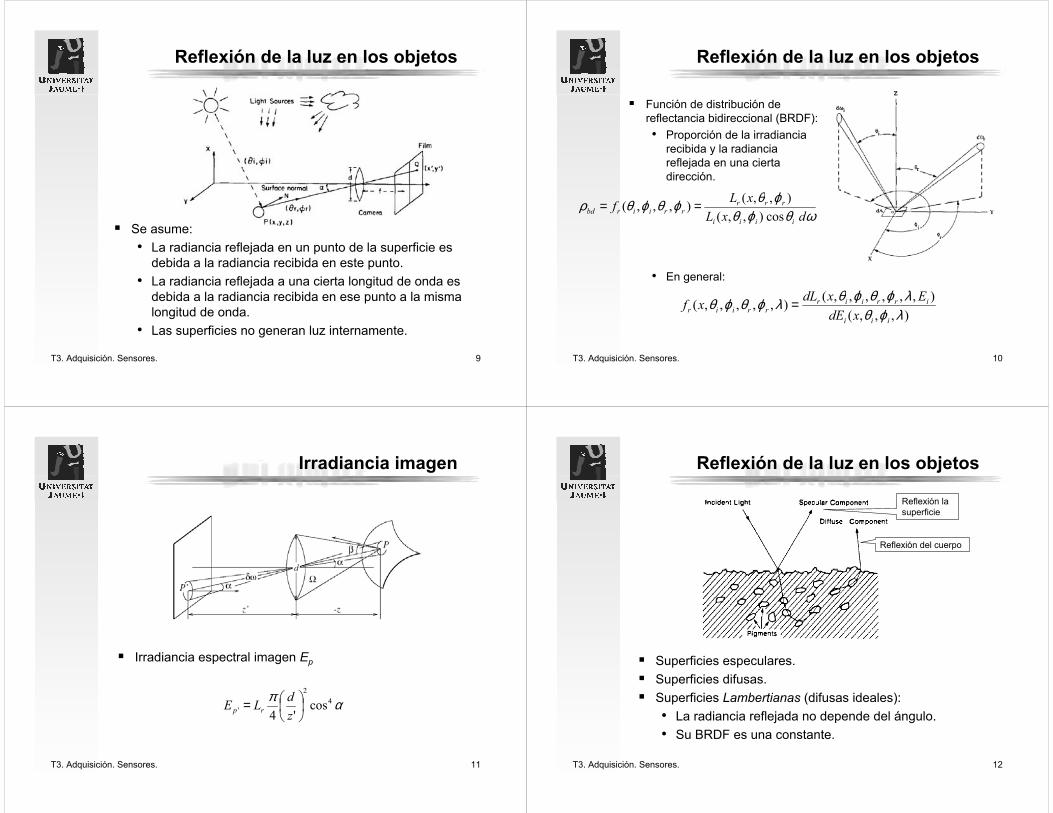
Reflexión de la luz en los objetos
Se asume:• La radiancia reflejada en un punto de la superficie es
debida a la radiancia recibida en este punto.• La radiancia reflejada a una cierta longitud de onda es
debida a la radiancia recibida en ese punto a la misma longitud de onda.
• Las superficies no generan luz internamente.
10T3. Adquisición. Sensores.
Reflexión de la luz en los objetos
ωθϕθϕθϕθϕθρ
dxLxLf
iiii
rrrrriirbd cos),,(
),,(),,,( ==
),,,(),,,,,,(),,,,,(
λϕθλϕθϕθλϕθϕθ
iii
irriirrriir xdE
ExdLxf =
Función de distribución de reflectancia bidireccional (BRDF):• Proporción de la irradiancia
recibida y la radianciareflejada en una cierta dirección.
• En general:
11T3. Adquisición. Sensores.
Irradiancia imagen
Irradiancia espectral imagen Ep
απ 42
' cos'4
=zdLE rp
12T3. Adquisición. Sensores.
Reflexión de la luz en los objetos
Superficies especulares.Superficies difusas.Superficies Lambertianas (difusas ideales):• La radiancia reflejada no depende del ángulo.• Su BRDF es una constante.
Reflexión del cuerpo
Reflexión la superficie

13T3. Adquisición. Sensores.
Modelo de reflexión dicromático
Radiancia reflejada en un punto de la superficie de un objeto (Shafer, 1985):
Si se asume dieléctrico no homogéneo:• Mismas propiedades de reflexión a lo largo de toda la
superficie del objeto:
• BRDF
),,,,(),,,,(),,,,( λϕθϕθλϕθϕθλϕθϕθ rriibrriisrrii LLL +=
)(),,,()(),,,(),,,,( λϕθϕθλϕθϕθλϕθϕθ brriibsrriisrrii cmcmL +=
)(),,,()(),,,(),,,,( λϕθϕθλϕθϕθλϕθϕθ brriisrriirriir chcgf +=
g,h magnitudes entre 0 y 1
14T3. Adquisición. Sensores.
