matriz (matemática) - weblog de la especialidad de ... · web viewpor ejemplo: el producto de dos...
TRANSCRIPT

MatrizDefiniciones y notacionesUna matriz es una tabla o arreglo rectangular de numeros. Los numeros en el arreglo se denominan elementos de la matriz.
Las líneas horizontales en una matriz se denominan filas y las líneas verticales se denominan columnas. A una matriz con m filas y n columnas se le denomina matriz m-por-n (escrito m×n), y m y n son sus dimensiones. Las dimensiones de una matriz siempre se dan con el número de filas primero y el número de columnas después.
La entrada de una matriz A que se encuentra en la fila i-ésima y la columna j-ésima se le llama entrada i,j o entrada (i,j)-iésima de A. Esto se escribe como Ai,j o A[i,j].
Normalmente se escribe para definir una matriz A m × n con cada entrada en la matriz A[i,j] llamada aij para todo 1 ≤ i ≤ m y 1 ≤ j ≤ n. Sin embargo, la convención del inicio de los índices i y j en 1 no es universal: algunos lenguajes de programación comienzan en cero, en cuál caso se tiene 0 ≤ i ≤ m − 1 y 0 ≤ j ≤ n − 1.
Una matriz con una sola columna o una sola fila se denomina a menudo vector, y se interpreta como un elemento del espacio euclídeo. Una matriz 1 × n (una fila y n columnas) se denomina vector fila, y una matriz m × 1 (una columna y m filas) se denomina vector columna.
EjemploLa matriz
es una matriz 4×3. El elemento A[2,3] o a2,3 es 7.
La matriz
es una matriz 1×9, o un vector fila con 9 elementos.
Suma de matricesDadas las matrices m-por-n A y B, su suma A + B es la matriz m-por-n calculada sumando los elementos correspondientes (i.e. (A + B)[i, j] = A[i, j] + B[i, j] ). Es decir, sumar cada uno de los elemetos homologos de las matrices a sumar. Por ejemplo:

Propiedades de la suma de matrices
Asociativa
Dadas las matrices m-por-n A , B y C
A + (B + C) = (A + B) + C Conmutativa
Dadas las matrices m-por-n A y B
A + B = B + A Existencia de matriz cero o matriz nula
A + 0 = 0 + A = A Existencia de matriz opuesta
con -A = [-aij]
A + (-A) = 0
Producto de una matriz por un escalarDada una matriz A y un número c, el producto escalar cA se calcula multiplicando el escalar c por cada elemento de A (i.e. (cA)[i, j] = cA[i, j] ). Por ejemplo:
Producto de matricesEl producto de dos matrices se puede definir sólo si el número de columnas de la matriz izquierda es el mismo que el número de filas de la matriz derecha. Si A es una matriz m-por-n y B es una matriz n-por-p, entonces su producto matricial AB es la matriz m-por-p (m filas, p columnas) dada por:
para cada par i y j.
Por ejemplo:

El producto de dos matrices no es conmutativo, es decir, AB ≠ BA. La división entre matrices, es decir, la operación que podría producir el cociente A / B, no se encuentra definida. Sin embargo, existe el concepto de matriz inversa, sólo aplicable a las matrices cuadradas.
Las matrices en la ComputaciónLas matrices son utilizadas ampliamente en la computación, por su facilidad y liviandad para manipular información. En este contexto, son la mejor forma para representar grafos, y son muy utilizadas en el cálculo numérico.
Determinante (matemática)En matemáticas se define el determinante como una forma n-lineal alterna de un cuerpo En. Esta definición indica una serie de propiedades matemáticas y generaliza el concepto de determinante haciéndolo aplicable en numerosos campos. Aunque el origen del determinante tiene lugar en el campo del álgebra lineal y puede concebirse como una generalización del concepto de superficie o de volumen orientado. Fue introducido para estudiar el número de soluciones de los sistemas lineales de ecuaciones
Dos ejemplosEl caso n = 1 carece totalmente de interés, veamos los casos n = 2 y luego n = 3.
Una observación preliminar: una aplicación alterna es también antisimétrica.En efecto, con n = 2 por ejemplo:
f( v + w, v + w) = o por ser f alterna, luego si se desarrolla el miembro izquierdo, se obtiene: f( v + w, v + w) = f(u, u) + f(u, v) + f(v, u) + f(v, v) = 0 + f(u, v) + f(v, u) + 0.
Igualando los dos resultados se concluye que f(v, u) = - f(u, v), lo que es la antisimetría.
En la base (e1, e2) de E, sea u = a·e1 + b·e2 y v = c·e1 + d·e2 dos vectores cualesquiera. De aquí en adelante, se notará det el determinante.
det(u, v) = det(a·e1 + b·e2, c·e1 + d·e2) = c·det(a·e1 + b·e2, e1) + d·det(a·e1 + b·e2, e2)linealidad a la derecha es decir con relación al segundo argumento = c·a·det(e1, e1) + c·b·det(e2, e1) + d·a·det(e1, e2) + d·b·det(e2, e2)linealidad a la izquierda= c·a·0 + c·b·(-1) + d·a·1 + d·b·0 = ad - bc la forma alterna anula det(e1, e1) y det(e2, e2), y la antisimetría hace que det(e2, e1) = - det(e1, e2) = -1por definición, det(e1, e2) = 1
Si se disponen los vectores en columna, se constituye una matriz cuyo determinante se calcula por la regla de los productos cruzados:

Se procede de la misma manera en el caso n = 3; sin embargo, para eludir cálculos más largos, es preferible reflexionar antes de echarse a llenar hojas.Se toma tres vectores, u, v y w, y se les descomponen en la base (e1, e2, e3).Al desarrollar el determinante, se tendrá que descartar todos los casos en que aparezcan varias veces el mismo vector. Quedarán pues sólo términos donde aparecen una vez los tres vectores de las base, mas en un orden cualquiera. Se dice que hay una permutación de e1, e2 y e3.Por ejemplo: det(e3,e1,e2) = - det(e1,e3,e2) = det(e1,e2,e3) = 1, aplicando la antisimetría dos veces.Al pasar del primer miembro al último, se ha multiplicado dos veces por -1, o sea una vez por (-1)².Este último factor es la signatura (o firma) de la permutación que envía (e1, e2,e3) en (e3, e1, e2).El conjunto de las permutaciones (de tres elementos) se llama el grupo simétrico (de orden 3), S3. S3 tiene tres permutaciones pares, es decir de signatura 1, y tres impares, de signatura -1. Se nota ε(σ) o sgn(σ) la signatura de la permutación σ (sgn como signature,firma en francés, o signo).Con todos estos datos, se puede hallar el determinante de orden 3: El método de Sarrus consiste en escribir los tres vectores en columna y repetir las dos primeras líneas por debajo de la matriz; las permutaciones pares corresponden a las diagonales descendientes mientras que las impares corresponden a las ascendientes. Sobre cada diagonal se multiplican los números, y se suman o restan los productos.
Fórmula general El raciocinio detallado del caso n = 3 permite la generalización. Sea un valor cualquiera de n, y los vectores:v1 = a 1,1e1 + a 2,1e2 +... + a n,1en,v2 = a 1,2e1 + a 2,2e2 +... + a n,2en,
y así sucesivamente hasta :
vn = a 1,ne1 + a 2,ne2 +... + a n, nen.Y sea A la matriz cuyas columnas son los vectores v1,... vn. A = (ai, j)1≤i, j≤n.
Esta definición de determinante fue propuesta por Leibnitz. Excepto en casos sencillos, esta fórmula no resulta muy práctica a causa del número excesivo de permutaciones. Afortunadamente, existe una manera de desarrollar el determinante según una línea (una columna o una fila):
donde ci,j representa el determinante del adjunto de ai,j
Es la fórmula de Laplace.
Métodos de cálculo

