estudio de un modelo de rueda sin cÁmara neumÁtica …
TRANSCRIPT

ESTUDIO DE UN MODELO DE RUEDA SIN CÁMARA NEUMÁTICA PARA
MOTOCICLETA
CRISTIAN FELIPE MORALES SUAREZ
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLOGICA, DEPARTAMENTO DE INGENIERIA Y
TECNOLOGIA MECANICA PROGRAMA DE INGENIERIA MECANICA
BOGOTÁ D.C. 2016
ESTUDIO DE UN MODELO DE RUEDA SIN CÁMARA NEUMÁTICA PARA
MOTOCICLETA
CRISTIAN FELIPE MORALES SUAREZ
Trabajo de grado para optar al Título de Ingeniero Mecánico,
Director: M.Sc JOHN FORERO CASALLAS
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLOGICA, DEPARTAMENTO DE INGENIERIA Y
TECNOLOGIA MECANICA PROGRAMA DE INGENIERIA MECANICA
BOGOTÁ D.C. 2016

3
NOTA DE ACEPTACIÓN
____________________________
____________________________
____________________________
____________________________
______________________________ PRESIDENTE DE JURADO
______________________________
JURADO
______________________________ JURADO
BOGOTÁ D.C. 2016

4
DEDICATORIA
A mi madre, Olga Suárez, por estar presente en todos los momentos y que gracias a sus sacrificios y a su enorme valentía fue la fundadora del proyecto que hoy ya se ve en sus últimos escalones, mil gracias. A mi padre, porque que su apoyo fue importante para ir avanzando en los proyectos propuestos, mil gracias.
A mis hermanos Andrés, Miguel y Nicolás por ser partícipes de este proyecto de múltiples maneras.

5
AGRADECIMIENTOS En primer lugar quiero agradecer a mi familia porque el apoyo y la confianza que me brindaron fueron incondicionales y muy importantes. A Víctor Ruiz Rosas, Docente de la Universidad Distrital Francisco José de Caldas, por sus aportes a éste proyecto y por ser la persona que me ha guiado académicamente y que gracias a sus enseñanzas y a su confianza me ha permitido explorar lo interesante de la investigación.

6
CONTENIDO
pág.
1. PLANTEAMIENTO DEL PROBLEMA……………………………………..14
1.1. ESTADO DEL ARTE…………………………………………………….14
1.2. JUSTIFICACIÓN…………………………………………………………19
2. OBJETIVOS…………………………………………………………………..20
2.1. OBJETIVO GENERAL…………………………………………………..20 2.2. OBJETIVOS ESPECIFICOS……………………………………………20
3. MARCO TEÓRICO…………………………………………………………..21
3.1. NEUMÁTICOS…………………………….……………………………...21 3.1.1. Neumáticos para motocicleta……………………………….…………..23 3.2. MATERIALES HIPERELASTICOS…………………………………….24 3.2.1. Modelos Mooney-Rivlin y Neo-Hookean ….……………...…………..26 3.3. CARGAS EN LAS RUEDAS…………………………………………….28
4. METODOLOGIA………………………………………………….…………..32
4.1. MODELAMIENTO GEOMÉTRICO DE RUEDAS PARA
MOTOCICLETA………………………………………………….………32
4.1.1. Prototipo de rueda convencional…………………….…………………33 4.1.2. Prototipo de rueda sin cámara neumática…………………………….34
4.2. MATERIALES HIPERELASTICOS .…………………………………...34
4.3. CARGAS EN LAS RUEDAS………………………….…………………35
4.3.1. Cargas en una condición estática………………………………………36

7
4.3.2. Cargas bajo una condición dinámica….……………………………….36
4.4. SIMULACIONES………………………...……………………………….39
4.4.1. Deformaciones totales bajo una condición estática………………….40 4.4.2. Desplazamientos radiales bajo una condición estática………………41
4.4.3. Deformaciones totales bajo una condición dinámica………………...42
5. RIGIDEZ EN LAS RUEDAS………………………………………………...45 6. CONCLUSIONES…………………………………….………………………51
7. BIBLIOGRAFIA…………………………………………….…………………52

8
LISTA DE TABLAS
pág.
Tabla 1. Parámetros cifrados en los neumáticos necesarios para una construcción geometría básica………...…………………………………………...23
Tabla 2. Parámetros generales de la rueda convencional……..…..……………….34
Tabla 3. Coeficientes de los modelos de materiales usados en el estudio de la rueda de Michelin …….……………………………………………………………...36
Tabla 4. Pesos de los cuerpos individuales….…………………………………...37
Tabla 5. Valores de los factores para determinar la fuerza longitudinal…..…...38 Tabla 6. Parámetros configurados para las simulaciones……………………….39

9
LISTA DE FIGURAS
pág.
Figura 1. Elementos estructurales tipo panel …………………………………..15 Figura 2. Prototipo de rueda Tweel de Michelin®..…….…………………………15 Figura 3.Partes principales del radio de la rueda Tweel…………………………16 Figura 4. Modelo tridimensional en elementos finitos de la rueda Tweel de Michelin® ……………………………………………………………………………..17 Figura 5. Rueda Air-Free Concept de Bridgestone®…………………………….18 Figura 6. Estadísticas del parque automotor de vehículos tipo motocicleta en Colombia…………………………………………..………………………………….19 Figura 7. Elementos que componen un neumático………………………………22 Figura 8. tipificaciones grabadas en los neumáticos………………………….….22 Figura 9. Representación de la curvatura en la banda de rodamiento en los neumáticos para motocicleta………………………………………………………..23 Figura 10. Ángulo de inclinación en una motocicleta (Camber angle)……..…..24 Figura 11. Curva típica de esfuerzo-deformación en materiales que obedecen la ley de Hooke………………………………………………………………………….24 Figura 12. Curva de esfuerzo- deformación en materiales con un comportamiento no lineal …………………………………………………………...25 Figura 13. Comparación entre los ángulos de inclinación y ángulos de deslizamientos que experimenta un automóvil y una motocicleta……………...28 Figura 14. Representación de la curvatura en la banda de rodamiento en los neumáticos para motocicleta…………………………………………………..……28 Figura 15. Metodología planteada para el desarrollo del proyecto…................32 Figura 16. Modelo de rueda convencional………………………………………...33 Figura 17. Modelo de Rueda Sin Cámara Neumática con Perfil Curvo………..35 Figura 18. Modelo de Rueda Sin Cámara Neumática con Perfil Recto…….…35

10
Figura 19. Localización del centro de gravedad en el conjunto motocicleta-pasajeros……………………………………..……………………………………….36 Figura 20. Deformación total en la rueda convencional aplicando una carga vertical ………………………………………………………………………………...40 Figura 21. Deformación total en la rueda sin cámara neumática con perfil curvo, aplicando una carga vertical………………………………………………………...40
Figura 22. Deformación total en la rueda sin cámara neumática con perfil recto, aplicando una carga vertical………………………………………………………...41 Figura 23. Comparación de los desplazamientos verticales frente a una carga Fy para las alternativas de ruedas sin cámara neumática con los modelos Mooney Rivlin y Neo-Hookean……………………………………………………..41 Figura 24. Comparación de los desplazamientos verticales frente a una carga vertical para la rueda convencional y sin cámara neumática……………………42 Figura 25. Deformación total en la rueda convencional aplicando una carga vertical y una longitudinal……………………………………………………………43 Figura 26. Deformación total en la rueda sin cámara neumática con radios de perfil curvos aplicando una carga vertical y una longitudinal……………………43 Figura 27. Deformación total en la rueda sin cámara neumática con radios de perfil recto aplicando una carga vertical y una longitudinal…………………...…44 Figura 28 Desplazamiento vertical para distintas fuerzas longitudinales en las ruedas, convencional y sin cámara neumática con el modelo Mooney-Rivlin, sin estabilizar……………………………………………………………………………..46 Figura 29. Desplazamiento vertical para distintas fuerzas longitudinales en las ruedas, convencional y sin cámara neumática con el modelo Mooney-Rivlin, sin estabilizar……………………………………………………………………………..47 Figura 30. Obtención de la fuerza longitudinal a partir del torque máximo generado en el motor………………………………………………………………..48 Figura 31. Deformación total en la rueda convencional con las condiciones: Fx= 380 N, Fz= 1650N y un factor de amortiguamiento…………………………49 Figura 32. Deformación total en la sin cámara neumática con radios de perfil curvo con las condiciones: Fx= 380 N, Fz= 1650N y un factor de amortiguamiento……………………………………………………………………..49

11
Figura 33. Deformación total en la sin cámara neumática con radios de perfil curvo con las condiciones: Fx= 380 N, Fz= 1650N y un factor de amortiguamiento…………………………………………………………………….50

