informe pid
TRANSCRIPT

INGENIERIA ELECTRONICA
CONTROL DE PROCESOS
CONTROL PID DEL MODULO DE TEMPERATURA USANDO EL MODULO ANALÓGICO EM235 Y EL PLC
SIEMENS S7-200
INTEGRANTES: MILDRED CAJAS
BELEN GUANO
FRANCISCO ORTIZ
DIANA ROMERO
DECIMO NIVEL

ESPE – CONTROL DE PROCESOS INDUSTRIALES
1. TEMA
Control PID del modulo de temperatura usando el modulo analógico EM235 y el PLC siemens s7-200, visualización y control mediante un HMI realizado en LABVIEW.
2. OBJETIVOS
2.1 GENERAL
Realizar un control PID de temperatura a través del PLC SIEMENS S7-200, por medio del módulo analógico EM235 y un HMI realizado en LABVIEW.
2.2 ESPECÍFICOS
Escalar el valor de temperatura y el valor de setpoint de acuerdo a los rangos establecidos.
Diseñar un HMI en el software LABVIEW para visualizar y controlar el proceso. Realizar la comunicación del PLC con LABVIEW a través del servidor OPC server.
3. MARCO TEÓRICO
CPU S7-200.- La CPU S7-200 está formada por una CPU propiamente dicha, una fuente de alimentación y entradas/salidas digitales, todo eso contenido en un módulo compacto. La estructura es la siguiente:
Figura 1. Estructura de la CPU S7-200
2

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Además, contiene un conector de expansión que permite ampliar la CPU con la adición de módulos de expansión.
Figura 2. Conector de Expansión
MODULO ANALOGICO.- El PLC S7-200 no posee capacidad integrada de lectura y escritura de valores analógicos, por lo que se hace necesario conectar un módulo de expansión de entradas analógicas, entre ellos están los modelos: EM 231, EM 232 y EM 235.
El módulo de expansión EM235 que poseen 4 entradas analógicas (voltaje o corriente) y una salida analógica (voltaje o corriente). Su forma física se muestra en la figura 3
Figura 3. Forma física del módulo EM 235
3

