escuela politÉcnica nacional facultad de ingenierÍa ... · josÉ rubÉn cedero romero tesis...
TRANSCRIPT

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
"INTRODUCCIÓN -A LA ESTIMACIÓN DE ESTADO EN OPERACIÓN DE,\ SISTEMAS ELÉCTRICOS DE POTENCIA"
JOSÉ RUBÉN CEDERO ROMERO
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE
INGENIERO ELÉCTRICO, CON ESPECIALIZACION
EN SISTEMAS ELÉCTRICOS DE POTENCIA
Quito, Agosto de 1985
Certifico que el presente trabajo
ha sido realizado en su totalidad
por el Sr. José Rubén Cedeño Rome_
ro.
r i
Ing/%bn"el ArguelloDIRECTOR DE TESIS

'AGRADECIMIENTO
- A mis padres, por todos sus sacrificios
- Al Ing. Gabriel Arguello Ríos, por su confianza y excelente direc_
' ción.
- A los señores profesores de la Facultad de Ingeniería Eléctrica,
por todas sus enseñanzas. . .
- Al Personal de la Dirección de Operación del SNI y del Centro de
Procesamiento de Datos de INECEL por su colaboración.
-"A la señorita Martha Valencia C. por su invalorable ayuda.
- A las personas que han contribuido con sus sugerencias en la rea-
lización del presente trabajo y a todas aquellas que durante mi'vj_
da estudiantil me han apoyado, . '

Í N D I C E
Pag,
CAPITULO I. INTRODUCCIÓN . .
1.1 . General i dades 1
1.2 La necesidad de la estimación de Estado en la Ope-
ración de un sistema eléctrico de potencia 3
1.3 Aspectos funcionales del proceso de estimación de
Estado 4
1.3.1 Análisis de las Mediciones 5
1.3.2 Función objetivo 6
1.3.3 Obtención del valor de-la .función de error y/su ca_
•racterística 7
1.3.4 Detecci ón de medi ci ones erróneas 9
1.3.5 Identificación de datos erróneos 10
1.4" Objetivo y Alcance del Trabajo "11
CAPITULO II TEORÍA DE ESTIMACIÓN DE ESTADO
2.1 Desarrollo Analítico de la Teoría de Estimación de
Estado por el método de los mínimos cuadrados pon-
derados 13
2.1.1 Modelo Lineal 14
2.1.2 Modelo No Lineal 17
2.2 Desarrollo Analítico de la Teoría de Detección e _I_
dentificación de errores de medición 19
2.2.1 Detección de Mediciones erróneas 20
2.2.1.1. Prueba de Hipótesis en el Análisis de Detección... 21

Pag,
2.2.2. Identificación de Mediciones Erróneas 23-
2.2.2.1. Valores esperados 24
2.2.2.2. Varianzas 25
2.2.2.3. Matriz Covarianza de los Residuos 28
2.2.2.4. Prueba de Hipótesis-en el Proceso de Identificación
de Mediciones Erróneas ,.30
2.2.3 Intervalos de Confianza 33
2.3. Consideraciones y Síntesis de la Teoría de Estima- .
ción de Estado • 35
2.4. Diagrama de Bloques del Modelo de Estimación '... 38
CAPITULO III ESTIMACIÓN DE ESTADO EN SISTEMAS ELÉCTRICOS DE
- POTENCIA.
3.1. Aplicación de la Teoría de Estimación de Estado en la
operación de sistemas eléctricos de Potencia 40
3.1.1. Algoritmo de la AEP (American Electric Power) 41
3.1.2. Algoritmo que utiliza como modelo de solución el mé-
todo de Newton-Raphson 42
3.2 Modelo del Estimador considerando diferente tipo de
mediciones 42
3.2.1. Algoritmo de la A.E.P. (Modelo Lineal) 43
3.2.2. Modelo No Lineal: Método de Newton-Raphson Formal... 49
3.2.3. Forma del Jacobiano (Modelo no lineal) 54
3.3. Observabilidad de la Red y Pseu'do mediciones 61
3.4. Determinación automática de la Topología de la Red -
en un Sistema de Potencia 64:

Pag,
3.5. Aplicaciones adicionales de la Teoría de Estimación -
de estado en sistemas eléctricos de potencia 67
3.6. El Flujo de Potencia Estocástico: Caso muy particular
de la teoría de estimación 72
3.7. Algoritmo de solución de estimación de estado en sis-
• temas de potencia 76
3.8. Diagrama funcional de bloques del proceso de simula-
ción y del algoritmo de estimación 81
CAPITULO IV EJEMPLOS"DE APLICACIÓN
4.1. Sistema Ward and Hale de 6 barras 85
4.1.1. Diagrama Unifilar '. 86
4.1.2. Características gerrerales- 86
4.1.3. Datos de lineas, transformadores y Cap/React 87
4.1.4. Datos de barras (caso base) 88
4.1.5. Solución del Flujo de Potencia Convencional 88
4.1.6. Casos de estudio en el análisis de estimación de esta_
do 89
- CASO 1. Análisis del Sistema de Medición considerar^
do diferente calidad del equipo utilizado.. 90
- Resultados del Programa Digital 97
- CASO 2. Aplicación del Criterio de redundancia en el
proceso de estimación de estado 102
- Resultados del Programa Digital 107
- CASO 3. Determinación del máximo número de datos e-
rróneos cuando se tiene un conjunto sobrede_
terminado de mediciones del sistema 113

Pag.
- Resultados del_Programa Digital 116
- CASO 4. Obtención de los mejores estimados utilizar^
do diferente grado de redundancia y porcen-
taje de errores moderados 126
- Resultados del programa digital 128
". . - CASO 5. Determinación del mínimo número de medicio-
nes para estimar el estado del sistema, COJT_
diderando los criterios dados de observabi-
lidad de redes 132
- Resultados del Programa Digital 134
•4.2. Sistema de Prueba de la AEP-IEEE de 14 barras 152
4.2.1. Diagrama unifilar ' 152
4.2.2. Características generales 152
2.4.3. Datos de líneas, transformadores y CAP/REACT 153
4.2.4. Datos de barras 154
4.2.5. Solución del flujo de potencia : 154
4.2.6. Análisis de los casos de estudio 156
- Resultados del Programa Digital 168
4.3. Sistema Nacional Interconectado ., 187
4.3.1. Diagrama Unifilar 187
4.3.2. Características generales 188
4.3.3. Datos de líneas, transformadores y CAP/REACT... 189'
4.3.4. Datos de barras 190
4.3.5. Solución del flujo y análisis de Estimación " 191
4.3.6. Resultados para las diferentes estimaciones 196
4.4. • Determinación de los parámetros de la curva entrada -
salida de algunas unidades térmicas 228
PSg.
4.4.1. Curva entrada-salida de la unidad No.3 de la central
Santa-Rosa '.'*... 229
4.4.2. Curva entrada-salida de la Unidad No.3 de la central
a vapor "Ing. Gonzalo Cevallos." 231
CAPITULO V .PROGRAMA DIGITAL DE'ESTIMACIÓN DE ESTADO DE'UN SI_S
TEMA ELÉCTRICO DE POTENCIA
5.1. Descripción del" Programa Digital 235
5.2. Descripción de las subrutinas • 238
5.3. Diagramas "de bloques y flujo del programa princi-
pal y subrutiñas 224
CAPITULO VI CONCLUSIONES Y RECOMENDACIONES
- Conclusiones . 263
- Recomendadones ; 269
ANEXOS:
Anexo' A Manual de uso del Programa Digital 271
Anexo B Conceptos Estadísticos 316
B-l Tipos de errores de medición 316.
B-2 Varianza ..- ,.; 319
B-3 Covarianza 319
B-4 Teoría de la Correlación 320
Anexo C Detalles y demostraciones Analíticas 323
C-l Instrumentación ; 323
C-2 Demostración.Analítica de los resultados de las
derivadas parciales utilizadas en la minimización de
la función de error (modelo Lineal) 326

'J
Pag,
C-3 Desarrollo analítico del modelo no lineal de es-
timación de estado .'... 328
C-4 Demostración analítica de la Covarianza delosva_
lores calculados correspondientes a las cantida-
des medidas :.... 334
C-5 Procedimiento de prueba para obtener el conjunto
de mediciones necesarias para estimar las cons-
tantes de la 'curva entrada-salida y filtro de e-
rrores de medición en el análisis de identifica-
ción y detección 336
Anexo D. Ejemplo demostrativo de la teoría de estimación de es_
tado en un sistema de 3 barras 341
Anexo E. Listados de los Programas Digitales 357
Referencias

CAPITULO I
1.1. GENERALIDADES
El continuo crecimiento de los sistemas de potencia con voltajes de
transmisión más elevados, más interconexiones, unidades generadoras
más grandes y los requerimientos cada vez más exigentes del usuario
sobre un servicio continuo y eficiente, han hecho que la operación
de un sistema de potencia aumente en complejidad.
El objetivo de operar un sistema de potencia es mantenerlo en estado
normal.con un conjunto de estrategias de control sobre el sistema, de
tal forma que el servicio al consumidor se lo realice con índices _a
decuados de seguridad, calidad y economía. Este proceso de control
se basa en información de tiempo real del sistema de potencia.
Los voltajes de barra, flujos de potencia en líneas de transmisión y
transformadores, producción de las unidades de generación del siste_
ma supervisado y valores de intercambio de potencia y energía con sus
sistemas interconectados son esencialmente los datos necesarios para
la supervisión y control del sistema. Esta información, ciertamente
puede ser obtenida por telemedición; enviando las correspondientes -
medidas de los diferentes lugares del sistema al centro de control
del mismo (sistema) y basado en ésta el operador deberá ejecutar las
acciones de control necesarias. Sin embargo, el operador del siste-
ma al recibir esta información, ¿Confiará en la veracidad de estos
datos?, ¿Hasta que punto esta sensación de confianza afectará en su
toma de decisiones?, ¿Podrá el operador del sistema, o en e] futuro

controles automáticos, tomar acciones de control apropiadas cuando
varios datos son perdidos o erróneos debido a un mal funcionamiento
del equipo de medición o sistemas de comunicación?.
La necesidad de dar respuesta a las preguntas anteriores, conducen a
la idea de encontrar un modelo que procese este conjunto de datos,
de tal forma que se pueda "obtener información confiable y completa -
de las variables de interés a pesar de que la información provenieji_
te del campo esté errónea o incompleta.
A fines de la década del 60 (debido a problemas serios que ocurrie-
ron en New York por _ falta de información) cobra fuerza la inve_s_
tigación en este campo3y es en este momento cuando aparece un modelo
aplicable a sistemas de potencia para análisis en tiempo real, el m\s_
mo que se lo ha denominado "ESTIMACIÓN DE ESTADO EN SISTEMAS DE PO
TENCIA".
De acuerdo a lo anteriormente mencionado, la Estimación .de . Estado
puede ser definida como un algoritmo para obtener el "mejor estimado"
de las variables de estado de un sistema de potencia. Varios méto-
dos han sido propuestos para obtener.la estimación de las variables,
a saber:
- Método de los Mínimos Cuadrados Ponderados.
- Solución de estimación utilizando un conjunto de Ecuaciones Inde-
pendientes, y;
- El filtro de Ka!man.
•J
.En el presente estudio se analizará el primer método, el mismo que se
basa en la minimización de una cierta función objetivo utilizando el
criterio estadístico de "ESTIMACIÓN POR MÍNIMOS CUADRADOS", eV cual
consiste en procesar un conjunto redundante de mediciones en tiempo
real para estimar el valor verdadero de las variables de estado, al
minimizar la suma de los'cuadrados de la diferencia entre el valor
medido y el calculado de una función.
1.2. LA NECESIDAD DE LA ESTIMACIÓN DE ESTADO EN LA OPERACIÓN DE UN
SISTEMA ELÉCTRICO DE POTENCIA
En un sistema de potencia, las variables de estado son las magnitu-
des de los voltajes y los ángulos de fase de los nodos o barra's del
sistema. Varias mediciones, son requeridas para estimar el funciona-
miento del sistema en tiempo_real, tanto para control de la seguri-
dad, como para realizar un buen control de la calidad y la economía
de la operación.
Las entradas a un estimador son múltiples y correlacionadas, es de-
cir, se consideran medidas en tiempo real de: magnitudes de voltaje,
potencias activas y reactivas en los nodos, flujos de potencia en 1_T
neas y transformadores, asT como la topología de la red. El estima_
dor está diseñado para producir el "mejor estimado11 de los voltajes
y ángulos de fase del sistema, reconociendo que hay errores de di fe
rente tipo en las cantidades medidas.
Muchos problemas se encuentran al supervisar un sistema de potencia
en lo referente a la adquisición de información. Estos problemas apa_

recen por los transductores de medida y las fallas de comunicación en
la transmisión de los valores medidos al centro de control.
Los transductores para medición en sistemas de potencia, así como.cuaj_
qui.er aparato de medida están sujetos a errores. Si los errores son
pequeños, pueden no ser detectados y no causar mala interpretación en
el analisis.de los datos del sistema, asf mismo, esos transductores
pueden dar un gran error en la medición de tal forma que el dato sea
inservible. Un ejemplo de este tipo de errores puede deberse a que
el transductoir ha sido conectado en forma incorrecta, finalmente el
equipo telemétrico a menudo experimenta períodos en donde los canales
de comunicación'están completamente fuera de servicio; esto priva al
operador del sistema de recibir'cualquier información de alguna parte
del sistema de potencia.
Es. por estas razones que las técnicas de estimación de estado en- si_s_
temas de potencia han sido analizadas, es decir, un estimador de esta_
do como veremos luego, está en capacidad de detectar errores aleato-
rios en las mediciones, detectar e identificar grandes errores de me_
dición y completar mediciones que han faltado debido a fallas de comu_
nicación.
1.3. ASPECTOS FUNCIONALES DEL PROCESO DE ESTIMACIÓN DE ESTADO
Una vez que los datos del sistema, en cualquier momento, han llegado
al centro de control, es posible aplicar la Teoría de Estimación para
encontrar las variables de estado.
1.3.1. Análisis de las mediciones [1]
Supongamos que tenemos un grupo de mediciones Y del sistema de poten;
cia en el que el estado es X (voltajes y ángulos nodales).
Si la medición fuera perfecta, tendríamos que la relación entre Y y
X está dada para el S. E.P. , -asi:
Y = f (Y)
Como cada medición tiene asociado un error: . •
Y2 = f 2 O + £2
Yk = fk(X) + £k
donde: Y : vector de mediciones real-izadas
X" : vector de var iables de estado.
f n ( X ) : re lación func iona l entre Y y X
k : número de mediciones.
en : error asociado a cada medic ión.
Entonces, en forma matricial tenemos que:
Y = 7(1) -f I

1.3.2. Función objetivo [i], [3]
El proceso de estimación de estado, consiste en minimizar una fun-
ción de las variables de estado, el criterio de solución utiliza el
principio de los mínimos cuadrados ponderados.
Una posible función objetivo es la suma de los cuadrados de las des_
viaciones entre los valores medidos y calculados, esto es:
k k .min J(X) = E e-¡2= - I (Yn- - fñ(X)):
o puesto en forma matr ic ia l , así:
min J (Y) '= [Y - Til)]1 [Y - 700]
para tomar en cuenta la precisión de cada medición, cada uno. de los
términos en el sumatorio es pesado en proporción inversa a la vanan-
za de la medida asociada, entonces:-
k (Y- - f.(X))2min J(X) = E — - - -
siendo V.¡ = a-j2 la varianza de la medida asociada, tenemos que:
kmin J(X) = Z E^-V^1 = I (Y - f.
1=1 1=1
Por lo tanto en forma matricial tendremos-:
min J (X) = [Y - fU)] . V"1. [Y - f (X) ] (1.3.1)
" 7
donde V es una matriz diagonal cuyos elementos son las varianzas de
cada medición y V'1 = W; a esta ultima matriz se la conoce como ma-
triz de pesos o ponderaciones.
En estimación de estado J(~X) se conoce como "FUNCIÓN DE ERROR".
1.3.3. Obtención del valor de.la Función de Error y su característica
Ul.
Si mediante alguna, técnica resolvemos (L3-1) y encontramos el estado X,
tendremos que en. el punto de solución los valores calculados de las
variables medidas son aproximadamente los valores medios de estas va_
riables. ." .
Entonces:
f-(X") = Y-¡ = u-j (Valor esperado de la medición Y-i)
La inspección de la función objetivo J(X") revela que: en la solución
cada uno de sus términos- es aproximadamente igual a:
Y, - u. 2) (Valor absoluto del término corres-
ai pendiente de la medición iésima)
donde cada una de las mediciones Y - , se asume sigue la distribución
de Gauss o normal. (Ver Anexo C).
Por lo que:k Y. - u. '2
J(X) = I (-1 I) = VALOR NUMÉRICO. i=l ai
Para efectos de comparación con el valor de la función objetivo, ana
lizaremos un concepto que servirá en el presente análisis: "Conside-
remos que tenemos un valor Z-j cuya función densidad de probabilidad
es normal, entonces este valor tendrá una desviación standard a-¡ y
un valor esperado igual a u-".
Si al valor esperado o medio u. lo restamos de el valor de Z. y al
resultado lo-dividimos para su desviación standard a-5.obtenemos un
nuevo término el mismo que tiene una función dens-idad de probabili -
dad llamada "NORMAL UNITARIA". Así mismo podremos decir que cuando
una función cualquiera es igual al sumatorio de los cuadrados de té_r
minos con función densidad de probabilidad normal unitaria, esta fun_
ción tiene una distribución la misma- que toma el nombre de: "CHI-CUA^
ORADO".
Dado que las mismas condiciones1 se han propuesto en el cálculo de
nuestra función objetivo J(D* concluimos que J(T) representa tam-
bién un valor con distribución CHI-CUADRADO (X2).
La función de error J(T) en el punto de solución como vimos anterior^
mente es un valor numérico de la distribución Xz que tiene la impO£
tante propiedad que su valor esperado es igual al número de grados
de-libertad. La figura siguiente muestra una familia de Curvas de
la distribución CHI-CUADRADO.

R:Grados de Libertad
Fig. 1.1: Distribuciones de CHI-CUADRADO para variosvalores de R.
1.3.4. Detección de Mediciones Erróneas [l].[ l
La distribución CHI-CUADRADO juega un importante papel en la detec-
ción de medidas erróneas. Estas son medidas que difieren totalmente
del valor verdadero por muchos a de acuerdo al equipo de medición u_
ti Tizado. Consideremos el caso en que existe una medición mala, esa
medida por definición no pertenece al rango +• 3a de la distribución
normal del aparato.
Conociendo los grados de libertad del problema particular, tendremos
una distribución Xz fija y conocida. El valor de la distribución
(eje horizontal de la figura anterior) que incluye el 99% del área -
bajo la curva, es teóricamente el valor máximo o bondad alcanzable
por la suma de cuadrados ponderados (J(X~)), si todas las medidas e
tuvieron dentro de ¿ 3a de su variación standard particular. La pre_
senda 'de una medida errónea producirá valores calculados que para
algunos términos diferirá, del valor medio por más de su individual

10
3a, haciendo que la suma de cuadrados exceda la bondad para un 99 %
de Confianza. Nótese que no se ha dicho que el término correspondí ejn
te a la medición errónea del residual J(X) sea necesariamente el ma.
yor. Puede ser que la diferencia entre el valor medido y el calcula_
do de la medición errónea sea pequeño y el error correspondiente a
una medición buena sea grande debido a la presencia de otra medición
errónea. Esta es la característica que hace que la distribución CHI
CUADRADO de detección de datos erróneos sea poderosa.
1.3.5. Identificación de datos erróneos [4]
Habiendo .detectado la presencia de datos erróneos, el problema con-
siste en identificar cuál es la medición mala.
Y-i - u-¡ 2Se ha dicho anteriormente que ( ) son errores cuadráticos a
solutos de cada medición, por lo tanto requieren de una normal i za_
ción para ser comparados en las mismas bases. Al término (Y-j - u-¡ )
se lo denomina desviación o residuo de cada medición, y se lo norma_
liza mediante el cálculo de la covarianza del residuo, el mismo que
se mostrará en el siguiente capítulo.
Una vez que los residuos han sido normalizados, el mayor valor nos
mostrará la medición mala, se la rechaza y se vuelve con el proceso
de estimación resolviendo nuevamente para todas las restantes medi-
ciones. Un condicionante de la teoría es que solamente se puede r
chazar una medición a la vez. Este proceso se continúa hasta que -
J(X) pase la prueba de detección de mediciones erróneas. Los valores
obtenidos de las variables de estado serán entonces, "LOS MEJORES ES
11
TIMADOS, .. con los cuales se calcula el flujo de potencia y los va-
lores de los datos que fueron deshechados en el proceso, para .final
mente ser entregados al operador del centro de control. De allí la
importancia de tener redundancia en las mediciones (más ecuaciones
que incógnitas) para de esta manera obtener una adecuada estimación,
detección e identificación.
1.4. OBJETIVO Y ALCANCE DEL TRABAJO
El objetivo fundamental del presente trabajo consiste en introducir
la teoría de Estimación a estudios de Sistemas Eléctricos de Poten_
cia, particularmente en la obtención de los mejores estimados de las
variables de estado de un sistema. Para el efecto se desarrolla- un
programa digital utilizando el método de Newton - Raphson formal, el
mismo que permite realizar la aplicación de la Teoría de Estimación
en.sus tres fases, es decir, estimar las variables de estado, además
de detectar e identificar datos erróneos en las mediciones. Para in_
troducir o simular los datos de entrada al estimador, se dispone .del
cálculo de Flujos de Potencia convencional usando el método Newton-
Raphson formal dentro del mismo programa.
Cabe mencionar que el programa desarrollado no intenta ser óptimo des_
de el punto de vista de programación, sino que más bien el objetivo
es introducir los conceptos de Estimación de Estado en Sistemas E_
léctricos de Potencia.
Con este programa digital se realizarán 3 ejemplos, a saber:
12
a) Sistema Ward and Hale de 6 barras.
b) Sistema de prueba de la AEP - IEEE de 14 barras, y
c) La estimación para el Sistema Nacional Interconectado (Sistema re_
ducido).
Para complementar el tema de Estimación de Estado se realizará. un
breve análisis teórico al estudio de Observabilidad de Redes, Pseudo_
mediciones y una breve descripción de la obtención de la topología
de la ' red en tiempo real.
En cuanto a otras aplicaciones de .la Estimación de Estado se desarro_
lia la teoría para obtener la curva Entrada-Salida de las Unidades
Térmicas, la misma que sirve de base para encontrar la curva de *Cos_
to incremental y de esta manera'aplicar en la programación de Despa_
cho Económico.
Como caso particular de la Teoría de Estimación en el estudio de Flu_
jos de Potencia se realizará el desarrollo analítico del Flujo de Po_
tencia Estocástico.
13
- , CAPITULO II
TEORÍA DE ESTIMACIÓN DE ESTADO
2.1. DESARROLLO ANALÍTICO DE LA TEORÍA DE ESTIMACIÓN DE ESTADO POR EL
MÉTODO DE LOS MÍNIMOS CUADRADOS PONDERADOS
Se ha mencionado anteriormente que la Estimación de Estado se refiere
al procedimiento en donde se usa un grupo redundante de muestras o me_
dlciones para calcular el valor de uno o más parámetros desconocidos
en un sistema.
Para cumplir con este objetivo se utiliza como criterio de solución
el método de los mínimos cuadrados ponderados9 como se mencionó en el
capítulo anterior el mismo que ofrece ventajas para manejar datos erró_
neos de entrada al estimador. Sin embargo, se deben conocer las ca-
racterícticas de estos errores.para poder determinar los valores de
los respectivos factores de peso; normalmente los factores d.e peso son
considerados iguales al inverso de las varianzas propias del equipo
de medición.
Para empezar con nuestro análisis consideremos que cada medición Y^
— r itestá relacionada con el estado X = [Xi, X^,.,., XmJ y que aceptamos
la existencia de error en las mediciones; entonces diremos que:
Y1 = f-00 + e. (2.1.1)'
Sabemos de antemano que en la formulación de Flujos de Potencia, base

del análisis de Estimación, el problema es no lineal pero que puede
lineal izarse mediante la expansión en series de Taylor. En esta cir_
cunstancia, su solución se encontraria al resolver un conjunto ' de
ecuaciones lineales; bajo:, estas condiciones empezaremos analizando
el modelo lineal para en función de éste poder desarrollar el modelo
no lineal . •
2.1.1. Modelo Lineal [1 ] [s] '*
Si asumimos que el sistema" es lineal, tendremos que:
(2.1.2)
donde: a- . coeficientes de la función' U
Xj variables "de estado del sistema
j = l,2,...,m ; m = numero de variables de estado.
Para un conjunto K de mediciones, la ecuación (2.1.2)::toma la formar
700 = AJT ; k > m
siendo 7(Y) vector.de k valores calculados
A matriz de coeficientes de dimensión k.m9 y
Y vector de variables de estado-
Se ha dicho que un conjunto sobredeterminado de ecuaciones puede ser-
resuelto mediante el criterio de los mínimos- cuadrados ponderados. El
cual consiste en encontrar los valores de las variables de estado
15
que minimizen la siguiente función residual:
k (Y, - f , (X) ) 2
J (X) = I n
i*l
reemplazando el valor de e. de la ecuación (2.1.1) en (2.1.3) podré_
mos escribir:
k ' (e.)2
si hacemos a-2 - V.» entonces:
J(X) = £ c.2. W_¡
donde: V-"1 = W -: factor de peso.
Esta última ecuación en forma matricial es igual a:
J(X") =' e* . W . I
E ': vector de los errores de las k mediciones.
Lo que equivale a escribir:
J (X) = (Y - A .X ) t ." W . (Y - A . X ) (2.1.4)
donde: W : es una matriz diagonal cuyos elementos son los factores
de'peso de las K mediciones.
Y : vector de las k mediciones realizadas.
16
Realizando las operaciones correspondientes, la ecuación (2.1.4) queda
asi:
J(X) = Y^.W.Y - Y^A^W.Y" - Y^.W.A.X* + It.At.W.A.Y' (2.1.5). .
Puesto que J(X) es un valor escalar, cada uno de los términos en la
ecuación (2.1.'5) es también un escalar; por tanto el valor transpuesto
de un escalar es el mismo valor, entonces:
pero sabemos también que W es una matriz diagonal, por lo que
= U
así, la ecuación (2.1.5) será igual a:
J(X-) = Y^W.Y - 2Xt.At.W.Y + X^A^W.A.X (2.1.6)
9El mínimo de J(X) se encuentra cuando ^ ^ ;; = O, para i=l,2,...3m.
Sacando las derivadas de los términos parciales de J(X) con respecto
a X en la ecuación (2.1..6) .nos queda:-
S .W.Y) _ n
3(X)
3(-2.X't.At.l.J.Y)
3(10 '

17
3(X)
Nota: Las demostraciones de estos resultados se verán en el anexo C,í
Por lo tanto tenemos que:
min J(X)<—>l = O = - 2 At.W.Y + 2 A^W.A.X (2.1.7)
despejando X de la ecuación (2.1.7) nos queda:
X = (At.W.A)"1.At.W.Y (2.1.8)
que es la ecuación principal que gobierna el estudio de Estimación de
Estado en sistemas de potencia para funciones lineales.
2.1.2. Modelo No Lineal [s] [e]
Hemos desarrollado la Teoría de Estimación de Estado para un sistema
lineal pero, sabemos que en Sistemas de Potencia el modelo es no li-
neal .
Entonces si consideramos error en las mediciones, el sistema de ecua-
ciones será:
Y = 7(>0 -v B
donde: f(X) vector de funciones no lineales del sistema, correspon-
diente a las diferentes mediciones realizadas.

18
Al Igual que el problema de solución de flujos de potencia, se reqaie_
re de una técnica iterativa de solución para encontrar el estado X
linealizando el problema mediante su expansión en series de Taylor,
asi:
f(x) = f(x,-J -o. AX + R
o
^ . AX"
donde F(X)/ \s el jacobiano de T("X) evaluado en los puntos inicia-
les supuestos X/ \
Asi; si Y = T(~X) + "E, entonces reemplazando f(X) por la ecuación an_
terior nos queda:
7= f(Xo) + F(X)(o) - AX +7'
de lo que resulta:
- A"X
que es una ecuación lineal.
El mínimo de la función de error se obtiene cuando
min J(X)<^> = O ; si: J(X) =3X
ó lo que es lo mismo si calculamos el gradiente de J(X~) y a este va

19
"lor lo forzamos a hacerlo CERO, entonces.se obtiene:
que es similar a la ecuación ( 2.1.8. ) calculada para el modelo li_
neal , con la diferencia que la matriz F no es constante, sino que va
cambiando en el proceso iterativo hasta lograr la mejor estimación.
\.Los valores corregidos son:
= + A ; j= # de 1terac16n
Las dos ecuaciones últimas se repiten hasta que se satisfaga el _
terio de Convergencia especificado, por lo que los últimos valores
del vector. X/.x nos determinarán el estado del sistema.
Las demostraciones en detalle de este modelo se verán en el anexo C.
Una vez que se ha evaluado X en el 'proceso (modelo lineal) o el ' me_
jar estimado X/.\n el modelo no lineal 5 es posible calcular el va_
lor de la función de error J(X) y proceder a la prueba de detección
e identificación de errores en las mediciones.
2.2. DESARROLLO ANALÍTICO DE LA TEORÍA DE DETECCIÓN E IDENTIFICACIÓN
DE ERRORES DE MEDICIÓN
Los componentes del sistema de adquisición de datos que influyen en
la precisión de las mediciones de un Sistema de Potencia son:

20
.'Transformadores para medición (de corriente y voltaje).
. Transductores de Potencia: activa y reactiva. • •
. Convertidores analógicos y digitales.
. Transmisión de información.
Considerando que todo este equipo esta sujeto (por diferentes causas)
a errores o fallas, es necesario filtrar la estimación realizada ar^
tes de obtener el-mejor valor de estimación. \'.
En este contexto', empezaremos por analizar cuan bueno es el valor
obtenido de la función de error o Residual J(Y).
2.2:1. Detección de Mediciones Erróneas
Para detectar la presencia de mediciones erróneas, confiaremos en la
noción intuitiva que para una configuración dada, la función de error
J(X~), calculada después que el algoritmo del Estimador de Estado con_
verge, (resolución de ec'. (2.1.8) o (2.1.9) será más pequeña si no
hay mediciones erróneas. Cuando J(X) es pequeño, un vector X" (es de_
cir"a voltajes y ángulos de fase) ha sido encontrado, de esta manera 9
los valores calculados (flujos, inyecciones de potencia, voltajes)
compatibilizan justamente con todas las mediciones. Generalmente, la
presencia de una medición errónea provocará que el valor en la con-
vergencia de J(X") sea mayor que el esperado. Visto de esta manera -
surge una incógnita,¿Qué magnitud de J(X) indica la presencia de me_
diciones erróneas?.
Sabemos que los errores de medición son aleatorios, entonces pode-

21
mos concluir también que J(X) es un número aleatorio por la depen-
dencia que existe entre ellos. Si hemos asumido que todos los erro_
res son descritos por su respectiva función densidad de probabili-
dad normal, y que cada término en el sumatorio de J(X) tiene una
función densidad de probabilidad normal unitaria, entonces J("X) tie_
ne una distribución, de probabilidad conocida como: distribución -
CHI-CUADRADO, la cual se describe como X2(R).
El parámetro R es llamado "GRADOS DE LIBERTAD" de la distribución
X2. Este parámetro es definido como sigue:
• R f k - m .
donde: K = número de mediciones
m = número de variables de estado.
Una propiedad de esta distribución es. que su valor medio es igual al
número de grados de libertad y su desviación standard igual a *^2R.
Por lo que: ¡T(X") = R , y
= v/2R~
2.2.1.1. Prueba de hipótesis en el análisis de detección
Si a J(X) asignamos un valor límite, el cual llamaremos tj, podremos
declarar que las mediciones erróneas es-tan presente cuando J(X~) > tj.
Esta prueba de entrada puede ser errónea en cualquiera de estos dos
casos.

22
1) Si a tj asignamos un valor pequeño, podremos tener muchas "falsas a_
1 armas". Esto es, la prueba indicará la presencia de mediciones ma_
las, cuando en efecto no hay ninguna;
2) Si asignamos a t.¡ un valor grande, la prueba indicará a menudo quejtodo esta bien cuando en realidad existen mediciones erróneas..
Todo esto puede ser puesto sobre una base formal-, escribiendo la sj_
guiente ecuación:
PROB (J(X) > tj/J(X) tiene-distribución X2) = a, con R grados de lj_
bertad. . . •
Esta ecuación muestra que la probabilidad- de que J(X) sea mayor que
t- es igual a a, dado que. la densidad de probabilidad de J(X) seauCHI-CUADRADO con R grados de libertad.
Este tipo de procedimiento de prueba es formalmente conocido como
PRUEBA DE HIPÓTESIS y el parámetro a es llamado el "NIVEL DE SIGNIF^
CANCIA" de la prueba. En forma gráfica la prueba se realiza así:
R= k-m
Fig. 2.1 Prueba de hipótesis para la función de error J(x)
23
Escogiendo un valor para a,, automáticamente conoceremos que valor de
tj usar en-nuestra prueba.. Cuando usamos un tj derivado de esta ma^
ñera, la probabilidad de. una "falsa alarma" es igual a c¿. Poniendo a
a un valor pequeño por ejemplo a = 0.01 podremos decir que las fal-
sas alarmas ocurrirán en solamente el 1% de las pruebas realizadas..
Esta es la prueba que hace que la distribución CHI-CUADRADO sea Ta
herramienta más importante en la fase de detección de datos erróneos
dentro del algoritmo de Estimación de Estado-,
2.2.2. Identificación de Mediciones Erróneas [7]
Conociendo como se detecta la presencia de error en las mediciones ^
la siguiente incógnita será : ¿Cuál de ellas es o son las. malas?;
Para realizar el presente análisis consideraremos quer
Las ecuaciones de los valores medidos pueden escribirse como función
lineal de las variables de estado alrededor del punto de operación »
así:
Ym = A . Yt + F (2.2,1)
donde: Ym : Vector de cantidades medidas.
Xt : Vector de valores verdaderos de las variables de esta-.
do.
e : Vector de errores aleatorios de medición.
En el proceso de identificación, se asumirá que el vector F es un
24
"conjunto de variables Independientes distribuidas normalmente con
las s iguientes propiedades:
E(I) = O"
( 2 . 2 . 2 )
y . .Ed.e*) = a2. V
donde V es una matriz diagonal de covarlanzas y a2 es un valor esca_
lar desconocido.
La suposición de normalidad de los errores puede justificarse . par-
cialmente, puesto que' las componentes del vector e son la suma de
varios errores aleatorios. Por lo tanto, aplicando el Teorema' Cen-
tral del límite,la distribución de las componentes del vector E es
••aproximadamente normal.
2.2.2.1. Valores Esperados
El valor esperado de Ym puede obtenerse directamente a partir de la
ecuación (2',2.1), así:
E(7m) = A.Xt + E (I) = A.X"t = Tt (2.2.3)
donde Y-t es el vector de valores verdaderos de las cantidades medidas.
El valor calculado de las cantidades medidas, está dado por:
Te = A . ~Xc (2.2.4)

25
donde Xc es el valor calculado de las variables de estado usando la
teoría de Estimación.
SI calculamos el valor esperado de la expresión (2.2.4) entonces:
E(Yc) = E(A.Xc) = A.E(Xc) (2.2.5)
De la teoría de Estimación, sabemos que Xc es Igual a:
Xc = (Ar . W . A)-1 . W . Ym
por lo tanto E(Xc) = (At.-W.A)." 1.At.W.E(Ym)
o lo que es lo mismo:
.Xt = XtE(Xc) = (A. U. A)
Substituyendo la ecuación-; (2.2.7) en'(2.2.5) nos da:
(2.2.6)
(2.2.7)
E(Yc) = A.Xt * Y.t
Nótese que Ye es un valor aproximado del verdadero Yt.
2 .2 .2 .2 . Var lanzas .
(2.2,8)
002755
Por definición sabemos que los términos-de la varlanza serán los eTef
mentos de' la diagonal de la matriz de Covarlanzasi.3 Aplicando este
concepto, nos limitaremos a calcular las matrices de Covananzas • —

de los valores calculados en el proceso de Est imación.
Conocemos que:
£(¥.£*) = a2 .V = CT2.W~l (2.2.9)
y por de f in ic ión , que la matriz covarianza de Xc es:
Cov ( X c ) = E [(Xc - E (Xc) . (Yc - E (Xc) ) T ] (2.2.10)
de las demostraciones anteriores sabemos que:
E ( X c ) = Yt .
entonces: Cov (Xc) = E [(Xc - X~t) • Üc - Xt)1] (2.2.11)
de consideraciones anteriores tenemos que:
Ym = A.Xt + e"
y Xc = (At.W.A)-1.At.W.Ym (2.2.12)
desarrollando la expresión (2..2.12) nos queda
Xc ='(At.W.A)-1.At.W.A.Xt
por lo tanto Xc = Xt + M.e ; donde : M = (At.W.A)" .W
así: X"c - X"t = M"e (2.2.13)

27
Reemplazando la ecuación (2.2.13) en (2.2.11) obtenedremos Va.siguien_
te expresión:
Cov (Xc) = ECM.e.e1^^]
Mt
= M . -a2 . W1 . F-T (2.2.14)
Si reemplazamos, el valor de M en(2,2.14) la covarianza de Xc será:
,1 t ! t 1 t M 'Cov (Xc) = -a2^ (A .W.A)-\A\W.l£J.]i.A.(AL.W.A) V;, u Ju
, t - tentonces Cov fxc) = a2(A .W.A)"1. Puesto que la matriz (A .W.A)"1
es simétrica, por lo mismo:
t t t(At.W.A)-1 = (At.H.A)"1
de lo cual nos queda que:
Cov (Yc) = °2 (A.W.A)"1 (2.2.15)
La matriz covarianza de Yc puede obtenerse, al igual que lo hicj_
mos con Tc, mediante la siguiente expresión:
cov (YC) = E [(YC - E(YC)).'(YC - E(YC)) J (2.2.16)
si reemplazamos los valores de Yc de la ecuación ( 2.2.4) y de E (Te) de

28
la ecuación (2.2.8) en la ecuación;; '(2.2.16) y realizamos todos los
cálculos .veremos que:
Cov (Ye) = a2 .A.(At.W.A)"1.At (2.2.17)
o visto de otra manera:
Cov -(Te) = A . Cov (Xc) .A1 (2.2.18)(.
La demostración" se verá en el anexo C.
Al evaluar estas matrices, es decir, las covarianzas de Xc y YC sirh
píamente podemos conocer que tan buenas han sido las estimaciones p
ra las variables de estado y los términos calculados (flujos, inyec-
ciones, voltajes) a través de todo el proceso, sin embargo, todavía
no estamos en condiciones de identificar el dato erróneo; para lo-
grar este objetivo, como se mencionó.en el capítulo anterior es nece_
sario poner a todos los'residuos en las mismas bases; esto se obtie-
ne de la siguiente manera:
2.2.2.3. Matriz Covarianza de los Residuos
Llámese a 2 vector de residuos, cuyos elementos tienen una función
densidad de probabilidad normal, entonces:
I = Yin - Ye -
Si calculamos el valor esperado de Z; tendremos:
29
E(Z) = E(Ym) - E(Yc) = O (2.2.19)
La matriz covarianza de los residuos será igual a:
Cov (Z) = E [(Z - 0 ) ( Z - O)1]
[(Ym - Y c ) ( Y m - Ye)1] (2.2.20)
Sabemos que: Ym - Ye = A Xt + e - A Xc;
entonces:
Cov (Z) - E[(A.)Tt + ^ - A.XcHATt + F- A.Ic;
pero: A.XC = A.X.t + M ' .e donde: M1 = A . (A t .W.A)
por lo que:
Cov (I) = E[(I- M ' D d - M'F)^ (2.2.21)
si realizamos los productos respectivos en la ecuación (2:2.21) nos que_
da:
Cov (Z) = EC^.I1) - EíF.e^.M'1 - M 1 .ECF."^) + M 1 .Ed.^jM1*( 2 . 2 . 2 2 )
reemplazando la ecuación (2.2.9) el término de M' y M1 en la ecuación
(2,2.22) y realizando las operaciones pertinentes se llega a obtener
Cov (I) = a2 [ V - - A.(At.W.A)" l .A12 (2.2.23)
30
que es la matriz principal, la misma que se utiliza para el análisis
de identificación de errores.
2.2.Z.4. Prueba de Hipótesis en el Proceso de Identificación de Medj_
ciones Erróneas
Dentro del proceso de identificación, podemos decir que el vector Z
de residuos es el más apropiado para realizar nuestra prueba ya que
toma en cuenta el filtrado de errores, además de que su valor espe-
rado es igual a "CERO",
Para demostrar 'lo dicho, consideremos que se toma una medición cual_
quiera del conjunto total de muestras llamada Y-m. En la figura 2:-2
mostraremos la curva con función densidad de probabilidad normal de
Y.m, en ésta consideraremos que el error en Y-m es normalmente di_s_
tribuido con valor esperado igual a O, entonces la curva estará . cen_
trada sobre su valor verdadero Yt.
F.DP.DE
Y¡ mf.D.P. : Función Densidadi . de probabi l ida d.
Y¡t Va lo r Medido Y¡ m
Fig. 2.2 Curva de F.D.P. normal para Yim
Dado que los errores de todas las mediciones se asumen normales, dj_
remos que los estimados Xc están distribuidos normalmentey qu,e cual

31
quier cantidad que es función de Xc está también distribuido con fun_
ción densidad de probabilidad normal. En la'fig. 2.3 se muestra la
curva del valor calculado Y.JC.
F.D.P- jDE
Y¡t Valor Estimado,
Fig. 2.3. Curva de F.D.P normal para YÍC
Nótese que esta función tiene una desviación más pequeña para el " mij_
mo valor medio que la de la medición Y-m. Esto es correcto, ya que
debido a la redundancia en las mediciones el estimado es más preciso.
La diferencia entre el valor estimado y el medido es llamado residuo
y se lo designa por Zi. La función densidad de probabilidad para Zi
es también normal y se muestra en la figura 2.4. La característica de
este valor es de que su valor esperado es O como se demostró anterior_
mente y además que su desviación standard es 071-
¡ -Yirrr Yic
z¡
Fig. 2.4. Curva de F.D.P normal para

32
Si dividimos el valor de Zi para su desviación standard a -,- hemos ob-
tenido el término que fue denominado en el capítulo anterior como" R£
SIDUO NORMALIZADO" de la iésima medición. Se lo designa como Zi
y su curva se muestra en la figura 2.5.
7no roí Y i m - Y j c~~
jnorm.i
Fig. 2.5 Curva de F.D.P normal para Z-¡
Esta curva tiene una función densidad normal y su característica es
que su desviación standard es igual a la unidad. Una prueba de Hipó_
tesis puede darse; a saber:
Si el valor absoluto de Zi es mayor que 3, tendremos una buena
razón para sospechar que Yim es la medición mala, sin embargo, el pro
cedinriento usual en esta fase de identificación de mediciones erró-
neas, consiste en calcular los residuos normalizados para cada medi-
ción y aquel que tiene el mayor valor absoluto es el que se considera
contiene la medición errónea. Una vez que se llega a este punto se
rechaza la medición errada y se vuelve con el proceso de Estimación
para las restantes medidas, hasta que J(X) pase la prueba de detec -
ción de datos erróneos.
Este tipo de prueba es muy similar a aquella que se realiza con la
33
distribución t de Student y que se enuncia aquí: Cada componente de
Y está sujeto a la prueba de" Hipótesis sobre su valor medio. La es_
tadística usada para esta prueba viene dada por:
- Yic
/VAR(Zi) °7i
donde: T\~ :es el valor absoluto de cada residuo normalizado.
Zi " :es Ta" "componente de Z correspondiente a la iésima me_
dición.
VAR(Zi) es el elemento de la diagonal de la matriz covarian_
za de los residuos, correspondiente a la iésima medj_
ción. •
La prueba muestra que Y-j tiene una distribución t de Student con (tf)
grados de libertad, bajo la hipótesis Ho: que el valor esperado de
Zi es CERO.
Si la desviación de Ho es significante en varias pruebas, la • compjD
nente de Z con mayor valor absoluto de VT será probablemente la
medición errónea.
2.2.3. INTERVALOS DE CONFIANZA
En este capítulo se ha demostrado la fórmula que permite calcular los
valores de los mejores estimados. Así mismo en el proceso de identifi_
cación de datos erróneos se han calculado las matrices de Covarianzas-
de "ios diferentes parámetros que intervienen en el proceso, sin emba_r
go, no se ha dicho nada sobre la utilidad de estos últimos valores.

34
Para evaluar su Importancia -anal izaremos lo siguiente: Sabemos que
los mejores estimados de las variables desconocidas serán los valores
medios o verdaderos, entonces, dado que estos valores están distribuí^
dos normalmente tendrán una desviación standard c r sobre su .valor me_
dio. Así mismo, tenemos que los valores calculados también están dis_
tribuidos normalmente y por tanto su desviación será ayo alrededor de
su valor medio. Sobre está base podremos decir que: Todo valor con
densidad de probabilidad normal, tendrá un rango de variación sobre
su valor verdadero, el mismo que considera la incertidumbre de las
variables, de adoptar un cierto valor dentro de un "INTERVALO DE "CON-
FIANZA" dado.
Esto es: -
o c = Yt ± S oyc
En forma general :
a = u +_ S a
donde: a : Valor calculado o estimado.
u : valor esperado o medio de a.
a : desviación standard.
S: es un valor arbitrario y representa el coeficiente de confianza de
que el valor (calculado Q estimado) se encuentre dentro del intervalo,

35
asi podemos decir que: .
para un 68% el valor debe estar entre u +_ a ; S = 1
para un 95% el valor debe estar entre u +_ 2a; S = 2
para un 99% el valor debe estar entre u + 3a; S = 3
NOTA: Los valores de a%z yayc Pueden ser extraídos de los elementos
de la diagonal' de Tas matrices de Covarianzas tanto de Xc como de Ye.
2.3. CONSIDERACIONES Y SÍNTESIS DE LA TEORÍA DE ESTIMACIÓN DE ESTADO
Al aplicar la teoria de Estimación de estado en Sistemas de Potencia
para análisis en tiempo real, varias son las consideraciones que se
han hecho para dar al algoritmo un margen de confianza en la obten-
ción de la solución, a saber:
- Puesto que el algoritmo es un proceso iterativo en el cual se elj_
minan 'datos, dependiendo de su calidad individual, se considera ne_
cesario tener redundancia suficiente en las mediciones de tal fo_r
ma que al entrar el proceso en la fase de detección e identifica-
ción de errores, no se caiga en el problema de tener igual o menor
número de ecuaciones con respecto al número de incógnitas.
La redundancia de un conjunto de mediciones viene definida por:
_ k - m = k ,m m
donde: m : número de variables de estado.

36
k : número de mediciones.
r : redundancia en p.u.
Una redundancia de cero (r = 0) indica un caso determinístico don-
de el número de mediciones es igual al número de ecuaciones.
En el modelo lineal la redundancia mínima requerida para obtener -
resultados aceptables, considerando que todo el sistema de medición
es de buena calidad, es del 10% (r = 0.1).
Si sabemos que en el modelo no lineal se incluyen mediciones de
nitud de voltaje e inyecciones de potencia activa y reactiva para
mejorar la -redundancia, entonces el valor de r mínimo será aquel
que cumpla también con los requerimientos de observabilidad, en es_
te caso r^0.6 o dicho de'otra manera, la redundancia mínima re-
querida será del 60%.
- Que se ha escogido el método de los mínimos cuadrados ponderados
para el análisis, ya que es el que más ventajas ofrece al estima-
dor para poder obtener un mejor ajuste entre los valores medidos
y calculados, teniendo como premisa, la mayor cantidad de ecuacio^
nes con respecto al número de variables de estado a estimar.
- Que dentro del proceso de medición, inherente a cada equipo9 exis-
te una cierta cantidad de error; el mismo que es tratado en base a
su respectiva función densidad de probabilidad.
- En la detección de errores se ha consideraro que la función de -

37
error J(X), por definición, corresponde a un valor de la distribu-
ción. CHI-CUADRADO para un cierto grado de libertad. Esto es im-
portante notar, da-do que esta distribución es una de las más usa-
das para encontrar la bondad de ajuste de datos muéstrales con res_
pecto a datos teóricos o valores esperados.
- En el proceso de identificación aparece el término a2 al calcular
las matrices de covarianza; en el presente estudio se considerará
a2 = 1, usando el criterio de la mejor estimación para la varian-
za. Esto significa que cada factor de peso para cada medición se
asume igual al inverso de la varianza de la respectiva distribu-
ción normal del equipo utilizado.
- Por último, sabemos que en el-estudio de flujos de potencia conve_n_
cional el número de variables de estado está dado por el valor
2x(NODOS-l), dejando a un lado las variables correspondientes a la
barra slack. En estimación de estado el problema es parecido pues_
to que se deben asumir también valores de magnitud y ángulo de fa_
se de la barra slack, sin embargo, el número de variables de esta_
do a estimar aumenta en uno, es decir, (2xNODOS-l). Esto se debe
a que en la barra slack también es posible realizar mediciones cp_
mo en cualquier otra barra y por tanto es necesario conocer las va_
riaciones que experimenta (en el cálculo) el voltaje en cuanto a
la magnitud, para estimar en mejor forma el comportamiento del sis_
tema, incluyendo a la barra slack. El ángulo de fase en la slack
si debe ser especificado y su valor a considerar es de 0°.
En síntesis, vemos que la teoría de Estimación de Estado por recoger

38
todos estos factores tan significativos en un proceso de mediciones,
quizás, el algoritmo más importante y completo en la supervisión y
control de un sistema de Potencia, así como en cualquier otro • sistjs
ma, ya que provee la forma de procesar datos redundantes para esti_
mar en mejor forma, (detectando e identificando datos incorrectos o
perdidos) el estado del mismo y de esta manera asegurar la validez -
de la información, proporcionada al operador de un centro de control.
2A. DIAGRAMA DE BLOQUES DEL MODELO DE ESTIMACIÓN
CONFI CURADOR
1
DE REDES
'
LEER MEDICIONES DEL SISTEMA
< '
RESOLVER EXPRESIÓN DE ESTI-
MACIÓN CON LAS MEDICIONES
EFECTUADAS
EMPEZAR NUEVA ITERACIÓN
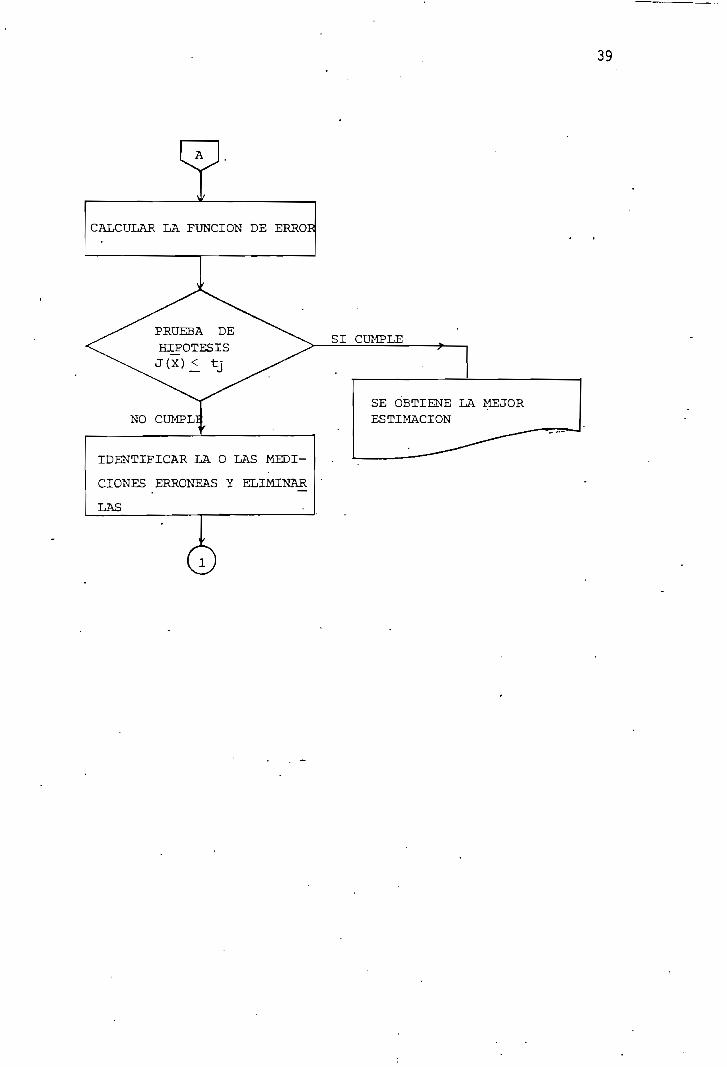
39
SI CUMPLE
NO CUMPL
IDENTIFICAR LA O LAS MEDI-
CIONES ERRÓNEAS Y ELIMINAR
LAS
SE OBTIENE LA MEJORESTIMACIÓN

40
3.1. APLICACIÓN DE LA TEORÍA DE ESTIMACIÓN DE ESTADO EN LA OPERACIÓN
DE SISTEMAS ELÉCTRICOS DE POTENCIA
Supervisar y controlar un sistema de potencia, significa primeramen-
te recoger la Información más apropiada para conocer las condiciones
de operación del mismo, basado en la cual, es posible que se tomen
las acciones de control más adecuadas para el funcionamiento normal
del sistema. . ;
Parte.de esta Información debe ser obtenida por mediciones en tiem-
po real, mientras que la restante-puede ser calculada a partir ' de
los datos disponibles; sin embargo, a diferencia de los cálculos COJT^
venclonales de flujos de Potencia, para aplicar la teoría de Estima^
clon de Estado es condición necesaria que exista suficiente redundan_
cía en las mediciones con relación a las variables de estado, para de
esta manera disminuir la probabilidad de posibles errores en las can_
tidades estimadas.
En este contexto, sabemos que las variables de estado a estimarse en
un sistema.eléctrico de potencia son: la magnitud del voltaje y el
ángulo de fase de cada nodo, excepto el ángulo de fase de la barra
que se considera slack o de referencia en el estudio de flujos; mien_
tras que las mediciones de fácil acceso en un sistema son: flujos de
potencia en líneas y transformadores, Inyecciones en barras,así como
las magnitudes de los voltajes en los nodos, que como conocemos son
funciones no lineales de las variables de estado.
41
En el capítulo anterior se ha demostrado en forma general la utilidad
de aplicación de la Teoría de Estimación en sistemas lineales y no lj_
neales. Nos introduciremos ahora con precisión en la aplicación de
esta teoría dentro del campo de Sistemas Eléctricos de Potencia.
3.1.1. Algoritmo de la AEP (American Electric Power)
El Algoritmo de la A.E.P. se basa solo en mediciones de flujo de po-
tencia en líneas y transformadores, sin considerar ningún otro tipo
de medición. Esto tiene la gran ventaja como veremos luego, que el
sistema de ecuaciones es lineal y por tanto se aplica el modelo lineal
de Estimación para su solución, el mismo que es directo y simple, aun
que tiene el gran inconveniente que no es .aplicable en todo "sistema
de potencia, sino en sistemas sumamente mallados, ya que al medir s
'lo los flujos por las líneas.y transformadores en sistemas que no sean
muy mallados, no se consigue la suficiente información desde el punto
de vista de Redundancia y no se podría realizar la estimación. Como
es de nuestro conocimiento, el flujo de potencia por Tas líneas y
transformadores es muy sensitivo a la configuración y punto de opera-
ción del sistema de potencia, por tanto en adición a la simplicidad -
del algoritmo, generalmente existe mayor contenido de información en
estas medidas que en otras tales como inyecciones y voltajes nodales.
(Detalles y demostración del modelo se verán en el punto 2 del preser^
te capítulo).

42
3.1.2. Algoritmo que utiliza como modelo de solución el Método de New
ton - Raphson
Este algoritmo es mucho mas general que el anterior* puesto que se
pueden realizar mediciones tales como: inyecciones de potencia en las
barras, magnitudes de voltaje y flujos de potencia por líneas y trans_
formadores., es decir: que es" posible evaluar el sistema en forma más
precisa ya que s-e dispone de mayor cantidad de información para la es_\'.
timación de las variables de estado. Este algoritmo utiliza el modelo
no lineal para la solución.
Dentro de este algoritmo*se puede considerar al igual que en flujos' ,
la solución mediante las 3 técnicas conocidas, es decir:
- Método de Newton - Raphson Formal
- Método de Newton Desacoplado, y
- Método de Newton Desacoplado Rápido.
En el presente trabajo, como se mencionó originalmente se tratará s .
lo" el primer método y en base a éste se procederá a realizar la esti_ -
mación para los ejemplos propuestos.
3.2. MODELO DEL ESTIMADOR CONSIDERANDO DIFERENTE TIPO DE MEDICIONES
En el punto anterior se mencionaron los 2 algoritmos que se utilizan
en la Estimación de las variables de estado de un S.E.P.. Seguidamen-
te resolveremos el modelo de: La A.E.P. y el de Newton-Raphson Formal;
a saber:
3.2.1. Algoritmo de la A.E.P. j> ]'
Este algoritmo resuelve un conjunto sobredeterminado de ecuaciones de-
flujos en lineas y transformadores, minimizando la función objetivo'
J(Y)> la misma que en este caso estará dada por el sumatorio del cua
drado de las diferencias entre los valores de los flujos medidos me-
nos los calculados, así:
kJ(X) = I [S - S J2 (3.2.1)
v . , L Da.m Dq.cJ N
Considerando los factores de peso del equipo de medición Wi , entonces
la ecuación (3.2.1.) queda de la siguiente manera:
J(X) = • £ [S - S ]z. Wi (3.2.2)1=1 L pq.¡m pq.¡cj
o en forma matricial
= [Sm - SJ . W . [Sm - Sc] (3.2.3)
Un paso clave en este algoritmo es la transformación de variables,que-
consiste en que al flujo de potencia activa y reactiva en los elemen^
tos de transmisión, se los expresa en función de las componentes real
e imaginaria de los voltajes de los elementos.
Para el análisis consideremos el circuito equivalente ir para represen_
tar a un elemento del sistema de transmisión, así:

44
-Zpq
Ip.q
Ypo Vqo
donde:
Fig. 3.1 C-ir curto equivalente TI de un elemento de in_terconexión.
*S = E Ipq p " pq
(3.2.4)
n n * , *-9 - £) + (E Y
v 'pq
E - Epor lo que: S = E [(—hL-pq p z
.•*
pq(E . Y
P í
(3.2.5)
pero; E - E = V ; Voltaje del elemento (3.2.6)
entonces: spq = Ep[(Jl)* + (Ep . Ypo)*] : (3.2.7)
Sabemos que si S es el vector de flujos, medidos; podremos escribir:pqm
S = S + epqm _pqc (3.2.8)
siendo S el vector de los flujos calculados y &v, el vector de lospqc J TM
errores asociados a cada medición. : •
Las variables de estado para este algoritmo serán entonces los volta_
jes de los elementos, ya que como hemos visto el valor de S es una
función de V , entonces:
45
Spqc - fpq ( .
Spqc=Ep[(^)*+(Ep. Ypo)*] (3.2.10)
Así mismo, Spqm = E p [ ) * + (Ep - Ypo)*] (3.2.11)
pero sabemos que: ^ = Spqm - Spqc (3.2.12)
V . Ventonces: e = E [(-ME)* + (E . Y )*] - E [(-E3£)* + (E Y )*]
Pq P zpq P P° P zpq P P°
V V= E [(_»)* . (J29C)*]
P zpq Zpq
pqpq
Si aplicamos el criterio de los mínimos cuadrados ponderados como en
(3.2.2) obtendremos:
J(V) = [F1=1
que es la ecuación que va a ser minimizada; o lo que es lo mismo
k E E*J(V) = I (V - V ) . Wi (V - V )* -£- . —B-^ J . v pq.m pq.c' v pq.m pq.cy z* z1=0 r^i ^n KMi K^t pq pq
Por simplicidad de notación, designamos a cada elemento pq. con el
subíndice j; por lo cual:
E- .. E* .J(V) = leí.VI. = Z(V. - V. ) W. £ , p (V. - V. )* (3.2.14)
J J jm jcy j zpq*zpq Jm JC

46
lo que en forma matrlclal es:
J(V) = [Vm - Ve]1 . A . [Vm - Ve]* (3.2.15)
donde: Vm : vector de voltajes medidos del elemento en base a S .
Ye : vector de voltajes calculados del elemento.E |2
A : es-una-matriz diagonal de términos d- = W - —-j j ¿. •j
SI V. = V = E - E y lo que nos Interesa es conocer los voltaje • pq_jC p q • —
jes nodales E y E , entonces veremos que el vector de voltajes • cal_
culados de los el ementos3puede expresarse como:
Ve = A . E" (3.2.16)
siendo E el vector de estado de voltajes nodales y A una matriz. 'cu-
yos elementos son 1, -1 y O, es decir, en la hilera j aparecerá un .1
y un -1-en las columnas p y q respectivos a la medición.
Reemplazando la ecuación (3.2.16) en (3.2.15) se tiene:
J(E) - [Vm - A.E]1 . A . [Vm.- A.E]* (3.2.17)
Asumiendo que en la matriz A', los términos E 2 se mantienen constan_
tes, los términos de A son constantes. Esta aproximación afecta muy
poco a las ponderaciones dadas a las mediciones» por lo que cons1de_
ramos que su efecto es despreciable.

47
El valor de V - puede obtenerse de (3.2.7) así:
.P. ,-.j Q.V. = [ ( W Jm) - Y . E ].Z. ' (3.2.18)jm L E * po p J j '
El valor de E también se asume constante en cada Iteración, de esta
manera el sistema de ecuaciones Y = f(X~) + e es lineal ya que:
Vm = A.E + e •
* (3.2.19)donde JfE) = .A.l = [Vm - A .? ] .A . |Vm - A. E]
desarrollando la ecuación. (3.2.19) nos queda:
_ t __ * — t t _ * _ t *_* _t t * — *= Vm .A.Vm - E\ .A.Vm - Vm .A. A .E + E-V.AL.A-A .E.
(3.2.20)
Dado que J(E) en el punto de solución es un valor numérico, entonces
cada término de la ecuación (3.2.20) es un valor numérico, por lo tan_
to podremos escribir:
— t t — * r— t t • — *n tE\A\A.Vm =.[E .A -A.Vni ]
— *t t —= Vm .A .A.E
_ t *t * —*= Vm .A .A .E
*tpero A es una matriz diagonal y real, entonces A = A ; asi mismo
A = A* por ser real, por lo que:

—t t — * — t —*EL.A .A.Vm = Vm .A,A .E
Reemplazando esta igualdad en la ecuación (3.2.20)
J(E) = Vi/.A.Vm* - 2 Vf/.A.A.E* + Et.A.A.A.E*
Como Vm se asume constante; el mínimo de la función de error es:
9J(E) = - 2 Vmt.A.A + 2 Et.At.A.A =
9 (E)
por lo tanto:
A^A-A = Vmt.A.A
así: l^.bA.E = A1.A.Vm . (3.2.21)
Donde el valor estimado de E es:
E = (A t .A .A)" 1 .A t .A ,Vm . (3 .2 .22 )
La nolinealidad real del problema, por ser Vm función de E, se toma
en cuenta al resolver iterativamente las ecuaciones (3.2.18) y
(3.2.22).
La ecuación (3.2.21) se resuelve por descomposición L.U. para encon-
trar E equivalente a (3.2.22) y únicamente en la primera iteración
tya que A .A.A es una matriz constante, dispersa y real.

49
Resuelta E para el valor Vm con ciertos valores E asumidos se re»_ P
calcula Vm con los valores de E calculados y también se vuelve a
evaluar (3.2.Z1), el proceso continúa iterativamente hasta que se
satisfaga un criterio de convergencia.
NOTA: Un voltaje de barra se asume conocido y se usa como referen-
cia.
La característica de A .Á.A y la forma del algoritmo hacen que este
sea un método rápido.
Una vez que se obtiene E- se .evalúa J(F) para las pruebas de detec-
ción e identificación de medidas erróneas.
3.2.2. Modelo No Lineal: Método de Newton-Raphson Formal [5']
Se ha dicho que este modelo es más general,.ya que las mediciones -
realizadas en tiempo real para análisis de la Estimación de Estado
incluyendo las lecturas redundantes, pueden ser combinación de -da-
tos de flujos de potencia, voltajes de barra e inyecciones de poten_
cia en los nodos. Asumiendo que las potencias activas y reactivas
en las barras son escogidas como el conjunto de variables dependien_
.tes, cualquier dato adicional tal como voltaje de barra o flujo en
líneas puede ser usado como redundancia.
Con estas premisas, procederemos ahora-a evaluar las ecuaciones que
se utilizarán en el proceso.
50
3.2.2.1. Si la medición corresponde a inyección de P ó Q
Si consideramos la estructura de referencia nodal, entonces podremos
decir que la inyección de potencia compleja a la barra p está dada
por:
Sp = Pp + j Qp = Ep ( Ypq.E p=l,2,...,n
(3.2.23)
donde: E y' E son los voltajes en las barras p y q.
Y ; elemento pq de la matriz admitancia de barra.pqn • número de barras en la red.
Expresando los voltajes de barra y las admitancias, en coordenadas po
lares por: ' E = V . ej"6p . ; Y
.(3.2.23) llega a ser:pq pq j la ecuación
S = I V .V . Yp n=i P q pq .e j(0pq+óp-Sq)(3 .2 .24)
Separando las partes real e imaginaria de la ecuación (3.2.24) .nos
queda:
P = £,V .V . | Y |. eos (9 + 6 - ó )p q=i p q ' pq1 pq - P q (3 .2 .25)
y Q = S V .'V . Y . sen (9 + 6 - 6 )wp q=i p q pq pq p q (3 .2 .26 )
51
3.2.2.2. Si la medición corresponde a módulo de voltaje de barra
Al igual que se hace en el estudio de flujos de potencia convencional
en el análisis de barra de tensión controlada, la ecuación de voltaje"
está dada por:
E |2 = V2p1 pm (3.2.27)
donde: V : magnitud de voltaje medido.
3.2.2.3. Si la medición corresponde a flujos de potencia activa y/o
reactiva en líneas
Considerando el circuito equivalente TT de la linea, al igual que lo
hicimos en el análisis del Algoritmo de la A.E.P. la ecuación (3.2.7)
queda de la siguiente manera:
pq ' V + ('EP '
pero V = E - E ; así tendremos que ;
En coordenadas polares la ecuación (3.2.28) es igual a:
s = v2 |Y ej9pq - V V Y ej(9pq+6P-óq) + v2 Y ej9popq p'l pq ' p' q' pq p- po
(3.2.28)
(3.2.29)

52
Separando las partes real e Imaginaria nos queda:
pq V 2 . |Y .cosíG )- V .V . Y .eos (9 +6 -6 ) +p 1 pq ^ pq' p q pq , v pq p V
Vp2 • lYpo • cos V
V2. Y .sen(9 ) - V ' . V . Y .sen (9 + 6 -ó ) +P Pq v pq' p q pq pq °p V
(3.2 .30)
V p 2 ' l Y po V(3.2.31)
3.2.2.4. Si la medic ión corresponde a f l u j o s de potencia activa ' y/o
reactiva a través de transformadores
Si la rama en cuestión contiene taps en cua lquier t e rmina l , la admi-
tancia propia del elemento se..vera afectada por este valor, entonces
2 casos deben ser considerados:
Uti l izando el circuito equivalente TÍ del transformador tendremos:
t,Yp
Lpq -
d-t )Yq
F i g . 3.2: Circui to equ iva len te ir del transformador
3.2.2.4.1. Si el l a p aparece en el t e r m i n a l - p de la rama conectada en_
tre los nodos pq.

La potencia compleja entre los nodos p-q esta dada por
S = E I*pq p pq
53
* *
Por simplicidad:
= t.V2.Y - E . E .t.Y + t(t - 1)V2.Ypq p p p q p- p p
- t.Vj.Yp
tz.V2.YP P
E*. E .t.Y = t.Y (t.V2 - E*. E )P-. q P P P P q
Si consideramos que t.Y es el valor de la admitancia del elemento pq,
incluido el efecto del tap, y la denominaremos Y , entonces:
* * /S = E t.E - E Ypq p p qx pq
(3.2.33)
en coordenadas polares:
s* = t v2 Y e"j9pq - v v . Y .e-J"(9pq+V6q)pq p" pq P q pq
Separando las componentes real é imaginaria tendremos:
P = t.V2. Y .cos(0 ) - V ,V . Y .cos(0 ' +6 -6 ) (3.2.34)Pq p pq v pq' p q pq _ pq p q'
' VV Ypq ' - Sen(9pq+ (3'2-35)
3 .2 .2 .4 .2 . SI el tap aparece en el terminal q de la rama conectada-
entre p-q
De la misma manera como se demostró el caso anter ior , la potencia
compleja para este caso es Igual a:
E p - E q ) V < 3 - 2 - 3 5 >
en coordenadas polares la ecuación (3.2.36) se escribe asi:
.ejQpq - v n .v . pq (3 .2 .37)
Separando.las partes real e Imaginaria de la ecuación (3.2.37)
nemos: • .
V 2 . Y .cosfQ \ V .V . | Y . cos(9 + 6 - 6 ) (3.2.38)p pq / po/ p q ' pq . - pq P q'
= -^- . V 2 . l Y .sen(9 J - V .V . | Y 1. sen(9 +6 -6rt) (3.2.39)t p ' pq v pqf p q ' pq [ pq p q;
3.2.3. Forma del Jacobiano
Una vez conocidas las funciones no l ineales a utilizar en el proce-
so de estimación de las variables de estado, corresponde en este mo_
mentó a n a l i z a r la ecuación (2.1.9) de . cambios en los voltajes d e - b a _
rra, la 'misma que fue obtenida mediante el método de Newton-Raphson
formal ; a saber:-
55
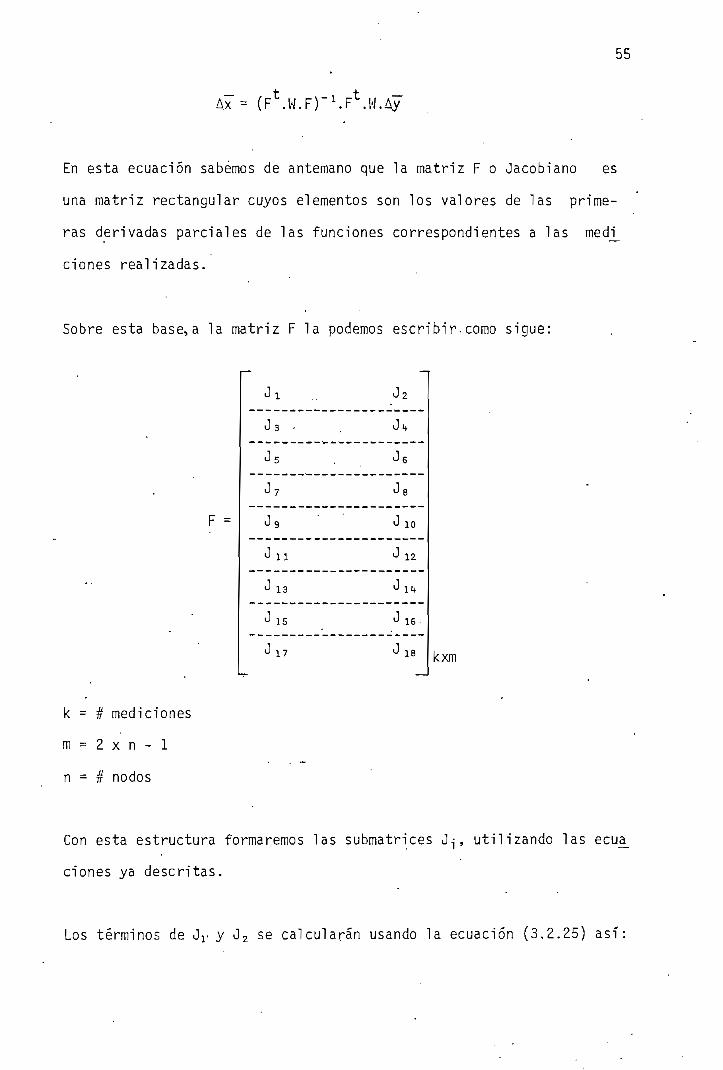
Ax =
En esta ecuación sabemos de antemano que la matriz F o Jacobiano es
una matriz rectangular cuyos elementos son los valores de las prime-
ras derivadas parciales de las funciones correspondientes a las medi_
ciones realizadas.
Sobre esta base,a la matriz F la podemos escribir-como sigue:
F =
JlO s .
Os
07
o 9 •
Jn
J 13
Jis
01 7
02
Jf
. Je
O e
0 10
J 12
ollf
O í s -
0 18 kxm
k = # mediciones
m = 2 x n - 1
n = # nodos
Con esta estructura formaremos las submatrices Jn-, utilizando las ecua_
ciones ya descritas.
Los términos de Jr y J2 se calcularán usando la ecuación (3.2.25) asi:

Los elementos de .-
9P n
^"'-¿vvv, (9pq - V
y
56
9P—V—= V V Y sen (Q -f 6 - 6 )9óq. V V pq v pq P V
Para J2 tenemos:
9P n-írTrE- = 2.V . |Y . cos(9 )+ . S V . Ynn . eos (99Vp - p ' pp ppy q=1 q pq
9P^-= V . Y . eos (9 + Ó - ÓJ9Vq P pq pq . P q
Pq
Las submatrices J3 y J^ se evalúan en base a la ecuación (3.2.26), en_
tonces:
Para
8Q n
q=1
3Q— =96
V .V . Y . eos (9 + 6rt - 6 )p q pq pq P q'
- V .V . Y . eos (9 + 6 - ó )p q pq pq p qy
y para
9Q n—ryE- = 2 . V . Y | sen(9 )+ -2 V . Y9Vp p . pq1 v PP; q=1 q pq - V

57
1^= V ' V ^ ^ p q + V V
J 5 y 0 6 se encuentran d i ferenciando la ecuación (3 .2 .30) así
Para J 5 tenemos:
V V
3P.
35,- V .V . 1Y -. sen (O n + 6
p q ' pq pq up
Para J6:
3V.pq -= 2.V . Y . cos(9 )- V . |Y eos (O + 6 - 6 ) +p pq v pqy q ' pq v pq p q
3P-.pq _3V_
- V . Y . cos (9 + 6 - 6 )p pq pq - P q
Para evaluar J7 y Je se ut i l iza la ecuación (3.2.31)
Diferenciando los términos de J7 tendremos:.
3Qpq = - V .V . Y . cos (Q + ó - 6 )p q pq v pq P q
3Qr
= VY - V

58
y para J8:
2-V Ypo
-Jí9__ = . y . Y . Sen (9 ' + 6 - fijsvn P pq pq P • q
Con la ecuación (3.2.34) podemos obtener los valores de los términos
de J9 y J Í O ; así:
Para J9: ' •
3P
96 - V .V . | Y . Sen (9 + 6 - 6 )p q ' pq pq p q;
Y Jio:
= 2 - t . V . Ynn . Cos(0nn}- Vn. Ynn . Cos (9nn + 6 - 6n)pq -pq pq pq
9 V .pq -, - V . |Y . Cos (9 + 6 - 6 )p I pq pq p q ;
De la misma manera u t i l i z a m o s la ecuación (3.2.35) para encontrar
Jn Y J i z

59
—£3- = - V .V . |Y . Cos (0 ' + s - ¿ ',86p p q I pq v pq °p V
V .V . I Y . Cos (9 + * - 6 )p q I pq pq °p V
O 1 9"12'
9Q. S , n 9 p q - V q . Y p q . 5 e n ( 9 p q + 6 p - 6 q )
3Q,3V f
- V . IY • . S e n . ( 9 + 6 - 6 )p I pq v pq °p V
Con la ecuación (3.2.38) calculamos los términos de J 13 y O 14, enton_
ees: - -
. / = V ".V . Y . Sen (9 + 6 - 6 )86n p q pq ^ pq üp V
= - V .V . Y . Sen (9 + 6 - ó )p q pq v pq . p q'
y Jj
T29-= -í-.V . Y .Gos(9 ) - V . Y .Cos (9 - + ' 5 - 6 )/ t p pq v pq; q pq v pq p q y
£3-= - V . Y . Cos (9 + 6 - Ó )p pq pq p _ q'Q .
Para eva luar los términos de J i 5 y J 15 u t i l i zamos la ecuación (3 .2 .39)
60
9 Qpq -96
9Q
- V .V . Y . Cos (O + 6 - 6 )p q pq pq p , q'
= V .V . Y . Cos (9 + 6 - 6 )p q pq pq p q'
3Q,9 V .V• . Y . Sen(t * P" pq 9 J - V . Y . Sen (9 + 6 - 6 )pq q pq pq P q
V , = - V . Y_ . Sen (9_ + & - 6n)p pq npq P- q
Por úl t imo para calcular los términos de Ji7 y J I B hacemos uso de la
ecuación (3 .2 .27) correspondiente a mediciones de voltaje de- barra;
entonces:
17
9 E
86
9 E
96.
= 0.
= 0.
y_TV = 2 V
y 9 E
9Vr= 0.
Una vez conocida la matriz F o Jacobiana podemos ya entrar a evaluar

" • 61
la ecuación de estimación de estado, y de esta manera utilizar el al_
goritmo de detección e identificación de errores en las mediciones ,
para volver con el proceso hasta obtener los "mejores estimados" de
las variables de Estado.
3.3. OBSERVABILIDAD DE LA RED Y PSEUDOMEDICIONES [10] [11 ]
Por observabilidad de una red se entiende la capacidad del Estimador
de evaluar el vector completo de variables.de estado. Un sistema-di s_
creto se dice que es observable si el vector de estado completo pue_
de ser determinado únicamente a partir de un número finito de obser_
vaciones del sistema. . .
Si consideramos que un sistema de medición está expuesto a fallas en
equipos o en el sistema de transmisión de datos, es muy probable que
en un momento dado el conjunto de mediciones a evaluar no sea sufi_
cíente para calcular el vector entero de variables de estado. En es_
te momento estaremos en-un problema, puesto que si bien se puede dis_
poner de suficiente redundancia de'una parte del sistema, no es -me-
nos cierto que otra quedará aislada provocando que el estimado del
vector de estado no tenga el grado de precisión deseado, o que en úl_
timo término la teoría de estimación no pueda ser aplicada.
La naturaleza no lineal de las observaciones hace que en un sistema
de potencia el problema de observabilidad no sea trivial, ya que no
necesariamente la observabilidad puede ser determinada por la matriz
H en la ecuación
1 = H . X" + F

62
donde una, condición necesaria pero no suficiente es que el rango de
la matriz H tenga igual dimensión que el vector de estado, (ejemplos
donde la matriz H tiene el rango completo pero que el sistema no es
observable puede darse fácilmente) sino que también se deben conside_
rar el número de transductores y su localización en la red.
De esta última parte varias condiciones se mencionarán a continuación:
- Para estimar el vector de estado completo deben ser realizadas por
lo menos tantas mediciones como la dimensión del vector de estado
lo requiere.
- Si solamente flujos de potencia activa y reactiva en las lineas son
medidas, es condición necesaria que para cada nodo,los flujos de
potencia tienen que ser medidos por lo menos en un terminal de aj_
.guna rama conectada al nodo en referencia.
- Una medición de inyección de potencia activa y reactiva en un nodo,
puede reemplazar la medición de flujos de potencia de líneas en un
terminal de cualquier rama conectada al nodo. Si los requerimien-
tos 'de un mínimo numero de mediciones no es violada, una medición
.de inyección de potencia activa y reactiva en cada nodo puede reem_
plazar a alguna o todas las mediciones de flujos de potencia en
las ramas conectadas al nodo.
- Las mediciones de magnitud de voltaje, solamente afectan al estima-
do de magnitud del voltaje del nodo en cuestión.

