exp planificacion
TRANSCRIPT

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 1/18
LOGO
I.A Planificación
Sección ³S´
UNIVERSIDAD BICENTENARIA DE ARAGUA
VICERRECTORADO ACADEMICO
FACULTAD DE INGENIERIA
ESCUELA DE SISTEMAS

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 2/18
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 3/18
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 4/18
Conceptos Básicos
Plan: secuencia de acciones individuales que permiten alcanzar una
meta a partir de una situación inicial.
Plani¿cación enIA
: procedimiento automático para encontrar un plan para unproblema concreto, Se pueden aplicar directamente los métodos conocidos de
búsqueda en espacio de estados pero en ocasiones presentan problemas de
e¿ciencia.
Un nivel es un conjunto de metas que definen la posición de bloques que se
encuentran a una misma altura (en el estado meta) o de manera equivalente,bloques que tienen exactamente el mismo número de bloques por debajo de ellos.
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 5/18
Tipos de Planificación
Planificador de or den total: Cuando un planificador trabaja en todo momento
con una lista de pasos ordenados.
Planificador de or den parcial: El planificador puede agregar pasos sin
especificar siempre un orden
Conceptos Básicos
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 6/18
El planificador implementado es un planificador de orden parcial con las siguientes
características:
Ya que el problema del mundo de los bloques es en esencia un problema de
apilar Bloques, resulta natural elegir primero metas últimas (en adelante, metas)
de abajo hacia arriba. De esta forma podemos decir que el planificador trabaja
por niveles.
El planificador comienza tratando de satisfacer metas en el primer nivel ± el nivel
de los bloques que se encuentran sobre la mesa ± y continúa de forma iterativacon los niveles siguientes sólo hasta que ha considerado todas las metas del
nivel actual .
Política de elección de sub-metas1
Mundo de Bloques
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 7/18
Inteligencia Artificial
Mundo de Bloques
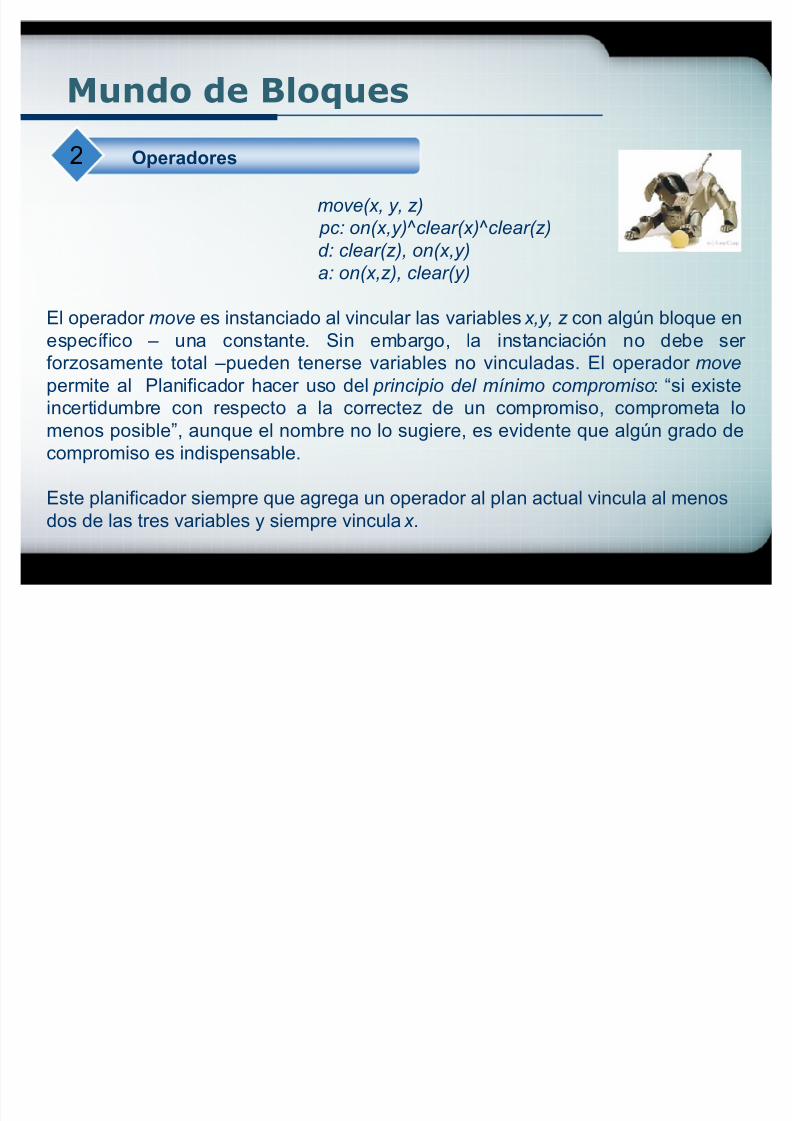
Operadores2
move(x, y, z)
pc: on(x,y)^clear(x)^clear(z)
d: clear(z), on(x,y)
a: on(x,z), clear(y)
El operador move es instanciado al vincular las variables x,y, z con algún bloque en
específico ± una constante. Sin embargo, la instanciación no debe ser
forzosamente total ±pueden tenerse variables no vinculadas. El operador move
permite al Planificador hacer uso del principio del mínimo compromiso: ³si existe
incertidumbre con respecto a la correctez de un compromiso, comprometa lomenos posible´, aunque el nombre no lo sugiere, es evidente que algún grado de
compromiso es indispensable.
