la ingenieria puede ayudar a solucionar desafios de ... · despues de varios incidentes repetitivos...
TRANSCRIPT
Despues de varios incidentes repetitivos del cual sistema por sobrecarga un equipo de especialistas fue enviado para analizar el problema EI equipo decidio analizar todo el proceso y no solo el sistema de tratamiento de aire EI metodo seleccionado fue un AFM para visualizar el proceso tener la opcion de simulaciones y tam bien evaluar las consecuencias ecologicas de los escenarios simulados
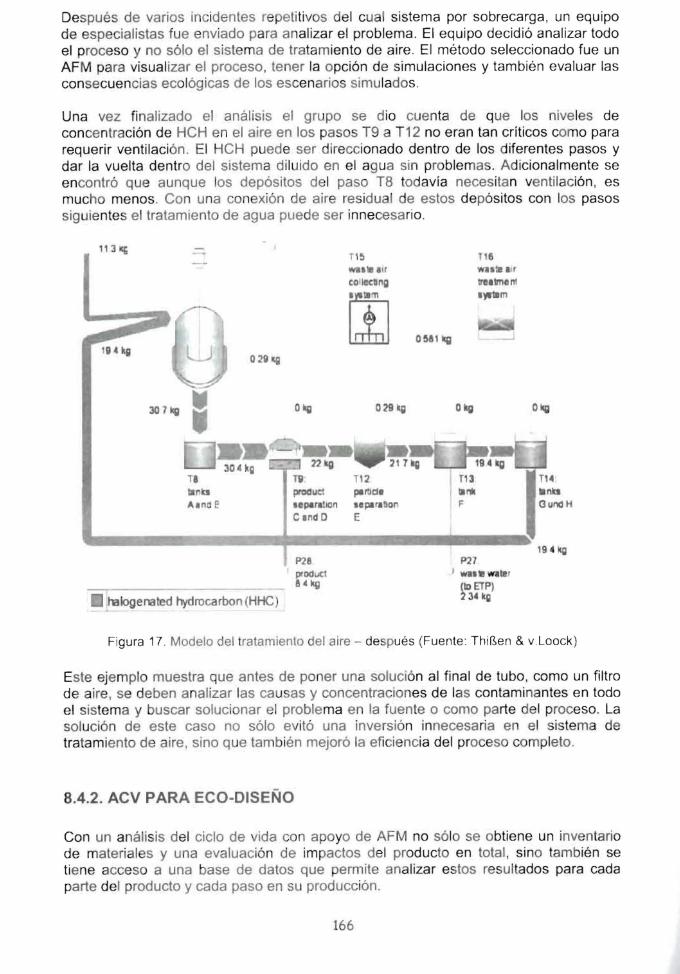
Una vez fi nalizado el analisis el grupo se dio cuenta de que los niveles de concentracion de HCH en el aire en los pasos T9 a T12 no eran tan criticos como para requerir ventilaci6n EI HCH puede ser direccionado dentro de los diferentes pasos y dar la vuelta dentro del sistema dil uido en el agua sin problemas Adicionalmente se encontro que aunque los depositos del paso T8 todavia necesitan ventilaci6n es mucho menos Con una conexion de aire res idual de estos depositos con los pasos siguientes el tratamiento de agua puede ser innecesario
TI lInu end e
mlogenated hydrocarbon (HHC
o291qj ~22kQ
TV T1 2 procIuct plrJde separaUon parallon C Ina 0 E
P2amp ptodUCl 8Hg
Okg
T1l I lank
F
P21 _ bullbull wlllIl
(ID ETP) 3 kg
Ohg
Tl4 nq OunOH
19 4 leg
Figura 17 Modelo del tratamiento del aire - despues (Fuente Thi[len amp vLoock)
Este ejemplo muestra que antes de poner una soluci6n al final de tubo como un filtro de aire se deben analizar las causas y concentraciones de las contaminantes en todo el sistema y buscar solucionar el problema en la fuente 0 como parte del proceso La soluci6n de este caso no solo evito una inversion innecesaria en el sistema de tratamiento de aire sino que tambien mejoro la eficiencia del proceso completo
842 ACV PARA ECO-DISENO
Con un analisis del cicio de vida con apoyo de AFM no solo se obtiene un inventario de materiales y una evaluacion de impactos del producto en total sino tambien se tiene acceso a una base de datos que permite analizar estos resultados para cada parte del producto y cada paso en su producci6n
166
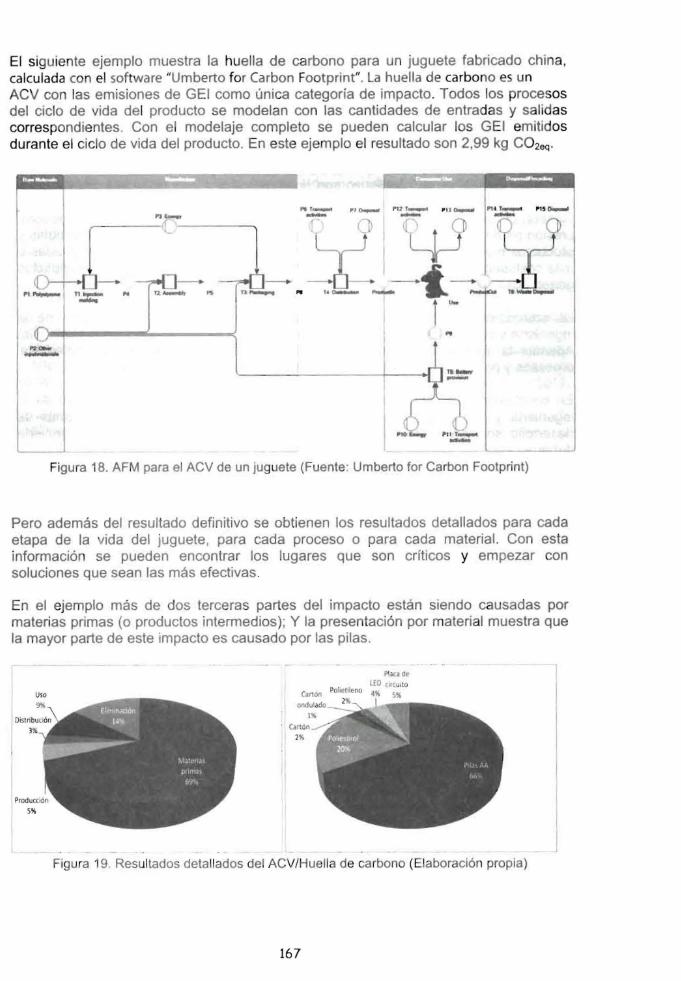
EI siguiente ejemplo muestra la huella de carbon~ para un juguete fabricado china calculada con el software Umberto for Carbon Footprint La huella de carbono es un ACV con las emisiones de GEl como (mica categoria de impacto Todos los procesos del cicio de vida del producto se modelan con las cantidades de entradas y salidas correspondientes Con el modelaje completo se pueden calcular los GEl emitidos durante el cicio de vida del producto En este ejemplo el resullado son 299 kg C0 2eq
shy
If --
PI ___ ~ m ___ 1) ~-(
I
shy - PO - ~-t-I 1~
Figura 18 AFM para el ACV de un juguete (Fuente Umberto for Carbon Footprint)
Pero ademas del resultado definitiv~ se obtienen los resultados detaliados para cada etapa de la vida del juguete para cada proceso 0 para cada material Con esta informacion se pueden encontrar los lugares Que son criticos y empezar con soluciones Que sean las mas efectivas
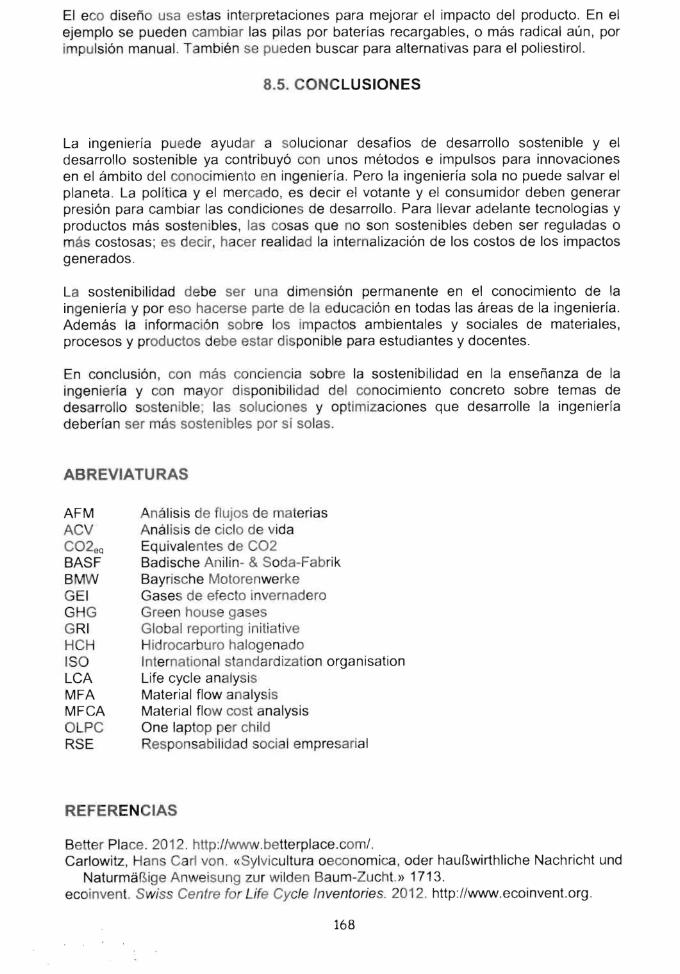
En el ejemplo mas de dos terceras partes del impacto estan siendo causadas por materias primas (0 productos intermedios) Y la presentacion por material muestra Que la mayor parte de este impacto es causado por las pi las
I WIno
I
Pia de LEO dfCUltO
4 5
Figura 19 Resultados detalados del ACVHuelia de carbono (Elaboracion propia)
167
EI eco diseno usa estas interpretaciones para mejorar el impacto del producto En el ejemplo se pueden cambiar las pilas por baterias recargables 0 mas radical aun por impulsi6n manual TambiEln se pueden buscar para alternativas para el poliestirol
85 CONCLUSIONES
La ingenieria puede ayudar a solucionar desafios de desarrollo sostenible y el desarrollo sostenible ya contribuy6 con unos metodos e impulsos para innovaciones en el ambito del conocimiento en ingenieria Pero la ingenieria sola no puede salvar el planeta La politica y el mercado es decir el votante y el consumidor deben generar presi6n para cambiar las condiciones de desarrollo Para Ilevar adelante tecnologias y productos mas sostenibles las cosas que no son sostenibles deben ser reguladas 0
mas costosas es decir hacer realidad la internalizaci6n de los costos de los impactos generados
La sostenibilidad debe ser una dimensi6n permanente en el conocimiento de la ingenieria y por eso hacerse parte de la educaci6n en todas las areas de la ingenieria Ademas la informaci6n sobre los impactos ambientales y sociales de materiales procesos y productos debe estar disponible para estudiantes y docentes
En conclusi6n con mas conciencia sobre la sostenibil idad en la ensenanza de la ingenierfa y con mayor disponibilidad del conocimiento concreto sobre temas de desarrollo sostenible las soluciones y optimizaciones que desarrolie la ingenierfa deberfan ser mas sostenibles por sf solas
ABREVIATU RAS
AFM Analisis de flujos de materias ACV Analisis de cicio de vida C02eQ Equivalentes de C02 BASF Badische An ilin- amp Soda-Fabrik BMW Bayrische Motorenwerke GEl Gases de efecto invernadero GHG Green house gases GRI Global reporting initiative HCH Hidrocarburo halogenado ISO International standardization organisation LCA Life cycle analysis MFA Material flow analysis MFCA Material flow cost analysis OLPC One laptop per child RSE Responsabilidad social empresarial
REFERENCIAS
Better Place 2012 httpwwwbetterplacecom Carlowitz Hans Carl von laquoSylvicultura oeconomica oder haurwirthliche Nachricht und