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 4. Diagrama de cableado del EM 235
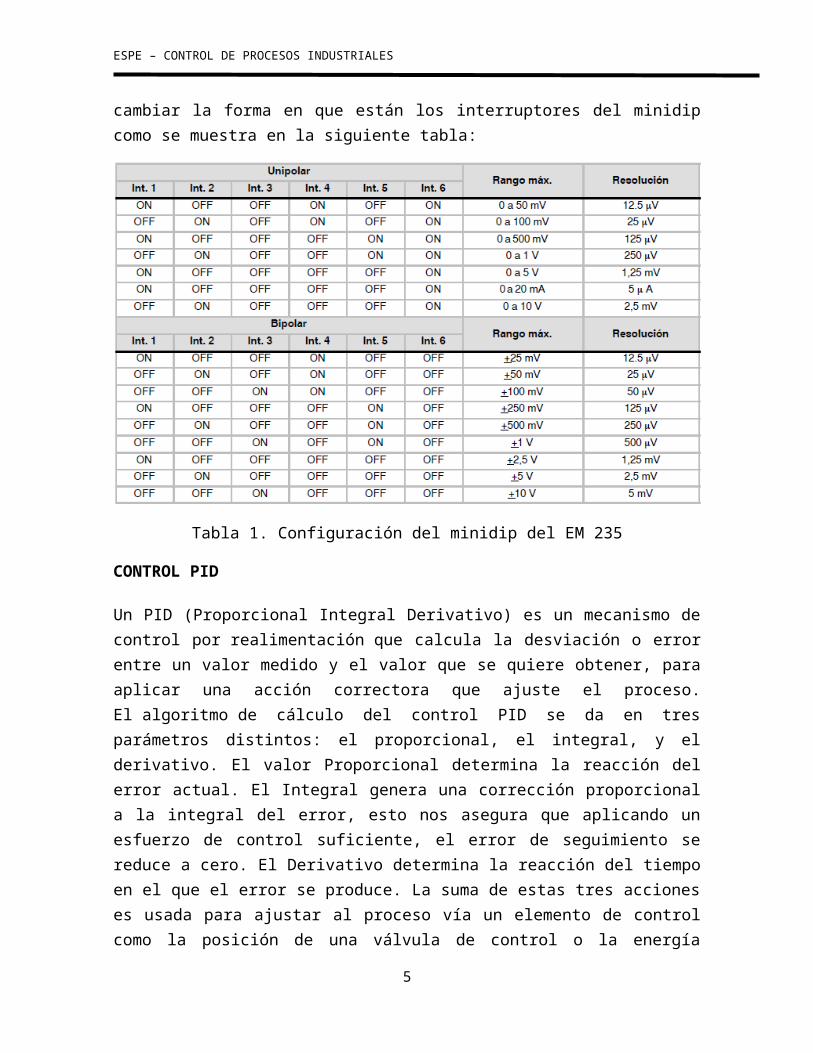
Para la configuración de los rangos y el tipo de entrada analógica (voltaje o corriente) del EM 235 es necesario cambiar la forma en que están los interruptores del minidip como se muestra en la siguiente tabla:
Tabla 1. Configuración del minidip del EM 235
4
ESPE – CONTROL DE PROCESOS INDUSTRIALES
CONTROL PID
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener, para aplicar una acción correctora que ajuste el proceso. El algoritmo de cálculo del control PID se da en tres parámetros distintos: el proporcional, el integral, y el derivativo. El valor Proporcional determina la reacción del error actual. El Integral genera una corrección proporcional a la integral del error, esto nos asegura que aplicando un esfuerzo de control suficiente, el error de seguimiento se reduce a cero. El Derivativo determina la reacción del tiempo en el que el error se produce. La suma de estas tres acciones es usada para ajustar al proceso vía un elemento de control como la posición de una válvula de control o la energía suministrada a un calentador, por ejemplo. Ajustando estas tres variables en el algoritmo de control del PID, el controlador puede proveer un control diseñado para lo que requiera el proceso a realizar. La respuesta del controlador puede ser descrita en términos de respuesta del control ante un error, el grado el cual el controlador llega al "set point", y el grado de oscilación del sistema. Nótese que el uso del PID para control no garantiza control óptimo del sistema o la estabilidad del mismo. Algunas aplicaciones pueden solo requerir de uno o dos modos de los que provee este sistema de control. Un controlador PID puede ser llamado también PI, PD, P o I en la ausencia de las acciones de control respectivas. Los controladores PI son particularmente comunes, ya que la acción derivativa es muy sensible al ruido, y la ausencia del proceso integral puede evitar que se alcance al valor deseado debido a la acción de control.
4. PROCEDIMIENTO
4.1 CONEXIONES DEL MODULO DE TEMPERATURA Y EL PLC
Fig. 5 Conexiones del PLC y el módulo EM 235
5

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Fig. 6 Módulo de temperatura
Fig. 7 Conexiones del módulo de temperatura
4.2 PROGRAMA PARA EL PLC
4.2.1. Configuración del asistente PID
Figura 8. Selección de la configuración del PID
6

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 9. Selección del tipo de lazo
Figura 10. Parámetros del lazo
Figura 11. Configuración de entradas y salidas del lazo
7

