f¶‡sica matem¶atica no lineal 5 curso licenciatura en...
TRANSCRIPT

Fısica Matematica no lineal5 Curso Licenciatura en Fısica
Universidad de SalamancaTEMA I
2008-2009

Indice del Tema I
1 Dinamica de las Ecuaciones Diferenciales Ordinarias 11. Integracion de ecuaciones lineales de segundo orden . . . . . . . . . 1
1..1 Sistema lineal conservativo: El Oscilador armonico . . . . . 11..2 Sistema lineal no conservativo: El Oscilador amortiguado . . 2
2. Integracion de ecuaciones no lineales de segundo orden . . . . . . . 52..1 Funciones circulares e hiperbolicas . . . . . . . . . . . . . . . 52..2 Funciones elıpticas de Jacobi . . . . . . . . . . . . . . . . . . 62..3 Sistemas no lineales conservativos . . . . . . . . . . . . . . . 92..4 Sistemas no lineales no conservativos . . . . . . . . . . . . . 17
3. Analisis de singularidades . . . . . . . . . . . . . . . . . . . . . . . 213..1 Singularidades fijas y moviles . . . . . . . . . . . . . . . . . 213..2 El trabajo de Sofıa Kovalevskaya . . . . . . . . . . . . . . . 223..3 El trabajo de Paul Painleve . . . . . . . . . . . . . . . . . . 23
4. Algoritmo de Ars . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235. Ejemplos de aplicacion del algoritmo de ARS . . . . . . . . . . . . . 25
5..1 Oscilador anarmonico . . . . . . . . . . . . . . . . . . . . . . 255..2 Oscilador anarmonico amortiguado . . . . . . . . . . . . . . 265..3 Painleve I . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285..4 y′′ − xay3 = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . 295..5 Ecuacion de Fitzhugh-Nagumo . . . . . . . . . . . . . . . . 31
i
Tema 1
Dinamica de las EcuacionesDiferenciales Ordinarias
Las ecuaciones de Euler-Lagrange para un grado de libertad constituyen un casoparticular de dichas ecuaciones
1. Integracion de ecuaciones lineales de segundo
orden
1..1 Sistema lineal conservativo: El Oscilador armonico
x + ω20x = 0 (1.1)
• 1) Identificacion de una integral primera (energıa)
E =m
2(x2 + ω2
0x2) (1.2)
• 2) Cuadratura ∫dx√
2Em− ω2
0x2
=
∫dt (1.3)
• 3) Integracion explıcita
1
ω0
arcsin
ω0x√
2Em
= t + t0 (1.4)
1

2 Tema 1: Fısica Matematica no lineal
• 4) Lagrangiano y Hamiltoniano
L(x, x) =m
2x2 − 1
2mω2
0x2 (1.5)
p = mx ⇒ x =p
m(1.6)
H(x, p) =p2
2m+
1
2mω2
0x2 (1.7)
donde, al ser H independiente del tiempo, es una integral primera que coin-cide con la energıa por ser el sistema autonomo
1..2 Sistema lineal no conservativo: El Oscilador amor-tiguado
x + 2γx + ω20x = 0 (1.8)
Transformaciones de escala
Una forma de resolver el problema es hacer un cambio de escala que lo transformeen conservativo
x(t) = λ(t)W (z)
dz = φ(t)dt (1.9)
de forma que la ecuacion es:
W ′′ +1
φ
(2λ
λ+
φ
φ+ 2γ
)W ′ +
1
φ2
(λ
λ+ 2γ
λ
λ+ ω2
0
)W = 0 (1.10)
La ecuacion mas sencilla en W (z), es tal que:
1
φ2
(λ
λ+ 2γ
λ
λ+ ω2
0
)= ω2
1
φ
(2λ
λ+
φ
φ+ 2γ
)= 0 (1.11)
en cuyo caso
W ′′ + ω2W = 0

Dinamica de las Ecuaciones Diferenciales Ordinarias 3
Transformacion de escala I
• Una posibilidad es:
φ = 1, λ = e−γt ω2 = ω20 − γ2 (1.12)
En tal caso la ecuacion es la del oscilador armonico
W + ω2W = 0 (1.13)
• y por tanto se deriva del lagrangiano
LW =m
2W 2 − 1
2mω2W 2 (1.14)
pW = mW ⇒ W =pW
m(1.15)
HW =p2
W
2m+
1
2mω2W 2 (1.16)
que es independiente del tiempo y por tanto tenemos una integral primeraE = HW
• Para obtener la formulacion canonica en las variables iniciales, hemos detener en cuenta que ∫
LW dz =
∫Lxdt
como en este caso, z = t, entonces
Lx = LW =m
2
(x
λ− x
λ
λ2
)2
− 1
2mω2
(x
λ
)2
es decir:
Lx =1
λ2
[m
2(x + γx)2 − 1
2mω2x2
](1.17)
de forma que
px =m
λ2(x + γx) (1.18)
Hx =λ2
2mp2
x − γxpx +mω2
2λ2x2 (1.19)

4 Tema 1: Fısica Matematica no lineal
• Este Hamiltoniano depende explicitamente del tiempo y por tanto no esconstante. No obstante, si lo es E = HW que escrito en las variables (x, px)es:
E = λ2 p2x
2m+
mω2
2λ2x2 (1.20)
donde hemos tenido en cuenta que:
pW = mW =m
λ(x + γx) = pxλ
No es dıficil comprobar que efectivamente
dE
dt=
∂E
∂t+
[E, Hx
]= 0
Transformacion de escala II
Veamos ahora el caso ω = 0. En este caso se trata de una partıcula libre y laintegral primera es la velocidad, es decir:
I = W ′ =1
λφ
(x− λ
λx
)(1.21)
• Las ecuaciones (1.11) tienen la solucion trivial:
λ = eδt
φ = e−2(δ+γ)t =⇒ z ∼ e−2(δ+γ)t (1.22)
donde
δ± = −γ ±√
γ2 − ω20
Hay pues dos valores de δ que dan lugar a dos constantes de integraciondiferentes:
I± = e(δ±+2γ)t (x− δ±x)
I± = e
(γ±√
γ2−ω20
)t
[x− (−γ ±
√γ2 − ω2
0)x
](1.23)
de manera que aunque el sistema no es conservativo podemos encontrar dosintegrales primeras que dependen explicitamente del tiempo.
Podemos encontrar un analogo a la energıa del sistema haciendo:
E =m
2I+I− = e2γt
(x2 − 2γxx + ω2
0x2)
que obviamente coincide con la energıa del oscilador armonico cuando γ = 0.