Naturmii r ige Anweisung zur wilden Baum-Zuchtraquo 1713 ecoinvent Swiss Centre for Life Cycle Inventories 201 2 httpwwwecoinventorg
168
GRI Global Reporting Index 2012 httpwwwgri org Hoffmann Volker y Matthias Kuss laquoTechnologiemanagement amp Nachhaltigkeit raquo
Universitat LOneburg CSM 2009 Hopfenbeck W y C Jasch laquoUmweltorientierte Produktpolitik Moderne Industrie
LandsbergLech raquo Oko-Design 1995 Lieber Andreas laquoIntroduccion a la gestion sostenible raquo CEGESTI 2010 Lozano Rodrigo laquoEnvisioning sustainability three-dimensionallyraquo Journal of Cleaner
Production 162008 1838-1846 Meadows D The Limits to Growth Second Edition Revised Signet ISBN 73-187907
1974 Michelsen Gerd laquoGrundlagen einer nachhaltigen Entwicklung raquo Universitat LOneburg
CSM sf OECD Measuring material flows and resource productivity Volume I The OECD
Guide 2008 http www oecd orgdataoecd464840485853pdf Porter Michael E y Claas van der Linde laquoGreen and Competitive Ending the
Stalemateraquo 1996 Prox Martina laquoConceptos y Herramientas practicas para la Gestion Sostenible
Empresarial Cuantitativa raquo s f Riezn ik Lamana Natal ia y Agustin Hernandez Aja Analisis del cicio de vida 2005
httphabitataq upmestemasa-anal isis-ciclo-vidahtml Royal Society People and the planet report 2012
httproyalsocietyorgpolicyprojectspeople-planetlreportl Schaltegger Stefan y Holger Petersen laquoEinfUhrung in des
Nachhaltigkeitsmanagement raquo Universitat UJneburg CSM 2008 Schmidt Mario laquoStoffstromanalysen in Okobilanzen und Oko-Aud its raquo 1995 Schmidt Mario laquoUmweltbilanzen zwischen Produkt- und Unternehmensbezug raquo 2008 Tecnol6gico de Monterrey Instituto Tecnol6gico y de Estudios Superiores de
Monterrey Mexico 2012 httpwwwitesmeduwpswcmconnectlitesmtecnologico+de+monterreycarreras+prof
esionalesareas+de+estudioingenieria+y+cienciasids Thi~en Nikolaus y Jan van Look laquoFrom Waste Air Treatment to Resource
Efficiencyraquo Chemie Ingenieur Technik 2011 1573- 1581 United Nations Report of the World Commission on Environment and Development
General Assembly Resolution 421187 1987 Wuppertal Institut Oko-Innovationen Faktor Vier Faktor Zehn und aktuelle Ansatze
2012 httpwwwwupperi nstorgprojektethemen_onlineoeko_innovationenindexhtml (ultimo acceso 03 de Abril de 2012)
169
9 OPTIMIZACION EN IMAGENES A COLOR UTILIZANDO INTERPOLACION CON FUNCIONES DE BASE RADIAL
[11Jaime Alberto Echeverri Arias [21Jorge Eliecer Rudas Castano
jaecheverriudemeduco jrudascasgmailcom
[11 Universidad de Medellin [21Universidad del Magdalena
RESUMEN
Este capitulo presenta un metodo para suprimir ruido impulsivo en imagenes a color utilizando interpolaci6n a traves de funciones de base radial Este es un problema clasico en multiples aplicaciones en diferentes areas su arigen radica en mecanismos de captaci6n de datos defectuosos que generan errores a interval os variados de tiempo en las senales de entrada
Se comparan los resultados obtenidos con el metodo propuesto frente a los algoritmos clasicos no lineales como el filtrado par la mediana la media y el de outlier En todos los escenarios probados los resultados fueron mas eficaces con el metodo propuesto EI algoritmo demostr6 ser robusto frente a grandes volumenes de ruido en el caso de prueba Los resultados fueron analizados a traves del error cuadrado medio (ECM) y Peak Signal to Noise Ratio (PSNR) que son dos metricas de uso comun para comparar la calidad entre dos imagenes luego de un proceso de restauraci6n Se alcanz6 un ECM de 14 y un PSNR de 358 db sobre la imagen de Lenna a 51 2x512 pixeles con un porcentaje de pixeles ruido del 40
Palabras clave Filtro no lineal de imagenes funciones de base radial interpolaci6n ruido impulsivo
91 INTRODUCCION
EI ruido en una imagen es cualquier degradaci6n sobre la senal origen producida por factores ex-ternos al sistema (Mcandrew 2004) En el procesamiento de imagenes el ruido se presenta como alteraciones de los valores de los pixeles que componen dicha imagen EI ruido puede producirse durante la captura la transmisi6n 0 el procesamiento de alguna senal La naturaleza del ruido (ruido gaussiano ruido impulsivo ruido uniforme ruido multiplicativo etc para ampliar vease (Mythili y Kavitha 2011 )) determina la estrategia para su supresi6n
Existen muchos algoritmos de comportamiento no lineal para la supresi6n del ruido impulsivo como el filtrado por la mediana y el de la media sin embargo estas tecnicas presentan desventajas como la modificaci6n de todos los pixeles de la imagen distorsionando aun pixeles no ruidosos
171
Hernandez Riveros Jesus Antonio Optim izaci6n de Conocimiento en tngenieria ISBN 978-958-76 1-433 -6 Centro de Publicaclones Unive rsid ad Nacional de Colombia Sede Medell in 2013
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176
EI siguiente ejemplo muestra la huella de carbon~ para un juguete fabricado china calculada con el software Umberto for Carbon Footprint La huella de carbono es un ACV con las emisiones de GEl como (mica categoria de impacto Todos los procesos del cicio de vida del producto se modelan con las cantidades de entradas y salidas correspondientes Con el modelaje completo se pueden calcular los GEl emitidos durante el cicio de vida del producto En este ejemplo el resullado son 299 kg C0 2eq
shy
If --
PI ___ ~ m ___ 1) ~-(
I
shy - PO - ~-t-I 1~
Figura 18 AFM para el ACV de un juguete (Fuente Umberto for Carbon Footprint)
