iitotor - red.uao.edu.co
TRANSCRIPT

METODO DEL VECTOR ESPIRAL APLICADO EN EL ANALISIS DEL
IITOTOR DE INDUCCION
ERICA ALEXAI\ÍDRA BLANQUICET PALMA
MIRIAM RUTH CORTES CASANOVA
ñc,t
lgl 'SrY#$o ;iltlülulülütuuillülrutlil,e
l
CORPORACION UNTVERSITARIA AUTONOMA DE OCCIDENTE
DTVISION DE INGENIERIAS
PROGRAMA ELECTRICA
SANTIAGO DE CALI
)240 3 6
1997

METODO DEL VECTOR ESPIRAL APLICADO EN EL ANALISIS DEL
MOTOR DE I¡TDUCCION
ERICA ALEXA¡{DRA BI-AI\IQTIICET PALMA
MIRIAM RUTH CORTES CASANOVA
Trabajo de Grado presentado como requisito parcialpara optar el título de fngeniero Electricista
t
thlvrrsia¡d Aut6ncm¡ dr occlamtstccroN 8l8Lr0f[cADirector
Ingeniero Enrrique Ciro Quispe O.
CORPORACON TJNIVERSITARIA AUTONOMA DE OCCIDENTE
DIVISION DE INGEI\IERIAS
PROGRAMA ELECTRICA
SA¡{TIAGO DE CALI
1997
Tdl Q,
B 6a3rpl/4/
-t-
at\!-/
.'C
-'fl
't'
_t>
IIf
.-fiF.l)
I.'c,,t* ,
L
NOTA DE ACEPTACION
Los miembros del comité de grado del proyecto
titulado "METODO DEL VECTOR ESPIRAL
APLICADO EN EL ANALISIS DEL VECTOR
DE INDUCCIOI\f', consideramos que el trabajo
desarrollado por los estudiantes de Ingeniería
Electrica, Erica A. Blanquicet P. y Miriam R
Cortés C. Cumple con las exigencias establecidas
como requisito para optar el título de
INGENIERO ELECTRICISTA En constancia
se firma a los 29 días del mes de mayo de 1997.
AGRADECIMIENTOS
Los autores expresan sus agradecimientos:
Al Ingeniero Enrrique Ciro Quispe, director del proyecto, por su
orientación académica en el proyecto, apoyo, amistad y confianza.
Al Ingeniero Antonio Lemos, asesor del proyecto, por su colaboracion.
A Heman Timaran y a Lilia A. Quiñones, por su ayuda en el manejo de
los programas utilizados para graficar.
DEDICATORIA
A mí unico padre Jesucristo, QU€ siempre me acompaña en buenos y
malos momentos.
A mí madre que creyó en mí y con sacrificio, me ha dado todo lo
necesario para salir adelante.
A mí abuela por su confranz.a, cariño y apoyo brindados dr.rante toda mi
üda.
Erica
A mi madre por su amor y compresión en los momentos dificiles.
Miriam
CONTENIDO
O. INTRODUCCION
0.1 ANTECEDENTES
0.2 PLANTEAMIENTO DEL PROBLEMA
0.3 DEFINICION DE OBJETIVOS
I. TEORIA DEL VECTOR ESPIRAL
1.I CONCEPTOS BASICOS
1.1.1 Frecuencia Compleja
1.2 EXCITACION CON FRECUENCIA COMPLEJA
I.3 VECTOR ESPIRAL
1.3.1 Para el Estado Estable
1.3.2 Para el Estado Transitorio
1.4 VECTOR ESPIRAL Y SUS VALORES
Pág.
1
I
7
8
l0
l0
l0
lt
18
20
22
29

1.5 DETERMINACION DEL VECTOR ESPIRAL
1.6 TEORTA UNIFICADA DE CIRCUITOS A.C
35
35
2. METODO DEL VECTOR ESPIRAL Y SU APLICACION 37
2.1 ANALISIS DEL VECTOR ESPIRAL EN CIRCUITOS A.C 37
2.2 ANALISIS Y COMPARACION DEL METODO DELVECTOR ESPIRAL EN CIRCUITOS DE A.C 43
3. VECTOR ESPIRAL EN EL MOTOR DE INDUCCION 56
3.1 ECUACIONES FUNDAMENTALES PARA LOS MOTORES 56
3.2 ECUACIONES DEL CIRCTIITO DEL MOTOR DEINDUCCION. METODO DE SEPARACION DE FASES 59
3.3 ANALISIS EN ESTADO ESTABLE DEL MOTOR DEINDUCCION 75
3.4 LINEACION DE LAS CARACTERISTICAS DETORQUE-VELOCTDAD DEL MOTOR DE TNDUCCTON 82
3.5 TRAbISFORMACION DEL CIRCUTTO EQUIVALENTEDEL MOTOR DE INDUCCION 86
4. A}IALISIS TRA}ISITORIO ELECTRON4AGNETICO DELMOTOR DE INDUCCION
4.1 ANALISIS TRANSITORIOS DEL MOTOR DE INDUCCIONPOR EL METODO
4.1.1 Análisis Transitorio del la Corriente de Enfradadel Motor de Inducción
94
95
95
4.1.2 Análisis Transitorio alimentado con fuentede voltaje del motor de Inducción
5. TRANSFORMACION DE LOS CIRCUITOS EQUIVA.LENTES DE ESTADO ESTABLE
6. CONCLUSIONES
BIBLIOGRAFIA
GLOSARIO
ANEXOS
106
122
129
FIGURA I.I
FIGURA I.2
FIGURA 1.3
FIGURA I.4
FIGURA 1.5
FIGURA 1.6
FIGURA 1.7
FIGURA 1.8
FIGURA 1.9
FIGURA 2.I
FIGURA 2.2
FIGURA 2.3
LISTA DE FIGURAS
Representación de la Ecuación 1.5 en 6
Frecuencia Compleja con 6:0
Excitación en el dominio del Tiempo
Excitación en el Dominio del Tiempo con l, > 0
Excit¿ción en el Dominio del Tiempo con l, < 0
Fasor Rotatorio y la Excitación en el Dominiodel Tiempo con l. > 0
Fasor Rotatorio y la Excitación en el Dominisdel Tiempo con l" < 0
Vector Espiral en el Plano Complejo
Vector Espiral de la Ecuación l.13 para t : 0
Circuito RLC Serie de C.A
Circuito RLC Serie de C.A
Circuito RLC en Función de la Frecuencia
Pág.
t2
l3
14
l5
1ó
l8
20
25
37
43
50
17
FIGIIRA 2.4 Superposición de las curvas 54
FIGURA 3.1 circuito Eléctrico con resistencia e Induct¿ncia s7
FIGURA 3.2 Modelo del Motor de tnducción 59
FIGURA 3.3 Circuito Equivalente de Estado EstableTipo T del Motor de Inducción 74
FIGURA 3.4 Curva de Torque-Velocidad del Motorde Inducción de la Tabla 3.1
FIGURA 3.5 Confrol de Resistencia Secundaria delmotor de Inducción
FIGURA 3.6 Curvas de Torque-Velocidad del ControlFAM Tipo T del Motor de Inducción
FIGURA 3.7 Circuito Equivalente General de EstadoEstable del Motor de Inducción
FIGURA 3.8 Circuito Equivalente de Estado EstableTipo T-I del Motor de Inducción 91
FIGURA 3.9 Circuito Equivalente de Estado EstableTipo T-tr del Motor de Inducción 92
FIGURA 3. l0 Circuito Equivalente de Estado EstableTipo L del Motor de Inducción 93
FIGURA 4.1 Circuito Equivalente de Estado Transitoriopara la Corriente de Entrada del Motor de Inducción 99
FIGURA 4.2 Respuestas de las Corrientes y Torque parala Corriente de Entrada al Motor de Inducción 103
82
85
88
. FIGURA 4.3 Circuito Equivalente de Estado TransitorioTipo T del Motor de Inducción 111
FIGURA 4.4 Tiempo Constantes (T . en la Ecuación 4.7) I 16
FIGURA 4.5 Término Transitorio de la Velocidad Aogula¡ Il7
FIGURA 4.6 Respuesta Transitoria del Motor de Inducciónen el Arranque sin Corriente en t : 0 I 19
FIGURA 4.7 Respuesta Transitoria del Motor de Inducciónen Vacío con Velocidad de 60Ilz sin Corrienteen t:0 l2l
FIGURA 5.1 Circuito Equivalente de Estado Transitorio Tipo
T-I del Motor de Inducción 123
FIGURA 5.2 Circuito Equivalente General de Estado Transitorio del Motor de Inducción 125
FIGURA 5.3 Circuito Equivalente de Estado Transitorio TipoT-II del Motor de Inducción 126
LISTA DE TABLAS
TABLA 2.1 Valores Corrientes en Circuitoscon los dos métodos
TABLA 3.1 Clasificación y Costantes del Circuitode un Motor de Inducción
TABLA 3.2 Valores Torque - Deslizamiento dela Ecuación 3.50
TABLA4.2 Datos de Corrientes y Torque alimentadocon Fuente de Corriente
Pág.
54
79
80
104
LISTA DE ANEXOS
PAG
ANEXO I. Calculo de las Constantes A r y A z
del Circuito RLC 133
ANEXO tr. Vector espiral y la transformada de Laplace 136
ANEXO III. Corrientes en Estado Estable Expresadasen Vectores Circulares 139
ANEXO IV. An:ilisis Transitorio y Torque del Motor deInducción Alimentado con Fuente de CorrientePor Medio de la Transformada de la Place l4Z
ANEXO V. Fórrnulas Matemáticas 146
RESUMEN
En el presente proyecto se estudia la teoría del vector espiral, aplicada a
circuitos eléctricos de C. A y a los motores trifásicos de inducción.
El primer lugar se expone brevemente los fundamentos de la teoría del
vector espiral, luego se muestra aplicación de ésta a los circuitos
eléctricos áe C.A y a los motores trif,lsicos de inducción, utilizado para
éste ultimo, el método de separación de fases.
Tambien muesüa la gran utilidad de la teoría del vector espiral, en el
analisis de los estados transitorios del Motor de Inducción.
Finalmente se presentzla aplicación de ésta teoría al estudio de un motor
en particular
O. INTRODUCCION
0.1 ANTECEDENTES
Hasta el momento en nuestro medio, la solución de circuitos C.A" se
analiza con el estado estable y el transitorio usando teorias diferentes. En
la teoría C.A la notación de vector o fasor se ha usado para el análisis del
estado estable. El fasor es un vector estacionario en el plano complejo, en
el cual no podemos expresar variables en estado transitorio. Las variables
en estado transitorio son expresadas por su valor real instantáneo.
Presentando dos teorías diferentes para estados variables.
La solución de las ecuaciones para circuitos y máquinas eléctricas han
sido expresadas desde principio de siglo en fonna de ecuaciones
diferenciales, con las que se puede hacer el modelamiento matemático de
2
la máquina de inducción.
cuando ss ¡sariza el proceso de modelarniento en variables de fase de esta
máquina, en variables fisicas que pueden ser medidas directas e
indirectamente, se tiene seis ecuaciones diferenciales de tensión y una
ecuación diferencial de movimiento.
El desarrollo de las teorías para el análisis de las máquinas eléctricas ha
sido largo y hasta hoy está en pleno desarollo, pues lo que se trata de
presentar en un modelo matemático, son las complejas interacciones
electomagnéticas que ocuren dentro de la máquina en los procesos
üansitorios.
El primer paso en el desarollo de las teorías para el análisis transitorio de
las máquinas eléctricas, fue propuesto por R.H. Park quien propuso,
reemplazar las variables asociados al bobinado estatórico de la máquina
síncrona (voltaje, corriente y flujo) por variables asociadas a un bobinado
ficticio de dos ejes DQ que gira con el rotor. Es decir se fransforma las
3
variables referidas al sistema de referencia estatórico a un sistema de
referencia fijo al rotor, a esta üansfonnación se le denomina
fransformación de Pa¡k..
Luego Stanley aplicó este cambio de variable al analisis del motor de
inducción, mosfrando que si las variables del bobinado del rotor son
transformadas a variables corespondientes a un bobinado ficticio de dos
ejes DQ, con sistema de referencia en el estator.
Las contribuciones de Park, Stanley y otros autores forma¡on lo que hoy
se conoce como teoría de los sistemas de referencia (TSR).
Posteriormente G. Kron plante4 r¡na teoría unificada para el analisis de
máquinas eléctricas, transforma las variables de los bobinados del estator
como las del rotor de máquinas de inducción simétricas, a un sistema de
referencia que gira a la velocidad del campo giratorio o velocidad
síncrona. El otro nivel matemático que Kron usó para presentar su teoría,
hüo que no fuera comprendida y no hubiera aplicación práctica inmediata.
4
Ohos autores como Gibbs, Adkins etc, adecuaron el lenguaje tensorial
propuesto por Kron, al íúgebra matricial y tiempo después, se conoce las
primeras aplicaciones de esta teoría que actualmente se le denomina
Teoría Generalizada de Máquinas Eléctricas (TGME).
P.Kovocs e I.Racs propusieron la teoría del vector espacial para el
analisis transitorio de las máquinas eléctricas de corriente altern4 es la
única que permite considerar que variables como el flujo magnético y la
fuerza, magnetomatriz estan distribuidos en el espacio a lo largo del entre
hierro de la máquina, infioduciendo con este objetivo operadores
espaciales.
Esta teoría permite además simplificar notablemente las ecuaciones
dinámicas de la máquina de induccióq reduciéndolas solamente a dos
ecuaciones vectoriales espaciales y finalmente proyectarlas sobre los ejes
DQ.
En 1991 S. Yamanura propuso la teoría del vector espiral para el análisis
de circuitos y máquinas eléctricas. El vector espiral es una fi¡nción
5
exponencial variable en el tiempo y de índice complejo, ésta a diferencia
de los anteriores no utiliza el modelo de los ejes De.
Durante los cambios producidos en la posguera mundial, surgió la teoría
de la retroalimentación la cual se aplica a los motores de corriente
continua, llamados motores servo, donde el motor de Corriente continúa
fue el de mayor apogeo, dejando atr¿is el motor de corriente altema.
Los avances en la electrónica iniciados por los semiconductores,
incrementa la corriente suministrada y condujo al progreso en la
tecnología.
En los motores de control clasico, la variación del voltaje generalmente
consistía en un rectificador de arco de mercurio. Pa¡a esta época la
energía sr¡ministrada, era la de corriente continu4 ya que la alterna era
dificil de conholar, por lo tanto los motores de control eran generalrnente
de corriente continua.
6
La conversión de corriente alterna fue fácil y económica de esta manera
los motores de corriente continua servomotores, florecieron en toda la
industria y en la automatización. Este fue el comienzo del manejo de los
motores modemos.
En los motores clasicos el objetivo principal era el de control de la
velocidad, mientras que en los motores modernos tanbién es el del torque.
Los motores de CA. estaban ligados al sincronismo de la velocidad, sin
embargo en los ultimos años el motor de inducción de rotor de jaula de
ardilla, ha desplazado al motor de corriente continua en muchas
aplicaciones . Esto se ha logrado al avance de la electrónica de potencia,
la microelecüónica y la teoría de contol, que actualmente perrriten
controla¡ la tensión y la frecuencia de la red, así.mismo estos avances
tecnológicos permitieron la implement¿ción de las técnicas de control.
La teona del vector espiral se aplicará al analisis de los motores de CA,
éste es importante debido a que presenta características y aspectos muy
útiles, no conocidos anteriormente.
0.2 PLANTEAMIENTO DEL PROBLEMA
En los circuitos eléctricos de CA., la notación de fasor se ha usado para el
analisis del estado estable con el cual se puede realizar un estudio rápido y
sencillo, pero este método no puede ser aplicado al estado transitorio, es
decir se obtienen respuestas separadas para cada uno de los estados . Este
proceso es tedioso e incomodo ya que para anali-ar los circuitos CA. se
debe estudiar dos teorías separadas en notaciones diferentes.
El fenómeno transitorio para máquinas CA. ha permanecido en un área
que está en pleno desarollo, donde proponen nuevas teorías para analizar
este fenómeno. El estudio de los proceses fi'ansitorios del motor de
inducción permite conocer: la duación del proceso de arranque, la
evolución de la corriente, la variación del torque electromagnético en el
arranque o sobrecargas, etc; con estos datos se puede conocer la dinámica
de la máquin4 definir las protecciones eléctricas e implementar finalmente
el confrol.
8
Por lo tanto el modelanriento y el análisis de los motores, es uno de los
problemas de mayor interés en la ingeniería eléctrica.
Con la realiz¿si5n de este proyecto se pretende buscar soluciones simples,
adecuadas y rapidas, pa¡ia los circuitos eléctricos de CA. y el motor
trifasico de inducción, analizando más a fondo el fenómeno transitorio en
dichas máquinas.
0.3 DEFINICION DE OBJETIVOS
Con el fin de solucionar los problemas mensionados se han definido los
siguientes objetivos:
- Estudio y descripción de la teoría del vector espiral.
- Demostrar que con este método se puede expresar casi toda clase de
va¡iables de estado que aparecen en circuitos eléctricos.
9
se aplicará el método del vector espiral, al estudio del motor de
Inducción en estado estable y transitorio.
Comparar la aplicación de la teoría del vector espiral con la teoría del
vector espacial; ya que es una teoría muy poderosa en el análisis de
máquinas eléctricas. No se compaftrn los ofios métodos pues son
mucho más complejos en su forma matemática.
1. TEORIA DEL YECTOR ESPIRAL
1.1 CONCEPTOS BASICOS
1.1.1 Frecuencia Compleja :Los tipos de excitación mas utilizados son :
La continua y la senosoidal. El objetivo ahora es incrementar el número
de excitaciones con base en una excitación más general que incluye las
dos anteriores y cuaffo nuevas excitaciones, y que además permita una
solución simple, de tipo algebraico que contemple respuestas en régimen
permanente y en régimen tansitorio. Esa excitación general, se estnrctura
por medio de la frecuencia compleja.
Cuando se tiene excitación senosoidal- tal como:
v:",12V(rrlt+rp) (1.1)
11
Se puede pasar esta excitación del dominio del tiempo al dominio de la
frecuencia, lu tJlizando la transformación fasorial por medio de la identidad
de Euler, se tiene:
v: fre lJrV er(ot+e) ]
v : Be l,JtV. j<ot.le 1
v : JIv lcp
(1.2)
(1.3)
En la ecuación 1.1 la amplitud de la excitación es constante e igual a JiV;
se considera ahora una amplitud variable en el tiempo t¿l como Jl Ve",
donde ¡" es una cantidad real tal que si l, > 0 la amplitud es creciente y
si l. < 0 la nmplitud es decreciente.
La excitación queda:
v- J-z Vert cos (cot + g;
La antenor ecuación representa una senoidal amortiguada con I < 0,
pasandola al dominio de la frecuencia.
v: Re lJtV eLt ei(<ot+e.¡,
v: Re LJIV.(r+ jor)t ej*]
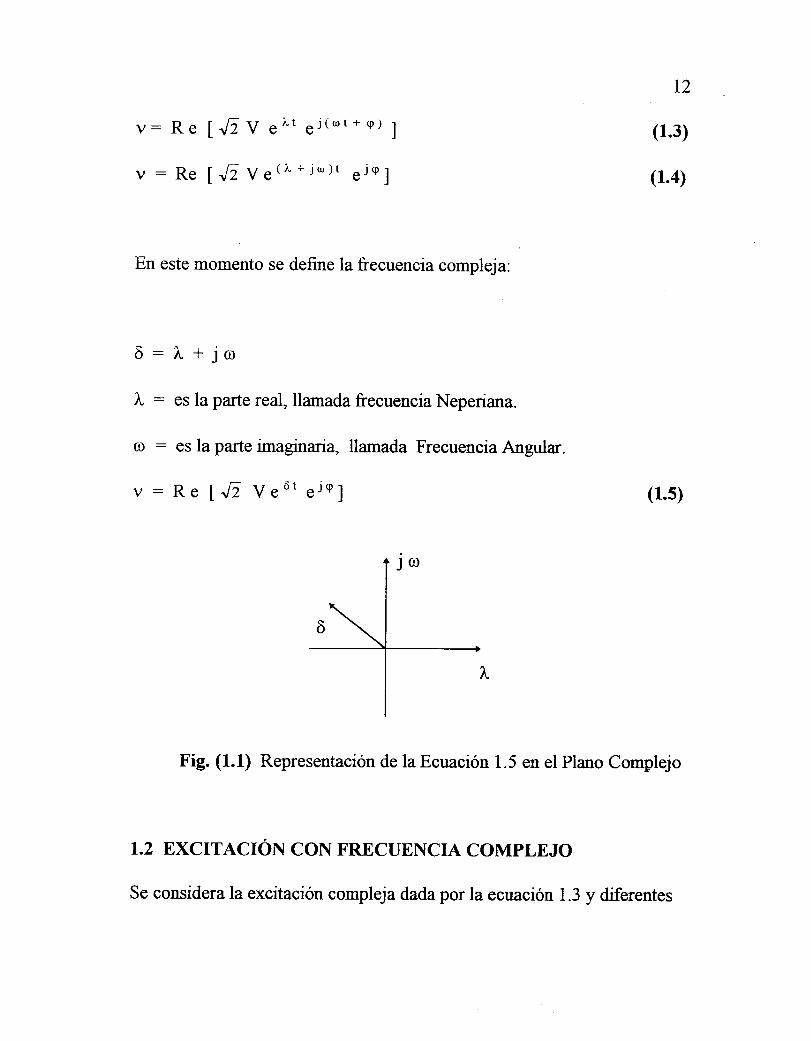
En este momento se define la frecuencia compleja:
6:1"+jco
l. : es la parte real, llamada frecuencia Neperiana.
(D : es la parte imagmaria, llam¿da Frecuencia Angular.
v : Re lJt Ve6, ejel
12
(1.3)
(1.4)
(1.5)
Fig. (1.1) Representación de la Ecuación 1.5 en el Plano Complejo
1.2 EXCITACIÓN CON FRECUENCIA COMPLEJO
Se considerala excitación compleja dadapor la ecuación 1.3 y diferentes