Determinantes de orden 1
Una matriz de orden 1 no es más que un número. Por ejemplo, la matriz (4) es una matriz de orden 1, pues tiene 1 fila y 1 columna. Así, las matrices de orden uno son de la forma (a1,1). El determinante de dicha matriz es det(a1,1) = a1,1. Así, por ejemplo, det(4)=4.
Observación: En el caso de matrices de orden uno no se suele escribir el determinante entre barras, para no confundirlo con el valor absoluto del número.
Determinantes de orden 2
El área del paralelogramo es la determinante de la matriz formada por los vectores que representan los lados del paralelogramo.
Como se ha dicho antes, un determinante de orden dos se calcula de la siguiente manera:
Determinantes de orden 3 [editar]
Un determinante de orden 3 se calcula mediante la regla de Sarrus:
Determinantes de orden superior a 3
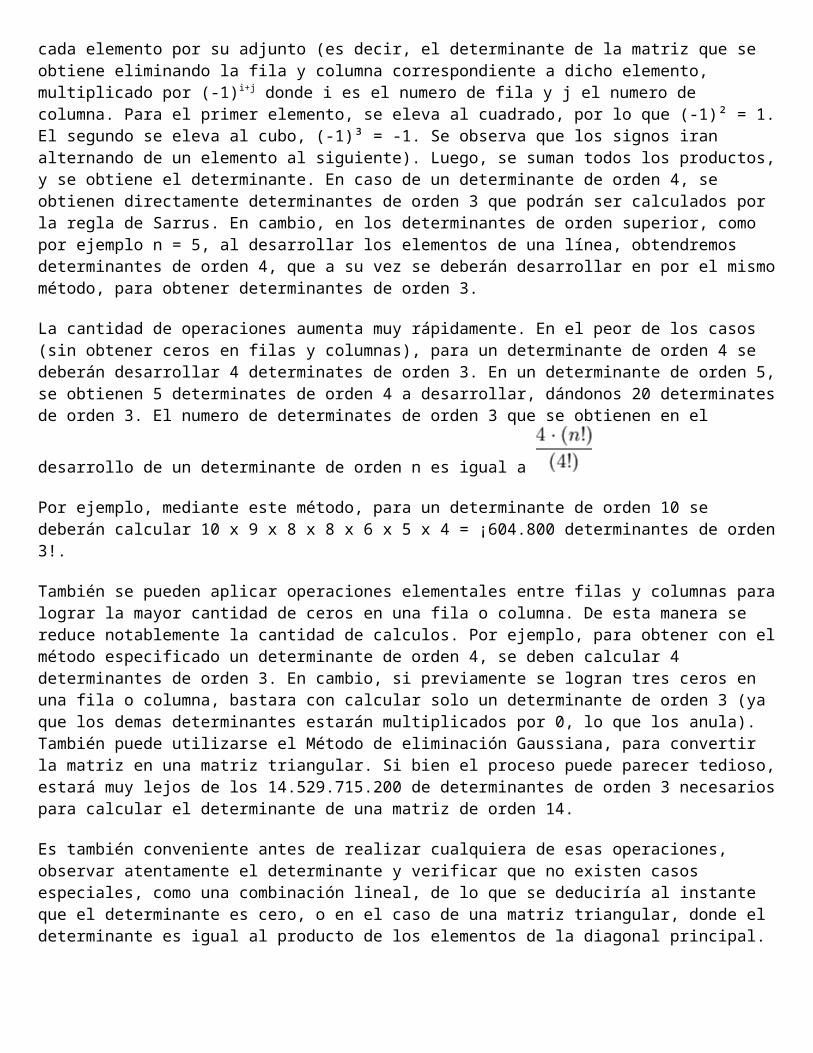
Suele desarrollarse el determinante de orden n a partir de una fila o columna, eliminando así filas y columnas hasta obtener un determinante de orden n-1. Para ello se toma una fila o columna cualquiera, multiplicando cada elemento por su adjunto (es decir, el determinante de la matriz que se obtiene eliminando la fila y columna correspondiente a dicho elemento, multiplicado por (-1)i+j donde i es el numero de fila y j el numero de columna. Para el primer elemento, se eleva al cuadrado, por lo que (-1)² = 1. El segundo se eleva al cubo, (-1)³ = -1. Se observa que los signos iran alternando de un elemento al siguiente). Luego, se suman todos los productos, y se obtiene el determinante. En caso de un determinante de orden 4, se obtienen directamente determinantes de orden 3 que podrán ser calculados por la regla de Sarrus. En cambio, en los determinantes de orden superior, como por

ejemplo n = 5, al desarrollar los elementos de una línea, obtendremos determinantes de orden 4, que a su vez se deberán desarrollar en por el mismo método, para obtener determinantes de orden 3.
La cantidad de operaciones aumenta muy rápidamente. En el peor de los casos (sin obtener ceros en filas y columnas), para un determinante de orden 4 se deberán desarrollar 4 determinates de orden 3. En un determinante de orden 5, se obtienen 5 determinates de orden 4 a desarrollar, dándonos 20 determinates de orden 3. El numero
de determinates de orden 3 que se obtienen en el desarrollo de un determinante de orden n es igual a
Por ejemplo, mediante este método, para un determinante de orden 10 se deberán calcular 10 x 9 x 8 x 8 x 6 x 5 x 4 = ¡604.800 determinantes de orden 3!.
También se pueden aplicar operaciones elementales entre filas y columnas para lograr la mayor cantidad de ceros en una fila o columna. De esta manera se reduce notablemente la cantidad de calculos. Por ejemplo, para obtener con el método especificado un determinante de orden 4, se deben calcular 4 determinantes de orden 3. En cambio, si previamente se logran tres ceros en una fila o columna, bastara con calcular solo un determinante de orden 3 (ya que los demas determinantes estarán multiplicados por 0, lo que los anula). También puede utilizarse el Método de eliminación Gaussiana, para convertir la matriz en una matriz triangular. Si bien el proceso puede parecer tedioso, estará muy lejos de los 14.529.715.200 de determinantes de orden 3 necesarios para calcular el determinante de una matriz de orden 14.
Es también conveniente antes de realizar cualquiera de esas operaciones, observar atentamente el determinante y verificar que no existen casos especiales, como una combinación lineal, de lo que se deduciría al instante que el determinante es cero, o en el caso de una matriz triangular, donde el determinante es igual al producto de los elementos de la diagonal principal.
En general, sin embargo, los cálculos de determinantes de ordenes altos pueden realizarse mediante la programación de estos algoritmos en ordenadores que realizan esos cálculos muy rápidamente.
Propiedades La propiedad algebraica fundamental del determinante es la siguiente:
det(AB) = det(A)·det(B)
en términos de aplicaciones lineales, se escribe así:
det(uºv) = det(u)·det(v)
det(At) = det(A)
Matrices elementales
Las matrices elementales son aquellas que se obtienen a partir de una operación elemental de matrices sobre la matriz identidad.Estas son:
1. Escalamiento: multiplicar una fila por un número. 2. Eliminación: sumar a una fila una combinación lineal de las restantes. 3. Permutación: intercambiar dos filas.
Las matrices tienen esta forma (en el caso 3X3):
Obtenidas por escalamiento
Obtenidas por eliminación
Análogamente, el número a puede estar encima de la diagonal.
Obtenidas por permutación
Véase: matriz permutación
Propiedades Si multiplicamos alguna de estas matrices por una matriz A, será como aplicar las operaciones elementales de matrices. Es fácil ver que estas matrices tienen inversas, ya que pensando en ellas como matrices A se debe aplicar la operación "inversa". Por ejemplo, teniendo:
Queremos que el elemento a33 sea 1. Entonces:
Matriz traspuesta