Pero ademas del resultado definitiv~ se obtienen los resultados detaliados para cada etapa de la vida del juguete para cada proceso 0 para cada material Con esta informacion se pueden encontrar los lugares Que son criticos y empezar con soluciones Que sean las mas efectivas
En el ejemplo mas de dos terceras partes del impacto estan siendo causadas por materias primas (0 productos intermedios) Y la presentacion por material muestra Que la mayor parte de este impacto es causado por las pi las
I WIno
I
Pia de LEO dfCUltO
4 5
Figura 19 Resultados detalados del ACVHuelia de carbono (Elaboracion propia)
167
EI eco diseno usa estas interpretaciones para mejorar el impacto del producto En el ejemplo se pueden cambiar las pilas por baterias recargables 0 mas radical aun por impulsi6n manual TambiEln se pueden buscar para alternativas para el poliestirol
85 CONCLUSIONES
La ingenieria puede ayudar a solucionar desafios de desarrollo sostenible y el desarrollo sostenible ya contribuy6 con unos metodos e impulsos para innovaciones en el ambito del conocimiento en ingenieria Pero la ingenieria sola no puede salvar el planeta La politica y el mercado es decir el votante y el consumidor deben generar presi6n para cambiar las condiciones de desarrollo Para Ilevar adelante tecnologias y productos mas sostenibles las cosas que no son sostenibles deben ser reguladas 0
mas costosas es decir hacer realidad la internalizaci6n de los costos de los impactos generados
La sostenibilidad debe ser una dimensi6n permanente en el conocimiento de la ingenieria y por eso hacerse parte de la educaci6n en todas las areas de la ingenieria Ademas la informaci6n sobre los impactos ambientales y sociales de materiales procesos y productos debe estar disponible para estudiantes y docentes
En conclusi6n con mas conciencia sobre la sostenibil idad en la ensenanza de la ingenierfa y con mayor disponibilidad del conocimiento concreto sobre temas de desarrollo sostenible las soluciones y optimizaciones que desarrolie la ingenierfa deberfan ser mas sostenibles por sf solas
ABREVIATU RAS
AFM Analisis de flujos de materias ACV Analisis de cicio de vida C02eQ Equivalentes de C02 BASF Badische An ilin- amp Soda-Fabrik BMW Bayrische Motorenwerke GEl Gases de efecto invernadero GHG Green house gases GRI Global reporting initiative HCH Hidrocarburo halogenado ISO International standardization organisation LCA Life cycle analysis MFA Material flow analysis MFCA Material flow cost analysis OLPC One laptop per child RSE Responsabilidad social empresarial
REFERENCIAS
Better Place 2012 httpwwwbetterplacecom Carlowitz Hans Carl von laquoSylvicultura oeconomica oder haurwirthliche Nachricht und
Naturmii r ige Anweisung zur wilden Baum-Zuchtraquo 1713 ecoinvent Swiss Centre for Life Cycle Inventories 201 2 httpwwwecoinventorg
168
GRI Global Reporting Index 2012 httpwwwgri org Hoffmann Volker y Matthias Kuss laquoTechnologiemanagement amp Nachhaltigkeit raquo
Universitat LOneburg CSM 2009 Hopfenbeck W y C Jasch laquoUmweltorientierte Produktpolitik Moderne Industrie
LandsbergLech raquo Oko-Design 1995 Lieber Andreas laquoIntroduccion a la gestion sostenible raquo CEGESTI 2010 Lozano Rodrigo laquoEnvisioning sustainability three-dimensionallyraquo Journal of Cleaner
Production 162008 1838-1846 Meadows D The Limits to Growth Second Edition Revised Signet ISBN 73-187907
1974 Michelsen Gerd laquoGrundlagen einer nachhaltigen Entwicklung raquo Universitat LOneburg
CSM sf OECD Measuring material flows and resource productivity Volume I The OECD
Guide 2008 http www oecd orgdataoecd464840485853pdf Porter Michael E y Claas van der Linde laquoGreen and Competitive Ending the
Stalemateraquo 1996 Prox Martina laquoConceptos y Herramientas practicas para la Gestion Sostenible
Empresarial Cuantitativa raquo s f Riezn ik Lamana Natal ia y Agustin Hernandez Aja Analisis del cicio de vida 2005
httphabitataq upmestemasa-anal isis-ciclo-vidahtml Royal Society People and the planet report 2012
httproyalsocietyorgpolicyprojectspeople-planetlreportl Schaltegger Stefan y Holger Petersen laquoEinfUhrung in des
Nachhaltigkeitsmanagement raquo Universitat UJneburg CSM 2008 Schmidt Mario laquoStoffstromanalysen in Okobilanzen und Oko-Aud its raquo 1995 Schmidt Mario laquoUmweltbilanzen zwischen Produkt- und Unternehmensbezug raquo 2008 Tecnol6gico de Monterrey Instituto Tecnol6gico y de Estudios Superiores de
Monterrey Mexico 2012 httpwwwitesmeduwpswcmconnectlitesmtecnologico+de+monterreycarreras+prof
esionalesareas+de+estudioingenieria+y+cienciasids Thi~en Nikolaus y Jan van Look laquoFrom Waste Air Treatment to Resource
Efficiencyraquo Chemie Ingenieur Technik 2011 1573- 1581 United Nations Report of the World Commission on Environment and Development
General Assembly Resolution 421187 1987 Wuppertal Institut Oko-Innovationen Faktor Vier Faktor Zehn und aktuelle Ansatze
2012 httpwwwwupperi nstorgprojektethemen_onlineoeko_innovationenindexhtml (ultimo acceso 03 de Abril de 2012)
169
9 OPTIMIZACION EN IMAGENES A COLOR UTILIZANDO INTERPOLACION CON FUNCIONES DE BASE RADIAL
[11Jaime Alberto Echeverri Arias [21Jorge Eliecer Rudas Castano
jaecheverriudemeduco jrudascasgmailcom
[11 Universidad de Medellin [21Universidad del Magdalena
RESUMEN
Este capitulo presenta un metodo para suprimir ruido impulsivo en imagenes a color utilizando interpolaci6n a traves de funciones de base radial Este es un problema clasico en multiples aplicaciones en diferentes areas su arigen radica en mecanismos de captaci6n de datos defectuosos que generan errores a interval os variados de tiempo en las senales de entrada
