guzm n granados jorge enrique 95213282148.206.53.84/tesiuami/uami14524.pdf · 3.3 patrones de...
TRANSCRIPT

Alumno: Jorge Enrique Guzmán Granados Asesores: Prof. Othón Gandarilla Carrillo Prof. Yudiel Pérez Espejo

1
ÍNDICE
Índice 1 Introducción 2 1 Antenas 2 1.1 El espectro electromagnético 3 1.2 Diagramas de radiación 4 1.3 Teoría 6 1.4 Densidad de potencia radiada 6 1.5 Directividad 7 1.6 Polarización 8 1.7 Adaptación 9 1.8 Ecuación de transmisión 10 2 Antenas helicoidales 11 2.1 Aplicación de antenas helicoidales 14 2.2 Sistema se navegación GPS 15 2.3 GPS diferencial 19 2.4 Aplicaciones 21 3.1 Fabricación de una antena helicoidal de 2.4 GHz 22 3.2 Teoría 27 3.3 Patrones de radiación 32 3.5 Simulaciones 35 4 Implementación de un arreglo helicoidal 37 Bibliografía 40
2
INTRODUCCION
ANTENAS
Las Antenas son las partes de los sistemas de telecomunicación específicamente diseñadas para radiar o recibir ondas electromagnéticas. También se pueden definir como los dispositivos que adaptan las ondas guiadas, que se transmiten por conductores o guías, a las ondas que se propagan en el espacio libre. Los sistemas de Comunicaciones utilizan antenas para realizar enlaces punto a punto, difundir señales de televisión o radio, o bien transmitir o recibir señales en equipos portátiles. Los primeros sistemas de comunicación eléctricos fueron la telegrafía, introducida en 1844, seguida por la telefonía, en el año 1878. En estos sistemas, las señales se enviaban a través de líneas de transmisión de dos hilos conductores, que conectaban el emisor con el receptor. La teoría de las antenas surge a partir de los desarrollos matemáticos de James C. Maxwell, en 1854, corroborados por los experimentos de Heinrich R. Hertz, en 1887, y los primeros sistemas de radiocomunicaciones de Guglielmo Marconi en 1897. La primera comunicación transoceánica tuvo lugar en 1901, desde Cornualles a Terranova. En 1907 ya existían servicios comerciales de comunicaciones. Desde la invención de Marconi, hasta los años 40, la tecnología de las antenas se centró en elementos radiantes de hilo, a frecuencias hasta UHF. Inicialmente se utilizaban frecuencias de transmisión entre 50 y 100 Khz., por lo que las antenas eran pequeñas comparadas con la longitud de onda. Tras el descubrimiento del tríodo por De Forest, se puedo empezar a trabajar a frecuencias entre 100 Khz. y algunos MHz, con tamaños de antenas comparables a la longitud de onda. A partir de la Segunda Guerra Mundial se desarrollaron nuevos elementos radiantes (como guiaondas, bocinas, reflectores, etc.). Una contribución muy importante fue el desarrollo de los generadores de microondas (como el magnetrón y el klystron) a frecuencias superiores a 1 GHz. En las décadas de 1960 a 1980 los avances en arquitectura y tecnología de computadores tuvieron un gran impacto en el desarrollo de la moderna teoría de antenas. Los métodos numéricos se desarrollaron a partir de 1960 y permitieron el análisis de estructuras inabordables por métodos analíticos. Se desarrollaron métodos asintóticos de baja frecuencia (método de los momentos, diferencias finitas) y de alta frecuencia (teoría geométrica de la difracción GTD, teoría física de la difracción PTD). En el pasado las antenas eran una parte secundaria en el diseño de un sistema, en la actualidad juegan un papel crítico. Asimismo en la primera mitad del siglo XX se utilizaban métodos de prueba y error, mientras que en la actualidad se consigue pasar del diseño teórico al prototipo final sin necesidad de pruebas intermedias.

3
El espectro electromagnético Las ondas electromagnéticas se caracterizan por su frecuencia y longitud de onda. El conjunto de todas las frecuencias se denomina espectro.
Figura 1
Las ondas se clasifican por bandas. Las denominaciones de las bandas de frecuencia se pueden realizar por décadas, como por ejemplo MF, HF, VHF, UHF.
Figura 2
En Televisión y FM se utilizan otras denominaciones como Banda I, Banda II, Banda III, IV y V.
Figura 3
4
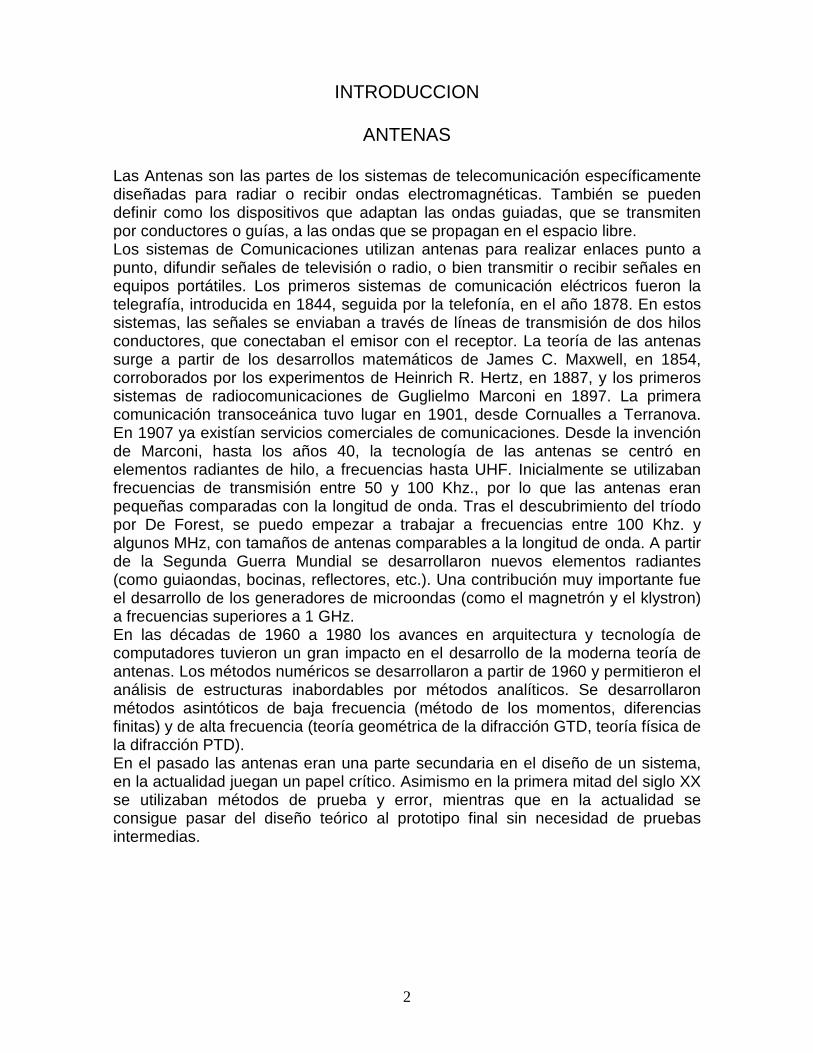
A frecuencias de microondas se utilizan otras denominaciones, como bandas L, C, S, X, que provienen de los primeros tiempos del radar.
Figura 4
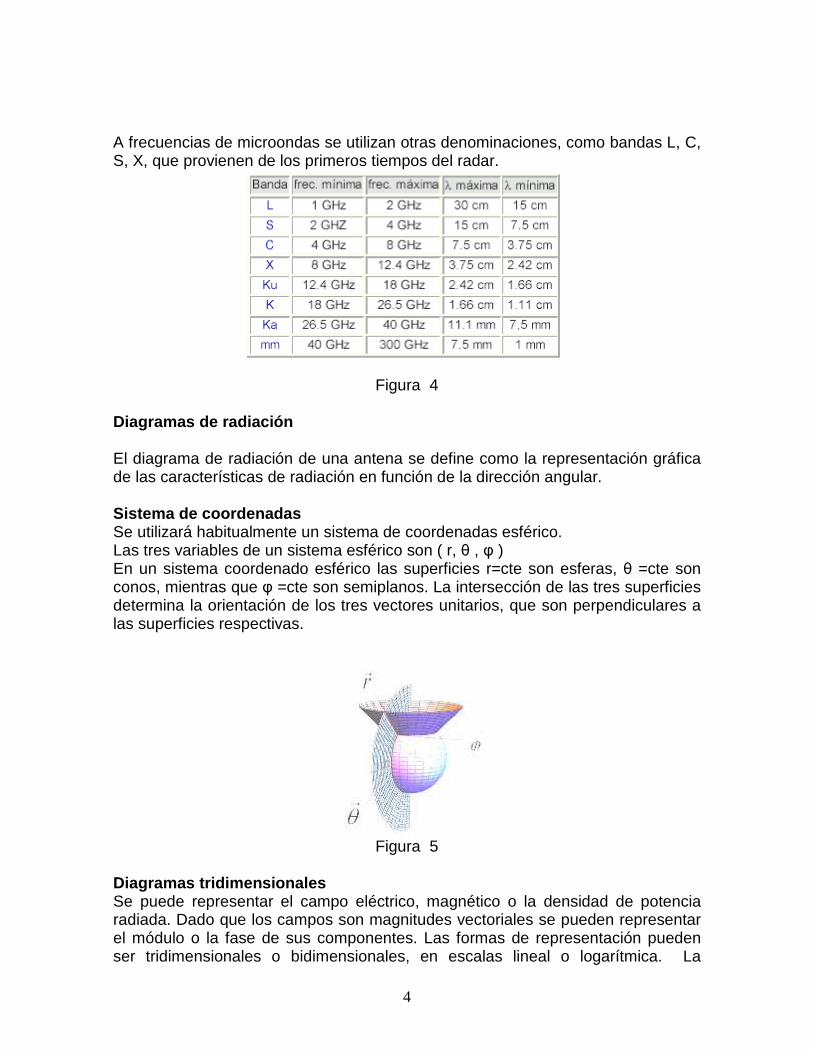
Diagramas de radiación El diagrama de radiación de una antena se define como la representación gráfica de las características de radiación en función de la dirección angular. Sistema de coordenadas Se utilizará habitualmente un sistema de coordenadas esférico. Las tres variables de un sistema esférico son ( r, θ , φ ) En un sistema coordenado esférico las superficies r=cte son esferas, θ =cte son conos, mientras que φ =cte son semiplanos. La intersección de las tres superficies determina la orientación de los tres vectores unitarios, que son perpendiculares a las superficies respectivas.
Figura 5
Diagramas tridimensionales Se puede representar el campo eléctrico, magnético o la densidad de potencia radiada. Dado que los campos son magnitudes vectoriales se pueden representar el módulo o la fase de sus componentes. Las formas de representación pueden ser tridimensionales o bidimensionales, en escalas lineal o logarítmica. La