12
NOMENCLATURA
factor de rigidez
factor de forma
valor pico de la función
compresibilidad del modelo
factor de curvatura
fuerza longitudinal fuerza lateral
fuerza vertical o normal
fuerza vertical o normal nominal
modulo cortante
invariantes de deformación
invariantes de distorsión
relación de cambio volumétrico
relación térmica volumétrica
deformación volumétrica elástica k deslizamiento longitudinal modulo volumétrico
longitud inicial del material
My resistencia la rodamiento Mz momento auto-alineante
radio de la rueda
radio de la rueda con carga

13
coeficiente de Poisson
volumen del material
densidad de energía de deformación
peso de la motocicleta
, peso del conductor y pasajero
alargamientos principales
alargamientos principales de distorsión
coeficiente de expansión térmica isotrópica ángulo de inclinación
ángulo de deslizamiento

14
Capítulo 1
PLANTEAMIENTO DEL PROBLEMA Las ruedas son una parte principal de todo vehículo, permiten el desplazamiento del mismo debido a la rodadura en la carretera, son, igualmente, la interfaz entre el vehículo y el suelo para la transmisión de cargas y desplazamientos verticales, asociados al peso y las discontinuidades superficiales presentes en la vía. Una rueda, está compuesta esencialmente por dos partes principales: el rin que es la parte rígida que se une al eje de transmisión de movimiento y contiene al neumático, en él se concentran las cargas asociadas al peso y los desplazamientos, por lo que requiere materiales de alta capacidad de absorción de carga, generalmente metálicos (aleaciones de aluminio). El neumático es la parte que entra en contacto con el suelo y permite el desplazamiento del vehículo a partir de la rodadura obtenida por la fricción entre el material del neumático y el suelo, es fabricado en un gran porcentaje en materiales de tipo elastomérico, lo que le brinda la capacidad de adaptarse a la forma del terreno. Entre el rin y el neumático se forma la cámara neumática, que contiene aire a presión para garantizar la uniformidad del comportamiento en la rueda. Sin embargo, el uso del aire tiene inconvenientes asociados a pérdidas parciales o permanentes del volumen de gas, por efecto de la temperatura, el peso, la porosidad de los materiales y las rasgaduras del neumático que se pueden eventualmente presentar. 1.1. ESTADO DEL ARTE En las últimas décadas han surgido investigaciones en donde se busca eliminar el problema de la cámara neumática, mediante el estudio de nuevos prototipos de ruedas para vehículos de pista doble (automóviles de 4 ruedas) que permitan suprimir las pérdidas de aire que se generan por la presencia de la cámara neumática. En (1) se propone la eliminación de la cámara neumática reemplazándola por elementos estructurales hiperelásticos tipo panel con alta resistencia a la fatiga, basados en la distribución de la deformación, con lo cual buscan obtener una baja concentración de esfuerzos como respuesta a cargas uni-axiales. Los estudios fueron realizados bajo un código de elementos finitos en ABAQUS encontrado, entre otras cosas, que los prototipos C y F presentan bajas concentraciones de esfuerzos locales por lo que la resistencia a la fatiga en estos diseños es mejor con respecto a los demás; sin embargo al considerar el aporte de masa de cada panel, en los prototipos C y F, encuentran que el panel tipo C tiene una masa menor que el panel tipo F, por lo tanto considerando la resistencia a la fatiga y el aporte de masa el panel tipo C presenta una mejor respuesta frente a desplazamientos verticales.

15
Figura 1: Elementos estructurales tipo panel (1).
En investigaciones patrocinadas por la empresa Michelin®, se ha venido desarrollado el modelo de rueda sin cámara neumática Tweel, figura 2.
Figura 2: Prototipo de rueda Tweel de Michelin® (2).
En presencia de altas velocidades de rodamiento en las ruedas se considera la hipótesis de que la rueda puede presentar señales de resonancia en los radios, lo cual genera que sea un factor crítico en los parámetros de diseño. En (2) mediante análisis de elementos finitos se propone modificaciones de los parámetros geométricos en los radios la rueda tweel en condiciones de alta velocidad, encontrando que las dimensiones la curvatura, el espesor, el ancho y la curvatura interna de los radios, figura 3, influyen en los valores de las frecuencias y amplitudes en las vibraciones.

16
Figura 3: Partes principales del radio de la rueda tweel, modificado de (2).
El valor del espesor del radio puede afectar la amplitud de vibración, pero no tiene efectos significativos en las frecuencias. La presencia de la curvatura en el radio genera un impacto en las frecuencias naturales así como en las amplitudes y frecuencias de vibración, con respecto al ancho encuentran que el valor no influye considerablemente en sus frecuencias o amplitudes, no obstante de que un valor pequeño genera un incremento en todos los modos excepto para el primero. Finalmente encuentran un valor adecuado para la curvatura interna del radio con lo cual logran reducir la amplitud de vibración al máximo considerando que éste parámetro afecta drásticamente las amplitudes de vibración pero no tienen un fuerte efecto en las frecuencias. Las ruedas sin cámara neumática son una solución viable al problema que genera la presencia de la cámara de aire. Las configuraciones geométricas planteadas requieren de un material con unas propiedades elásticas específicas, pues los radios estarán constantemente en estado de tensión y compresión debido a la entrada y salida en la zona de contacto, generando un fenómeno de pandeo en los radios. Lo anterior es una de las principales causas de las vibraciones que se presentan durante el rodamiento. Basados en un modelo de rueda tridimensional, figura 4, y usando como comparación, un poliuretano caracterizado por medio del modelo hiperelástico Marlow, en (3) se trabajó en los cambios de propiedades mecánicas y en la respectiva caracterización teórica de un material hiperelástico utilizado en la rueda tweel de Michelin® en condiciones de: carga-deformación en un estado estático, vibración de los radios, fuerza de reacción del suelo cuando se experimentan altas velocidades de rodamiento, además de estudiar la energía perdida por el impacto con obstáculos. La propiedad del material modificada fue el módulo cortante en una relación de ± 25%, obteniendo en total 6 modelos de materiales caracterizados por medio de los modelos hiperelásticos de Mooney-Rivlin y Neo-Hookean.

17
Figura 4: Modelo tridimensional en elementos finitos de la rueda Tweel de Michelin® (3).
En el estudio de carga-deflexión encontraron que al aumentar el modulo cortante en el material la rigidez de la rueda aumenta y como consecuencia la deflexión vertical frente a una serie de cargas disminuía. En general la rueda con el modelo Neo-Hookean presenta una rigidez significativamente más baja con respecto al Mooney-Rivlin. Para la vibración en las radios encuentran que la amplitud incrementa cuando las propiedades son cambiadas, de forma general en modelo de Marlow presenta amplitudes de vibraciones más bajas mientras que el Neo-Hookean presenta las más altas, éstos resultados se presentan cuando no existe cambio en el módulo cortante. Cuando el módulo cortante cambia en ± 25% se tiene que:
Configurando los radios con el modelo Mooney-Rivlin encuentran que las amplitudes de vibración son mayores cuando se modifica a -25% el módulo cortante, mientras que las amplitudes son menores cuando se modifica a +25 %.
Configurando los radios con el modelo Neo-Hookean encuentran que las amplitudes de vibración son mayores cuando no se modifica el módulo cortante, mientras que las amplitudes son menores cuando se modifica a +25 %.
De forma general, encontraron que al cambiar las propiedades del módulo cortante sin modificar el módulo volumétrico, el modelo del material tiene como respuesta incrementar o disminuir su rigidez. Lo anterior se evidencio en la pendiente de la curva esfuerzo-deformación, mayor pendiente cuando el modulo cortante se incrementa y una pendiente que disminuía cuando el módulo cortante se reducía. Las modelos de los materiales obtenidos, al modificar sus propiedades, fueron aplicados en dos partes principales de la rueda: los radios y el ring; con lo cual obtuvieron que la rueda experimentaba

18
un comportamiento mecánico específico, para cada configuración, dependiendo de las condiciones establecidas en las simulaciones. Bridgestone® ha trabajado en un prototipo, air-free tire concept, que busca eliminar la cámara de aire remplazándola por medio de la organización de elementos estructurales flexibles, figura 5. Los radios de la rueda están fabricados con una resina termoplástica que se vuelve flexible cuando se calientan adaptándose a una variedad de formas y se endurecen cuando se enfría; lo anterior permite que los materiales puedan ser reciclados. La primera generación de este concepto de rueda obtuvo como resultado un peso nominal de 100 Kg y una velocidad máxima de 6 Km/h, las condiciones para la segunda generación mejoraron al soportar, ahora, vehículos con peso de 410 Kg y una velocidad máxima de 60 Km/h (4).
Figura 5: Rueda Air-Free Concept de Bridgestone® (4).
Para materiales tipo hiperelásticos, los cuales son considerados no lineales, la relación esfuerzo-deformación se deriva a partir de una función de densidad de energía de deformación por unidad de volumen de un espécimen, y no de un factor constante como el módulo de Young para materiales con comportamiento lineal (5). Algunos modelos se han planteado en este último sentido, en (6) y (7) se estableció la caracterización de modelos de materiales elastómeros e hiperelásticos de forma experimental y mediante elementos finitos, los dos estudios se basaron en modelos teóricos.
Algunas metodologías para el estudio por elementos finitos de ruedas para vehículos han sido desarrolladas; en (8) se presenta el análisis estático y transitorio de una rueda para un vehículo de pista doble; en (9) se desarrolló una comparación del comportamiento mecánico entre una rueda convencional y otra sin cámara neumática. En ambos estudios se estableció como condición de frontera, la restricción que ofrece el suelo en contacto con la rueda