Se comparan los resultados obtenidos con el metodo propuesto frente a los algoritmos clasicos no lineales como el filtrado par la mediana la media y el de outlier En todos los escenarios probados los resultados fueron mas eficaces con el metodo propuesto EI algoritmo demostr6 ser robusto frente a grandes volumenes de ruido en el caso de prueba Los resultados fueron analizados a traves del error cuadrado medio (ECM) y Peak Signal to Noise Ratio (PSNR) que son dos metricas de uso comun para comparar la calidad entre dos imagenes luego de un proceso de restauraci6n Se alcanz6 un ECM de 14 y un PSNR de 358 db sobre la imagen de Lenna a 51 2x512 pixeles con un porcentaje de pixeles ruido del 40
Palabras clave Filtro no lineal de imagenes funciones de base radial interpolaci6n ruido impulsivo
91 INTRODUCCION
EI ruido en una imagen es cualquier degradaci6n sobre la senal origen producida por factores ex-ternos al sistema (Mcandrew 2004) En el procesamiento de imagenes el ruido se presenta como alteraciones de los valores de los pixeles que componen dicha imagen EI ruido puede producirse durante la captura la transmisi6n 0 el procesamiento de alguna senal La naturaleza del ruido (ruido gaussiano ruido impulsivo ruido uniforme ruido multiplicativo etc para ampliar vease (Mythili y Kavitha 2011 )) determina la estrategia para su supresi6n
Existen muchos algoritmos de comportamiento no lineal para la supresi6n del ruido impulsivo como el filtrado por la mediana y el de la media sin embargo estas tecnicas presentan desventajas como la modificaci6n de todos los pixeles de la imagen distorsionando aun pixeles no ruidosos
171
Hernandez Riveros Jesus Antonio Optim izaci6n de Conocimiento en tngenieria ISBN 978-958-76 1-433 -6 Centro de Publicaclones Unive rsid ad Nacional de Colombia Sede Medell in 2013
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176
EI eco diseno usa estas interpretaciones para mejorar el impacto del producto En el ejemplo se pueden cambiar las pilas por baterias recargables 0 mas radical aun por impulsi6n manual TambiEln se pueden buscar para alternativas para el poliestirol
85 CONCLUSIONES
La ingenieria puede ayudar a solucionar desafios de desarrollo sostenible y el desarrollo sostenible ya contribuy6 con unos metodos e impulsos para innovaciones en el ambito del conocimiento en ingenieria Pero la ingenieria sola no puede salvar el planeta La politica y el mercado es decir el votante y el consumidor deben generar presi6n para cambiar las condiciones de desarrollo Para Ilevar adelante tecnologias y productos mas sostenibles las cosas que no son sostenibles deben ser reguladas 0
mas costosas es decir hacer realidad la internalizaci6n de los costos de los impactos generados
La sostenibilidad debe ser una dimensi6n permanente en el conocimiento de la ingenieria y por eso hacerse parte de la educaci6n en todas las areas de la ingenieria Ademas la informaci6n sobre los impactos ambientales y sociales de materiales procesos y productos debe estar disponible para estudiantes y docentes
En conclusi6n con mas conciencia sobre la sostenibil idad en la ensenanza de la ingenierfa y con mayor disponibilidad del conocimiento concreto sobre temas de desarrollo sostenible las soluciones y optimizaciones que desarrolie la ingenierfa deberfan ser mas sostenibles por sf solas
ABREVIATU RAS
AFM Analisis de flujos de materias ACV Analisis de cicio de vida C02eQ Equivalentes de C02 BASF Badische An ilin- amp Soda-Fabrik BMW Bayrische Motorenwerke GEl Gases de efecto invernadero GHG Green house gases GRI Global reporting initiative HCH Hidrocarburo halogenado ISO International standardization organisation LCA Life cycle analysis MFA Material flow analysis MFCA Material flow cost analysis OLPC One laptop per child RSE Responsabilidad social empresarial
REFERENCIAS
Better Place 2012 httpwwwbetterplacecom Carlowitz Hans Carl von laquoSylvicultura oeconomica oder haurwirthliche Nachricht und
Naturmii r ige Anweisung zur wilden Baum-Zuchtraquo 1713 ecoinvent Swiss Centre for Life Cycle Inventories 201 2 httpwwwecoinventorg
168
GRI Global Reporting Index 2012 httpwwwgri org Hoffmann Volker y Matthias Kuss laquoTechnologiemanagement amp Nachhaltigkeit raquo
Universitat LOneburg CSM 2009 Hopfenbeck W y C Jasch laquoUmweltorientierte Produktpolitik Moderne Industrie
LandsbergLech raquo Oko-Design 1995 Lieber Andreas laquoIntroduccion a la gestion sostenible raquo CEGESTI 2010 Lozano Rodrigo laquoEnvisioning sustainability three-dimensionallyraquo Journal of Cleaner
Production 162008 1838-1846 Meadows D The Limits to Growth Second Edition Revised Signet ISBN 73-187907
1974 Michelsen Gerd laquoGrundlagen einer nachhaltigen Entwicklung raquo Universitat LOneburg
CSM sf OECD Measuring material flows and resource productivity Volume I The OECD
Guide 2008 http www oecd orgdataoecd464840485853pdf Porter Michael E y Claas van der Linde laquoGreen and Competitive Ending the
Stalemateraquo 1996 Prox Martina laquoConceptos y Herramientas practicas para la Gestion Sostenible
Empresarial Cuantitativa raquo s f Riezn ik Lamana Natal ia y Agustin Hernandez Aja Analisis del cicio de vida 2005
httphabitataq upmestemasa-anal isis-ciclo-vidahtml Royal Society People and the planet report 2012
httproyalsocietyorgpolicyprojectspeople-planetlreportl Schaltegger Stefan y Holger Petersen laquoEinfUhrung in des
