informe de estudio topogrÁfico y geodÉsico
TRANSCRIPT

INFORME DE ESTUDIO TOPOGRÁFICO Y GEODÉSICO
PROYECTO: URBANIZACIÓN ENTRE BOSQUES
UBICACIÓN: ILAMAPA, KILOMETRO 34 CARRETERA A OLANCHO (RN 15)
CONTENIDO: ESTUDIO TOPOGRÁFICO Y POSICIONAMIENTO GEODÉSICO DEL TERRENO
CLIENTE: MERCADEO INMOBILIARIO DE HONDURAS
TEGUCIGALPA, M.D.C., 19 DE FEBRERO DE 2020
DEPARTAMENTO DE FRANCISCO MORAZÁN, HONDURAS
Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. I]
Índice
1. INTRODUCCIÓN ........................................................................................ 1
2. CONSTRUCCIÓN Y POSICIONAMIENTO DE LOS PUNTOS CONTROL .............................. 1
3. MONOGRAFÍAS DE LOS PUNTOS DE CONTROL ..................................................... 5
4. LEVANTAMIENTO CON TECNOLOGÍA LIDAR ........................................................ 7
5. GENERACIÓN DE NUBE DE PUNTOS LIDAR ......................................................... 11
6. POST-PROCESAMIENTO DE LA NUBE DE PUNTOS ................................................. 13
CARACTERIZACIÓN DE LOS DATOS ............................................................... 13
MODELO DIGITAL DEL TERRENO ................................................................. 15
MODELO DIGITAL DEL TERRENO CON CURVAS DE NIVEL ..................................... 15
ORTO-FOTOGRAFÍA ................................................................................ 16
VECTORIZACIÓN ................................................................................... 17
Índice de Tablas
Tabla 1. Equipo utilizado en la fijación de los puntos control Base y de Vuelo ................... 4
Tabla 2 Parámetros de Vuelo ............................................................................ 10
Tabla 3. Parámetros de la tecnología ocupada en el Plan de Vuelo ............................... 11
Tabla 4. Personal Asignado en el Plan de Vuelo ...................................................... 11
Tabla 5. Equipo utilizado en el procesamiento de Datos ............................................ 13
Tabla 6. Personal Asignado procesamiento de Datos. ................................................ 13
Tabla 7. Elementos vectorizados ........................................................................ 18
Índice de Ilustraciones
Ilustración 1. Ubicación espacial del proyecto Entre Bosques (área de importancia) ............ 1

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. II]
Ilustración 2. Posicionamiento de los puntos de control en Google Earth ......................... 2
Ilustración 3. Construcción de monumentos ............................................................ 2
Ilustración 4. Levantamiento estático o enlaces GPS ................................................. 3
Ilustración 5. Informe del CSRS-PPP ..................................................................... 4
Ilustración 6. Equipo LiDAR Optech, modelo Galaxy .................................................. 8
Ilustración 7. Avioneta Cessna ............................................................................ 8
Ilustración 8. Especificaciones de la cámara ........................................................... 9
Ilustración 9. Especificaciones de Optech Galaxy ..................................................... 9
Ilustración 10. Datos del plan de Vuelo ................................................................ 10
Ilustración 11. Líneas de Vuelo para cubrir el área del terreno .................................... 11
Ilustración 12. Corrección de la Trayectoria .......................................................... 12
Ilustración 13. Generación de nube de puntos ........................................................ 12
Ilustración 14. Traslapes de Líneas de Vuelo .......................................................... 13
Ilustración 15. Nube de Puntos a clasificar Colorizada .............................................. 14
Ilustración 16. Sección de puntos a clasificar (perfil) ................................................ 14
Ilustración 17. Vista del relieve del terreno. Modelo Digital ........................................ 15
Ilustración 18. Vista del relieve del terreno con curvas de nivel. Modelo Digital ................ 16
Ilustración 19. Curvas de Nivel .......................................................................... 16
Ilustración 20. Orto-fotografía .......................................................................... 17
Ilustración 21. Vectorización Sobre la Nube de Puntos .............................................. 18
Ilustración 22. Vectorización Sobre la Orto- fotografía .............................................. 18
Ilustración 23. Vectorización Sobre el Modelo Digital del Terreno ................................. 19

