documentgf
DESCRIPTION
fdgfdfdgdgdgdfTRANSCRIPT
Metodos Matematicos IEcuaciones Diferenciales Ordinarias
Gabriel Alvarez
25 de septiembre de 2014

ii

Indice general
1. INTRODUCCION 31.1. Ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. Sistemas de ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3. Reduccion a sistemas de ecuaciones de primer orden . . . . . . . . . . . . . . . . . . . 41.4. Ecuaciones y sistemas autonomos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5. Ecuaciones y sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.6. Soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. ECUACIONES DE PRIMER ORDEN 72.1. Campos de direcciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. Existencia, unicidad y prolongacion de soluciones . . . . . . . . . . . . . . . . . . . . 8
2.2.1. Teorema de existencia y unicidad locales . . . . . . . . . . . . . . . . . . . . . 82.2.2. Prolongacion y existencia de soluciones maximales . . . . . . . . . . . . . . . . 9
2.3. Teorema fundamental del calculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4. Ecuaciones con variables separables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.1. Metodo de separacion de variables . . . . . . . . . . . . . . . . . . . . . . . . . 112.4.2. Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4.3. Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5. Ecuaciones autonomas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5.1. Propiedades elementales de las soluciones . . . . . . . . . . . . . . . . . . . . . 142.5.2. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5.3. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6. Ecuacion lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.6.1. Ecuacion lineal homogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.6.2. Metodo de variacion de constantes . . . . . . . . . . . . . . . . . . . . . . . . 182.6.3. Formula de Leibniz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.7. Formas diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.8. Ecuaciones exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.9. Factores integrantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.9.1. Factores integrantes locales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3. ECUACIONES LINEALES 253.1. Funciones complejas de variable real . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2. Ecuaciones lineales de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1. Operadores diferenciales lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2.2. Dependencia lineal de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2.3. Soluciones de la ecuacion homogenea . . . . . . . . . . . . . . . . . . . . . . . 283.2.4. Teorema de separacion de Sturm . . . . . . . . . . . . . . . . . . . . . . . . . 29
1
2 INDICE GENERAL
3.2.5. Forma autoadjunta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2.6. Teorema de comparacion de Sturm . . . . . . . . . . . . . . . . . . . . . . . . 303.2.7. Ecuacion de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.2.8. Reduccion del orden de la ecuacion . . . . . . . . . . . . . . . . . . . . . . . . 313.2.9. Soluciones de la ecuacion no homogenea . . . . . . . . . . . . . . . . . . . . . 323.2.10. Formula de variacion de constantes . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3. Ecuaciones con coeficientes constantes . . . . . . . . . . . . . . . . . . . . . . . . . . 343.3.1. Soluciones de la ecuacion homogenea . . . . . . . . . . . . . . . . . . . . . . . 343.3.2. Estabilidad de las soluciones de la ecuacion homogenea real . . . . . . . . . . . 353.3.3. Metodo de coeficientes indeterminados . . . . . . . . . . . . . . . . . . . . . . 36
3.4. Osciladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4.1. Oscilador mecanico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4.2. Oscilador electrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4.3. Oscilador armonico simple: amplitud y fase . . . . . . . . . . . . . . . . . . . . 393.4.4. Oscilador amortiguado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.4.5. Oscilador amortiguado con fuerza externa armonica . . . . . . . . . . . . . . . 423.4.6. Oscilador no amortiguado con fuerza externa periodica . . . . . . . . . . . . . 43
3.5. Ecuaciones lineales de orden superior . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4. SISTEMAS LINEALES 494.1. Notacion matricial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2. Sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.3. Sistemas homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3.1. Matrices fundamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.3.2. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4. Sistemas no homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.5. Formula de variacion de constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.6. Sistemas lineales con coeficientes constantes . . . . . . . . . . . . . . . . . . . . . . . 55
4.6.1. Exponencial de una matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.6.2. Solucion general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.6.3. Calculo de la exponencial de una matriz . . . . . . . . . . . . . . . . . . . . . 56

Capıtulo 1
INTRODUCCION
1.1. Ecuaciones diferenciales
Definicion 1.1 Se llama ecuacion diferencial de primer orden explıcita a una ecuacion de la forma
dx
dt= f(t, x)
o abreviadamente x′ = f(t, x), donde x es funcion de la variable t y f esta definida en una region Ddel plano (t, x).
El termino “explıcita” indica que la derivada x′ esta dada como funcion explıcita de (t, x) en laregion D. La forma general de una ecuacion diferencial de primer orden es F (t, x, x′) = 0, que nonecesariamente determina x′ como funcion unıvoca de (t, x).
Definicion 1.2 Se llama ecuacion diferencial de orden n explıcita a una ecuacion de la forma
dnx
dtn= f(t, x,
dx
dt, . . . ,
dn−1x
dtn−1)
o abreviadamente x(n) = f(t, x, x′, . . . , x(n−1)), donde x es funcion de la variable t y f esta definidaen una region D del espacio (t, x0, x1, . . . , xn−1).
De nuevo el termino “explıcita” indica que el segundo miembro determina la derivada de orden masalto (el orden de la ecuacion) como funcion explıcita de la variable t, de la propia funcion x y de susderivadas x(k) hasta el orden n− 1.
Ejemplo 1.1 Las ecuaciones diferenciales de primer orden
dx
dt= t− 2x y
dx
dt= x2
son explıcitas. Las ecuaciones de primer orden(dx
dt
)2
+ 1 = 0 y
(dx
dt
)2
+ x2 = 0
no son explıcitas.
3

4 CAPITULO 1. INTRODUCCION
1.2. Sistemas de ecuaciones diferenciales
Definicion 1.3 Un sistema de ecuaciones diferenciales de primer orden es un sistema de la forma
dx1
dt= f1(t, x1, . . . , xn)
...
dxndt
= fn(t, x1, . . . , xn)
o abreviadamente x′1 = f1(t, x1, . . . , xn), . . . , x′n = fn(t, x1, . . . , xn), en el que el numero de ecuacioneses igual al numero de funciones x1, . . . , xn de la variable t y las funciones f1, . . . , fn estan definidasen una misma region D del espacio (t, x1, . . . , xn).
En Mecanica Clasica tambien se presentan sistemas de ecuaciones diferenciales de segundo orden dela forma
d2x1
dt2= f1(t, x1, . . . , xn,
dx1
dt, . . . ,
dxndt
)
...
d2xndt2
= fn(t, x1, . . . , xn,dx1
dt, . . . ,
dxndt
).
Definicion 1.4 Se denomina orden de un sistema de ecuaciones diferenciales a la suma de losordenes de las ecuaciones del sistema.
1.3. Reduccion a sistemas de ecuaciones de primer orden
Cualquier ecuacion diferencial o sistema de ecuaciones diferenciales se puede escribir como sistemade ecuaciones diferenciales de primer orden mediante la introduccion de funciones auxiliares.
Ejemplo 1.2 Si en la ecuacionx′′ = f(t, x, x′)
se denota x1 = x y se introduce la funcion auxiliar x2 = x′, la ecuacion es equivalente al sistema
x′1 = x2
x′2 = f(t, x1, x2).
Ejemplo 1.3 Si en el sistema
x′′1 = f1(t, x1, x2, x′1, x′2)
x′′2 = f2(t, x1, x2, x′1, x′2)
se introducen las funciones auxiliares x3 = x′1, x4 = x′2, el sistema de dos ecuaciones de segundoorden es equivalente al sistema de cuatro ecuaciones de primer orden
x′1 = x3
x′2 = x4
x′3 = f1(t, x1, x2, x3, x4)
x′4 = f2(t, x1, x2, x3, x4).

1.4. ECUACIONES Y SISTEMAS AUTONOMOS 5
1.4. Ecuaciones y sistemas autonomos
Definicion 1.5 Una ecuacion diferencial se denomina autonoma si la funcion f no depende de t,es decir, si la ecuacion es de la forma
x(n) = f(x, x′, . . . , x(n−1)).
Un sistema de ecuaciones diferenciales de primer orden se denomina autonomo si las funcionesf1,. . . ,fn no dependen de t, es decir, si el sistema es de la forma
x′1 = f1(x1, . . . , xn)
...
x′n = fn(x1, . . . , xn).
1.5. Ecuaciones y sistemas lineales
Definicion 1.6 Una ecuacion diferencial de orden n se denomina lineal si es de la forma
x(n) + a1(t)x(n−1) + · · ·+ an(t)x = b(t).
Si ademas b(t) ≡ 0, la ecuacion se denomina homogenea.
Ejemplo 1.4 La ecuaciondx
dt= x.
es lineal homogenea. La ecuaciondx
dt= t2.
es lineal no homogenea. La ecuaciondx
dt= x2
no es lineal.
Definicion 1.7 Un sistema de ecuaciones diferenciales de primer orden se denomina lineal si es dela forma
x′1 = a11(t)x1 + · · ·+ a1n(t)xn + b1(t)
...
x′n = an1(t)x1 + · · ·+ ann(t)xn + bn(t).
Si ademas b1(t) = · · · = bn(t) ≡ 0, el sistema se denomina homogeneo.
Los usos del termino lineal para ecuaciones y para sistemas son compatibles, ya que el sistemade ecuaciones diferenciales de primer orden asociado a una ecuacion diferencial lineal (homogenea)mediante el metodo de la seccion 1.3 es un sistema lineal (homogeneo).

6 CAPITULO 1. INTRODUCCION
1.6. Soluciones
Definicion 1.8 Una solucion de la ecuacion diferencial
x′ = f(t, x)
es una funcion u definida en un intervalo I de la recta real tal que
u′(t) = f(t, u(t))
para todo t del intervalo I.
Ejemplo 1.5 La funcion
u1(t) =1
1− t, t < 1
es una solucion de la ecuacion diferencialx′ = x2,
mientras que la funcion
u2(t) =1
1− t, t > 1
es otra solucion distinta de la misma ecuacion diferencial. Sin embargo la funcion
v(t) =1
1− t, t 6= 1
no es una solucion (a pesar de que satisface la ecuacion diferencial) ya que su dominio de definicionno es un intervalo.
Definicion 1.9 Una solucion de la ecuacion diferencial
x(n) = f(t, x, x′, . . . , x(n−1))
es una funcion u definida en un intervalo I de la recta real tal que
u(n)(t) = f(t, u(t), u′(t), . . . , u(n−1)(t))
para todo t del intervalo I.
Definicion 1.10 Una solucion del sistema de ecuaciones diferenciales de primer orden
x′1 = f1(t, x1, . . . , xn)
...
x′n = fn(t, x1, . . . , xn)
es un conjunto de funciones u1, . . . , un definidas en el mismo intervalo I de la recta real y tales que
u′1(t) = f1(t, u1(t), . . . , un(t))
...
u′n(t) = fn(t, u1(t), . . . , un(t))
para todo t del intervalo I.
Capıtulo 2
ECUACIONES DE PRIMER ORDEN
2.1. Campos de direcciones
La ecuacion diferencialx′ = f(t, x)
define un campo de direcciones en la region D del plano (t, x). Esto es, a cada punto (t, x) de laregion D le hace corresponder una pendiente, que se puede representar graficamente mediante unsegmento de la recta que pasa por (t, x) con pendiente f(t, x). Notese que hay una restriccion enestos campos de direcciones: una ecuacion diferencial explıcita no puede representar una direccionvertical.
Una solucion de la ecuacion diferencial es una curva derivable definida en un intervalo y tal quela tangente en cada punto de la curva tiene la pendiente del campo de direcciones en ese punto.
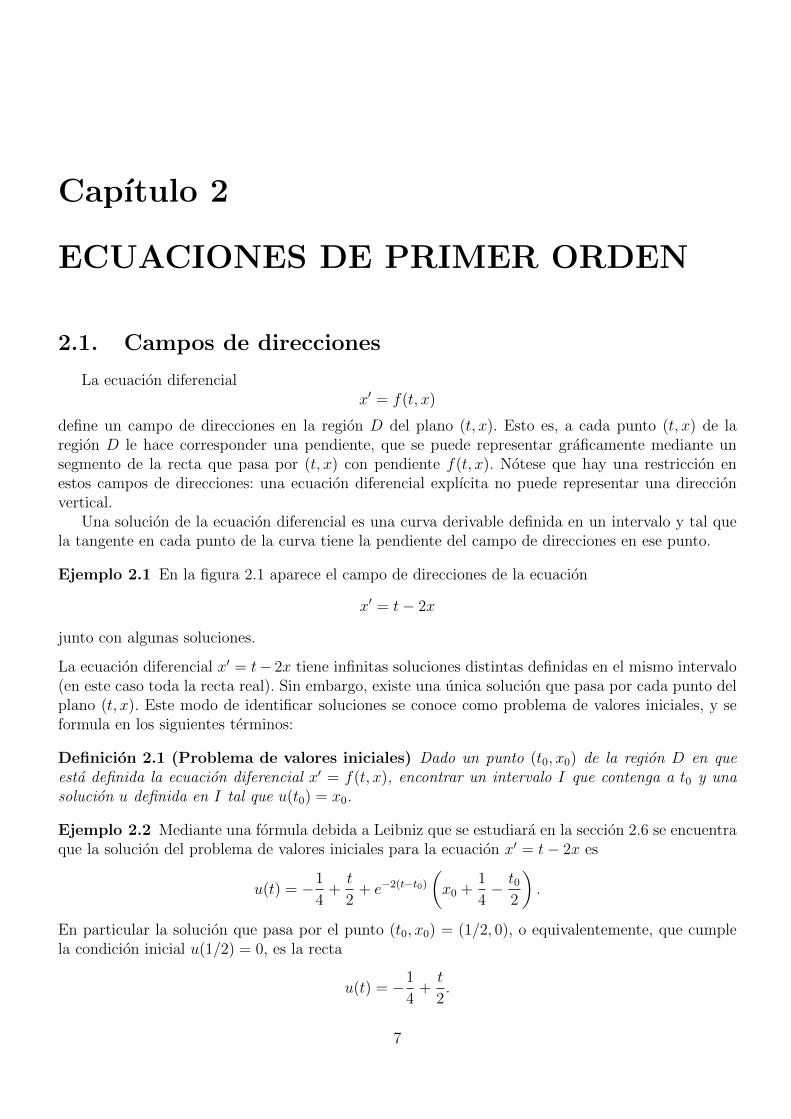
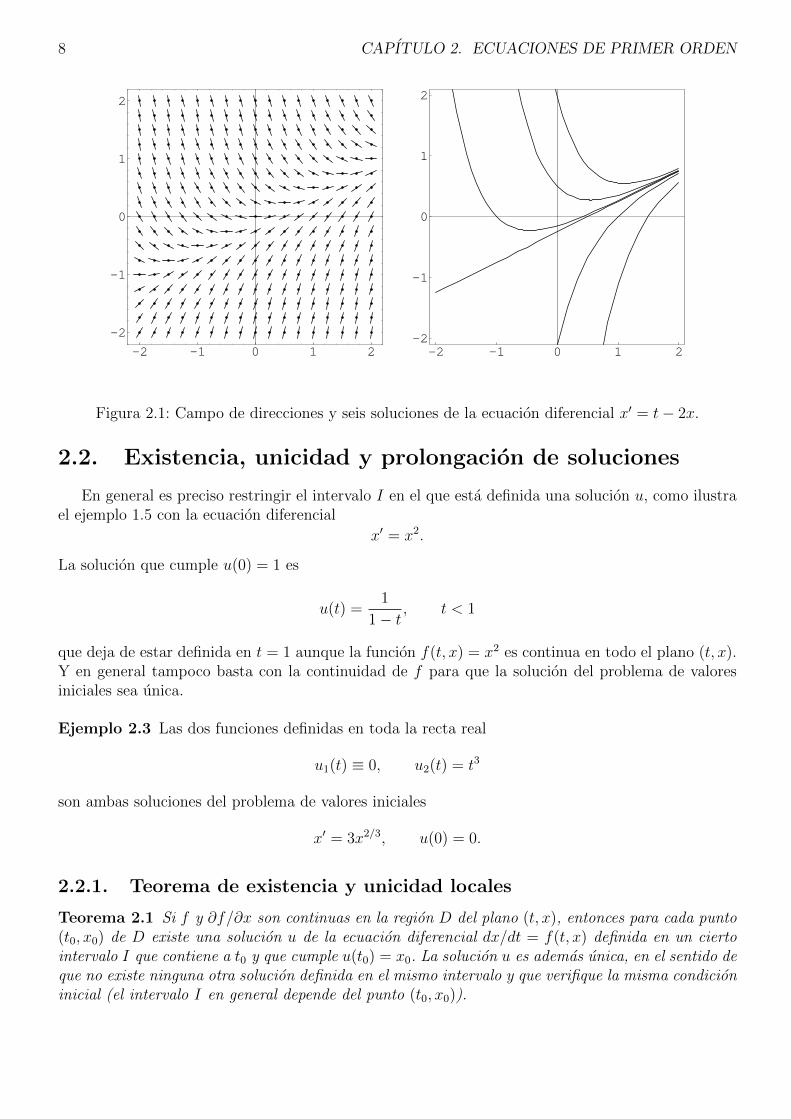
Ejemplo 2.1 En la figura 2.1 aparece el campo de direcciones de la ecuacion
x′ = t− 2x
junto con algunas soluciones.
La ecuacion diferencial x′ = t− 2x tiene infinitas soluciones distintas definidas en el mismo intervalo(en este caso toda la recta real). Sin embargo, existe una unica solucion que pasa por cada punto delplano (t, x). Este modo de identificar soluciones se conoce como problema de valores iniciales, y seformula en los siguientes terminos:
Definicion 2.1 (Problema de valores iniciales) Dado un punto (t0, x0) de la region D en queesta definida la ecuacion diferencial x′ = f(t, x), encontrar un intervalo I que contenga a t0 y unasolucion u definida en I tal que u(t0) = x0.
Ejemplo 2.2 Mediante una formula debida a Leibniz que se estudiara en la seccion 2.6 se encuentraque la solucion del problema de valores iniciales para la ecuacion x′ = t− 2x es
u(t) = −1
4+t
2+ e−2(t−t0)
(x0 +
1
4− t0
2
).
En particular la solucion que pasa por el punto (t0, x0) = (1/2, 0), o equivalentemente, que cumplela condicion inicial u(1/2) = 0, es la recta
u(t) = −1
4+t
2.
7
8 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
Figura 2.1: Campo de direcciones y seis soluciones de la ecuacion diferencial x′ = t− 2x.
2.2. Existencia, unicidad y prolongacion de soluciones
En general es preciso restringir el intervalo I en el que esta definida una solucion u, como ilustrael ejemplo 1.5 con la ecuacion diferencial
x′ = x2.
La solucion que cumple u(0) = 1 es
u(t) =1
1− t, t < 1
que deja de estar definida en t = 1 aunque la funcion f(t, x) = x2 es continua en todo el plano (t, x).Y en general tampoco basta con la continuidad de f para que la solucion del problema de valoresiniciales sea unica.
Ejemplo 2.3 Las dos funciones definidas en toda la recta real
u1(t) ≡ 0, u2(t) = t3
son ambas soluciones del problema de valores iniciales
x′ = 3x2/3, u(0) = 0.
2.2.1. Teorema de existencia y unicidad locales
Teorema 2.1 Si f y ∂f/∂x son continuas en la region D del plano (t, x), entonces para cada punto(t0, x0) de D existe una solucion u de la ecuacion diferencial dx/dt = f(t, x) definida en un ciertointervalo I que contiene a t0 y que cumple u(t0) = x0. La solucion u es ademas unica, en el sentido deque no existe ninguna otra solucion definida en el mismo intervalo y que verifique la misma condicioninicial (el intervalo I en general depende del punto (t0, x0)).