19
1.2. JUSTIFICACIÓN La tendencia en la adquisición de la motocicleta como vehículo personal es un fenómeno que está en crecimiento globalmente (10). En Colombia, según el ministerio de transporte en el anuario del 2014 (11), existe un crecimiento en las unidades totales del parque automotor en los vehículos tipo motocicletas. Las cifras reportadas indican que desde el año 2002 hasta el 2008 se presentó un crecimiento alrededor de las 450.000 unidades, mientras que en el intervalo de los años 2010-2014 el crecimiento fue cerca de 320.000 unidades, figura 6, sin embargo se espera que en los próximos años ésta tendencia continúe.
Figura 6: Estadísticas del parque automotor de vehículos tipo motocicleta en Colombia.
En investigaciones de ruedas sin cámara neumática la tecnología ha avanzado lo suficiente tanto así que ya se exponen prototipos de esta rueda, tweel y Air-Free concept, fabricadas por Michelin® y Bridgestone®, respectivamente; sin embargo no se encuentran estudios publicados que indiquen algún tipo de avance de prototipos de ruedas para motocicletas, por lo tanto, y teniendo en cuenta el alto crecimiento del uso de los vehículos de pista sencilla (vehículos de 2 ruedas, motocicletas) se considera importante iniciar un análisis del comportamiento de cargas esfuerzo-deformación que permitan determinar la posibilidad de una alternativa de rueda para motocicleta sin cámara neumática.

20
Capítulo 2
OBJETIVOS
2.1. OBJETIVO GENERAL
Analizar el comportamiento mecánico de un modelo de rueda sin cámara neumática para motocicleta bajo la condición de rodamiento puro. 2.2. OBJETIVOS ESPECÍFICOS
Modelar y simular por medio del software SolidWorks y Ansys-Workbench v14.0 versión académica el modelo de rueda sin cámara neumática. Determinar los parámetros cinéticos para una rueda de motocicleta bajo las condiciones de rodamiento puro. Establecer una comparación de los resultados obtenidos con un prototipo de rueda convencional para motocicleta.

21
Capítulo 3
MARCO TEÓRICO
El caucho es un polímero el cual se obtiene mediante un proceso de extracción denominado “sangría” el cual consiste en extraer el látex de árboles como el Hevea brasiliensis. Charles Goodyear descubrió, en 1839, que el caucho crudo puede volverse duro al calentarse junto con la presencia del azufre, lo anterior es un proceso que se denomina vulcanizado. Desde entonces, el caucho pasó a ser un material con múltiples campos de aplicaciones (12). El neumático como parte de la rueda hace su aparición en 1888 cuando veterinario e inventor escocés, John Boyd Dunlop, rediseño el primer neumático con cámara de aire mediante un tubo de goma inflado y recubierto por una lona para su protección para después pegarlos a la rueda, hasta entonces, los neumáticos se fabricaban en goma maciza lo que generaba una marcha no tan suave. La composición estructural de una rueda común está dispuesta por dos elementos principales: el rin y el neumático. De forma general, un estudio de una rueda requiere de literatura acerca de las funciones que cumple cada uno de los elementos que la conforman, los modelos teóricos con los que se logran caracterizar los materiales y los modelos matemáticos, empíricos o semi-empiricos que permiten determinar la cinética y cinemática del rueda de acuerdo a las condiciones a las que se expone el automóvil cuando experimenta distintas condiciones de rodamiento.
3.1. NEUMATICOS
El neumático es el elemento que entra en contacto con el suelo permitiendo así, por efecto de la fricción entre los dos, el rodamiento del vehículo. Además, debido a las propiedades mecánicas del material con el que se fabrica en gran parte tiene la capacidad de actuar como el primer amortiguador del sistema y ser el elemento que permite disipar y trasferir parte de la energía generada durante las condiciones de rodamiento al vehículo. La evolución del neumático ha permitido que se incluya, en su composición, componentes los cuales permiten solucionar problemas como la pérdida del gas debido a las porosidades del material, inestabilidades que se presentan en condiciones de rodamiento en altas velocidades o en presencia ángulos de deriva y baja rigidez. En la figura 7 se encuentran señalados los componentes que conforman un neumático.

22
Figura 7: Elementos que componen un neumático (13).
La capa interior o el innerliner es un elemento que permite mejorar los problemas a las pérdidas de gas debido a las filtraciones que puedan ocurrir por las posibles imperfecciones del material. Las pestañas ajustan el neumático al rin. Los cinturones estabilizadores y las paredes laterales le brindan estabilidad al neumático, además, los cinturones estabilizadores, ofrecen rigidez y mejora la pisada en la banda de rodamiento gracias a que son fabricados en acero. La tela de cuerpo resiste el aire a presión y soporta la carga ajustando todo el conjunto a la forma del terreno. La banda de rodamiento es la parte que entra en contacto con el suelo, le brindan rigidez a la rueda, resisten la fricción entre el neumático y la superficie y facilita la adherencia en superficies secas y mojadas.
Figura 8: tipificaciones grabadas en los neumáticos (14).

23
Debido a la variedad de vehículos que existen actualmente en el mercado, se han establecido tipificaciones de referencias con las cuales se logra identificar algún tipo de neumático especifico. En la figura 8 se muestran los principales parámetros que se encuentran marcados en la parte lateral del neumático. Para la construcción geometría de los neumáticos basados en las tipificaciones mostradas en la figura 8, es suficiente con las que hacen referencia al: ancho de la llanta, relación de aspecto (altura/ancho), y diámetro del aro, en la tabla 1 se definen cada uno de los parámetros.
Tabla 1: Parámetros cifrados en los neumáticos necesarios para una construcción geometría básica.
Cifra Significado
225 Indica la medida del ancho del neumático en mm
70 Relación de altura respecto al ancho del neumático en porcentaje, también denominado relación de aspecto
17 Diámetro del ring en pulgadas
3.1.1. Neumáticos para motocicleta. La motocicleta, al ser un vehículo de pista sencilla (dos ruedas orientadas en una misma línea de dirección), sus neumáticos tienen una forma distinta con respecto a los que utilizan los vehículos de pista doble (vehículos de 4 ruedas como el automóvil).
Los neumáticos de una rueda para motocicleta tienen una característica especial, la huella de contacto va a disminuir como resultado de una curvatura en la banda de rodamiento, figura 9.
Figura 9: Representación de la curvatura en la banda de rodamiento en los neumáticos
para motocicleta.

24
La curvatura va a permitir que la motocicleta experimente, por lo general en condiciones de rodamiento en las curvas, lo que se denomina ángulos de inclinación, figura 10.
Figura 10: Ángulo de inclinación (Camber angle) en una motocicleta (15).
3.2. MATERIALES HIPERELASTICOS Los materiales convencionalmente utilizados como los aceros son caracterizados a partir de ensayos mecánicos con los cuales se logra obtener una curva característica de tipo lineal dentro de su zona elástica, es decir, siguen un comportamiento obedeciendo la ley de Hooke, figura 11. Entre tanto existen materiales que se identifican por tener una respuesta no lineal en su deformación frente a una serie de cargas aplicadas, por lo que se denominan materiales no lineales, figura 12.
Figura 11: curva típica de esfuerzo-deformación en materiales que obedecen la ley de
Hooke (16).

25
Figura 12: Curva de esfuerzo- deformación con un comportamiento no lineal (16).
Modelos típicos de materiales hiperelásticos (17) tienen la forma polinómica, expresión (1), basada en la función de densidad de energía de deformación:
∑ ( )
( ) ∑
( )
(1)
Donde y son coeficientes que se determinan experimentalmente.
Mientras que y son las invariantes de deformaciones y están definidas por los alargamientos principales, ecuaciones (2, 3, 4).
( ) ( )
( ) (2)
( ) ( )
( ) (3)
( ) .
/ (4)
En la ecuación 4, J es la relación de cambio volumétrico, para materiales
incompresibles . Los Alargamientos principales establecen la relación entre la longitud del material deformado y la longitud del material sin deformar para cada una de las direcciones principales, ecuación (5).
(5)
Donde se define como el cambio en la longitud divido por la longitud original. La deformación volumétrica elástica se puede establecer con J que se
definió como la relación volumétrica y la relación térmica volumétrica , expresión (6).