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 1]
LEVANTAMIENTO TOPOGRÁFICO Y GEODÉSICO
1. INTRODUCCIÓN
En el presente documento, se describe el alcance de lo que ha sido el desarrollo y resultados
obtenidos del estudio solicitado en la Oferta 19-0003-P001-ET, a partir de la data (escrituras)
proporcionada por el cliente.
Para el desarrollo del estudio topográfico se llevaron a cabo algunas actividades de
investigación como ser:
• Cartas Geográficas de las zonas.
• Sistemas de referencia cartográfica implantada en el sector de estudio.
• Reconocimiento de la zona
• Archivos digitales de imágenes satelitales o fotografías aéreas, etc.
El sistema de referencia utilizado para el levantamiento topográfico en este proyecto es el UTM
Zona 16, con el DATUM Horizontal WGS84.
El Proyecto se localiza en el departamento de Francisco Morazán, en el valle de Ilamapa con
un área total de 1 km2 aproximadamente.
Ilustración 1. Ubicación espacial del proyecto Entre Bosques (área de importancia)
2. CONSTRUCCIÓN Y POSICIONAMIENTO DE LOS PUNTOS CONTROL
Se realizó la visita al proyecto, para conocer las características, rutas, accesos, tipo de
topografía, etc. Se planificó la red de puntos de control preliminar en Google Earth, donde se

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 2]
delimitó el área del proyecto, en una vista en planta se colocaron la cantidad de 3 Puntos de
control y se agregaron a un navegador para posteriormente ser localizados en campo.
Al momento de ser ubicados en campo se procedió a la construcción de los respectivos
monumentos, para cada monumento se determinó su coordenada x, y, z por medio de GPS de
primer orden con doble frecuencia L1,L2 en el sistema UTM zona 16, bajo el modelo Elipsoidal
WGS84. Tomando en cuenta que el punto de control PCI-02 se utilizó como base con cuatro
horas de lecturas, simultáneamente en modo RTK se le dio lectura de coordenadas de al menos
una hora a los demás puntos de control (PCI-01 y PCI-03).
Ilustración 2. Posicionamiento de los puntos de control en Google Earth
Ilustración 3. Construcción de monumentos

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 3]
Ilustración 4. Levantamiento estático o enlaces GPS
Con los datos de observación del punto PCI-02, que fue el punto con mayor tiempo de lectura
se efectuó el Post-Procesamiento, haciendo uso del servicio del instituto CSRS-PPP(Canadá),
una vez obtenida la coordenada definitiva, se procedió a dar coordenadas a los demás puntos
de control enlazados al punto base. El error de la base post procesada por CSRS-PPP obtuvo
errores por debajo de los 5mm en coordenada norte, 2cm coordenada este y 2.2cm en
elevación.
Para corroborar la precisión de dichas coordenadas se inició la base nuevamente en el punto
PCI-02 con la coordenada ajustada del CSRS-PPP y se le dio coordenadas a los PCI-01 y PCI-03
punto obteniendo precisiones de 3 mm en las coordenadas XY.