2.2. EXISTENCIA, UNICIDAD Y PROLONGACION DE SOLUCIONES 9
2.2.2. Prolongacion y existencia de soluciones maximales
Definicion 2.2 Sean u y v soluciones de la ecuacion diferencial x′ = f(t, x) definidas en los in-tervalos Iu e Iv respectivamente. Se dice que v es una prolongacion de u si Iu esta estrictamentecontenido en Iv y u(t) = v(t) para todo t en Iu.
Definicion 2.3 Una solucion u de la ecuacion diferencial x′ = f(t, x) se denomina maximal cuandono admite prolongacion.
Ejemplo 2.4 Soluciones no maximales se suelen presentar en la practica al resolver ecuacionesdiferenciales mediante desarrollo en serie de Taylor. Por ejemplo, si se busca la solucion del problemade valores iniciales
dx
dt= x2, u(0) = 1
escribiendo
u(t) =∞∑n=0
u(n)(0)
n!tn,
al derivar reiteradamente la ecuacion se obtiene u(n)(0) = n!, es decir,
u(t) =∞∑n=0
tn, −1 < t < 1.
La solucion maximal correspondiente es v(t) = 1/(1− t), t < 1 que coincide con la suma de la seriede Taylor u(t) en el intervalo −1 < t < 1 en el que esta serie converge.
Teorema 2.2 Si f y ∂f/∂x son continuas en una region D del plano (t, x), entonces para todo(t0, x0) en la region D existe una unica solucion maximal u que verifica u(t0) = x0. El intervalo I enel que esta definida esta solucion maximal es abierto.
Teorema 2.3 Si f y ∂f/∂x son continuas en todo el plano y el intervalo de definicion I de unasolucion maximal u tiene un extremo α, entonces |u(t)| → ∞ cuando t→ α.
Ejemplo 2.5 La ecuacion diferencialdx
dt= x− x3
tiene las soluciones constantes u1(t) ≡ 1, u2(t) ≡ 0 y u3(t) ≡ −1. Los dos teoremas anterioresimplican que cualquier solucion maximal u que cumpla −1 ≤ u(t0) ≤ 1 para algun t0 esta definidapara todo t real.
En adelante y salvo que se indique explıcitamente lo contrario, el termino “solucion” significara“solucion maximal”.
10 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
-2 -1 0 1 2
-2
-1
0
1
2
-2 -1 0 1 2
-2
-1
0
1
2
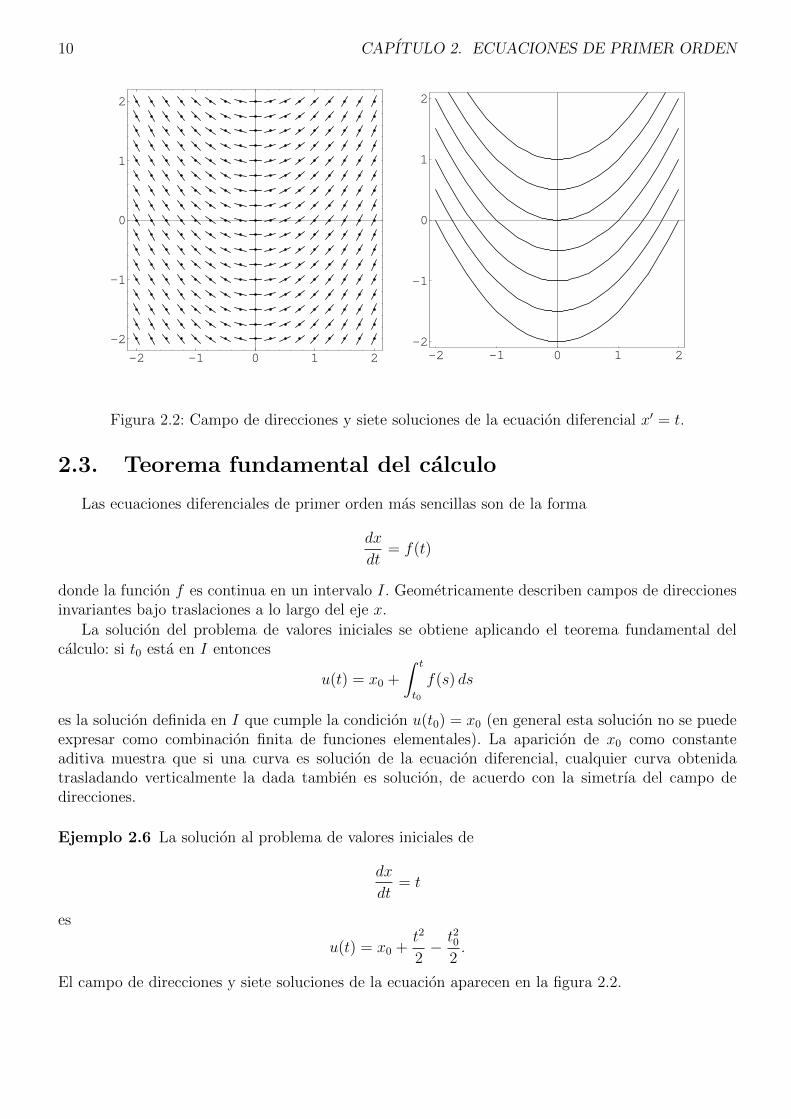
Figura 2.2: Campo de direcciones y siete soluciones de la ecuacion diferencial x′ = t.
2.3. Teorema fundamental del calculo
Las ecuaciones diferenciales de primer orden mas sencillas son de la forma
dx
dt= f(t)
donde la funcion f es continua en un intervalo I. Geometricamente describen campos de direccionesinvariantes bajo traslaciones a lo largo del eje x.
La solucion del problema de valores iniciales se obtiene aplicando el teorema fundamental delcalculo: si t0 esta en I entonces
u(t) = x0 +
∫ t
t0
f(s) ds
es la solucion definida en I que cumple la condicion u(t0) = x0 (en general esta solucion no se puedeexpresar como combinacion finita de funciones elementales). La aparicion de x0 como constanteaditiva muestra que si una curva es solucion de la ecuacion diferencial, cualquier curva obtenidatrasladando verticalmente la dada tambien es solucion, de acuerdo con la simetrıa del campo dedirecciones.
Ejemplo 2.6 La solucion al problema de valores iniciales de
dx
dt= t
es
u(t) = x0 +t2
2− t20
2.
El campo de direcciones y siete soluciones de la ecuacion aparecen en la figura 2.2.

2.4. ECUACIONES CON VARIABLES SEPARABLES 11
2.4. Ecuaciones con variables separables
Definicion 2.4 La ecuacion de primer orden x′ = f(t, x) se denomina de variables separables si lafuncion f es producto de una funcion de t y una funcion de x, es decir, si la ecuacion es de la forma
dx
dt= g(t)h(x).
Como hemos visto en la seccion anterior, el caso h(x) ≡ 1 se resuelve mediante el teorema fundamentaldel calculo. Las ecuaciones de primer orden autonomas, que corresponden a g(t) ≡ 1, tambien sonde variables separables.
Esquematicamente, el metodo de separacion de variables consiste en “dividir” la ecuacion dife-rencial por h(x) e integrar:
dx
dt= g(t)h(x),
dx
h(x)= g(t)dt,
∫dx
h(x)=
∫g(t) dt+ c
donde c es una constante arbitraria. Denotando por H y G primitivas de 1/h y g respectivamente,la ecuacion anterior se escribe
H(x) = G(t) + c
y cabe esperar que mediante restricciones adecuadas esta ecuacion determine x en funcion de t.La demostracion de que la separacion de variables conduce a soluciones de la ecuacion de partida
se puede hacer aplicando la regla de la cadena a la ecuacion anterior:
H ′(x)x′(t) = G′(t),1
h(x)x′(t) = g(t), x′(t) = g(t)h(x)
y las restricciones mencionadas en el parrafo anterior se deben a posibles ceros de la funcion h(x),que dan lugar a soluciones constantes.
2.4.1. Metodo de separacion de variables
1. Resolver la ecuacion h(x) = 0 para obtener las soluciones constantes.
2. Restringir x a un intervalo en el que h(x) no se anule, separar variables e integrar.
3. Restringir la constante de integracion c de modo que la ecuacion H(x) = G(t) + c tenga almenos una solucion (t, x).
4. Separar en intervalos los valores de t obtenidos en el paso anterior.
Se puede demostrar que si la ecuacion tiene la propiedad de unicidad (para lo cual es suficiente queg sea continua y h tenga derivada continua) este metodo da todas las soluciones (maximales) de laecuacion.

12 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
-2 -1 0 1 2 3
-2
-1
0
1
2
3
Figura 2.3: Soluciones de la ecuacion x′ = x.
2.4.2. Ejemplo 1
La ecuaciondx
dt= x
tiene la solucion constante u(t) ≡ 0. Si x 6= 0, mediante separacion de variables se obtiene∫dx
x= t+ c, ln |x| = t+ c, |x| = et+c = ket
con k = ec > 0, o lo que es equivalentex = cet
con c arbitraria (c = 0 da la solucion constante). La solucion del problema de valores iniciales es
u(t) = x0et−t0 .
Estas soluciones estan definidas para todo t real y cubren el plano (t, x).

2.4. ECUACIONES CON VARIABLES SEPARABLES 13
-2 -1 0 1 2 3
-2
-1
0
1
2
3
Figura 2.4: Soluciones de la ecuacion x′ = 2tx2.
2.4.3. Ejemplo 2
La ecuaciondx
dt= 2tx2
tiene la solucion constante u(t) ≡ 0. Si x 6= 0, mediante separacion de variables se obtiene∫dx
x2=
∫2t dt, −1
x= t2 + c, x = − 1
t2 + c.
A continuacion es preciso extraer de esta relacion soluciones de la ecuacion diferencial:
Si c es positivo se obtiene una solucion definida para todo t real.
Si c = 0 se obtienen dos soluciones, una definida para t > 0 y otra definida para t < 0.
Si c es negativo se obtienen tres soluciones, una (positiva) definida si −√−c < t <
√−c y dos
soluciones (negativas) definidas en t < −√−c y en
√−c < t respectivamente.
El teorema de existencia y unicidad implica que por cada punto (t0, x0) del plano pasa una y solouna solucion, que si x0 6= 0 corresponde al valor
c = −t20 −1
x0
(x0 6= 0).
En resumen, la solucion al problema de valores iniciales es
u(t) = − 1
t2 − t20 − 1/x0
si x0 6= 0,
u(t) ≡ 0 si x0 = 0.
Las soluciones aparecen en la figura 2.4.

14 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
2.5. Ecuaciones autonomas
En el caso de una ecuacion autonoma de primer orden
dx
dt= f(x)
se puede obtener una descripcion cualitativa completa de las soluciones aunque no se puedan calcularsus formulas en terminos de funciones elementales. En adelante supondremos que f ′ es continua paratodo x, de modo que la ecuacion tenga una unica solucion para cada condicion inicial u(t0) = x0.
2.5.1. Propiedades elementales de las soluciones
Geometricamente, el campo de direcciones que define la ecuacion es invariante bajo traslacionesa lo largo del eje t, lo que tiene las siguientes consecuencias inmediatas:
Si una curva solucion se traslada paralelamente al eje t se obtiene otra curva solucion. Es decir,si u es una solucion y c un numero real cualquiera, la funcion v definida por v(t) = u(t+ c) esuna solucion:
v′(t) = u′(t+ c) = f(u(t+ c)) = f(v(t)).
Si para algun t0 se tiene u′(t0) = 0, entonces se cumple f(u(t0)) = 0, y como consecuencia dela unicidad u es la solucion constante u(t) ≡ u(t0).
Salvo las soluciones constantes, ninguna solucion puede tener maximos o mınimos relativos. Esdecir, toda solucion o es constante, o es estrictamente creciente o es estrictamente decreciente.
Si una solucion permanece acotada debe tender asintoticamente a una solucion constante.
En efecto, si |u(t)| ≤ K para todo t ≥ t0 y u no es constante, es estrictamente monotona. Perotoda funcion monotona y acotada tiende a un lımite, luego existe
lımt→∞
u(t) = a.
Ademas, como la funcion f es continua,
lımt→∞
f(u(t)) = f(a) = lımt→∞
u′(t).
Si fuera f(a) > 0, entonces para t ≥ T suficientemente grande se tendrıa
u′(t) >f(a)
2
e integrando entre T y t
u(t) > u(T ) +f(a)
2(t− T ) t > T
en contra de la hipotesis de que u(t) esta acotada. Analogamente se demuestra que no es posiblef(a) < 0, con lo que se concluye que f(a) = 0 y por tanto v(t) ≡ a es una solucion constante.Un razonamiento analogo es valido cuando t→ −∞.
Como consecuencia de estas propiedades, si la ecuacion diferencial no tiene soluciones constantestoda solucion toma todos los valores reales, ya que las soluciones son monotonas y de estar acotadastenderıan a soluciones constantes.

