instru y medicion
DESCRIPTION
IngenieriaTRANSCRIPT

ANTECEDENTES
Fundamento de las Galgas extensiométricas: Efecto piezoeléctrico
Las galgas extensiométricas se basan en la variación de la resistencia de un conductor o un
semiconductor cuando es sometido a un esfuerzo mecánico. Este efecto fue descubierto por
Lord Kelvin en 1856. Si se considera un hilo metálico de longitud l, sección A y
resistividad?, su resistencia eléctrica R es:
Si se le somete a un esfuerzo en dirección longitudinal, cada una de las tres magnitudes que
intervienen en el valor de R experimenta un cambio y, por lo tanto, R también cambia de la
forma:
El cambio de longitud que resulta de aplicar una fuerza F a una pieza unidimensional,
siempre y cuando no se entre en la zona de fluencia (Figura 1), viene dado por la ley de
Hooke,
Donde E es una constante del material, denominada módulo de Young, s es la tensión
mecánica y he es la deformación unitaria. El es a dimensional, pero para mayor claridad se
suele dar en “micro deformaciones” (1 micro deformación = 1μe = 10-6 m/m).

Si se considera ahora una pieza que además de la longitud l tenga una dimensión
transversal t, resulta que como consecuencia de aplicar un esfuerzo longitudinal no sólo
cambia l sino también lo hace t. La relación entre ambos cambios viene dada por la ley de
Polisón, de la forma:
Donde μ es el denominado coeficiente de Poisson. Su valor está entre 0 y 0.5, siendo, por
ejemplo, de 0.17 para la fundición maleable, de 0.303 para el acero y de 0.33 para el
aluminio y el cobre. Obsérvese que para que se conservara constante el volumen debería ser
μ = 0.5. [1].
Diagrama a bloques
Diagrama de bloques del circuito:

Diagrama Esquemático
Puente de Wheatstone

Cuando se utiliza un elemento resistivo con poca variación, los cambios de voltaje de un
simple divisor de voltaje son mínimos e incluso pueden confundirse con variaciones de la
fuente de alimentación (ruido); en estos casos se hace necesaria la utilización de un circuito
llamado puente de Wheatstone, el cual se muestra en la Figura 5. Según la Figura 5(b) En
una de las ramas se coloca el elemento sensor resistivo que en nuestro caso es la galga
extensiométrica, se ajusta el potenciómetro de manera que en estado de reposo de la galga
el voltaje en “a” sea exactamente la mitad de Vcc, la otra rama debe de ser un divisor de
voltaje en donde Vb sea también exactamente la mitad de Vcc; el voltaje de interés se toma
de los puntos “a” y “b” que en estado de reposo de la galga será 0 V, cuando varía la
resistencia de ésta, se presenta entonces un voltaje Vab mayor o menor a cero según si
aumenta o disminuye la resistencia respectivamente, y debido sólo a la variación de la
misma, este circuito permite pues inmunidad ante los cambios (ruido) en la fuente de
alimentación y una mayor sensibilidad que se refleja en un mejor control de la información
proveniente del sensor.
En la Figura 5 (a), la resistencia R3 representa al transductor, y sufre una desviación según
un parámetro d, si R1 = R4 = R2, entonces:

La desviación se causa por la respuesta del transductor que se modifican con la señal de
entrada.
El voltaje de salida Vab es una medida de la desviación d. La tensión Vab es un voltaje de
circuito abierto, entonces [5]:
Búffers de voltaje y Amplificador restador
Para no provocar caídas indeseadas de voltaje ni extraer corriente del puente de Wheatstone
se emplea un operacional en configuración de seguidor de voltaje, la alta impedancia de
entrada de éstos permite extraer la información del voltaje sin influir en el comportamiento
del puente. Las señales del voltaje Va y el voltaje Vb entran entonces en un amplificador
restador con una ganancia máxima de voltaje de 100 (ajustable). El voltaje del amplificador
restador está determinado por la siguiente ecuación:
En el diagrama eléctrico (Figura 3) se observan los elementos de la ecuación (1.7):
Ri = 10Kohm y Rf es un potenciómetro de 1MOhm que ajusta la ganancia del amplificador
restador [2].
DESCRIPCIÓN DETALLADA DE FUNCIONAMIENTO

La balanza está compuesta por elementos que permiten la detección y visualización del
peso. El diseño del equipo puede resumirse en el diagrama de bloques de la figura.
El sensor de peso de la balanza es la celda de carga, una de las más económicas, tener
diseño compacto, buena linealidad y ser de simple colocación en la estructura.
Esquemáticamente se tiene
La señal de la galga en la celda se acondiciona con un amplificador de instrumentación y
posteriormente se digitaliza en el microcontrolador.

