interpolación de funciones
TRANSCRIPT


*INTERPOLACIÓN DE FUNCIONES
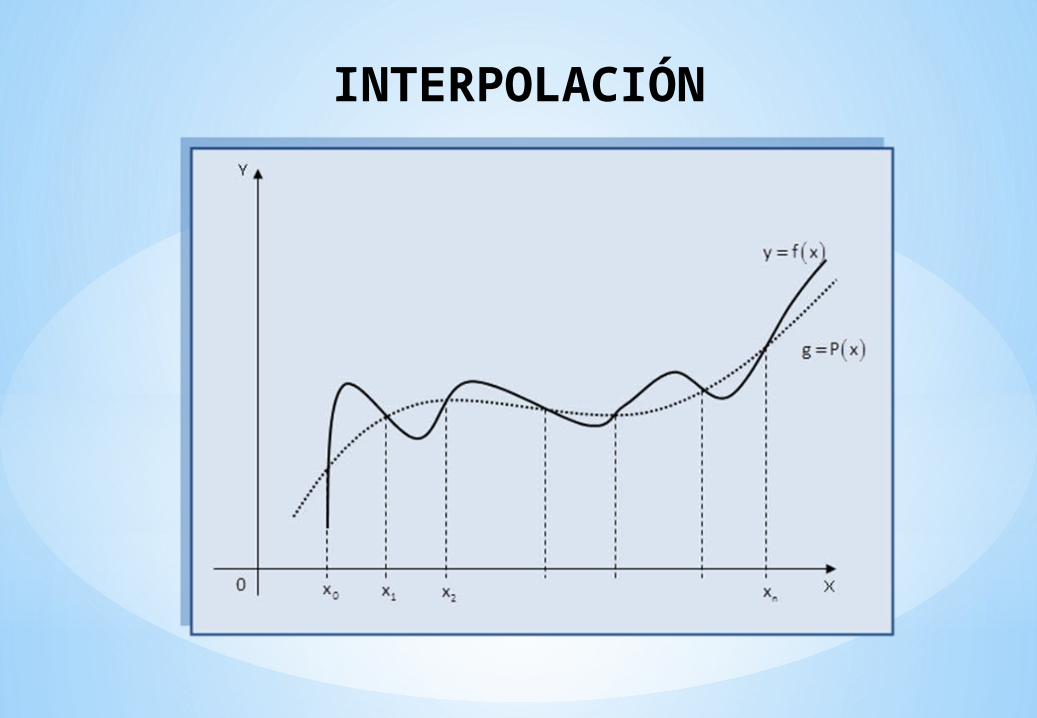
INTERPOLACIÓN
Es una herramienta fundamental para la derivación e integración numérica.
Obtener un algoritmo rápido, económico para calcular los valores de la función
a interpolar en aquellos puntos x, que no figuren en los datos.
Motivo principal:
Objetivo principal:
Técnica particular de sustitución de la función :
Consiste en construir una función F de gradon tal que en el intervalo cerrado a,b , en el que
viene prefijado el soporte de interpolación que se denota viene prefijado el soporte de interpolación que se denota
0 1 20 n
i nix a x x x ... x b ,
tome los mismos valores que la función a interpolar, es decir, que se verifique:tome los mismos valores que la función a interpolar, es decir, que se verifique:
i iF x f x i 0,1,2,...,n.
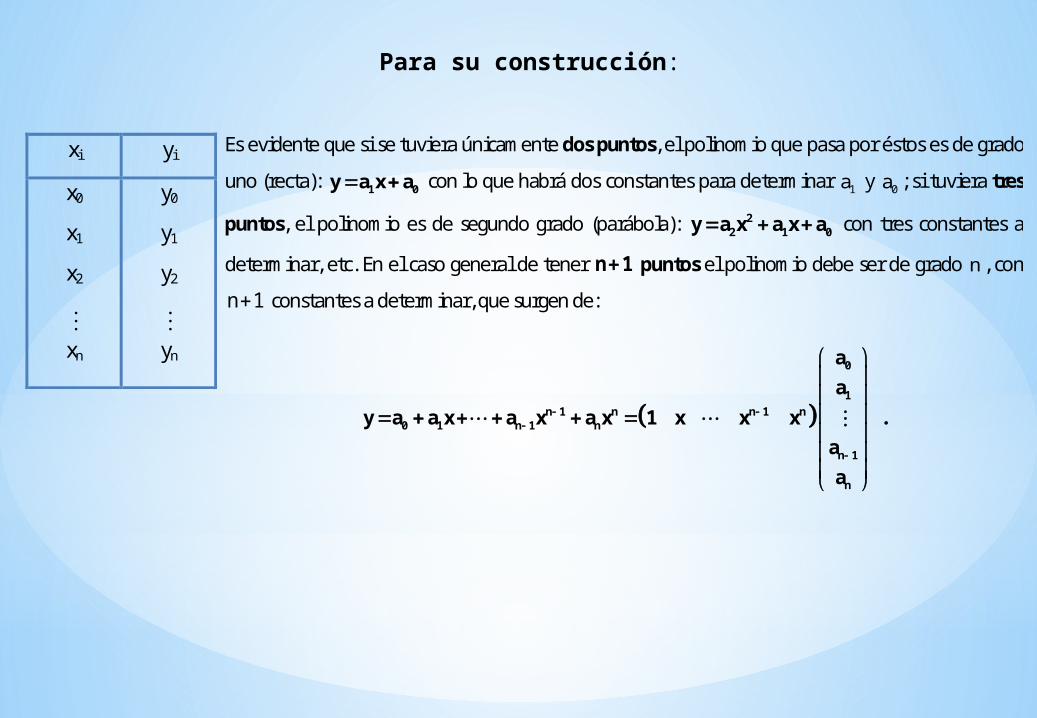
Para su construcción:
xi yi
x0
x1
x2
xn
y0
y1
y2
yn
Es evidente que si se tuviera únicamente dos puntos, el polinomio que pasa por éstos es de grado
uno (recta): 1 0y a x a con lo que habrá dos constantes para determinar 1a y 0a ; si tuviera tres
puntos, el polinomio es de segundo grado (parábola): 22 1 0y a x a x a con tres constantes a
determinar, etc. En el caso general de tener n 1 puntos el polinomio debe ser de grado n , con
n 1 constantes a determinar, que surgen de:
0
1n 1 n n 1 n
0 1 n 1 n
n 1
n
aa
y a a x a x a x 1 x x x .aa
Es evidente que si se tuviera únicamente dos puntos, el polinomio que pasa por éstos es de grado
uno (recta): 1 0y a x a con lo que habrá dos constantes para determinar 1a y 0a ; si tuviera tres