5
siguiente figura es la representación tridimensional de los campos radiados por una antena. Dada la dificultad de representar gráficamente el diagrama tridimensional se opta por representar cortes del diagrama en coordenadas polares o cartesianas. Los cortes corresponden a la intersección del diagrama 3D con planos.
Figura 6

6
TEORÍA
Parámetros Fundamentales de las Antenas Densidad de potencia radiada La densidad de potencia radiada se define como la potencia por unidad de superficie en una determinada dirección. Las unidades son vatios por metro cuadrado. Se puede calcular a partir de los valores eficaces de los campos como
(1.1) La relación entre el módulo del campo eléctrico y el módulo del campo magnético es la impedancia característica del medio
(1.2) Por lo tanto, la densidad de potencia radiada también se puede calcular a partir de las dos componentes del campo eléctrico.
(1.3) La potencia total radiada se puede obtener como la integral de la densidad de potencia en una esfera que encierre a la antena.
(1.4) La intensidad de radiación es la potencia radiada por unidad de ángulo sólido en una determinada dirección. Las unidades son vatios por estereorradián. Dicho parámetro es independiente de la distancia a la que se encuentre la antena emisora. La relación entre la intensidad de radiación y la densidad de potencia radiada es
(1.5) La potencia total radiada se puede calcular integrando la intensidad de radiación en todas las direcciones del espacio.
(1.6)

7
Directividad La Directividad de una antena se define como la relación entre la densidad de potencia radiada en una dirección, a una distancia, y la densidad de potencia que radiaría a la misma distancia una antena isotrópica,, a igualdad de potencia total radiada.
(2.1 ) Si no se especifica la dirección angular, se sobreentiende que la Directividad se refiere a la dirección de máxima radiación
( 2.2) La directividad se puede obtener en general a partir del diagrama de radiación de la antena
O bien (2.3 ) W se define como el ángulo sólido equivalente. Para antenas directivas, con un solo lóbulo principal y lóbulos secundarios de nivel despreciable, se puede obtener una directividad aproximada considerando que se produce radiación uniforme en el ángulo sólido definido a partir de los anchos de haz a –3dB en los dos planos principales del diagrama de radiación.
(2.4 ) Ganancia La ganancia de una antena se define como la relación entre la densidad de potencia radiada en una dirección y la densidad de potencia que radiaría una antena isotrópica, a igualdad de distancias y potencias entregadas a la antena.
(2.5 ) Si no se especifica la dirección angular, se sobreentiende que la Ganancia se
refiere a la dirección de máxima radiación.
(2.6) En la definición de Directividad se habla de potencia radiada por la
antena, mientras que en la definición de ganancia se habla de potencia entregada a la antena. La diferencia entre ambas potencias es la potencia disipada por la antena, debida a pérdidas óhmicas. La eficiencia se puede definir como la relación entre la potencia radiada por una antena y la potencia entregada a la misma. La eficiencia es un número comprendido entre 0 y 1. La relación entre la ganancia y la directividad es la eficiencia
( )

8
Si una antena no tiene pérdidas óhmicas, la Directividad y la Ganancia son iguales. Polarización La polarización de una antena es la polarización de la onda radiada por dicha antena en una dirección dada. La polarización de una onda es la figura geométrica determinada por el extremo del vector que representa al campo eléctrico en función del tiempo, en una posición dada. Para ondas con variación sinusoidal dicha figura es en general una elipse. Hay una serie de casos particulares. Si la figura trazada es una recta, la onda se denomina linealmente polarizada, si es un círculo circularmente polarizada. El sentido de giro del campo eléctrico, para una onda que se aleja del observador, determina si la onda está polarizada circularmente a derechas o a izquierda. Si el sentido de giro coincide con las agujas del reloj, la polarización es circular a derechas. Si el sentido de giro es contrario a las agujas del reloj, la polarización es circular a izquierdas. El mismo convenio aplica a las ondas con polarización elíptica. Se define la relación axial de una onda polarizada elípticamente, como la relación entre los ejes mayor y menor de la elipse de polarización. La relación axial toma valores comprendidos entre 1 e infinito. Los campos se pueden representar en notación fasorial. Para determinar la variación temporal es suficiente con determinar el valor real de cada una de las componentes. Los ejemplos que se citan a continuación son para ondas planas que se propagan en la dirección del eje z. Las expresiones siguientes representan campos con polarización lineal
(3.1) Las expresiones siguientes representan campos con polarización circular, la primera a izquierdas y la segunda a derechas
(3.2) Finalmente los siguientes ejemplos corresponden a polarizaciones elípticas
(3.3) Se produce una polarización lineal cuando las fases de dos componentes ortogonales del campo eléctrico difieren un múltiplo entero de p radianes. Se produce polarización circular cuando las amplitudes son iguales y la diferencia de fase entre las componentes es p/2 o 3p/2. La polarización es elíptica en los demás casos. Cualquier onda se puede descomponer en dos polarizaciones lineales ortogonales, sin más que proyectar el campo eléctrico sobre vectores unitarios orientados según dichas direcciones. Aplicando el mismo principio, cualquier onda se puede descomponer en dos ondas polarizadas circularmente a derechas o izquierdas. Por ejemplo la siguiente expresión representa una onda polarizada elípticamente a derechas, con relación axial 3.

9
(3.4) Se puede descomponer en dos ondas polarizadas linealmente de amplitudes 3 y –1, o bien en dos ondas polarizadas circularmente a derechas e izquierdas
(3.6) Resolviendo el siguiente sistema de ecuaciones se determinan los valores de A y B: A+ B=3 A –B=1 Los valores son A=2, B=1. La impedancia de una antena se define como la relación entre la tensión y la corriente en sus terminales de entrada. Dicha impedancia es en general compleja. La parte real se denomina resistencia de antena y la parte imaginaria, reactancia de antena.
(3.7) Se define la resistencia de radiación como la relación entre la potencia total radiada por una antena y el valor eficaz de la corriente en sus terminales de entrada, elevada al cuadrado. Se refine la resistencia óhmica de una antena como la relación entre la potencia disipada por efecto de pérdidas resistivas y la corriente en sus terminales al cuadrado. Por lo tanto la resistencia de antena la podemos considerar como la suma de la resistencia de radiación y la resistencia óhmica.
(3.8) La eficiencia de una antena se puede obtener a partir de las resistencias de radiación y óhmicas, teniendo en cuenta que es la relación entre la potencia total radiada y la potencia entregada a la antena.
(3.9) Adaptación Las antenas receptoras tienen un circuito equivalente de Thevenin, con una impedancia de antena y un generador de tensión. La transferencia de potencia entre la antena y la carga es máxima cuando ambas impedancias son complejas conjugadas.
(4.1) En general, si no hay adaptación, la potencia recibida por una carga R L + jX L conectada a una antena de impedancia R a + jX a se puede calcular como
(4.2) Se define el coeficiente de adaptación como la relación entre la potencia recibida y la potencia que se recibiría en el caso de máxima transferencia de potencia. Toma valores entre 0 y 1.

10
(4.3) Área y longitud efectivas El área efectiva se define como la relación entre la potencia recibida y la densidad de potencia incidente en una antena. La antena debe estar adaptada a la carga, de forma que la potencia transferida sea la máxima. La onda recibida debe estar adaptada en polarización a la antena.
(4.4 ) La longitud efectiva de una antena linealmente polarizada se define como la relación entre la tensión inducida en una antena en circuito abierto y el campo incidente en la misma.
(4.5 ) Ecuación de transmisión Consideremos un enlace de comunicaciones entre dos puntos, con dos antenas separadas una distancia r. Si la antena transmisora fuera isotrópica, es decir si la potencia transmitida se repartiera por igual en todas las direcciones del espacio, la densidad de potencia en cualquier punto sería
(5.1 ) En un caso real la antena transmisora es directiva, por lo que para calcular la densidad de potencia hay que tener en cuenta la definición de directividad
(5.2 ) La potencia recibida en una antena, en el caso de tener adaptación será
(5.3 ) Si las antenas transmisora y receptora están orientadas en la dirección de los máximos de los diagramas de radiación, la expresión final será
(5.4 ) La relación entre el área efectiva y la directividad de cualquier antena, es:
(5.5 ) La ecuación de transmisión queda finalmente como
(5.6 )