26
( ) (6)
Donde depende del coeficiente de expansión térmica isotrópica y la temperatura, ecuación (7).
(7)
La energía de deformación puede ser una función expresada por medio de los alargamientos principales, formula (8), o de las invariantes de deformación, formula (9).
( ) (8)
( ) (9)
Debido a que se considera un material incomprensible, los términos asociados
a la distorsión1 y volumétricos pueden ser separados, obteniendo las ecuaciones (10,11).
( ) ( ) (10)
( ) ( ) (11)
Donde es la energía necesaria para la distorsión y corresponde al
cambio de volumen del elemento. Son los alargamientos principales de distorsión, expresión (12).
(12)
Y son las invariantes de distorsión (13).
(13)
Relaciona la compresibilidad del modelo, si es cero, entonces todos los debería ser cero y el modelo es completamente incompresible. El valor de se relacióna con el módulo volumétrico, mientras que los valores de se
relacionan con el modulo cortante del material.
3.2.1. Modelo de Mooney-Rivlin y Neo-Hookean. Mooney-Rivlin es un modelo basado en las invariantes de deformación, éste es derivado de la forma polinomial cuando se hace N=1, ecuación (14),
1 Originalmente para este término se utiliza la palabra en inglés deviatoric, al no tener una
traducción directa al español se prefirió utilizar la palabra distorsión.

27
( ) ( )
( )
(14)
Mientras que el modelo de Neo-Hookean, expresión (15), puede ser visto como
un modelo simplificado del Mooney Rivlin haciendo , éste es el más simple de los modelos hiperelásticos y a menudo es utilizado en ausencia de datos precisos del material.
( )
( )
(15)
Como se mencionó arriba, los parámetros y están relacionadas con el
modulo volumétrico y el modulo cortante del material expresiones (16), (17), respectivamente.
( ) (16)
( ) (17)
Para el Mooney Rivlin esta relación es, ecuaciones (18), (19).
( ) (18);
(19)
Y para el Neo-Hookean está dado por las expresiones (20) y (21).
( ) (20);
(21)
Se puede obtener la comprensibilidad relativa de un material a partir de la
relación del módulo volumétrico y modulo cortante , También se puede expresar por medio del coeficiente de Poisson mediante la ecuación (22).
(22)
El coeficiente de Poisson permite establecer la compresibilidad del material, si
no existen contraciones laterales en el modelo, si el modelo es incompresible, es decir no existe cambio de volumen bajo cargas y cuando
se presentan valores típicos de materiales elásticos como los metales.

28
3.3. CARGAS EN LAS RUEDAS.
Existen múltiples modelos para el estudio del comportamiento cinético y cinemático para ruedas de vehículos de pista doble (18) . Para el análisis de ruedas para vehículos de pista sencilla fue utilizado el modelo semi-empírico desarrollado por Pacjekca originalmente propuesto para ruedas de automóvil (19). Debido a la diferencia en su estructura geométrica, los factores que permiten encontrar las magnitudes de las diferentes fuerzas que interactúan en las ruedas cambian. En particular, la motocicleta presenta un estado de equilibrio teniendo como resultado un ángulo de inclinación (entre 50° y 55°) mayor al que presenta un vehículo de pista doble, mientras que un automóvil presenta un ángulo de deslizamiento mayor al de la motocicleta, figura 13, (20), (21).
Figura 13: Comparación entre los ángulos de inclinación y ángulos de deslizamientos
que experimenta un automóvil y una motocicleta (20).
Para las fuerzas estáticas y dinámicas presentes sobre una motocicleta la SAE estándar J670e propone idealizar la rueda, es decir como si no existiría deformación y calcular todas las fuerzas y torques generadas en el punto C.
Figura 14: fuerzas y torques aplicados sobre el actual punto de contacto, según la SAE
J670e.

29
En la figura 14: La fuerza longitudinal , fuerza lateral , fuerza vertical o
normal N, resistencia la rodamiento My y momento auto-alineante Mz son las fuerzas y torques que puede experimentar una rueda de motocicleta debido a una situación en particular, además de un ángulo de inclinación (camber angle) , figura 10, que puede presentarse cuando la motocicleta experimenta una
inclinación en su recorrido. Para encontrar cada uno de los factores mencionados se desarrolló un conjunto de fórmulas semi-empiricas denominadas fórmulas mágicas (Pacejka Magic Formula).
Para encontrar la magnitud de la fuerza longitudinal , se establece que:
{ [ (
( ))]} (23)
Dónde:
es el valor pico de la función,
es el factor de forma,
es el factor de rigidez,
es el factor de curvatura y
k es el deslizamiento longitudinal.
Cada uno es estos coeficientes se obtienen por medio de:
( ) (24)
( ) ( ( )) (25)
(26)
( ) ( ) (27)
( ) (28)
Los factores , , , , , , , , y que aparecen en la ecuaciones (13-16) son coeficientes que se determinan mediante pruebas experimentales. La magnitud de la fuerza lateral se determina por medio de (29):
2 0 .
( )/1 0
. ( )/13 (29)

30
Dónde:
( ) (30)
{ ( )
} (31)
{ ( ) ( } (32)
( ) (33)
[
( (( ) ]
( )
(34)
( ) (35)
( ) (36)
(
) (37)
De la misma forma los parámetros , , , , , , , ,
, , , , , , , , que aparecen en las ecuaciones
(30-37) se determinan experimentalmente, mientras que y son el ángulo de
deslizamiento2 y ángulo de inclinación respectivamente. La ecuación (29) permite encontrar la magnitud de la fuerza lateral experimentando condiciones de ángulo de deslizamiento y ángulo de inclinación puro, es decir sin la presencias de otras fuerzas. Los resultados que se obtienen al utilizar este modelo bajo esta condición, parece ser bastantes exactos para ángulos de inclinación mayores a 30° pero limitando el ángulo de deslizamiento a 6°. La fuerza lateral no se produce en todo el centro de la huella de contacto, por lo general actual a una distancia retrasada a éste punto, ésta distancia se denomina avance. El producto de la fuerza lateral por el avance genera un momento autoalineante Mz. La magnitud del momento auto-alineante Mz se determinado por medio de (38):
(38)
2 El ángulo de deslizamiento también se denomina ángulo de deriva: es el ángulo que forma la
dirección de desplazamiento y el plano de intersección de la rueda.

31
Dónde:
[ 0
2 . ( )/31
√ ] (39)
,
( ( ( ( ) ))- (40)
(41)
( ) ( | |
) (42)
.
/ ( ) ( | |
) (43)
( ) 2
( ) ( )
3 (44)
(44)
*( ) ( ) | |+ √ (45)
Los coeficientes, , , , , que aparecen en las expresiones (39-45) se determinan experimentalmente. es el radio de la rueda y se puede obtener a partir de la información suministrada en los neumáticos, por ejemplo para una rueda 160/70 R16 el radio será de 203 mm.

32
Capítulo 4
METODOLOGÍA
El desarrollo del proyecto se planteó en 5 etapas fundamentales, figura 15.
Figura 15: Metodología planteada para el desarrollo del proyecto.
4.1. MODELAMIENTO GEOMÉTRICO DE RUEDAS PARA MOTOCICLETA
Como base para el modelamiento geométrico de las ruedas se tomaron dos prototipos, el primero, basado en una rueda convencional utilizando sus principales características constructivas, aquí se estudió un modelo de rueda 130/70 R17 (22).
Modelado
• Modelado de los prototipos a analizar por medio del software CAD solidworks.
Materiales
• Identificación y caracterización de los materiales de las ruedas a analizar.
Cargas
• Determinación de las características cinéticas presentes en la rueda.
Simulación
• Simulación de las ruedas mediante el software FEA Ansys-Workbench.
Resultados
• Análisis y comparación de los resultados obtenidos.

33
El segundo, se basó en el prototipo obtenido por (2), éste se modifica con el fin de obtener una geometría característica adaptada a una rueda para motocicleta. 4.1.1. Prototipo convencional
Para el modelamiento se tomaron como parámetros principales las tipificaciones estandarizadas para una rueda 130/70 R17 y el diámetro del eje asegurando que las dimensiones externas e internas fueran lo más aproximado a los estándares del mercado (22).
Para el rin, especificaciones secundarias como: las perforaciones para el disco de freno fueron incluidas considerándolas importantes debido a que pueden ser geometrías donde existan concentraciones de esfuerzos. Entre tanto, las dimensiones, la geometría y el número de aspas se modelaron partiendo de una aproximación a un rin existente en el mercado.
Para el neumático, dada la complejidad del modelamiento CAD y el costo computacional que representa modelarlo y simularlo con todos los elementos que lo componen,(13), incluyendo la cámara neumática, se asumió el neumático como un único sólido fabricado con un material elastómero (no se incluyeron todas las capas que le dan resistencia y rigidez), la cámara neumática se reemplazó por un modelo sólido elástico. Lo anterior permitió, por un lado, reducir los tiempos de simulaciones y por otro obtener resultados aproximados a la literatura previa,(23), (24), (25). Como resultado se desarrolló un modelo de rueda convencional para motocicleta (figura 16) con las especificaciones mostradas en la tabla 2.
Figura 16: Modelo de rueda convencional.