Nachhaltigkeitsmanagement raquo Universitat UJneburg CSM 2008 Schmidt Mario laquoStoffstromanalysen in Okobilanzen und Oko-Aud its raquo 1995 Schmidt Mario laquoUmweltbilanzen zwischen Produkt- und Unternehmensbezug raquo 2008 Tecnol6gico de Monterrey Instituto Tecnol6gico y de Estudios Superiores de
Monterrey Mexico 2012 httpwwwitesmeduwpswcmconnectlitesmtecnologico+de+monterreycarreras+prof
esionalesareas+de+estudioingenieria+y+cienciasids Thi~en Nikolaus y Jan van Look laquoFrom Waste Air Treatment to Resource
Efficiencyraquo Chemie Ingenieur Technik 2011 1573- 1581 United Nations Report of the World Commission on Environment and Development
General Assembly Resolution 421187 1987 Wuppertal Institut Oko-Innovationen Faktor Vier Faktor Zehn und aktuelle Ansatze
2012 httpwwwwupperi nstorgprojektethemen_onlineoeko_innovationenindexhtml (ultimo acceso 03 de Abril de 2012)
169
9 OPTIMIZACION EN IMAGENES A COLOR UTILIZANDO INTERPOLACION CON FUNCIONES DE BASE RADIAL
[11Jaime Alberto Echeverri Arias [21Jorge Eliecer Rudas Castano
jaecheverriudemeduco jrudascasgmailcom
[11 Universidad de Medellin [21Universidad del Magdalena
RESUMEN
Este capitulo presenta un metodo para suprimir ruido impulsivo en imagenes a color utilizando interpolaci6n a traves de funciones de base radial Este es un problema clasico en multiples aplicaciones en diferentes areas su arigen radica en mecanismos de captaci6n de datos defectuosos que generan errores a interval os variados de tiempo en las senales de entrada
Se comparan los resultados obtenidos con el metodo propuesto frente a los algoritmos clasicos no lineales como el filtrado par la mediana la media y el de outlier En todos los escenarios probados los resultados fueron mas eficaces con el metodo propuesto EI algoritmo demostr6 ser robusto frente a grandes volumenes de ruido en el caso de prueba Los resultados fueron analizados a traves del error cuadrado medio (ECM) y Peak Signal to Noise Ratio (PSNR) que son dos metricas de uso comun para comparar la calidad entre dos imagenes luego de un proceso de restauraci6n Se alcanz6 un ECM de 14 y un PSNR de 358 db sobre la imagen de Lenna a 51 2x512 pixeles con un porcentaje de pixeles ruido del 40
Palabras clave Filtro no lineal de imagenes funciones de base radial interpolaci6n ruido impulsivo
91 INTRODUCCION
EI ruido en una imagen es cualquier degradaci6n sobre la senal origen producida por factores ex-ternos al sistema (Mcandrew 2004) En el procesamiento de imagenes el ruido se presenta como alteraciones de los valores de los pixeles que componen dicha imagen EI ruido puede producirse durante la captura la transmisi6n 0 el procesamiento de alguna senal La naturaleza del ruido (ruido gaussiano ruido impulsivo ruido uniforme ruido multiplicativo etc para ampliar vease (Mythili y Kavitha 2011 )) determina la estrategia para su supresi6n
Existen muchos algoritmos de comportamiento no lineal para la supresi6n del ruido impulsivo como el filtrado por la mediana y el de la media sin embargo estas tecnicas presentan desventajas como la modificaci6n de todos los pixeles de la imagen distorsionando aun pixeles no ruidosos
171
Hernandez Riveros Jesus Antonio Optim izaci6n de Conocimiento en tngenieria ISBN 978-958-76 1-433 -6 Centro de Publicaclones Unive rsid ad Nacional de Colombia Sede Medell in 2013
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176

GRI Global Reporting Index 2012 httpwwwgri org Hoffmann Volker y Matthias Kuss laquoTechnologiemanagement amp Nachhaltigkeit raquo
Universitat LOneburg CSM 2009 Hopfenbeck W y C Jasch laquoUmweltorientierte Produktpolitik Moderne Industrie
LandsbergLech raquo Oko-Design 1995 Lieber Andreas laquoIntroduccion a la gestion sostenible raquo CEGESTI 2010 Lozano Rodrigo laquoEnvisioning sustainability three-dimensionallyraquo Journal of Cleaner
Production 162008 1838-1846 Meadows D The Limits to Growth Second Edition Revised Signet ISBN 73-187907
1974 Michelsen Gerd laquoGrundlagen einer nachhaltigen Entwicklung raquo Universitat LOneburg
CSM sf OECD Measuring material flows and resource productivity Volume I The OECD
Guide 2008 http www oecd orgdataoecd464840485853pdf Porter Michael E y Claas van der Linde laquoGreen and Competitive Ending the
Stalemateraquo 1996 Prox Martina laquoConceptos y Herramientas practicas para la Gestion Sostenible
Empresarial Cuantitativa raquo s f Riezn ik Lamana Natal ia y Agustin Hernandez Aja Analisis del cicio de vida 2005
httphabitataq upmestemasa-anal isis-ciclo-vidahtml Royal Society People and the planet report 2012
httproyalsocietyorgpolicyprojectspeople-planetlreportl Schaltegger Stefan y Holger Petersen laquoEinfUhrung in des
Nachhaltigkeitsmanagement raquo Universitat UJneburg CSM 2008 Schmidt Mario laquoStoffstromanalysen in Okobilanzen und Oko-Aud its raquo 1995 Schmidt Mario laquoUmweltbilanzen zwischen Produkt- und Unternehmensbezug raquo 2008 Tecnol6gico de Monterrey Instituto Tecnol6gico y de Estudios Superiores de
Monterrey Mexico 2012 httpwwwitesmeduwpswcmconnectlitesmtecnologico+de+monterreycarreras+prof
esionalesareas+de+estudioingenieria+y+cienciasids Thi~en Nikolaus y Jan van Look laquoFrom Waste Air Treatment to Resource
Efficiencyraquo Chemie Ingenieur Technik 2011 1573- 1581 United Nations Report of the World Commission on Environment and Development
General Assembly Resolution 421187 1987 Wuppertal Institut Oko-Innovationen Faktor Vier Faktor Zehn und aktuelle Ansatze
2012 httpwwwwupperi nstorgprojektethemen_onlineoeko_innovationenindexhtml (ultimo acceso 03 de Abril de 2012)
169
9 OPTIMIZACION EN IMAGENES A COLOR UTILIZANDO INTERPOLACION CON FUNCIONES DE BASE RADIAL