2.5. ECUACIONES AUTONOMAS 15
2 1 0 -1 -2
x - x3
-2
-1
0
1
2
3x
-3 -2 -1 0 1 2 3
t
-3
-2
-1
0
1
2
3
x
-3 -2 -1 0 1 2 3
t
-2
-1
0
1
2
3
x
Figura 2.5: Grafica de la funcion f(x) = x− x3 y soluciones de la ecuacion autonoma x′ = x− x3.
2.5.2. Ejemplo
Como ilustracion de estos resultados, en la figura 2.5 aparecen las soluciones de la ecuacionautonoma
dx
dt= x− x3.
Las soluciones constantes son u(t) ≡ −1, u(t) ≡ 0 y u(t) ≡ 1.
Todas las soluciones u tales que −1 ≤ u(t) ≤ 1 para algun t estan definidas para todo t real.
Puesto que f(x) < 0 si −1 < x < 0, las soluciones comprendidas entre x = −1 y x = 0 sondecrecientes, tienden a −1 cuando t→∞, y tienden a 0 cuando t→∞.
Puesto que f(x) > 0 si 0 < x < 1, las soluciones comprendidas entre x = 0 y x = 1 soncrecientes, tienden a 1 cuando t→∞, y tienden a 0 cuando t→ −∞.
Puesto que f(x) < 0 si x > 1, las soluciones con valores iniciales x0 > 1 son decrecientes ytienden a 1 cuando t→∞.
Puesto que f(x) > 0 si x < −1, las soluciones con valores iniciales x0 < −1 son crecientes ytienden a −1 cuando t→∞.
Todas las curvas de cada una de las cuatro bandas se obtiene mediante traslacion horizontalde una curva cualquiera de esa banda.
En este ejemplo el metodo de separacion de variables permite obtener formulas para las solucionesno constantes: ∫
dx
x− x3=
1
2
∫ (2
x− 1
x− 1− 1
x+ 1
)dx =
∫dt,
−1
2ln
∣∣∣∣(x− 1)(x+ 1)
x2
∣∣∣∣ = −1
2ln
∣∣∣∣1− 1
x2
∣∣∣∣ = t− c,
x = ± 1√1± e−2(t−c)

16 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
que da lugar a las siguientes soluciones (en el orden de las bandas):
u(t) =1√
1− e−2(t−c), t > c
u(t) =1√
1 + e−2(t−c)
u(t) = − 1√1 + e−2(t−c)
u(t) = − 1√1− e−2(t−c)
, t > c.
2.5.3. Estabilidad
Definicion 2.5 Sea u(t) ≡ c una solucion constante de la ecuacion autonoma x′ = f(x).
Se dice que la solucion constante u(t) ≡ c es estable si para todo ε > 0 existe un δ > 0 tal quesi v es una solucion que satisface la condicion inicial |v(t0)− c| < δ entonces |v(t)− c| < ε paratodo t ≥ t0.
Si ademas existe un δ > 0 tal que |v(t0) − c| < δ implique lımt→∞ v(t) = c, se dice que lasolucion constante u(t) ≡ c es asintoticamente estable.
Cuando se quiere especificar que una solucion es estable pero no asintoticamente estable se diceque es debilmente estable.
Una solucion constante no estable se dice que es inestable.
Ejemplo 2.7 La figura 2.5 ilustra que las soluciones constantes u(t) ≡ −1 y u(t) ≡ 1 son asintoti-camente estables, mientras que u(t) = 0 es inestable.
Teorema 2.4 Condicion necesaria y suficiente para que u(t) ≡ c sea asintoticamente estable esque f(x) > 0 para todo x suficientemente proximo a c y menor que c y que f(x) < 0 para todo xsuficientemente proximo a c y mayor que c.
En particular, si f(c) = 0 y f ′(c) < 0 entonces u(t) ≡ c es asintoticamente estable, y si f(c) = 0y f ′(c) > 0 entonces u(t) ≡ c es inestable.
Si f(c) = 0 y f ′(c) = 0 la solucion puede ser debilmente estable (por ejemplo, cualquier solucionde x′ = 0), inestable (por ejemplo, la solucion nula de x′ = x3), e incluso asintoticamente estable(por ejemplo, la solucion nula de x′ = −x3).

2.6. ECUACION LINEAL 17
0 1 2 3 4 5
-2
-1
0
1
2
1 2 3 4
-2
-1
0
1
2
Figura 2.6: Campo de direcciones y siete soluciones de la ecuacion lineal homogenea de primer ordenx′ = (t/10 + sen(πt))x.
2.6. Ecuacion lineal
La ecuacion diferencial lineal de primer orden es
x′ = a(t)x+ b(t)
y sus soluciones pueden expresarse mediante integrales con una formula debida a Leibniz. En adelantesupondremos que a(t) y b(t) estan definidas y son continuas en un intervalo I, con lo que la ecuaciondiferencial tiene la propiedad de unicidad, ya que f(t, x) = a(t)x+b(t) y ∂f/∂x = a(t) son continuas.
2.6.1. Ecuacion lineal homogenea
La ecuacion lineal homogeneax′ = a(t)x
se puede resolver mediante separacion de variables:
u(t) = c e∫ t a(τ) dτ
donde c = 0 da la solucion constante identicamente nula (tambien llamada solucion trivial). Enparticular, salvo la solucion identicamente nula, ninguna solucion se anula en el intervalo I. Todaslas soluciones estan definidas para todo t del intervalo I. Como todas las soluciones son multiplos deuna cualquiera no nula u1(t) 6≡ 0, es decir,
u(t) = cu1(t),
sus graficas tienen el aspecto ilustrado en la figura 2.6.
Teorema 2.5 Si t0 esta en I y x0 es un numero cualquiera, entonces la solucion de la ecuacionx′ = a(t)x que cumple u(t0) = x0 es
u(t) = x0 e∫ tt0a(τ)dτ
.

18 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
2.6.2. Metodo de variacion de constantes
Sea u1(t) una solucion no nula de la ecuacion homogenea x′ = a(t)x. El metodo de variacion deconstantes consiste en buscar una funcion c(t) tal que x(t) = c(t)u1(t) sea solucion de la ecuacion nohomogenea x′ = a(t)x+ b(t). Para ello es suficiente que
c′u1 + cu′1 = a(t)cu1 + b(t)
y puesto que u1(t) es solucion de la ecuacion homogenea, es decir, u′1 = a(t)u1, la condicion anteriorse reduce a
c′(t)u1(t) = b(t).
Como u1(t) 6= 0, basta con tomar
c(t) =
∫ t b(s)
u1(s)ds+ c1
para todo t del intervalo I, donde c1 es una constante arbitraria.
Teorema 2.6 La solucion general w de la ecuacion lineal x′ = a(t)x+ b(t) es la suma de la soluciongeneral de la ecuacion reducida x′ = a(t)x y de una solucion particular de la solucion completa:
w(t) = c1u1(t) + u1(t)
∫ t b(s)
u1(s)ds.
La diferencia entre dos soluciones de la ecuacion completa es una solucion de la ecuacion homogenea.
En efecto, fijada una primitiva de b(t)/u1(t), al ser u1(t0) 6= 0 cualquier problema de valores inicialesw(t0) = x0 con t0 en el intervalo I se puede resolver despejando c1 en la expresion anterior.
2.6.3. Formula de Leibniz
Teorema 2.7 La solucion general de la ecuacion lineal x′ = a(t)x+ b(t) es
w(t) = ce∫ t a(τ)dτ + e
∫ t a(τ)dτ
∫ t
e−∫ s a(τ)dτb(s)ds
donde t pertenece a I y c es una constante arbitraria. La solucion que cumple w(t0) = x0 es
w(t) = x0e∫ tt0a(τ)dτ
+ e∫ tt0a(τ)dτ
∫ t
t0
e−
∫ st0a(τ)dτ
b(s)ds
o equivalentemente
w(t) = x0e∫ tt0a(τ)dτ
+
∫ t
t0
e∫ ts a(τ)dτb(s)ds.
En particular si 0 esta en el intervalo I, la solucion que cumple v(0) = 0 esta dada por
v(t) =
∫ t
0
G(t, s)b(s)ds.
donde G(t, s) = e∫ ts a(τ)dτ se denomina funcion de Green para el problema de valores iniciales.
Ejemplo 2.8 La ecuacion diferencial que se utilizo para ilustrar el concepto de campo de direcciones
x′ = t− 2x
es una ecuacion lineal. Poniendo a(t) = −2, b(t) = t en la formula de Leibniz se obtiene
w(t) = −1
4+t
2+ e−2(t−t0)
(x0 +
1
4− t0
2
).

2.7. FORMAS DIFERENCIALES 19
2.7. Formas diferenciales
Las ecuaciones diferenciales explıcitas no permiten describir curvas con tangente vertical en algunode sus puntos, que requieren una representacion implıcita (es decir, como soluciones de una ecuaciondel tipo F (x, y) = 0) o parametrica (es decir, en la forma (x, y) = (u(t), v(t))).
Ejemplo 2.9 Las circunferencias centradas en el origen se pueden describir mediante x2 + y2 = r2
o mediante (x, y) = (r cos t, r sen t) con r > 0. La ecuacion diferencial normal correspondiente paray en funcion de x es dy/dx = −x/y que es singular en los puntos (x, y) = (±r, 0).
Las formas diferenciales van a permitir expresar condiciones sobre los vectores tangentes a una curva(x, y) = (u(t), v(t)) sin la restriccion de que la curva carezca de tangentes verticales.
Definicion 2.6 Una forma diferencial
ω = P (x, y) dx+Q(x, y) dy
define en cada punto del plano (x, y) una forma lineal que actua sobre los vectores tangentes en dichopunto del plano: si v = (v1, v2) es un vector tangente en el punto (x0, y0), entonces
ω(v) = P (x0, y0)v1 +Q(x0, y0)v2.
En particular, si (u(t), v(t)) es una curva con vector tangente v = (u′(t), v′(t)), entonces la forma ωhace corresponder al vector tangente v en el punto (x, y) = (u(t), v(t)) el numero
ω(v) = P (u(t), v(t))u′(t) +Q(u(t), v(t))v′(t).
Ejemplo 2.10 Sean las formas diferenciales
ω1 = dx,
ω2 = xdy,
ω3 = 2xdx+ 2ydy.
La accion de cada una de estas formas diferenciales sobre los vectores tangentes v1, v2 y v3 de lafigura 2.7 esta dada en la siguiente tabla:
v1 v2 v3
ω1 0 −1 1ω2 0 −2 −2ω3 0 −8 0
Definicion 2.7 Se denomina integral de la forma diferencial ω = P (x, y) dx+Q(x, y) dy a lo largode la curva γ definida por las funciones (u(t), v(t)) en el intervalo [a, b] a la integral∫
γ
ω =
∫ b
a
ω(v)dt
=
∫ b
a
[P (u(t), v(t))u′(t) +Q(u(t), v(t))v′(t)]dt.

20 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
1 2 3
1
2
v1
v2 v3
Figura 2.7: Tres vectores tangentes en el plano (x, y).
Definicion 2.8 Una forma diferencial ω = P (x, y) dx+Q(x, y) dy se denomina exacta si existe unafuncion H(x, y) tal que
P (x, y) =∂H
∂x, Q(x, y) =
∂H
∂y
de modo que ω = dH.
Teorema 2.8 La integral de una forma diferencial exacta ω = dH a lo largo de una curva γ solodepende del punto inicial y del punto final de la curva:∫
γ
ω = H(u(b), v(b))−H(u(a), v(a)).
En efecto: ∫γ
ω =
∫ b
a
[P (u(t), v(t))u′(t) +Q(u(t), v(t))v′(t)]dt
=
∫ b
a
[Hx(u(t), v(t))u′(t) +Hy(u(t), v(t))v′(t)]dt
=
∫ b
a
d
dt[H(u(t), v(t))]dt
= H(u(b), v(b))−H(u(a), v(a)).
Teorema 2.9 Si la forma diferencial ω = P (x, y) dx + Q(x, y) dy esta definida en todo el plano, lacondicion necesaria y suficiente para que sea exacta es la igualdad de las derivadas parciales cruzadas:
∂Q
∂x=∂P
∂y.
Entonces
H(x, y) = x
∫ 1
0
P (tx, ty)dt+ y
∫ 1
0
Q(tx, ty)dt
=
∫ x
0
P (t, 0)dt+
∫ y
0
Q(x, t)dt.

2.8. ECUACIONES EXACTAS 21
2.8. Ecuaciones exactas
En el resto del capıtulo se van a estudiar ecuaciones de la forma
P (x, y) dx+Q(x, y) dy = 0.
Geometricamente la ecuacion impone que (salvo en los puntos en los que P y Q se anulen simultanea-mente) el vector tangente (x′(t), y′(t)) a la curva solucion en el punto (x0, y0) sea perpendicular alvector (P (x0, y0), Q(x0, y0)).
Definicion 2.9 Se dice que la ecuacion
P (x, y) dx+Q(x, y) dy = 0
es exacta si la forma diferencial asociada
ω = P (x, y) dx+Q(x, y) dy
es exacta.
Teorema 2.10 Si la ecuacion
P (x, y) dx+Q(x, y) dy = 0
es exacta y las funciones P y Q son continuas, entonces en un entorno de cada punto (x0, y0) en elque no se anulen simultaneamente P (x0, y0) y Q(x0, y0) las curvas solucion pueden escribirse en laforma H(x, y) = c, con c real y
∂H
∂x= P (x, y),
∂H
∂y= Q(x, y).
Ejemplo 2.11 La ecuacion
(x− y2) dx+ (2y − 2xy) dy = 0
es exacta, ya que∂Q
∂x= −2y =
∂P
∂y.
Aplicando la formula de la seccion anterior se obtiene
H(x, y) = x
∫ 1
0
(tx− t2y2)dt+ y
∫ 1
0
(2ty − 2t2xy)dt
=x2
2+ y2 − xy2.
y las soluciones estan definidas implıcitamente por
x2
2+ y2 − xy2 = c.

22 CAPITULO 2. ECUACIONES DE PRIMER ORDEN
2.9. Factores integrantes
Sea M(x, y) una funcion con derivadas parciales continuas y tal que M(x, y) > 0 para todo (x, y)del plano. Es inmediato que
P (x, y) dx+Q(x, y) dy = 0
si y solo siM(x, y)P (x, y) dx+M(x, y)Q(x, y) dy = 0,
y en ciertos casos una ecuacion no exacta puede transformarse en una exacta multiplicando por unfactor M(x, y).
Definicion 2.10 Una funcion M(x, y) > 0 se dice que es un factor integrante de la ecuacion
P (x, y) dx+Q(x, y) dy = 0
si la ecuacionM(x, y)P (x, y) dx+M(x, y)Q(x, y) dy = 0
es exacta, es decir, si∂(MQ)
∂x=∂(MP )
∂y.
Equivalentemente, M(x, y) es un factor integrante de la forma diferencial ω si Mω = dH, en cuyocaso las soluciones de ambas ecuaciones estan definidas implıcitamente por H(x, y) = c.
No existe un metodo general para calcular un factor integrante, aunque existen criterios validosen algunos casos particulares. Por ejemplo, para que una ecuacion admita un factor integrante M(x)que sea funcion solo de x, el segundo miembro de
M ′(x)
M(x)= − 1
Q(x, y)
(∂Q
∂x− ∂P
∂y
)debe ser independiente de y y funcion continua de x, en cuyo caso se obtiene
M(x) = e−∫ Qx(x,y)−Py(x,y)
Q(x,y)dx.
Tambien se pueden utilizar factores integrantes negativos (M(x, y) < 0).
Ejemplo 2.12 En el caso de la ecuacion
−(xy − y + sen y) dx+ (x+ cos y) dy = 0
se tiene que
− 1
Q(x, y)
(∂Q
∂x− ∂P
∂y
)= −1
y por tanto M(x) = e−x es un factor integrante. En otras palabras, la forma diferencial
ω = −(xy − y + sen y) dx+ (x+ cos y) dy
no es exacta, mientras que
Mω = −e−x(xy − y + sen y) dx+ e−x(x+ cos y) dy
sı lo es, es decir, Mω = dH para una cierta funcion H(x, y). Con la formula usual se obtiene
H(x, y) = e−x(xy + sen y)
y las soluciones estan definidas implıcitamente por la ecuacion H(x, y) = c.