Sea A una matriz con m filas y n columnas. La matriz transpuesta, denotada con At está dada por
Ejemplos
Propiedades Para toda matriz A
Sean A y B matrices con elementos pertenecen a un anillo y sea
Si el producto de las matrices A y B está definido,
Si A es una matriz cuadrada cuyas entradas son números reales, entonces
es semidefinida positiva
Definiciones asociadas Una matriz cuadrada A es simétrica si coinciede con su transpuesta, esto es si
Es antisimétrica si coincide con su negativa
Si los elementos de la matriz A son números complejos y su transpuesta coincide con su conjugada, se dice que la matriz es hermítica
y antihermítica si
Vale la pena observar que si una matriz es hermítica (la matrices simétricas son un caso particular) entonces es diagonalizable y sus autovaleres son reales. (El recíproco es falso).

Matriz cuadradaUna matriz de nxm elementos:
es una matriz cuadrada si el número de filas es igual al número columnas. Es decir, n = m.
Se dice, entonces que la matriz es de orden n.
Toda matriz cuadrada se puede descomponer en la suma de una matriz simétrica y una matriz antisimétrica.
Si A y B son matrices del mismo orden, entonces se pueden sumar entre sí. Los productos de matrices son válidos en ambos sentidos, AB y BA. Además, surgen los conceptos de determinante y traza solo aplicables a matrices cuadradas.
Una matriz cuadrada A de orden n es singular si su determinante es nulo. En tal caso se dice que dicha matriz no tiene inversa.
Ejemplo de matriz cuadrada para n = 3:
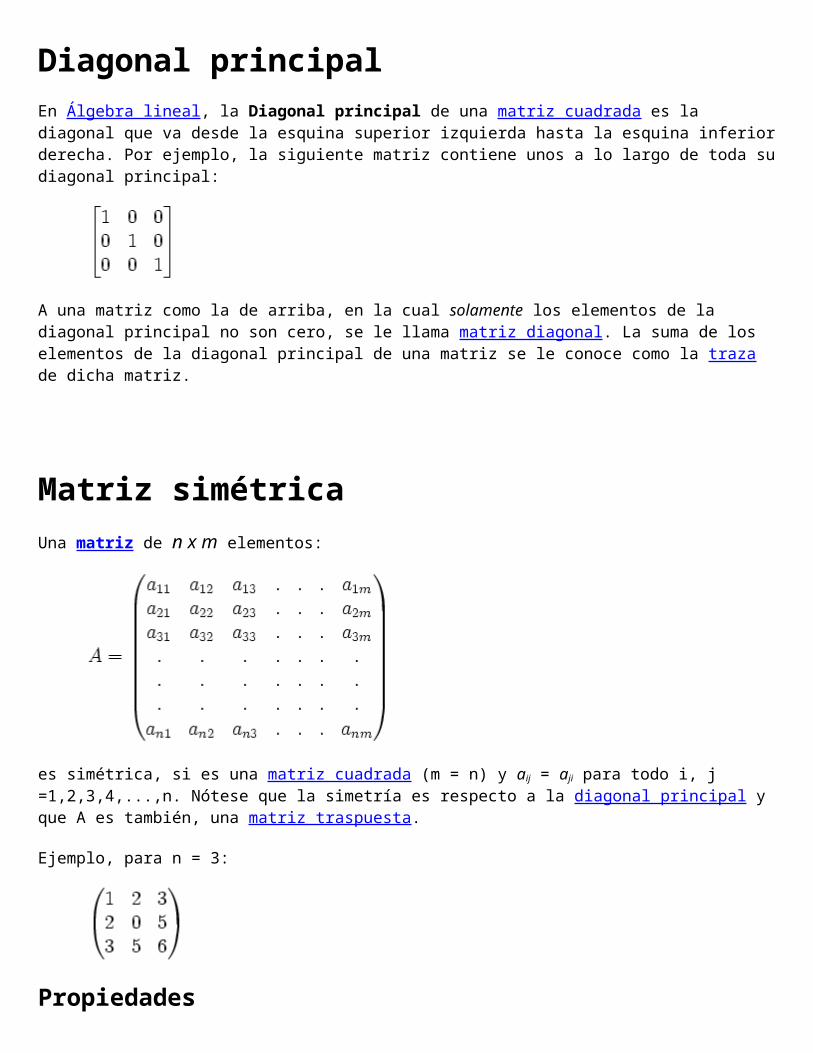
Diagonal principal

En Álgebra lineal, la Diagonal principal de una matriz cuadrada es la diagonal que va desde la esquina superior izquierda hasta la esquina inferior derecha. Por ejemplo, la siguiente matriz contiene unos a lo largo de toda su diagonal principal:
A una matriz como la de arriba, en la cual solamente los elementos de la diagonal principal no son cero, se le llama matriz diagonal. La suma de los elementos de la diagonal principal de una matriz se le conoce como la traza de dicha matriz.
Matriz simétricaUna matriz de n x m elementos:
es simétrica, si es una matriz cuadrada (m = n) y aij = aji para todo i, j =1,2,3,4,...,n. Nótese que la simetría es respecto a la diagonal principal y que A es también, una matriz traspuesta.
Ejemplo, para n = 3:
PropiedadesUno de los teoremas básicos que concierne este tipo de matrices es el teorema espectral de dimensión finita, que dice que toda matriz simétrica cuyas entradas sean reales puede ser diagonalizada por una matriz ortogonal. Éste es un caso especial de una matriz hermítica.
Autovalores