63
En definitiva podemos concluir diciendo que: un sistema es observable
si todos los nodos del sistema son medidos por lo menos dos veces (In
yecciones o flujos de potencia activa y reactiva), según los .puntos
de medición en los diferentes nodos y ramas, excepto para la barra
slack ya que el valor del módulo de voltaje debe medirse varias veces
para calcular el promedio.. Este último valor es usado solamente al
iniciar el proceso de" esti.mación,ya que el mismo puede cambiar en -
cualquier momento dependiendo-del grado de precisión de las medicio_
nes. De otra manera se dice que el sistema es inobservable. Esto es
llamado "Continuidad del Sistema de Medición".
La continuidad del sistema de medición es la condición necesaria y su_
ficiente de observabilidad en Sistemas de Potencia.
A menudo en un sistema de medición se pierden tantos-datos que hacen
que la red sea inobservable, lo más probable es que no se pueda 'aplj_
car la Teoría de Estimación; en este momento puede usarse un proced_i_
miento que permite al estimador continuar con el estudio del Estado
del Sistema. El procedimiento involucra la adición de mediciones que
sin necesidad de ser tomadas pueden usarse para obtener la mejor es_
timación; a estos valores se los conoce con el nombre de "Pseudomedi-
ciones".
Dado que es muy difícil predecir todos los flujos de potencia en l_f_
neas por el grado de complejidad de "la red y los cambios permanentes
debido a su funcionamiento, no se utilizan estos valores como Pseudo_
mediciones, lo mismo ocurre con los datos.de magnitud de voltaje, ya
que este valor no nos dice nada sobre el ángulo de fase; lo más usual

64
es utilizar valores de inyecciones de potencia en las barras como
Pseudomediciones, puesto que como sabemos las ecuaciones correspon_
dientes son funciones de la magnitud del voltaje asT como de los án_
gulos de fase.
En estas circunstancias preguntaremos,¿Qué valor utilizar para lo-
grar la mejor estimación?. En primera instancia podemos utilizar -
datos históricos del sistema que muestren la relación entre una car_
ga individual y la carga total del mismo. De esta manera podremos
estimar el sistema completo en.forma aproximada,conociendo la poten_
cía total a ser generada y estimando los valores perdidos. Finalmen^
te, si el estimador ha sido corrido periódicamente se pueden utili-
zar los valores estimados mas recientes como Pseudomediciones. Pero,
¿Cuál será el trato a dar una Pseudomedición?.En este caso y dado -
que la Pseudomedición puede ser muy imprecisa, lo más común es asi¿
nar a este valor una.desviación standard grande, para que de esta ma_
ñera el algoritmo de Estimación trate a la pseudomedición como un v^
lor extraído de un equipo de medición de una calidad muy pobre.
3:4. DETERMINACIÓN AUTOMÁTICA DE LA TOPOLOGÍA DE LA RED EN UN SISTE-
MA DE POTENCIA [12]
La determinación de la topología de la red en un sistema de potencia
en estado estable^ para estudios de "sal idas de líneas, es relativamejí
te un problema simple, ya que los diagramas unifilares inherentemen-
te describen la configuración del sistema.
En estudios de tiempo real la configuración del sistema es dinámica,

65
es decir, los Interruptores en una S/E pueden operar en cualquier mo_
mentó produciendo alguno de los siguientes efectos:
a) Los circuitos pueden o no ser desconectados.
b) Las subestaciones pueden o no dividirse, posiblemente formando -
nuevos nodos, de tal forma que el número total de nodos en el sis_
tema varíe, y
c) Un sistema interconectado puede dividirse en varias áreas separa_
das.
A menos que se tomen las medidas necesarias para incorporar auto_
máticamente, en tiempo real, los efectos de operación de los interru^
tores en la topología del sistema, cualquier cálculo y decisión-basa_
da en una configuración errónea puede ser peligrosa (por ejemplo, in_
mediatamente después de la ocurrencia de una falla, la cual conduce
a la operación de uno o más interruptores).
Como sabemos, para aplicar los conceptos de Estimación de Estado en
Sistemas de Potencia ya sea considerando el modelo lineal o mo_delo
de la AEP, asi como el modelo no lineal utilizando el método de New_
ton-Raphson, es necesario disponer de suficientes mediciones tomadas
en tiempo real. Así mismo, para calcular las variables dependientes
dentro del proceso de estimación es necesario conocer las ecuaciones
de red. Estas ecuaciones deben implícitamente contener información
acerca de la configuración del sistema en el momento en que las medi_
clones han sido tomadas, sin embargo si como se dijo anteriormente,
los cambios de estado de los interruptores pueden ocurrir en cual-
quier momento, entonces es necesario también automáticamente poder
reflejar sus efectos en la configuración del sistema.
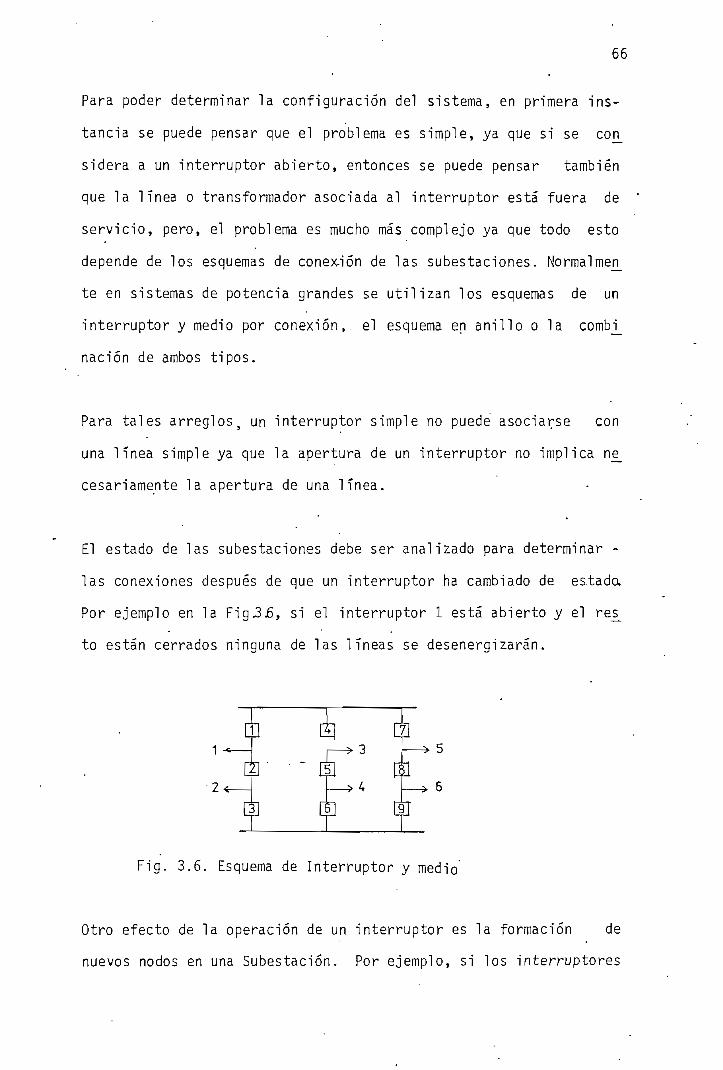
66
Para poder determinar la configuración del sistema, en primera ins-
tancia se puede pensar que el problema es simple, ya que si se con_
sidera a un interruptor abierto, entonces se puede pensar también
que la linea o transformador asociada al interruptor está fuera de
servicio, pero, el problema es mucho más complejo ya que todo esto
depende de los esquemas de conex-ión de las subestaciones. Normalmen_
te en sistemas de potencia grandes se utilizan los esquemas de un
interruptor y medio por conexión,, el esquema en anillo o la combj_
nación de ambos tipos.
Para tales arregloss un interruptor simple no puede asociarse con
una linea simple ya que la apertura de un interruptor no implica ne_
cesariamente la apertura de una linea.
El estado de las subestaciones debe ser analizado para determinar -
las conexiones después de que un interruptor ha cambiado de estada
Por ejemplo en la Fig.3.6, si el interruptor 1 está abierto y el re£
to están cerrados ninguna de las líneas se desenergizarán.
Fig. 3.6. Esquema de Interruptor y medio
Otro efecto de la operación de un interruptor es la formación de
nuevos nodos en una Subestación. Por ejemplo, si los interruptores

67
1 y 3 están abiertos, las lineas 1 y 2 se desconectan de las lineas
3.4, 5 y 6 en la misma subestación y lo que fue un solo nodo cuan_
do todos los interruptores estaban cerrados, ahora han llegado a
ser 2 nodos eléctricos.
En síntesis, los requerimientos básicos para considerar o determi-
nar la topología de la red en tiempo real son:
1. Diseñar un proceso lógico para conocer los estados de los inte_
rruptores, independientemente de los arreglos de las S/E.
2. Abrir, y cerrar líneas en el- modelo digital para reflejar los cam_
bios en el estado de los interruptores y mediciones.
3. Subdividir las S/E en varios nodos y considerarlos como S/E sepa_
radas. ••. •
4. Subdividir al sistema en varias áreas para considerar la desco_
nexión eléctrica o matemática, y
5. Das las configuraciones.necesarias para los cálculos de flujos
de potencia.
3.5. APLICACIONES ADICIONALES DE LA TEORÍA DE ESTIMACIÓN DE ESTADO
EN SISTEMAS ELÉCTRICOS DE POTENCIA .[u] [1 5]
Se ha dicho que la.base de la Teoría de Estimación radica en encon
68
trar el estado del sistema a partir de un conjunto redundante de me_
diciones en tiempo real, sin embargo esta técnica puede ser utiliza^
da en general para todo proceso de medición. Por ejemplo, la' cur.
va Entrada - Salida de las unidades térmicas en un Sistema de Po-
tencia.
Para determinar la distribución económica de carga entre varias unj_
dades térmicas dentro de un S.E.P.,es necesario conocer el costo de
operación de cada unidad en función de la potencia de salida. El
costo por combustible es él factor principal en plantas de combusti_
bles fósiles,, puesto que éste depende de la potencia que esté .gene-
rando la máquina. '
Otro de los costos 'importantes es el costo de Personal de Operación
y mantenimiento, el mismo que es considerado constante ya que es in_
dependiente de la potencia de generación. Este puede ser añadido
al costo variable por Combustible.
La curva de Costo por Combustible se determina experimentalmente -
manteniendo la generación de la unidad a un valor fijo determinado
y midiendo el Consumo de Combustible por hora, correspondiente a
esa generación. La medición del Consumo de Combustible se repite
para distintos valores de Carga.
El consumo de combustible a su vez puede transformarse en energía
calórica por hora, de acuerdo al rendimiento térmico del Combusti--
ble. 'La curva as! obtenida se denomina Curva Entrada - Salida.
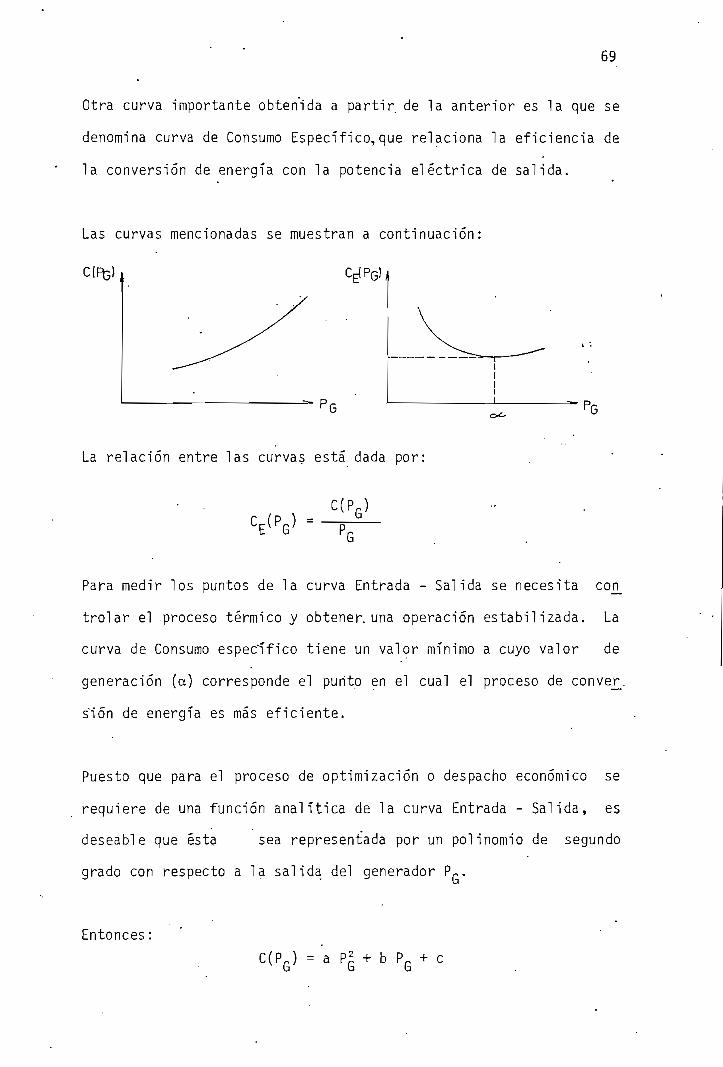
69
Otra curva Importante obtenida a partir de la anterior es la que se
denomina curva de Consumo Específico, que relaciona la eficiencia de
la conversión de energía con la potencia eléctrica de salida.
Las curvas mencionadas se muestran a continuación:
La relación entre las curvas está dada por:
C(P)
Para medir los puntos de la curva Entrada - Salida se necesita con_
trolar el .proceso térmico y obtener, una operación estabilizada. La
curva de Consumo espec'ífico tiene un valor mínimo a cuyo valor de
generación (a) corresponde el punto en el cual el proceso de converv
sión de energía es más eficiente.
Puesto que para el proceso de optimización o despacho económico se
requiere de una función analítica de la curva Entrada - Salida, es
deseable que ésta sea representada por un polinomio de segundo
grado con respecto a la salida del generador PQ.
Entonces:C(PG) = a P¿ + b PG + c

70
y
Siendo necesario determinar las constantes a, b y c para la cual se
requiere efectuar al menos 3 mediciones, en la práctica se necesi_
tan más mediciones para determinar lo más ajustadamente posible las
constantes, ya que como sabemos todo proceso de medición involucra
errores ya sea por instrumentación o por observación.
Una técnica eficiente de determinación de las constantes constituye
el filtro matemático de errores denominado "Estimación por mínimos
cuadrados", el cual requiere el planteamiento de un sistema de ecua_
ciones que tenga más ecuaciones que incógnitas para asi obtener va_
lores mas cercanos de a, b y c a los reales. Con el fin de mejorar
el proceso, es posible aún detectar e identificar una medición com_
pletamente errónea y deshecharla para que no afecte a la estimacióa
En el presente estudio asumiremos como suficiente que se dispone de
una instrumentación adecuada pero que se acepta existe cierto error
asociado. Así, si vamos a determinar la función analítica c(PP-) pab —
r'a lo cual es necesario determinar a, b y c^ supongamos que hemos
efectuado n mediciones o puntos de la curva entrada - salida.
Entonces podemos plantear el siguiente sistema de ecuaciones:
Ci(Pr) = a.P* + b.Pr + cb b i b i
C2(PP) = a.PP2 + b.Pn + cu b2 b
= a'PGn + b'PGn + c + En

71
Expresando, en forma matricial al sistema de ecuaciones tenemos:
Pr 1«2
ab
.o lo que es lo mismo:
*C = A . x" + e" .
El concepto de la mejor estimación de x = [a b c] es minimizar la
suma de todos los errores al cuadrado, asi:
e" = t~ - A . x"
min J(X) = I e?.W-= e1 . W .i=l 1
Entonces:
El mínimo de J(X) se obtiene cuando _ = O9x
por lo" que de la'teoría de estimación, el vector de las variables desco^
nocidas es igual a:
x = (At.W.A)":.At.W."C
Este mismo concepto puede utilizarse en la obtención de la curva r
sultante del generador equivalente, es decir, cuando en una central
de generación se disponen de varias máquinas con diferentes curvas
72
"de Costo, o si se considera que no' hay pérdidas de transmisión, se
puede evaluar el sistema en conjunto y obtener una curva, la misma
que será única en el estudio del generador equivalente. Este proce_
dimiento permite simplificar el tratamiento de las unidades térmi-
cas en el campo de Despacho Económico de Carga.
En cuanto se refiere al filtro de errores de medición, se-puede uti_
lizar el método de detección e identificación de errores descrito -
anteriormente o también los conceptos que se dan en el Análisis de
Correlación para funciones no lineales. Este último puede ser más
utilizado puesto que nos da la idea de la Correlación que existe en_
tre las variables que intervienen en el proceso, es decir, Consumo
de Combustible y Potencia. Más información correspondiente a' este
tema se verá en el anexo C'de la presente Tesis.
3.6. EL FLUJO DE POTENCIA ESTOCASTICO: CASO MUY PARTICULAR DE LA
TEORÍA DE ESTIMACIÓN.
En el capítulo anterior se ha realizado el análisis de la Teorfa'de
Estimación para un sistema lineal contando con suficiente redundan-
cia, es decir, más mediciones que incógnitas. En esta parte anali-
zaremos el comportamiento del Estudio de Estimación para un sistema
en el cual se tiene igual número de ecuaciones con respecto al núme_
ro de variables de estado, es decir para CERO grados de libertad Es_
te caso en estimación es llamado "Completamente determinado", [ib]
Cabe anotar que al realizar el análisis para un sistema lineal, se
demuestra de hecho su aplicación al caso no lineal el mismo que cp_

rresponde al estudio de Flujos de Potencia, Habiendo considerado -
que todas las mediciones Y están relacionadas con el estado X me-
diante la relación:
Y = f00 + e
Se tiene que analizando esta ecuación ya podemos hablar de un '(3roce_
so estocástico"", puesto que éste considera la existencia de error en
las observaciones.
Como el propósito de la Estimación de Estado es procesar un conjun-
to de información para dar el mejor estimado, entonces se llega a
obtener la ecuación:
X"= (A1 . W . A)"1.A1 . W , Y"
que es la que gobierna todo proceso de medición o de pronósticos al
aplicar el criterio de .Estimación por el método de los mínimos cua_
drados ponderados. '
Dado-que estamos particularizando el método para el caso completa -
mente determinado, concluimos que la matriz A es cuadrada, por lo
que es posible simplificar la ecuación anterior.
Entonces: X = A . Y
Como se ,ve, esta solución es igual a la que se utiliza en los cálq/
los convencionales de Flujos ya que se han eliminado aquellas matri_

74
ees que involucran la estadística de los errores asociados a las ob_
servaciones y por tanto es imposible filtrar errores de las cantida_
des medidas o pronosticadas.
Siendo el objetivo del flujo de potencia Estocástico considerar la
incertidumbre en la predicción^ en el cual las variables del proble_
ma son aleatorias, entonces es necesario conocer sus valores espera_
dos y sus respectivas" desviaciones standard. En este marco y como
se hizo en el capítulo anterior, analizaremos los resultados de los
'valores esperados y varianzas de las variables que intervienen en
el proceso. •
VALOR ESPERADO Y VARIANZA DE LAS VARIABLES DE ESTADO
Conocemos que el valor esperado de las variables de estado es igual
a:
E(X) = )ft '
y que la matriz de covarianza de X es:
Cov (X) (A1 . W . A)"1
entonces por definición sabemos que las varianzas de las variables
de estado corresponden a los elementos de la diagonal de la matriz
de Covarianzas; lo que da:
VAR ("X) = Diag (At.W.A)"1 = áv2A
75
que es una de las ecuaciones mas .importantes en el estudio de Flu-
jos de Potencia Estocástico.
VALOR ESPERADO Y VARIANZA DE LOS VALORES OBSERVADOS O PRONOSTICADOS
Del análisis realizado en el Capítulo II, tenemos que el valor espe_
rado de las observaciones es:
E (Yin) = Yt
donde Yt es el vector de valores verdaderos de las observaciones.
Así mismo, la matriz covarianza es igual a:
Cov (Ym) = A.(At.W.A)"1.At
y dado que A es una matriz cuadrada de acuerdo al caso particular -
que estamos analizando, entonces, si simplificamos la ecuación nos
queda:
Cov (Ym) = V
lo que nos muestra que la desviación del vector de observaciones es
la misma que se asume tieneel equipo de medición utilizado.
VALOR ESPERADO Y VARIANZA DE LOS RESIDUOS
Si consideramos que Ym es el vector de valores medidos y Yc es de
76
los valores calculados, entonces:
Z = Ym - Y c
Ahora b i e r ^ s i : E(Z) = . 0 y sí:
Cov (Z) = V - A ( A t . W . A ) " 1 . A t
entonces para cero grados de l ibertad vemos que:
Cov (Z) = O
Lo que implica que el vector Ym es igual al calculado cuando el numero
de ecuaciones es. igual al número de variables de estado. En esta
parte se justifica una vez más que el filtrado de errores no se pue_
de realizar para cero grados de libertad.
En definitiva al haber particularizado el algoritmo de Estimación -
de Estado para cero grados de libertad no se ha hecho sino resolver
la' parte más importante de lo que constituye el estudio de Flujos
Estocástico's en Sistemas de Potencia.
3.7, ALGORITMO DE SOLUCIÓN DE ESTIMACIÓN DE ESTADO EN SISTEMAS DE
POTENCIA
El Algoritmo para Estimación de Estado.en Sistemas de Potencia se
describe* asi:'

77
1. Resolución del flujo de Potencia convencional utilizando el méto-
do de Newton - Raphson, con lo cual se obtienen los valores espe_
rados de las variables de estado y los valores dependientes nece_
sarios para simular el sistema de medición del Sistema de Poten-
cia.
A partir.de este punto el. algoritmo puede separarse en 3 partes;
a saber:
- Estimación de las variables de estado.
- Análisis de detección de mediciones erróneas, y
- Análisis de identificación de la medición errónea.
Entonces continuando con el-algoritmo tenemos:
-. ESTIMACIÓN DE LAS VARIABLES DE ESTADO..
2. Leer todas las mediciones simuladas y las respectivas especifica-
ciones referentes a la medición.
3. Dar valores iniciales a las variables de estado e iniciar la cuen_
. ta de la iteración con 1.
4. Calcular los nuevos valores de P , Q , P y Q con los datos de
DMC y X asumidos.
Nota: E 2 no se recalcula, simplemente toma el valor:

78
- asumido, en la primera iteración, y el
- nueyo calculado en las subsiguientes.
5. Calcular los incrementos de Inyecciones, Flujos y Módulos de Vol-
taje, es decir, los términos del vector independiente A.Y.
6. Calcular los elementos'del Jacobiano (matriz F) dependiendo del
tipo de medición,en función de los valores asumidos X o X
7. Formar el vector de Pesos o Ponderaciones. En este punto sólo -
consideramos .los elementos de la diagonal de la matriz de Pesos.
8. Calcular la matriz cuadrada (F .W.F).
.9. Invertir la matriz anterior, es decir, (F .W.F)"1.
10. Resolver AX. = (Ft.W.F)" 1.Ft.W.AY.
11. Calcular el max. AX-j para i = l,2,..,,m; m = numero de variables -de
estado.
12. Aplicar el criterio de convergencia, es decir, max. AX-¡ _< e ,
Aquí hay dos posibilidades:
a) Si se cumple el criterio de convergencia: Entonces se obtiene
la "mejor estimación" y se pasa al análisis de detección de •
errores.
b) Si no se cumple el criterio de convergencia: Entonces se calcu_
79
lan los nuevos valores de las variables de estado, así:
Xi(nuevo) " Xi(¿) +AXi(calculado)
Se incrementa la cuenta de la iteración en 1 y se repite el proce-
so desde el paso 4.
ANÁLISIS DE DETECCIÓN DE MEDICIONES ERRÓNEAS
13. Calcular la función de error J(X) haciendo uso de los mejores esti_
mados obtenidos al aplicar la teoría de Estimación- de Estado. Asi
mismo calcular el numero de grados de libertad.
14. Con el valor de grados de libertad obtener el valor t. correspondierau
;te a la distribución CHI-CUADRADO para un nivel de confidencia del
99%.
15. Comparar el" valor de J(X) con t - : Aquí'hay dos criterios:u
a) Si J(X") £t . se obtiene la solución deseada, se calculan los va^j
lores dependientes de las variables de estado y termina el proce_
so. FIN
b) Si J(X") > t- se pasa a la fase de identificación.
ANÁLISIS DE IDENTIFICACIÓN DE LA MEDICIÓN ERRÓNEA
16. Una vez que se ha detectado la presencia.de una medición mala, se
80
procede a calcular la matriz de covarianza de los residuos.
Cov (I).
17. Normalizar los residuos con ayuda de los elementos diagonales de
la matriz de covarianza calculados, asi:
Yim - Yic1=1,....k
/VAR(Zi)
k = número de mediciones.
18. Buscar el mayor residuo normalizado. Una vez encontrado el ma-
yor residuo se procede a eliminar la medición correspondiente a
ese valor, es decir, la última medición pasarla al lugar -de la
medición errónea y a és.ta al final. .
19. Disminuir en 1 el valor'del número de mediciones y sacar un'men-
saje de error, indicando el número de la medición que se ha elj_
minado, tipo y a que valor corresponde,
20. Volver con el proceso de Estimación, es decir, al paso No. 3.
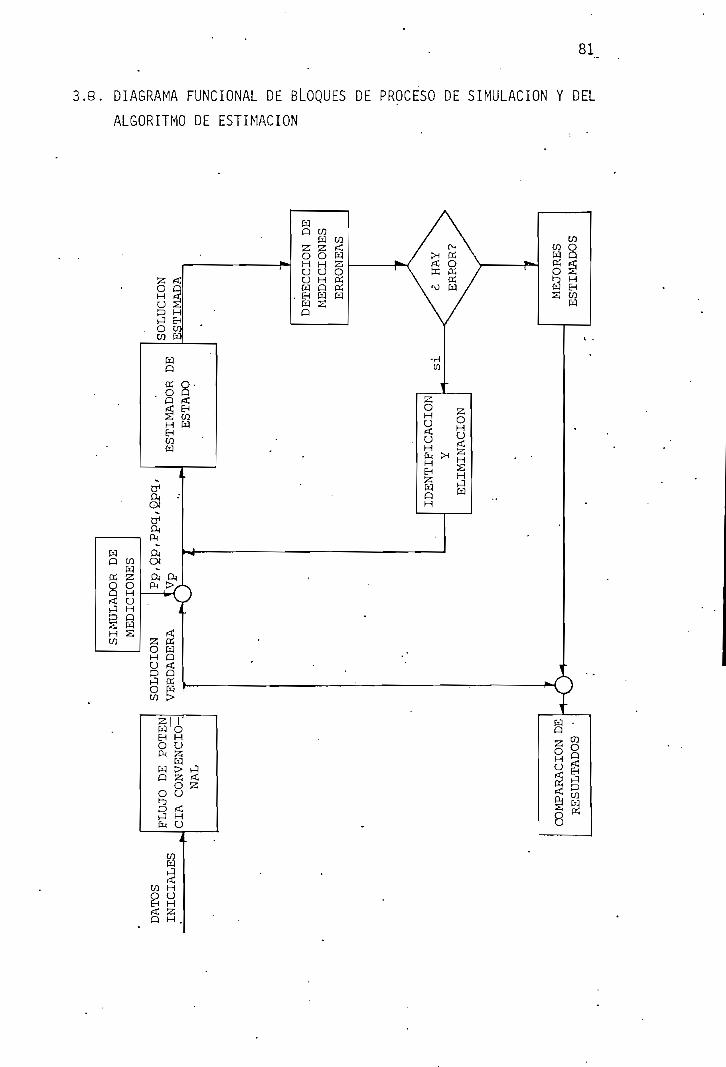
81
DIAGRAMA FUNCIONAL DE BLOQUES DE PROCESO DE SIMULACIÓN Y DEL
ALGORITMO DE ESTIMACIÓN
wwHÍ
W Ho o< 3Q H
82
CAPITULO IV
EJEMPLOS D£ APLICACIÓN DE_ LA_ ESTIMACIÓN DE_ ESTADO EN_ SISTEMAS ELIE^
TRICQS DE POTENCIA
\o que la presente tesis tiene como objetivo fundamental, una
introducción.a los conceptos de Estimación de Estado en un S.E.P.,
se presentarán a continuación varios ejemplos demostrativos donde
se utiliza la teoría anteriormente mencionada para supervisar, eva_
luar y controlar en tiempo real un sistema de potencia.
Se ha dicho que el programa digital desarrollado en esta Tesis,
desde el punto de vista de programación no es eficiente, pero lo
fundamental radica en que con él se pueden demostrar las grandes
ventajas de Estimación de Estado en análisis de sistemas de poten_
c i a.
Para comprender mejor el uso de esta teoría se estudiarán varios
casos que pueden ocurrir en el funcionamiento del S.E.P. y sus 1J_
mitaciones. Así mismo, por facilidad para el análisis se presen^
tara en cada ejemplo lo siguiente:
- Diagrama unifilar del sistema en estudio,
- Características generales.
- Datos de líneas, transformadores y Cap./Reactores.
83
- Datos de barras (Caso base).
- Solución del flujo de potencia y comparación de resultados cuan_ •
do sea posible, y
- Los respectivos casos de estudio dentro del análisis de Estima-
ción de Estado en un S.E;P.
>' .
La-última parte que es la más importante, se subdividirá a su vez
en:
- Análisis del caso.- de estudio.
- Tabla comparativa o procedimiento de prueba si se requiere.
- Análisis de resultados; y
- Algunos resultados del programa digital para cada caso.
Conviene en este momento hacer una explicación de como aparecen -
los resultados del programa digital para poder entender como ha
sido configurado el mismo.
Los resultados al' igual que el programa digital, también se encuen_
tran divididos en dos partes, 'a saber:
PRIMERA PARTE.- En esta parte-se realiza el estudio de flujos de

84
potencia convencional mediante el método de Newton - Raphson for_
mal, los resultados que aparecen son simplemente los valores que
se los toma1 como ideales o perfectos de todas las variables de
interés del sistema, calculados para simular los datos de entra-
da;al estimador y asi mismo poder incluir perturbaciones dentro
del sistema de mediciones.
SEGUNDA PARTE.- Esta constituye la parte más importante del traba_
jo desarrollado en la tesis, y sobre la cual se
centrará el análisis» ya que se simulará el funcionamiento de la
teoría de Estimación en un Centro de Control. En primera instan_
cia aparece una tabla con todas'las mediciones simuladas del sis_
tema, las mismas que entrarán a evaluarse a través de la teoría -
de Estimación. •
En caso de que dentro de las mediciones simuladas existiera algu_
na o algunas erróneas, aparecerá un reporte de los datos desecha-
dos mediante el filtro de errores de la misma teoría, las mismas
que son eliminadas del proceso para obtener la mejor, estimación.
Luego de haber procesado toda la información y de haber detectado
e identificado la o las mediciones erróneas, termina el proceso.
Entonces se muestran los valores de los mejores estimados de las
variables de estado una vez que se ha cumplido con el criterio de
convergencia tanto para el módulo de voltaje, cuanto para el ángu_
lo de fase de todas las barras del sistema.
85
A continuación aparece una tabla comparativa que contiene los v^
lores simulados y que han sido considerados en el proceso para
obtener los mejores estimados y aquellos calculados al utilizar
la teoría una vez que ésta converge.
Por último aparecerá una tabla que muestra al igual que en flujos,
los valores medios "estimados" de todas las variables de interés
(del sistema) y que servirán para tomar las acciones correctivas -
necesarias en caso de que se encuentren anormalidades en el fun-
cionamiento del sistema.
SISTEMAS EN ESTUDIO.
4.1. SISTEMA WARD AND HALE DE 6 BARRAS
Como se puede ver más adelante, éste es un ejemplo típico de un
sistema de potencia por lo cual será estudiado en completo déta_
lie, es decir, con el se probarán'algunos de los casos que pueden
ocurrir en el funcionamiento del S.E.P. y el correspondiente com_
portamiento de la teoría de Estimación frente a éstos.

86
4.1.1. Diagrama U n i f i l a r
230
4.1.2. Características generales
- Sistema en anillo .. ;
- Potencia base • : 100 MVA
- Número de barras . : 6
- Número de elementos, •: 10
- Número de barras de voltaje controlado: 1
- Número de barras de carga : 4
- Número de la barra oscilante : 1
- Datos en p.u.
- Criterio de convergencia para el flujo de potencia: 0.01
- Criterio de convergencia para Estimación de Estado: 0.0001
*NOTA: La diferencia que existe entre estos últimos valores radj_.
ca en que: Para el caso del flujo de potencia convergen_
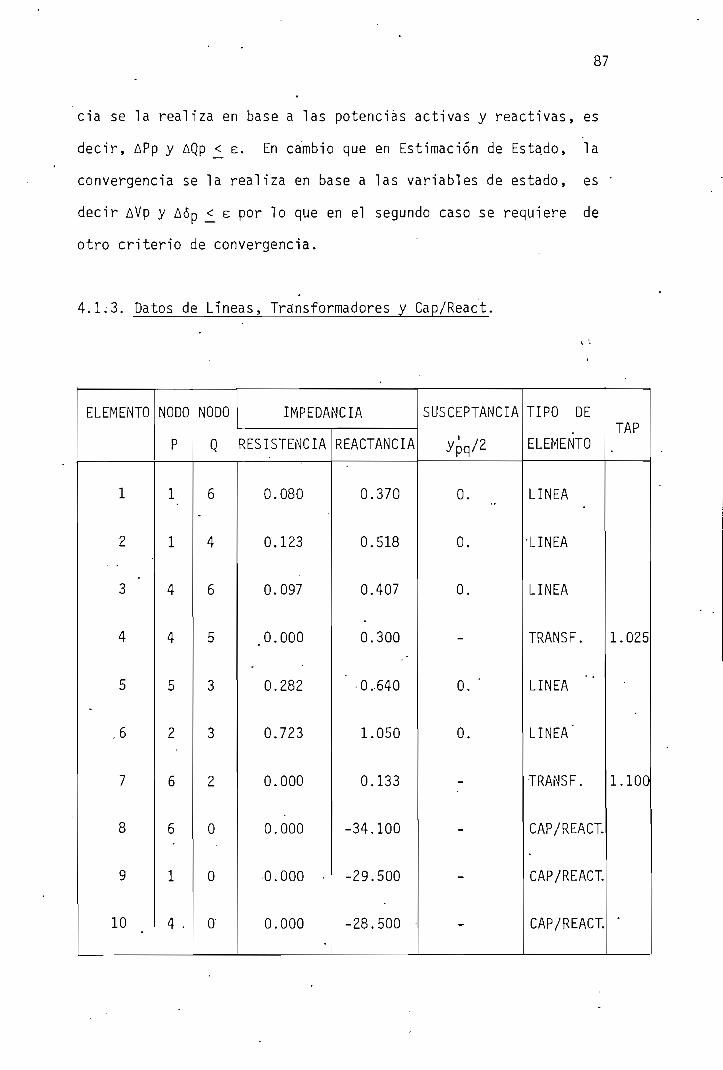
87
cia se la realiza en base a las potencias activas y reactivas, es
decir, APp y AQp £ e. En cambio que en Estimación de Estado, la
convergencia se la realiza en base a las variables de estado, es
decir AVp y Aóp £ E por lo que en el segundo caso se requiere de
otro criterio de convergencia.
4.1.3. Datos de LTneas, Transformadores y Cap/React.
ELEMENTO
1
2
3
4
5
.6
7
8
9
10
NODO
P
1
1
4
4
5
2
6
6
1
4 .
NODO
Q
6
4
6
5
3
3
2
0
0
0
IMPEDANCIA
RESISTENCIA
0.080
0.123
0.097
.0.000
0.282
0.723
0.000
0.000
0.000 -
0.000
REACTANCIA
0.370
0.518
0.407
0.300
' -0.640
1.050
0.133
-34.100
-29.500
-28.500
SUSCEPTANCIA
ypq/2
0.
0.
0.
-
0. '
0.
-
-
-
-
TIPO DE
ELEMENTO
LINEA
•LINEA
LINEA
TRANSF.
LINEA
LINEA"
TRANSF.
CAP/REACT.
CAP/REACT.
CAP/REACT.
TAP
1.025
1.100
•
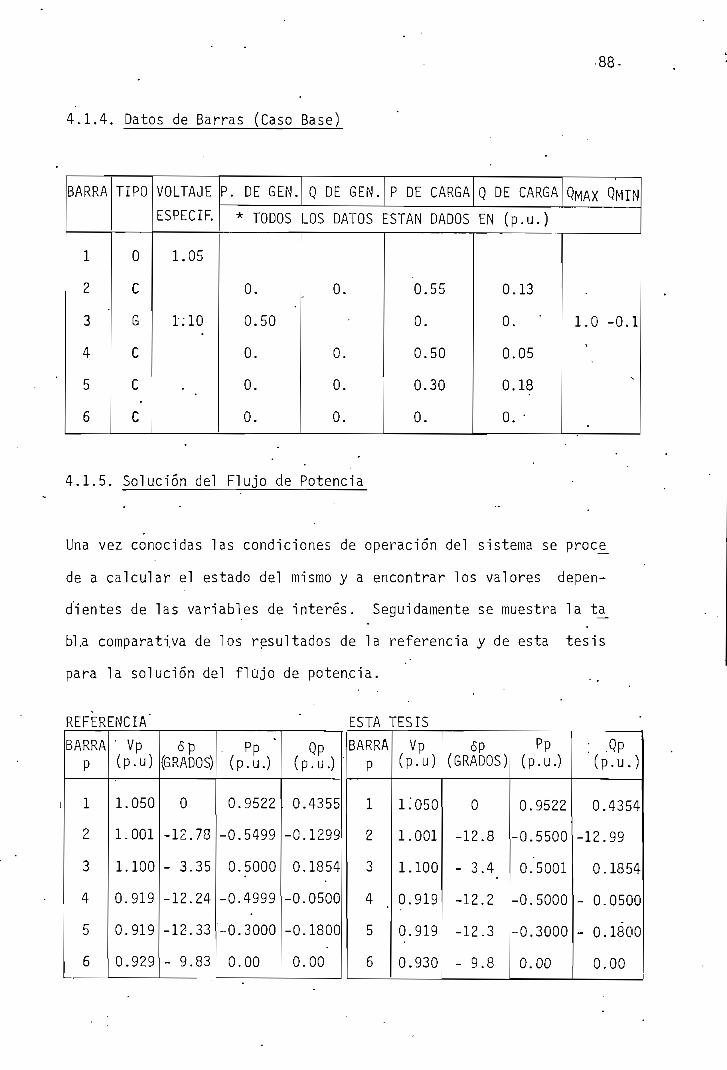
-88-
4.1.4. Datos de Barras (Caso Base)
BARRA
1
2
3
4
5
6
TIPO
0
C
G
C
C
C
VOLTAJE
ESPECIF.
1.05
1:10
-
P. DE GEN. Q DE GEN. P DE CARGA Q DE CARGA QMAX QMIN* TODOS LOS DATOS ESTÁN DADOS EN (p.u.)
0.
0.50
0.
0.
0.
0.
0.
0.
0.
0.55
0.
0.50
0.30
0.
0.13
0. '
0.05
0.18
o. •
1.0 -0.1
* •"
.
4.1.5. Solución del Flujo de Potencia
Una vez conocidas las condiciones de operación del sistema se proce_
de a calcular el estado del mismo, y a encontrar los valores depen-
dientes de las variables de interés. Seguidamente se muestra la ta_
bl.a comparativa de los resultados de la referencia y de esta tesis
para la solución del flujo de potencia.
REFERENCIA" ESTA TESIS
BARRAP
1
2
3
4
5
6
' Vp(p.u)
1.050
1.001
1.100
0.919
0.919
0.929
óp(GRADOS)
0
-12.78
- 3.35
-12.24
-12.33
- 9.83
PP :(p.u.)
0.9522
-0.5499
0.5000
-0.4999
'-0.3000
0.00
Qp(p.u.)
0.4355
-0.1299
0.1854
-0.0500
-0.1800
0.00
BARRAP
1
-2
3
4
5
6
Vp(p.u)
1Í050
1.001
1.100
0.919
0.919
0.930
6P(GRADOS)
0
-12.8
- 3.4_
-12.2
-12.3
- 9.8
Pp(p.u.)
0.9522
-0.5500
O."5001
-0.5000
-0.3000
0.00
: .QP(p.u.)
0.4354
-12.99
0.1854
- 0.0500
- o.iáoo0.00

89
4.1.6. Casos de estudio en el Análisis de Estimación de Estado
Habiendo obtenido la solución del flujo de potencia en el punto
de operación dado (que se considerará como la situación de medi-
ción o de estado perfecto), inmediatamente se enunciarán los casos
a analizar en base a mediciones que se simulan del sistema:
- Análisis del sistema de medición, considerando diferente cali-
dad del equipo utilizado.
- Aplicación del criterio de redundancia en el proceso de Estima-
ción. • •
- Determinación del máximo número de datos erróneos en un conjun-
to sobredeterminado de mediciones del sistema.
- Obtención de los mejores estimados utilizando diferente grado
de redundancia y procentajes de error moderados,
- Determinación del mínimo número de mediciones para estimar el
estado del sistema, considerando los criterios de Observabili -
dad de redes.

90
CASO 1.- ANÁLISIS DEL SISTEMA DE MEDICIÓN CONSIDERANDO DIFERENTE
CALIDAD EN EL EQUIPO UTILIZADO
Se empezará analizando el criterio de ponderaciones dado en el aj_
goritmo de Estimación por mínimos cuadrados, el mismo que consis-
te en considerar como factor de peso de cualquier medición al in_
verso de la varianza del equipo utilizado.
Para el efecto se simulará :.; un conjunto de 20 mediciones, incluí_
das cuatro erróneas y varios datos aproximados a los reales (med_i_
ciones imprecisas), con el propósito de visualizar los cambios que
se presentaren a lo largo de la prueba. El procedimiento es .el sj_
guíente:
CASO 1.1. •
Se Iniciará la prueba suponiendo que el sistema de medición es de
muy buena calidad, es decir, a <_ 1.0; lo que equivale a decir que
las ponderaciones son iguales o mayores que la unidad.
.CASO 1.2.
Aquí se considerará que todas las mediciones son extraídas de equj_
pos de igual calidad; para el análisis se tomaran valores de a-j = 1
i = 1, , 2o.
91 -
CASO 1.3.
En este paso se cambiarán las desviaciones de algunas mediciones
a- a > 1 así: O < a-¡ <. 5 ; i = 1,2, ,20.
CASO 1.4.
Luego se analizará el caso de ponderaciones menores o iguales a la
unidad, es decir: a.¡ >_ 1. i = 1,2,...,20
CASÓ 1.5. .
Por último se verá como afecta el valor de una desviación standard
exageradamente grande en el análisis de una medición errónea, y
su efecto en la correspondiente estimación.
Los valores de las mediciones y las desviaciones standard utiliza^
das en esta prueba se.tabulan a continuación:

92
MEDICIÓN
Vi
x 2 3
PS 2
Qs 3
Pl 6
Ql
. P* 1
PS 5
P»
Qs 2
Qs
Q2
Ps *
Pe
P3
V2 .
Ps 2
Vi
Q6 .
Píf 6
VERDADERA
(p.u)
1.0500
0.0255
0.1718
-0.1102
0.5091
0.4354
-0.4166
0.3283
-0.5000
0.1795
-0.1800
-0.1299
-0.0048-
0.
0.5001
1.0010
0.3958
1.0500
0.0046
-0.0883
SIMULADA
(P.u.)
1.0500
0.0300
0.1718
-0.1102
0.5100
0.4500
-0.4200
0.3100
0.4700*
0.1795
-0.1850
-0.1200
-0.0048
0.0100
0.5500*
1.0000
0.3958
-1.0500*
0.0046
-0.0110*
DESVIACIONES STANDARD
CASO 1.1
0.3
0.6
0.2
1.0
1.0
1.0
0.7
0.8 -
1.0-
0.3
o'.r0.9
1.0
0.9
0.8
1.0
1.0
1.0
0.5
1.0
CASO 1.2
1.0
1.0
1.0
1.0
1.0 .
1.0
1.0
1.0
1.0
1.0
i.o •1.0
1.0
1.0
1.0
1.0
1.0
1.0
' 1.0
1.0
CASO 1.3
0.3
0.6
0.2
1.0
1.5
2.0
0.7
2.5
5.0
0.3
2.4
3.0
1.0
2.5
5.0
1.0
2.0
1.0
0.5
1.0
CASO 1.4
1.0
1.0
1.0
1.0
2.5
2.5
1.0
3.5
8.0
1.0
3.5
5.0
1.0
3.5
10.0
1.0
3.0
1.0
1.0
1.0
CASO 1.5
1.0 .
1.0
1.0
1.0
2.5
2.5
1.0
3.5
58.0
' 1.0
3.5
5.0
' 1.0
3.5
10.0
1.0
3.0
91.0
1.0
21.0
Los valores señalados con un asterisco son los erróneos.
Al realizar las estimaciones correspondientes para cada caso, se ob_

tienen los resultados que a continuación se tabulan:
93
VERDAD.
CASO 1.1
CASO 1.2
CASO 1.3
CASO 1.4
CASO 1.5
MEDICIÓNDESHECH.
-
VlsPttjPifSsPs
V P P PV 1 ' r »t > r if 6 > r3
V P PV l »rlf >rlf6
Vi,?*
-
VARIABLES DE ESTADOVi
1.05
1:051.051
1.050
1.052
1.051
oí
0.
0.
0.
0.
0.
0.
V2
1.001
0.998
0.999
0.999
0.998
0.999
62
-12.8
-12.9
-12.8
-12.8
-14.0
-12.9
V3 ^
1.10
1.093
1.090
1.095
1.093
1.095
63
-3.4
-3.3
-3.5
-3.2
-4.0
-3.3
v.
0.919
0.917
0.917
0.917
0.923
0.917
54
-12.2
-12.2
-12.3
-12.3
-11.7
-12.3
V5
0.919
0.915
0.914
0.914
0.925
0.915
65
-12.3
-12.1
-12.3
-12.4
-11.8
-12.4
V6
0.93
0.927
0.928
0.928
0.927
0.928
65
-9.8
-9.9
-9.8
-9.9
-10. E
-9.9
Antes de realizar el análisis de la prueba, se hará una breve'ex- '.
plicación del significado del valor de la desviación standard de
un equipo de medición y la clasificación de éste de acuerdo a su
calidad.
Considérese a un equipo de medición con las siguientes caracterrs_
ticas:
- Medidor a escala completa 100 (Unidades); (VOLTS, WATTS', VAR,..)
Precisión del medidor + 3 (Unidades)
Si se parte del hecho de que los errores del equipo de medición es_
tan distribuidos con una función densidad de probabilidad normal ,
entonces se verá que el intervalo en el que' se encuentre su valor
94
verdadero estará centrado sobre 100 _+ 3 aunidades para un 99% de
confianza. .
Con esto se tiene que si la precisión del medidor es dé +_ 3 unida_
des, la desviación standard del equipo será de la unidad, es de-
cir, CF! unidad. Con esta introducción, en el análisis se clasi-
ficará a todo equipo de medición .así :
- Equipo de muy buena calidad:
- Equipo de buena calidad : cf=l
- Equipo de mala calidad : g>}
ANÁLISIS "DE RESULTADOS
A continuación se muestra como afecta el valor de la desviación s_
tandard en la estimación:
En el caso 1.1. se ha considerado el uso de equipo con CK!, lo que
implica un buen sistema de medición.
Observación: Tener un buen sistema de medición no significa néce_
sariamente que todas las mediciones sean correctas,
ya que cualquier equipo de buena calidad en algún momento puede
sufrir algún desperfecto o puede estar descalibrado, por consi- -
guiente la medición puede ser errada o también imprecisa. En es-
ta prueba al hablar de un "buen sistema", se estará refiriendo a
la calidad del equipo más no de la medición.

-95
Al analizar la estimación realizada se puede notar que el resulta_
do es bastante bueno a pesar de que hay mediciones imprecisas. Es_
tas mediciones imprecisas al compararlas con los valores verdade_
ros mantienen un pequeño rango de error. Sin embargo, hay 4 medj
ciones que en realidad si son erróneas, las mismas que han sido
correctamente deshechadas durante el proceso por ser inconsisten-
tes con las demás.
En el caso 1.2. se han elevado los valores de las desviaciones _ T
standard a 1, lo que significa que se esta utilizando equipo de
igual característica. Aquí también se han deshechado las 4 medj_
ciones erróneas, a pesar de que los estimados pierden un poco de
precisión. Esto se debe a que las mediciones imprecisas ya produ_
cen efecto por el uso de equipo de menor calidad.
En el1 caso 1.3. se han aumentado los valores de algunas desviacio_
nes standard, en especial en aquellos valores con mayor error..-
Ahora ya se puede apreciar un cambio significativo en el proceso
y es que en esta estimación ya no se ha deshechado a la medición
P3. Como podemos ver a este medición se le aumentó su valor "de
0p = 1 a ap = 5.0 (Calidad de equipo pobre) lo que implica una
disminución del factor de peso y consecuentemente la pérdida de
importancia de esta medición en la estimación.
En el caso -1.4. se ha aumentado los valores de desviación standard
de todas las mediciones a a-¡_>l. Aqui se puede'notar que otra me_
dición no ha sido deshechada y por la inclusión de éstas en la es
96
timación el resultado obtenido es. menos preciso que los anteriores.
También puede decirse que se ha disminuido la calidad del equipo
de medición, utilizando para el efecto valores un tanto exagerados
de •. Por último, en el Caso 1.5. se ha aumentado en forma despro_
porcionada las desviaciones standard de los datos con mayor error
y que no han sido deshechados todavía en las anteriores estimacio-
nes. Así, se ve que al realizar la estimación pertinente, ya no
se ha deshechado ninguna medición y al comparar la solución con la
obtenida en el caso anterior se nota un acercamiento a los valores
reales. -Con esto se concluye diciendo que a medida que la desvia_
ción standard aumenta, la medición'conrrespondiente a esa desvia-
ción va perdiendo importancia en el análisis de estimación y que
solamente puede ser tomada en cuenta como relleno para aumentar el
grado de redundancia; más, como se ha podido apreciar, su efecto
es la estimación es despreciable.
Debido a esta característica, cuando una medición se ha perdido y
debido a la falta de redundancia es necesario reemplazarla por
otra (Pseudomedición), se recomienda dar a la nueva medición un va_
lor bastante grande de a.para, que de esta manera no afecte en la
estimación.
Los resultados del Caso (1.2) y (1.5) se muestran a continuación.
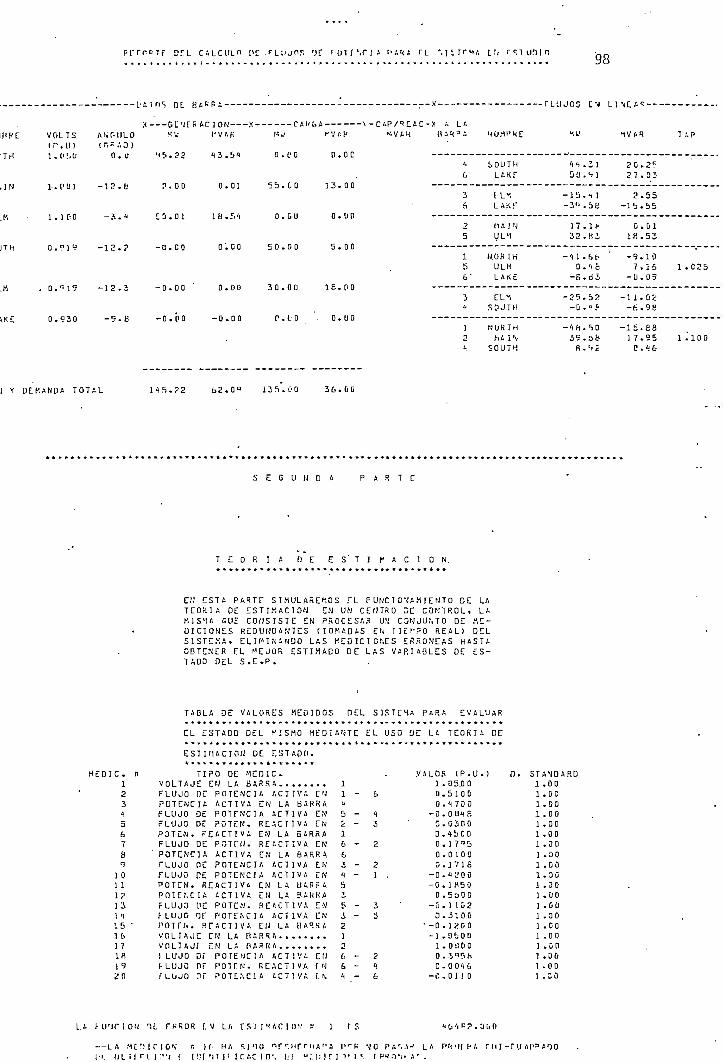
£?n. CALCUl . f i í» rL
Ml 'PC V O L T Sir. u>
0 T H I . {• h U
A 1 N 1- • l1 U J
L M • 1 . 1 P 0
UTH 0 . "1 9
L K . 0 . n 1 9
A K E 0 .930
- — —— --LT. IM> ÍIL ti * • " "*• -~— ' • _ -. " *
:< GC'if S A C I O W X C A f f í í A -X - C Ap /=?£ A C - X A LA/iNT-IJLO MV I ' V A R Mv? MVÍ Í * " - V A K { ÍA^A( r, « A D í
f.
&2
5
' 156'
ti
— 9 * 8 — D . O O -~0.00 p .L 'O - D . U O _ — — — — — _-124
'íÜHí^E
Í, Olí TULAKf
IL".
LAKÍ'
M A i M
ULM
N.ORTHULHLAKE
ELISDJTH
rj u R T HNA I\H
- t L U J U J L r* 1
MU
4 4 . 2 150. Vi
-Jb.i I-3<;.5K
17..1P32 . H i
-41. 6b '0 . A c
— 6 . tí j
-25.52-0 . f P
-Ifu'iO35 .D&
8 . [ >S
_ ! ^ L /•
20?7
?
-ib
G1H
-97
-0
-11-6
-1517
0
R TAP
.2C
.02
.55
.bu
.01
.53
.•10
.16 1 .C25,Ü5
.02
.98
.es
.95 1^100
.46
M Y D E M A N D A T O T A L 3 4 S . P 2 f a 2 . 0 9 J 3 ñ . & 0 3 & . O D
S E G U N D A P A T E
T E O R I f i D E E S ' T I f A C I O N .
EN E S T A P A R T T S IMULAREMOS FL FUNCI O V A M T E W T O DE LAT E O R Í A OE ETSTI.1ACION CN UN C E N T R O ^C C O K T R O L í LAKISIft CUE C O N S I S T E EN P R O C E S A R Uí! CONJU.MO DE HE-UICIONES REDUJJDAfJTES ( T O M A D A S Efv T I E M P O R E A L ) DELSISTEMA, ELIMINANDO LAS KED1CIO.SES ERRÓNEAS H A S T AOBTENER ffL MEJOR E S T I M A D O DE LAS V A R I A B L E S DE ES-T A D O DEL S.E.P.
T A Q L A DL V A L O R E S MEDIDOS PEL S I S T E M A P A R A E V A L U A R
MEDIC.123
678O
10U1?1 3l'(151617IB19Í-'O
CL ESTAOO DEL ^ÍSHO Hfc'DIAfjTE EL USO DE LA TEOKIA OE
ESTIMACIÓN DE ESTADO.
TIPO DE MEtHC.
FLUJO DEPOTENCIAFLUJO DEFLUJO DEPOTEN. FFLUJO DEPOTENCIATLUJO nrFLUJO HEPOTCN. RPOTE.':CIAFLUJO ['Ef LUJO nr
POTENCIA ACTIVA CNACTIVA EN LA BARRAPOTENCIA A C T I V A ENPOTtN. REACTIVA EN
EACTIVA EN LA BARRAPOTCiJ. R E A C T I V A ENACTIVA EN LA B A R R APOTENCIA ACTIVA E K'POTENCIA ACTIVA EN
E A C T I V A LN Lft ÍJAPFAA C T I V A EN LA B A R R APOTCW. REACTIVA EMPOTENCIA ACTIVA EN
POTEN. R E A C T I V A EN LA N A R R Av o L I A J EVOLTA jf¡ LUJO nrFLUJO nrFLUJO nr
P O T E N C I A A C T I V A ENPOTEN. R E A C T I V A fMí>OT£.\ciA A C T I V A ¡.\ -
a
5. -£ ~
1
6 -&3 -<\5i
í> -¿ -212& -6 -¡i -
6
43
2
21 .
35
246
.VALOR ÍP.U.)1 . 0 SO 0D.51000.4700
-0 . 0 CJ4 fiC.Q3003 .4 bCO0. 17^50.01000.1716
-0.4L'00-G.1H500.5DDD
-0.11020 . 3 1 0 D
• ~ o . i y. c, o- 1 , 0 !j 0 01 . 0 1! 0 0
C.Q046-0.0] 1 0
0. STANDARD1 _ nn11111111I111111
111
.00
.00
.00
.00
.00
.30
.00
.03
.00
.00
.00
.00
.00
.00
.00
.30
.00
.00
LA f i i ' j r iow ni f p R O R f. v LA C S T I M A C Í » " » j rs
— L A M £ ! ! i r i O \ r, J f HA f, ] ' ] O "f r Mf r n j f< A ("- R 'iO
í't. U L i f r L i í ' - j f l f ? f *íi J ' KftC I o% i.-í v.-j; j r ¡,-,. 11 t (.A f M I -r IJ AP« ATO
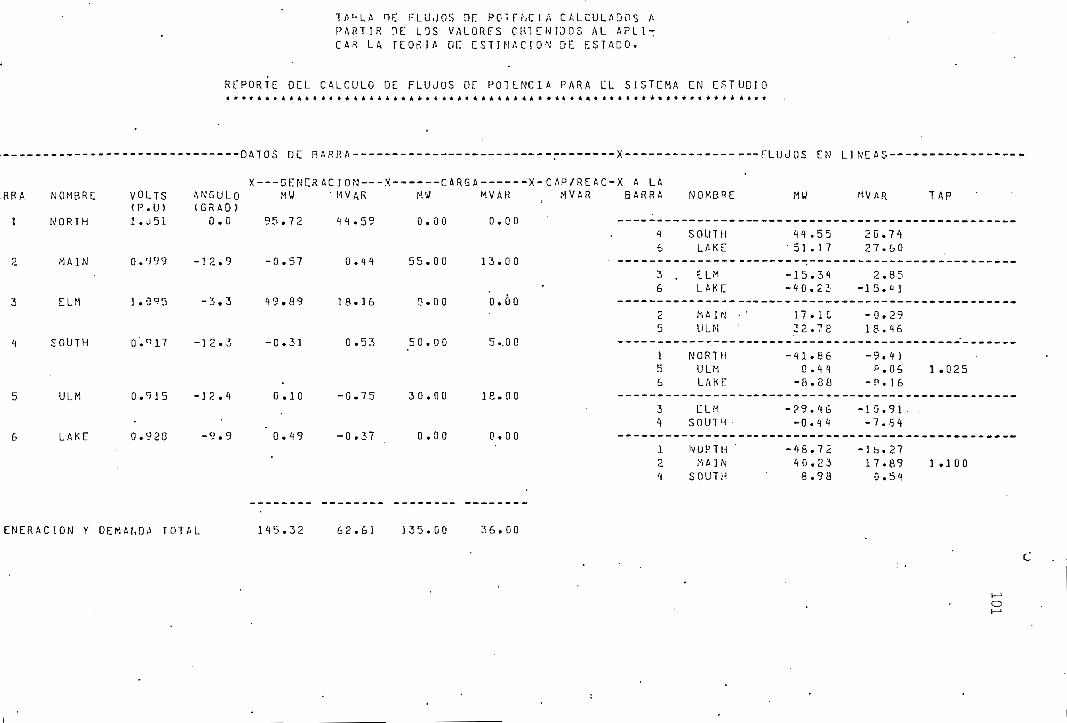
TÍ--
LA nc FL
UJOS
nr
PCTF
NCIA
CA
LCUL
ADOS
A
PART
IR PE
LO
S VA
LORE
S OB
TENI
DOS
AL AP
LI-
CAR
LA
IEOR
JA DE
ES
TIMA
CIÓN
DK
ES
TACO
.
REPO
RTE
DEL
CALC
ULO
DE FL
UJOS
or
PO
TENC
IA PA
RA L'
L SI
STEM
A EN
ES
TUDI
O
X G
EN
ER
AC
IÓN
X
CA
RG
A X
-CA
P/R
EA
C-X
A
LA
RP
A N
OM
BR
E
VO
LT
S
ÁN
GU
LO
M
W
' M
VA
R
MW
M
-VA
R
MV
AR
B
AR
RA
(P.U
) (G
RA
O)
I N
OR
TH
1 •
J 5
1
0.0
9
5*7
2
11
*5
9
0.0
0
0.0
0
-------
1 6 3.
_ '
6 2 54
SO
UT
H
Q.q
17
1
¿ •
3
0*3
1
0.5
3
50
.00
5 ..
0.0
-~ 1 5 6
• •
3 1 2 4
•
SO
UT
HL
AK
E
. E
LM
LA
KC
ti A
] rj
UL
M
N 0
R 7
HU
LM
LA
KfT
EL
MS
OU
TM
NU
RT
HW
A ]
i\S
OU
TH
< *
HW
11
- 51
-15
-10 17 22
-11 n
-B
-?9
-0
-16 10
• 8
MVA
R TA
P
.55
.1 7
.31
« 2 i
.1C
.78
.66
.11
.88
.Ib
.11
.72
.2$
.98
2 0
27 2
-15
-
Q
18
-9p.
-n
-1 0 -7
-Ib 17 0
.71
.60
.85
.U .29
.16
.11
.06
1
.02
5.1
6
.91
. -
.81
.27
.89
1
.10
0.5
1
'ENERACTON
Y DEMANDA
TOTAL
115.32
62.61
135.GO
36.00
102
CASO 2. APLICACIÓN DEL CRITERIO DE REDUNDANCIA EN EL PROCESO DE
ESTIMACIÓN DE ESTADO '
En el desarrollo de la teoría de Estimación de Estado, se ha men_
cionado con bastante frecuencia que la redundancia del conjunto
de mediciones debe ser suficiente para lograr una buena estima-
ción» considerando que hay valores que pueden ser erróneos o que
pueden perderse por falta de comunicación entre los diferentes lu_
gares del sistema con el Centro de Control. En esta circunstan-
cia primeramente se verá como afecta el incremento del número de
mediciones en la estimación para poder extraer alguna conclusión
sobre el tema.
Para el efecto se empezará con un conjunto de 20 mediciones, in-
cluyendo 4 datos erróneos y varios valores aproximados a los ver_
daderos, luego se irán aumentando progresivamente mediciones en
pasos de 5 hasta obtener la máxima redundancia posible (El máximo
número de mediciones que puede vtomarse del sistema es 46, pero
para realizar la prueba se considerarán 50). Claro está, que las
mediciones que se incluyan serán valores medios de las variables
de interés del sistema (inyecciones de potencia en las barras, voj_
tajes y flujos de potencia). Para visualizar mejor los resulta-
dos obtenidos, se tabularán los estimados de cada prueba así:
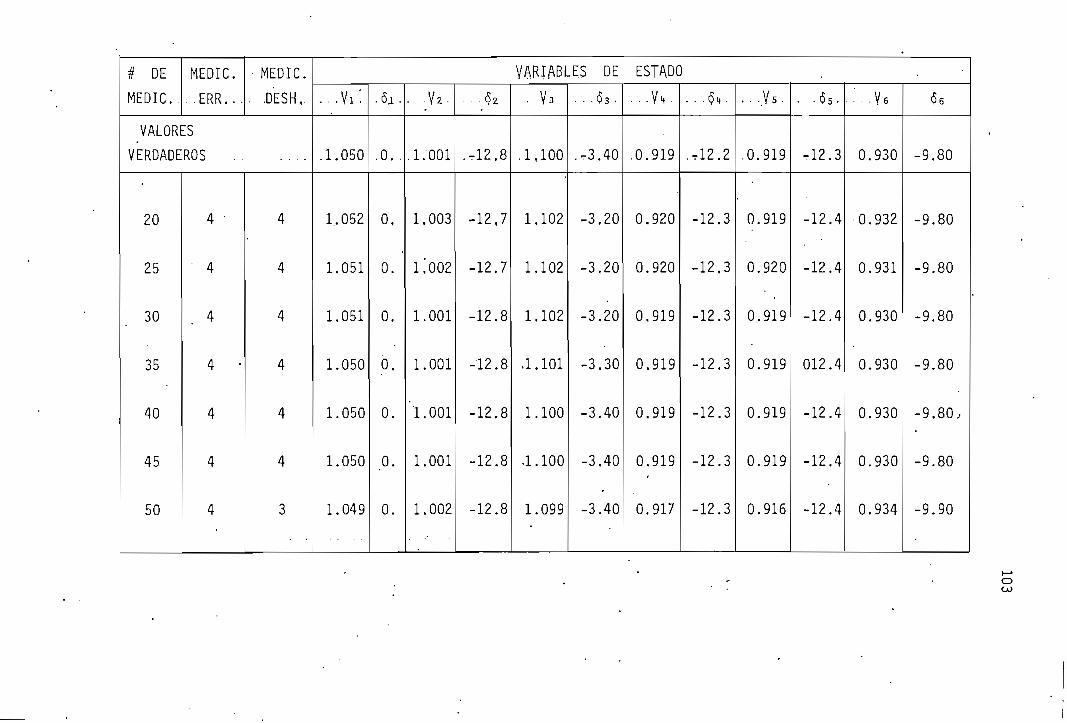
# DE
MEDI
C. .
MEDI
C.
-.ER
R...
• MEDIC.
. .DE5H,.
VALO
RES
VERD
ADER
OS
20 25 30 35 40 45 50
4 '
4 4 4 •
4 4 4
4 4 4 4 4 4 3
VARI
ABLE
S DE
ESTADO
.
.
...Vi:
.1.050
1..052
1.051
1.051
1.050
1.050
1.050
1.049
•«A.
.0. .
0, 0. 0. 0, 0. .0- 0.
. -V2.
.1.001
1.003
l."002
1.001
1.001
'l.OOl
1,001
1.002
. . . íz
.,12,8
-12,7
-12.7
-12.8
-12.8
-12.8
-12.8
-12.8
. Va
.1,100
1,102
1,102
1.102
1,101
1.100
1.100
1.099
3
.-3.40
-3.20
-3,20
-3.20
-3,30
-3.40
-3.40
-3.40
. ..
Vi.
.0.919
0.920
0.920
0,919
0.919
0,919
0.919
0.917
r
.,12.2
-12.3
-12.3
-12.3
-12.3
-12.3
-12.3
-12.3
Ys
.0.919
0.919
0.920
0.919
0.919
0.919
0.919
0.916
. . .
65.
-12.3
-12.4
-12.4
-12.4
012.4
-12.4
-12.4
-12.4
y *
0.930
0.932
0.931
0.930
0.930
0.930
0.930
0.934
<56
-9.80
-9.80
-9.80
-9.80
-9.80
-9.80,
-9.80
-9.90

104
Apreciando los resultados que se muestran en la tabla anterior, se
puede ver -que en realidad a medida que aumenta la redundancia del
conjunto de mediciones simuladas para evaluar el estado del sistema
aumenta también la precisión de los estimados. Sin embargo, en la
estimación de 50 mediciones se nota un alejamiento de los resulta_
dos respecto a los valores reales; esto se debe a que no es conve_
niente elevar demasiado la redundancia, puesto que al incrementar -
excesivamente a ésta, los grados de libertad de la prueba también
aumentan, por consiguiente el valor tj de la distribución CHI - CUA
ORADO es más grande lo cual hace que mediciones con un error apre-
ciable (en este caso el valor de Q& = 0.1 p.u.) se incluyan en la
estimación, provocando de. esta manera una distorsión en los estima-
dos.
La estimación mejora si se aumenta la desviación standard de las me_
diciones con mayor error (Véase la siguiente tabla).
En esta tabla se muestra que aún cuando se eleve el valor de las des_
viaciones standard para mejorar la estimación, el dato Qs que es -
errónero sigue afectando en la solución al no ser considerado como
tal. . . „
De todo lo enunciado en el análisis de este caso se puede decir que
una., redundancia máxima de 3 es suficiente para estimar el estado de
un sistema, sin embargo no es indispensable, ya que dependiendo de
la calidad del sistema de medición y comunicación este valor puede
ser menor.
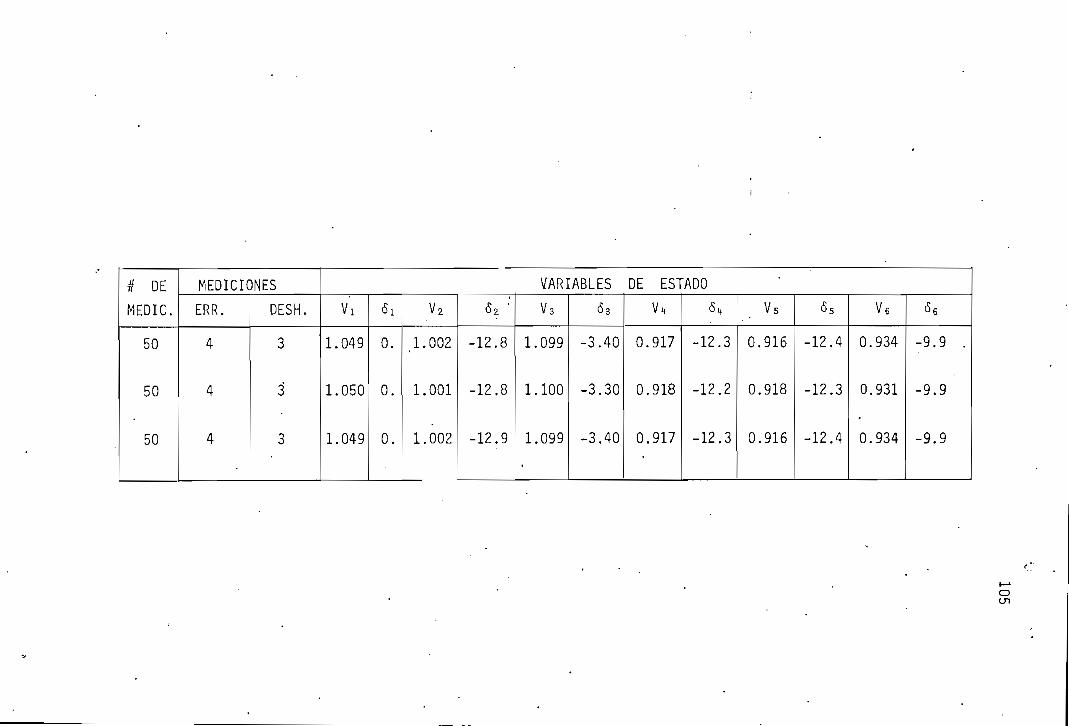
í DE
MEDI
C.
50 50 50
MEDI
CION
ES
ERR. 4 4 4
DESH.
3 3 3
VARI
ABLE
S DE
ESTADO
Vi
1.049
1.050
1.049
61 0. 0. 0.
V*
.1.002
1.001
1.002
62 '
-12.8
-12,8
-12.9
V3
1.099
1.100
1.099
63
-3.40
-3.30
-3.40
Vi,
0.917
0.918
0.917
6,
-12.3
-12.2
-12.3
vs
0.916
0.918
0.916
65
-12.4
-12.3
-12.4
V6
0.934
0.931
0.934
<56
-9.9
.
-9.9
-9.9

4 C I O '-i
P A R T E M*'JL¿«EMCS FL F U N C I O N A M I E N T O . DE LATEÜKlA DE CSTlí í f lCIPí» E.'/ U.\O 0£ CONTROL, LA
HIS/.A DIJE CON.1ISTF LA1 P R O C E S A R UV CONJUNTO 3E Ht-P IC IONES PEDuwoA' i i r r . ( T O P A B A S E*J T I CAP 3 R C A D DELS I S T E M A , EL I 'MMAWnP L A S *LMC10\ES C f - R O N E O S H A S T AOBTENER EL MEJOR ÍS7 IMADO DE LAS VARIABLES OE ES-T A D O DEL S.E.P.
111
T A R L A DE V A L O R E S cromos DEL SISTEMA P A R A E V A L U A R
FEP1C.1?
lou12121$151617IB192021?223
?£2728293031323334353637332940
4546«7484?50
• LL ESTADO DEL MISMO MEDIANTE
ESTILACIÓN. OE ESTADO.
TIPO DE HEDIC.POTENCIA ACTIVfl EN LA EA°RAPOTFN. R E A C T I V A EN LA B A R R A= 3TE.';CIA A C T I V A EN LA B A R R A .FLUJO DE POTENCIA A C T I V A £ N
FLUJO DE POTENCIA ACTIVA EN^LUJD DE" POT-T'J. PEACTI.VA f f jFLUJO DE POTEN'. REACT.IVA EN
FLUJO DE FUTEN. REACTIVA EUFLUJO DE POTENCIA ACTIVA ENPOTENCIA ¿CTIVi EN LA B A R R AFLUJO DE POTENCIA AC T I V A £vFLUJO DE' POTEN. REACTIVA £ \FLUJO DE POTEfcCJA ACTIVA E\. P E A C T I V A EN LA P A R R A
POTEN. REACTIVA EW LA B A R R APOTEM. R E A C T I V A - EN LA B A R R AFLUJO Qt POTEN. REACTIVA EN
POTE:-.CIA ACTIVA EN L¿ B A R R APOTEN. R E A C T I V A EN -LA B A R R AFLUJO DE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO 0£ POTENCIA ACTIVA L','FLUJO DL POTENCIA ACTIVA ENFLUJO DE «OTEN. REACTIVA E.VFLU'JO DE POTEN. R E A C T I V A fNFLUJO DE POTEN. R E A C T I V A EN'
FLUJO DE POTENCIA ACTIVA ENFLUJO DE" POTENCIA ACTIVA EN
FLUJO DE POTENCIA A C T I V A EHFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA" ENFLUJO DE POTEN. REACTIVA £\A .ACTIVA EN 'LA B A 9 R A
FLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA EN LA B A R R AFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA A C T I V A £N
POTENCIA ACTIVA EN LA B A R R A
FLUJO DE POTENCIA AC T I V A ENFLUJO DE POTENCIA ACTIVA ENPOTEN. R E A C T I V A EN LA B A R R A
1£fiZ -c
1 -G -1 -ti? -1 -1S -2 -4 -514 .5 -1
16 -6- -4 -1 -2 -3 -6 -23 -5 -16 -1 -2 -3 -5
E _
T _
T
1 -
2 -3264 -6 -2
EL USO
2
62&
36
433
3
14&46c.
1
23
24
• 3 .2
45
16
51
DE LA TEQK7A DE
VALOR (P.U.)0.95220.10000.00020.17180.9193
-0.60000.1795 .3.270C0.92000.03000.50910.0100
-D.OD5G0.0255
-0.420G-0.18000.1900
-0.0500-0.1102—1.0500-0.45590.4354-0.1583O.GD4&
-0.05330.4431-0.15550.1653
-0.15881.0010.0.1715-0.29521 .05CO0.39580.2025
-0.1541; 0.0001
-0.30001.1000
-0.06980.32S30.5001
-0.0910-0.39581.1000
-0-55000 . 930 ü2.0048
-0.4850• -0.1299
STANDARD1.002.501 .001.001 .001.501.001 .201.202.001.005.001 .552.001-5C1 .001.20i .001 .005.001.10.1.33
300000GO00JO
l.QO1 .051 .001-031.50l.GO1.00i.001.3C1 .JO1 .30a.aci.001.00S .001.001 .001 .001 .001 .001 .001.00
LA FUNCIÓN DE ERROR LA ESTIMACIÓN' ES 7 1 2 0 . 6 4 0
— LA MEDICIÓN a <i HA SIDO D E S M E C H A D A POP NO P A S A R LA PRUEBA CHl -CU AD* ADO
PE DETECCIÓN E IDENTIFICACIÓN DE ".EDICIONES ERRÓNEAS. .
C O R R E S P O N D E A: FLUJO DE P O T E N C I A A C T I V A E N LA L INEA 1- 6 Y SU V A L O R =-0 .£ ,OÜOE 00
LA FU'JCION DE E R R O R f \A E S T I M A C I Ó N e ES 2127.030
— LA ME3ICION a 20 HA Sino DESMECHADA POR NO P-ASAR LA PRUEBA CHJ-CUADRADOnE DETECCIÓN E I D E N T I F I C A C I Ó N DL MEDICIONfS ERRÓNEAS.
CORRESTONfíE A: VOLTAJE EN LA f-/.RR/. 1 Y 5u VALOR ES =-0.1050E 01
CHRQR t\A r',
ION n ir u/. °tt'i;
^ O T r ' l C I A A f . l l V f Ef. L / f íA f 'A 1 Y SU VM.'-'- r"> s " . !
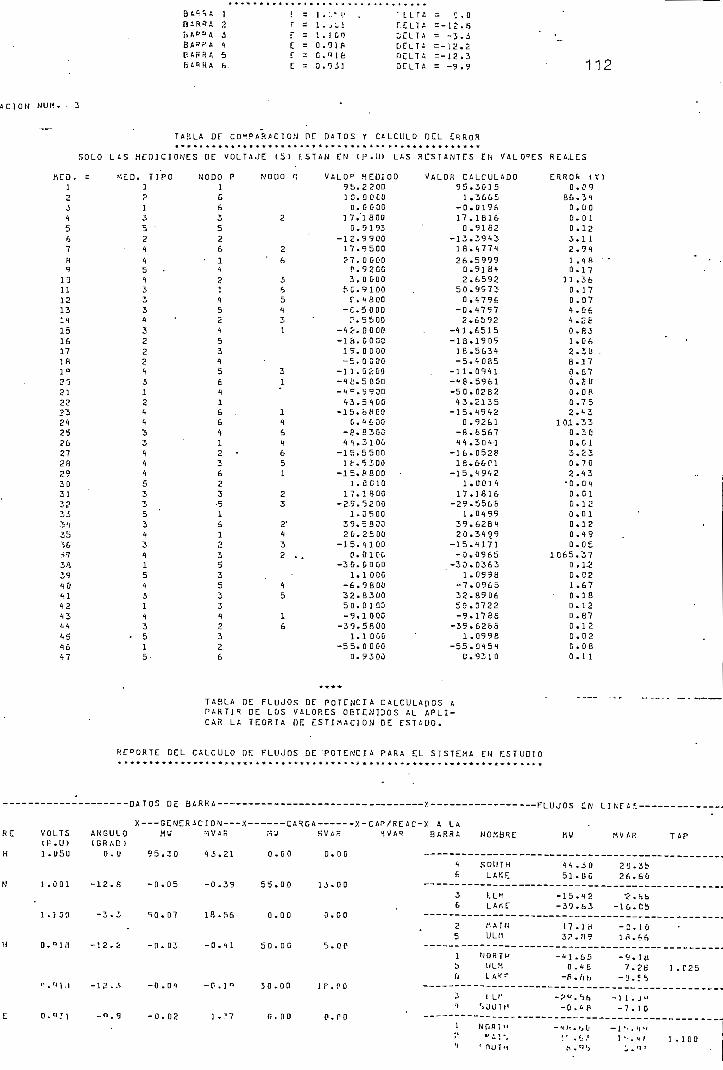
.6¿.^ A 1
B ¿ R » A 2! = 1 .: . ' C
T = 1. j - 1
r = i. 111c = 0 .91*r = c . n j f cE = 0 .9- i ]
' L L T a s c . Of . C L T A =-12.8
=-12 .2=-12.3
D E L T A = -9.9 112
A C I O M N U H ,
T A B L A DF C O M P A R A C I Ó N DE D A T O S Y C A L C U L O DEL E R R O R
K E D .1
U121314151617Ifl3°20212222242526272a29SO313?
35*,6r73139404112
1047
¿S M E D I C I O N E S
«E 0 . T I P O3?135 '2*45 •432
34322213124433444533534341543143
• 515-
D E
M O D O1e.635
26142145245i
45É4166412•j623•51&123535334232&
V O L T A J E ( 5
P N O D O
2
2' 6
3&5431
31
"
. • 1. 4
64&51
23
2't32
45
1&
) I . S T A I J EN (P .U) LAS
1 V A L O D H E D I D O9 b . 2 2 0 D1 O . Q D C O
0 . O O O D17. '1800
D . 5 1 93-12 .9900
1 7 . 9 5 0 D? 7 . 0 0 0 0
P . 9 2 G G3 . 0 0 D O
P C . 9 100C . 4 B O O
- C . 5 0 0 0P . 5 5 Q O
-42. 0 0 0 0-1 &. 0 00013. 0 0 0 0- 5 . 0 G O O
-11 .0200-4 ¿:. 5 000- 4 C . 9 9 D O
4 3 . 5 4 0 0- I b - b f l C O
& . « 6 0 G-e. 33004 4 . 3 1 0 0
-15.5500l l - . ' j i O O
-15.8800i . a c i o
17.1800-2-9 .5200
1 .050039,53032 0 . 2 5 0 0
-15.4100P . 0 1 C C
-3 D. 00 001 . 1 D O C
-6.980032.830050 .0100-9.100C
-39.58001 . 1 0 G O
-55 .00000 .9300
R t T S T A M T E S E N V A L
V A L O R C A L C U L A D O95.3015
1.3&Í.S-0.019617.1816
D.91S2-13.3943
1 6 . 4 7 7 426.5999
0 .91B42.6592
50.9573Q . - 1 7 9 6
-0 .47972. ¿592
-41. £,515-18.1909
18.5&34-5 .4085
-11.0941- 4 g . 5 9 f c l- 5 0 . 0 2 8 2
43.2135-15.4942
0 . 9 2 & 1-f l .656744 .3041
-16.05281S.&601
-15.49421 .0014
17.1816-29.55£>B
1 . 0 4 9 539.628420 .34?9
-15.4171- 0 . 0 9 6 5
-30.03631.0598
-7 .096532 .89065 0 - 0 7 2 2-9. 1788
-35.62661.099B
-55.0454U. 93 10 .
t u )0 . 0 9
86.34O . Ü D0.010.123.112 . 9 4
O."l711 .36
0.170 . 0 71.064 • 2 t0 .83l . C - 62 .30 .8 .273.£70 . 2 U
' 0 .080.75
1 01 . 3 30 . 3 0O . G 13.230 . 7 02 .43
0 . 0 10.120.010.120 . 4 90 .05
1065.37O .1.20 . 0 21.670.180,120.870.120 . 0 2G . O B0.11
TABLA DE FLUJOS DE POTENCIA CALCULADOS APARTIR DE LOS VALORES OBTENIDOS AL APLI-CAR LA TEORÍA DE ESTIMACIÓN DE ESTADO.
RC°ORTE DEL CALCULO DE FLUJOS DE -POTENCIA PARA EL SISTEMA EN ESTUDIO
R E VOLTS Á N G U L O M U M V A R KV K V A R U,VA<? S A R R A(P .U) ( G R A O )
4
6
3
&
25
1bEJ
34
1
•'
f|
NOMBRE
S O U T HLAKF.
Í.LMLAf.E
M A I NULM
N O R T HULXLA'<r
t L'''.JUTM
N fi R 7 H*• A ; -,
' nul-i
MU
4 4 . ^ 0
51.00
-15.42-39.£>3
17. 1H3?. II 9
-11 .650 . 4 6
-P . !t t,
-'/u . fa-0."P
-tii..,üV . ti .'ti, l'S
HV/.R T A p
2'J.ib
2 6 . 6 0
•?.bb
-16. CS
-2.10lA . f c f t
-9. lü
7.2tí 1 . C 2 5
- 3 . E- *->
-U . J"-7.10
- 1 '..'»"
J '• . t í 1 .100j . '1 '

113
CASO 3. DETERMINACIÓN DEL MÁXIMO NUMERO DE DATOS ERRÓNEOS CUANDO SE
TIENE UN CONJUNTO SOBREDETERMINADO DE MEDICIONES DEL SISTE_
MA
Para realizar el estudio de esta prueba se considerarán los datos -
de la estimación correspondiente a 45 mediciones del caso anterior
y a partir de estos a 16 mediciones buenas se las hará erróneas corn
pletando un conjunto de 20 mediciones malas. Luego en el proceso
se irá cambiando en cada nueva estimación a una medición mala por
su valor correcto.
En la siguiente tabla se tabulan los resultados de esta prueba.
Como se puede ver, al llegar a la estimación señalada con-un aste-
risco los resultados se acercan a la solución ideal. Puede decirse
que a partir de este momento el estimador está en capacidad de de-
tectar y eliminar datos incorrectos del conjunto total de medicio-
nes, a pesar de que todavía hay un .valor errónero que no ha sido . -
desnechado. Sin embargo si se siguen suprimiendo estos datos ern5_
neos se llega a un punto en el cual el algoritmo de estimación ya
toma el control por completo, esto puede verse en la ultima estim^
ción.
De acuerdo a la prueba descrita, se puede enunciar que los "mejores
estimados" se pueden lograr cuando dentro de los datos totales exis_
te un porcentaje máximo de valores erróneos que oscila entre el 25
y 30%, esto varia de acuerdo a la calidad de las mediciones y al

# DE
TOTAL
MEDI
C. 45 45 45 45
. 45 45 45 45 45 45 45
MEDI
CION
ES •
ERRO
N.
4 20 19 18 17 16 15 14.
13 12 11
•DESH.
4 23 19 18
. i
18 17 16 15 12 11 11
VARI
ABLE
S DE
ESTADO
.
.V>
1.050
1.046
1.049
1.049
1.051
1.051
1.052
1.052
1.050
1.050
1.050
61 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
V*
1.001
1.003
0.983
0.985
0.991
0.991
0.991
0.991
1.001
1.001
1.001
6z
-12.8
-11.8
-12.9
-12.8
-12.8
-12.8
-12.8
-12.8
-12.8
-12.8
-12.8
V3
1.100
1.099
1.087
1.087
1.098
1.098
1.098
1.098
1.099
1.099
1.100
63
-3.40
-3.40
-3.30
-3.30
-3.40
-3.40
-3.40
-3.40
-3.40
-3.40
-3.40
v,.0.919
0.923
0.922
0.922
.0.921
0.921
0.920
0,920
0.919
0.919
0.919
6 «.
-12.3
-10.6
-12.4
-12.3
-12.2
-12.3
-12.2
-12.2
-12.3
-12.3
-12.3
V5
0.919
0.921
Q.930
Ó. 930
0.920
0.920
0.920
0.920
0.918
0.918
0.920
$5
r!2.4
-13.0
-13.3
-13.3
-12.4
-12.4
-12.4
-12.4
.-12.5
-12.4
-12.4
V6
0.930
0,932
0.927
0.928
0.932
0.932
0.932
0.932
0.935
0.935
0.930
¿6
-9.80
-8.90
-9.80
-9.80
-9.80
-9.80
-9.80
-9.80
-9.90
-9.90
-9.80

115
conjunto de muestras seleccionadas, para aplicar la teoría de Estima_
ción de Estado.
Los resultados del programa digital para algunas de las estimacio-
nes realizadas se muestran a continuación.