2.9. FACTORES INTEGRANTES 23
2.9.1. Factores integrantes locales
Hasta ahora se han considerado unicamente factores integrantes globales, en el sentido de que lafuncion M(x, y) cumple en todo el plano las condiciones exigidas a un factor integrante. Tambienexisten factores integrantes locales, que cumplen las condiciones exigidas solamente en una regiondel plano, a la que por tanto se restringe su uso.
Ejemplo 2.13 La ecuacion(cy + dxy) dx+ (ax+ bxy) dy = 0
admite un factor integrante local M(xy) que depende solo del producto xy.Para que esto sea cierto en general es preciso que el segundo miembro de
M ′(xy)
M(xy)= − 1
yQ(x, y)− xP (x, y)
(∂Q
∂x− ∂P
∂y
)sea funcion unicamente del producto xy. En este caso se comprueba que
− 1
yQ(x, y)− xP (x, y)
(∂Q
∂x− ∂P
∂y
)= − 1
xy
luego
M(xy) =1
|xy|es un factor integrante en el interior de cada uno de los cuatro cuadrantes.
Por ultimo, notese que los factores integrantes (globales o locales) en general no son unicos ypueden existir factores integrantes de una misma forma diferencial con dependencia distinta en lasvariables (x, y).
Ejemplo 2.14 Sea ω = y dx− x dy.
y dx− x dyy2
= d
(x
y
),
y dx− x dyx2 + y2
= d
(arctan
(x
y
)),
y dx− x dyxy
= d
(ln
(x
y
)).

24 CAPITULO 2. ECUACIONES DE PRIMER ORDEN

Capıtulo 3
ECUACIONES LINEALES
3.1. Funciones complejas de variable real
Tanto desde el punto de vista teorico como de las aplicaciones es conveniente admitir desdeun principio que los coeficientes y las soluciones de las ecuaciones lineales puedan tomar valorescomplejos. Mas concretamente, se consideraran funciones f cuyo dominio es un intervalo I de larecta real y cuyos valores son numeros complejos. Designando por g y h la parte real y la parteimaginaria de f respectivamente, se tiene que
f(t) = g(t) + ih(t), t ∈ I.
Notese que g y h son funciones reales definidas en el intervalo real I. Los lımites se definen mediante
lımt→t0
f(t) = α + iβ ≡ lımt→t0
g(t) = α y lımt→t0
h(t) = β.
Se dice que f es continua, derivable o integrable si lo son tanto su parte real como su parte imaginaria.La derivada de f esta dada por
f ′(t) = g′(t) + ih′(t).
Analogamente, ∫f(t) dt =
∫g(t) dt+ i
∫h(t) dt.
Finalmente, se define la conjugada de f como
f(t) = g(t)− ih(t), t ∈ I.
Entre las funciones de variable real con valores complejos que se usaran con mas frecuencia figuranlos polinomios con coeficientes complejos a0, . . . , an,
p(t) = a0 + a1t+ · · ·+ antn, t ∈ I,
y la exponencial compleja. Si a = α + iβ es un numero complejo y t ∈ I se define la exponencialcompleja eat mediante
eat = eαt cos(βt) + ieαt sen(βt).
(El numero real t podrıa omitirse en esta definicion, ya que tanto α como β son numeros realesarbitrarios, pero se mantiene explıcitamente para facilitar su uso posterior.) Calculos directos conesta definicion permiten comprobar cinco propiedades que se usaran repetidamente (a = α + iβ yb = γ + iδ denotan numeros complejos, y t ∈ I):
25

26 CAPITULO 3. ECUACIONES LINEALES
eatebt = e(a+b)t.
d
dteat = aeat.
Si a 6= 0,
∫eat dt =
1
aeat. Si a = 0 entonces eat = 1 y la integral es t.
eat = eat.
cos(βt) =eiβt + e−iβt
2, sen(βt) =
eiβt − e−iβt
2i.
3.2. Ecuaciones lineales de segundo orden
La forma general de la ecuacion diferencial lineal de segundo orden es
x′′ + a1(t)x′ + a2(t)x = b(t).
Como se ha indicado en la seccion anterior, tanto desde el punto de vista teorico como de lasaplicaciones es conveniente admitir desde un principio que los coeficientes a1(t), a2(t) y b(t) y lassoluciones w(t) puedan tomar valores complejos. El teorema de existencia y unicidad correspondientees el siguiente:
Teorema 3.1 Sean a1(t), a2(t) y b(t) funciones complejas continuas definidas en un intervalo I.Dado un numero real t0 en I y dos numeros complejos cualesquiera x0, x1, existe una unica solucionmaximal w de la ecuacion diferencial x′′+a1(t)x′+a2(t)x = b(t) que cumple las condiciones inicialesw(t0) = x0, w′(t0) = x1. El intervalo de definicion de w es el intervalo I.
Geometricamente, dos soluciones reales distintas pueden cortarse en un punto pero no pueden tenerademas la misma tangente en el punto.
3.2.1. Operadores diferenciales lineales
Es conveniente escribir las ecuaciones diferenciales lineales en terminos del operador diferencial
L =d2
dt2+ a1(t)
d
dt+ a2(t)
cuya accion sobre una funcion x dos veces derivable es
L(x) =d2x
dt2+ a1(t)
dx
dt+ a2(t)x = x′′ + a1(t)x′ + a2(t)x.
La propiedad fundamental del operador L es la linealidad: si x, y son funciones dos veces derivablesy c es una constante real o compleja
L(x+ y) = L(x) + L(y)
L(cx) = cL(x).
Con esta notacion la ecuacion lineal no homogenea (ecuacion completa) se escribe
L(x) = b(t)
y la ecuacion homogenea asociada (ecuacion reducida) se escribe
L(x) = 0.

3.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 27
3.2.2. Dependencia lineal de funciones
Sean u, u1, . . . , un funciones definidas en un mismo intervalo I de la recta real.
Definicion 3.1 Se dice que la funcion u es combinacion lineal de u1, . . . , un con coeficientes c1, . . . , cnsi u(t) = c1u1(t) + · · ·+ cnun(t) para todo t de I.
Definicion 3.2 Se dice que las funciones u1, . . . , un son linealmente dependientes si existen constan-tes c1, . . . , cn no todas nulas tales que c1u1(t) + · · ·+ cnun(t) = 0 para todo t de I. En caso contrariose dice que las funciones son linealmente independientes.
En particular dos funciones u1 y u2 son linealmente dependientes si y solo si una de ellas es unmultiplo de la otra. Es decir, si existe una constante c tal que u1(t) = cu2(t) o u2(t) = cu1(t) paratodo t de I.
Ejemplo 3.1 Las funciones u1(t) ≡ 1, u2(t) = cos(2t) y u3(t) = sen2 t son linealmente dependientesya que
u1(t)− u2(t)− 2u3(t) ≡ 0.
Teorema 3.2 Si las funciones u1, . . . , un son linealmente dependientes y derivables hasta el ordenn− 1, entonces su wronskiano
W (t) =
∣∣∣∣∣∣∣∣∣u1(t) · · · un(t)u′1(t) · · · u′n(t)
.... . .
...
u(n−1)1 (t) · · · u
(n−1)n (t)
∣∣∣∣∣∣∣∣∣es identicamente nulo en I.
Si las funciones son linealmente dependientes, existen constantes c1, . . . , cn no todas nulas tales quec1u1(t)+ · · ·+cnun(t) = 0 para todo t de I. Derivando n−1 veces esta identidad se obtiene el sistemahomogeneo de n ecuaciones lineales con n incognitas
c1u1(t) + · · ·+ cnun(t) = 0
c1u′1(t) + · · ·+ cnu
′n(t) = 0
...
c1u(n−1)1 (t) + · · ·+ cnu
(n−1)n (t) = 0.
Puesto que este sistema tiene soluciones c1, . . . , cn no triviales, el determinante de su matriz decoeficientes, que es el wronskiano, ha de ser nulo para todo t del intervalo I.
El recıproco de este teorema en general es falso.1 Por ejemplo, las funciones u1(t) = t2 y u2(t) = t|t|son derivables, su wronskiano es
W (t) =
∣∣∣∣t2 t|t|2t 2|t|
∣∣∣∣ = 0
y sin embargo son linealmente independientes. Veremos que esta situacion no se da si las funcionesson soluciones de la misma ecuacion diferencial lineal homogenea.
1Es condicion suficiente para que las funciones sean linealmente dependientes que W (t) se anule identicamente enel intervalo I sin que en ningun punto del intervalo I se anulen simultaneamente los cofactores de los elementos de laultima fila de W (t).

28 CAPITULO 3. ECUACIONES LINEALES
3.2.3. Soluciones de la ecuacion homogenea
Teorema 3.3 Toda combinacion lineal de soluciones de la ecuacion homogenea L(x) = 0 es tambiensolucion de dicha ecuacion homogenea.
Si L(u1) = 0, . . . , L(um) = 0 y c1, . . . , cm son constantes reales o complejas, entonces
L(c1u1 + · · ·+ cmum) = c1L(u1) + · · ·+ cmL(um) = 0.
Teorema 3.4 Si u es una solucion de la ecuacion homogenea L(x) = 0 que para cierto t0 cumpleu(t0) = 0, u′(t0) = 0, entonces u(t) ≡ 0.
Es consecuencia inmediata de la unicidad.
Teorema 3.5 Dos soluciones u1 y u2 de la ecuacion homogenea L(x) = 0 son linealmente depen-dientes si y solo si su wronskiano se anula para algun valor t0.
En la seccion anterior hemos demostrado que si u1 y u2 son linealmente dependientes, su wronskianoes identicamente nulo (es decir, se puede tomar como t0 cualquier punto). Recıprocamente, si elwronskiano se anula en un punto t0, el sistema de ecuaciones
c1u1(t0) + c2u2(t0) = 0
c1u′1(t0) + c2u
′2(t0) = 0
tiene solucion c1, c2 no nula. Por tanto la funcion u(t) = c1u1(t) + c2u2(t) es solucion de la ecuacionhomogenea y cumple la condicion inicial u(t0) = 0, u′(t0) = 0. La unicidad implica que u(t) ≡ 0 ypor tanto u1 y u2 son linealmente dependientes.
Teorema 3.6 (Formula de Abel) El wronskiano W (t) de dos soluciones u1 y u2 de la ecuacionhomogenea L(x) = 0 cumple
W (t) = W (t0)e−
∫ tt0a1(s) ds
.
En particular si a1(t) ≡ 0 (es decir, si la ecuacion carece de termino en x′) el wronskiano es constante.
Derivando el wronskiano
W (t) = u1(t)u′2(t)− u2(t)u′1(t)
y utilizando que u1 y u2 son soluciones de la ecuacion homogenea se obtiene:
W ′(t) = u1u′′2 − u2u
′′1
= u1(−a1(t)u′2 − a2(t)u2)− u2(−a1(t)u′1 − a2(t)u1)
= −a1(t)(u1u′2 − u2u
′1)
= −a1(t)W (t),
de donde se sigue inmediatamente el teorema.
Teorema 3.7 El wronskiano de dos soluciones de la ecuacion homogenea L(x) = 0 o es nulo paratodo t o no lo es para ningun t. En el primer caso las soluciones son linealmente dependientes; en elsegundo caso son linealmente independientes. En particular las soluciones u1 y u2 que cumplen lascondiciones iniciales u1(t0) = 1, u′1(t0) = 0 y u2(t0) = 0, u′2(t0) = 1 son linealmente independientes,ya que W (t0) = 1.

3.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 29
Teorema 3.8 Sean u1 y u2 dos soluciones linealmente independientes de la ecuacion homogeneaL(x) = 0. Toda solucion de dicha ecuacion homogenea es combinacion lineal de u1 y u2.
Sea u una solucion arbitraria de la ecuacion homogenea. Puesto que el sistema de ecuaciones
c1u1(t0) + c2u2(t0) = u(t0)
c1u′1(t0) + c2u
′2(t0) = u′(t0)
tiene determinante de su matriz de coeficientes W (t0) 6= 0, existe una unica solucion (c1, c2). Seav(t) = c1u1(t) + c2u2(t). La funcion v es combinacion lineal de u1 y u2, y por tanto solucion de laecuacion. Ademas v(t0) = u(t0) y v′(t0) = u′(t0), luego u = v.
3.2.4. Teorema de separacion de Sturm
El teorema de separacion de Sturm muestra que si dos soluciones reales u1 y u2 de la ecuacionhomogenea son linealmente independientes sus ceros estan intercalados, en el sentido de que u1 seanula exactamente una vez entre cada dos ceros consecutivos de u2 y recıprocamente.
Teorema 3.9 Sean u1, u2 soluciones reales linealmente independientes de la ecuacion homogenea
x′′ + a1(t)x′ + a2(t)x = 0
tales que u1(t) 6= 0 en a < t < b, u1(a) = 0 y u1(b) = 0. Entonces existe un numero c tal quea < c < b y u2(c) = 0.
Notese que u2(a) 6= 0 y u2(b) 6= 0, ya que en caso contrario el wronskiano de u1 y u2 se anularıa ylas soluciones no serıan linealmente independientes (en otras palabras, dos soluciones de la ecuacionhomogenea linealmente independientes no pueden tener un cero comun).
Si ademas fuera u2(t) 6= 0 en todo t tal que a < t < b, entonces u2(t) no se anularıa en a ≤ t ≤ b.Aplicando el teorema de Rolle a la funcion f = u1/u2 en dicho intervalo, existirıa un numero c talque a < c < b y
f ′(c) =u′1(c)u2(c)− u1(c)u′2(c)
[u2(c)]2= 0.
Pero el numerador es menos el wronskiano de u1 y u2, con lo que estas soluciones serıan linealmentedependientes en contra de la hipotesis.
3.2.5. Forma autoadjunta
Si la funcion a1(t) es derivable, la sustitucion
x = e−12
∫ t0 a1(s) dsy
transforma la ecuacion homogenea de segundo orden
x′′ + a1(t)x′ + a2(t)x = 0
en la ecuacion sin termino en la primera derivada
y′′ + a(t)y = 0
donde
a(t) = a2(t)− 1
2a′1(t)− 1
4a1(t)2.
Cuando se estudian problemas de contorno es conveniente utilizar esta forma de la ecuacion, que seconoce como forma autoadjunta.

30 CAPITULO 3. ECUACIONES LINEALES
3.2.6. Teorema de comparacion de Sturm
Teorema 3.10 Sean u y v soluciones reales no nulas de las ecuaciones
x′′ + p(t)x = 0
y
x′′ + q(t)x = 0
respectivamente, donde p(t) > q(t) > 0 para todo t del intervalo I. Entonces u se anula al menosuna vez entre cada dos ceros sucesivos de v.
En efecto, sean t1 y t2 dos ceros sucesivos de v, de modo que v(t1) = 0, v(t2) = 0 y v(t) 6= 0si t1 < t < t2. No hay restriccion en tomar v(t) > 0. Supongase ademas que fuera u(t) > 0 ent1 < t < t2 y sea W (t) el wronskiano
W (t) = u(t)v′(t)− u′(t)v(t).
Entonces si t1 < t < t2
W ′(t) = u′(t)v′(t) + u(t)v′′(t)− u′′(t)v(t)− u′(t)v′(t)= (p(t)− q(t))u(t)v(t) > 0
e integrando esta desigualdad entre t1 y t2 se obtiene
ϕ(t2)− ϕ(t1) > 0.
Pero
ϕ(t1) = u(t1)v′(t1) ≥ 0 ϕ(t2) = u(t2)v′(t2) ≤ 0
lo que conduce a una contradiccion.
3.2.7. Ecuacion de Riccati
La ecuacion lineal homogenea de segundo orden se puede transformar en una ecuacion no linealde primer orden denominada ecuacion de Riccati, cuya forma general es
y′ = A(t)y2 +B(t)y + C(t).
Si u es una solucion de la ecuacion lineal
x′′ + a1(t)x′ + a2(t)x = 0
y u no se anula en un intervalo I, entonces se puede escribir
u(t) = e∫ tt0v(s) ds
donde t0 y t estan en I. Sustituyendo en la ecuacion lineal, la funcion v es una solucion de la ecuacionde Riccati:
v′(t) + v(t)2 + a1(t)v(t) + a2(t) = 0.