34
Tabla 2: Parámetros generales de la rueda convencional.
Diámetro del rin 431.8mm
Diámetro del eje 20.64mm
Ancho de la huella de contacto 130 mm
Diámetro exterior 614 mm
4.1.2. Prototipo de rueda sin cámara neumática
A diferencia del prototipo tradicional, el diseño de la rueda sin cámara neumática para motocicleta se compuso por tres elementos principales, el rin, los radios flexibles y la banda de rodadura. Para la banda de rodadura los parámetros como el diámetro exterior y la curvatura necesaria para experimentar los ángulos de inclinación se mantuvieron iguales con respecto a la rueda convencional. El grabado que se presenta en las huellas de contacto de las ruedas no se tuvo en cuenta, debido a que no representa mayor influencia en los resultados de esfuerzos y deformaciones en las condiciones de análisis de la rueda. Los radios flexibles son los elementos que remplazan la cámara neumática, por lo tanto éstos tienen la capacidad de adaptar la rueda a distintos terrenos. Para el modelamiento de los radios se tuvieron en cuenta la geometría y las dimensiones de los radios. Para la forma geométrica se consideró el diseño de (2), donde obtuvieron unas características en el perfil del radio, mientras que las dimensiones se establecieron de acuerdo con la relación de aspecto que se deseaba tener como punto de partida para la rueda. Para una de las características de los radios flexibles se toman dos propuestas, la primera, planteada por (2) , la cual tienen una curvatura en el perfil y la segunda se asume un perfil recto. Como hipótesis se consideró que cada radio permite transferir la energía de rodamiento hacia el rin, el modelamiento del rin se desarrolló basado en la misma idea, por lo tanto, y contrario al rin convencional, para su diseño se modelaron una serie de “radios” que captan el flujo de energía transmitida y la dirigen directamente al eje sin generar, en lo posible, concentraciones de esfuerzos alrededor de la rueda. Finalmente se llegó a unos diseños preliminares de unas ruedas sin cámara neumática los cuales permitieron realizar las primeras simulaciones, figuras 17,18. En este modelo, de la misma forma que en el prototipo tradicional, no se han considerado todos los elementos con el fin de establecer de forma directa los esfuerzos y deformaciones directamente en los radios flexibles.

35
Figura 17: Modelo de Rueda Sin Cámara Neumática con Perfil Curvo.
Figura 18: Modelo de Rueda Sin Cámara Neumática con Perfil Recto.
4.2. MATERIALES HIPERELÁSTICOS
En (3) se determinaron las constantes de un poliuretano por medio de los modelos de Mooney-Rivlin y Neo-Hookean, con distintas consideraciones, para ser aplicadas a los radios flexibles y la banda de rodadura del prototipo de rueda de Michelin.

36
Tabla 3: Coeficientes de los modelos de materiales usados en el estudio de la rueda de Michelin. Las unidades están en MPa.
Cte. Mooney-Rivlin Neo-Hookean Neo-Hookean*
(Banda de rodadura)
C10 -7.74556701 4.91297384 0.833
C01 16.0586381 0 0
D1 0.0124440504 0.0210561422 0.1241384
G0 16.62614218 9.82594768 1.666
K0 160.7193748 94.98416096 16.1
ʋ 0.45 0.45 0.45
4.3. CARGAS EN LAS RUEDAS. Para las comparaciones propuestas fueron elegidas dos etapas, la primera,
una carga normal debida a la carga asociada al peso del conjunto motocicleta-usuario y una segunda etapa con una fuerza longitudinal necesaria para vencer la inercia y entrar en condiciones de rodamiento puro. La norma SAE J670e (26) propone idealizar la rueda asumiendo que no existe ninguna deformación y calcular todas las fuerzas y torques generados en un punto en común, éste se ubica en todo el centro de la huella de contacto de la rueda. Para todos los casos analizados, la localización del centro de gravedad de todo el conjunto se asumió en el centro de la motocicleta, figura 19, además se tomó la motocicleta como un conjunto rígido; lo que significó que todas las cargas se vieron reflejadas en las reacciones sin que existiera algún mecanismo que permitiera alguna disipación de la energía de rodamiento.
Figura 19: Localización del centro de gravedad en el conjunto motocicleta-pasajeros.

37
4.3.1. Cargas en una condición estática En la condición estática la motocicleta experimenta una fuerza resultante vertical, expresión (46), debida al peso de la motocicleta, el peso del conductor y del acompañante, tabla 4. El peso de la motocicleta es obtenido a partir del promedio de motocicletas que utilizan el tipo de rueda modelada, por lo general vehículos con cilindraje entre 180-300 cc (27)-(29).
Tabla 4. Pesos de los cuerpos individuales.
Conjunto Peso (Kg)
Motocicleta ( ) 150
Conductor ( ) 90
Pasajero ( ) 90
Total 330
Por lo tanto:
( )
(46)
Como consecuencia de las consideraciones planteadas, la carga total se distribuye en partes proporcionales a cada una de la ruedas; por lo tanto la
carga en cada rueda es igual a la mitad de la fuerza , es decir, 1650 N.
4.3.2. Cargas en bajo una condición dinámica. Para que la rueda entre en condiciones de rodamiento puro es necesario eliminar el estado de inercia; para lo cual se requiere de una fuerza longitudinal
, por lo tanto para esta etapa la rueda experimentó dos fuerzas, la primera, la fuerza vertical o normal que se determinó en la sección anterior y la segunda,
la fuerza que se puede obtener por medio de la ecuación (23).
{ [ (
( ))]} (23)
Para el deslizamiento longitudinal k que aparece en las ecuaciones (23,25), en (30) es determinado mediante la expresión (46):
(46)

38
Donde y corresponden a los valores del radio de la rueda con carga y sin carga respectivamente. En la sección 4.1 se estableció que el radio de la rueda
es de 307 mm y se determinó a partir de la simulación de la carga estática, en la cual se obtuvo una deformación vertical de 4.2163 mm en toda la rueda, por lo anterior el radio con carga de la rueda es de 302.78 mm. Resolviendo la ecuación (46) con los datos anteriores se tiene que el deslizamiento longitudinal es de:
En (31) realizaron pruebas para un modelo de rueda 160/70 ZR17 en las cuales obtuvieron las magnitudes para cada uno de los coeficientes, finalmente se estableció un método para determinar los coeficientes de ruedas con distintas especificaciones. Primero, si se consideran los parámetros de
curvatura, rigidez y forma iguales; entonces , y permanecen constantes. Entre tanto para el valor que caracteriza el pico de la función, , se encontró que: la relación entre los valores de los picos de la fuerza longitudinal y la fuerza lateral se debe mantener para los demás
coeficientes, con lo cual los valores y son de 1.381 y -0.04143, respectivamente, para una rueda 120/70; mientras que para una rueda con
características 180/55 y son de 1.355 y -0.0603. Considerando que las magnitudes para los coeficientes fueron obtenidas para ruedas con geometrías que varían en un rango de 20-60 mm en sus anchos y 15% en su relación altura/ancho; la diferencia de los valores tienen una variación máxima
de 0,2 para y de 0,06 para por lo que se asumieron los datos de la rueda 120/70 para el prototipo de rueda 130/70 R17. Los parámetros que definen la fuerza longitudinal se presentan en la tabla 5.
Tabla 5: valores de los factores para determinar la fuerza longitudinal.
2278.65
1.6064
11.692909
0.0268
0.0137338
Al remplazar los datos anteriores en la ecuación (23) se obtiene como resultado
una magnitud en la fuerza longitudinal igual a 576 N.

39
4.4. SIMULACIONES
En éste proyecto se utilizaron las condiciones definidas en la norma SAE J670e, la cual propone ubicar las fuerzas en el centro de la huella de contacto, como se plantea en (26). Las simulaciones fueron implementadas en el software Ansys-Workbench®v14.0 versión académica. Una forma general de la configuración en el programa para las simulaciones de las dos etapas se muestra en la tabla 6.
Tabla 6: Parámetros configurados para las simulaciones.
Para simulaciones con materiales hiperelásticos con grandes deformaciones, elementos tipo hexaédricos con 8 nodos generan una buena convergencia al problema, sin embargo, Ansys ofrece una alternativa de elementos tipo tetraédricos los cuales brindan buenos resultados cuando se trabaja con geometrías complejas (32). La discretización de los modelos, debido a la geometría, fue realizada mediante elementos tetraédricos, los radios flexibles, la banda de rodadura y la coraza se configuran con este tipo de elemento.
Tipo Conjunto
Materiales
aleación de aluminio Rin
Mooney-Rivlin Radios flexibles
Neo-Hooekan Radios flexibles
Neo-Hooekan* Banda de
rodadura y coraza
Malla
Elementos tetraedros Radios flexibles y
banda de rodadura
Elementos Hexaédricos Coraza
Por defecto Rin
Cargas Fuerzas nodales Según la SAE
estándar J670e
Soportes Soporte fijo En el eje del rin

40
4.4.1. Deformaciones totales bajo una condición estática.
Al aplicar la carga vertical se obtuvo en la rueda convencional que la
distribución de la deformación se concentra en la periferia de la huella de contacto, figura 20; entre tanto para los modelos de ruedas sin cámara neumática, con el modelo Mooney Rivlin, la distribución se genera alrededor de los radios flexibles (figuras 21,22), éste comportamiento se lograr identificar de una mejor manera en los radios con un perfil curvo lo que indica que el perfil recto genera una mayor rigidez en la rueda.
Figura 20: Deformación total en la rueda convencional aplicando una carga vertical.
Figura 21: Deformación total en la rueda sin cámara neumática con perfil curvo,
aplicando una carga vertical.