Dinamica de las Ecuaciones Diferenciales Ordinarias 5
• La formulacion canonica en las variables W, z es trivialmente
LW =m
2(W ′)2
pW = mW ′
HW =p2
W
2m
• y el cambio de variables implica
Lx = φLW =m
2λ2φ
(x− λ
λx
)2
=m
2e2γt
(x− λ
λx
)2
px = me2γt
(x− λ
λx
)=
pW
λ
y por tanto el hamiltoniano
Hx =λ2φ
2mp2
x + δxpx =e−2γt
2mp2
x + δxpx
que como es facil comprobar, proporciona la ecuacion (1.8)
2. Integracion de ecuaciones no lineales de se-
gundo orden
2..1 Funciones circulares e hiperbolicas
Aparecen como integrales de raices de ecuaciones de segundo grado
x =
∫ y
0
dt√(1− t2)
= sin−1(y) (2.1)
cuya inversa esy = sin(x) (2.2)
En realidad se trata de funciones de variable compleja:
sin(x + iy) = sin(x)cosh(y) + i cos(x)sinh(y)
En las graficas siguientes se han representado las partes reales e imaginarias de lafuncion sin(x + iy), cos(x + iy). Como se puede comprobar son funciones que a lolargo del eje x tienen un perıodo 2π (funciones circulares) mientras que el perıodoimaginario es ∞ (funciones hiperbolicas)

6 Tema 1: Fısica Matematica no lineal
–20
0
x
–5
0
5
y
0
–20
0
x
–5
0
5
y
0
Partes real e imaginaria de la funcion seno
–20
0
x
–5
0
5
y
0
–20
0
x
–5
0
5
y
0
Partes real e imaginaria de la funcion coseno
2..2 Funciones elıpticas de Jacobi
Integrales elıpticas
Aparecen como integrales de raıces de polinomios de cuarto orden
• Las funciones sn, cn y dn
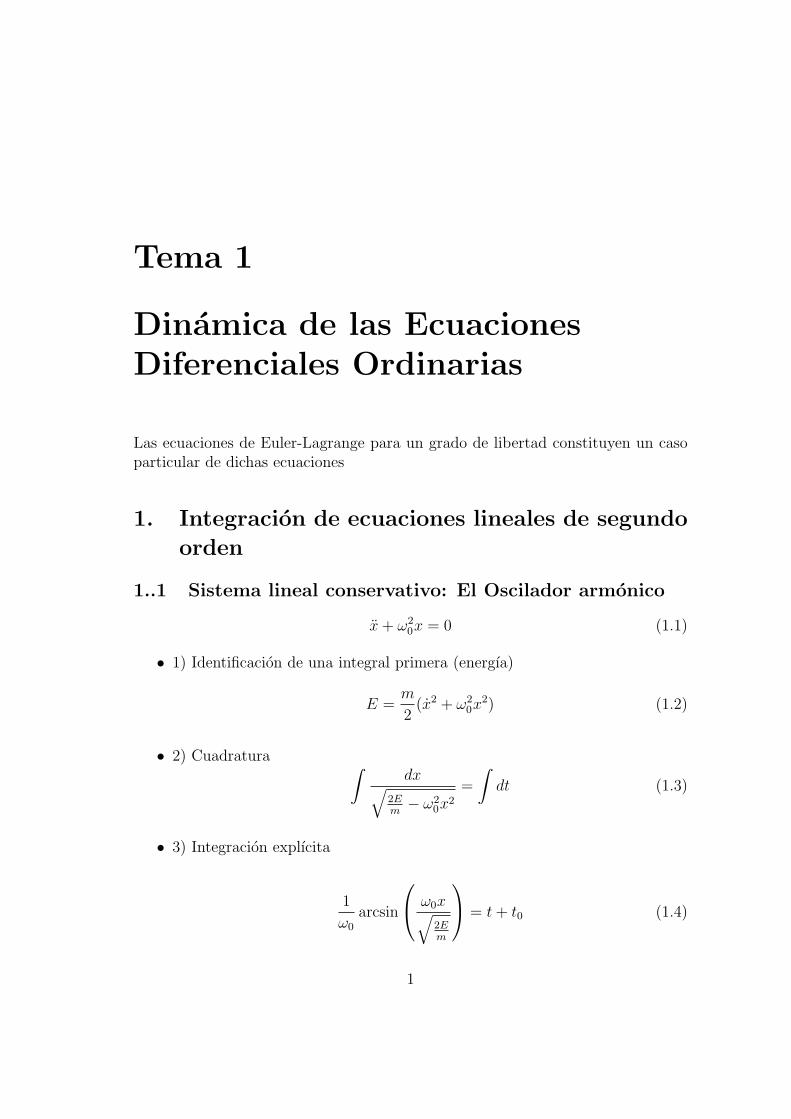
La funcion seno elıptico se define como
x =
∫ y
0
dt√(1− t2)(1− k2t2)
= sn−1(y; k) (2.3)
cuya inversa es
y = sn(x; k) (2.4)
Dinamica de las Ecuaciones Diferenciales Ordinarias 7
–1
1
z
La Funcion seno eliptico para k=0, 4/5, 1
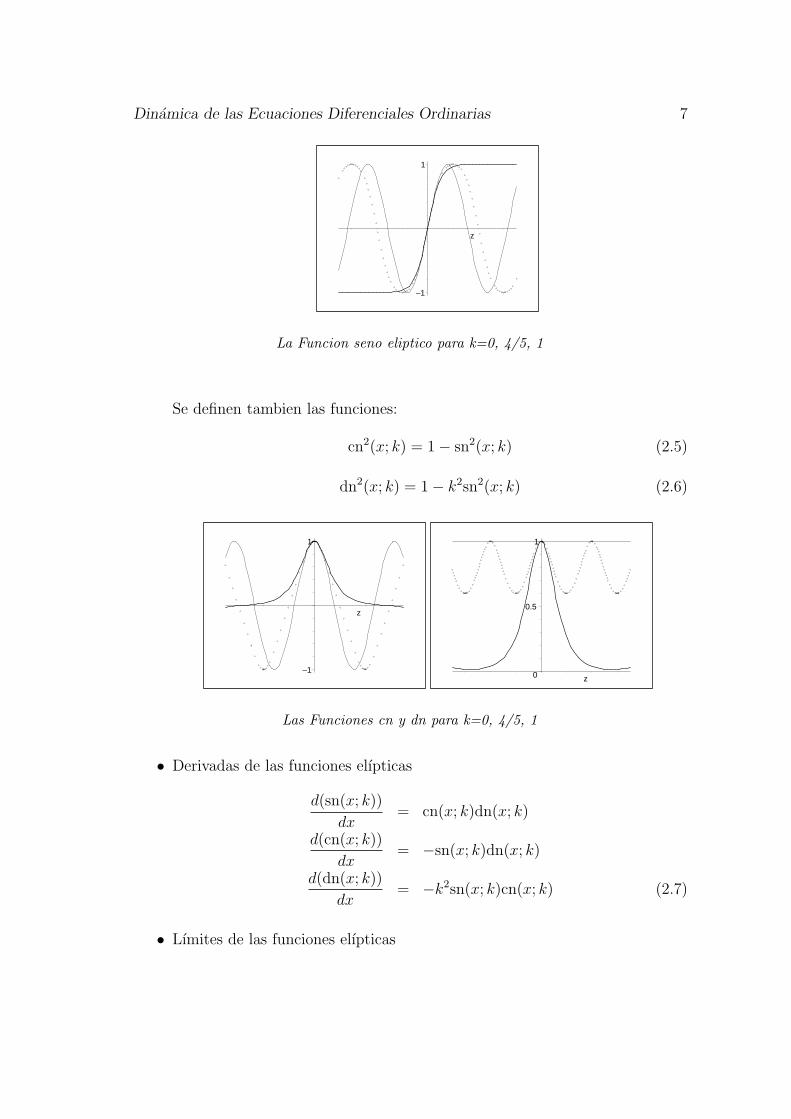
Se definen tambien las funciones:
cn2(x; k) = 1− sn2(x; k) (2.5)
dn2(x; k) = 1− k2sn2(x; k) (2.6)
–1
1
z
0
0.5
1
z
Las Funciones cn y dn para k=0, 4/5, 1
• Derivadas de las funciones elıpticas
d(sn(x; k))
dx= cn(x; k)dn(x; k)
d(cn(x; k))
dx= −sn(x; k)dn(x; k)
d(dn(x; k))
dx= −k2sn(x; k)cn(x; k) (2.7)
• Lımites de las funciones elıpticas