3.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 31
3.2.8. Reduccion del orden de la ecuacion
Teorema 3.11 Sean u1 una solucion no nula de la ecuacion homogenea
x′′ + a1(t)x′ + a2(t)x = 0
y t0 tal que u1(t0) 6= 0. Entonces la funcion
u2(t) = u1(t)
∫ t
t0
1
u1(s)2e−
∫ st0a1(τ) dτ
ds
es otra solucion de la ecuacion homogenea linealmente independiente de u1.
Aunque este resultado se puede obtener mas rapidamente mediante la formula de Abel, lo deduciremosaplicando una vez mas el metodo de variacion de constantes. Esto es, buscamos una segunda solucionde la ecuacion homogenea de la forma x(t) = c(t)u1(t), de modo que
x = cu1
x′ = c′u1 + cu′1x′′ = c′′u1 + 2c′u′1 + cu′′1.
Sustituyendo x, x′ y x′′ en la ecuacion homogenea se obtiene una ecuacion diferencial para c(t):
c′′u1 + c′(2u′1 + a1(t)u1) = 0
o bien
c′′(t) = c′(t)
(−2u′1(t)
u1(t)− a1(t)
).
Integrando esta ecuacion se obtiene
c′(t) = c′(t0)u1(t0)2
u1(t)2e−
∫ tt0a1(τ)dτ
y por sencillez tomaremos c′(t0)u1(t0)2 = 1, ya que todas las demas soluciones para c′ son multiplosde esta. Finalmente una segunda integracion conduce a
c(t) =
∫ t
t0
1
u1(s)2e−
∫ st0a1(τ)dτ
ds+ c(t0),
donde se puede tomar c(t0) = 0, ya que c(t0) simplemente suma a la solucion un multiplo de u1.Se obtiene ası la formula para u2 que aparece en el teorema. Notese que la integral que da c(t) enprincipio esta definida unicamente en un entorno de t0 en el que u1(t) no se anule, pero debido a launicidad, la solucion u2(t) = c(t)u1(t) esta bien definida en todo el intervalo de definicion de u1.
Para comprobar que u2 es linealmente independiente de u1 basta con calcular el wronskiano:
W (t) = u1u′2 − u′1u2
= u1(c′u1 + cu′1)− u′1cu1
= c′u21
= e−
∫ tt0a1(τ)dτ 6= 0.
Ejemplo 3.2 Aplicando este resultado a la ecuacion
x′′ + x = 0
con u1(t) = cos t se obtiene como segunda solucion linealmente independiente
u2(t) = cos t
∫1
cos2 tdt = cos t tan t = sen t.

32 CAPITULO 3. ECUACIONES LINEALES
3.2.9. Soluciones de la ecuacion no homogenea
Teorema 3.12 La diferencia de dos soluciones de la ecuacion completa L(x) = b(t) es una solucionde la ecuacion reducida L(x) = 0.
Si L(v1) = b(t), L(v2) = b(t) y u = v1 − v2, entonces
L(u) = L(v1 − v2) = L(v1)− L(v2) = b(t)− b(t) = 0.
Teorema 3.13 La suma de una solucion de la ecuacion completa L(x) = b(t) y una solucion de laecuacion reducida L(x) = 0 es una solucion de la ecuacion completa.
Si L(v) = b(t) y L(u) = 0 entonces
L(v + u) = L(v) + L(u) = b(t) + 0 = b(t).
Teorema 3.14 Las solucion general de la ecuacion completa L(x) = b(t) es
w = v + c1u1 + c2u2
donde v es una solucion de la ecuacion completa, u1 y u2 son soluciones linealmente independientesde la ecuacion reducida L(x) = 0, y c1 y c2 son constantes arbitrarias.
Ejemplo 3.3 La ecuacionx′′ − x = 1
admite como solucion particular la solucion constante v(t) = −1, y la ecuacion reducida
x′′ − x = 0
admite como soluciones linealmente independientes las funciones u1(t) = et y u2(t) = e−t (o equiva-lentemente u1(t) = cosh t y u2(t) = senh t). Por tanto la solucion general de la ecuacion completax′′ − x = 1 es
w(t) = c1et + c2e
−t − 1 (o equivalentemente w(t) = c1 cosh t+ c2 senh t− 1).
Teorema 3.15 (Principio de superposicion) Si v1 es una solucion de la ecuacion no homogeneaL(x) = b1(t) y si v2 es una solucion de la ecuacion no homogenea L(x) = b2(t) entonces v = v1 + v2
es una solucion de la ecuacion no homogenea L(x) = b1(t) + b2(t).
L(v) = L(v1 + v2) = L(v1) + L(v2) = b1(t) + b2(t).
Ejemplo 3.4 La ecuacionx′′ − x = 1
admite como solucion v1(t) = −1, y la ecuacion
x′′ − x = 2et
admite como solucion v2(t) = tet. Por tanto la ecuacion
x′′ − x = 1 + 2et
admite como solucion v(t) = v1(t) + v2(t) = −1 + tet.

3.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 33
3.2.10. Formula de variacion de constantes
Teorema 3.16 Sean u1, u2 soluciones linealmente independientes de la ecuacion homogenea
x′′ + a1(t)x′ + a2(t)x = 0
y sea W (t) su wronskiano. Entonces
v(t) = u2(t)
∫ t u1(s)b(s)
W (s)ds− u1(t)
∫ t u2(s)b(s)
W (s)ds
es una solucion de la ecuacionx′′ + a1(t)x′ + a2(t)x = b(t).
En particular si 0 esta en I la solucion que cumple v(0) = 0, v′(0) = 0 esta dada por
v(t) =
∫ t
0
G(t, s)b(s) ds
donde G(t, s) es la funcion de Green definida por
G(t, s) =u1(s)u2(t)− u1(t)u2(s)
W (s).
En este caso el metodo de variacion de constantes consiste en buscar soluciones de la ecuacioncompleta de la forma x(t) = c1(t)u1(t) + c2(t)u2(t), con lo que hay dos funciones c1(t) y c2(t) adeterminar por una unica condicion, y por tanto se puede imponer a estas funciones una condicionadicional (cuya compatibilidad debera comprobarse). Derivando
x = c1u1 + c2u2
se obtienex′ = c′1u1 + c1u
′1 + c′2u2 + c2u
′2.
Imponemos como primera condicion para determinar c1 y c2
c′1u1 + c′2u2 = 0
con lo que la expresion de las derivadas se reduce a
x′ = c1u′1 + c2u
′2
x′′ = c1u′′1 + c′1u
′1 + c2u
′′2 + c′2u
′2.
Sustituyendo x, x′ y x′′ en la ecuacion completa se obtiene la segunda condicion para determinar c1
y c2
c′1u′1 + c′2u
′2 = b(t).
Ambas condiciones constituyen un sistema de ecuaciones lineales para c′1 y c′2
c′1u1 + c′2u2 = 0
c′1u′1 + c′2u
′2 = b(t)
que tiene solucion unica, ya que u1 y u2 son linealmente independientes y por tanto su wronskianono se anula:
c′1(t) = −u2(t)b(t)
W (t), c′2(t) =
u1(t)b(t)
W (t).
Integrando estas expresiones se obtiene inmediatamente
c1(t) = −∫ t u2(s)b(s)
W (s)ds, c2(t) =
∫ t u1(s)b(s)
W (s)ds.

34 CAPITULO 3. ECUACIONES LINEALES
Ejemplo 3.5 Ya se ha visto que la ecuacion reducida de
x′′ − x = t2et
admite como soluciones linealmente independientes u1(t) = et y u2(t) = e−t, cuyo wronskiano esW (t) = −2. Aplicando la formula de variacion de constantes se obtiene la solucion particular de laecuacion completa
v(t) = e−t∫ett2et
(−2)dt− et
∫e−tt2et
(−2)dt
= −e−t
2
∫e2tt2dt+
et
2
∫t2dt
= et(t3
6− t2
4+t
4− 1
8
).
3.3. Ecuaciones con coeficientes constantes
En esta seccion se estudia la ecuacion diferencial lineal de segundo orden
x′′ + a1x′ + a2x = b(t)
en la que a1 y a2 son constantes.
3.3.1. Soluciones de la ecuacion homogenea
El operador lineal correspondiente es
L =d2
dt2+ a1
d
dt+ a2.
Aplicando este operador lineal a la funcion eλt se obtiene
L(eλt) = (λ2 + a1λ+ a2)eλt.
Se denomina polinomio caracterıstico de este operador L al polinomio
p(λ) = λ2 + a1λ+ a2,
de modo que se puede escribirL(eλt) = p(λ)eλt.
La busqueda de soluciones de la ecuacion lineal con coeficientes constantes se reduce al calculo delas raıces del polinomio caracterıstico, ya que si λ1 es una raız, es decir, si p(λ1) = 0, entonces
L(eλ1t) = p(λ1)eλ1t = 0
y la funcion u1(t) = eλ1t es una solucion de la ecuacion diferencial. Hay dos posibilidades:
Si el polinomio caracterıstico p(λ) tiene dos raıces distintas λ1 y λ2, entonces las funcionesu1(t) = eλ1t y u2(t) = eλ2t son dos soluciones linealmente independientes de la ecuacion, y lasolucion general se puede escribir
u(t) = c1eλ1t + c2e
λ2t.

3.3. ECUACIONES CON COEFICIENTES CONSTANTES 35
Si el polinomio caracterıstico p(λ) tiene una unica raız λ1 doble, solamente hay una solucionexponencial u1(t) = eλ1t linealmente independiente, pero se puede obtener una segunda solucionderivando la ecuacion L(eλt) = p(λ)eλt con respecto a λ:
∂
∂λL(eλt) = L
(∂
∂λeλt)
= L(teλt) = p′(λ)eλt + p(λ)teλt.
Al ser λ1 raız doble se cumple p(λ1) = 0, p′(λ1) = 0, y
u2(t) = teλ1t
es una segunda solucion linealmente independiente de u1(t).
Teorema 3.17 Sea la ecuacion homogenea con coeficientes constantes
x′′ + a1x′ + a2x = 0
y sea p(λ) = λ2 + a1λ+ a2 su polinomio caracterıstico.
Si el polinomio caracterıstico tiene raıces distintas λ1 6= λ2, las funciones u1(t) = eλ1t y u2(t) =eλ2t son dos soluciones linealmente independientes de dicha ecuacion homogenea, cuya soluciongeneral es
u(t) = c1eλ1t + c2e
λ2t.
Si el polinomio caracterıstico tiene una raız doble λ1, las funciones u1(t) = eλ1t y u2(t) = teλ1t
son dos soluciones linealmente independientes de dicha ecuacion homogenea, cuya soluciongeneral es
u(t) = (c1 + c2t)eλ1t.
En el caso de que las constantes a1 y a2 sean reales y el polinomio caracterıstico tenga raıces noreales, estas raıces han de ser complejas conjugadas: λ1 = γ+ iω y λ2 = λ1 = γ− iω, y las solucionesde la ecuacion pueden escribirse en forma real mediante funciones trigonometricas:
u(t) = c1e(γ+iω)t + c2e
(γ−iω)t
= eγt [(c1 + c2) cos(ωt) + (ic1 − ic2) sen(ωt)]
= eγt [k1 cos(ωt) + k2 sen(ωt)] .
En otras palabras, se pueden tomar u1(t) = eγt cos(ωt) y u2(t) = eγt sen(ωt).
3.3.2. Estabilidad de las soluciones de la ecuacion homogenea real
Sea la ecuacion homogenea
x′′ + a1x′ + a2x = 0
con a1 y a2 reales, y sean λ1, λ2 las raıces del polinomio caracterıstico.
Si λ1 y λ2 son reales y distintas, la soluciones son u(t) = c1eλ1t + c2e
λ2t. Si ambas raıces sonnegativas, todas las soluciones tienden a cero cuando t → ∞. Si una raız es cero y la otranegativa, todas las soluciones estan acotadas para t ≥ 0, pero no todas tienden a cero. Sialguna raız es positiva, entonces existen soluciones que no estan acotadas para t ≥ 0.

36 CAPITULO 3. ECUACIONES LINEALES
Si λ1 es raız doble, las soluciones son u(t) = (c1 +c2t)eλ1t. Si λ1 es negativa, todas las soluciones
tienden a cero cuando t→∞. Si λ1 ≥ 0, hay soluciones que no estan acotadas para t ≥ 0.
Si las raıces γ± iω son complejas conjugadas, las soluciones son u(t) = eγt(c1 cosωt+c2 senωt).Si γ es negativa, todas las soluciones tienden a cero cuando t→∞. Si γ es positiva, todas lassoluciones no nulas no estan acotadas para t ≥ 0. Si γ = 0, las soluciones son periodicas conperiodo 2π/ω, y por tanto acotadas para todo t.
O con la terminologıa de estabilidad:
Teorema 3.18 La condicion necesaria y suficiente para que todas las soluciones tiendan a cerocuando t→∞ es que todas las raıces del polinomio caracterıstico tengan parte real negativa. En estecaso la solucion nula es asintoticamente estable. Si alguna raız tiene la parte real positiva o si ceroes una raız doble, la solucion nula es inestable. En los casos restantes, la solucion nula es debilmenteestable.
3.3.3. Metodo de coeficientes indeterminados
Mediante la formula de variacion de constantes se puede demostrar el siguiente resultado:
Teorema 3.19 Si f(t) es un polinomio de grado d, la ecuacion
x′′ + a1x′ + a2x = f(t)eµt
tiene una solucion de la forma
v(t) = tmr(t)eµt
donde m es la multiplicidad de µ como raız caracterıstica y r(t) es un polinomio de grado d. (Si µno es raız del polinomio caracterıstico se sobrentiende que m = 0.)
Ejemplo 3.6 En la ecuacion
x′′ − x = t2et
se tiene que d = 2 y m = 1, de forma que existe una solucion de la forma
v(t) = (at3 + bt2 + ct)et.
Sustituyendo en la ecuacion e igualando coeficientes se obtiene a = 1/6, b = −1/4, c = 1/4, con loque
v(t) = et(t3
6− t2
4+t
4
).
Notese que esta solucion particular se diferencia de la obtenida anteriormente mediante la formulade variacion de constantes en la solucion de la ecuacion homogenea −et/8.
Aplicando el principio de superposicion lineal se obtiene la siguiente generalizacion:
Teorema 3.20 Si fk(t) es un polinomio de grado dk y µk es una raız caracterıstica de multiplicidadmk, entonces la ecuacion
x′′ + a1x′ + a2x =
N∑k=1
fk(t)eµkt

3.3. ECUACIONES CON COEFICIENTES CONSTANTES 37
tiene una solucion de la forma
v(t) =N∑k=1
tmkrk(t)eµkt
donde rk(t) es un polinomio de grado dk.
Este teorema incluye los casos en los que el segundo miembro de la ecuacion es de la formaf(t)eγt cosωt o f(t)eγt senωt. Sin embargo, si todos los coeficientes son reales hay un metodo maseficaz para encontrar una solucion particular.
Teorema 3.21 (Metodo de la amplitud compleja) Si a1, a2 y los coeficientes del polinomiof(t) son reales, y si v es una funcion (compleja) tal que L(v) = f(t)eγ+iωt, entonces
L(v1) = f(t)eγt cosωt
L(v2) = f(t)eγt senωt
donde v1 = Re(v) y v2 = Im(v).
Si a1 y a2 son reales, entonces L(v1 + iv2) = L(v1) + iL(v2) con L(v1) y L(v2) reales. Como ademastodos los coeficientes de f(t) son reales, igualando las partes reales e imaginarias de
L(v) = f(t)eγt+iωt
= f(t)eγt cosωt+ if(t)eγt senωt
se obtiene
L(v1) = f(t)eγt cosωt
L(v2) = f(t)eγt senωt.
Ejemplo 3.7 Sea la ecuacion
x′′ + 4x = sen 2t.
El polinomio caracterıstico de la ecuacion reducida x′′ + 4x = 0 es
p(λ) = λ2 + 4 = (λ− 2i)(λ+ 2i)
de donde se sigue que
u1(t) = cos 2t, u2(t) = sen 2t
son dos soluciones reales linealmente independientes de dicha ecuacion reducida. Para encontrar unasolucion particular de la ecuacion completa consideramos en su lugar
x′′ + 4x = e2it.
De acuerdo con el metodo de coeficientes indeterminados, esta ecuacion admite una solucion de laforma
v(t) = cte2it.
Sustituyendo v(t) y v′′(t) en la ecuacion se obtiene
ce2it(4i− 4t) + 4cte2it = e2it

38 CAPITULO 3. ECUACIONES LINEALES
de donde c = −i/4 y
v(t) = − i4te2it
=t
4sen 2t− i t
4cos 2t.
Por tanto la solucion general de la ecuacion de partida
x′′ + 4x = sen 2t
es
w(t) = Im[v(t)] + c1u1(t) + c2u2(t)
= − t4
cos 2t+ c1 cos 2t+ c2 sen 2t.
3.4. Osciladores
En esta seccion estudiamos la ecuacion
x′′ + a1x′ + a2x = b(t)
con a1 ≥ 0, a2 > 0 y b(t) real, continua y periodica.
3.4.1. Oscilador mecanico
La segunda ley de Newton para el movimiento de una partıcula de masa m sometida a una fuerzaarmonica de constante k, a una friccion de constante µ, y a una fuerza externa F (t) es
md2x
dt2= −kx− µdx
dt+ F (t).
Con las definiciones usuales
ω0 =√k/m > 0, γ = µ/(2m) ≥ 0, b(t) = F (t)/m
la ecuacion del movimiento es:x′′ + 2γx′ + ω2
0x = b(t).
3.4.2. Oscilador electrico
Sumando las diferencial de potencial en un circuito LRC en serie con un condensador de capacidadC y carga Q, una resistencia R, una induccion L y una fuerza electromotriz ε(t) se obtiene la ecuacion
Ld2Q
dt2+R
dQ
dt+
1
CQ = ε(t).
Con las definiciones
x = Q, ω0 = 1/√LC, γ = R/(2L), b(t) = ε(t)/L
la ecuacion del movimiento es de nuevo
x′′ + 2γx′ + ω20x = b(t).