s f o u w n
T r íl R 1 A • D F
n T
116
nrrsiA P A R T F S I M U L A R E M O S FL F U N C J O N A « , I E ' / T O DE LAT E O R Í A DE E S T I M A C I Ó N • E 'i. UN CE-7TRO. 1)1 CONTROL- , LARÍSXt. nuh C O M S I S T T EN P R U C F S A R U',1 CONJUNTO DE ME-DICIONES' 1EDUNI1AIJTCS ( T O B A D A S EM TIEMPO REAL. ) OCLS J S 7 E H A , E L I M I N A N D O L A S M f O I C I O H E S CRH.ONEflS H A S T AOBTENER EL MEJOR E S T I M A D O DE L A S V A R I A B L E S DE ES-TADO DEL S.E.P.
D E V A L O R E S MEDIDOS DEL S I S T E M A P A R A E V A L U A R
HED.IC.12i
45.6
' 7B9
1011121311151617IB192021
. 2223212526272H2930313233313536373fl3?'104112431115
EL ESTADO OEL MISMO MEDIANTE EL USO DE LA TEORÍA DE
ESTIMACIÓN DE ESTADO.
TIPO DE MEDIC.POTEf.'CIA ACTIVA EN LA B A R R APOTE;,'. REACTIVA EN LA BARRAPOTENCIA ACTIVA E.%' LA' BARRiFLUJO DE POTENCIA ACTIVA EN
FLUJO DE POTENCIA ACTIVA ENFLUJO DE POTE»!. REACTIVA ENFLUJO DC POTEN. REACTIVA EN
FLUJO DE POTEN. REACTIVA EMFLUJO-DE POTENCIA' ACTIVA ENPOTENCIA ACTIVA EN Lí BA R R ATLUJO DE POTENCIA ACTIVA 'ENFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA. ENPOTEN. REACTIVA EN. LA BARRAPOTEN. REACTIVA EN LA B A R R ADQTFW. REACTIVA EN LA BARRA'FLUJO "DE POTEN.' REACTIVA EN
.POTENCIA A C T I V A EN LA B A R R APOT-FN. REACTIVA EN LA B A R R A 'FLUJO DE POTEN. REACTIVA EN'FLUJO DE POTEN. REACTIVA ENFLUJO DC POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA EMFLUJO DE POTEN. REACTIVA ENFLUJO DE POTCN. REACTIVA EN
FLUJO DE POTENCIA ACTIVA ENFLUJO PC POTENCIA ACTIVA EN
FLUJO 0£ POTENCIA ACTIVA ENFLUJO DE POTEN. R E A C T I V A ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO DF POTEN.' RE A C T I V A -ENPDTEMCU ACTIVA E:J LA B A R R A
FLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENPOTENCIA A C T I V A EN LA B A R R AFLUJO DE POTEN. RE A C T I V A ENFLUJO DE POTENCIA ACTIVA EN
1C,f,3.e
16•1n211521534.f.14
1
66112z,62351612315'353?12
'-' 2
- 6- 2'- 6 '
- 3- 6
- 1- 3- 1 '
- 3
- 1— 1
6- 1- 6
51
- 2- 3
- 24
- 3- 2
5
- 1- 5
- 1- 6
.VALOR (P.U.l0.95220.1000D.OOOO
-0.17180.9193
-0.6000. • 0.0795
G.07000.9200
-0.13000.50910.0100
-1.005-00.0255
-0.1200-0.0800-0.1900-0.0500G.1102
-1.0500-0.29990.2351
-0.15880.2046
-0.0863-0.1131-3. 1555-0.1853-0.15883.80100.1718
-0.29521.05000.39580.2025-0.15410.00010.17160.30001 . 1 00 D-0.06980 . 3 2 B 30.5001
-0.0910-0.3958
S T A N D A R D0.800 .900 . 6 00.600 . 9 01.001.001.001.000.80 •0 .401.001.001 .000.50 -í .00 '1.000.65l . O D1 .001 .001 . D O
.00i O O.00.00.00.00.00,00.00, D G,00,00,00.00,00.00.00.00,00.00,00.00
LA FUNCIÓN DE ERROR FN LA E S T I M A C I Ó N fl ES 155979 .000
—LA MEDICIÓN a 20 HA SIDO D E S M E C H A D A POR NO P A S A R LA PRUEBA C H I - C U A D R A D ODE D E T L C C 1 0 N E IDENT IF ICACIÓN DE M E D I C I O N E S ERRÓNEAS.
- CORRESPONDE A: V O L T A J E E\ LA B A R R A 1 Y SU V A L O R ES =-0.1050E 01
LA FUNCIÓN DE ERROR EN LA E S T I M A C I Ó N 75553.672
—LA fTDIC lON " 11 HA SIDO n E S H T C H A D A PPP NO P A S A R L¿ P R U E B A C H 1 - C U A Q R A D OOL D E T E C C I Ó N F _ 1DUJT IF I C AC ] ON DE MF.D ] C I Of.T S E R R Ó N E A S .
- CORRESPONDE A: FLUJO DE P O T E N C I A A C T l V A E N LA L INEA 1- 6 Y SU V A L O R ES = 0 .50T1E D C
LA F U ' J C I O N PF E R R O R EN L¿ E S T I M A C I Ó N » 3 f.
— LA "!
6 1 1 6 6 . 2 4 2
3 HA SIDO nPSHECHADA POt* NO P A S A R L¿ PRUEBA CHI-CU ADR AOOac I O N nr « t : ) i c i r n a c C P H Q W ? A S .
LA f « A « K A 1 Y SU V A L Í * í"> = D. t ' c .??E tí O
LA ruHc ioM DE; ER 'KOR EN LA E S T I M A C I Ó N » 'i ES 3 0 2 5 4 , b a a
—LA PEDICIÓN s 13 HA SIDO DESHECHADA POP NO PASAR LA PRUEBA CHI-CUADRAOOPE DETLCCION E IDENTIFICACIÓN Pf MEDICIONES ERRÓNEAS.
* - CORRESPONDE A: FLUJO DE POTENCIA ACTIVAEN LA LINEA 5- -4 Y SU VALOR ES =-D.1005E 01
LA FUNCIÓN DE EPROR f[J LA ESTIMACIÓN o 5 ES ' 19633.195
—LA MEDICIÓN ü 15 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUADRADOHE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRONCAS.
- CORRESPONDE A; FLUJO DE POTENCIA ACT1VAEN LA LINEA t- 1 Y SU VALOR ES =-0.t20QE 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 6 ES 13002.512
— LA REDICIÓN tt 6 Ha SIDO [JESHECHADA pQR NO PASAR LA PRUEBA CHI-CUADRADOHE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE AI FLUJO DE POTENCTA ACTIVAEN LA LINEA 1- 6 Y SU VALOR ES =-Ü.6000E DO
.LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN * 7 ES . 9481.490
—LA MEDICIÓN S 4 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: FLUJO DE POTENCIA AC T I V A E N LA LINEA 3- 2 Y SU VALOR ES =-0.1715E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 8 ES 7060.69*
—LA MEDICIÓN a 26 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE -A: FLUJO DE POTENCIA ACTIVAEN LA LINEA 1- 4 Y SU VALOR ES =-Q.4431E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN * 9 ES 5313.<t!3
—LA MEDICIÓN X 10 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUAORADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- .CORRESPONDE A: FLUJO DE -POTENCIA REACTIVA EN LA LINEA 2- 3 Y SU VALOR ES =-Q.1300E 01
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN 9 10 ES 3614.759
—LA MEDICIÓN í ' 3 HA SIDO DFSHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADO[)E DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A: POTENCIA ACTIVA EN LA B A R R A 6 Y SU VALOK ES = O.OOOOE 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN 8 11 ES 2922,123
—LA MEDICIÓN a t HA SIDO DESHECHADA POR NO PASAR LA PRUESA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: POTENCIA ACTIVA EN LA B A R R A 5 Y SU VALOR ES = 0.3000E OC
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 12 ES 2238.101
— LA MEDICIÓN Jt 30 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
* CORRESPONDE A: VOLTAJE EN LA P A R R A 2 Y SU V¿LOR ES = O.eOlOE 00
LA FUNCIÓN DE CPROR -EN LA E S T I M A C I Ó N o 13 CS ' H72.3R9
—LA M E D I C I Ó N a 2U HA SIDO DESHECHAOA POP NO PASAR LA PRUEBA THI-CUADRADODC DCTfCClOV E 1DENTKICACIQN OT MEDICIONES ERRÓNEAS.
A: ruiun Dr c in rNc iA Rf A C T I V A EN LA L I N E A j- 5 Y su V A L O R ES '= -o . iR5 .w DO
118LA FUNCIÓN DC EHROR EN LA ESTIMACIÓN B 1A E S . 1GH5.513
—LA MfniCIOU 3 17 HA SIDO OESHECHADA POR NO PASAR LA PRUEBA CHI-CUAORAOODE DETLCCION E J DEtiTJ F IC ACION DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A: POTENCIA R E A C T I V A EN LA B A R R A 3 Y SU VALOR ES =-0.190UE 00
LA FUNCIÓN DE ERROR ETN LA ESTIMACIÓN « 15 ES . 927.<t32
—LA MEDICIÓN B i? HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN C IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A: FLUJO DE POTENCIA REACTIVA EN LA LINEA 5 - 3 Y SU VALOR ES = 0.1102E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ft 16 ES 717.531
—LA MEDICIÓN, a i& HA SIDO DESHECHADA POR NO P A S A R L A . P R U E B A C H I - C U A O R A D ODE DETECCIÓN E' I DEr,TIFI CACI ON DE MEDICIONES ERRÓNEAS.
CORRESPONDE *: POTENCIA REACTIVA EN LA B A R R A 5 Y SU VALOR ES =-0.8QODE-01
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN » 17 ES 464.047
—LA MEDICIÓN * 24 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A: FLUJO DE POTENCIA. REACTIVA EN LA LINEA 6 - <S Y SU VALOR ES = 0.2046E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ft IR ES 302.213
— LA MED1CI.ON * 7 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A: FLUJO DE POTENCIA REACTIVA EN LA LINEA 6- 2 Y SU VALOR ES = 0.7950E-01
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN * 19 ES 220*674-
— LA MEDICIÓN U 12 HA SIDO DESHECHAOA POR NO PASAR'-LA PRUEBA CHI-CUAORADODE DETECCIÓN E IDENTIFICACIÓN DE SEDICIONES ERRÓNEAS.
CORRESPONDE A: POTENCIA ACTIVA E» LA BARRA 1 Y SU VALOR ES = Q.1000E-01
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN U 20 ES 189.793
—LA MEDICIÓN * B HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN OE MEDICIONES ERRÓNEAS.
* CORRESPONDE A: FLUJO DE' POTENCIA REACTIVA EN LA LINEA 1- 6 Y SU VALOR ES = 0.7000E-01
LA FUNCIÓN DE ERROR -EN LA ESTIMACIÓN * 21 ES . 129.911
—LA MEDICIÓN a 22 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: POTENCIA REACTIVA EN LA B A R R A 1 Y SU VALOR ES = 0.235tE 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 22 ES 83.H59
—LA M E D I C I Ó N « u HA SIDO OF.SHECHADA pon NO P A S A R LA PRUEBA C H I - C U A D R A D ODE. DEICCC10N E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: FLUJO DE POTENCIA R E A C T I V A EN LA LINEA 4- 5 Y SU VALOK FS = 0.171BE OL

LA FUNCIÓN OE E R R O R EN LA E S T I M A C I Ó N fl 23 ES 49 .513
- -LA M E D I C I Ó N v 2 HA S IDO D E S M E C H A D A POR NO P A S A R LA PRUEBA CH I -C U'ARR ADODE D E T E C C I Ó N E IDENTIFICACIÓN DE ".EDICIONES f R R O N F A S . 119
C O R R E S P O N D E A: P O T E N C I A R E A C T I V A EN LA B A R R A fe Y SU VAlr'OR ES = 0 . 1 G O O E 0 0
LA FUNCIÓN DE ERROR EN LA E S T I M A C I Ó N fl 21 ES 18.255
M E J O R E S E S T I M A D O S
R A C I Ó N NUMJM. 4
' SOLO
MED. V12
3. .456
. 7fl9
10111213141516171819202122
B A R R A 1B A R R A 2B A R R A 3B A R R A 4
' B A R R A 5B A R R A 6
T A 3 L A DE
LAS MEDICIONES DE
MED.1134555454
443143323313
TIPO NODO.3621
' - 5316
1 43
. 423256543244
EEEEEE
C O M P A R A C I Ó N
V O L T A J E (5)
P NODO 0
134
1
• 2- 1
6 '
53423
26
' 6
= 1.046 . DELTA= 1 .003 . DELTA= 1.099 • DELTA= 0.923 DELTA= 0.921 DELTA= 0.932 D E L T A
DE D A T O S Y CALCULO
= 0.0=-11.8= -3 .4=-10.6=-13.0= -8.9
DEL E R R O R
ESTÁN EN (P.U) LAS R E S T A N T E S EN V A L O R E S
V A L O R MEDIDO50 .0100
-15.8800-15.4100 :
2 0 . 2 5 0 00.91931.1 0001.0500
-15.88000.92000.0100
-5.1000-15.55RO
3 2 . 8 3 0 02 . 5 5 G O
. -6.98003 5 . 5 8 0 0
-29.5200- 5 . 0 0 0 017.1800
-35 .5800* -29.9900
-9.8300
V A L O R C A L C U L A D O49 .7407
-16.1234-14.154318.9171
0 .92051.09861.0464
-16.12340.92290.3681
-10.1237-15.6063
34.12471.7546
-7.555439.7639
-30.66B6-5.261115.6160
-39.7641* -30.9119
-6.4241
R E A L E S
E R R O R ( X í0.54
1.53
8.156.5f i0.130.13
0 .351.53
. 0.31
3581.3511.25
D . 3 6
3 .94
31.198 . 2 4
0 ."1 63.89
5 .22
5.10
0 . 4 7
3 . 0 8
27.25
T A B L A DE FLUJOS DE POTENCJA C A L C U L A D O S AP A R T I R DE LOS V A L O R E S OBTENIDOS AL APLI -CAR LA T E O R Í A DE E S T I M A C I Ó N DE ESTADO.
REPORTE DEL CALCULO DE FLUJOS DE POTENCIA P A R A EL SISTEMA EN ESTUDIO
.
RE VOLTS ÁNGULO MU M V A R MU KVAR M V A R BARRA<P.U>' (GRAO)
1' 6
3&
25
156
34
121
NOMBRE
SOUTHLAKE
ELHLAKE
MAINULM
NORTHULMLAKE
FLMSOUTH
NORTHM A I N
SOUTH
MU
38.7146.17
-11.15-39.76
15.6234 .12
-36.6512.16-6.42
-30.67-12.1 6
-14.1 á39. 7 C,6.47
MV A R TAp
18.9225.53
1.75-15.61
0.3717.74
-10.128.28 1.025
-0.43
.- .69-7.56
-16.1218.02 1.1000.63
T U T A L 1 4 4 .09 135.00 5 & . 0 0
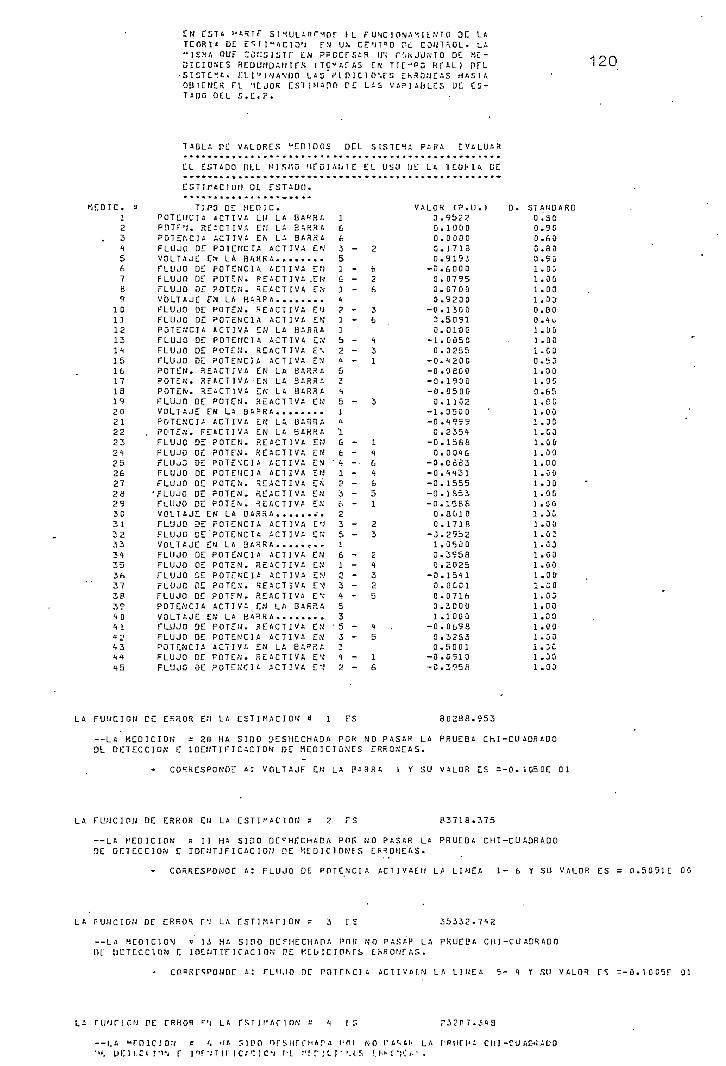
EN EST. M A 1 T F S]^UL-f¡" ' lor 1L FUNC 1 O N A « H'MTO OE L¿T E O R I * DE É ^ T J " / ,C ia ' J FN UX CE'iT>0 p-ú C O N T R O L . LA" T E M A nú? c c r j s i s T r LH P R O C E S A R tn r-^jurvío DC «c-üicio.-crs R E D U N D A N T E S t T O P A B A S E N T I C - P S H F A L Í PTL
• S I S T E M A , E L I M N A M B O L A S ' f t O ! C 1 0\ S C K S O N E A S H A S T AOBTENER FL '1CJOK E S T I M A D O CE LAS, V iP]¿[JLES UE ES-T A D O OEL S . E » P .
120
T A B L A D E V A L O R E S "E tHOOS D E L S I S T E M A P A R A E V A L U A R
KCDIC.
23156789
10131213lf15-1617181920212223212526272829303132333*1
. 333b3738
«2
CL ESTADO PIL HlsnO 'IFDI
ESTir tCION OE E S T A D O .
TJP3 DE MEOIC.POTENCIA A C T I V A L I 3 L A B A K R APQTFri . R E A C T I V A E:.' L¿ B A R R APQTEf .C IA A C T I V A EK LA B A R R AFLUJO DE POTENCIA A C T I V A EN
FLUJO DE POTENCIA A C T I V A ENFLUJO Df POTEN. R E A C T I V A .ENFLUJO OE POTEN. R E A C T I V A ENV O L T A J E F-íl LA H¿RP A, .......FLUJO OE POTEN. R E A C T I V A E'JFLUJO DE POTENCIA A C T I V A ENPQTEMCIA A C T I V A E N L A B A R R AFLUJO DE POTENCIA A C T I V A EN'FLUJO OE POTEN. R E A C T I V A £ \O DE POTENCIA A C T I V A t\
POTEN. R E A C T I V A EN LA B A R R APOTEN. Rr A C T I V A -EN LA 3 A R R AP07EK'. R E A C T I V A E-N LA B A R R AFLUJO DE POTEN. R E A C T I V A EN1
POTENCIA A C T I V A E.N LA G A R R APOTEK. R E A C T I V A EN 'LA B A H R iFLUJO DE: POTEN. R E A C T I V A ENFLUJO OE POTEN. R E A C T I V A ENFLLloO DE P O T E N C I A A C T I V A ENFLUJO DE P O T E N C I A A C T I V A ENFLUJO DE POTEN. R E A C T I V A E^FLUJO DE POTEN. R E A C T I V A ENFLUJO DE POTEN. R E A C T I V A EN
FLUJO DE POTENCIA A C T I V A E 'JFLUJO C E ' P O T E N C I A A C T I V A ENV O L T A J E E'J LA 2 A R R A . ....,.,FLUJO DE P O T E N C I A A C T I V A ENFLUJO OE POTEN. R E A C T I V A ENFLUJO DE POTENCIA A C T I V A ENFLUJO DE PCTE\'. R E A C T I V A EN'FLUJO DE POTEN. R E A C T I V A E MPOTENCIA A C T I V i EN LA B A R R AV O L T A J E £« LA B A R R AFLUJO DE P O T E W . R E A C T I V A ENFLUJO DE POTENCIA ACTIVA ENP O T E N C I A A C T I V A EN LA B A R R AFLUJO DE POTEN. R E A C T I V A E\FLUJO DE POTENCIA A C T I V A E \
A t j T C
1&
k3 --51 -6 -
1 -ü
7 -1 -1 '5 -2 —íi -5;<!
5 -ja
1'& -fc -
• L. -.
1 -
2 -3 -é> -
3 -5 -1
6 -1 -
2 -T. —
A ~
53
• 5 -3 --t.
1 -
2 -
EL USU
2
&
26
3t
<t
31
3
1
4&4&51
23
24
32
5
4 .
5
16
HE LA T E O M A DE
V A L O R (P .U . )3 . 9 b ? 2D . 1 Ü & 00 . 0 0 0 00.171S0.9193
- c . & a o o0 .0795a. C 7 0 &0 . 9 2 0 0
- C . 1 3 C O3.5091.o.oi tse
-1.005C0 . 0 2 5 5
- 0 . 4 2 0 0- o . o e o o-0.1900-0 .0500
0.1152-1 . 050 0-Q .4955
0 . 2 3 5 4-0.1388
0 . 001&
- Q . C o 8 3-0 .4*31-0.1555-0.1S53-0.15BS
0 .8 di 0
G.171B-3.29b21 .05000.39580.2025
-0.1541O . O C 0 1D .07 l f a3 . 3 0 0 Ü1.1000
- 0 . 0 6 9 80.32S30 . 5 0 0 1
-0.0910-3.3958
STANDARD0 .300.900.600.800.90l.DÚ1.001 .00l.OS0.300 ,*n>1 .001.00i.ca0.531 .00l.Ofl0.651 .DC1.001.30l.CO1.001 .001.001 .001 .301.051 .001 .301.00i.&:1 .03i.coi .00i.ool.CO1.031.001.301.001 .00Í.3C1 .001.00
LA FUNCIÓN CC ERROR E-'I LA ESTIMACIÓN X ES 30288 .953
—LA MEDICIÓN a 20 HA S I D O DESHECHADA POP. NO P A S A R LA PRUEBA C h I - C U A D R A D ODL DETECCIÓN E IDENTIFICACIÓN DE M E D I C I O N E S E R R Ó N E A S .
CORRESPONDE A: V O L T A J F EN LA F A R R A i y SU V A L O R ES =-0.1C-50E 01
LA FUNCIÓN DE ERROR EU LA ESTILACIÓN FS 83718.375
- -LA MEDIC IÓN « 11 HA SIDO D E S M E C H A D A POR NO P A S A R LA PRUEBA C H I - C U A O R A D OOE D E T E C C I Ó N C IDENTIFICACIÓN DE M E D I C J O K f S E R R Ó N E A S .
CORRESPONDE A: FLUJO DE P O T E N C I A A C T I V A E H LA LINEA 1 - 6 Y SU V A L O R ES = 0 .5091E OC-
LA FUNCIÓN DE E R R O R f.' LA E S T I M A C I Ó N r r s Í 5 3 3 2 - 7 4 2
— LA MEDICIÓN « 13 H¿ S 1 íl O D E P H E C H A p A P»B NO PAf,¿P LA PHUEL'A C H I - C U A O R A D Onr D E T E C C I Ó N r. lot inmcAciON PE K E Ü I C I O N F S E K R O N T A S .
A : FLUJO DE P O T F K C I A A C T I V A F . N L A L I K E A 5 - Y su V A L O R rs = -o . ioc5 f oí
r U ' i f l C N PC F.P.HOR T'j
— LA M T D l C Í O r í S '.''L U E 3 L C < I'»*j r lir-il
>lt. S I O O !1F S HF C»f> P A I;nf HQ 1 ' A ^ t F - LAIF ¡ C f C i c N i-t f¡.r ¡ c j - MR F.M-Í • ) > : / • • .
; CH ! -CU ADIADO
LA ruNc ic f> cr EIROR EN L¿ rsT . i f i c ioN • *• r? i b ' . z t ? .7Gs
— L¿ .TnitioN i 2fc K& SHT nrsHCCHin/. r r * NO P A S A K LA PIUEKA C H I ' - C U A O R A D O .!)L D C t C C C I O N " E I 1F NT Jf l C A C I m; fT MED 1 C 1 -i" T^ r P R C N T A F . '.. 1 ¿ 1
- CORRESPONDE ¿: FLUJO DE P01 L h C J A • AC' t l V A E H LA L INCA 1- * Y SU V A L O R ES = -G.MilC 0 0
LA FUNCIÓN D£Z ERROR EN LA ESTIMACIÓN í & FS ( 10279. 36}
— LA MEDICIÓN « 12 HA sino DESMECHADA POR \-o P A S AR LA PRUEQA CHI-CUADRADODC D C T E C C I O M E I D E N T I F I C A C I Ó N DE . MEt) 1 C I O N E S E R R Ó N E A S .
C O R R E S P O N D E ' A : P O T E N C I A A C T I V A EN LA P A R R A 1 r SU V A L O R ES = D . 1 0 0 0 E - 0 1
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 7 ES
— LA Í'.EDICION a 59 HA SIDO DESHECHADA POR NO pAsAp u A PRUEBA CHI -CU.ADR ADOHE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERPOKEAS.
- ' CORRESPONDE A: .POTENCIA A C T I V A EN LA B A R R A 5 Y SU VALOR CS = 0.3000E 00
LA FUNCIÓN DE ERROR EN .LA ESTIMACIÓN H 8 ES 2752.740
— LA M E D I C I Ó N " = m HA SIDO D E S M E C H A D A POR NO P A S * P - L A P R U E O A C H I - C U A D R A D OOL OETFCCICN C IDENTIFICACIÓN DE HEDICIOÍJFS ERRÓNEAS.
COPPESPONDE A: FLUJO DE POTENCIA REACTIVA EN LA LINEA 2-3 Y SU VALOR ES =-0.1300E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN a 9 ES . 1895.051
— LA MEDICIÓN B ?B HA SIDO DESMECHADA POR NO PASAF LA PRUEBA CHI-CUAPHADOOE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE 'A: FLUJO DE POTENCIA REACTIVA EN LA LINEA 3- "i Y SU VALOK fS --0.1353E OC-
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN 9 10 ES 1511.1?!
— LA PEDICIÓN « 17 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUACRADQDE DETECCIÓN E IDENTIFICACIÓN' DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: POTENCI-A REACTIVA EN LA B«RRA 3 Y SU VALOR ES =-0.19ÜtC O
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN & 11 ES 1132. 910'
— LA JtEDICJON « 3D HA SIDO DESMECHADA POF NO PASAR LA PRUEBA CHI-CU ¿DR ADODE DEUCCTON E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: VOLTAJE EN LA & A R R A 2 Y SU V A L O R ES = 0.801DE 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN « 12 ES 663,725
— LA MEDICIÓN a 19 HA STOO DESHECHADA PQK NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE ".EDI CI üf-. ES ERRÓNEAS.
- CORRESPONDF A: FLUJO DE POTENCIA REACTIVA EN LA LINEA 5- 3 Y SU VALOR ES = 0.1102E OC
LA FUNC10W DE ERROR EN LA ESTIMACIÓN 3 13 ES A13.619
— LA MEDICIÓN P . H HA SIDO DESMECHADA POP. NO PASAR LA PRUEDA CHI-CUADRADOHL DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: FLUJO DE POTENCIA R E A C T I V A EN LA LINEA 1 - & Y SU VALOR ES - 0.7000E-01
LA rúcelo'*) or, ERROR EN LA ESTIMACIÓN n i* tí ' 3?2.7p?
— LA MTDICIDN a ?2 HA sino DESMECHADA POK NO PASAR LA PRUEBA CHI-CUADRADO|)f. OTTECCIO^ E IDf N T I F 1 C A C ION HE
C O P R E S K O N D i : A: P O j r N C l A K E A C T I V A EV LA lU.R^A ] Y SU V A L O R ES = 0-Í Í51C 00
LA F l f ' JC lOU PE r R R O R f H LA r S T I M A C l O N « J S í T> rü^.Ttíí,
--L •' TDICI-1^ s 7 n; M'ip ftc T l t f n"f.*>£ rf t t - NO »ft •?.*.«. L A PtíUM'A C'i 1 -CU /..r » AHH'.L U E I L C L l ü N L i n C N T If ] CAC ! 0.\ ME ".L b I C I L>M*Í í K^O'i.. .'. « .
_ rf asrct>m;nf ¿ : r ¡ ¡..IM i,r r r-, r r ' t t a i. - ¿r i i •/ 1. ! j i t. i i \ t f. - ' Y e
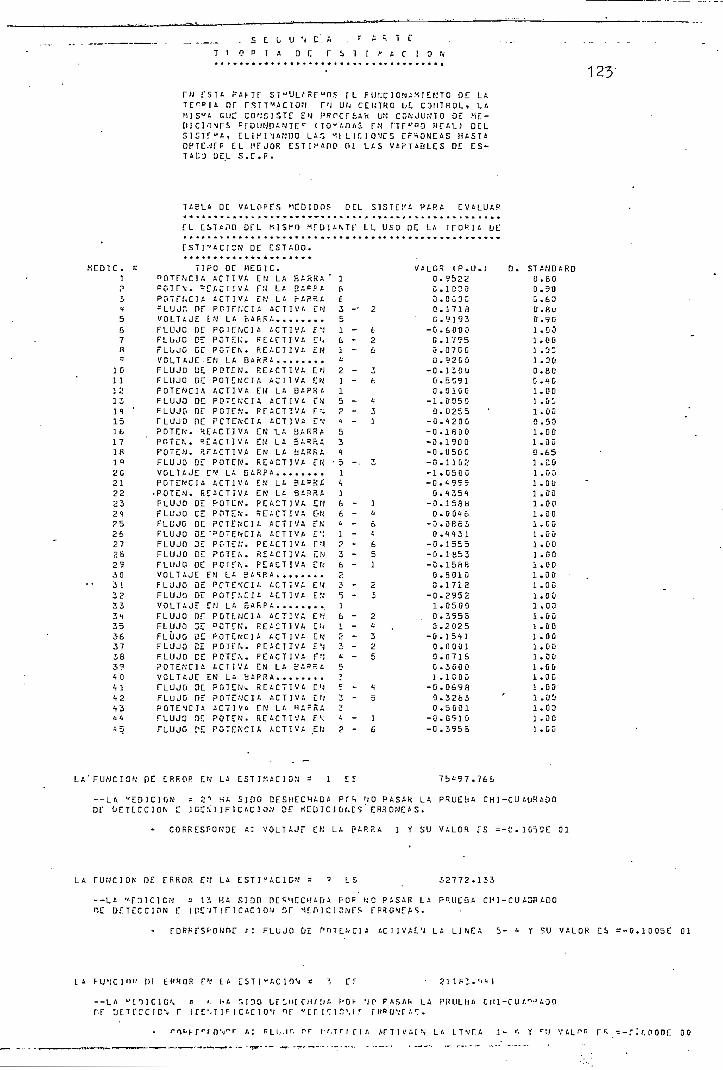
T I
- S
n p
E ü
I A
U 'i C .
D E r i. f » * T C.
) 1 1 f A C ! 0 í»,
F N E S T A P A ^ T T s i "UL /Rr u ns ru F W J C J O N A M I E M T O DE L A" u nr r s T T ^ A C i o r j r'i UN C E N T R O I,L C O N T R O L » LAS^A r.uE C O N S I S T E : EN P R P C T S A K UN CONJUNTO DE HT-
s R E D U N D A N T E ^ (T0"í.n/.s T M nF*°o HEAD Q E LS I G T f ^ A , ELI."1 JAr.'DO LA.3 •<[ L I C I O N E S EF'^ONEAS K A S T f tQfME.-JfF EL í 'FJOR E - S I I ^ A P O 01 LAS V A H I A 3 L E S DE ES-T A C ' J ÜEL S.E.F.
123'
TABLA DE VALORES MEDIDOS DEL SISTEMA P A R A E V A L U A R
EL ESTADO DEL MSPO M E D I A N T E EL USO DH LA TFORlA UE
ESTILACIÓN DE ESTADO.
KED1C . K TIPO DE MED1C.1 noTFfcClfi A C T I V A EN LA B A R R A * 1? »CTF\ REACTIVA fN L¿ EAFPA f,3 POTFÍ.CJA ACTIVA rw L¿ P A R R A e1 cLUJr. P F P C T f N C I A A C T I V A ETM 3 - 25 V O L T A J E Í.N L¿ T .ÜRFA 56 FLUJO DE P O T E N C I A A C T I V A F.'3 1 - t7 FLbJC DE PCTEf;. R E A C T I V A rt, t - 3« FLbJO DE POTEN. R E A C T I V A EN 1 - 6~ V O L T A J E - E N LA BAríRA *
10 FLUJO UE POTEN. R E A C T I V A EN 2 - 311 FLUJO DE POTENCIA ACTIVA EN 1 - fe12 POTENCIA A C T I V A EN LA B A P R A 113 FLUJO DE POTENCIA ACTIVA EN' 5 - 414 ' FLUJO DE POTEN. R E A C T I V A F»; ? - 315 FLUJO DE PCTEfcCIA ACTIVA E \• - 3Ib POTEN. RE A C T I V A EN 'LA B A R R A 517 ' PGTFA. R E A C T I V A EN LA BARF.A 318 POTEN. R r A C T l V A EN LA BA R R A f1<» FLUJO Di POTEN. R E A C T I V A cfj - ó -. 32C VOLTAJE E'J L¿ G A R F A 121 POTENCIA ACTIVA EN L ¿ BA»R£ í,22 -POTEN. R E A C T I V A EN LA BARñA 123 FLUJO DE POTEN. R E A C T I V A EM b - 124 FLUJO CE POTEN. R E A C T I V A E-N 6 - 4?S FLUJO DE POTENCIA ACTIVA EK 4 - Ó25 FLUJO DE "POTENCIA ACTIVA E-: 1 - 427 FLUJO 3E POTE'.'. PEACTTVi EN ? - 6Rü FLUJO DE PCTEf,. R E A C T I V A EN 3 - 525 FLUJO DE PCTFM. R E A C T I V A Ef; b - 130 VOLTAJE FN LA g A R R A ?.31 FLUJO DE PCTE\'CI¿ ACTIVA EN 3 - 232 FLUJO DE POTfNCIA ¿CTIVA F.ÍJ " 5 - 3-33 VOLTAJf- EN LA 5ABPA i34 FLUJO DF POTENCIA ACTIVA E-'J b - 235 FLUJO DE POTEN. R E A C T I V A Ef; 1 - 436 FLUJO DE POTENCIA A C T I V A EN 2 - 337 FLUJO CE POTtl%. R E A C T I V A E'J 2 - 238 FLUJO CE POTE.\ PEACTIVA F-¡ ft - 53? POTENCIA A C T I V A EN LA SA».fit 5
"40 VOLTAJE EN LA BARRA... ?41 FLUJO DE POTEN-. R E A C T I V A E'J S - 442 FLUJO DE POTENCIA A C T I V A E U 3 - 543 POTENCIA A C T I V A EN LA HA?nA Ü*4 . FLUJO SE POTEN. R E A C T I V A F '•, ^ - 145 FLUJO PE POTENCIA ACTIVA EN ? - 6
V¿LOR0.0 .D.0.C .
-&.C.C- .0.-0.0.0.
-1 .G .-0.-0.-0.-0.-0.-1.-C.0.-0.0.-3.0.
-0 .-0.-0.0.0.-0.1.o.0.-0.0.0.
. c.1.-0.0.0.
— u .
-0.
(P.U95221C3D0 C 3 C1713919360001795Ü7GG92GO130U5G91C10G00500255420018001900U 50C1 102G50G4 95 5435415SB00460823443115551B5315ftBB0101712295205003955202515410001071630001COO06983263500105103955
.) S T A N D A R D0 .80 .0 .50C.6D
D . A ÚCI .90l .GO1 .00
1 . D O0.800 . 4 Dl . D O1 .OÍ1 .OS0 .501.001.000.651 .EO1 . ú ú1 .OÜ1 . C r O1 .001.001.001 .001 .001 .001.001.00 •1 .001 .001 .00I .001 .001 .001 .001 .003 .00l . Q C1 .001.031.001.001.00
L A ' F U N C I O f e PE E R R O R EK LA E S T I M A C I Ó N 7 5 4 9 7 . 7 6 6
— LA "EDICIÓN » S'1 HA S I D O D E S M E C H A D A P C k ' JO P A S A R LA PRUEBA C H I - C U A U R A D DDE D E T E C C I Ó N E I D E N T I F I C A C I Ó N DE rtEO IC 1 Of iES ' ERR O N E A S .
• CORRESPONDE A: V O L T A J E EN LA P A R R A 1 Y SU V A L O R TS = -C . lGñ5E 01
LA FUNCIÓN DE E R R O R E« LA E S T I L A C I Ó N 32772.133
- -LA "T3IC1CN * 13 HA S IDO n E S H E C H ¿ D * FOF NO P A S A R LA PRUEBA C H I - C U A O P A D OHE D E I E C C I O N E IPE'JTIF ICACIO. ' J DF H C H ] CI RNFS f R R C M E A S .
t: FLUJO DE P O T E > C ] A ¿ C T J V A E ' J LA L I N E A 5- * Y V A L O R ES = - o . i o o 5 E oí
01 EI'HOR fȒ LA ESI
'» . e '. f -A r.i^o urr-r ü t i r c c i c * * r ¡ E E - . T I F I C A C I O ^ J
cuM»/. F-GI- '¡r FAS.AI - LA PIUILHA CHI-CU/.* I I 'AQO« tMc iss í r t»*u\-r :•*..
Í. L T M T A 3- r. Y *•'.< r1". --rif.ponr DO
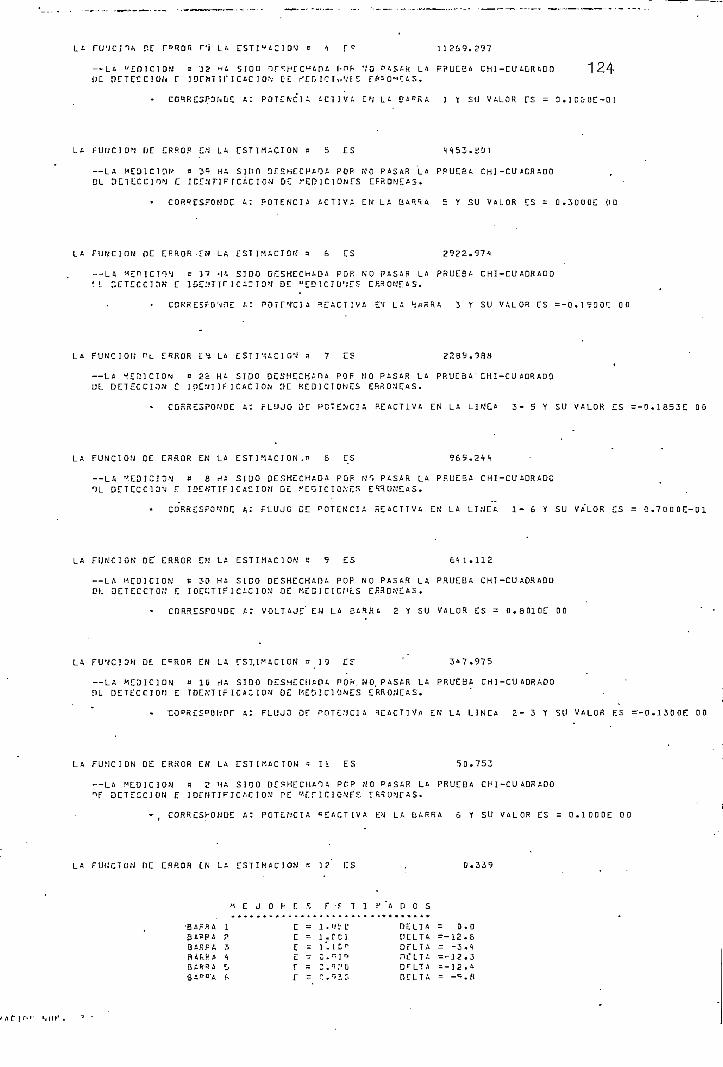
OC f»ROK r-i L'' rSTI^ tClD 'J a 1 r^ 11269. ?
— L A "EDICTO:; * 32 H4 S IDO O T ^ H r C ^ t n A l-nn 'JO P t S t k La PRUEBA C H I - C U A G R A D O 124u t nnccciou r lorwi ir ic*c JON- CE rrniciv.'.-f c rr'=o"r¿s.
• CG1RESF3ND!: A : P O T E N C I A i - C T J V A EN LA p i ^ R A " ] Y SU V A L O R ES = 3 . 1 D S O E - Q 1
LA F U N C I Ó N DE ERROR E-1* LA E S T I M A C I Ó N a 5 ES A 4 5 3 . S Í I 1
—LA M E D I C I Ó N « 3^ HA sino D E S H E C H A O A POP KO P Í S A R LA PPUEBA C H I - C U ¿ C R A D QDL D E T E C C I Ó N E I CE.'fTTF ! CAC I QN DE ."EDICIONES E R R Ó N E A S .
CORRESPONDE A: P O T E N C I A A C T I V A EN LA UAIR A 5 Y SU V A L O R ES = Q . 3 0 C I O E 0 0
LA FUNCIÓN DE E R R O R - C S LA E S T I M A C I Ó N d f, ES ' ' . 2922. S71
- -L4 M E n j C T O ' J = ]7 '\f. S T D O Of~SHEChí.O¿ POR K O P A S A R LA PRUEBA C H I - C U A D R A D O; L r-irrccciru; E i D C r t r i r I C A ^ I O ^ J D E " E D I C J O Ü T S
'-JHE A: POTf'í'CIA T A C T I V A £V LA H « R R A 3 Y SU V A L O R £S = -0 .1?OOr 00
LA FUNCIOIÍ nL ERROR CU LA C ST I '-íAC I 0"í a 7 ES 2259 .388
— LA V E D I C I Ü N s 2é HA SIDO O t T S M E C H A H A P O P NO P A S A R LA PRUEBA ' CHI-CU ADR ADODE. DETECCIÓN E T DEííT J F 1 C AC 1 O.V DE «EDICIONES E R R Ó N E A S .
CORñESPOHOE A: FLUJO DE P O T E N C I A R E A C T I V A EN LA LIWEf l 3- 5 Y SU V A L O R ES =-0.1853E 00
LA FUNCIÓN OE ERROR EN LA E S T I M A C I Ó N . » 8 ES 9 6 5 . 2 ^ ^
— LA T J :ED]C ]DN 9 & H£ SIDO D E S M E C H A D A POP NO P A S A R LA P R U E B A CHI -CUADRADCTL D T T E C C I O V t IDENTIF ICACIÓN DE f -EOIC IQNER ERRÓNEAS.
CORRESrONDE A: FLUJO CE P O T E N C I A R E A C T I V A EN LA LINEA 1 - 6 Y SU V A L O R ES = C . 7 0 0 D E - 0 1
LA FUNCIÓN DE" ERROR EM LA E S T I M A C I Ó N S 9 ES til.112
—LA MEDICIÓN * so HA SIDO DESMECHADA POP NO PASAR LA PRUEBA CHI-CUADRADOUL DETECCIÓN E IDENTIFICACIÓN DE KCDICICMLS E R R Ó N E A S .
CURR.ESPO'JDE A: V O L T A J E EN LA B A R R A 2 Y SU V A L O R ES = O - S O I Ü E DO
LA FU\T,30N DE. E C ROR CM LA tST . IHACTON s 10 ES ' 3"7.975
— LA «EDICIÓN fl 10 HA SIDO DESMECHADA POh. N 0. P A S A R LA PRUEBA CHI -CUADRADOOL D E T E C C I Ó N E IDENTIF ICACIÓN ÜE MEDICIONES E R R Ó N E A S .
A: FLUJO or POTENCIA REACTIVA EN LA LINEA 2- 3 Y su VALOR ES =-o.iaooE
LA FUMCION DE ERROR EH LA E S T I M A C I Ó N » 11 ES 5 0 . 7 5 3
— LA MEDICIÓN a 2 HA SIDO D C ^ H E C H A T A P C P NO P A S A R LA PRUEBA C H I - C U A D R A D Onf D E T E C C I Ó N E IDFHTIFI C A C ION PE "E r iC IONTE r RR
CORRE5HONOE A: P O T E N C I A « E A C T 1 V A EN LA B A R R A Ó Y SU V A L O R CS = D . 1 0 0 D E 00
FUNCIÓN DE E R R O R LIJ LA E S T I M A C I Ó N * 12 ES . 0.3Í9
M E J O t- T. .S F •< T I
• S A F R A 1B A F P A ?
B A R F A 3B A R R A 4B A f c R A £.O A P W ' A f.
c = i . »j ;• cE = l . C C IE = 1 '. 1 l ?L - V • ° 1 **
E = ;.n;.-tjr = r.<í;3
D E L T A = Q . OHCLTt =-12.8O F L T A = -3.tD E L T A = — 1 2 3D r L T A =-12. tD E L T A = -Q.íl
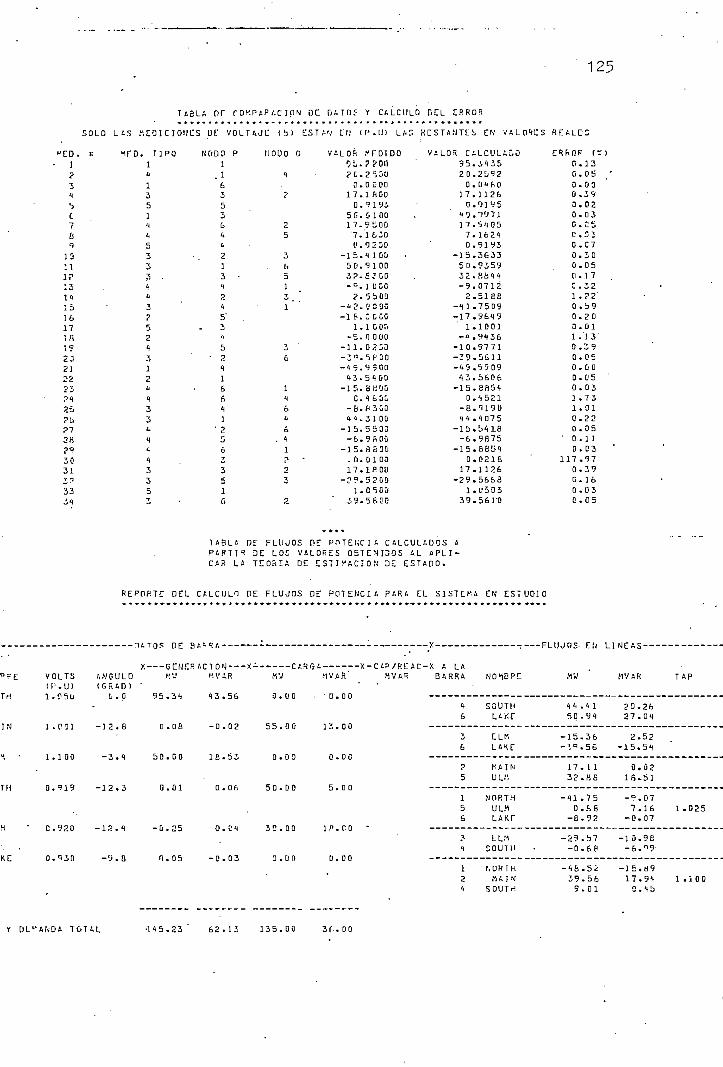
125
11ir".3111 51617
2323
?73H
M f D . T I P O141351
OHL'S UT VOLTAJE (b ) ESTÁN L'ij IP.IJ) LAS RESTANTES EN VAL
NODO P1
. 1635364í.
2. 1
3 •í)24
-5" .3í-5
2416
ÍJODO 0
4
2
25
3651i
1 ' '
36
1
V A L O & H TDI DO9b.??D¡)20. 2 "i 50
0 . 0 0 00 • •17.1 neo
0 . *? 1 93s n . o i o o17. «500
. '7 .1630U. 92 30
-15.410&5 C'. 9 100a?. £7 oo-G.l Ü C O
? . 5 b O O-4 2. C S9G-'IB. 3 CCO
1.1 GÜO-5. í)000
-11. 02:0
- Í ' ^ . ^POO- 4 5 . 4 5 0 0
43. 5 400
- 1 5 . 8 K Q Q
V A L O R CALCULA ' ,095. ¿4352 0 . 2 5 9 2
0. t t 4 f t O17.1126
0.9] V 545.TJ713 7.5'i 05
7.1624. 0.9193
-15.363350 .93593 2 . f. h 4 4-9.0712
2.5188-41.7509-17.9649
1.1001-" .^436
-10.9771-39.5611-45 .5509
4 3 . 5 6 0 6-15.8fi54
- fc .PJÚD
4 4 . 3 1 0 0-15.5503
- 6 . 9 B O O- I S . f l c O O
. 0 . 0 1 0 017.1f iDO
-29 .5200l . C S O C f
3 9 . 5 f. 00
0.4521
4 4 . 4 0 7 5-15.b418-6.9875
-15.88540.0218
17.1126-29.5663
1.U5Q339.561'D
0.13G . O 50 . 0 00.390 . 0 20 .03O . C 5C . D 3
D . C 70 .300 . 0 50.17C . 3 21 ,?2 'O.b9
0 . 2 00 . 0 1
1 .'13'O . S 9
O . G 50 . 0 00.050 . 0 31.731.010 . 2 20 . 0 5
• 0.110 . 0 2
117.970.390.16O . U 30.05
T A P . L S DE FLUJOS DE P O T E N C I A C A L C U L A D O S AP A R T I R DE LOS V A L O R E S O E T E M J 3 0 S AL APLI-CAR LA TEO«IA DE E S T I L A C I Ó N DE E S T A D O .
R E P O R T E DEL CALCULO DE FLUJOS DE P O T E N C I A P A R A EL S I S T E M A EN ESTUDIO
.
X G E f J E P A C T Q N X- — C A R G A X - C A P / R E A C - X A LA"FE VOLTS ÁNGULO i^u M V A R «y M V A R ' M V A R B A R R A
( V- . U ) í G R A D ) ' '
• 4b
36
?
5
156
j
4
1
24
NOUBPE
SOUTHLAKf
ELKL A K C
M A í r -ULíl
N'ORTHULMLAKf
LLMSOUTH
f , U H 1 HMAIN
SOUTri
MU ' HVAR TAP
44 .4150.91
-15.36-Íq-56
17. I 132.H6
-41 .750 . 6 6
-B.92
-29. b7-D.6P
- 4 6 . 5¿39.56
5 .01
2 0 . 2 627 .04
2. 52-15.54
O . Ü 2
16-51
-9.077.16 1.025
-0.07
-10.98-6.09-
-1 5.a917.94 1.100
3 . 4 5
T O T A L •145.23 62.13 135.00 3f.. 00

126
CASO 4. OBTENCIÓN DE LOS MEJORES ESTIMADOS UTILIZANDO DIFERENTE GRA_
DO DE REDUNDANCIA Y PORCENTAJE DE ERRORES MODERADOS
Se iniciará la prueba con las 45 mediciones de la estimación reali-
zada en el caso (2) y a partir de este grupo de datos se irán elimi_
nando progresivamenye 5 mediciones cada vez.
Los resultados de esta prueba se muestran en la siguiente tabla.
En esta tabla se puede ver que al ir disminuyendo el número de medj_
ciones (incluyendo las erróneas), la estimación como se mencionó an_
teriormente se mantiene. Esto ocurre si se considera un porcentaje
normal de errores dentro del conjunto total de mediciones. Así mis_
mo se puede notar que en la ultima estimación ya no hay suficientes
datos correctos para estimar el estado, lo que produce una gran
inexactitud en los resultados.
Resultados del programa digital se muestran a continuación.

í?.D
E
MEDÍ
C.
MEDI
CION
ES
ERR,
DESH
.
SOLU
CIÓN
VE
RDAD
ERA
45 40 35 30 25 20 15
8 7 9 7 5 4
' 3
8 7 9 *
7 5 4. 1
VARI
ABLE
S DE E
STAD
O
' v:
1.050
1.050
1.050
1.050
1.051
1.051
1.052
1.024
«i 0. 0. 0. 0. 0. 0. 0. . o.
V2
1.Q01
1.001
1.001
1.001
1.001
1 . 0'02
1.003
1.011
62
-12.8
-12.8
-14.1
-12.8
-12.7
-12.7
-12.7
-13.3
V3
1.100
1.100
1.099
1.099
1.102
1.102
1.103
1.111
<53
-3.4
-3,4
-4.2
-3.3
-3.2
-3.2
-3.2
-4.2
V4
0.919
0.919
0.919
0.919
0.919
0.920
0.920
0.927
6--12.2
-12.3
-12.4
-12.2
-12.3
-12.3
-12.3
-13.0
V5
0.919
0.919
0.920
0,919
0.919
0.920
0.919
0.914
65
-12.3
-12.4
-12.6
-12.3
-12.4
-12.4
-12.4
-17.0
V6 0.93
0,930
0.930
0,930
0.930
0,931
0.932
0.939
<56
-9.8
-9.8
-9.8
-9.8
-9.8
-9.8
-9.8
-10.5
IN3

130
O A P a R T E
T ' f O ' I A -D C S T I v. A C I Ó N
EN ESTA " A R T E S I M U L A R E M O S EL F UNC10!J A M I E N T O DE LAT E O R Í A DE E S T I L A C I Ó N EN UN C E N T * O DE C O N T R O L » LA."1S"A KUf C O N S I S T E EN P R O C E S A R UN COrJJUNTO DE HE-DlCIfl'.'ES R E D U N D A N T E S ( T O M A D A S E A* TIEMPO R E A L ) DELS I S T E M A , E L I M I H A H D O LAS «E O !C I ONE S E R R Ó N E A S H A S T AO-Ttvjrp. EL í 'EJOR E S T I M A D O DE LAS V A R I A B L E S DE ES-
TADO DEL S.E.P.
T¿Í?LA DE VüLORTS HEDIDOS DEL SISTEMA PARA EVALUAR
EL ESTOPO HEL MISMO HEDÍANTE EL USO DE TEORÍA OE
ESTILACIÓN DE ESTADO.
HEOIC. fl TIPO DE1 POTEN'CTS ACTIVA Efj LA P A R R A 12 POTE.'JCü ACTIVA EN LA B A R R A GS FLUJO PE POTCÍJCIA ACTIVA EN 3t VOLTAJE E'J LA B A R R A 55 FLUJO DE POTEN. REACTIVA EN -66 FLUJO DE POTEíJ. R E A C T I V A EN 17 VOLTAJE E^ \_t B A R R A • n8 -FLUJO DE POTEN. REACTIVA EN 45 FLUJO DE POTENCIA ACTIVA EN' -1
10 POTENCIA ACTIVA EN LA BARRA 111 FLUJO CE POTENCIA ACTIVA EN 512 FLUJO DE PGTE.%. REACTIVA EN 215 FLUJO DE POTENCIA ACTIVA EN 414 POTE.":. R E A C T I V A EN LA B A R R A 515 POTEN. REACTIVA EN LA B A R R A 3
VALOR (P.U.) '0.9522O.OOOD0.17180.91930.17950.17000.9200
-0.00090.50910.0100-0.20500.0255
-0.4200-0.18000.1500
D. STANDARDO.ROD.600,800.901.001.001 .00O.BO0.401 .001 .000.750.501 .001 . ú u
LA FUNCIÓN DE ERROR E¡í LA ESTIMACIÓN ES 7018 .903
—LA M E D I C I Ó N ~ 10 HA SIDO OCSHECHüDA POF NO P A S A R LA PRUE5A C H I - C U A D R A D ODE D E T E C C I Ó N E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
CORRESPONDE A: P O T E N C I A A C T I V A EN LA B A R R A 1 Y SU V A L O R ES = 0 . 1 0 D O E - 0 1
LA FUNCIÓN DE ERROR E'J LA E S T I M A C I Ó N * 2 ES
f. E J O R . . E - S . E - S T I M A D O S
B A = ? . A
F A R R A
& £ R R A
e A^'i e5 ¿ R f í A3 ¿RR A
123o
5£;
EE
'EEEE
=
=====
111000
. 0 2 4
.CU
.3 11
.927
.914
.939
DELTADELTADELTAD E L T AD E L T ADELTA
=
= -==-=-= -
013-4131710
.0
.3
.2
.0
.0
.5
í A C I Ó N NUM.

ME
D.
I 2 3 n 5 6 7 P u
10 11 12 13 11 .
.
BA
RR
A N
OH
DR
E V
OL
TS
( P
. U
)i
1
NO
RT
H
Í.
02
4 .
¡ 2
MA
IN
1.0
1J
3 E
LM
1.1
11
i í
1
SO
UT
H
0.9
27
5
UL
M
0.9
11
i
6 L
AK
E
0.9
39
tí
"EO
. T
IPO
U
OO
O
n1
1 '
. 1
&
3 3
5 5
1
61
1
5 1
1
13
' 1
2 3
3 5
1
' 2
3
1•
- 2
5
TA
BL
AP
AR
TIR
CA
R L
A
RE
PO
RT
E D
EL
CA
LC
UL
O
i
. X
GE
NE
RA
CIÓ
NÁ
NG
UL
O
MU
M
VA
R(G
RA
O)
0.0
-9
5.3
3
26
.85
-13
.3
0.1
2
-0.3
1
-1.2
6
0.6
1
19
.17
-13
-0
lfl.
96
1
0.9
9
-17
. 0
-28
.69
0.5
8
-10
.5
. 0
.0
2
9.1
2
Non
o o
2 -
p 6 :
6 6 1 3'
1
DE
F
LU
JO
S
DE
. V
AL
OR
VE
11
DO
•55
.22
CÍÍ
P.
00
00
1,7
-1 B
CQ
-
0 . 9 1
93
17
.95
00
17
.00
00
0.9
20
0 .
-tí.
09
00
50
.91
00
19
. 0
00
0-2
0.5
00
0 ,
2.5
50
0-1
2.0
00
0-I
B.O
Oü
O
VA
LO
R C
AL
CU
LA
DO
. 0
.02
19
17
.1 0
76
0.9
11
11
7.8
98
01
7.Ú
G8
60
.9?
68
.-O
.?1
99
50
.92
18
19
.16
99
' -2
0.3
01
12
.27
11
-4 1
.BÜ
12
-17
.11
98
ER
RO
R ( n
0.1
1
0.0
0
0.4
20
.51
0.2
90
.05
0.7
1111
.3
80
.02
0.8
9
0.9
7
.10
.92
0.2
83
.22
)
.
PO
TE
NC
1 A
CA
LC
UL
AD
OS
AD
E
LO
S
VA
LO
RE
S O
BT
EN
IDO
S
AL
AP
LI-
TE
OR
ÍA
OE
E
ST
IMA
CIÓ
N
OE
E
ST
AD
O..
DE
F
LU
JO
S
OE
y C
AR
GA
MU
.0.0
0
55
.00
0.0
0
50
.00
30
.00
0.0
0
PO
TE
NC I
A P
AR
A E
L
_-.
— -
__
v-
rAp
/RF
Ar—
— —
X
Lfll/K
LA
L
MV
AR
MV
AR
0.0
0
13
.00
0.0
0
5.0
0
18
.00
0.0
0
SIS
TE
MA
E
N
ES
T
X A
LAB
AR
RA
NO
MB
RE
4 S
OU
TH
6 LA
KE:
3 E
LM
6 L
AK
E
2'
MA
IN5
ULM
J N
OR
TH
5
UL
M6
LA
KE
'
3
' E
LM
1
SO
UT
H
1
NO
RT
H2
MA
IN1
S
OU
TH
UD
10
"MU
•14
.10
50
.92
-15
.39
-39
-18
17
.11
43
.53
-41
.88
20
.30
-9.1
6
-38
.38
-20
.30
-18
.72
39
.18
9.5
6
MV
AR
' T
AP
' 13
.4
01
7.0
1
2.2
7-1
5.5
8
0.2
2
16
.95
-2.7
81
2.0
0
1.0
25
-0
.22
-7.2
7-1
0.1
5
-6.8
11
7.9
0
1.1
00
0.6
1 '
GENERACIÓN Y DEMANDA TOTAL
116.69
66.39
135.00
36. 00

132
CASO 5. DETERMINACIÓN DEL MÍNIMO NUMERO DE MEDICIONES PARA ESTIMAR
EL ESTADO DEL SISTEMA, CONSIDERANDO LOS CRITERIOS DADOS DE
OBSERVABILIDAD DE REDES
Para este proposito se irán probando progresivamente los diferentes,
casos, hasta lograr una buena idea de lo que ocurre en la estima-
ción para mínima redundancia.
CASO 5.1. Se empieza el proceso con un número igual de mediciones
al de variables de estado, caso "COMPLETAMENTE DETERMINA
DO". Como se ha demostrado anteriormente este es un caso Metermi-
nfstico y es equivalente al que se utiliza en el estudio de "Flujos
de Potencia Estocástico". En el se puede notar la.imposibilidad de
filtrar errores de medición. El efecto que se produce al aplicar
ía Teoría de Estimación es la"'falta- de redundancia, lo cual provoca
muchas veces la no definición de la matriz inversa ((F ,W.F)~ ) en
el proceso, y consecuentemente es imposible aplicar la ecuación de
estimación de estado.
NOTA: Existe la inversa sin la ecuación de la barra oscilante, y la
solución es idéntica a la que se obtiene en el cálculo del
flujo de potencia.
CASO 5.2. Se incrementará ahora en uno el número de mediciones p£
ra proceder a realizar la estimación.
En este caso, si el conjunto de mediciones es muy homogéneo se pue

133
de estimar, aún asi es imposible filtrar errores ya que se cae -en
el problema del caso Completamente determinado.
A continuación se muestra el resultado de una estimación con 12 me_
diciones.
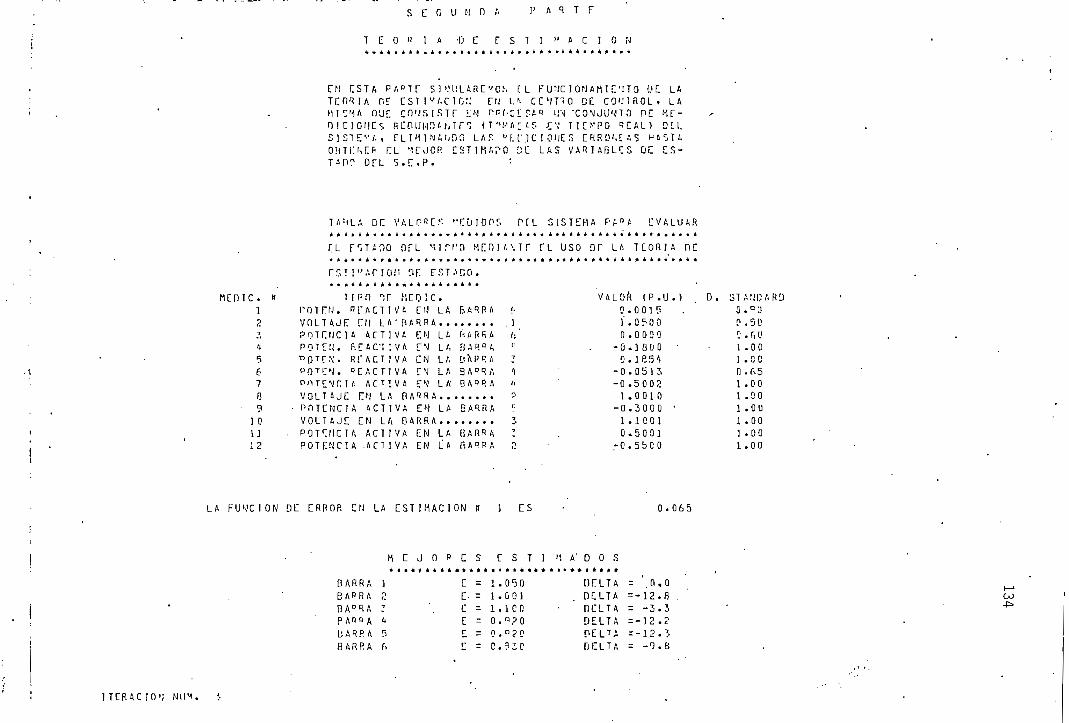
S
E
O
U
M
O
/• P
A
R
T
F
T E
O
» I
A '
-ID
E E
ST
IL
AC
IÓ
N
EN
FT
STA
PA
RT
E S
) *M
iL A
RE
''O.S
C
L FI
TJC
IQ
NA
M 1
E'-
ITO
L>
E LA
TE
OR
ÍA
HE"
ES
I 1
V/.
C1
&::
E
fí l.
v C
EN
TR
O D
E C
O'.
'TR
OL
* LA
n'í
sis
ir
:-;N
rr
-t-c
E^A
R
i¡g
•co
\JiK
'io
P
E
",r-
RE
DU
MÍU
Nlf
! ÍT
'^A
Ct?
£
\ T
IEM
PO
^E
AL
) D
LL
SIS
7E
V/.
, rL
T'I
INA
t/n
o L
AS
nM
CIO
'íE
S
ER
RÓ
NE
AS
Hñ
^TA
OM
TI:
NE
F r.
L M
CJC
P.
ES
TIM
AD
O
üt
LA
S
VA
RIA
BL
ES
DE
cs
-T
AO
? o
rí.
S.E
.P.
• :
DIZ
VA
Lr-
RE
f.
"Eü
IOO
r.
PfL
S
IST
EM
A P
f.°A
C
VA
LU
AR
MC
DIC
. «
7 e ? i o
u 12
TL
riT
íoo
n
fL
Mir
ro
Mr.
nu
ur
FS
T!"
Ari
ail
C
¡r F
ST
AD
O*
T [p
n
nr
ME
OIC
.rO
TF
N.
"TA
CT
IVA
EN
L
A
&A
RR
A f
.
PO
TE
NC
IA
AC
TIV
A rt
,¡
L¿
ri
AR
HA
í: '
PO
TE
N.
F.E
AC
-;:V
A T
N
L/,
B
AR
^A
r•"
()T
r.\'
, R
F A
CT
IVA
CN
LA
DJU
'RA
:fQ
Tr^
. o
fAC
TIV
A
FN
LA
S
A°R
A
AD
riT
r\if
;ií.
A
CT
IVA
r^
LA'
BA
»R
A /i
PO
TE
NC
IA
AC
TIV
A E
M
LA
BA
RR
A K
PO
TE
NC
IA
AC
1IV
A E
N
LA
BA
RR
A 1
PO
TE
NC
IA
.AC
TIV
A E
N
LA
RA
RB
A ?.
FL
US
O
DF
Lft
TE
OR
I A
RE
VA
LO
R (P
.U.)
0.0
01
?.
1 .
Q •=>
0 0
0.0
02
0-0
.3B
OO
'
-O.O
Í51
J-0
.50
02
1 .
0 0
1 0
-0.3
GO
O '
1 .
1 C
C 1
0.5
00
1rC
.Sb
CO
.50
.fiü
.00
.CC
.f-5
.00
.00
.00
.00
.00
1.0
0
LA
FUNCIÓN OE ERROR
L'N
LA
ESTIMACIÓN
U 1
CS
0.065
E S
T 1
M A' D O
S
BARRA 1
BARRA
í!BA°RA 7
p A R » A
<*UARFA
íiBARRA ft
C = 1.050
n. = I.
QOI
E = 1.1CO
E = O.r'?0
r =
0 . n ?C
E = C.93C
HTLTA = '.0.0
DELTA =-12.8
DELTA = -3.3
D£LTA =-12.2
PCLTA =-12.?.
DELTA = -«3.B
ITERACIÓN
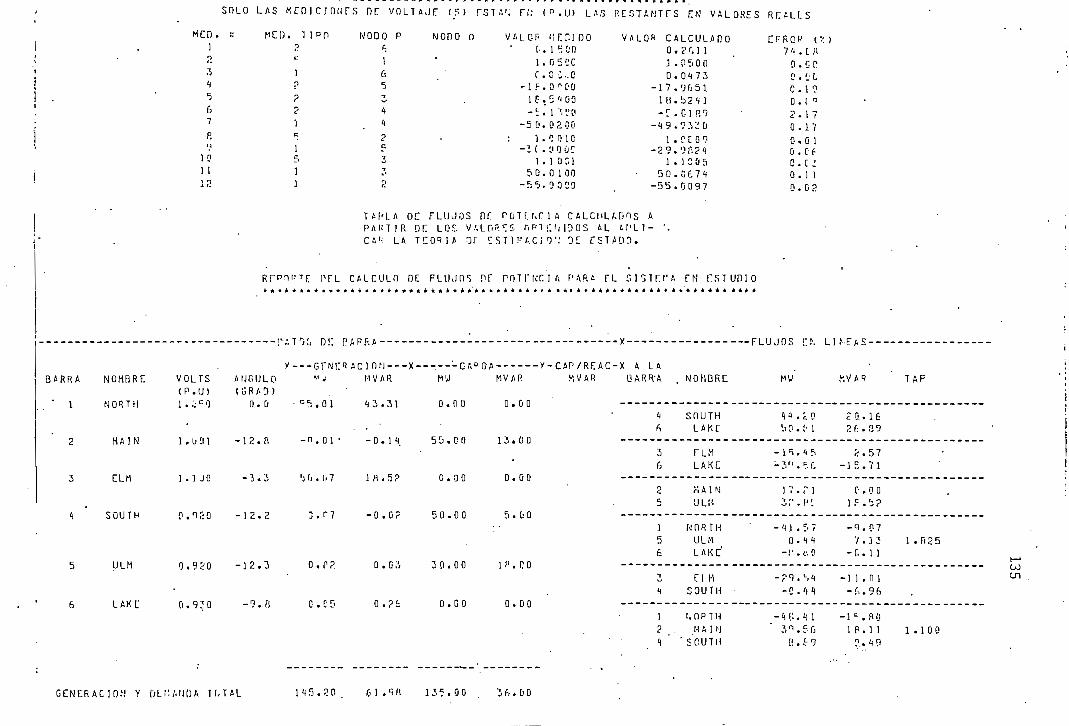
SO
LO
LA
S K
CO
ICIO
rJF
S D
F V
OL
TA
JE
fST
A';
F
f;
(P.l
.1)
LA
S R
ES
TA
NT
CS
EN
V
AL
OR
ES
RE
AL
LS
ME
O.
K M
CD
. T
IPO
N
OD
O
P M
OD
O
0 V
/.L
OF
'tm
iDO
V
AL
O«
CA
LC
UL
AD
O1
2 ^
Í-.3
SÜ
Q 0
.?U
12
u
1 "
l.O
SC
C
3 ,í
!50
0;
3
1 f;
• .
C.C
;,C
0
.04
73
4 ?
5 *•
! F
.O^f
rO
-17
,96
51
5 ?
3 .
3 £
.54
00
3 Íi
.b2
41
' f>
2
4
-í.l
V.'ti
-:
.G1
ÍÍ9
; 7
1
' .
4
-50
. 0
20
0 -4
9.9
3^
0&
* ?
• :
i . i
n i
o
' i . r
c o
9*?
1 ?
-3 f
. !_
' 0 O
í -2
9.9
1";
? 4
J -
5
3
1 .
1 0
C 1
3
.10
05
H
3 3
50
. 0
1 00
•
50
.06
74
12
1
2
-55
. 0
0 09
-5
5.0
09
7
ÍAH
.A
DC
FL
UJ
OS
O
f n
üU
MT
IA
CA
LC
UL
AD
OS
AP
AH
T1
R D
E L
OS
VA
LO
RE
S n
mr
1,0
05
A
L tl
'Ll-
'.
CA
'<
LA
TE
OR
ÍA
Of
SS
Tlt
ft.C
iQ1.1
D
E fS
TA
OH
.
RfP
ni^
f:
pfL
C
AL
CU
LO
D
E
FL
UJO
S
PF
P
OT
fK'C
U
PA
RA
fL
GlS
TF
f'A
FN
E
ST
UD
I
y G
FN
ER
AC
lOfJ
X
.---
CA
Dft
A
X-C
AP
/RE
AC
-X
A LA
BA
RR
A N
OM
BR
E V
OL
TS
ÁN
GU
LO
M
* M
VA
R MW
M
VA
R M
VA
R B
AR
H'A
.N
OM
BR
E(
P .
u )
( u R
/• 0
)
. '
1 N
OR
TH
1
. .; C
0
0.0
•
• 9
5 •
0 1
43
.31
O
.OU
0..
00
' 4
S
OU
TH
. .
' •
. 6
LA
KF
2 M
AIN
3 . ü í!
1
-12
. H
-n.Q
l'
-0.1
4.
50
.00
13.
ÜO
—3
• F
LM6
LA
KC
3 E
LM
1.1
JO
-3
.3
l¿fj .
Ii7
1
8.
5?
C.Q
O 0
.00
2 M
AIN
5 U
L!4
4 S
OU
TH
P
tiT
íO
-1
2.2
3
.C7
-0
.0
?
50
.00
5.0
0
~ —
; •
. •
. 3
k'O
RT
H:
. 5
U
LM
fc
LAKE
'5
UL
M
0.9
20
-12
»3
O
.PP
O.G
3 3
0.0
0 lí
'.O
O
_3
n H
4 S
OU
TH
•6
LA
KC
0.9
?0
-9.B
G
.íC
» 0
.?£
; 0
.00
0.0
01
í.O
PT
H? .
. .M
A I
N'
' '
4 :
' S
OU
TH
CF
RQ
Fí
(V
)
74
.1/1
0 .
G 0
C .
'_• 1
C . 1 9
0.1
°
2.1
7
0.1
7
0.0
10
. C
f .
C.
C ¿
0.1
1
0.
02
0
MU
KV
AS
T A
P
45
.¿n
e
Q.1
6b
0 . M
2
f: .
íí 9
-7.f'.!:
.r,
-1E
.71
1 7 ,
r i
c . o
o3;i.
í".
if.b
?
-'U
.5
7
-q,0
70
.44
7.3
3 1
.02
5-r
.t.0
-f
. .1
1
-PT
.S4
-i u
ní
-C.4
4 -f
t.9
6
- 4
í'- .
4 1
- 1
t .
R í!
' 3
n.5
fj
1 P
. 1 1
3
.30
0
Cu
en
GE
NE
RA
CIÓ
N Y
OLÍ
'-A
NU
A K
-TA
L1
45
.20
61
."íf
t 1
3^
.00
. 3
6.0
0

136
CASO 5.3. Ahora se realizará la estimación del estado del sistema
con 13 mediciones ideales. En este caso es muy importan^
te observar los criterios ya definidos, puesto que es imposible es_
timar si no hay consistencia en los datos.
En esta prueba se puede notar que todavía es imposible filtrar errp_
res as! como también se puede, decir-que si no se cumple con algún
criterio de Observabilidad, no se puede lograr ningún tipo de estj_
mación. En el resultado del programa digital que se muestra a con_
tinuación se puede observar que aun cuando no existe, ningún dato
erróneo, se ha deshechado a la medición P2,6- Esto indica que el
estimador en este punto es muy sensible.
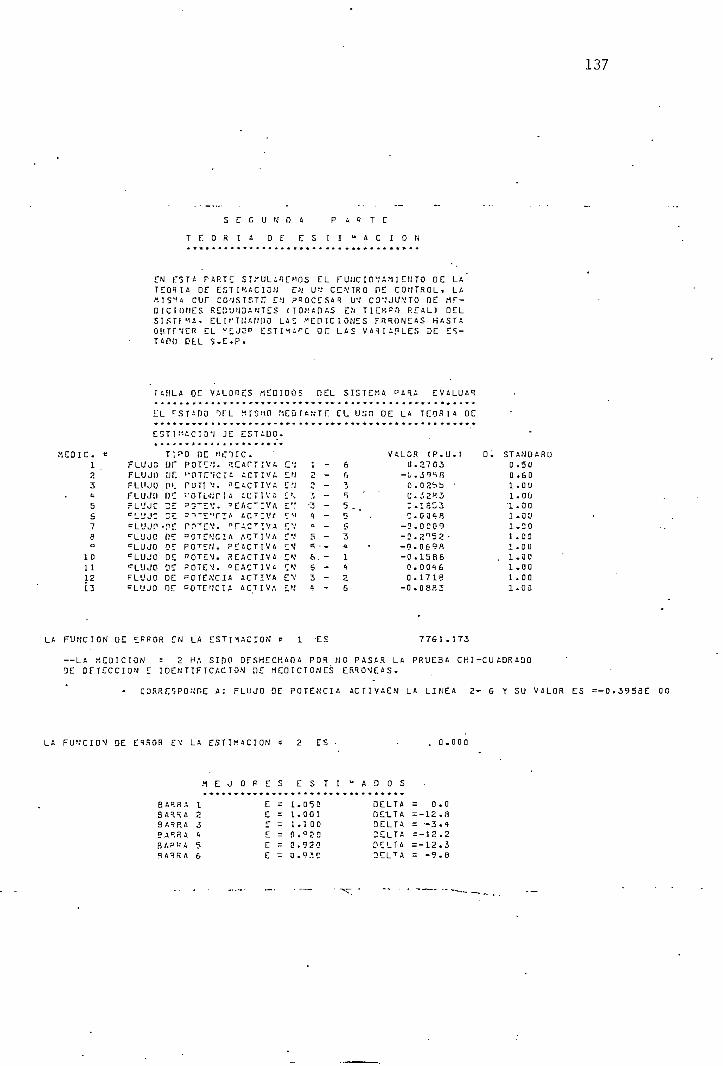
S E G U N ' D A P A R T E
T E O R Í A D E E S T I " A C I Ó N
137
EN E S T A P A R T E S I . V UL¿HEMQS EL FUIJCIO'J A« IEHTO DE LAT E O R Í A DE E S T I M A C I Ó N EN U-'.' C E N T R O PE C O N T R O L » UAM lS^ f l CUE CO 'JSTSTi : E-N P R O C E S A R U'J CONJUNTO DE MF-DICIOMES REDUNDANTES ( T O M A D A S EN TIEMPO REAL) DCLS I S T F . M A , ELifir.'tíjno L A C M C D I C IONES F F Í R O N E A S H A S T AO'ITfJER EL v CJOt> EST I M .a rc DE LA$ V A Í Ü P L E S DE ES-T A p í ) DE.L S . E * P .
TfiHLA DE VALORES HEDIDOS DEL SISTEMA ^ A R A E V A L U A R
H E O I C .123*557
10111213
rL ASTADO ir L MISMO MEDÍANTE EL USO DE LA TEORM DE
ESTP'-r-CIO'J JE ESTADO.
FLUJGFLUJ!)
FLUJOFLUJOFL'JJCCL'JJC^L'JJPCLUJOCLUJOCLUJO^L'JJOFLUJO^LUJO
TT'orur;p>.DI-EC-l•PfD^TOEDEDEDEor
^0 fiE ^-LPOTC''!-"OTE'iCTPUTI V.^OTt-tiC !P3'E\'.PT 'TI
pp-^v.°OTENCIPOTEN.POTE-J.POTE^.
1IC. ' VALOR (P.U.)REACTIVA1 ACTIVA"EACTIVAí, A C T I V A3EAC"VA••• ACT:VÍnrACTTVAA ACTIVAPTACTT VAREACTIVA°EACTIVt
POTENCIA ACTIVACQTE'JCI A ACTIVA
E'íENC'JE !*EVE"!*"*•E*'1EVE"JENEV£N
1 -2 -2 _7 _
•3 -4 -a —5 -S - -&. -£ -3 -1 -
6f,•x
55 " .?34
1
4
26
U-tjcIJcc
-a-D-n-000
-0
.2703
. -S^fi
. 0 2S b •
. 5 2 *í 3-1SC3.0048.OC09-2D52 --069R.1588.00^6.1718.08ñ2
D. S T A N D A R DO . S O
0 .601.0 U1.00'1.001.031.001 . 0 01.00
. 1.00 .1 . 0 01.001.00
LA FUNCIÓN DE E EN LA E S T I L A C I Ó N ES 7761.173
—LA «EDICIÓN = 2 HA SIDO D E S M E C H A D A POR NO P A S A R LA PRUEBA CHI -CUADRAOODE D E T E C C I Ó N E IDENTIF ICACIÓN HE MEDICIONES E R R Ó N E A S .
* C O R R E S P O N D E A: FLUJO DE P O T E N C I A A C T I V A E N LA LINEA 2- 6 Y SU V ñ L O R ES =-0.3953E 00
LA FUNCIÓN DE ERROR EV L& E S T I M A C I Ó N B ES - . 0 . 0 0 0
M E J O R E S E S T I
B A R R A 1B A R R A 23 A o P, A .5
B A R R A 6
E = 1.0^0E = 1.001E = 1.100
E = 0 .520E = O.^JC
DELTA = 0.0DE1_TA =-12.flDELTA = -3.tQELTA .=-12.2D E L T A =-12.33CLTA = -9.8

1
- 4
1
6
27
.03
CO
.
27
.03
01
2
^
4
f»
-P.B
30
0
-8
.82
98
1
• *
2
3
. P
.S'S
CO
'
2.5
50
0''
^
^ 5
3
2.S
3C
2
32
.P2
97
r'
. *
í
5
16
.53
00
• 1
8.5
30
0
. •
C"
- ^
? '
' C
.4P
.CC
0.1
79
97
* *
. 6
-r.3
9C
Q
-O.O
P.7
5^
J
5
3
-2
?.
52
20
•
-29
.?2
Q4
q
* "
' 5
4
-6
.95
00
-f,
. 9
79
9
'
1(1
* 5
1
. -1
5.8
80
0
' -1
5.R
79
911
A
. fi
-
1
0.4
60
0
• 0
,46
27
13
J
^
2
17
.18
00
• 1
7.1
90
0
TA
P.L
A
DE
F
LU
JO
S
l)E
P
OT
EN
CIA
C
AL
CU
LA
DO
S
AP
A«
TIR
D
E
LO
S
VA
LO
RE
S
OB
TE
NID
OS
A
L
AP
LI-
CA
R
LA
T
EQ
UIA
D
E
ES
TIM
AC
IÓN
. D
E
ES
TA
DO
,
RT
TO
FT
F.
DE
L
CA
LC
UL
O
DE
F
LU
JO
S
DF
. P
OT
EN
CT
i P
AR
A
EL
SIS
TE
MA
E
N
ES
TU
DIO
o.oo
0.0
0
O.C
Oo.
eo0
.00
0.0
?
2.8
1
O.C
O
0.0
0
0.0
0
0.5
9
O.C
O
X G
EN
ER
AC
IÓN
X
CA
RG
A *
-CA
P/f
lEA
C-X
A
LA2
AR
RA
'-¡O
^fR
C
VO
LT
S
¿'J
fiU
LO
M
W
*'V
ftR
M
U
My
AR
M
VA
R
-BA
RR
A
NO
MB
RE
(P.U
) (5
RA
D)
1
I.'O
^TH
l.
u'ó
S
0.0
?
b.2
7
43
.54
O
.QO
0
»0
0 -----^
^ S
OU
TH
' f>
LA
KE
2 "
A I
f.'
1.C
01
-1
2.R
-0
.0
1
-O.O
fi
5Ü
.QO
1
3*0
0
_---_
-.---.------_
__
3
CL
H6
L
AK
E_j
C
L M
1
.15
0
-í«
*i
bO
.Ul
lfi.5
l 0
«0
0
0.0
0
----------»
------.--
?
MA
IN
5
UL
M4
^C
OT
H
C.9
?0
-1
?.2
-Í
1.0
3
0.0
0
50
.00
5.0
0
_-_
----_
•-----------
1
NO
BT
H5
U
LM
ñ L
AK
T5
UL
M
C*
9?
0 ''—
1 ?
• 3
-0
.00
0
,00
3
0*
00
18
*0
0
«.-
— •
_-»
— — -
•_
_----.—
——
3 E
LM
4 S
OU
TH
ft
LA
KC
0
.92
0
-9
.ÍÍ
-0
.0
1
O.O
H
0.0
0
0.0
0
• -_
__
1
HO
PT
H^
M
AIN
1
SO
UT
H
MW
M
VA
R
TA
P
44
.33
2
2*
25
50
.91
•
27
. O
í
-1
5.4
2
£.5
5-3
9.5
9
-lh
.63
17
. 1
5
0.0
1
32
.83
1P
.53
.-1
1.6
8
-9.1
D0
.4P
7
. 1
5
1 .0
25
-8.'
8 3
-C
.Q?
'
-2
^.5
2
-1
1.
C2
-o.i
a
-h.9
R
-4
P.5
3
-1
5.8
83
9.5
9
1P
.01
1 .
10
0R
.92
0
.46
GEN
ERAC
IÓN
Y DE
MAN
DA
TOTA
L 14
5.22
6
2.0
7 1
35
.00
¿e
.co
CO oo

139
CASO 5.4. Ahora se aumentarán las mediciones de una en una, y en
cada aumento se probará si es posible detectar datos
erróneos. Esta prueba se realizará con 14, 15, 16 y 17 mediciones
(Ver la tabla de la siguiente página).
La prueba indica que todos los valores estimados son muy cercanos
a los reales. Esto implica que ya hay como estimar el estado del
sistema, pero, si se escoge el azar cualquier dato de los utiliza_
dos en cada estimación (dato importante) y se le cambia su valor,
es decir, se lo hace erróneo, al resolver el problema en una nueva
estimación la solución que se obtiene ya no es correcta, puesto -
que se deshechan datos correctos en lugar de los erróneos, más aún
si el valor escogido por su localización en el sistema es de gran
importancia. En este caso se deshechan tantas mediciones, hasta
que por falta de redundancia-termina el proceso.
Una conclusión válida en este punto radica en que por falta de re_
dundancia en el conjunto de mediciones no es posible detectar erro_
res de medición, es decir, hasta aquí" el proceso de estimación es
muy sensible a los cambios que se producen por efectos de una medj_
ción mala. "
Observación: Es posible detectar y eliminar a alguna medición siem_
pre y cuando el valor no sea de algún punto crítico o
no corresponda a alguna medición importante.
Algunos resultados del programa se muestran a continuación.