Celda de carga.
La celda de carga, como sensor de peso, constituye la parte fundamental de la balanza. Se
escogió una celda tipo single point o punto único, en la cual la presión se ejerce sobre un
punto específico de su estructura, característica que debe considerarse para la fijación de la
celda en la carcasa de la balanza y para la colocación de la bandeja de pesaje.
Especificaciones Técnicas de la Celda de Carga
PARAMETRO UNIDAD VALOR
Capacidad KG 40
Sensitividad mV/V 2
Tamaño Máximo de la
plataforma
cm 35 x 35
Límite de Carga % Cap. 150
Límite de Ruptura % Cap. 300
Excitación Nominal V 10
Excitación Máxima V 15
Impedancia de Entrada Ohm 415 + 15
Impedancia de Salida Ohm 350 + 3
Tipo de Circuito de
Compensación
Puente Balanceado
Largo del Cable Metros 0.5
Códico de Color +excitación = verde, +señal = rojo
-excitación = negro, -señal =
blanco
Construcción Aluminio

Estos datos pueden ser interpretados de la siguiente forma:
La capacidad es el peso máximo al que se puede someter a la celda e incluye el peso
muerto, el peso neto máximo y la tolerancia.
Capacidad = Peso Muerto + Peso Neto Max.+ Tolerancia
La plataforma de pesaje y su soporte forman parte del peso muerto.
La sensitividad indica el voltaje que entrega el circuito de la galga por cada voltio de
excitación, cuando está sometida al peso máximo. La alimentación de 5 voltios está
en el rango dado por el fabricante y puede usarse para la energización del resto de los
circuitos de la balanza.
Señal Max.= Sensitividad ×Voltaje Excitación
El tamaño máximo de la plataforma se especifica en 35x35mm, este no debe
sobrepasarse ya que puede desequilibrar la medición dando resultados erróneos y
dañando al sensor.
Los límites de carga y de ruptura obedecen al comportamiento de la celda misma, y
para este caso indican los siguientes valores:
MICROCONTROLADOR PIC 16F877
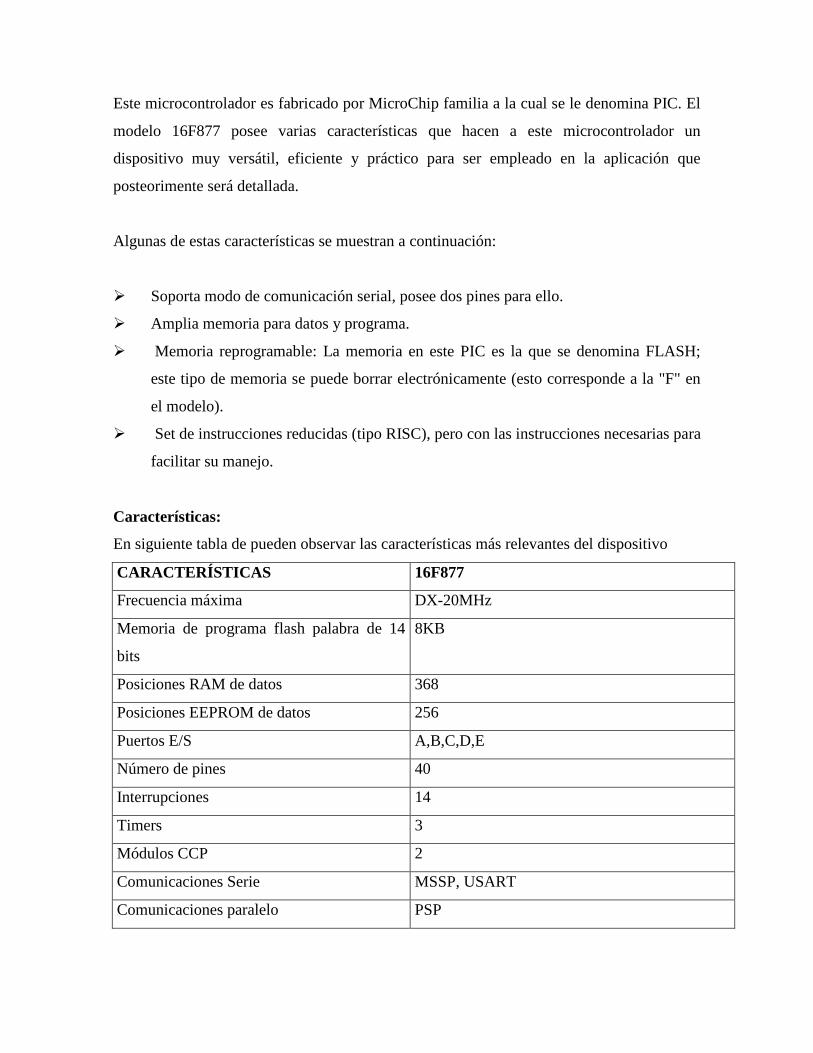
Este microcontrolador es fabricado por MicroChip familia a la cual se le denomina PIC. El
modelo 16F877 posee varias características que hacen a este microcontrolador un
dispositivo muy versátil, eficiente y práctico para ser empleado en la aplicación que
posteorimente será detallada.
Algunas de estas características se muestran a continuación:
Soporta modo de comunicación serial, posee dos pines para ello.
Amplia memoria para datos y programa.
Memoria reprogramable: La memoria en este PIC es la que se denomina FLASH;
este tipo de memoria se puede borrar electrónicamente (esto corresponde a la "F" en
el modelo).
Set de instrucciones reducidas (tipo RISC), pero con las instrucciones necesarias para
facilitar su manejo.
Características:
En siguiente tabla de pueden observar las características más relevantes del dispositivo
CARACTERÍSTICAS 16F877
Frecuencia máxima DX-20MHz
Memoria de programa flash palabra de 14
bits
8KB
Posiciones RAM de datos 368
Posiciones EEPROM de datos 256
Puertos E/S A,B,C,D,E
Número de pines 40
Interrupciones 14
Timers 3
Módulos CCP 2
Comunicaciones Serie MSSP, USART
Comunicaciones paralelo PSP