3.4. OSCILADORES 39
3.4.3. Oscilador armonico simple: amplitud y fase
El polinomio caracterıstico de la ecuacion
x′′ + ω20x = 0, ω0 > 0
es
p(λ) = λ2 + ω20 = (λ− iω0)(λ+ iω0).
Por tanto la solucion general escrita en forma real es
u(t) = c1 cos(ω0t) + c2 sen(ω0t)
de forma que c1 = u(0) y c2 = u′(0)/ω0.
Todas las soluciones no triviales del oscilador armonico simple son periodicas con periodo
T0 =2π
ω0
.
El inverso del periodo se denomina frecuencia,
ν0 =ω0
2π
y la constante ω0 se denomina frecuencia angular.
En Fısica es frecuente expresar esta solucion general de un modo distinto mediante la siguientetransformacion:
u(t) = c1 cos(ω0t) + c2 sen(ω0t)
=√c2
1 + c22
[c1√c2
1 + c22
cos(ω0t) +c2√c2
1 + c22
sen(ω0t)
].
Por tanto la solucion general tambien se puede escribir en la forma
u(t) = A sen(ω0t+ φ)
donde
A =√c2
1 + c22, senφ =
c1√c2
1 + c22
, cosφ =c2√c2
1 + c22
,
de manera que A ≥ 0 y φ se puede elegir en el intervalo 0 ≤ φ < 2π. Recıprocamente
c1 = A senφ, c2 = A cosφ.
El coeficiente A se denomina amplitud, ya que el maximo de la solucion u es A y el mınimo es−A. El coeficiente φ se denomina fase, desfase o desfasaje, y mide el retraso de la oscilacion respectode la funcion u0(t) = A sen(ω0t), ya que la grafica de la funcion u se obtiene trasladando la graficade u0 en φ/ω0 unidades hacia la izquierda.

40 CAPITULO 3. ECUACIONES LINEALES
Π 2 Π
t
-0.5
0.5
1
x
-1 -0.5 0.5 1x
-1
-0.5
0.5
1
x
Figura 3.1: Oscilador armonico simple con amplitud A = 1, frecuencia angular ω = 1 y fase φ = π/4,es decir, u(t) = sen(t+ π/4).
3.4.4. Oscilador amortiguado
Se conoce como oscilador amortiguado al descrito por la ecuacion
x′′ + 2γx′ + ω20x = 0
con ω0 > 0 y γ > 0. Las raıces del polinomio caracterıstico
p(λ) = λ2 + 2γλ+ ω20
son
λ1,2 =
−γ ±
√γ2 − ω2
0 < 0 si γ > ω0
−γ (doble) si γ = ω0
−γ ± i√ω2
0 − γ2 si γ < ω0.
En los tres casos las raıces caracterısticas λ1 y λ2 tienen parte real negativa. Por tanto todas lassoluciones tienden a cero para t→∞ y la unica solucion periodica es la trivial u(t) ≡ 0.
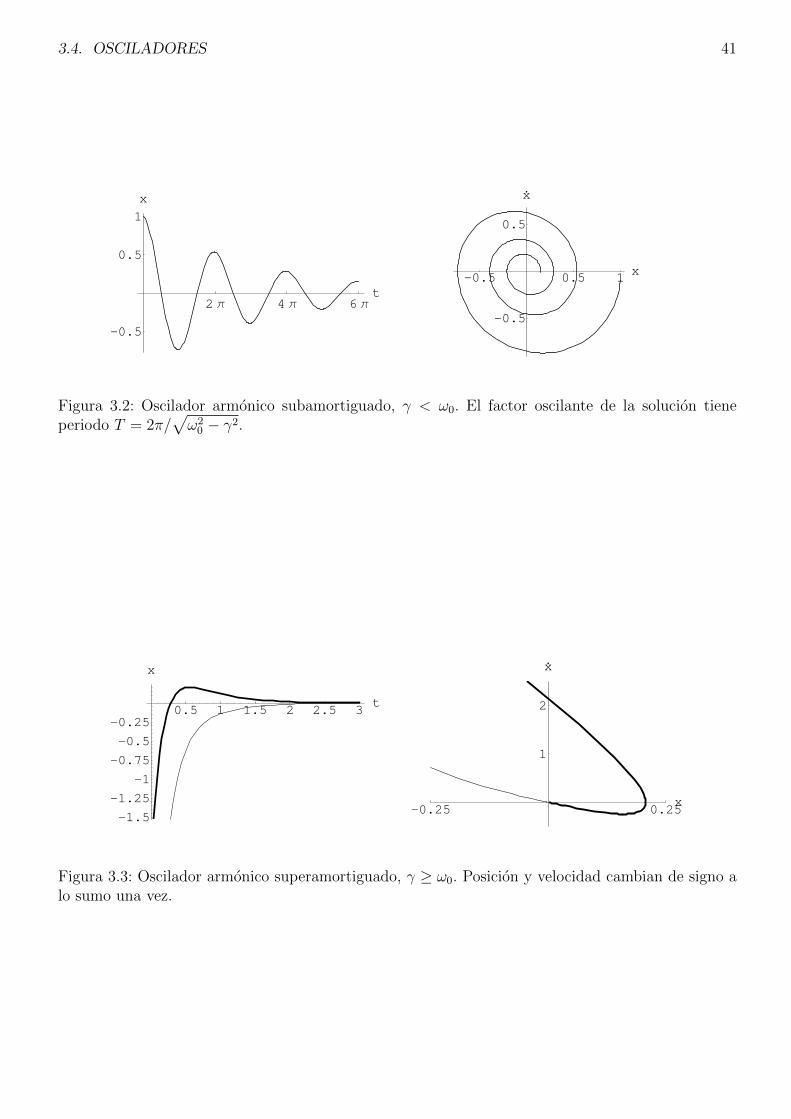
Si γ < ω0 el movimiento es oscilatorio con amplitud decreciente:
u(t) = c1e−γt cos
(t√ω2
0 − γ2
)+ c2e
−γt sen
(t√ω2
0 − γ2
),
que tambien se puede escribir en la forma
u(t) = Ae−γt sen
(t√ω2
0 − γ2 + φ
).
El factor oscilante de la solucion tiene periodo T = 2π/√ω2
0 − γ2.
Si γ ≥ ω0 las soluciones son
u(t) = c1e(−γ+√γ2−ω2
0)t + c2e(−γ−√γ2−ω2
0)t si γ > ω0
u(t) = (c1 + c2t)e−γt si γ = ω0
y son monotonas para valores grandes de t. En efecto, si una solucion no nula es suma de dosexponenciales reales, entonces c1e
λ1t + c2eλ2t = 0 si y solo si c1 y c2 tienen signos opuestos,
en cuyo caso la unica solucion es t = ln(−c2/c1)/(λ1 − λ2), mientras que si −γ es raız doble,(c1 + c2t)e
−γt = 0 o no se anula (si c2 = 0 y c1 6= 0) o se anula a lo sumo una vez en t = −c1/c2.
En resumen, si γ ≥ ω0 la solucion se anula a lo sumo una vez (y la velocidad cambia de signoa lo sumo una vez).
3.4. OSCILADORES 41
2 Π 4 Π 6 Π
t
-0.5
0.5
1
x
-0.5 0.5 1x
-0.5
0.5
x
Figura 3.2: Oscilador armonico subamortiguado, γ < ω0. El factor oscilante de la solucion tieneperiodo T = 2π/
√ω2
0 − γ2.
0.5 1 1.5 2 2.5 3t
-1.5
-1.25
-1
-0.75
-0.5
-0.25
x
-0.25 0.25x
1
2
x
Figura 3.3: Oscilador armonico superamortiguado, γ ≥ ω0. Posicion y velocidad cambian de signo alo sumo una vez.

42 CAPITULO 3. ECUACIONES LINEALES
3.4.5. Oscilador amortiguado con fuerza externa armonica
Se puede demostrar que un oscilador amortiguado con fuera externa periodica tiene una unicasolucion periodica. Ademas, la diferencia entre esta solucion periodica y cualquier otra es una solucionde la ecuacion homogenea, y por tanto tiendo a cero cuando t → ∞. La solucion periodica seconoce tambien como solucion estacionaria, y la diferencia entre cualquier otra solucion y ella comotransitorio. En algunas aplicaciones la aproximacion a la solucion periodica es tan rapida que no hayque tener en cuenta ninguna otra solucion, es decir, que las condiciones iniciales son irrelevantes.
La solucion periodica depende de modo complicado de la fuerza externa. En el caso de una fuerzaexterna armonica b(t) = B sen(ωt) con B constante, la ecuacion del movimiento es
x′′ + 2γx′ + ω20x = B sen(ωt)
y el metodo de la amplitud compleja proporciona la solucion explıcita. Sustituyendo en la ecuacion
x′′ + 2γx′ + ω20x = Beiωt
una funcion de la forma
v(t) = ceiωt
se obtiene
c =B
ω20 − ω2 + 2iγω
.
Por tanto una solucion particular de la ecuacion de partida es v(t) = Im(ceiωt), es decir,
v(t) =B√
4γ2ω2 + (ω20 − ω2)2
sen(ωt+ φ)
donde π < φ < 2π,
φ =3π
2si ω = ω0, tanφ =
2γω
ω2 − ω20
si ω 6= ω0.
El factor
F (ω) =1√
4γ2ω2 + (ω20 − ω2)2
se denomina funcion de respuesta, y sus graficas para distintos valores de γ se llaman curvas derespuesta. La solucion general en el caso subamortiguado γ < ω0 es
w(t) = c1e−γt cos
(t√ω2
0 − γ2
)+ c2e
−γt sen
(t√ω2
0 − γ2
)+ F (ω)B sen(ωt+ φ).
Como hemos dicho en la seccion anterior, si la aproximacion a la solucion periodica es muy rapida,en la practica no hay que tener en cuenta ninguna otra solucion. Es decir, las condiciones inicialesque fijan c1 y c2 son irrelevantes.
Perturbaciones periodicas mas generales se estudian utilizando series de Fourier y el principio desuperposicion.

3.4. OSCILADORES 43
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
Figura 3.4: Curvas de respuesta para un oscilador con ω0 = 1 y γ = 2, 1/√
2, 1/2 y 1/4.
3.4.6. Oscilador no amortiguado con fuerza externa periodica
Ya se ha visto que las soluciones del oscilador no amortiguado
x′′ + ω20x = 0
son periodicas con periodo T0 = 2π/ω0:
u(t) = c1 cos(ω0t) + c2 sen(ω0t).
La solucion general de la ecuacion no homogenea
x′′ + ω20x = b(t)
se calcula facilmente mediante la funcion de Green:
u(t) = u(0) cos(ω0t) +u′(0)
ω0
sen(ω0t) +1
ω0
∫ t
0
b(s) sen[ω0(t− s)] ds.
La discusion general de las soluciones periodicas de esta ecuacion cuando b(t) es periodica con periodoT se complica por la periodicidad de las soluciones de la ecuacion reducida. Se puede demostrar losiguiente:
Si T/T0 es irracional, existe una unica solucion periodica, que tiene periodo T .
Si T/T0 = m/n es racional (irreducible) pero no es entero, existe una unica solucion con periodoT y todas las soluciones tienen periodo nT .
Si T = nT0 o toda solucion tiene periodo T o ninguna solucion es periodica, segun que lasintegrales ∫ T
0
b(t) sen(ω0t) dt
∫ T
0
b(t) cos(ω0t) dt
se anulen o no simultaneamente.
Estudiaremos la solucion explıcita en el caso de una fuerza externa armonica
x′′ + ω20x = B sen(ωt).
44 CAPITULO 3. ECUACIONES LINEALES
25 50 75 100 125 150t
-10
-5
5
10
x
25 50 75 100 125 150t
-75
-50
-25
25
50
75
x
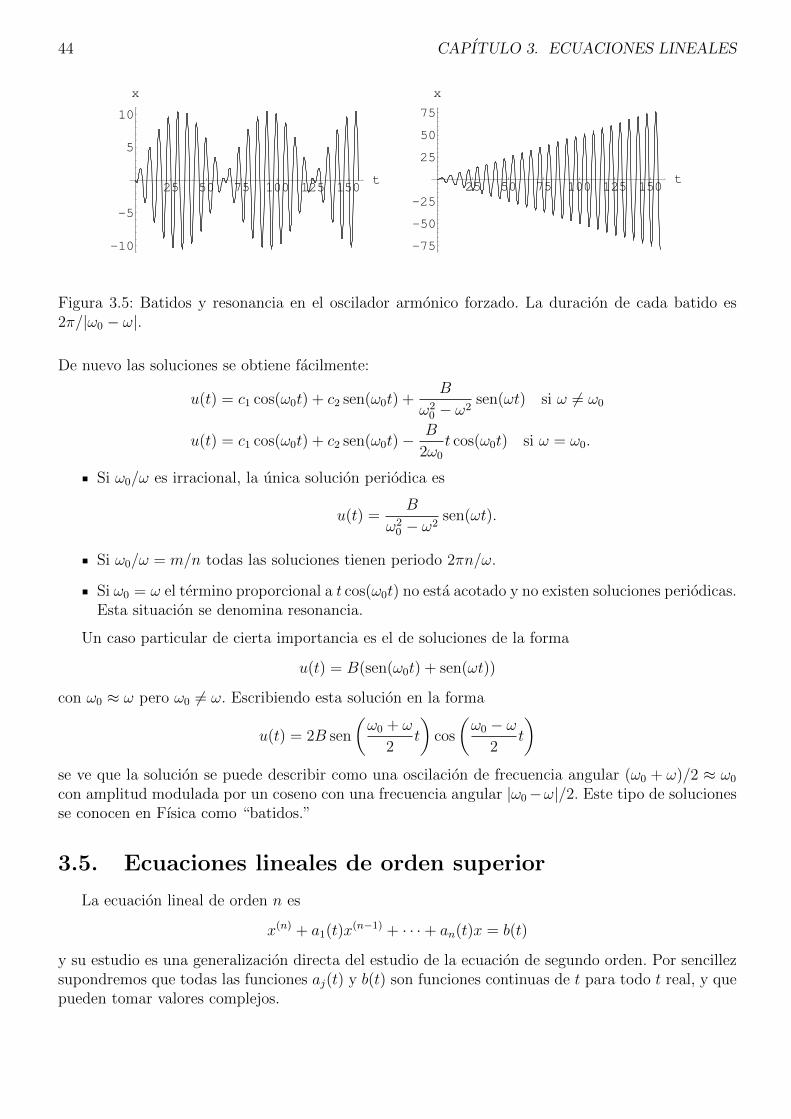
Figura 3.5: Batidos y resonancia en el oscilador armonico forzado. La duracion de cada batido es2π/|ω0 − ω|.
De nuevo las soluciones se obtiene facilmente:
u(t) = c1 cos(ω0t) + c2 sen(ω0t) +B
ω20 − ω2
sen(ωt) si ω 6= ω0
u(t) = c1 cos(ω0t) + c2 sen(ω0t)−B
2ω0
t cos(ω0t) si ω = ω0.
Si ω0/ω es irracional, la unica solucion periodica es
u(t) =B
ω20 − ω2
sen(ωt).
Si ω0/ω = m/n todas las soluciones tienen periodo 2πn/ω.
Si ω0 = ω el termino proporcional a t cos(ω0t) no esta acotado y no existen soluciones periodicas.Esta situacion se denomina resonancia.
Un caso particular de cierta importancia es el de soluciones de la forma
u(t) = B(sen(ω0t) + sen(ωt))
con ω0 ≈ ω pero ω0 6= ω. Escribiendo esta solucion en la forma
u(t) = 2B sen
(ω0 + ω
2t
)cos
(ω0 − ω
2t
)se ve que la solucion se puede describir como una oscilacion de frecuencia angular (ω0 + ω)/2 ≈ ω0
con amplitud modulada por un coseno con una frecuencia angular |ω0−ω|/2. Este tipo de solucionesse conocen en Fısica como “batidos.”
3.5. Ecuaciones lineales de orden superior
La ecuacion lineal de orden n es
x(n) + a1(t)x(n−1) + · · ·+ an(t)x = b(t)
y su estudio es una generalizacion directa del estudio de la ecuacion de segundo orden. Por sencillezsupondremos que todas las funciones aj(t) y b(t) son funciones continuas de t para todo t real, y quepueden tomar valores complejos.