#'DE
MEDI
C.
14 15 16 17 —
VALO
RES
ESTIMAD.
ESTIMAD.
ESTIMAD..
ESTI
MAD.
REAL
ES
CASO
5.4.1.
5.4.2.
5.4.3.
5.4.4.
VARI
ABLE
S DE
ES
TADO
Vi
1.050
1.050.
1.050
1.050
1.050
61 0.'
0-.
0'. 0. 0.
V2
l-.OO
1.00
1.00
-.1.00
1.001
62
-12.8
-12.8
-12.8
-12.8
-12.8
V3
1.100
1.100
1:100
1.100
1.100
63 -3.4
-3.4
-3.4
-3.4
-3.4
V, 0.919
0.919
0.919
0.919
0.919
s.,
-12.2
-12.2
-12.2
-12.2
-12.2
V5
0.919
0.919
0.919
0.919
0.919
65
-12.3
-12.3
-12.3
-12.3
-12.3
V6
0.929
0.929
0.929
0.929
0.930
S6
-9.8
-9.8
-9.8
-9.8
'
-9.8
o

T F
O1
A
DE
ES
TI
MA
CI
ÓN
EN
E
ST
A p
A«
TE
SIM
ULA
RE
MO
S E
L F
UN
CIO
NA
MIE
NT
O
DE
LAT
EO
RÍA
t)C
E
ST
IMA
CIÓ
N
E'J
U
N
CC
NTR
O
DC
CO
NT
RO
L»
LAHI
SUA
nuí: C
ONSI
STE
FN PR
OCES
AR "U
N CO
NJUN
TO DE ME
-Q
IC1Q
NC
S R
ED
UN
DA
NTE
S IT
OfA
QA
S E
N T
IEM
PO
R
EA
L)
DE
LS
IST
EM
A,
CL
IMIN
AN
OO
LA
S M
ED
ICIO
NE
S E
RR
ÓN
EA
S H
AS
TA
OO
TE'-.
ER
EL
ME
JOR
ES
TIM
AD
O
DC
LAS
VAR
.I A
RLE
S D
E E
S-
TADC
1 O
TL
S.E
.P.
MII
DIC
. tr
1
1 fl
U 12 li
L'i
15
FL
FS
TA
OO
PfL
M
ISM
O
HE
DÍA
NT
E F
. L
US
O
DE
LA
T
EO
RÍA
D
E
CS
T ["
AC
IOtJ
0£
E
.STA
DO
.
TIF-
O OF
HEO
IC.
FLU
JO
CF
PO
TF
N.
RE
AC
TIV
A EN
FLUJ
O CE
POT
ENCI
A AC
TIVA
EN
PO
TEN
1. D
.C6C
TIV
A C
« LA
B
AR
RA
FLU
JO
OE
PO
UN
CIA
A
CT
IVA
EN
FLU
JO
EJE
PO
'TE
M.
RE
AC
TIV
A E
NCL
UJO
PE
P
OIE
NC
U
AC
TIV
A EM
eL
UJ
?
3E
PO
TC
V.
RE
AC
TIV
A EN
'
rOT
TM
. P
E-i
CT
IVA
EN
LA '
BA
RR
APO
TFN
." ^Í
-:AC
TIVA
EN
LA
BA
RR
APL
U.Í
3
3f
PO
T/J
CI
a A
»T
IVA
E
NFL
UJO
nc
p(n
i:Ȓ.
R
EA
CTI
VA
EN
FLU
JO
OF
PO
TEN
. O
EA
CTI
VA
FUri
'JJO
?
t i'O
'E-^U
A
CT
IVA
EV
•rL
UJ
O
DE
P
íUC
VC
U
AC
ÜV
A
C'(
1 2 2 T i t Ú 5 fv 6 <t t> & i 1
- 6
- &
- -
5-
5-
1-
6
- 6
- 1
-
t-
?.
- fi
VA
LO
R
(P
,U.)
0.2
70
3-O
.Í9
5B
-0.1
29
90
»3
?fl
3'
• Q
.lfl
Sa
-0
.4 1
66
' -0
.00
03
0.9
19
0.
' -0
.18
00
0*
00
00
.-0
.09
H3
' -O
.IS
Bfl
0.0
01
&0
.17
18
-O.Í
1R
83
STA
ND
AR
D0
.50
O.&
O1
.00
I .0
01
.00
1.0
01
.00
1 .C
fl1 .
00
1 .1
301
,00
1 .
00
1 .0
01 .
00
'1 .
00
LA
FU
'íCIO
'J
[)E
ER
R01
Ef
cJ LA
fS
TIM
AC
ION
o.oo
o
V-
EJ
OR
ES
ES
TI
MA
DO
S
¡ÍA
PR
A 1
g A
R K
A
?B
AC
RA
."•,
HA
GE
ÍA
»\ ¿
5 «
A
f.
PA
U'1
A
f>
r =
E
=r
=
r =
F
=
P
=
l-fl
-ífl
l.C
OC
.
1 .
1 D
D
0.^
1 Q
Q.C
I q
" • ?
29
DF
LT
A
=
0.0
DfL
TA
=-1
2. f
lD
EL
TA
=
-3
.1D
EL
TA
=-1
2,2
?fL
TA
=-!
?.. i
DfL
TA
=
-9.8
h-1
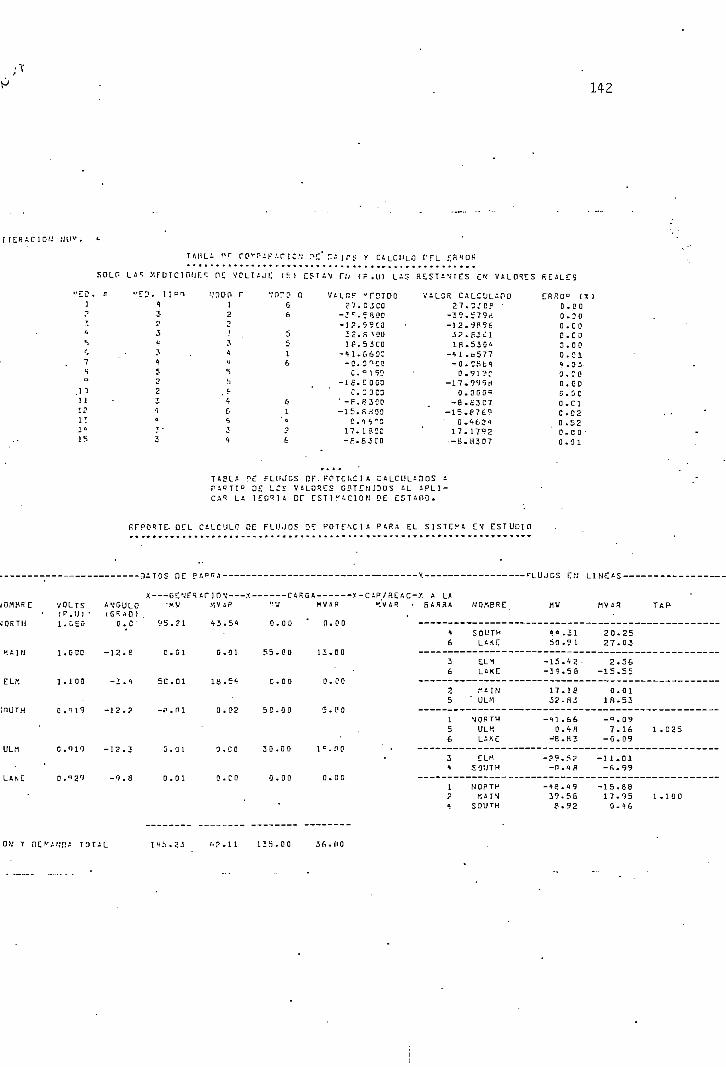
142
SOLO LAS MFDICIÍIÍIÍ:*: nc VOLTAJE tí: j r.sr¿\ CF.UI L¿S RE,ST¿VTES c<v V A L O R E S
IIEC . P VE:?. TIPI Í.^DO r -.'oro n V A L O F "FDIDO V ¿ L O R C A L C U L ^ P O1 t 1 e ? 7 . C 3 C O 2 7 . 3 J Ü P -^ -• 2 & - 3 r - í S O Q -39.Í79H* 2 2 -1? .99CO • -12.1íP96A 3 -' . 5 32.f i 121) 3 2 . B 3 C 164 f ? 5 1 F . 5 3 C O lfi.530<-e' , • •• * 1 -41-Í.Ó2C -1l.o5777 1 « 6 - O . O ^ C O -O.C.Stl* 5 H C. Q 1 9D • 0 .91 ?C
2 . ^ - 1 E . C O G O -17.999H.1- 2 .f ' C . - O C 3 0 . 3 0 0 =11 3 <f 6 ' - F . f j a S D m -6 .E3C71? 1 &• 1 -l&.fiíiGD * -15.f7£?1^ * ^ '" C.- l í i^G ' 0 .4 ¿34i" ?• -I ? 17. 132C ' 17.17°2iS 3 4 fc - f i .SSCD . - -B .H307
T 6 S L A PE FLUJOS O F . F C T E t ^ C l A C A L C U L A D O S AP A R T Í " DE LZS V A L O R E S OBTENIDOS ¿L iPLJ-CAR LA T E O R Í A DE EST I^ í -C ION DE E S T A D O .
REPORTE- DEL CALCULC- ^E FLUJOS D^ P O T E N C I A P A R A EL S I S T E M A EV ESTUDIO
REALES
E R R O 0 ( T )D . D Oo .:oO . C OD . C O3 . 0 0
Q.C11 .03.O . C O
0 . 0 0
G . Ü CO . C 1
C . 0 20 . 5 20 - 0 0 '0.01
, .
.
,
„_. :_ TTl^ nE ° ' ° c j - -— — — — -.__— — x _ _ — — — — _ — e"LU JOS E" LINEAS — — — — — — — — -
X GE'.'ERSCIOV X Cf lRGA X -CAP/P.EAC-X A LA •OMHRE
¡Ofi T II
M A I N
ELM
flUTH
ULM
LAhE
V O L T S ¿\'GULO 'My M V a P »'J M V f i P ^ . V A R .- f iARRA M O W B S E .
1 SOUTH6 L A A E
3 EL-í6 LflKE
5 ' ULM0.119 — 1 2 - ? -»1 • fl 1 O . Q 2 S C . O f 5 . t' Q _ — — — -— _,._.
1 N O R T H. 5 UL«
s L;«E
3 ELM1 SOUTH
1 NOPTH? KA r*j1 SOUTH -
MU H V A R
4 4 . 3 1 20.50 .91 27.
-15.12- 2.-39.56 -15.
17.38 0.3 2 - R 3 Ifi.
-41.66 -9.0 .4 f l 7.
-8.R3 -G.
-??.?? -11.-n.iR -6.
-4fi. 49 -15.
39.56 17.3.92 0.
TAP
2503
5655
0153
0916 1.02509
0199
S895 1.10016
1 1 . S . 2 3 f* ? -11 123.00 3 ñ . f l O

IT
ER
AC
IÓ
N M
U".
TA
BL
A
PC
C
O"P
AR
AC
ION
DE
T D
tlO
C
Y
CA
LC
UL
O
Í1E
L
ER
CO
R
SO
LO
L
AS
'ME
IJIC
IOH
rs
OC
V
OL
TA
JE
1 f .
) E
ST
A»
Efc
ÍP.t
l)
LA
S
en
. e
FCP.
TI
PO
1
*2
3
7 2
4 ?
c
t
f- 7 4
P. *>
9
?1
0
?
11
12
i
'11
* '
J*t
**
I1'-
<•
1 f»
?.
17
:•
NO
DO
P
1 2 2 3 1 * A •i H 6 6 t 6 *, *t T, ti
Non
o o
VALP
Pfi
. ?
7.
í.
-3
?.
-1?
.5
32
.5
1 f
; .
1 -U
'.f.
-0
.
C.
-1Í-
. c.i
-u.
(í -K
1 -I
b.
4 C
.5
' 7.
?
. 1
7.
C
-[•.H
ED
IDO
'
23
00
bl»
Ü3
99
0D
RiO
O5
30
0
fjft
OC
09
00
11
90
ÜO
OO
ocoo
.5
DO
O
Ü i
00
PÜ
30
'
u t.
an
IbC
O
l'rC
O
«1
00
RT
ST
AJ
lTrs
T
H
VA
LO
KC
S
hr¿
LC
S
V1
LO
R
CA
LC
UL
Afi
O2
7-3
1-1
?3
2
llt
-1 ] -02
-17 G
-1! fl
-e -i? 0 7
1 1
-í-
.03
12
.51
10
0
.Of'
t;?
.£7
00
.53
1 1
.65
96
. 0
8 £
6."
19
0.
9 1
F. 4
.00
07
. 4
98
2
.6 Í
CO
.ftT
í7.•
jfs
PS
. H
-. 1
9.1
79
3.I
i29
0
riR
OU
(
X)
0.0
ti
C.
DC
O.tl
0.0
0O
.C1
O.C
Q;
.79
0.3
00
,0 1
: .
-*ú
c .
c 2c .
^ oo.
• j
C .-1:
C «
i/
3
Í.:P
o . . .
o
lií'
LA ir
F
LU
J'J
S
DT
r-
C7
PA
CÍA
C
AL
CU
LA
DO
S A
r-An
T]i*
DE:
LOÍ
VA
LO"!
^ o
'-ir
-jiü
os
AL
AP
LI-
CA
P
LA
T
CO
°1
A
DE
C
f>l
I f
A C
! O
'J 3
ET
ES
TA
DO
.
FC
PC
PI
f O
CL
C
^L
CU
LC
O
C
FL
UJ
OS
f)
C
Pn
UN
Cl
A'P
AR
A
CL
S
IS
TE
MA
f
N
LS
TU
OI
O
X C
rVC
RA
ClO
'Y
X C
AR
GA
- X
- C
^/R
C
AC
-X
A
LA
i B
AR
RA
lV
OLI
S(P
.tD
(G
KA
D)
i.es
n r.
o
".yH
VíR
HV
H
VA
R
0.0
0 0
.00
U.V
AR
B
AR
RA
T A
P
SO
UT
H
UL
K
LA
KC
l.O
CO
-1
2.P
0
.01
1.1
00
-3
.*
bO
.Ol
0.9
19
-1?.2
-0
.01
0.0
1
55
.00
1
3.C
O
lfi.
51
g.o
o
0.0
2
50
.00
0.0
0
5,0
0
2.9
19
-1
?.3
0.0
10
.0
0
30
.0
0
1P
.OC
0.0
0O
.GO
n ñ 3 6 p 5 1 5 í- T.
•i J ? 4
SO
UT
H
LÍK
P
' Í'L
H
•L
AK
C
K A
1 H
ULÍ»
\OR
TM
UL
M
Lfi-;
n
TLH
SO
UT
H
\-ni>
TMM
AIN
SO
UT
H
6 *• .
3 1
M.'Jl
-!*.-?
- í
*= .
'-> í:
1 7
. 1
f»
* P . '• i
- * i .
n.
fl.
tH—
f* » ';
3
- ?
*) ,
H ?
- 5 .
't P
-^-f
-.^
O\5
.'--
B? .
n?
? 0 .
?7
.
^ .
-\ .
.
1 <
•.
-15 . 7.
""•
-1 1
.
-'. .
-I1
-.
17
.!. .
^ C3
*ft
--*1
01
b3
09 16
1 .
02
5
JQ
"1
nr(
«fl
V-C
1.1
00
tf

145
CASO 5.5. Esta prueba se realizará-con 18 mediciones.
En primera instancia se empezará suponiendo que todas las medicio-
nes son correctas y a lo largo de la prueba se cambiará, una medi-
ción 'buena por mala hasta obtener alguna conclusión. En este ana_
Tisis se tabularán los resultados para mejor comprensión. (Ver la
tabla de la siguiente página).-
En esta tabla se puede ver que todas las estimaciones son exceTerr-r.
tes a pesar de haber incluido progresivamente varios .errores; nóte_
se que al aumentar el número de mediciones erróneas a 4, el estima^
dor ya pierde el control, es decir, se han eliminado 5 mediciones
de la cual una es correcta. Asi, se puede concluir señalando que
con 18 mediciones se puede lograr una buena estimación, aún si hu_
bieran 3 datos erróneos, ya que si se utiliza un buen sistema de
medición para recoger la información del sistema, es poco probable
que esto ocurra.
Entonces se puede decir que la redundancia mínima requerida para
estimar un sistema será.de 0,6, esto es, si se considera que la re_
dundancia es igual a: - -. -
K - mr = k = # ¿e mediciones
mm = # de.variables de es_
tado.
Resultados del programa digital se muestran a continuación.

# DE
"MED
IC.
18 18 18 18 18
MEDI
CION
ES
ERR. 0 1 2 3 4
DESH.
0 1 2 3 • 5
VARI
ABLE
S DE
ESTADO
'.
Vi
1.05
1.05
1.05
1.05 --
Si 0. 0. 0. 0. --
V2
1.000
1.000
'l.OO
1.00 --
Ó2-12.8
-12.8'
-12.8
-12.8
--
V3
1.100
1.100
1.10
1.10 --
63 -3.4
-3.4
-3.4 3.4
--
V4
0.919
0.919
0.919
0.919
--
54
-12.2
-12.2
-12.2
-12.2
--
V5
0.919
0.919
0.919
0.919
--
S5
-12.3
-12.3
-12.3
-12.3
--
V6
0.929
0.929
0.929
0.929
—
S6
-9.8
-9.8
-9.8
-9.8
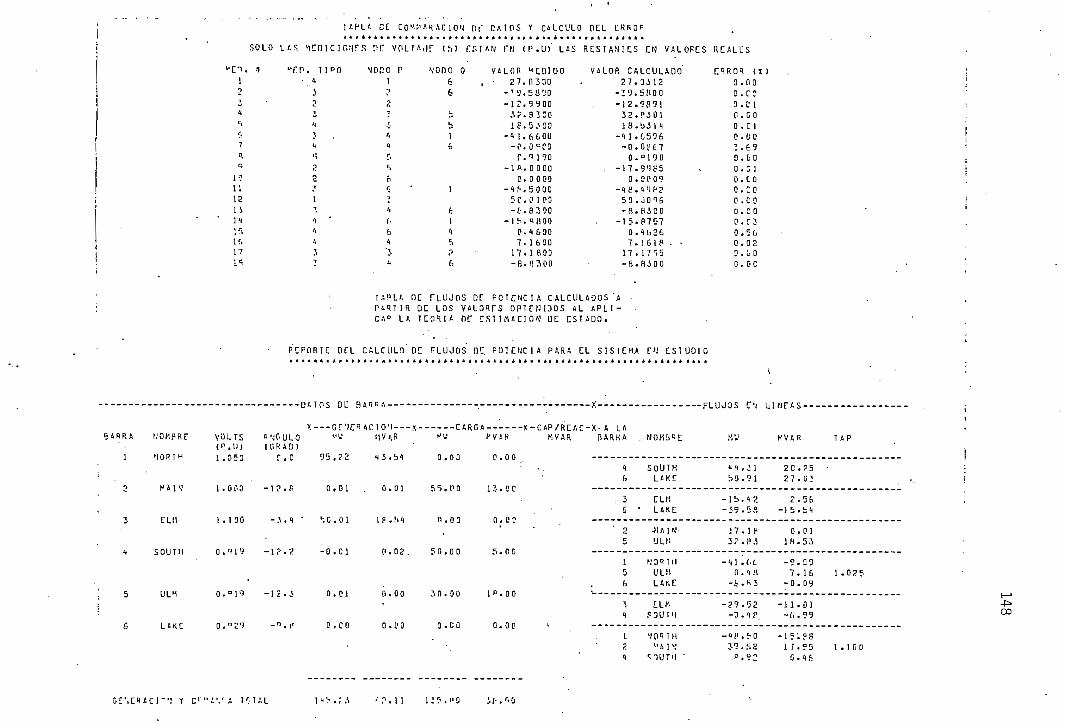
1-? 11 11 l'.í If, 17
AS
ME
Dic
ir..N
rs p
r VO
LTAJ
E IM
ES
TÁN
nj
ÍP.U
) LA
S RE
STAN
TES
EN V
ALOR
ES
REAL
ES
^rn
. TI
PO
*Jor
;a
n N
ono
o VA
LOR
MCO
IOO
VALO
R CA
LCUL
ADO'
E^
ROR
m•
4 i
3 ?
2 2
1
T
'1
-í
J
,
1
*t
1
q
r,
? c-
2 '
f. '
;i
r.
i :
"•- 'I
'1 "
f .'*
fl4
- íj
:. '3
7 *•
6
„ •
27
.03
30
6
-'9
.58
20
-ir.
99
00
5 3
? .
S 1
D 0
b
je*
5 ¿
30
1 -*
t.G
£.O
Ü6
. -P
.OaC
Or.
^ 19
0-1
A.
00
00
0.0
00
91
-M-.
50
QC
5C
.01
P3
fc
-Í-.
03
00
1 -I
.^.I
H 0
0t
0-1
60
05
. 7
.Í6
GO
P •
17
.18
00
ñ -e
. M3 D
O
27
.03
12
-29
.5H
OO
-12
.93
91
32
.P3
01
ÍB.Ü
3 H
-f
1 .f
c5
96
- 0
. 0
S É
7O
.°1
90
. -1
7.9
[!P
5O
.OP
09
-íjf
f .'('Jí'2
50
. JO
^S-f
l.H
iCD
-15
.87
C-7
0 . 1
ti 2
£7.
1
&1
8 •
•1
7.1
7S
5-f
i.ñ
iOO
0.0
0G
.CC
0 .
C 1
0.0
0
o.c
iC.
GO
1.6
9
o.t
o0
.3
1O
.CO
c.:o
O.C
O
O.C
O
p .
r 30
.5£
i0
.02
3.Ü
0O
.GC
TA
PL
A O
í T
LU
JOS
D
C P
OT
EN
CIA
C
AL
CU
LA
DO
S 'A
PA
RT
IR
OC
LO
S V
AL
OR
TS
OP
TT
HID
OS
AL
AP
LI-
CA
0 L
A
TE
OR
ÍA
Of
ES
TIM
AC
IÓN
D
E
ES
TA
DO
.
PC
PC
IRTE
D
fL
CA
LC
UL
O
DE
FL
UJO
S
DC
PO
TE
NC
IA
PA
RA
EL
SIS
TC
M.A
C
fJ
ES
TU
DIO
Rfi
RR
A N
OK
PR
r V
OL
TS
A \C
-ULO
VV
')
VA
R y"
^V
fiR
K
VA
R B
AR
HA
(f .
11)
(tiF
<&
0)
: t
' •
• •
. '
6
• •
- •
.3 e
* 2 K 1 f)
i '
^
- .
L ? t
. N
OM
BR
E
SO
UT
HL
ÍKE
ELH
• L
AK
E
UL
H
ULH
LA
KE
SW
Í'I
.OR
TH
<:^U
^'^
'
MW
bd
-15
-39 37
-U
n -t
-29
-.fpf
» 0
L r/
L
,31
.91
.42
r. o
.1H
'.Í-
L
. '» íl
.^3
.52
.50
.92
.- 1
n L
h $
KV
AR
20
.2
7.
e. •
-1 b
.
0.
7.
-0
.
-U
.
-15
;1 7
.5
.
?5
ti 2
56
01
53 16 09
01
?8
4£
TAP
;
1 .0
25
-P* co

T E O R Í A D E - E S T I M A C I Ó N
EN ESTA P A R T E S I M U L A R E M O S EL F U N C I O N A M I E N T O DE LAT E O R Í A DE E S T I M A C I Ó N EN UN C E N T R O DE C O N T R O L » LAMISMA OUE C O N S I S T E EN P R O C E S A R UN C O N J U N T O DE ME-DICIONES R E D U N D A N T E S ( T O B A D A S Eh TIEMPO R E A L ) DELS I S T E M A » E L I M I N A N D O L A S MEDIC IONES E R R Ó N E A S H A S T AOBTENER EL M E J O R E S T I M A D O DE LAS V A R I A B L E S DE ES-T A D O DEL S.E.P.
H9
TABLA DE VALORES MEDIDOS DEL SISTEMA PARA EVALUAR****•*•-***-••**•-* A»»»»*-*»»**»-»-** *»» ***•»**•***»***-»•- + *
EL ESTADO DEL MISMO M E D I A N T E EL USO DE LA TEORÍA DE
ESTIMACIÓN DE ESTADO.
MEDIC. a TIPO DE MEDIC.1 FLUJO DE POTEN. RE A C T I V A EN1 1 - 62 'FLUJO DE POTENCIA ACTIVA EN 2 - $3 POTEN.. REACTIVA EN LA BARRA 24 FLUJO DE POTENCIA ACTIVA EN 3 - 55 FLUJO DE POTEN. REACTIVA EN 3 - 56 FLUJO DE POTENCIA ACTIVA EN 4 - 17 FLUJO DE POTEN. REACTIVA EN 4 - 68 • VOLTAJE EN LA B A R R A 5? POTEN'. REACTIVA EN L-ft B A R R A 5
10 POTEN, REACTIVA EN LA B A R R A 6'11 FLUJO DE POTENCIA ACTIVA EN 6 - 112 POTENCIA ACTIVA EN LA B A R R A 313 FLUJO DE POTENCIA ACTIVA EN 4 - 611 FLUJO DE POTEN. R E A C T I V A . E N 6 - 115 FLUJO DE POTEN'. REACTIVA EN 6 - 416 FLUJO DE POTEN. REACTIVA EN 1 - 517 FLUJO DE POTENCIA ACTIVA £N 3 - 218 FLUJO DE POTENCIA ACTIVA EN 4 - '6
VALOR (P . U . )0.0703
-C.3958-O .12990.32830.1853-0.1166-0.1009G .9190
-0.1-8000.0000
-Q.4o500.2001
-0.3BS3-0.15885.00460.07160.1718
-0.0883
STANDARDO .50O .60 -.00> O u.00
.00l.Ou1 .' O O1 • O J1 .00.1.001 .00
. 1 .001 .001.00
• 1.001 .00
L£ PUNCIÓN DE ERROR EN LA ESTIMACIÓN, tt ES 677,383
—LA MEDICIÓN V 1 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
' CORRESPONDE A: FLUJO DE POTENCIA REACTIVA "E'N LA LINEA 1 - 6 Y SU V A L O R FS = O,
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN 2 ES 353-601
—LA MEDICIÓN * 12 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACION DE MEDICIONES ERRÓNEAS.
\ CORRESPONDE A: POTENCIA ACTIVA EN LA B A R R A 3 Y SU VALOR ES = D.2001E 00
LA FUNCIÓN DE ERROR FN LA ESTIMACIÓN íf ES 61.437
—LA MEDICIÓN * 7 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHI-CUADRADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
- CORRESPONDE A I FLUJO DE POTENCIA REACTIVA EN LA LINEA 4 - 6 Y SU VfiLOR ES =-0.
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN * . 4 ES 0 . 0 0 0
M E J O R E S E S T I M A D O S
B A R R A3APRABAR* AB A R R AB A R R ABARRA
12T;
•4r,
ó
E =E =E =E -r. -E =
1^i
0Q
3
.050
. 0 Ü 0
.1 00
.919
.919
.929
DELTADELTADELTADELTADELTA
, DELTA
-
= -== -= -=
012-31212-9
.0
.8
.1
.2
.3
.3
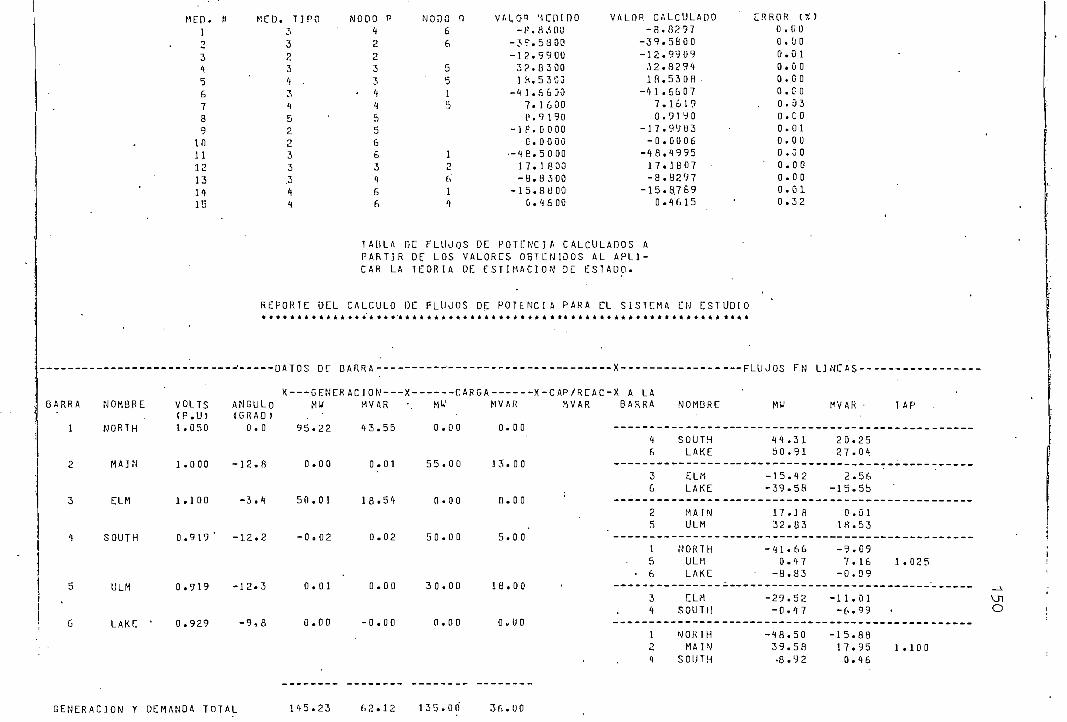
ME
O. 1 2 3 5 S 7 8 9
10 U 12 13 14 15
tí M
EO
. T
IPO
N
OD
O
P
NO
DO
fl
V
AL
.O*
ME
DID
O
VA
LO
R
CA
LC
UL
AD
O
' E
RR
OR
<
X )
3 4
6 •
-í'.
BS
flU
3
2.
6
-3?
. 5
80
0Z
2 -1
2.9
90
03
35
3
2.8
30
0'
4
. 3
'5
1
K.5
3G
O3
-4
1
-41
.6
63
04
4 5
7.1
60
05
' "
5 0
.91
90
2 5
-1P
.OO
OO
2 6
G.O
GO
O3
6
1
-4
6,5
00
0.
3
3
2
17
.18
00
3 4
b
-8.8
30
04
6
1
-15
.88
00
4 '
6 4
&.4
60
G
TA
BL
A D
E
FL
UJ
OS
D
E
PO
TE
NC
IA
CA
LC
UL
AD
OS
PA
RT
IR
DE
L
OS
V
AL
OR
ES
O
BT
EN
IDO
S
AL
AP
LI
CA
R L
A
TE
OR
ÍA
DE
E
ST
IMA
CIÓ
N
DE
E
ST
AD
O.
-8.8
29
7-3
S.5
SO
O-1
2.9
:50
93
2*8
29
41
8.5
30
8 •
-'(1
.66
07
7.1
61
90
.91
90
-17
.59
03
-0
.00
06
-48
.49
95
17
.18
07
•
•-a
. 8
2 9
7-1
5.8
.76
90
.46
15
A -
O.G
O
0.0
0
0.0
1
O.ú
O
0.0
0
O.G
OO
.D3
O.C
O
0.0
10
.00
0.0
0
' 0
.0
0
0.0
0
0.0
10
.32
•
.
RE
PO
RT
E
DE
L C
AL
CU
LO
D
E
FL
UJ
OS
D
E
PO
TE
NC
IA
PA
RA
E'L
S
IST
EM
A
EN
E
ST
UD
IO
BA
RR
A N
OM
BR
E
VO
LT
S(P
.U)
1
NO
RT
H
1.0
50
2 M
AIN
1
.00
0
3 E
LM
1.1
00
4 S
OU
TH
0.9
19
5 U
LM
0
.91
9
6 L
AK
E
' 0
.92
9
._ p r
M r
D *
f* i
n M
v
P A
D r
A
_ v
— p
AD
/orn
/"-
— v
«
~ —
•"O
t.lM
t.H
AL
1 U
IV —
— —
A —
— —
~
— L
. A
Kü
A—
— — "
""A
— U
Ar
/ K L
A L
A
A
- —
— —
— —
- —
— -
— -
— —
f- L
U u U
i t
N
LA
• '
ÁN
GU
LO
M
W
MV
AR
-. M
W.
MV
AR
MV
AR
BA
RR
A N
OM
BR
E(G
RA
O)
. '
0.0
9
5*
22
43
.55
0
.00
0
.00
-
— —
-
— 1
2.8
0
.00
0.0
1
55
.00
13
.00
—
— — -
;•"
3.4
5
0.0
1
18
» 5
4 0
.00
fl
.OO
—
— — -
— 1
2.2
—
0 B
0 2
0.0
2
50
.00
5.0
0
' —
— —
•
in
i n
ni
nn
n
tn
nn
ic
in
n
• _
_ .. ..
— 1
¿*
o
U.U
I U
.UU
J
U.U
U
Ic
.U
U
—
9n
n
nn
n
nn
n
nn
n
íi n
_
— _
_,ü
u
.uu
—
u.y
u
u.u
u
Uo
uu
— —
— -
4 S
OU
TH
6 L
AK
E
3 E
LM
6 L
AK
E
2 •
MA
IN5
ULM
1
NO
RT
H5
ULM
6 L
AK
E
3 E
LM4
SO
UT
H
1
NO
KT
H2
MA
IN4
SO
UT
H
MW
'
44
.31
50 .9
1
-15
.42
-39
.58
17
.18
32
.83
-4
1.6
60
.47
-8.8
3
-29
.52
-0
.47
-48
.50
39
.58
-8.9
2
MV
AR
• TA
P
20
.25
27
.04
2.5
6
-15
. 5
b
0.0
1lí
V.5
3
-9.0
97
.16
1.0
25
-0
.09
-1 1
.0
1-6
.99
-15
.88
17
.95
1.1
00
0.4
6
o
GENERACIÓN
Y DEMANDA TOTAL
145.23
62.12 135.00
3 r>.
u o

T E O R Í A D E E S T I M A C I Ó N
EN ESTA eftRTE SIMULAREMOS. EL F Uí-JC ION A'MI EMTO DE LATEORÍA DE ESTIMACIÓN Fh UN CENTRO DE CONTROL, LAMISMA GUE CONSISTE: EN PROCESAR UN CONJUNTO DE HE*DICIOÑES REDUNDANTES (TOBADAS EN TIEMPO REAL) DE1LSISTEMA» ELIMINANDO LAS MEDICIONES ERRÓNEAS HASTAOBTENER EL MEJOR ESTIMADO DE LAS VARIABLES DE ES-TADO -DEL S.E.P . '
151-
TABLA DE V A L O R E S MEDIDOS DEL SISTEMA P A R A EVALUAR
EL ESTADO DEL 'MSMO MEDIANTF EL USO DE LA TEORÍA DE
M E D I C .123*t5678g
1 O1112131415i 61718
ESTIMACIÓN DE ESTADO,
TIFO DE MEDIC.FLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA A C T I V A ENPOTEN. REACTIVA EN LA B A R R AFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. R E A C T I V A ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA EN
POTEN, REACTIVA EN LA E A P P, APOTEN. R E A C T I V A EN LA B A R R AFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA EN L A . B A R R AFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA. ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA EN
1 -?. -
. 23 -3 -4 -4 -556fe -3
4 -
fe -6 -4 -3 -4 -
fefe
5516
1
614526 •
VALOR (P.U.)0.0703-0.3958-0.1299G.32830.1853
-0.4166-3,10090.9190
-Q.1BOO0.0000
-G.4S5Q0.2001
-O.Q8B3• 0.15BB
0*0046. 0.07160.1718
-0.0883
S T A N D A R D0 . 5 0
0 .60
1 » G O
1.001 * 0 01.00
1 .001 .001 .001.0 O1.00
l . G O
1.00
•1.001.00
• i . o o1.001.00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ES 613.931
—LA MEDICIÓN a 17 H,a SIDO D E S K E C H A D A POR NO P A S A R LA P R U E B A C H I - C U A D R A D ODE DETECCIÓN E IDENTIFICACIÓN DE ".EDICIONES ERRÓNEAS.'
CORRESPONDE A: FLUJO DE POTENCIA ACTIVAEN LA LINEA 2 Y SU VALOR ES = G.171
LA F U N C I Ó N DE E R R O R EN LA E S T I M A C I Ó N 2 -ES
—LA MEDICIÓN 3 9 HA SIDO D E S K E C H A D A POR NO P A S A R LA P R U E B A C H I - C U A D R A D ODE D E T E C C I Ó N E I D E N T I F I C A C I Ó N DE MEDICIONES E R R Ó N E A S . .
C O R R E S P O N D E A: P O T E N C I A R E A C T I V A EN LA B A R R A 5 Y SU V A L O R ES =-0.1800E 00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN S 3 ES 631.B79
—LA MEDICIÓN Ü 16 HA SIDO DESMECHADA POR NO PASAR LA PRUEBA CHl-CUAORADODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
* CORRESPONDE A: FLUJO DE POTENCIA REACTIVA EN LA LINEA H- 5 Y SU VALOR ES = O,
.LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ES 859.491
—LA MEDICIÓN « 2 HA SIDO DESMECHADA POP NO P A S A R LA P R U E B A C H I - C U A D R A D ODE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS.
* CORRESPONDE A t FLUJO DE P O T E N C I A A C T I V A E N LA LINEA 2- 6 Y SU V A L O R ES =-0.39'
LA FUNCIÓN DE E R R O R EN LA E S T I M A C I Ó N a ES- 2914
— LA MEDICIÓN * 3 HA SICO 3ECBECHADÜ PQF KT O PASAR LA PRUEBA CHI-CUADRADOC»C DETECCIÓN E IDENTIFICACIÓN DE viFD1 C IO\E.S ERRÓNEAS.
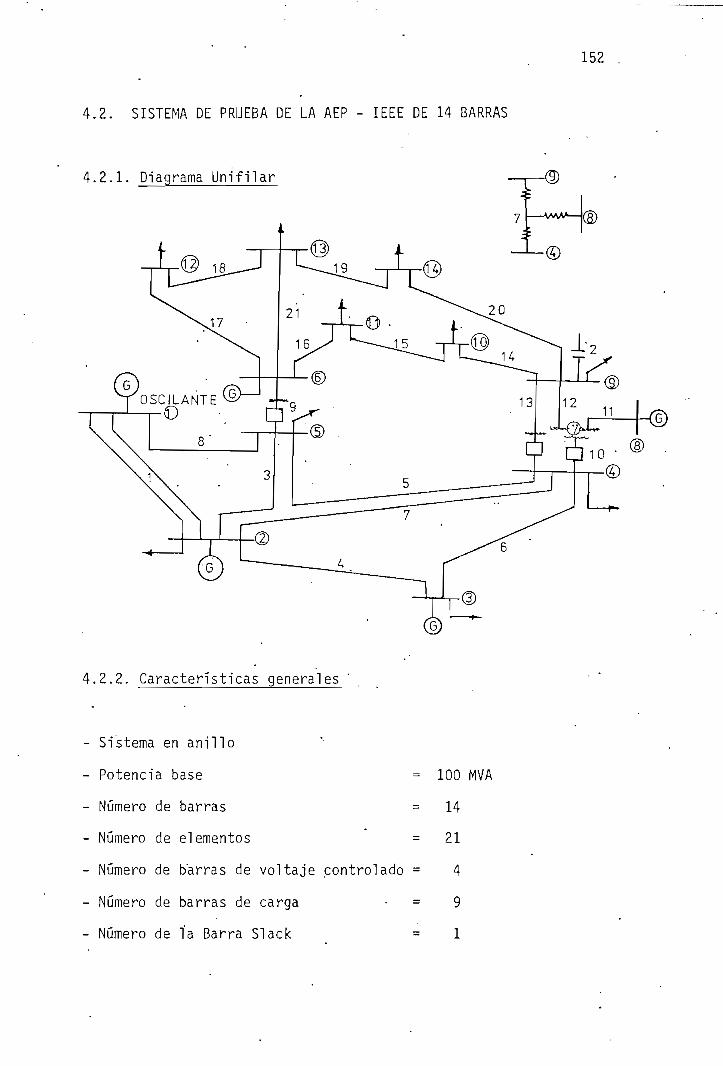
152
4.2. SISTEMA DE PRUEBA DE LA AEP - IEEE DE 14 BARRAS
4.2.1. Diagrama Unifilar
4.2.2. Características generales
Sistema en anillo
Potencia base = 100 MVA
Número de barras = 14
Número de elementos = 21
Numero de barras de voltaje controlado = 4
Numero de barras de carga • = 9
Número de la Barra Slack = 1

153
- Datos en p.u,
- Criterio de convergencia para el flujo de potencia: e = 0.001
- Criterio de convergencia para Estimación de Estado: e = 0.0001
4.2.3. Datos de Líneas, Transformadores y Cap/React.
ELEMENTO
1
2
3
4
5
6
7
8
" 9
10
11
12
13
14
' 15 '
16
17
18
19
20
21
NODO'P
1
9
2
2
4
• 3
2
1
5
4
7
7
4
9
10
6
6
12
13
9
6
NODOQ
2
15
5
3
5
4
4
5
6
7
8
9
9
10
11
11
12
13
14
14
13
IMPEDANCIA
RESISTENCIA
0.01938
0.0000
0.05695
0.04699
0.01335
0.06701
0.05811
0.05403
0.0000
0.0000
0.0000
0.0000
0.0000
0.03181
0.08205
0.09498
0.12291
0.22092.
0.17093
0.12711
0.06615
REACTANCIA
0.05917
-5.2633
0.17388
• 0.19797
- 0.04211
0.17103
0.17632
0.22304
0.25202
0.2091.2
0.17615
0.11001
0.55618
0.08450
0.19207
0.19890
0.25581
0.19988.
0.34802
0.27038
0.13027
SUSCEPTANCIAy pq/2 (piu)
0.0264
0.
0.017.
0.0219
0.0064
0.0173
0.0187
0.0246
>
TIPO DE
ELEMENTO
LINEA
CAP/REACT
LINEA
LINEA
LINEA
LINEA
LINEA
LINEA
TRANSF.
TRANSF.
LINEA
LINEA
TRANSF.
LINEA
LINEA
LINEA
LINEA
LINEA
LINEA '
LINEA
LINEA
TAP
•
1.07296
1.02250
1.03199
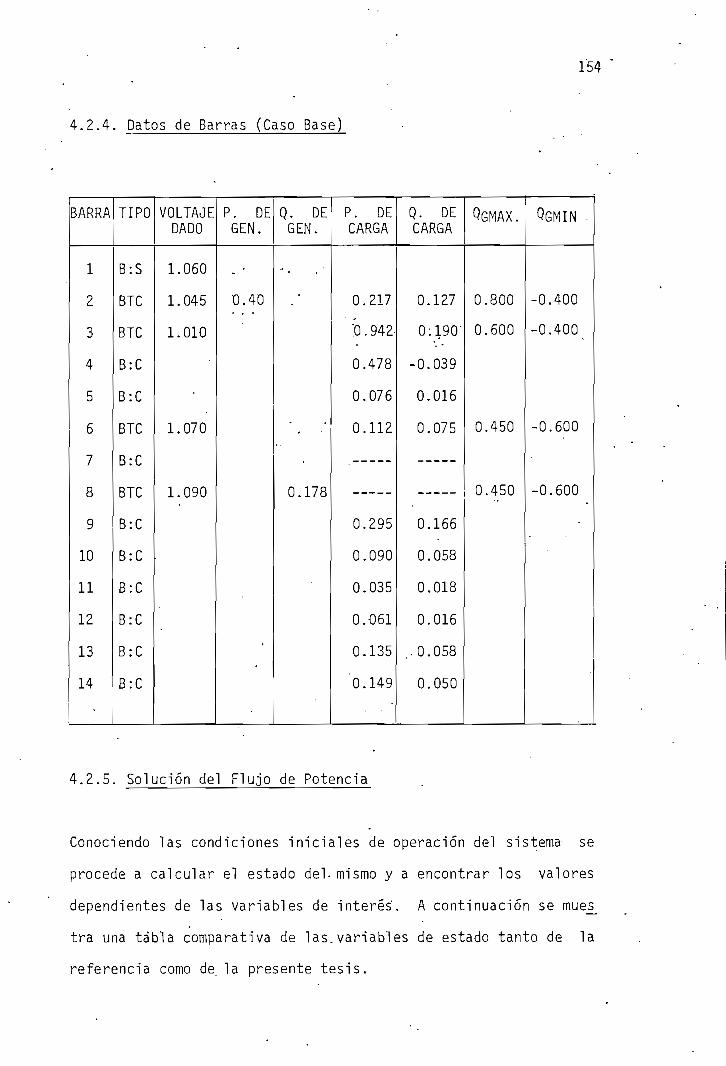
4.2.4. Datos de Barras (Caso Base)
154
BARRA
1
2
3
4
5
6
7/
oo
9
10
11
12
13
14
TIPO
B:S
BTC
BTC
B . r.L
B:C
BTC
R-rD . O
RTPD 1 \j
D * rD . L
B . r: L
B . r.L
B . p. t
B . p. L
B . p. t
VOLTAJEDADO
1.060
1.045
1.010
1.070
i non1 . U-?U
P. DEGEN.
. p
0.40
•
Q. DEGEN.
•• .
-
- ' •
n 1 7ñU . 1 / O
P. DECARGA
0.217
í . 942-
0.478
0.076
0.112
0.295
0.090
0.035
0.061
0.135
'0.149
Q. DECARGA
0.127
0:190"
-0.039
0.016
0.075
0.166
0.058
0.018
0.016
..0.058
0.050
QGMAX.
0.800
0.600
0.450
0 450w . T *J \J
QGMIN .
-0.400
-0.400t
-0.600
-0.600
4.2.5. Solución del Flujo de Potencia
Conociendo las condiciones iniciales de operación del sistema se
procede a calcular el estado del- mismo y a encontrar los valores
dependientes de las variables de interés. A continuación se mues_
tra una tabla comparativa de las.variables de estado tanto de la
referencia como de la presente tesis.
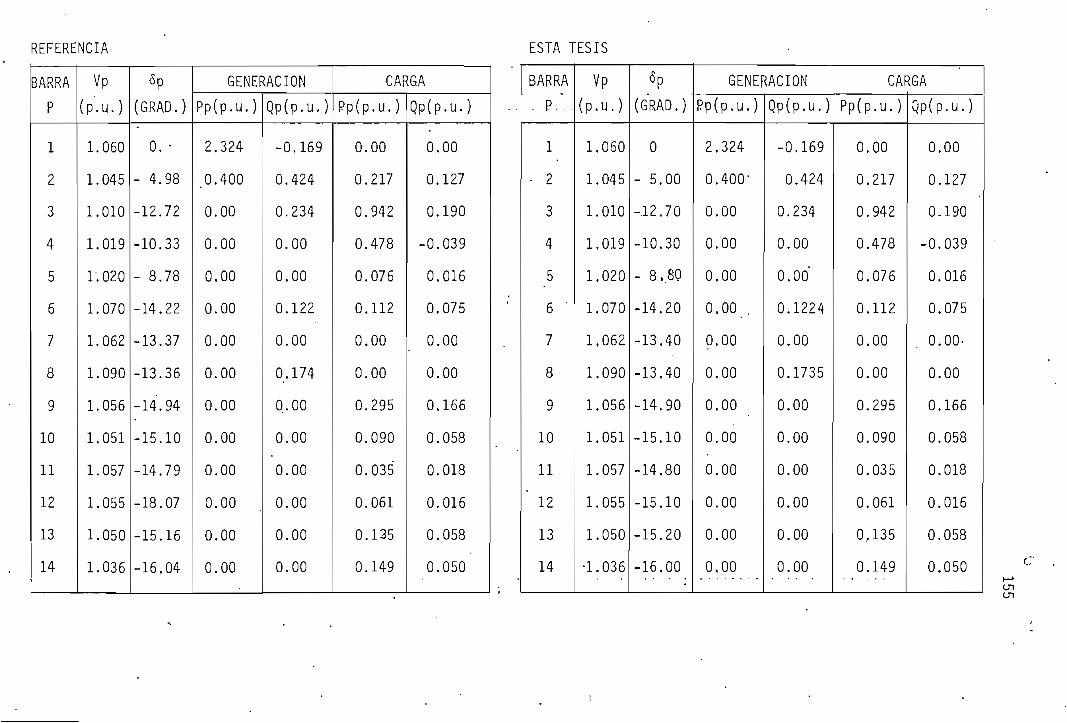
REF
EREN
CIA
ESTA
TE
SIS
BARR
A
P 1 2 3 4 5 6 7 8 -9 10 11 12 13 14
VP(p
.u.)
1.06
0
1.04
5
1.01
0
1.01
9
r.ozo
1.07
0
1.06
2
1.09
0
1.05
6
1.05
1
1.05
7
1.05
5
1.05
0
1.03
6
6p
(GRA
D.)
0.
•
- 4.
98
-12.
72
-10.
33
- 8.
78
-14.
22
-13.
37
-13.
36
-14.
94
-15.
10
-14.
79
-18.
07
-15.
16
-16.
04
GENE
RACI
ÓN
Ppí
p.u.
)
2.32
4
.0.4
00
0.00
0.0
0
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
Qp(
p.u.
)
-0.1
69
0.42
4
0.23
4
0.0
0
0.00
0.12
2
0.00
0^.1
74
q.oo
0.00
0.00
0.0
0
0.0
0
0.00
CARG
A
Pp(
p.u.
)
0.00
0.21
7
0.94
2
0.47
8
0.07
6
0,11
2
0.00
0.00
0.29
5
0.09
0
0.03
5
0.06
1
0.13
5
0.14
9
Qp(
p.u.
)
0.0
0
0.12
7
0.19
0
-0.0
39
0,01
6
0.07
5
0.00
0.00
0.16
6
0.05
8
0.01
8
0.01
6
0.05
8
0.05
0
BARR
A
. P.
~, .
1
• 2 3 4 5 6 7 8 9 10 11 12 13 14
Vp
(p.u.)
1.060
1.045
1.010
1,019
1.020
1.070
1.062
1,090
1.056
1.051
1.057
1.055
1.050
•1.036
Sp(G
RAO.
)
0
- 5.00
-12.70
-10.30
- 8.
.80
-14.20
-13,40
-13.40
-14.90
-15.10
-14.80
-15.10
-15.20
-16.00
•
GENE
RACI
ÓN
Pp(p
.u.)
2,324
0.400'
0.00
0.00
0,00
0,00
.
0,00
0.00
0.00
0.00
0.00
0.00
0.00
0,00
Qp(p
.u.)
-0.169
0.424
0.234
0.00
0.00
0.1224
0.00
0.1735
0.00
0.00
0.00
0.00
0.00
0.00
CARG
A
Pp(p
.u.)
0.00
0.217
0.942
0.478
0.076
0.112
0.00
0.00
0.295
0.090
0.035
0.061
0,135
0.149
Qp(p
.u.)
0.00
0.127
0.190
-0.039
0.016
0.075
0.00-
0.00
0.166
0.058
0.018
0.016
0.058
0.050

1S6 -.
Como se puede apreciar los resultados son. satisfactorios. A partir
de este momento se entrará a simular las mediciones del sistema -que
se utilizarán en los casos de estudio a analizar, así:
4.2.6. Casos de Estudio en el Análisis de Estimación de Estado
A continuación se enunciarán .los casos más importantes del comporta-
miento de la teoría de Estimación de Estado a evaluar con este ejem_
pío: ,
- Aplicación del criterio de redundancia en el proceso de estimacióa
Determinación del máximo numero de mediciones erróneas con un
do de redundancia específico.
- Determinación de la mínima redundancia necesaria para obtener una
buena estimación, considerando los criterios dados de Observabili-
dad de redes.
CASO 1. APLICACIÓN DEL CRITERIO DE REDUNDANCIA EN EL PROCESO DE ES-
TIMACIÓN
Al igual que se hizo en el ejemplo anterior y considerando que el
criterio de dar suficiente redundancia es muy importante dentro del
análisis de la teoría de Estimación para obtener los mejores estima_
dos del .sistema, se pasará a evaluar el mismo tomando como punto .de
partida un conjunto de mediciones simuladas.

157
. El procedimiento es el siguiente;
Se iniciará la primera estimación con 31 mediciones, para luego au_
mentar a 35 y en lo sucesivo en pasos de 5 mediciones hasta comple_
tar un total de 55 mediciones del sistema. Los resultados se tabu_
lan en la tabla de la siguiente página.
ANÁLISIS DE RESULTADOS
Al realizar el análisis global de los resultados se puede decir con
bastante satisfacción que estos son muy buenos, sin embargo al ir
revisando paso a paso las.pruebas"se vé que hay pequeñas variacio^
nes en cada" una de las estimaciones, as! por ejemplo:
- En la primera estimación nótese que los estimados de las-variables
señaladas con un asterisco difieren de los valores reales (varia-
ciones mínimas), esto posiblemente se debe a la falta de informa-
ción de esas partes del sistema, es decir, falta redundancia en
el conjunto total de muestras.
- En la segunda estimación ya_se han corregido los valores de las
variables que tuvieron un pequeño error, sin embargo, aparecen va_
riaciones en otras partes del sistema, esto implica que todavía
la redundancia no es suficiente para estimar el estado del siste_
ma. .
- En la tercera estimación prácticamente ha ocurrido lo mismo, es

VARI
ABLE
SDE
ES
TADO
Vi
61 Vz
<52
V3 63
' v;
V5
65 V5
Se V7 57 V8
60
V9
69 Vio
Si
o -
Vu
fin
Vl2
6l
2
Vl
3
¿1
3
Vm
614
VALO
RES
VERD
ADER
OS
1.06
00. 1.
045
•-
5.0 1.01
0-1
2.7
1.01
9-1
0.3 1.02
0-
8.S 1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
4.9
1.05
1-1
5.1 1.05
7-1
4.8
1.05
5-1
5.1 1.05
0-1
5.2 1.03
6-1
6.0
ESTI
MAC
IÓN
CON
31 M
ED
1.06
00. 1.
045
.-
5.0 1.01
00-1
2.7
1.01
8*-1
0.3
1.02
0-
8.8 1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
4.9
.1
.05
1-1
5.1 1.05
6*-1
4.7*
1.05
5-1
5.1 1.05
1*-1
5.2
1.03
6-1
6.0
ESTI
MAC
IÓN
CON
35 M
ED.
1.06
00
. 1.04
5-
5.0 1..0
10-1
2.7
1.01
9-1
0.3 1.02
0-
8.8 1.07
0-1
4.2
1.06
2-1
3.4
•'1.
090
-13
.41.
057'
*-1
4.9
1.05
2 *
-15
.1 1.05
7-1
4.8
.1.0
56
*-1
5.1 1.0
51
*-1
5.2 1.03
6-1
6.0
ESTI
MAC
IÓN
CON
40 M
ED
1.06
00. 1.
045
- 5
.0 1,01
0.¿
12,7
1.01
8*-1
0.3 1.02
0-
8.8
•1.0
70-1
4.2
•1.0
62-1
3.4
1.09
0-1
3.4
1.05
6-1
5.0*
1.05
1-1
5.1 1.05
6*-1
4.8
.1.0
55-1
5.1 1.05
1*'-
15
.2 1.03
6-1
6.0
ESTI
MAC
IÓN
CON
45 M
ED
1.06
00. 1.
045
- 5
.0 1.01
0-1
2.7
1.01
8*-1
0.3
•1.
020
•- 8
.8 1.07
0-1
4.2
1.0
62
'-1
3.4
1.0
90
-13.
41.
056
-15.
0*1
.05
1-1
5.1 1.05
7-1
4.8
1.05
5-1
5.1 1.05
0-1
5.2
1.03
6-1
6.0
ESTI
MAC
IÓN
CON
50 M
ED
1.06
00. 1.
045
- 5
,0 1.01
0-.
12.7
.1.
018*
-10.
31.
020
- 8
.8 1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1,05
6-1
5.0*
1.0
51
-15
.1 1.05
7-1
4.8
• 1.0
55
-15
.1 1.05
0-1
5.2 1.03
6-1
6.0
ESTI
MAC
IÓN
CON
55 M
ED
1.06
00. 1.
045
- 5
.0.
1.01
0-1
2.7
1,01
8*-1
0.3
1.02
0-
8.8 1.07
0-1
4,2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
5.0*
1.05
1-1
5.1 1.05
7-1
4.8
1.05
5-1
5.1 1.05
0-1
5.2
1.03
6-1
6.0
en CO
1519
decir, falta redundancia en el conjunto de mediciones.
Sin embargo, a partir de la cuarta estimación el número de varia-
ciones en los estimados disminuyen; esto nos muestra que a partir
de una redundancia del 60% el estimador es más estable en la obten_
clon de la solución del sistema, conclusión que fue mencionada en
el ejemplo anterior.
Observación.- Esta prueba ha sido realizada con mediciones Ideales
del sistema y desviaciones standard Iguales a la unidad para po-
der observar con' mayor precisión los cambios que se suceden a "lo
largo de la prueba. También cabe mencionar que en e'sta no se ha -
incluido ningún error de medición.
CASO 2. DETERMINACIÓN DEL MÁXIMO NUMERO DE MEDICIONES ERRÓNEAS CON
UN GRADO DE REDUNDANCIA ESPECIFICO.
En el ejemplo anterior se comprobó que el porcentaje máximo de da_
tos erróneos que pueden ser deshechados por el estimador, respecto
al número total de mediciones variaba de acuerdo al grado de redun_
dáñela de la prueba, y que para un caso sobredeterminado éste esta_
ba entre el Z5 y 30% (Caso extremo). En la presente prueba corro_
boraremos esta afirmación.
Procedimiento de prueba.- El procedimiento a seguir es el siguien-
te:

160
Se iniciará la estimación con 60 mediciones verdaderas (grado de
redundancia de 1.22), y luego en cada nueva estimación se cambiará
un dato bueno por uno erróneo, hasta obtener una buena idea de lo
que sucede con la estimación. Es de mencionar que el dato que se
escoja para ser erróneo en cada estimación, será cualquiera dentro
del conjunto total de mediciones dado inicialmente, ya que en la
operación de un sistema de potencia no se puede predecir cual es
el valor que va a cambiar o cual es el aparato que nos va a dar
una medición errónea.
Para visualizar mejor los resultados obtenidos, se tabulan a contj_
nuación las estimaciones realizadas (Ver tabla en la siguiente pá_
gina).
ANÁLISIS DE LOS RESULTADOS
En primera instancia se corre el- programa de Estimación con 60 me_
diciones ideales para tomar como base de la prueba a esa solución.
Los resultados como se pueden apreciar son muy buenos..
Desde la segunda estimación en adelante se empiezan a introducir -
perturbaciones como se enunció anteriormente, y es así como se pue;
de notar que desde esa prueba hasta la estimación No. 6 no ha habj_
do problemas, es decir, todo funciona corno se esperaba.-
En la estimación No. 7 empieza a encontrar cambios. Esto se debe a
que el error introducido pertenece a una medición de voltaje en una
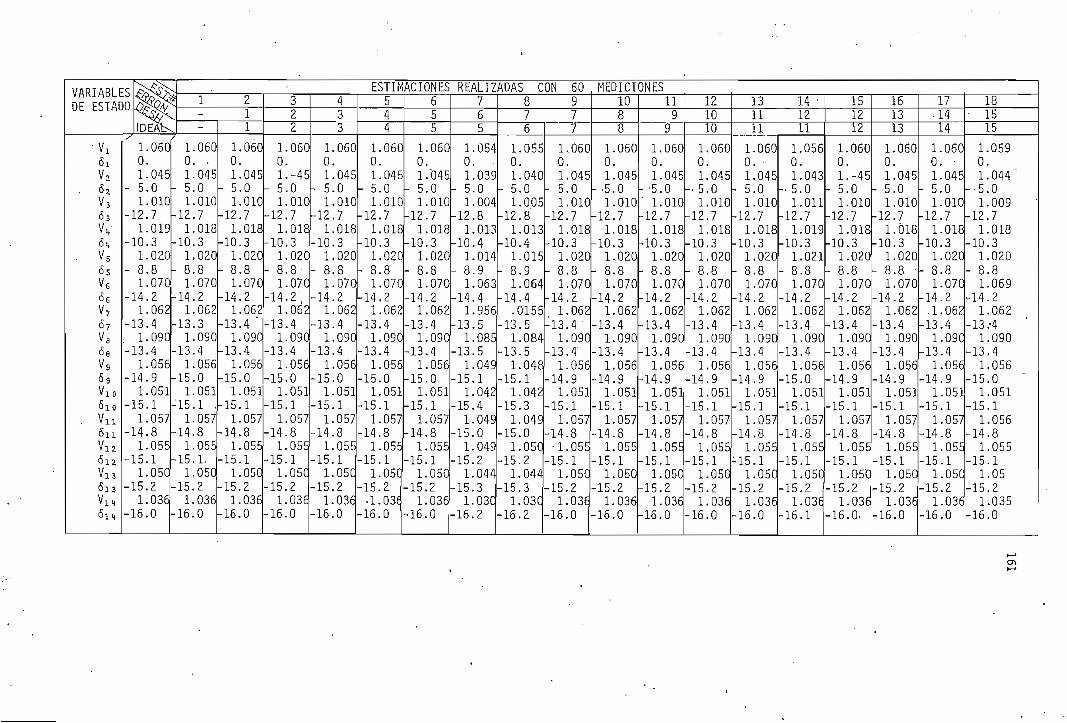
VARI
ABLE
SDE
ES
TADO
y•V
i61 V-
».
62 V3
03 V-- 6*
. V
5
65 Ve 66 V7
¿7 V8
68
. V
9
69 Vio
610
. V
n61
1V
ía61
2V
i 36l 3
Vi,
$m
-
^3S&
IDEA
Í^
ESTI
MA
CIO
NES
RE
ALIZ
ADAS
CO
N 60
M
EDIC
ION
ESS
1•- y
1.06
00. 1.
045
5.0
1.01
0-1
2.7
1.01
9-1
0.3
-1.
020
8.8 1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
4.9
1.05
1-1
5.1
1.05
7-1
4.8 1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
1.06
00.
-1.
045
- 5.
01.
010
-12.
71.
018
-10.
3' 1
.02
0-
8.8
1.07
0-1
4.2
1.06
2-1
3.3
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
.1.
050
-15.
21.
036
-16.
0
2 1 1
1.06
0'
0. 1.04
5-
5.0
1.01
0-1
2.7
1.01
8-1
0.3
1.02
0-
8.8
1.07
0-1
4.2
1.06
2-1
3.4
"1.
090
-13.
41.
056
-15.
01.
051
-15.
11.
057
-14.
81.
055
-15.
11.
050
-15
.2 1.03
6-1
6.0
3 2 2
1.06
00
. 1.-
45
- 5
.01.
010
-12.
71.
018
-10.
31.
020
- 8
.8-
1.07
0-1
4. 2 ;
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05C
-15.
21.
036
-16.
0
4 3 3
1.06
00
. 1.04
5-
5.0
1.01
0-1
2.7
1.01
8-1
0.3
1.02
0-
8.8
1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.1
1.05
7-1
4.8 1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
5 4 4
1.06
00. 1.
045
- 5.
01.
010
-12.
71.
018
-10.
31.
020
- 8.
81.
070
-14.
21.
062
-13.
41.
090
-13.
41.
056
-15.
01.
051
-15.
11.
057
-14
.8 1.05
5-1
5.1
1.05
C-1
5.2
.1.0
3Í-1
6.0
6 5 5
1.06
00. 1/
045
- 5.
01.
010
-12.
7.
1.01
8-1
0.3
1.02
0-
8.8 1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
7 6 5
1.05
40.
•1.
039
- 5.
01.
004
-12.
81.
013
-10.
41.
014
- 8
.91.
063
-14.
41.
956
-13.
51.
085
-13.
51.
049
-15.
11.
042
-15.
41.
049
-15.
01.
049
-15.
21.
044
-15.
31.
03C
-16
.2
8 7 6
1.05
50. 1.
040
- 5
.01.
005
-12.
81.
013
-10,
41.
015
- 8
.91.
064
-14.
4,0
155
-13.
51.
084
-13.
51.
048
-15.
11.
042
-15.
31.
049
-15.
01.
05C
-15
.2 1.04
4-1
5.3
1.03
C-1
6.2
9 7 7
1.06
00.
.1.
045
- 5.
01.
010
-12.
71.
018
-10.
31.
020
- 8.
81.
070
-14.
21.
062
-13
.4'
1.09
0-1
3.4'
1.05
6-1
4.9
1.05
1-1
5.1
1.05
7-1
4.8
•1.0
55-1
5.1
1.05
C-1
5.2
1.0
36
-16.
0
10 8 8
1.06
00. 1.
045
- -5
.01.
010
-12.
71.
018
-10.
31.
020
- 8.
8 .
1.07
0-1
4.2
1.06
2-1
3.4
'1.0
90
-13.
41.
056
-14.
91.
051
-15.
11.
057
-14.
81.
055
-15.
11.
050
-15.
21.
036
-16.
0
11 9 9
1.06
00
. 1.04
5-•
5.0
' 1.
010
-12.
71.
018
-10.
31.
020
- 8.
81.
070
-14.
21.
062
-13.
41.
090
-13.
41.
056
-14.
91.
051
-15.
11.
057
-14.
81.
05E
-15.
11.
05C
-15.
21.
036
-16.
0
12 10 10 1.06
00. 1.
045
-5.0 1.01
0-1
2.7
1.01
8-1
0.3
1.02
0-
8.8
1.07
0-1
4.2
1.06
2-1
3.4
1.09
0-1
3.4
1.05
6-1
4.9
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
13 11 11 1.06
00.
•1.
045
- 5.
01.
010
-12.
71.
018
-10.
31.
020
- 8.
81.
070
-14.
21.
062
-13.
41.
090
-13.
41.
056
-14
.9 1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
0-1
5.2
1.03
6-1
6.0
14 '
12 11 1.05
60
. 1.04
3-
5.0 1.01
1-1
2.7
1.01
9-1
0.3
1.02
1-
8.8
1.07
0-1
4.2 1.06
2-1
3.4
1.09
0-1
3.4 1.05
6-1
5.0
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
0-1
5.2
1.03
6-1
6.1
15 12 12
1.06
00
. 1.-
45
- 5.
01.
010
-12.
71.
018
-10.
31.
020
- 8
.81.
070
-14.
21.
062
-13
.4 1.09
0-1
3.4
1.05
6-1
4.9
1.05
1-1
5.1
1.05
7-1
4.8 1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
.
16 13 13 1.06
00
. 1.04
5-
-5.0
1.01
0-1
2.7 1.01
8-1
0.3
1,02
0-
8.8
•1.
070
-14.
21.
062
-13.
41.
090
-13.
41.
056
-14
.9 1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
17 •14 14 1.06
00.
-1.
045
- 5
.01.
010
-12.
71.
018
-10.
31.
020
- 8.
81.
070
-14.
2.1
.062
-13.
41.
09C
-13.
41.
056
-14
.9 1.05
1-1
5.1
1.05
7-1
4.8
1.05
6-1
5.1
1.05
C-1
5.2
1.03
6-1
6.0
18•
15 15 1.05
90
. 1.0
44
'-•
5.0 1.00
9-1
2.7
1.01
8-1
0.3
1.02
0-
8.8 1.06
9-1
4.2 1.06
2-1
3 .-4
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.1
1.05
6-1
4.8 1.05
5-1
5.1
1.05
-15.
21.
035
-16.
0

162
barra (barra No. 10), sin embargo y a pesar de no haber sido deshe_
chada la medición errónea, vemos que se han deshechado las restan_
tes 5 mediciones. Ahora :biéiv.s-i se compara el valor de esta estima_
ción en esa barra con la dada en la primera estimación se nota que
aún as! el estimado se mantiene por los valores cercanos al normal
lo mismo ocurre con los estimados en las demás barras del sistema.
Conclusión.- El error de una medición no ha sido 'exageradamente -
grande, y el valor de la desviación standard es tal
que hace que se considere a la medición como aceptable.
Asi, se llega a la estimación No. .8. En ella se ha aumentado a -
otra medición errónea la misma que también ha sido deshechada, pe-1
ro que por la variación de la estimación anterior los resultados -
se mantienen en ese punto.
La estimación No. 9 se ha realizado aumentando el rango del error
de la medición de voltaje en la barra 10 (Estimación No. 7). En es_
tos resultados se nota que ahora si se ha deshechado a la medición
V1Qj y los estimados vuelven a ser como al principio, es decir, muy
buenos.
Las estimaciones desde la décima hasta la No. 13 siguen siendo
males, es decir, cada vez que se aumenta un. error en las medicio-
nes, este es detectado como erróneo y es eliminado de la estima-
ción.
En la estimación No. 14 se ha aumentado otro valor erróneo y es

163
aquí donde aparece el problema. iYa no puede ser errónea cualquier
medición! Como se puede apreciar, los estimados varían. Es dec.ir ,
se eliminan datos correctos y en este caso un valor erróneo es con_
siderado como bueno.
Ahora, si se cambia el valor erróneo anterior y en su lugar se pone
a otro valor menos importante como erróneo y se estima nuevamente,
se ve que en efecto se vuelve a la condición inicial, pero en ade-
lante ya se tienen otros problemas como son: La pérdida de exacti-
tud en los estimados, la pérdida de precisión en la identificación
del valor erróneo y consecuentemente el desequilibrio; porque el es_
timador se vuelve muy susceptible a los cambios que se realizan y
ya no se sabría cuando estima bien o cuando está todo mal.
CASO 3. DETERMINACIÓN DE LA MÍNIMA'REDUNDANCIA NECESARIA PARA OBTE
NER UNA BUENA ESTIMACIÓN, CONSIDERANDO PARA EL EFECTO LOS
CRITERIOS DADOS DE OBSERVABILIDAD DE REDES
Para éste propósito se considerará que como mínimo pueden existir 3
errores de medición en nuestro sistema.
Así, se empezará la prueba con 32 mediciones' ideales siguiendo los
criterios de observabilidad» luego se irán cambiando a las 3 •medi-
ciones de una en una para ver como se distorsiona la información, -
por último se aumentará el numero de mediciones de una en una, has_
ta obtener una idea clara del punto en donde el- algoritmo de Esti-
mación de Estado surte--efecto.
Los resultados de las estimaciones se tabulan a continuación:

VARI
ABLE
S
DE ESTADO
VALO
RES
'VE
RDAD
EROS
ESTI
MACI
ONES
RE
ALIZ
ADAS
CO
N K
MEDI
CION
ES32
3232
32
33734
' 35
-36
- 37
38
39
33
33
33
5 3
5 3
40
1
41 1
4243
4445
Vi íi 64 Vs 65 Vs S6 V7 67 V8
68
'V
9
69 Vio
<Si o
Vu 611 V,z
612
V1
3
- 51.
060
0° 1.04
50°
1.01
0-1
2.7
°1.
019
-10
.3°
1.0
20
--8
.8°
1.07
0-1
4.. 2
°1.
062
-13.
4°1.
090
-13.
4 .
1.05
6'-1
4.9°
1.05
1-1
5.1
1.05
7-1
4.8
1.05
5-1
5.1
1.05
0-1
5.2
1.03
6-1
6.0
- 51.
060
0° 1.04
50°
1.01
012
.7°
1.01
910
.3o-
1.02
18
.8°
1.06
914
.2°
1,06
313
.4°
1.09
113
.4 1.05
715
.01.
052
15.1 1.05
814
.8 1.05
215
.0 1.06
214
.0 1.04
714
.9
1.06
20° 1.
045
• 4
.9°
1.01
0-1
2.8°
1.00
9-1
0.2°
1.02
4-
8.8
°1.
059
-14.
2o1.
053
-13.
3°1.
081
-13,
31-
.047
•14.
9°1.
042-
-15.
11.
048
-14.
81.
042
-15.
01.
052
•14.
01.
037
-14.
9
1.05
60° 1.
045
- 5
.r°
1.01
0-1
2.8°
1.01
8--
10.4
°1.
032
- 9
.1°
1.06
7-1
4.4°
1.06
2-1
3.4°
1.09
0-1
3.4
1.05
6-1
5.0
1.05
1-1
5.2
1.05
6-1
5.0
1.04
9-1
5.2
1.05
8-1
4.3
1.04
0-1
5.6
- 1-
.056
•0° 1.04
5-
5.1°
1.01
0-1
2.7°
1.01
8-1
0.3°
1.03
2-
9,0
°1.
067
-14.
4°1.
062
-13.
4°1.
090
-13.
41.
056
-15.
01.
051
-15.
21.
056
-15.
01.
049
-15.
21.
058
-14.
31.
040
-15.
6
1.05
60° 1.
045
- 5.
1°i!o
io-1
2.7°
1.01
8-1
0.3°
1.03
2-
9.0
°1,
070
-14.
4°1.
062
-13.
41.
090
-13.
51.
056
-15.
01.
051
-15.
21.
057
-14.
91.
056
-15.
21.
051
-15.
31.
036
-16.
2
NO
ESTI
MA
1.0
60
0° 1.04
6-
5.0
°1.
009
-12.
6°1.
017
-10.
2°1.
031
- 8
.9°
1,06
9-1
4.3°
1.06
1-1
3.3
1.08
9-1
3.3
1.05
5-1
4.9
-1.
050
-15.
11.
055
-14.
81.
054
-15.
11.
049
-15.
2.1
.034
-16.
1
.1.0
600° 1.
045
- 5
.0°
1.01
0-1
2.7°
1.01
8-1
0.3°
1.02
0-
8.8
°1.
070
*14.
2°1.
062
-13.
41.
090
-13.
41.
056
-15.
01.
051
-15.
11.
057
-14.
81.
055
-15.
11.
050
-15.
21.
036
-16.
0
' 165
Él propósito de esta prueba consiste en encontrar la mínima redun-
dancia posible en caso de tener como mínimo 3 mediciones erróneas,
así al empezar con el análisis se tiene a la primera estimación.En
ésta se consigue encontrar los mejores estimados de las variables
de estado utilizando los criterios de observabilidad de redes.
En la segunda estimación se ha introducido una medición errónea, p£
ro como se puede ver, el estimador no está en capacidad de detec_
tar todavía ningún error por lo que notamos un cierto alejamiento
de los valores estimados, sobre todo en la parte donde se encuen-
tra la medición errónea.
Observación.- No se puede decir que el valor erróneo es pequeño y
por tanto no ha sido detectado, ya que se ha escogido el ;caso en
que a la medición se le ha cambiado su signo simulando la instala^
clon errada del equipo de medida, en cuyo caso el dato es un valor
erróneo perfecto.
En la tercera estimación se observa que los resultados son de me-
nor calidad que los anteriores por la inclusión de otro valor erró_
neo, es decir que en este punto al tener mayor cantidad de datos
erróneos lo que se consigue es distorsionar más y más la-estimación
lo mismo ocurre en la siguiente estimación, con la diferencia de
que el algoritmo ya no da ningún resultado.
Si se mantienen a estos 3 errores en lo sucesivo y ahora se siguen
aumentando el número de mediciones, se nota que hay una zona en la

166
tabla que no tiene resultados, esto se debe a que no hay la suficien_
te redundancia y por tanto el algoritmo de:estimación no surte efec_
to.
A partir de la estimación con 40 mediciones se puede ver que nueva -
mente el estimador empieza a dar resultados, pero todavía no se pue-
de decir que éstos son válidos, puesto que están un tanto lejanos a
los reales, y lo'que es peor, de las 3 mediciones erróneas existen -
tes solamente una ha sido detectada como tal, lo mismo ocurre con 41
mediciones. .
Al incrementar a 42 el número'de mediciones se vé que algunos valo-
res se van acercando a los reales, pero todavía no se.detectan los 3
datos erróneos. En la estimación de 43 mediciones se detectan más -
mediciones que las normales, por lo tanto no estima, en la estima-
ción de 44 mediciones se obtienen resultados pero todavía no se de-
tectan las 3 mediciones erróneas.
Hasta que por ultimo se llega a la estimación con 45 mediciones; en
este punto el algoritmo de estimación ya ha tomado nuevamente el con_
trol-y empieza a funcionar correctamente, es decir que se han detec-
tado todos los valores erróneos y se han obtenido nuevamente los me_
jores estimados.
Conclusión.- De lo demostrado en' esta prueba y por lo enunciado en
el ejemplo anterior, se puede decir que: a partirde^una
redundancia de 0.60 aproximadamente el estimador está en capacidad

167
de trabajar en óptimas condiciones, sobre todo cuando el sistema de
medición es de muy buena calidad y su sistema de comunicación es
también muy confiable. .
Resultados de las estimaciones más importantes de esta prueba, se
muestran a continuación.