Este planificador siempre que agrega un operador al plan actual vincula al menos
dos de las tres variables y siempre vincula x .
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 8/18
Mundo de Bloques
Reor denamiento de operadores3
La implementación del planificador busca minimizar la necesidad de reordenar
operadores. Esto se logra como consecuencia de la manera en que se
seleccionan las sub-metas y del agrupamiento de operadores en torno a estas, lageneración de estos grupos es fundamental para el reordenamiento, entre otras
cosas.
La necesidad de realizar reordenamientos se puede dar como segundo paso a
las unificaciones de operadores. Cuando el planificador determina que un par de
operadores son unificables debe tomar en cuenta relaciones que se dan entrelos grupos de operadores a los que los operadores a unificar pertenecen.
El principal interés al realizar un reordenamiento es el de dar lugar a un sub-plan
(un plan que alcanza algunas submetas) ordenado (un plan en el que los
operadores no tienen conflictos entre sí, ni conflictos con sus precondiciones).
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 9/18
Mundo de Bloques
Linearización del plan4
La última acción realizada por el planificador es la
generación de un plan lineal . Las mismas estrategias
que permitieron reducir los reordenamientos durante
laplanificación hacen que esta etapa sea muy
transparente.
Consiste simplemente en recorrer el grafo de
operadores en el orden correcto y agregar los
operadores a la lista final.
El plan generado por esta etapa puede o no ser
completo en el sentido de que como consecuencia del
principio de mínimo compromiso es probable que
existan aún operadores parcialmente instanciados.
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 10/18
Mundo de Bloques
En un conjunto de bloques dispuestos sobre una mesa. Los bloquespueden ser apilados, pero sólo uno puede descansar directamente sobre
otro. Un manipulador puede levantar un bloque a la vez y posicionarlo en
otra posición, ya sea encima de la mesa o de otro bloque. El objetivo es
encontrar los pasos a seguir para llegar de una configuración o estado inicial
de pilas a un estado final deseado.