Como las matrices simétricas son un caso particular de las matrices hermíticas, todos sus autovalores son reales.
Con base en las propiedades de los autovalores de una matriz simétrica, se pueden clasificar en los siguientes tipos:
definida positiva: Una matriz simétrica es definida positiva si y solo si todos sus autovalores son estrictamente positivos.
definida negativa: Una matriz simétrica es definida negativa si y solo si todos sus autovalores son estrictamente negativos.
semidefinida positiva: Una matriz simétrica es semidefinida positiva si y solo si todos sus autovalores son mayores o iguales a cero.
semidefinida negativa: Una matriz simétrica es semidefinida negativa si y solo si todos sus autovalores son menores o iguales a cero.
Matriz antisimétricaUna matriz de nxm elementos:
es antisimétrica, si es una matriz cuadrada (m = n) y aji = − aij para todo i,j =1,2,3,...,n. En consecuencia, aii = 0 para todo i. Por lo tanto, la matriz A asume la forma:
Nótese que la matriz traspuesta de la matriz antisimetrica A es -A, y que la antisimetría es respecto a la diagonal principal.
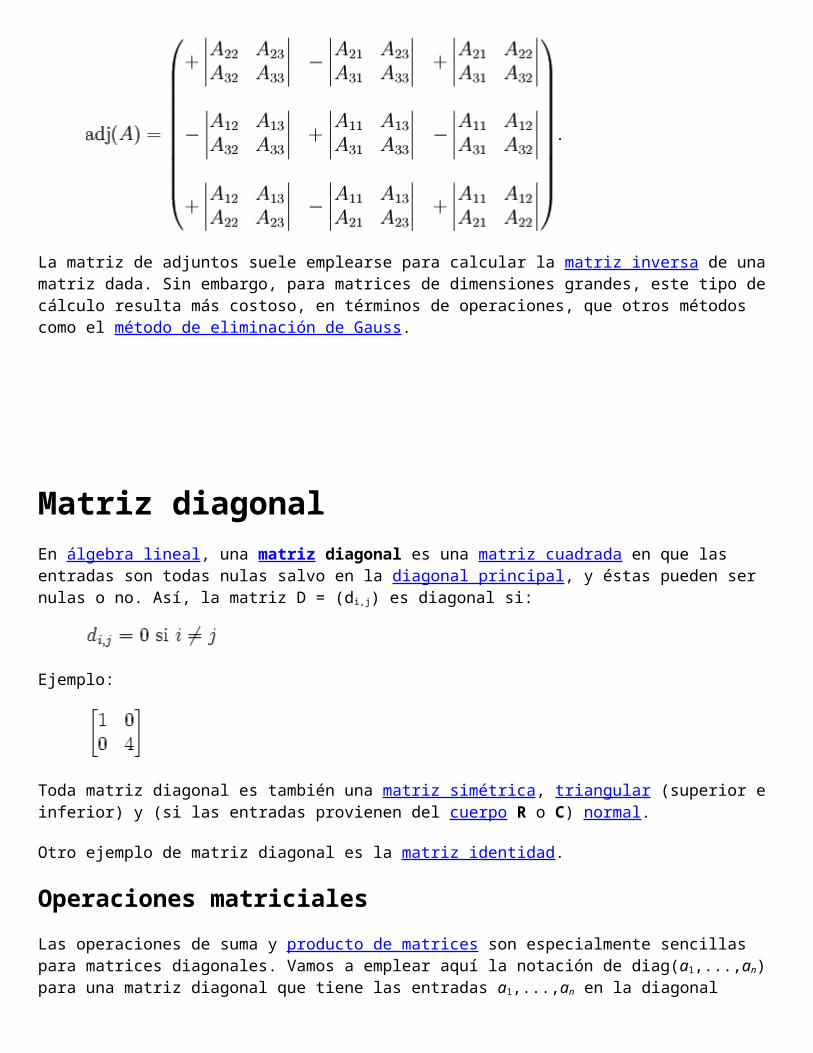
Matriz de adjuntos
Dada una matriz cuadrada A, su matriz adjunta o adj(A) es la resultante de sustituir cada término de A por sus adjuntos respectivos.
El adjunto de un término ai j de la matriz A resulta del determinante de la matriz que se obtiene de eliminar de la matriz A, la fila y la columna a la que pertenece el término ai j, multiplicado por (-1)(i+j)
EjemplosUn ejemplo sería el siguiente:
En general: dada la matriz
su adjunto es
La matriz de adjuntos suele emplearse para calcular la matriz inversa de una matriz dada. Sin embargo, para matrices de dimensiones grandes, este tipo de cálculo resulta más costoso, en términos de operaciones, que otros métodos como el método de eliminación de Gauss.
Matriz diagonal

En álgebra lineal, una matriz diagonal es una matriz cuadrada en que las entradas son todas nulas salvo en la diagonal principal, y éstas pueden ser nulas o no. Así, la matriz D = (di,j) es diagonal si:
Ejemplo:
Toda matriz diagonal es también una matriz simétrica, triangular (superior e inferior) y (si las entradas provienen del cuerpo R o C) normal.
Otro ejemplo de matriz diagonal es la matriz identidad.
Operaciones matricialesLas operaciones de suma y producto de matrices son especialmente sencillas para matrices diagonales. Vamos a emplear aquí la notación de diag(a1,...,an) para una matriz diagonal que tiene las entradas a1,...,an en la diagonal principal, empezando en la esquina superior izquierda. Entonces, para la suma se tiene:
diag(a1,...,an) + diag(b1,...,bn) = diag(a1+b1,...,an+bn)
y para el producto de matrices,
diag(a1,...,an) · diag(b1,...,bn) = diag(a1b1,...,anbn).
La matriz diagonal diag(a1,...,an) es invertible si y sólo si las entradas a1,...,an son todas distintas de 0. En este caso, se tiene
diag(a1,...,an)-1 = diag(a1-1,...,an
-1).
En particular, las matrices diagonales forman un subanillo del anillo de las matrices de n×n.
Multiplicar la matriz A por la izquierda con diag(a1,...,an) equivale a multiplicar la fila i-ésima de A por ai para todo i. Multiplicar la matriz A por la derecha con diag(a1,...,an) equivale a multiplicar la columna i-ésima de A por ai para todo i.
Autovalores, autovectores y determinante Los autovalores de diag(a1,...,an) son a1,...,an. Los vectores e1,...,en forman una base de autovectores. El determinante de diag(a1,...,an) es igual al producto a1...an.
Usos

Las matrices diagonales tienen lugar en muchas áreas del álgebra lineal. Debido a la sencillez de las operaciones con matrices diagonales y el cálculo de su determinante y de sus valores y vectores propios, siempre es deseable representar una matriz dada o transformación lineal como una matriz diagonal.
De hecho, una matriz dada de n×n es similar a una matriz diagonal si y sólo si tiene n autovectores linealmente independientes. Tales matrices se dicen diagonalizables.
En el cuerpo de los números reales o complejos existen más propiedades: toda matriz normal es similar a una matriz diagonal (véase teorema espectral) y toda matriz es equivalente a una matriz diagonal con entradas no negativas.
Matriz de diagonal estrictamente dominanteEn matemáticas, y especialmente en álgebra lineal, una matriz es estrictamente dominante, cuando lo es por filas o por columnas.
Lo es por filas cuando, para todas las filas, el valor absoluto del elemento de la diagonal de esa fila es estrictamente mayor que la suma de los valores absolutos del resto de elementos de esa fila.
Lo es por columnas cuando, para todas las columnas, el valor absoluto del elemento de la diagonal de esa columna es estrictamente mayor que la suma de los valores absolutos del resto de elementos de esa columna.
Estas matrices también se denominan "matrices de Hadamard". Una matriz de Hadamard siempre es regular, es decir, su determinante es no nulo. Las submatrices fundamentales de una matriz de Hadamard también son de Hadamard y siempre admiten factorización LU.
Formalmente, se dice que la matriz A de n x n es estrictamente diagonal dominante cuando se satisface:
Matriz hermitianaUna matriz hermitiana (o hermítica) es una matriz cuadrada de elementos complejos que tiene la característica de ser igual a su propia traspuesta conjugada. Es decir, el elemento en la i-ésima fila y j-ésima columna es igual al conjugado del elemento en la j-ésima fila e i-ésima columna, para todos los índices i y j:
o, escrita con la traspuesta conjugada A*:
Por ejemplo,
es una matriz hermítica.
Propiedades 1. Sea A = B + iC, donde A es hermitiana y B y C reales, entonces B es simétrica (B = Bt) y C antisimétrica (C
= − Ct). 2. La inversa de una matriz hermitiana es también hermitiana. 3. En una matriz hermitiana, los elementos de la diagonal principal son reales. 4. La determinante de una matriz hermitiana es un número real.
Pero la propiedad más importante de toda matriz hermitiana es que todos sus autovalores son reales.
Matriz idempotenteUna matriz idempotente es una matriz la cual es igual a su cuadrado, es decir:
A es idempotente si A x A = A
Por ejemplo, la siguiente matriz es idempotente:
O sea: la matriz elevada al cuadrado va a ser la misma matriz sin elevarla.
Matriz identidadEn álgebra lineal, la matriz identidad es una matriz que cumple la propiedad de ser el elemento neutro del producto de matrices. Esto quiere decir que el producto de cualquier matriz por la matriz identidad (donde dicho producto esté definido) no tiene ningún efecto. La columna i-ésima de una matriz identidad es el vector unitario ei de una base vectorial inmersa en un espacio Euclídeo de dimensión n.
Como el producto de matrices sólo tiene sentido si sus dimensiones son compatibles, existen infinitas matrices identidad dependiendo de las dimensiones. In, la matriz identidad de tamaño n, se define como la matriz diagonal que tiene 1 en cada una de las entradas de la diagonal principal, y 0 en el resto. Así,