RC
PO
RT
C
DC
L C
AL
CU
LO
D
C
F.L
UJO
S
DC
P
tlT
CN
CIA
P
AR
A C
L S
I'S
TC
MA
C
W
CS
7U
01
0
BA
RR
A *¿
ON
íl1
C
VO
LT
S
AN
Glj
LQ
H
U
"V4
R
tí'J
M
VA
R
MV
AF
1
S/C
1
l.ü
b'J
0
.0
23
2.3
8
-1
6.8
9
'0
.0
0
0.0
0'
2
S/r
2
1
. J
45
-5
.0
40
.00
42
.39
21
. '7
0
1Z
.7C
•
O
. .
..
o : '
3
S/f
! 3
1.1
10
-1?
.7
0.0
0
?3
.39
9
4.2
0
19
.00
O
- .
4 S
/C
4
1.2
19
'
-1
0.3
-G
.OO
0
.00
'
47
.80
-3
.90
o •
5
*/£
5
1.0
20
-8
.fi
-0
.00
-n
.OO
•
7.
6 O
' 1
.60
O
6
S/r
6
1
.37
0
-1
4.2
-U
. 0
0
12
.24
1
1.2
0
'7.5
0
7
S/C
7
1.0
2
-1
3.4
U
. 0
0 0
.00
.0.0
0
0.0
0"
O
B
S/C
3
l.r°0
-A
i. 4
.'
-Ü
.OQ
1
7.3
5
0.0
0
0.0
0
9 S
/r
9
1.0
'ífi
-H
.i
-0
.00
-0
.00
.. 2
9.5
0
1 6 .
6 0
O1
0
* /
C
1 0
l.V
il
-1
5,1
-0
.00
0
.00
9.0
0
5 . fl
0
Q1
1
.S/C
1
1
1.C
57
-1
4.
fl
0.0
0
. O
.üO
"
'3.5
0
Ufl
Q
O1
2
S/r
1
2
l.J
Sb
-15
.1
0.0
0
0.0
0
6.1
0
1.ÍO
O1
3
S/C
1
3
1.Í
50
-Ib
. 2
0
.00
0.0
0
13
. S
O
5.8
0
O
14
S/C
1
4
I.}1.'.
-1
6.0
-f.
ff'J
O
.QO
14
. 9 C
. 5 .
3 C
fl
:AC
-X
A LA
í Q
AB
RA 2 5 t
. 4 5
.
4 3 5 '
7 9 1 4 6 5 11
12
13 4 a 9 7
' 4 7
10
14 9
11 b
10 6
13
.
61
21
4
13
HOMB
RE:
s/c
s/c s/c s/c
s/c
s/c
s/c s/c s/c
s/c
s/r
s/c
s/c
s/c
s/r
s/r.
s/c
s/c
s/c
s/c
s/r
s/c
s/c
s/c
s/c
s/c s/c
s/c
s/c
s/c
s/c
s/c
s/c
s/c s/r
s/c
s/c
s/c
s/i:
s/c
5 1 3 4 5 4 2 3 5 7 9 'l .2 4 f, 51
1 12
13 fl 9 7 4 7
10
14 9
1 1 6
10 6
13 b
12
14 9
13
MU
K
VA
k T
AP
75
. b
5
-Ib
2.5
47
3.1
9
4 1
.01
-7
0.
«Y
-2
3.3
3
25
.70
•-G
l. 2
e2
Ü.0
91
6.
Ü9
-7
2.
7 9
-4
0.6
1fe
l .7
44
4 .
C b
-4
4.
U6
7.3
4
7.7
B
17
.74
-2
3.
U 9
o.oo
•
26
.09
-Q.O
O
5.1
-49
.H4
-b
.23
-3.7
7
-7.2
V'3
.7
9
-7.7
11
.61
-1
7. .
53
-1 .6
05
.6
Í
-9.3
2-5
.58
-2L
-.3
9.
3.5
0'
27
.65
-2.:
- 9'J
.76
l.h
H
2.5
1
¿.¿
9
-5.4
2
-t.4
2
1 .C
??
-u
. 3
2
1 .0
32
-i
.63
-Ib
. ¿
71 ;
. í' 2
1 .
C 7
3
- f
. 4 U
3.4
7
- £
.19
' '
7.1
7
11
.11
5.6
0
U. 3
5
1.6
3
-5
.00
4 . A
1¿
.67
-'i .2
7-1
.53
-J.3
S,
1.5
6
-2.3
40
.74
-fa
.7b
-5
.74
-1.5
P
r o o ti © O O o C o C o u O ^
W
CTi
o
:•!
Y
DC
'-'t
-'.-
'A
Tí U
L
i?f!
'.¿
fl
78
.4^
25
^.0
0
73
,50

T E O R Í A D E E S T I M A C I Ó N170
EN ITSTA PARTE SIMULAREMOS EL FUNCIONAMIENTO DE LATEORÍA DE ESTIMACIÓN EN UN CE.'vTRO DE CONTROL» LAMIS'-!A OUE CONSISTE EN PROCESAR UN CONJUNTO DE ME-DIClOlvES REDUNDANTES (TOMADAS EN TIEMPO REAL) DELSISTEMA» ELIMINANDO LAS MEDICIONES ERRÓNEAS HASTAOBTEHER EL MEJOR ESTIMADO DE LAS VARIABLES DE ES-TADO DEL S.E.P.
DE VALORES MEDIDOS DEL SISTEMA P A R A E V A L U A R
M E D I C . *
4567aQ
101112131115Ib17IB192G2122?324?5262728293031
EL ESTADO DEL MISMO MEDÍAME
ESTIMACIÓN DE ESTADO.
TIPO DE 'MEDIC.POTENCIA ACTIVA EN LA B A R R APOTENCIA A C T I V A FiV LA B A R R AFLUJO DE POTEN. REACTIVA ENPOTEN. REACTIVA EN LA B A R R AFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA EN' LA B A R R APOTENCIA A C T I V A EU LA B A R R APOTENCIA ACTIVA EN LA R A R R AFLUJO PE POTFN. R E A C T I V A ENPOTEN- R E A C T I V A E*.1' LA B A R R AFLUJO DE POTEN. REACTI-VA ENFLUJO DF POTEN1. R E A C T I V A ENFLUJO DF. POTENCIA ACTIVA ENFLUUO DE POTENCIA ACTIVA E-NFLUJO' DE POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA -wFLUJO DF POTEN'. R E A C T I V A ENFLUJO DE POTEN- REACTIVA EN?=LUJO DE POTEN. R E A C T I V A ENFLUJO PE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIV-A ENFLUJO DF POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO ÜE POTEN. REACTIVA ENFLUJO DE POTEN'. REACTIVA ENFLUJO DE POTEN. R E A C T I V A ENPOTEN. R E A C T I V A FN LA P A R R A
FLUJO DE POTEN. R E A C T I V A ENFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA EN LA B A R R A
7S9 -a
3 -1
1 399 -o
13 -15 -14 -u -b -5 -6 -
10 -4 -h -4 -6 -
11 -•5 .-7 -2 -123
14 -2 •-'
11
EL USO
10
4
1¿
1 46
1 3267
12a
72Q
5 'fe4 .s3.
131
DE LA
VALOR0.C.0.-0.-0.2.-0.-0.0.G.D.-0.-0.-a.0 *-0.0.
-0 •-C .-0.-0.-0.-0.-0.-0.G.-0.1 .-0.-1-.-0.
TEORÍA DE
(P.U.)0000oooo .0131166Ü233332381350295003&72569G1É>90675'05585^64^0628090249042709424061U 03 244060729153716910356016C0100015B52540350
STANDARD-1.001 * Oü1.001 . O O1.001 .301 .001.031 .001.00-i .au1 . 3 j1 .00i . G ai .001.3U1 ,3Ú "1 .00i .:c1 .001 -OU1 .OD1 «O ü1. JOi .ac1 .001 .001 .00l'.OÍJ1.00l.üü
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ES 0 . 0 0 6
M E J O R E S E S T I M A D O S
B A R R A3APRA 'B A R R AHAS FÍAB A R R AB A R R Ab A P R AB ARRA .B'A^RAB A í V R A lBARRA!R A R R A 1B A f t R A l
12345678o
G123
8A3RAÍ4
rEr
EEE•EEEr
EEEE'
=
===='== •===.==:=
' =:
11
1
1
1
1
1
1
1
1
1
1
1
1
.060
.045• CIO.018.020.070.062.090.056.051.C5&.050.G51.036
DELTADELTADELTA:-ELTADELTADELTADELTACELTADELTADELTADELTADELTADFLTADELTA
= 0= -5= -12= -10= -8= -14= -13= -13= -14= -15=-14= -15=-15"=-16
.0
.0
.7
.3
.8
.2
.4
.4
.9
.1
.7
.1
. 2
.0
NUH . 7
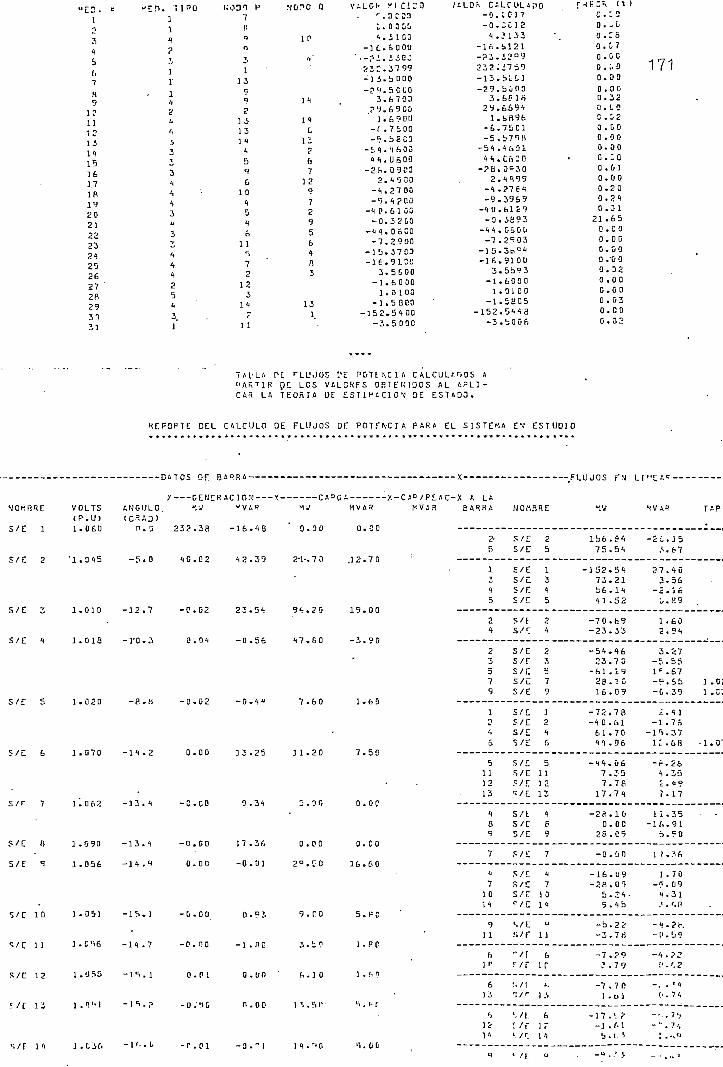
»Cn. ^ "Cn. T I P O 1:001 P1 1 72 1 í!
-i íf 9
0
b 3 3
7' 3' 13C
H 19 /, 9
1? 2 ?
12 '* 13 .13 3 3 1
15 3 ü
3 6 3 q
17 4 618 4 301 9 4 4
20 3 $TI ¡i • 4¿1
22 3 ' 623 3 11?4 4 125 4 7
?7 ' 2 12
2fl 5 329 4 143 n 3 f31 3' ' U
ÑOPO o v A L C í - "' ciro v¿r. 3 C23",.0000
]p 4 . J 1 C 3-1 £.6 000
7'"l379«-1 - i . b O O O
- ? S . 5 C C O11 . 3 - 6 7 0 D
? 9 . 6 9 0 014 1.69 DO
C - Í . 7 5 0 0¡Í - ' r .bSCS-? - 5 4 . 4 6 0 0(i ** 4 . (Jó 007 - 2 8 . 0 9 C D
12 2 . 4 5 3 09 -4.27007 -9. 4 ? 002 - 4 P . 6 1 0 59 -0 .32005 -t 4. O Ó C O& -7 .29004 -15.3703ñ -3É-910C3 3 . 5 B O O
-1.60001 . 0 3 0 0
13 -1.5300) -152.5400
- 3 . 5 0 0 C
LOn C iLC i - t LAPO-0. l 03 7-o. ;c i2
4.3133-1 6.61 21-? 3 . ¿2 a9332.1759
-13. bilí- 2 9 . b ú 0 3
3.6P1B29.669*
I.£)ft96-D.7ÜC1-5.L>79H
-54 .46314 4 . C ti - 0
-?fl. 0=302 . 4 = 4 9 9
- 4 . ? 7 £ 4-9 .3969
-4 0.6129-O.ÍÜ93
-7. 2* 03-35-oDt= í '-16.910U
3.5b93-1.6000
1.01 CO-1.5HC5
-152 .0448-3.bOü6
f ^ R C r v í t )
C . - 00. -0o . c sO . t 7
O . G O
O . u D
0 . 0 0
0 . 0 00 . 3 20 . (j C0.12
O . C O
0 . 0 0
0 . 0 0
o . - oO . & l
. 0 . 0 00 . 2 0
0 . 2 4
0 . 3 1
21.65O . C O .0 . 0 0
0 .000 .'00
0 . 3 2
0 . 0 0
0 . 0 0
0.03
O . C O
171
•
•
TM.-LÍ. PE FLUJOS :*r P & T E & C I A CALCULADOS ¿" A R T j p pr LCS V A L O R f S O R T E W I D O S AL APLI-
M O M R R E
S/E 1
S/E 2
3
S/E 4
S/E 5
S /L 6
s/r 7
c / r n;> / 1. ti
c / r Qb / 1. T
S/E i n
s / E 1 ]
S / L" 12
5 /C 13
CAR LA
HEPOPTE: DEL CALCULO
,
y G E N E R A C I Ó NVOLTS ÁNGULO. "t'J U V A R(P.U) IGRA;})1.060 f . O 2 3 ? « 3 8 — 16.48
1.045 — 5 .0 4 0 . 0 2 4 2 . 3 9
1.018 — 1*0.3 0 . 0 4 — 0 .56
1.020 — o • H — 0 » 0 2 *• 0 » 4 4
1 0 7 0 — 14.2 0 . 0 0 ] 3 • 2 5
1.0
3.09" — 3 3 . 4 — 0 .00 i 7 » ,j 6
1.0 6 -14.
1 • 0 "í 1 — 3* i .3 — 0.00 0 . *í "*i
' S5 .1
i n i. ¡ — i "i . P — n ' n G n.np
T E O R Í A DE E S T l C t C I O N DE ESTADO.
DE FLUJOS DT P O T F N C I A P A R A EL
y C A » C ¿ - X - C í ^ / P E S C - X"l'J H V A ^ K V A R
0 . - 3 0 O . O C —
2*1*. 7 0 .12*70 —
¿ T e n _ i Q f i —*t ( • O u — • » U —
"
~t (, n ~\ TI ~( . b u j - .cu
11.20 7 . 5 0 —
^ 0 íí O O P —
0.00 O . C O —
9 . f O S.^C ' —
i. i- n i o r _.1 . - .' J • f i' —
fi ] 0 1 . *-. " —
SISTEMA EV ESTUDIO
A ' L AB A R R A NOMBRE
2- S/E 25 S/ET 5
1 Í7/E 1
3 S/L 34 S/E 4
5 S/C 5
2 5 / f 24 S/E • 4
2 S/E 23 s/r 35 S/E 57 S/E 79 S/E 9
1 S/E 12 S/E 24 S/E 4& S/E 6
5 S /E 5U S/E 1112 pyr 1213 -s/E 13
4 S/E. 4e S /E B9 S /£ 9
7 S /E 7
4 S/L 47 S/C 7
10 s/r 1014 c / E 1 4
9 './U «31 s/r 11
6 "/f 6i f r /r i r
6 :./i f.13 ':/r 13
6 S / (. 6]¿ :/r ir1 *• *. / r l/i
M,U
Ib6.&4
75 .54
-152.5473.21b6.1443 .52
-70. fc9-23.33
- 5 4 . 4 623.70
-M .1928 .3 016.09
-72.78. -40.61
61 .7041 .06
-44 . 067.Í5
7.76
17 .74
-2fi.lí>O . O C
28. C9
- O . í f O
-1&.U9- 2 H . Q 5
5 . 2 4 -5 . 4b
-b.22-3.78
-7.?9? - 7 9
-7 .70l.bl
- 1 7 . * ?-1 .f.l
ü . (. \ T ''E £c — — —
VV A^
-2:. 3 5A. f r7
27 .403.56
-í . 3 6L .H9
1.60
2. 94
3. '¿7-I-..551 c . 67-9. &b-C.39
¿.41
-3 .76-lf».37K .69
-r.264.35
^ . 4 9
7.17
11.35-1 f». 91
ñ.90
1 ? . > 6
1.70
-r^.094 . 3 1
•*•'•"
- •) . ? r.-E'.ij9
-4.í>2í'.f.?
-..-"•( - . 7 4
-..7V- " . 7 4: .-íti
T A P,
i .c;i .02
•1.07
.
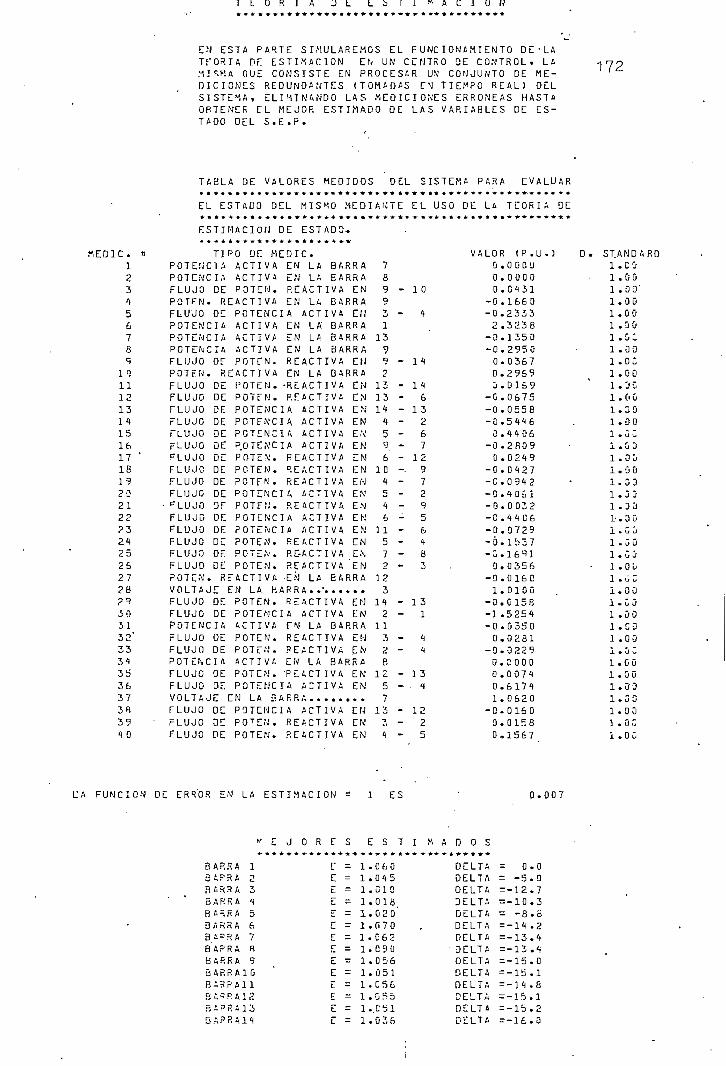
T E O R Í A D C E S T I M A C I Ó N
EN E S T A P A R T E SIMULAREMOS EL FUNCIONAMIENTO D E - L AT F O R I A DF. E S T I M A C I Ó N EN UN C E N T R O DE C O N T R O L , . LAMISMA QUE C O N S I S T E EN P R O C E S A R UN CONJUNTO DE ME-D I C I O N E S REDUNDANTES ( T O M A D A S ÜV TIEMPO R E A L ) DELS I S T E M A , E L I M I N A N D O L A S MEDICIONES E R R Ó N E A S H A S T AOBTENER EL MEJOR E S T I M A D O DE LAS V A R I A B L E S DE ES-T A D O DEL S.E.P.
172
TABLA DE VALORES MEDIDOS DEL SISTEMA PARA EVALUAR
MEDIC.i234567a9
101112131415Ib17IB3 9202122?324252S2728?9303132"33343S36373R39
EL E STADO DEL MISMO MEDIAN!'E EL USO DE LA TEORÍA DE
ESTIMACIÓN DE ESTADO.
TIPO DE MEDIC. .POTENCIAPOTENCIAFLUJO DE
ACTIVA EN LA B A R R AACTIVA E,"J LA B A R R APOTEN. REACTIVA EN
POTFN. REACTIVA EN LA B A R R AFLUJO DEPOTENCIAPOTENCIAPOTENCIAFLUJO Df
POTENCIA A C T I V A EfJA C T I V A EN LA BARRAACTIVA EN LA B A R R AACTIVA EN LA B A R R APOTCN. REACTIVA EN
789Q
31
13?9
- 1 0
- .4
- 14POTF.fJ. REACTIVA EN LA BARRA. ?FLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO 9EFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO DE^LUJO DFFLUJO DEFLUJO DEFLUJO DEFLUJO DFFLUJO DEPOTEN. RVOLTAJEFLUJO DEFLUJO DEPOTENCIAFLUJO DEFLUJO DEPOTENCIAFLUJO DEFLUJO OF.VOLTAJEFLUJO DEFLUJO DEFLUJO DE
POTEN. -REACTIVA ENPOTFN. REACTIVA ENPOTENCIA ACTIVA ENPOTFN'CIA ACTIVA ENPOTENCIA ACTIVA EWPOTENCIA ACTIVA ENPOTEN1. REACTIVA ENPOTEN. REACTIVA ENPCTFN. R E A C T I V A ENPOTENCIA ACTIVA ENPOTFN. REACTIVA ENPOTENCIA ACTIVA ENPOTENCIA ACTIVA ENPOTEN. R E A C T I V A ENPOTEN. RE-ACTIVA EXPOTEN. REACTIVA 'EN
FACT1VA -EN LA B A R R A
POTEN. REACTIVA ENPOTENCIA A C T I V A ENACTIVA FN LA B A R R APOTEN. REACTIVA ENPOTEN. REACTIVA E MA C T I V A EN LA B A R R APOTEN. - R E A C T I V A ENPOTENCIA ACTIVA EN
POTENCIA ACTIVA ENPOTEN. REACTIVA ENPOTEN. R E A C T I V A EN
1313144596
1045
46
11c:
72
12i
142
1 132e
1257
1 3i
4
- 14- 6- 1 3- 2- 6- 7- 12-. 9- 7_ 2
9
- . 5e.
- 4- : B- 3
- 1 3- 1
4- 4
- 13- . t
- 12- 2- 5
VALOR (P.U-)0Q0
-0-02-0-0D0j
-0-0-0G
-00
-0-C-G-0-C-0-ó-c0
-01
-0-1-0Q
-Q0001
-000
. 0 D 0 'J
.0000
.0431
.1660
.2333
.3238
.1350
.2950
.0367
.2959
.D169
.0675
.0558
.5446
.4406-2R09.0249-0427.0942.4051.0032. 4 4 D 6.0729• Ib57.1691.0356• 0160.0100.0158.5254.0350.0281.0229.0000.0074.6174.0620.0160.0158 .,1567
STANDARDl.CO1.001 .00'l.OG1.001 .DOi.o:i .OQi .o¿i.oo1.3Cl.üú1.301 .001 • ü
i . O 31.001.001-031.331 .Dal-.OÜ1 . G ü1 . o O1 . C J1 .011 .¿C1.001 . ú J
1 .DOl.CO1.001 . u C1 .001.001.001.001.001 . O Ci .00
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN ES 0.007
M E J O R E S T I y. A D o s
BARRA3APRAB A R R AB A R R ABA = RA3A?ín A3 As R AS'APRAB A R R AB A R R A 1BASPA1SA"RA1E A P R ¿ a
12i•j4567R
9D123
SAFRA 14
Er
EEEEr
EEEEEEE
=
====-========
11111111111111
-C60.045.CÍO.018,G20".070.062 -.090.056.051. C56.0 5..Ctvl.036
DELTADELTADELTADELTADELTADELTADELTA
• DELTADELTADELTADELTADELTADELTADELTA
=== -= -== -= -=-= -
= -= -r--~= -
0-51210-814131315151415ib"16.
.0
.0
.7
.3
.8
.2
.4
.4
.0
.1
.8
.1
.2
.0
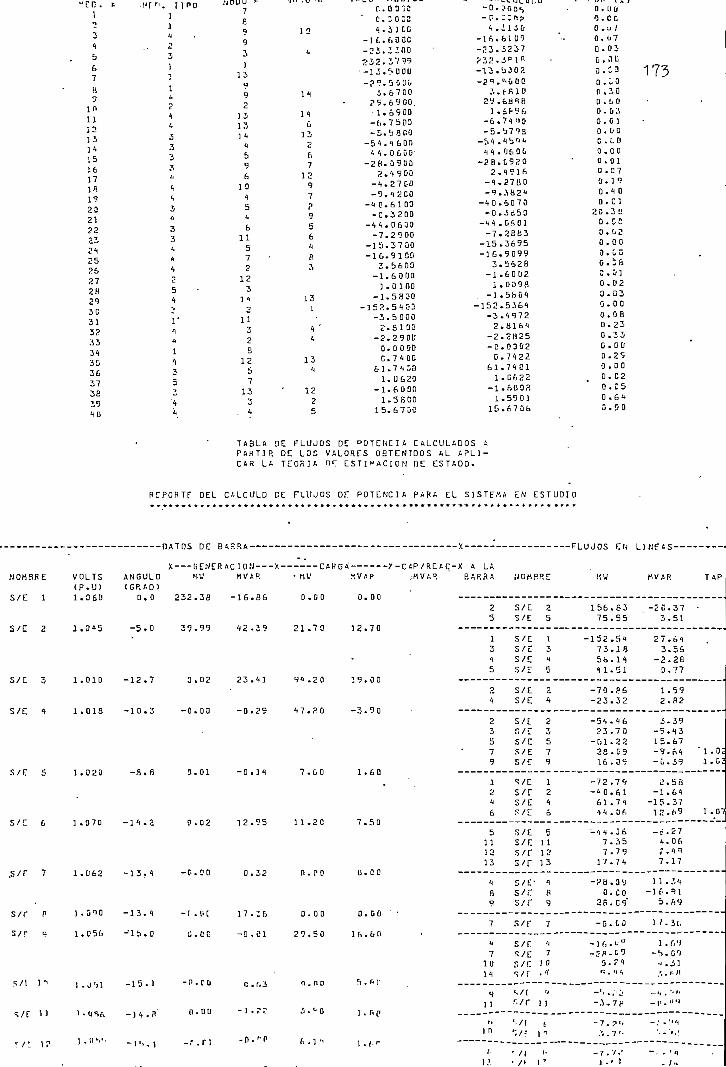
NODO P789931
13u92
1313
. 114596
1045A6
11572
123
1*2
1132S
1257
133
1 3
4
14 '
6132f,7
12
131
13
122
-23.3237
.'.. t A1 Ü
>-íJH (2 i0. t)üO.CCO.u /O.üV0.01
44.-2B.
2,-4.
-40.-O,-44.-1.
-15,-16,
3,-1.1.
. -1-152
-32
-2-OO
611
-11
15
0&0&0920491627BO38246070Jd5C0601.2383.3695.9099.5628.6002.0098.5804.5364.4972.8161.2825
742274210622600fi59016706
0.30o .LOD . & 30.01O.C'Oo . c tiQ.CO0.01O.C70.190.100. Cl20. 3Í!O r u0.020.00O . ú Co.;&0.010.020.030.00o.oa0.230.23G.OQ0.29O .000.02D.C50.64-O.QO
173
TABLA DE FLUJOS DE POTENCIA CALCULADOS APARTIR DE LOS VALORES OBTENIDOS AL APLI-CAR LA TEORÍA nr ESTILACIÓN DE ESTADO.
RfPORTf DEL CALCULO DE FLUJOS DFT POTENCIA PARA EL SISTFKA EN ESTUDIO
NOM3RE
S/E 1
S/E 2
S/E 3
S/E 4
S/E 5
c / r g
<; / F 7..i / r. '
S / r o
*5 / 1 1 "
s / r 5 1
X G E N E R A C I Ó N X CAHC-A" X -C AP / R E A C - X A LAVOLTS ÁNGULO MU M V A R • MI1 M V f l P ;HVA°, E A R ñ A(P.U) ( G R A O ) ;1.360 0 .0 232.38 —16.86 O . C O 0 . 0 0 — — —
25
1.0*5 -5.0 39.99 12.39 21.70 12.701345
1.010 —12.7 0 .02 23.41 9 4 . 2 0 19.00 _ _ _ _ — — - .
24
1.018 -10«3 -0 .00 -0.?9 47 .P -0 -3.90 • — — -___
2. - 3
579
1.320 — S • fl 0.01 — 0 . 1 4 7 . 6 0 1.60
12
46
111213
1.Ü62 — 13 .4 — G . O O 0 .32 0 . [* 0 0 . 0 0
flq
7
1.056 -15.0 ü . O C — 0.01 ? 9 « 5 0 16.60 • — — — -
710i 4
j U "i 1 —15.1 - P - C Ü R. f t í n . C O 5 . B P
9] ]
1-U^E, -14.?. »'l)U " i - ? ? ¿ - • ' - O l . f in
Í10MRP.E
S/ES/E
S /ES / ES/Es/r
S/ES/E
S/LS/L
S/ES/ES/E
•í/E
s/rS/ES/E
S / ES/Es/rs/r
S / E 's/rs/r
s/r
s/rS/ES/Es/r
s / fr./r
25 -
13t5
24
2T
579
1246
5111213
4
P9
7
,7
J 0
— PLU JOS
KW
156.75.
-152.73.56.41.
-70.-23.
-54.23.
-61.28.16.
-72.-** 0 .
61 .4 4 .
-1f .7.7.
17.
-Vtí.0.
2fi.
-0.
- 1 6 --£fl.
5.
EfJ
8355
54
181451
8632
4670220909
796174Oft
J635797 4
a yc oG9"
00
uu
C9? 4
•
L3 NE AS
f^Vj iR TAP
-2C.37 •3.51
27 .043.56
-2.260.77
1.59
2.ñ2
¿.39
-5.f 315.67-9.04 "1 .0 ;-G.39 i.c;
ií.Üñ-1.64
-15.3712.69 1.01
-Í.274 . 0 6e . 4 íí
7.17
1 1 . 31- 1 £• . 9 1
:>.*«
I/. Si.
1 .6 'I
-S.G'í4 . ¿ 1
. 4f *J . /i *, '. , i:H
01 ]
-'•..-n..
- ¿
ÍH
-«, . - •».- [t . " <>
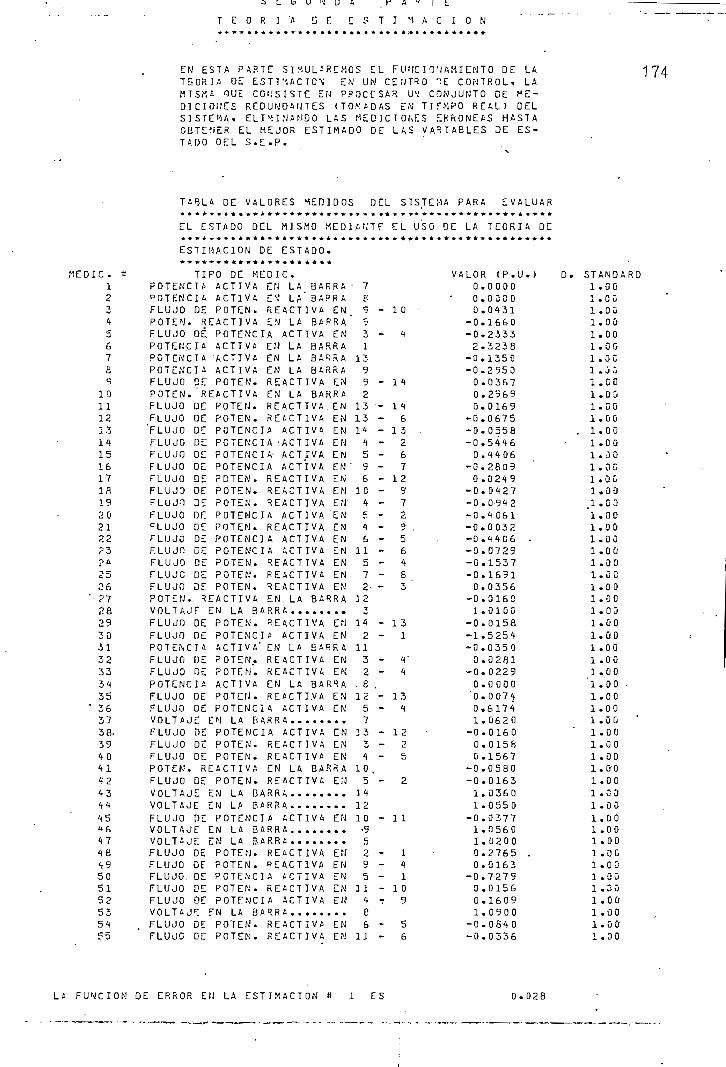
S E G U N D A ' . P A D . T E.
T E O R I "A D E E S T I M A C I Ó N
EN E S T A P A R T E S I M U L A R E M O S EL F Ü¡1C I Q' f AHÍ ENTO DE LAT E O R Í A DE EST7'1ACIC\N UN CEííT^O TE CONTROL* LAMISt fA TUE CCUSIST-E EN P R O C E S A R U\ CONJUNTO DE ^E~OICJOlíES REDUNDANTES ( T O M A D A S EM TIFMPO REAL) DELS I S T E M A , ELIMINANDO L A S M E D I C I O N E S E R R Ó N E A S H A S T AOBTENER EL MEJOR EST IMADO DE LAS V A R I A B L E S DE ES-T A D O DEL S.E.P.
174
D E V A L O R E S M E D I D O S D E L S ISTEMA P A R A E V A L U A R
M E D 1 C ,
67eq
101112i ¡z
14151617IR19SC-SI22P3pa2526272829303132333435363738-39
42434445«647484.9505152535455
EL ESTADO DEL MISMO MEDIANTE EL USO
ESTIMACIÓN DE ESTADO.
TIPO DE MEDIC.POTENCIA ACTIVA EN LA BARRAPOTENCIA ACTIVA E\ LA'3A?RAFLUJO DE POTEN. R E A C T I V A ENPOTEN-. REACTIVA EN LA B A R R A 'FLUJO DÉ POTENCIA ACTIVA ENPOTENCIA ACTIVA EN LA B A R R APOTENCIA 'ACTIVA EN LA B A R R APOTENCIA ACTIVA EN LA B A R R AFLUJO DE POTEN. REACTIVA ENPOTEN. "REACTIVA EN LA BARRAFLUJO DE POTEN. R E A C T I V A . ENFLUJO DE POTEN. REACTIVA EN"FLUJO DE POTENCIA ACTIVA ENFLUJO DE POTENCIA -ACTIVA ENFuUJO DE POTENCIA- ACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA EN^LUjn D" POTEN. REACTIVA EN'FLUJO DE POTENCIA ACTIVA 'ENCLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO GE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA ENFLUJO DF POTEN. REACTIVA ENPOTEN- REACTIVA EN LA BARRA
FLUJO DE POTEN. REACTIVA EMFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA' EN LA BARRAFLUJO DE POTEN. REACTIVA ENFLUJO QE POTEN. REACTIVA ENPOTENCIA ACTIVA EN LA B A R R AFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA EN
FLUJO DE POTENCIA ACTIVA ENFLUJO DL POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA ENPOTEN. REACTIVA EN LA B A R R AFLUJO DE POTEN» REACTIVA EN
FLUJO DE POTENCIA ACTIVA EN
FLUJO DE POTEN. REACTIVA ENFLUJO DE" POTEN. REACTIVA ENFLUJO. DE POTENCIA ¿CTIVA ENFLUJO PE POTEN- R E A C T I V A ENFLUJO DE POTENCIA ACTIVA EN
FLUJO DE POTEN. REACTIVA ENFLUJO DE POTEN. REACTIVA EN
- 7B.
9Q
31
13992
13131*45
' 9&
104c
46
11572
32i
142
1132
. 81257
1334
10 .5
1 41 210.95295
1 14e6
11
DE LA TEORÍA DE
VALOR (P.U.)O.OOQO
- 1 0 :
- 4
- 14
'- 14 ,- &- 13 - .- 2- 6- 7- 12- 9- 7- 2_ o
- 5- 6 '- 4- S- 3 '
- 131
4"4
- 13- 4
- 12- 2._ c.
- 2
- 11
- 1- 4
1- 1 0~ ^
- 5 •- 6
00
-0-02-0-0000
-0-0-00
-00
-0-0-Q-Q-0-0-0-0Q
-01
-0-1-00
-00'o01
-000
-0-011
-01100
-0001
-Q-0
.0200
.0431
.1660
.2333
.3238
.1350
.2950
.0367
.2969
.0169
.0675
.0558
.5446
.4406
.2809
.0249
.0427
.0-942
.4061
.0032
.4406 -
.0729
.1537
.1691
.0356
.016G
.OIGO
.0158
.5254
.0350
.0281
.0229
.0000
.0074
.6174
.0620
.0160
.0158
.1567
.0580
.0163
.0360
.0550
.0377
.0560
.0200
.2765 .-G163.7279.0156.1609.0900.0840.0336
S T A N D A R D1.00l . O D1.001 .001.00l . O C1 • O u1 . o Oi .C O1.0-jl . D O1.001 .001.001 .00l .OG1.001.00.1.03" l . Q O1.001.001.001 .001. u C1.001.00l . O D1 .001.001.001.001.00
' l . Q O -1.001.001 . D O1*001,001 .001,0-0
.00
.00
. O u
.00
.00
.001 ,001.001 .031 .301 .001 .001.001.00
LA FUNCIÓN DE E R R O R EÍJ LA E S T I M A C I Ó N 0 , 0 2 8
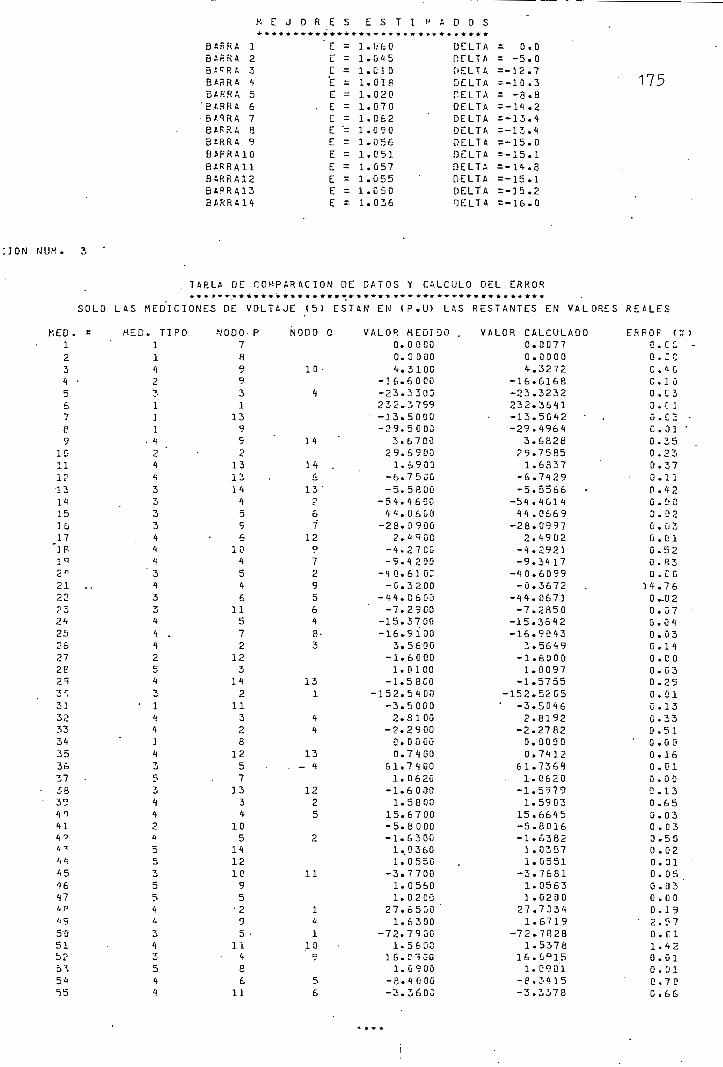
M E J O R E S E S T I M A D O S
B A S R A 1
B.iRRA 2B A P R A " 3EíííRA 4BíRRA 5B.4RRA 6Bí .RRA 7B A R R A BB iRRA 9B í F R A l OB A K R A 1 1BÍRRA12B A P R A 1 3BARRÁIS
' EEE
. EE
. EEE
. EEEEEE
======='=======
11111111111111
. l/fc 0
.045,C1 0.018.020.070.062.090.056.051.057.055.G50.036
DELTAD E L T A0£LTADELTAHELTADELTAD E L T ADELTADELTADELTADELTADELTADELTAOELTA
-
==-=-== -= -= -=-r-
= -
= -
= -
= -
0-51210-811131315151415Ib16
.0
.0
.7
. 3
.8
.2
.1
.4
.0
.1
.8
.1
.2
.0
175
:ION M U M . 3 '
- . T A B L A D E C O M P A R A C I Ó N D E D A T O S Y C A L C U L O DEL E R R O R
KED . * MED. T T P O - " Í O D O - P NODO O V A L O R HEDIDO . V A L O R C A L C U L A D O E R P O F í:1 1 7 D . O O C Q 0 .0077 O . C C2 i a o . o o a o o . o o o o o.:3
C . l üO . C 3O . í lO . C 2C . 0 1
9 .1 5 ' 1 1 ' 3.6700 3.6828 0.55I D 2 ' • 2 • 2 9 . 6 9 0 0 29.7585 0 . 2 3
1 1 13 11 . 1 . S 9 Q 3 1.6837 ' 0.371? '•13 3 11 13 ' -5.5800 . -5.5566 P.12
O15 3 5 6 11.Ü6C.O 11-0¿69 3 . 3 2
0 . 0 3
17 . 1 - £ 12 2.1^00 2.1902 O . G 1~3R 1 10 9 -1.2 7 Cu -1-2921 0 . 5 2
O . f t 3O . C O
2 1 . . 1 . 1 . 9 - C . 3 2 0 0 - 0 . 3 6 7 2 . 11.76? . 2 3 6 5 -11 .C6G3 -11.0671 0^02
0 . 5 72 1 1 5 1 -15 .370Q -15.3612 O . D 125 1. 7 8- -16.9100 -16.9013 0 . 0 326 1 2 3 3.5600 3.5619 0.1127 2 12 -1.6000 -1 .6000 O . C O26 5 3 1 .0100 1.0097 O . G 3
0 . 2 9
0 . 0 1
0.13
u-33
33 1 2 1 -2 .2900 -2.2782 0.5131 " 1 8 D . O O O ü 0 . 0 0 0 0 ' G . O O
0.16
0.01
7 . - 5 . 7 1 .0620 - 1.0620 O . Q QS 3 13 12 -1.6030 -1.5979 0.13
39 1 3 2 1.5800 1.5903 0 .6510 1 .' 1 5 15.67ÜO 15.6615 0 .0311 . 2 10 -5 .8000 -5.8016 0 . 0 34? 4 5 2 -1.6300 -1.6382 D . 5 0
0 . 0 20.01
15 3 10 11 -3.7700 -3.7681 0 . 0 546 5 9 1.0560 1,0563 0 . 0 347 • 5 5 . 1 .0200 1 , 0 2 0 0 0 . 0 01P 4 ' 2 1 27 .0500 ' 27,7334 0 .15
2 . 5 75'0 3 5 ' 1 -72.7930 -72 ,7828 O . C 15 1 - 4 11 1 0 - 1 -5600 1.5376 1.42b ? 3 - 4 ' 9 16 .?9GQ 16,0Q15 O . ü l
0. 354 4 6 5 - a . 4 0 0 0 -8 . Í415 ' 0 . 7 0
D . 6 6
A S M E D I C I O N E S
M E D . T T P O >í\
42i_
11
• 1• 4
2443333
. 444
' 34
3344 .42c
43
• 1u411j5.j14 . '24
55i•>•554434354ú
DE
O D O7ao
931
13952
131314
459c.
104546
11572
123
142
11328
12K
713
34
105
141210
95
• 295
11486
11
V O L T A J E < 5 >
. P N O D O
10 •
4
14
1 46
13 '•if67
12Q
7295648-3
131
44
13
— 4
1225
2
11
141
10Q
56
E S T Á N E N t P . U ) L A S
0 V A L O R H E D I D O .0. O O C Q0 . 0 0 0 04 .310D
-! 6 . 6 0 G O-23.3303232.3799
• -13.5000- 2 9 . 5 0 0 0
3.67002 9 . 6 9 0 0
1 .6903-6 .7500-5.5800
- 5 4 . 4 6 0 04 4 . Ü 6 & G
-28. 09002 . 4 ^ 0 0
- 4 . 2 7 C G-S.4 200
-40 .61 OC- G . 3 2 0 0
- 4 1 . C 6 G 3-7 .29CO
-15.370Q-16.9100
3.5600-1.6000
1.0100-1.58GO
-152.5100-3.5000
2.810G-2 .2900
0 » 0 0 000 . 7 4 0 0
61.74CO1.0620
-1.60301.5800
15.67ÜO-5.8000-1.6300
1..03601.0550
-3.77001.05601 .0200
27.0500 '1.6300
-72.79301.5600
1 6. ? 9 G O1 .G900
-a. i ooo-3 .360C
R E S T A N T E S E N V A L
V A L O R C A L C U L A D O0.00770 . 0 0 0 04.3272
-16.6168-23.3232232.3641-13 .5G42- 2 9 . 4 9 6 4
3.682829.7585
1.6837-6 .7429-5 .5566
- b 4 . 4 G 1 44 4 . 0 6 6 9
-28.09972 . 4 9 0 2
- 4 - 2 9 2 1-9.3417
- 4 0 . 6 0 9 9-0 .3672
-14.0671-7.2850
-15.3642-16.9013
3.5649-1 .6000
1.0097-1.5755
-152.52C5' -3 .5046 .
2.8192-2.2782
0 . 0 0 0 00.7112
61.7368- 1.0620
-1.53791.5903
15.6645-5.8016-1.6382
1 . G 3 D 71.0551
-3.76811.05631 , 0 2 0 0
27,73341,6719
-72 ,78281.5376
16,0Q151, C-90'l
- e . í 1 1 5-3.3¿78
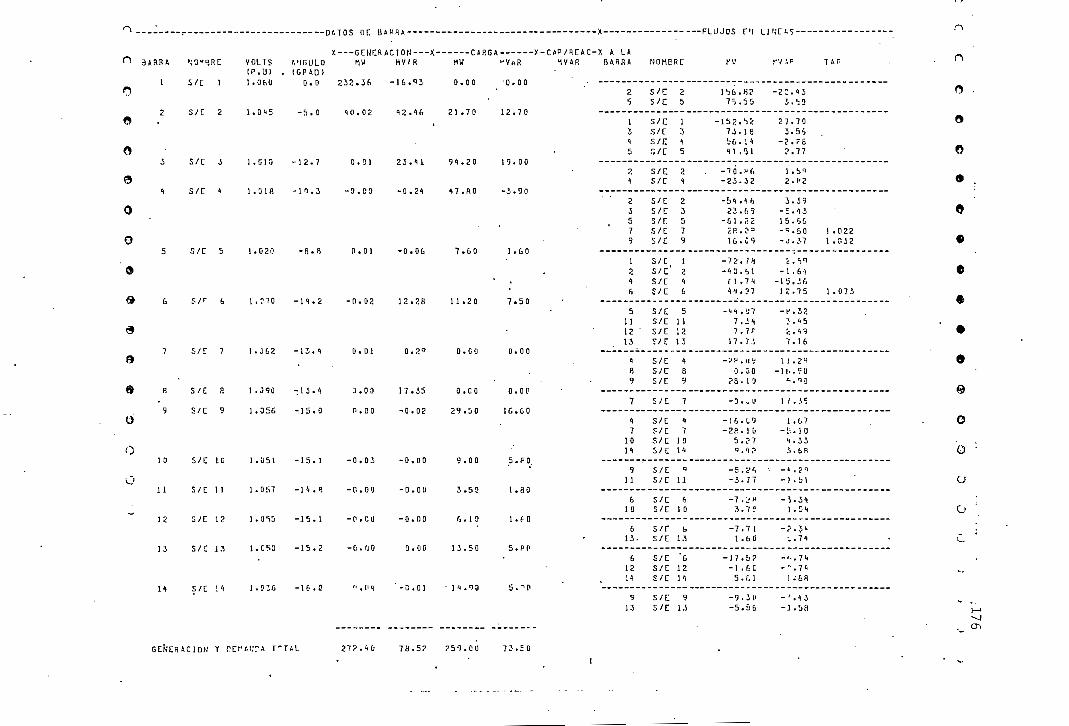
' -'
. [J
AT
OS
Oí.
ÜA
UH
A A
X G
EN
ER
AC
IÓN
X
CA
RG
A X
-CA
P/R
EA
C-X
A
LA^
9
AR
RA
MT
'JR
C
VO
LTS
A'lf
íUL
O
MU
H
V/R
H
U
"V¿
R
. ^V
AR
B
AR
RA
0 9 0 9 0 0 0 £ 9 O O o ^
IP.U
í .
(GP
AD
Í1
S
/E
1
J.O
fiU
0
.0
23
2.3
6
-16
. 93
0.0
0
.'0
*0
0
2 S
/E
2 1
*04
5 -5
.0
4. 0
.02
4
2*4
6 2
1*7
0 1
2*7
0
3 S
/C
3
1.G
10
-12
.7
C «
Q 1
2
3 .
41.
9
4.2
0 1
9.0
0
4 S
/E
4 1
*01
8 -1
0.3
-0
.00
-0
*24
47
*& 0
-3
.90
5 S
/E
5 1
*02
0 -
8 *
fl
(1*0
1 —
0*0
6 7
*6
0 1
.60
•1
,
o
/ r
í
i n i
n
i í
n
nn
l 1 o
-i u
i i i
n
1 e n
fa
o / '
b
li./U
—
1 1
* ¿
••
U *
U <
í J
¿ •
¿ O
1 1
t ¿
U
f • D
U
7 S
/i
7 1
.J6
2
— 1 .j
* 4
U *
I) 1
0 *
2
O.C
O
0*0
0
R S
/E
P
]«-i
9ú
—
13
.4
30
0 1
73
5
OC
O
00
0
9 S
/C
9
l.ít
SÉ
.- .1.5 .0
C
.QO
.-
0.0
2
29
*50
1
6*6
0
10
S/C
IO
1.0
51
— 1
5.1
—
0*0
3
-0*0
0
9.0
0
5*F
O.
11
S/E
Ü1
1 1
• 0
S7
— 1
*1
0 -
RO
O
-OD
£J
S'í
''
Iñ
O
12
S/
E1
?
J *
0 *í
5 -1
5.1
-O
.DO
"O
.üO
6
*1
0
l*fí
l
13
S/C
13
l.
Cfi
O
— 1
5*2
—
O.f
Ju
3*0
0 1
^.5
0
5.P
P
14
S/
C1
4 1
• P iG
-
1 f
» 0
''.[
'4
-O.Q
1 '
1 *t
* *)
0 5
«'1
tl
2 5 1 3 4 5 ?. 4
• 2 3 5 7 9 1 2 4 fi 5
11
12
'13 r,
• a 9 7 <, 7
10
14 9
11 6
10 6
13
.
612
11
913
NO
HR
RC
S/C s/c
S/E
S/C
S/C
S/C
S/C
S/C
S/E
S/C
S/C
S/C
S/E
S/E s/c'
S/C
S/C s/r.
S/E
s/c
?/c
s/c s/c
s/c
s/c
s/c
s/c
S/E
S/L
s/c
S/E
S/E
s/c
s/r
s/c s/c
s/c s/c
S/E:
S/E
2 5 1 3 4 5 2 * 2 3 5 7 9 1 2 4 g 511 12
'13 4 a y 7 <, 7
10
H
9
U
&1
0 b13 "fi
12
14 9l.i
r L
U JL'i
t '1
U
r.'
Ibfc
.H?
75
.55
-1
52
. 5
27
3.1
6b
&.M
4 1 .
rj 1
-7Ó
.KÍ
-23
-32
-54 .1
62
2 .
f: 9
-61 .Í2
ZR
,?"
16
. CS
-72
. 7f
j-4
0. M
f 1
, 7 1
4 'i .
? 7
-11
.27
7.3
47
.7f
! 7 .
7 .i
-VP
..J
V0
.00
?a . i
o
. -O
.-l)
-16
.19
-2
fl. 1
65
.?7
9. 'i?
-5
.y>
-3.
77
-7.L
-H3
.7?
-7
.71
1 .6
0
-J7
.Ü?
-1 .
fiC
S.f
.J
-9
. 3 0
-5.£
>6
.1 '1
1. *O
•
•* -
-----
rVS
P
Tfi
F
-2C
.43
í • ':
3
27
.70
3.5
$-?
.2£
?.7
7
l.bq
2.W
2
3.3
9-E
. 13
15
. S5
-*í.
60
1
*02
2-J
.J.7
1
.03
2
i.W
-1..
61
- 1
Ü .
3 f j
12
*75
1.0
73
-f.3
2Í.
^S
^.
49
7.1
6
1 1
.24
- 1
(• .
9 U
-i.
13
1 l , Í5
1 .6
7-
e. . i
o4
.33
3.Í
.R
•• -*.?
«!
-).b
l
-^
.34
1 .E
l
-?
.3t
-..7
4
-f.,
74
-".7
4i.-
üñ
-'.
43
-1 .5
8
o o n O O O O e o o o o
--J en
GE
NE
RA
CIÓ
N Y
P
Cí'
tt.T
A
TT
tL
27
?. 4
0 7
8.5
?
25
9.0
0
73
.SO
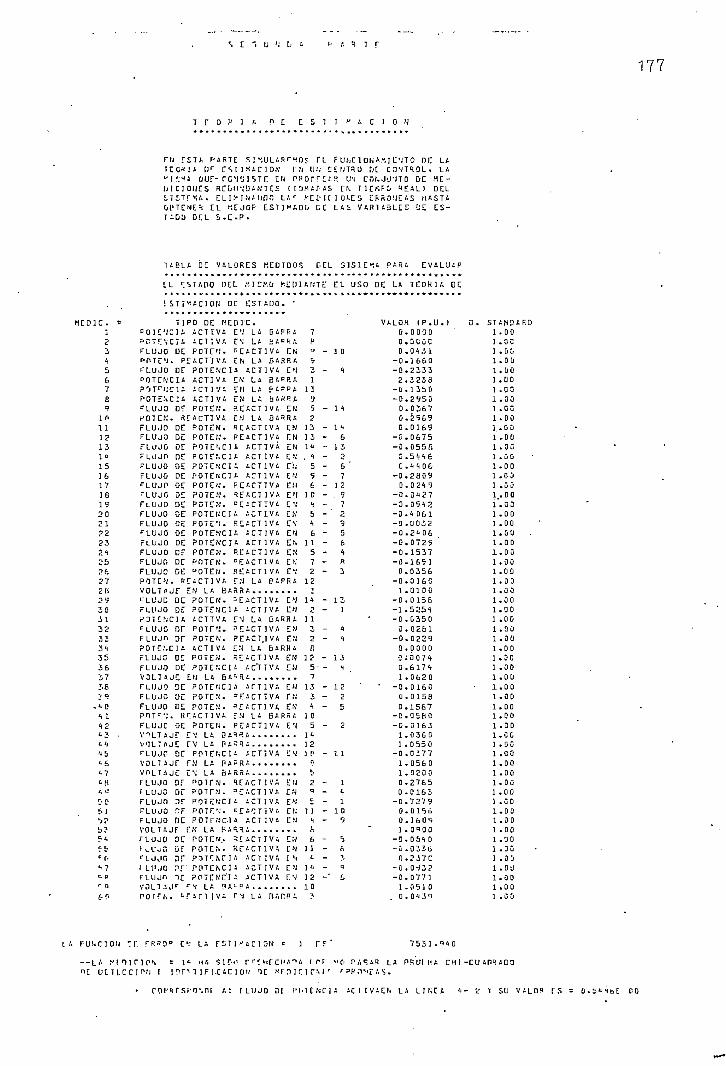
T r o P i A H E E S T I L A C I Ó N
CU f £ T A P A R T E SI lULAF.rMO? r.L FUí .C lOKAME'JTO OE LATECíMi nr E S T I M A C I Ó N r.N U:; C E f í I R O fíl C O N T R O L , LAi'iísa our- rc'msTE EN pforr:/.=* u-j CÍH.JU-JTO DE ME-D I C I O N E S R E D U N D A N T E S { T O M A T A S Cft. I"U«FO » £ A L ) DELí.1£,Tfy,A, ELi;j INMjfJO L¿r f C t ' I C ] D'.ES E n f t O ü í A S H A S T AGl 'TENER EL f íEJOP ESTRADO DE L A i V A R I A B L E S ÜE ES-T A D A DEL S.E.P.
T A B L A D E V A L O R E S MEDIDOS SEL S J S T E » . A P A R A E V A L U A R
67e9
in1112131"15161718192021?2
2728z-93031323334353637
- " OA 112
¿7A BA ar, r>
& ]5Pb?
L L ASTADO DEL MICHO MEDIANTE EL U
ESTIMACIÓN DE ESTADO. '
TIPO DE MED1C."OTÜ'JCIA ACTIVA EN LA GAP fifi^CTEVCIA A C T I V A c\ LA EA°I<AFLUJO DE PoTt'J. "-EACTIVA ENffiTE'J. REACTIVA tN LA f.ARRAFLUJO DE POTENCIA ACTIVA ENPOTENCIA ACTIVA EN LA B A R R APITECIA A C T I V A E>J LA f-A.PPAPQTí.'vCJA ACTIVA EN LA fcAHRAFLUJO Df POTEN. REACT I V A ENPOTEN. REACTIVA EN LA G A R R AFLUJO DE POTEN. REACTIVA ENFLUJO DF. POTEN. REACTIVA F.WFLUJO DE POTENCIA ACTIVA CNFLUJO DE POTf.'.CIt ACTIVA EVFLUJO OF. POTENCIA ACTIVA ti;FLUJO [>E POTENCIA A C T I V A ENFLUJO DE POTEN. R E A C T I V A EMFLUJO DE POTEN. R E A C T I V A ENFLUJO DT. POTEN. CE¿CTIVA E%'FLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN- R E A C T I V A E*FLUJO DE POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA E-NFLUJO CF POTEW. REACTIVA ENFLUJO DE POTEN. TACTIVA ENFLUJC DE "OTEN. REACTIVA EKPOTtf-1. R E A C T I V A CM LA P A R R A
FLUJC DE POTEN. -EACTIVA ENFLUJO DE POTENCIA iCTIVA ENPATENCIA ACTTVA EM LA C A R R ACLUJG Df POTF'J. -EACTIVA EWFLUjn DF POTEN. PE¿CT.IVA ENPOTE.'.CIA A C T I V A EN LA BARRAFLUJG DE POTEN. REAC T I V A EWFLUJO DE POTENCIA AC'TIVA EN
FLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. ^FACTIVft fNFLUJO DE POTEN. ^TACTIVA ENPOT"1:. R E A C T I V A F.N LA B A R R AFLUJC DE POTEN. RE A C T I V A EN
fLUJC DE POTENCIA ACTIVA ¡TM
V O L T A J E L\A B A R R AFLUJO [)f ^OTffií. R E A C T I V A ENf LUJO DE POTfN. °E'.CT]VA CNFLUJO DE POTENCIA A C T I V A ENFLUJO HF POTE';. -EA^TIV/- cf.'FLUJO DE P07EWC.1A ACTIVA EN
TLUJO DE POTEN.. R E A C T I V A ENFwL'jn ÜE POTEN. R E A C T I V A UNCLJJO nr POTt:^^IA A C T I V A E Ni LUJO nr'POTCNCU A C T I V A rwFLUJO ir POTENCIA ACTIVA EN
POTFh. ^fAfTiVA r<j LA HAHRA,
7PD
5-21
13952
131314. 4556
1 C4546
1157212
14 •2
1132fi
125'7
133.4
3 05
1 *1 21 ['
i,
2*í
E1 1
hf>
11í.
14121 0T.
SO DE LA TEORÍA DE
VALOR (P.U.)0.0000
- 1 0
4
- 1 4
- 1 4- 6- 13 •
2- 6 '- 7- 12- - 9_ -i
- ' 2- 9- 5- &
4
- fi3
- 1 3- 1
14
- 13 .4
- 12- 2- 5
- 2
- 1 1
141
- 1 0- 9
- 5- 6
7.q
-" £,
00
-0-02
-0-00ú0
-0-00C
-00
— u-D-0-0-0-0-0-00
1-0-1-00
-0DQ
01
• -o00
-C-G
1-01
100
-D00
-0-Ll
n-a-0
. 0
.3CDC
.0431
.1660
.2333
.3238
.1350
.2950
.0367
.2569
.0165
.0675
.0556
.544É
.4 0£
.2809
.0249
.0427
.0542
.4061
.0032
.2406
.0725
.1537-1651.0356.0160.0100.0158.5254.0350.0281.0229.0000;0074.6174. 062 0.016G.0158.1567.0580.0163. 036 0.0550.0277.0560.0200.2765.tM63.7279. OlSb
.1609
. EJ^OO
.061 0
. 0 33 b-237C. Q-J3?.0771.0510
S T A N D A R D1 .00l .OC1 .00
.00
.00
.00
.00
.00
. 0 0.00,0£í
1 . O C1.001.001 .001 .001.. 00Í'. O 23 .001 .00l.G'J1.001.001.00
.00
.00
.00
.30
. 9 0
.00
.00
.00
.001.001 .00l . & D1.001.001.00l . D O1.30l . C Cl . O C1 .001.001.001.001.001.001 .001.00
00003000ou0000
L A FUNCIÓN
- - L A !-fninr\: u c u c c i r n t
C': LA r S T J v t c i OH B ] f f '
14 H A sic- t 1 - r r f H r c H A ^ A i rr >nr> T IF I.CAC ION nc
7 5 3 1 . o ^ o
P A S A R L A PFÍUI HA cm - c u A D R A D O
A: F L U J O DI P Í - U N C T A A C I I V A E N LA L I .VEA 4- r¿ T su V A L O R rs - & . t f t t í j t : ca

PA
RT
IR
OC
L
OS
V
AL
OR
CS
OB
ÍCK
JD
OS
A
L A
PL
I-C
AR
L
A
TE
OR
ÍA
DE
C
ST
IK/.
C1
0N
D
E
ES
TA
DO
.
RE
PO
RT
E
DC
L
CA
LC
UL
O
OE
F
LU
JO
S
nt
PO
ICN
CU
P
A°
A
EL
S
IST
EM
A
CU
E
ST
UD
IO
X G
DJ
CP
AC
1Q
N
X~
- C
AR
GA
X -
CA
P /R
LA
C-X
A
L
AQ
AR
RA
NO
Mt'
RE
V
OL
TS
¿
NP
UL
O
MU
K
VA
R
MU
H
VA
R
"VA
R
BA
RR
Atr
.ui
(GUA
U)
'¿ i 3 1 5 2 4 2 3 •í 7 9 1 í1 f. b1
11
2 8 7 1 9 b1
0 6
12 9
13
s/r
s/c
S/E s/c
s/c
S/E
s/c
s/r
s/r.
s/r
s/r
s/r
s/r
S/E
S/E
S/E s/r s/c
s/c
s/c
S/E
.s
/rs
/r
s/c
S/E s/r
S/E
S/E
S/E
s/r
s/r
s/r
s/r
s/r s/c
S/E s/r
S/E
S/E
2 b 1 3 1 2 5 7 1.
'i 51
11
? R *i 7 71
0 <J1
1 &1
0 b 61
2 91
3
MU
l&fa 75
73
56
-70
83
-ti
-7
2
61 7 7
17
-2B -D 28 0
-16
-2F 5 9
-5
• -7 3
' -7 1
-17 -15
-9 -5
.62
.bb
. 1
9
.ííl
.f'7
.<*&
.70
.C '
'
.78
. í, 1
.73
.U,
.tb
.3t
.7T
. L
D.1
a
.LO
.0?
.1 &
.'t3
.77
.29
.76
.71
.bC
. L r :¡i
CV
z, ~£i
•¿7
-V
J
-E lí — c 'f 7
U-1
1 c
17 1
-1 1
-'£
-6
-C
1
-1
R
TA
I'
:íi .71
-Í-I
1.7
7 :l? •*t¿ . •.{,
.'.9
l.
(-?
2.
'7
1
.23
2
..T
t.7
5
1.C
71
.49
. 1
&
. "
1-S
!
.?b
.1)
-Í.Í
3
. íi 1
.í,*!
.?,4
.74
.74
.tfe
.F:7
t-J o
Y D
EM
AN
DA
F'.
TA
L T
/^.t
íí
7fl
.í»
.^
I'O
n.r
t'
7.'..',f.

LA FUUC10H Di. fHKOR E?J LA
- C O P R E S P O H D f A: FLUJO pr B M C T l V * C» LS L IME* 1 - 7 T SU V A L O R rs = _ O ."', ? DC - O 1B
LA FUNCIÓN I)E E R R O R EV LA C S T 1 K A C I O N « S H5.311
— LA M E D I C I Ó N a <u uA <nr)0 fJC^HFnUDA PO» 'JO l ' A S A K LA P R U f D A CH I-CU ADt AD'ODE D E T E C C I Ó N E IQCNMf I C A C 1 ON DE KEOIC IGMS EHK OMCt S .
- CORRESPONDE: A: . P O T E N C I A R E A C T I V A EN LA B A R R A 10 Y su V A L O R ES = o -saoor r -o i .
LA FUNCIÓN DE ERROR EN LA E S T I M A C I Ó N » 7 ES 25 .2S7
M E J O R E S E S T I M A R O S
BARRA 1B A R R A 2B A R R A 3B A R R A 4B A R R ¿ 5B A R R A 6B A R R A 7B A R R A 8B A R R A 9B A ° R A 1 0B A R R A 1 1BARRA12B A R R A 1 3B A R R A 1 4
CE£
EEEE
. EEEEE
. EE
=
=============
111
11111111111
.055
.0*0
. 0 0 5
.013 •
.015
. 0 6 4
.055
.084
.Olfl
.C12
.'0 * 9
.050
. 0 4 4
. 0 3 0
DELTADELTADELTADELTfiDELTADELTAD E L T A 'DELTA3ELTADELTADELTADELTAD E L T A 'DELTA
= 0— — 5= -12= -10= -8= -11= -13= -13= -15=-15
=-15
= -15= -15= -16
.0
.0
.8
.1
.9
.1
.5
.5
.1
.3
.0
.2
.3
.2
T A B L A D E C O M P A R A C I Ó N ot D A T O S Y CALCULO D E L E R R O R . . - ' . - / - - -
SOLO LAS MEDICIONES DE V O L T A J E (5) ESTÁN EN (P.U) LAS RESTANTES E-'J V A L O R E S R E A L E S
M E D . n12345
151617181920 '2122232425
. 2627282930313233343536373R39401142
454617
5152
MEU. TIPO1 -1423
. 1113 '244323
443
N'ODO P NODO 0
10
1111572
123
21132
101257
133
115
141210952
51148-
613
6712932
96483
131
12
11
111
10
V A L O R KEDIDOo. o o o o . •o .o o o o -4.31QC
-16- .6DCO. 3 3 0 0.3799.5000
232.-13.- 29 .5003
' -7.710029.6900
. 1.6900-6.750G-5.5800
1.390014.0600
2 . 4 9 0 0-4 .270023.7000
-1 C . & l O j-C.320G-9.3200
• -7.-15.-16.
3.-1.1.
. 2 9 0 G
.3700
.9100
.5600
. 6 000
.0100-1.5800
-152 .5*00-3.5 000
2.H100-2 .2900
1 . 0 0 0 00 . 7 4 D G
61.74001 . 0 6 2 0
-1.6000. 5 H D O. 6 7 0 0. 3 6 0 0
,3001.0360l . O ^ b O
- 2 . 7 7 0 0 *1.0560
1.15.
-1.
Q2CO
l . & z o o-72 .7900
1.Í60Ü1 6 . 3 9 C O .
V A L O R C A L C U L A D OO . O P 1 9O . G 7 0 7 .5.2451.-. -
-17.2245, '- -
232.349V--1-.1
-13.4633; ••;,.:
-29.1365 ' • ' • '<"-7.4391" . -29.7702
-6.6131: ":"--5.4516 ••'---•
41.2913 . ".. .- 2 8 . 2 & E 4 - _ . :
2 .2250 .-•••'-.-5.1901- ' " '-'23.6157
- 4 0 . 5 2 0 0 • •' •0.2010
-8 .7Í&2-7.7R50'" ' "•
-17.3946-3.5675
-1.43131.0049
-l.bÉ.25 -,-152.4901'-
-3-b2262.Ü663
1.04210.7742
61.6902Í .D543
-1.73901.6767.
-3 .9054-1.6111
1.C300
1.0151?7 .£> lb9
1 . ] 3 2 6
E R R O R ( S0 . 0 0
0 . 0 0
- 21.693.760.370.01
-.'" - 0 .27. 1.23
3.51
1.282 . 0 32 .303.49
. .0 .530 . 9 9
. 6 .63
21.550 . 3 60 . 0 7 .
I f i 2 . f t O '6 . 4 86 . 8 4 .0 .32 '2.870 .77
1 1 . H O0.501 . U 80 .030 .652.022.594.21
O . O R
0.688.6B6.120 . 1 4
16.231 .16O . S f i0.51
12.720 .72o.ia
' 0 .12¿0.51
3 . 0 7
33. 64D .h4
0 . 5 6

PARTIR
DE
LOS
VALORES
OPTEN100S
AL
ÁULI-
CAS LA
TEORÍA
OE ESTIMACIÓN DE CSTAOO. .
-
o o e..
RE
PO
RT
E
DE
L C
AL
CU
LO
D
E
FL
U J
OS
O
C ,
R0
7 E
NC
1 A
9
BA
RR
A N
OM
BR
E
VO
LT
S
ÁN
GU
LO
M
V H
VA
R
..
MV
„ ..
H
VA
R(P
.U)
(GR
AO
) '
. "
'.- •
',,;
: .
;-
';•
'1
S
/E-
1
1..
05
5
0.0
2
32
.35
--1
6. 5
6
;.' '
0 .
0 i}
:',. '
•/•
0 .
0 0
••>
;• '
2
S/E
2
1
.0*0
-5.0
3
9.9
0
' 1
2.1
7"
: 2'U
7 0 ;
1 2
.'7
Ó'''
. '.
'
«
' .
3
S/E
3
1
.00
5
-12
.fi
0.2
0
23
.5*
9*.
20
"1
9.0
0
* S
/E
* 1
.01
3
-1
0.1
0
.2*
' l.
*9
.-
17
.80
'
' -3 ¿
9 0
•". -.
.
e •
• -
• .
5
S/E
5
1.0
15
-8
.9
• 0
.27
O
.*0
7.6
0
1.6
0
-
O
6
S/E
6
1
.06
* -1
1.1
-0
.30
1
2.3
1
' 1
1.2
0
7.5
0
'?
S/E
7
1.0
55
-1
3.5
0
.08
-0.6
8
• 0
.00
0.0
0
•
.
O'
8
S/E
8
1.0
81
-1
3.
5
0.0
7
• 1
7.8
7
0.0
0
• 0
,0
0
9
S/E
9
1
.04
8
-1
5.1
'
0.3
6
-0.6
2
29
.50
1
6.6
0O o
.1
0
S/C
1
0
1.0
12
-15
.3
-l.
fi*
-1
.11
9.0
0
5.8
0
O1
1
S/E
1
1
1.0
*9
-1
5.0
-0
.02
-0
.02
3
.50
1.8
0
12
S/E
1
2
1.0
50
-1
5.2
0
.11
0.1
9
6.1
0
1.6
0
O1
3
S/E
1
3
1.0
*1
-15
.3
0.0
1
0.0
9
13
.50
5
.80
1-1
S/C
1
1
1.0
30
-1
6.2
0
.73
0.6
2
11
.90
5
.00
PA
RA
CL
SIS
TE
MA
CN
E
SIU
01
0
. ...
;•
V..
'
v:"'
""'-
"
iP/R
EA
C-X
A
LAH
VA
R;
_ ...
Í1
AR
RA
.• V
T".S
.?,
V .
2
. . ''.'
:/.
• .1
. '
: •'•
'.. :
"-. 3
' i 5
'2
-•'•
" -.'
•"
.'.
'2
- '
'.'. •
: ••;
' 5
••
••
".
7 9 1'
2 6 5
12
'13
•' "a
• 9 7 7
.1 0 1* o 6
10 f>
13 6
12
. .
11 9'
13
NO
MB
RE
..
's/r
".S
/E
S/C
. S
/ES
/E
S/E
S/E
S/E
: ' 5
1 E
S/E
'
- r,
/ES
/ES
/E
S/E
S/E
S/E
S/E
' S
/ES
/ES
/E
S/E
S/E
S/E
S/E
S/E
S/E
S/C
S/E
S/E
S/C
S/C
S/E
S/E
S/E
S/E
S/C
S/E
S/C
S/E
S/C
' 2
;'5 1 3 5
•
2 1 .
2 3 5 7 9 1 2 6 5'll
12
13 ' 1 8 9 7 7
10
11 9
11
•& 10 6
13 6
12
11 9
13
MU
H
VA
R
7A
P
v
15
6,8
2,
75
.53
-15
2.1
9
56
,11
41
.19
-7
3.
/G•
-23
.21
23
. G
2-6
1 .
17
2fl
.;>
2)6
. 1
9
-72
.71
-ID
. 'ja
61
.69
11
.2
5
-14
.29
. 7
.B5
'
• 7
.51
17
.13
-2
8.2
2-3
.0 1
2 ,Í .
3 7
0.
J7
-16
. iy
-23
.37
6.b
ia
. a?
-6.5
9-1
.25
-7.7
91
.27
-7
.11
1.7
5
-17
.23
-1
.71
5.5
0
' -a
. 72
-5.1
5
-20
.18
'
''
'3.&
2 '
27
.62
,
•3
.59
-2.2
3G
.fiO
l.b
fl2
. 8
7
15
.Í.5
-h.1
3
1 .
02
2
t/»
20
1 .
03
2
2.6
2
-1 .U
-15
.32
13
.11
1
.0
73
-C-.
5H
1.0
1
2.3
2
7.
U 2
10
.12
-1 7
.39
6.5
9
17
. «
7
1 .1
3-5
.75
b.2
*
• 3
.03
-5
.19
-2.0
5
-¿
.91
2.C
9
-2.1
90
.77
.
-6
.6Í
-5.7
71
.67
-2
. .8
2
O © 9 9 O O oco ro

ro co
Ul
*•c
-J
LJ
o
o .
o c
er-
r—
O
i
E u
rc.
t- t
l/I U
. C
- U
j O
-1 U
J|
£.
£
Q Q
"
•* y.
_1 «
j t/
) I—
LJ O
I/)
• uj
tr
O
(K
U
LJ ££ O tj H -i _J U! a o ti rj -j u¡ ui
i- L;
-4 UJ
O V.
i' _¡
Ul
o o „!
t— (/; LJ
_J
UJ
,1
M a'.
•"'•
•'. /
. :
-, .. . •
• O
O fi O
o. o
o r
- -o
<**
a
o
r~-
vfl
0 0
0
rH
•-'.
' ' :
• i '
•O
CC O
O
el "1
1/1 °
•1 N
(O
ÍT
*N
M .H
o
OO
OO
OO
fV
JC
JO
o o f. LJ
U)
Cl •z o o •1 3 f-i
f— i/)
LJ *
-J
1
1
>
;.
•J3 1
r- u
; i\
&•
*~*
i l
' ,
• *.
. •
<r.
1
••'I
--i fl *3
1-1 "
"*
a
a:
ui n: ui
nr u;
wo ir
u:
a:
a.
a:
• _
l _J
u
-J
u -,
rt
-,a
LI L
J « LJ
Ul
' *~
> >
H >
Ul
•— •-
U
.' >—
U U
C
' LJ
| O
*1
*1
C
L -I
a,
ui
¡-i i
-j
u;
t£t- i-
•- C
:u u
•
2^
0.;
t- H
13 t-
CJ
0
_J
f S
h- 1
< -i
-I;-
2: s
'i L
J U
I LJ
"-1
S >
>
>
!-..
. .
•
f -
-i..
• ,
"'"
*•'••
; ':-
> -
~- ti
tri
pnO
tO
iO
f-
'1 cr
» fH
v/j
C3
(M o
0
a c
a o o
. •
1
í •
r .'
*r
o--"
. rH
II
I
iri
rJ r
o rl
H
>H
: ;
"' '
,'",'
•;,'•
*
*'. '-
.,;
-> *
"
Ul
\a O
en
ti>
íl 3
- o
o
<•/)
ij-
-4
" tD
{\
o m
;r
ty o
o o
o o
oI
II
n'w
*í)
r- w
•H
r-<
1 1
t
1
t
-a
-T in
cri
*nfH
LJ Q
: U
l LJ LJ LJ U
J L
J U
)u:
>a
3>
>>
>>
>>
í- -
i i-
t-
•i
-i <
iLJ C
UI U
a: L
J tr
a:
n >
z ^
' '!• f/
V'V
1'1
...
"~ í
\rj
ÍT
<f-
ÍT
»0
0
o o
1 1
(Ti t-
1
1
a ^
»-*
•
LJ L
J
t- 1
- H
r-
1- H
H
LJ L
J L
J•4
<£ <
«t
O'
f-.
t-t n
I-,
:: ¿
!
r:
t a
;
y j
-
••V
. •'•
;-. •
J
. .-
' .\:'.'
-
.'
-' .
' •
1-1 C
M JJ
tr»
\a K
I o (
\o a
<r r-
jf a
íT
o
o a
o o
> 1
1 1
.. • i
*';'*
'.'
' ••
•.
CNf
Cl
1/1.
UI
li
li
ir.
tf )
»M r-t
- '
- .
•
••í.1^
'1.,.J.
. .. .
. j,
tr» r
* \o d
Q t
r« in
'O1/
1 vfl
fO rl
i-í
H 13
O
a o
o o
1 1
'.
-' '
<• o;
P,
•
II
I-
LO r
- r\
OJ •
LjL
JU
JU
JL
JU
JU
Jrt.
UJ
<x
a:
<f «i
"-*
^
¿ 2
U
M ...
— . u
,.
1.1 L
J LJ U
l I.J
Ll
LJ L
J L
J líJ
UJ
L^ L
J
O U
t_
J U
a. ^
o. i
LJ -í
«t
«1C
>-
» 1—
t--
LJ U
LJ
a 2
n ::
rs »
~ i- i-
_)
O O
O
O LJ O
O
o. «
i o.
a.
UJ
Ll
a- U
I U
lc:
DO
<C 3
0 O
=3 t-
13 3
-I 0
-J
-1
o o
o o
oa.
a, tu
a o.
UJ
U LJ U
LJ
Q a
a o
a
0
O O
O O
o 3
r> =
> zj
¿¿
¿ ¿
¿
o o
ü-
Q.
LJ L
Ja a
o o
3 3
¿ ¿
O O
O
O
(V
CL Q
. (X
UJ U
l U
U
CO
DO
O O
O
O
3 D
2 Z
)
¿¿
¿¿
LJ L
J u
j r:
a
Q: n
: uj
^ ^
S >
UJ
Uj ui i-
o o
o u
a. a
a, -i U
!LJ
u LJ
n"
a o
Qi
O D
p
rj D
=j »
-¿
¿¿
£
• ' •
'.•" ,
-.' '
• •
i . :
L3 r
o -
j1 i>
J
a in
m r~
mr-
t T-
< T
J [')
i-\a
D u
i «i
o
,
• '•
• '.'-
'•'.',
' '
* •
rar-
tON
Q^'
^-O
rací
u">
ttniA
ior-
-r-[
i1fV
f^p
l o
JC
Vo
o^
sr
iD
r\o
ra
Qc
ici>
a^
or~
•H
O.-ic
inrjo
or3
oa
a.-ia
lili
* .• '
f-J
tH ^1
O
i-t
tH
*-4
t 1
1
1
l-í J
[\ O
r-
4•-I
i-1 r<
Ul
UJ |,J
10
)•-
H í-
h-
n:
UJ
uj
ce a;
< -
í u:
<
— '-
-
y ::^
•z
<
Ul LJ U
l U
J
L- o
a o
7
u. c
u a. o.
uLü
UJ M
UJ
ui a a
a n
-3 1 O
O O
O
-j T
J :D
ri P
> ¿
¿¿
u
II
.
II
.
ij-
<t-
r> fl
a-
•-(
•H
1
1
1
1 1
1
rH
rt
Cu
0^ IV
U
l it r- U
JfH
.H
r-
a:
uJ L
J' u
U
j i.i
rr
uj
o:
' n
-4
h-
r- i-
t-
' t-
<i
i-
^ LJ L
J
UJ
? ic
L¡a
n;<
ar«
iL.i
[i,'
tM
»H
-I
>-•
>^
^¿
:H
a:> r
"- LJ L
J |J
UJ
LJ —
-J
UJ
L.
IO
OO
OO
U
O
-í<
xti
.a.o
. a
.«*T
TQ
.U
l1
LJ U
tJ
U
J U
J «I
U.'
'-lO
OU
Qü
'-iU
JC
)O
U
T^
oo
oc
cirto
•^
rjO
D^
rJ
Í^
Üjr
j
^^
¿¿
¿^
gS
^
. > ;. .
C3
CC
ff* ifl
•¿i
ID »
T r-
f-1 r-i
O
aC3
o
r»
j o
o o o
ci
1 1
(M
fvj
ÍM in
•H
lili
(0 M
c-
t (\
-< UJ
LJ
UJ
LJ
LJ u
; uj
<
CK
(C
LTf-< x a
K s
Uj
LJ U
,' U
J
O O
O
O
ix a
. a
o.
Ul
UJ U
l U
JQ
Q
Q O
O O
O
O
-J J
J _
J
Q L
JU
J U
JX I-

FU'JCIO'Í n£ T R K n R CN LE E S T I M A r j O N a ? C r.
— L A ycnicuiN a r HA s i ró '"•stiECHAn; f-r^ *:n P A S A H LA PRUEIU C H I - C U A D U A D Oni' ocucc ior* c inc 'vT IF T C A C io\ KCDinc \c i . E R H O N F A S .
ONDE t; P O T E N C I A A C T I V A E"! LA f U R R A 13 Y SU V A L O R ES = 0 . 1 3 b O C
184.
LA FUNCIOf, f)E ERROR EN LA ESTIMACIÓN E5
— LA M E D I C I Ó N S ?1 HA S IDO D E S M E C H A D A PO^: NO P A ^ A R LA P R U E B A Chl -CU ADR AD.ODE D E T E C C I Ó N E IDEfJT IF I C AC ! O.'J DE MEDIC10MF-S E^
C O R R E S P O N D E A: FLUJO DE P O T E N C I A R E A C T I V A EN LA L I N E A 5- 4 Y SU V A L O R ES = 0 . 1 5 G 9 E DC
LA FUíJClOíí DE E R R O R LA ESTIMACIÓN í 0.051
M E J O R E S E S T I A D O S
B A R R A 16 A = R A 2BARRA ;BAR R A 13 ACRA 5B A R R A 6B A R R A 73 A ñ R A 5B A R R A 9B A R R A 1 0B * P R A 1 1B A R R A 1 2B A R R A 1 35ARRA14 '
EEErrr
L
L
E• ' c-
rEe-
E
=
====='=====
== .=
1.1.1.1.1.
1.r.i.i.i.i.i.i.i.
CbG045G1CQIfi020G70062esoG56051C57055eso .C36
DELTATELTADELTADELTADELTADELTADELTADELTADELTADELTADELTADELTADELTADELTA
-== -
= -== -= -= -= -= -= ---
= -=-
0_c
1210-fil<r15131515M151516
.0
.0
.7
.3
.8
.2
.4
.*
.0
.1
.8
.1'.2.0
CIO'J MJtt.
T A f l L A DE C O M P A R A C I Ó N DE [ ) A T O S Y CALCULO DEL E
MED .12345
•5789
101112131*15161718192021222321252fi27232930313233313536373839
t?.
A S M E D I C I O N E S
M E D . T I P O11
.3 - ."23-
' 1 '4
14244
' 333344 - /43n23444244T
3414
. 134i •
15*-T
D E
f J 0 D 07a
129
' 311
1092
• 131311
4
596
10453&
11372
122
112
10• 11
1132fi
125
1175
13
V O L T A J E ( 5
P N O D O
6
4
.2
14
146
13267
12972956-2P,3
513
11110
117
134
112
> E S T Á N Ef.' ( P . U ) LAS
Q V A L O R ' 1ECIOO ''"- 0 . 0 0 90 . : ; -•G. 0 000
-7.7100 . ••- 1 6 . 6 0 0 0 " * - . ,'-Í-23.3330 /232.3799 ' . *- 29 .3900
. -9 .0000 '3 .6700 . -
2 9 . & 9 0 01.6900
-6 .7500-5.5P3Q
- 5 4 . 4 6 0 04 4 . 0 6 0 0
- 2 B - 0 9 C O2.1 9 G O
- 4 . 2 7 0 0• -5. 4 220-40 .61 30.
- C . 3 2 M- 4 4 . 0 6 0 0
-7 .290C1.5800
-16-91353 . 5 & 0 0
-1.6 000G . 7 6 0 0
- 1 . 5 A O G-152.54 00
-3 .77001.5600
- 3 . 5 C G O2 . H I G O -
-2*21-30 ' •0 . 0 D t-30 . 7 4 0 0
61.7100-1 4, n O C O
l . í ) f > 2 3 '-7 ?. 7 IGO
-1 .6000
R E S T A N T E S " E!l ' V A L J
V A L O R . C A L C U L A D O "-0 .0042" :•:/-
O . O O G 5 .- .'•-7.7066- ' - • "
:; -16.6015 ," -'•" " : -23.3284.:.- -'-.
' ' 232.4ñ55*i ^-20.3?'?2 • • - ' '
-a.9968'- ' ."• -3.6.B39 -.;..->
29. £ 4 2 2 - ' >;1 .6695- ' , 1 ' .
-6 -7494 -'"'-5.5781 -."-•.:
-bl-4525 ;. .-44 ' .Qi96
-2*1.0767 "•"2.4919..
-4.2"fi25--9.2916 ' •
-40 .6010• - G . 3 3 B O '
- 44 .0393 •;-7 .2H56
1.&691 "-16.9075 - • '
•5.58ÍÍ2 . '•- 1 . 6 U G 9
0.8165-1 .5HG4
- I b 2 . ó 2 0 3. -3.7725
1.5603-3.5009 - . -
2 .8218-2.2515
Q . C ' O O l0 . 7 4 2 0
61.7265-14 .8346
1 . 0 f , 2 D ' '-7 2 . 7fJ£,2-1 .6002
' ERR.1R ( X )' - • • - ' 0 . 0 0 • -: . * - . • o . o o -. - ' ' - . 0 .04 . . . .';•-'• o .o i ''>H. 0 . 0 3 ••'• • - 0 . 3 5 ' •
' • - C .35 'O ,G1 '
. -.' - 0 . 3 8 - -;.0.51
•;. 0 .03 :o . o a
• 0 . 0 3 •• . - - o.ci - -• . . Q . 0 5
0 ..G 5, ... 0 . 0 7 '
0 .290 .300 . 0 2 •
. 21.240 .050 .06
0 . 6 90 . 0 1
• • 0 .79 '0 . 35 .7 .14
0 .030 . 0 50 .070 . 0 2 . -O . G 2
0 . 4 21 .68O . fi O0 .270 . 0 20 - 0 4
• 0 . 0 0 •0 . 0 1
0 . 0 1