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 11/18
Mundo de Bloques
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 12/18
Plan: se define como una estructura de datos constituida
por un conjunto de restricciones para el ordenamiento de los
pasos
Soluciones: una solución es un plan que un agente puede
ejecutar y garantizar el logro de la meta. Sólo los planes
enteramente concretizados, totalmente ordenados,
constituyen soluciones
Or den total: en el que los planes están formados por una
sola lista de pasos
Planificación No Lineal
Conceptos Básicos
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 13/18
Planificación No Lineal
Planificación No Lineal o de Or den Parcial
En la planificación no lineal, no existe linealidad en el orden de resolución de
sub-objetivos y su orden de ejecución.
Las técnicas se basan en una búsqueda regresiva sobre un espacio de planes.
El planificador navega a través de este espacio de planes, seleccionando encada caso el mejor plan (según un conjunto de criterios) a expandir. El proceso
finaliza cuando se encuentra un plan en el que todos los sub-objetivos han sido
resueltos y no existen conflictos entre las acciones del mismo.
Inteligencia Artificial

5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 14/18
Planificación mediante operadores concretizados parcialmente
Planificación No Lineal
POP no se ocupa de las
restricciones de enlace
variables, hay que llevar un
registro de las listas de enlace
y unificar las expresiones
pertinentes en el momento
adecuado. Para manejar
posibles amenazas hay tres
métodos:
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 15/18
Métodos P.O.P
1
Resolver en este
momentoutilizando una
restricción de
igualdad
2
Resolver en este
momentomediante una
restricción de
desigualdad
3
Resolver
posteriormente
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 16/18
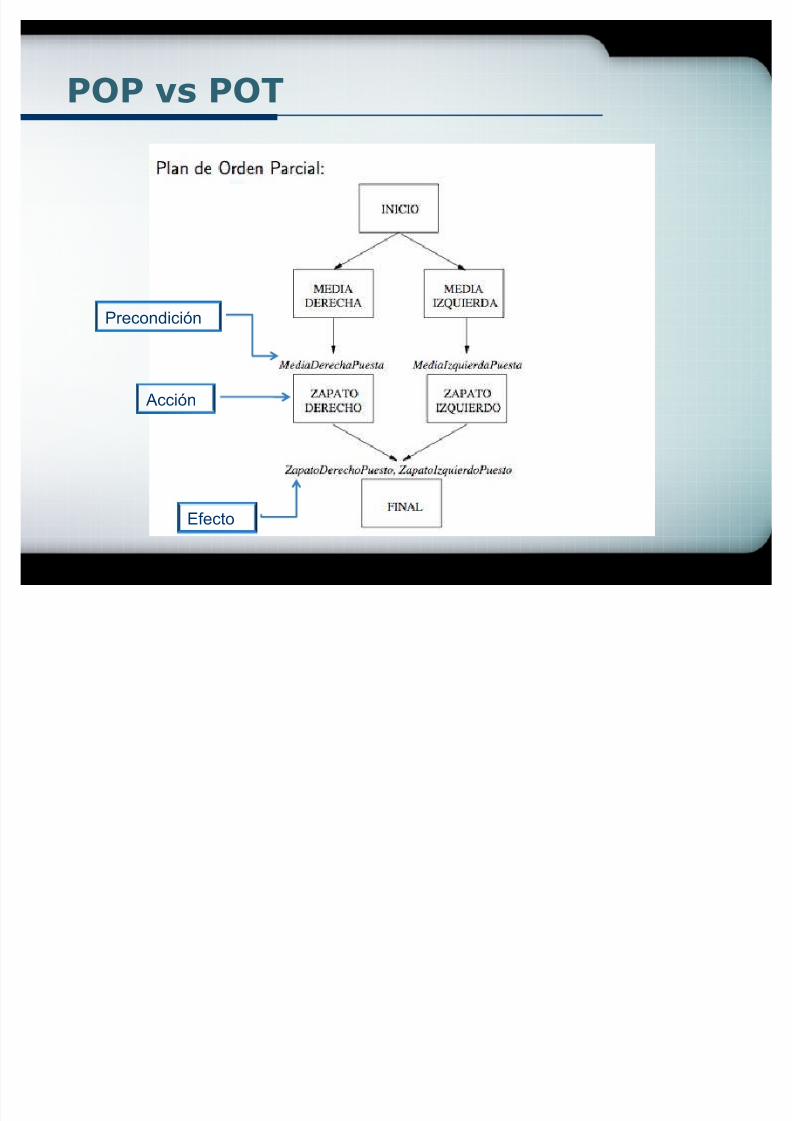
POP vs POT
Precondición
Acción
Efecto
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 17/18
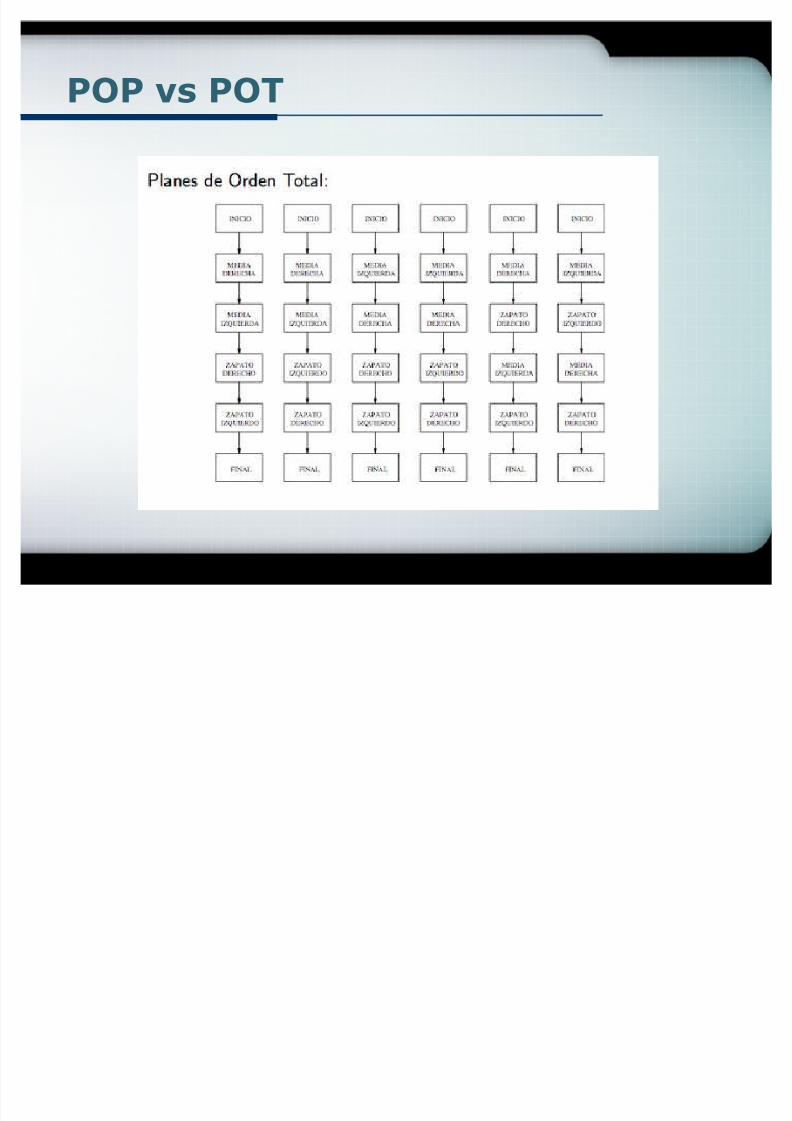
POP vs POT
Inteligencia Artificial
5/12/2018 Exp Planificacion - slidepdf.com
http://slidepdf.com/reader/full/exp-planificacion 18/18
LOGOSección S