11
ANTENAS HELICOIDALES
Estas antenas son usadas normalmente en radios de comunicación portátiles en las bandas de baja frecuencia (30 a 150 MHz), con el fin de reducir el tamaño del radiador a longitudes confortables. Con una adecuada selección de parámetros, el dipolo helicoidal de modo normal, es una estructura de radiación eficiente, con desempeño de patrón y de ganancia similar a los dipolos de media onda. El ancho de banda de un dipolo helicoidal pequeño y eficiente es menor que el ancho de banda de una antena de media onda debido a su factor Q más alto, que depende del número y del diámetro de las vueltas de la antena. La aplicación de las antenas helicoidales en la banda de los 800 a 900 MHz, además de la pérdida de ganancia, presenta otra desventaja respecto a su uso en frecuencias menores. Si el encapsulado es más largo que un cuarto de longitud de onda, parte de las corrientes del encapsulado, estará en oposición con las corrientes de la antena dando como resultado pérdida de ganancia en el horizonte. Los primeros modelos de celulares portátiles tienen un encapsulado de unos 20 cm. de largo. En lo que se refiere a mediciones en el patrón de radiación de la antena helicoidal de un teléfono portátil cerca de la cabeza de un humano, muestra una pérdida de ganancia promedio de unos 12 dB con respecto a un dipolo en el espacio libre de media onda. Las pérdidas en el patrón de radiación y en RF causan que las antenas helicoidales sean difíciles de usar en las aplicaciones de radio celular en la banda de los 800 a 900 MHz, excepto por el tamaño reducido de la antena, lo cual las hace muy atractivas para aparatos pequeños. La mayoría de los problemas que existen para las antenas helicoidales se presentan en las antenas de lazo de un cuarto de onda, aunque su patrón de radiación es ligeramente más eficiente. Debido a que no existe una verdadera ventaja en usar antenas de lazo de un cuarto de onda sobre las antenas helicoidales, las antenas de lazo han gozado de aceptación en el mercado de los teléfonos portátiles.
12
DIVERSIDAD DE ANTENAS
El pobre desempeño de las antenas helicoidales para teléfonos portátiles pequeños en la banda de 800 a 900 MHz ha forzado a los diseñadores a fabricar un radiador alternativo para las antenas helicoidales pequeñas. Las antenas usan dos hélices: una hélice primaria fija de aproximadamente 2 cm de largo (longitud eléctrica de un cuarto de onda) y una hélice resonante secundaria de unos 10 cm (longitud eléctrica de media onda) que pueden ser comprimidas en el encapsulado del radio. Una vez que son extendidas, la hélice secundaria se convierte en el radiador dominante, debido a que es libre de pérdidas causadas por la mano del usuario que sostiene el aparato.
La hélice secundaria es alimentada por la antena primaria y presenta un excelente desempeño en el espacio libre, dependiendo de su propia longitud y de las pérdidas debidas a la resistencia en el alambre de metal de que está hecha la hélice. En el extremo de la antena secundaria hay una barra dieléctrica de 2 cm de largo para desacoplar las dos hélices, cuando la antena secundaria se encuentra retractada, logrando de esta manera que la inducción de RF sea mínima en el encapsulado a través de esa trayectoria. Este arreglo especial ha proporcionado una mejora en el rango de comunicación en los teléfonos de bolsillo con antenas helicoidales. Aunque el desempeño de estas antenas está lejos de ser el óptimo, el teléfono celular de bolsillo se ha vuelto extremadamente popular, lo cual demuestra que la perfección en la ingeniería no es siempre una condición para lograr éxito en el mercado.
Sistemas de antenas para teléfonos portátiles.
Las dos principales características de diseño de cualquier antena para teléfono portátil son: que debe estar montada en el encapsulado de teléfono portátil y que durante la operación el aparato será manipulado por un humano, quién lo apuntará aleatoriamente hacia cualquier dirección. Debido a que la antena se coloca muy próxima al encapsulado, la corriente de la antena se induce no sólo en la antena misma, sino también en la parte conductora del encapsulado. Esta corriente de dispersión cambia la forma del patrón de radiación original. La eficiencia de radiación se degrada posteriormente por la proximidad de la antena al cuerpo humano, pues la antena necesariamente se usa cerca de un operador. La polarización del patrón de radiación también es afectada por los cambios en la dirección de la antena causados por los movimientos del operador. Estas dificultades de diseño imperativas se complican debido a la necesidad de desarrollar antenas muy pequeñas para cumplir con las demandas de equipo compacto y portátil; es bien sabido que la eficiencia de radiación y el ancho de banda se degradan conforme el tamaño de la antena se reduce. Además de estas imperativas de diseño, que no son comúnmente encontradas en aplicaciones de telefonía portátil, las consideraciones típicas como la seguridad del ancho de banda de la frecuencia especificada y la necesidad de sustentar la diversidad en la

13
recepción de la antena deben tomarse en cuenta. El principal problema que debe ser tratado es la ganancia efectiva de las antenas en un ambiente de propagación de multiruta. La clave está en el estudio de estos temas de manera sistemática y maximizar la ganancia efectiva lo más que sea posible en el rango de frecuencias deseado. Una alta ganancia efectiva permite que el tamaño y el peso se puedan reducir, mientras que el tiempo de uso se incrementa. No solamente permite que el teléfono portátil sea usado en áreas de baja intensidad de campo eléctrico, sino también permite que la potencia transmitida se reduzca. Esta reducción en la potencia transmitida es extremadamente efectiva en la reducción de la capacidad de la batería (el peso del teléfono portátil) o la extensión del tiempo de uso de la batería. Por lo tanto, la ganancia efectiva de las antenas montadas en un teléfono portátil debe ser examinada para desarrollar aparatos telefónicos pequeños y de alto desempeño.
SISTEMAS PORTÁTILES MANUALES
Muchas clases de teléfonos portátiles manuales han sido desarrolladas para la banda de sistemas de comunicaciones móviles terrestres de los 900 MHz. En Japón, por ejemplo, el ancho de banda va de los 870 MHz a los 940 MHz, las antenas para las estaciones base deben de ser de un ancho de banda relativo de 7.8 %. La antena más popular para las unidades portátiles manuales es la antena de lazo, que no solamente tiene características de ancho de banda relativamente amplias, sino que también se puede guardar dentro de la unidad. Además la antena de lazo tiene otras 3 ventajas: estructura simple, volumen pequeño y son de fácil instalación. Sin embargo, las corrientes de la antena son impresas no solamente en la antena misma, sino también en la parte conductora del encapsulado. Debido a lo anterior el patrón de radiación depende del tamaño del encapsulamiento. En el caso de las antenas de lazo de un cuarto de onda, las corrientes en la antena y el encapsulado no están en fase, y da como resultado un patrón de radiación con cuatro lóbulos de radiación vertical, y la degradación de la directividad en el plano horizontal es considerable. La ganancia efectiva depende principalmente de la longitud de la antena de lazo y la longitud de la parte conductora del encapsulado. Por lo que, en este tipo de unidades manuales portátiles, se puede optimizar el desempeño de la antena seleccionando las longitudes apropiadas.
figura 7