13
valores para 6.
a) 6 : 0 . En este caso la representación en el plano E es el punto de
orígen donde l.:0 y o : 0, reemplazando estos valores en la ecuación
1.3 se tiene :
v:"lzvcosq:A
Y su representación en el dominio del tiempo es una recta de pendiente
nula, tai como se muestra en la figuta (1.2)
Fig ( 1.2 ) Frecuencia Compleja con 6:0
Se concluye que cuando 6:0 la excitación es continua.
b) 6 : jal la representación en el plano 6 es el eje imaglnario jro y por
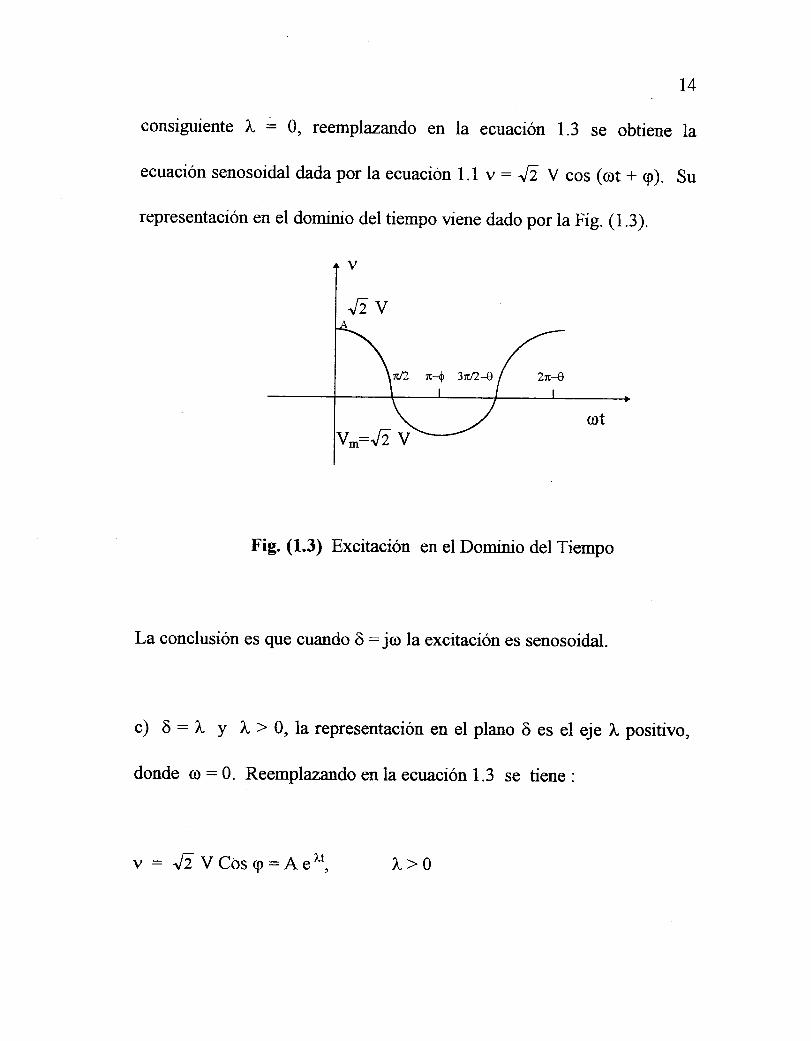
consiguiente x : 0, reempl¿tzando en Ia ecuación 1.3 se obtiene
ecuación senosoidal dada por la ecuación l.l v : Jt v cos (rot + g;.
representación en el dominio del tiempo üene dado por la Fig. (1.3).
Fig. (1.3) Excitación en el Dominio del Tiempo
La conclusión es que cuando 6: jo la excitación es senosoidal.
c) 6 : 1" y l. > 0, la representación en el plano 6 es el eje l, positivo,
donde c0 : 0. Reemplazando en la ecuación 1.3 se tiene :
l4
la
Su
v: Ji VCos(p:Aelt, ¡,>0
l5
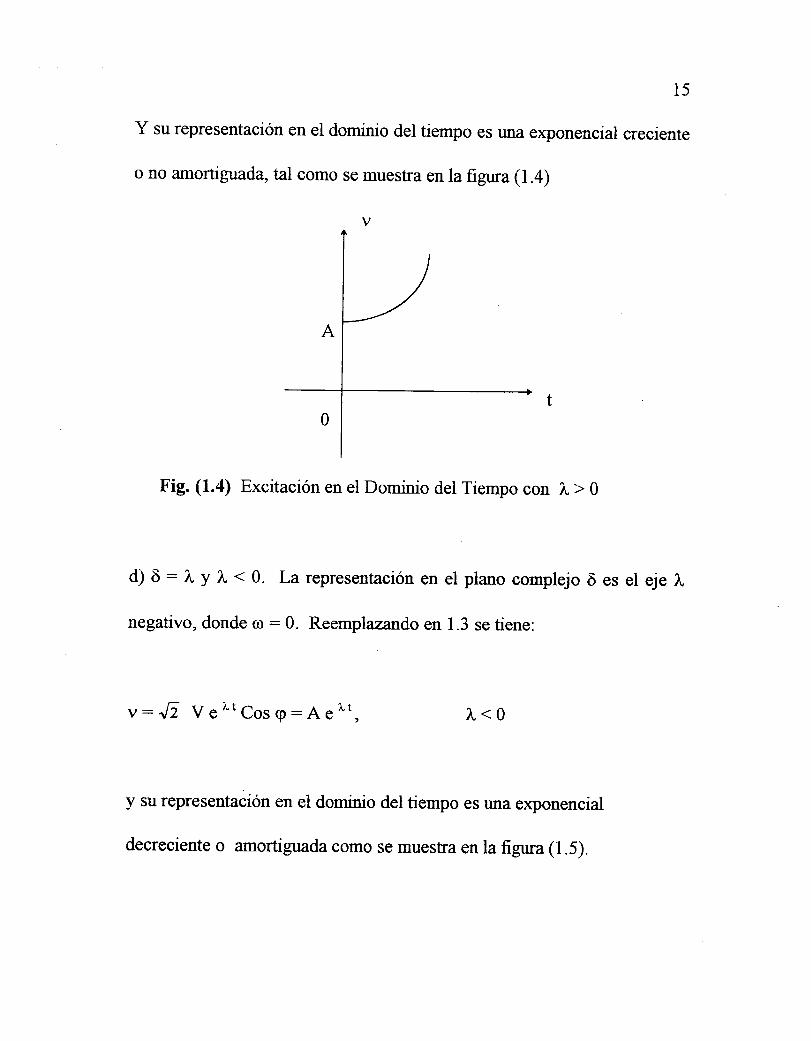
Y su representación en el dominio del tiempo es una exponencial creciente
o no ¿unortiguada, tai como se muesfia en la figora (1.4)
Fig. (1.a) Excitación en el Dominio del Tiempo con l, > 0
d) 6 : l, y l, < 0. La representación en el plano complejo 6 es el eje l,
negativo, donde co :0. Reemplazando en 1.3 se tiene:
v:Jl vertCosg:Aelt, l,<0
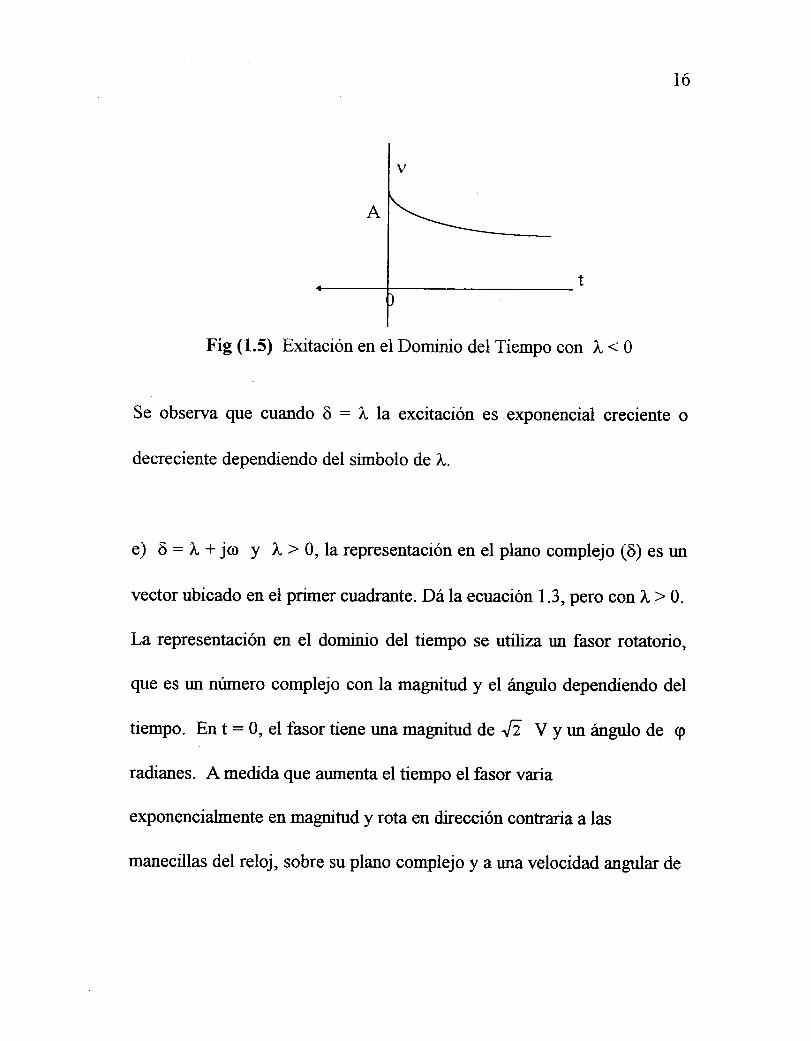
y su representación en el dominio del tiempo es una exponencial
decreciente o a:nortiguada como se muestra en la figura (1.5).
1ó
Fig (1.5) Exitación en el Dominio del Tiempo con ¡, < 0
Se observa que cuando 6 : l. la excitación es exponencial creciente
decreciente dependiendo del símbolo de 1".
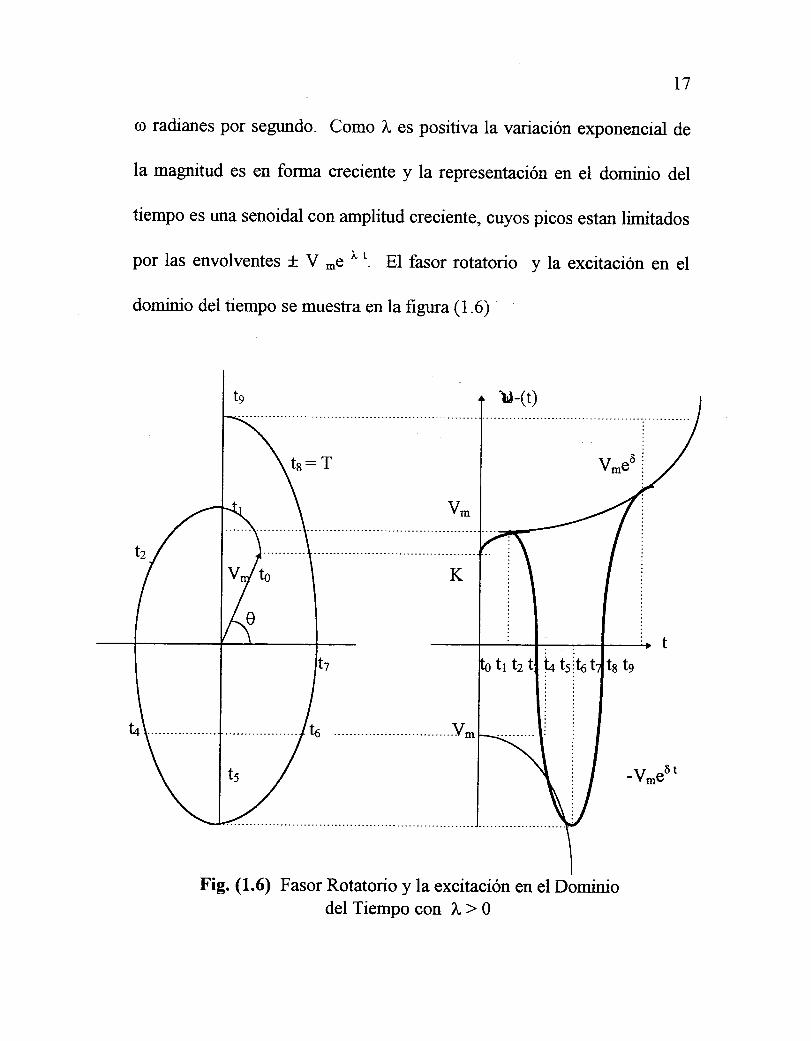
e) 6 : l" + jco y l. > 0, la representación en el plano complejo (6) es un
vector ubicado en el primer cuadrante. Dá la ecuación 1.3, pero con l" > 0.
La representación en el dominio del tiempo se utiliza un fasor rotatorio,
que es un número complejo con la magnitud y el angulo dependiendo del
tiempo. En t : 0, el t-asor tiene una magnitud de Jl V y un angulo de g
radianes. A medida que aumenta el tiempo el fasor varía
exponencialmente en magnitud y rota en dirección conüaria a las
manecillas del reloj, sobre su plano complejo y a una velocidad angular de
17
o radianes por segundo. Como l, es positiva la variación exponencial de
la magnitud es en forma creciente y la representación en el dominio del
tiempo es una senoidal con amplitud creciente, cuyos picos estan limitados
por las envolventes + V -e it. El fasor rotatorio v la excitación en el
dominio del tiempo se muestra en la figura (1.6)
Fig. (1.6) Fasor Rotatorio y la excitación en el Dominiodel Tiempo con ¡" > 0
t
l8
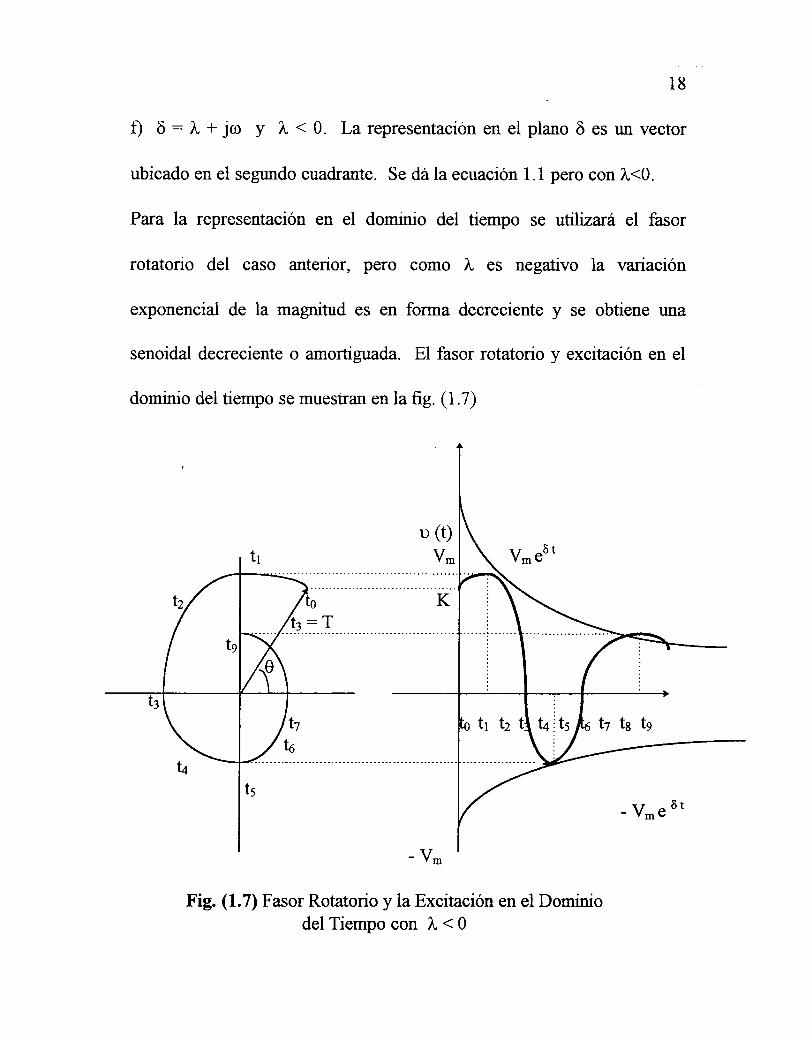
0 6 : l, + jcrl y l" < 0. La representación en el plano 6 es un vector
ubicado en el segundo cuadrante. Se dá la ecuación 1.1 pero con l,<0.
Para la representación en el dominio del tiempo se utiltzará el fasor
rotatorio del caso anterior, pero como I es negativo la variación
exponencial de la magnitud es en forma decreciente y se obtiene una
senoidal decreciente o amortizuada. El fasor rotatorio v excitación en el
dominio del tiempo se muesfran en la fig. (i.7)
Fig. (1.7) Fasor Rotatorio y la Excitación en el Dominiodel Tiempo con l" < 0
D (t)v. V-€E'
ttk
- V-€ 6'
-v*

19
Y cuando 6 : l, + jr,l, la excitación es una senoidal amortiguada y 6 no
amortiguada, dependiendo del signo 1,.
1.3 VECTOR ESPIRAL
Pa¡a el análisis de circuitos eléctricos y máquinas eléctricas, se puede
estudiar su comportarniento en base a ecuaciones diferenciales que
relacionan las variables con los parámefios de la máquin4 cuya solución
general puede escribirse en ténninos de una frnción exponencial va¡iable
en el tiempo, así:
i: Ae 6t
6:-1,+olj
(1.6)
Autünom¡ dr 0ellrhstcctoN B|BLI0IECá
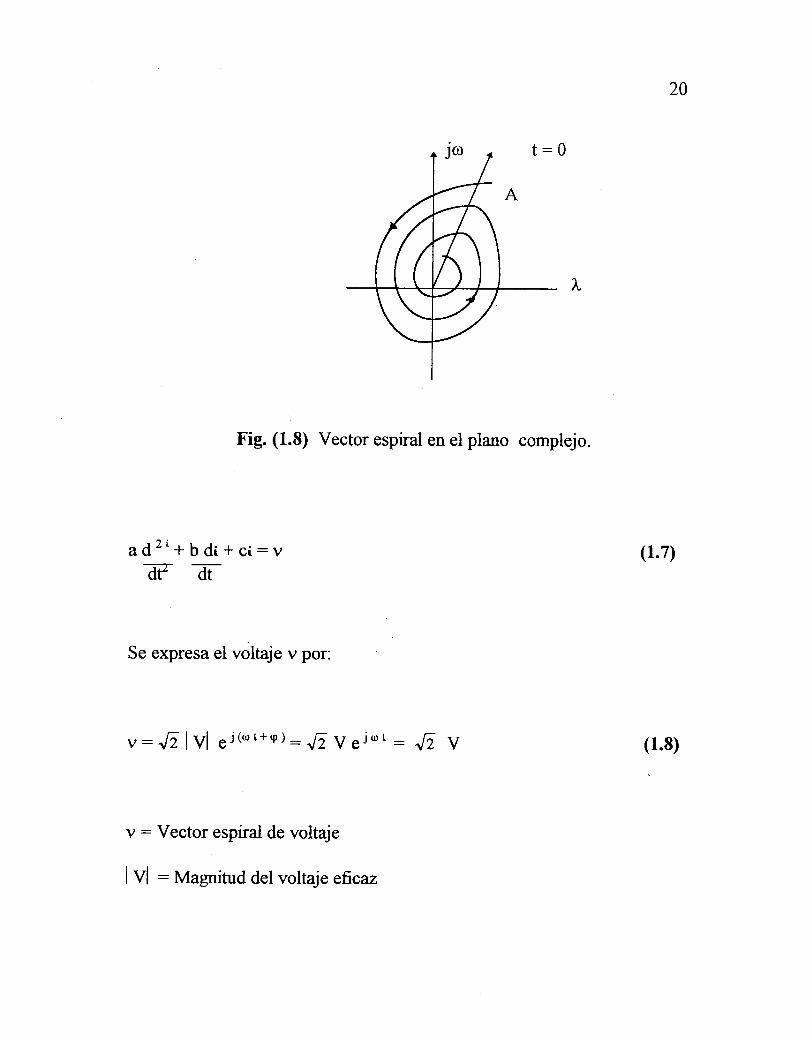
(1.6) Representa la solución general para la variable corriente si ü es
complejo, la ecuación 1.6 al variar el tiempo representa un espiral en el
plano complejo como se muestra en la figura (1.8). Se llamará a i el
vector espiral de corriente .
Se presenta a continuación la aplicación del vector espiral a la solución de
rma ecuación diferencial de segundo órden.
20
Fig. (1.8) Vector espiral en el plano complejo.
ad"'+bdi*ci:v--
-dr dt
Se expresa el voltaje v por:
v:Ji lVl ej(tot+*¡:Ji Vej't: J, V
v : Vector espiral de voltaje
I vl : Magnitud det voltaj e eficaz
(1.7)
(1.8)

21
o : Frecuencia angular
g : Angulo de desfase
V : Vector circular del voltaje
Con l, : 0 la ecuación l.ó representa un círculo en el plano complejo, a
éste vector espiral en adelante se le llamará vector circular, donde:
Y:4: V ept es unvector circular..12
v:lVl ei* esunfasor
De la ecuación 1.7 se llega a una solución de corriente expresada en
vector espiral.
Así:
i:AeDt
i.: Vector espiral de corriente
A: Constante
(1.e)
6: Frecuencia compleja
t : Tiempo
1.3.1 Para el Estado Estable
E:-)"+coj
Con l": 0 6: j c¡
Derivando la ecuación 1.9 en f,mción del tiempo
d 'i : Ajal s j't
dt
Comoi:AeJt'
Reemplazando i en 1.9.1 setiene:
d.' jcoi
dt
22
(1.e.1)
(r.e.2)

23
d2a: A(rrl)2sj't : fir)ti
,e
(1.e.3)
Retomando la ecuación 1.7 y reemplazando 1.8, I .9.2 y l.g.3 se obtiene:
a (lro)' i + bjali -r ca: J2 I V | . jort .Je
lafico)'+úr¡)b+c 1i:Ji lvl 4''.,*
Despejando i :
t: Ji lVl er(o,t+e)
a (tr¡)'+ 0r¡) b + c
Donde i: i,
ir: Corriente de estado estable
i,: Jt lvl s j('t+c) - Jz I e¡,. : Ji i (1.10)
- (D" a + c + jolb
1.3.2 Para el Estado Transitorio
Se deriva (1.9)

24
di : 6Ae6t
dt
d2i:62Aeüt
^d(
Como i: Aedt
Se reemplaza en (1.7) e igualando a cero:
a62+b6+c:0 (f.11)
(1.11) es la ecuación ca¡acterística de ésta. Se hallan dos raíces
características denotadas por 61 y ü.
La solución transitoria general es entonces:
it:Are6lt + Aoeu'' (r.r2)
La solución general entrada es:
t.[ -t5rt1
25
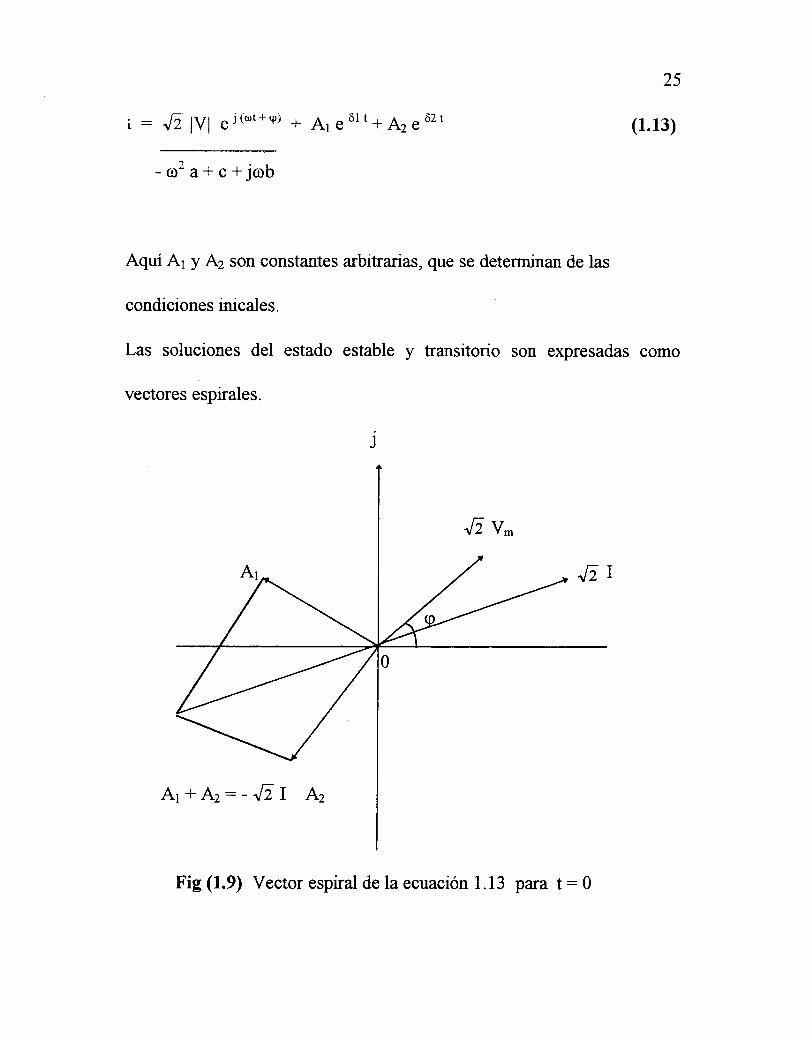
(1.13)i: Jtlvl sJ(a,t*q) + A,e8l,+Ao.ut,
-rtl'a+c+jrob
Aquí Ar y 4.2 son constantes arbitrarias, que se determinan de las
condiciones inicales.
Las soluciones del estado estable y transitorio son expresadas
vectores espirales.
J
r+Ae:-JtI
Fig (1.9) Vector espiral de la ecuación l.l3 para t:0

26
Esta figura muestra la ecuación 1.13 en el plano complejo; con
condiciones iniciales t: 0- i: 0.
Los dos estados, estable y fransitorio, pueden ser descritos como vectores
estacionarios en el plano complejo.
Así, cuando los estados variables son expresados como vectores espirales,
éstos estados pueden ser tratados de una manera rrnificada.
o Para la solución del estado estable:
p : d Se convierte en [jco ] V I es la integral.
dt
¡ Para la solución transitoria
p se conüerte en 6, 1 es su integral.
tEl estudio del vector espiral para circuitos eléctricos puede ser analizado
mas generalmente con la siguiente ecuación:
i = A(p) v (1.14)
J(D
B(p)

27
A(p)VB(p) polinomiosen p y v voltajedeentradaexpresado
por la ecuación 1.8 como vector espiral.
. La solución del estado estable de la ecuación f .i4 se obtiene con
p:j(l):
i,:A(jr¡) Jlvej'': A(jor) Jr ü (1.1s)
B (jar ) B (jor )
ZCA: B(iro)
A(jc¡)
ZCA: Es la impedancia CA en los terminales de entrada.
. La solución para el estado transitorio con:
B(p):O (1.16)
De aquí I .16 es la ecuación característica de la cual se hallan las
raíces, estas están denotadas por 6¡, ü, ............ 6 n
En este caso la ecuación hansitoria general de l.14 se expresa como:
it:Aredlt+ Aze62t + Ao edtt'
28
(1.17)
la forma más
circuitos y su
Aquí Ar , A'.2 ........ A,' son constantes arbitrarias, las cuales usualmente
son números complejos, determinado por las condiciones iniciales.
La solución general nueva es entregada por.
l.[-LS-r[t
i:A(jro ) Jilv I e j'1 -. Ar e 6rt + Are*t + ...... Ao€ 6",11.1g¡
Todos los términos de la solución son vectores espirales.
Esta solución general muestra que el vector espiral,
sencilla de expresión variable para escribir ecuaciones
solución.
CS
de
Cuando los coeficientes de la ecuación característica B (p) ecuación 1.16
son reales, sus raíces características son pares conjugadas complejas, sin
embargo cuando los coeficientes no son reales las raíces característic¿rs no
29
son pares conlugadas complejas.
Cuando la función v de la ecuación 1.14 es un vector espiral descrito por:
v:Jl lVl.u', 6:-}"+orj (1.19)
La solución general de la ecuación l.l4 es:
i : A(6)v -r.- Ar e6lt + A,.2e62t +...... + An.6ut (1.20)
B(6)
El primer término de est¿ ecuación no es el ténnino de estado estable-
pero es un vector espiral aquí se llamará de estado estable.
El circuito se denomina circuito de vector espiral de C.A
L.4 VECTOR ESPIRAL Y SUS VALORES REALES
CORRESPONDIENTES
La corriente i puede ser expresada de muchas maneras para nuestro
propósito por ejemplo, cuando i es una función coseno del tiempo se
puede escribir.
I lrrh.nld¡d Aulónoma d! 3ct¡d0nh II sEccloN B¡o1¡uiE';A I

i: Ji lIl Cos(art + rp)
30
(1.21)
La cuái puede tanbién ser designada como:
i:Re tJt lt I sj(ot+q)l: Re tJrlej', 1:R. lJtile.zz)
Donde Re I i ] Indica la parte real de i
I: lIl ere eselfasorde i.
También se puede denotar i como vector espiral:
t:Ji lllej(o,t+*¡:Ji i (1.23)
El corresponüente valor real instantáneo es:
ire: Re[i] (1.24)
En lo siguiente a no ser que se especifique, los estados variables se

3t
representarán por vectores espirales, se tiene:
i: Aeot 6:-^*Olj
Cuando i: 0 el vector circula¡ se representa así:
i: lrl.j(o¡t+q) - Iei.,
(1.2s)
(r.26)
Aquí I : I I I e r e es un fasor. Entonces se tiene la siguiente relación:
Irl: lil (r.27)
Cuando o : 0, i de de la ecuación 1.25 representa el estado transitorio
de D.C.
i - A e -rt.
Cuando 6: 0, es decir, 1": 0 y o : 0, i representa el estado estable
de D.C.
i:A-

32
Cuando t : 0 I de la ecuación 1.26 es iguai a la I de de fasor como
sigue:
í: ¡Ilrj(<ot+e; : ¡I¡.j
I: I I I siv fasor, entonces: I: i.
Así el vector espiral puede mosfiar, casi toda clase de estados variables
que aparecen en circuitos eléctricos.
1.5 DETERJVIINACION DEL VECTOR ESPIRAL
Para el vector espiral dado por la ecuación I.25, 6 eslaraíz
característica considerada por el circuito; o es la frecuencia angular de la
potencia dada.
En la ecuación 1.25
A: lAl e'*^