DL' LAS V A R I A Í 1 L C S DL ES-
Tí DO
M E D I C .1
1314
' 15161718192021222324252627282930313233343536
ar V A L o ^ f s HEDIDOS na SISTEMA P A R A E V A L U A R
CL F.1TAUQ DfL M I S M O M E P I A M 7 E EL USO OC LA T E O R Í A DC
186
ESTIMACIÓN DE ESTADO.
TIPO HE MEDIC.POTENCIA A C T I V A fN LA B A R R APOTENCIA ACTIVA FN LA B A R R AFLUJO DE POTfNCIA A C T I V A ENPOTEN. R E A C T I V A EN LA B A R R AFLUJO HEPDTENCüPOTENCIAPOTFVCIAFLUJO DE
POTENCIA ACTIVA ENA C T I V A EN LA B A R R AA C T I V A E\ LA B A R R AA C T I V A CU LA B A R R APOTEN. R E A C T I V A EV
POTEN. R E A C T I V A EV LA B A R R AFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO REFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO DEFLUJO REFLUJO OEFLUJO DE
POTEN. R E A C T I V A ENPOTEN. R E A C T I V A ENPOTF-NCIA ACTIVA ENPOTENCIA AC-TIVA -ENPOTENCIA • ACTIVA ENPOTENCIA ACTIVA ENPOTFV. 5 F ACTIVA £NPOTEN. REACTIVA ENPOTES. REACTIVA ENPOTENCIA ACTIVA ENPOTEN. RE A C T I V A ENPOTENCIA ACTIVA £NPOTENCIA ACTIVA ENPOTEN.- REACTIVA ENPOTEN. R E A C T I V A ENPOTEN, R E A C T I V A EN
POTEN. R F A C T I V A EN LA G A R R AVOLT AJE (
78 .
12 -93 -1
131P9 r
213 -13 -14 -• 4 -5 -a _
6 -
10 -a, ~
5 -4 -6 -
11 -5 -7 -2 -
12-*. *
FLUJO DE POTEN. REACTIVA EN 14 -FLUJO DEFLUJO DEFLUJO DEPOTENCIAFLUJO DEFLUJO DEFLUJO OE
POTENCIA ACTIVA ENPOTENCIA ACTIVA ENPOTEN. REACTIVA E*íA C T I V A E'J LA B A R R APOTEN. REACTIVA ENPOTEN. REACTIVA. ENPOTENCIA ACTIVA EN
2 -10 -11 -113 -2 -8' -
e,
4
14
1 46
13267
1297. ' •2956 '4e
' 3 . " ..
131 • •'
11 •1 0
44
7 ...
VALOR CP.U.) o,0.00000.0000
-0.0771-0-0
20
-0000
-0-0-0•o-0' 0-0-0-0-0-0-00
-a• '. 0-0-1
'•• -o-1
• ' -0
. • . o. -.'. —0• ••• : o
•-o. " . •. 0
.1660
.2333
.3238
.1350
.0900
.0367
.2969
.0169
.Q&7S
.0558
.5446
.4406
.2809 -
.0249
.0427
.0942 .
.4061 '
.0032 '
.4406 •
.0729- ;
.15.09 • •
.1691 '
.0356 ; • .
.0160 • '
.0100 '-".".. ' '' "•
.0158 " ••..- • .'
.5254 . •'. - •
.0377 (
. 015b '.-•'. ....•
.0350.-:: ••;.
.028 1./ . -'.; •
.0229 "
.0000
S T A N D A R D
O ü00O U0000
1.001 .00
.00
.00
. 0 0
. 0 0
. O í )
.00
.00
. 0 01.00
.00
.00
.00
.00 '
.00 •
.00
. D O - " '1.001.001 .00l . 'Of l •'1.00. .1 .00- ' 'i .ob'1.001 .00 . . . . .1 . 0 01. O QT,.1.DGV-"
l.OD".
L A - F U N C I O N OE E R R O R EN LA EST IMACIÓN »" ES 40723.625
— LA MEDICIÓN " 2P HA SIDO DESMECHADA POR NO P A S A R LA PRUEBA CHI-CU ADRADO"DE OE'TECCION E IDENTIF ICACIÓN DE «EDICIONES ERRÓNEAS. "'. ; • .. • • -TT^'
CORRESPONDE A: VOLTAJE EN LA B A R R A 3'Y.-SU VALOR. ES =-0. IDl'OEV Ol-'í.'
LA FUNCIÓN OE ERROR EN LA ESTILACIÓN * ES 4450512.000
—LA MEDICIÓN 3 7 HA SIDO DESHECHADA POR NO PASAR UA PRUEBA CHI-CUADRADO ..".DE' DETECCIÓN E IDENTIFICACIÓN DE KEOICI OfJES ERRÓNEAS.;; y . '• ..."'.r*1-. • • "'• V
* CORRESPONDE A: POTENCIA ACTIVA EN LA B A R R A 13 Y SU VALOR ES'='o.l350E 00
FUNCIÓN DE ERROR EN LA ESTIMACIÓN » ES 18706556.000
—LA MEDICIÓN « 3 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADO• •DE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS. ... ,. i . V •. '
* CORRESPONDE A: FLUJO DE POTENCIA ACTIVAEN LA LINEA 12- 6 Y-SU VALOR ES =-0.7710E-01
LA FUNCIÓN DE ERROR EN LA ESTIMACIÓN 1870649&.000
—LA MEDICIÓN * 5 HA SIDO DESHECHADA POR NO PASAR LA PRUEBA CHI-CUADRADO 'DE DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS. .
* CORRESPONDE A: FLUJO OE POTENCIA ACTIVAEN LA LINEA 3- 4 Y SU'VALOR ES =-0.2333E 00
L* FUNCIÓN DE ERROR FN LA ESTIMACIÓN ES 1B705952.000
—L¿ M E D I C I Ó N 3 17 HA S IDO O E S H E C H A D A POR NO P A S A R LA PRUEBA C H I - C U A D R A D OD E DETECCIÓN E IDENTIFICACIÓN DE MEDICIONES ERRÓNEAS. - . . . .
C O R R E S P O N D E A: FLUJO DE P O T E N C I A R E A C T I V A EN LA LINEA 6-12 Y' SU V A L O R ES = 0 . 2 4 9 0 E - 0 1
NÍ3 C O f f V F 4 l í £ : Sf F X C f n r UL PC I T E H * C I O f j r S EN L A C O N V E R G E N C I A

4.3. SISTEMA NACIONAL INTERCONECTADO (SISTEMA REDUCIDO)
4.3.1. Diagrama ünifllar
- 187

188
4.3.2. Características generales
- Sistema radial
- Patencia base . : 100 MVA
- Numero de 'barras . : 25
Número de elementos • : 26
- Número de barras de voltaje controlado
- Número de barras de carga : 19
- Número de la barra oscilante
- Datos en p.u.
- Criterio de convergencia para el flujo de potencia: 0.001
- Criterio de convergencia para estimación de estado: 0.0001
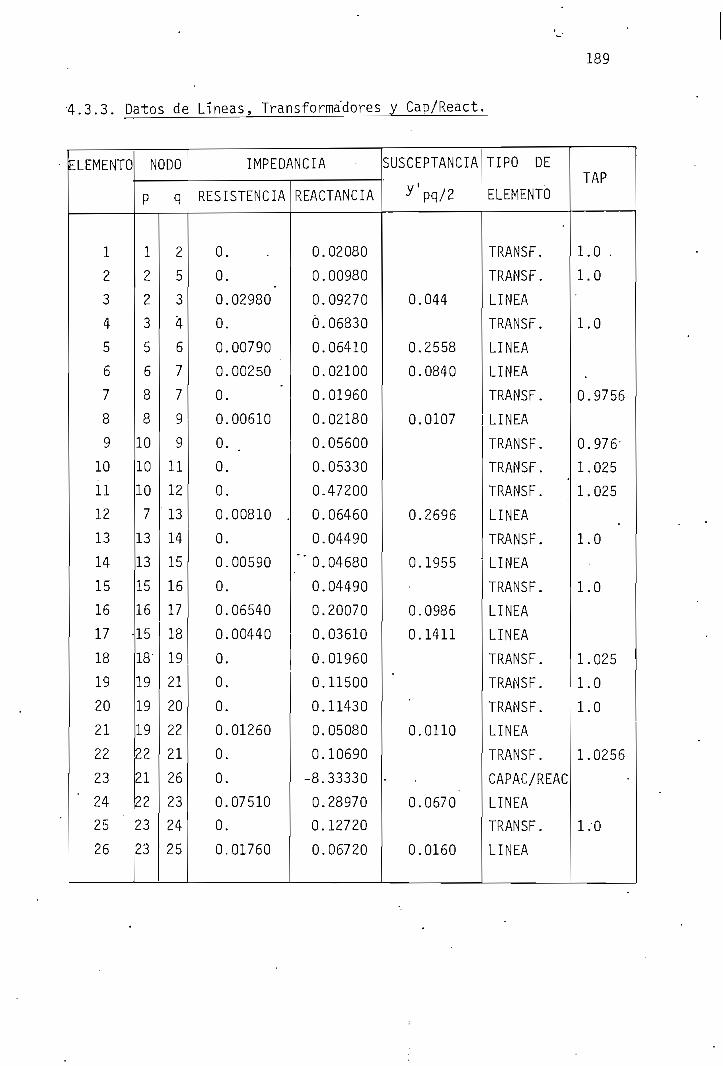
4.3.3. Datos de Lineas, Transformadores y Cap/React.
189
ELEMENTO
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
NODO
P
1
2
2
3
5
6
8
8
10
10
10
7
13
13
15
16
15
18'
19
19
19
22
21
22
23
23
q
2
5
3
4
6
7
7
9
9
11
12
'13
14
15
16
17
18
19
21
20
22
21
26
23
24
25
IMPEDANCIA
RESISTENCIA
0.
0.
0.02980
0.
0.00790
0.00250
0.
0.00610
0-0.
0.
0.00810
0.
0.00590
0.
0.06540
0.00440
0.
0.
0.
0.01260
0.
0.
0.07510.
0.
0.01760
REACTANCIA
0.02080
0.00980
0.09270
Ó. 06830
0.06410
0.02100
0.01960
0.02180
0.05600
0.05330
0.47200
0.06460
0.04490
" 0.04680
0.04490
0.20070
0.03610
0.01960
0.11500
0.11430
0.05080
0.10690
-8.33330
0.28970
0.12720
0.06720
SUSCEPTANCIA
y'pq/2
0.044
0.2558
0.0840
0.0107
0.2696
0.1955
0.0986
0.1411
0.0110
-
0.0670
0.0160
TIPO DE
ELEMENTO
TRANSF.
TRANSF.
LINEA
TRANSF.
LINEA
LINEA
TRANSF.
LINEA
TRANSF.
TRANSF.
TRANSF. '
LINEA
TRANSF.
LINEA
TRANSF. .
LINEA
LINEA
TRANSF.
TRANSF.
TRANSF.
LINEA
TRANSF.
CAPAC/REAC
LINEA
TRANSF.
LINEA
TAP
1.0 .
1.0
1.0
0.9756
0.976-
1.025
1.025
1.0
1.0
1.025
1.0
1.0
1.0256
1.0

BARR
A
f P 1 2 3 4 5 6 7 8 9 10
. 11 12 13 14 15 •
16 17 18 19 20 21 22 23 24 25
TIPO
0 C C C C C C C C C -G G C C C C C C C G G C C G •
C
VOLT
AJE
ESPE
CIFI
CADO
1.05 +
JO.
1.03 +
JO.
1.02 +
JO.
1.03 +
JO.
1.00 +
JO.
1.03 +
JO.
GENE
RACI
ÓN
Pp (p.u)
1.400
0.300 .
0.150
0.750
0.600
Qp (p.u)
0.060
CARG
A
Pp (p.u)
0.360
0.145
0.200
2.800
0.430
0.077
0.112
2.100
0.235
:
0.'400
-
Qp .(p.u)
0.170
0.052
o: 090
1.250
0.150
0.077
0.060
0.900
0.100
0:220 •
QMAX
(P-
U)'
0.94
0.20
0.30
0.80
0.33
QMIN (P.U)
-0.30
-0.25
-0.25
-0.45
-0.36
Cu
rt- o tsi
O-
(D cr
cu -s -3 PJ o QJ
t/l
O
O
191-
4.3.5. Solución del Flujo de Potencia
Una vez conocidas las condiciones de operación del sistema, se pro_
cede a realizar el cálculo del estado del mismo y a encontrar los
valores dependientes de las variables de interés.
A continuación en la siguiente tabla se muestra la solución del
flujo de potencia calculado para las condiciones dadas.
Los.resultados del programa digital se muestran a continuación.
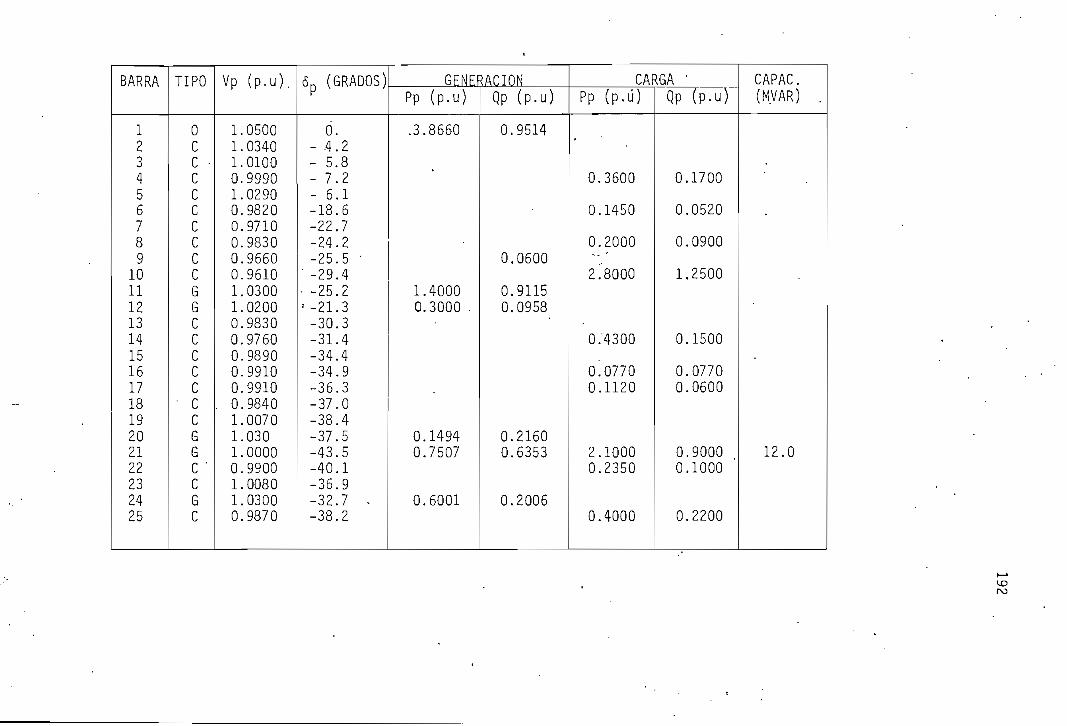
BARR
A
1 2 3 4 5 6 7 8 9 10 11 12 13 .14 15 16 17 18 19 20 21 22 23 24 25
TIPO 0 C c
•C c c c • c c c G
. G C C
-C c c
• c c G G C '
C G C
Vp (p
-u).
1.0500
1.0340
1.0100
0.9990
1.0290
0.9820
0.9710
0.9830
0.9660
0.9610
1.0300
1.0200
0.9830
0.9760
0.9890
0.9910
0.9910
. 0.9840
1.0070
1.030
1.0000
0.9900
1.0080
1.0300
0.9870
6p (GRADOS)
0.- -4.2
- 5.8
- 7.2
- 6.1
-18.6
-22.7
-24.2
--25.5
'' -29.4
- -25.2
* -21.3
-30.3
-31.4
-34.4
-34.9
-36.3
-37.0
-38.4
-37.5
-43.5
-40.1
-36.9
-32.7
v-38.2
GENE
RACI
ÓNPp (p
.u)
.3.8660
1.4000
0.3000
.
0.1494
0.7507
0.6001
QP (p.
u)
0.9514
0.0600
0.9115
0.0958
0.2160
0.6353
0.2006
CARG
A '
Pp (p.ú)
0.3600
0.1450
0.2000
-- '
2.8000
0.4300
0^0770
0.1120
2.1000
0.2350
0.4000
Qp (p.u)
0.1700
0.0520
0.0900
1.2500
0.1500
0.0770
0.0600
0.9000
0.1000
0.2200
CAPA
C.(M.VAR)
.
12.0

193
En base a los resultados del flujo de potencia se simularán las me_
diciones para estimar el estado del sistema, con lo cual se proba-
rán varios casos:
- Estimación para 53 mediciones (25 mediciones de Pp, 25 mediciones
de Qp y 3 mediciones de voltaje).
- Prueba para determinar un buen conjunto de mediciones.
- Estimación de 80 mediciones (máximo número de mediciones permisi-
bles del programa).
CASO 1.- Estimación para 53 mediciones
El propósito de esta prueba es conocer si es posible determinar el
estado con todas las mediciones de inyección de potencia posibles
y varias mediciones de voltaje para mejorar la redundancia local.
En primer lugar se estima el sistema con las mediciones anteriormen_• f
te mencionadas obteniéndose resultados satisfactorios como se~ podrá
ver., en el resultado 1 del programa digital. Si se escoge al azar
cualquier valor simulado y se lo hace erróneo, se .nota que el algo_
ritmo de estimación no está en capacidad de- detectar errores (Ver
resultado 2).
CASO 2.- Prueba para determinar un buen conjunto de mediciones
- Si se aumenta el número de mediciones a 58 (mediciones combinadas)

194
"se puede ver que el estimador no da resultados, puesto que la re_
dundancia es muy pequeña (Ver resultado 3).
- Continuando con la prueba, se aumenta al conjuntp de mediciones
dada en el paso anterior varias mediciones de voltaje para mejo- .
rar- la redundancia local (esto se hace porque el sistema es ra-
dial), como se puede apreciar, si se tiene un conjunto de 65 medj_
ciones, es decir una redundancia de 0.32, el estimador todavía no
da resultados aceptables (Ver resultado 4).
- Si se aumenta 2 mediciones de inyección de potencia en la zona- don_
de el estimador no da buenos-resultados, se nota-que ahora se ha
mejorado la estimación (Ver resultado 5).
De esta manera se puedfóencontrar el mejor conjunto de mediciones para
lograr buenos resultados en la estimación, sin embargo habrá que
disponer de una redundancia adecuada para poder detectar y eliminar
datos erróneos que pudieren existir en un conjunto de muestras.
CASO 3.- Estimación con 80 mediciones combinadas
Ya que la capacidad de memoria ha sido restringida por el uso de ma_
trices, el número máximo de mediciones que se pueden simular en -el
programa es 80, por lo cual se realizará la ultima prueba con 80 me_
diciones.
Escogiendo un buen conjunto de mediciones se puede obtener una bue

195
na estimación, esto se muestra en el resultado del programa digital
(Resultado 6).
A partir de esta prueba se puede; ver que si se introducen .-errores
en la.s mediciones, el estimador es capaz de detectar pocos datos
erróneos ( máximo 5 valores erróneos, escogidos), ver resultados 7,8y9.
Esto se debe a que una redundancia de 0.6 es insuficiente para estj
mar el estado con la confianza requerida, sobre todo si se conside-
ra que el Sistema Nacional Interconectado en la actualidad es ra-
dial. En sistemas mallados, una redundancia de 0.6 es adecuada pe_
ro no suficiente.
En base a estas pruebas se puede concluir diciendo que el programa
digital de esta tesis puede servir para seleccionar un buen conjun-
to de mediciones para utilizar en estudios de Estimación de Estado
en un Centro de Control, aún más .si se realizan los cambios sugeri_
dos en el capitulo VI, ya que de esta manera se lograría optimizar
al programa para asi poder obtener la mejor herramienta para eva-
luar, supervisar y controlar el sistema (en tiempo real) desde el
Centro de Control.
Los resultados del programa digital se muestra a continuación:
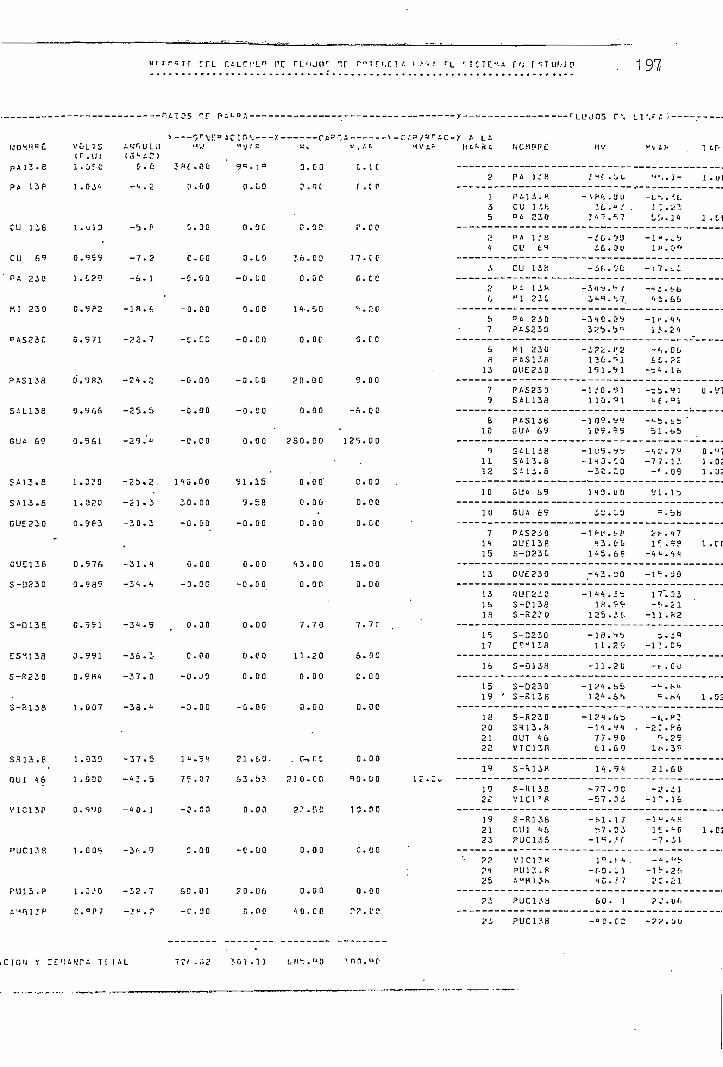
tj 0 H n K í- V O L T S< r . u )
SAL138 0 .966
GUE2ÍD 0 .9E3
S-R 136 1 .007
OUI 16 1.000
PU13.P 1 . ¿ ."• 0
ÜMr j i J f C . Q P 7
t J í i p o ' T r rrL CALC ' . ' L " re rLl'jtir "r r"in.ci/. '.";.- fL MÍ,H:U
A 'v* r, U L íl '< Vi " V •' P '-• v v ; •'• *• M V A - ]í A "• fí A
U ' - A T )
J35
A
2
7
ñ13
' • ' 7
9
810
1112
10
10
7
15
13
13' ' ' • 16
1.1
17
16
1519
18202122
19
19
19
2123
25
:. A r '; r "- 1 uf
HCHPPE
P A 1 _' H
P A 1 3 . MCU 1 '.h
CL' fc^
CU 13Ü
P ¿ 1 3 f*u i 23 C
Pt 230
MI 22íi
Í1UEPÍO
P A S 2 3 3 -
P¿S13«GUA 69
SiLliB
S A 1 3 . 5
G U A 69
GUA £«?
P A S 2 Í QOUE13SS-D236
OUE23Q
S-D136
S-3230
S-ülifJ
S-D230' S-R138
S-R230St lS . f tOUT 16V I C 1 3 R
S-ÍÍ13H
?-fU33V 1 C 1 J P
S-R138GUI 16
R U C I A S
V I C 1 ' K
PU17..Í
PUCUB
PUC13H
"' . 197
HU v v ¿ f . . T AP
* " í . j L. '•',.)- 1 . u t
-'.f-A, . -JU -£.->. ',L
7 f- ' . *i 7 ^ :, . 1 A 1 , C t
- ¿ 6 . 0 U - 1 » * v V»
• -M..5C -17. ,t
-3 'l •?. '- / -4 ¿.«-6juq.^v li.65
"M?:" "!í:í!1 3 1 . r- 1 £ C . ? 2191 .^1 --i.U
-1Í0.91 -tb.^1 0 -VI110.^1 "£ .°i
-109. y*í -"-b.bb 'í 09 .95 51 .65
-113.00 -77.13 1 .Oí-3C . :c -r. . os i . y;
na.üu vi .ib
jy.ia =.bB
-lí-L'.frf 2 f - - l 7lo.»* c> i . . *? . i.ri
.-«.30 - l - r .50
-111.it; 17". j i
125. 't - J l . f tS
11.20 - 3 ! . C ^
-11.20 -c . Cu
"í^:" "-:!;; i .os-11.41 . -íK.fó
7 7 . 9 0 r- . 2 5ti .69 lt> . 39
11.94 21 .60
- 7 7 - 9 C -^ f .31-57 .03 -17.16
-61.1 7 -1W.1H^ 7 , D 3 lí.hp 1.0!
-m.- ' f -7.31
- í -O . - l -1^.2f=i c . í 7 ? c . ;• i
6 0 . 1 ? J . U f)
- "C . C 2 -22 . JU
S C I O N Y CE'UNTA U 1 AL 7 r f - .i '¿ ?• D í - 1 3 Í-- H í: . r* O ', fl R . " f
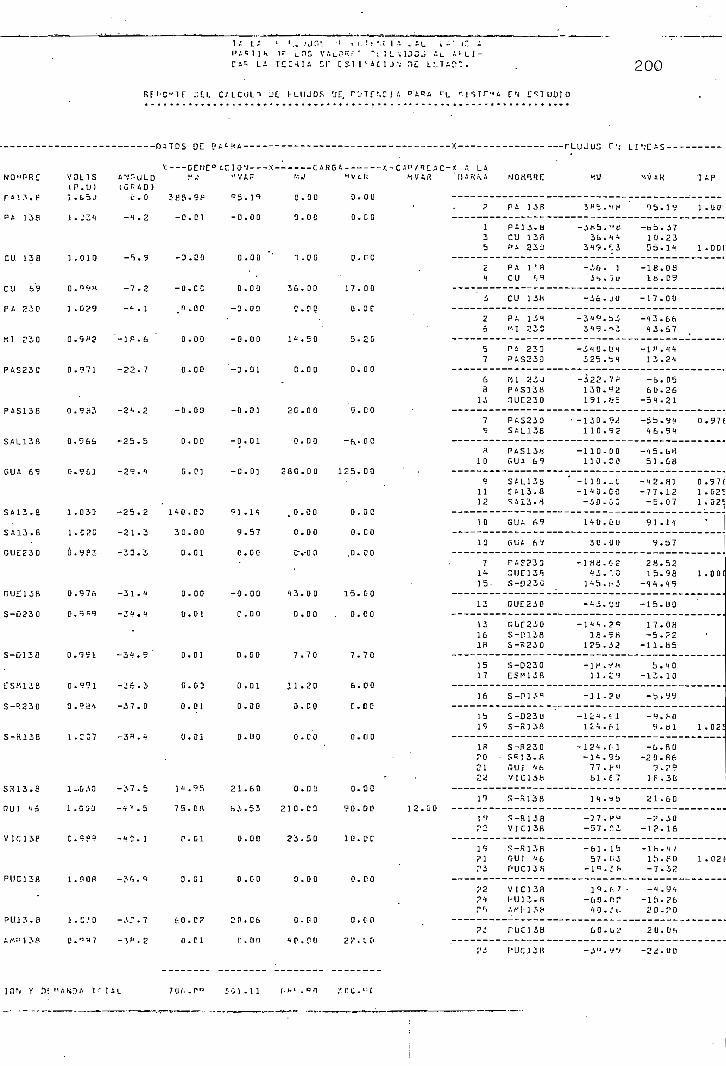
C l* LA T E C H 1 A CT C S 1 I V * C 1 J.'i n¿. L ^ T A O " .
R F ' - C " 1 F 3E.L C/LC'Jtn JE. [ -LUJOS rJE. P'j 1 f r. C í í. P'A«fl f't M I T T M A fM u o i o
w o i| r- R E:
p A 1 3 • B
CU. 138
CU 69
PA 230
MI 230
PAS230 '
P A S 1 3 8
SAL138
GUA 69
S A13 . B
El S K 1 3 8
SR13 .8
V IC1 3P
X CCWC 0 ACIO'i X C A R G A X- C ¿P/ * L A C - X A LAV O L T S A ' j r -uLO "»f " V A P '-'W *n'£l; MVAÍ Í 'UAíUA( P . U ) ( G R A D )
13b
21
' 2á
5
7
&8
13
79
H
10
9
". ' . 1112
10
10
714
15-
13
131618
1517
16
Ib19
1P
?0
2 tí
11
Tí-i
n r
WM*t
PA 1.ÍS
P A 1 ¿.. b
CU 13fip¿ 23 ií
PA !'•«CU í,*»
CU liíi
PA 13BMI 230
Pi 2:0P A S 2 3 D
KI 23 UPí.5138
T U E 2 3 0
PAS23D
SAL138
PAS13HGUA b9
S A L 1 3 3E A J 3 . 8
GUA fr9
nuA ^y
S-D23G
O U C 2 A O
S-P138S - F 2 3 Q
S-D230
S-P13"
S-D23U
S-B23DS R 3 3 . fiTvUI 4b
V i c i a»
S-R13B
S -R 1 ,1 8V 1 C 1 3 R
S -R 1 3 RfiUI "6r-ucisfi
V 1 C 1 3 H
ruri 38
PUC13H
K'J
3 f •; . M H
319ÍÍJ
-A6- 131!. iu
-J&- JÜ
349 .^i
-3'1Ü.L'4325. rsl
- 3 2 2 . 7 P
130. «21 9 1 . fe £
• -130. 9¿110.92
-110.00110.20
-110. Lt- 1 4 0 . C fl-30. o:
1 4 0 . i! U
3 G . U O
4 7- * u
- 1 3 . 'J Ü
-1*1.?*»
16- SR
- 1 f . í<
-l 1 - ?u
-li« .« 1
-121 .M-14.95
77. f^61 .í 7
11. ,b
-77.P"-57 . ^¿
-61 - Ib57. (¡3
1 9 . !-. i •
40.. '».
Ü 0 . U 2
-.V?. v'í
95.19
-bb.3710.2355.14
-18.08
-17. OÜ
-43.664 3 . 6 7
-1Í-.44
13.24
-6.056 0 . 2 6
- 5 4 - 2 1
,-5b.944 6 . 9 4
-45. &H51.C-B
-77.12-5.07
91 .14
y. 57
2H.5215.98
- 4 4 . 4 9
-15. UO
17. OH-S.?2
-11. H5
5.40-13.10
-b .yy-4.f-.fl
9. oí
-íí.BÜ-20.86
1F.3Ü
'¿1.60
-12-16
-lh.17Ih.PB-7.32
-i ,yi- !& .?£*
y o - ? o
20 . Uf,
-2 ¿.U U
T A P
1 .UOI
1 .001
0.97í
0 . 9 7 ^
1 .02^1 .025
•
1 . O O Í
1.02:
1 .02*
Y n; i f 7 AL 7 0 í - - p " i - i i . n f - » - ' . « n ?.r.c.*-i
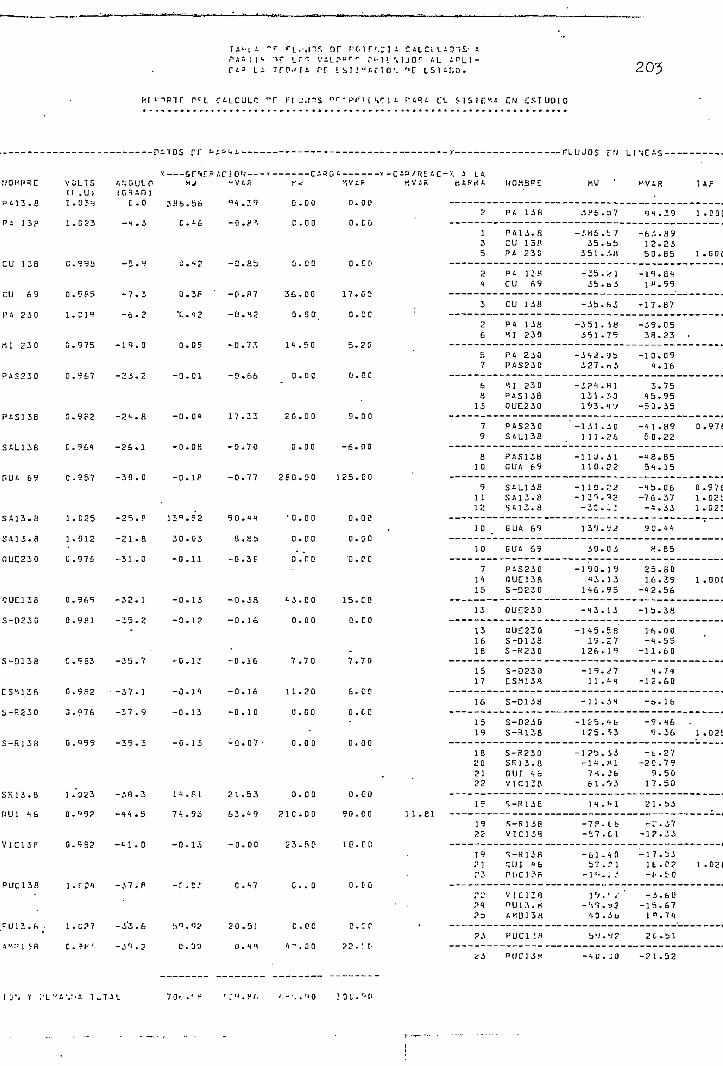
•
< r .u)P A 1 3 . E 1 .039
P A 3 3 p 1 .023
CU 138 C.99Í)
CU 69 0 .9P5
PA 230 1.C19
MI 230 G.975
P A S 2 2 0 G.9S7
P A S 1 3 8 Q.9F2
SAL136 C.961
R Ú A 69 C.357
SA13 .8 1 .G25
SA13.8 1.012
CJUC230 C.976
QUE128 0 .969
S-D23D 0 .9?1
S-D138 C.9S3
ES-u.12ft C . 9 8 2
S - R 2 3 Q 0.976
S-R138 G.^99
SR13.B 1/023
f)Ul 16 0-°9?
V I C 1 3 P 0 .9=2
PUC13R 1 .r?1
-Ul?..í> ; 1 .C?7
p A 3 i | K -ir L c t v~i?vr ri-ii \ i j o f AL A P L I -C A D LÍ T c n - M A cr E S T I ^ B C I O * . ^E. L S T M Í Q .
hf í:ifJir: nrL C A L C U L A : T FI. -jjns n r< frit '*r l A P A ^ A L"L SlSl f - t
A .'.' G U L 0 M J » V A íi ," « 1 V A P « V A S ti A R ti A( G R A O )
2
135
2
3
26
57
6H
13
79 '
810
93112
10
7
15
13
131618
1517
16
1519
18;ío2122
1?
Pl
-33.6 S^.'fí; 2 0 . 5 ] C . C C C.'f • - -
CW E S T U D I O
MOMSPE
PA 13H
PA13 .8CU 13BP A 23C
P A 1 í HCU 69
CU 138
PA 138«I 230
PA 230P A S 2 3 0
MI 230PAS138GUC230
P A S 2 3 0SAL138
PAS13HGUA 69
S A L 1 3 8S A 1 3 . 8SA13.S
GUA 69
GUA 69
P A S 2 2 0
S-D220
OUr220
GUC230
S-H230
S - D 2 3 QESM13«
S-D138
S-D230S-R138
S-R230S R 1 3 . 8QUI laV 1 C 1 3 &
S-R13B
S-R13BV 1 C 1 3 9
S - K J 3 Sf:ui ifc
"U13.fi
PUC3 !H
MV
3 P 5 . b 7
-.'•H&.t 735. bb
351. .'.li
"":^-35.63
-351. i*351 .79
3 27 . rj 3
1 3 1 . 1'. D1 íi 3 . i y
' -131 - 2 0111.26
-11U.31110.22
-11 3.; ?.¿
129.^
3Ü. 03
-190.1913.13
116.95
-13.13
19.27126. 19
-19. ¿113 .¿1
-11.34
- 1 £ & . t &125. =53
-11. Hl7 ri . J 66 1 . rí 3
11. f l
-7P. C b- Í7 .C1
-fal .10
IV.' t
10 . 3 ü
b-K,?
203
9 4 . 2 9
-63. H912.235 0 . 8 5
-19.811^.59
-17.87
-39.053 8 . 2 3
-10.091.16
3.75
15.95-53.35
-1 1.89
50.22
-«8.8551.15
-Ib. 06-76.37-1.33
90.11
H . 8 5
2 5 . 8 016.39
-12.56
-Ib. 3 8
16 .00-1.55
-11.60
•i . 7l- 3 2 . 6 0
-b.l b
-9.169 . 3 6
-i:. 27-20 .79
9 .50
17.50
2 3 . b 3
-L-.37
-17. b3l t - 0 2
-3 .60-15.67
20 .51
T A P
1 . 0 0 £
1 , G D £
Q . 9 7 Í
0 .97E
1.D2E1.C25
1 .00 (
1 .02:
1 .021
- ' t u . ' J O - 2 1 . 5 2
70r; .'•- ' J M . V Í . Í . - - . .MO J O L . 1 " ' !

hAHRt ? C = I - - - * OLUA = -4,1n a o K A :'• r = i - -c : :ILLT¿ = -s.9B A K P A i C = l ) - Q 50 ' D t L T A s -7.1H A W P t r- C = 1 .0?" ' O E L T A = -Í..2U A K K A * f> f = .0 .9 Í Í2 D T L T A s - J H . 7[ j A R f c A 7 C = 0.171 • O C L T A =-22.7f i A R H A 8 C - O . ^ P J D E L T A = -24 .3 o ,-H A R R A «t r = Q.^b D E L T A =-25.b ¿(JOU A M R A 1 G C = O."ül D E L T A =-29.5
11 L" = 1 .030 D E L T A =-?5.3. E = l.UPO DELTA =-21.1
r = 0.903 . D E L T A =-30.3C = 0.c '76 ' D E L T A =-31.5f = 0."!"? • O T L T A = -3'l .5E = O.«"?0 . O C L T A = 0.7E = O. c^0 . ' DELTA = -0.8C = Q.SM D E L T A =-37.1E ~ 1.007 DELTA =-38.5E = 1.03D DELTA =-37.6
É Í A R R A 2 1 C = 1 .000 D E L T A =-13.6Q A R R A ? 2 E = Ü.9P9 DELTA =-40.2P A R R A 2 3 E = L O O P D C L T A =-37.0LiAFRA?4 E = 1-030 • OCLTA =-32.8B A R R A 2 5 E = 0 .9B7 , D E L T A =-38.3
ITERACIÓN NUM.
T A B L A DE C O M P A R A C I Ó N DC D A T O S Y CALCULO DEL ERROR
E R R O R ( X )1 i 1 38í;.9999 385.9991 0 . 0 02 2 1 • 95.1900 95.1913 O . & O3 1 2 3 36.4300 36.4344 0.01
0 . 0 015 n 3 4 i e. a 9 DO i t i . u y s t 0 . 0 36 3 3 ?. - 3 E - . G O O G -35.9957 ' 0 ,017 3 n 3 - 2 6 . 0 0 0 0 -36 .0002 ' 0 . 0 0
O .'O 6O . G O0 . 0 0O . U O
10
1112 2 6 5 -340 .0901 -340.0873 0 . 3 0U 4 & 5 - - 1 8 . 4 4 0 9 -18.4401 - 0 , 0 0
- - - - 0 , 0 0
1516 O . G O
0 . 0 0
1319
170 .010 . 0 0O . C G
2122 0 . 0 0
23 i 11 l ^ t . D U O D I H U . U U U H 0 . 0 0O . G OD . O O
250 . 0 0
28
464748195051
51
5"
E D I C I O N E S DE V O L T A J E l5> ESTÁN EN I P . U ) LAS
T I P O12i443343A
15434i
43nl121212343u123
434
34j
412343412124/,341212t,C,
<J'•,1.Si.
M O D O P112233A45556(,
7788on
B101011111212*131-31313141415151515161617171819IB1819192020212122222323242*.2525
fi111?15y o21P-Í,
N O D O Q
33423
. 366
55 •6&99eB
77
1515
131318I B17171616
151522
. 22
I1?232?22
V A L O P M E D I D O2f?í ; .9 999
95.1 90036.43001 0 . 2 3 0 01 £. 0 9 D O
. - 3 E - . G G G G- 2 6 . 0 0 0 0-17.0000249 .569943.6600
G . O O O O-340 .0901
- 1 8 . 4 4 0 9- 3 2 2 . S 2 U 1
- b . Q & Q O11C. 9 100
46 .9100-11 ti. 0 0 0 0
-45.6500- 2 P . D O O O
- 2 P C . O D 0 1-124 .9900
1 4 & . 0 0 0 0' 91 .15GO
30. Q. 0005.5800
-1E8.690028 .4"70G
1 4 5 . 6 9 0 0•rl 4. 4 4-00-43. 0 0 0 0-15.0000
- 1 4 4 . 3 4 0 017.0300
125.3500-11.82001 1.2900
-13.0500-11.2000
- 6 . 0 0 0 00 . 0 0 0 0C . O O O O
- 1 2 4 . 6 4 0 0-9.8400b 1.6 9 001 P . 3 9 G O1 4 .940021 .6100
-134.9300- ? b . 4 7 0 0- I R . 4 B D O
-7.31001 9. f. 3 00-4.9500f C . O O O OP 0 . 0 6 0 G
-1 0 .0 000-?2. 0 0 DO
P - 9 H 2 P1 .07 ,001. G 2 3 00. 'í 8901 . 0 3 0 0l . O O O C1- Q ? - O D
R E S T A N T E S EN VAL
V A L O R C A L C U L A D O385.9991
95.191336.434410.229718.0954
-35.9957-36 .0002-16.9905.349.572443.6594
0 . 0 0 0 9-340.0873
-18.4401- 2 2 2 . & 2 0 7
-6.0620110.9148
4 6 . 9 0 9 6-109 .9942
-45.&512-19.5597
-280 .0010-124.9896
1 4 0 . 0 0 0 491.15033 0 . 0 0 0 0
9.579B-188.6926
2 8 . 4 6 0 5145.6833-44.4372- 4 3 . 0 0 0 0-14.9998
-144 .347217.0260
125.3485-11.8116
11.2616-13.0413-11.1695
-6.C1030 . 0 0 1 0
-0.0051-124.6419
-9.8378b l . 6 9 0 b18.3903
'14.940721.b8b2
-134.9305-26.4713-18.4829-7.31031 9 . G 3 0 &-4 .947559 .yy982 D . O & 1 3
-4 0 . 0 0 0 2-21.9998
0.^161 .OÍ 001 . L i Ü O QU . ' f H b ' J1 . U i O l1 . J U G O1 . O i O O
O.C3
2g 3 13 15 • 1 1 b . 6 y o u i t a . baoo 0 . 0 030 A 1 3 1 5 . . T 4 4 . 4 4 D O -44.4372 ' 0.0131 i 14 - 4 3 . 0 0 0 0 ' - 4 3 . 0 0 0 0 0 . 0 0
•32 2 14 -15.0000 -14.9998 G . O O33 3 15 13 - 1 4 4 . 3 4 0 0 -144 .3472 0 . 0 0
0 . 0 20 . 0 0
360.25
380.27
í,Q q 17 16 ' - 6 . Ü U D U -b .U lUO • 0.17
0 . 0 0í,¿ 2 19 C . O O O O -0.0051 G . O Dt,3 ' 3 IB 15 - 1 2 4 . 6 4 0 0 -124.6419 0 . 0 0
O . G 20. 000 . 0 00 . 0 00.110 . 0 0G . O O0 . 0 2
52 4 22 23 -7.3100 -7.3103 0 . 0 00 . 0 0O*. O 5
55 ! 21 F C . O O O O 59 .yy98 O . U O0.01O . G O0 . 0 00 .04
f t l 5 1 1 1 .07 ,00 1 . D Í Ü O O . Ü Ql)3 >j i? . 1 . G S 3 0 l . ü l ' a o 0 . 0 0
• " • . 0 . 0 1bO0 . 0 00 . 0 0

CAP LA T E O R U DE E S T I MA CI O N DE E S T A D O .
R E P D R T C D £ L . C A L C U L O DC FLUJOS DE P Q 7 F f \ C I A P A R A tL S I S T E M A CN E S T U D I O
NOMPRE
S AL13B
SA13 .8
S A13 . 8
QUE230
GUE138
S-D230
S-0138
ESM13B
S-R230
S-R138
SR13.8
OUI 46
V 1 C 1 3 S
PUC1 33
PU13.8
AMí ' 338
•
• V O L T S ÁNGULO ' HU H V A R H'-J ' M V A R<P.U) ( G ñ A D )
1.000 -43.6 75.07 63.53 . 21.0_DO 9 0 . 0 0
f . V A R . B A R R A
2
13
. 5
2
- 3
26
•: 57
68
13
79
810-
91112
10
10
71415
13
131618
1517
16
15 "19
18202122
19
1922
1921
2224
' 25
23
23
NOMBRE
PA 138
P A 1 3 . BCU 138PA 230
PA 138CU 69
CU 13S
PA 138MI 230
PA 230P A S 2 3 0
KI 230PAS138•OUE230
P A S 2 3 0SAL138
PAS138RÚA 69
SAL138SA13.8S A 3 3 . 8
GUA 69
GUA 69
P A S 2 3 0QUE138S-D230
QUE230
QUE230S-DL38S-R230
S-D230ESM138
S-D13B
S-D230S-R138
'S-R230SR13.8OUI 46VIC138
S-R138
S-R138VIC138
S-R13BOUI 46PUC13ÍÍ
V IC138PU13.BAMB138
PUC138
PUC13B
MU
3 f l 6 . G O
-3H6.0U36.43
349. 5H
-36.0036 . DU
-36 .00
• -349 . 583 4 9 . 5 7
- 3 4 0 . 0 9325. 5K
-322.82130.92191.93
-130.92110.91
-109.99110.00
-110.00-140.00
-30. C C
1 4 0 . 0 0
3 Ü . O D
-188.694 3 . 0 0
145.68
- 4 3 . 0 0
-144.35=1234.3
125.35
12b4.3411.26
-11.1 7
-124.64124 .64
-124 .64-14 .94
77.90
1 4 - 9 4
-77.90-57.03
-61-1757.03
-19.34
19.63-60 .00
4 0 . 3 7
60 . U O
- 4 0 . 0 0
207
M V A R
9b.iy
-64 . B9- 10.23
-34-70
-17.911 tí . 1 0
-16.99
46 .2043 .66
-18.4413.25
-6.0660.25
-54.15
-55.94^46.91
-45.6551.64
-42.78-77.13
-5.08
91.15
9.58
28 .4615.98
-44 .44
-15.00
17.03393 .65-11. '81
399. H£-13.04
-8.01
9.65
. -6.84-20.84
^ .30
. 1IU39
21.59
-2.31-12.16
-1B.4B15.80-7.31
-15.2620.21
2 U . U 6
-22 .00
T A P
1 . O O C
l .ODC
-
0 . 9 7 6
0 ,97£
i. 02;1.02S
l . O O C
1.02Í
1.02!
ION Y DfM/.NDA T O T A L 7 0 6 . 1 0 1095.17 6 H 5 . 9 0 3 - 0 0 . 9 0

T r
T T O R I A D E E S T J A C I Ó N
208
EN ESTA PARTE SIMULAREMOS FL FUNCIONAMIENTO DE LATEORÍA DE L5TIKACION f« UN CENTRO HE. CONTROL. LAHISPÍA -OUE CONSISTE EN PROCESAR UV CONJUNTO DE ME-DICIONES REDUNDANTES (TO^AO/S EN TIEMPO REAL) DEL"SlSTf.'lA, ELIMINANDO LAS flECJCJONES ERRÓNEAS HASTAOBTENER EL MEJOR ESTIMADO DE- LAS VARIABLES DE ES-TADO DEL S.E.P.
TABLA DE VALORES MEDIDOS DEL SISTEMA P A R A E V A L U A R
MEDIC.1
4567fln
3 81312
153617IBI1?2"'21222324?52627262 .303132333435363738
40M
1546474fi/j O
505152535455565758*?50SI626361
CL ESTADD HEL MISMO HEDÍANTE EL USO
ESTIMACIÓN DE ESTADO.
TIPO DE MEDIC-.POTENCIA A C T I V A EN. LA B A R R APOTEN". R E A C T I V A £N LA BARRAFLUJ3 DE POTENCIA A C T I V A 'ENFLUJO DE POTEN. REACTIVA ENFLUJO DE POTFN. REACTIVA EN^LUJO DE POTENCIA ACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE. POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLL'JO DE POTEN. REACTIVA ENPOTENCIA ACTIVA EN LA BARRACLUJO DE POTENCIA ACTIVA ENCLUJC DE PDTE\'. REACTIVA. ENFLUJO DE POTENCIA ACTIVA ENFLUJO Df POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENrLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA £%'FLUJO DE POTEN- REACTIVA ENPOTENCIA ACTIVA EN LA GARRAPOTENCIA ACTIVA EN LA. BARRAPOTE*. REACTIVA EN LA BAD.R.APOTENCIA ACTIVA EN LA B A R R APOTES. REACTIVA EN LA BARRAPOTENCIA ACTIVA EM LA BARRAPOTEN. REACTIVA EN LA fíA<?RAFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN- REACTIVA ENFLUJC DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA ENDOTEVCIA ACTIVA EN LA P A R R APOTE\'. REACTIVA EN LA B A R R AFLUJO DE POTENCIA ACTIVA EMFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN, REACTIVA ENFLUJO QE POTENCIA ACTIVA EVFLUJO DE POTE\'. REACTIVA ENFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTEN. REACTIVA ENPOTENCIA ACTIVA EN LA BARRAPOTE\'. REACTIVA EN LA PARRAFLUJ3 DE PATENCIA ACTIVA EMFLUJO DE POTEN. REACTIVA ENFLUJO DE POTENCIA ACTIVA EN •^LUJO DE POTEN.' R E A C T I V A EWPDTE'íClA ACTIVA F"J LA P.ARRAPOTE^. R E A C T I V A EN LA D A R R ApoTfflcift ACTIVA EN LA BARRA"OTf.V. RFACTIVA EN LA P A R R AFLUJ3 DE POTEN. REACTIVA EfJFLUJO OT PQTFTv. REACTIVA ENCLUJO DE POTcNCU ACTIVA ENFLUJO r.r PflTFN. R E A C T I V A FU°OTE\'Cli ACTIVA EN LA P.ARRA.POTEN. R E A C T I V A CM UA RAIIAPOTENCIA ACTIVA EN LA BARRAPDTr\'. R E A C T I V A CN LA B A R R AVOLT-SJF FM LA PARRA ........VOLTiJF EN LA fí A» » A ........VOLTAJE rw LA «AURAvo'TA^'f r\ LA RA^RAVOLTAJE FV LA, PARRA •VOLT/iJF f;j LA n A R R A
FPir«CIA A C I J V ü TM L A P A R U A"nrrv. pfAfTiva EV Lí IÍARRA
l• 322i24ü
55R6£>77£R99e
10101111121213131313141415151515161S1717ifi!?IPIPiy!•?20202121?2?223?'l?"?<•reí?
£,
] 1
IP
1 520? 1?1151^
- 3 •3
- 4 ••- 2- 3- 3 .- 6- 6
- 5- 5- 6 •- 6- 9- 9 '- 8 .- 8
- 7- 7 .- 15- 15
- 13- Í3- 1 8 ,- 1 ñ- 17 •- 37- 16- 16
- 15- 15- ?.z :- 22
- 1 9- 23- 22- 22 '
DE LA TEORÍA DE
VALOR IP.U.J"3.86000.9519
• 0.36430.1023O.lfi09
-0.3600-0.3600-0.17003.49570.4366O.ODQO
-3.4009-0.1844-3.2282-0.06061.10910.4691
-1.1000-0.4565-0.2000-2.8000-1.24991.40000.91150.30000.0958
. -1.88690.2847
. 1.4569-0."444-0.4300-0.1500-1 .44340.17031.2535-0.11820.1129
-0.1305-0.1120 '-0.06000.00000.0000
-1 .2464-0*098*G.61690.18390.14940.2161
-1 .3493-0.2647-O.lflt 8-0.07310.1963
-0.04T50 .'6 0 2 00.2006-0.4000-0.22000.^8201 .03001 .02000 . 9fl9 01 .03001 .00003.03000.00000.0000
STANDARD1.001 .00l.OD1.001.001.001.001 .001.001.001.001 .001.001.001.001 .001.001 .00"1.00.00.00.00.00,00.00
1.001.00 ..00,00.00,00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00
3 .001.001.001.001 .001 .001 .001.001.001 .00l.OD1 .001 .001 .001 .001 .001.001 -001 .001 .O'J3 .00
UA IO\'CIOl- I.'L i. r\- LA r S T I " A C I O N o. o o n
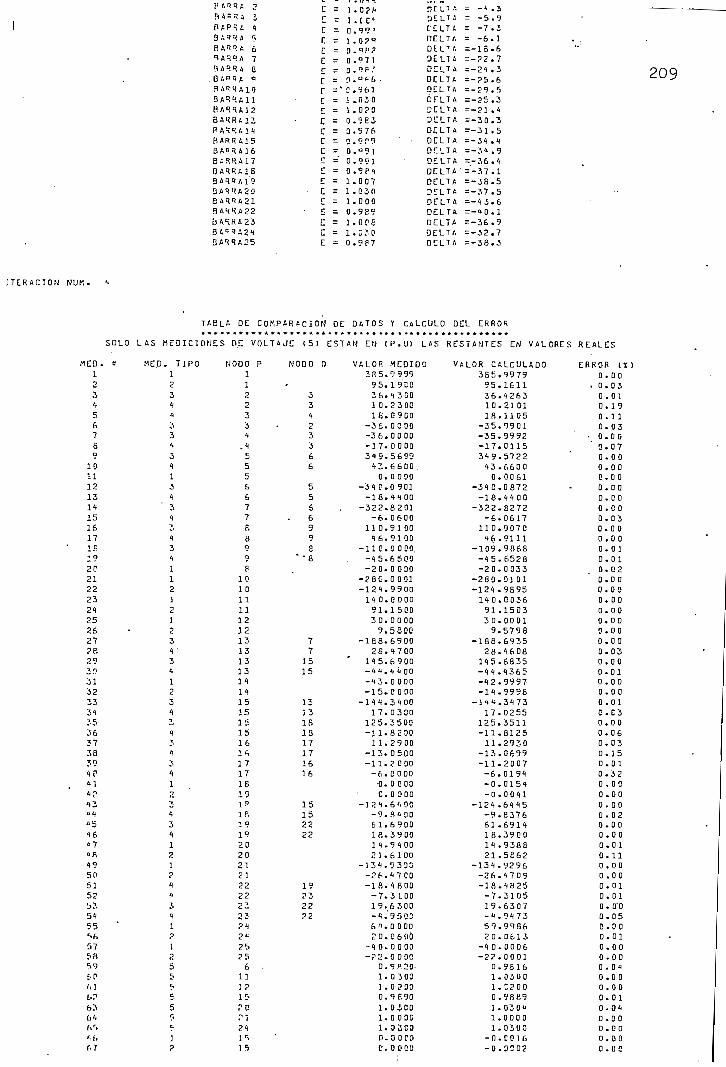
9 A S íi A "j
BAtRA 6^A°.D.A 7ri A R 1 A 8
3 AIRA 11HARRA12BARR¿13RAS RAÍ 4BA R R Á I SBA"Rft 16B A R R A 17B A R R Á I S8 A R S A 1 9BARKA20
H A K R A 2 2Í J A R R A 2 33Ac t í ¿243ARRA25
L - I . l( 1 1
E = 1 . . 0 ? hE ~ 1 . C E1"C - 0.99*r = i .o?11E = 0 . *" f ?E = 0 . ° 7 1r = o."!1?r = :> .o^b -f ='2.961r = 1.Í130r - 1.020 .
E = 0.9E3C = 0.976E = 0 .9T9E = 0.°9]C =' 0.991r = 0.9P4E = 1.007E = 1 .QSfir = 1.000E = 0.989E = i.oceE = 1.C3PE = 0.987
¡)E LT .'. = -* -2Dr LI- = -5.9
• CELTA = -7. iDELTA = -6.1DELT A =-1 S .6DELTA = -?¿ .7DELTA =-24.3DELTA =-?5.6DELTA =-29.5DELTA =-25.3DELTA =-21.4DELTA =-30.3DELTA =-31.5DELTA =-34.4.DTLTA =-3*. 9DELTA =-36.4DELTA/ =-37.1DELTA =-38.5nrLTA =-37.5DELTA =-43.6DELTA =-«0.1DELTA =-36.9DELTA =-32.7DELTA =-38.3
209
ITERA C I Ó N NUH.
T A B L A D E C O M P A R A C I Ó N D E D A T O S Y C A L C U L O D E L E R R O R
S O L O LAS M E D I C I O N E S DE V O L T A J E (5 ) E S T Á N E N ( P . U) LAS
M E O . » M E D . T I P O .1 12 23 34 45 "6 37 36 49 3
10 411 112 313 414 ' 315 416 317 4IB 31? 420 121 122 223 124 225 126 227 32P. 4 '29 3i n í)
31 132 233 334 435 3?6 «37 33fi 439 34? 4"1 l4? 2
43 3ílí. í)
"5 346 4«7 1i« 249 150 ?51 452 *53 354 455 ' 1->f, ?57 15fl 259 5£•0 5M 5t.^ 563 5£,'< 5•**•> *'.f. ]f.7 P
N O D O P N O D O 0119 ~*tC. ~J
2 -1J
3 43 - 24 3/i •*.4 - o=; íiD D
5 fb
6 5t t;fa .17 £T (^1 • O
fi 98 Q
-Q Q. CQ " " ft, Q
P
10101111121213 713 713 1513 15141415 1315 1315 I B15 1316 171 L. 1 ~li n I /
17 16; 17 16
1819I» 15Ifl 1519 2219 222020212122 1922 ?323 2223 22? 42 ^2525
61 13 ?3 520P i241 *>1 5
V A L O R M E D I D O3R5.9999
95. 1 90036.4300 .1 0 .23001B.Q90D
-36 .0000-36 .0000-17. 0 000315.5699
43.6600 ;0. 0 000
-34C.O 901-18.44 00
-322.8201-6.0600
110.91004 6 . 9 1 Q O .
-11 0. 0000,-45.6500-20-0 000
- 2 8 0 * 0 0 0 1-124 .9900
140,0 0009 1. 1 50030.0000
9 . 5 S O O-188.6900
2 8 . 4 7 0 0145.6900-u<i. 44 00-43.0 000- 1 5 . C O O O
- 1 4 4 . 3 4 0 017.0300
125.3500-11.8200
1 1 . 2 9 0 0-13.0500-11.2000
-6.0000•Q. 0 G 00C. 0 000
- 1 2 4 . 6 4 0 0-9. 8*0061.69001P..39DO1 4 . 9 4 002 3 . 6 1 0 0
-134 .9300-26.4 7 C O-18.4800
-7.31001 9.6300-4.' 9 5 006 <). 0 0002 0 . 0 6 0 0
-4 0.0000-?2- 0 0 0 0
0.9 R20>1 .03001 .03000.9 P. 901 . 0 ¿001 . 0 0001.3 ¿00n. a oroC. 0 O C O
R E S T A N T E S E N V A L O R E S R E A L E S
V A L O R C A L C U L A D O385.9979
95.161136.426310.2101IB. 11C5
-35.9901-35.9992-17.0115349 .5722
4 3 . 6 6 0 00 .0061
-340.0872-18.4400
-322.8272-6.0617
110.907046.9111
-109.9868-45.6528-20.0033
-280.0101-124.9895
140.003691.150330.0001
9.5798-188.6935
28 .4608145.6835-44 .4365-42.9997-14.9998
-144.347317.0255
125.3511-11.8125
11.2930-13.0699-11.2007-6.0194-0.0154-0.0041
-124 . 6445-9.E37661.691418.390014.938821.5S62
-134.9296-26 .4709-1B.4B25
-7.310519.6307- 4 . 9 4 7 35 n . 9^862 0 . 0 6 1 3
-40-0006- 2 2 . 0 0 0 1
0.9S161 .03001 . C 2 0 00 . 9 R H 91 .03041 . 0 0 0 0i .sitio
- 0 . E 0 1 6- 0 . 3 C 0 2
E R R O R ( X JO . Q O
. 0 . 030.010.190.110 . 0 3
• O . O D0 .070 . 0 00 . 0 00 . 0 00.000 . 0 00.000 . 0 30.000 . 0 00.010.010 . 0 20 . 0 00 . 0 0O . Q O0 . 0 0O . Q O0 . 0 00.000.030.000 .010.000 . 0 00.01O . C 30 . 0 00 .060 .030.150 .010.32O . D C0.000 . 0 00.020 . 0 00.000 , 0 10.110 . 0 00 . 0 00.010 .010.0*00 .050.300.010.000 . 0 00.01O . O D0 .000 . 0 1D . 0 40 . 0 00 . 0 00. OG0 .130
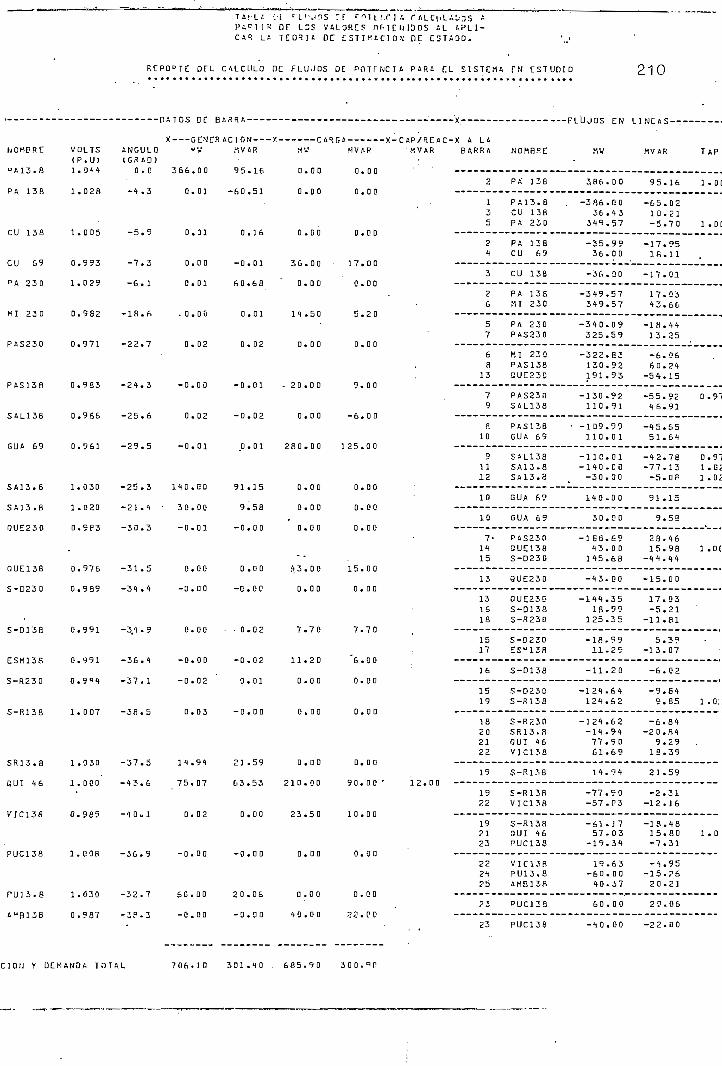
T A t - L í C - E í'L'MnS rr raUr.r|/i r ALC | i L ¿Las f i
P¿«MIH of ¡_'JS V A L O f í C ? nr-inilDOS AL M'LI-C A R L¿ TE 03 j A OC £ S T I t f t C ] Q \ DÉ C S T A D O . '..'
REPONTE: DTL C A L C U L O DC FLUJOS DE n o T F N c i A P A R A CL S I S T E M A EN E S T U D I O
N O M B R E
PA13.8
PA 13B
CU 138
CU 69
PA 2 3 0
MI 230
P A S 2 3 0
P A S 1 3 B
SAL138
GUA 69
S A 1 3 . 8
SA13.B
QUE230
QUE138
S-0230
S-D13H
ESM13B
S - R 2 3 0
S-R138
SR13.8
HUÍ 46
VTC13B
PUC138
PU13.8
ÍMB138
X G E N E R A C I Ó N X- C A R R A X-V O L T S Á N G U L O «PJ K V A R . MU HVA.R.(P.U) ( G R A O )1.044 0. D 386.00 9 5 . 1.& 0 .00 . 0.00
1.028 -4.3 C.01 -60.51 . 0 . 0 0 0 . 0 0
1.005 -5*9 0.01 0.16 0 . 0 0 . 0 . - O Q
0 . 9 8 2 -18.fi . 0 . 0 0 0.01 11.50 5.20
0.971 -22.7 0 . 0 2 0 . 0 2 0 . 0 0 0 . 0 0
0.983 -2*. 3 -0 .00 -0,01 - 2 0 . 0 0 ' 9 . 0 0
0.966 -25.6 0 .02 -0 .02 0 . 0 0 . -6.00
0.961 -29.5 -0.01 0.01 2 8 0 . 0 0 125.00
1.030 -25.3 I<t0.0f l 91.15 0 . 0 0 0 . 0 0
1.020 -21.4 • 3 0 . 0 0 9.58 0 .00 0 . 0 0
0.976 -31.5 . 0.00 0.00 í(3.00 15.00
0 . 9 8 9 -3^.4 -0 .00 - G . O C 0 . 0 0 0 .00
0.991 -3.f.9 0 . 0 0 • - 0 . 0 2 7.70 7.70
0.991 -36.4 -0 .00 -0 .02 11.20 /6 . 0 0
C . 9 ^ 4 -37.1 -0 .02 0.01 0 . 0 0 0 . 0 0
1.007 -38.5 0 . 0 3 -0 .00 0 . 0 0 0 . 0 0
1.030 -37.5 14.94 ¿1.59 0 . 0 0 0 . 0 0
1.000 -43.6 75.07 63.53 210.00 9 0 . 0 0 '
1.008 -36.9 - 0 . 0 0 -0 .00 0 . 0 0 0 . 0 0
1.030 - 32 .7 & G . O O 2 0 . 0 6 D . Q O O . D D
0 . 9 H 7 -3P.3 - C . O O - D . O O 4 0 . 0 0 22. PP
C A P / R E A C - X A LA• K V A R B A R R A
?.
' . . 135
24
3
2; • • &
5: • 7
6fl
13
79
a10
Q
11
12
10
10
7-1415
13
131618
15
i 1"?
'. 16
1519
18202122
I9
1922
19?l23
222425
"23
210
NOMBRE:
PA 138
P A 1 3 . BCU 138
. PA 230
PA 138CU 69
CU 138
PA 138MI 230
PA 230PAS230
MI 23GP A S 138GUE23C
P A S 2 3 0SAL13B
PAS15BGUA 69
SAL138SA13.8SA13.8
GUA 69
GUA &9
PAS230QUE138S-D23D
OUE230
OUE23C-S-D138S-H230
S-D230£TSW138
S-D138
S-D230S-R13B
S-R230SR13.8QUI 4&VIC138
S-R138
S-R13BVIC138
S-R13BGUI 46PUC133
VIC13BPU13.8AMBl iB
PUC13B
PUC138
MU K V A R
386 .00
. - 3 8 6 . 0 036.43
343.57
-25.9?36.00
-36.00
-349.57349.57
- 3 4 0 . 0 9325.59
-322.83130.92191.93
-130.92110.91
• -109.99110.01
-110.01-140. C O
-3 O . D D
142.00
30.00
-168.694 3 . 0 0
145.68
-43 - G O
-144.3518-99
125.35
-18.9911.29
-11.20
-124.64124. 62
-124.62-14.94
77.9061.69
14.94
-77.90-57. P3
- 6 1 - 3 757.03
-19.34
19.63-60 .00
40.37
6 0 . 0 0
-10.00
95.16
-65.0210.21-5.70
-17.95lfi.ll
-17.01
17.0343. &&
-lfi.4413.25
-6.Q660.24
-54.15
-55.9246.91
-45.6551.64
-f2.78-77-13-5.0P
91 .15
9.53
23 .4615.98
-44 .44
-15.00
17.03-5.21
-11.81
5.39
-13.07
-6.02
-9.649.85
-£ .84-20. R4
9 .29
18.39
21.59
-2.21-12.16
-18.4815.80-7.31
-4.95-15. ?6
20 .21
2 C . 0 6
-22 .00
T A P
1 .00
1.00
0.97
0.91
i -G;1.02
1 .OE
i.o;
1.0
ACIÓN Y DEMANDA T O T A L 706.1(1 301 .4 O 6 8 5 . S O

r.*j E S T A P A R T E smiLAREMor n FUN: ioMAu, r r 'JTo DE LAT F . O W I A DC F S T T M A r i o n FN UN cFfmo DI. C O V T R O L . LA".I'-'ÍA nur C O I Í F I S T C FN ppoc r r - ^ 1 » w CONJUNTO DE HE-íHnnncn R C D U ' m A t j T E S ( T O C H A S tr\O READ-DELSIST'T 'A. F.L1'MNAND3 LAS 'TP 1C ! ON'ES H U R O N E A S H A S T Aomrvcn FL ME:JOB ESTIMADO DI; LAS VARIARLES .DE ES-TADO DCL S.E.P.
211
TABLA OE VALORE? MEDIDOS DEL SISTEMA P A R A E V A L U A R
MEDTC.
121314
17IB1920212223242526272 a2°30313233343530373R3940
45466 7
50515252545556575fi5 .6r61
666768
7P717?77747r-.7f-777P7"r,n
FL FSTADO HFL H1PMO MEO I Mil i. -F. L USO
FSTI"ACIOM OE ESTADO.
TIPO DE MEDIC.POTENCIA A C T I V A EN LA B A R R A0OTrN. P C A C T 1 V A EN LA B A R R A°0TEMC 1A ArijVA EN LA PARRAPLUJO or. POTEN. REACTIVA ENFLUJO DF POTENCIA ACTIVA ENFLUJO DE POTF.N. REACTIVA ENOQTFNCU A C T I V A EN LA B A R R A°CTF'J. RFACTIVA FN LA 2ARRAFLUJO DF POTEM. RFACTIVA ENFLUJO DE POTENCIA ACTIVA FN5LUJO DE POTE\'CIfi ACTIVA ENPOTENCIA ACTIVA EN LA BARRACLUJO DE POTEN. REACTIVA ENFLUJO DE POTFA'CIA ACTIVA ENPOTENCIA ACTIVA EN LA BARRAr-LUJC DE POTENCIA ACTIVA EN^LUJQ DE DQTE\'CIA ACTIVA E\FLUJO DE POTE'J. REACTIVA ENPOTENCIA A C T I V A EN LA B A R R APOTEN. REACTIVA EN LA B A R R APOTENCIA ACTIVA EN LA B A R R Aí»0TEV. REACTIVA E\ LA B A R R A°OTEMCIA ACTIVA EN LA BARRAPOTEN. P.EACTÍVA EN LA BARRA^LUJO DE POTENCIA ACTIVA ENFLUJO D£ POTEN. REACTIVA ENPOTENCIA ACTIVA EN LA B A R R At=OTF\'. RFACTIVA FN LA BARRAFLUJO DE POTENCIA ACTIVA ENFLUJO DE POTF.N. REACTIVA CNDOTENCIA AC T I V A EN LA B A R R AFLUJO DE POTEN. REACTIVA ENPOTEVC1A ACTIVA FN LA BARRAPOTEV. R E A C T I V A EN LA BARRAFLUJO DE POTENCIA ACTIVA ENFLUJO D£ POTEN. REACTIVA ENPOTENCIA ACTIVA T.M LA BARRAPDTE^. RE A C T I V A EN LA BARRAantrtizib ACTTVí- EN LA BARRAPOTFN. REACTIVA EN LA B A R R APOTENCIA ACTIVA EN LA BARRA=H7EN. PFACTIVA EN LA B A R R ACLUJO DE POTENCIA ACTIVA ENrLUJO DE POTENCIA ACTIVA EN^LUJO OE POTENCIA ACTIVA EN'CLUJO DE PCTFN'. REACTIVA E<VPOTFNCIA A C T I V A F.N LA B A R R APOTE'J. RFACT1.VA EN LA 3ARRAPONENCIA ACTIVA EN LA " P A R R APOTEN. REACTIVA EN LA B A R R APOTE^CIA ACTIVA EN LA B A R R A"ÍITENCIA A C T I V A EN LA B A R R A-OTN'CIA ACTJVA E\ .LA 3ARRAPOTENCIA ACT;VA EN LA 9A.RRAPOTENCIA ACTIVA EN LA BARRAPO.TFN . REACTIVA EW LA BACRA-QTE\C1A ACTIVA F\ LA BARRAPOTENCIA ACTIVA EN LA B A R R APOTENCIA ACTIVA E\ LA BARRA«OTEN. REACTIVA EN LA BA R R AP2TF.N'. R T A C T J V A EN LA B A R R APOTN. REAC T I V A EN LA BARRAPOTEN.. "TACTIVA EN LA SARRAPOTF.N. FFACTIVA EN L¿ BARRA^OTFN. RFACTIVA EN LA B A R R AP0TFN. ^ÍACTJVA EN LA PARRArlUJO Df POTENCIA ACTIVA ENFLUJO or poTrM. RE A C T I V A ENFLUJO OF POTEN. R E A C T I V A ENrL'JJQ DF POTFM. RFACTIVA ENrLUJQ CE POTfN' . R E A C T I V A E\CLUJO DC POTFNrjA A C T I V A ENPOTF^CIA ACTIVA rt>] LA [?ARRArLUJO nr POTfKciA A C T I V A ENrLUJO ÜF fOTT-J. "EACTJVA FNFLIMO OF P(?T. \'C I A A C T I V A ENCL','JC1 nr pO tT \'C 1 !•• AC 7 1 V A F Mf L u j P n r P o t r \ . n r A c f i v A E \
VOLTriJ' F^ I A 'IAOPA...
112233i,4556677PBa
9101C1111121213131"lü
1515161617171PIP191 °2C202121222222"e 1
?1
2*25?5152313o
1 Q
1?
7527
231 Do
2F.
IP15
f-P
722 216r?1 i>153 01 qi i
1 C11
- 3- 4- 2
- 6- 6- 7
- 13- 13
— Q
- 8- &
- 15- 7
- 1S- 13
- 17
- 15- 15
- 1 9- 23- 24- 25
.
- 7 '- 7
9- 19- 2 4- 17 '
- 1 3- 1 H- 1 2- ? }- \»
'OE LA' TEORÍA DE
VALOR <P.U.J3.86100.9519Ó. 00000.10230.3600--0.1806-0.3600-0.17000.43663.49573.2559-0.1450-0.54161 .9191
-0-20001.1091
-1 .0999-0.456S-2.8000-1.25001.40000.91150.30000.095B1.4568
. 0.2347-0.4300-0.15001 ,25360.1703
-0.0770-0.1309-0,1120-0,0600-1.2465-0 .05340.0000.0.00000.14940.2160
-1 .3493-0-2647-0.6117-0.1936-0.60010.20210.60010.2006
-0.4000-0.22000.00000.00000.0000O.OODOO.OQQO0.00000.00000.00000.0000Q.DOOOQ.OOOQo.oooo0 .0600
-0.0002Q.ODOO0.0000
-i -ea&a0.13240.46^1
-0-134H-0.15260.1129-0.2350-1 .1435-0.114?-0 .30000.7790
-0 . 444 «0 . n f-. 1 01 .0300
STANDARD1 .001.001.001 .001.001.001.001.00
0000000000
1.00DOGO0000DO0000
1.001.001.00
1.001.001.021.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.00.03.00.GO.00
1.0000000000000000
1.001 .00
000000.0000000000DO00DOOG
1.1.1.1.1,1.1,1.1.1.1.1.1.00

PAM1P ?E L."c VALC is f í r - 1 r •; |j OS AL fiPUC A » LA T r O = ; i £ DC E S 7 I " A C 3 0 \L C S 7 A D O ,
RFrOPTr IHL CALCULO Vt FLUJOS DF: P07Í'-,CI¿ P A R * ÍL S ISTFMA f \ T.S7UDIO
NOMBRE
S-0138
S-R230
S-R13B
SR13 . 8
GUI 4 6
.PU13 . 8
A w n 1 3 8
V O L T S A 'OGULO MU M V ¿ R KU «v¿f -< P . U > < G R ¿ 0 )
v, V A R P A R R A
2
135
" 4
3
26
S7
" 6fl
13
79
P,
91112
10
10
71415
13
131618
1517
16
1519
18202122
19
19?2
192123
2224
P3
23
NOKPPC '
PA 138
CU 138P A 2 3 0
PA 138CU 69
CU 138
PA ]3flHI 23 C
PA 230PAS230
MI 230
PAS138GUE230
P A S 2 3 0SAL138
PAS138GUA 69
SAL13SSA13.8
SA13.8
GUA 69
GUA 69
P A S 2 3 0GUET13B5-0233
O U E 2 3 0
"UE23QS-D138S - R 2 3 0
S-D230ESH138
S-D138
S-D230' S-R138
S - R 2 3 0
SR13.EOUI 46VIC13?.
S-R138
S-R13PV1C138
S-R13ROUI 46PUC13B
VIC138PU13.8
P U C 1 3 S
P U C 3 3 8
HU
3S6 .10
-3P6.1036.5.1
349 .58
-36.08. 3 6 . 0 0
. - 3 6 . 0 0
-345.583 4 9 . 5 7
—3 4 Q . 0 9
325.59
-322.83130.91191.91
-1 30.91110.91
-ioq.99109.99
-109.99-140. DO
-30 .00
1 4 0 . 0 0
3 Q . O O
-188.684 3 . 0 0
145. 6B
- 4 3 . 0 0
-144.3418. 99
1 25 .2 6
-18.9911.29
-11.20
-124.65124.65
-124.65-14.94
77.^061.69
14.°*
-77. «0-57. r:
-e-i .1757.03
-19.36
19.65- 6 0 . 0 1
4 0 . 3 6
60. Cl
-40. 00
<- i >
KV¿F
9 5 . 2 0
-65.3510.2255.13
-18.0618.09
-17.00
-43.6443 .66
-lfi.3913.24
-6.0460.20
-54.15
-55.8846.91
-45.65 '51.66
- ^2 .79-77.13
-5.08
91.15
9.58
2B.48
15.98-44 .43
-15.00
17:04-5.22
-11.81
5.40-13.09
-6.00
-9.839.84
-6.E2-20.86
°.30
21.60
-2.31-12.16
-18.4815.00-7.30
-4.^5-15.26
20.21
2 0 . 0 6
-22. 00
7 AP
1 .00
1 .00
0.97
0.971.021.05
l .OE
1 ,D¡
. 1.0
S C 1 0 N Y D E M A N D A 7 0 T A L 7 T £, . 1 O 301 .27

S O L O "
< E D . a12 •3/.5&7o9 .
i: .11i?1314151517IR192??12223?425.-£27?fi2°T r-
3 1??317-4357-ft7.77ji7.0í¡"
6 3i?¿ 7
¿S
45
46¿7Ú R
' üa
5"1
5152535455565-75fi5Q
60616263646566S76K6?7?71
72T*-747-
7¿.7778
T
L A S M E D I C I O
uro. T J P O12T.
434 .124 '3
. 3143133412151u
34
123114123412]21
3334
121?112.i
5.p.1i12222 •22231¡í.t\
313'f7i34
A F L * HE CO^
M E S D E V O L T A
N O D O P1122T
34ti
556 •67-78o-
. o
o
101011ir1212 •13131414151516161717IR *
• 181915202,0212122222323242*2525182313
Q
I D15
7521
- 2319
O
2r
is •13" 6 ".
o
22.23 '16221515 .101917-
¿ R A C I Ó N - ?n O A T C : v C A L C U L O
.!£ (5 ) E S T Á N Ef ' í ( P . U ) LAS
N O D O 0 V A L O R C E D I D O3 H 6. 0 9 99
C5. 1 9 20P . 0 0 00
3 10 .23004 3 6 . 9 D C D2 -1P. 2609 '
-3 L. 00 00-17. 3 0 C Q
6 43.66006 3*9.56997 ' 325 .5900
-1 4 . 5 0 Q Q17. -54.1 5 Q O13 . 191.9100
- 2 0 . 0 0 0 0'? 110.9130
H -1 0 9 . 9 9 0 0P- — 4 5 . 5 5 ^ 0
" . -280. 0 001-125.0 Q Q Q
1 4 0 - 0 0 0 31 .0300
30. 0 0 0 09 .5800 '
15 1 4 5 . 6 8 0 07 2?. 4 7 0 0
- 4 3 . 0 0 0 0-15 .3000
18 125.360013 17 .0300
-7 .700017. -13.0900
-11.2000-6. 0 0 0 0
15 -124 -650325 ' -5 .3400
• o .o 0:0C. 0 0 0 0
1 f¡ , 131 íl p O
2 1 . 5 0 0 0-134. 9'3 0
-26.470019 ' -61. 1-70023 -19.360024 . - f t n . O l O O25 2 C . 2 1 0 0
6 0 . 0 1 0 02 0 . O f i f l Q
-40. 0 0 0 0 .' .*22. C G O O
0 . 0 0 0 0o .oóooC. 0 O Q C
o.o ooo0.96100 . 0 0 0 00 . 0 0 0 00- 0 0000.0 000c . o o o o0. 0 O Q O0. 0 0006 . . 0 0 Q Q
- P . G 2 Q Oo. c a o oC . 0 0 9 0
. 7 .-1F8. 6§007 . 1 3 - 2 4 0 0Q . 46.^103
ln - 1 P . 4 S O O24 -15.260017 11.290C
' - 2 7 . 5 0 0 013 -144. 3^201P -11.520012 . - 3 C . O Q C O .21 7 7 . 9 0 3 0 -15 -4 4 . 1 1 oo
C E L E R R O R
R E S I S T E S E N V A L O R E S
V A L O R C A L C U L A D O3 H 6 . 0 9 9 4
95.15600 . 0 0 1 4
1 0 . 2 2 0 23 6 . 0 0 0 4
-18.0642-35.9999-17 .000043.65*4
349.5738325.5870-14 .4935-54.1482191.9111-19.9962110.9116
-109.9895- 4 5 . 6 5 0 7
-279.9963-125.0034
1 4 0 . 0 0 4 51.0298
3 0 . 0 0 2 49.5763
145.680728.4834
-42 .9962- 1 5 . G 0 0 2125.3589
17.0371-7 .699H
-13.0875-11.19R6
-5 .9974-124.6524
-9.-S2970 . 0 0 2 1
- O . C O O O14.9420 •2 1 . 6 0 G 9
-134 .9287-26.4696-51.1693-19.3600-60 .0106
. 2 0 . 2 1 0 36 0 . 0 1 0 92 0 . 0 6 0 9
-39.9982-21.9992
0 . 0 0 1 9" 0.0013
0 . 0 0 3 30 . 0 0 5 2Q.96130 . 0 0 0 50 . 0 0 4 00.00130.00140 . 0 0 2 2
- 0 . 0 0 0 1-0.0000
5.9980-0.0117
0 . Q 0 6 P, .0. 0 0 3 2
-188.676513.24104 6 . 9 0 9 4
-18.4785-15.2592•11.. 29 13
-23 .4980-144 ,3445-11.8091- 3 0 . 0 0 2 3
77.8989'- 4 4 . 4 3 4 4
R E A L E S
E R R O R ( K )o . o o 216o . c iO . Q O0 . 1 0O . Q O
" O . G 2O . C OO . Q O0*01
• o . c oO . G O0 . 0 40 .020 . 0 00 . 0 2o .oo0. O C0 . 3 0o.oc0 . 0 0o . o o0 . 0 2
1 ' 0 .010 . 0 40 . 0 0C . C 50 . 0 10 . 0 00 .000 . 0 40 . 0 00 : 0 20 .010 . 0 40 . 0 00.1 CO . D O0 . 0 00.010 . 0 0O . G O0 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00.0-00 . 0 0O . Q O
0 . 0 0 '0 .030 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 . 0 00 .000 . 0 3
41.620 . 0 00 . 0 00 . 0 00 .01O . Q O0 . 0 1O. 'O l0 .010.010 . 0 00 . 0 90 .01
• o . o o0 . ° 1

,OHPRE
P.'. = 7] t í -ir Lr.< V A L * 1 - * " rM fM-OS ¿L ¿^LI -C f t R LA "¡TOMA "T CS71 u tC ! 3'»' ?E: ESTiDü.
nrrn°T PCL C A L C U L O cr FLUJOS' r-c p n r c c i A PA°Í. CL SIST^
x crfifR ACIÓN x C A P P A >: -CA°/RE:AC-.V A L AV O L T S A M 0 U L 0 M V _ H V ¿ R f 'V KVf i^ i M. V A R b A R R A
2
135
2
3
6
5
7
6P
13
79'
• . g
10
Q
1332
ID
ID
71415
3 3
13
16
• 13
15:7
16
151.9
1P
?1• ' -. - ' . ?2
1 9?2
19Pl
22
't EN ESTUIJJ
NOHB1L'
P A 1 3P
P A 3 3 . R' CU 13B
P A 233
CU 69
CU 13H
p A 1 3 a" I 233
PA 230P A S 2 3 G
MI 23 Ü .PAS13EÍOUE23S
PÍS230S A L Í 3 8
P A S 1 3 SG U 4 69
SAL Í I 8SA13.8SA13.8
GIIA 59
GUA &9
P A S 2 3 0RUET13BS-0230
RUE230
S-D138S-R230
S-D23D
S-D17-P
'S-0230S-R138
5^13.8OUI *6V 1 C 1 3 R
S -R 1 3 8
V IC13H
OUT 46
v i r i ;, HPU13.3
P.,riMi
0
«V
3 P 6 . 1 0
-?R6.1036.51
349.58
36. OC
-36.00
2 4 9 . 5 7
- 3 4 D . 0 9325. b9
-322 .^31 3 G . 91191.91
110.93
109.99
- 1 4 D . 0 0-•3 o . c o
1 4 0 . 0 0
3 0 . 0 0
-IflS.fcíi43. O D
1*5. fre
-43. Q O
-144 .3418.99
125 .26
11 .29
-11.20
- 3 2 4 . f.5124 .65
-124 .65
77 .9061.69
1 4 . " f
-77. 9G
-ti - 1 757- Ü3
- 1 9 . ? f -
i*í.rs- ü O - C ' l
ft 0 . " 1
217
• 9 5 . 2 0
• -65.3510.2255.13 '
-1S.06IB. 09
-17.00
-43.6443 .55
-18.3913.24
-6. 0460 .20
-54.15
-55.884 6 . 9 3
-45.6551.65
-42.79-77.14-5.D7
91 .17
q.58
2 E . 4 815.98
- 4 4 . 4 3
-15.00
17,04-5.22
-11.81
5. 4 0-13.09
-6.00
-9. 839.84
• - f - .S2-20. 86
9.301H.39
2 3 . 6 0
-2.31-12.16
-18.481 5 . f 0-7.30
- 4 . 9 5
20.21
P O . O f j
T A P
1 . D D C
l . O O C
-
0 .?7É
0 ,?7£1 .025i .ras
1 . D D O
1 .OPS
1 .02f
- 4 0 . 0 0
701 - 11 i . ? 7 /-. e s^ . ° o