41
Figura 22: Deformación total en la rueda sin cámara neumática con perfil recto,
aplicando una carga vertical.
En general, se evidencia que la deformación máxima, en la rueda convencional, se concentra en la huella de contacto mientras que en las ruedas sin cámara neumática se presenta en los radios flexibles, lo anterior indica que el objetivo de remplazar la cámara neumática por radios flexibles genera buenos resultados frente a una carga estática. Acerca de las magnitudes de las deformaciones, el perfil recto genera una rueda más rígida con respecto a la convencional, mientras que el perfil curvo presenta una mejor amortiguación.
4.4.2. Desplazamientos radiales bajo una condición estática
Figura 23: Comparación de los desplazamientos verticales frente a una carga para las
alternativas de ruedas sin cámara neumática con los modelos Mooney Rivlin y Neo-Hookean.

42
La respuesta del comportamiento de la rueda sin cámara neumática con los modelos Mooney Rivlin y Neo-Hookean al aplicar una carga vertical se obtuvieron mediante la comparación de los desplazamientos verticales, de forma similar a las curvas de esfuerzo-deformación en los materiales. Como resultado se encontró que las pendientes de desplazamiento para el modelo Mooney Rivlin, en las alternativas con perfiles curvo y recto, son más grandes con respecto a las del modelo Neo-Hookean. Lo anterior indica un comportamiento con una mayor rigidez cuando la pendiente es más grande y una relación directamente proporcional con el módulo cortante, figura 23.
Figura 24: Comparación de los desplazamientos verticales frente a una carga vertical
para la rueda convencional y sin cámara neumática.
Para el análisis del desplazamiento vertical de la ruedas convencional y sin cámara neumática, tomando como base el modelo de Mooney-Rivlin debido a la rigidez que proporciona este modelo, se obtuvo que la rueda con perfil curvo presento un comportamiento similar a una rueda convencional para cargas verticales menores a 1000N. El patrón de comportamiento con respecto a la
geometría de los perfiles permanece casi igual al presentar una mayor rigidez en la rueda de radios con perfil recto, figura 24.
4.4.3. Desplazamientos radiales bajo una condición dinámica.
La distribución y las magnitudes de deformaciones al aplicar, ahora, una fuerza
longitudinal son de interés considerando el estado de inercia que el conjunto motocicleta-usuarios tiene antes de entrar en la condición de rodamiento puro. El comportamiento en la distribución de la deformación continúa presentado el mismo patrón en la rueda convencional al concentrarse alrededor de la huella
de contacto intentando deformarse en la dirección de la fuerza , figura 25. Con respecto a las ruedas sin cámara neumática; la distribución de deformación se presenta alrededor de toda la rueda obteniendo que los radios

43
flexibles y la banda de rodadura trabajen en conjunto evitando deformaciones excesivas por concentraciones, contrario a la rueda convencional. Para la rueda con los radios de perfil recto se tiene la misma tendencia al generar, ésta forma de geometría, una mayor rigidez con respecto al perfil curvo (figuras 26,27). Entre tanto los valores más grandes de deformación se presentan en las ruedas sin cámara neumática, sin embargo estas magnitudes se pueden suponer aceptables al considerar, primero, la relación de volumen de material hiperelástico que tienen respecto a la rueda convencional y segundo que la capacidad de distribución de energía de los radios flexibles es mejor que la del neumático.
Figura 25: Deformación total en la rueda convencional aplicando una carga vertical y una
longitudinal.
Figura 26: Deformación total en la rueda sin cámara neumática con radios de perfil
curvos aplicando una carga vertical y una longitudinal.

44
Figura 27: Deformación total en la rueda sin cámara neumática con radios de perfil recto
aplicando una carga vertical y una longitudinal.
En general, con base en los resultados en las dos etapas, se encontró que las deformaciones son generadas de manera uniforme alrededor de la rueda sin cámara neumática para los dos modelos Mooney-Rivlin y Neo-Hookean, lo que indica que la alternativa de una configuración sin cámara neumática y radios flexibles genera buenos resultados para condiciones de cargas estáticas y de rodamiento puro, para el prototipo tradicional se observa que las deformaciones están concentradas alrededor de la huella de contacto debido a que la configuración de la rueda es mucho más rígida lo que impide una mejor distribución de las deformaciones.

45
Capítulo 5
RIGIDEZ EN LAS RUEDAS
La rigidez es un parámetro importante en las ruedas, éste depende de factores como el material, las membranas que se ubican en el neumático y la presión, entre otros. En la sección 2 se consideró, como punto de partida, un modelo de rueda el cual se supuso sólido sin la presencia de alguna capa que brinde algún tipo de rigidez con el fin de determinar el comportamiento directamente en el neumático, en los radios flexibles y por el costo computacional, logrando resultados aproximados con respecto a las distribuciones. Para obtener una rueda convencional con una rigidez típica se propuso mediante controles no-lineales en Ansys Workbench®v14.0 versión académica estabilizar la rueda. Las estabilizaciones no-lineales son usadas comúnmente en problemas que presentan dificultad en su convergencia debido a grandes desplazamientos para incrementos pequeños de cargas, para lo anterior se agregan amortiguadores artificiales con el fin de reducir los desplazamientos en los nodos con grados de libertad que tiendan a generar inestabilidad en el modelo. Existen dos métodos con los cuales se logra la estabilización, relación de energía de disipación y factor de amortiguamiento (32). Para cualquiera de los dos métodos se aplican coeficientes los cuales se recomiendan que tengan valores entre 0 y 1, al aplicar factores mayores que 1 el modelo tendrá una respuesta más rígida. Para obtener una rigidez adecuada se planteó encontrar la magnitud de desplazamiento vertical teórico para parámetros de fuerzas establecidas y, posteriormente, mediante iteraciones encontrar un factor de amortiguamiento el cual permita generar una rigidez en la rueda con la que el desplazamiento vertical computacional sea igual al teórico. La ecuación (23) permitió encontrar la fuerza longitudinal que experimenta la motocicleta en función de parámetros determinados experimentalmente. Por
medio de las series de Taylor se tiene que la función se aproxima mediante la fórmula (47), (33).
∑( )
(47)
Al resolver la ecuación (47) entorno a valores de se obtienen
aproximaciones muy cercanas a , por lo que la es igual a siempre y
cuando se tomen valores de 0. Si se resuelve para N=3 se tiene que:
(48)

46
Donde en radianes, al resolver la expresión (48) se
obtiene que , obteniendo un error experimental igual a 0.85%, ecuación (49).
(49)
Por lo que la aproximación para este caso se consideró aceptable. Por lo tanto,
al solucionar la formula (23) donde los términos con se resuelven por medio de las serie de Taylor y despejando el deslizamiento longitudinal k se tiene la expresión (50).
(
)
(50)
El deslizamiento longitudinal se definió en la formula (46), entonces remplazando en la expresión (50) y despejando se obtuvo una fórmula que permite encontrar el radio teórico de la rueda con carga con base en unas condiciones establecidas, ecuación (51).
5. ( (
)
) (51)
En la ecuación (23) , y son parámetros que fueron obtenidos en la sección 4.3 y que están en función de la fuerza vertical la cual tiene una
magnitud de , mientras que la fuerza longitudinal tomará valores entre con el fin de encontrar el desplazamiento vertical al aplicar distintos valores de torque en la rueda.
Figura 28: Desplazamiento vertical para distintas fuerzas longitudinales en las ruedas,
convencional y sin cámara neumática con el modelo Mooney-Rivlin, sin estabilizar.