Modelo NIR
Modelo de reflexión del interfaz neutral (NIR):• Reflexión superficial no depende de λ.
• BRDF
• La luz reflejada en la superficie tiene la misma distribución espectral que la incidente.
)(),,,(),,,(),,,,( λϕθϕθϕθϕθλϕθϕθ brriibrriisrrii cmsmL +=
)(),,,(),,,(),,,,( λϕθϕθϕθϕθλϕθϕθ brriirriirriir chsgf +=
g,h magnitudes entre 0 y 1
Interfaz neutral
15T3. Adquisición. Sensores.
Sistemas de coordenadas
Mundo W(x,y,z)Objeto B(xb,yb,zb)
Cámara C(xc,yc,zc)
Imagen real I(x’,y’)
Imagen pixel I(i,j)
16T3. Adquisición. Sensores.
Integración en el sensor
Integración en el sensor
απ 42
' cos'4
=zdLE rp
∫ ∫=t
dtdRtyxEyxQλ
λλλ )(),,','()','(
Respuesta espectral del sensor

17T3. Adquisición. Sensores.
Cámara CCD
dtddydxqyxStyxEjiIt x y
q λλλλ∫ ∫ ∫ ∫=
' '
'')()','(),,','(),(
Cámara CCD
Eficiencia quántica: número de electrones por unidad de energía.
Respuesta espacial del sensor en un punto.
dA=dx’dy’, área de un píxel
Carga eléctrica (número de electrones) recogidos en un píxel.
18T3. Adquisición. Sensores.
Modelo del sensor
qast NNNNjiIKAjiD ++++= )),((),(
CCD (Charge Coupled Device)
Ganancia del amplificador/cámara.
Defectos en la eficiencia quántica y respuesta espacial.
Ruido de captura.Incertidumbre quántica del número de electrones almacenados.
Corriente obscura. Electrones generados por energía térmica.
Ruido de del amplificador.
Ruido por efectos geométricos (jitter) en la discretizacióny de la cuantización.
K se puede modelar como una variable aleatoria de media 1 y desviación típica σK
Nq se puede modelar como una variable aleatoria de distribución uniforme en el intervalo [-q/2,q/2] y varianza q2/12
19T3. Adquisición. Sensores.
Visión humana. Estructura del ojo
Funciona como una cámara de campo visual 160ºx135º.Sufre de varios aberraciones geométricas y cromáticas.Rango de acomodación [60,68] dioptrías (1/m):• focal entre [15,17] mm.
Esquema del modelo del ojo no acomodado de Helmoltz
Componentes principales del ojo
20T3. Adquisición. Sensores.
Visión humana. Estructura del ojo
Fotorreceptores [330,730] nm:• 100 millones bastones y 5 millones conos, approx.• Fóvea: área mayor concentración conos.• Macula lútea: área de gran concentración de conos.
Bastones muy sensibles: incluso a un fotón.Campo receptor: área de la retina conectada a una neurona.
Conos en la fóvea Conos (aumentan de tamaño con la excentricidad) y bastones en la periferia.
Distribución conos y bastones en la retina

21T3. Adquisición. Sensores.
Cámaras CCD
CCD (Charge Coupled Device)Patrón de Bayer (CCD color)
Tri-CCD (CCD color)22T3. Adquisición. Sensores.
Cámaras CCD
Escaneado no progresivo
Escaneado progresivo
Vídeo entrelazado
Vídeo no entrelazado
23T3. Adquisición. Sensores.
Cámaras matriciales y lineales
Cámara lineal
Cámara matricial
24T3. Adquisición. Sensores.
Señales de vídeo
Video analógico:• Cámara convierte D/A y
amplifica.• Vídeo entrelazado y no
entrelazado.• PAL / CCIR:
Entrelazado.25 frames/seg.
• NTSC / RS-170A: Entrelazado30 frames/seg.
Video digital:• Bus digital entre cámara y ordenador.• Camera Link.• IEEE-1394 (firewire, i-link):
Estándar D-CAM
25T3. Adquisición. Sensores.