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 4]
Ilustración 5. Informe del CSRS-PPP
Tabla 1. Equipo utilizado en la fijación de los puntos control Base y de Vuelo
1. Sistema GNSS Topcon RTK, Modelo GR-5.
a. Radio Interno y Modem
b. Satélites GPS y GLONASS
c. Puerto Dual de Bluetooth
d. Doble frecuencia L1, L2
a. Rango De Precisión: 2.0 mm – 2.00 cm.
2. Vehículos 4x4
3. Materiales para Monumentación
4. laptop con Software Topcon Tools
Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 5]
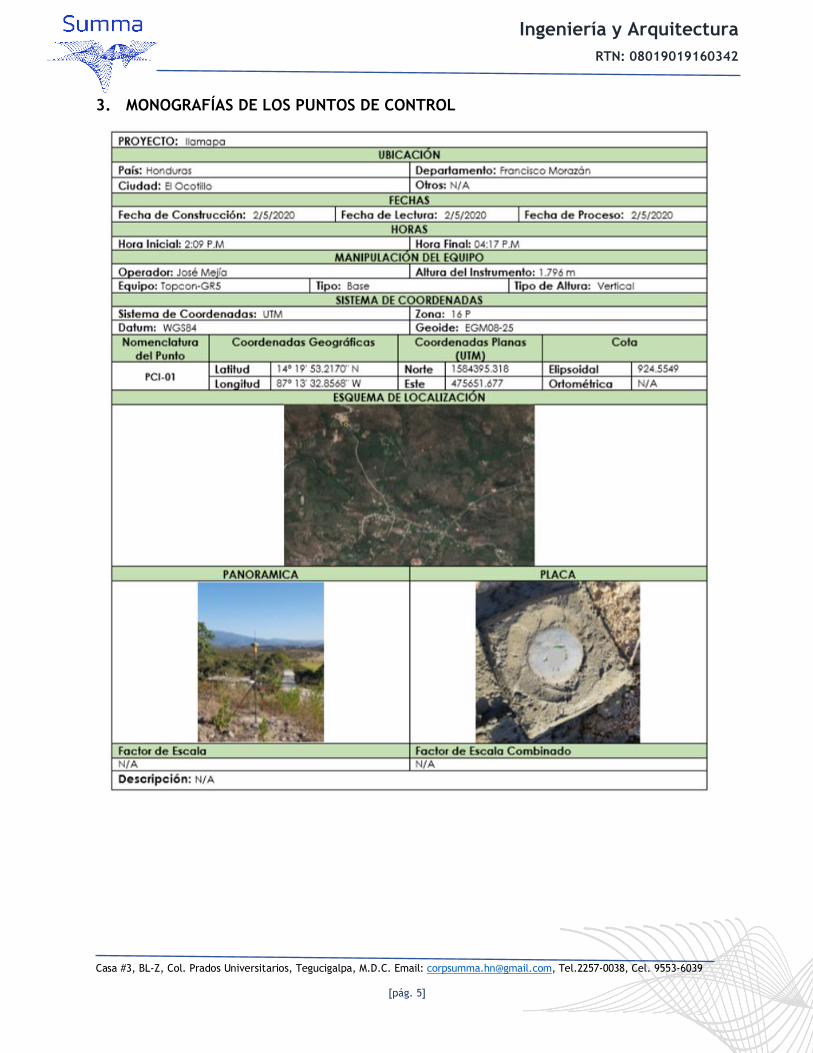
3. MONOGRAFÍAS DE LOS PUNTOS DE CONTROL

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 6]

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 7]
4. LEVANTAMIENTO CON TECNOLOGÍA LIDAR
Se llevó acabo el vuelo LiDAR el día 5/2/2020 en el proyecto Entre Bosques, Ilamapa,
despegando desde Toncontín (MHTG) y aterrizando en Toncontín (MHTG) Este levantamiento se
realizó con el equipo Optech Galaxy Airborne Laser Terrain Mapper (ALTM), instalado en el
avión.

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 8]
Ilustración 6. Equipo LiDAR Optech, modelo Galaxy
Ilustración 7. Avioneta Cessna

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 9]
Ilustración 8. Especificaciones de la cámara
Ilustración 9. Especificaciones de Optech Galaxy