14
APLICACIÓNES DE ANTENAS HELICOIDALES
Sistema de navegación GPS
GPS (Global Positioning System) es un sistema de navegación por satélite consistente en una constelación de 24 satélites orbitando a una distancia de 20.200 km. Los primeros satélites empleados para la radionavegación fueron los de la serie estadounidense TRANSIT, un total de 10 que se terminaron de lanzar en el año 1964. El objetivo de este sistema fue el de proporcionar ayuda de navegación para los submarinos del tipo Polaris. Su funcionamiento se basaba en el desplazamiento de frecuencia (efecto Doppler) que sufría la señal recibida de los satélites como consecuencia del movimiento orbital de éstos. Posteriormente, conociendo las coordenadas de los satélites y esas desviaciones de frecuencia era posible calcular la posición del observador. No obstante, el principal inconveniente del sistema TRANSIT es que la medida era lenta y no podía ser utilizado por aeronaves. Para subsanar esta deficiencia, el departamento de defensa de los EE.UU. decide aprobar en 1973 el programa NAVSTAR-GPS (NAVigation System Time And Ranging - GPS), que pretendía proporcionar a los usuarios precisiones del orden de decenas de metros con cobertura continua en toda la superficie terrestre.
Así, en el año 1978 se lanzan los 4 primeros satélites de la constelación NAVSTAR que permitían posicionar un objeto sobre la superficie de la Tierra a partir de las señales de radio transmitidas por los satélites y procesadas en el equipo receptor, consiguiéndose precisiones dependientes del tipo de información recibida, tiempo de recepción y condiciones de la emisión. Diseñado en un principio con propósito exclusivamente militar, el sistema GPS junto con otros sistemas de navegación por satélite denominados RDSS han alcanzado en la actualidad gran número de aplicaciones de índole civil, tales como actividades de navegación aérea, marítima o terrestre que han supuesto un importante avance en la organización y en el estado de los transportes y las comunicaciones mundiales. Elementos del sistema
Como cualquier sistema de satélites, el sistema NAVSTAR-GPS se compone de tres segmentos distintos: segmento espacial, segmento de control y segmento de usuario. El segmento espacial es claramente el más costoso, formado por los satélites de la constelación NAVSTAR. Los satélites se sitúan en 6 órbitas elípticas casi circulares (excentricidad 0,03), semisíncronas y separadas entre sí 60º. Los planos orbitales tienen una inclinación de 55º con respecto al plano del ecuador y se nombran como A, B, C, D, E y F. Cada órbita contiene al menos 4 satélites (separados 90º entre sí), aunque puede contener más. Los satélites se sitúan a una altitud de 20.169 km sobre la Tierra y completan una órbita en 12 horas 58 minutos. De esta forma, se asegura una cobertura global ininterrumpida que permite la visibilidad de un mínimo de 4 satélites.
15
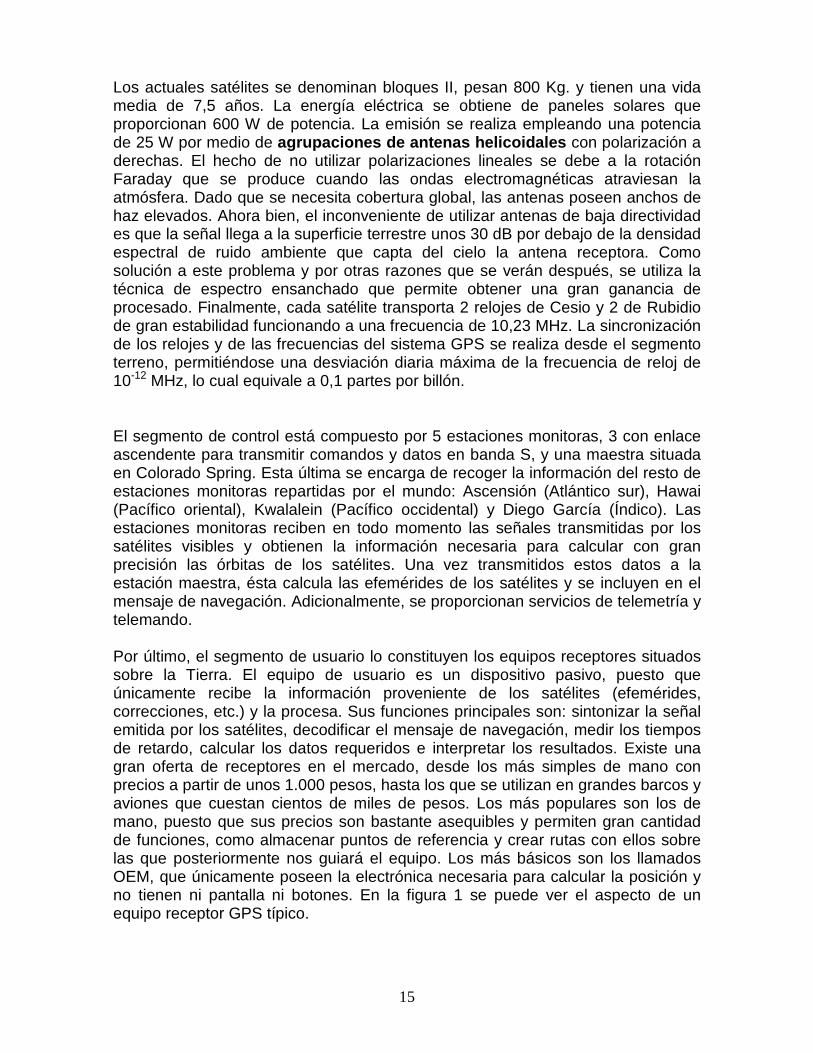
Los actuales satélites se denominan bloques II, pesan 800 Kg. y tienen una vida media de 7,5 años. La energía eléctrica se obtiene de paneles solares que proporcionan 600 W de potencia. La emisión se realiza empleando una potencia de 25 W por medio de agrupaciones de antenas helicoidales con polarización a derechas. El hecho de no utilizar polarizaciones lineales se debe a la rotación Faraday que se produce cuando las ondas electromagnéticas atraviesan la atmósfera. Dado que se necesita cobertura global, las antenas poseen anchos de haz elevados. Ahora bien, el inconveniente de utilizar antenas de baja directividad es que la señal llega a la superficie terrestre unos 30 dB por debajo de la densidad espectral de ruido ambiente que capta del cielo la antena receptora. Como solución a este problema y por otras razones que se verán después, se utiliza la técnica de espectro ensanchado que permite obtener una gran ganancia de procesado. Finalmente, cada satélite transporta 2 relojes de Cesio y 2 de Rubidio de gran estabilidad funcionando a una frecuencia de 10,23 MHz. La sincronización de los relojes y de las frecuencias del sistema GPS se realiza desde el segmento terreno, permitiéndose una desviación diaria máxima de la frecuencia de reloj de 10-12 MHz, lo cual equivale a 0,1 partes por billón.
El segmento de control está compuesto por 5 estaciones monitoras, 3 con enlace ascendente para transmitir comandos y datos en banda S, y una maestra situada en Colorado Spring. Esta última se encarga de recoger la información del resto de estaciones monitoras repartidas por el mundo: Ascensión (Atlántico sur), Hawai (Pacífico oriental), Kwalalein (Pacífico occidental) y Diego García (Índico). Las estaciones monitoras reciben en todo momento las señales transmitidas por los satélites visibles y obtienen la información necesaria para calcular con gran precisión las órbitas de los satélites. Una vez transmitidos estos datos a la estación maestra, ésta calcula las efemérides de los satélites y se incluyen en el mensaje de navegación. Adicionalmente, se proporcionan servicios de telemetría y telemando. Por último, el segmento de usuario lo constituyen los equipos receptores situados sobre la Tierra. El equipo de usuario es un dispositivo pasivo, puesto que únicamente recibe la información proveniente de los satélites (efemérides, correcciones, etc.) y la procesa. Sus funciones principales son: sintonizar la señal emitida por los satélites, decodificar el mensaje de navegación, medir los tiempos de retardo, calcular los datos requeridos e interpretar los resultados. Existe una gran oferta de receptores en el mercado, desde los más simples de mano con precios a partir de unos 1.000 pesos, hasta los que se utilizan en grandes barcos y aviones que cuestan cientos de miles de pesos. Los más populares son los de mano, puesto que sus precios son bastante asequibles y permiten gran cantidad de funciones, como almacenar puntos de referencia y crear rutas con ellos sobre las que posteriormente nos guiará el equipo. Los más básicos son los llamados OEM, que únicamente poseen la electrónica necesaria para calcular la posición y no tienen ni pantalla ni botones. En la figura 1 se puede ver el aspecto de un equipo receptor GPS típico.

16
Receptor GPS típico.
Figura 8
Funcionamiento La idea que hay detrás del sistema GPS es la de utilizar satélites en el espacio como puntos de referencia para localizaciones terrestres. Mediante la medición muy precisa de las distancias a tres de estos satélites, lo cual se realiza a partir de las medidas de los retardos que han sufrido las señales provenientes de estos satélites, se puede calcular por triangulación la posición en cualquier lugar de la Tierra. Esto mismo se representa de forma esquemática en la figura 2.
figura 9
Localización de la posición mediante tres satélites.
Si se utiliza un solo satélite y conocemos su posición y la distancia que nos separa del mismo, nuestra posición se encontrará en un área de incertidumbre que es geométricamente una esfera. Si a continuación añadimos otro satélite con sus