8 Tema 1: Fısica Matematica no lineal
a) Lımite Circular
sn(x; 0) = sin x
cn(x; 0) = cos x
dn(x; 0) = 1 (2.8)
b) Lımite Hiperbolico
sn(x; 1) = tanh x
cn(x; 1) =1
cosh x
dn(x; 1) =1
cosh x(2.9)
• Transformacion de Lame
sn(x; k) =
(1
k
)sn
(kx;
1
k
)
cn(x; k) = dn
(kx;
1
k
)
dn(x; k) = cn
(kx;
1
k
)(2.10)
• Argumento imaginario
La forma correcta de entender las funciones elıpticas es como funciones devariable compleja. En particular (ver problemas):
sn(ix; k) = i tn(x; k′)
cn(ix; k) =1
cn(x; k′)
dn(ix; k) =dn(x; k′)cn(x; k′)
(2.11)
conk′ =
√1− k2
de forma que son funciones con dos perıodos. El perıodo real se relacionacon k y el perıodo imaginario con k′.

Dinamica de las Ecuaciones Diferenciales Ordinarias 9
2..3 Sistemas no lineales conservativos
Pendulo
0Phi
Potencial del pendulo
La ecuacion de conservacion de la energıa es:
E =1
2ml2φ2 −mgl cos φ (2.12)
y por tanto ∫dφ√
E + mgl cos φ=
√2
ml2
∫dt
o bien ∫dφ√
E + mgl − 2mgl sin2 φ2
=
√2
ml2
∫dt
Si hacemos
k2 =E + mgl
2mgly = sin
φ
2
∫2
dy√(2mgl)(1− y2)(k2 − y2)
=
√2
ml2
∫dt (2.13)
que se resuelve haciendo
y = k sn(u; k)
2√2mgl
u =
√2
ml2(t + t0)

10 Tema 1: Fısica Matematica no lineal
y por tanto
u =
√g
l(t + t0)
En consecuencia
sinφ
2= k sn
[√g
l(t + t0), k
](2.14)
• Caso de oscilacion
Corresponde a k < 1. En tal caso la solucion es (2.14). Puesto que −1 < sn < 1el angulo tiene una amplitud maxima φM = 2 arcsin k de forma que el pendulooscila entre los valores
−φM < φ < φM , φM = 2arcsen(k) < π
–1
0
1
2
3
2 4 6 8 10t
Soluciones de oscilacion del pendulo para 0 < k < 1
• lımite hiperbolico
Corresponde a k = 1 y por tanto
sinφ
2= tanh
[√g
l(t + t0)
]
de forma que φ alcanza el valor π cuando la tangente hiperbolica vale 1, es decirpara t = ∞

Dinamica de las Ecuaciones Diferenciales Ordinarias 11
–3
–2
–1
0
1
2
3
• Caso de rotacion
Corresponde a k > 1. En tal caso hay que aplicar la transformacion de Lamea (2.14) de forma que la solucion es
sinφ
2= sn
[√g
lk(t + t0),
1
k
]
Asi que el angulo del pendulo recorre una y otra vez toda la circunferencia
–3
–2
–1
1
2
3
Soluciones de rotacion del pendulo para k > 1

12 Tema 1: Fısica Matematica no lineal
El potencial del doble valle
Corresponde al potencial
V = mω20
(x4
4a2− x2
2
)(2.15)
La ecuacion de conservacion de la energıa es:
E =1
2mx2 + mω2
0
(x4
4a2− x2
2
)(2.16)
que puede escribirse tambien como:
1
2mx2 =
mω20
4a2(x2
2 − x2)(x2 − x21)
siendo x1, x2 los puntos de retroceso
x21 = a2
1−√1 + α
x22 = a2
1 +
√1 + α
donde
α =4E
ma2ω20
> −1
Observese que x2 es siempre real pero x1 solo es real si α es negativo. Tenemospues que considerar dos casos
• −1 < α < 0 =⇒ ma2ω20
4< E < 0