ESPE – CONTROL DE PROCESOS INDUSTRIALES
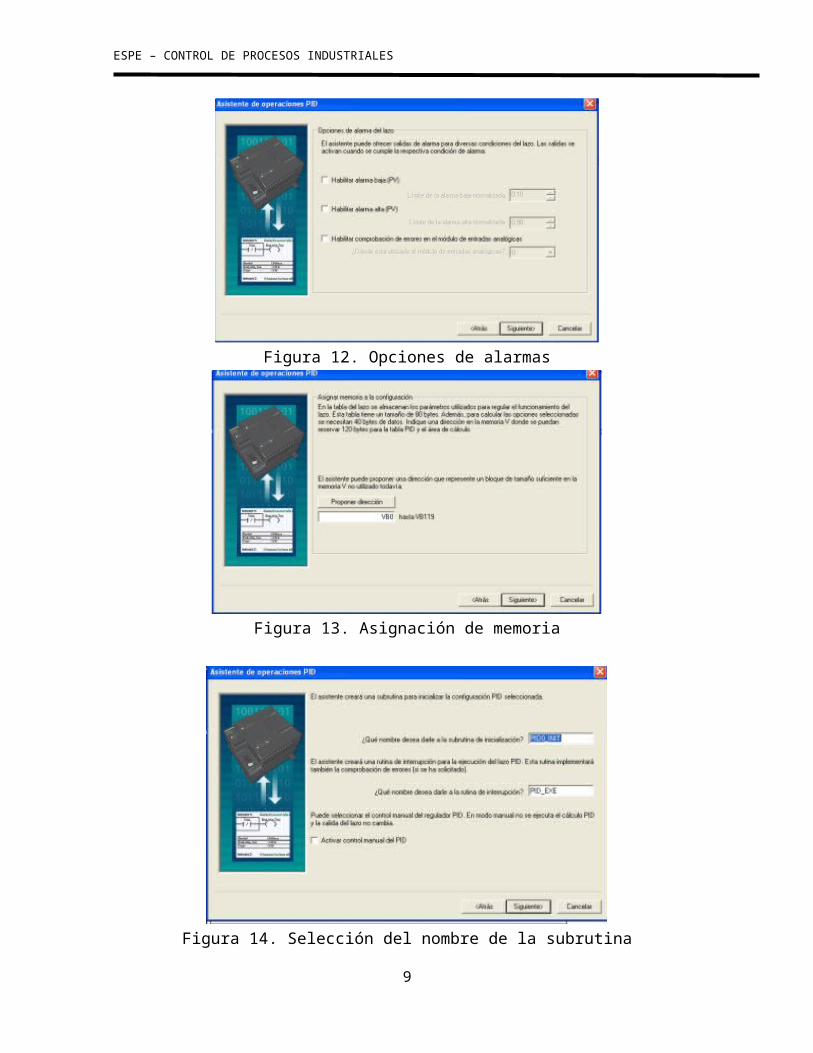
Figura 12. Opciones de alarmas
Figura 13. Asignación de memoria
Figura 14. Selección del nombre de la subrutina
8
ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 15. Finalización de la configuración
Además del la configuración del bloque PID, también hay que realizar el escalamiento de la señal, ya que obtenemos un voltaje de 0 a 5v, y el rago de temperatura es de 20°C a 70°C
9

ESPE – CONTROL DE PROCESOS INDUSTRIALES
FIGURA 16. Programa del PLC
La autosintonización la realizamos con un setpoint de 50
Figura 17. Proceso de autosintonización
10

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 18. Actualizar los valores del auto sintonizado en la CPU
Figura 19. Cargar los nuevos valores en la CPU
11

ESPE – CONTROL DE PROCESOS INDUSTRIALES
4.3 CONFIGURACION DEL TOP SERVER
Configuración del Canal
Click en New Channel / Nombre del Canal /Siguiente / escogemos el PLC con el que estamos trabando en este caso es el SIEMENS S7-200 / seleccionamos el ID con el que nos demos comunicar COM2/ Siguiente / Finalizar.
Figura 20. Configuración del Canal
12

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Configuración del Dispositivo
Click en el dispositivo / Nombre del Dispositivo /Siguiente / Seleccionamos S7-200 / Identidad 2 / Siguiente / Timing / Siguiente / Finalizar.
Figura 21. Configuración del Dispositivo
13

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Configuración del Tag
1. Click enTag / Nombre del Tag /Adrees (solo el tamaño del dato) /Type / Aceptar / Finalizar.
Figura 22. Configuración de los Tags
14