17
correspondientes datos de posición y distancia, ahora nuestra posición se encontrará sobre una circunferencia intersección de ambas esferas. Por último, si disponemos de tres satélites nuestra posición se reduce a dos puntos en el espacio, de los cuales uno de ellos se puede rechazar por ser una posibilidad incoherente (ya sea por encontrarse a gran distancia de la superficie de la Tierra o moviéndose a una velocidad imposible). Así pues, 3 satélites son suficientes para determinar nuestra posición. No obstante, existen una serie de factores que afectan a la medida de la distancia: errores en el reloj del satélite, desfase en el reloj del receptor o retardo introducido por la propagación ionosférica. Por estas razones, las distancias calculadas por el receptor GPS incluyen un término de error constante, denominándose pseudodistancias, y se hace necesaria la obtención de una cuarta medida para determinar su posición exacta. Así pues, existe un sistema de 4 ecuaciones que debe resolver el receptor para obtener su posición, así como la corrección que debe aplicar a su reloj para estar perfectamente sincronizado con el reloj atómico de referencia situado en Colorado Springs. El sistema GPS fue concebido inicialmente como un proyecto militar que permitiese a soldados y vehículos conocer su posición exacta, por lo que las autoridades estadounidenses decidieron que el sistema estuviera disponible para usos civiles bajo ciertas restricciones. En especial, se introdujo intencionadamente una señal que alterara la precisión con la que los receptores calculan su posición. Este factor de error se conoce con el nombre de disponibilidad selectiva, es aleatoria y varía constantemente, normalmente cuando existe algún conflicto en que se ve involucrado el ejército de los EE.UU. Este hecho da lugar a la existencia de dos tipos de servicios: estándar (SPS) y preciso (PPS). El servicio de posicionamiento estándar permite una precisión horizontal de 100 m y vertical de 156 m, así como una precisión temporal de 340 ns. Por el contrario, el servicio preciso está reservado para usuarios autorizados y permite precisiones de 22 m horizontalmente, 27,7 m en vertical, y una precisión temporal de 100 ns. Para la transmisión, cada satélite emplea dos frecuencias coherentes entre sí: L1 a 1575,42 MHz y L2 a 1227,6 MHz, ambas múltiplos del oscilador de referencia a 10,23 MHz. Posteriormente, estas portadoras se modulan con códigos pseudoaleatorios empleando la técnica de espectro ensanchado. El código C/A (Coarse Acquisition) modula la portadora L1, la cual transporta el mensaje de navegación y es la base del servicio SPS. Este código consiste en una secuencia pseudoaleatoria de 1,023 MHz que se repite cada 1023 bits. Se ha escogido de una familia de códigos ortogonales conocida con el nombre de códigos de Gray, y cada satélite tiene uno distinto que le sirve de identificativo. Por su parte, el código P (Precise) modula tanto la portadora L1 como L2, siendo la base del servicio PPS. Este código posee una frecuencia de 10,23 MHz y un período de 248 - 1 bits (muy largo), lo cual proporciona una duración de 7 días. Todos los satélites tienen el mismo generador de código P, pero a cada uno se le asigna uno de los 40 segmentos incorrelados de 7 días de duración. De este modo, los satélites no se interfieren entre sí y pueden ser identificados. En realidad, el acceso a la segunda portadora está prohibido, ya que la disponibilidad selectiva se implementa por medio de los errores introducidos por la refracción de la ionosfera y la troposfera, y se ha demostrado que se puede estimar su efecto utilizando dos frecuencias distintas. De esta manera, las aplicaciones autorizadas poseen mayor resolución a
18
raíz de la mayor frecuencia del código P y a la disponibilidad de dos frecuencias para poder corregir los errores de propagación atmosférica. La información a transmitir dura 12,5 minutos y se transmite a una velocidad de 50 bit/s, aunque se ensancha en frecuencia por medio de los códigos pseudoaleatorios. De este modo, los 50 bit/s de datos ocupan un ancho de banda de 1 MHz con el código C/A y de 10 MHz con el código P. El código C/A tiene como misión facilitar el enganche al código P para los usuarios autorizados. Como es tan breve (1 ms), es relativamente sencillo obtener la fase del código transmitido por un determinado satélite desplazando el código generado en el receptor hasta que la correlación con la señal recibida sea máxima. Una vez que se ha enganchado el receptor, entonces puede acceder a la información modulada a 50 bit/s. En esa información se encuentra la palabra HOW que indica el estado del código P, de tal forma que se pueda realizar un ajuste más fino a partir de un lugar cercano al que realmente tiene.
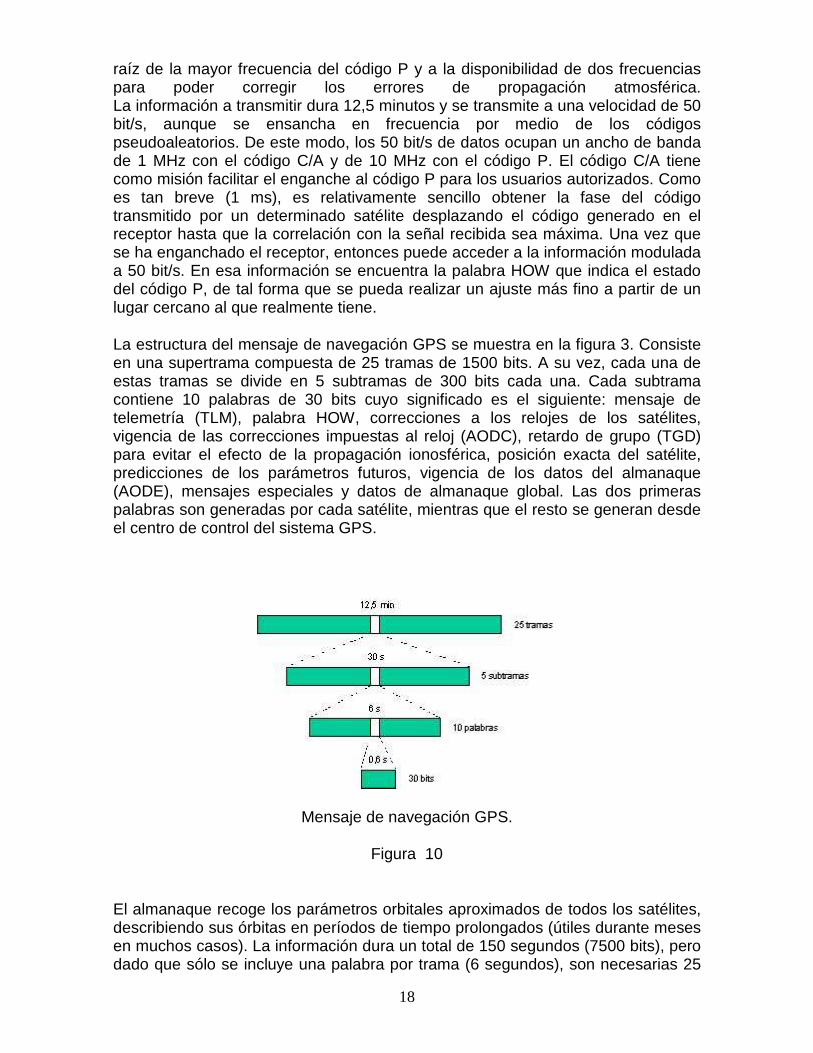
La estructura del mensaje de navegación GPS se muestra en la figura 3. Consiste en una supertrama compuesta de 25 tramas de 1500 bits. A su vez, cada una de estas tramas se divide en 5 subtramas de 300 bits cada una. Cada subtrama contiene 10 palabras de 30 bits cuyo significado es el siguiente: mensaje de telemetría (TLM), palabra HOW, correcciones a los relojes de los satélites, vigencia de las correcciones impuestas al reloj (AODC), retardo de grupo (TGD) para evitar el efecto de la propagación ionosférica, posición exacta del satélite, predicciones de los parámetros futuros, vigencia de los datos del almanaque (AODE), mensajes especiales y datos de almanaque global. Las dos primeras palabras son generadas por cada satélite, mientras que el resto se generan desde el centro de control del sistema GPS.
Mensaje de navegación GPS.
Figura 10
El almanaque recoge los parámetros orbitales aproximados de todos los satélites, describiendo sus órbitas en períodos de tiempo prolongados (útiles durante meses en muchos casos). La información dura un total de 150 segundos (7500 bits), pero dado que sólo se incluye una palabra por trama (6 segundos), son necesarias 25
19
tramas para transmitir el almanaque completo. Así pues, un receptor necesita de 12,5 minutos para obtener el almanaque, aunque dado que su validez se estima en unos 6 meses, su utilidad no es importante si se usa el equipo habitualmente. GPS diferencial
Las técnicas de GPS diferencial (DGPS) se utilizan para eliminar los errores introducidos por la disponibilidad selectiva y otras fuentes de error. El DGPS supone la cooperación de dos receptores, uno que es fijo (estación base) y otro que se desplaza alrededor realizando medidas de posición. El receptor fijo es la clave y se encarga de relacionar todas las medidas del satélite con una referencia fija. De este modo, la estación base calcula las correcciones necesarias para que las pseudodistancias coincidan con su posición correcta que es perfectamente conocida. Las correcciones pueden utilizarse en equipos convencionales que operen en un área próxima (unas decenas de kilómetros), y pueden obtenerse precisiones de hasta un par de metros en aplicaciones móviles o incluso mejores en situaciones estacionarias.
Afortunadamente, la gran escala de los sistemas GPS nos ayuda. Los satélites se encuentran tan alejados en el espacio que las pequeñas distancias que viajamos aquí en la Tierra son insignificantes. Por ello, si dos receptores se encuentran muy juntos el uno del otro (unos pocos cientos de kilómetros), la señal que alcanza a ambos habrá recorrido prácticamente el mismo pasillo a través de la atmósfera y sufrirá los mismos errores.
La idea que hay detrás del DGPS consiste en que disponemos de un receptor que mide los errores de temporización y proporciona la información de corrección a los otros receptores que se están moviendo a su alrededor. En los primeros días del GPS, las estaciones de referencia eran establecidas por compañías privadas que tenían grandes proyectos que demandaban una alta precisión. Pero en la actualidad, existen suficientes agencias públicas transmitiendo correcciones hasta el punto de poder conseguirse gratuitamente. Los guardacostas de EE.UU. y otras agencias internacionales están estableciendo estaciones de referencia por todos los sitios, especialmente cerca de los puertos concurridos y de las rutas marítimas. Cualquiera de la zona puede recibir estas correcciones y mejorar considerablemente la precisión de las medidas de su receptor GPS. En la figura 4 se representa de forma esquemática cuál sería la configuración típica del sistema DGPS.

20
Sistema DGPS.
Figura 11
Sin embargo, no todas las aplicaciones DGPS necesitan un enlace radio, puesto que pueden no requerir un posicionamiento preciso inmediato. Supóngase que se desea grabar la ruta de una nueva carretera para incluirla en un mapa. En este caso, sería suficiente con que el receptor itinerante almacenara las posiciones medidas y el tiempo exacto en que se realizó cada medida. Posteriormente, estos datos pueden unirse con las correcciones almacenadas por el receptor de referencia para la depuración de los datos. Luego el enlace de radio será necesario sólo en aquellas aplicaciones de precisión que se realicen en tiempo real.
21
Aplicaciones Además de todas las aplicaciones militares para las que el sistema fue inicialmente concebido, GPS tiene una gran variedad de aplicaciones civiles en tierra, mar y aire. Básicamente, GPS se utiliza en cualquier lugar salvo en aquellos en los cuales es imposible recibir la señal de los satélites, tales como en el interior de la mayoría de edificios, cuevas y otros lugares subterráneos, o regiones bajo el nivel del agua.
Entre las aplicaciones militares se incluyen, por ejemplo, direccionamiento de misiles autónomos o localización y control de tropas en operaciones militares remotas. La mayoría de las aplicaciones aéreas incluyen la navegación. No obstante, el GPS sirve de ayuda en determinados sistemas ILS para asistir a los aviones en los aterrizajes. ILS es el llamado sistema de aterrizaje por instrumentos, que consiste en un conjunto de estaciones transmisoras de radio situadas en las proximidades del aeropuerto y que se emplean para guiar a la aeronave hacia la pista de aterrizaje, especialmente en condiciones de visibilidad limitada. En el mar, GPS también se utiliza para la navegación de los yates o barcos de pesca. Por último, las aplicaciones terrestres son más diversas, como por ejemplo geodesia, investigación climática o medida de la dinámica tectónica del planeta. Adicionalmente, GPS puede utilizarse en gran número de deportes de ocio, como por ejemplo caza, esquí, mountain-bike, y en general en cualquier situación en que se requiera conocer nuestra posición, ruta, dirección de movimiento o incluso velocidad. En un futuro cercano, gran parte de los vehículos llevarán instalado GPS. Algunos modelos de automóviles ya llevan instalado un pequeño ordenador de a bordo que muestra mapas que pueden ser utilizados para determinar nuestra ruta. Por último, dada la precisión de los relojes de los satélites, éstos pueden utilizarse en algunas aplicaciones científicas. Recordemos que la información de tiempo es crítica para determinar nuestra posición a partir del retardo sufrido por la señal. Por ello, durante experimentos de recogida de datos científicos, a cada muestra de datos puede añadírsele una marca de tiempo sin más que sincronizar nuestro receptor GPS con los relojes atómicos de los satélites. Como curiosidad, se han producido dos fechas importantes para los usuarios GPS. La primera de ellas fue el 22 de agosto de 1999, mientras que la segunda fue el pasado 1 de enero de 2000 (Y2K). El llamado efecto EOW (End-of-Week) Rollover ocurre cada 1024 semanas, una vez cada 20 años. El sistema GPS calcula el tiempo, en parte, contando el número de semanas transcurridas desde el 6 de enero de 1980 hasta un máximo de 1023. La medianoche entre el 21 y 22 de agosto de 1999, el contador de semanas volvió a cero. De acuerdo con el departamento de defensa de los EU., esto no es un problema para los satélites o el centro de control del sistema. Sin embargo, algunos receptores GPS pudieron verse afectados por errores de posicionamiento. La mayoría estaban preparados, ya que los fabricantes lo habían tenido en cuenta, y en algunos casos se limitaba a una reinicialización del equipo. En cuanto al efecto Y2K, es exactamente igual al que ocurrió con multitud de programas informáticos y de dispositivos electrónicos y se limitó a la interpretación que realiza el equipo de una fecha de dos dígitos, es decir, "00" corresponde al año 1900 o al año 2000.