[11Jaime Alberto Echeverri Arias [21Jorge Eliecer Rudas Castano
jaecheverriudemeduco jrudascasgmailcom
[11 Universidad de Medellin [21Universidad del Magdalena
RESUMEN
Este capitulo presenta un metodo para suprimir ruido impulsivo en imagenes a color utilizando interpolaci6n a traves de funciones de base radial Este es un problema clasico en multiples aplicaciones en diferentes areas su arigen radica en mecanismos de captaci6n de datos defectuosos que generan errores a interval os variados de tiempo en las senales de entrada
Se comparan los resultados obtenidos con el metodo propuesto frente a los algoritmos clasicos no lineales como el filtrado par la mediana la media y el de outlier En todos los escenarios probados los resultados fueron mas eficaces con el metodo propuesto EI algoritmo demostr6 ser robusto frente a grandes volumenes de ruido en el caso de prueba Los resultados fueron analizados a traves del error cuadrado medio (ECM) y Peak Signal to Noise Ratio (PSNR) que son dos metricas de uso comun para comparar la calidad entre dos imagenes luego de un proceso de restauraci6n Se alcanz6 un ECM de 14 y un PSNR de 358 db sobre la imagen de Lenna a 51 2x512 pixeles con un porcentaje de pixeles ruido del 40
Palabras clave Filtro no lineal de imagenes funciones de base radial interpolaci6n ruido impulsivo
91 INTRODUCCION
EI ruido en una imagen es cualquier degradaci6n sobre la senal origen producida por factores ex-ternos al sistema (Mcandrew 2004) En el procesamiento de imagenes el ruido se presenta como alteraciones de los valores de los pixeles que componen dicha imagen EI ruido puede producirse durante la captura la transmisi6n 0 el procesamiento de alguna senal La naturaleza del ruido (ruido gaussiano ruido impulsivo ruido uniforme ruido multiplicativo etc para ampliar vease (Mythili y Kavitha 2011 )) determina la estrategia para su supresi6n
Existen muchos algoritmos de comportamiento no lineal para la supresi6n del ruido impulsivo como el filtrado por la mediana y el de la media sin embargo estas tecnicas presentan desventajas como la modificaci6n de todos los pixeles de la imagen distorsionando aun pixeles no ruidosos
171
Hernandez Riveros Jesus Antonio Optim izaci6n de Conocimiento en tngenieria ISBN 978-958-76 1-433 -6 Centro de Publicaclones Unive rsid ad Nacional de Colombia Sede Medell in 2013
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176

9 OPTIMIZACION EN IMAGENES A COLOR UTILIZANDO INTERPOLACION CON FUNCIONES DE BASE RADIAL
[11Jaime Alberto Echeverri Arias [21Jorge Eliecer Rudas Castano
jaecheverriudemeduco jrudascasgmailcom
[11 Universidad de Medellin [21Universidad del Magdalena
RESUMEN
Este capitulo presenta un metodo para suprimir ruido impulsivo en imagenes a color utilizando interpolaci6n a traves de funciones de base radial Este es un problema clasico en multiples aplicaciones en diferentes areas su arigen radica en mecanismos de captaci6n de datos defectuosos que generan errores a interval os variados de tiempo en las senales de entrada
Se comparan los resultados obtenidos con el metodo propuesto frente a los algoritmos clasicos no lineales como el filtrado par la mediana la media y el de outlier En todos los escenarios probados los resultados fueron mas eficaces con el metodo propuesto EI algoritmo demostr6 ser robusto frente a grandes volumenes de ruido en el caso de prueba Los resultados fueron analizados a traves del error cuadrado medio (ECM) y Peak Signal to Noise Ratio (PSNR) que son dos metricas de uso comun para comparar la calidad entre dos imagenes luego de un proceso de restauraci6n Se alcanz6 un ECM de 14 y un PSNR de 358 db sobre la imagen de Lenna a 51 2x512 pixeles con un porcentaje de pixeles ruido del 40
Palabras clave Filtro no lineal de imagenes funciones de base radial interpolaci6n ruido impulsivo
91 INTRODUCCION
EI ruido en una imagen es cualquier degradaci6n sobre la senal origen producida por factores ex-ternos al sistema (Mcandrew 2004) En el procesamiento de imagenes el ruido se presenta como alteraciones de los valores de los pixeles que componen dicha imagen EI ruido puede producirse durante la captura la transmisi6n 0 el procesamiento de alguna senal La naturaleza del ruido (ruido gaussiano ruido impulsivo ruido uniforme ruido multiplicativo etc para ampliar vease (Mythili y Kavitha 2011 )) determina la estrategia para su supresi6n
Existen muchos algoritmos de comportamiento no lineal para la supresi6n del ruido impulsivo como el filtrado por la mediana y el de la media sin embargo estas tecnicas presentan desventajas como la modificaci6n de todos los pixeles de la imagen distorsionando aun pixeles no ruidosos
171
Hernandez Riveros Jesus Antonio Optim izaci6n de Conocimiento en tngenieria ISBN 978-958-76 1-433 -6 Centro de Publicaclones Unive rsid ad Nacional de Colombia Sede Medell in 2013
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176
Con la tecnica propuesta en este capitulo se obtiene una mejora significativa en el fil trado de las imagenes Este metodo solo altera el valor de los elementos ruidosos para 10 cual se utiliza interpolacion con funciones de base rad ial a partir de los valores de los pixeles no ruidosos pertenecientes al vecindario de dicho elemento Se defin io un criterio para determinar cuales son los pixeles ruidosos en las imagenes utilizando informacion derivada de las generalidades del vecindario de pixel ruidoso
92 ESTADO DEL ARTE