puntos, el polinomio es de segundo grado (parábola): 22 1 0y a x a x a con tres constantes a
determinar, etc. En el caso general de tener n 1 puntos el polinomio debe ser de grado n , con
n 1 constantes a determinar, que surgen de:
0
1n 1 n n 1 n
0 1 n 1 n
n 1
n
aa
y a a x a x a x 1 x x x .aa
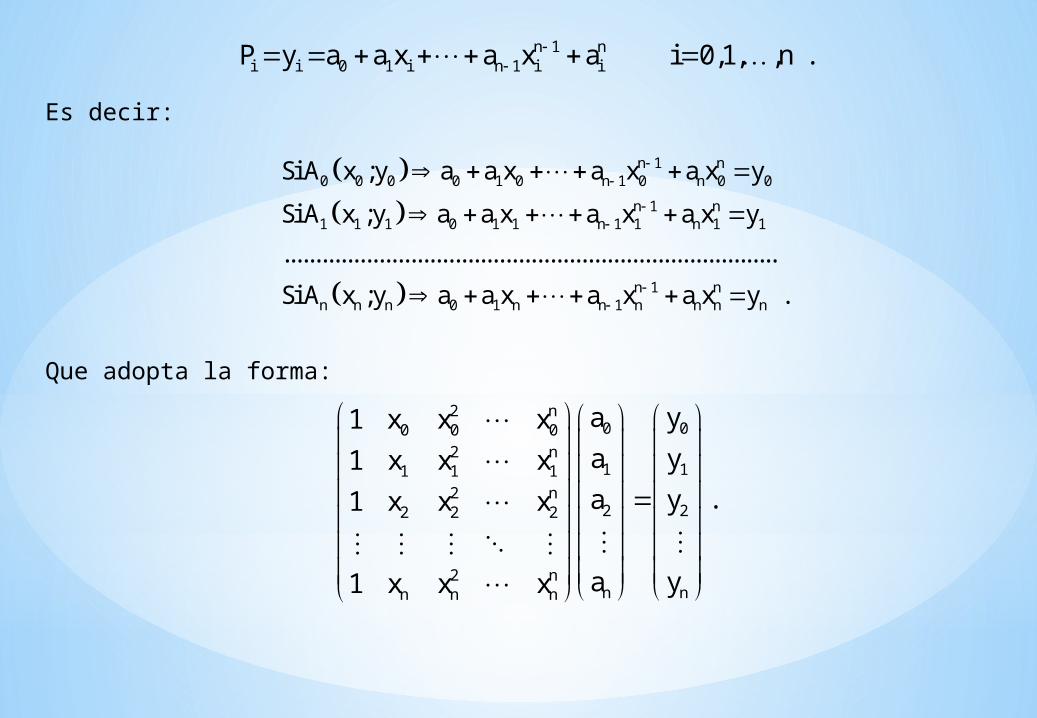
Para determinar las constantes resolvemos el siguiente sistema de ecuaciones lineales:
n 1 ni i 0 1 i n 1 i iP y a a x a x a i 0,1, ,n .
Es decir:
n 1 n0 0 0 0 1 0 n 1 0 n 0 0
n 1 n1 1 1 0 1 1 n 1 1 n 1 1
n 1 nn n n 0 1 n n 1 n n n n
Si A x ;y a a x a x a x y
Si A x ;y a a x a x a x y
..............................................................................
Si A x ;y a a x a x a x y .
Es decir:
Para determinar las constantes resolvemos el siguiente sistema de ecuaciones lineales:
n 1 ni i 0 1 i n 1 i iP y a a x a x a i 0,1, ,n .
Es decir:
n 1 n0 0 0 0 1 0 n 1 0 n 0 0
n 1 n1 1 1 0 1 1 n 1 1 n 1 1
n 1 nn n n 0 1 n n 1 n n n n
Si A x ;y a a x a x a x y
Si A x ;y a a x a x a x y
..............................................................................
Si A x ;y a a x a x a x y .
Que adopta la forma:Este sistema adopta la forma:
2 n0 00 0 0
2 n1 11 1 1
2 n2 22 2 2
2 nn nn n n
a y1 x x xa y1 x x xa y1 x x x
a y1 x x x
.
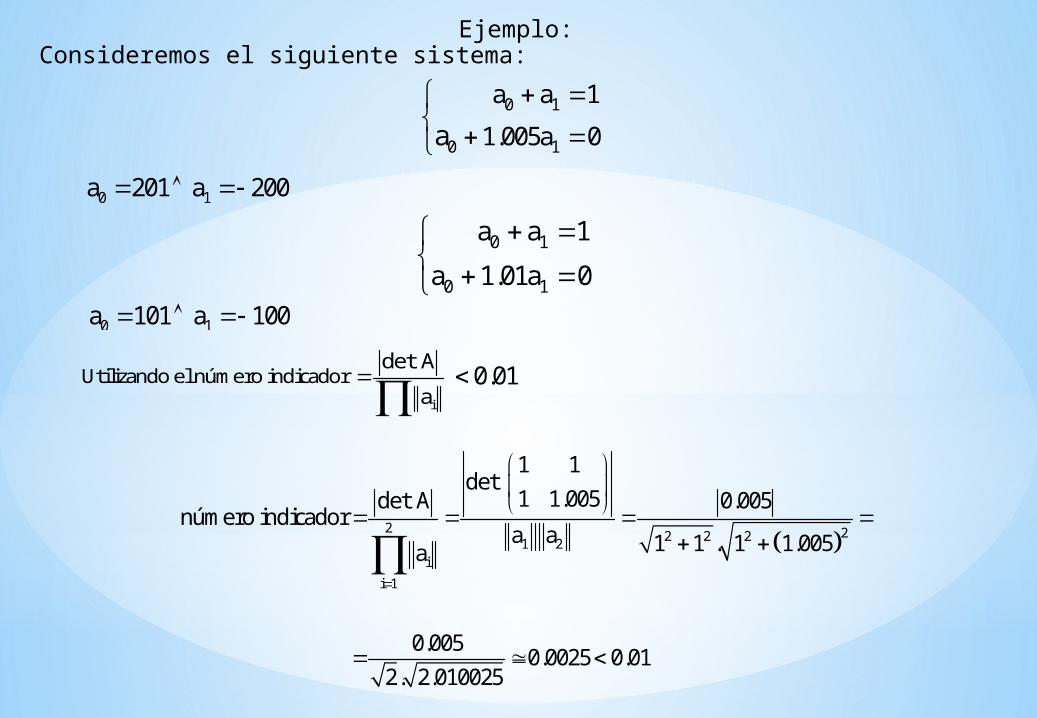
Consideremos el sistema 0 1
0 1
a a 1
1.005a 0a
Ejemplo:Consideremos el siguiente sistema:
solución del mismo es 0 1a 201 a 200 ;
obtenemos el sistema 0 1
0 1
a a 1
a 1.01a 0
tiene por solución 0 1a 101 a 100 . Si
0.01 sdsdfff Utilizando el número indicador i
det A
a
sistema está mal condicionado.