22
Fabricación de una antena helicoidal de 2.425GHz para dispositivos inalámbricos
en la banda ISM
Introducción:
Esta antena helicoidal que describimos puede ser utilizada con cualquier equipo de la banda de los 2.4 GHz, tales como las nuevas tarjetas inalámbricas del tipo 802.11, o como los emisores de vídeo Los criterios principales son que fuera fácil de construir, duradera y de bajo coste. La durabilidad es importante, ya que el viento, los pájaros que se posan sobre las antenas provocan una importante disminución de la señal.
La antena se deriva de la información del libro de antenas Helicoidales "ARRL Antenna Book".
Piezas necesarias:
Para construir una antena es necesario:
• 1 pieza de 0.60 metros de tubo de PVC de 40 mm del que se utiliza en desagües (NT. en el original se habla de que tenga 40mm de diámetro en el interior y unos 42- 43 mm en el exterior y yo sólo he encontrado el que normalmente se utiliza en fontanería que es de 40mm exteriores).
• 1 tapa de 40mm de PVC. (tapón para el tubo de PVC). • 1 tapa de 150 mm de PVC (o una pieza de plástico grueso o madera de
similares dimensiones). • 8 tuercas y 8 arandelas más para las abrazaderas anteriores. • 0.7 mm de grosor de tamaño suficiente como para cortar un círculo de 130
mm de diámetro o una pieza apropiada de aluminio o similar de una lata. Las hojas de aluminio planas comunes no sirven ya que son demasiado finas y se estropean cuando las taladras o cortas.
• 1 hoja de metal de 0.4mm. • Varios metros de cable de cobre esmaltado de 1 mm de diámetro (puede
ser mayor diámetro pero no menor). • Un conector tipo N de montaje en panel (resulta apropiado el que tiene una
base cuadrada con cuatro agujeros para sujetarlo con tornillos). • 3 tornillos, tuercas y arandelas para sujetar el conector tipo N. • 1 tornillo, 1 tuerca y arandelas, para unir el tapón grande la chapa circular y
el tapón pequeño. • pegamento de PVC normal, silicón -sellador de silicona. • Cinta adhesiva.
23
Herramientas requeridas:
• Sierra para metales • Lija del numero 5 para madera. • Una escuadra de carpintero para medir ángulos rectos (te puede servir
cualquier otro utensilio que tenga 90º, esto lo vas a utilizar para dejar lo mas nivelado posible el corte del tubo.
• Cortador de cables fuerte. • Llaves apropiadas para las tuercas utilizadas. • Un destornillador para los tornillos del conector tipo N. • Un taladro • Un juego de brocas para hacer agujeros desde pequeños a realmente
grandes. • Tijeras • Cutter.
Los tapones para PVC de 40 milímetros tienen que tener la base completamente plana (los hay de base plana y otros con base abombada). Hay también algún tipo de estos tapones que en el centro, por la parte interior, tienen partes de plástico que pueden molestar a la hora de poner una tuerca.
Construcción:
Imprime y recorta las plantillas que hay en el fichero de plantillas circle.pdf y rhspiral.pdf o lhspiral.pdf. Deberás utilizar la plantilla de rhspiral para antenas con espiral hacia la derecha y lhspiral para antenas con espiral hacia la izquierda. Necesitarás la plantilla circular para hacer el plano de tierra (reflector), a no ser que puedas trazar un buen círculo de 130 mm de diámetro con una regla o un compás.
Actualización: descarga HelixCalc de la sección de teoría para poder diseñar sus propias plantillas
Procedimiento para hacer una plantilla:
· Para la plantilla del tubo, se imprime una, mida el perímetro del tubo y en un simple folio hace un rectángulo el lado mas corto del rectángulo es la medida del perímetro del tubo y el lado mas grande el tamaño del lateral grande el folio. (Para que entren todas las espiras posibles en cada folio).
Recorte la plantilla impresa, colóquela encima del rectángulo que se ha dibujado en el folio y la primera diagonal de la plantilla impresa se continúa hasta el lateral del rectángulo. Ahora solo falta utilizar escuadra y papel carbón traza una línea paralela al lateral más pequeño del rectángulo, que tiene que cortar justo donde corta la diagonal y el lateral grande del rectángulo. La distancia que hay entre el corte de la diagonal con el lateral mas corto superior es la distancia que se tiene que emplear entre espira y espira, ahora trazar paralelas a lo largo del
24
rectángulo con esa distancia, y luego unir con diagonales una paralela con otra.
Como esta plantilla tendrás que utilizar 2 o 3 plantillas.
· Para la plantilla del círculo sacar la escala así 150(diámetro del tapón grande)/130 (diámetro del círculo de la plantilla) =diámetro de tu tapón/x es decir:
150/130=d/x d= diámetro de tu tampón
Despeja x, el diámetro del círculo a dibujar.
Divide entre 2 el resultado y se dibuja un círculo con un compás con el radio.
Cortar el tubo de 40mm de PVC con una longitud de 550mm (55cm). Para sacar la medida justa del tubo:
Numero de espiras que quieres que tenga * la distancia entre espira y espira (la has sacado antes al dibujar las paralelas, distancia entre paralela y paralela) + la altura del tapón sin contar el grosor del tampón. (La altura del tapón la puedes hallar tomando el tubo, lo introduces en el tapón y marcas en el tubo con un lápiz hasta donde llega el tapón sacas el tapón y mides desde la marca hasta el lateral del tubo, pues esa es la medida que tienes que sumar ;)
Ejemplo: 11(espiras) * 5cm (distancia) + 3,7cm (altura tapón)=58,7cm
Pues 58,7 cm. es el tamaño al que tiene que tener el tubo, con la escuadra compruebas de donde se tiene que rebajar un poco, hasta dejarlo los mas nivelado posible, para rebajarlo usa la lija y déjalo nivelado y con la medida justa del tamaño del tubo.
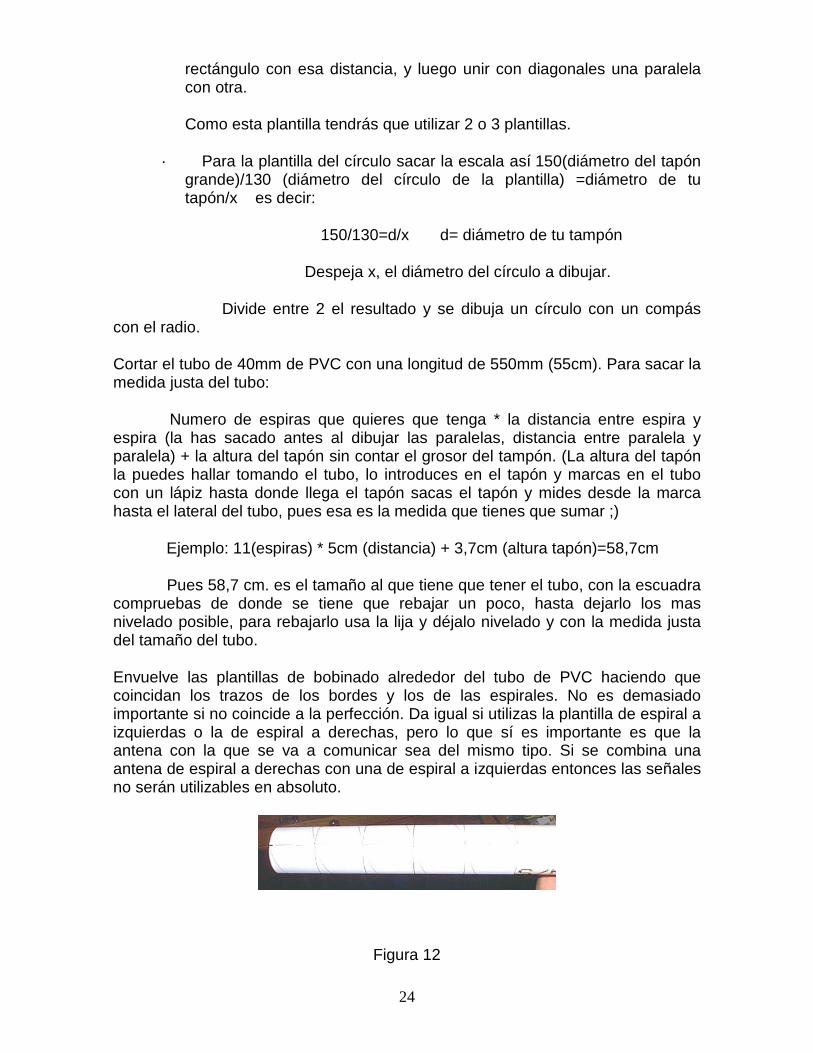
Envuelve las plantillas de bobinado alrededor del tubo de PVC haciendo que coincidan los trazos de los bordes y los de las espirales. No es demasiado importante si no coincide a la perfección. Da igual si utilizas la plantilla de espiral a izquierdas o la de espiral a derechas, pero lo que sí es importante es que la antena con la que se va a comunicar sea del mismo tipo. Si se combina una antena de espiral a derechas con una de espiral a izquierdas entonces las señales no serán utilizables en absoluto.
Figura 12

25
El extremo en el que se empieza con la plantilla será el que conectará a la base...
Figura 13
Utilizando un pico afilado, perforar la plantilla a lo largo de la línea espiral a unos intervalos regulares, digamos 5 o 6 por vuelta. Esto dejará unas marcas en el PVC que después seguiremos para enrollar el cable alrededor. Desplazar la plantilla y repetir el paso anterior hasta que tenga una espiral completa alrededor de toda la longitud del tubo. Hacer otra marca en el punto final de la espiral de la plantilla. Ahora deberían quedar libres unos cuantos milímetros de tubo. Esto es correcto.
Tomar el alambre de 1mm y, utilizando pegamento o silicón, sujeta el final del cable en donde la espiral acaba en el tubo (el punto final descrito en el apartado anterior). Enrolla lentamente el alambre alrededor del tubo, siguiendo las marcas de la espiral. Dos o tres veces en cada vuelta deberá poner más pegamento para sujetar el alambre en su lugar.
Cuándo se acerque a la base no pegue nada en la última vuelta, cortar el alambre dejando que sobren unos 10 o 15 cm. mas de lo necesarios. Recorta de la lámina de metal el círculo de que se ha creado antes.
Hacer agujeros con el taladro en la tapa de 150 mm de PVC y en el círculo de 130mm de chapa. Se debe hacer un agujero para el tornillo central.
Normalmente los tapones llevan marcado el centro, por lo cual solo se tiene que hacer el agujero con la broca apropiada que tiene que ser del tamaño del tornillo a emplear.
Para hacer los agujeros del conector N al tapón grande se hace una plantilla en papel del tapón pequeño, la recorte y cogí el conector N sobre la plantilla y marqué estas posiciones de los agujeros, (calcule dejar sitio para poder colocar las tuercas de los tornillos para sujetarlo) marque una línea en la plantilla para ver por donde tenía que cortar el tapón pequeño para dejar espacio para los agujeros en el conector grande. Mirar en la foto.