La eliminacion de ruido impulsivo es un procedimiento tipico en la mejora de imagenes digita-Ies Este objetivo se aborda en la literatura inicia lmente con la utilizacion de filtros de medias de las medianas filtrado en el domino de las frecuencias y con posterioridad con tecnicas mas robustas como los clasificadores y los interpola-dores
Los fiJtrados lineales y los no lineales son ampliamente abordados en la literatura como en (Rosenfeld y Kak 1982) (Pratt 1991) (Gonzalez y Woods sf) La eliminaci6n de ruido es un problema tipico del procesamiento digital de imagenes que ha ido evolucionando desde el campo de aplicacion hasta la funcionalidad y la eficacia Mientras que las tecnicas clasicas mencionadas para eliminar el ru ido se han mantenido han aparecldo tambien nuevas aproximaciones y estrategias para abordar el problema
Garcia et ai (Garcia y Ramirez 2003) propusieron resolver el problema del ruldo impulsivo en espectros estelares util izando redes neuronales wavelet (RNW) para 10 cual realizaron experimentos entrenando la red con casos diferentes de espectros con ruido tomandose como entrada tales espectros para la red neuronal wavelet donde se procesa y se compara la salida obtenida contra un referente sin ruido Posteriormente se prueba la red con espectros que no fueron proporcionados en el entrenamiento y se realiza el procesamiento para filtrar y comparar los datos con la salida deseada Los autores reportaron que la salida propuesta por la RNW es altamente aproximada a la salida deseada 10 que implica que sus resultados son satisfactorios
Melange T et al (Melange Nachtegael y Kerre 2011) utilizaron filtros difusos para detectar y eliminar ruido impulsivo en imagenes secuenciales a color derivadas de videos La aplicacion de un filtro en una sola etapa elimina una cantidad considerable de detalles es por esto que los autores optaron por aplicar paso por paso los fil tros basados en blockmaching alrededor del ruido y detectaron los pixeles ru idosos con ayuda de reg las difusas
Los autores reportaron que los niveles de ECM y PSNR alcanzados durante sus pruebas demuestran que el metodo propuesto es mejor que los trabajos referentes en la literatura
(Gomez y otros 2003) propusieron la utilizacion de maquinas de vectores de soporte para la eliminacion del ruido impulsivo usando tanto clasificacion como regresion Mediante el clasificador seleccionaron los pixeles de la imagen que son ruido y mediante la regresion obtuvieron un valor de re-construccion de dicho pixel usando los pixeles que Ie rodean Esta tecnica se puede apllcar con exito inclusive en imagenes con alta tasa de ruido mejorando significativamente la calidad de la imagen
172
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176
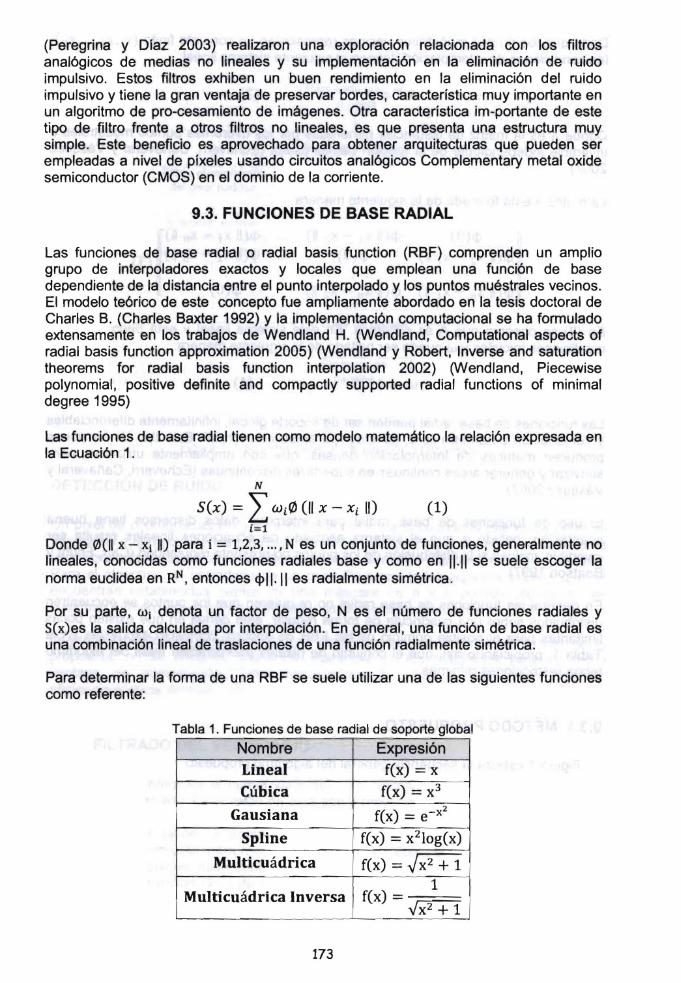
(Peregrina y Diaz 2003) realizaron una exploraci6n relacionada con los filtros anal6gicos de medias no lineales y su implementaci6n en la eliminaci6n de ruido impulsivo Estos filtros exhiben un buen rendimiento en la eliminaci6n del ruido impulsivo y tiene la gran ventaja de preservar bordes caracteristica muy importante en un algoritmo de pro-cesamiento de imagenes Otra caracteristicaim-portante de este tipo de filtro frente a otros filtros no lineales es que presenta una estructura muy simple Este beneficio es aprovechado para obtener arquitecturas que pueden ser empleadas a nivel de plxeles usando circuitos anal6gicos Complementary metal oxide semiconductor (CMOS) en el dominio de la corriente
93 FUNCIONES DE BASE RADIAL
Las funciones de base radial 0 radial basis function (RBF) comprenden un amplio grupo de interpoladores exactos y locales que emplean una funci6n de base dependiente de la distancia entre el punto interpolado y los puntos muestrales vecinos EI modelo te6rico de este concepto fue ampliamente abordado en la tesis doctoral de Charles B (Charles Baxter 1992) y la implementaci6n computacional se ha formulado extensamente en los trabajos de Wendland H (Wendland Computational aspects of radial basis function approximation 2005) (Wendland y Robert Inverse and saturation theorems for radial basis function interpolation 2002) (Wendland Piecewise polynomial positive definite and compactly supported radial functions of minimal degree 1995)
Las funciones de base radial tienen como modelo matematico la relaci6n expresada en la Ecuaci6n 1
N
Sex) =I w i 0 ( x - Xi II) (1) i=l
Donde 0(11 x - Xi II) para i = 123 N es un conjunto de funciones generalmente no lineales conocidas como funciones radiales base y como en 1111 se suele escoger la norma euclidea en RN entonces ltPIIII es radialmente simetrica
Por su parte Wi denota un factor de peso N es el numero de funciones radiales y S(x)es la salida calculada por interpolaci6n En general una funci6n de base radial es una combinaci6n lineal de traslaciones de una funci6n radialmente simetrica
Para determinar la forma de una RBF se suele utilizar una de las siguientes funciones como referente
Tabla 1 Funciones de base radial de so porte global
Nombre Expresion Lineal f(x) =x
Cubica f(x) =x3
Gausiana f(x) = e-x2
Spline f(x) = x2 Iog(x)
Multicuadrica f(x) = JX2 + 1
Multicuadrica Inversa f(x) = 1
vx2 + 1
173
Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176

Dado que los puntos muestrales veGinos representan un conjunto finito (X l X2 XN)
las condiciones de interpolaci6n definen el siguiente sistema lineal
Aw =y (2)
Donde A es la matriz de distancias generadas por los diferentes puntos muestrales e invertible independiente de la funci6n basica usada (Echeverri Canaveral y Vasquez 2007)