33
A es una constante compleja la cuál tienen dos paráms¡es, I A I y gA,
para deterrninar sus valores, se necesita dos condiciones. Por ejemplo con
condiciones iniciales para valores reales.
i: io y di : i; en t:0
di
_di : derivada de la corriente con respecto al tiempo.dt
De la ecuación I.24 y 1.25 con las anteriores condiciones se obtiene:
io:l Al ejcA et (-¡' + jú))(1.28)
Se deriva:
i i : di : I Al ej*A (-f + jco)et(-l' +jo)
dt
aplicando Euler en e i eA se tiene:
34
i o : lAlet(-1"+ j')
[(CosgA + jSengA)(-], + jar)l (l.Zg)
Evaluando en t : 0, y tomando la parte real de las soluciones de las
ecuaciones 1.28 y 1.29.
io:lAl CosgA
¡rio: -lAl [],CosgA + rrlSengA]
De la ecuación 1.30 y 1.31.
lAl : io
Cos gA
i, : - is (l"CosgA + arSenqA)
Cos gA
io: -io l"CosgA- ioro SencpA
Cos <pA Cos gA
io: -io¡, - iootangrpA
tanggA: - (iel, +i, )/ uoco
(1.30)
(1.31)
(r.32)
35
donde:
lAl: {iot +[ l/3(i s + ].r o)l']''' (1.33)
Así, A:lAler.pa ha sido deterrninado.
Ennotación de fasor I : I I I srv
Requiere dos condiciones iniciaies para la determinación de I I I V q.
1.6 TEORIA UNIFICADA PARA CIRCUITOS CA
El método del vector espiral puede ser usado para el análisis de circuitos
CA" de una manera unificada como se mosüó en el numeral 1.3, donde los
estados estable y transitorio, son expresados como vectores espirales.
El estudio de estado estable para circuitos Cd se realiza de forma rápida
con la notación de fasor, pero el an¿ilisis transitorio, no es determinado por
valores reales instantáneos; es aquí donde se ve la ventaja de el método
del vector espiral, que expresa los estados variables en función del tiempo.
La expresión de vector espiral para el estado estable de corriente CA es:

i: J, lf i .j(u,t+e¡ : jr lej'r: Jti
Donde i es el vector circular dado en la ecuación
espiral se obtiene la siguiente relación matemática:
a.l
dI:pI:jrrll (1.3s)
dt
JIdt: (1.36)
Aqui se utrliza p : jco para el análisis de estado estable en CA. En
muchos libros los autores, tienen dificultad en explicar adecuadamente las
ecuaciones 1.35 y 1.36, porque el fasor no es una función de tiempo.
Una ventaja de la notación fasor, es la facilidad para representar lo
anterior como un vector estacionario en el plano complejo.
Cuando el tiempo es cero, el vector circular I en la ecuación 1.34 queda
idéntico al fasor correspondiente, entonces el vector espiral puede ser
descrito como un vector estacionario en el plano complejo.
El estado transitorio puede también ser representado como un vector
estacionario en el plano complejo, con un tiempo igoal a cero.
36
(1.34)
1.26. Con el vector
fI
jot
2. APLICACION DEL VECTOR ESPIRAL A
CIRCUITOS DE C.A
2.1 ANALISIS DEL VECTOR ESPIRAL EN CIRCUITOS C.A
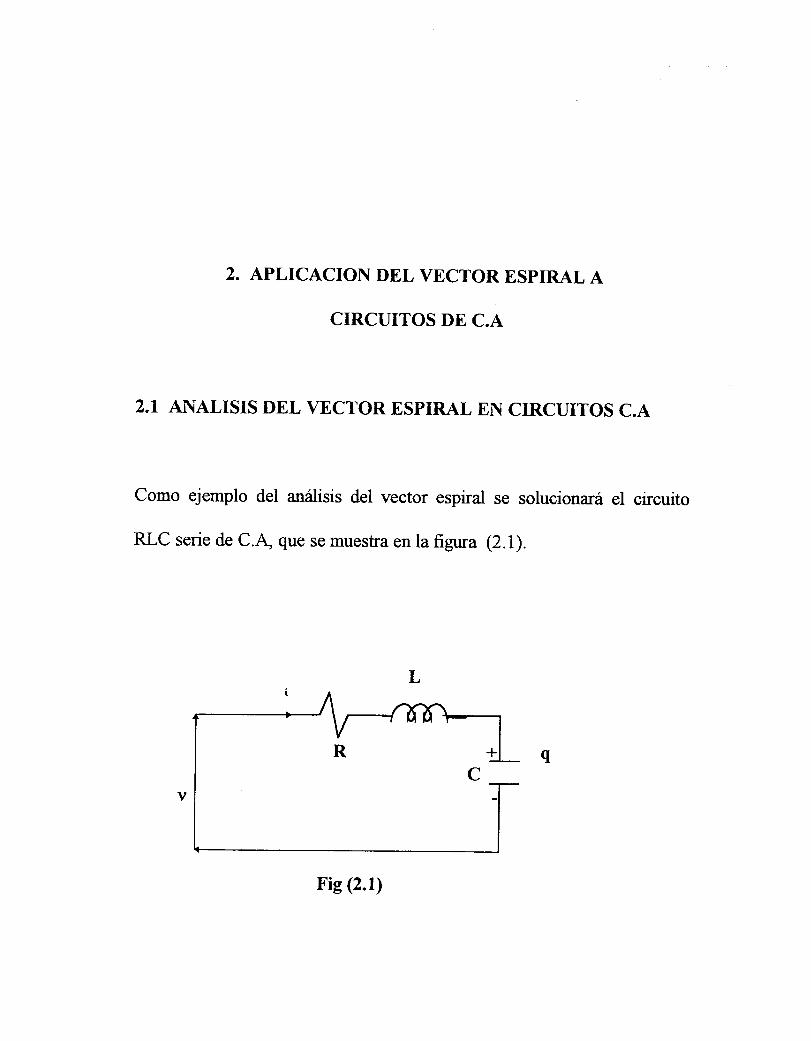
Como ejemplo del an¿ilisis del vector espiral se solucionará el circuito
RLC serie de C.d que se muesha en la fig*a Q.I).
Fig (2.r)

38
La ecuación del circuito en térrrinos de carga q del capacitor C se da
por:
L d'q + R dq +- q : v (2.r)
dt2 dt c
v es el voltaje eficán o rrns, en términales de enüada se denota como
vector espiral:
v: Jl lVl .j(ot+ q): Jii (2.2)
Reemplazando 2.2 en 2.1 y derivando respecto al tiempo se tiene:
L d'q +Rdq +q : j^Jilülr¡'' :jarJri e.3)
dCdtc
Puesto que dq / dt : i . La ecuación ca¡acterística para 2.3 es :

Lp"+ Rp+llc -0
39
(2.4)
Las raíces características son:
6r, 6 2 - -R I (R2- 4Ll c)'/' (2.s)
2L
Aquí, en el caso donde R2 - 4L I c ( 0, se tratarádos raíces complejas
conjugadas:
6r, 62- -cr tjp, c : Rl2L, B : (4Llc - Rt) (2.6)
La solución general de las ecuaciones 2.1 y 2.3 son:
g : Ar e6lt + Az e62t + li l" j(tot + q - e) (2.7)
i: dq: Ar 6re6tt + Aoüeu" * J-, lil .j(ot+c-e) (2.8)
J'
-Jú)
dt

40
Donde:
í": Jl lil.j(rot+P-e) (2.e)
Esta es la corriente de estado estable expresada como vector espiral. Para
hallarla se utiliza:
is: v : Jtlile¡t,t+e-o) (2.10)
z R+jrrrl-jlac
Donde 0 es el angulo de la impedancra.
Para encontrar las constantes A1 y A2 en las ecuaciones 2.7 y 2.8, se
uttitzn las condiciones iniciales que son:
i:0, q:0 en t:0 (2.rr)
tnsert¿índolas se tiene:
0 : (-cr * j 9)Ar + (- cr-j p)Ae + J, ltlej(q-e) (2.13)
Despejando: Como se muestra en el anexo I.
A1 :cr*jg+jro Jrlil ej(v-er (2.r4)
29.¡,
A2: -c¿ * jF -jco Jt lil.j(q-o) (2.1s)
29to
Reemplazando los valores de Ar y Ae en 2.7 y 2.8 se obtiene:
q : a+jB+j rJi li ¡ . : to t + e - 0) e' 4(-a+j 1-jlo)Ji I i | . - .. t¿r cF t + e 4)
0: Ar + AzJrlil ej(q-e)
2.oF
la ltlr '{¿14 ^i(o¡t+q-0)-r €;-'
Ja)
2aF
4l
(2.r2)
(2.16)
i : dq : (ü+jp + jro)(-G + jB) Jfli
2toF
I I I e (-a-jP)t ej(q-e)
dt
42
l.(-"+jP)t.j(e-e) +
+ Ji li t. j(ort + e-o)(-cr+j9-jr¡)Co-jF) Jt
2aF
(2.r7)
Las ecuaciones 2.16 y 2.17 son soluciones de carga (q) v de corriente
( I ), para las condiciones iniciales q: 0 i:0 en t:0.
Estas son expresadas como vectores espirales. Las soluciones son dadas
como valores reales instantáneos, que son dados por:
qre:Re Iq] ire:ReIi]
En este ejemplo se mostra¡á que las soluciones de estado estable y
transitorio son simultáneas, obteniendolas de una manera tnificada.
También se mosüa¡á que la solución del estado transitorio, es hallada más
v
43
facilmente en términos de vector espiral.
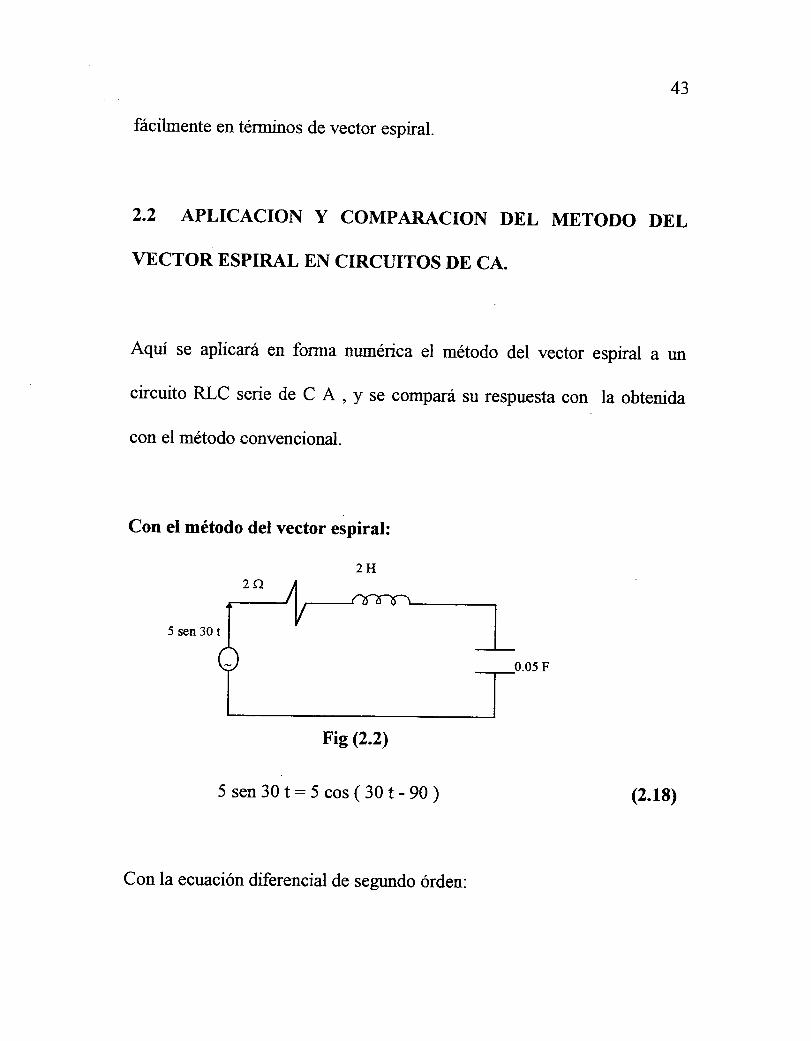
2.2 APLICACION Y COMPARACION DEL METODO DEL
VECTOR ESPIRAL EN CIRCUITOS DE CA.
Aquí se aplicará en forma numérica el método del vector espiral a un
circuito RLC serie de c A , y se compará su respuesta con la obtenida
con el método convencional.
Con el método del vector espiral:
5 sen 30
5sen30t:5cos(301-90) (2.18)
Fig (2.2)
Con la ecuación diferencial de segundo órden:

L d2 q + R dq + q: v
dtz dt c
Se expresa el voltaje en vector espiral
V:5cos(30 1-90):5sj(rot-lol - y
L d2 q + R dq + q:5ej(3ot-eo)
dt2 dt c
Lp'+ Rp *-L:0c
2p' + 5 p +_l_: 0
0.05
Se hallan las raíces:
44
(2.te)
(2.20 )
Q.2r)
(2.22)
6r: -1.25 + 2.9 j (2.23)

6z: -1.25 - 2.9 j
cr, - 1.25, p :2.9 j
Se obtiene el valor de la corriente de estado estable con:
is: lül ,j(rot+e¡
R+roLj-jlrcoc
No se incluye J, puesto que el valor
entrad4 ya está dada en valores máximos.
de voltaje en terminales de
45
(2.24)
v-
z
is:5ej(3ot-90) : 5 ej(3ot-90)
5 + j60-j0.666
ir:8.39 x l0-2 l-SS.S sj(3ot-eo) : 8.39 x 10 -2 s
j(rot-eo-85.18)
is : 8.39 x lO-2 sj(:ot-175'18)
a
lIl:8,39x l0-2
(2.2s)
q: Alet(-1.2j+2.9J) + Azet(-1.2j -z.ei) _r
i: d q:A r (- 1.25 +2.9j) e t(-r.25 + z.ei) +Az (-
dt
+ 8.39 x 70-2sj(rot-175.18)
Se hallan las constantes A 1
t : 0. y se reemplazan en
46
8.39 x l0-2 s j(:ot-175.18)
j30 (2.26)
1.25 - 2.9j) et(- 1'2s -2'ei)
(2.27)
y Az, con condiciones iniciales: i: 0, q:0
2.26 y en 2.27 .
0 :Ar * Az * 8.39 x l0-2 ej(-175.18)
j30
(2.28)
x l0-2ej(-175.18)
(2.2e)
0: (_ 1.25 + 2gj)Ar+Gr.2s - 2.9j) Ae + 8.39
Donde:
Ar:1r5 +2.qj +30j2 (2.e) (30)
x 8.39 x I0-2 ej(-l7s.18)
47
(2.30)Ar: 1.587 x10-2
Az:1.308 x l0-2
Reemplazando (2.30) y (2.31) en la ecuación (2.27):
i - (1.587 x l0-2 f 87.36 ) (3 ls7 113.31 ).'(
-t'zs +
(1.308 x l0-2 rc ) (3 157 l-tt3.3l).'(-tzs -z'gi) +
l0-2sj(rot-175.18)
Tomando la parte real se obtiene:
(2.3r)
2.ej) +
8.39 x
(2.32)
i - 5 x l0 '2 e- r'25t cos (2.9t + 25.96) +4.129 x
(-2.9 t-38.13)+ 8.39 x tO'2 cos (30t- 175.18)
l0-2 e-r.2.5, cos
(2.33)
Con el método convencional:
-267.82

48
Utilizando el circuito de la f,g (2.2) con valores de: R : 5 f), L:2H,
C:0.05F y con V=5sen3Ot seobtiene:
-5 sen 30t + 5í+ 2dildt + [1/0.05Jr, idt + Vc(to)]:0
5di+ 2dzi + 1 i: 150cos30t (2.34)
dt dtz c
Para hallar i s (corriente estable), se sustituye la fuente por un corto
circuito así:
2dzi +5di+ 1i :0 (2.3s)
dtz dt c
dzt +5 dt+ I i:0ÁT 2 dt 2(oJ5)
62+2.5 6+10 -0 (2.36)

49
Luego se halla
c¿- R :
( cr, co o.) para saber a que caso pertenece.
5
2L (2) (2)
cr, - 1.25 s-r
a: coeficiente de amortiguamiento exponencial ( 5 -')
(Do:
Jt" J(2Xo05)
oro: Frecuencia de resonancia ( rad / s )
(D o : 3.162 rad /s
Como: Oo ) 6r essubamortiguado.
Luego se halla las raíces:
6t,z: -c[ *
6r : -1.25 +
(2.37)
(2.38)
Urivrrsidad Ar¡tdnom¡ de 0ccljr¡hstcc¡oN 8r8Lt0¡icA
Qzr 'z
(2.3e)
6r : -1.25 + 2.9 j
6z : -1.25 - 2.9 j
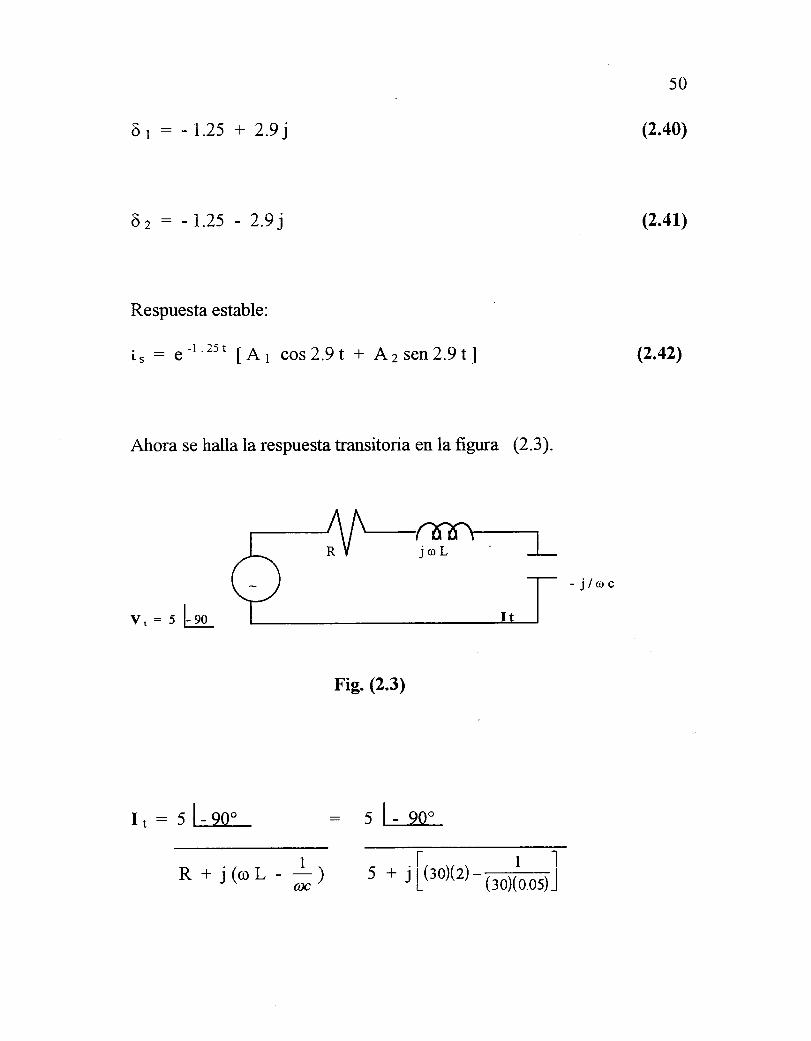
Respuesta estable:
is: €-t'zst [Ar cos2.9t + AzS€n2.9t]
Ahora se halla la respuest¿ ffansitoria en ia figura (2.3).
t,: , l-no
Fig. (2.3)
It : s l-oo" 5l-oo"
50
(2.40)
(2.41)
(2.42)
- j/cuc
1
- -)CDC
.R+j(oL - .1 . r I5 + j ¡(roXz)-Go-(r_rl
51
It: sl-qo' : s I -qo'
5 + 59.3j
rt:0.0841 -tts - 18"
i1:0.084 cos (30 1 - 175.18") (2.43)
La respuesta completa es:
I - ts T lt Q.44)
i : e-r'zst [A1 cos 2.9t+A2sen2.9t]+0.084cos(30t -175J8.)
(2.4s)
Conlascondicionesiniciales i (0) :0, Vc (0):0 y t :0 se
hallan las constantes así:
i(0): Ar + 0.084cos(-1.75 -18 ¡:9 (2.46)
A 1 : 0.0837
52
(2.47)
: di /dt: -1.25 e-r'25t (A1cos 2.9t + 'A.2 sen 2.gt) + e-1.25t
(-2.9A 1 sen 2.9 t + 2.9 A2 cos 2.9 t) - 00.84 x 30 sen(30 t -175.18.)(2.48)
Si t: 0 se tiene:
i' : - I .25 At + 2.9 A2 - 0.084 x 30 sen (- 175.19" ) (2.4e)
Aplicando L.V.K. al circuito de la figura (2.2) se llega a:
- 5sen 30t + 5i + 2i' * Vc:0 (2.s0)
Si t:0
-5 i(0) + 2 i',(0) + Vc(0) :0 (2.51)
Yaque i'(0):0 entonces (2.49) es:
- 1.25Ar + 2.9 Az + 0.21I : 0
53
(2.52\
Reemplazando (2.47 ) se obtiene:
(- r.2s ) ( 0.0837 )
Az: -0.0366
+ 2.9 Az + 0.211 : 0
(2.s3)
Luego se halla la respuesta completa sustituyendo (2.47) y (2.53) en
ia ecuación (2.45), se obtiene:
i(t) - e-r'25t[0.0837cos2.9t - 0.0366sen2.9t| + 0.084cos(30t-
175.18') (2.s4)
Comparando las respuestas matemáticas de los métodos (vector espiral y
convencional) se nota que la respuesta de corriente estable, es igual en
anbos casos, pero los términos en la respuesta transitoria no lo son.
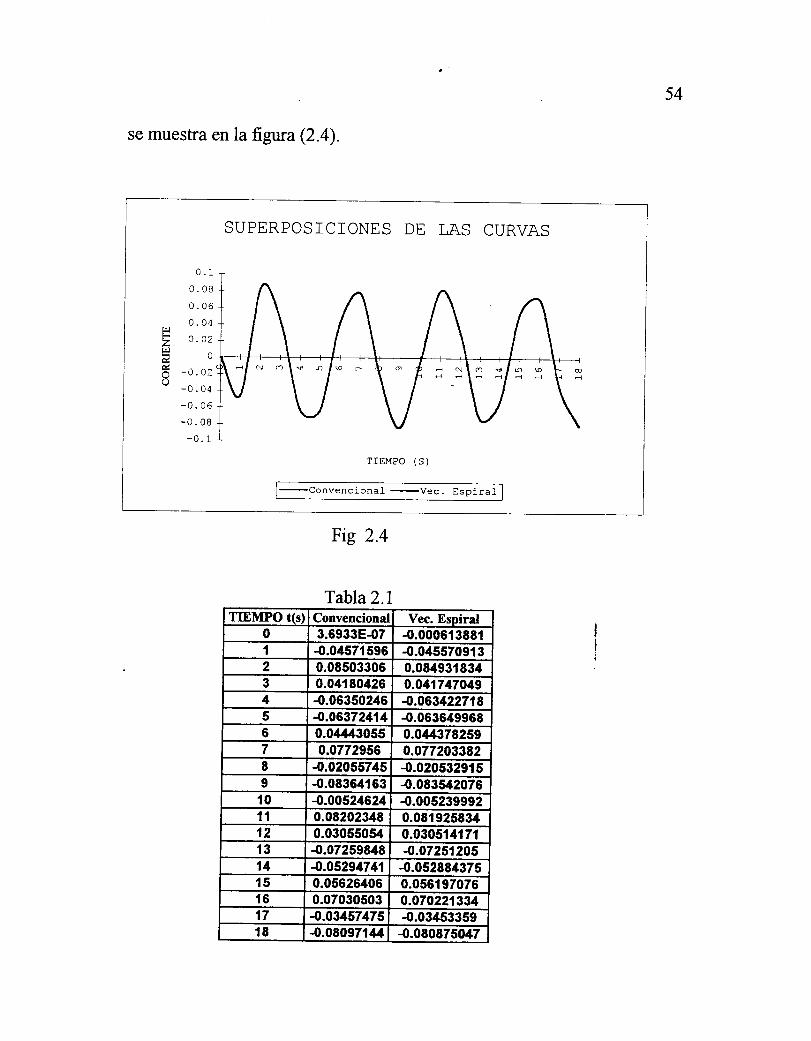
Cuando se hace la simulación en las dos respuestas completas se observa
que el comportamiento de las curvas resultantes son iguales como
54
se muestra en la figura (2.4).
SUPERPOSTCIONES DE LAS CURVAS
0. 08
0. 06
0. 04
o .02
0
-0.02-0. 04
-0.08
Í¡2
Q
TIEMPO
-Convencionaf -Vec.
Esplral
Fis 2.4
Tabla2.7TIEMPO t(s) Convencional Vec. Esniral
0 3.6933E{7 -0.0006138E11 {r.04571s96 {t.0455709132 0.08503306 0.0E49318343 0.04180426 0.0117470194 {,.06350246 4.0631227185 4.06372114 {r.0636499686 0.04443055 0.0¡f43782597 0.0772956 0.0772033E2E {.020557¿[5 -0.0205329159 {1.0836¡1163 {r.0E3542076l0 -0.0052462¡l {t.00523999211 0.08202348 0.08f92583412 0.03055{¡&t 0.03051117113 {t.07259E4E 4.0725120511 4.05291711 {l.05288/875t5 0.05626406 0.056197076l6 0.07030503 0.07022133417 -{¡.03457475 {t.03453359t8 {1.080971¿14 {1.0E0E750¡17
55
En la solución del circuito de la figura (2.2) se puede ver que con el
método del vector espiral se obtiene: una respuesta más complet4 por
que proporciona la parte real y la imaginaria, aunque esta última no se
toma en cuenta. También se halla en menor tiempo y más fácilmente.
3. VECTOR ESPIRAL EN EL MOTOR DE INDUCCION
Se escogió este tipo de motor por ser el más usado en la industria, debido
fundamentalmente a su estructura simple y robusta, bajo costo relativo y
sencillo mantenimiento.
3.1 ECUACIONES FUNDAMENTALES PARA LOS MOTORES
DE C.A
Los motores de C.A tienen muchas bobinas en su interior. En los motores
trifasicos el primario tiene bobinas trifásicas, y el secundario tiene por lo
menos tres. Estas bobinas tienen reactancia e inductancia- como muestra
la figwa (3.1).
57
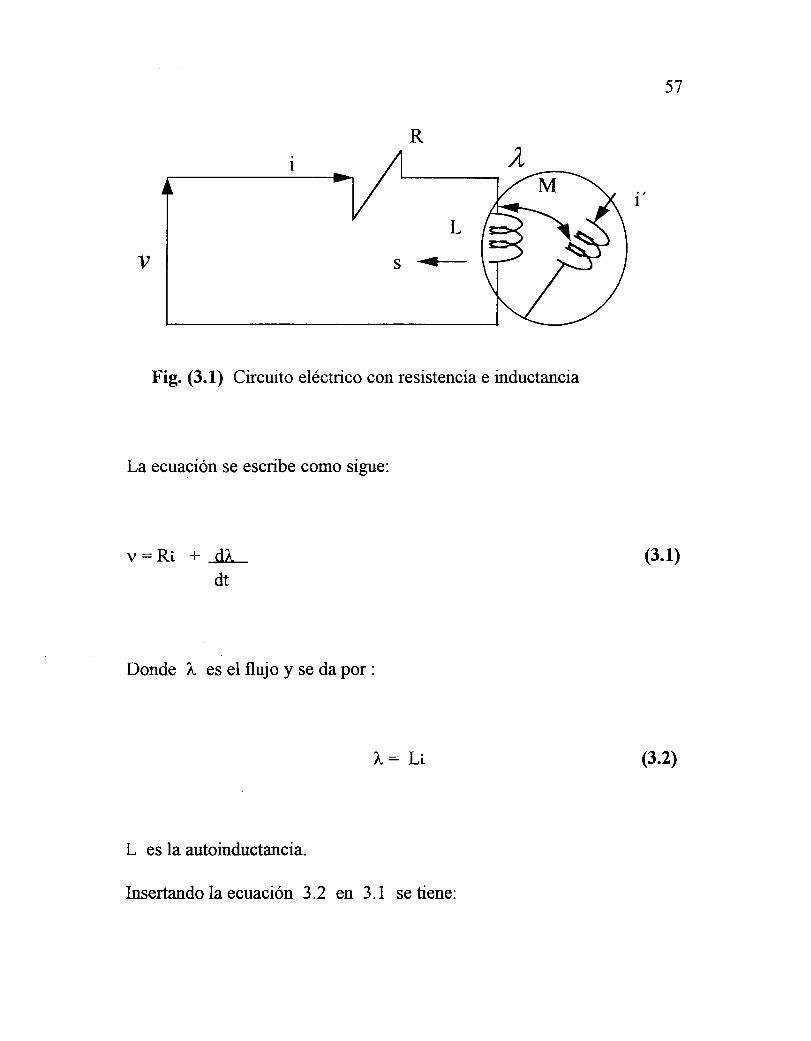
Fig. (3.1) Circuito eléctrico con resistencia e inductancia
La ecuación se escribe como sigue.
v:Rt + dl"
dt
Donde l. es el flujo y se da por :
l": Lt
L es la autoinductancia.
Insertando la ecuación 3.2 en 3.1 se tiene.
(3.1)
Q.2)