Dinamica de las Ecuaciones Diferenciales Ordinarias 13
En este caso (si nos restringimos a la rama de la derecha) buscamos una solucionque oscile entre dos valores positivos x1 y x2. Por tanto tiene sentido hacer elcambio
x = x2dn(u; k) (2.17)
donde
x1 = x2
√1− k2 =⇒ k2 = 1− x2
1
x22
de forma que cuando dn(u; k) oscile entre√
1− k2 < dn < 1, x lo hara entrex1 < x < x2
De las expresiones de x1 y x2 obtenemos
α = −41− k2
(2− k2)2=⇒ E = −ma2ω2
0
1− k2
(2− k2)2
y por tanto
x21 = 2a2 1− k2
2− k2
x22 = 2a2 1
2− k2
x2 − x21 = (x2
2 − x21)cn
2 = x22k
2cn2
x22 − x2 = x2
2k2sn2
Substituyendo en la ecuacion del movimiento
x22k
4sn2cn2u2 =ω2
0
2a2x4
2k4sn2cn2
luego
u = x2ω0√2a
asi que
x = x2dn
(x2
ω0√2a
(t− t0); k
)
de forma que
x = a
√2
2− k2dn
(ω0√
2− k2(t− t0); k
)(2.18)
donde el parametro elıptico esta relacionado con la energıa por:
E = −ma2ω20
1− k2
(2− k2)2(2.19)

14 Tema 1: Fısica Matematica no lineal
• 1) Caso particular k = 0
Corresponde a E = −mω20a2
4
En tal caso la solucion es trivialmente x = x1 = x2 = ±a
• 2) Caso particular k = 1
Corresponde a E = 0
y por tanto x1 = 0 x2 =√
2a
La solucion es en consecuencia
x =
√2a
cosh (ω0(t + t0))
• α > 0 −→ E > 0
En este caso, de acuerdo con (2.19), ha de ser k > 1. Tenemos que utilizar portanto la relacion (2.10):
dn(x; k) = cn( x
k′; k′
), k′ =
1
k
de forma que la solucion sera

Dinamica de las Ecuaciones Diferenciales Ordinarias 15
2 4 6 8 10t
x = ak′√
2
2k′2 − 1cn
(ω0√
2k′2 − 1(t− t0); k
′)
(2.20)
donde el parametro elıptico esta relacionado con la energıa por:
E = ma2ω20k′2 1− k′2
(2k′2 − 1)2(2.21)
Solido rıgido libre
• Las ecuaciones del movimiento del solido rıgido libre en el sistema de ejesprincipales son:
I1dω1
dt+(I3 − I2)ω2ω3 = 0
I2dω2
dt−(I3 − I1)ω1ω3 = 0
I3dω3
dt+(I2 − I1)ω1ω2 = 0 (2.22)
donde hemos ordenado los momentos de inercia en la forma
I1 ≤ I2 ≤ I3
• La energıa cinetica y el momento angular se conservan. Por tanto:
J2 = I21ω
21 + I2
2ω22 + I2
3ω23 (2.23)
T =1
2I1ω
21 +
1
2I2ω
22 +
1
2I3ω
31 (2.24)
De forma que el movimiento es posible solo si
2TI1 ≤ J2 ≤ 2TI3 (2.25)

16 Tema 1: Fısica Matematica no lineal
• Entre (2.23) y (2.24) podemos despejar ω1 y ω3
J2 − 2TI1 = I2(I2 − I1)ω22 + I3(I3 − I1)ω
23
2TI3 − J2 = I1(I3 − I1)ω21 + I2(I3 − I2)ω
22
luego
ω21 =
2TI3 − J2
I1(I3 − I1)
1− I2(I3 − I2)
2TI3 − J2ω2
2
ω33 =
J2 − 2TI1
I3(I3 − I1)
1− I2(I2 − I1)
J2 − 2TI1
ω22
(2.26)
Substituyendo en (2.22)
0 = I2dω2
dt−
[2TI3 − J2
I1
1− I2(I3 − I2)
2TI3 − J2ω2
2
J2 − 2TI1
I3
1− I2(I2 − I1)
J2 − 2TI1
ω22
]1/2
Haciendo
sn(y; k) =
√I2(I3 − I2)
2TI3 − J2ω2
k sn(y; k) =
√I2(I2 − I1)
J2 − 2TI1
ω2 (2.27)
y por tanto
k =
√(I2 − I1)(2TI3 − J2)
(I3 − I2)(J2 − 2TI1)(2.28)
Con ese cambio
I2
√2TI3 − J2
I2(I3 − I2)
dy
dt− (I3 − I1)
[(2TI3 − J2)
I1(I3 − I1)
(J2 − 2TI1)
I3(I3 − I1)
]1/2
= 0
dy
dt−
[(I3 − I2)(J
2 − 2TI1)
I1I2I3
]1/2
= 0
Llamando
Ω =
[(I3 − I2)(J
2 − 2TI1)
I1I2I3
]1/2
(2.29)
y = Ω(t− t0)

Dinamica de las Ecuaciones Diferenciales Ordinarias 17
obtenemos
ω2 =
√2TI3 − J2
I2(I3 − I2)sn(Ω(t− t0); k)
ω1 =
√2TI3 − J2
I1(I3 − I1)cn(Ω(t− t0); k) (2.30)
ω3 =
√J2 − 2TI1
I3(I3 − I1)dn(Ω(t− t0); k)
2..4 Sistemas no lineales no conservativos
Oscilador cubico amortiguado
Sea el potencial
V = a2
(x3
3− b2x
)(2.31)
• La ecuacion de una partıcula con rozamiento en este potencial sera:
x + 2γx + a2(x2 − b2) (2.32)
Haciendo el cambio de variables
x(t) = λ(t)w(z) + µ(t)
dz = φ(t)dt (2.33)
la ecuacion es
w′′+1
φ
(2λ
λ+
φ
φ+ 2γ
)w′ +
a2λ
φ2w2 +
1
φ2
(λ
λ+ 2γ
λ
λ+ 2a2µ
)w +
1
λφ2
(µ + 2γµ + a2(µ2 − b2)
)= 0 (2.34)
Para que sea una ecuacion conservativa en w(z), hemos de hacer:
2λ
λ+
φ
φ+ 2γ = 0
λ = φ2
con lo cualλ
λ= 2
φ
φ= −4
5γ