2 22 2 21 2
i
i 1
1 1det
1 1.005det A 0.005número indicador
a a 1 1 . 1 1.005a
0.0050.0025 0.01
2. 2.010025

Fórmulas
de Lagrange
Parabólica Progresiva
de Newton Ascendente
de Taylor
de Newton Descendente
Aproximación por Mínimos Cuadrados
* Si la función interpolante es un polinomio:
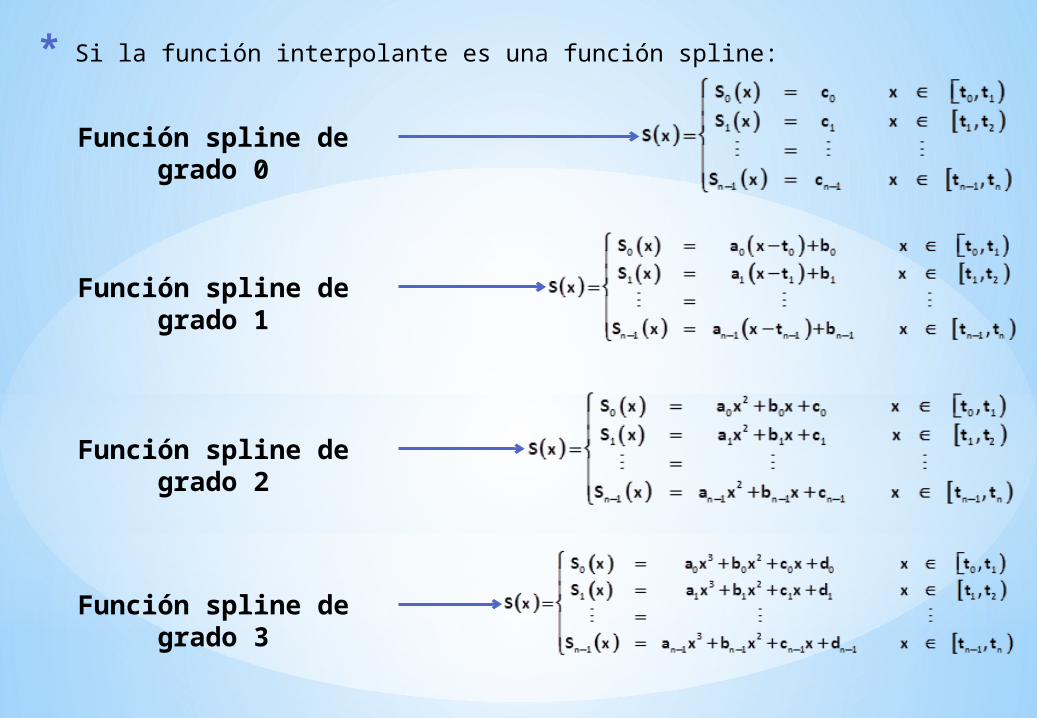
* Si la función interpolante es una función spline:
Función spline de grado 0
Función spline de grado 1
Función spline de grado 2
Función spline de grado 3
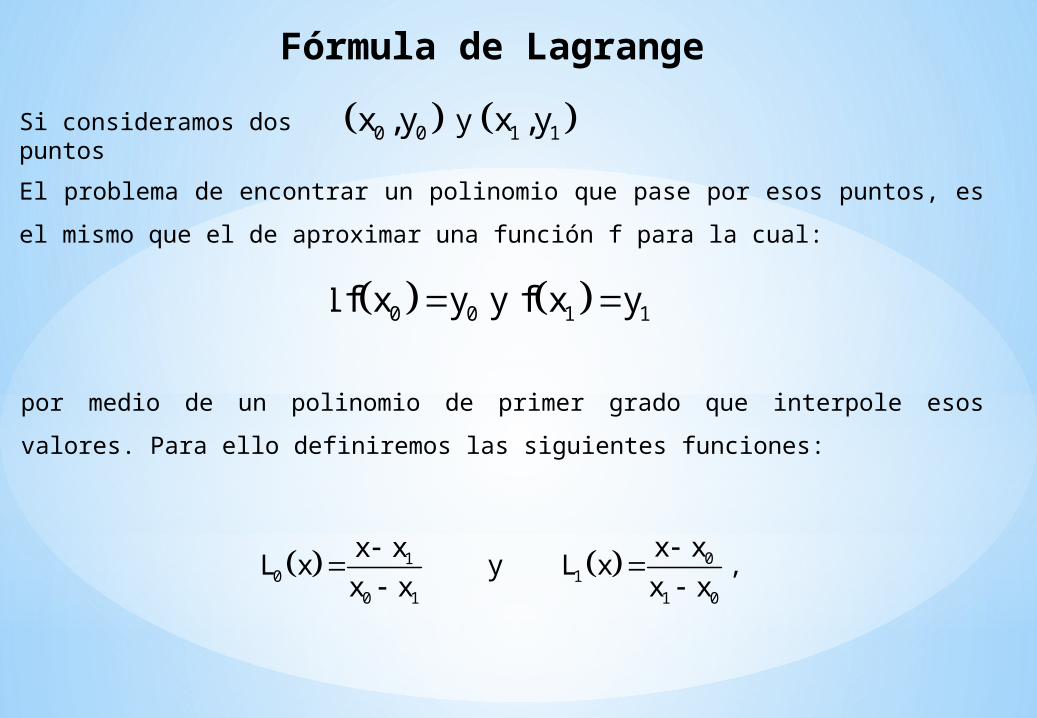
Fórmula de Lagrange
Si consideramos dos puntos 0 0x ,y y 1 1x ,y
la cual 0 0 1 1f x y y f x y
Para ello definiremos las funciones:
01
0 10 1 1 0
x xx xL x y L x
x x x x,
por medio de un polinomio de primer grado que interpole esos valores. Para
ello definiremos las siguientes funciones:
Si consideramos dos puntos
El problema de encontrar un polinomio que pase por esos puntos, es el mismo
que el de aproximar una función f para la cual:
Se define entonces:Se define entonces
0 0 1 1P x L x f x L x f x .
Como
0 0 0 1 1 0 1 1L x 1, L x 0, L x 0, y L x 1,
tenemos
0 0 1 0 0P x 1.f x 0.f x f x y
y
1 0 1 1 1P x 0.f x 1.f x f x y .