Líneas de entrada de CAD de 10 bits 8
Juego de instrucciones 35 Instrucciones
Longitud de la instrucción 14 bits
Arquitectura Harvard
CPU Risc
Canales Pwm 2
Diagrama de Pines
Conversor A/D.
Los microcontroladores de las familias PIC16F87x y PIC18Fxxx de los cuales estaremos
hablando a continuación, poseen un convertidor Analógico-Digital que convierte una señal
analógica en un número de 8 o 10 bits, según sea la configuración elegida por el diseñador.
Los microcontroladores de 40 pines como el PIC16F877, se puede observar que poseen 8
canales para conversión A/D, identificadas por las siglas AN(n), las cuales se encuentran

distribuidas entre el puerto A y el puerto E, como se muestra en el diagrama de pines de la
figura:
En el microcontrolador PIC16F877, cada canal de conversión A/D está conectado a un pin
ubicado en el puerto “A” y en el puerto “E”. Por ejemplo, el canal AN0 corresponde al pin
# 2 del microcontrolador, o expresado de otra manera, al pin RA0 del puerto A. El canal
AN1 corresponde al pin # 3; el canal AN2 corresponde al pin # 4 y así sucesivamente;
entonces se puede ver claramente que el puerto A cuenta con cinco de los ocho canales del
conversor A/D, y los otros tres canales están ubicados en los pines correspondientes al
puerto E del microcontrolador.
Un punto importante a considerar al momento de utilizar el convertidor A/D,será decidir si
la conversión se hará configurando el conversor a 8 o 10 bits, con lo cual a su vez
estaremos definiendo la resolución en el proceso de conversión.
Esto significa que si elegimos la conversión de una señal analógica a solo 8 bits (28 = 256),
los valores digitales resultantes de la conversión estarán comprendidos entre 0 y 255 (en
binario es de 00000000 hasta 11111111), como se puede observar en la tabla

Cuando la conversión se hace a 10 bits, la resolución aumenta considerablemente en
relación a la de 8 bits, ya que tenemos 210 = 1024 datos de conversión, como se puede
observar en la tabla