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 10]
Tabla 2 Parámetros de Vuelo
Altura de Vuelo (AGL) 850
Velocidad del Vuelo (knt) 120
Frecuencia de Escaneo (hz) 76
Frecuencia Repetición de Pulso (khz) 350
Densidad Promedio de Puntos (p/m2) 6.84
FOV (°) 45
% Overlap Laser: 40%,
Cámara: 54% Sidelap 60% Endlap
Previo a la realización del levantamiento LiDAR, se planifican las líneas de vuelo, se eligen los
parámetros dominantes y que más se apegan al estilo del levantamiento a realizar, además del
área a cubrir tanto en franja como en longitud, Otros parámetros de importancia al momento
del levantamiento son:
• Frecuencia de escaneo.
• Traslapes de líneas de vuelo.
• Características de la cámara, para la obtención de la resolución de la orto-fotografía.
• Densidad de puntos.
• Altura del vuelo.
• Potencia del láser.
• Entre otros.
Ilustración 10. Datos del plan de Vuelo
Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 11]
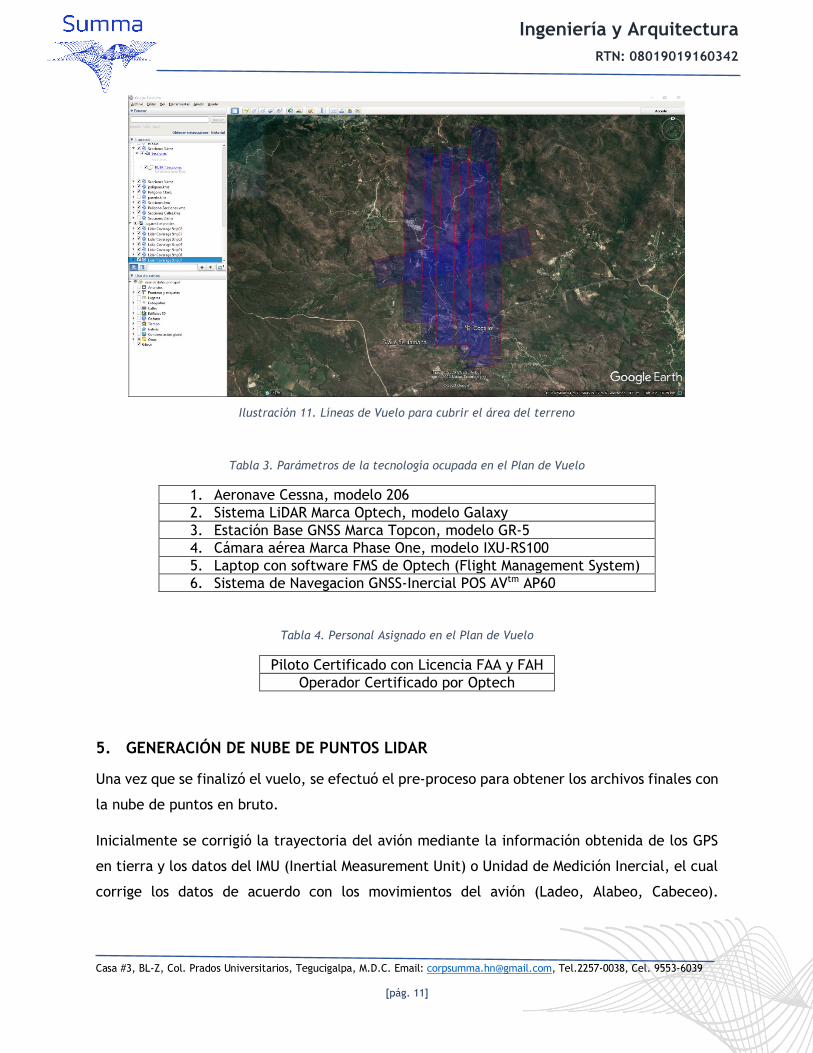
Ilustración 11. Líneas de Vuelo para cubrir el área del terreno
Tabla 3. Parámetros de la tecnología ocupada en el Plan de Vuelo
1. Aeronave Cessna, modelo 206
2. Sistema LiDAR Marca Optech, modelo Galaxy
3. Estación Base GNSS Marca Topcon, modelo GR-5
4. Cámara aérea Marca Phase One, modelo IXU-RS100
5. Laptop con software FMS de Optech (Flight Management System)
6. Sistema de Navegacion GNSS-Inercial POS AVtm AP60
Tabla 4. Personal Asignado en el Plan de Vuelo
Piloto Certificado con Licencia FAA y FAH
Operador Certificado por Optech
5. GENERACIÓN DE NUBE DE PUNTOS LIDAR
Una vez que se finalizó el vuelo, se efectuó el pre-proceso para obtener los archivos finales con
la nube de puntos en bruto.
Inicialmente se corrigió la trayectoria del avión mediante la información obtenida de los GPS
en tierra y los datos del IMU (Inertial Measurement Unit) o Unidad de Medición Inercial, el cual
corrige los datos de acuerdo con los movimientos del avión (Ladeo, Alabeo, Cabeceo).