26
Cuando atornilles las dos piezas juntas debería parecerse a esto... (Falta colocar el círculo de chapa del reflector y el conector tipo N).
A continuación deberás hacer los taladros para poner las dos abrazaderas tipo U, dependiendo del tamaño que utilices. Tendrás que tener cuidado de que la posición de las abrazaderas sea correcta, de manera que el mástil que ha de sujetarse a ellas no moleste posteriormente a la hora de conectar el cable al conector tipo N.
Una vez hecho todos los agujeros en el tapón grande coloca la chapa redonda por la parte exterior del tapón haciendo que coincidan los agujeros centrales y con el taladro haz los agujeros en la chapa a través de los que tienes en el tapón grande, después quita la chapa y al agujero central del conector N hazle un agujero mas grande la razón es para que no llegue a tocar en ningún momento la chapa con la parte del conector este contacto lo tiene que hacer con los agujeros de soporte del conector (es la masa del conector).
Coloca la hoja circular de metal en la tapa grande de y atornilla el tapón de 40 mm, asegurándote que todos los agujeros de la hoja de aluminio y del tapón coincidan perfectamente. ( como vamos a dejar fija ya la hoja circular primero haz la prueba de que coinciden los agujeros, luego échale unas gotas de pegamento a la hoja circular y déjala ya fija sobre el tapón grande pegándola en la parte interior del tapón.
Necesita que sea de una longitud tal que te permita seguir el trazo espiral alrededor del tubo hasta el final.
Introduce el tubo en el tapón de 40mm y haz una marca en donde la espiral se encuentra con la parte final del tapón. Corta el cable en este punto dejando unos milímetros de más. Con el cutter rasca el esmalte del final del cable para dejarlo brillante y preparado para soldar con facilidad.
Con cuidado, suelda el final del pico estrecho de la tira de cobre al cable, de modo que la otra esquina de la a la chapa se pueda soldar elegantemente sobre el terminal del conector tipo N. (La chapa va entre el tubo y el tapón) Así que haz los ajustes correspondientes para que desde la soldadura del cable hasta el conector N(al que soldaras la chapa luego) quede la chapa perfectamente con el tubo puesto en el tapón , cuando veas que está, pega la chapa en el tubo con superglue, para que no se te mueva al pegar el tubo con el pegamento de PVC al tapón
Esta chapa en triángulo, actúa como transformador de impedancias. No sé realmente cómo funciona, pero lo he hecho cuatro veces con pequeñas diferencias de longitud, y según el analizador de dos puertos funciona correctamente.

27
Saca el tubo y raya la parte interior del tapón de 40mm y las zonas correspondientes del tubo de 40mm de manera que el pegamento sujete mejor. Antes de pegar limpia completamente todas las superficies.
Figura 14
Detalles importantes:
El tubo de PVC utilizado no se calienta si se introduce en un microondas funcionando durante unos pocos minutos, de modo que no absorbe ninguna de las ondas. Comprueba que esto sea así en el tubo o material que vayas a utilizar metiendo una parte en el microondas (con un pequeño vaso de agua) y asegúrate de que no se calienta o quema. Si fuera así no sería un buen material para hacer la antena.
El ajuste de impedancias descrito con la tira de cobre/latón me funcionó de varias maneras. La verdad, me quedé impresionado cuando el analizador de puertos me indicó lo bien que el circuito de ajuste estaba funcionando.
Hasta que no haga más pruebas, no diré que con esta antena se pueden conseguir 10Kms de cobertura (aunque es bastante posible y esa es la distancia que se pretende). Deberían funcionar bien a unos 3-4Km con buena visibilidad (sin demasiadas obstrucciones como árboles o tejados)
.
Teoría
El diseño de esta antena se deduce del estupendo libro ARRL Antenna Handbook. En el capítulo 19 hay una serie de diseños de antenas helicoidales y cálculos matemáticos que detallan como calcular y calibrar un diseño de una antena.

28
Figura 15
Cl tiene que estar entre 0.75L-1.133L y es el perímetro del arrollamiento Sl tiene que estar entre 0.2126Cl y 0.2867Cl y es la longitud axial de una vuelta G tiene que estar entre 0.8L y 1.1L y es el diámetro del plano de tierra o reflector Cl = pi * D es el perímetro de arrollamiento, y viene fijado por el tubo de PVC que pensemos utilizar como base para la antena. (Longitud = Diámetro * pi).
La frecuencia central (2.425GHz) tiene una longitud de onda L = 0.123711 metros.
Cl = pi * 0.040m = 0.12566 m (12.56 cm) = 1.0576 veces L Sl = 0.2126 * 0.12566 = 0.02671 (o sea 26.7 milímetros, 2.67 cm)
La ganancia de la antena dada en dBi viene definida como...
Ganancia = 11.8 + 10log10 (Cl * Cl * n * Sl) donde n es el número de espiras. Ganancia = 11.8 + 10log10 (1.0576 * 1.0576 * 22 * 0.2126) = 18.9 dB
La tabla siguiente muestra la relación entre número de espiras y ganancia. Como puede verse, para ganar 3 dBs más, es necesario doblar casi el número de espiras y por lo tanto la longitud de la antena.

29
Figura 16
Algunas de las nuevas tarjetas 802.11 te permiten seleccionar la frecuencia central (canal) en la que emitirán. Es posible que basándote en esto quizás quieras calcular la antena nuevamente para que se acomode lo más posible a tu instalación.
HelixCalc
Existe una pequeña utilidad para diseñar e imprimir las plantillas que pueda ser útil, de modo que no estarás obligado a utilizar las que yo generé. Se puede cambiar varios de los parámetros (como se describe arriba), y después imprimir una plantilla para el cableado y otra para el plano de tierra. Puedes trabajar tanto en pulgadas como en centímetros. Desgraciadamente existe un pequeño error: la longitud total de la antena genera un resultado equivocado. Puedes calcular la longitud total de la antena manualmente multiplicanda el número de espiras por la longitud de una sola espira Slamda, que se muestra en una caja en el programa. He perdido la fuente del programa y quizás algún día lo vuelva a codificar. Sin embargo, la plantilla de bobinado que se imprime sí es correcta. HelixCalc
Rendimiento
El diagrama de arriba es la medida SWR (Standing Wave Ratio, Cociente de Onda Estacionaria) y el de abajo es la medida “Log return". Ambas antenas están muy bien, y cumplen las reglamentaciones del espectro radioeléctrico (SWR de 1:1.15 o mejor). Parece ser que el de la tira de cobre/latón para ajustar las impedancias funciona extremadamente bien.

30
Antena #1
figura 17

31
Antena #2
Figura 18

32
Patrones de radiación
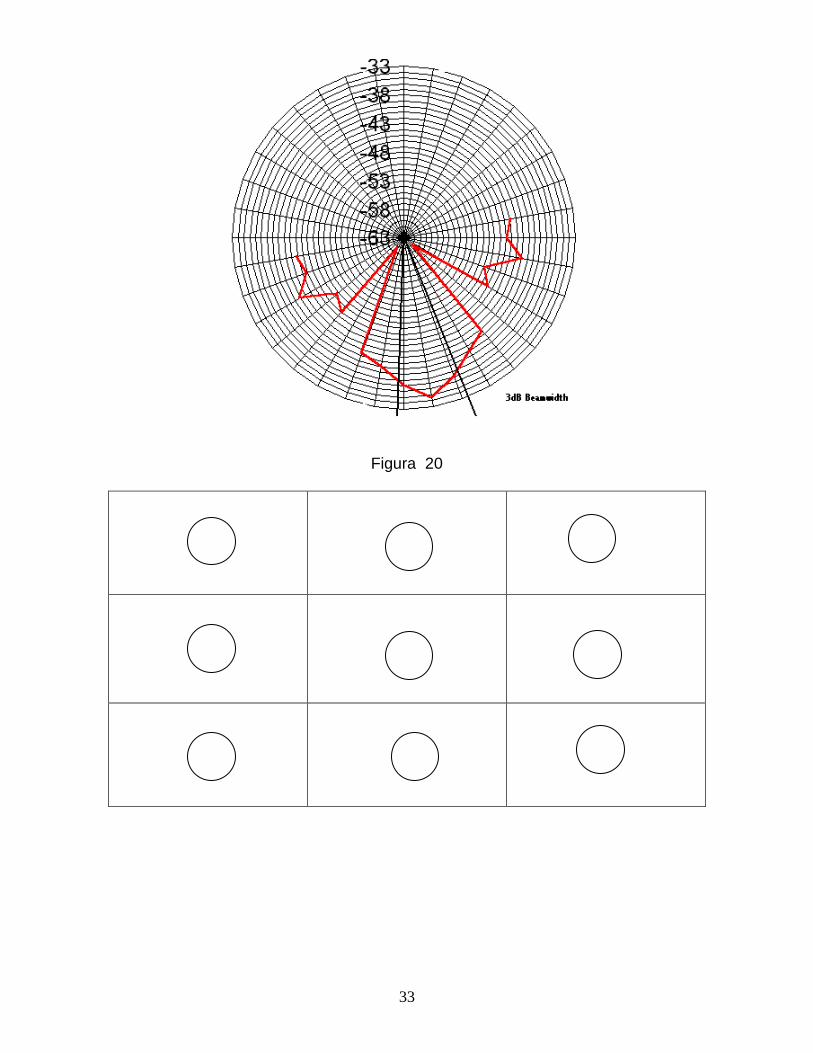
A continuación tienes las medidas de algunos patrones de radiación. Desafortunadamente, debido a mi instalación, sólo pude hacer medidas a 180 grados en la parte delantera. El primer patrón se hizo tomando medidas con intervalos de 5 hasta 40 grados, y después dibujando la gráfica reflejada para tener el patrón completo. Los puntos de -3Db se marcaron de acuerdo con la teoría de que el lóbulo tiene aproximadamente 40 grados de ancho. Los segundos patrones se hicieron utilizando intervalos de 10 hasta 90 grados. En ellos se muestra claramente el primer nulo a unos 40 grados del eje de la antena. La relación delante-detrás se midió en 20 dB.
Half Power Beam Width = 52 / (C? * sqrt(n * S?)) degrees = 52 / (1.066 * sqrt(13 * 0.31830)) = 23.98 degrees
Figura 19
33
Figura 20