18 Tema 1: Fısica Matematica no lineal
Podemos fijar
z ∼ e−2γ5
t, φ = e−2γ5
t, λ = e−4γ5
t
y la ecuacion es:
w′′ + a2w2 +1
φ2
(−24
25γ2 + 2a2µ
)w +
1
φ4
(µ + 2γµ + a2(µ2 − b2)
)(2.35)
• De forma que necesariamente
µ =12γ2
25a2
µ2 = b2
• luego la unica posibilidad de integrar la ecuacion es cuando
b2 =
(12γ2
25a2
)2
(2.36)
en cuyo caso
W ′′ + a2W 2 = 0 (2.37)
que puede integrarse como
E =1
2W ′2 +
1
3W 3
que equivale al movimiento de una partıcula en un potencial cubico w3
3. Hay una
raiz real w0 y dos complejas conjugadas. Las soluciones son de la forma
W =a2
0
2
(√3− 3
1 + cn [a0(z − z0), k]
1− cn [a0(z − z0), k]
)
con
k2 =
√3
4+
1
2y
E =
√3a6
0
8
Por tanto la solucion para x es:
x =12γ2
25a2+
2γ2a20
25a2
√3− 3
1 + cn[a0(e
− 2γt5 − e−
2γt05 ), k
]
1− cn[a0(e
− 2γt5 − e−
2γt05 ), k
]

Dinamica de las Ecuaciones Diferenciales Ordinarias 19
• Lımite hiperbolico: Cuando E = 0 =⇒ a0 = 0 se puede expandir
cn[a0(e
− 2γt5 − e−
2γt05 ), k
]= 1−
[a0(e
− 2γt5 − e−
2γt05 )
]2
2
y por tanto en este lımite
x =12γ2
25a2− 6γ2
25a2
(1− tanh(
γ (t− t0)
5)
)2
y la solucion se comporta como en la figura
Solucion del oscilador cubico con rozamiento para E=0
• Constante del movimientoSi escribimos E en terminos de dependiente del tiempo x, tenemos la siguiente
constante del movimiento
E =1
a2λ3
[1
2
(x +
4γ
5(x− b)
)2
+a2
3(x− b)3
]
E ∼ e125
γt
[1
2
(x +
4γ
5(x− b)
)2
+a2
3(x− b)3
](2.38)
• Lagrangianoel lagrangiano correspondiente a (2.37) sera:
LW =1
2W ′2 − W 3
3(2.39)

20 Tema 1: Fısica Matematica no lineal
y la accion ∫LW dz =
∫Lxdt
por tantoLx = φLW (2.40)
de manera que deshaciendo la transformacion de escala
Lx =a4
φ5
[1
2
(x +
4γ
5(x− b)
)2
− a2
3(x− b)3
]
que salvo una constante multiplicativa es el lagrangiano no autonomo :
Lx = e2γt
[1
2
(x +
4γ
5(x− b)
)2
− a2
3(x− b)3
](2.41)
de forma que el momento canonico es:
p = e2γt
(x +
4γ
5(x− b)
)
y el Hamiltoniano
Hx = e−2γt p2
2− 4γ
5p(x− b) + e2γt a
2
3(x− b)3 (2.42)
que aun no siendo conservado tiene la constante dada por (2.38):
E = e−85γt p
2
2+ e
125
γt a2
3(x− b)3 (2.43)
es facil comprobar quedE
dt=
∂E
∂t+ [E, H]
• Las ecuaciones de Hamilton son
p = −e2γta2 (x− b)2 +4γ
5p
x = e−2γtp− 4γ
5(x− b)
que eliminando p son la ecuacion original si b = 12γ2
25a2
x + 2γx + a2(x2 − b2)

Dinamica de las Ecuaciones Diferenciales Ordinarias 21
3. Analisis de singularidades
3..1 Singularidades fijas y moviles
Cuando Leibniz introdujo el signo integral en el siglo XVII no resolvio unicamentela ecuacion diferencial mas simple, sino que al tiempo inicio una de las ramasmas importantes de la matematica. Su trabajo se siguio con un estudio intensivode ecuaciones diferenciales, y ya a finales del siglo XVIII la mayor parte de losmetodos de integracion que hoy conocemos estaban establecidos, de forma que lacuestion parecıa concluida, entre otros motivos porque se entendıa por integracionla construccion de soluciones globales en terminos de funciones elementales.
En anos posteriores el concepto de integracion dejo de ser tan restrictivo. Elinicio del estudio de singularidades en el plano complejo para ecuaciones diferen-ciales se atribuye a Cauchy. Su idea fundamental reside en considerar solucioneslocales en el plano complejo y emplear metodos de prolongacion analıtica con elfin de obtener soluciones globales . Es este un procedimiento que requiere conocerla localizacion en el plano complejo de las singularidades de la ecuacion y en estesentido, es esencial distinguir entre dos tipos de singularidades:
• Singularidades fijas: son las que quedan determinadas por los coeficientes dela ecuacion, y su localizacion no depende por tanto de las condiciones iniciales.
• Singularidades moviles: son aquellas cuya localizacion en el plano complejo sıdepende de las condiciones iniciales.
Las ecuaciones diferenciales lineales poseen la propiedad comun a todas ellas deque todas las singularidades de sus soluciones son fijas. Consideremos por ejemplola ecuacion:
(x− c)yx = by
cuya solucion se escribe en la forma:
y = k(x− c)b
Cuando b es un entero positivo la solucion es holomorfa; para b entero negativo
x = c es un polo fijo de la solucion; para b racional es un punto de ramificacion alge-braico y para cualquier otro valor de b es un punto de ramificacion transcendental.Es importante notar que en cualquiera de los casos se trata de una singularidadfija ya que no depende de la constante de integracion k sino solo del parametro cque aparece en la ecuacion.