v:Ri+L di +a-
: Ri + L di/dt
dL dxrTai dLldx S
58
(3.3)
Aquí el tercer término es la velocidad del voltaje, la que es proporcional a
la velocidad del embobinado en la coordenada X, cuando hay otro
embobinado o bobina por lacual fluye corriente (i') cerca a la anterior, se
puede decir que estan electricamente acopladas formando una inductancia
mutua, representada por M. Donde l" de la ecuación 3.2 es:
X: L i + Mi' (3.4)
Y la ecuación 3.3 es:
v:Ri + d (Li)+ d (lvfi') (3.s)
dtdt
59
Cuando hay más embobinados, hay más términos correspondientes en la
ecuación 3.5. La ecuación 3.1 es la frurdamental de las máquinas
eléctricas, y €S válida para cualquier expresión, incluyendo el vector
espiral.
3.2 ECUACION DEL CIRCUITO DEL MOTOR DE INDUCCION
METODO DE SEPARACION DE FASES
Va
\''
IP
a
i"lc
lr_ r
vb
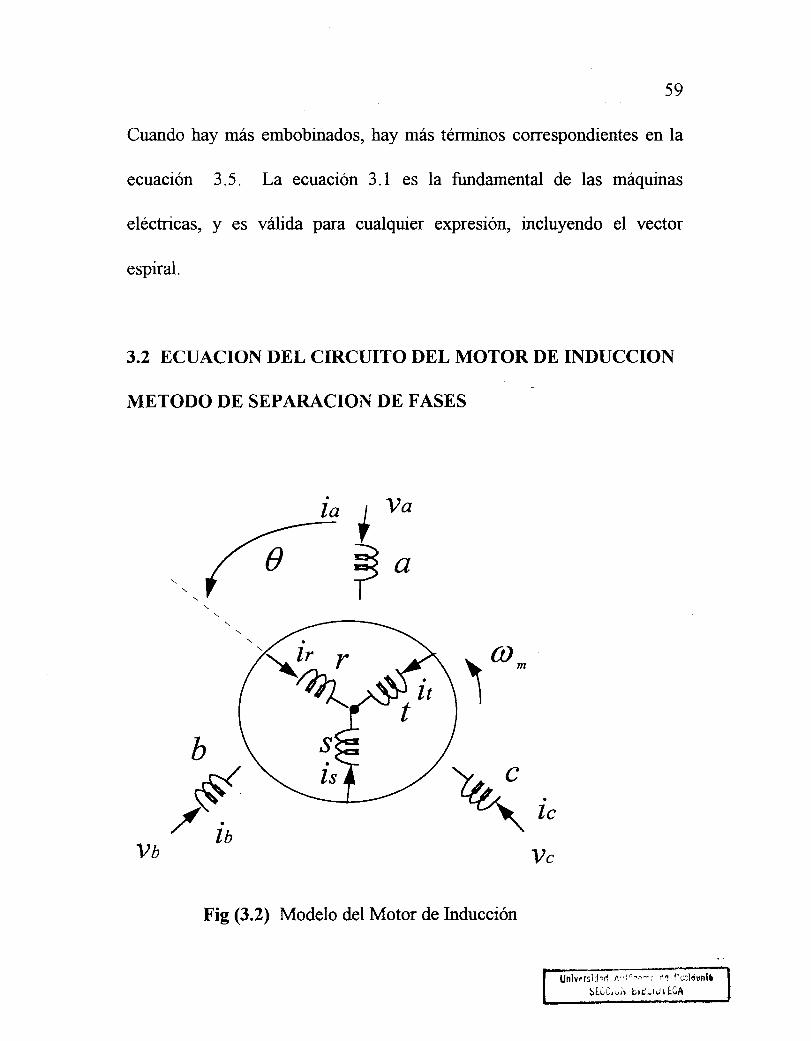
Fig (3.2) Modelo del Motor de Inducción
60
La figura (3.2) muestra un modelo para el análisis del motor de
inducción. Aquí se analizará el motor de inducción trifásico.
En el primario o en el estator hay tres fases de embobinado, y en el
secunda¡io o lado del rotor también hay tres fases de embobinado.
Aunque estan dibujadas como cenüadas, las bobinas estan insertadas en
ramras distribuidas en la superficie cilíndrica del estator y del rotor, es
decir que el enhehierro es r¡niforme despreciando este efecto.
Las fases del estator son idénticas y desfasadas 120" eléctricos al igual
que las del rotor.
Cuando el motor es de jaula, donde se encuentran los a¡rollemientos el
número de las fases secundarios es más de tres. Pero se representa por el
equivalente en la frg. (3.2).
La autoinductancia del primario y el secundario son representadas por L I
y L z, estas se pueden diüdir en dos pates:

L1 : lt + M, Lz: i2 + M
61
(3.6)
Aquí11 y lz sonlas inductancias delprimario y del secundado, yM es
el máximo valor de la inductancia mutua entre el primario y el secundario.
Si e es la distancia ente la t-ase
inductancia mutua entre ellos es:
a y la fase Í, entonces la
Mcos 0 (3.7)
La cual corroga que el c¿rmpo magnético en el entrehierro es senosoidal.
Donde e se expresa en radianes eléctricos. Cuando la relación es en
radianes mecánicos se tiene:
0:lzP0mec P: número de polos (3.8)
Aplicando la ecuación 3.1 para la fase a:

Va: Rti, + dlu
62
(3.e)
El flujo mutuo ¡. a puede diüdirse en dos partes:
lu: lr iu * L ru : l": li (3.10)
Donde, el primer término es el flujo que circula en el primario, y l. , u es
el flujo mufuo que úa en el entrehierro, que es donde se encuentra el
mayor flujo, ya que aqui se produce la conversión de la energía.
Sustituyendo la ecuación 3.10 en la ecuación 3.9 se tiene:
Vu: Rl ia + llpiu + P leu
dt
Pa¡a la fase r
p: d
dt
(3.11)
0 : Rz í, * lzPa, + p lg, (3.r2)
63
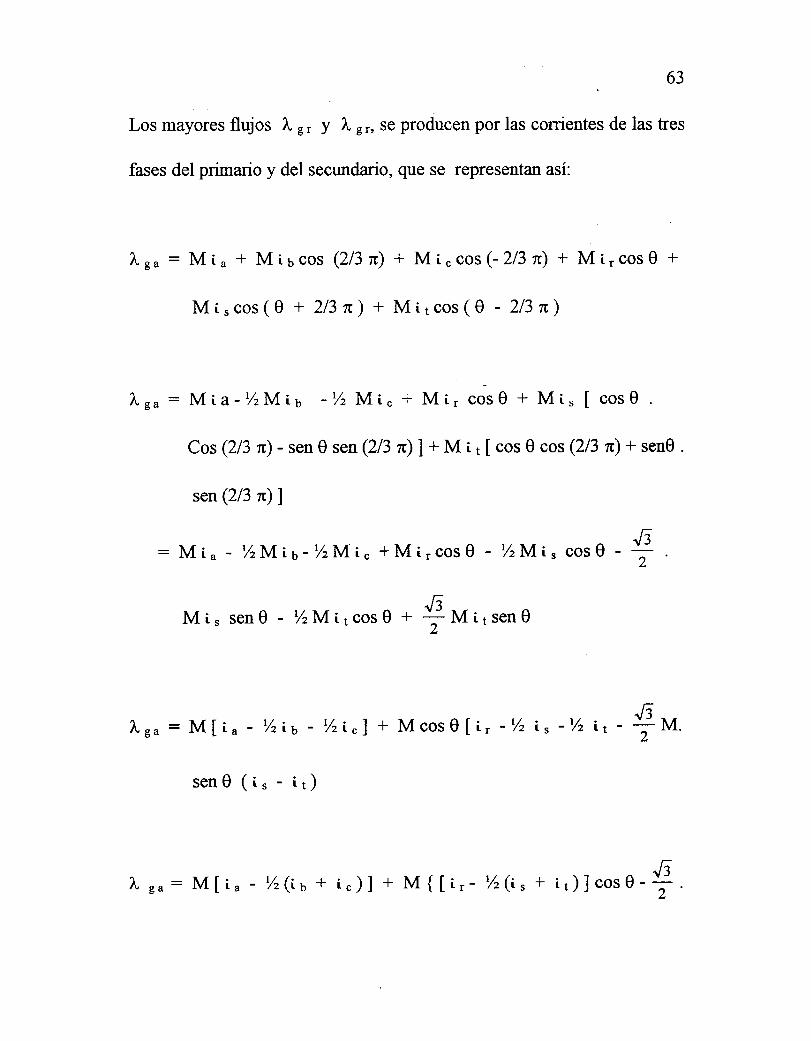
Los mayores flujos l" g, y I g r, S€ producen por las corrientes de las fres
fases del primario y del secundario, que se representan así.
lgu: Miu + Mt6coS (213n) + Miccos(-213 n) + Mi,cos0 +
M i , cos ( 0 + 213 TE) + M i t cos ( 0 - 213 n)
Isu : Mia -YzMi6 -y, M-i. * Mi, cos0 + Mi, I cos0
Cos (213 r) - sen 0 sen (213 n)l + M i 1 [ cos 0 cos (213 n)* senO .
sen (2/3 n) l
: M íu - YrMi¡ -%Mic +Mircos g - Y2Mi, cos0 - +L
^tiMi, senO - YrMilcoSe * ;Mitsen0
Isu : MIi u - yr.t - Y'i.] + Mcos0 [i, 'Yz i" -Y2,, - *fuf.2
sen0 (ir - i,)
L ,u: MIi" - %(io * i")] + M{ t i,- Yr(i, + 11)lcose-+.

(¿, - i1)sen0)
le, = Mi. + Mis cos(213n)
+Mi6coS(-e+213n)
64
(3.13)
+ Mi1 coS (-213 n)+Miacos Ge)
* i"cos(-e -2/3n)
Siguiendo el procedimiento anterior se llega a:
Le,: MIi ,-yr(i, + it)] + M{ t íu-Yr(io + t.)lcose *+
(io-i")senO) (3.14)
En operación de estado estable las corrientes trifasicas son simétricas y se
pueden representar con vectores espirales, que en éste caso son vectores
circula¡es.
ib: Jtlirl sj(''t +q,)
ib : Jl lirl ejtor t+ ev -2t3tc)
- to Ii. : Jl ll, I ej(or t+ et + a37c)
(3.1s)

í,: Ji I I, lej(', t+ez )
ej(tr 1+92 -2/3tc)
e j(t, ¡ + 9z + 2137r,)
65
t;L5 - rúZ b (3.16)
í, : "12
12
Aqui ro1 y 0J2 son las frecuencias angulares del primario y secundario
respectiv¿mente, son diferentes entre ellas; ya que las corrientes trifiísicas
en las ecuaciones 3.15 y 3.16 son simétricas y vectores espirales, se
tiene:
iu * iU * i":0 ir + ir* it: 0 (3.r7)
Entonces:
rc - - t¿ - Lb
i": -J, li, lf ej(', 1+er ) + ej(ar, t+e, -uttc)¡

la lfrb-rc- 1z lrl
,a:.!2 llrl
t': Jz lIr
l': "lz llr
lo: ^lz lIr
Jt lrrl e jto' t + e' )ir - i": -j.Jj
:llrb - Lc - -J1J 1¿
66
Igj(., ¡+er - 2/3 x)+gj(or t+ cr )+ej(r, ¡+ er -213n)
12 ej(cot t + 91 -2t3tc) + ej(.t . + vr ) 1
I lZ"j(orr t + er ) 9 -jztt' + e j(ol t+ er )l
{ ejtco, t+ vr ) ¡ 2(-%-j+). I I }
ej('t 1+er, {_j16;
(3.18)
De igual forma:
: l.ts - lt - -J 1J 1¡ (3.1e)

67
Sustituyendo las ecuaciones 3.17 y 3.18 en las ecuaciones 3.13 y
3.14 se obtiene:
Lsu : MIi u -Yr,(iu + i.) + M{i, -y'(i, + i1)]cos0
-%J1(i,-i)sen0)
L su: M Ii u*Y, i u ] + M { t í,*Yz ir cos g -Y2l6 (- j J3) sen 0 }
Ieu: 3l2M. iu * M{[312 ir cose] + i 312 i, senO]
Xsu= 312 Illdi" * 312 iv,4i, (cos0 + j senO)
Len 312 Mriu * 312 ly'ri, sjo (3.20)
De igual forma :
Is, : 312 }y'ra, + 312 Mius-je (3.21)
68
Al reemplazar las ecuaciones 3.20 y 3.21 en las ecuaciones 3.11 y
3.12, se tiene:
Va:Rriu*lrpiu +312Mlpiu*p(i.ejt)] (3.22)
Para (3.12) .
0:Rzír* lzPir*PLrr'. como p:d/dt
0 : Rz i. * lzp i. * d ldt(3l}Mi, +3l}Miu e-je;
0: Rzi,* lzpi,+ 3l2Mdi,ldt+ dldt(Irdi" e-je)
0 : R zí,*lzpi r+312 Mdi rldt + M[i" d/dt(e-jt) +e-jtd./dt1
0 : R.2i.*lzpi.* 3/2 MIpi. * 3/2Mr[i"(-i)e-je de/dt+.-jtp,u]
0 : R zí, t lzpi, + 312 Mpi, + 3/2 Me-ro[-i ujol- +piu]
0: Rzi,* lzpi,+ 3l2MIpi, + (piu).-jt-jrniae-je1 (3.23)
Aquí or - es la velocidad angula¡ del motor, dada por:
(Dm: d$/dt:pe [rad S-t] (3.24',)

69
Multiplicando la ecuación 3.23poreje setiene:
0 : Rz.reje + lz p..eje + 3l2Mpirej0 + 3l2Mpi^e -jt e is -j312
Mc,r*iug-'ie eje
0 : Rzi,sje+(12 + 3l2M)(pi,)",t +312 M(p-jor-)i" (3.25)
Reemplazando:
ir: irejo: irgjt-t (3.26)
Entonces:
pi; : (pi.). jt
pi; : (pi,s je +
Pi , : (Pir)""
* irp(ejt-t)
jco* i.g jt-t
+jcrl-i, (s.27)
Univrrs;Ja'! t,, lFt,:¡;.t cl i'icit¡trtlSL"LI¡|{ UtBLtOt¿CA

0:
0-
Sustituyendo las ecuaciones
lo siguiente:
3.26 y 3.27 en 3.22 v 3.23
70
se plantea
na: Rriu + (lr + 3l2}il) piu + 312 Mpi. (3.28)
Rzi, + (1, + 3/2 M)(pi; - júD-i,) * 3l2ll/r(p - jar-)iu
Rz i, +0, + 3l2fr4(p-j or-) i, +312M(p-j r¡.) i" (3.2g)
Se nota que el voltaje y la corriente en las ecuaciones anteriores son de
las fases t y r, las ofras fases del primario y secundario no se tienen en
cuenta. Las fases a y r son separadas de las otras, a la que se le llama
separación de fases, esto quiere decir que solamente se tiene en cuenta
una de las tres fases, y con esto es suficiente para escribir la ecuación del
motor trifásico.
Las ecuaciones 3.28 y 3.29 son válidas tanto para las operaciones en
estado estable como en transitorio, lo que se mostrará en el capítulo 4.
Con el fin de que la fase a representa al primario, y la fase r representa

7l
alsecundario, a y r secambian a I y 2 respectivamente,entonceslas
ecuaciones 3.28 v 3.29 üenen a ser:
D1: Rrir + (lr + 312 M) pi, + 312 Mpi, (3.30)
0: Rzíz+(12 +312 M) (p-jar-) .z+312M(p-jar*)t, (3.31)
Aquí i z : í , de la ecuación 3.26, la frecuencia secundaria es
(D - * oJ z : (D t, donde es igual a la frecuencia suministada por la red
a. La derivada en fimción del tiempo p, üene a ser j ro.
Astrmiendo que el motor es de dos polos, para deducir las ecuaciones. La
velocidad sincrónica es :
ro : (D[rads-t] :2ra,lP [rads-t] (3.32)
Las ecuaciones 3.30 v 3.31 se escriben como:
rJl :Rrir +jro(11 + 3l2M)i, + 3l2jroMi2 (3.33)
72
Para la 3.3i:
0 : Rziz -r (lz + 3l2l;.4) (p-jar,n)i, + 3l2}/r (p -jo'o)ir
0 : Rzíz-r j(lz + 3l2M) (ro - ú)m)i, + j3l}M(ar - o^)ir
Dadoque s: (D - (Dm , semultipiicapor o ysediüdepor so
entonces:
0: Rzizls+ j(lz + 3l2}l{)oi, +j3l2co Mi1
0:3l2jroMi1 + Rzizls+ jr¡(lz + 3l2M)t2 (3.34)
Donde s es el deslizarniento
s: o-(Dm (3.3s)
Las ecuaciones 3.33 y 3.34 son las ecuaciones del circuito de los
73
motores de inducción en estado estable. Sólo son válidos cuando son
expresados como vectores espirales, los que en este caso son vectores
circtilares, al reemplazar los vectores espirales con sus correspondientes
vectores circulares se tiene:
ú,
0
: Rrir + j(Xr + X-)i1 + jX,,i2aao:j-X.Ir +RzlsIz +j(Xz+ X-)Iz
(3.36)
(3.37)
Las reactancias son:
X1 : o)ll, Xz : alz, X- : 3/2 aM (3.38)
Donde X 1 es la reactancia del primario, x 2 la reactancia del
secundario, y X - es la reactancia de exitación. Estas ecuaciones son
aparentemente las mismas ecuaciones expresadas en fasores, es decir que
el método del vector espiral es compatible con el fasorial, se deberá
recordar que el método del vector espiral o vector circular, es una fi¡nción
del tiempo mientras que el de fasor no lo es.
74
R2/s
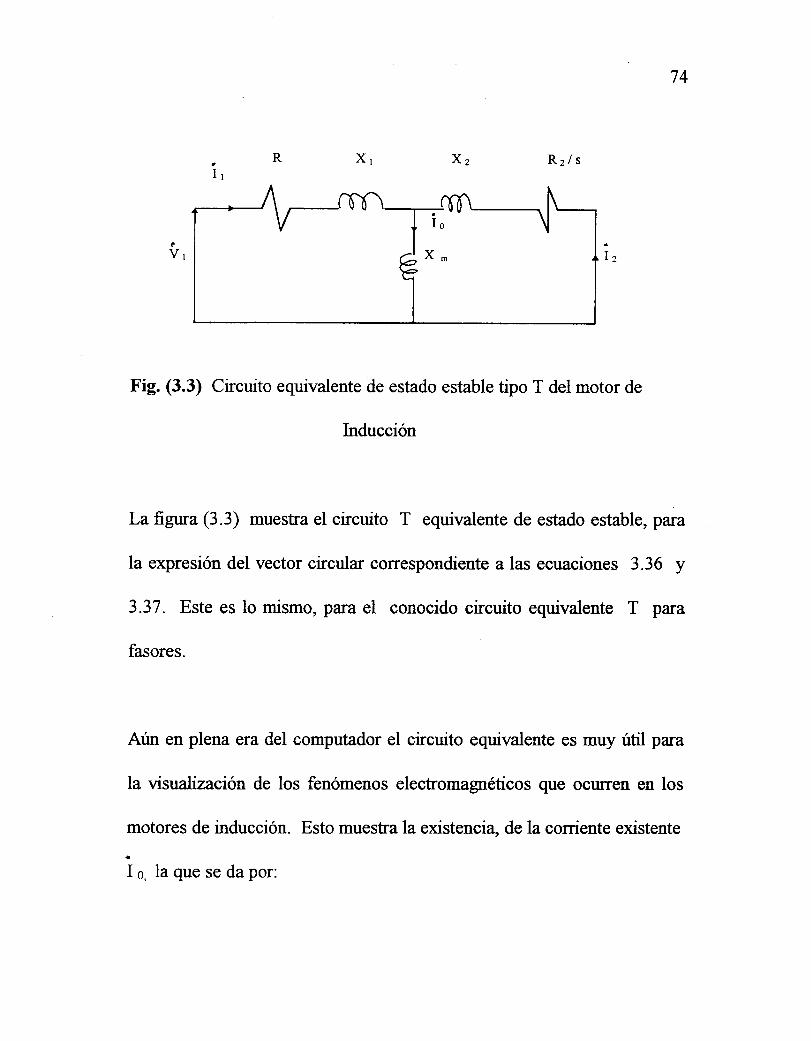
Fig. (3.3) Circuito eqüvalente de estado estable tipo T del motor de
lnducción
La figwa (3.3) muestra el circuito T equivalente de estado estable, para
la expresión del vector circular corespondiente a las ecuaciones 3.36 y
3.37 . Este es lo mismo, para el conocido circuito equivalente T para
fasores.
Aún en plena era del computador el circuito equivalente es muy útil para
la üsualización de los fenómenos electromagnéticos que ocrrren en los
motores de inducción. Esto muestra la existenci4 de la corriente existente
I o, la que se da por:
eeo
Io : I r ¡ Iz
75
(3.3e)
Las corrientes excitantes juegan un papel muy importante en el control y
análisis del motor de inducción.
En el circuito equivalente de la figura (3.3) no hay resistencia en paralelo
con la reactancia de exitación X -, esto es debido a que las pérdidas en
el hierro son despreciables en vacío. El error debido a ésto es muy
pequeño, sinembargo si se necesita una resistencia que exprese las
pérdidas en vacío del hierro, esta resistencia se puede colocar en los
terminales de entrada del circuito.
3.3 ANALISIS EN ESTADO ESTABLE DEL MOTOR DE
II{DUCCION
En el procedimiento de esta sección, las ecuaciones del circuito y el
circuito equivalente tipo T fueron halladas para la operación de estado
estable del motor de inducción. Su rigurosa derivación matemática aquí
76
ha sido poco tenida en cuenta. Las características del estado estable del
motor de inducción, se han esfudiado suficientemente en textos anteriores;
como ya es conocido este análisis no se repitirá, pero se dará un resúmen.
El circuito equivalente de tipo T da las siguientes ecuaciones, para
voltaje y corriente en el motor de inducción.
T_rl
tr-L2 -
Io:
(3.40)
[Rr + j(Xr * X-)] + X*'
lRz/s + j(Xz + X-)l
-jX.Vt (3.41)
[Rr + j(Xr + X-)] [Rz/s + j (Xz + X.)] + X.'
Vr(P.z/s + jXz) (3.42)
IRr + j(Xr + X. )] [Rz/s + j(X, + X-)]+X-'
ú,
Io: 11 + 12 (3.43)
77
Las pérdidas en el cobre en el secr¡ndario son:
P":3Rz llrl'
La salida secundada al enfrehierro del circuito
entrehierro expresada como:
(3.44)
potencia del
Pz:3 R2s
J,l' (3.4s)
De las ecuaciones 3.44 y 3.45 se tiene, las perdidas
son:
en el cobre que
P": sP2 (3.46)
La potencia de salida comunmente llamada potencia mecánica es dada
por:
es la
Po: Pz-P" (3.47)