Empleando la notación que a veces se usa para describir concisamente las matrices diagonales, resulta:
In = diag(1,1,...,1)
Si el tamaño es inmaterial, o se puede deducir de forma trivial por el contexto, entonces se escribe simplemente como I.
También se puede escribir usando la notación delta de Kronecker:
Iij = δij
o, de forma aún más sencilla,
I = (δij)
La matriz identidad de orden n puede ser también considerada como la matriz permutación que es elemento neutro del grupo de matrices de permutación de orden n!.
Matriz permutaciónLa matriz permutación es la matriz cuadrada con todos sus n×n elementos iguales a 0, excepto uno cualquiera por cada fila y columna, el cual debe ser igual a 1. De acuerdo a esta definición existen n! matrices de permutación distintas, de las cuales una mitad corresponde a matrices de permutación par (con el determinante igual a 1) y la otra mitad a matrices de permutación impar (con el determinante igual a -1).
Para n = 3 se tiene:
Matrices de permutación par:
Matrices de permutación impar:

Puede notarse que las matrices de permutación conforman un grupo de orden n! respecto al producto.
Propiedades El elemento neutro del grupo es la matriz identidad. El elemento inverso de cada elemento del grupo de matrices de permutación es la matriz traspuesta
correspondiente. Cada elemento del grupo de matrices de permutación es una matriz ortogonal. El producto de matrices de permutación par siempre genera una matriz de permutación par. El producto de matrices de permutación impar siempre genera una matriz de permutación par. El producto de matrices de permutación de paridad distinta siempre genera una matriz de permutación
impar. Observe que las matrices de permutación par conforman un semigrupo y que además el grupo de matrices
de permutación no es conmutativo. Cada elemento del grupo de matrices de permutación fuera del semigrupo es una matriz simétrica.
Matriz ortogonalLas matrices ortogonales, representan transformaciones en espacios vectoriales reales[1] llamadas justamente, transformaciones ortogonales. Estas transformaciones son isomorfimos internos del espacio vectorial en cuestión. Suelen representar rotaciones y son usadas extensivamente en computación gráfica. Por sus propiedades también son usadas para el estudio de ciertos fibrados y en física se las usa en la formulación de ciertas teorías de campos.
DefiniciónSea n un número entero y sea A una matriz cuadrada n por n, con entradas reales. Se dice que la matriz es ortogonal si:
donde representa la matriz transpuesta de e representa la matriz identidad.
Ejemplos
Supongamos que la matriz de números reales
es ortogonal y su determinante es +1. Su traspuesta es igual a su inversa

de modo que d = a y c = − b y la matriz M es de la forma
Finalmente,
Así que los números a y b satisfacen además la propiedad que la suma de sus cuadrados vale 1. Por lo tanto, existe un número real θ para el cual
Concluimos que: toda matriz ortogonal de SO(2) puede escribirse como
con θ real.
CaracterizaciónSea A una matriz ortogonal n por n. Sean , , los n vectores fila de la matriz. En término de estos vectores, es muy fácil expresar los elementos de la matriz que resulta de muliplicar A por su transpuesta:
De modo que los vectores fila de una matriz ortogonal forman un conjunto de n vectores ortonormales. Puesto que la ecuación
también se verifica, tenemos que los vectores columna de la matriz A también forman un conjunto ortonormal de vectores. Como el recíproco de todo esto también es cierto, tenemos
Una matriz real A es ortogonal si y sólo si sus vectores filas o vectores columna son cada uno un conjunto ortonormal de vectores.
Es en este sentido que se dice que se ha hecho una caracterización de las matrices ortogonales. Dada una matriz, basta verificar esta propiedad entre sus vectores fila y columna para determinar si dicha matriz es o no ortogonal.
Propiedades De la definición, es inmediato que la si una matriz es ortogonal, la matriz es no singular o inversible y su
transpuesta coincide con su inversa