22 Tema 1: Fısica Matematica no lineal
No sucede lo mismo con las ecuaciones diferenciales no lineales que puedenpresentar singularidades de ambos tipos. La solucion de una ecuacion diferen-cial ordinaria (ODE) puede poseer singularidades diversas. Se denominan puntoscrıticos a todas aquellas singularidades que no sean polos de cualquier orden, ypueden ser singularidades esenciales o puntos de ramificacion. Para aclarar ideas,sea la ecuaciones :
ayyxx + (1− a)y2x = 0 (3.1)
cuya solucion es:
y(x) = α(x− x0)a (3.2)
siendo α y x0 constantes de integracion. x = x0 es una singularidad movil.Los trabajos pioneros en el estudio de singularidades moviles de ecuaciones
diferenciales no lineales suelen atribuirse principalmente a Fuchs y Briot y Bouqueten su analisis de ecuaciones de tipo Riccati. La presencia de singularidades movilesen las soluciones de algunas ecuaciones les llevo a constatar que unicamente laintegracion de la ecuacion diferencial les permitıa afirmar si las singularidadeseran o no moviles, o dicho de otra forma, si dependıan o no de las constantes deintegracion y en ultimo termino de las condiciones iniciales. Esta constatacionechaba por tierra por el momento, la esperanza de conocer a priori el tipo desingularidades de una ecuacion antes de que esta fuera integrada.
3..2 El trabajo de Sofıa Kovalevskaya
El trabajo realmente decisivo en lo que concierne a la relacion entre la estructuraanalıtica de un sistema y su integrabilidad se atribuye a la matematica rusa SofiaKovalevskaya. Su labor estuvo centrada en el estudio del movimiento del solidorıgido con un punto fijo, a partir del analisis de las singularidades de las soluciones. El movimiento viene descrito por un sistema de seis ecuaciones ordinarias, nolineales, acopladas y de primer orden (ecuaciones de Euler):
En la epoca de Kovalevskaya, las soluciones de estas ecuaciones se conocıansolo en algunos casos. El trabajo de Kovalesvskaya fue completamente nuevo ydirigido a determinar para que valores de los parametros las unicas singularidadesmoviles de las soluciones en el plano complejo son polos. Encontro que existıansolo cuatro situaciones posibles para las cuales se satisfacıa esta condicion:
El trabajo de Sofia Kovalevskaya, aparentemente motivado por el de Fuchs,no fue totalmente comprendido en su epoca. Parecıa extrano que un estudio desingularidades en el plano complejo fuera capaz de determinar la integrabilidadde un sistema, y en este sentido, sus logros se entendieron como una propiedadespecial del solido rıgido que no podrıa ser aplicable a otro tipo de sistemas fısicos.

Dinamica de las Ecuaciones Diferenciales Ordinarias 23
3..3 El trabajo de Paul Painleve
A pesar de que el trabajo de Kovalevskaya no fue en apariencia continuado, algunosmatematicos de la ultima decada del siglo pasado centraron su atencion en laclasificacion de ecuaciones diferenciales ordinarias (ODE’s) de acuerdo a los tiposde singularidades que sus soluciones pudieran exhibir.
Fue el matematico frances Paul Painleve quien, siguiendo las ideas de Fuchs,Kovalevskaya, Picard y otros, clasifico completamente las ecuaciones de primerorden y estudio las de segundo del tipo:
d2y
dx2= F
(dy
dx, y, x
)
donde F es una funcion analıtica de x y racional en y y dy/dx. Constato que las
ecuaciones de estas caracterısticas podıan presentar puntos crıticos moviles. Laexistencia de este tipo de singularidades le hizo centrar su atencion en un doblemetodo: por una parte encontrar las condiciones necesarias para que todos lospuntos crıticos de las soluciones fueran fijos, y por otra, decidir si estas condicioneseran suficientes para asegurar la integrabilidad de la ecuacion .
En este sentido, encontro 50 tipos de ecuaciones cuyas unicas singularidadesmoviles eran polos ordinarios. Esta propiedad analıtica especial lleva hoy su nom-bre y en lo sucesivo nos referiremos a ella como Propiedad de Painleve (PP).De estos 50 tipos, 44 pueden ser integrados en terminos de funciones conocidas(ecuaciones de Riccati, funciones elıpticas, ecuaciones lineales, etc.) y las seisrestantes, a pesar de tener soluciones meromorfas, no poseen integrales algebraicasque permitan reducir la ecuacion a cuadraturas, y son lo que hoy conocemos comoTranscendentes de Painleve .
La aportacion esencial de Paul Painleve reside en que sienta las bases de unateorıa que, al contrario de lo que se pensaba hasta entonces, permitirıa a pri-ori mediante un analisis de singularidades, decidir sobre la integrabilidad de unaecuacion sin necesidad de resolverla primero.
Los resultados de Painleve parecieron tener poca relevancia para los pro-blemas fısicos y desaparecieron pronto de la literatura. En las ultimas decadasdel presente siglo, las ideas de Kovalevskaya y Painleve resurgen nuevamente ju-gando un papel importante a la hora de analizar y entender la integrabilidad delos sistemas fısicos.
4. Algoritmo de Ars
La labor iniciada por Paul Painleve fue retomada en las ultimas decadas del pre-sente siglo. Entre 1955 y 1960 la ecuacion de KdV, conocida desde el siglo ante-rior, reaparece en los trabajos de Fermi-Ulam-Pasta y en el contexto de la fısica