34
PARÁMETROS DEL ARREGLO DE 9 ANTENAS HELICOIDALES
F=2.4 gHz. C= λ= c/f =3x1010 /2.4x109 = 12.5cm d=λ / ¶ =3.98cm Angulo=140 L=C/cos14° =12.81 S=12.81xsen(14°)=18.81x0.22= 2.79cm ; Sλ =0.22 n=81 . Para una antena; n=9, para un arreglo de 9 antenas helicoidales con nueve vueltas. D=12nSλ=12x0.22x81=213.84 Ae=Dλ2/4¶=(2.64x9xλ2)/4x3.14159=1.89λ2-�lado=1.38λ = 1.38x12.5=17.25cm D=4¶Ae/ λ
2=4(3.14159)1.89=23.75 D9=Dx9=23.75x9=213.75=23.3dB
F 2.4GHZ C 12.5cm d 3.98cm α 14° L 12.81cm S 2.79 n 81; 9x9; D 213.84 Ae 1.89λ2 D 23.75 D9 213.75=23.3dB lado 17.25cm

35
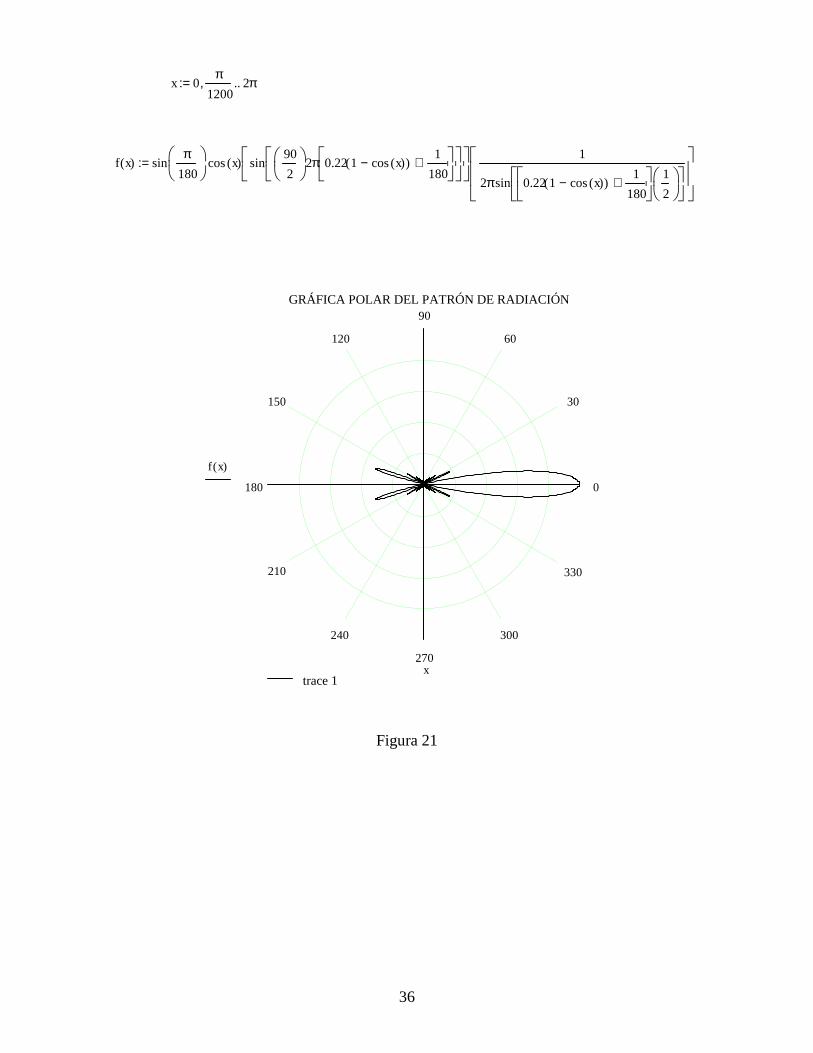
GRÁFICA DEL PATRÓN DE RADIACIÓN DE UNA ANTENA HELICOIDAL.
MODO AXIAL
( )
+−
=
=
N
S
N
NE
2
1cos12
2sin
2sin
cos2
sin
θλ
πψ
ψ
ψθπ
36
x 0π
1200, 2π..:=
f x( ) sinπ
180
cos x( ) sin90
2
2π 0.22 1 cos x( )−( )
1
180+
1
2π sin 0.22 1 cos x( )−( )1
180+
1
2
:=
0
30
60
90
120
150
180
210
240
270
300
330
trace 1
GRÁFICA POLAR DEL PATRÓN DE RADIACIÓN
f x( )
x
Figura 21

37
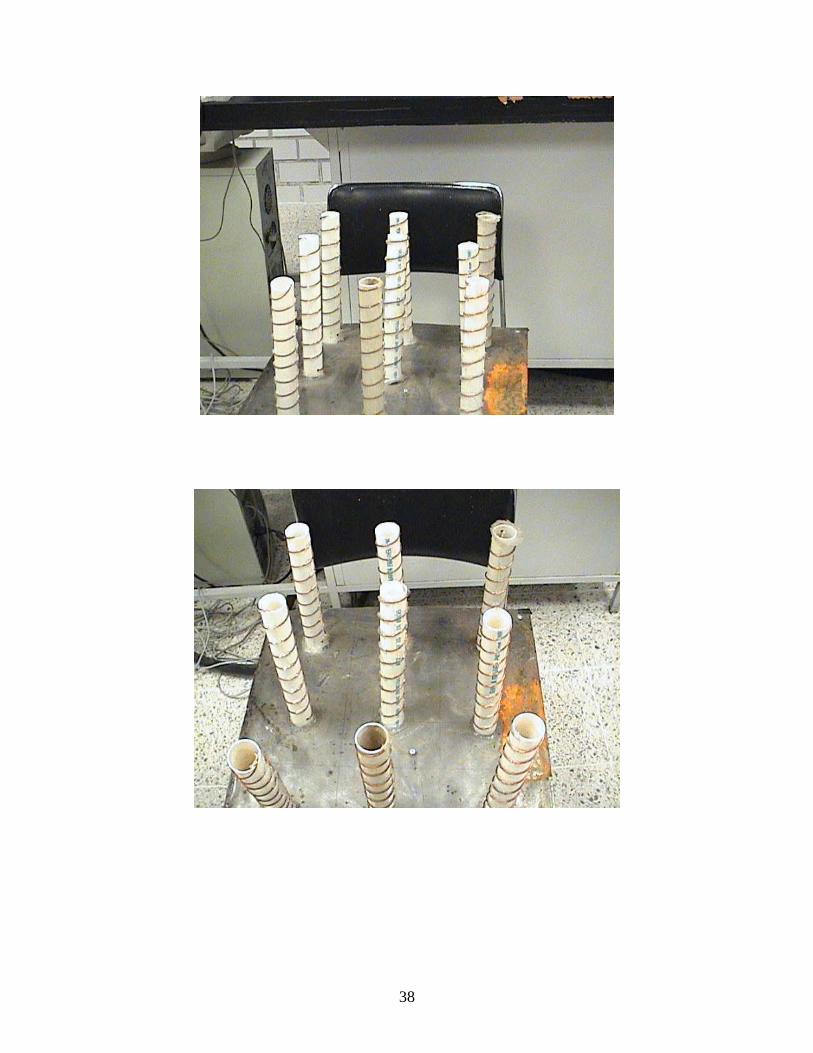
ARREGLO DE 9 ANTENAS HELICOIDALES VISTO DESDE EL FRENTE
d=3.98 cm
1.38λ 17.25 cm
4.14λ 51.75 cm
38

39
40
BIBLIOGRAFÍA
ANTENNAS Kraus, John Mc. Grawn-Hill 3a edición . ANTENNA THEORY AND DESIGN WL Stutzmann. Wiley. Ed. Prentice-Hall GUÌA DE ANTENAS Rugen, T. Ed. Limusa http://www.portalgsm.com/documentacion_extendida/99_0_17_0_C/ http://jcoppens.com/ant/helix/calc.php
http://www.wireless.org.au/~jhecker/helix/ http://www.tel.uva.es/personales/jpozdom/telecomunicaciones/tutorial/apartado51.html http://www.canalsocial.net/GER/ficha_GER.asp?id=9836&cat=medioinformacion http://www.geocities.com/comunicacionesudg/gps1.htm http://helix.remco.tk http://jcoppens.com/ant/helix/calc.php http://www.vk2zay.net/helical.php