47
La gráfica, de la figura 28, es el resultado del desplazamiento vertical al aplicar la carga normal junto con una fuerza longitudinal que varía en su magnitud; como resultado se obtuvo una diferencia en las magnitudes de deformaciones, aunque evidenciando un comportamiento similar en sus pendientes. Los valores de desplazamiento en la rueda con perfil recto continúa presentado una mayor rigidez en comparación con las otras ruedas; el modelo convencional presenta un comportamiento casi vertical lo que indica que la deformación radial en una rueda convencional no presenta variación al cambiar la magnitud de la carga longitudinal. El modelo de perfil de radio curvo sigue presentando los valores más altos de desplazamiento. El comportamiento de los resultados anteriores es el producto de analizar las ruedas sin ningún elemento que permita brindarle rigidez al modelo. La rigidez típica en una rueda convencional
está determinada por medio del coeficiente , obtenido a partir de pruebas experimentales. Como punto de comparación, se graficó el comportamiento de desplazamiento vertical teórico para una rueda convencional con una rigidez
típica , como resultado se logró tener un comportamiento con una pendiente más inclinada similar a la obtenida cuando solo actúa la carga normal.
Figura 29: Desplazamiento vertical para distintas fuerzas longitudinales en las ruedas, convencional y sin cámara neumática con el modelo Mooney-Rivlin, estabilizadas Para cada valor de fuerza longitudinal se encontró un factor de amortiguamiento con el cual se satisface el desplazamiento vertical teórico en la rueda convencional, posteriormente los factores de amortiguamiento obtenidos se aplicaron a los modelos de la rueda sin cámara neumática con el fin de que la rigidez radial en los modelos sin cámara neumática sea igual a la de una rueda convencional, los resultados se muestran en la gráfica de la figura 29. Al aplicar los factores de amortiguamiento se logró una convergencia entre las pendientes teórica y experimental en la rueda convencional, entre tanto la pendiente de los modelos sin cámara neumática experimentaron una inclinación similar, esto es el resultado de generar la misma rigidez en todos los modelos. Con respecto a la magnitud en las deformaciones se obtuvo que el modelo con radios de perfil recto aun presenta los valores de deformación más

48
pequeños; para la rueda convencional, contrario a los resultados anteriores, se encontró que presenta las magnitudes más altas en las deformaciones para todos los valores de cargas longitudinales, mientras que la rueda con radios de perfil curvo tiene una respuesta más rígida, con respecto a las primeras simulaciones, cuando se le aplica la fuerza longitudinal.
En general, teniendo en cuenta que los tres modelos tienen una rigidez típica de una rueda convencional, se encontró que los modelos de ruedas propuestas sin cámara neumática presentaron una condición más rígida con respecto una rueda convencional cuando experimentan una fuerza longitudinal, lo anterior indica que los radios flexibles generan en la geometría de la rueda un estado de rigidez mayor que la cámara neumática a una rueda convencional.
La fuerza longitudinal máxima que la motocicleta puede adquirir permaneciendo en un estado de inercia, se obtiene al considerar que las motocicletas de la gama seleccionada pueden generar un torque máximo de 30N.m y que la relación de transmisión de velocidades es de 38/14, en la primera marcha. La ecuación (52) permite obtener el torque de salida en la rueda, figura 30.
(50)
Dónde: es el torque generado desde el motor y la razón es la relación de transmisión. Al solucionar la expresión se encuentra que la motocicleta puede generar un torque máximo en la rueda de 82 N.m
Figura 30: Obtención de la fuerza longitudinal a partir del torque máximo generado en el
motor.
Al conocer la magnitud del torque que se genera en la rueda, se puede obtener
el valor de la fuerza longitudinal , pues , donde la distancia es el radio de la rueda. Resolviendo la formula anterior se obtiene que una motocicleta del cilindraje seleccionado en éste proyecto puede
alcanzar una fuerza máxima de aproximadamente .
49
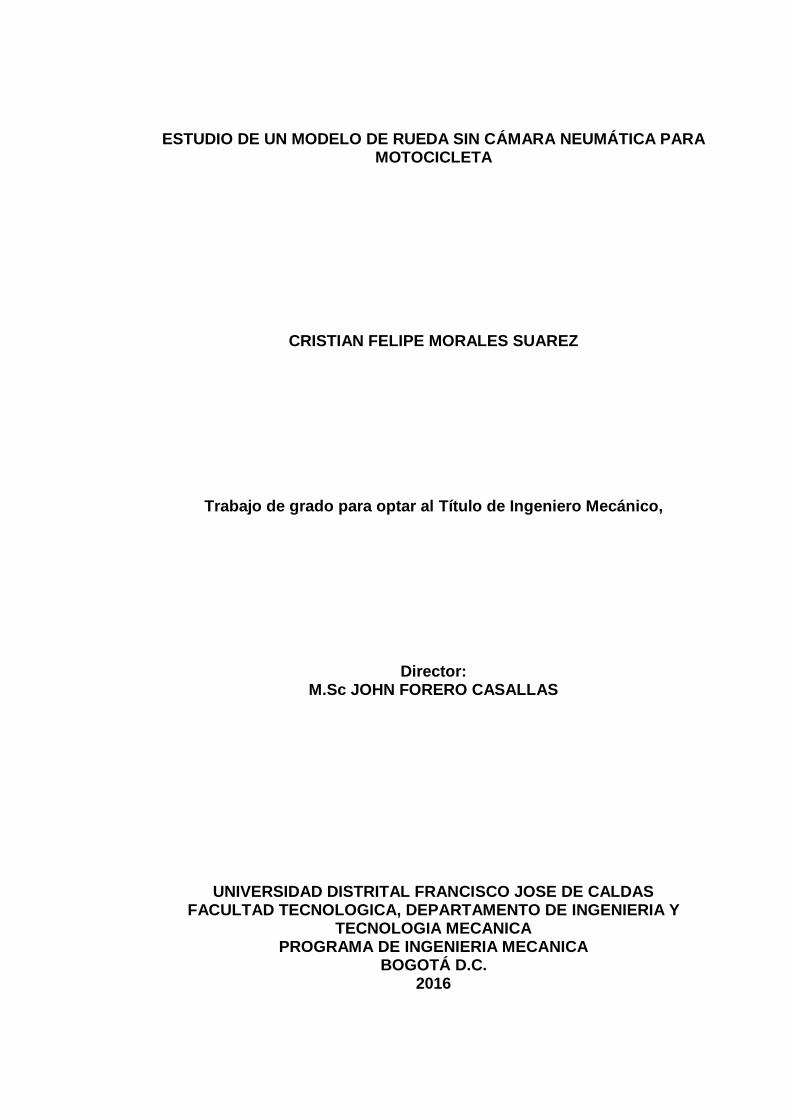
Las distribuciones en las deformaciones totales en las rueda aplicando: la
fuerza longitudinal obtenida (380 N), la fuerza vertical (1650 N) y el factor de amortiguamiento que brinda a una rigidez adecuada en estas condiciones, son analizadas ahora, encontrando que en la rueda convencional, figura 31, la localización de las deformaciones se concentran aún más alrededor de la huella de contacto; lo anterior es una respuesta a la rigidez que la rueda tiene producto de la estabilización aplicada.
Figura 31: Deformación total en la rueda convencional con las condiciones: = 380 N,
= 1650N y un factor de amortiguamiento.
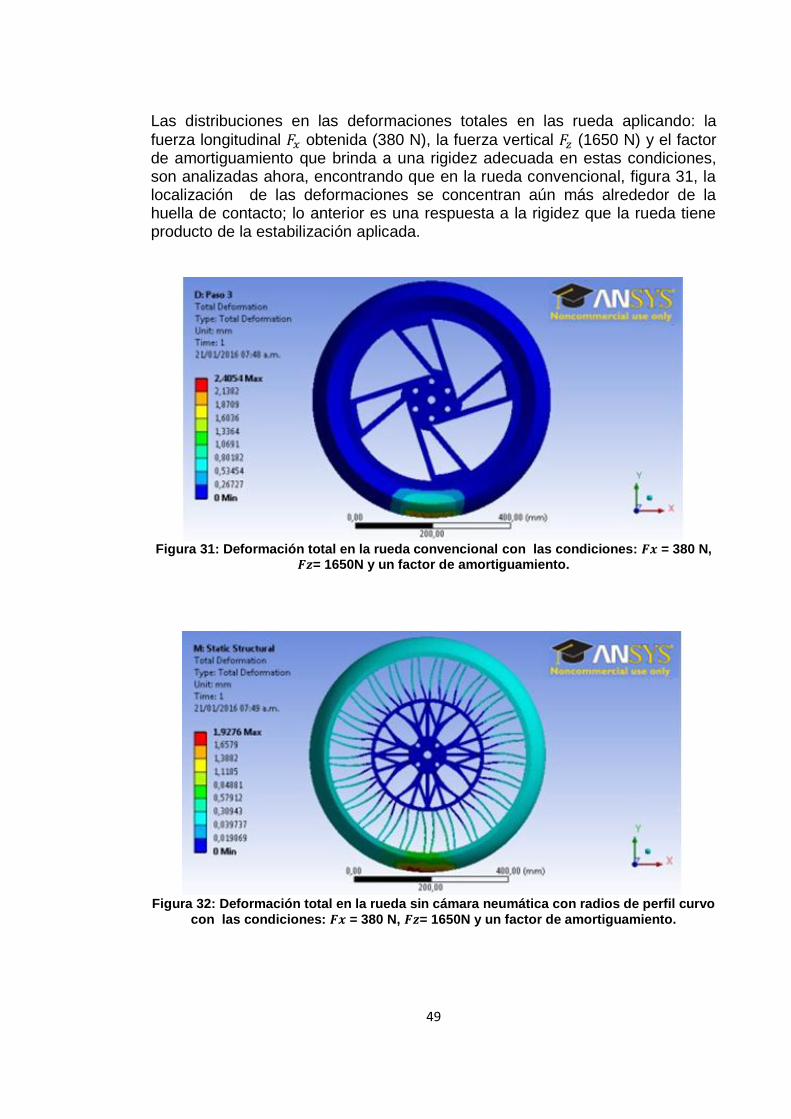
Figura 32: Deformación total en la rueda sin cámara neumática con radios de perfil curvo
con las condiciones: = 380 N, = 1650N y un factor de amortiguamiento.