La matriz A esta forrnada de la siguiente manera
4gt (0) 4gt( 11 Xl - X2 II ) cent( II Xl - Xn II ) ] cjgt(11 X2 - Xl II cjgt(0) centCII ~2 - Xn II ) (3)
[ cjgt( 11 Xn - Xl II ) cent( II Xn - X2 II) cjgt(O)
En (3) se observa que A es simetrica En este sistema lineal y esta dado por unas condiciones iniciales y w puede ser hallado de la sigu iente manera
w = cent - ly (4)
Las funciones de base radia l pueden ser de soporte global infinitamente diferenciables y contener un para metro libre lIamado parametro de forma Este tipo de funciones producen matrices de interpolaci6n densas que son ampliamente utilizadas para suavizar y generar areas continuas en superficies discontinuas (Echeverri Canaveral y Vasquez 2007)
EI uso de funciones de base rad ial para interpolar datos dispersos tiene buena aceptaci6n debido a que el sistema asociado de ecuaciones lineales resulta ser invertible incluso si la distribuci6n de los puntos no presenta regularidad (Carr Fright y Beatson 1997)
En general las funciones de base radial no re-quieren que los puntos se encuentren distribuidos sobre una cuadricula de forma regular esto deriva en que existen pocas limitantes para el posible dominio de las FBR de soporte compacto expuestas en la Tabla 1 propiciando asi que el conjunto de pixeles interpolantes base del algoritmo tenga restricciones minimas
931 METODO PROPUESTO
La Figura 1 esboza la secuencia general del algoritmo propuesto
174
-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176

-- -----
t Para el canal 1 _ _____
I_RG 8 r I _ T _ -IPara cad a pixel en I1-4- -----el canal _
shyc - 5 --lt ~ un pixel ruido~
Filtrar el vecindario J I II del pixel ruidoso
-- __I __ I I Interpolar el pixelI ruidoso en funci6n a No ~vecindario filtrado
I I I
=~Pi~ I Fin bucle d~l-____----J
canales
r-shy1Unificar los cana~
Figura 1 Esquema general del algoritmo propuesto
DETECCION DE RUIDO
Un pixel de coordenadas P(i j) se considera como ruido cuando la diferencia entre su intensidad y la media de las intensidades de la mascara se encuentra por encima de un umbral alfa definido como la diferencia entre la media y la mediana de la ventana Para el algoritmo el vecindario de un pixel P(i j son todos aquelios pixeles que se encuentran establecidos dentro de una mascara de n x n pixeles (donde n es cualquier numero impar mayor que uno) y cuyo centro se encuentra en P(ij
Diversos tamanos de mascaras fueron probados durante la implementacion de la propuesta no se encontro diferencia sustancial en los resultados variando dicha ventana de comparacion Una mascara de 3x3 fu e la que mejor relaci6n eficienciaieficacia demostro durante las pruebas
932 FIL TRADO DEL VECINDARIO
Seria erroneo interpolar el nuevo valor del pixel ru idoso utilizando su vecindario sin antes haberlo fil trado La omision de esta etapa provocaria predicciones erroneas con el metodo debido a que su base interpol ante contendria posiblemente informacion ruidosa Por tal razon se implementa un fi ltrado de la misma naturaleza que el expuesto anteriormente para reducir el conjunto de valores base para la interpolacion eliminando los pixeles ruido dentro del vecindario Esto implicaria que para interpolar el pixel de la posicion (22) de la Figura 2(b) solo se utilizarian los valores de los pixeles en las posiciones (1 2) (21) (23) (31) (33) es decir el conjunto de valores 46 43 47 44 44 este filtrado se realiza con los mismo parametros utilizados en la
175
deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176

deteccion del pixel ruidoso Esto garantiza que el valor nuevo para el pixel ruidoso no estara afectado por el ru ido circundante como sucede con filtros no lineales como el de la media 0 el de la mediana
160 46 230
43 3 44
47 6 44
0) b)
Figura 2 Ejemplo de configuraci6n posible de pixeles ru idosos sobre una mascara de 3 x 3
933 INTERPOLACION DEL PiXEL RUIDO CON FUNCIONES DE BASE RADIAL
A cada pixel detectado como ruido Ie corresponde un conjunto U de n2 - p - 1 pixeles base para la interpolacion en una mascara de n x n siendo n un numero impar mayor que dos y p es el numero de pixeles ru idosos extras contenidos en la mascara Despues del filtrado inicia l este conjunto presenta las siguientes dos propiedades todos son vecinos del pixel objeto y ninguno es un ru ido La Figura 3 muestra el resultado antes y despues de interpolar el pixel ruido con base en sus vecinos correctos Es apreciable el cambio efectuado solamente sobre el pixel central que se detect6 como ruido Los otros dos pfxeles ruido que aparecen en la ventana se dejan intactos durante la iteraci6n en posteriores iteraciones seran detectados e interpolados utilizando los valores originales sobre la imagen
b)
Figura 3 Correcci6n de ruido (a) Ventana con ruido en el pixel central (b) ventana luego de la interpolaclon del pixel central
Se opto como forma base para la RBF la denominada como multicuadrica En trabajos posteriores intentaremos hacer un ana lisis comparativo entre los resultados alcanzados aqui y los que potencialmente podrian alcanzarse utilizando diversas fu nciones de base rad ial de soporte compacto
94 RESULTADOS
Se realizaron pruebas con el algoritmo propuesto y algunos metodos clasicos de filtrado no lineal como el de la media la mediana (Pratt 1991) (Gonzalez y Woods sJ ) y el outl ier (AnudeepGandam y Singh Sidhu 201 0) En todos los algoritmos probados el vecindario esta definido por una matriz cuadrada de 3x3 pfxeles se utilizo como imagen base para las pruebas la famosa imagen de Lenna (Fernandez sJ)
176