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 12]
La corrección se condensa en un archivo SBET utilizado posteriormente para la obtención de
los archivos “.las” finales.
Ilustración 12. Corrección de la Trayectoria
Luego de corregir la trayectoria del avión, se procesan los archivos range (datos crudos
obtenidos por el Sensor) junto con el archivo SBET y los puntos de control para obtener los
archivos *.las finales, con los cuales se procede a la clasificación.
Ilustración 13. Generación de nube de puntos

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 13]
Ilustración 14. Traslapes de Líneas de Vuelo
Tabla 5. Equipo utilizado en el procesamiento de Datos
1. Laptop de alta capacidad de procesamiento
Software
• PosPac de Applanix
• LMS de Optech (LiDAR Mapping Suite)
2. Servidor de Datos LiDAR y Almacenamiento
Tabla 6. Personal Asignado procesamiento de Datos.
Operador Certificado por Optech
Analista de Datos LiDAR
6. POST-PROCESAMIENTO DE LA NUBE DE PUNTOS
CARACTERIZACIÓN DE LOS DATOS
Este proceso se efectuó luego de obtener los archivos “.las” (nube de puntos corregida). Se
realizó la clasificación de la nube de puntos, iniciando con el vuelo realizado el miércoles 05
de febrero de 2020 mediante algoritmos calibrados se asignó cada punto a una clasificación que
permita el mejor manejo y visualización al momento del diseño. Para esta etapa se utilizó el
software LP360 de Qcoheren para obtener una clasificación de los siguientes elementos:
• Suelo (TN)
• Vegetación Baja (0 – 3 m)

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 14]
• Vegetación Media (3 – 6 m)
• Vegetación Alta (6 – 60 m)
• Ruidos Altos
• Ruidos Bajos
Ilustración 15. Nube de Puntos a clasificar Colorizada
Ilustración 16. Sección de puntos a clasificar (perfil)
Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 15]
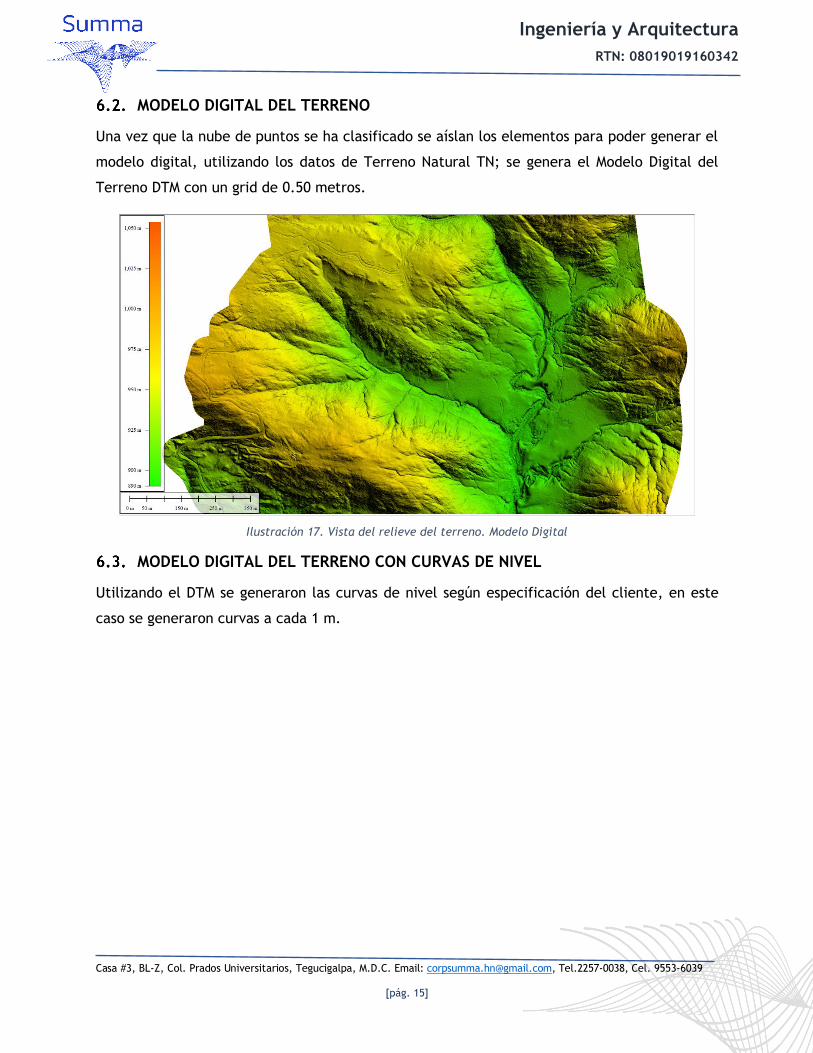
MODELO DIGITAL DEL TERRENO
Una vez que la nube de puntos se ha clasificado se aíslan los elementos para poder generar el
modelo digital, utilizando los datos de Terreno Natural TN; se genera el Modelo Digital del
Terreno DTM con un grid de 0.50 metros.
Ilustración 17. Vista del relieve del terreno. Modelo Digital
MODELO DIGITAL DEL TERRENO CON CURVAS DE NIVEL
Utilizando el DTM se generaron las curvas de nivel según especificación del cliente, en este
caso se generaron curvas a cada 1 m.