Si reemplazamos por en:
Como
0 0 0 1 1 0 1 1L x 1, L x 0, L x 0, y L x 1,
por lo tanto:tenemos
0 0 1 0 0P x 1.f x 0.f x f x y
y y
1 0 1 1 1P x 0.f x 1.f x f x y .
obtenemos:
Para ello definiremos las funciones:
01
0 10 1 1 0
x xx xL x y L x
x x x x,
dos 0 1x y x
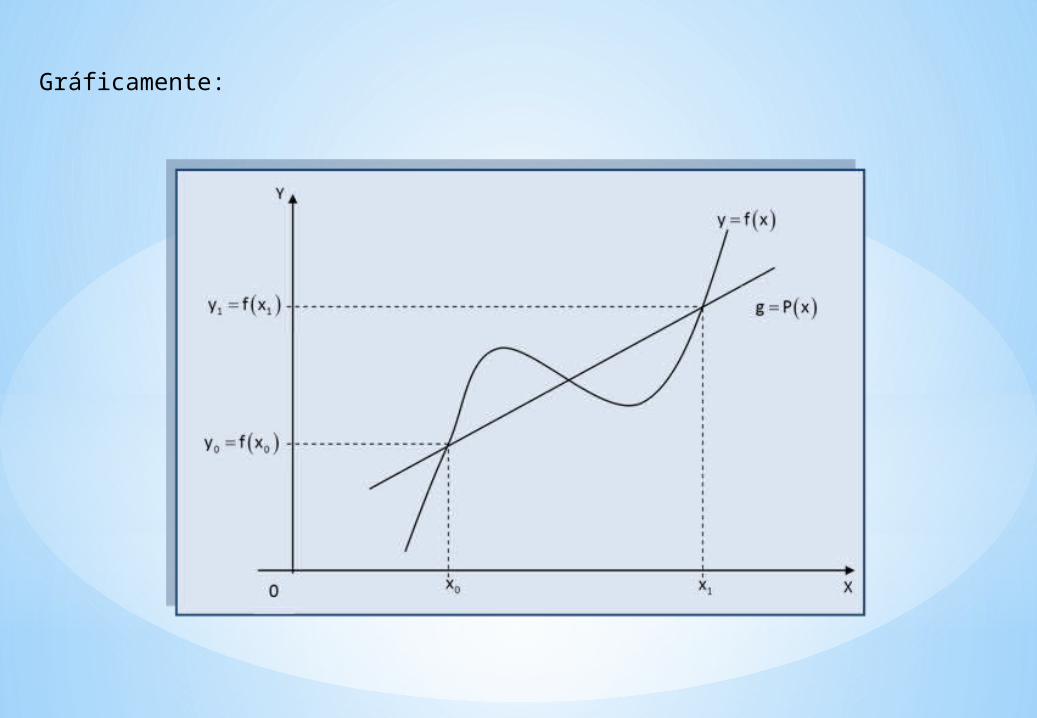
Gráficamente:
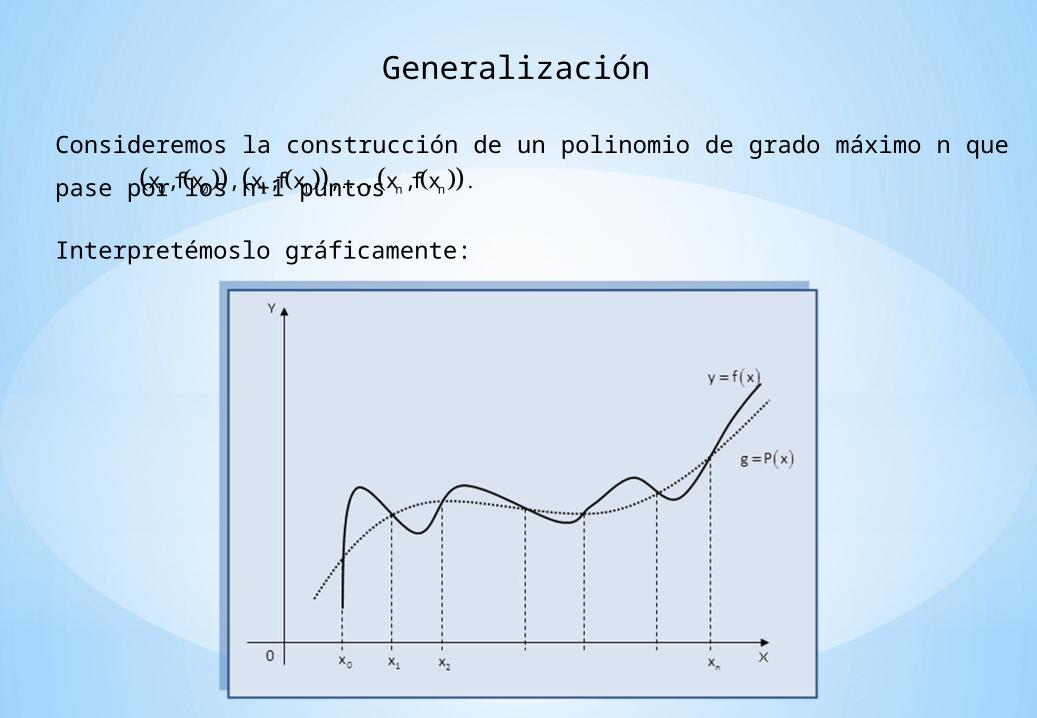
Generalización
Consideremos la construcción de un polinomio de grado máximo n que pase
por los n+1 puntos
A fin de generalizar el concepto de interpolación lineal, consideremos la construcción de un
polinomio de grado máximo n que pase por los n 1 puntos
0 0 1 1 n nx ,f x , x ,f x , , x ,f x .
Interpretémoslo gráficamente:
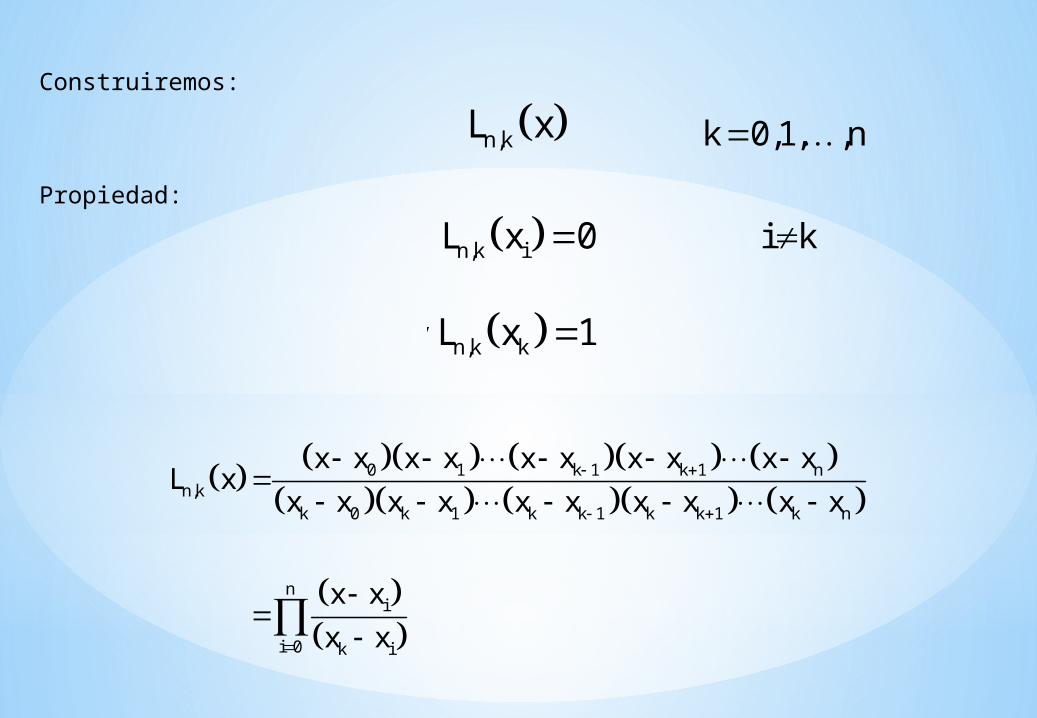
Construiremos:
una función n,kL x cada k 0,1, ,n
Propiedad:
d de que n,k iL x 0 , cu cuando i k y
i k y n,k kL x 1 se evalúe en kx x . Es decir,
0 1 k 1 k 1 nn,k
k 0 k 1 k k 1 k k 1 k n
ni
i 0 k i
x x x x x x x x x xL x
x x x x x x x x x x
x xx x
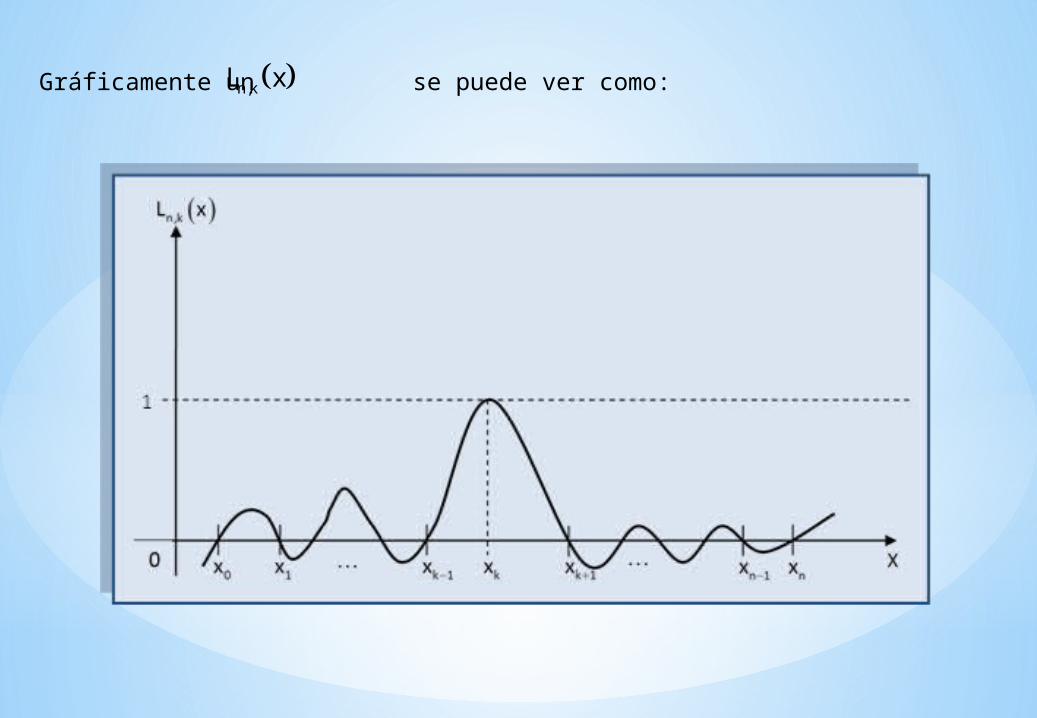
Gráficamente un se puede ver como:una función n,kL x
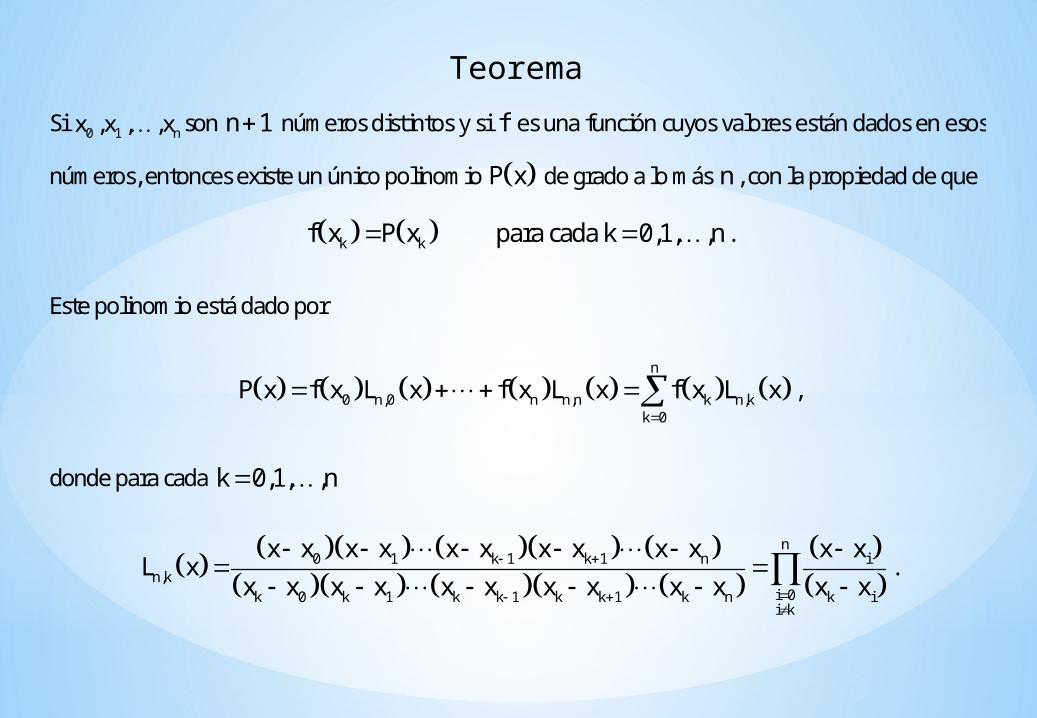
Teorema