3.5. ECUACIONES LINEALES DE ORDEN SUPERIOR 45
Teorema 3.22 Sean a1(t), . . . , an(t) y b(t) funciones complejas continuas definidas para todo t real.Dado un numero real t0 y n−1 numeros complejos x0, . . . , xn−1 existe una unica solucion maximal wde la ecuacion diferencial x(n) + a1(t)x(n−1) + · · ·+ an(t)x = b(t) que cumple las condiciones inicialesw(t0) = x0, w
′(t0) = x1, . . . , w(n−1)(t0) = xn−1. El intervalo de definicion de w es toda la recta real.
El operador diferencial lineal correspondiente es
L =dn
dtn+ a1(t)
dn−1
dtn−1+ · · ·+ an(t).
Con esta notacion, la ecuacion lineal completa se escribe de nuevo L(x) = b(t) y la ecuacion linealreducida es L(x) = 0.
El wronskiano de n soluciones u1, . . . , un de la ecuacion homogenea es ahora el determinante
W (t) =
∣∣∣∣∣∣∣∣∣u1(t) u2(t) · · · un(t)u′1(t) u′2(t) · · · u′n(t)
......
. . ....
u(n−1)1 (t) u
(n−1)2 (t) · · · u
(n−1)n (t)
∣∣∣∣∣∣∣∣∣ .Derivando este determinante e integrando la ecuacion diferencial resultante se obtiene de nuevo laformula de Abel
W (t) = W (t0)e−
∫ tt0a1(s)ds
.
Teorema 3.23 El wronskiano de n soluciones de la ecuacion homogenea L(x) = 0 o es nulo paratodo t o no lo es para ningun t. En el primer caso las soluciones son linealmente dependientes; en elsegundo caso las soluciones son linealmente independientes.
Teorema 3.24 Las n soluciones de la ecuacion homogenea L(x) = 0 que cumplen las condicionesiniciales
u(j)k (0) =
{1 si j = k − 1
0 si j 6= k − 1
donde k = 1, . . . , n y j = 0, . . . , n− 1 son linealmente independientes, ya que W (0) = det I = 1.
Teorema 3.25 Sean u1, . . . , un n soluciones de la ecuacion homogenea L(x) = 0 linealmente inde-pendientes. Toda solucion de la ecuacion homogenea es combinacion lineal de u1, . . . , un.
En otras palabras, la solucion general de la ecuacion homogenea es
u(t) = c1u1 + · · ·+ cnun
donde u1, . . . , un son n soluciones linealmente independientes.
Teorema 3.26 La solucion general de la ecuacion completa L(x) = b(t) esta dada por
w = v + c1u1 + · · ·+ cnun
donde v es una solucion de la ecuacion completa y u1, . . . , un son n soluciones linealmente indepen-dientes de la ecuacion reducida L(x) = 0.

46 CAPITULO 3. ECUACIONES LINEALES
Para encontrar una solucion v de la ecuacion completa L(x) = b(t) conocidas n soluciones linealmenteindependientes u1, . . . , un de la ecuacion reducida L(x) = 0 de nuevo se puede utilizar el metodo devariacion de constantes, que en este caso se expresa de forma mas concisa con la notacion matricialdel capıtulo siguiente.
La estudio de las ecuaciones con coeficientes constantes tambien es analogo. La accion del operadordiferencial L sobre una funcion exponencial eλt es
L(eλt) = p(λ)eλt
donde el polinomio caracterıstico es ahora
p(λ) = λn + a1λn−1 + · · ·+ an.
Su factorizacion
p(λ) = (λ− λ1)n1 · · · (λ− λs)ns
junto con sucesivas derivaciones con respecto a λ en el caso de raıces multiples conduce al siguienteresultado.
Teorema 3.27 Sea la ecuacion homogenea con coeficientes constantes
x(n) + a1x(n−1) + · · ·+ anx = 0
y sea p(λ) = λn + a1λn−1 + · · · + an = (λ − λ1)n1 · · · (λ − λs)ns su polinomio caracterıstico. Las n
funciones
tjeλkt j = 0, 1, . . . , nk − 1 k = 1, . . . , s
son soluciones linealmente independientes de dicha ecuacion.
La estabilidad de la solucion nula de la ecuacion homogenea se discute tambien de forma analoga alcaso de segundo orden.
Teorema 3.28 La condicion necesaria y suficiente para que todas las soluciones de la ecuacionhomogenea x(n) + a1x
(n−1) + · · · + anx = 0 tiendan a cero cuando t → ∞ es que todas las raıcesdel polinomio caracterıstico tengan parte real negativa. Si alguna raız tiene parte real positiva, o siexiste una raız multiple con parte real nula, algunas soluciones son no acotadas para t ≥ 0. En todoslos demas casos todas las soluciones estan acotadas para t ≥ 0, pero no todas tienden a cero cuandot→∞.
Tambien se generalizan inmediatamente el metodo de coeficientes indeterminados y el metodo de laamplitud compleja.
Teorema 3.29 Si f(t) es un polinomio de grado d, la ecuacion
x(n) + a1x(n−1) + · · ·+ anx = f(t)eµt
tiene una solucion de la forma
v(t) = tmr(t)eµt
donde m es la multiplicidad de µ como raız caracterıstica y r(t) es un polinomio de grado d.

3.5. ECUACIONES LINEALES DE ORDEN SUPERIOR 47
Ejemplo 3.8 Sea la ecuacionx′′′ + x′ = cos t.
El polinomio caracterıstico es p(λ) = λ(λ−i)(λ+i), por lo que las soluciones de la ecuacion homogeneaexpresadas en forma real son
u(t) = c1 + c2 cos t+ c3 sen t.
Para hallar una solucion de la ecuacion completa de nuevo es mas conveniente reemplazar dichaecuacion completa por
x′′′ + x′ = eit
de modo que la parte real de una solucion de esta ecuacion sera solucion de la ecuacion original. Yaque i es raız caracterıstica simple, existe una solucion de la forma
v(t) = cteit.
Por sustitucion se obtiene c = −1/2 y en consecuencia la solucion general de la ecuacion de partidaes
w(t) = c1 + c2 cos t+ c3 sen t− t
2cos t.

48 CAPITULO 3. ECUACIONES LINEALES
Capıtulo 4
SISTEMAS LINEALES
4.1. Notacion matricial
En este capıtulo es conveniente utilizar la notacion matricial. Ademas, para poder utilizar su-perındices, tambien se denotara la derivada mediante un punto:
u′(t) = u(t).
La derivada y la integral de una funcion vectorial u(t) = (u1(t), . . . , un(t)) se definen termino atermino:
u(t) =(u1(t), . . . , un(t)
),
∫ b
a
u(t)dt =
(∫ b
a
u1(t)dt, . . . ,
∫ b
a
un(t)dt
).
Tal como se hizo en Algebra Lineal, se denotara por u(t) el vector columna correspondiente:
u(t) =
u1(t)...
un(t)
.La derivada de una matriz
V (t) =
v11(t) · · · v1n(t)...
. . ....
vn1(t) · · · vnn(t)
se define mediante
V (t) =
v11(t) · · · v1n(t)...
. . ....
vn1(t) · · · vnn(t)
y se verifica la regla de Leibniz
d
dt[V (t)U(t)] = V (t)U(t) + V (t)U(t).
49

50 CAPITULO 4. SISTEMAS LINEALES
Como consecuencia, si la matriz V (t) ademas de derivable es invertible
d
dt
[V −1(t)
]= −V −1(t)V (t)V −1(t).
Finalmente, la derivada del determinante W (t) = detV (t) esta dada por
W (t) =
∣∣∣∣∣∣∣V11(t) · · · V1n(t)
.... . .
...
Vn1(t) · · · Vnn(t)
∣∣∣∣∣∣∣+ · · ·+
∣∣∣∣∣∣∣V11(t) · · · V1n(t)
.... . .
...
Vn1(t) · · · Vnn(t)
∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣V11(t) · · · V1n(t)
.... . .
...Vn1(t) · · · Vnn(t)
∣∣∣∣∣∣∣+ · · ·+
∣∣∣∣∣∣∣V11(t) · · · V1n(t)
.... . .
...
Vn1(t) · · · Vnn(t)
∣∣∣∣∣∣∣ .4.2. Sistemas lineales
Un sistema de n ecuaciones diferenciales lineales de primer orden es un sistema de la forma
x1 = a11(t)x1 + · · ·+ a1
n(t)xn + b1(t)
x2 = a21(t)x1 + · · ·+ a2
n(t)xn + b2(t)
...
xn = an1(t)x1 + · · ·+ ann(t)xn + bn(t).
Empleando la notacion matricial
x =
x1
...xn
, x =
x1
...xn
, A(t) =
a1
1(t) · · · a1n(t)
.... . .
...an1(t) · · · ann(t)
, b(t) =
b1(t)...
bn(t)
el sistema de ecuaciones diferenciales lineales de primer orden se escribe
x(t) = A(t)x+ b(t).
Por sencillez supondremos que todas las funciones aij(t) y bi(t) son funciones continuas de t paratodo t real, y que pueden tomar valores complejos.
Teorema 4.1 Sean A(t) una matriz n × n de funciones complejas continuas aij(t) definidas paratodo t real, y b(t) un vector de n funciones complejas continuas bi(t) definidas para todo t real. Dadoun numero real t0 y un vector de n numeros complejos η = (η1, . . . , ηn), existe una unica funcionvectorial u = (u1, . . . , un) definida para todo t real que es solucion del sistema
x = A(t)x+ b(t)
con la condicion inicial u(t0) = η, es decir
u1(t0) = η1, . . . , un(t0) = ηn.
4.3. SISTEMAS HOMOGENEOS 51
En el primer capıtulo se demostro que toda ecuacion diferencial lineal o sistema de ecuaciones dife-renciales lineales puede escribirse de esta forma. Ası, las ecuaciones estudiadas en el capıtulo anteriorson casos particulares de estos sistemas lineales. Con la notacion (x1, x2, . . . , xn) = (x, x′, . . . , x(n−1))la ecuacion lineal
x(n) + a1(t)x(n−1) + · · ·+ an(t)x = b(t)
es equivalente al sistema de ecuaciones linealesx1
x2
...xn−1
xn
=
0 1 0 · · · 00 0 1 · · · 0...
......
. . ....
0 0 0 · · · 1−an(t) −an−1(t) −an−2(t) · · · −a1(t)
x1
x2
...xn−1
xn
+
00...0b(t)
y se comprueba inmediatamente que las definiciones y teoremas dados en el estudio de las ecuacioneslineales son un caso particular de las correspondientes a sistemas de ecuaciones lineales (por ejemplo,la definicion de wronskiano o la formula de Liouville).
4.3. Sistemas homogeneos
Teorema 4.2 Toda combinacion lineal de soluciones del sistema homogeneo x = A(t)x es tambiensolucion de dicho sistema homogeneo.
Si u1 = A(t)u1, . . . , uk = A(t)uk y u = c1u1 + · · ·+ ckuk entonces
u = c1u1 + · · ·+ ckuk
= c1A(t)u1 + · · ·+ ckA(t)uk
= A(t)(c1u1 + · · ·+ ckuk)
= A(t)u.
Teorema 4.3 Si u es una solucion del sistema homogeneo x = A(t)x que para cierto t0 cumple lacondicion inicial u(t0) = (0, . . . , 0), entonces u(t) ≡ (0, . . . , 0).
Es consecuencia de la unicidad.
Teorema 4.4 Las n soluciones u1, . . . , un del sistema homogeneo x = A(t)x son linealmente depen-dientes si y solo si su wronskiano
W (t) = det[u1(t)| · · · |un(t)] =
∣∣∣∣∣∣∣u1
1(t) · · · u1n(t)
.... . .
...un1(t) · · · unn(t)
∣∣∣∣∣∣∣se anula para algun valor t0.
Teorema 4.5 (Formula de Liouville) El wronskiano W (t) de n soluciones u1, . . . , un de la ecua-cion homogenea x = A(t)x cumple
W (t) = W (t0)e∫ tt0
[trA(s)]ds.
Por tanto W (t) o es nulo para todo t o no se anula para ningun t. En el primer caso las solucionesson linealmente dependientes; en el segundo caso son linealmente independientes.

52 CAPITULO 4. SISTEMAS LINEALES
Derivando el wronskiano se obtiene directamente
W ′(t) = [a11(t) + · · ·+ ann(t)]W (t) = [trA(t)]W (t).
Integrando esta ecuacion diferencial lineal homogenea se obtiene la formula de Liouville, de donde sesigue inmediatamente el teorema.
Teorema 4.6 Las soluciones u1, . . . , un del sistema homogeneo x = A(t)x que cumplen las condi-ciones iniciales ui(0) = ei (donde ei es el i-esimo vector de la base canonica) son linealmente inde-pendientes, ya que W (0) = det I = 1. Cualquier otra solucion se puede escribir como combinacionlineal de u1, . . . , un.
Teorema 4.7 Sean u1, . . . , un soluciones linealmente independientes del sistema homogeneo x =A(t)x. Toda solucion de dicho sistema homogeneo es combinacion lineal de u1, . . . , un.
4.3.1. Matrices fundamentales
El teorema anterior establece que la solucion general del sistema homogeneo x = A(t)x es
u(t) = c1u1(t) + · · ·+ cnun(t)
donde u1, . . . , un son n soluciones (vectores columna) linealmente independientes del sistema y dondec1, . . . , cn son constantes arbitrarias. En muchos casos es conveniente escribir estas combinacioneslineales como producto de una matriz por un vector constante:
u(t) = c1u1(t) + · · ·+ cnun(t) = [u1(t)| · · · |un(t)]
c1...cn
= U(t)c.
Es mas, recordando la regla de multiplicacion de matrices por bloques
A(t)U(t) = A(t)[u1| · · · |un] = [A(t)u1| · · · |A(t)un]
se comprueba que la matriz U(t) satisface el sistema matricial
U(t) = A(t)U(t).
Con esta notacion, el wronskiano de las soluciones u1, . . . , un es
W (t) = detU(t).
Definicion 4.1 (Matrices fundamentales) Se llama matriz fundamental del sistema homogeneox = A(t)x a toda matriz U(t) = [u1(t)| · · · |un(t)] cuyas columnas sean n soluciones linealmenteindependientes de dicho sistema.
Teorema 4.8 Si U(t) es una matriz fundamental del sistema homogeneo x = A(t)x, cualquier so-lucion del sistema se puede expresar en la forma u(t) = U(t)c, donde c es un vector constante.
Definicion 4.2 (Matriz fundamental canonica) Se llama matriz fundamental canonica del sis-tema homogeneo x = A(t)x a la matriz fundamental U(t) = [u1(t)| · · · |un(t)] que cumple U(0) = I,es decir, a la matriz fundamental cuyas columnas son las soluciones de dicho sistema que cumplenlas condiciones iniciales ui(0) = ei, (i = 1, . . . , n).
Teorema 4.9 Si U(t) es la matriz fundamental canonica del sistema homogeneo x = A(t)x, lasolucion u del sistema que cumple la condicion inicial u(0) = η es u(t) = U(t)η.