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 16]
Ilustración 18. Vista del relieve del terreno con curvas de nivel. Modelo Digital
Ilustración 19. Curvas de Nivel
ORTO-FOTOGRAFÍA
Una orto-fotografía se consigue mediante un conjunto de imágenes aéreas que han sido
corregidas para representar una proyección ortogonal sin efectos de perspectiva, y en la que
por lo tanto es posible realizar mediciones sobre ella, a diferencia de una fotografía aérea
simple que siempre presentará deformaciones causadas por la perspectiva desde la cámara, la
altura o la velocidad a la que se mueve la cámara. A este proceso de corrección digital se le

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 17]
llama orto-rectificación. Por lo tanto, una orto-fotografía (u ortofoto) combina las
características de detalle de una fotografía aérea con las propiedades geométricas de un plano.
Durante el vuelo, se tomaron las fotografías a cada 5.00 segundos debido a la velocidad del
avión que fue en promedio de 120 Nudos.
Con estas fotografías se creó inicialmente un mosaico, que consistió en unir todas las fotografías
en una sola imagen del proyecto mediante la técnica de la aerotriangulación. A su vez, el
mosaico se georreferenció directamente con los datos de la trayectoria corregida para luego
efectuar la orto-rectificación con el modelo digital del terreno y los puntos de control. El
resultado de este proceso es un orto-mosaico con una resolución de 10 cm por píxel y verificado
con respecto a la nube de puntos y al Modelo Digital del terreno (DTM).
Este proceso se desarrolló con el fin de obtener imágenes rectificadas, con precisión y
generando así un producto de mucha utilidad para una mejor interpretación o análisis espacial.
Ilustración 20. Orto-fotografía
VECTORIZACIÓN
Como un componente adicional del estudio topográfico y geodésico del proyecto, se priorizó el
estudio para el acceso principal al proyecto.
Para el desarrollo de la vectorización se utilizó la nube de puntos, DEM y orto-fotografía, se
generaron archivos donde se nos permitió identificar los diferentes elementos existentes en el
proyecto y que son necesarios para el diseño y análisis.

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 18]
La vectorización consistió en dibujar en una vista en planta, los siguientes elementos, partiendo
de la nube de puntos, el modelo digital y la Orto-fotografía:
Tabla 7. Elementos vectorizados
Elementos Vectorizados
Calzada Línea Central
Ilustración 21. Vectorización Sobre la Nube de Puntos
Ilustración 22. Vectorización Sobre la Orto- fotografía

Ingeniería y Arquitectura
RTN: 08019019160342
Casa #3, BL-Z, Col. Prados Universitarios, Tegucigalpa, M.D.C. Email: [email protected], Tel.2257-0038, Cel. 9553-6039
[pág. 19]
Ilustración 23. Vectorización Sobre el Modelo Digital del Terreno
__________________________________________________
Ing. M.Sc. Christopher Andreé Torres Soliman Representante legal Corporación Summa S.A. de C.V.