Si 0 1 nx ,x , ,x son n 1 números distintos y si f es una función cuyos valores están dados en esos
números, entonces existe un único polinomio P x de grado a lo más n , con la propiedad de que
k kf x P x para cada k 0,1, ,n .
Este polinomio está dado por
n
0 n,0 n n,n k n,kk 0
P x f x L x f x L x f x L x
,
donde para cada k 0,1, ,n
n0 1 k 1 k 1 n i
n,ki 0k 0 k 1 k k 1 k k 1 k n k ii k
x x x x x x x x x x x xL x
x x x x x x x x x x x x
.
Si 0 1 nx ,x , ,x son n 1 números distintos y si f es una función cuyos valores están dados en esos
números, entonces existe un único polinomio P x de grado a lo más n , con la propiedad de que
k kf x P x para cada k 0,1, ,n .
Este polinomio está dado por
n
0 n,0 n n,n k n,kk 0
P x f x L x f x L x f x L x
,
donde para cada k 0,1, ,n
n0 1 k 1 k 1 n i
n,ki 0k 0 k 1 k k 1 k k 1 k n k ii k
x x x x x x x x x x x xL x
x x x x x x x x x x x x
.
Si 0 1 nx ,x , ,x son n 1 números distintos y si f es una función cuyos valores están dados en esos
números, entonces existe un único polinomio P x de grado a lo más n , con la propiedad de que
k kf x P x para cada k 0,1, ,n .