El determinante de una matriz ortogonal A es +1 ó -1. En efecto, de las propiedades del determinante tenemos
y por tanto,
El conjunto de matrices nxn ortogonales, junto con la operación de producto de matrices es un grupo llamado grupo ortogonal O(n). Supongamos que A y B son matrices ortogonales y sea C igual al producto de A por B. Usando las propiedades del producto de matrices, tenemos
y así, el producto de matrices ortogonales es una matriz ortogonal. En matemáticas, al grupo de matrices ortogonales n por n se denomina grupo ortogonal de dimensión n y se representa con O(n). En particular el subgrupo formado por las matrices ortogonales de determinante +1, se llama grupo especial ortogonal y se le representa con SO(n). Entre las matrices ortogonales se encuentran las matrices de rotación y las de permutación.
Notas1. ↑ Se sobreentiende que al espacio vectorial real, se le ha dotado de un producto interno
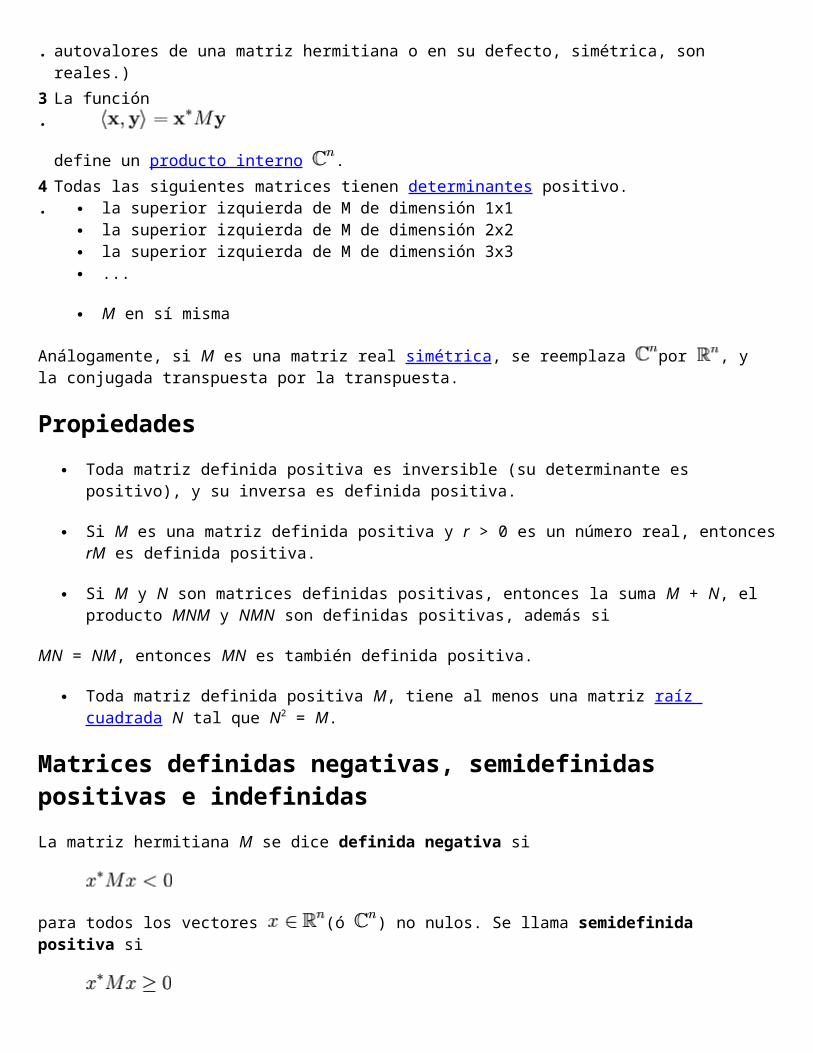
Matriz definida positivaEn el álgebra lineal, una matriz definida positiva es una matriz hermitiana que es análoga a los números reales positivos.
Definiciones equivalentesSea M una matriz hermitiana cuadrada n × n. De ahora en más notaremos la transpuesta de una matriz o vector a como aT, y el conjugado transpuesto, a * . Esta matriz M se dice definida positiva si cumple con una (y por lo tanto, las demás) de las siguientes formulaciones equivalentes:
1. Para todos los vectores no nulos tenemos que .
Nótese que z * Mz es siempre real.2. Todos los autovalores λi de M son positivos. (Recordamos que los autovalores de una matriz hermitiana o en su
defecto, simétrica, son reales.)3. La función
define un producto interno .

4. Todas las siguientes matrices tienen determinantes positivo. la superior izquierda de M de dimensión 1x1 la superior izquierda de M de dimensión 2x2 la superior izquierda de M de dimensión 3x3 ...
M en sí misma
Análogamente, si M es una matriz real simétrica, se reemplaza por , y la conjugada transpuesta por la transpuesta.
Propiedades Toda matriz definida positiva es inversible (su determinante es positivo), y su inversa es definida positiva.
Si M es una matriz definida positiva y r > 0 es un número real, entonces rM es definida positiva.
Si M y N son matrices definidas positivas, entonces la suma M + N, el producto MNM y NMN son definidas positivas, además si
MN = NM, entonces MN es también definida positiva.
Toda matriz definida positiva M, tiene al menos una matriz raíz cuadrada N tal que N2 = M.
Matrices definidas negativas, semidefinidas positivas e indefinidasLa matriz hermitiana M se dice definida negativa si
para todos los vectores (ó ) no nulos. Se llama semidefinida positiva si
para todo (ó ) y semidefinida negativa si
para todo (ó ).
Una matriz hermitiana, que no entra en ninguna de las clasificaciones anteriores se dice indefinida
Caso no hermitianoUna matriz real M puede tener la propiedad xTMx > 0 para todo vector real no nulo sin ser simétrica. La matriz

es un ejemplo. En general, tendremos xTMx > 0 para todo vector real no nulo x si y sólo si la matriz simétrica (M + MT) / 2, es definida positiva.
Matriz invertibleEn matemáticas, y especialmente en álgebra lineal, una matriz A de dimensiones n×n se dice que es invertible, inversible, inversa o no singular o regular si existe una matriz B de dimensiones n×n tal que
AB = BA = In,
donde In denota la matriz identidad de orden n (dimensiones n×n) y el producto utilizado es el producto de matrices usual. Una matriz no invertible se dice que es una matriz singular.
La inversa de la matriz A es única. Esto se denota por A-1.
Prueba de que la inversa es únicaSupongamos que B y C son inversas de A
AB = BA = I
AC = CA = I
Multiplicando por C
(BA)C = IC = C
(BA)C = B(AC) = BI = B
De modo que B=C y se prueba que la inversa es única.
La matriz inversa de A se denota por A − 1 y satisface la igualdad:
Esta viene dada por:
donde
= determinante de A
= matriz de adjuntos de A se multiplica en inversas

Propiedades de la matriz inversaLa inversa del producto de dos matrices es el producto de las inversas cambiando el orden:
Si la matriz es invertible, también lo es su transpuesta, y el inverso de su transpuesta es la transpuesta de su inversa, es decir:
Y, evidentemente:
Teorema sobre la inversibilidad de las matrices cuadradasSi A es una matriz de orden n, entonces existe B tal que AB = BA = I si y sólo si el determinante de A es distinto de cero.
Demostración
Se probará por doble implicación.
Necesidad
Suponiendo que existe B tal que AB = BA = I. Entonces al aplicar la función determinante se obtiene
usando la propiedad det(I) = 1
Por lo tanto, det(A) es distinto de cero.
Suficiencia
Suponiendo que el determinate de A es distinto de cero, sea aij es el elemento ij de la matriz A y sea Aij la matriz A sin la fila i y la columna j (comúnmente conocida como j-ésimo menor de A). Entonces
Sea , entonces