24 Tema 1: Fısica Matematica no lineal
de plasmas. Es hacia 1965 con Zabusky y Kruskal cuando surge por primera vezel concepto de soliton, que define soluciones de onda solitaria que interactuan sinsufrir ninguna transformacion exceptuando un pequeno cambio en la fase.
Motivados por este descubrimiento, desarrollaron la tecnica del Scattering In-verso (IST) que permitio en principio resolver la ecuacion de KdV y posteriormentegran numero de ecuaciones integrables con soluciones solitonicas.
Los numerosos exitos obtenidos por IST relacionados directamente con el prob-lema de la integrabilidad, llevaron a Ablowitz, Ramani y Segur a desarrollar unalgoritmo (similar al empleado por Kovalevskaya en el problema del solido rıgido)para determinar cuando una ecuacion diferencial ordinaria posee la PP. Como yaadelantamos, se dice que una ODE posee la PP si las unicas singularidadesmoviles de sus soluciones son polos, o dicho de otra forma, cuando todasolucion es univaluada excepto en las singularidades fijas de los coeficientes.
El algoritmo de ARS constituye un metodo para determinar la naturaleza delas singularidades de las soluciones de una ODE a base de analizar sus propiedadeslocales. Consiste basicamente en verificar si las soluciones de la ecuacion puedenser expresables en la forma:
x(t) =∞∑
j=0
aj(t− t0)j−α (4.1)
en un entorno de la singularidad t = t0, donde aj son coeficientes constantes. Enel caso de que una serie de este tipo sea consistente como solucion de la ODE, sedice que la ecuacion posee la PP y por tanto se conjetura integrable.
El metodo ARS consiste en probar que (4.1) es consistente como solucion de laecuacion, mediante un procedimiento algorıtmico que puede ser descrito en variospasos:
• 1) Determinar el valor de α mediante un balance de terminos dominantes, elcual permitira obtener al mismo tiempo el primer coeficiente a0 de la serie. Eneste punto es importante senalar que tanto α como a0 pueden, para determinadasecuaciones, no ser unicos. Se dice entonces que la ecuacion en cuestion presentavarias ramas de expansion, y los pasos siguientes deberan ser evaluados para cadauna de ellas por separado. La ecuacion poseera la PP solo si se demuestra que latiene para todas y cada una de las ramas.
• 2) Sustituir directamente (4.1) en la ecuacion diferencial, lo cual proporcionauna relacion de recurrencia para cada aj que puede escribirse como:
(j − β1) · · · (j − βN)aj = Fj(φzi, · · · , uk, (uk)zi
; k < j) (4.2)

Dinamica de las Ecuaciones Diferenciales Ordinarias 25
Dicha relacion es el resultado de anular por separado los coeficientes en las difer-entes potencias de t − t0 y permite obtener cada aj en terminos de ak (k < j)siempre que j 6= βi . Observese sin embargo que, para j = βi, con i = 1, .., N ,el primer miembro de (4.2) se anula, por lo que la correspondiente funcion aβi
esarbitraria .Tales valores de j se denominan resonancias y para ellos la ecuacion(4.2) se convierte en una relacion que deben satisfacer ak (con k < βi) y quese denomina condicion en la resonancia. Dado que el numero de constantesarbitrarias de las que debe depender la solucion de una ODE viene determinadopor el orden de la ecuacion, resulta evidente que el numero de resonancias seraprecisamente el orden de la ecuacion menos uno ya que la otra constante arbitrariaes t0.
• 3) Comprobar que las condiciones en las resonancias se satisfacen, es decir,que Fj = 0 se verifica identicamente para j = βi . Se dice que una ODE posee la
PP y por tanto es integrable si se sigue consistentemente el proceso anterior de 1)a 3) con α entero positivo y con resonancias enteras positivas salvo en j = −1 quees la resonancia que suele estar asociada a la arbitrariedad en t0.
5. Ejemplos de aplicacion del algoritmo de ARS
5..1 Oscilador anarmonico
y′′ + y − 2y3 = 0 (5.1)
• Expansion
y =a0
φ+ a1 + a2 φ + a3 φ2 + a4 φ3 + a5 φ4 + a6 φ6 (5.2)
• Coeficiente en φ−3 (j=0)
−2 a0 (a0 − 1) (a0 + 1) = 0
a02 = 1 (5.3)
• Coeficiente en φ−2 (j=1)
−6 a1 = 0
a1 = 0 (5.4)

26 Tema 1: Fısica Matematica no lineal
• Coeficiente en φ−1 (j=2)
a0 − 6 a0 a12 − 6 a0
2 a2 = 0
a2 =1
6
1
a0
(5.5)
• Coeficiente en φ0 (j=3)
2 a3 + a1 − 2 a13 − 6 a0
2 a3 − 12 a0 a2 a1 = 0
a3 = 0 (5.6)
• Coeficiente en φ1 (j=4) Resonancia
a2 + 6 a4 − 6 a0 a22 − 6 a0
2 a4 − 6 a2 a12 − 12 a0 a3 a1 = 0
Substituyendo los coeficientes
0 = 0 (5.7)
Luego tiene la Propiedad de Painleve
5..2 Oscilador anarmonico amortiguado
La ecuacion es:
y′′ + by′ + y − 2y3 = 0 (5.8)
• Expansion
y =a0
φ+ a1 + a2 φ + a3 φ2 + a4 φ3 (5.9)
• Coeficiente en φ−3 (j=0)
−2 a0 (a0 − 1) (a0 + 1) = 0
a02 = 1 (5.10)
• Coeficiente en φ−2 (j=1)
−a0 (6 a0 a1 + b) = 0
a1 = −1
6
b
a0
(5.11)

Dinamica de las Ecuaciones Diferenciales Ordinarias 27
• Coeficiente en φ−1 (j=2)
a0 − 6 a0 a12 − 6 a0
2 a2 = 0
a2 = − 1
36
−6 + b2
a0
(5.12)
• Coeficiente en φ0 (j=3)
2 a3 + a1 − 2 a13 − 6 a0
2 a3 − 12 a0 a2 a1 + b a2 = 0
a3 = − 1
108
b (−9 + 2 b2)
a0
(5.13)
a2 + 6 a4 − 6 a0 a22 − 6 a0
2 a4 − 6 a2 a12 − 12 a0 a3 a1 + 2 b a3 = 0
b2(2b2 − 9) = 0 (5.14)
Luego la condicion en la resonancia se cumple solo si ;
b =3
2
√2 (5.15)

28 Tema 1: Fısica Matematica no lineal
5..3 Painleve I
La ecuacion es:y′′ − 6y2 − x = 0 (5.16)
• Expansion
y =a0
φ2+
a1
φ+ a2 + a3 φ + a4 φ2 + ... (5.17)
donde φ = x− x0
• Coeficiente en φ−4 (j=0)
−6 a0 (a0 − 1) = 0
a0 = 1 (5.18)
• Coeficiente en φ−3 (j=1)
−2 a1 (−1 + 6 a0 ) = 0
a1 = 0 (5.19)
• Coeficiente en φ−2 (j=2)
−6 a12 − 12 a0 a2 = 0
a2 = 0 (5.20)
• Coeficiente en φ−1 (j=3)
−12 a0 a3 − 12 a1 a2 = 0
a3 = 0 (5.21)
• Coeficiente en φ0 (j=4).
2 a4 − 6 a22 − 12 a0 a4 − x0 − 12 a3 a1 = 0
a4 = − 1
10x0 (5.22)
• Coeficiente en φ1 j=5
−12 a0 a5 − 1 + 6 a5 − 12 a4 a1 − 12 a2 a3 = 0
a5 =−1
6(5.23)