Este polinomio está dado por
n
0 n,0 n n,n k n,kk 0
P x f x L x f x L x f x L x
,
donde para cada k 0,1, ,n
n0 1 k 1 k 1 n i
n,ki 0k 0 k 1 k k 1 k k 1 k n k ii k
x x x x x x x x x x x xL x
x x x x x x x x x x x x
.
Si 0 1 nx ,x , ,x son n 1 números distintos y si f es una función cuyos valores están dados en esos
números, entonces existe un único polinomio P x de grado a lo más n , con la propiedad de que
k kf x P x para cada k 0,1, ,n .
Este polinomio está dado por
n
0 n,0 n n,n k n,kk 0
P x f x L x f x L x f x L x
,
donde para cada k 0,1, ,n
n0 1 k 1 k 1 n i
n,ki 0k 0 k 1 k k 1 k k 1 k n k ii k
x x x x x x x x x x x xL x
x x x x x x x x x x x x
.
Si 0 1 nx ,x , ,x son n 1 números distintos y si f es una función cuyos valores están dados en esos
números, entonces existe un único polinomio P x de grado a lo más n , con la propiedad de que
k kf x P x para cada k 0,1, ,n .
Este polinomio está dado por
n
0 n,0 n n,n k n,kk 0
P x f x L x f x L x f x L x
,
donde para cada k 0,1, ,n
n0 1 k 1 k 1 n i
n,ki 0k 0 k 1 k k 1 k k 1 k n k ii k
x x x x x x x x x x x xL x
x x x x x x x x x x x x
.
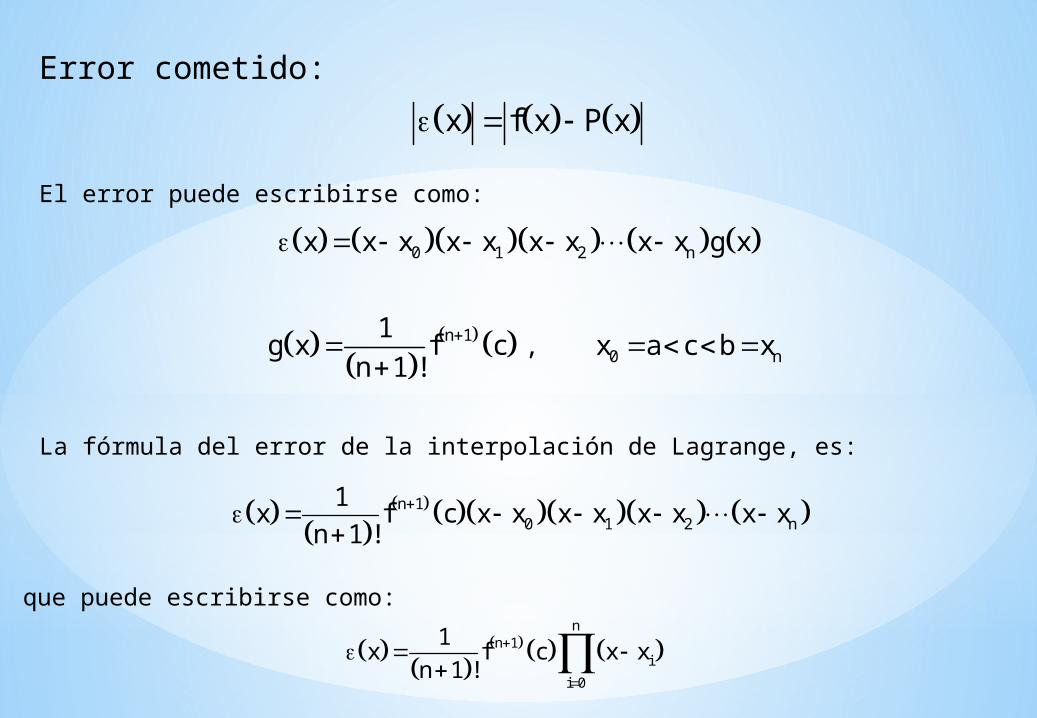
Error cometido:como
x f x P x .
escribir el error de la siguiente manera:
0 1 2 nx x x x x x x x x g x .
El error puede escribirse como:
Es posible demostrar que para 0 nx x ;x , g x está dada por
n 11
g x f cn 1 !
, 0 nx a c b x
La fórmula del error de la interpolación de Lagrange, es:el error de la interpolación de Lagrange, es:
n 1
0 1 2 n1
x f c x x x x x x x x .n 1 !
que puede escribirse como:Que se puede escribir:
nn 1
i
i 0
1x f c x x
n 1 !
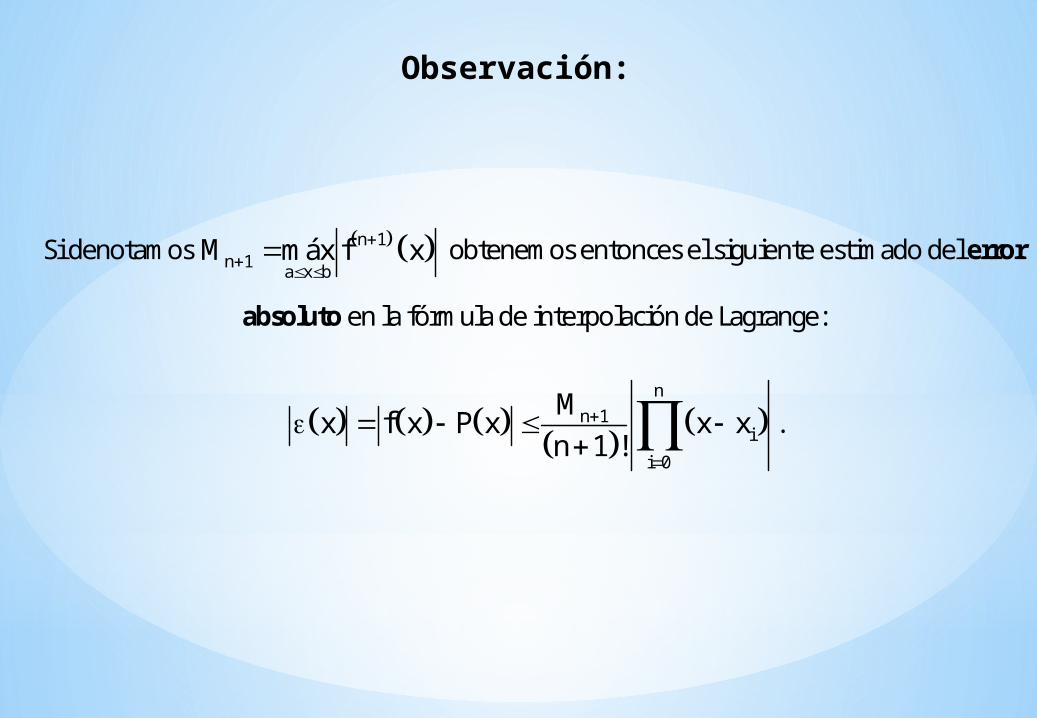
Si denotamos n 1n 1 a x b
M máx f x obtenemos entonces el siguiente estimado del error
absoluto en la fórmula de interpolación de Lagrange:
n
n 1i
i 0
Mx f x P x x x
n 1 !