ESPE – CONTROL DE PROCESOS INDUSTRIALES
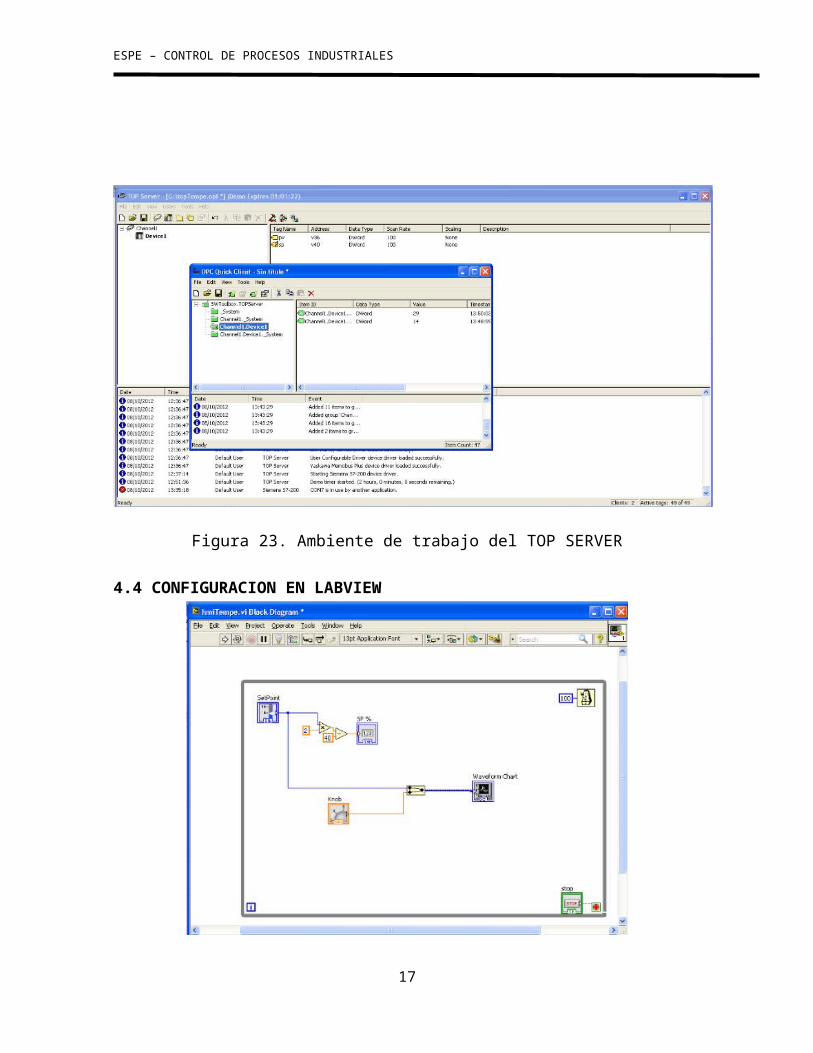
Figura 23. Ambiente de trabajo del TOP SERVER
4.4 CONFIGURACION EN LABVIEW
Figura 24. Diagrama de bloques en LabView
15

ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 25. Panel Frontal en LabView
Configuración de Data Socket para poder obtener la variable del proceso en LABVIEW
16
ESPE – CONTROL DE PROCESOS INDUSTRIALES
Figura 26. Configuración del Datasocket
5. CONCLUSIONES
La función del servidor es recopilar la información adquirida por diversos fabricantes en el computador y codificarla de tal forma que podamos acceder a ella desde algún otro software de aplicación.
El TOP SERVER nos permite obtener y enviar información desde el PLC para almacenarlo en una variable y poder utilizar esta variable en el programa como en LABVIEW y viceversa.
TOP SERVER realiza una comunicación serial con el PLC por lo cual para obtener la información del PLC se deber configurar parámetro de comunicación como es la velocidad de transmisión, bit de parada, bit de paridad, etc.
6. RECOMENDACIONES
Tomar en cuenta el tipo de dato con el que se esté trabajando para realizar las conversiones correspondientes.
No dar perturbación mientras MICRO WIN STEP 7 realiza la auto sintonización Verificar que la posición de los switch sea la correcta para el tipo y el rango de la
variable a adquirir.
7. BIBLIOGRAFÍA
www.support.automation.siemens.com/.../432661 www.swe.siemens.com/spain/web/es/industry/.../S7200 http://dspace.epn.edu.ec/bitstream/15000/8571/3/T%2011112%20CAPITULO
%204.pdf
17