Esta afirmación es válida propiedades de los determinantes, pues la parte izquierda de la relación nos conduce a una matriz con la columna j igual a la columna k y los demás términos iguales a los de A. Entonces
donde δjk = 1 cuando j = k y δjk = 0 cuando . Entonces
Es decir que A tiene inversa izquierda
Como , entonces At también tiene inversa izquierda que es
Entonces
luego entonces, aplicando la transpuesta
Que es lo que se quería demostrar
Gradiente
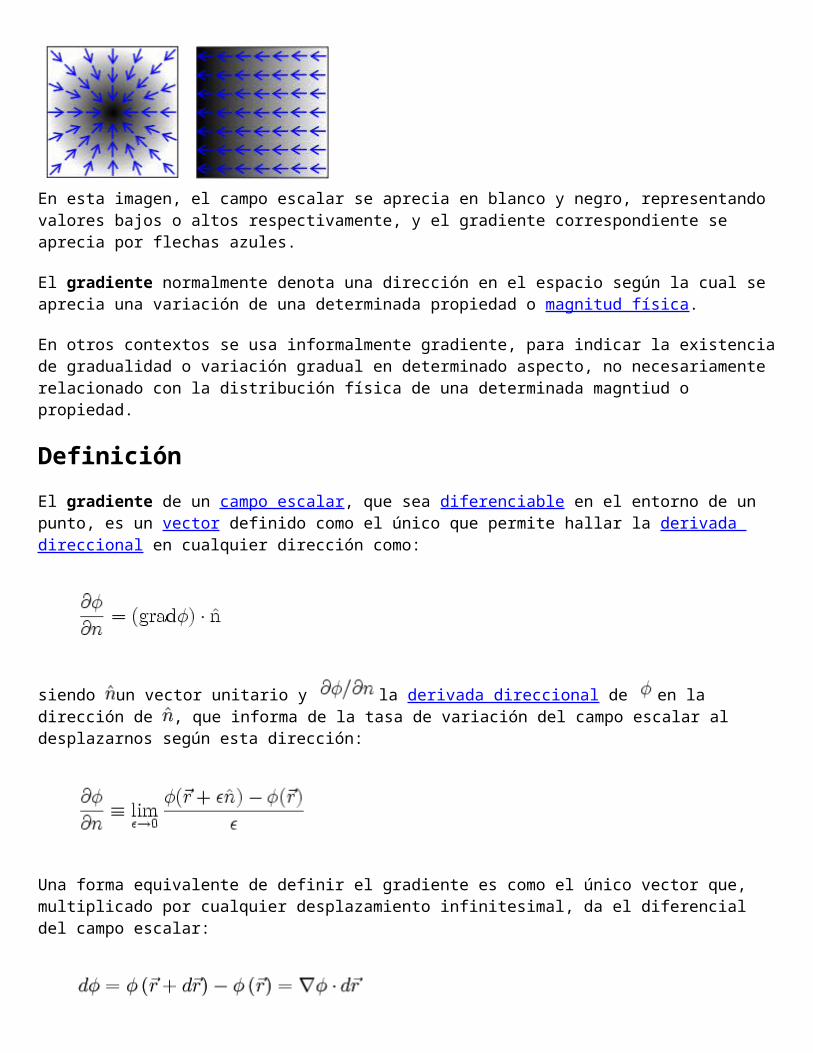
En esta imagen, el campo escalar se aprecia en blanco y negro, representando valores bajos o altos respectivamente, y el gradiente correspondiente se aprecia por flechas azules.
El gradiente normalmente denota una dirección en el espacio según la cual se aprecia una variación de una determinada propiedad o magnitud física.
En otros contextos se usa informalmente gradiente, para indicar la existencia de gradualidad o variación gradual en determinado aspecto, no necesariamente relacionado con la distribución física de una determinada magntiud o propiedad.
DefiniciónEl gradiente de un campo escalar, que sea diferenciable en el entorno de un punto, es un vector definido como el único que permite hallar la derivada direccional en cualquier dirección como:
siendo un vector unitario y la derivada direccional de en la dirección de , que informa de la tasa de variación del campo escalar al desplazarnos según esta dirección:
Una forma equivalente de definir el gradiente es como el único vector que, multiplicado por cualquier desplazamiento infinitesimal, da el diferencial del campo escalar:
Con la definición anterior, el gradiente está caracterizado de forma unívoca. El gradiente se expresa alternativamente mediante el uso del operador nabla:

Interpretación del GradienteDe forma geométrica el gradiente es un vector que se encuentra normal a una superficie o curva en el espacio a la
cual se le esta estudiando, en un punto cualquiera, llamese , , etcétera, algunos ejemplos son:
Considere una habitación en la cual la temperatura se define a través de un campo escalar, de tal manera que en
cualquier punto , la temperatura es . Asumiremos que la temperatura no varia con respecto al tiempo. Siendo esto así, para cada punto de la habitación, el gradiente en ese punto nos dará la dirección en la cual se calienta más rápido. La magnitud del gradiente nos dirá cuán rápido se calienta en esa dirección. Ahora
considere una montaña en la cual su altura en el punto se define como .
El gradiente de H en ese punto estará en la dirección del punto a mayor grado de inclinación. La magnitud del gradiente nos mostrará cuán empinada se encuentra la pendiente. Así se demuestra:
Aproximación lineal de una función El gradiente de una función f definida de Rn a R caracteriza la mejor aproximación lineal de la función en un punto particular x0 en Rn. Se expresa así:
donde es el gradiente evaluado en x0.
Propiedades El gradiente verifica que:
Es ortogonal a las superficies equiescalares, definidas por =cte.. Apunta en la dirección en que la derivada direccional es máxima. Su módulo es igual a esta derivada direccional máxima. Se anula en los puntos estacionarios (máximos, mínimos y puntos de silla) El campo formado el gradiente en cada punto es siempre irrotacional, esto es,
Expresión en diferentes sistemas de coordenadas A partir de su definición puede hallarse su expresión en diferentes sistemas de coordenadas.
En coordenadas cartesianas, su expresión es simplemente

En un sistema de coordenadas ortogonales, el gradiente requiere los factores de escala, mediante la expresión
Para coordenadas cilíndricas (hρ = hz = 1, ) resulta
y para coordenadas esféricas (hr = 1, hθ = r, )
Gradiente de un campo vectorial En un espacio euclídeo, el concepto de gradiente también puede extenderse al caso de un campo vectorial, siendo el gradiente de un tensor que da el diferencial del campo al realizar un desplazamiento
Este tensor podrá representarse por una matriz , que en coordendas cartesianas está formada por las tres derivadas parciales de las tres componentes del campo vectorial.
Ejemplo Dada la función f(x,y,z) = 2x + 3y2 − sin(z) su vector gradiente es:
Aplicaciones en física El gradiente posee innumerables aplicaciones en física, especialmente en electromagnetismo y mecánica de fluidos. En particular, existen muchos campos vectoriales que puede escribirse como el gradiente de un potencial escalar.
Uno de ellos es el campo electrostático, que deriva del potencial eléctrico
Todo campo que pueda escribirse como el gradiente de un campo escalar, se denomina potencial, conservativo o irrotacional. Así, una fuerza conservativa deriva de la energía potencial como

Los gradientes también aparecen en los procesos de difusión que verifican la ley de Fick o la ley de Fourier para la temperatura. Así, por ejemplo, el flujo de calor en un material es proporcional al gradiente de temperaturas
siendo k la conductividad térmica.
JacobianoEn cálculo vectorial, el jacobiano es una abreviación de la matriz jacobiana y su determinante, el determinante Jacobiano. Son llamados así en honor al matemático Carl Gustav Jacobi.
En geometría algebraica, el jacobiano de una curva hace referencia a la variedad jacobiana, un grupo y variedad algebraica asociada a la curva, donde la curva puede ser embebida.
Matriz JacobianaLa matriz Jacobiana es una matriz formada por las derivadas parciales de primer orden de una función. Una de las aplicaciones más interesantes de esta matriz es la posibilidad de aproximar linealmente a la función en un punto. En este sentido, el Jacobiano representa la derivada de una función multivariable.
Supongamos F : Rn → Rm es una función que va del espacio euclidiano n-dimensional a otro espacio euclideano m-dimensional. Esta función está determinada por m funciones reales: y1(x1,...,xn), ..., ym(x1,...,xn). Las derivadas parciales de estas (si existen) pueden ser organizadas en una matriz m por n, la matriz Jacobiana de F:
Esta matriz es notada por
o como
La i-ésima fila está dada por el gradiente de la función yi, para i=1,...,m.
Si p es un punto de Rn y F es diferenciable en p, entonces su derivada está dada por JF(p). En este caso, la aplicación lineal descrita por JF(p) es la mejor aproximación lineal de F cerca del punto p, de esta manera:

para x cerca de p.
Ejemplo
El Jacobiano de la función F : R3 → R3 definida como:
es:
No siempre un Jacobiano es cuadrado.
Matriz Jacobiana de un campo vectorial
En cálculo vectorial, la matriz Jacobiana para un campo vectorial es la matriz de orden mxn que tiene como elementos a las derivadas parciales (si existen) de la función. Por ejemplo, se desea obtener la
'Matriz Jacobiana' de la diferencial de una función de Rn a Rm en el punto .
Usando: en la fórmula:
.
Dividiendo por l, y haciendo tender l a 0, se obtiene:
Este es el vector que va en la primera columna de la matriz buscada. Por analogía para , se consiguen las demás columnas. De este modo, la matriz Jacobiana de en el punto es:
Esta matriz se denota también por:
o
Determinante Jacobiano Si m = n, entonces F es una función que va de un espacio n-dimensional a otro. En este caso la matriz Jacobiana es cuadrada y podemos calcular su determinante, conocido como el determinante Jacobiano.
El determinante Jacobiano en un punto dado nos da información importante sobre el comportamiento de F cerca de ese punto. Para empezar, una función F es invertible cerca de p si el determinante Jacobiano en p es no nulo. Más aún, el valor absoluto del determinate en p nos da el factor con el cual F expande o contrae su volumen cerca de p.
Ejemplo
El determinante Jacobiano de la función F : R3 → R3 definida como:
es:
La función es localmente invertible excepto donde x1=0 ó x2=0. Si imaginamos un objeto pequeño centrado en el punto (1,1,1) y le aplicamos F, tendremos un objeto de aproximadamente 40 veces más volumen que el original.
Matriz nilpotenteUna matriz se dice nilpotente si existe tal que Nk = 0.
Si A es una matriz nilpotente entonces |A|=0.
Demostración Si A es una matriz nilpotente de orden k, A^k=0. Por tanto |A^k|=0, luego |A|^k=0, y en consecuencia |A|=0.

Matriz normalUno o más wikipedistas están trabajando actualmente en extender este artículo. Es posible que, a causa de ello, haya lagunas de contenido o deficiencias de formato. Por favor, antes de realizar correcciones mayores o reescrituras, contacta con ellos en su página de usuario o en la página de discusión del artículo para poder coordinar la redacción.
Sea A matriz compleja cuadrada, entonces es una matriz normal si y sólo si
A * A = AA *
donde A* es el conjugado transpuesto de A (también llamado hermitiano)
EjemplosEsta matriz de orden 2 es normal.
debido a que ..
Propiedades Una importante propiedad de este tipo de matrices es que son diagonalizables.
Demostración:
Sea A matriz compleja cuadrada normal. Entonces puede expresarse, utilizando la descomposición de Schur, de esta manera:
A = QUQ *
Demostraremos que la matriz U es diagonal, por ahora solo sabemos que es triangular superior. Formalmente, definimos estas condiciones con números, ya que serán usadas en la demostración:

ak1 = 0 (1) ak2 = 0 (2) ... akn − 1 = 0 (n-1)
Usando el hecho que A es normal:
A * A = (QUQ * ) * (QUQ * ) = QU * (Q * Q)(a)UQ * = QU * UQ *
Idénticamente.
(QUQ * )(QUQ * ) * = QUU * Q *
Postmultiplicando por Q y luego premultiplicando por Q * obtenemos: U * U = UU *
Lo cual da lugar a estas dos multiplicaciones matriciales:
Para nuestros propósitos, nos interesan los elementos de las diagonales.

Ahora utilizamos un procedimiento inductivo para probar que esta matriz producto es diagonal (sus elementos son ceros fuera de la diagonal principal)
Caso i=1: (U * U)11 = (UU * )11
Separamos el elemento diagonal de las sumatorias.
Usando (1)
Por lo tanto, a1j = 0
Matriz ceroUna matriz de nxm elementos:
es una matriz cero si aji = 0 para todo i=1,2,3,...,n y j=1,2,3,...m. Por lo tanto, la matriz A asume la forma:

Esta matriz también se le suele llamar matriz nula y se denota por 0. Una matriz cero es, al mismo tiempo, matriz simétrica, matriz antisimétrica, matriz nilpotente y matriz singular.
Matriz singularUna matriz cuadrada A de orden n es singular si su determinante es nulo. Algunos autores llaman a estas matrices degeneradas. En tal caso se dice que dicha matriz no tiene inversa.
Matriz triangularUna matriz de nxm elementos:
es triangular superior, si es una matriz cuadrada y aij = 0 para todo i>j (i,j =1,2,3,...,n). Es decir,

En caso contrario, si aij = 0 para todo i<j (i,j =1,2,3,...,n), entonces A es matriz triangular inferior que tiene la forma:
Por ejemplo, para n = 3:
es triangular superior y
es triangular inferior.
Se suelen emplear las letras U y L, respectivamente, ya que U es la inicial de "upper triangular matrix" y L de "lower triangular matrix", los nombres que reciben estas matrices están en inglés.
En general, se pueden realizar las operaciones en estas matrices en la mitad de tiempo. El determiante de una matriz triangular es el producto de los elementos de la diagonal principal.

Matrices definidas positivas, negativas, semidefinidas positivas e indefinidas En el álgebra lineal, una matriz definida positiva es una matriz hermitiana que es análoga a los números reales positivos.
Definiciones equivalentesSea M una matriz hermitiana cuadrada n × n. De ahora en más notaremos la transpuesta de una matriz o vector a como aT, y el conjugado transpuesto, a * . Esta matriz M se dice definida positiva si cumple con una (y por lo tanto, las demás) de las siguientes formulaciones equivalentes:
1. Para todos los vectores no nulos tenemos que .
Nótese que z * Mz es siempre real.2. Todos los autovalores λi de M son positivos. (Recordamos que los autovalores de una matriz hermitiana o en su
defecto, simétrica, son reales.)3. La función
define un producto interno .4. Todas las siguientes matrices tienen determinantes positivo.
la superior izquierda de M de dimensión 1x1 la superior izquierda de M de dimensión 2x2 la superior izquierda de M de dimensión 3x3 ...
M en sí misma
Análogamente, si M es una matriz real simétrica, se reemplaza por , y la conjugada transpuesta por la transpuesta.
Propiedades Toda matriz definida positiva es inversible (su determinante es positivo), y su inversa es definida positiva.
Si M es una matriz definida positiva y r > 0 es un número real, entonces rM es definida positiva.
Si M y N son matrices definidas positivas, entonces la suma M + N, el producto MNM y NMN son definidas positivas, además si
MN = NM, entonces MN es también definida positiva.
Toda matriz definida positiva M, tiene al menos una matriz raíz cuadrada N tal que N2 = M.
Matrices definidas negativas, semidefinidas positivas e indefinidas

La matriz hermitiana M se dice definida negativa si
para todos los vectores (ó ) no nulos. Se llama semidefinida positiva si
para todo (ó ) y semidefinida negativa si
para todo (ó ).
Una matriz hermitiana, que no entra en ninguna de las clasificaciones anteriores se dice indefinida
Caso no hermitiano Una matriz real M puede tener la propiedad xTMx > 0 para todo vector real no nulo sin ser simétrica. La matriz
es un ejemplo. En general, tendremos xTMx > 0 para todo vector real no nulo x si y sólo si la matriz simétrica (M + MT) / 2, es definida positiva.