.
Si denotamos n 1n 1 a x b
M máx f x obtenemos entonces el siguiente estimado del error
absoluto en la fórmula de interpolación de Lagrange:
n
n 1i
i 0
Mx f x P x x x
n 1 !
.
Observación:
Ejemplo:
una cota del error absoluto en el intervalo 0 nx ,x .
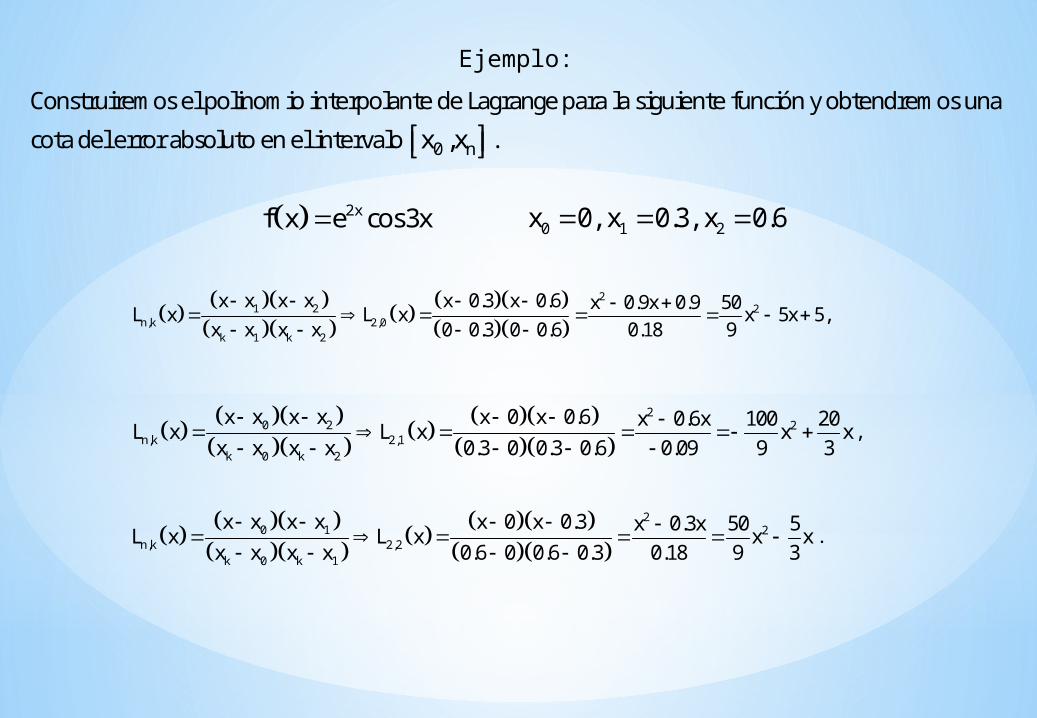
2xf x e cos3x
0 1 2x 0, x 0.3, x 0.6, n 2 .
Determinando los coeficientes polinómicos 0 1 2L x , L x y L x :
Construiremos el polinomio interpolante de Lagrange para la siguiente función y obtendremos una
cota del error absoluto en el intervalo 0 nx ,x .
Determinando los coeficientes polinómicos 0 1 2L x , L x y L x :
2
1 2 2n,k 2,0
k 1 k 2
x x x x x 0.3 x 0.6 x 0.9x 0.9 50L x L x x 5x 5
x x x x 0 0.3 0 0.6 0.18 9
2
0 2 2n,k 2,1
k 0 k 2
x x x x x 0 x 0.6 x 0.6x 100 20L x L x x x
x x x x 0.3 0 0.3 0.6 0.09 9 3
,
2
0 1 2n,k 2,2
k 0 k 1
x x x x x 0 x 0.3 x 0.3x 50 5L x L x x x
x x x x 0.6 0 0.6 0.3 0.18 9 3
.
Determinando los coeficientes polinómicos 0 1 2L x , L x y L x :
2
1 2 2n,k 2,0
k 1 k 2
x x x x x 0.3 x 0.6 x 0.9x 0.9 50L x L x x 5x 5
x x x x 0 0.3 0 0.6 0.18 9
2
0 2 2n,k 2,1
k 0 k 2
x x x x x 0 x 0.6 x 0.6x 100 20L x L x x x
x x x x 0.3 0 0.3 0.6 0.09 9 3
,
2