¿* IQC T/1GI
z'o ' T
,50- T
ion ' r
1 2 0 * I\Z1" lJib' 0
;¿b' o
D G G - T
3 0 0 ' T
dVl
Q C * í¿-
•Jú' ¿JC
1 2 - C S
OE' i-o u * •; r9 n ' e t —
9 I - 2 T -
t£ '¿-
C*' IE
6'i " o I
98'02-
"Jt3 * b —
0 G ' v -
?!-'r"G Ó - I T -c a - s -
00-51-
«v ' 32
tí5 * 6
¿t ' la
¿Ü'S-
61/2*-
59-57-
H9:«-
si •!»';-b fC9
b e * 7. i
S 9 • £ 7-79.-T*,-
Q C ' i t -
6 G • y l90-ri t-
V t -«iSG C • r. T
OS " jL,
1 77U 6 G
c . - o ^ - K£t jn . i
U -ú-3 oZTJ l t . i
1 - J'J- K-Ct l l i
7" -¿s gi/ inc/ E • i1^- 9na-^
7 ^ • 15- tí£t3 [ Aí,~*'LL- tí?T«-á
'i-i * vi H't i y- j
ü^ -¿¿ 9-7 i na
: -t-izi acin-sM'^' iztlT- OCSO-ü
0 ? * T T - tí 1 1 0 - i
tin'tíl- 322U-Ü
6r» *ü t 'd£TG-¿"í í ' t í^t- 02S3IHI
C ü - t » - OE2Jn6
K Í " « * T - f f « s 5 a
0 _ ' O C u 9 9 H ' J
-•. -cu ¿y tfnu
C J ' O b T - 9 ' C l v S^j b ' 6 ü T - ñ EIH v y
fiá'bGi . 61J vnab b - b O T - g tTS ' /d
ló 'OIT 9CI1VS
t s ' C t I tí i 1 S 7 ai. - ' z ¿ i - e ? e i A-
t; * 5 S V S i* £ S V J•) /: • 0 V <T - ÍJ Y ¿ Ve:
íi'&tí. ÜÍ2 En
• 3 ^ ' b i/ í - d i t 7d
Oú ' 97- ~¡Í T MJ
Oj-5 ' , - t.9 113
y n " & t U 7 í! V o
V-^í. Bíl 7J
nW D H s J W O ' J
i r.j scrmj
luHiij ,1 7
12bt
bi
«l.
51 - .
51 '
¿1
6T91í T
El '
' 17 l
úl •
O T
¿lti -b . '
CI9
b¿ .
2 ly9
¡_
•a
y
*;
6
V >i t¡ V y ü T r", , 4 (J 7 A h í ' l •• y 7 A Vi .«, Vi
71 5 / - O v j f c / d í j - í V S d í J -•. NOl DV HJFl jO X
* C G V l S ! J J i _ ' K C I j 7 í i í i S " l J3i3 7 I *• L ~ I. ~"1 -73
•
(07 aO) ( 1* j )oin::;iv s L T O A
'"

r*J C3T.S rT*":MÍ. r:
I t E - T Q DE ti
*»r C;>MROL. LA
r«t , rL !'MV..'.':DO LAS ME " K 1 n'.T *¡ E R R Ó N E A S H A S T A-.ro fL ".CJTB cs'U'unc SE. L A S V A R U D L C S DE: ES-
DCL S.E.P.222
DE V A L O R A ^EDÍODE PfL S 1STE ".¿ P A R A E V A L U A R
K E O I C .1
5&78q
I D '111213141516171319
2 02122
252627?82?3 Q513?3Í
M
/i ¡,
"5"&
57585°
Í.7
7C71
7"
ri ¡ Mf.no ncL -IJSKO «E:U
miI-ACIOÑ SE fSTA3a.
~n"o nr "-EDIC.POTENCIA ACTIVA EN LA RA a RAPOT\'. R E A C T I V A EN -'-A D A P R A°OTVCU ACTIVA £\A B A R R A •rLliJO nc POTEN. R E A C T I V A ENFLUJO DE: POTEVCIA ACTIVA EN'FLUJO DE POTEN. R E A C T I V A EN°3TEVCI A ACTIVA EN1 LA P A R R ADCT-\. REACTIVA EN LA BARRATLUjn DE POTf.N. R E A C T I V A FÍIFLUJO D^ POTENCIA ACTIVA E N'CLUJO OE' 'POTENCIA ACTIVA ENOOTFA'CIA ACTIVA fN LA P A R R ACLI'JO DE DOTEIN. R E A C T I V A EN^L'JJO DE PGTENTIA ACTIVA ENPOTENCIA ACTIVA EN LA PARRAFLUJO OE POTENCIA ¿CTIVA ENPLVJJO DE" POTENCIA ACTIVA ENCLI'JO OE POTEV. R E A C T I V A EN'POTE-JCI6 ACTIVA EN LA 3 A R R APOTEN'. R E A C T I V A CM LA ?ARRAPONENCIA ACT T V A E-N' LA B A R R ADOTEN. REACTIVA EPí LA PARRAPOTENCIA ACTTVA EN LA B A R R A°0*E\'. REACTIVA EN1 LA PARRAFLUJO DE POTENCIA ACl'lVA ENFLUJO 2E POTEN. PCACTIVA ENPOTENCIA ACTIVA E-M LA P A R R A= C7L.Y. REACTIVA EN1 LA PAP.RAFLUJ; DE POT.MCIA ACTIVA ENFLUJO nr PCTTN. R E A C T I V A ENcOTfVClA ACTIVA FM LA PARIRÁFU'JJC Í>C BQ~EM. R E A C T I V A ENP:-TEMCIA ACTIVA rv LA RARRAPOJEN1. Pf AC TIVA E\ LA n.AR.RAFLUJO DE POTENCIA ACTIVA EN^LL'JO DE POTEN'. REACTIVA EN'= GTE'JCIA iCTIVA FN LA P A R R A --'CTr\ R E A C T I V A EN LA ? A R R AOOTVCIA ACTIVA F\ LA PARRAPOT^N. REACTIVA EN LA PARRAPOTEVC1A fiC'IVA EN1 LA ?APRA= OTE\*. PEACTIVA EN LA BARRArLUJC Or. POTEWCI.fi A'CTIVA EMFLUJC CT POTENCIA AC'IVA ENCLUJO DF POTENCIA -ACTIVA ENFLUJO DE PO'EN. R E A C Y 1 V A ENDOTE"JCIA ACTIVA I7N LA ?ARRtPOTEV. REACTIVA E.N LA B A R R APQTEN'CI.A ACTIVA CM LA °ARRAPOTEN. REACTIVA EÍÍ LA B A R R A"OTEVCIA ACTIVA EN LA P A R R APOTEVC1A ACTIVA EN LA 3ARRA^O'EvciA ACT;VA cv LA S A R R A .PCTr\CIA ACTIVA EN LA PARRA"O^E'JCIA ACTIVA PN .LA "-ARRAD?TEN. REACTIVA EN* LA PARRAD0TEN'CIA A C T I V A EN LA 3ARRAC0'E\'CIA ACTIVA EN LA SAD.RAPOTCMCJA A C T I V A r.\A B A R R APCTCN. PTACTIVA EN LA S A R R A^CTT-;. TACTIVA EV LA BA^S;,P0"tft.'v R E A C T I V A LN' LA 3A°RAP^TN. RrAfTIVA rv LA PARRAa'»~=:v. REACTIVA EN LA BA^RAPOT^V. RCACTIVA F.-'J LA PARRAPOTM. RE A C T I V A F,\ LA P A R R At-'LUJO DF POTKC1A A C T I V A Er-lCLÍÍJO nr POTE'¿. «TACTIVA EN''-'LtíJ" Oí PfTr-v. D T A C M V A E NTL'JJO ^E POTEN. °FAC.tr/A rrjTL-UJO í? E POTEN. pj;,'*TTVft CNFLl'JO r*r "OTrMC ] i ,1 r T ] V A E V"OTT'fr I A A C T I V A TN L/ n A W R Acn'jr> nr PITECIA A C T I V A c«VLUJO nr pfiTr'g. S-EACUVA TN1 LVJ*1 ?•" ftP1!>;ri¿ ATI ¡VA í'í^ "Jr *jr POTf-;c]A ACT:VA CÑ'"Lvjp "r piiF".1. or^c'^^vA r N-
ii?2??/iíi55t.e.
17PP
9o
1 010111 1
¿21 2i i.1?; üi*115IbÍ&1 £.
17171PIfi19-* £5
2C2C?1?1?22CT "*
?32^i?ft?5?!1P.''J!3
=5
1 Dlc
7í-i7
?31 n3
?i-
1P1.-'£a
?!'T3\T?1'1S¿ ii n
i pi i
1 J
f TL USO Ht LA TCDR1 A DE
VÍ.LOR (P.U.)3.flfilOG.9519o.oaaa
- .3 D.1023f 0. 36002 '-0-1806
-0.3600-0.1700
- 6 0.43666 3.4«57
- -7 3.2559-0.1450
- 13 -0*5*16- 13 1.9191
-0.2000- 9 1 .1091- 8 -1.0999- 8 -0.4565
-2. 3000-1.25001.4000
-0.91150.30000.0958
- 15 1.1568- '7 0.2S47
-0.4300-0-1500
•- IB 1.2526- 13 0.1703
-0.0770- 17 -0.1309
-0.1120-0.0600
-15 -1*2465- 15 -0.0584
O.OOOQG. D O O O0 .119**0-2160-1.3493-0*2547
- 19 -0.6117- 23 ' . -0.1936- 24 ' -0*6001-•25 0.2021
0.60010.2006
-O.fOOO-0.2200O.C030Q . 0 000O.DOOO0.0000D.5000o.oooo0 . 0 9 Ü 0O.OCOO0.00000.00000.00003.0QOO0.0630-0.00023.00GO?.oooo
7 -i . es&fl7 0 . 1 321*
- ** ' a.if-91- 1 a -C * 1 4(1- 2 * -3.1.526- 1 7 0.1129
-T . 23^0- 1.'. -1.44,15- 1 í« - 3 . 1) n 2- i r -c.3f)r>o- .'' ! 'J . 7 7 •? S
n n t i fi" • ' r i ui .o1 na
D. S T A N D A R D1.001 .001.001 .001 .001*001*00
00D ODO00030000000303
1 .001 ,1.
.00• o c
1 * 0 01.031.001.031.001.001 .001.00
. 00
.00
.00
. D O,-QO.00..00.00> C 3.00.00
.00
1,00000000QO000000
0000
000000
1.00 .a.co1 .001111
000300D O
1.301 .031.001 .001.C31.001 .001 .00l . O C1 .001 .001 .003 .001 - 0 0i . oo1 .i!01 .03a .3:1 .00

'í, 3;
o
n
o
u
Jj
u.i)
u
¿'
.a
Ji
ut-
j-
i-
t-
t* i-
*o -
o j
'.i fj -j
•ji f ;-i 'J
•-
o
j: o
MI "
o 'o
ui
rn t
u *,c
'u
o
rs M
I ID
to
.o
jj
u u
» ~y
n ij
j>ji
n
u t¡
M a
M
.»
ii-
i-
í»
i> :
•!•:
• i-
i-
M
i-'
i--
*-*
»J t
-* i
->
i—
i—
a .TI
j)
,ij
a jj
^ ,
'J .«
_u
u .
uj-
1--
í»
i-
c-
r-
•'
lf,'
ll
II
lj
II
M
¡I
II
II
ií II
M
ll
' II
II
U
II
''II
II
II
II
II
U
'Q '
Oí
<
. 3 •
3 • i o
t-*
: 3 o
o o
' 3
13 '
3 «
:j u
^3
u o
i i u
«-i
o ra a
•;> o
m ,'i -
i ni n r
í n
rn j-i
j«
i -i c
i t*
\i fi ¡i ti rn
m m
n !i in
n n
r- t
- (-
n i- r
- r* e
r-
f- r
~ r
" r*
i- r
- r-
r-
r- n
r~
r~ r
~ i- r
r~
t.t-
>-
t-í>
i>t-
j>^
-í>
t«
i» r
» i»
.i*
j*
i» i
*
i'i-
i-j'
to'i
-.t
"
p: n
n r
jn
.-*
—I
(T
11 l/l
n u
t-4 O
a .J a n
.3 M
O t-
O
TJ
D ••
-
—
OÜ
*-
•
-: a
ti T
(X)
fV)
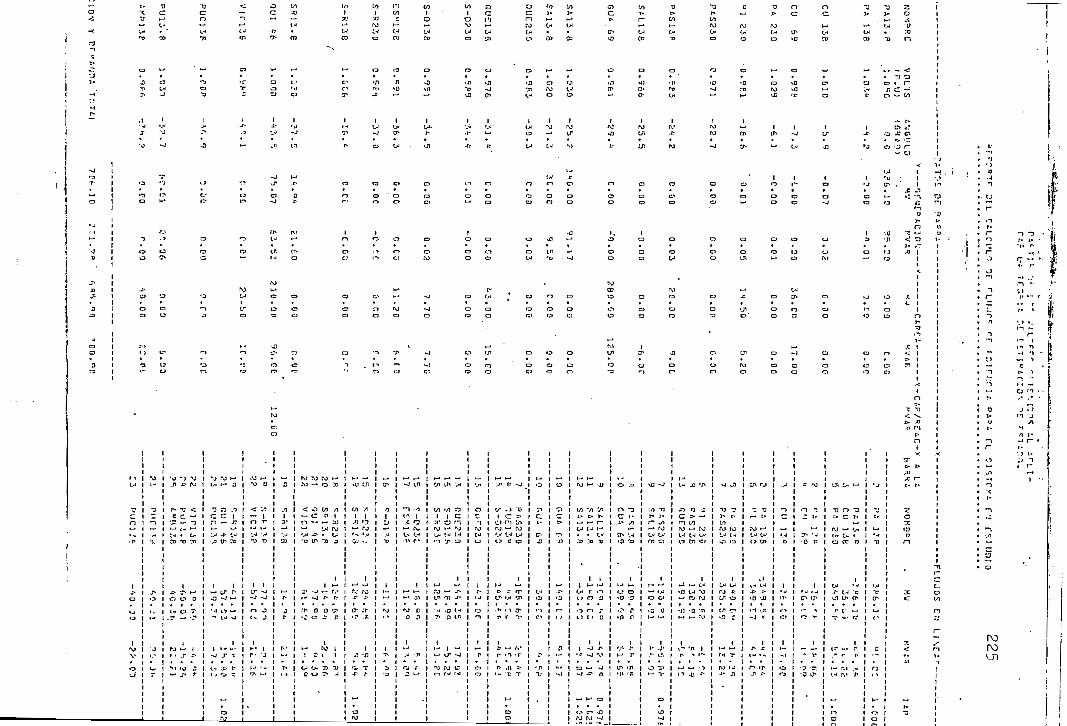
r.i
7 O ...
ir 1 .*• 0 u l V "o •_>•
V •3 ™ n s a y O > . •J 1.-
!_•
\ f) \
r- "5
<
c C
-—
*~
~>
t-j
• o.
CD "0
tD
1,U
3*
r--
0
O
D
;- u
i r
if.j u
)f
.r
r-
•>)
10
St- j, r
-.j
ro »
-•
73 Í3
.1
C C
]
n
— J
:
-.4
.E-
t-J
•jj tn
33
i t
— u
- r
O -J
-»
•-I O "
- (1
~I 1
1 l- l-
~l
J-
t:
í-
-X-
1-
" °
T
O
< n
— i
0 T
Í.-J
'.-1
ra u
I l
U*
•«J
-j -
j
n n
(~
J
1 '•«
1f
'J
7-.
i-».
1 1
"l 3'
•.J
l— fr J P I»1
u.
p ' *
ro w
fo
-•
< O
W vi
— C
« l
n —
3
)
•j-
JT
. C
-¡•D
ü>
1J
3 1
| u*
ji .j
i_i
r.\- -J
f
O
n^
fl a
T•r 'j
-i-
r
i^-
ÍO
l! 2 I I
íjj
ij,
» 3
JC
0
7»
-J
to :
n\ •"
1:J
tt '
jj.;-.. .. 1
^ u
Fi' fil
-r
-c
tí-
.T• r
.n i
a
-a
fí,
T
^ r
H.
O ^
. 1 u .J •o 1 I-* *"• fyj
•-.•• 1 a •3
"1
-1
tn |
í O
t.- '."
•i> r
- 1(-
» !-•
t-< .íl
'J C
•0 ;i
i u .J ..
11
o .r
j i-
>
'.n i
/)
73i
i e:
:>• o
ri
L-
'.i
W'•1 »
UJ 1
V-.
,.J
ro
— -
r-«.«
-s
-(••u
-n
("1-
n
in
i1-
|
V-
" U
- -í
^
W tí
n
fu i^
C Tl
C-J
u 1 f 1J '•J I P
Ct
o
M !-•
V .1
TJ
1 C
I>
Cl '1
M
'-•í
t-J líJ
tj
e a
1M
1-
J
C
.P
rp*•
" w ^
-í-
r )
(71
1 t.
-i (l-
f ,-l
.(-
I>
.(1 t
•-
-f T
t-1
O
. Ul n C i- CT
>, O
JO ••
> í1 • n T7
11 C t- T-
•ü .r- o t— i > O ^ V
.. -I
!-• !-•
(/)
'/I V
)
i*
& r
»>-j i-
r*V ^
tt
»
S3 »
1
[
1
M !-•
íj
r •-
)tj
c»
o
• ->
n
,~l)
E
l B
1 1
1 ~J
f
•"
-J V
ID
<-*
-J•J
-B
- -Q
!-• I-1 O
o
c-i
-nW
M
-J
O TI
C i-
.!> /)
^ 1
1J M
'.; o
>a 'fl
*p
r•n
n l
•ji
r-M
"I
I
y >
nni T
i/i
TI
t-
i-.r~
vO
ÍJ t-
en Q
I 1h-
< u
*-*
'^J
O O
•a
oI- K
. 1-Ir
.J'
-'•
<.;.
O "í
1t-'
f '^0 -j m
C
r- -^
n
m
tx í
^O
O
) '-' l
1-1 !-•
(.-J
•a t
-i )
•— r
a ru
•n -
B -n
1-1 *
-" - .
t o •
> i
P.
-, f.
,-i
WJ
0
n j)
*»
i)
731-
r-
W LJ (
-iO
O 1
ífj
CjJ
ro t
Ui
ID
(P T
-•a
r t
1 t
».(•
i r
M '•!
-t- íl
Í-.
t»
I-"
OJ
<5
Ut
,1Í.-
4 W
-fr
.t-
«D
-JJ
• i
-,n 1r-
fr
'" *
•*
r^
•.n
r-
n d í!j 'D 1 ' J
It-
r> lít 1
!-• -I
•a o
o i - i-
7* '
-J•0
H 1
I J I J
(r- i
r-.-
. ,
r; f 1
•-
v
•7
•=•
•a j>
'
'
-u
ní
t* C
r
(jí
L- •
o
ce -
r lC.
J •
^ 1
.J í
•j)
w
cr
r f
t-T - c 1
ir —
r.r r
r
•- f,I
.-t-
J rv
i r
n o
no
226
CONCLUSIONES
De acuerdo a las pruebas realizadas se puede decir que a medida que,
aumenta el grado de redundancia del conjunto de mediciones aumenta
también la capacidad del estimador de detectar y deshechar datos
erróneos. Por tanto se concluye que con un grado de redundancia -
por sobre el 60%, es posible-trabajar normalmente y obtener la 'me-
jor estimación de las variables de estado en un sistema eléctrico -> .
de Potencia. Sin embargo dependiendo del numero de mediciones que
se utilice para -evaluar,- supervisar y controlar el sistema, es ne_
cesario conocer los puntos críticos para incluir mayor redundancia
en esas áreas y de esta manera obtener una adecuada estimación.
Asi mismo, se debe conocer la calidad de la medición y su .influen-
cia en el estimado para enviar con precisión esta información al
sistema telemétrico, ya que no es prudente transportar un conjunto
de mediciones importantes por el mism.o canal de transmisión de da-
tos del sistema al Centro de Control» puesto que la salida de cuaj_
quiera de ellos acarrearía grandes 'problemas al estimador y conse-
cuentemente al operador del sistema.
CONDICIONANTES DE LA TEORÍA DE ESTIMACIÓN
- Utilizar el equipo de medición apropiado.
- Trabajar con un grado de redundancia adecuado, capaz de que se pue-
da: estimar él estado del sistema, aun en ausencia de mediciones
por falla en algún canal de transmisión de datos, así como detec

227
tar, identificar y deshechar datos erróneos provocados por falla
en el equipo de medición; y
•••í
- Utilizar las mejores mediciones para obtener la "mejor estima -
ción" de las variables del sistema,
En base a estos condicionantes .se pueden enunciar también algunas
limitaciones del método, asi:
- No utilizar excesivo equipo de baja calidad para obtener las me_
diciones del sistema.
- No utilizar un grado de redundancia inferior al 60% para estimar
las variables de estado* ni excesivamente grande (mayor que el
300%) puesto que el costo del equipo sería mayor, y por ültimo¿
- No utilizar gran cantidad de mediciones innecesarias (triviales)
de tal forma que disminuya la precisión o distorsione la solu -
ción de la mejor estimación, sino que se utilicen aquellas que
proporcionen la mayor y mejor información del estado del mismo.

228
4.4. DETERMINACIÓN DE LOS PARÁMETROS DE LA CURVA ENTRADA - SALIDA
DE ALGUNAS UNIDADES TÉRMICAS DEL S.N.I.
Se ha dicho que la función de Costo de Generación de cada unidad
térmica se define como una ecuación cuadrática, así:
!? +V PGi
La misma que puede determinarse experimentalmente, manteniendo la
generación de la unidad a un valor fijo determinado y midiendo el
consumo de combustible por hora correspondiente a esa generación . .
La medición de consumo de combustible se repite para distintos valo_
res de la generación.
De esta manera se puede lograr un conjunto redundante de mediciones
de Consumo y Potencia las mismas que pueden ser analizadas utilizar^
do la Teoría de Estimación de Estado mediante la siguiente expre-
sión:
X = (A1 . W . A)"1 . A1 . W . C
Para hacer aplicables estos conceptos se obtendrán las curvas de:
- La unidad No. 3 de la Central a Gas "Santa Rosa", y
- La unidad No. 3 de la Central a Vapor "Ing. Gonzalo Cevallos" de"
Estero Salado.

229
4.4.1. Curva Entrada - Salida de la Unidad No. 3 de la Central
Santa Rosa
•iHabiéndose ya explicado el procedimiento de prueba a seguir (ANEXO
C), se tabularán inmediatamente los valores promedios obtenidos en
la prueba, para luego evaluarlos siguiendo el análisis de Estima-
ción de Estado, así:
TABLA DE VALORES PROMEDIOS DE CONSUMO DE COMBUSTIBLE Y POTENCIA GE_
NERADA
CONSUMO DE COMB.
Lts/min.
55.200
63,866
69.200
74.133
82.330
89.667
91.400
108.133
POTENCIA GEN.KW
6.075
8.075
9.200
10.125
12.025
13.775
14.025
16.825
al aplicar la expresión que da el "mejor estimado" de las constan-
tes a, b y c se tiene:
X =
a
b
c
8.6313 x 10
2.8608 x 10"3
351180

230
o lo que es lo mismo
C.(PG) = 8.6313 x 10"8PG2 + 2.8608 x 10"3PG + 35.180 |Lts/min|
qué es la ecuación general de comsumo de combustible de la unidad
No. 3 de la Central a Gas "Santa Rosa".
Para comprobar la bondad de ajuste de la ecuación calculada se rea_
•Tizará una comparación entre estos valores y los reales, así como
también el cálculo del Error relativo para todos los puntos de Po_
tencia de la muestra.
TABLA DE COMPARACIÓN DE VALORES REALES Y CALCULADOS A PARTIR DE LA
ECUACIÓN OBTENIDA
MUESTRA
#
1
2
3 .
4
5
6
7
8
POTENCIAÍKW)
6.075
8.075
9.200
10.125
12.025
13.775
14.025
16.825
CONSUMO . REAL
(Its/min)
55.200
63.866
69.200
-74.1-33
82.330
89.667
91.400
108.133
CONSUMO CALCULADO
(Its/min)
55.740
63.910-
68.800
72.990
82.060
90.970
92.280
107.700
ERROR
(*)
0.97
0.07
0.58
1.57
0.33
1.43
0.95
0.40
De estos resultados se puede -ver que la ecuación calculada cumple

231
de buena forma con su cometido, puesto que si se aprecia el cá1cu_
lo del error relativo correspondiente a cada muestra, se puede no_\r que estos son bajos. Así, se puede decir que la ecuación caj_
culada es una buena aproximación de la real y por lo tanto puede
ser utilizada en forma práctica.
Cabe destacar que si se realizan las pruebas con un mejor equipo
de medición, podría lograse un mejor ajuste de la ecuación, ya que
todos los datos obtenidos fueron extraídos de equipos instalados
en las mismas turbinas.
4.4.2. Curva Entrada - Salida de la Unidad No. 3 de la Central a
Vapor'"Ing.'Gonzalo Cevallos"
Dentro del análisis para obtener ésta curva vale hacer varias acla_
raciones para que en el futuro no se vuelvan a cometer los mismos
errores:
- La prueba se realizó estando la unidad No. 3 en operación normal
dentro del sistema, ya que la unidad No. 2 de la misma central
se encontraba en reparación, entonces todos los datos no son to_
talmente confiables puesto que no se podía lograr una estabili-
dad completa de la máquina en cada punto de carga.
- Por los pormenores anotados, cabe decir que todos los datos a éva_
luar especialmente los de potencia, fueron tomados del medidor -
de KWH por considerar que es el instrumento que da la mejor idea

232
de lo que sucede en la realidad, así como es el único que puede dar
el valor promedio o real de la generación en un Intervalo'de tiem-
po dado. En la medición del Cons-u.mo de Combustible se utilizó el
flujómetro de la misma máquina, así mismo este aparato mide exacta-
mente cuanto combustible ha pasado en un intervalo de tiempo dado.
Con estas aclaraciones se procede a tabular los datos o valores me_
dios obtenidos en las pruebas; así:
TABLA DE VALORES MEDIOS DE CONSUMO Y POTENCIA OBTENIDAS EN LA PRUEBA
CONSUMO DE COMB.
(Its/nrin)
318.6667
323.0333
323.5167
340.0667
276.6667
275.0667
-270.8333
202.6667
.106.1167
293.2500
276.8333
241.1667
-226.3333
155.9500
233.4167
288.7000 '
232.5500
325.000
POTENCIA GEN.
(KW)
73.000
74.500
72.500
75.000
66.000
64.000
"64.300
47.000 '
21.000
67.000
64.000
55.000
52.000
33.500
52.500
65.000
' 73.000
73,000

233
Evaluando todos estos datos con ayuda de la expresión de Estima -
clon de Estado, se obtiene:
X =
a
b
c
-
2.4682 x 10"8-3
1.5751 x 10
75.827
o lo que es lo mismo
C(PG) = 2.4682 x 10~ PG2 + 1.5751 x 10"3 PQ + 75.8270 [Hs/nrin]
que es la ecuación aproximada de Costo de Generación de la unidad
a vapor No. 3 de la Central "Ing. Gonzalo Cevallos".
Dentro del análisis de estimación de estado, fue deshechada la me_
dición No. 9 correspondiente a la potencia de 21 MW por no ser cohe_
rente con las restantes mediciones, asr se tiene que de acuerdo a
la ecuación calculada el valor de consumo de combustible para 21
MW es de: 119.7889 [Its/min].
Como comprobación de la bondad de ajuste de la ecuación calculada
respecto a la real obten.ida en forma práctica, se tabulan los si-
guientes resultados y el cálculo del error.
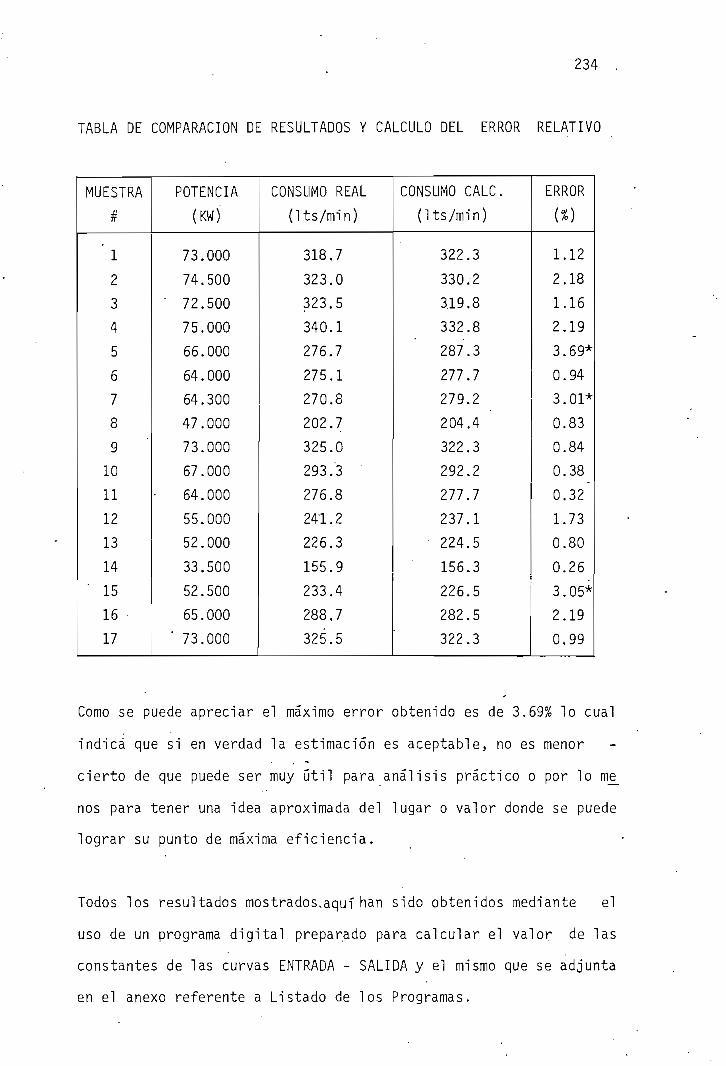
234
TABLA DE COMPARACIÓN DE RESULTADOS Y CALCULO DEL ERROR RELATIVO
MUESTRA
#
' 1
2
3
4
5
6
7
8
9
10
11
12
13
14
" 15
16
17
POTENCIA
(KW)
73.000
74.500
' 72.500
75.000
66.000
64.000
64.300
47.000
73.000
67.000
64.000
55.000
52.000
33.500
52.500
65.000
" 73.000
CONSUMO REAL
(Its/min)
318.7
323.0
323.5
340.1
. 276.7
275.1
270.8
202.7
325.0
293.3
276.8
241.2
226.3
155.9
233.4
288,7
325.5
CONSUMO CALC.
(Its/min)
322.3
330.2
3.19.8
332.8
287.3
277.7
279.2
204.4
322.3
292.2
277.7
237.1
224.5
156.3
226.5
282.5
322.3
ERROR
(*)
1.12
2.18
1.16
2.19
3.69*
0.94
3.01*
0.83
0.84
0.38
0.32
1.73
0.80
0.26
3.05*
2.19
0.99
Como se puede apreciar el máximo error obtenido es de 3.69% lo cual
indica que si en verdad la estimación es aceptable, no es menor
cierto de que puede ser muy útil para análisis práctico o por lo me_
nos para tener una idea aproximada del lugar o valor donde se puede
lograr su punto de máxima eficiencia.
Todos los resultados mostrados.aquí han sido obtenidos mediante el
uso de un programa digital preparado para calcular el valor de las
constantes de las curvas ENTRADA - SALIDA y el mismo que se adjunta
en el anexo referente a Listado de los Programas.

235
CAPITULO V
POTENCIA
Con el propósito de visualizar la utilidad de la Teoría de Estima-
ción de Estado , se presentará aquí una descripción del programa
digital, el mismo que consta de un programa principal y 8 subruti_
ñas. El programa digital se encuentra dividido en dos partes:
PRIMERA PARTE.-'Para poder aplicar la teoría de estimación en for.
ma teórica, es necesario conocer el estado del sistema en un cier_
to punto de operación. En primera instancia se desarrolla un pro_
grama de flujos de potencia usando el método de Newton-Raphson for_
ma.l s este programa es simple ya que no contiene ningún proceso de
optimización en la programación. Sin embargo sirve para el fin prc^
puesto, el mismo que consiste en obtener la solución de un flujo
de potencia para cada ejemplo, y de esta manera conocer los valo-
res medios de todas las variables de interés del sistema, para fi_
nalmente escoger de toda la solución un conjunto de datos que den-
tro de la Teoría de Estimación, serán las mediciones que llegan al
centro de control para su evaluación y el correspondiente análisis
del estado del sistema; cabe mencionar que así como pueden tomarse
datos reales de la solución de flujos, se pueden también incluir
perturbaciones que serán a su vez las mediciones erróneas dentro
del conjunto total de muestras que servirán para comprobar la valj_
dez de la teoría y así poderla aplicar luego con fines prácticos.

236
SEGUNDA PARTE.- La segunda parte del programa digital sirve para
realizar el análisis de Estimación de Estado en un S.E.P. (propósj_
to de este estudio-).
Como se dijo anteriormente, para poder aplicar la Teoría de Estima_
ción es necesario disponer de una cierta cantidad de información
del sistema, que por cierto'tiene que ser redundante, para encon-
trar la mejor estimación de las variables de estado. Es asf como
a partir de la . Subrutina ESTIMA se empieza con el proceso, el
mismo que consiste en la evaluación del conjunto de muestras o me_
diciones del sistema que se supone han sido tomadas en tiempo real,
la detección de datos erróneos en caso de que existan y la corre£
pendiente identificación del valor erróneo utilizando para el ef.ec_
to los importantes conceptos estadisticos.de: los Mínimos. Cuadra_
dos Ponderados; la distribución CHI-CUADRADO y los de normalización
de errores utilizando conceptos de Covarianza de los Residuos. Con
esta breve introducción de lo que es "el programa digital, se analj_
zara con precisión cada una de sus partes^" dejando a un lado la ex_
plicación de las variables y arreglos 'utilizados, 'la misma que se
dará en detalle en el Anexo correspondiente al manual de uso -del
programa.
5.1. DESCRIPCIÓN DEL PROGRAMA PRINCIPAL
Como se mencionó antes, en el programa principal básicamente se re_
suelve el problema.de flujos de potencia para conocer los valores
medios de las variables de interés del sistema.

237
En primera instancia se leen los datos generales,tales como: núme-
ro de nodos, número de elementos, número de barras de tensión con_
trolada, factor de convergencia máximo, número de iteraciones del
problema a resolver, selector del problema y potencia base; segui-
damente se leen los datos de la matriz configuración, a continua_
ción se leen los datos de los elementos del sistema para con ellos
definir los elementos de la matriz Ygus» y por último se leen las
condiciones iniciales (Caso Base),
Una vez conocida la matriz Ygus del sistema y las condiciones inj_
ciales de operación, se empieza con el calculo del vector indepen -
diente, luego con la formación del Jacobiano para proceder a en-
contrar el vector de incrementos de los valores reales e imagina-
rios de los voltajes de barras. En esta parte se invierte el Jaco^
biano llamando a la subrutina INVERT y luego se multiplica el re-
sultado anterior por el vector independiente mediante el uso de la
subrutina MULT. Una-vez conocidos los incrementos del vector de
variables de estado, se obtienen los nuevos valores de las varia_
bles de estado para calcular las potencias de generación reactivas
en las' barras de voltaje controlado y chequearlos con los límites
máximos y mínimos respectivos a cada barra, de generación, se toma
la acción correspondiente en caso de violarlos y si no, se vuelve
con el proceso hasta que se cumpla con el criterio de convergencia
dado.
Una vez cumplido esto, se llama a la subrutina FLUJOS para así oj
tener los valores medios de todas las variables de interés como
238
son: Potencias de generación, de carga, flujos a través de líneas y
transformadores y los valores respectivos de las variables de est£
do del sistema. Para continuar con el proceso de Estimación de Es_
tado, se dispone de un Indicador, SW1, el cual tomará valores de 1,
2 ó.3.para: realizar el cálculo de flujos de potencia, evaluar el
estado del sistema mediante el uso de la teoría de Estimación o las
2 cosas a la vez. Más adelante se llama a la Subrutina ESTIMA, lue_
go con los valores obtenidos se calculan los estimados del sistema,
es decir, se llama nuevamente a la Subrutina FLUJOS y de esta mane_
ra termina todo el proceso.
5.2, DESCRIPCIÓN DE LAS SUBRUTINAS .
Dentro de este análisis se .clasifican a las subrutinas de acuerdo a
su importancia en el programa digital, así se tiene que, hay subru-
tinas de complemento o aquellas que se utilizan solamente para rea-
lizar cálculos en el proceso y de definición o aquellas que se uti_
lizan para definir todo un proceso y en la cual se aplican los cor[
ceptos más importantes para evaluar un sistema.
5.2.1. Subrutina MULT.-
Esta es una subrutina de complemento y se utiliza para multiplicar
una matriz por un vector; en este caso el -vector puede ser: el de
incrementos de variables dependientes en el caso de flujos o el de
residuos de los valores medidos en el caso de estimación.
239
5.Z.2. Subrutina INVERT
Es una subrutina de complemento y sirve para invertir una matriz -
cuadrada. En esta subrutina se pueden dar dos posibilidades:
a. Que la matriz sea definida, en cuyo caso se sigue con el proce-
so; o
\
b. Indefinida. La no definición de la matriz puede darse en el ca_
so de flujos' por nulidad del determinante de la matriz, o en Es_
timación por falta de información de alguna parte del sistema, a
excepción de la barra'oscilante, puesto que de ella se conocen
inicialmente su magnitud y ángulo de fase, y de barras termina^
les o aisladas del sistema. También se puede dar este fenómeno
por incoherencia en los datos.
5.3.2. Subrutina FLUJOS
Esta es una subrutina de definición ya que permite aplicar los con_
ceptos necesarios para obtener los valores de las inyecciones, y
flujos ya sea utilizando el algoritmo de solución de flujos para ob_
tener los valores medios a estimar o los mejores estimados del sis_
tema si ese es el caso.
5.2.4. Subrutina ESTIMA
Esta es una subrutina de definición y al igual que el programa prin
240
cipa! es la principal subrutina y se la utiliza para definir todos
los conceptos dados dentro de la Teoría de Estimación. Aquí, en
primera instancia -se lee: el número de mediciones que se tienen -
del sistema, magnitud del voltaje y ángulo de fase de la barra oscj_
lante, luego se leen los datos de las mediciones simuladas para
evaluar el estado del sistema, con su respectiva especificación; así
se lee: el tipo de medición, es decir, si corresponde a potencia -
activa en la barra, potencia reactiva, flujo de potencia activa — ,
flujo de potencia reactiva o magnitud de voltaje de barra; en caso
de que la medición sea de flujo de potencia, se especificará si es
en línea o a través de un transformador; si el flujo es a través
de un transformador y este contiene tap, se deberá especificar en
que nodo se encuentra, si es en p o en q; además se lee el valor
de la medición, el o los nodos involucrados en la medición, la des_
viación standard del equipo utilizado y el valor del tap si es que
la medición lo requiere. De esta manera se tendrá un conjunto 're_
dundante de mediciones como se mostró en el capítulo III de la pre_
senté tesis, con los .cuales se procede a evaluar el sistema.
Así, se empieza formando el jacobiano de acuerdo a las diferentes
mediciones, como también el vector independiente de residuos para
todas las mediciones, luego se forma el vector de pesos o pondera-
ciones haciendo uso de los valores de desviación standard de cada
medición y de esta'manera poder aplicar la' expresión (modelo no 1_1_
neal) que a la larga dará el vaTor de los mejores estimados de las
variables de estado del S.E.P.

241
Dentro de esta subrutina se llama a las restantes subrutinas para
poder cumplir con todo el proceso de Estimación; asi por ejemplo -
se llama a la subrutina MULTT., PROD, INVERT, cada vez que se de-
sea realizar alguna operación para cumplir con la expresión de los
mejores estimados de los incrementos de las variables de estado.
Una vez obtenidos estos valores se procede a realizar el análisis
de convergencia, es decir, se busca el mayor valor de los incremen_
tos de magnitud y ángulo de las variables de estado, se los compa_
ra con el Epsilon dado para la convergencia en ambos, casos, y, si
es que se-ha cumplido con el criterio de convergencia, se pasa a
la fase de detección de datos erróneos, si no se cumple, se incre_
menta el valor inicial de las variables de estado (X + AX) y se
vuelve con el proceso anterior. Cabe destacar que el modelo de'so_
lución aplicado es el de Newton-Raphson formal.
Si es que ha.pasado esta fase como se indicó anteriormente, se caj_
cula el valor de la función de error, J(X"), se pone a este valor -"V
en porcentaje,• se obtiene el valor de grados de libertad de la
prueba y se extrae el valor correspondiente de la distribución CHI
CUADRADO para realizar la comparación respectiva en la prueba de
Hipótesis P(J(Y) <.tj/J(X') tiene distribución CHI-CUADRADO) = a.
Si la función de error J(X") pasa la prueba, termina el proceso de
estimación, es decir, se ha obtenido la mejor estimación de las va_
Hables de estado; a continuación se forma una tabla comparativa -
de los valores medidos y calculados o estimados, y se regresa al

242
programa principal en donde se calculan todos los valores de las va_
riables de interés del sistema, al igual que se hizo en el cálculo
de flujos de potencia; y termina el proceso total. (Fin del progra_
ma).
Pero si no se ha cumplido_con la prueba de Hipótesis dada en la fa
se de detección de datos erróneos, se pasa a la fase de identifica-
ción del dato erróneo que se supone existe. Para esto se llama a
la Subrutina IDENT; una vez identificado el error y deshechado . se
vuelve a la Subrutina ESTIMA y empieza nuevamente todo el proceso,
asi hasta obtener la mejor solución del estado del sistema.
Por todo lo. enunciado se demuestra que esta subrutina es la parte
medular de todo el programa y por tanto es a la que se debe prestar
mayor atención.
5.2.5. Subrutina MULT1
Es una subrutina de complemento y se la utiliza cada vez que se
quiere multiplicar a una matriz por el vector'de pesos o ponderacio_
nes. Se debe acotar aqui que a la matriz de pesos por ser diago-
nal se la almacena en forma de vector para disminuir la cantidad de
memoria en el programa.
5.2.6. Subrutina PROD
Al igual que el caso anterior es una subrutina de complemento y sir
243
ve solamente para multiplicar dos matrices. Cabe destacar que cuan_
do se ha llegado al .proceso de identificación y se hace necesario -
conocer los valores de la diagonal de la matriz de covarianza de los
residuos, esta subrutina solamente calcula dichos elementos con el
propósito de disminuir memoria y tiempo de ejecución, del programa.
5.2.7. Subrutina CHI
\
También es una subrutina de complemento ya que solo se utiliza para
extraer el valor de la distribución CHI-CUADRADO para el grado de
libertad calculado en la subrutina ESTIMA y de esta manera proceder_
a realizar la comparación entre el valor de la función de error J(X~)
y el correspondiente de la distribución CHI-CUADRADO'en el proceso
de detección de mediciones erróneas. .
5.2.8. Subrutina IDENT
Esta es una subrutina de definición y sirve para identificar el da_
to erróneo luego de que se ha detectado su existencia.
Su funcionamiento es el siguiente:
Detectada la presencia de un error en las mediciones, se procede pri_
meramente a calcular los términos diagonales de la matriz de cova-
rianza de los residuos, para luego normalizarlos bajo las mismas ba_
ses.

244
Una vez que todos los residuos de las mediciones han sido normal iza_
dos, se busca el mayor valor (absoluto) y se considerará que éste
es el que contiene a la medición errónea. AquT se procede a la
eliminación de dicha medición de la siguiente manera: a la medición
errónea se la pasa al último lugar de la lista de mediciones y a la
que estaba en el ultimo lugar se la pone en el lugar correspondien-
te de la medición a deshechar, se envia un mensaje de error, indican_
do la medición que ha sido despechada, se disminuye en uno el nüme_
ro de mediciones y se repite nuevamente el proceso de estimación ,
hasta que J(X) pase la prueba.
5.3. DIAGRAMAS DE BLOQUE Y FLUJO DEL PROGRAMA PRINCIPAL Y SUBRUTI-
NAS.

PROGRAMA PRINCIPAL 245
INICIO 3DATOS GENERALES,
DATOS DE LOS ELEMENTOS
DEL• SISTEMA
FORMACIÓN DE LA'. MATRIZ
Y,
DATOS DE BARRAS
(CASO BASE )
\R VOLTAJES DE
BARRA: Ep
p = 2,3 , . . .n
1
PONER CUENTA DE LA ITERA
CION: K = 1
CALCULAR LAS POTENCIAS
ACTIVAS Y REACTIVAS
Vk) y QP(k)
A'
<DS/R
ESTIMA
S/R
FLUJOS

246
CALCULAR LOS TÉRMINOS
DEL VECTOR INDEPENDIENTE
APp, AQp, A Ep 2
DETERMINAR EL MÁXIMO
CAMBIO EN POTENCIA
max- APp (k) A^, max AQp
CALCULAR LAS CORRIENTES DE
BARRA
, (k)(k)
Ck)
E *P
(k)
CALCULAR LOS ELEMENTOS DEI
JACOBIANO
S/R
INVERT
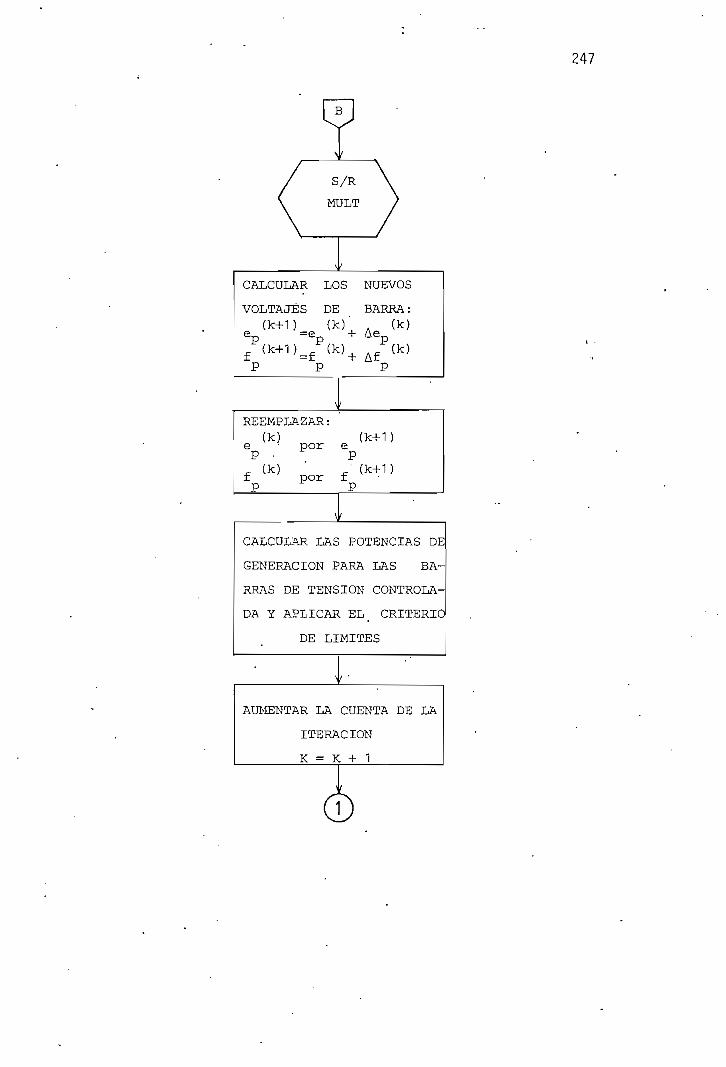
S/R
MULT
247
\
CALCULAR LOS NUEVOS
VOLTAJES DE BARRA :(k+1) (k) (k)e =e + Ae
f ík+1W Ck)+Af WP P P
\R :
(k)e • porP •f (k)f porP
\
(k+1)eP
f' (k+1>P
r
CALCULAR LAS POTENCIAS DE
GENERACIÓN PARA LAS BA-
RRAS DE TENSIÓN CONTROLA-
DA Y APLICAR EL_ CRITERIO
DE LIMITES
\R LAi '
CUENTA DE LA
ITERACIÓN
K = K + 1
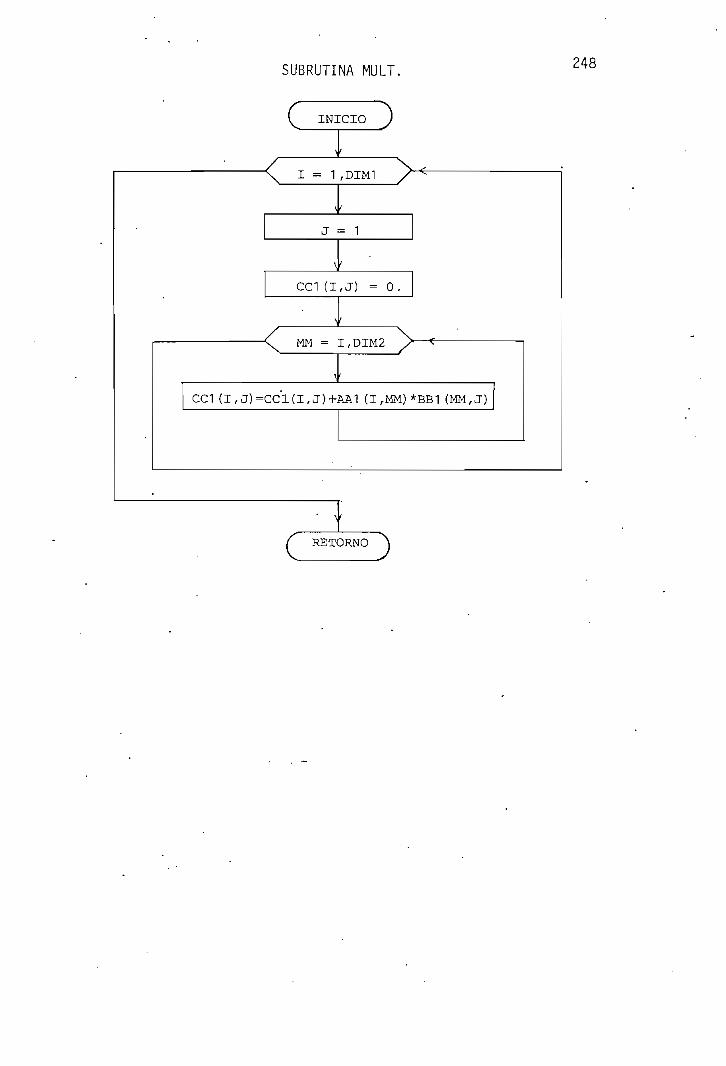
SUBRUTINA MULT. 248
( I N I C I O )
• 1 = 1 ,DIMI ~
j = 1
CCl(I,J) = O
< M M = IfDIM2
CC1 (I,J)=CC1(I,J)+AA1 (I,MM)*BB1 (MM,J)
RETORNO

SUBRUTINA INVERT249
( INICIO J
L = N
X J = 1 ,L
\'
LT(J). = O.
T1 = 0.
LT(K) = 1

D
i) sw- (r' i) £w=(r' i)
- L —

251
•
AA2(J,K)=-AA2(J,K) :
I
C RETORNO J

252
O
SUBRUTINA FLUJOS
( INICIO J
-\ = 1 , NODOS >~
CALCULAR LAS POTENCIAS
REAL Y REACTIVA DE GENE_
RACIÓN Y CARGA
I =*1 r NODOS X.
"N J = 1 , NODOS ~
ENCERAR LOS ARREGLOS EN
DONDE SE ALMACENARAN LOS
VALORES DE FLUJO DE P0_
TENCIA REAL Y REACTIVA
I = 1 ,NELEM V
CALCULAR LOS FLUJOS DE
POTENCIA REAL Y REACTIVA
A TRAVÉS DE LOS ELEMEN-
TOS DEL SISTEMA
A
253
o
IMPRIMIR LOS RESULTADOS
PARA LA SOLUCIÓN DE
FLUJOS

SUBRUTINA ESTIMA
INICIO
TRANSFORMAR A COORDENADAS
POLARES TODOS LOS VALORES
DE ADMITANCIA DE LOS ELE
MENTOS DE LA RED
LEER DATOS'.DE: NUMERO DE MEDÍ j
CIONES (NMED) Y VOLTAJE DE
BARRA OSCILANTE. .
. \)
LEER LAS MEDICIONES DEL SISTE
MA Y LA RESPECTIVA ESPECIFI_
CACION DE CADA UNA ' DE ELLAS.
254
G>INICIALIZAR LOS VALORES' DE
LAS VARIABLES DE ESTADO
V =1.0;p=1,2,..nodos
6 = 0 ; p = 2,3,..nodos
NUMERO DE VARIABLES DE ESTA
DO DEL SISTEMA A RESOLVER :
NODO = 2 * NODOS - 1
A

255
INICIAR EL VALOR DE LA ITE-
RACIÓN: CUENTA = 1
I = 1,NMED
CALCULAR LOS TÉRMINOS DEL
JACOBIANO (F) Y DEL VECTOR
(AY) , DE ACUERDO A LAS ME_
DICIONES SIMULADAS.
FORMAR EL VECTOR DE PESOS O
PONDERACIONES (W)
FORMAR LA MATRIZ TRANSPUES-t
TA DEL JACOBIANO (F )
S/R
MULT1t -
A = F .W

256
BUSCAR LA MAYOR VARIACIÓN EN
' . AVp y ASp
• max AVp | , max A6p.[
CALCULAR LA FUNCIÓN DE
ERROR: • J(X)

257
CORREGIR LOS VALORES DE
MAGNITUD Y ÁNGULO DE FASE
DE LOS VOLTAJES DE BARRA
INCREMENTAR LA CUENTA DE
LA ITERACIÓN:
CUENTA = CUENTA + 1
CALCULAR LOS GRADOS DE
LIBERTAD DE LA PRUEBA
GLIBER=NMED-NODO
S/R
IDENT
SE OBTIENE LA MEJOR ESTI_
MACION
C\f
RETORNO
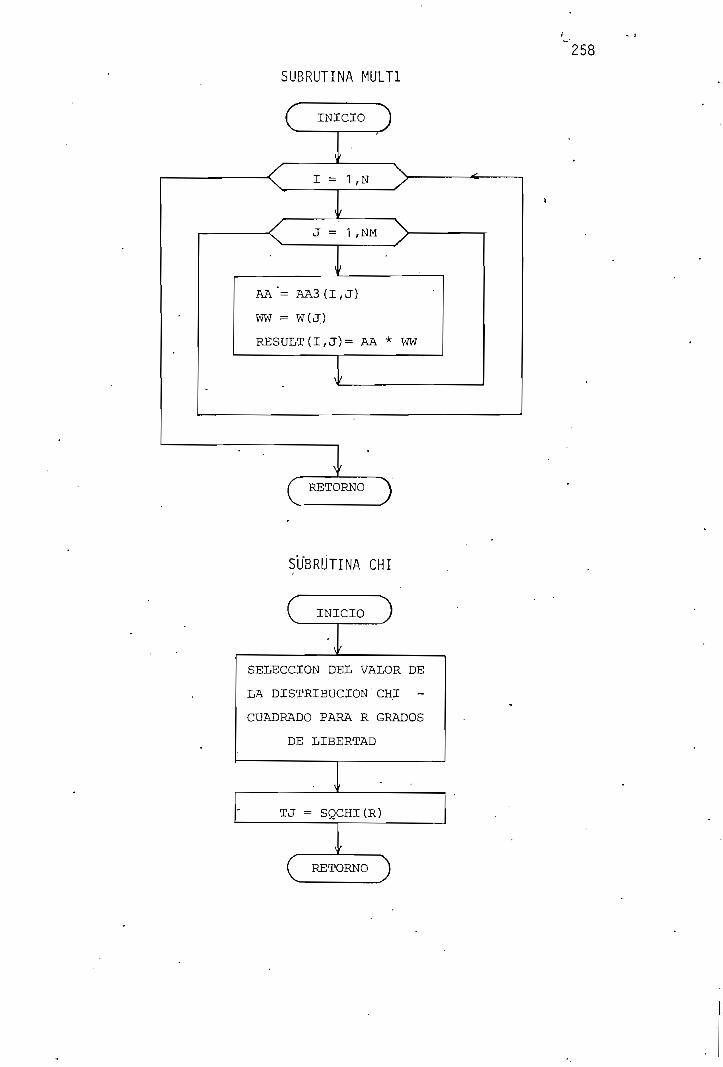
SUBRUTINA MULT1
C INICIO J
J = 1 ,NM \
AA' = AA3 (I,J)
WW = W(J)
RESULT(I,J)= AA * WW
RETORNO A
258
SU'BRUTINA CHI
INICIO )SELECCIÓN DEL VALOR DE
LA DISTRIBUCIÓN' CHI -
CUADRADO PARA R GRADOS
DE LIBERTAD
TJ = SQCHI(R)
^ ^ \
C RETORNO )
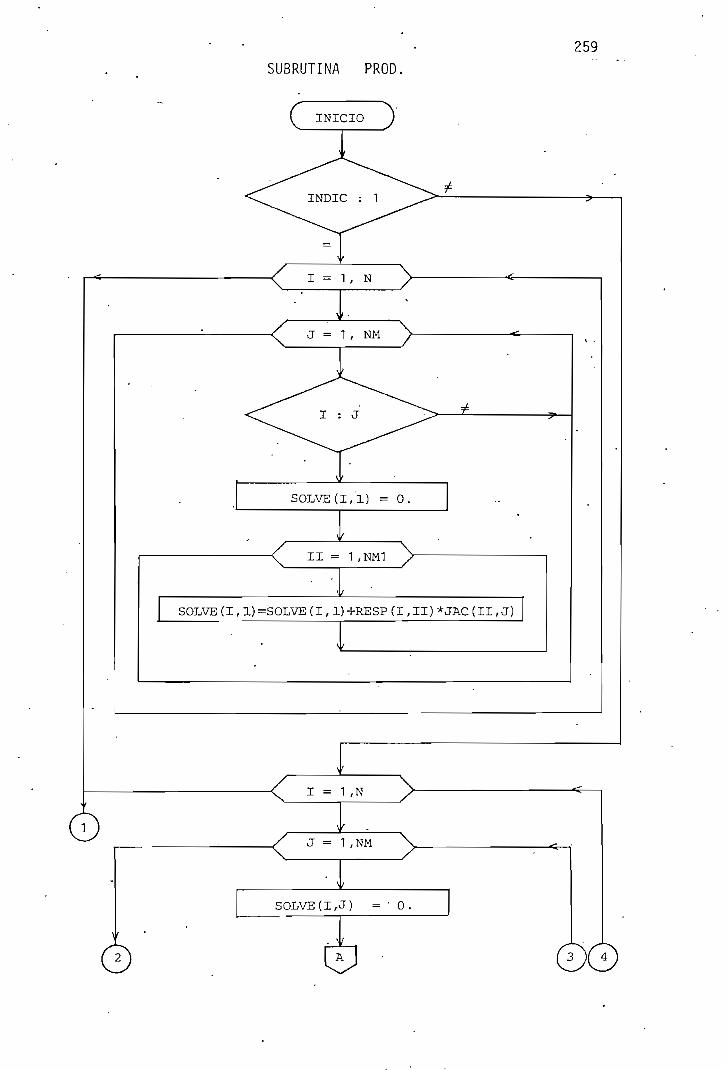
SUBRUTINA PROD.
259
J = 1, NM
SOLVE(I,'l) = 0.
= 1 ,NM1
SOLVE(I,1)=SOLVE(I,1)+RESP(I,II)*JAC(II,J)
OI = 1 ,N
__,^J = 1 ,NM V
SOLVE(I,J) = ' O .
© A ©0

260
o© ©0ii - 1 ,NMI -
SOLVE(I,J)=SOLVE(I,J) + RESP(1,11)*JAC(II,J)
i
( RETORNO J
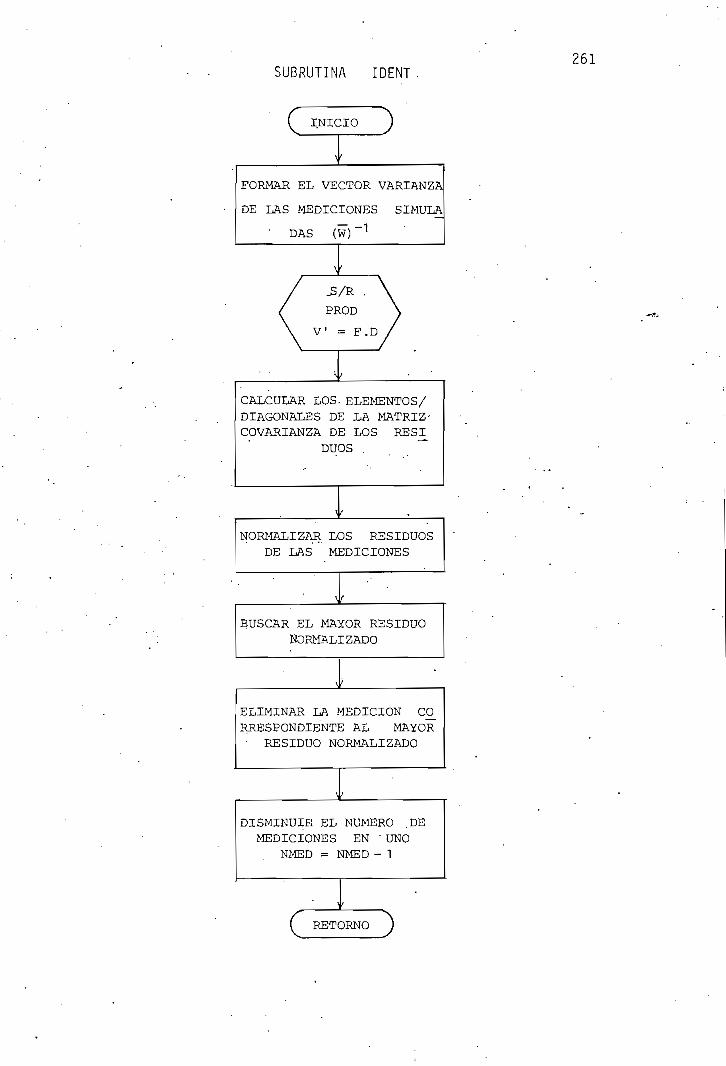
SUBRUTINA IDENT261
cINICIO
FORMAR EL VECTOR VARIANZA
DE LAS MEDICIONES SIMULA
' DAS (W)~1
CALCULAR LOS- ELEMENTOS/DIAGONALES DE LA MATRIZ-COVARIANZA DE LOS RESI_
DÚOS .
NORMALIZAR. LOS RESIDUOSDE LAS MEDICIONES
BUSCAR EL MAYOR RESIDUONORMALIZADO .
ELIMINAR LA MEDICIÓN C0_RRESPONDIENTE AL MAYOR
• RESIDUO NORMALIZADO
DISMINUIR EL NUMERO .DE. MEDICIONES EN 'UNO
NMED = NMED - 1
Cy
RETORNO

262
CAPITULO VI
CONCLUSIONES Y RECOMENDACIONES
Uno de los grandes problemas que se encuentran al supervisar y con_
trolar un sistema de potencia en tiempo real, es de total descono_
cimiento del punto de operación del mismo en un instante dado, ya
que muchos de ellos son operados en forma rudimentaria, es decir,
no se dispone de un Centro de Control con un sistema de medición y
comunicación adecuado, y lo que es peor aún, se necesita mucho
tiempo .para recopilar la información total o parcial del sistema y
evaluarlo para tener un conocimiento pleno del estado o punto de
operación. Con la finalidad de'mejorar procedimientos, en esta te_
sis se ha realizado la exposición-del Algoritmo de Estimación de
Estado, el mismo que es usado en modernos Centros de.Control.
Como se dijo anteriormente, el problema radica en el desconocimien_
to del estado en tiempo, real del s.istema. Esto por supuesto solo
puede evitarse de una manera, y es, recolectando automáticamente -
la información más adecuada para enviarla al Centro de Control, de£
de donde se podrá evaluar, supervisar y controlar el mismo para te_
ner una idea cierta, y en pocos instantes, del estado o punto de
operación.
Varios métodos de Estimación han sido mencionados como alternativas
para evaluar estos datos y en base.al resultado tomar las acciones
de control apropiadas. En-el presente trabajo solamente se ha desa
263
rrollado la introducción a la teoría de Estimación de Estado utilj_
zando para la solución el criterio estadístico de los "Mínimos
Cuadrados Ponderados".
CONCLUSIONES
Eficiencia del Método:
Se ha encontrado que el método desarrollado es muy útil en la su-
pervisión y control de un sistema, porque permite manejar datos
erróneos de entrada al estimador en forma.eficiente.
Esto por supuesto es importante,, ya que a través del uso del alg£
ritmo es posible detectar datos erróneos utilizando la curva esta,
dística de distribución. CHI-CUADRADO... que .es la que más se ajusta
al análisis de datos muéstrales; puesto que no siempre éstos con-
cuerdan exactamente con los- resultados teóricos esperados, a pesar
de que las mediciones son compatibles entre si a excepto en aque-
llas erróneas que pueden existir por fallas del sistema de medi-
ción.
A propósito de esto, mediante la aplicación de la teoría es posi-
ble también identificar los datos erróneos que pueden existir en
el conjunto total de muestras, ya sea: Por la mala instalación del
aparato o porque alguno o algunos de los equipos involucrados en
la medición se encuentran defectuosos. De esta manera el operador
del sistema, no solamente que podrá conocer el estado de la red en

264
tiempo real, sino que conociendo las anormalidades e-xlstente en cuan_
to a errores en el sistema de medición, podrá pedir su inmediata re
visión o el correspondiente mantenimiento del equipo en falla desde
el Centro de Control.
- Consideraciones del modelo en la programación y ejecución:
Con relación, a la modelación de la teoría, se puede apreciar que la
formulación que se utiliza es la misma que se aplica en los cálcu-
los convencionales de flujo, con la diferencia de que aquí se mejjD
ra el modelo ya que también se -incluyen aquellas fórmulas obtenidas
para el cálculo de los flujos de potencia en los elementos del si_s_
tema para considerar la redundancia en las mediciones.
Así, por utilizar todo este conjunto de fórmulas que son conocidas,
este método es simple en la programación; sin embargo y dado que se
necesita de un conjutno sobredeterminado de mediciones, el requeri-
miento de memoria en la programación, es considerable, tanto más si
el sistema aumenta en tamaño y complejidad.
Con relación al tiempo de ejecución, se puede decir que éste es len-
to por la cantidad de operaciones que se realizan entre matrices ,
aún más, si el sistema de medición es grande y el numero de medicio_
nes incorrectas es apreciable.
- Características de convergencia del método de solución.-
Ya que el modelo de Estimación utilizado en el programa, es el "no
265
lineal", y que para su solución se requiere de una técnica iterati_
va; se ha escogido el método de Newton-Raphson formal, puesto que
es un algoritmo que tiene la importante propiedad de necesitar p
co numero de iteraciones para obtener convergencia, lo cual ~ hace-
que el método propuesto sea eficiente.
- Disponibilidad de información e influencia de la redundancia en
el costo del sistema de medición y comunicación
"Del número de mediciones'depende el grado de redundancia y conse-
cuentamente el costo del sistema de medición y comunicación, sin
embargo, ¿Cuál será el grado de redundancia adecuado?. De un si_s_
tema pueden obtenerse soluciones-aceptables aún cuando se tenga un
grado de redundancia bajo; esto ocurre si todos los errores de las
mediciones están dentro de los limites permitidos (•_+ 3 ), en estos
casos, los valores calculados de las cantidades medidas se ajustan
muy bien a los valores medidos;, y si hay cantidades con un gran
error, éstas también se ajustarán exactamente a los valores calcu-
lados. En esta situación, no seria posible identificar errores co_
mo se explicó previamente, y la estimación no sería confiable en
caso de haberla obtenido . Por otro lado, si se trabaja con un gra_
do de redundancia elevado se puede estar utilizando recursos econó_
micos inútilmente, ya que a partir de.un cierto punto, por más que
sa mejore la redundancia los estimados no varían.
Habiendo concebido el problema de redundancia de esta manera, se
puede decir que ésta no tiene que ser ni muy baja, ni muy alta, ya
266
que influiría directamente en el costo del sistema de medición y
comunicación; por un lado porque la estimación no seria convenien-
te, y por el otro, porque el costo seria muy elevado, es decir la
redundancia necesaria para detectar e identificar datos erróneos
debe considerar el hecho de que hay mediciones que en el proceso -
pueden ser eliminadas" por inconsistentes, así como se debe consi-
derar que la salida de algún canal de comunicación puede dejar a
alguna parte del sistema aislado. En esta circunstancia hay que
aplicar alguna técnica que permita escoger el número de mediciones,
la calidad del equipo a utilizar'y la correspondiente ubicación de
cada uno de ellos en la red.
De acuerdo a las pruebas realizadas en los ejemplos descritos, se
ha encontrado que la mínima redun-dancia requerida para estimar el
estado de un sistema de potencia utilizando el criterio de los nví
nimos cuadrados ponderados, es de 0.6. . Esto bajo la suposición de
que se dispone de un sistema de medición muy confiable y que el r\ü_
mero de datos erróneos que puede existir en un momento dado es pe_
queño.
Nota: La selección de mediciones se ha realizado utilizando el cri_
terio de Observabilidad que versa sobre el número mínimo de
mediciones que se deben realizar en cada barra.
De lo anotado anteriormente se puede dedir que a partir de una re_
dundancia de 0.6 ya se tiene un grado de confianza adecuado para
pensar que la estimación realizada es buena. Sin embargo, en la

267
práctica se deb-e aumentar la redundancia para incrementar el gra_
do de seguridad y confianza, puesto que en un instante dado el núme_
ro de mediciones erróneas puede ser mayor, y es importante que en
cualquier momento el estimador esté en condición de detectar e iden_
tificar a todas las mediciones erróneas para dar resultados confia-
bles.
Otra forma de conocer con precisión el conjunto de mediciones a utj_
lizar, es usando los criterios de la "matriz observabilidad". Con
relación a esta última parte, se recomienda realizar su estudio, ya
que es importante conocer con exactitud la calidad y ubicación de
cada una de las mediciones para obtener los mejores resultados en
la estimación,
.- Importancia de las mediciones y sus características individuales
en el tratamiento de cada una de ellas -en la estimación
Se ha dicho que las mediciones que pueden intervenir en la estima-
ción son: magnitudes de voltajes, inyecciones y flujos de potencia;
sin embargo no se ha mencionado nada sobre su importancia. Partien_
do de este punto, se debe decir que es muy importante tener un con_
junto homogéneo y variado de mediciones, ya que no se podría lograr
la mejor estimación si por ejemplo se utiliza un solo tipo de medj_
ción, esto se debe a que cada valor tiene sus propias característi-
cas, las mismas que influyen en la estimación; a saber:
- Las mediciones de magnitud de voltaje en el proceso, eliminan ]a
268
necesidad de tratar al voltaje de la barra oscilante de una
ma determi rustica.1
Estas mediciones también ayudan a mejorar la redundancia local
especialmente en partes radiales de la red.
- El uso de mediciones de inyección de potencia en la estimación
es importante, ya que permite el uso de inyecciones "CERO" en
las barras de carga (ficticias); así como pueden servir como
Pseudomediciones en caso de que algunas mediciones de la red se
pierdan por fallas en algún canal de comunicación. Por tanto
ayudan también a disminuir el costo del sistema de medición y
comunicación. ' . . .
- Por último se tienen a las mediciones de flujos de potencia. Es_
'tas son de gran utilidad en sistemas mal lados» pero, en siste_
mas radiales son insuficientes. Sin embargo en combinación con
las mediciones anteriormente mencionadas, éstas forman un con-
junto muy importante de datos del sistema y son de gran ayuda
en la aplicación de la teoría de Estimación de Estado en un
S.E.P..
- Evaluación de los resultados. -
Con respecto a este tema se puede decir que se han analizado va-
rios casos para conocer las ventajas y 1 imitaciones del método den_
tro del funcionamiento de un sistema de potencia. Así se ve que

269
de acuerdo a los casos simulados, se han obtenido soluciones muy
satisfactorias. Esto se debe a que la teoría de Estimación es
una herramienta muy útil en la evaluación del estado de un siste^
ma para supervisar y controlar un S.E.P. desde un Centro de Con_
tro!. Sin embargo, vale aclarar que todas las simulaciones han
sido realizadas en una forma aleatoria, es decir, al considerar
el error en algún equipo de medición no se ha escogido a ningún
dato en particular, sino que, a cualquier valor de los dados en
el conjunto total de muestras se lo ha considerado en estado de
falla, ya que en la operación normal de un sistema no se puede pre_
decir cual es la medición que va a ser errónea. Por tanto, los
resultados son producto de la consistencia de la información que
se ha proporcionado al estimador, considerando los criterios da-
dos sobre esta teoría.
Como se ha mencionado, esta no es sino una introducción al tema:
."Aplicación de la Estimación de Estado en la Operación de Siste-
mas de Potencia", por lo cual, varias son las recomendaciones que
se sugieren para que en el futuro esta teoría sea'de mucha utilj_
dad y tenga una buena aplicación práctica en la supervisión y con_
tro! de un S.E.P.
Así, para mejorar la teoría se deberá:
- Realizar el estudio de Estimación de Estado utilizando el crite

270
rio de los mínimos cuadrados ponderados y aplicando los métodos
desacoplado y desacoplado rápido para su solución,
- Realizar un estudio de porosidad de matrices aplicando a este
tema.
- Simular el algoritmo del Configurador de Redes.
- Mejorar el filtro de-errores de medición para poder detectar y
eliminar de una sola vez a.las mediciones erróneas existentes.
- Realizar un estudio sobre la selección del conjunto de medicio-
nes para determinar con precisión la observabilodad de la red.
Esto es muy importante, puesto que a partir del conocimiento de
la"matriz observabilidad11 es posible evaluar el estado completo
del sistema además de determinar la calidad de las mediciones
a añadir a un conjunto de datos dado.
- Por último, estudiar con mayor atención el .modelo de la AEP o
modelo lineal para conocer las ventajas y limitaciones del méto_
do así como analizar métodos alternativos, en especial el fil-
tro de Kalman, ya que éste hace uso de la descripción de las va_
Hables de estado del sistema, por lo tanto utiliza mayor infor_
mación para dar un mejor estimado, asf como sirve para verifi-
car los criterios de Observabilidad. .

271
ANEXO A
MANUAL DE USO DEL PROGRAMA DIGITAL
A.l. OBJETIVO
El objetivo del programa digital consiste en introducir los
conceptos de la Teoría de Estimación en la Operación de un
sistema de potencia, así como también conocer las ventajas y
limitaciones de la teoría en el funcionamiento del S.E.P.
A.2. MÉTODO DE SOLUCIÓN
.Para poder trabajar con la Teoría de Estimación, es indispejT_
sable desarrollar un programa de flujos de potencia para co_
nocer el estado del sistema y poder luego simular mediciones
en base a estos resultados. Esta parte se resuelve utilizan_
do el método de Newton-Raphson formal.
. Una vez obtenida la solución del flujo de potencia se pasa
al análisis de Estimación de Estado, el mismo que consiste -
en introducir valores del sistema que serán las mediciones
simuladas y que entrarán a evaluarse hasta obtener la mejor
estimación de las variables de estado. Para entender mejor
el funcionamiento se divide a esta parte en tres fases, a sa_
ber:
1. Estimación propiamente dicha.
272
2. Detección de datos erróneos,.
3. Identificación-del dato erróneo.
La primera fase se resuelve aplicando la ecuación de Estimación
para el modelo NO LINEAL obtenida al utilizar el criterio esta_
dístico de los mínimos cuadrados ponderados, y su solución se
encuentra al evaluar iterativamente esta ecuación mediante el
uso del método de Newton-Raphson formal al igual que en el ca-
so de flujos, con la diferencia de que aquí el criterio de con_
vergencia se lo realiza en base a los incrementos de las varia_
bles de .estado; es decir: AV'p y A6p <_ e.
La segunda fase o fase de detección se la aplica una vez que
el algoritmo de estimación converge. Aquí se aplica la prueba
de Hipótesis, utilizando para el efecto el valor de la distribi¿
ción CHI-CUADRADO correspondiente a los grados de libertad. Por
último, la tercera fase sirve para la identificación del dato
erróneo que se considera, existe, si es que no pasó la prueba
de hipótesis en el proceso de detección. En esta fase se uti_
liza el criterio de la normalización de errores dado .
A.3. DESCRIPCIÓN DEL PROGRAMA
Se ha dicho que el programa digital se compone de un programa
principal y 8 subrutinas. Ahora se realizará una descripción
detallada del modelo utilizado.

273
1. Se leen los datos generales del sistema: número de nodos, nj¿
mero de elementos, número de barras de voltaje controlado',
factor de convergencia para el análisis del flujo de poten_
cia, máximo número de iteraciones permisibles, el valor de
un indicador o selector del programa y por último la poten_
cia base en MVA.
2. Se lee la matriz CONFIG que muestra como está conformado el
' sistema.
3. Se leen los valores de: impedancia de los elementos de la
red (líneas, transformadores y capacitores o reactores), los
nodos a los. cual es cada elemento está unido y el valor de -
la susceptancia de cada elemento..
4. Se calcula la matriz Yg^ con los valores anteriormente d_e_
finidos.
5. Se leen los datos del caso base del problema a resolver, co_
mo son: tipo de barra, valores de voltaje de barra en coor^
denadas reactangulares, potencia de generación, límites de
potencia reactiva en .caso de que la barra sea de generación,
potencias de carga, nombre de la barra y valor de la potej
cia reactiva que se genera adicionalmente mediante el uso
de Capacitores y/o reactores.
6. Empieza el proceso dando valores iniciales a los voltajes -

274
de las barras de carga y generación, además se inicia la cuen_
ta de la iteración con 1.
7. Se calculan los valores de las potencias. reactivas para to-
das las barras, excepto para la barra oscilante, Una vez -
que se calcula este valor .para cada barra, se obtienen tarn
bien los términos del vector independiente AP.
8. Se calculan, los valores de las potencias reactivas para to_
das las barras, excepto para la barra oscilante y las de ge_
neración. As! mismo se calculan los términos del vector in_
dependiente AQ.
Para las barras de generación se calculan los términos del
vector indeendiente
9. Se buscan los máximos incrementos de potencia activa ;y reac_
tiva para aplicar el criterio de convergencia, es decir, -
max/AP/ y max/AQ/ <_ e.
- Si se cumple el criterio de convergencia se obtienen los
valores verdaderos de las variables de interés llamando a
la subrutina FLUJOS y se pasa al análisis de Estimación
en caso de que el selector SW1 sea diferente de 1.
10. Si no se cumple con el criterio de convergencia, se calcu-
lan las componentes real e imaginaria de la corriente en ca_

275
da barra, excepto para la barra slack. •
11. Se evalúan los términos del Jacobiano JACOB.
12. Se realizan las operaciones pertinentes para encontrar los
incrementos de las variables de estado AX.
13. Se corrigen los valores de las variables de estado:"
' '• Xj= X j - t '
j = # de iteració'n
14. Con estos nuevos valores de las variables de estado se cal_
culan las potencias reactivas en las barras de generación,
y en aquellas .que siendo de generación se han cambiado . a
barras de carga. Aquí se deben probar varios casos; a sa_
ber:
a. - Si la barra es de generación se calcula la potencia -
de generación reactiva, se compara a este valor con
los límites máximo y mínimo y» . -
- Si viola la restricción del límite máximo, se cambia
el valor del indicador de tipo de barra a 4 y en una
nueva iteración se trata a esta barra como si fuese
de carga, QGEN(CALC) = ^GMAX'
- Si viola la restricción del límite mínimo, se cambia
el valor del indicador de tipo de barra a 5 y en una
276
nueva' iteración se trata a esta barra como si fuese de
carga, QGEN(CALC) = QGMIN-
b. - Si la barra en mención siendo de generación ha sido tra_
tada como barra de carga se compara el valor calculado
de potencia reactiva con los límites establecidos y es
posible que otra vez su valor esté dentro de ellos. Si
es así se cambia el valor del tipo de barra a 2 para
que en una nueva iteración sea tratada como barra, de
generación.
15. Se incrementa la cuenta de la iteración en 1 y empieza nue_
vamente el proceso desde el paso 7.
Una vez que el algoritmo de flujos de potencia convencional
converge, se pasa al análisis de'Estimación de Estado de la
siguiente manera:
16. Se llama a la subrutina ESTIMA para evaluar el estado del
sistema en base al criterio anteriormente expuesto. Así,
16.1. Se leen los siguientes datos: numero de mediciones del
sistema, valores del voltaje de la barra oscilante en
módulo y ángulo (radianes).
16.2. A continuación se lee: tipo de medición, es decir, si
es inyección de potencia activa o reactiva, flujo de
277
potencia activa o reactiva o magnitud de voltaje.
- Si la medición corresponde a flujo de potencia hay
- que especificar si es a través de una línea o un
transformador.
- Si la medición corresponde a flujo de potencia a
través de un transformador y este contiene taps,
hay que especificar en que lado se encuentra el
mismo: si es del lado del nodo p o q.
- El valor de la medición.
- El o los nodos involucrados en la medición.
- El valor de la desviación standard del equipo utilj_
zado en la medición.
- El valor del tap en caso de que la medición lo . re_
quiera.
16.3. Se dan valores iniciales de voltaje en magnitud y án_
guio para todas las barras del sistema, también . se
inicia la cuenta de la iteración en 1.
16.4. Con la información que se tiene se evalúa el Jacobia_
no de acuerdo a las mediciones realizadas, y se cal_
culan -los términos del vector independiente AY.
16.5. Con los valores de desviación standard se calculan

278
los elementos del vector de pesos o ponderaciones.
16.6. Se aplica la expresión de la mejor estimación para el
modelo no 1ineal.
16.7. Una vez'obtenidos los términos del vector de las va-
riables de-estado AX, se busca la mayor variación tan_
to en módulo como en ángulo.
16.8. Se apíica el criterio de.convergencia con los mayores
AVp y AÓP <; e .
- Si .se cumple con el criterio de convergencia para
los dos valores, se ha obtenido la mejor estimación
de las variables de estado, sin embargo todavía no
se está en capaci'dad de decir que son-los mejores.
Para estar seguros de ello se pasa a la fase de de_
tección de datos erróneos. (Ver 16.9).
- Si no se cumple con el criterio de convergencia, se
incrementa el valor de las variables de estado X en
AX, se aumenta la cuenta de la iteración en 1 y se
repite el proceso desde el paso 16.4.
16.9. Con los mejores estimados obtenidos en la parte ante_
rior, se calcula el valor de la función de error
(FERROR) .y los grados de libertad de la prueba (GLIBERJ
279
16.10. Se extrae el valor TJ de la distribución.CHI-CUADRADO
para los grados de libertad calculados y se compara
a éste con el valor de la función de error(FERROR).
16.11. Se aplica la prueba de Hipótesis, es decir:
- Si FERROR <_TJ, se tienenrealmente los "mejores es ti
mados", luego de realizar los cálculos y comparacio-
nes pertinentes, termina el programa.
- Si FERROR > TJ; no pasa la prueba de Hipótesis y se
pasa a la fase de identificación de.el o los datos
erróneos que existen en el conjunto de mediciones si_
muladas del sistema.
16.12. Se llama a la subrutina-IDENT. En ella se normalizan
los residuos de todas las mediciones.
16.13.;Se busca el mayor residuo normalizado.
16.14. Se procede a la eliminación de la medición que corres-
ponde al valor del mayor residuo, y
16.15. Se vuelve con el proceso de Estimación desde el paso
No. 16.3.
Para conocer la función de las subrutinas utilizadas en el pro

280
ceso, referirse al capitulo V de la presente*tesis.
A.4. NOMENCLATURA
En el programa digital se ha adoptado la siguiente nomencla-
tura.
NOMBRE DESCRIPCIÓN
NODOS Indica el número total de nodos del sistema,
NELEM Indica el número total de elementos de la red,
es decir, líneas transformadores y capacitores/
reactores. ' -
NBTC Muestra el número total de barras de genera-
ción existentes.
CONV Indica el factor de convergencia para el flj¿
jo de potencia convencional.
MAXIT Indica el número máximo de iteraciones permisj^
bles para lograr la convergencia del problema
a resolver.