78
(3.48)Po: 3Rz (1-s) llzl'
La velocidad angula¡ del motor es:
Aquí: P es el número de los polos
en radianes eléctricos/segundos.
El torque del motor se dá por:
:Pn:3lz p R. lirlt [Nm]:ú)m s(D
:Pz[syn W]
com :2(1 - s) ro Irads-1 ] (3.49)
y o es la frecuencia angular expresada
3 Rr lirl'[syn w]S
(3.s0)
El torque del motor expresado en sincronos watts I sfn W ] , es igual al
producido en la salida del motor con velocidad sincrónic4 es decir a la
potencia de salida del secundario.
79
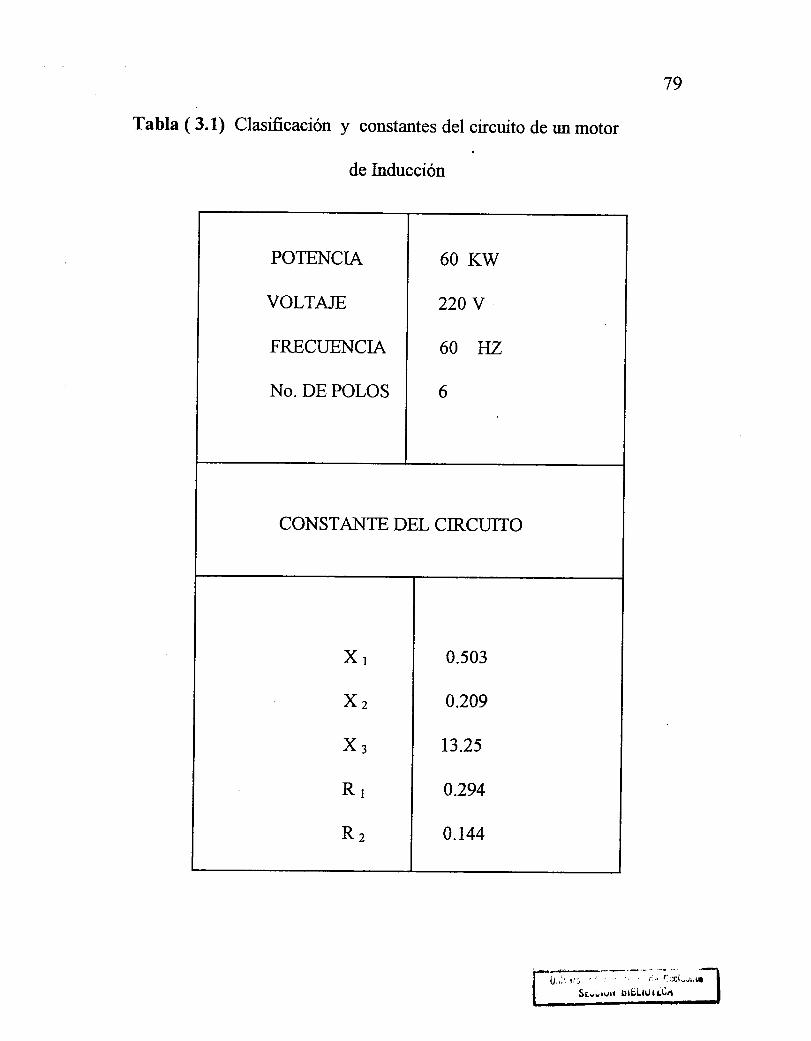
Tabla ( 3.1) clasificación y constantes del circuito de un motor
de Inducción
POTENCIA
VOLTAJE
FRECUENCIA
No. DE POLOS
60 KW
220 V
60 HZ
6
CONSTANTE DEL CIRCUTTO
X1
Xz
X¡
R1
Rz
0.503
0.209
13.2s
0.294
0.144
80
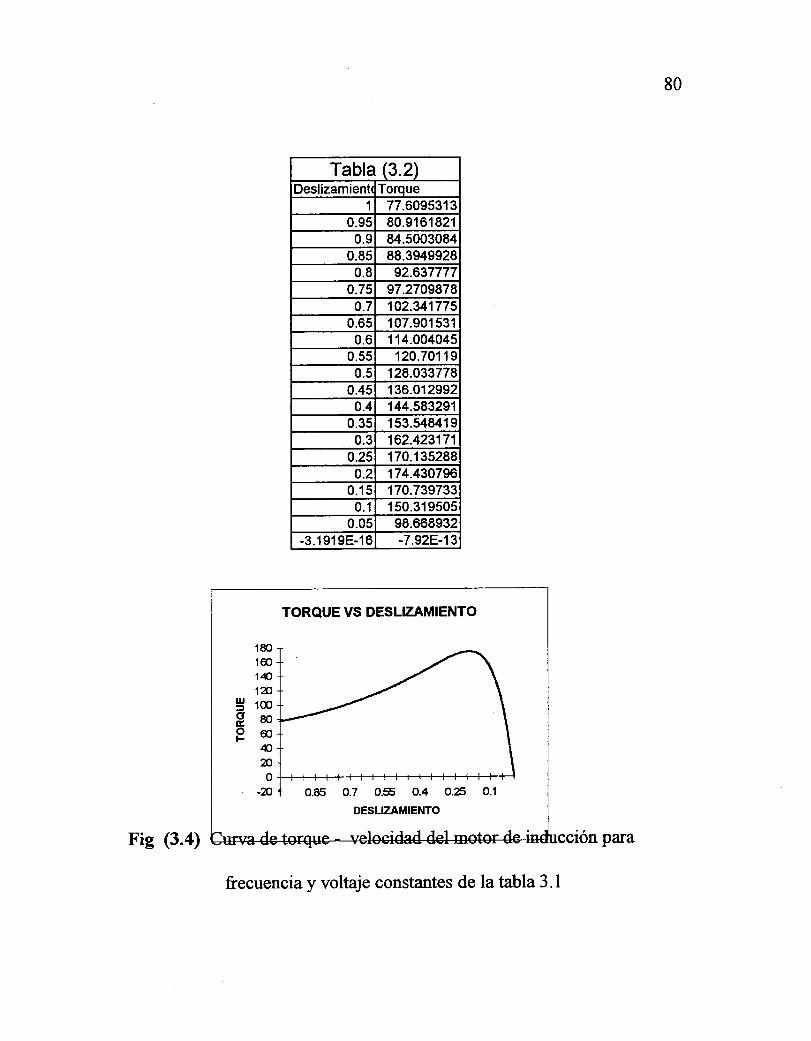
Tabla rc.z\Deslizamient Torque
1 77.60953130.95 80.9161821
0.9 84.50030840.85 88.3949928
0.8 92.6377770.75 97.2709878
0.7 102.3r'.17750.65 107.901531
0.6 1',t4.0040450.55 't20.70'119
0.5 128.0337780.45 136.012992
0.4 144.5832910.35 153.548419
0.3 162.4231710.25 170.1352EE
o.2 174.4307960.15 170.739733
0.1 150.3195050.0s 98.66E932
-3.1919E-16 -7.92E-13
TORQUE VS DESLIZAMIENTO
180160141n
5rogEog0o
4no
-nDESLIZAMIENTO
Fig (3.4)
frecuencia y voltaje constantes de la tabla 3.1
81
Cuando el voltaje y frecuencia de la energía suministrada se mantiene
costantes, la corriente y el torque son funciones solamente del
deslizamiento, como se indica en el circuito equivalente de la fig . (3.3),
donde la variable del circuito unicamente es R, / s.
Latabla (3.1) dá los valores del circuito, de un motor de inducción. Las
características del movimiento del torque son calculadas usando las
ecuaciones 3.40, 3.50 y se muestra con la curva de la figura (3.4). El
torque es cero a la velocidad sincrónica y aumenta proporcionalmente con
el incremento del deslizamiento.
Pero esta linealidad es pérdida rápidamente y el torque es máximo, lo que
es llamado torque crítico o máximo, donde el deslizamiento está
generalmente entre 20 - 30 %. El torque promedio esüí por debajo del
torque crítico, y por lo tanto el deslizsmiento del torque promedio es
generalmentede3-5%.
En operación con voltaje y frecuencia constantes el torque máximo es

82
generalmente dos veces mayor que el torque promedio, la capacidad de
sobrecarga del torque es muy limitada.
La porción recta de la característica de la curv4 es muy corta y el rango
de operación de la velocidad, es limitado por un pequeño rango. Así el
motor de inducción es considerado practicamente un motor con velocidad
constante.
3.4 LINEALIZACION DE LAS CARACTERISTICAS DE
TORQUE - VELOCIDAD DEL MOTORDE INDUCCIÓN
lo¡d ch¡na¿¡ilticcurw
Fig (3.5) Conhol de la resistencia secundaria del Motor
de Inducción

83
Como se muestra en las figuras (3.4) y (3.5) las curvas de torque,
velocidad del motor de inducción, tienen muchos porciones de líneas
cortas, en pequeños rangos de deslizamiento y el torque máximo es más o
menos dos veces el torque promedio. Esto hace decrecer la capacidad de
sobrecarga del torque y así reduce la calidad del rendimiento del motor.
Este rendimiento inferior, üene de voltaje y frecuencia constantes ( CV
,CF) de la operación del motor, ahora se aprovechará esto para mejorar la
operación del motor, siendo el primer paso en el conüol de los motores de
inducción.
De las ecuaciones 3.40 y 3.41, se tiene:
[R, + j (X r *X-) ] [Rz/s+j (X z+X. ) ] +X- z - -j X. i ,ll|2
[R r +j (Xr +X-)1 tR zls+ j(Xz+X-)] *X-2:ü,(R 2/s+jXr)io
Igualando:
jX.Vr :.Vr(Rz/s + jxr)
i, io
Iz: -jX- Io
Rz/s + jXz
Al reemplazar 3.51 en 3.50 se obtiene:
Í- 3l2P Rz(sX*)t liol tfN*l
84
(3.s1)
(3.s2)
so [Rrt i (sxz)2]
Cuando la corriente de excitación lÍ el se mantiene constante, el torque t
está solamente en fi¡nción de la frecuencia de deslizamiento ( sf ó so ).
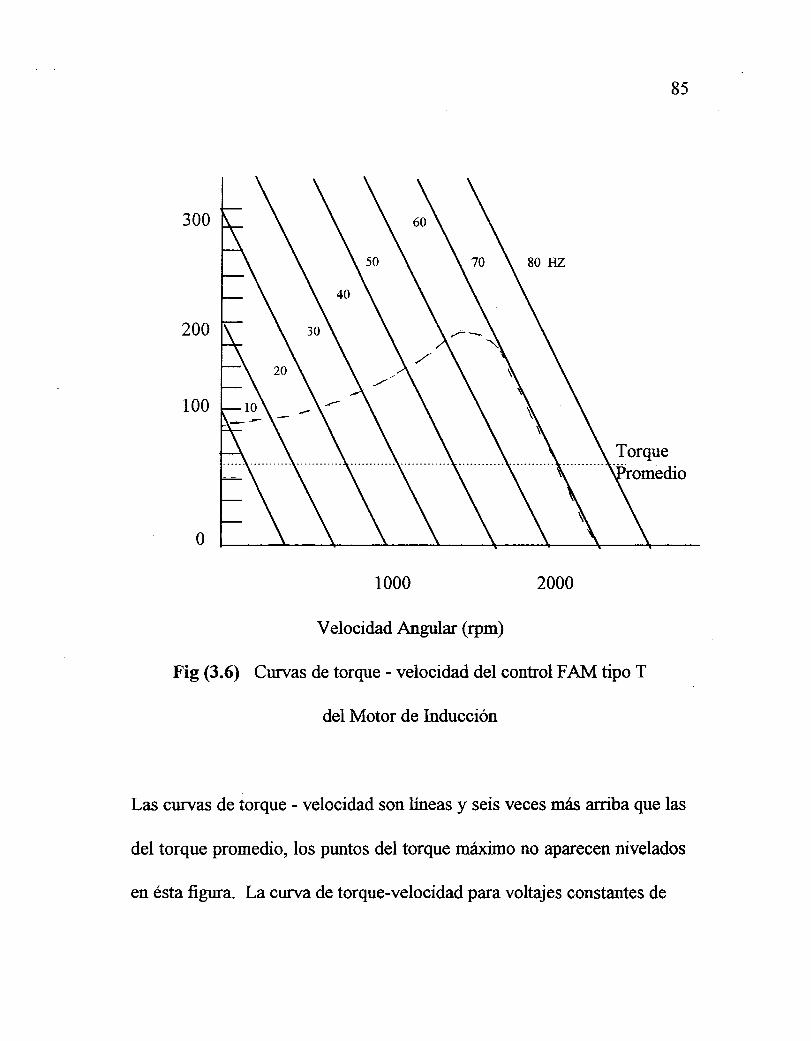
Luego, para el motor en la tabla (3.1), frg 3.6 muestra el torque r en la
ecuación (3.52) como una frrnción de velocidad del motor, para
diferentes valores de frecuencia.
85
1000 2000
Velocidad Angular (rpm)
Fig (3.6) Curvas de torque - velocidad del conüol FAM tipo T
del Motor de Inducción
Las curvas de torque - velocidad son líneas y seis veces mas arriba que las
del torque promedio, los puntos del torque máximo no aparecen nivelados
en ésta figura. La curva de torque-velocidad para voltajes constantes de
86
220 v y frecuencia constante de 60 HZ, es mosüada por la línea
punteada.
comparando con la curva ( Cv, CF ), las curvas de corriente de
excitación constantes son muy aprovechadas en la linealidad. La corriente
de excitación constante li ol, conserva la densidad del flujo girando en el
campo magnético constante del entrehierro, y así la mayor parte de los
materiales magnéticos son utilizados a un nivel constante. Este motor de
control que mantiene la amplitud de corriente excitante constante, es
llamado método de aceleración del campo (IIAM) ?.
3.5 TRANSFORMACION DEL CIRCUITO EQUIVALENTE DEL
MOTOR DE INDUCCION.
El circuito equivalente del motor de inducción no es único, hay infinito
nrfuneros de ellos y se debe escoger el m¿is apropiado.
El nrimero infinito de circuitos equivalentes, son iguales con respecto a la
impedancia de salida de los terminales primarios. Pero fansformando el
87
circuito equivalente tipo T, se obtuüeron varios circuitos.
Las ecuaciones del circuito 3.35 y 3.36, son combinadas en la siguiente
ecuación matricial:
iT¡, + j(x z + x-,1 [i:lIl* J '"'ti 'l: + X-)(3.s3)
[r;l:c[l;lIt;1:
Aquí, los estados variables son representados por vectores circulares.
Ahora las corrientes son hansformadas por la ecuación de fransformación:
tl il : (3.s4)
Donde s, es una constante arbitraria, en ésta transformación Ir
pefmanece invariable, y la corriente del secundario I" se trmsforma en
.:r; : 12/ u . Esto significa que relación de giro efectivo se cambia de
I a a. Sustituyendo la ecuación 3.54 en 3.53 y multiplicando ambos
88
lados de 3.53 por C t, So tiene.
c, tV] : c,Itl c [t]
li'l :
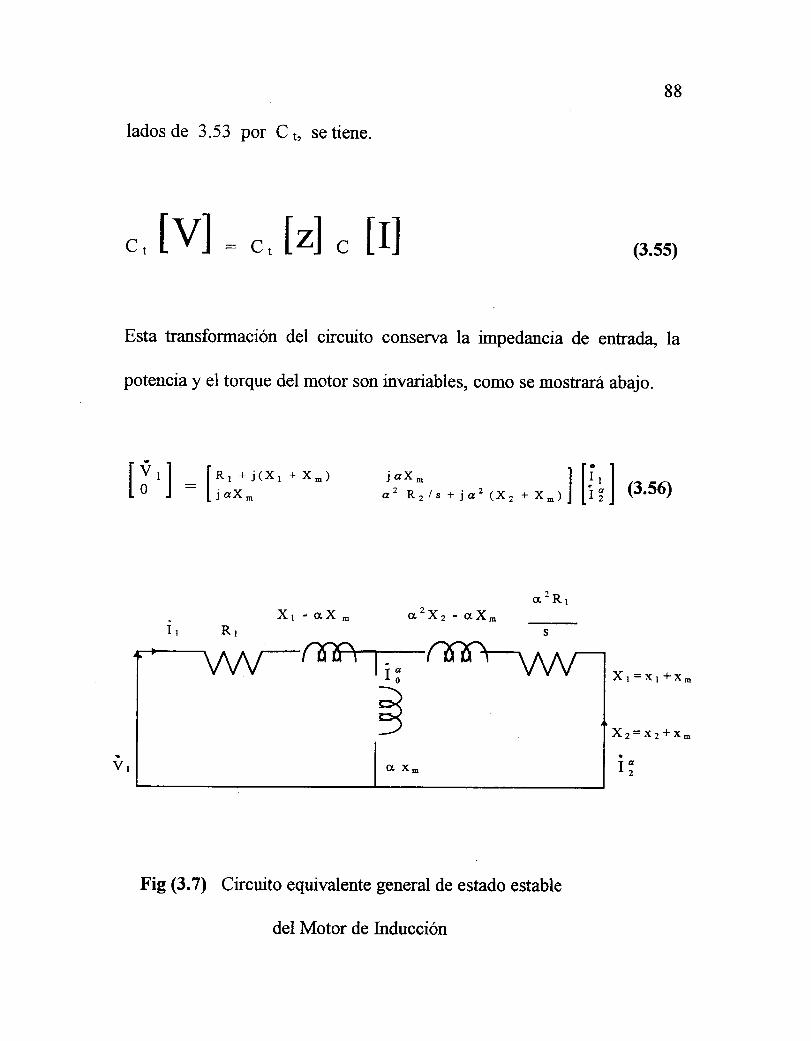
Esta transformación del circuito conserva la impedancia de entrad4
potencia y el torque del motor son invariables, como se mosfiará abajo.
(3.ss)
(3.s6)
Xl =X¡ *X.
Xz=Xz*x-
I;
[irlIli*.."*'+X-) jaX. I
o' Rr/s + j o'(xz r X-) I
otR,Xr 'oX - o.'X, - c¿ X.
Fig (3.7) Circuito equivalente general de estado estable
del Motor de Inducción
89
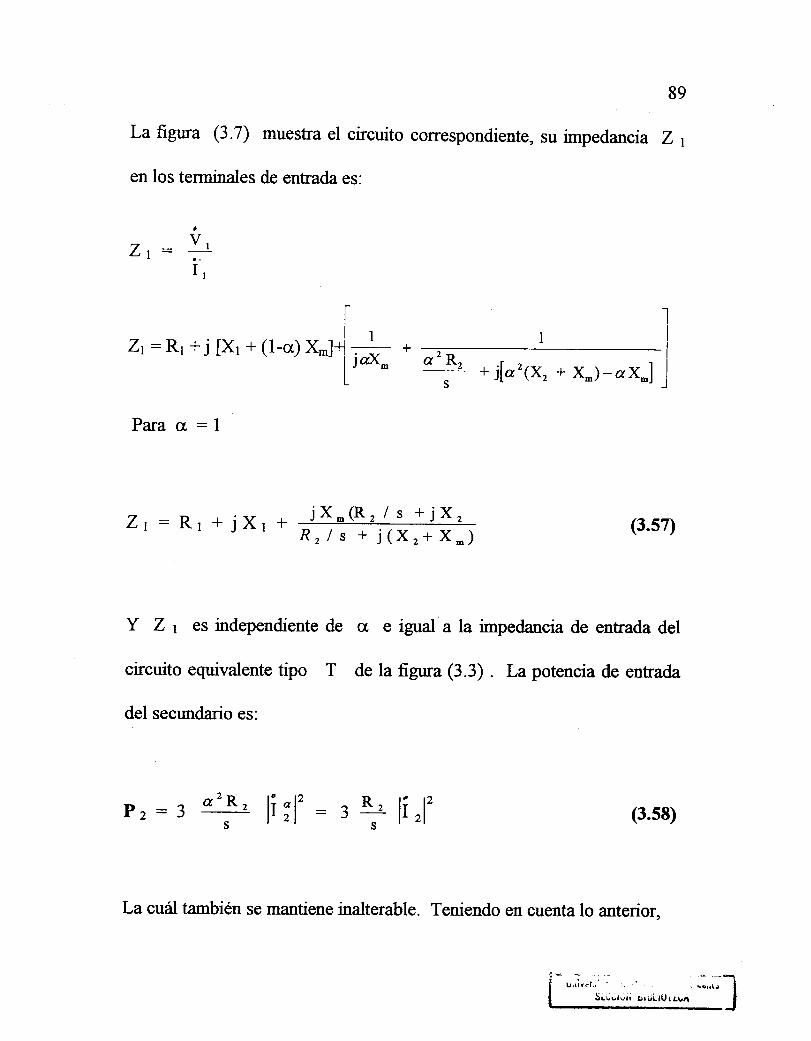
Z1La figura (3.7) muesfia el circüto correspondiente, su impedancia
en los terminales de entada es:
t
.7 Vr¿Jl
-Ir
t-
Zt:Rt+ j [Xr + (l-a) t.fr] #;t
Para cr : I
II
a'F.,s
21:Rr+jXr
Y Z t es independiente de
circuito equivalente tipo T
del sectrndario es:
Pz:3 4y li;l':3S
R2s li ,l'
+ ifaz1X, + X-) -ox^f
jX-(R, / s + jX,(3.s7)Rrls + j(Xr* X-)
a e igual a la impedancia de entrada del
de la figrra (3.3) . La potencia de enfiada
(3.s8)
La cual también se mantiene inalterable. Teniendo en cuenta lo anterior-
90
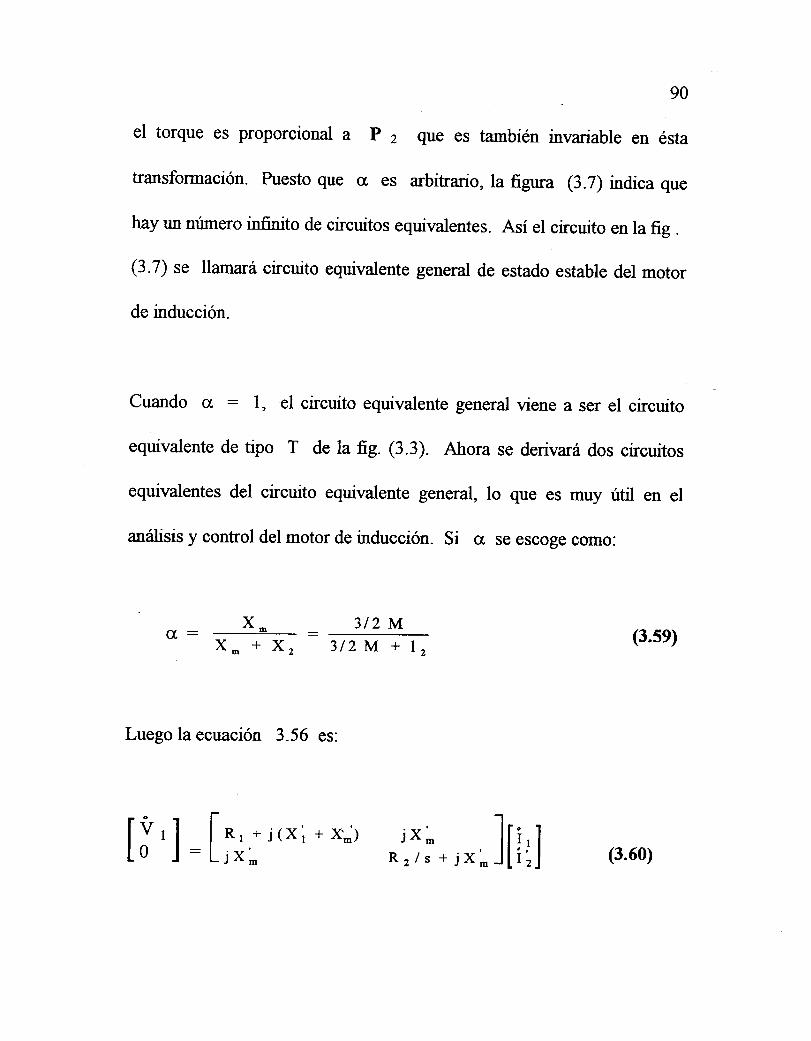
el torque es proporcional a P 2 que es también invariable en ésta
transformación. Puesto que a es arbitrario, la figura (3.7) indica que
hay un número infinito de circuitos equivalentes. Así el circuito en la fig .
(3.7) se llamará circuito eqüvalente general de estado estable del motor
de inducción.
Cuando d. : 1, el circuito equivalente general üene a ser el circuito
equivalente de tipo T de la fig. (3.3). Ahora se derivará dos circuitos
equivalentes del circuito equivalente general, lo que es muy útil en el
análisis y control del motor de inducción. si cr se escoge como:
Luego la ecuación 3.56 es:
3t2 M3/2 M ¡ | z
* x;)
\.t
a - At :x- + x2 (3.se)
.il, + jxr][llJ-llvtl lRr+j(x;Io J : L¡x- (3.60)
91
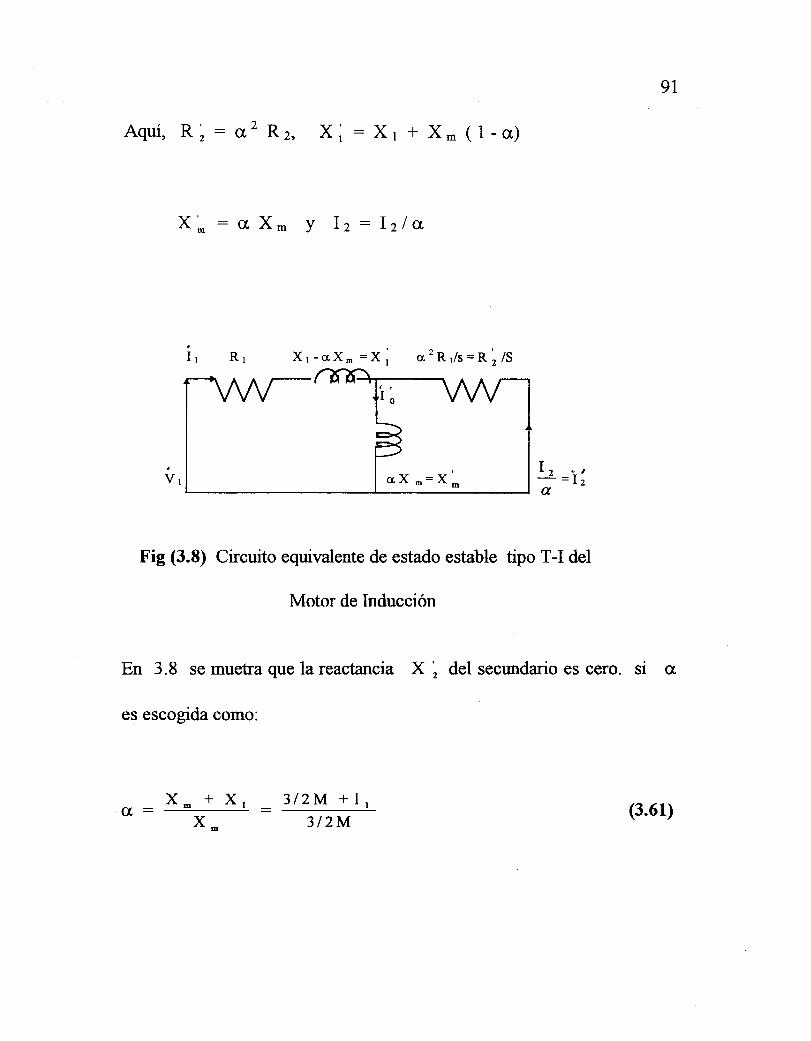
Aquí, Rr: s¿2 Ptz, : Xr * X- (1-cr)
X; : cr Xro y Iz : lzlcr-
cr,2R'/s=nzlS
Fig (3.8) Circuito equivalente de estado estable tipo T-I del
Motor de Inducción
En 3.8 se muetra que la reactancia X ; del secr¡ndario es cero. sl cú
es escogida como.
cú- X- + X,x_
3l2M f l,(3.61)
3 t2M