Dinamica de las Ecuaciones Diferenciales Ordinarias 29
• Coeficiente en φ2 j=6 Resonancia
−6 a32 + 12 a4 − 12 a0 a4 − 12 a2 a4 − 12 a1 a5 = 0
0 = 0 (5.24)
Luego tiene la propiedad de Painleve
5..4 y′′ − xay3 = 0
• Expansion
y =a0(x)
φ+ a1(x) + a2(x)φ + a3(x)φ2 + a3(x)φ3 + a4(x)φ3 + a5(x)φ4 + ... (5.25)
• Coeficiente en φ−3 (j=0)
a0 =√
2φx
φ(5.26)
• Coeficiente en φ−2 (j=1)
−a0φxx − 3xaa20a1 − 2a0,xφx = 0
a1 = −√
2
6
(3xv − a
x√
(xa)
)(5.27)
• Coeficiente en φ−1 (j=2)
a2 =
√2
72φx
(a2 + 6a + 12x2vx − 6x2v2
x2√
(xa)
)(5.28)
• Coeficiente en φ0 (j=3)
a3 =
√2
432φ2x
(−18x3vxx + 3a2vv + 18axv + 54x3vvx − 18x3v3 − 6a2 − a3
x3√
(xa)
)
(5.29)

30 Tema 1: Fısica Matematica no lineal
• Coeficiente en φ1 (j=4). Resonancia
−a0φxx − 3xaa20a1 − 2a0,xφx = 0
a(12a2 + 45a + 54 + a3) = a(a + 3)2(a + 6) = 0
luego la condicion en la resonancia se cumple unicamente si
a = (0,−3,−6) (5.30)
Transformacion de escala
Vamos a ver en los casos integrables como hacer una transformacion de escala quenos permita resolver la ecuacion por cuadraturas. Para ello hacemos
y(x) = λ(x)W (z), dz = N(x)dx
con lo que la ecuacion queda
W ′′ +1
N
(2λx
λ+
Nx
N
)W − λ2xa
N2W 3 +
1
N2
λxx
λW = 0
• Para eliminar el termino en W ′
N = λ−2 (5.31)
• Para homogeneizar el termino en W 3
λ = xa/6
W ′′ −W 3 + λ3λxxW = 0
• Caso a=-6Basta hacer
λ = x −→ N = x−2
y = xW −→ z =−1
x(5.32)
y la ecuacion esW ′′ −W 3 = 0 (5.33)
cuya integral primera es
E =1
2W ′2 − 1
4W 4
E =1
2x2y2
x − xyyx +1
2y2 − 1
4
y4
x4= 0 (5.34)

Dinamica de las Ecuaciones Diferenciales Ordinarias 31
• Caso a=-3Basta hacer
λ =√
x −→ N = 1/x
y =√
2W −→ z = ln x (5.35)
y la ecuacion es
W ′′ −W 3 − W
4= 0 (5.36)
cuya integral primera es
E =1
2W ′2 − 1
4W 4 − W 2
8= 0
E =1
2xy2
x −1
2yyx − 1
4
y4
x2= 0 (5.37)
5..5 Ecuacion de Fitzhugh-Nagumo
• Ecuacion
La ecuacion es:yxx − cyx − 2b2y(y − 1)(y − g) = 0 (5.38)
La ecuacion no tiene la PP por lo que vamos a tratar de encontrar solucionesparticulares que si la tengan
• Expansion Truncada
y = ao(x)
φ(5.39)
substituyendo
• Coeficiente en φ−3. Calculo de a0
a0 = ±φx
b
• Coeficiente en φ−2. Determinacion de v
v =c
3+
2
3gb +
2
3b
• Coeficiente en φ−1. Determinacion de c
c = (b(g − 2), b(1− 2g))

32 Tema 1: Fısica Matematica no lineal
• c = b(g − 2)En tal caso
v = gb
φ = B0
(1 + egb(x−x0)
)
y =g
2
(1 + tanh
(gb
2(x− x0)
))
• c = b(1− 2g)En tal caso
v = b
φ = B0
(1 + eb(x−x0)
)
y =1
2
(1 + tanh
(b
2(x− x0)
))

Dinamica de las Ecuaciones Diferenciales Ordinarias 33
Problemas para entregar el 23 de octubre
1) Determinar las funciones elıpticas con argumento imaginario
2) Resolver los estados ligados correspondientes al movimiento de una partıculaen el potencial V = a2 (x3/3− c2x)
3) Considerar la ecuacion:
x + 2γx− ω20
(x3/a2 − x
)
• Determinar la relacion entre los coeficientes para que una transformacion deescala de la forma:
x(t) = λ(t)W (z), dz = φ(t)dt
permita escribir la ecuacion en forma conservativa
• Para los valores de los coeficientes obtenidos en el apartado anterior, resolverla ecuacion del movimiento.
• Aplicar a la ecuacion original el test de Painleve.
• Determinar un Hamiltoniano para la ecuacion en el caso integrable
4) Demostrar que el segundo transcendente
y′′ − 2y3 − xy = 0
tiene la propiedad de Painleve

Bibliografıa
[1] Arnold V:I:, Mecanica Clasica: Metodos Matematicos, Paraninfo, Madrid,(1983)
[2] Fernandez Ranada A., Dinamica Clasica, Alianza editorial, Madrid, (1990)
[3] Glendinning P., Stability, Instability and Chaos, Wiley and sons, New York,(1994)
[4] Jordan D.W. and Smith P., Nonlinear Ordinary Differential Equations,Clarendon Press, Oxford, (1989)
[5] Olver P. J.., Applications Of Lie Groups to Differential Equations, SpringerVerlag, (1986).
[6] Remoissenet M., Waves called solitons: Concepts and experiments, SpringerVerlag, (1996)
[7] Stephani H., Differential Equations: Their solutions using symmetries, Cam-bridge University Press, (1989).
[8] Sattinger and Weaver., Lie groups and Lie algebras with applications tophysics, Geometry and Mechanics, Springer Verlag, (1993).
[9] Tabor M. , Chaos and integrability in nonlinear dynamics, Cambridge Uni-versity Press, Cambridge texts in applied mathematics, (1989).
41