4.4. SISTEMAS NO HOMOGENEOS 53
4.3.2. Ejemplo
Sea el sistema
x1 = −x1
x2 = (sen t)x1 − x2
que escrito en forma matricial es [x1
x2
]=
[−1 0
sen t −1
] [x1
x2
].
La solucion u1 que cumple la condicion inicial
u1(0) =
[10
]es u1(t) =
[e−t
e−t(1− cos t)
].
La solucion u2 que cumple la condicion inicial
u2(0) =
[01
]es u2(t) =
[0e−t
].
Por tanto la matriz fundamental canonica es
U(t) =
[e−t 0
e−t(1− cos t) e−t
]y la solucion u que cumple la condicion inicial
u(0) =
[η1
η2
]es u(t) =
[e−t 0
e−t(1− cos t) e−t
] [η1
η2
].
4.4. Sistemas no homogeneos
Teorema 4.10 Si U(t) es una matriz fundamental del sistema reducido x = A(t)x y v es unasolucion del sistema completo x = A(t)x+ b(t), entonces para todo vector constante c la funcion
w(t) = U(t)c+ v(t)
es una solucion del sistema completo. Recıprocamente, si w es una solucion del sistema completo,existe un unico vector constante c tal que w(t) = U(t)c+ v(t).
4.5. Formula de variacion de constantes
La formula de variacion de constantes se generaliza a sistemas lineales: si U(t) es una matrizfundamental del sistema homogeneo x = A(t)x, se busca un vector columna c(t) tal que el vectorcolumna v(t) = U(t)c(t) sea solucion del sistema no homogeneo x = A(t)x + b(t). El calculo es elmismo que en el caso de la ecuacion lineal con la salvedad de la no conmutatividad de los productosmatriciales:
Uc+ Uc = AUc+ b, Uc = b, c = U−1b,
y basta tomar
c(t) =
∫ t
U−1(s)b(s) ds+ C
donde C es un vector columna constante arbitrario.

54 CAPITULO 4. SISTEMAS LINEALES
Teorema 4.11 Sea U(t) una matriz fundamental del sistema homogeneo x = A(t)x. La soluciongeneral del sistema no homogeneo
x = A(t)x+ b(t)
es
w(t) = U(t)C + U(t)
∫ t
U−1(s)b(s)ds.
En particular, la solucion que cumple v(0) = (0, . . . , 0) esta dada por
v(t) =
∫ t
0
G(t, s)b(s)ds
donde G(t, s) es la funcion matricial de Green definida por
G(t, s) = U(t)U−1(s).
Si ademas U(t) es la matriz fundamental canonica, entonces la solucion de
x = A(t)x+ b(t)
que verifica w(0) = η es
w(t) = U(t)
[η +
∫ t
0
U−1(s)b(s)ds
]o equivalentemente
w(t) = U(t)η +
∫ t
0
G(t, s)b(s)ds.
4.5.1. Ejemplo
Sea el sistema
x1 = −x1
x2 = (sen t)x1 − x2 + t
que escrito en forma matricial es [x1
x2
]=
[−1 0
sen t −1
] [x1
x2
]+
[0t
].
La matriz fundamental canonica del sistema reducido es
U(t) =
[e−t 0
e−t(1− cos t) e−t
]con la que se calcula inmediatamente
U−1(s) =
[es 0
es(cos s− 1) es
].

4.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 55
Por tanto la solucion particular que cumple la condicion inicial v(0) = (0, 0) es
v(t) = U(t)
∫ t
0
U−1(s)b(s)ds
= U(t)
∫ t
0
[es 0
es(cos s− 1) es
] [0s
]ds
= U(t)
∫ t
0
[0ses
]ds
= U(t)
[0
et(t− 1) + 1
]=
[0
e−t + t− 1
].
4.6. Sistemas lineales con coeficientes constantes
4.6.1. Exponencial de una matriz
En la teorıa de sistemas de ecuaciones diferenciales lineales con coeficientes constantes es esencialel estudio de las familias de matrices de la forma etA, donde t es un parametro real. Aplicando elcriterio de Weierstrass se puede demostrar el siguiente teorema.
Teorema 4.12 La serie de matrices dependiente del parametro t
etA =∞∑k=0
tk
k!Ak
converge (en el sentido de que todos los elementos de la matriz son convergentes) absolutamente yuniformemente en conjuntos acotados, lo mismo que la serie que se obtiene derivando termino atermino la serie anterior con respecto a t.
Multiplicando las series correspondientes a esA y a etA y agrupando potencias se obtiene
e(s+t)A = esAetA.
En particular etA es siempre invertible y
(etA)−1 = e−tA.
Mediante reduccion a forma normal se demuestra que
det(etA) = et trA.
Derivando termino a termino la serie etA se obtiene
d
dt
(etA)
= AetA.
Si AB = BA entonces eAeB = eA+B. Si A y B no conmutan, en general eAeB 6= eA+B.
Si A diagonaliza,etA = PetDP−1.
donde P = [v1| · · · |vn] es la matriz de vectores propios y D = diag(λ1, . . . , λn).

56 CAPITULO 4. SISTEMAS LINEALES
4.6.2. Solucion general
Teorema 4.13 La matriz fundamental canonica del sistema lineal homogeneo con coeficientes cons-tantes
x = Ax
es
U(t) = etA,
y la solucion que cumple u(t0) = η es
u(t) = e(t−t0)Aη.
La solucion del sistema no homogeneo
x = Ax+ b(t)
que cumple la condicion inicial u(t0) = η es
u(t) = e(t−t0)Aη +
∫ t
t0
e(t−s)Ab(s) ds.
4.6.3. Calculo de la exponencial de una matriz
Existen varios metodos generales para calcular la exponencial de una matriz, y cada uno de ellospresenta ventajas e inconvenientes difıciles de juzgar a priori. Antes de estudiar uno de estos metodosgenerales se veran algunos casos particulares que aparecen en la practica.
Matrices nilpotentes
Si una matriz es nilpotente, es decir, si Ak 6= 0 pero Ak+1 = 0, entonces todas las potenciassuperiores se anulan, y la serie para la exponencial se reduce a un polinomio en A:
etA = I + tA+ · · ·+ tk
k!Ak, (Ak+1 = 0).
Ejemplo 4.1 Considerese el sistema correspondiente a la ecuacion x′′ = 0:
x1 = x2
x2 = 0
cuya matriz es
A =
[0 10 0
].
Como A2 = 0, la serie que da la matriz fundamental canonica termina en el segundo termino:
etA = I + tA =
[1 t0 1
].
Las soluciones (linealmente independientes) que cumplen u1(0) = e1 y u2(0) = e2 son las columnasde etA:
u1(t) =
[10
], u2(t) =
[t1
].

4.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 57
Finalmente, la solucion general u(t) = c1u1(t) + c2u2(t) sin notacion matricial se escribe
u1(t) = c1 + c2t
u2(t) = c2.
Naturalmente x(t) = c1 + c2t = u1(t) es la solucion general inmediata de la ecuacion de partidax′′ = 0, y u2(t) = c2 = x′(t).
Suma de la serie
En algunos casos que aparecen en Mecanica Clasica y sobre todo en Mecanica Cuantica es posiblesumar explıcitamente la serie que define la exponencial.
Ejemplo 4.2 Considerese el sistema correspondiente al oscilador armonico x′′ + x = 0:
x1 = x2
x2 = −x1
cuya matriz es
A =
[0 1−1 0
].
Esta matriz cumple A2 = −I, de modo que
A2 = −I, A3 = −A, A4 = I, A5 = A, . . .
y en adelante las potencias se repiten cıclicamente. Por tanto la matriz fundamental canonica delsistema es:
etA = I +t
1!A+
t2
2!A2 + · · ·
= I
(1− t2
2!+t4
4!− · · ·
)+ A
(t− t3
3!+t5
5!− · · ·
)= I cos t+ A sen t
=
[cos t sen t− sen t cos t
].
Las soluciones que cumplen u1(0) = e1 y u2(0) = e2 son las columnas de etA:
u1(t) =
[cos t− sen t
], u2(t) =
[sen tcos t
].
Finalmente, la solucion general u(t) = c1u1(t) + c2u2(t) sin notacion matricial se escribe
u1(t) = c1 cos t+ c2 sen t
u2(t) = −c1 sen t+ c2 cos t.
De nuevo x(t) = c1 cos t+ c2 sen t = u1(t) es la solucion general inmediata de la ecuacion de partidax′′ + x = 0, y u2(t) = x′(t).

58 CAPITULO 4. SISTEMAS LINEALES
Matrices diagonalizables
El caso mas frecuente en la practica es aquel en que la matriz A es diagonalizable.
Teorema 4.14 Si la matriz A es diagonalizable con valores propios λ1, . . . , λn y vectores propiosrespectivos linealmente independientes v1, . . . , vn, entonces la solucion general del sistema x = Ax es
u(t) = c1v1eλ1t + · · ·+ cnvne
λnt.
En este caso es evidente que
u = c1v1λ1eλ1t + · · ·+ cnvnλne
λnt
= c1(Av1)eλ1t + · · ·+ cn(Avn)eλnt
= A(c1v1eλ1t + · · ·+ cnvne
λnt)
= Au.
Y puesto que los vectores propios v1, . . . , vn son linealmente independientes, cualquier vector condi-cion inicial se puede escribir como combinacion lineal de ellos.
En notacion matricial, esta solucion equivale a tomar como matriz fundamental del sistema
U(t) = PetD,
donde P = [v1| · · · |vn] es la matriz de vectores propios y D = diag(λ1, . . . , λn). La matriz fundamentalcanonica de este sistema es
etA = PetDP−1.
Ejemplo 4.3 Sea el sistema
x1 = x1 + x2,
x2 = 3x1 − x2 + et.
En este caso
A =
[1 13 −1
], b(t) =
[0et
].
Los valores propios de la matriz A son λ1 = 2 y λ2 = −2, y la matriz de vectores propios (porcolumnas) es
P =
[1 11 −3
].
El sistema de ecuaciones para y es [y1
y2
]=
[2 00 −2
] [y1
y2
]y una matriz fundamental (dos soluciones linealmente independientes por columnas)
V (t) =
[e2t 00 e−2t
].
Por tanto, una matriz fundamental del sistema de partida es
W (t) = PV (t) =
[e2t e−2t
e2t −3e−2t
],

4.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 59
y las soluciones del sistema reducido son w(t) = W (t)c, o explıcitamente
w1(t) = c1e2t + c2e
−2t,
w2(t) = c1e2t − 3c2e
−2t.
Para hallar una solucion particular del sistema completo se usa la formula de variacion de constantes:
W−1(s) =1
4
[3e−2s e−2s
e2s −e2s
],
W−1(s)b(s) =1
4
[e−s
−e3s
],∫ t
W−1(s)b(s) ds = − 1
12
[3e−t
−e3t
],
v(t) = W (t)
∫ t
W−1(s)b(s) ds = −1
3
[et
0
],
o explıcitamente
v1(t) = −1
3et.
v2(t) = 0.
Finalmente, la solucion general del sistema de partida x = Ax+ b(t) es
u1(t) = c1e2t + c2e
−2t − 1
3et,
u2(t) = c1e2t − 3c2e
−2t.
Caso general: el metodo de Putzer
El teorema de Hamilton-Cayley demuestra que la potencia n-esima de cualquier matriz n× n sepuede expresar como combinacion lineal de las potencias inferiores I, A, . . . , An−1. Por lo tanto cabepensar que etA se pueda expresar tambien como un polinomio de la forma
etA = q0(t)I + q1(t)A+ q2(t)A2 + · · ·+ qn−1(t)An−1,
para ciertas funciones qk(t). Putzer dio dos metodos para expresar etA como un polinomio en A sinnecesidad de calcular la forma normal de Jordan de la matriz A. De ellos, se estudiara el mas sencillo.
Teorema 4.15 Sean λ1, . . . , λn los valores propios de la matriz A, y sean los polinomios
P0(A) = I, Pk(A) = (A− λ1I) · · · (A− λkI), k = 1, 2, . . . , n− 1.
EntoncesetA = r1(t)P0(A) + r2(t)P1(A) + · · ·+ rn(t)Pn−1(A)
donde las funciones rk(t) se determinan por recurrencia a partir del sistema de ecuaciones diferen-ciales lineales
r′1(t) = λ1r1(t), r1(0) = 1,
r′k+1(t) = λk+1rk+1(t) + rk(t), rk+1(0), k = 1, . . . , n− 1.

60 CAPITULO 4. SISTEMAS LINEALES
La demostracion se reduce a un calculo directo utilizando el teorema de Hamilton-Cayley. A conti-nuacion se estudiaran dos ejemplos generales que ilustran el uso del metodo.
Ejemplo 4.4 Sea A una matriz 2×2 con un unico valor propio λ doble. El metodo de Putzer permiteobtener facilmente una formula general para etA. Poniendo λ1 = λ2 = λ en el sistema anterior setiene,
r′1(t) = λr1(t), r1(0) = 1 ⇒ r1(t) = eλt.
r′2(t) = λr2(t) + eλt, r2(0) = 0 ⇒ r2(t) = t eλt.
Como P0(A) = I y P1(A) = A− λI,
etA = eλtI + t eλt(A− λI) = eλt(1− λt)I + teλtA.
Un caso particular de esta formula con λ = 0 se estudio en el ejemplo 4.1:
etA = I + tA.
Ejemplo 4.5 Sea A una matriz 2× 2 con dos valores propios distintos λ 6= µ. El metodo de Putzerpermite obtener facilmente una formula general para etA. Del sistema correspondiente se obtiene,
r′1(t) = λr1(t), r1(0) = 1 ⇒ r1(t) = eλt.
r′2(t) = µr2(t) + eλt, r2(0) = 0 ⇒ r2(t) =eλt − eµt
λ− µ.
Como P0(A) = I y P1(A) = A− λI,
etA = eλtI +eλt − eµt
λ− µ(A− λI) =
λeµt − µeλt
λ− µI +
eλt − eµt
λ− µA.
Un caso particular de esta formula con λ = i, µ = −i se estudio en el ejemplo 4.2:
etA =ie−it + ieit
i− (−i)I +
eit − e−it
i− (−i)A = (cos t)I + (sen t)A.
Con calculos del mismo tipo que los de estos ejemplos, aunque algo mas laboriosos, se puedenencontrar facilmente formulas generales para cualquier matriz 3× 3:
Si la matriz A 3× 3 tiene un unico valor propio λ triple, entonces
etA = eλt[I + t(A− λI) +
t2
2(A− λI)2
].
Si la matriz A 3× 3 tiene tres valores propios distintos λ, µ y ν, entonces
etA = eλt(A− µI)(A− νI)
(λ− µ)(λ− ν)+ eµt
(A− λI)(A− νI)
(µ− λ)(µ− ν)+ eνt
(A− λI)(A− µI)
(ν − λ)(ν − µ).
Si la matriz A 3× 3 tiene un valor propio doble λ y uno simple µ, entonces
etA = eλt [I + t(A− λI)] +eµt − eλt
(µ− λ)2(A− λI)2 − teλt
µ− λ(A− λI)2.