92
I i' ]: [l;; iTr, *,tx,* ",][ll]
La ecuación 3.56 es:
(3.62)
Aquí, R; :c[2R2, X -: üX- y X'r: cr'(X z+X-)-crX,
o-'Xr-c,X-=X i
Fig (3.9) Circuito equivalente de estado estable tipo T-tr del Motor
En la figura (3.9) se nota que la reactancia X ;' del primario es cero. Si
la react¿ncia x ; se mueve a los terminales de enfiada, el circuito
equivalente de tipo T- tI en la figr¡ra (3.9) üene a ser el circuito
93
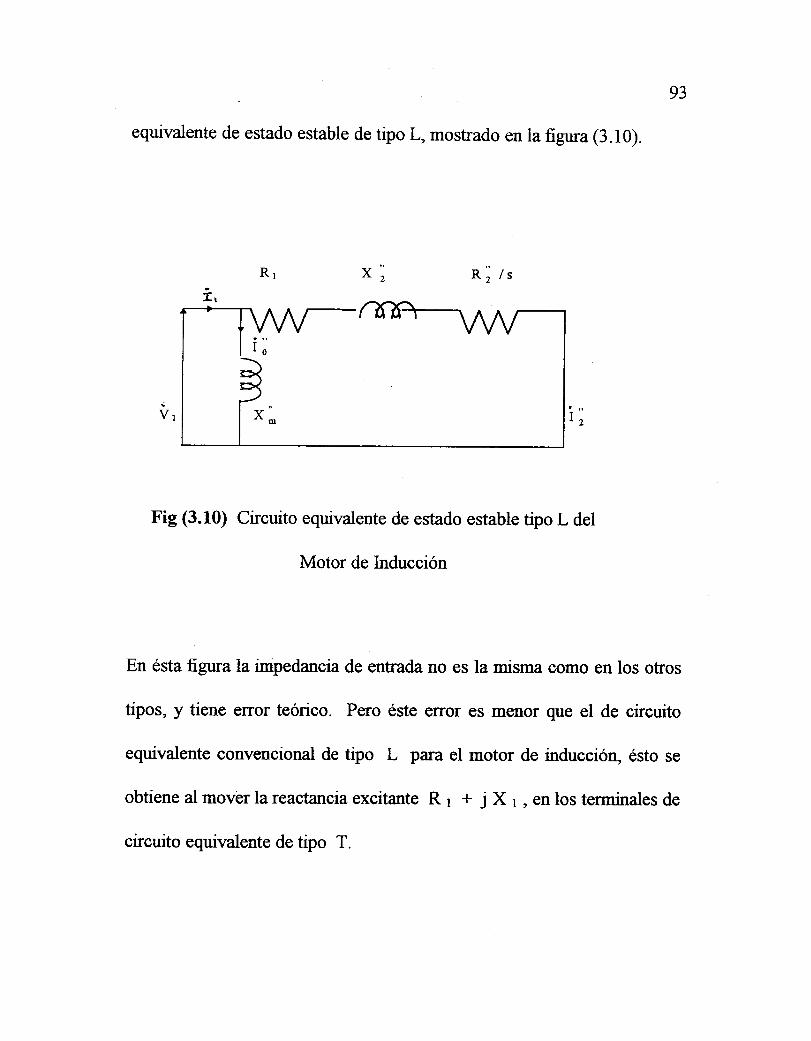
equivalente de estado estable de tipo L, mostrado en la figura (3.10).
nr ls
Fig (3.10) Circuito equivalente de estado estable tipo L del
Motor de Inducción
En ésta figura la impedancia de entrada no es la misma como en los otros
tipos, y tiene error teórico. Pero éste error es menor que el de circuito
equivalente convencional de tipo L para el motor de inducción" ésto se
obtienealmoverlareactanciaexcitante Rr + j X l, €rlosterminalesde
circuito equivalente de tipo T.
Vr
4. ANALISIS TRANSITORIO ELECTROMAGNETICO DEL
MOTOR DE II\DUCCION
4.I ANALISIS TRANSITORIO DEL MOTOR DE IIIDUCCION
POR EL METODO DE SEPARACION DE FASES Y VECTOR
ESPIRAL
En el capítulo 3, el método de vector espiral y separación de fase, ha
hecho posible escribir l?s ecuaciones de estado estable con variables de
una sola fase, representado las tres fases del motor de inducción. El
método de separación de fases, se ha usado por largo tiempo en el aniilisis
de estado estable, de las máquinas de tres fases, pero no se ha apücado al
análisis del fenómeno üansitorio.
El método de el vector espiral hace posible aplicar el método de separa
95
ción de fases, a los aniilisis transitorios de las máquinas de CA. En la
sección 3.2 ,las ecuaciones del circüto del motor de inducción para el
estado estable, se deducieron en términos de vectores circulares. La
representación del vector espiral se usa¡á para el análisis transitorio, pero
el proceso analítico es casi el mismo manejo que el estado estable. El
modelo de el motor de inducción dado en la fig. 3.2, se usará tarrbién
para el anáIisis transitorio
4.1.1 Análisis Transitorio del motor de Inducción Aliementado Con
Fuente de Corriente
En las aplicaciones del motor de inducción, la fuente inversora de potencia
es más frecuente para el tipo de fuente de voltaje que para el tipo de
fuente de corriente. Sin embargo, para el control del torque, la corriente
de entrada tiene más ventajas y la fuente inversora de corriente se utiliza
para esto
La ecuación para comenzar es dada por 3.12, la cual se describe aquí:

"!(ot+pr, : Jiir,
ar(at+er-2/3r) = J, lrg-znro
e r(@r + et+zt3í) : JZ i r"* r,tto
i . : Jtli,l
i b : Jtli,
io : Jtli,
96
0 : Rzír* lzpi. *ple, (4.1)
Las corrientes trifásicas simétricas del primario son el confiol de enhad4
y son dadas por las siguientes eouaciones:
Estos son vectores espirales con x : 0, o vectores circulares (ver
ecuación 1.34 y son idénticas a las ecuaciones 3.15. Aunque las
corrientes trif¡isicas secundarias, contienen componentes fansitorias, no se
puede expresar por vectores circulffies como las dadas en las ecuaciones
3.16 , pero las ecuaciones 4.2 son suficientes para reducir el mayor
flujo mutuo l, o dado abajo, es lamisma ecuación 3.21.
I
I
| (4.2)
)
ls: 3/2 M(i, + iae-je; (4.3)

97
Reemplazando ésta ecuación en 4.1 se tiene:
0: Rz i. * lzpi, * plZtZMI(i, +'..-,")l
0 : R zí, * (lz + 312 M) pi r + 312 Mp (iu e-je¡ 9.4)
Al insertar i u de la ecuación 4.2, con 0 : (D m t en 4.4, se obtiene:
0 : R zí, * (lz + 312 M)p i, + 3t2 Mp[Jtlr,]",,.,'..,*n,)l
Como: s: (o- o-)i o
s : deslizarrriento
(D : Velocidad Sincrónica
(D m: Velocidad angular del motor
0 : R zí,*(lz + 3t2M)pr, + 3t2Mp(¿li,lr j(sr¿ +'')(n.r)
98
La ecuación 4.5 contiene solnmente las fases a y r, éstas se sep¿ran
de las otras fases. La separación de fases proüene de la representación de
las va¡iables del vector espiral. La ecuación 4.5 contiene la frecuencia
de deslizamiento, pero no contiene explicitamente la velocidad del motor
o m , lo que indica que el transitorio electromagnético podría ser
indepenüente de la velocidad del motor, ésta independencia es muy
importante en la teoría del control del torque del motor, ya que muesfia
que el transitorio electromagnético dentro del motor se puede analizar
separadamente del sistema dinámico producido por éste. Cambiando la
notación r como 2, para que la fase r represente las tres fases del
secundario. Luego 4.5 se convierte en:
Rziz + (r, + 3t2 M)p iz: -3lzwolJf |Í,l. j(sart *"h4.6)
Esta ecuación es la representación del control de la corriente de entada
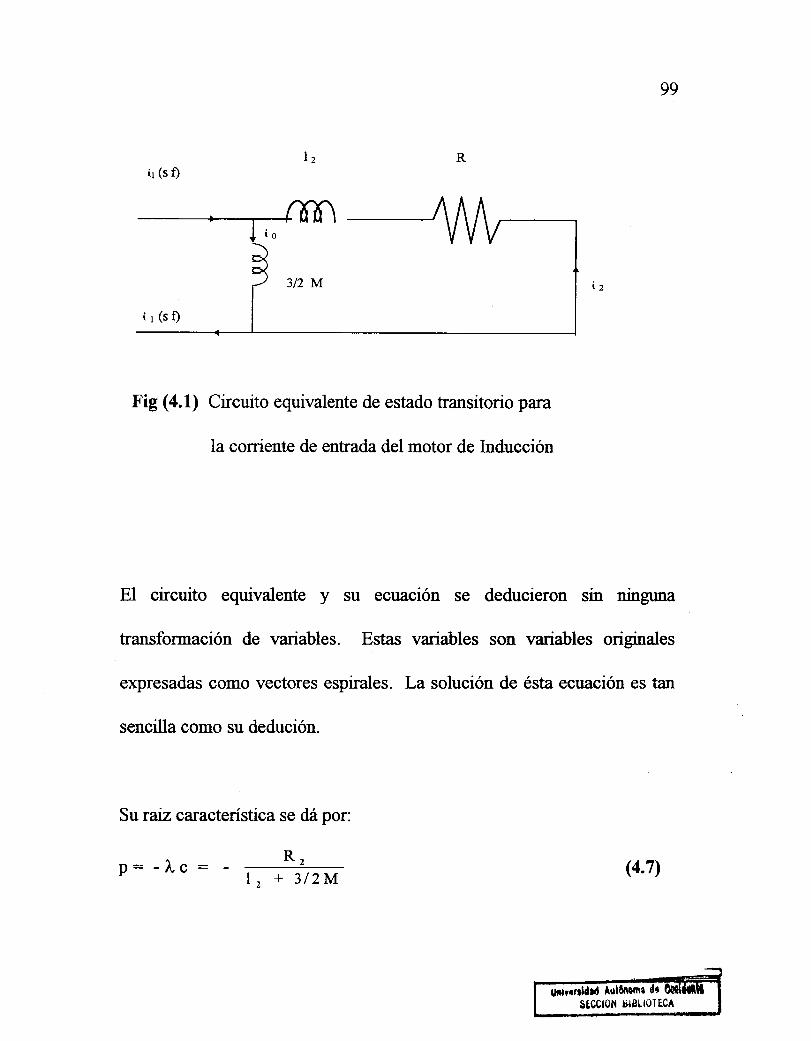
del motor de inducción la fig. (a.l) muestra el correspondiente circuito
equivalente.
99
l2
Fig (4.1) Circuito equivalente de estado transitorio para
la corriente de enfrada del motor de Inducción
El circuito equivalente y su ecuación se deducieron sin ninguna
transformación de variables. Estas variables son variables originales
expresadas como vectores espirales. La solución de ésta ecuación es tan
sencilla como su dedución.
R
Su raiz característica se dá por:
p- - )'c: l"*Yr" (4.7)

100
La solución general es:
i2: Aze-)"ct * rlt lirl sj(so,**r, (¿.S)
A 2 es una constante a¡bitraria, determinada de una condición inicial. el
segundo térnrino es la corriente de estado estable expresado como un
vector circular y se dá por:
-3/2jsoMI,L2 - R2 + jsuo(| , + 3l2M)
Como i,: li,l ."sort+e,) Sedene:
7L2
En la ecuación 4.6, el lado derecho representa el voltaje de entrada del
circuito equivalente de la figura (4.1), así la potencia de enüada del
secundario es:
-3/2jsa¡M 'rrrr, *t,-nrl I
I r+.rl
l"tt' )
li ,l
:lz
M)
M)
R2 + jsat(| , + 312
R2 + jsa(lz + 312

101
pz : R" t - 3lz Mj s ,Jli,. is,t] R" lr rl
Pz:3/2 }l4sor R" [-jr,] R"[r,] (4.10)
La velocidad que gsra la faerza primaria magnetomotriz, relativa al rotor
es 2 s crllp [rad s -'] y el torque por fase es:
r1 : * pz: *lztz Ms arR " [-j ¡,1 R
" [r r]J
11 :3A MPR" [-j ¡ '] R "lr r7
P : es el número de polos
El torque trif;ísico ( r, ) no es 3 t t sino:
t3 : sl8 MPr- [r, i;l [N-] (4.r2)
102
Donde r ^lz ] denota el coeficiente real de la parte imaginaria de z y *
indica el conjugado complejo. Esta ecuación se deduce en el anexo IV.
La potencia de salida trifásica es:
P¡ : ú)m T¡ (4.13)
(D m : Es la velocidad angular del motor en radls
Cuando todas las corrientes son cero en t : o. el confol de la corriente
de entrada se aplica en los terminales trifasicos primarios. La respuesta de
torque es dada por:
x 3 : et4 rvP li,l,l!4xy cos o ,' L lzrl
3 /2l$lR, e -'"'
sen(sart+ 0tz + stzMllzrl
La deducción de ésta ecuación se encuentra en el anexo fV.
I,)l
4.r4)
En (4.14) se rota que la solución transitoria del torque contiene la
103
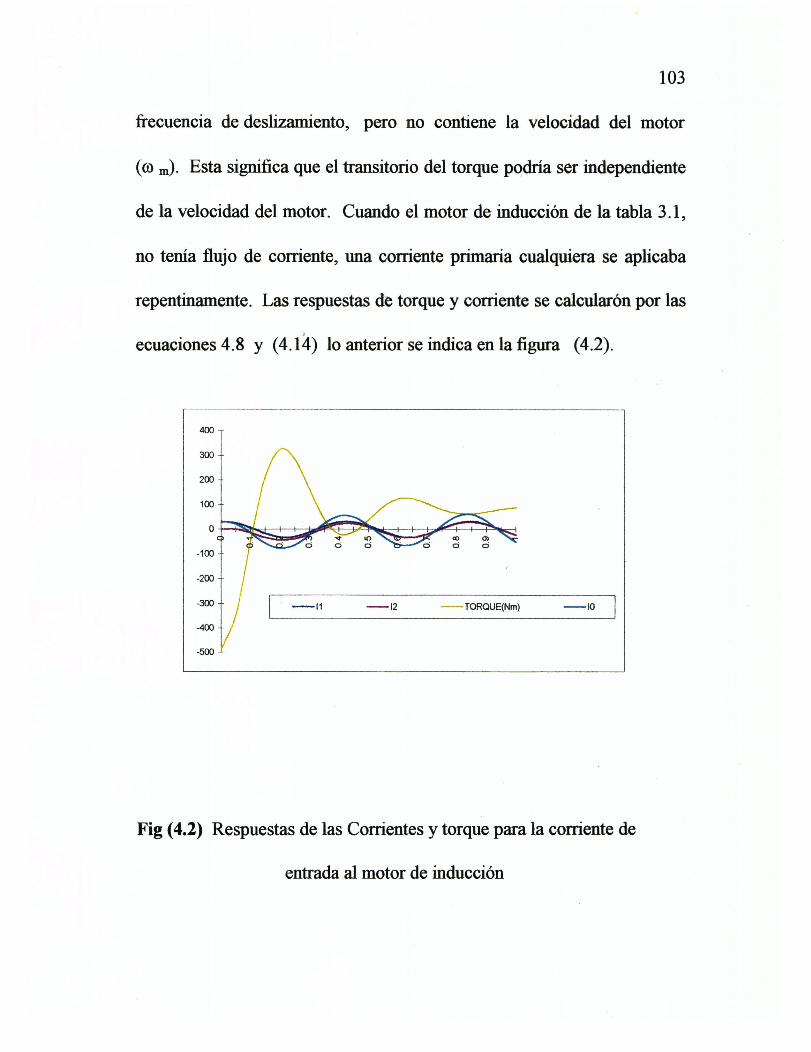
frecuencia de deslizmiento, pero no contiene la velocidd del motor
(co .). Esta significa que el tansitorio del torque podría ser indepe,ndiente
de la velocidad del motor. Cuando el motor de inducción de la tabla 3.1,
no tenía flujo de corriente, una corrie,nte primaria cualquiera se rylicaba
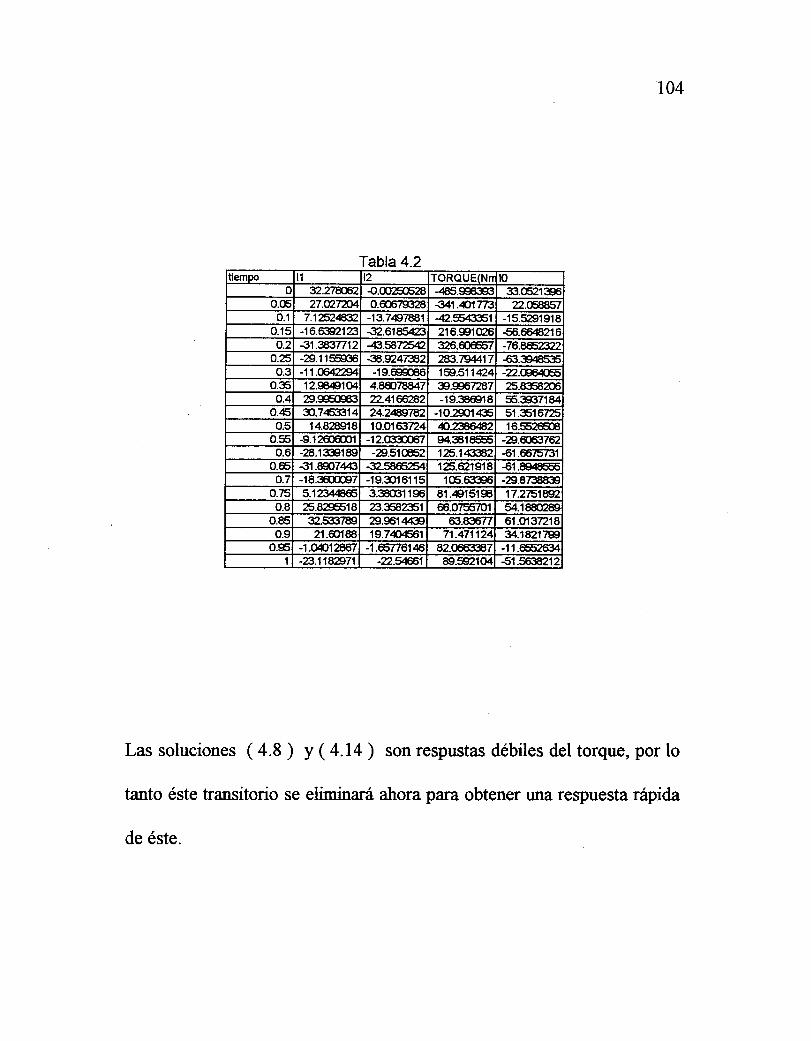
repe,ntiname,nte. Las respuestas de torque y corriente se calcnlrón por las
esuaoiones 4.8 y (4.1h) lo anterior se indica en la figura (4.2).
300
2ü)
lm
o
-lm
-200
.3{n
400
-500
-ll -12 )
-to
Fig (4.2) Respuestas de las Corrientes y torque para la corrie, te de
e,ntrada al motor de inducción
104
Las soluciones ( 4.8 ) V ( 4.14) son respustas débiles del torque, por lo
t¿nto éste transitorio se eliminará ahora para obtener una respuesta rápida
de éste.
Tabla 4.2liempo l1 2 IORaUE(Nn 0
c e..27W2 o.m25628 €.w 33.(52f Smo.G 27.V¿T& o.ffi782€ -41.41Tn Z-Wt
o.1 7.1É2& -13.7¿S7881 4.s54¡61 -15.5291918a 4E -16.W21n -Q..61E€42^ 216.91@f, 56.664¡21€o.2 313€B7712 4.5a7?54 326.@666-i -í6..EfE.7.<72
o.É -29.119( 4.52473l,2 rc.79/,r'.17 {I.GI4EÑEo.3 -11.WW -1g.ffi€ 1s..511Qt -2..ffi¿ÉE
o.s 12.sre10l 4.8@7€E47 a.g,6T?€'t 25.E6E20€o.4 29.ffi 2_4166,?g| -19.38€18 56.97184
o.45 3.74S814 24.2&7& -10-?914 51.516725o.t 14.828918 10.o163724 4.M2 16.526S8
o.5€ €.12m1 -12.(rrIxb"i 94.3818ffi -8.ffi762o.€ -u.1G18S¡ -8.5'tffi2 125'1@2 -61.66?5/:I
o.G 31.8(fi44C €¿5666254 125.621918 €1.@€5660.7 -18.3re7 -19.316115 16.60€6 -29.E73E8G
o.r 5.1ffi 3.3gr}lt96 E't.€151S 17.2É1ñ2o.e 25.82518 73.ffire1 66.O85701 54.18tn28g
0.8€ 32.53378S 29.961448 63.8trt7 61.O132r€o.s 21.Sr8€ 19.7ffi1 71.47112¿ u.18i217g;
o.s 1.o4o1?€É-t -1.6nd4, 82.ffit -l L665263¿1 -8.11a?971 -2'ffi1 89.5921(} -51.563C212

De la figura (4.1), se halla la corriente de excitación i o así:
io: ir * íz: Az e-lt + J, lirl .j(sort+eo¡
105
(4.Is)
El segundo término es la corriente de excitación de estado estable. En
t: 0, la ecuación (4.15) se conüerte en:
io: Az* .[t li,l .j*o (4.16)
SiAz:0 se trene:
io: J-zliol ."' (4.r7)
Luego el fransitorio no sucede y la respuesta de torque es instantánea.
Esto significa que si el motor se excita con anterioridad, con una corriente
excitante de estado estable, el nansitorio desaparece. Este es el principio
de la pre-excitación, la cual es el fundamento de conüol FAM.
106
cuando la corriente primaria i 1 se aplica repentinamente en la fig (4.1),
io(0) noesiguals io(0).Enlaecuación (4.16) i6 eS ro(0*), la
cual debe ser igual a Jl li rl r j t
o , este problema es eliminado en el
control FAM de tipo TI 7.
4.I.2 ANALISIS TRANSITORIO DEL MOTOR DE INDUCCION
ALIMENTADO CON FTJENTE DE VOLTAJE
Una función exponencial es la que frecuentemente se asume con éste
método. Así el vector espiral es el tipo de solución más apropiada para
éste caso, la solución de la ecuación (a.8) lo ilustra.
El modelo del motor de inducción de la fig (3.2) es de estnrctura
simétric4 así para las fies fases se espera que tengan raíces características
comunes. Bajo operación simétric4 las variables de las tres fases-
también son simétricas y las soluciones de sus vectores espirales se
pueden tomar como:
107
(4.18)ia: AteDt, ib: Are6t-2l3jtc,
Aquí laratz característica es:
6: -1, + jro
Las raíces características de
diferentes y se denota como
espirales así:
ic: Are6t+2l3jtr
(4.le)
las corrientes secundarias son generalmente
6 ', estas son representadas por vectores
ir: 42e6 t, ir: AzeE t-213 j'rc, it: Aze6 t+2?i" (.20)
Las corrientes primarias en la ecuación 4.18 y las corrientes secundarias
de la ecuación 4.20 son diferentes de las corrientes en las ecuaciones 3.15
y 3.16 solo en lo referente a E y 6 ' y entonces se puede demostrar del
mismo modo que las ecuaciones 3.17 - 3.29, también es válido para las
corrientes en las ecuaciones 4.18 y 4.20, parte importante en el análisis
propuesto y serán reescritas abajo.