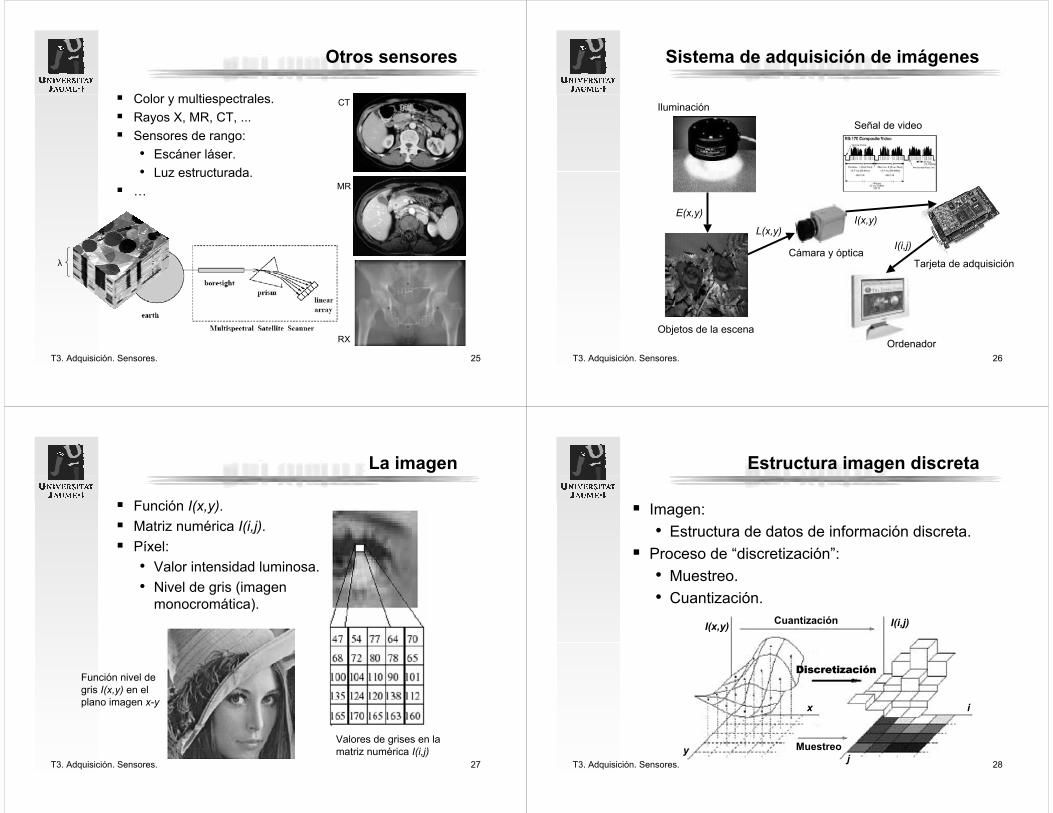
Otros sensores
Color y multiespectrales.Rayos X, MR, CT, ...Sensores de rango:• Escáner láser.• Luz estructurada.
…
CT
MR
RX
λ
26T3. Adquisición. Sensores.
Sistema de adquisición de imágenes
Iluminación
Objetos de la escena
Cámara y ópticaTarjeta de adquisición
Ordenador
Señal de video
E(x,y)
L(x,y)I(x,y)
I(i,j)
27T3. Adquisición. Sensores.
La imagen
Función I(x,y).Matriz numérica I(i,j).Píxel: • Valor intensidad luminosa.• Nivel de gris (imagen
monocromática).
Función nivel de gris I(x,y) en el plano imagen x-y
Valores de grises en la matriz numérica I(i,j)
28T3. Adquisición. Sensores.
Estructura imagen discreta
Imagen:• Estructura de datos de información discreta.
Proceso de “discretización”: • Muestreo.• Cuantización.
Cuantización
Discretización
Muestreo
I(x,y) I(i,j)
y
x
j
i

29T3. Adquisición. Sensores.
Cuantificación y muestreo
Muestreo
Cua
ntiz
ació
n
30T3. Adquisición. Sensores.
Tipos de imágenes
Imágenes monocromáticas.Imágenes binarias.Imágenes en color (multibanda).Imágenes de rango.
ColorMultiespectral
Monocroma Binaria
Rango
31T3. Adquisición. Sensores.
Formatos de ficheros imagen
Formatos de archivos imagen:• JPEG, GIF, PNG, PPM, BMP, TIFF, etc.
Métodos de compresión:• Compresión lossy (con pérdida de información)• Compresión lossless (sin pérdida de información)
Ejemplo: una imagen 225x300:• PPM: 68Kb• GIF: 40Kb• JPEG: 41-6Kb
32T3. Adquisición. Sensores.
Bibliografía
Básico:• Forsyth, D.A. and Ponce, J.; Computer Vision: A
Modern Approach, Prentice Hall, 2003.
Complementarios:• Jähne, B. Practical Handbook on Image
Processing for Scientific Applications, CRC Press, 1997.
• Jain, R.; Kasturi, R.; and Schunck, B.G.; MachineVision, McGraw-Hill Inc., 1995.
• Shapiro, L. and Stockman, G.; Computer Vision, Prentice Hall, 2000.