50
Figura 33: Deformación total en la rueda sin cámara neumática con radios de perfil recto
con las condiciones: = 380 N, = 1650N y un factor de amortiguamiento.
Los resultados en las deformaciones en las ruedas sin cámara neumática, aplicando el modelo Mooney-Rivlin, presentan la misma tendencia con respecto análisis anteriores (figuras 32,33), sin embargo en la rueda con los radios de perfil recto se evidencia de una mejor manera la respuesta a la estabilización aplicada, lo que indica que efectivamente los radios con perfil recto proporcionan a la rueda un estado mayor de rigidez. La rueda con los radios con perfil curvo permiten una mejor distribución en las deformaciones, proporcionando una mayor amortiguación al sistema, no obstante se debe garantizar, con estudios posteriores, que dicha amortiguación no genere magnitudes altas en las amplitudes y frecuencias de vibraciones.

51
Capítulo 6
CONCLUSIONES
En este artículo se analizó el comportamiento mecánico estructural de una rueda sin cámara de aire para motocicleta basada en el modelo de Michelin y se establecieron puntos de comparación para definir su potencial uso. Se evidencia un modelo alternativo para ruedas de motocicleta sin cámara de aire potencialmente viable. Se requiere avanzar hacia la construcción de un prototipo experimental de rueda sin cámara neumática para ajustar los coeficientes necesarios para el modelo de Pacejka. Para el proceso de simulación fue necesario simplificar las condiciones de frontera con el de fin de obtener un costo computacional razonable. Se encontraron valores de estabilizaciones con los cuales se logra obtener valores típicos de rigidez en la rueda, obteniendo resultados de desplazamiento vertical comprables con los teóricos sin la necesidad de incluir capas adicionales que brinden rigidez en el modelo CAD.

52
Capítulo 7
BIBLIOGRAFIA
(1) J. Ju, D.-M. Kim, y K. Kim, «Flexible cellular solid spokes of a non-pneumatic tire», Compos. Struct., vol. 94, n.o 8, pp. 2285-2295, jul. 2012.
(2) Ramachandran, Maya, «Nonlinear Finite Element Analysis of TWEEL Geometric Parameter Modifications on Spoke Dynamics during High Speed Rolling"», Msc Thesis, Clemsom University, 2008. (3) Narasimhan,Akshay, «A computational method for analysis of material properties of a non-pneumatic tire and their effects on static load deflection, vibration and energy loss from impact rolling over obstacles», MSc Thesis, Clemsom University, 2010
(4) Bridgestone Corporation, «Bridgestone Corporation Reveals Second Generation “Air Free Concept (Non-Pneumatic) Tire”», Bridgestone Corporation, 21-nov-2013. [En línea]. Disponible en: http://www.bridgestone.com/corporate/news/2013112101.html. (5) R. Jakel, «Analysis of hyperelastic materials with MECHANICA-Theory and Application examples», presentado en 2 nd SAXSIM | Technische Universität Chemnitz, Technische Universität Chemnitz, 27-abr-2010. (6) C. Nuñez y D. Celentano, «Caracterización Experimental Y Numérica De Compuestos Elastoméricos Utilizados En Disipadores De Energía», Mecánica Comput., vol. XXIV, n.o 3, pp. 391-412, 2005. (7) M. D. Riera, M. S. Soto, A. Gordillo, y J. M. Prado, «Modelización y simulación del comportamiento mecánico de materiales elastoméricos», Perspect. Investig. Sobre Mater. En Esp. En El Siglo XXI Congr. Nac. Mater., vol. 1, pp. 247-250, 2006 (8) T. Giurgiu, F. Ciortan, y C. Pupaza, «Static and Transient Analysis of Radial Tires Using ANSYS», en Recent advances in industrial and manufacturing technologies: proceedings of the 1st international conference on industrial and manufacturing technologies (INMAT ’13), Vouliagmeni, Athens, Greece, 2013, vol. 1, pp. 148-152. (9) Manibaalan. C, Balamurugan.S, Keshore, y Dr.Joshi.C.Haran, «Static analysis of airless tyres», Int. J. Sci. Res. Publ., vol. 3, n.o 8, ago. 2013.

53
(10) R.-J. Lin, K.-H. Tan, y Y. Geng, «Market demand, green product innovation, and firm performance: evidence from Vietnam motorcycle industry», J. Clean. Prod., vol. 40, pp. 101-107, feb. 2013. (11) Oficina Asesora de Planeación y Grupo de Planificación Sectorial, «Transporte en Cifras - Estadisticas 2014.pdf», Ministerio de Transporte, Colombia, 2014. (12) Mondragon Aguilar Jaime, «Hules.pdf». 2002. (13) G. Castro, «Materiales y Compuestos para la Industria del Neumatico - Materiales_y_Compuestos_para_la_Industria_del_Neumatico.pdf», Materiales y compuestos para la industria del neumático. [En línea]. Disponible en: http://campus.fi.uba.ar/file.php/295/Material_Complementario/Materiales_y_Compuestos_para_la_Industria_del_Neumatico.pdf. [Accedido: 23-abr-2016] (14) Á. V. Silva Ortíz y R. E. Samaniego Castro, «Análisis de Fuerzas del Tren Motriz en Vehículos Pesados», 2010.} (15) Pedrosa Dani, «Can’t get enough», View from the Back. [En línea]. Disponible en: https://viewfromtheback.com/tag/dani-pedrosa/. (16) W. D. Callister, Materials science and engineering: an introduction, 7th ed. New York: John Wiley & Sons, 2007. (17) G. A. Holzapfel, Nonlinear solid mechanics: a continuum approach for engineering. Chichester ; New York: Wiley, 2000 (18) R. Rajamani, Vehicle Dynamics and Control. Boston, MA: Springer US, 2012. (19) H. B. Pacejka, Tyre and Vehicle Dynamics. Butterworth-Heinemann, 2006. (20) W. D. Versteden, «Improving a tyre model for motorcycle simulations», MSc Thesis, Technische Universiteit Eindhoven, Eindhoven Netherlands, 2005. (21) R. Lot, «A Motorcycle Tire Model for Dynamic Simulations: Theoretical and Experimental Aspects», Meccanica, vol. 39, n.o 3, pp. 207-220, jun. 2004. (22) Continental Reifen Deutschland, «Technical Manual Motorcycle and Scooter Tires, June 2015». jun-2015. (23) Manibaalan. C, Balamurugan.S, Keshore, y Dr.Joshi.C.Haran, «Static analysis of airless tyres», Int. J. Sci. Res. Publ., vol. 3, n.o 8, ago. 2013. (24) T. Giurgiu, F. Ciortan, y C. Pupaza, «Static and Transient Analysis of Radial Tires Using ANSYS», en Recent advances in industrial and manufacturing technologies: proceedings of the 1st international conference on

54
industrial and manufacturing technologies (INMAT ’13), Vouliagmeni, Athens, Greece, 2013, vol. 1, pp. 148-152. (25) A. Kongo Kondé, I. Rosu, F. Lebon, O. Brardo, y B. Devésa, «On the modeling of aircraft tire», Aerosp. Sci. Technol., vol. 27, n.o 1, pp. 67-75, jun. 2013. (26) «J670: Vehicle Dynamics Terminology - SAE International». [En línea]. Disponible en: http://standards.sae.org/j670_200801/. [Accedido: 21-feb-2016]. (27) Auteco, «Manual de garantía y Mantenimiento.», Medellin Colombia, 2013. (28) KTM-Sportmotorcycles, «Manual de Instrucciones 2014.», Mattighofen, Austria, 2014. (29) Incolmotos Yamaha, «Motocicletas Yamaha R3». [En línea]. Disponible en: http://www.incolmotos-yamaha.com.co/site/productos/motos/super-deportivas/R3. [Accedido: 22-abr-2016]. (30) J. Font Mezquita, J. F. Dols Ruiz, y Universitat Politècnica de València, Tratado sobre automóviles: tecnología del automóvil, vol. IV, 5 vols. Valencia: Universidad Politécnica de Valencia, 1997. (31) R. S. Sharp, S. Evangelou, y D. J. N. Limebeer, «Advances in the Modelling of Motorcycle Dynamics», Multibody Syst. Dyn., vol. 12, n.o 3, pp. 251-283, oct. 2004. (32) E. Madenci y I. Guven, The finite element method and applications in engineering using ANSYS, 2nd ed. New York: Springer, 2015. (33) L. Leithold y F. Mata González, El Cálculo. México: Oxford University Press, 1998.