108
En este caso, las ecuaciones lineales son dadas por 3.11 y 3.12, las
cuales son válidas para los estados transitorios y estables, también los
flujos mutuos ?" g a y L g que üenen de las ecuaciones 3.13 y 3.14.
Para las corrientes en las ecuaciones 4.18 y 4.20, se tienen las
siguientes ecuaciones.
i¡ - i " : - j Jt
i, - it : - j Jj
lsu : 3/2Miu * 312 M,irsjo
LEu:3/2Mi, + 312 Mius-je
Sustituyendo estas ecuaciones en 3.ll y 3.12 se tiene:
ia
ir
(4.2r)
(4.22)
(4.23)
(4.24)
Estas son como las ecuaciones 3.18 y 3.19, sustituyendo éstas
ecuacionesen 3.13 y 3.14. Seobtiene.
Va: Rriu * lrpiu +312M[piu * p(irejt)] (4.2s)
Donde.
(o m : Es la velocidad del motor
(Dm : P0 [raüS] (4.27)
Multiplicando (4.26) por e j0,
S€ obtiene.
0-Rzile+l2pi.ej0+3 12 Mpi,e10+3l2Mpi,^ejs+3l2Mpiue-ieé0-3/2Minjro-e-je4e
0:R¿ide * p., (lz + 3/2IvD és + 3l2M(p-jro-) U (4.28)
0:Rzrr * lzpr + 3/2MIpir + piae-jt-jrmiae-j01
irsjo -
(pi,)ejo
(4.50) en (4.25) y @.28) se tiene:
d0
109
(4.26)
(4.2e)
(4.30)
P----¿+l-vrrrrfs,¡;,,J , 'n4 rle Ccgif¡rh
a, ejt^t
I
*jtrl-i.
I
Lf
Pi.:
Reemplazando (a.29) y
Stli¡t¡u 8¡&Ll0fr0A

va: Rr i" + (lr + 3l2M)piu + 3l2Mpi,
110
(4.31)
Despejando de (4.30) se obtiene:
Reemplazando en (4.28):
0: R2i, + (1, + 3l2M)(p-jro.)i;+ 3lzM(p-jor-)i"(4.52)
Las ecuaciones 3.28 y 3.29 son de variables separadas, cambiando a
por 1 e i r por i 2. Las ecuaciones 4.31 y 4.32 son dadas
como una ecuación matricial así:
[ ;']: [];,|liJ. i::':'l',Y?,, * 3,2M)(p-i,.-,1 [;;1 (4.33)
4.33 es una ecuación importante para el motor de inducción y es valida
para los estados estable y tansitorio. Sus variables son las variables
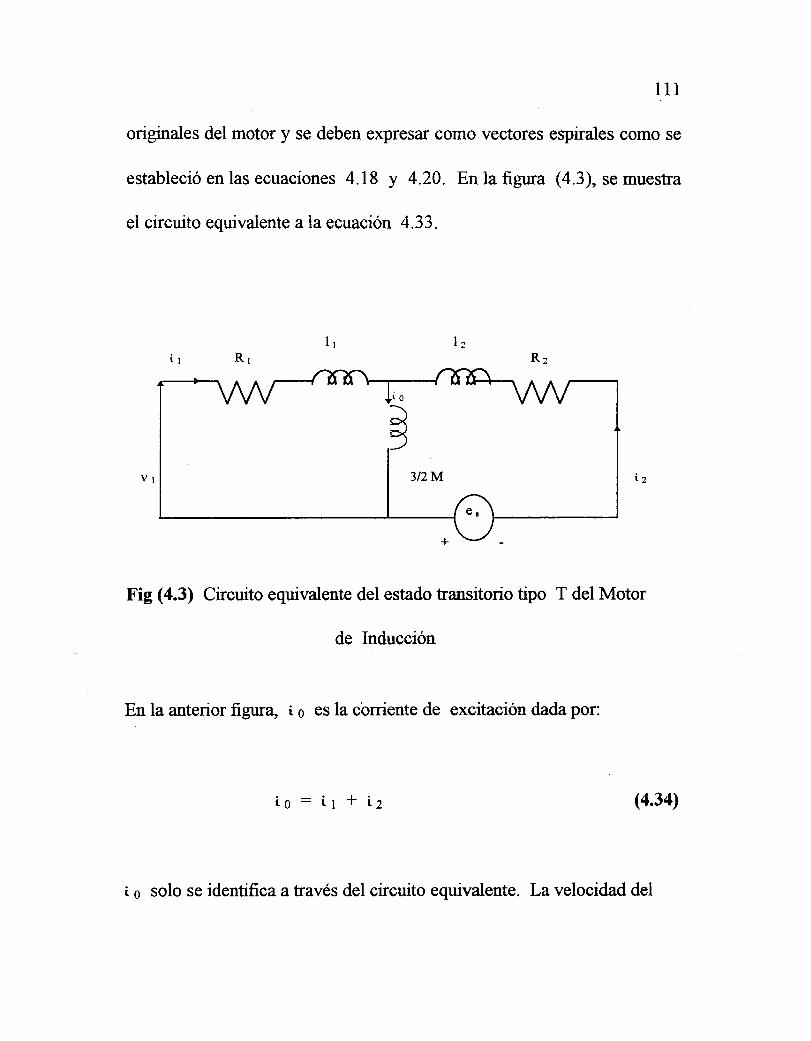
lll
originales del motor y se deben expresar como vectores espirales como se
estableció en las ecuaciones 4.18 y 4.20. En la figura (4.3), se muestra
el circuito equivalente a la ecuación 4.33.
Fig (aJ) Circuito equivalente del estado transitorio trpo T del Motor
de Inducción
En la anterior figwa, i e eS la corriente de excitación dada por:
io: it -l íz (4.34)
i s solo se identifica a tavés del circuito equivalente. La velocidad del
tt2
voltaje ( e, ) en el circuito es:
es: -jco-l3lzMir * (lz+ 3l2M)trl (4.3s)
La cual es proporcional a la velocidad angular del motor (D m. La figura
(4.3), taurbién es válida para el estado estable. En el estado estable los
vectores espirales se conüerten en vectores circula¡es, por lo cual p se
reemplaza por j ro. Luego la ecuaciónmatiz (4.33) se conüerte en las
ecuaciones 3.30 v 3.31.
Los valores instantáneos de potencia de salida P e y torque r 1 por fase
son:
Pr : R" [er] R" Iiz] (4.36)
(4.37)lNm l
Los valores trifásicos no son fres veces P r y r 1, p€ro ss dan pori
P¡: IPr:Pra*Pru*Pr. (4.3S)qb,c
P P,T1 :;- z@^

T3: I tt : Tra * f r¡ * Tr" [N-]ab.c
Eltorque (r¡) de éste motor es:
r3:9/8MPI* [ir r;] fNml
Esta ecuación es la misma que la ecuación (4.12).
trifasica es:
13:914lll,d?.t. Iit i, ]
ll3
(4.3e)
(4.40)
La potencia de salida
(4.4r)
4.33, será calculada y su ecuación
Pr: 2@^-P
La solución general de la ecuación
característica es:
Rr+(lr+3/2M)p3l2M(p-jo^)
3t2Mp IRz + (lz + 3/2M)(p-ja¡-)l : (4.42)
tt4
Esta es de segundo órden con respecto a p y se podrá resolver
fricilmente para p. Las dos raíces características se denotan por 6 r y 6 z.
La solución general de (a.33) es dada por:
i1 : Are6rt + A ze6z'+ Ji li ,l rj(ot+0,) (4.43)
Los dos primeros ténrrinos son transitorios donde A r y A z son
constantes arbitrarias, las cuales se determinan por condiciones iniciales.
son vectores espirales, como se asumió en las ecuaciones 4.18 y 4.20.
El tercer término es la solución para el estado estático.
v: Ji lú'l .j(ort-e) (4.44)
Todos los términos de la ecuación 4.43 son vectores espirales y los
téminos de estado estable son vectores circulares. La corriente secundaria
es obtenid4 sustituyendo la ecuación 4.43 en la segunda línea de la
ecuación 4.33, como se sigue:
L2--3lzNl,(á, - j, ^)R" + (1, +3/2M) (á, - jat^)
115
3/2M(6, - j ot ^) x
R, *(1, +312M)(6r- jot^)
(4.4s)
Arettt
3 /zwj s at Ji I i,l "
i(at+ o,)r -6 t - | 'l
R2 + j(lz*3/2lvf)sa
Para el motor de inducción en la tabla 3.1. el fenómeno üansitorio se
calculó por las soluciones de las ecuaciones 4.43 y 4.45. Primero se
hallaran las raíces características, estas son expresadas como.
+ J(ür (i:1',2) (4.46)
Aquí, T r y T 2 son constantes de tiempos decrecientes, ] o 1 y @ 2
son las velocidades angulares en radianes eléctricos / segundos y la
siguiente relación lo establece, como se puede comprobat con la ecuación
4.42.
(0 1*az:(om 9.47)
Las figuras (4.4) y (4.45) muestra el resultado de calcular las raices
características como funciones de la velocidad del motor
6i: +
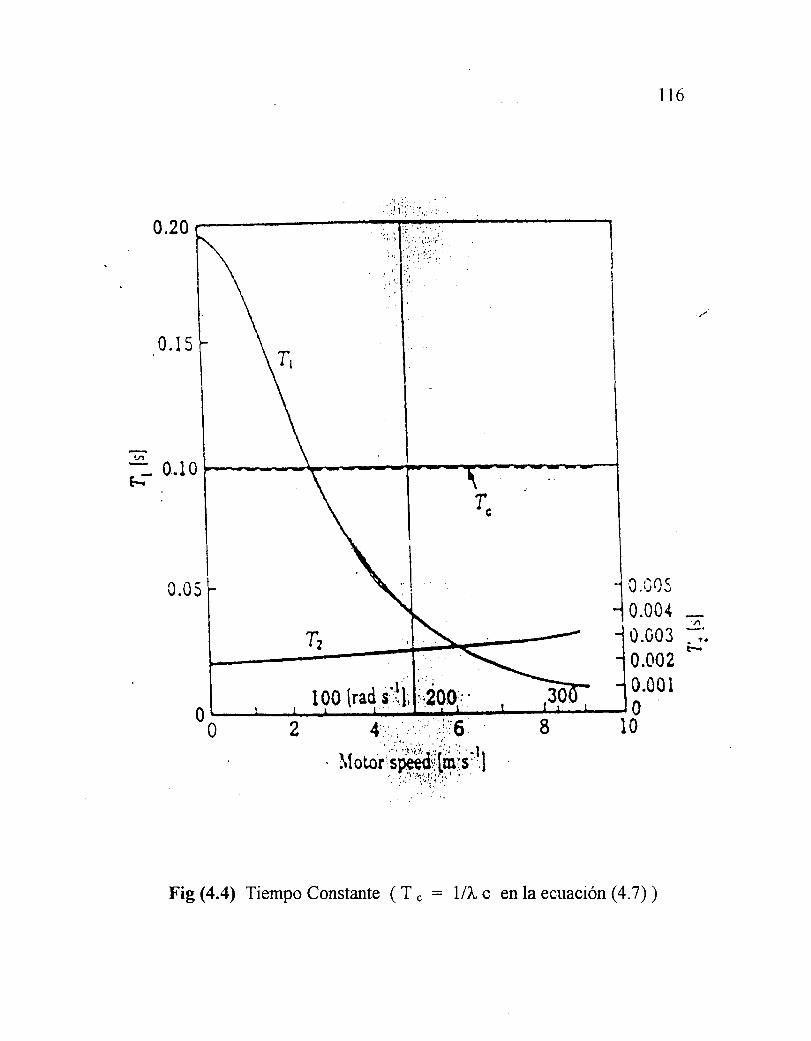
116
Gr-:-
C.ri05
0.004
0.003
0.0020.00 r
0IO
aat-
100 lrad s'lh
Fig (a.a) Tiempo Constante ( T. : IIX c en la ecuación (4.7))

117
'v¡
<l<¡r -
-6c,.q.,
@
<fl
=b¡
{6trfotor sF€e{i [r r tl
Fig (a.fl Términos Transitorios de la velocidad angular.
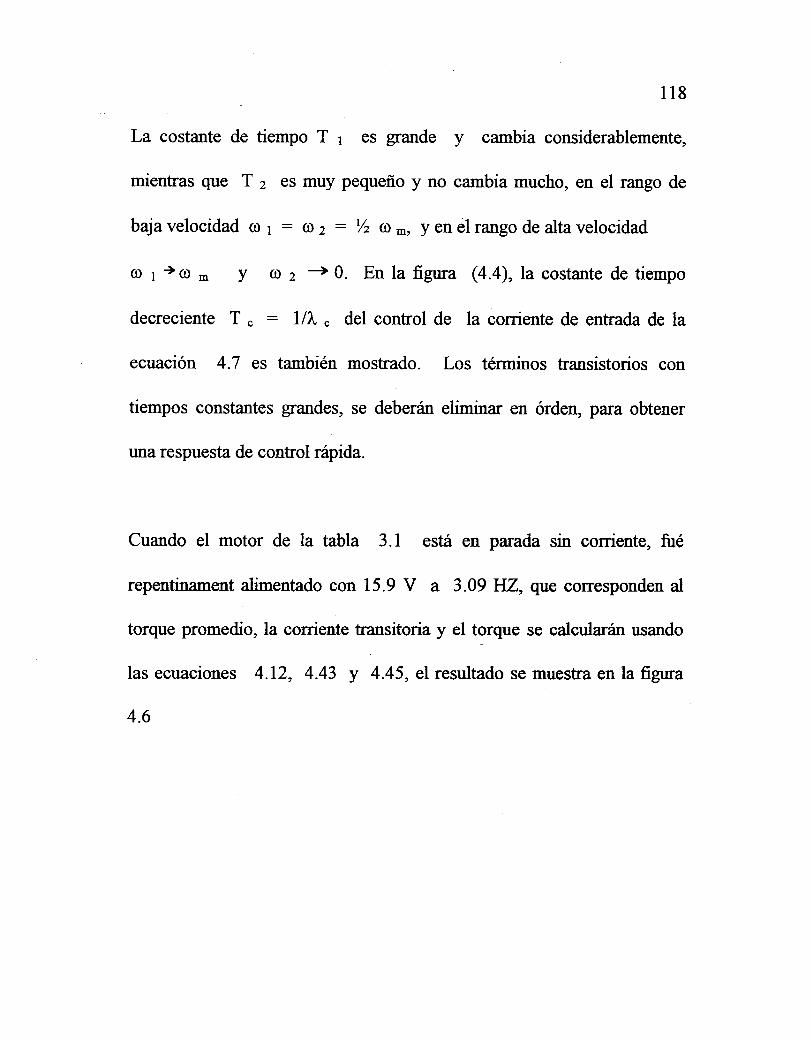
118
La costante de tiempo T 1 es grande y cambia considerablemente,
mientras que T 2 es muy pequeño y no cambia mucho, en el rango de
baja velocidad <o I : (D 2 : y2 (D m, y en el rango de alta velocidad
ú) r )(D * y @ 2 + 0. En la figura (4.4), la costante de tiempo
decreciente T . : llL " del confol de la corriente de enfrada de la
ecuación 4.7 es también mostrado. Los términos üansistorios con
tiempos constantes grandes, se deberán eliminar en órden, para obtener
una respuesta de control rápida.
Cuando el motor de la tabla 3.1 está en parada sin corriente, fué
repentinament alimentado con 15.9 V a 3.09 HZ, que corresponden al
torque promedio, la corriente transitona y el torque se calcula¡án usando
las ecuaciones 4.12, 4.43 y 4.45,e1 resultado se muestra en la figrra
4.6
119
Fig (a.6) Respuesta Transitoria del motor de Inducción en el arranque
sm comente en t : 0
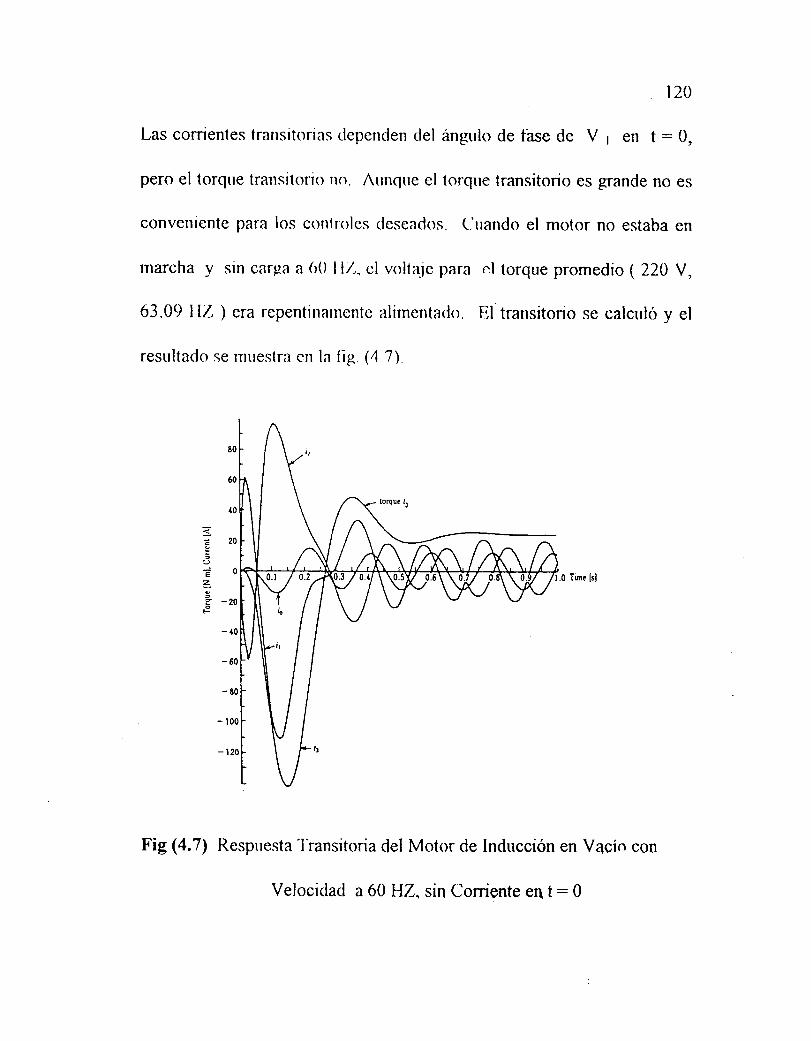
t20
Las corrientes transitorias dependen tlel ángulo de fase de V ¡ en t : 0,
pero el lorque transitorio rro. Aunque el lorque transitorio es grande no es
conveniente para los coltlroles cleseados. (lr¡ando el motor no estaba en
rrrarcha y sin carga a (r0 ll/,.c|volta.je para el torque promedio (220 V,
63.09 llZ ) era repentinalncntc alimentado. til transitorio se calculó y el
rest¡ltado se mr¡estra en la lig. ( 7)
z,
F
60
{0
20
0
-20
-{0
-60
-E0
- r00
.0 Tinc kl
Fig (4.7) Respuesta l'ransitoria del Motor de Inducción en Vacio con
Velociclacl a 60 HZ. sin Corriente en t: 0
t2l
Al presentarse fransitorios muy severos, los valores picos de las corrientes
y torque son bastantes grandes de 5 - 6 veces sus valores promedios.
Como se muestra arrib4 los fenómenos transitorios para la condicción
inicial de corriente cero son bastantes severos y no son aconsejables para
los propósitos de control.
s. CTRCUITOS EQUTVALENTES DEL MOTOR DE ThIDUCCTON
EN ESTADO TRANSITORIO
En la sección (3.5), el circuito equivalente de estado estable del motor de
inducción 5s ¡nnsforma para obtener, los circuitos equivalentes de tipo
T.tr del circuito equivalente de tipo T. Aunque tienen la misma
impedancia en los terminales de entada, el control FAM muestra
diferentes aspectos de los distintos circuitos equivalentes 7.
La variable de fransformación se aplicará ahora al circuito equivalente de
estado transitorio de tipo T, para originar los circuitos equivalentes de
estado transitorio de tipo T-I y T- tr. Las corrrientes se transformaran
por la siguiente ecuación matricial:
[l;1 : tl :l:[l;l (s.1)
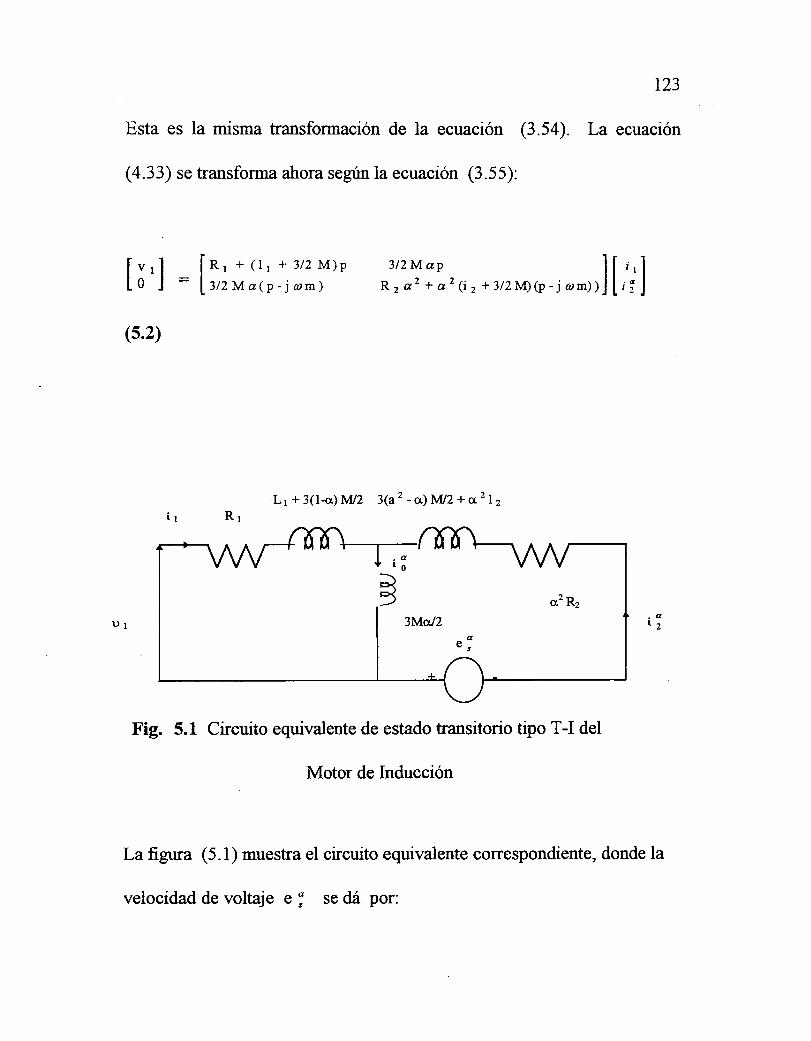
123
Esta es la misma transformación de la ecuación (3.54). La ecuación
(4.33) se üansforma ahora según la ecuación (3.55):
[;'] :
(s.2)
L1 + 3(l<,) lvf2 3(az - a)M/2 + o"2 | z
Fig. 5.1 Circuito equivalente de est¿do transitorio tipo T-I del
Motor de Inducción
La figura (5.1) muestra el circuito equivalente correspondiente, donde la
velocidad de voltaje e i se dá por:
[*,*(lr+3/2M)p 3/2Map l[,,1luzwt a(p - j com) R z a2 + az (i z + 3/zl'O1¡l - j ¿¡m)lJ Ir; .|
D¡

aJ.).-: -;Jú)mMcr,il - JCDmc[',(lz +L )*o';
124
(s.3)
Este es el circuito equivalente general de estado transils¡., eu€ contiene
la constante arbitraria ü,. Por lo tanto hay un número indefinido de
circuitos equivalentes, que tienen la misma impedancia" de entrada, en las
terminales del primario en estado transitorio.
Esto se puede probar de la misma manera en la ecuación 3.57. Los
fenómenos transitorios electromagnéticos en el motor, difieren p¿tra
valores diferentes de o, resultando diferentes circuitos equivalentes. Se
hallar¿ín circuitos equivalentes escogiendo valores apropiados p¿ra ü,.
Cuando cr se escoge como:
cf, - (5.4)
J-M2
-Jl- + - M"2
(5.2) se conüerte en:
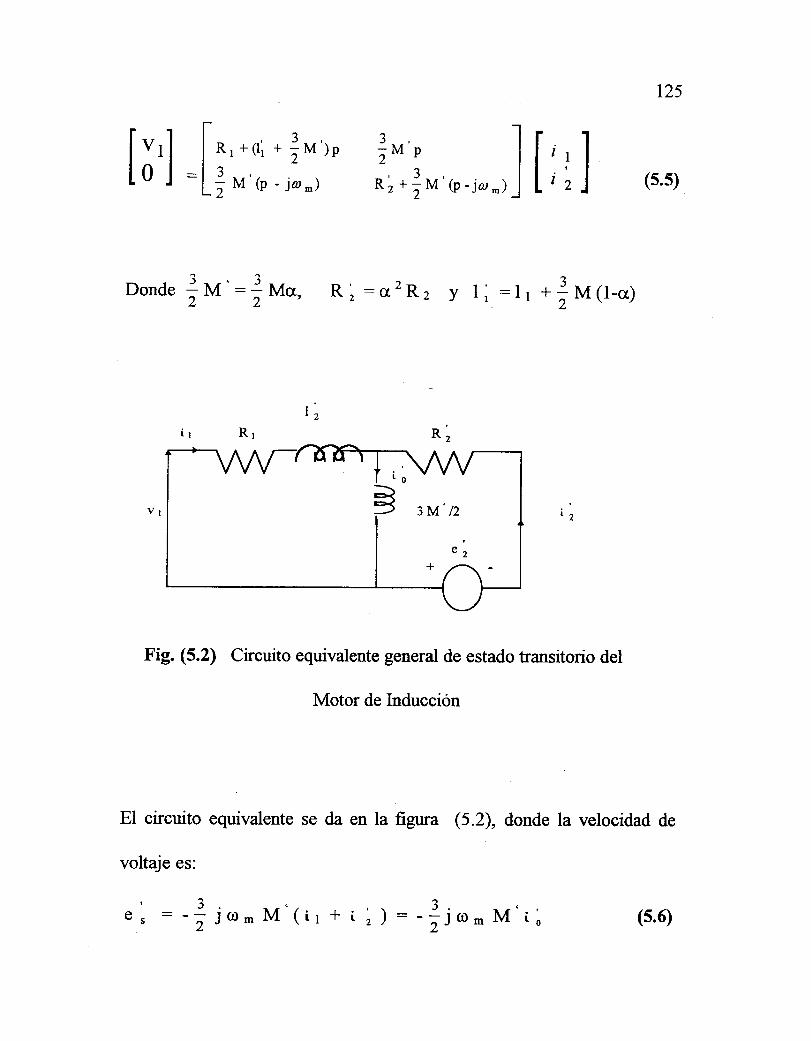
[ ;'] :[;il .,:-*^,"
¡l;v (p,,-,] [ ; l l
125
(s.s)
Donde ?^ 3 -Rr:cr'Rz y l; :lr *;M(l-cr)
t.
Fig. (5.2) Circuito equivalente general de estado transitorio del
Motor de Inducción
El circuito equivalente se da en la figura (5.2), donde la velocidad de
voltaje es:
,w' : i,*o,
., : -:jar- M'(ir * r, ) : -;jro- M'i, (s.6)
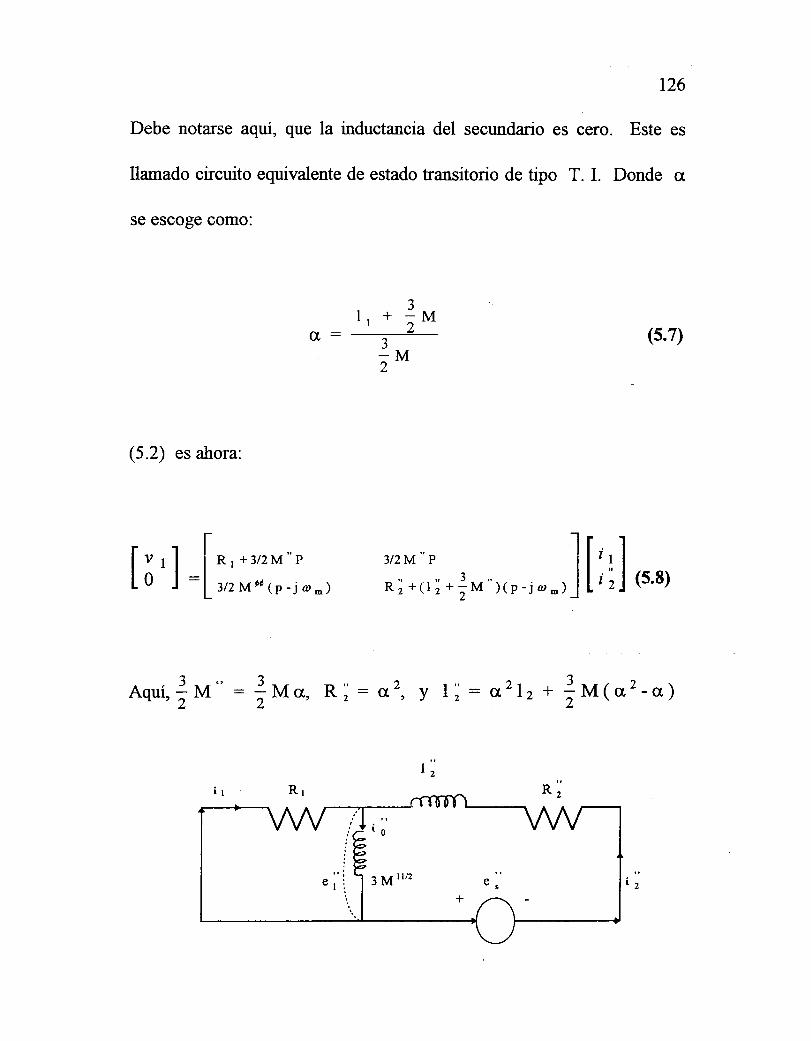
126
Debe notarse aquí, que la inductancia del secundario es cero. Este es
llamado circuito equivalente de estado transitorio de tipo T. I. Donde cr
se escoge como:
cf, -
aJl. + -M'2J
-M2
(s.7)
(5.2) es ahora:
[;']3/2M" P
J,,R"+fl"+-M'2 )(p-j,-,][;11 (s.8)
t-
I Rr+3/2M P
:luzM"(p -jco^)
Aquí, ]w" : ;M c, Rr: c,', y l'): O'1, *;M(o'-O)
r27
Fig (5.3) Circuito equivalente de estado fransitorio tipo T- tr
del Motor de Inducción
La figura (5.3) muestra el circuito equivalente correspondiente, donde la
velocidad de voltaje e ,' se dá por:
Se nota que la inductancia I ;' es cero. Este es llamado circuito
equivalente de estado transitorio de tipo T-tr.
En el circuito equivalente fransitorio de tipo T-I de la fig .(5.2) se
aproxima a:
l, :lr +lz, :M': ]v--1, (5.10)
Y en el circuito eqüvalente fransitorio de tipo T- II, se aproxima a lo
srgr[ente:
: lt * lz, )w : Utut
+ lr
r28
(s.11)
Estas aproximaciones muestran la naturaleza de las inductancias, pero no
se debe us¿r en los confroles computacionales, en lugar de esto se usa
valores exactos de las constantes del circuito. Para el motor de inducción
en la tabla de la figura (3.1), los valores de a en los circuitos de tipo T-I
y T-tr sonrespesfiyem€nte 0.984 y 1.038.
Los tipos de circuitos expuestos anteriormente son válidos para estado
estable cuando p: j o, y se sustituyen en las ecuaciones 5.5 y 5.8 los
circuitos equivalentes de estado estable, se obtienen como en el capitulo 3.
6. CONCLUSIONES
Lz teona del vector espiral puede ser apücada al estudio de los circuitos
eléctricos, tanto con estado estable como el transitorio, como se demostó
en el numeral 1.4
Este método es muy semejante al método fasorial, pues las variables
pueden ser descrit¿s como vectores estacionarios en el plano complejo;?
con la diferencia que el método espiral depende del tiempo.
En el estuüo de circuitos eléctricos el método del vector espiral, conüerte
en vectores espirales la corriente o voltaje, de tat forma que éstas
variables son validas para los dos estados, estable y transitorio, mientras
que el método convencional utiliza fasores pam estado estable y
ecuaciones diferenciales para el hansitorio.