0 1 2n,k 2,2
k 0 k 1
x x x x x 0 x 0.3 x 0.3x 50 5L x L x x x
x x x x 0.6 0 0.6 0.3 0.18 9 3
.
Determinando los coeficientes polinómicos 0 1 2L x , L x y L x :
2
1 2 2n,k 2,0
k 1 k 2
x x x x x 0.3 x 0.6 x 0.9x 0.9 50L x L x x 5x 5,
x x x x 0 0.3 0 0.6 0.18 9
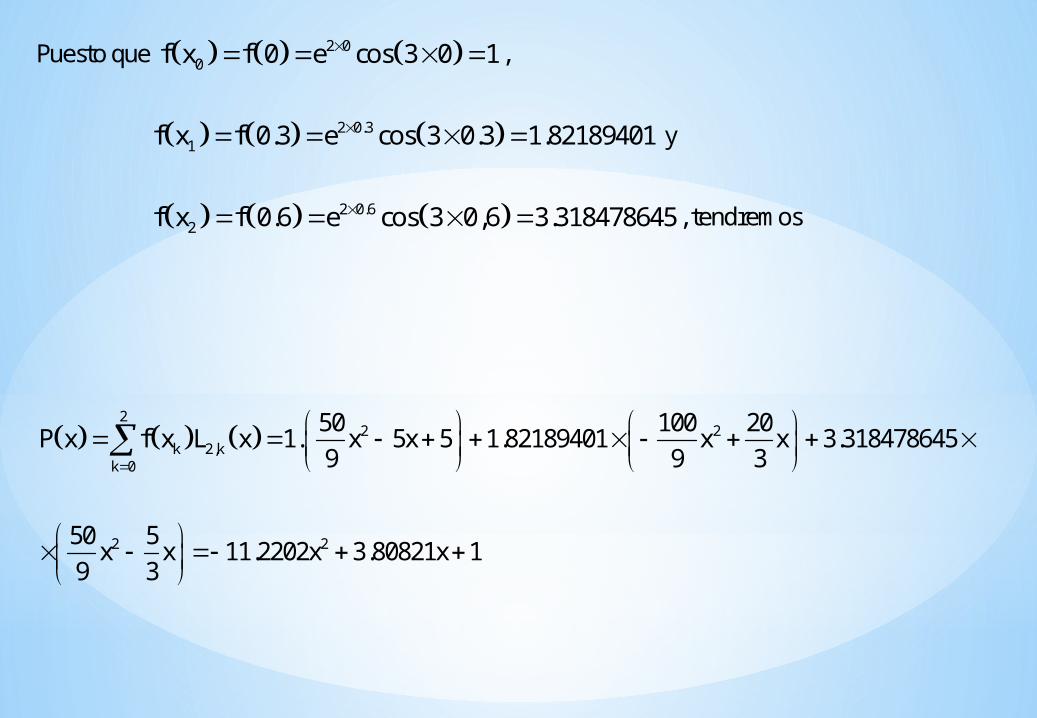
Puesto que 2 00f x f 0 e cos 3 0 1 ,
2 0.31f x f 0.3 e cos 3 0.3 1.82189401 y
2 0.62f x f 0.6 e cos 3 0,6 3.318478645 , tendremos
Puesto que 2 00f x f 0 e cos 3 0 1 ,
2 0.31f x f 0.3 e cos 3 0.3 1.82189401 y
2 0.62f x f 0.6 e cos 3 0,6 3.318478645 , tendremos
2
2 2k 2,k
k 0
2 2
50 100 20P x f x L x 1. x 5x 5 1.82189401 x x 3.318478645
9 9 3
50 5x x 11.2202x 3.80821x 1
9 3
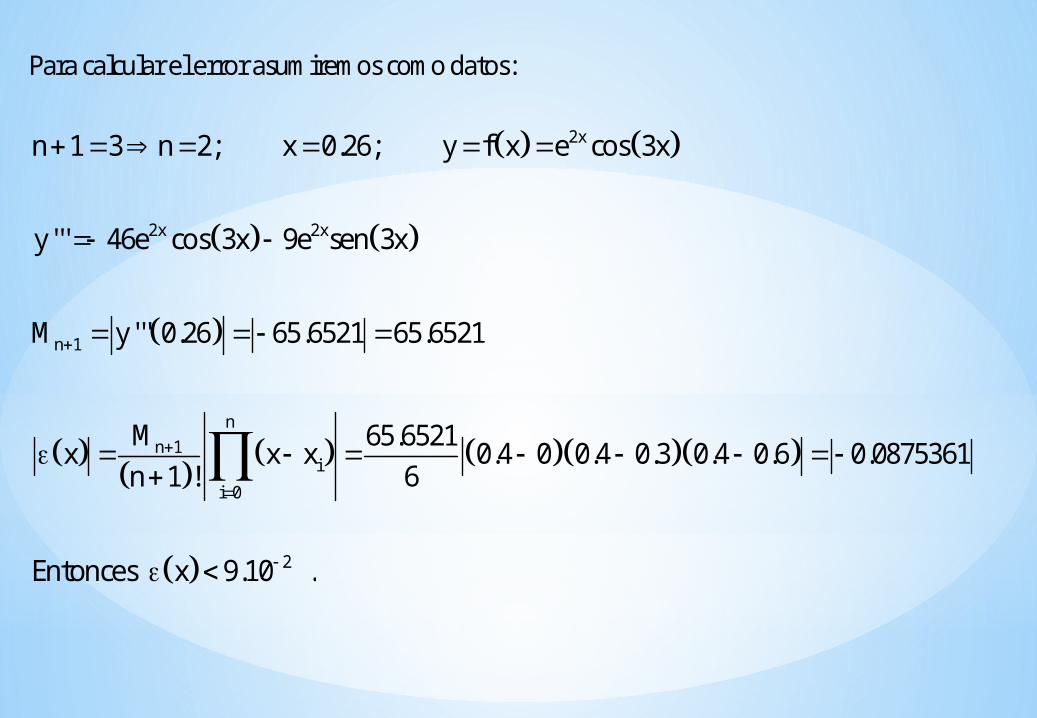
Para calcular el error asumiremos como datos:
2x 2x
n 1
2x
nn 1
i
i 0
46e cos 3x 9e sen 3x
M y''' 0.26 65
n 1 3 n 2; x 0.26; y f x e cos 3x
y'''
Mx x x 0.4 0 0.4 0.3 0.4 0.6 0.0875361
n 1
.6521 65.6521
65.6!
1652
2Entonces x 9.10 .
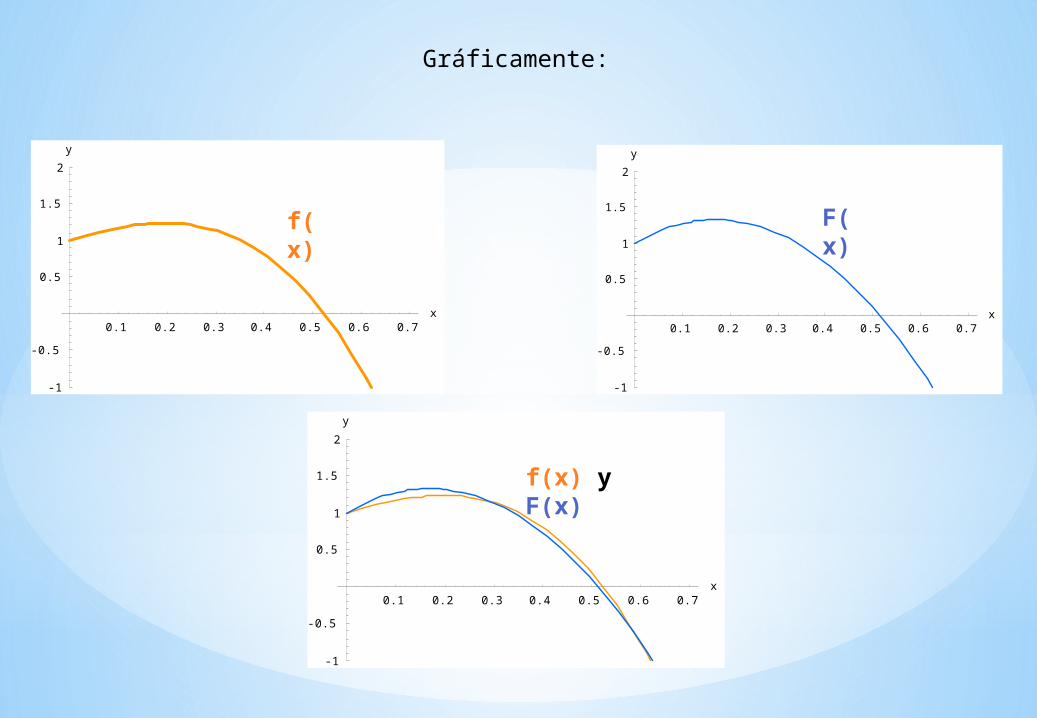
Gráficamente:
0.1 0.2 0.3 0.4 0.5 0.6 0.7x
-1
-0.5
0.5
1
1.5
2y
0.1 0.2 0.3 0.4 0.5 0.6 0.7x
-1
-0.5
0.5
1
1.5
2y
0.1 0.2 0.3 0.4 0.5 0.6 0.7x
-1
-0.5
0.5
1
1.5
2y
f(x) F(x)
f(x) y F(x)