129
El método del vector espiral aplicado al motor de Inducción presenta dos
grandes ventajas, en primer lugar unifica el estado estable y el transitorio y
en segundo lugar simplifica el estudio de ambos estados, mediante el
método de separación de fases.
El presente método, brinda la oportunidad de estudiar los fenómenos
transitorios del motor de Inducción, en forma sensilla, cuando éste es
controlado por la corriente de entrada o por voltaje de entrad4 ya que el
proceso analítico es casi el mismo que en el estado estable.
Las ecuaciones resultantes del confrol del motor de Inducción, cuando es
controlado por corriente de entrada, tiene como variable la frecuencia de
deslizamiento, pero no tiene directamente la velocidad del motor, esto
indica que el transitorio electromagnético puede ser independiente de la
velocidad del motor, esta independencia es muy importante ya que indica
que el transitorio elecfromagnético dentro del motor se puede anahzar
separadamente del sistema dinámico producido por este.
tfrrlvcnldrd lrrl6¡om¡ ¡le Oujd¿abstccl0tr s¡BLloItcA

130
Al inicio del proyecto se pensó comparar éste método con el método del
vector espacial, en el estado transitorio; sinembargo los resultados finales
demostraron que esta comparación no es posible; pues el método del
vector espiral analiza el estado transitorio, como por ejemplo en el
¿uranque del motor. El método del vector espiral está más orientado al
control y al análisis transitorio cuando el motor ya está en
funcionamiento, hallandose los tiempos de respuestas del motor ante
perturbaciones.
Las simulaciones hechas en este texto, en circuitos y en el motor de
Inducción" se realizaron en Exel.
GLOSARIO
V
I
: Vector circular de voltaje
: Vector circular de corriente
: Operadordiferencial * Urt
Angulo de desfase
Flujo mutuo
: Inductancia mutua
Inductancia del pnmano
Inductancia del secundario
Inductancia mutua del primario
Inductancia mutua del secr¡ndario
Frecuencia angular del primario
Frecuencia angular del secr¡ndario
p
I
)"
M
L1
L2
l1
lz
(t)1
@2
cD m : Velocidad angular del motor
0 : Angulo entre el estator y el rotor
s - Deslizamiento
ú) : Velocidad angular sincrónica
X 1 : Reactancia del primario
X 2 : Reactancia del secundario
X. : Reactancia excitante
P : Número de Polos
P : Potencia
T : Torque

ANEXO I
CALCULO DE LAS CONSTANTES A T Y A Z
DEL CIRCUITO RLC
Las ecuaciones 2.12 y 2.14 delnumeral 2.1 se reescriben:
lil0:Ar+Az+Ji+"j(v-e)J Ct)
(r.1)
0: (-cr + jB)Ar +(-o -jB)Az+J-z lil.j(q-o) (t.Z)
Despejando de (I.1) V G.2) A r se tiene
Jrl'lAr :-A, _ --;=. j(e-e)
(I.4)JÚ)
Igualando (I.3) y (I.4)

alrl(o+jP)Ar-J-z lr lej(q-e): (a-jp) Az + (a-jU),#rj(e-o)
Donde:
Ar:( t + 1 \ |- \2iB (a-iiltrü,ilJTli
Az: # ol| ',,q-o)(ar
-2i-g)
: (at-F-aj),ll .j(e-e)2P ja
:(r#r;# #r)al{":e + * úr) olil ""*-'
Az : 1- @ +li :ati) Jrlil .,,*-tr
il.:t* 'e¡ - JrH, j(c-e)
.j(e-e)
(p-o)
(r.s)
Reemplazando A 2 en ( L3 ) se tiene:
A1 : - (-"!!l--'i) Jt

: - J-zl ti t j(q-o) qj - F + a¡ + 2F2Faj
: -Jt
t;- - 1Z
At: Ji
,1 ., o-u (:":' ei : E-. z e¡)
I rl .j(q-0, (,- " _
oi;',)
rl ., <* u (rg * lti ':\ (r.6)

ANEXO II
EL VECTOR ESPIRAL Y LA TRANSFORMACION DE
LAPLACE
Cuando las variables de estado se expresan como vectores espirales el
método de la tansformación de Laplace es fácil de aplicar. Como
ejemplo se resolverá la ecuación (1.7), usando la transformación de
Laplace. Escribimos la ecuación (1.2) como (tr.1).
. j (co t+ v) (u.1)
-ll^l2lvlet'p
s- J ú, (II'2)
dzi dia -
+ U ]: + ci : J2dt- dt V
a ¡s 2I(s) - s I(0) - r' (0)l+ b [s r(s) - (0)] + c r(s) :
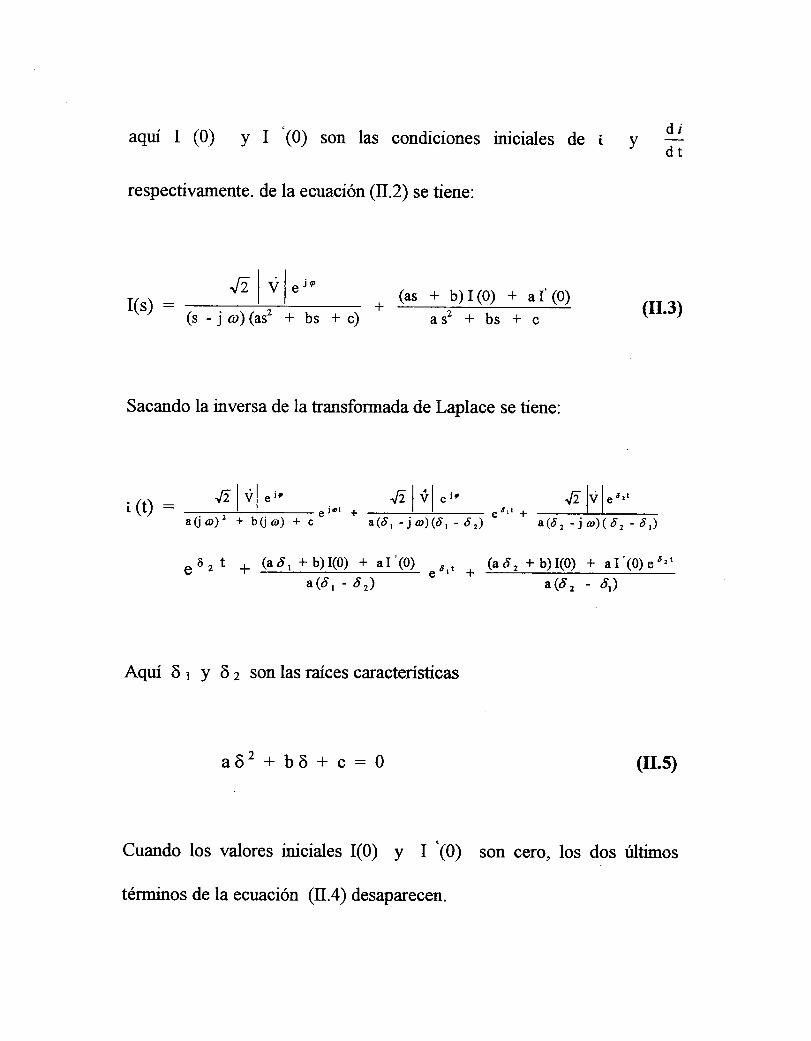
aquí I (0) y
respectivamente.
I (0) son las condiciones iniciales de i
de la ecuación (II.2) se tiene:
dtv' dt
t;alL V eJPI(s) :
G - j at)(as' + bs * c)
(as + b)I(0) + aI'(0)as' + bs + c
Sacando la inversa de la fransformada de Laplace se tiene:
Aquí 6r y 62 sonlasraícescaracterísticas
a62 + b6 + c:0
Cuando los valores iniciales I(0) y I '(0)
términos de la ecuación (tr.4) desaparecen.
(Ir.3)
eátt +
(a6, +b)I(0) + aI'(0)et"'a(6, - 4)
(r.s)
-l ,l -l.li(t): Jzlvl e¡' ajo,* Jzlvl e¡'ajcü'+ f(a) + c- a(á, -ja)(6r-6r)
o D, t + (aá, + b)(0) + aI'(0) ó.rv u(a,-6r¡ "' T
a(6r-jro)(6r-6r)
son cero, los dos ultimos
Cuando se usan vectores espirales, el método de transformado de Laplace
dá una solución de estado estable y tansitoria simultaneamente en fonna
de vector espiral, satisfaciendo las condiciones iniciales. Justamente una
formula de transformación de Laplace para una exponencial en fi¡nción del
tiempo es suficiente para resolver el circuito de la ecuación, en la mayor
parte de los casos.

ANEXO III
CORRIENTES EN ESTADO ESTABLE EXPRESADAS EN
VECTORES CIRCULARES
Del circuito equivalente de la figura (3.2) del nr¡meral 3.3 se tienen las
siguientes ecuaciones :
V, : i,(R, + jX, + jX-) + Írj'X-
0 : (Rz/s + j(Xz + X.)i, + jX-i',
Despejando de (m.2) | 2 se obtiene:
(rrr.r)
(rrr.2)
O6;¡¿¡ rut6nom¡ do octldcnh
sEccloN ElBLl0ltc^
(rrr.3)
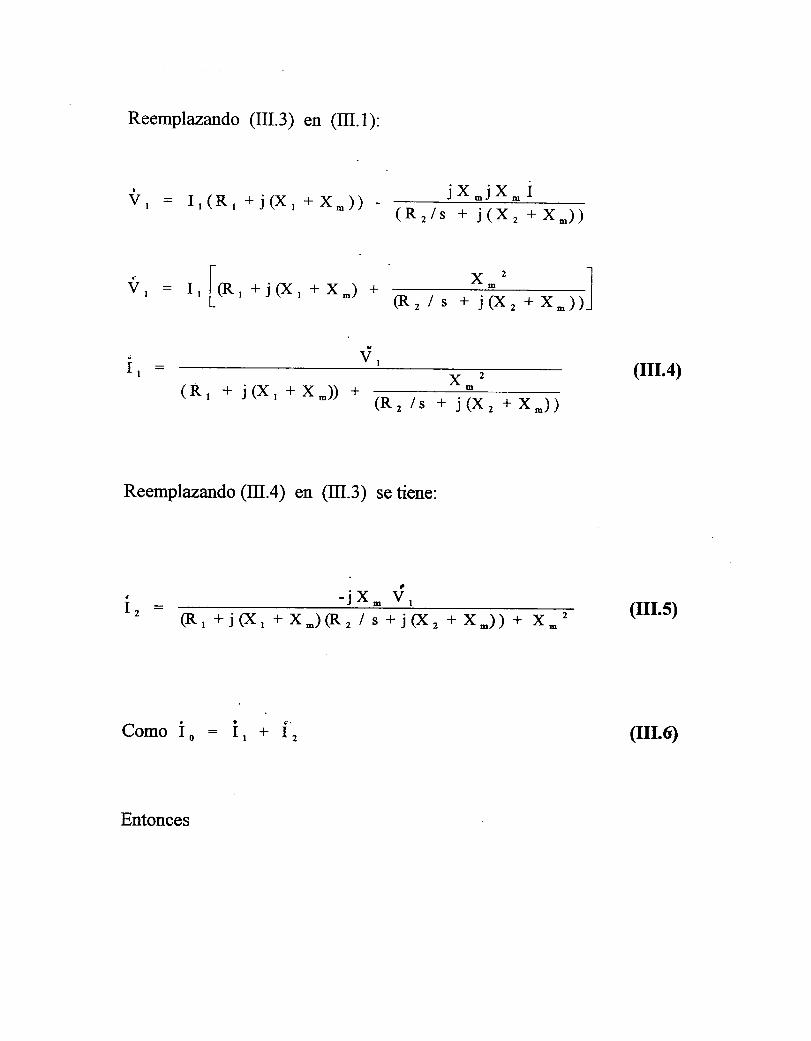
Reemplazando (III.3) en (Itr.l):
ü, : I,(R,+i(X,+X-)) - jX'jX-i(Rr/s + j(X, +X-))
ü, : ,,[*, + j(X, *X2X I
I
_II)l
'Jz * X-)(R, / s + j(X-)+
vrÍ, (rrr.4)
Reemplazando (m.4) en (Itr.3) se tiene:
f-tr-jX^ Vr
' (R, +i(Xr * X-)(R 2 / s +iCX' + X-)) + X_' Grr.s)
. a a.
Uomo Io : Ir + Iz
Entonces
(rrr.6)
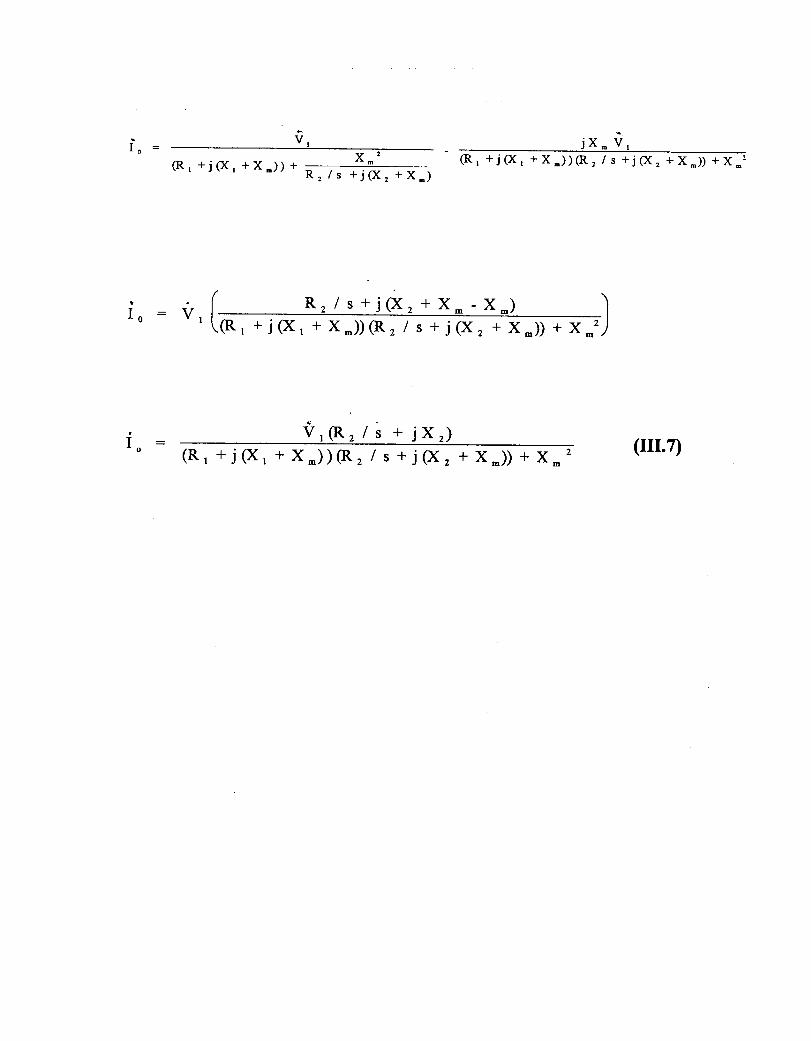
lo V JX. V,v2--(R'+j(X,+X.))+=-;*(R'+jCX,+x.))(R,/3+jCX,+X-))aX.'
R, /s +j(X, +X-)
i^: r; I R,/t.¡tx'.x--x; )v ¡ \(R, + j(x, + x-))(R, / s + jcx 2 +x-)) + x^r)
a'
Í : V'(R'/s + jXr) - (,ll.7)^o (R,+j(X,+X_))(Rr/s+j(Xr+X-))1X-z I
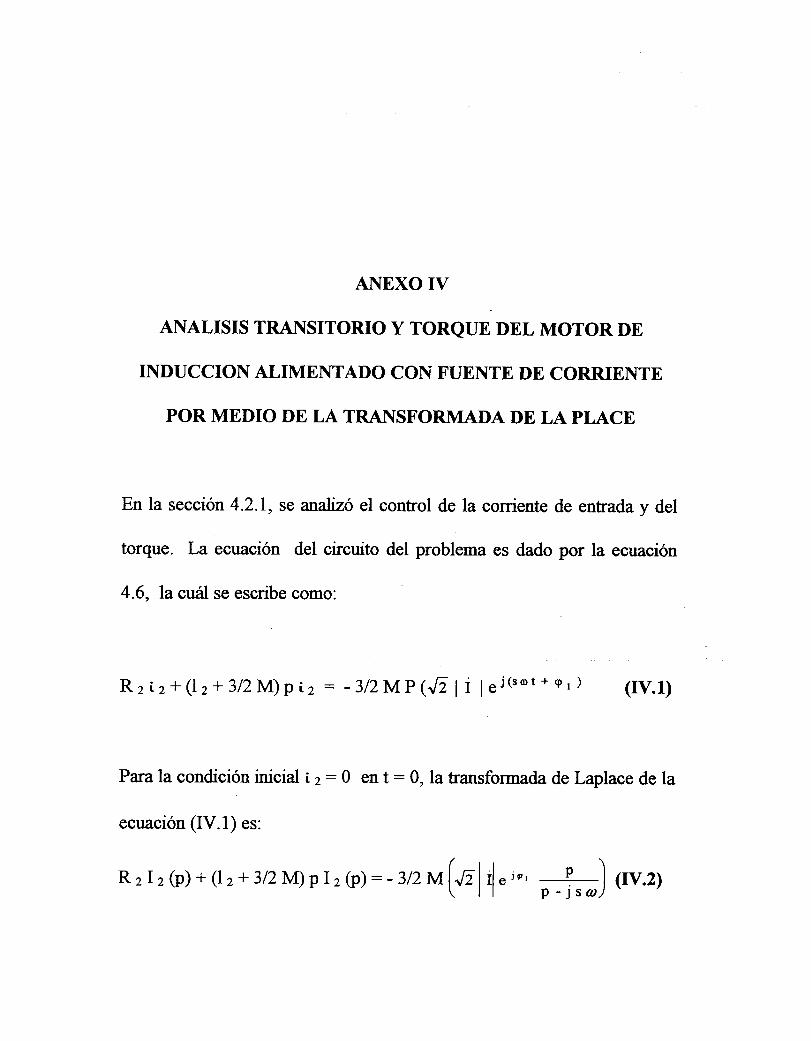
ANEXO IV
ANALISIS TRANSITORIO Y TORQUE DEL MOTOR DE
II\DUCCION ALIMENTADO CON FUENTE DE CORRIENTE
POR MEDIO DE LA TRANSFORMADA DE LA PLACE
En la sección 4.2.1, se analizf el confrol de la corriente de entada y del
torque. La ecuación del circuito del problema es dado por la ecuación
4.6, la cuál se escribe como:
Rz i z+(12+3l2I4p í2 : -3l2MP(J, I i le j(sort + er ) (IV.l)
Pa¡a la condición inicial i z : 0 en t: 0, la transformada de Laplace de la
ecuación (IV.l) es:
RzIz6l)+(lz+ 3/2M)pIz6l):-3t2r¡(Ol ,l ",,, .=J Uv.z)\ ll p-Js(D)
Aquí, I z b) es la hansfonnada de Laplace de i 2, y p se reemplaza por s
para eütar confi¡ndirse con el deslizamiento s. Reescribiendo la ecuación
(IV.2), se llega a:
Iz(p): - ttz¡¡Jllil"',' - | ¡l-3/2M Jzltle¡'' p (rv.3)Rr+0r3/2lvI)p lz+3/2M p+Ac p-jsat
t,@): lz + 3/2M
p
p - jsa¡
R2
I""l s:t,-l
toa)
+
sJ
o)s
It.\J
siot + ;1". "'r.,.lAc + lsco )iz(t): l2 + 3/2M
i z (t) - -ttz:v.lí '1""' I is ¿¡(l . + 3lzlvl)I r " \ z - - - -t ir-t
\Rr+js¿¡02+3/2M- R, +jsarQ,
-
é -:.t+ 3l2M) -lz + 3/2M
iz (t) : - Jrlr,lt,ii,i, "i(ro,-
e,.,,.1,) - -#"'..,(Iv-4)
Haciendo la transformación de Laplace inversa, se llega a
-3/2MJ'
Donde:

Zz: Rz + jsro(lz+ 3l2M) : lz,l .,t' (ry.s)
El torque por fase es dado de la ecuación (4.11) como sigue:
r1 :'AMp Re [-jitl R.Iiz]
T1:tAp i,l' Wf rcoso,- cos(2súrt + 2e, - e)l - ffi il)
e -r"t [sen(solt + 2q, -0 r)+sen(salt+e r)] (rv.6)
En esta ecuación g 1 tiene una fase difere,nte de + 2/3 ¡ entre las fases
trifasicas. Los téminos seno y coseno que contienen g r entre fases
trifasicas se cancelan y el torque de la fase trif¿ísica es:
r3 : 9/41\El i,l,lrr?t,'rcosd. - 3/2Ml''l I lz,l ----' r2+3/zM * ,,') (Iv.4R2
t-elZ rl
'¡'t se,n(s at
Puesto que tang 0 z : s ol (l ,+ 3/2 M)/R 2, t 3 os cero en t:0, como se
muestra en la figura 4.2. El torque r 3 de la ecuación (IV.7) es dado
por:
r3:9/8MPRe[-ji1il]:9/8MpI.Iir il] (IV.B)
Donde r ^Ízl denota el coeficiente (real) de la parte imaginaria de z y *
indica el conjugado complejo.

ANEXO V
FORMULAS MATEMATICAS
Cos (a tb) : cos a cosb + sen a sen b
Cos (-a) : cos a
sen (-a) : cos a
sen (-a) : - sen a
^ 2n ILOS
-: --32
Operaciones con Complejos
Sean Zt: a + bj zr Zz: c+dj
2n ^ltSgn-:-32

21x Zz: (a r c) + (d rb)j
21 * Zz: (a*c - b*d) + (a*d + b*c)iZt _(a*c+b*d) + (b*c-a*d).Z2 c'+ ¿z ' -cl-+ ¿-, .l
Z1: a+bj
21:r(cos0+jsen0)
Zt: rejt pot Taylor
Zi : r" (cos n0 + j sen ne)
r:lz,l :",61 *b'
a:rcos0
b:rsen0
BIBLIOGRAFIA
1. ALGER, P. lnduction Machines. 2 edición, Gordon and Breach.
New york 1970.
2. ARYA, Jagdish; LARDNER, Robin. Matemáticas Aplicadas
2 edición. Pretice-Hall Hispano¡mericana, S.A. lgg7.
3. CHAPMAN, s.J. Máquinas Eléctricas. McGraaw-Hill. New york
1987
4. FTTZGERALD, A.E. and KINGSLEY, C. Electric Machinery.
Mcgraw-Hill, New York 1952.
5. HSYT,w.H and I(EMMERLY, J.E. Anárisis de circuitos en
Ingeniería. McGraw-Hill. cuata edición New york l9gg.
6. IvA iov, A. Máquinas Eléctricas, tomo 3. editorial Mir. Moscú
1984.
7. LYON, w.v. Transient Anaysis of alternating current Machinery
9.
10.
11.
Wiley. 1954.
MICHALINK, W; HANSENPUSH, A; JANISZEWSKI, A. Idenfications of Induction Motor Parameters in dina:nic state. przeglodElecüotechniczny. Holanda 1993.
QUISPE' E. Modelos Matemáticos para el Analisis Transitorio deMáquina Asincrónica. Infonne Final proyecto de Investigación.CUAO. Colombia 1994.
QUISPE o, E.c and FER|IANDES, L. Navas, J. Modelamis¡1s yAnillisis Transitorio del Motor de Inducción Usando el Método delVector Espacial. CUAO. Colombia 1995.
STEINIVIETZ, C.P and ALBERT, L. Lectures an Electrical Eng-neering. vol 3. Transient Electrical Fhenomena. New york l9gg.
12- VILA.c, R.o Analisis de circuitos. uIS. colombia 1990.
13. woLL ERSHCIM, A.H.M.L. An Equivalent Dinamic Model for aGroup of Induction Motors. Energiete chniek. New york lgg3.
14. YAMAMURA, s. Transient analysis of AC Machine by Means ofSpiral vector Method. Trans IFE. Japon, 8-105, 5gl. 19g5.
15. YAMAMURA, s. Modern Thory of AC Motors: phese segregaüonMethod, d.r Vector Method and field acceleration Method. proc.INCEMDAS'8ó. I98ó.
16. YAMAMURA, s. Spiral vector Theory of circüts and MachinesClarendon Press. a,xford. Japon lgg2.
17. YAMAMURA, s. and NAKAGAWA, s. Transient Aniilisis andcontrol of cA servomotor-proposal of fiel Aceleracion Methodf¡ans. ITF' J¿ps¡ B. l0l, 557. l9g0