281
NOMBRE DESCRIPCIÓN
SW1 Selector del programa, este -puede tomar valo-
res de: '
!•: Cuando sólo se desea calcular los flujos de
potencia por el método convencional de New_
ton Raphson.
'2: Cuando solo se desea aplicar la teoría de
Estimación de Estado.
3: Cuando se desean los dos resultados a la vez.
SBASE Muestra el valor de la potencia base en MVA.
CONFIG(I3J) Es un arreglo utilizado para conocer la configu_
ración de los elementos del sistema, Asi:
Supóngase que se tiene el-siguiente esquema:
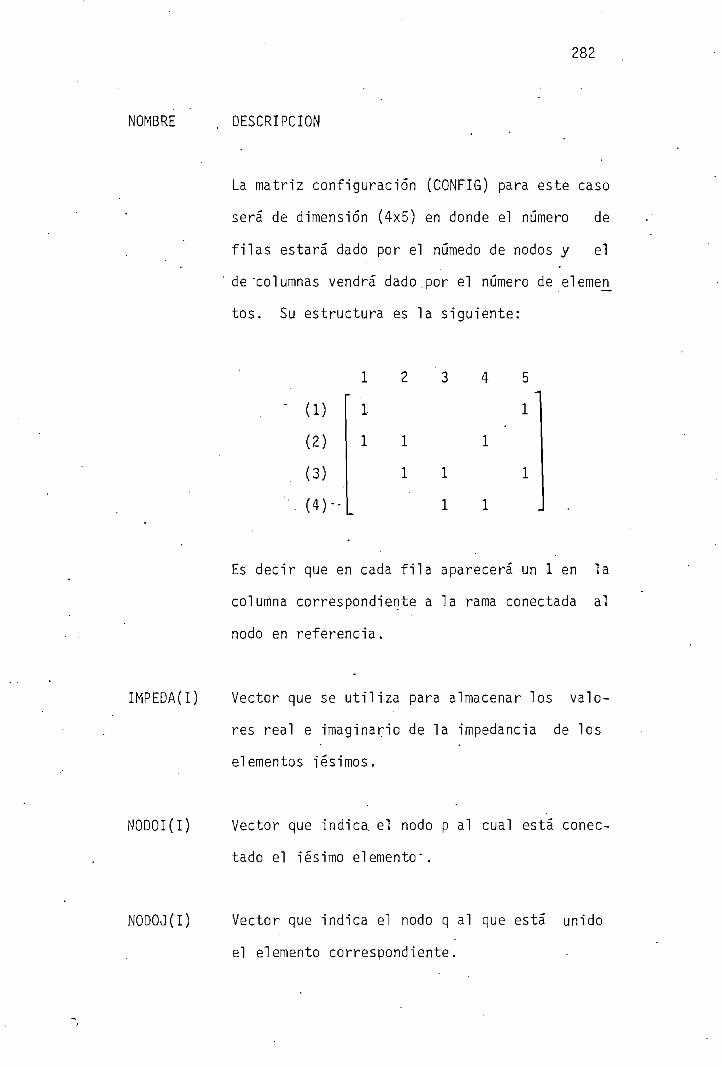
282
NOMBRE DESCRIPCIÓN
La matriz configuración (CONFIG) para este caso
será de dimensión (4x5) en donde el número de
filas estará dado por el númedo de nodos y el
de "columnas vendrá dado, por el número de e!emen_
tos. Su estructura es la siguiente:
1(1)( 2 ) .
(3)
(4)"-
1
1
2
1
1
3
1
1
4
1
1
• 5
1
1
_
Es decir que en cada fila aparecerá un 1 en la
columna correspondiente a la rama conectada al
nodo en referencia.
IMPEDA(I) Vector que se utiliza para almacenar los valo-
res real e imaginario de la impedancia de los
elementos iésimos.
NODOI(I) Vector que indica, el nodo p al cual está conec-
tado el iésimo elemento'.
NODOJ(I) Vector que indica el nodo q al que está unido
el elemento correspondiente.
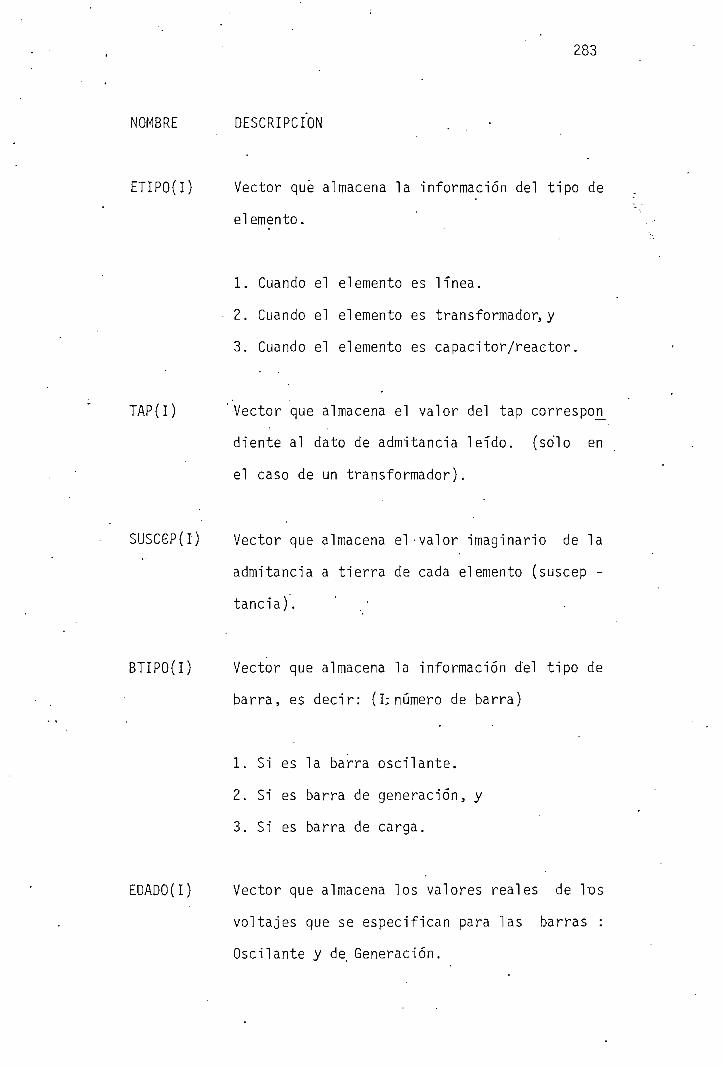
283
NOMBRE DESCRIPCIÓN
ETIPO(I) Vector qué almacena la información del tipo de
elemento.
1. Cuando el elemento es línea.
. • 2. Cuando el elemento es transformador, y
3. Cuando el elemento es capacitor/reactor.
TAP(I) -Vector que almacena el valor del tap correspon_
diente al dato de admitancia leído, (sólo en
el caso de un transformador).
SUSCGP(I) Vector que almacena el'Valor imaginario de la
admitancia a tierra de cada elemento (suscep -
tanda). '
BTIPO(I) Vector que almacena la información del tipo de
barra, es decir: (I;número de barra)
1. Si es la barra oscilante.
2. Si es barra de generación, y
3. Si es barra de carga.
EDADO(I) Vector que almacena los valores reales de lx>s
voltajes que se especifican para las barras :
Oscilante y de Generación.
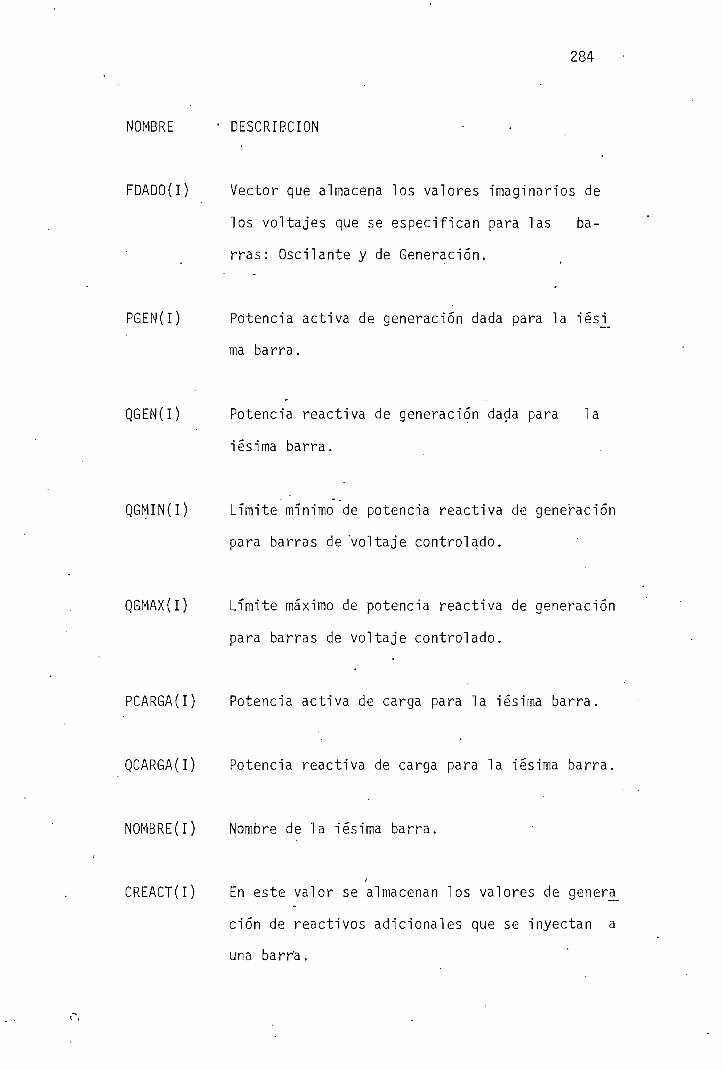
284
NOMBRE DESCRIPCIÓN
FDADO(I) Vector que almacena los valores imaginarios de
los voltajes que se especifican para las ba-
rras: Oscilante y de Generación.
PGEN(I) Potencia activa de generación dada para la iési
ma barra.
QGEN(I) Potencia reactiva de generación dada para la
iésima. barra.
QGMIN(I) Límite mínimo de potencia reactiva de generación
para barras de "voltaje controlado.
QGMAX(I) Limite máximo de potencia reactiva de generación
para barras de voltaje controlado.
PCARGA(I) Potencia activa de carga para la iésima barra.
QCARGA(I) Potencia reactiva de carga para la iésima barra.
NOMBRE(I) Nombre de la iésima barra.
CREACT(I) En este valor se almacenan los valores de genera_
ción de reactivos adicionales que se inyectan a
una barr'a.

285
Con todos estos datos de entrada y el selector SW1 igual a
1 ya se puede correr el programa para la parte de flujo,
de potencia convencional.
Una vez que se obtiene la solución del flujo de potencia -
convencional es posible pasar al estudio de Estimación de
Estado, para lo cual se tomará un conjunto de información
del sistema simulando de esta manera las mediciones;-estas
pueden ser: Inyecciones de potencia a las barras, magnitu_
des de voltaje y flujos de potencia. Así, para la segunda
parte las variables de entrada serán:
NOMBRE DESCRIPCIÓN
NMED Número de mediciones simuladas del sistema.
EMOD(l) Magnitud de voltaje de la barra oscilante.
DELTA(l) Ángulo de fase de la barra oscilante o de re_
ferencia. Este valor siempre será igual a 0.
I Número de la medición, y varia de 1 a NMED.
MTIPO(I) Vector que almacena la información sobre el
tipo de medición que se ha simulado, así toma_
rá valores de:

286
NOMBRE DESCRIPCIÓN
1. Si la medición corresponde a inyección de po_
tencia activa a la barra (potencia neta).
2. 'Si la medición corresponde a inyección de po_
tencia reactiva a la barra.
3. Si la medición corresponde a flujo de poten_
cía "activa. • .
4. Si la medición corresponde a.flujo de poten_
cía reactiva.
5. Si la medición corresponde a magnitud de
voltaje de alguna barra.
En caso de que la medición sea del tipo 3 o 4
se deberá especificar si el flujo es en una lj_
nea o a través de un transformador, entonces
la variable tomará valores de:
1. Si la medición de flujo de potencia es a-tra_
vés de una línea,.
2. Si la medición de flujo de potencia es a tra_
vés de un transformador.
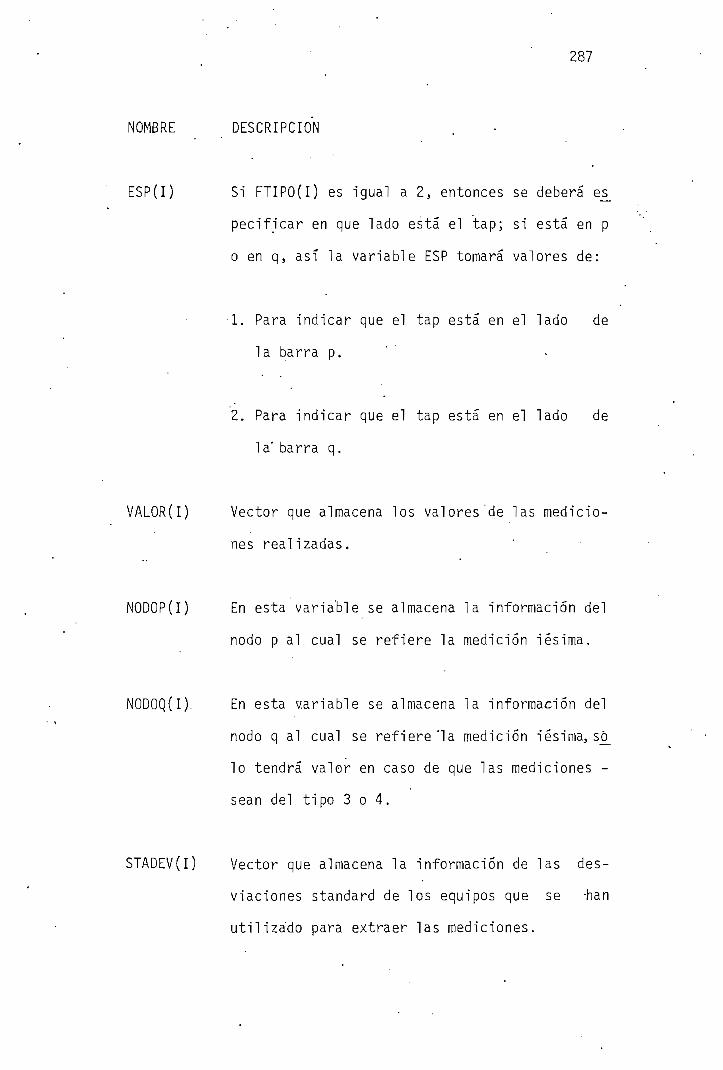
Z87
NOMBRE DESCRIPCIÓN
ESP(I) Si FTIPO(I) es igual a 2, entonces se deberá e¿
pecificar en que lado está el tap; si esta en p
o en q, as! la variable ESP tomará valores de:
•1. Para indicar que el tap está en el lado de
la barra p.
2. Para indicar que el tap está en el lado de
la' barra q.
VALOR(I) Vector que almacena los valores'de las medicio-
nes realizadas.
NODOP(I) En esta variable se almacena la información del
nodo p al cual se refiere la medición iésima.
NODOQ(I). En esta variable se almacena la información del
nodo q al cual se refiere "la medición iésima, só_
lo tendrá valor en caso de que las mediciones -
sean del tipo 3 o 4.
STADEV(I) Vector que almacena la información de las des-
viaciones standard de los equipos que se -han
utilizado para extraer las mediciones.
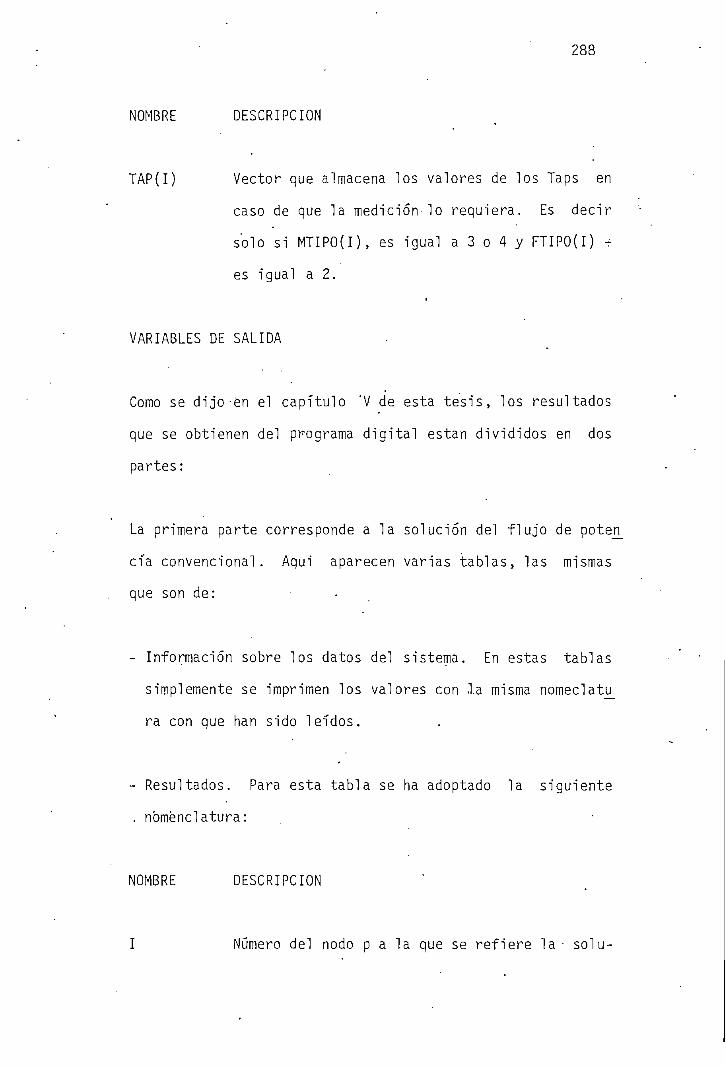
288
NOMBRE DESCRIPCIÓN
TAP(I) Vector que almacena los valores de los Taps en
caso de que la medición-lo requiera. Es decir
solo si MTIPO(I), es Igual a 3 o 4 y FTIPO(I) -r
es Igual a 2.
VARIABLES DE SALIDA
Como se dijo-en el capítulo 'V de esta tesis, los resultados
que se obtienen del programa digital están divididos en dos
partes:
La primera parte corresponde a la solución del flujo de poten_
cía convencional. Aquí aparecen varias tablas, las mismas
que son de:
- Información sobre los datos del sistema. En estas tablas
simplemente se imprimen los valores con .1.a misma nomeclatu_
ra con que han sido leídos.
- Resultados. Para esta tabla se ha adoptado la siguiente
. nomenclatura:
NOMBRE DESCRIPCIÓN
I Numero del nodo p a l a que se refiere la • solu-
289
NOMBRE . DESCRIPCIÓN
clon, este valor varía de 1 a NODOS.
NOMBRE(I) Nombre de la barra I.
MODULO(I) Valor de la magnitud del voltaje de la barra I.
ANG(I) Ángulo de fase del voltaje de la barra I.
PGEN(I) Potencia activa de generación.
QGEN(I) Potencia reactiva de generación.
PCARGA(I) Potencia activa de carga.
QCARGA(I) Potencia reactiva de carga.
CREACT(I) Valor real de potencia reactiva que se inyecta
a una barra por acción de 'un capacitor o rea£
tor.
J Numero del nodo q al que se refiere la medi-
ción.
NOTA: Se usa solamente para especificar el va_
lor de la barra hacia donde se dirige el flujo,
290
NOMBRE DESCRIPCIÓN
su nombre y el valor de los flujos de potencia,
NOMBRE(J) Nombre de la barra correspondiente al nodo q.
POT(L,J) Flujo de potencia activa por un el emento de- in_
terconexión, la convención de signos que se
útil iza es:
+ : el flujo sale del nodo p y llega al nodo q
- : el flujo sale del nodo q y llega al nodo p
PREAC(I,J) Flujo de potencia reactiva por un elemento de
interconexión, la convención de signos es igual
a la mostrada en el caso del flujo de potencia
activa. .
RELTRA(-I3J) Variable que indica él valor del tap de un trans_
formador conectado entre los nodos p y q.
NOTA: Si el flujo es a través de un transforma_
dor desde el nodo q a p, no se especifica el
valor del tap a pesar de que este ha sido con_
siderado en el cálculo.

291
La segunda parte que 'es la más Importante de este estudio ,
consta también de varias tablas, a saber:
- De Información.- En esta tabla se imprimen los valores
que han sido simulados para ser evaluados por el estima-
dor. Su nomenclatura es la misma que se utilizó en la en_
trada de datos.
- De resultados.- Una vez que las mediciones empiezan a ser
evaluadas por el estimador, puede que al llegar a la fase
de detección de datos erróneos,en efecto se detecte algu_
na o algunas mediciones erróneas. Entonces para informa^
ción del usuario se muestra un reporte de los datos que
han sido eliminados de. la estimación, los mismos que deb£
rán ser estudiados para conocer Ja causa que ha provocado
el error de éstos. La nomeclatura" que se utiliza se mue_s_
tra a continuación:'
NOMBRE DESCRIPCIÓN
INDIC Variable que indica el número de la medición
que ha sido deshechada del proceso.
NODOP(NMED) Nodo p a la que se refiere la medición que es
eliminada. .
NODOQ(NMED) Nodo q a la que se refiere la medición que es

292
NOMBRE • DESCRIPCIÓN
eliminada, solo se usa si la medición es de flu_
jo de potencia.
VALOR(NMED) Valor de la medición eliminada antes de obtener
la solución que nos da los mejores estimados de
las variables de estado.
Cuando el estimador ya. no detecta ninguna medición errónea ,
se termina el proceso de estimación: •
- Algunas veces no se obtiene convergencia por incoherencia
en los datos de entrada o "por falta de redundancia. En es_
te caso aparece un mensaje indicando la razón por la cual
no se han obtenido los mejores estimados Dependiendo de
.la causa que provocó estos resultados se tomarán las accip__
nes correctivas y se correrá" nuevamente el programa.
- Si todo estuvo correcto se obtiene convergencia., enton-
ces aparecen las siguientes tablas:
- MEJORES ESTIMADOS.v- En ella se muestran los valores de
magnitud y ángulo de fase de los voltajes de barra estima_
dos.
La nomenclatura es:

293
NOMBRE DESCRIPCIÓN
I Numero de -la barra; varia de 1 a NODOS.
EMOD(I) Magnitud- del voltaje de la barra I.
DELT(I) Ángulo de fase (en grados) del voltaje de la
barra I.
- TABLA DE COMPARACIÓN DE DATOS Y CALCULO DEL ERROR
En esta tabla se muestran los valores medidos y calcula-
dos una vez que se obtuvo la convergencia.' Así mismo se
muestra el cálculo del error relativo de los valores me_
"didos con respecto a los calculados.
La nomenclatura es la siguiente:
NOMBRE DESCRIPCIÓN
I Indica el numero de la medición, este valor va_
ría de 1 a NMED. Cabe indicar que el valor
NMED dado inicialmente es disminuido de acuer-
do al número de las mediciones que se deshechea
MTIPO(I) Al igual que en la entrada de datos, esta va-
riable indica el tipo de medición que se ha
realizado.

294
NOMBRE DESCRIPCIÓN
NODOP(I) Indica el nodo p de la iésima medición.
NODOQ(I) Indica el nodo q de la iésima medición.
VALOR(I) Indica el valor medido o simulado.
VCALC(I) Indica el valor calculado en base a la solu-
ción de los mejores estimados.
PROMED(I) Indica el error relativo entre el valor medido
y el calculado una vez que el algoritmo de Es_
timación de. Estado converge ; .
(%) = Vmed - Véale „ 1QOVmed.
PROMED(I) Indica el valor del error relativo de la medi-
ción.
Por último aparece una tabla similar a la mostrada en el cáj_
culo de flujos de potencia, con la diferencia de que sus va_
lores se calculan en base a los mejores estimados obtenidos
al aplicar la teoría de Estimación de Estado.
La nomemclatura es la misma que se utiliza en el caso de flu_
jos, pero ahora todos los valores son extraídos de la Subru

Z95
tina ESTIMA.
A.5. FORMA DE PROPORCIONAR LOS DATOS AL PROGRAMA
Los datos del sistema deben estar dados en las siguientes -
unidades:
Para el caso de Flujo:
1. Los valores de impedancia de los elementos de la red de_
ben estar en por unidad, así mismo los valores de susce¿
tancia.
Z. Los valores de: potencia de generacións potencia de car-
ga y límites de potencia reactiva de generación se darán
en por unidad.
3. Los valores de potencia reactiva adicional que se genere
en alguna o algunas barras se darán en valor real (MVAR)
4. Los datos de voltaje que se especifiquen para la barra
oscilante y las barras de generación se darán en p.u. y
en coordenadas rectangulares.
5. El nombre de cada barra deberá tener como máximo 6 cara£
teres.

296
6. Los datos-de los taps de transformadores se darán en p.u.
Cabe indicar que este valor se tomará de acuerdo al cir_
cuito equivalente que se muestra a continuación:
Supongamos a un transformador r conectado entre las ba-
rras p y q.
FIG. A . -
©
F I G . C . -
nr (nr-1 ) Yr
nf ; Va l o r d el tap (p.u)
1: n.,AM/-
•z : I m p e d a n c i a de l'et e m e n t o
-WV-
nr,Yr
(1-n r } Y r
Aquf se indica que un transformador r conectado entre los
nodos p y q con el correspondiente tap nr localizado en el
lado de la barra p, para regular el voltaje de la barra q
(FIG. A), puede ser representado como en la FIG. B; es d_e_
cir, por un autotransformador ideal en serie con una rama,
297
con lo cual' se consigue afectar solamente a la admitancia
propia del nodo aT cual . tal transformador esta conectado
y a la admitancia mutua asociada a la rama en mención.
Esta conexión puede a su vez ser representada por el equi-
valente TT (FIG. C), que es el equivalente que hemos utili-
zado en esta tesis para el tratamiento de un transformador
con taps.
Para la parte de Estimación de Estado, los datos deben es_
tar en las siguientes unidades:
1..E1 valor de la magnitud de voltaje de la barra oscilan-
te debe darse en p.u.
2. El ángulo de fase de la barra oscilante es 0.
3. .El valor de la desviación'standard debe darse en valor
real, es decir, si la precisión del equipo es de +3 uní
dades para un equipo con escala máxima-de 100 unidades.
El valor de la desviación standard para un 99% de con-
fianza será de 1.0.
4. El valor del tap debe darse en p.u.
5. La barra oscilante deberá ser siempre la número 1.

298
6. El valor de la medición se dará en p.u. .
La forma de proporcionar los datos al programa y los forma-
tos utilizados se muestran en las hojas de codificación ad-
juntas: Esquema. 1.
A.6. FORMA-DE UTILIZAR EL PROGRAMA GRABADO EN DISCO Y EN CINTA
Para utilizar el programa grabado en disco- y en cinta se
deben perforar las tarjetas de control que se muestran en
el esquema 2 y 3.
A.7. RESTRICCIONES
La función del programa digital en esta tesis radica en in_
troducir los conceptos de 'Estimación de Estado en la eva-
luación del estado de un sistema de potencia, por tanto no
ha sido optimizado; sin embargo se presenta a continuación
un conjunto de restricciones que en el futuro deberán ser
estudiadas en detalle para mejorar el programa y hacer de
éste una herramienta muy útil en la evaluación y control
de un sistema eléctrico de potencia en tiempo real.
- El programa por ser demostrativo, fue diseñado para ope_
rar con sistemas de 25 barras y 35 elementos en la parte
de flujos de potencia convencional y para la parte de E_s_
timación de Estado, acepta un total de 80 mediciones del
sistema.

299
- No se ha realizado ningún análisis de porosidad de matri_
ees.
- Se considera un solo elemento de interconexión entre dos
barras.
- Por -utilizar una gran cantidad de matrices, este progra-
ma ocupa bastante memoria.
- Por las constantes operaciones a realizar entre matrices,
la ejecución del programa es"lenta.
A.8. EJEMPLOS
En el capitulo correspondiente a"Ejemplos de'Aplicación" se
muestranlos ejemplos realizados por este programa y los re_s_
pectivos resultados, los mismos que han sido analizados en
detalle.
Las hojas de codificación para cada ejemplo se muestra en -
los esquemas 4, 5 y 6.
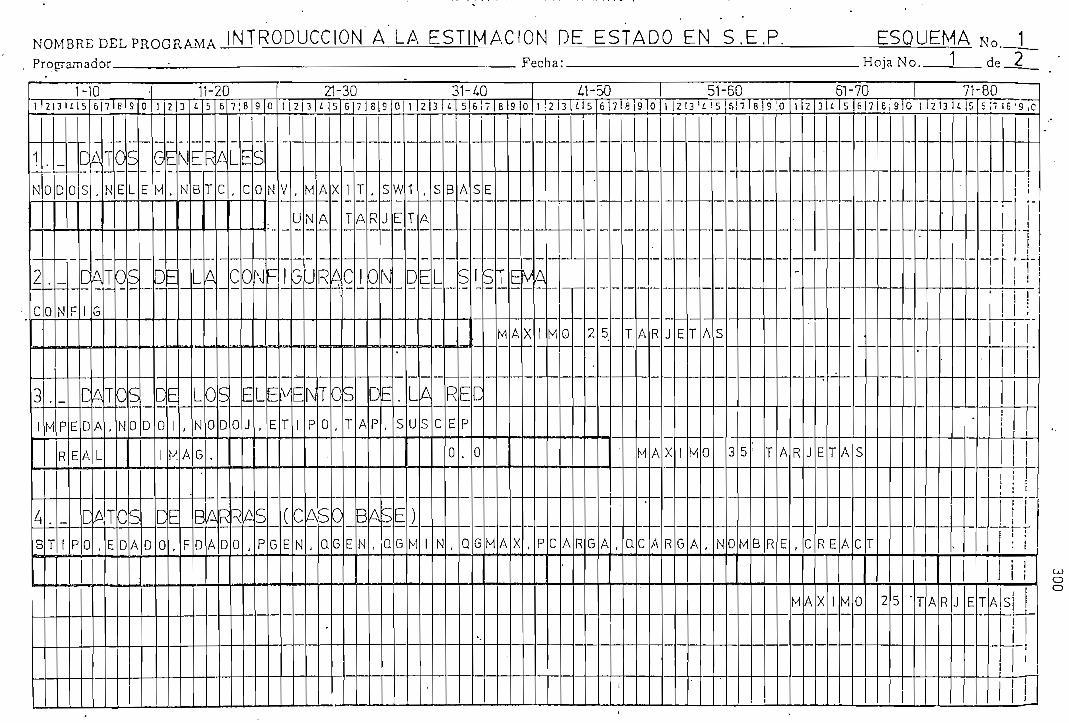
NOM
BRE
DEL
PRO
GRAM
A IN
TRO
DU
CC
IÓN
'A L
A ES
TIM
AC
IÓN
DE
EST
AD
O EN
S
.E.P
. ES
QU
EMA
No._
lPr
ogra
mad
o:
: ,_
Fe
cha:
H
oja
Nn.
1
de_
¿
1-10
1 1 N 2 /~< 3 i A B
2I3
U1
5
0 0 M T
-i N P R [0 F E E P
5 3 _ - D A C 0
6 A A r~ >O A A L £ ,
7 8
19
T N T T , T E
0 E r\ r\ N f~\ D
s _ s s 0 s A
0 E D D
11-2
0i G "i -\y 0 ! C 0
2 3
- * P r- I M EM N j A F
¿ B N G B D
5 T A r\<
0 . A A -
6 A c s D A D
7¡8 L , /~
v 0 *\
:
— Q 0 P J A
9 S 0 N L , C" PQ N P E - G
21-3
02
|3
V V T ( E
, U G - i p N
M N J N p A ,
¿ 15
A A R T 0 s Q -X A ¿TÍ -,
r\ , r\ G
6 1 T C S T E
7 8
T A A B N
( R 0 -J p A ,9 S J N — , - Q
Q -- w c- S E G
31-4
01
2¡3
¿ 5
1 T D L u ) M
( A P A s !
S L c N
B — R E 0 (
A S E p - Q
6 7
S 1 C 0 G ..
E S M
eig^
D
T M A
E A X
M X -
41-5
01
2 3
¿ 5
"7 A i p
— i
M C
0 A
— i
- R
2 — G
6 7
a 9
10
5 A
_ ( :
— T Q
A M C
R A A
51-5
01
12
!3 U
15
5
7
8
J X R
E 1 G
T M A
A 0 t
- S N
3 0
5 MB
9 T R
0 A E
61-7
01
2
- R . M
J C A
3 ¿
ÍS
E R X
T E 1
A A M
el7i
e
S C 0
T
2
9|G
5
71-8
0I
¡21
3 ¿
[5
TA
RJ
- • E
5 17
¡S '
3 ,
C
- T
- i "í
u 1 i
i
í i
. . ir i
i -j :
A
is
- i
! 1OJ o o

NOM
BRE
DEL
PRO
GRAM
A IN
TRO
DU
CC
IÓN
A LA
E
STIM
AC
IÓN
DE
ES
TA
DO
EN
S.E
.P.
ESQ
UEM
A N
o._L
Pro
gram
ador
l_
. F
echa
: H
oja
No
._Z
__
de_
¿
ll 5 5 N 5 M
21 . M T
31
1 E 2 i
i M D P
-1 5 c , 0
0 6 A F ,
71 T ^ M P F
el 0 A 0 A T
9 s T D T i0 0 { 0 P
__, s 1 s 0
2 p ) ,
3 G , D E
1 ¿ — D - S
-; 5 A \ E P
20 6 ; E L \ ,
7!
"< T — V
8 V A A ^ A
9|
- L ( u -0 _^ 1 N /•> w 0
o ) A R
2 /->,
/•> w ,
3 ! . T N N
2 ¿i 0 A — 0 -1- 5 [v R -. s D
3C 6 E j 0
7 I S E Y p
81 T ,
9 q A T N
0 ! 1 0
i V D
2l
U 0 0
3 Q
3 ¿ A ,
1- 5 D s
¿c D
1
A T .) 7 S A M
el
D A
9! D E X
0 P V 1
i i , M
2 T 0
3 S A
¿ ¿i I P 8
1- 5 S • 0
50 6 T
7 p T
a V A
9|
A R
0 J
i Y E
2 T
3 S A
c
L , U s>1-
55( s ED 7 S
8 P
9 p í
0 C
1 12 F
3 1
(L C
51-
5 A
7C 6 C) 7B 0
9 N
01
23 -
i
L
1\-8 6
0 7 ~ ¡ts r i T i
S i iiC 1
-] ¡ •
co o
INS
TIT
UÍ U
üfc
IN
f-U
RM
AT
ICA
YC
OM
PU
I A
CIÓ
N
Pro
£ram
ador
AMA
INTR
OD
UC
CIÓ
N A
LA
ES
TIM
AC
IÓN
DE
ES
TA
DO
EN
S
.E.'P
._
F
echa
:E
SQ
UE
MA
N
o._
2.
Hoj
a N
o --
] _
d
e _ !
1-10
1 2
Í3U
5
/ / ?> / / / b *
/ / 2 / *
1? tí V y 4 í? M
& sj ^ A - M
- 0 - s X 2
s¡y
6 B B S E S E
71
61
9
L 3 C G C
D N tí N V
! & fe
0 - J S \ - S
11-2
0i T S Y Y
2 A Y s D 5
3 R s c A c
¿ 5
J - L T L
P B 0 B -
6 T -- i 1 s -
7¡B A ' X u
i S p ' A
9|0
R 1c 0 6 -
21-3
01
2|3
-^ G 0
R i
w A -
¿1
5
0 M
5¡7
8 i N
T
A
,S
R fr -0 D
9 E
0 - bí
31- ¿
0i 3 E — —
2 A L
3 ¿
5
R E
i
A cT
b i
/
^ R .
T i
8¡9
0
i
C -
A
í •
¿1-5
0I
2
3
¿1
5i z A
•
X- • -
51-5
06
17
3¡9
10
1
|2
3 "¿
¡5
Sj?
l8
L _
—
FR
0G - -
RA
• MA -
C0 .
9 N
0 -
61-7
01
2
EL
3|£
5
Di
6I7
IBJ
91
0
gC0
(
71-8
01
1213
U
|5 - •
6 17
i£
'9 ,
C
- - --
i í- ; i i i
-
L ¡ -í 1
i '
I i i
ii
t i i
— i j—
i
i- -O

NO
MB
RE
DE
L P
RO
GR
AM
APr
ogra
mad
o):..
INT
RO
DU
CC
IÓN
A
LA E
ST
IMA
CIÓ
N
DE
'ES
TA
DO
EN
S
.E.P
. E
SQ
UE
MA
No_
J_. F
ech
a:_
: H
oja
Nn.
1
de
1 _
1-10
1 ¡2
I3Ü
Í5
/ / S / ti / ; / / / , / K X
/ / S / b / / / / K í* .A b h
ti £ & ti b fci
ti tí b tí S
j P M 0 A E E A E M 5
- 0 A T D 1 C X X S X T u L.
&!7
ieÍ9
¡0
- B U c T T E E 5 E C E
- S bt i c c G C ti 0
- - £ F 0 0 u tó N R ..
" '¿ s N N F L y E
— 0 F ti tí F N s 1 J w I
11-2
0H
2
T 3 1 L _, 0 K Y 7
A £ X i A R £ S D X
3 R R ' N N T D 1 A i
M5
J A 2 K C R T P T 2p D 8 T E A T 0 - 8
6 T 0 0 N L N - c 0
7¡B
A R i 0 > X 1
1 s fe L N '
9 C 1 0 0
0 2) A S M 0
21-3
02
- R T A C
j P i
3 L
¡5
/•* w A
^ ^j R -
\
,51?
8
T L
*X - A
0 fo
9 Q -
0 - 1 -
31-¿
0!
2|3
U
5 5
¡7
8l9
0
3 N - — —
A T
R A
A tsD
u E _ .
T bE
L
I E
¿1-5
01
2 13
ÍÍ
5J
6 7
a 9
lo
z c -A T
-í RI
- C — —
L A^ ._
P N
•<0
51-5
01
UU
!¿ '
5
^-- b - —
R .A -
, v G
A R
517
le
A
/~\<
C
0 i
9|0 N A i
S
61-7
0lU
U ¿
5
LAC
6|7
|el9
lG
KT
A -
71-8
0i
2 1
3 l¿
Í5
J6
Í7 ¡
S!9
,C
- -
- i i..
1
,-_
\
1 '
_[
• i
i i~i~
~ 7
i •
i i
! i
i
— í.
i 4. | 1
1
-1
,
| ~ 1
OJ o

NO
MB
RE
DE
L P
RO
GR
AM
A
INT
RO
DU
CC
IÓN
A
Prog
r am
ador
,
LA
ES
TIM
AC
IÓN
DE
ES
TA
DO
EN
S.E
.P.
Fec
ha:.
ES
QU
EM
A p
f0._
4_H
oja
Nn
. 1
de
¿.
1-10
i ¡2
!3 i
£l5
1 1
5 1 1 11 1 1 0 0 0 0 0 r» o 0 3 0 0
0 1 1 , . • • .
1 1 0 1 0 0 2 7 r
.c - 1
o 0 -
6 1 I
fil9
0
- 1 1 1 8 2 9 8 2 0
1 1 0 3 7 2 3 5
0 1 -
1 - „ -
0 1 3 2 7
11-2
0
1 0 0 0 0 0 1 0 A 9 8 0
2|3
- . . - • - . -
tt 2 3 5 A 3 6 0 1 1 5 5 0
£ *> 0 7 1 0 0 A 5 3 0 0 0
5 A A 0 8 7 0 0 0 "- 0 0 0
6 " "K 3 - -
7¡5 Q A 1 -
i S 0 1 i A 5 2 & 6 1 4
9 £• 0
0 ^ 6 4 6 5 3 3 2 7 7 7
21-3
01
12
P —^ 1 1 1 2 1 1 2 3 o o
3 R _
3
£ ¡5
S 0
I -. 1 1Gj7
8
|9|0
R • .
I A 0 ip \ 2 0
y A 5 0
A -
31-4
01
|2Í3
£
5 6Í
7 8
J9
0
D -
1 D -
~
N
6
.EN
pA - —
R -R -
Al -
50
! 2
Í3¡¿
5
i
-
S r-q
s0 •
51-5
06
7 9
9 JO
1
|2!3
U
15
|S
|7
8
-
d - -
eP
1 -
Ui> 0
s-—
.
9 1
0 -
61-7
01
23
£ 5
617
B - N
9¡0
0
— R
71-8
01
I2 1
3 U
¡5
T
- H
-- •
5 17
16
!9 ,
C
- !;- i "
- . ^
i 1 •• 1• 1 i
í
i
T ! 1
1 ; !
i <
i ! Í
i
i
1 l
i '
CJ o -p*

NOM
BRE
DEL P
ROGR
AMA
INTR
OD
UC
CIÓ
N A
Pro
pram
ador _
,
LA E
ST
IMA
CIÓ
N D
E E
ST
AD
O
EN
S
.E.P
.E
SQ
UE
MA
N
Fec
ha;
Hoj
a N
n.
de_
J¿_
1-10
1 ¡2
13
Ü5
1 3 3 2 3 A 5 1 -i 9 A 1 33 2 3 3 3 5 1 -i 2 2 1 1 1 o n
1 -í - 2 1
1 1 .. - 1
6
7-
81
9 0
1 0 - - - - - „ - -
0 5 0 0 0 0 0 0 0 0 0 0 0 0 0 0
- • . . . - . . . -A 0 1 3 1 c c A - 0 1 0 3 0
- A 8 8 9 5 3 0 8 5 0 2 6 0 0
11-2
01
|2
0 0 3 8 5 5 5 0 0 5 A 0 9 9 0 A
- • 1 3 A 8 5 0 0 0 1 ] 9 8 0 8
3 0 0
¿ 0 0
5 - -
6 - - -
7:8
-
9 |0
0 1 A 3 6 2 6 A 6 2 3 2 5 5 A
- - - _.
21-3
0Z
¡3
U ¡
5
5 A 6 2 6 1 3 2 A 5
00
1 1 1 1 1 1 1 1 1 1 1 1 1 1
. . . . • • - - . . . -
5 0 0 0 0 0 0 0 0 0 0 0 0 0 0
7 8
|9|0
_ --
-- 1 1 - - 1
31 -¿
0
-1
2 3
U
5 6
¡7
8l9
0
- . - .
1 1 0
0 0 25
- - - _
- - .
iT 0.
1
Al-5
0 I
51-5
0I
2 |3
£
¡S
0 -
—1
-0 -
6 7
Í8
9 JO
a
...
-0 0 0
, - .
I |2
!3Ü
"5
5 5 3 - -
5 0 0
0 0 0
- -
ni 7
1 8
—
.
9 0 0 0 - *
0 . . ..
61-7
01
l2|3
£
5
1 0 1
3 5 8
0 0 0
6I7
I8
•-
-
M S L
9lC
A E 0 U A
! L U L K
71-8
0 "^
i 2
13 !
£ ¡5
N M T M E
H
-
5 ¡7
I6
'9 .
C
i
i
. — '
i i i i i
- i... .
t
í i i
* i
i i i
i i
i
í
O un

NOM
BRE
DEL
Pro
gram
ado:
.
AM
A ..I
NTR
OD
UC
CIÓ
N
A L
A E
ST
IMA
C I
ON
D
E
ES
TA
DO
EN
S
.E
. P
.__
___ -
: - F
echa
: - : -
ES
QU
EM
A
Ñ0.
JAH
oja
Nn.
J
de
¿
1-10
1 2
I3U
5
3
1
I
-
-
6I7
'6'9
|0
-0 -
-2
9
11-2
01
Í2Í3
¿
5
5 -
3 %
6 .. - -
71
8
_
9 5
0 -
21-3
01
2
3 -
•3 L
¡5
-• -
1,
G 0
7 8
|9i
-
0 -
31-O
)1
2 3
¿|
5|6
¡7
8 9
0
_ -
-_
*
-
¿1-5
01
-2
3 ¿
5
_0
B *»
S
•
51-5
06
1?
8 ¡9
10
1 |2
¡3
l¿ '
5 |
5!7
U
ER ._ '
- VA
c1 _ .
0N
:L U T L C B P
0 L E U 1 L A
S T C A E R
I C 1 A
9 D M U 0 E 5
0 0 0 A N N 1 E
61-7
01
!2|3
¿
5
S S N M S
D D D U T
F S 0 E ! L I -
0 E L C A M
R S H R A
6|7
E
M L E F 0 • R
A L L L
T E C U C A E
9¡0
0 N 0 J A S L
S A N 0 S
71-8
01
12
13
N 0 0 M S
D C D E 1
E S E E E- D S
¿'5
0 S 1 T
D L L P C E -
6 ¡7
¡6
É9
C
A A A 0 P 1 M _ i _:
T M ._ T
0 — E S ~ E
i L S; *' S —
iN
OS i|
ol^s
A. i 1 T
•
i_
~!
i i
i ; i i i
L ii
1 iOJ o en
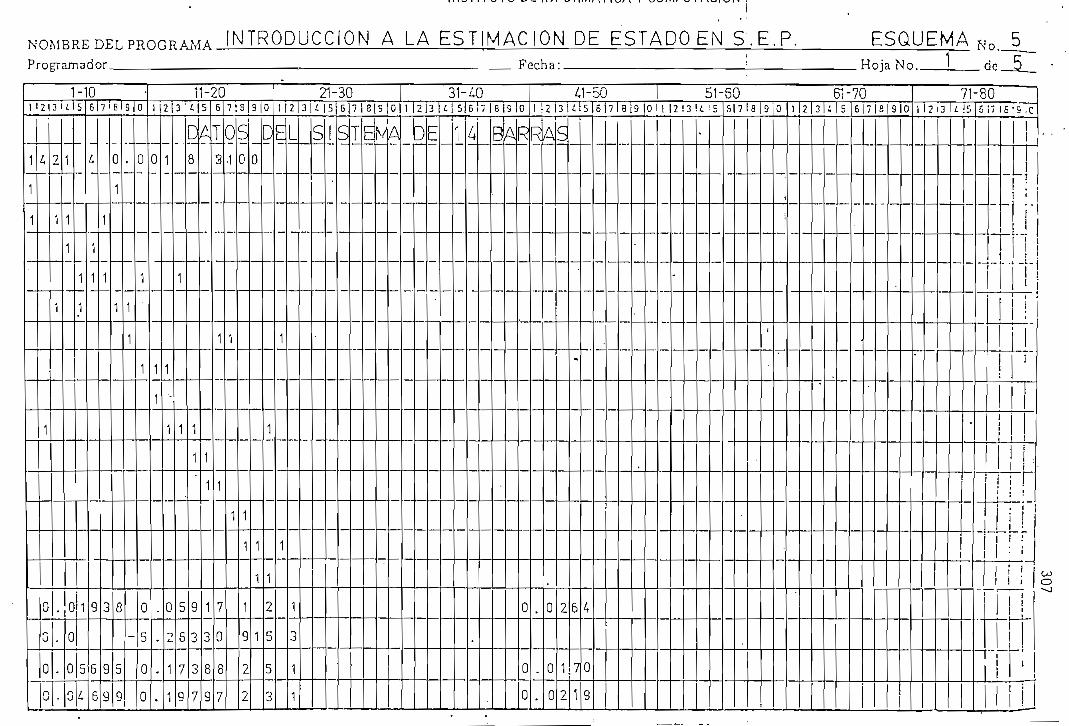
i M
UÍ
WIV
NO
MB
RE
DE
L P
RO
GR
AM
A _
[_N
TR
OD
UC
C I
O N
A
Prog
r am
ador
.
.
LA E
ST
IMA
CIÓ
N D
E E
ST
AD
O E
N S
:.E.P
.E
SQ
UE
MA
N
o._5
Fec
ha:
Hoj
a N
o
1-10
1 '2
13
U
5
1 1 1
4 1 0 0 0 0
2 1 1 . •1 1 1
- 1 1
01
0 0 0
c 4
6l7
'El9
0
H
1 1 g 6 6- 1 1 3 9 9
0 1 1 8 c C
— 1 1 -
0 1 1 0 5 0 0
11-2
0|2
|3
0 - 1 1 . . •
1 1 1 0 2 1 1
1 1 5 6 7 9
MS
D 8 1 1 g 3 3 7
— , .. - 1 1 1 3 8 c
G T 3 - 1 - 1 7 0 8 7
71
8
0 1 1 1s 0 1 i 1 c 2 2
9¡0
0 - 1 1 1~N
_•- 1 - 1 2 5 5 3
21-3
02
^ - 1 _, 1 —
1 3 1 1
3 i
|5
-
S —
[ - —
6|7
¡8|9
S - _ -
T --
-V
0 A -
31-¿
0I
2Í3
¿
5|ó
¡7
8Í9
0
- —
Dp -
i -
¿4 - - .
1 3A -
-; 0 0 0
41-5
01
UÍ3
UÍ5
^ - '
A — 0 0 0s _ 2 1 2
- -• 6 7 1
— - - 4 0 9
6 7
8 ¡9
10
-
— -
— —
—
51-5
01
!2!3
i¿!5
__ -
-
-
_
5! 7
8
9 0
-
i ¡
- -
61-7
0I
2
-
3 ¿
56
I7IB
9
10
-
•
- -
71-8
01
12 ¡
3 ¿
!5
-
- - •
5 ¡7
IE
'9
:C
- "
-
- — i
—
L I i..-.
i 1
_. i i !
'. Í i
t . i
1 Í t
__ i ii
i i
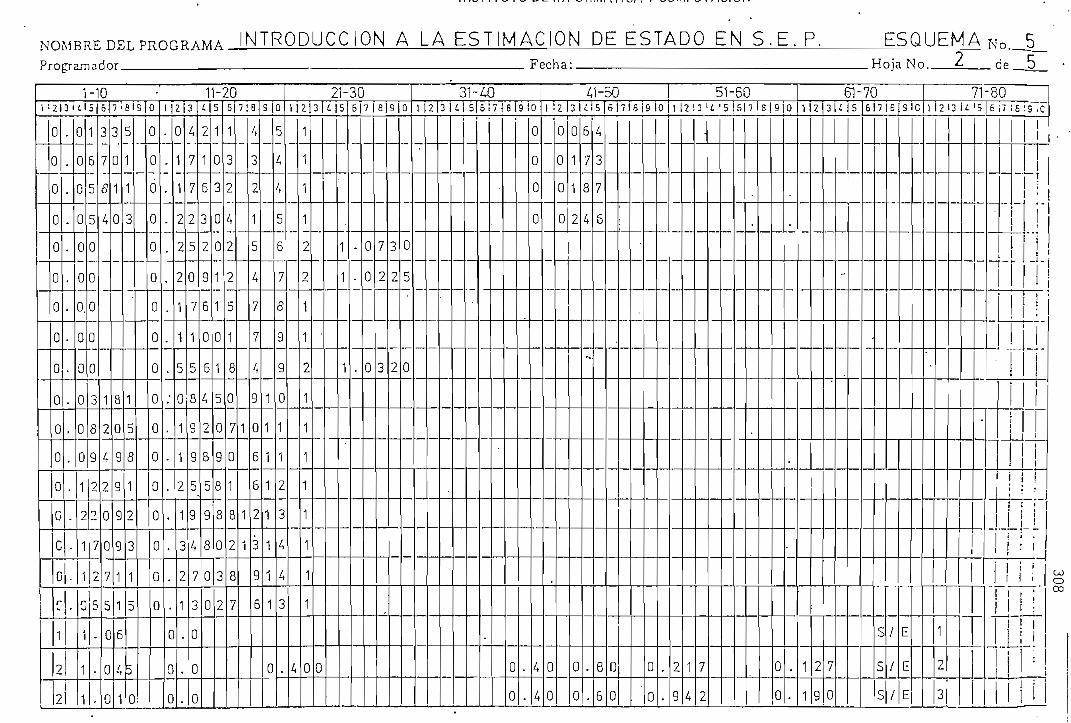
1 1
>V
J I
I I
NO
MB
RE
DE
L P
RO
GR
AM
A.
Prog
r am
ador
INT
RO
DU
CC
IÓN
A
LA E
ST
IMA
CIÓ
N
DE
ES
TA
DO
E
N
S.E
.P.
ES
QU
EM
A*»
5
Fec
ha:.
Hoj
a N
o._
2_
_d
e_
JL
1-10
1 2
Í3
i!5
J6
7
'Bl9
0 0 0 0 0 0 0 0 0 0 0 0 0 c c. . . . ' . - . , . . . -
0.
r 1 2 7
. i0 0 0 0 0 0 0. 0 0 0 0 0 1 2 1 1 G 1 1 11 6 5 5 0 0 0 0 0 3 8 9 2 9 7 7 5 - ,
3 7 3 A 1 2 A 2 0 0 7 5 0 0 03 0 1 0 - 8 0 c 9 9 c 1 1 6 M 1
5 1 1 3 1 5 8 1 2 3 1 5 5 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
11-2
0|2
|3
. • . . . . . ; , - • . , . 0 0 0
0 1 1 2 2 2 1 1 5 0 1 1 2 1 - ¿_ 1 . .
A 7 7 2 5 0 7 1 5 8 9 9 5 9 A 7 3 0 0 0
<|s
2 1 6 3 2 9 6 0 6 A 2 8 5 9 8 0 0
1 0 3 0 0 1 1 0 1 5 0 9 8 8 0 3 2
6|7
!B
1 3 2 A 2 2 5 1 8 0 7 0 1 0, V. 2 8 7
1 1 1
A 3 2 1 5 A 7 7 A 9 0 6 6 2 3 c 6
s - 1 1 1 1 1 1 1 1 0
0 5 A A 5 G 7 S 9 9 0 1 1 2 A A 3
21-3
01
U|3
i
|5|6
|7|8
I9
A
1 1 1 1 2 ? 1 1 2 1 1 1 1 1 1 1 1 00
1 1 1 -
- - .
0 0 0
7 2 3
3 2 2
G - - 0 5 0 -
31-4
01
23
£
| 5
5I7
UÍ9
¡0
_
--
—
.
0 0
. .
0 0 0 0 A A
¿1-
501
2 t3
l¿
5
_ 0 0
0 0 0 0
0 1 1 2 0 0
6 7 8 A <•> . •
A 3 7 6 - 8 6
51-5
06
J7
I8Í9
ÍO
1
|2!3
l¿
'5
|.S
|7
S|9
IO
_ 0 0
- -
—
0 0.
- - 2 9
1 A
- 7 2
-
0 0
. . . •
61-7
01
2
- 1 1
2 9
3 ¿
5
— 7 0
-
—
5I7
IB
S S s
/ / /
sic
E E E
71-8
01
2 '3
t¿
'5
1 2 3
_- •
I i
5 ¡
7 !£
!S
,C
- -• -:
-
-- . —
~ T i
_¡_
i i i
! i i
í i 1i
i i t
i_
{_!
i •
' '
Ii
i !
! I
-L i1
i i
i
OJ
o CO

NO
MB
RE
DE
L PR
OG
RA
MA
IN
TR
OD
UC
CIÓ
N
APr
oc-a
mad
or
.
LA
E
ST
IMA
CIÓ
N
DE
ES
TA
DO
E
N S
.E.P
.E
SQ
UE
MA
Fec
ha:.
Hoj
a N
o..
No.
3_
de
5
1-10
1 ! 2
1 3
U
5
3 1 1 4 2 3 - 1 13 3 2 3 2 3 3 3 3 3 3 1 1 1 i
1 1 1- •
6
71
61
9 0
0 0 0 - - — -
7 9 6 0 0 0 0 0 2 0 0
- • - - . . . .
0 0 0 1 2 3 1 2
0 0 A 6 3 2 3 9
11-2
0
0 0 0 3 5 3 3 r C
2
3 • ' . 0 3 8 0 0
0 0 0
í, S
0
- -
6 - _ -
?;B
-
1
9 7 8 9 9 3 1 3 9
0 - - 1
21-3
01
¡2
3
0 4
— • -
¿1
5
1 1 1 1 1 1 1 1
- - • - , . . , 1
B|7
8
19
- 0 0 0 0 0 0 0 0
0 _ _
31-4
01
2 3
]¿
5|6
¡7
8 S
0
- - —
- - -
—- -
- .
_ -
0 0
- -
6 6
41-5
01
!2
3 ¿
5
0 0
— -
0 0
- - r.
4 4 _ -
6 7
8 ¡9
JO
5 5 -
- -
-.0 0 0 0 0 0 0 0 0
51-5
01
|2 !
3 '¿
¡5
|f)l
?lB
l9¡0
. • - -- . .
4 0 1 2 0 0 0 1 17 7 1 9 9 3 6 3 4
8 6 2 5 0 5 1 5 9
_
-0 0 0 0 0 0 0 0 0
. . • . . . , ( •
61-7
011
2
0 0 0 1 0 0 0 0 0
3 1 7 6 5 1 1 5 5
3 ¿
5
9 6 5 6 8 8 6 8 0 _
•
6|7
lS|9
lC
S S S S 5 5 S S S 5 S
/ / / / / / / / / / /
E E E E E E E E E E E
71-8
01
12
13
l¿
¡5
- 1 1 1 1 1
4 5 6 7 8 9 0 1 2 3 4
1 •
£¡7
15
'S :
C
9 -
- •
- 0
~Ti
: . .
0
i
' •¡ —
._. 1
! 1
t !
_j i
i !
i 1— ,
1 i 1—
t— 1 1 1-
co o
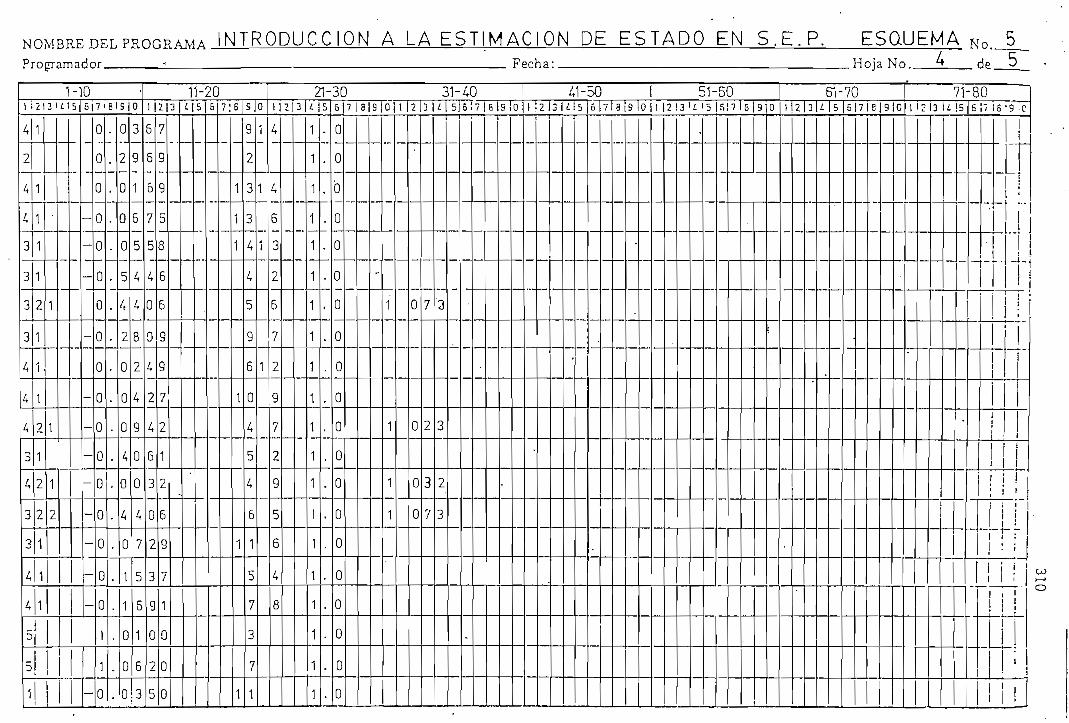
NOM
BRE
DE
L PR
OGRA
MA
INT
RO
DU
CC
IÓN
A
LA
ES
TIM
AC
IÓN
DE
ES
TA
DO
E
N
SPr
ogra
mad
or
: F
echa
:
E.P
. E
SQ
UE
MA
N
o_5
_H
oja
No
4
dp
5
1-10
I ¡2
t3U
t5
A 2 A / 3 3 3 3 A A A i o A 3 3 A A
1 1 1 1 1 2 1 1 1 2 1 2 2 1 1 1
5I 51 1
1 1 1 2
-
6J
7 'B
I9|0
- — - - _ - - - - _ — -
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 t 1 0
. . . . • . . . . - . . -0 2 0 0 0 5 A 2 0 0 0 4 0 A 0 1 1 0 0
3 9 1 5 5 A A 8 2 A 9 0 0 A 7 5 & 1 6
0¡3
11-2
0iu
n5 3 6 7 5 A 0 9 / 2 A 6 3 0 2 - 9 0 2 5
7 9 9 5 8 6 6 9 9 7 2 1 2 6 g 7 1 0 0 0
..
M5
-
6 - ~
?;B
:
1 1 1 1 1 1
9|0
9 2 3 3 A A 5 9 6 0 A 5 A 5 1 5 7 3 7 1
1 1 1 1 - -
21-3
01
2 3
¿¡5
A A 6 3 2 6 7 2 9 7 2 9 5 6 A 8
- -
1 1 1 1 1 1 1 1 1 1 1 1 1 I 1 1 1 1 1 1
- . . - - - • . . - • - , . .
6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
7
8|9
¡0
— -- 1 1 1 1
31-4
01
|2|3
¿
5
6Í7
Í8
S
0
-0 0 0 0
7 2 3 7
i
3 3 2 3
— -
,
i
41-5
01
¡21
3 ¿
5
- -
—
•-
51-5
0S
17
I8
9 (
0 ¡
1 |
2 !
3U
'5
|S
¡7
3¡9
jO
_-
- -
-
-
• - _
61-7
0i
1 2
3 ¿
| 5
-
71-8
0 ^
5|7
|6j9
iC|l
Iz
l3 ¡
¿ !
5 •
S ¡7
¡S
'9 -
C
-i 1
- --
• •-•.
¡ !i
1 i 1 ..!
i
-1t
i 1 í !
; í i
~T5
1
ii uco t—
'o

NOM
BRE
DEL P
ROGR
AMA
I NT
R O
D U
C C
I O N
A
LA
ES
TIM
AC
IÓN
DE
ES
TA
DO
EN
S.
E.P
. ES
QU
EMA
No.
_5,
_Pro
p-am
3dor
; :
: :
: s
Fec
ha:.
H
oja
No
2 de
5_
1-10
1 ¡2
13 U
!5
3 H 5
1 1 it
- i
&Í?
t8i9
¡0
- -
0 0 1- - •"
0 0 0
3 2 9 i
11-2
0
7 2 0
2|3 7 9 0
¿[5
6 .. - -
7¡B
i9|0 0 2 8
1 _
21-3
0IJ
2 3
¡¿|5
1 4 -
__
-
1 1 1
, , .
6|7
8
|9|0
0 0 0 _ -
I
„ -
31-4
01
|2
3 ¿
5|5
l7 |
Bl9
0
- _
-
-
- -
.
i
41-5
01
!2t3
Í¿!5
i
--~
.
-
6I7
Í3 ¡
9 10
-
-
51-5
01
|2!3
l¿
'5
|5
|7
8
9J
O
- ~ - —
_.
—
51-7
01
Í2Í3
ÍÍ Í
5 ¡
6I7
ÍB.
9ÍC
-
-
71-8
01
(21
3 U
15
• •
i
-
6 ¡7
S
'S
iC
- - -
•- -
— i i i
1
i
:
1 i
1 !
' •
!
i i
¡ t >
: ''
t
i
I
i
r

NO
MB
RE
DE
L P
RO
GR
AM
A
INT
RO
DU
CC
IÓN
A
Prop
r am
ador
LA
E
ST
IMA
CIÓ
N
DE
ES
TA
DO
E
N
S.E
rP.
Fec
ha:.
ES
QU
E-M
Att
n 6
1 T~
Hoj
a Nr
> '
de__
±_
1-10
1 Í2
I3U
I5
2 1 1
5 1 1
2 1 1
3 1 i
1
6(7
18
19
5 1 1
- - 1 1
0 1 11 10 0 1 1
11-2
0l|
2
0 1 11 1 V 13
£|5
1 1 1
D 2 1 1& 1 1fa T 1 - - 1 -¡V;B 0 1 - - 1 1
i S 0 i9 0
0 D -
21-3
01
¡2¡3
Í¿¡5
-
-
S
-
6¡7
8
J9
N -
,|
U (
31- ¿
01
2¡3
Ui
5 5
Í7
8Í9
0
s -
01 _.
0- - _
p .
ar
a
41-5
01.
2 1
3Ü
5
. r -
es
0 "
1 •
51-5
06
Í7Í8
19
!0
1 1
2'3
U ¡5 I
ñl?
8
V _
e -
r-
1 -
u) -
0s -
).9
10
61-7
0ll
2|3
i
5
-
•
5I7
IB
_
9ÍC
71-8
011
2 13
U '
5 |5
Í7
¡5 '
S ,C
-
'•
1 - —
i
- -
- 7
i \-
—
i i i
..
_ i ! i~
T" '
'. t
í j 1
1 \ 1 1 | 1 í
¡ i t ._ „. _1
OJ
K-* ro
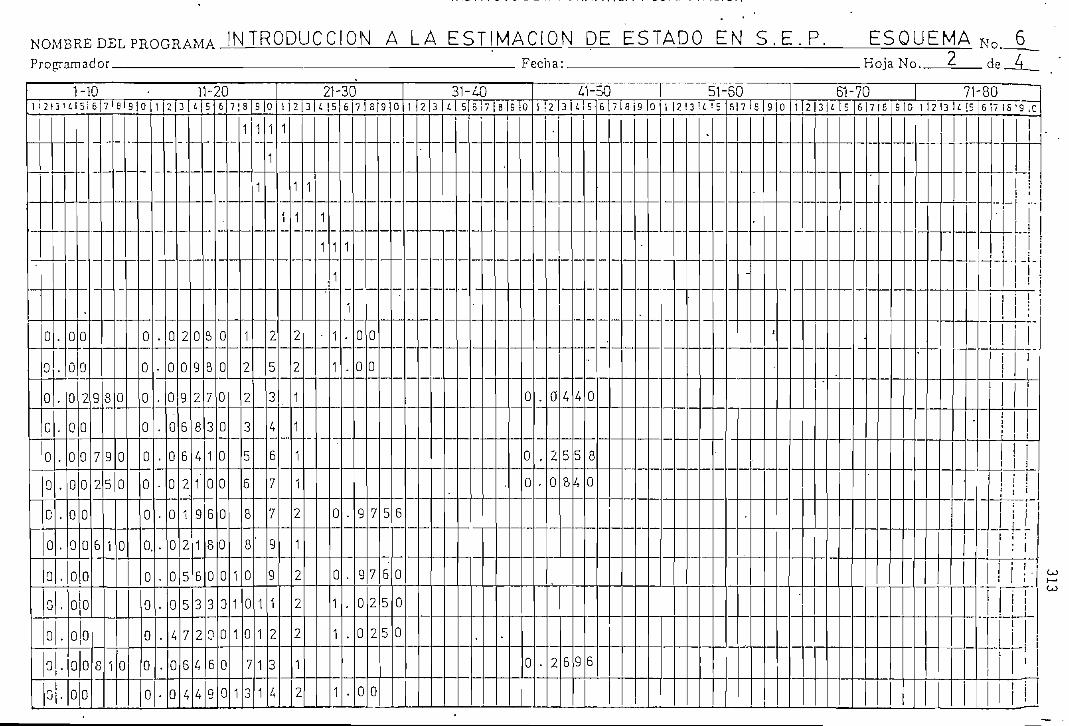
NO
MB
RE
DE
L PR
OG
RA
MA
. IN
TR
OD
UC
CIÓ
N
APr
ogr a
mad
or
„
LA
E
ST
IMA
CIÓ
N
DE
ES
TA
DO
E
N
S.E
.P.
ES
QU
EM
A N
o._
6..
Fec
ha:
H
oja
No
.__
¿_
_ d
e_A
_
1-10
1 ¡2
13
UI5
0 0 0 G 0 0 0 0 0 G 0 0
. , , , • . . , . . .
0.
0 0 0 0 0 0 0 0 0
- 0 0 2 0 0 0 0 0 0
ojo
0 0 0
0 0 0
3 ~ 9 7 2 6 S
7 If
ilS
lO
- 8 9 5 1 1- - 0 0 0 0 0
- 0 0 0 0 0 0 0 0 0 0 0 0 0
11-2
0l|
2
. , . . . . . . . •
Q 0 0 0 0 0 0 0 0 0 4 0 0
3 -• 2 0 9 6 6 2 1 2 c 5 7 6 4
4 0 9 2 8 4 í 9 1 6 3 2 4 4
5 - 8 8 7 3 1 0 6 8 0 3 o 6 9
6 - 0 0 0 0 0 0 0 0 0 3 0 o r
7¡8
- 1 1 1 1
1 1 2 2 3 5 6 8 8 0 0 0 7 -i o
9|0
1 1 1 1 1 1
1 1 2 5 3 4 6 7 7 9 9 1 2 3 4
21-3
02
3 ¿
¡5
1 1 --
1 1 2 2 1 1 1 1 2 1 2 2 2 1 2
1
1 11 1 1 1 0 0 1 1 1
6[7
|a[9
1 1 - . - . . -
0 0 9 9 0 0 0
0 0 7 7 2 2 0
5 6 5 5
0 •- 6 0 0 0
31-4
)}
2|3
¿
5
_ __-
1 ._
57
6
J9
rO
.
1 -
0 0 0 0
41-5
0]
2 3
U
5i
_ . , • •
0 2 0 2
4 5 a 6
4 5 4 9
- 0 8 0 6
6 7
8 ¡9
lO
--
._.
51-5
01
|2!3
U 1
5
- -
,
Si 7
8
-
•
9|0 i
51-7
011
23
£ 5
-
6I7
IE •-
9|C
71-8
0 l
1 2
13
!¿¡5
•
6 Í7
15
'9 ,
c
- - i' _'_ i ¡• ii
._! i
. I '. i .
-i- 1 1
: 1
! i
— t !
i i i_
jr i . i- J — í r

1 I
I V
/í—
I í
«--
Vi
NOM
BRE
DE
L PR
OG
RAM
A IN
TR
OD
UC
CIÓ
N
A
LA
ES
TIM
AC
IÓN
D
E
ES
TA
DO
E
N
S.E
Pro
fram
ador
:
Fec
ha:,
:
.p.
ES
QU
EM
A N
o.j5.
Hoj
a N
o.
3 dp
. 4_
1-10
1 ¡2
I3U
I5
r c 0 G C r C C r C ( ( ( i. . . . . .
í . .
) -
) .
] .
i T j •
1 - 3 3 -i •\* i
3¡1
|3
olp 00
06
00 oc oc oc 0 1 0 C oc 0
/
0 t
0 1 I
6 7
is'g
o
59
5 A
/ /
H
H
2 £
) ) 7 5
-
7 í
. 0
E
0 0 0 0 0
) 0
- -
0 0 0 0 0 0 0 0 0 8 0 0 0 ¡
11-2
0I2
|3
- • i < ' • . . , . - • 0
0 0 2 0 0 1 1 0 í 3 2 1 0
A / H 0 3 1 1 1 5 0 3 8 2 6 0
¿ 6 A 0 6 9 5 4 0 6 3 9 7 7 0
5 8 9 7 1 6 0 3 8 9 3 7 ? 2
6 0 0 0 0 0 0 0 0 0 0 0 0 0 _
7¡B 1 1 1 1 1 1 1 1 2 2 2 2 2
i3 5 5 5 S 9 9 9 2 1 2 3 3
9 1 1 1 1 1 2 2 2 2 2 2 2 2
0 5 5 7 3 9 1 0 2 1 6 3 A 5
21-3
0U 1 1 1 1 2 1 1 1 2 3 1 1 1
3¿
!5 1
1 1
6I7
8
|9
- • .
0 0
2 2
5 5
0 — 0 6 -
31-¿
01
Í2l3
¿
1 5
-_
——
57
89
0
.
0 0 0 0 0 0
¿1-
50i
2
3 Í ¿
5
• • - . * •
1 0 1 0 0 0
9 9 A 1 6 1
5 8 1 1 7 6
5 6 1 _ 0 0 0
6 7
8 9
lO
•
--
-
0 0
, •
51-5
01
|2!3 'i
¡5 |
S!7
l8|9
|0
- — 3 1
- 6 A
0 5
-
— 0 0
. -
61-7
01
2
1 0
7 5
3 ¿
5
- 0 2
•
61
7
E
•
P P C c p M P
- A A U U A I A
9fC
1
- 3 1 1 2 2
S2
71-8
0 j
1 1
21
3 !¿
Í5
SÍ7
¡5
'S ,
C
- 3 3 6 3 3 3
8 8 8 9 0 0 0
-
•- -
-
1 'í,._i -i :i
1 !,
i
— .í ¡ 4
- "i i i
~
i j

' t n
rin
I
l\sf-
\E D
EL
PROG
RAM
A I
NT
RO
DU
CC
IÓ
N A
LA
ES
TI
MA
CI
ÓN
DE
ES
TA
DO
E
N S
.E
.P
.
Pro
gram
ador
:
: -.
. F
echa
:
ES
QU
EM
A
No_
_5_
Hoj
a N
n 4
de_
A
1-10
1 ¡2
13
UI5
3 3 3 2
2 3 3 3 3 o O 3 3 2 2 3 2 2 3
1 i
. 1 1 1 -
- 0 - • • i •
6¡7
6
19
3 0 0 0 cL. 3 0 3- -
0
11-2
012
- 0 0 0 0 0
. - • • •3 0 0 0 0 0
MS
0 0 0 0 0
-
5 -- - _
7¡B --
9]0 1 0 - 0 0 0
. • - - .
21-3
01
2
A 3 1 7 6
0 0 - 5 5 0
3U
IS
0 0 - 0 0 0
'
61
71
8J
9
-
0 -- — —
31 -¿
01
2|3
U!
5l5
¡7l8
l9
0
—
i _ -
,
i
- - - - —
0 0 0 0 0
. • • -3 2 2 A 3
41-5
0i
2 l3
U 5
i
0 5 5 5 6
0 0 .' 0 0 0
- • • -
9 2 - 3 8 3
51-5
06
|7
3¡9
JO
|1 1
2 !3
U
'5
A 0 - 0 0 3
-0 2 0 0 0 2 0 0
- - — . . • •
2 8 A 0 1 - 1 2 A
0 0 3 7 1 0 3 0
0 0 0 7 2 0 5 0
5!7
B
|9IO
-
0 0 1 0 0 0 0 0 0
- -V - . . • -
61-7
011
2
0 0 2 1 0 0 9 1 2
9 6 5 5 7 6 0 0 2
3 ¿
5
0 0 0 0 7 0 0 0 0
6 1 7
! E
! 9 i
C
-
P S G S S a Q s s E S 5 S Q V P P A
A A U A A U U -r. S - R U 1 U u M
S L A 1 1 E E D D M R R 1 I C C 1 B
1 1 3 3 2 1 2 1 1 2 1 3 1 1 3 1
71-8
01
Í2 '
3 l
£ '5
|5 ¡
7 ¡£
'S ,
C
3 3 6 - • 3 3 3 3 3 3 3 A 3 3 3
8 S 9 & 8 0 8 0 8 8 0 8 & 6 8 8 S 8
,
- • 1
- 2_
••
-•— T
:-- — 1-
, i i
i i I
. ¡O
iOI
1
I
i 1i
~~Í
i"I
I
1I ,
1co t—*
en

316
ANEXO B
CONCEPTOS ESTADÍSTICOS
Las consideraciones estadísticas juegan un papel muy importante con
relación a las mediciones físicas, ya que cualquiera de esas medi-
ciones incluye un error, esto es una falta de exactitud provocada
por pequeñas perturbaciones aleatorias que no se pueden eliminar
por completo.. Por esta _razón es importante desarrollar una teoría
de errores de medición que conste de métodos para obtener buenas a_
proximaciones de las variables a estimar a partir de valores medi-
dos y de información acerca -de la exactitud de las aproximaciones.
B.l. TIPOS DE ERRORES DE MEDICIÓN
Decimos que cada medición incluye un error de medición o error de
observación. Este error se debe a la naturaleza de las mediciones
físicas, a la persona que efectúa la medición, a los instrumentos
que se usan y al sistema medido, ya que se ven afectados por peque_
ñas perturbaciones no predecibles. El error de medición se puede
reducir de tamaño con el uso de mejores métodos e instrumentos;, pero
no se pueden eliminar por completo.
B.l.l. Error constante o sistemático
Supóngase que utilizamos un instrumento, por ejemplo un voltímetro
que es calibrado inadecuadamente, entonces cada medición será afe£
tada en la misma forma, este error se denomina "ERROR CONSTANTE".
317
B.1.2. Errores estadísticos
Estos son errores provocados por perturbaciones que afectan a las me_
di clones y cuyo efecto no se puede predecir. Por tanto estos erro-
res no se pueden evitar o eliminar. Sin embargo su efecto si se pu£
de entender mediante una teoría de errores estadísticos desarrollada
por primera vez por GAUSS y LAPLACE.
Si consideramos que las variables aleatorias correspondientes a los
errores elementales (numero de perturbaciones muy pequeñas), son ij
dependientes, su suma que corresponde al error estadístico, es aproxj_
madamente normal. Este efecto es una consecuencia del Teorema del
Límite Central que observó 'Gauss por primera vez, y fue en esta si-
tuación en la que Gauss introdujo la distribución normal.
Ahora introduciremos números que caracterizan la exactitud de las me_
diciones.
Supóngase que efectuamos k mediciones, Xi» Xa,...., x, de la varia-
ble de interés en un período en que esta no ha cambiado, entonces -
podemos calcul'ar la media de la muestra.
1 kx = -=- ' z
A este valor se lo conoce como "VALOR MEDIO O ESPERADO". •
En términos probabilísticos se dice que si x es una variable aleato-
ria discreta con valores posibles Xi, Xz,....,x, y sea p(x-f) la prp_

318
habilidad de que x = x-j, para todo i = l,2,...,k entonces el "valor
esperado" o promedio de x vendrá dado por:
kE(x) = £ x- . p(x_0
i=l
Conociendo el valor medio podemos calcular la derivación standard -
así:
Esta cantidad se puede considerar como una estimación de la desvia_
ción standard de la población donde se ha tomado la muestra, y por
lo tanto, como una medida de la exactitud de las mediciones. En la
teoría de-errores de medición, a se llama también "error medio cua_
drático" o "error medio". .
Asi mismo, en estimación de máxima verosimilitud la desviación stan_
dard se define como:
y también se llama "ERROR MEDIO" (aun en el caso de una población
que no es normal). Más aun si la distribución del error estad.istj_
co se la conoce, podemos determinar intervalos de confianza para x"
y °x-

319
B.2. VARIANZA
Es un valor estadístico que Indica la dispersión de la información" x-¡
alrededor del valor medio y se define como:
• •-*- A<«' - *o lo que es lo mismo:
VAR(x) = E [x - E(x)] ; donde E(x) - x*
B.3. COVARIANZA.
SI se están observando dos variables que están relacionadas entre si:
yií Y 2 Í - - - - Í y i, Y xi, X2, ..... : x, , una medida estadística que des-
cribe como varía la una variable con relación a la otra es la "COVA-
RIANZA" y -está dada por: ' '
1 kCOV(x,y) = a = - Z x-¡:y- donde x,- = x,- - xA y 11 • „ -i l i
yi = Y - y
o escrita de otra manera:
COV(x,y) = E [(x - E(x))(y -'E(y))]
•mientras mayor sea la covarianza, mayor es la relación entre las va_
riables. Sin embargo, por ser un numero absoluto no se tiene idea
de cuan fuerte es la relación, <para superar este problema se están-

3ZO
danza la covarianza. La medida standardizada de la covarianza es
lo aue se denomina "CORRELACIÓN11 y se lo obtiene al dividir la cova_
rianza de x e y para sus respectivas desviaciones standard, entonces:
COV(x,y)r =
ax . ay .
B.4. TEORÍA DE LA CORRELACIÓN
Aprovecharemos ahora el concepto dado de CORRELACIÓN o grado de r_e_
lación entre variables, para conocer en que medida una ecuación de_s__
cribe o explica de una forma adecuada la relación entre variables .
Para esto es necesario definir algunas medidas de Correlación.
B.4.1. Variación explicada y no explicada
Dado que estos conceptos tienen mucho más relación con el filtro de
errores utilizado en la Aplicación de la Teoría de Estimación para
encontrar la. Curva Entrada-Salida de las Unidades térmicas^ parti_
remos de lo siguiente:
y = aT2 + bx + c + e
y yc = ax2 + bx + c
donde: ym = vector de valores medidos.
y = vector de valores calculados o estimados.
La variación total de y se define como Z(y - y")2 > es decir, la suma

321
de los cuadrados de las desviac iones de los valores de y de su me-
dia y. A p l i c a n d o conceptos de regresión no l inea l empleando la cur
va de mínimos cuadrados, la var iación total puede escribirse a s i :
£ (y - y)2 =x (y - y£ST)2 +s(yEST - y)2
donde el primer término del segurrdo miembro se denomina "VARIACIÓN
NO EXPLICADA", mientras que el segundo término se llama ' "VARIACIÓN
EXPLICADA", y esto es asi porque las desviaciones y , - 7 tienen
un patrón definido, mientras que las desviaciones y - y t se com-
portan de una forma aleatoria o- no previsible.
B.4.2. Coeficiente de correlación
La razón de la variación explicada a la variación total se llama:
"COEFICIENTE DE DETERMINACIÓN".' Si la variación explicada es cero,
es decir, la variación total es toda no explicada, es-ta razón es ce_
ro. Si la'variación no explicada es cero, es decir la variación to_
tal es toda explicada, la razón es 1. En los demás casos la-razón
se encuentra entre O y 1. Ya que el coeficiente de determinación
es siempre positivo, se denota por r2 y la cantidad r es lo que se
llama:' "COEFICIENTE DE CORRELACIÓN" y está dado por:
VARIACIÓN EXPLICADA = , E^yestVARIACIÓN TOTAL
Como se puede ver el.coeficiente de correlación varía entre -1 y 1.
Los signos ¿se utilizan para correlación no lineal positiva y nega_
tiva respectivamente. Nótese que r es una cantidad sin dimensiones

322
es decir, no depende de las unidades empleadas.
En conclusión puede decirse que; el valor de r calculado mide en cual_
quier caso el .grado de relación relativa al tipo de ecuación que
realmente se supone. Asi, si se supone una ecuación lineal y el va_
lor calculado para r es cercano a cero, significa que no hay casi cp_
rrelación lineal entre las variables sin embargo, ello no significa
que no haya correlación alguna entre las variables, ya que puede ha_
ber una alta correlación no lineal. AsT se deduce que el coeficien-
te de correlación mide la bondad de ajuste de la ecuación supuesta a
los datos.
323
ANEXO C
C.l. INSTRUMENTACIÓN
En el capitulo I se dijo que todo.s.los errores de medición, siguen
la curva de función densidad de probabilidad'normal .o Gaussiana, e£
to fue explicado previamente en el Anexo B.1.2. Pero dado que se es_
tá* tratando sobre un proceso físico, en-el cuál se incluye no sola_
mente el error en la medición sino también el error estadístico del
equipo utilizado, conviene mencionar la forma de tratar a una medj_
ción considerando el grado de precisión a la que pertenece el equj_
po dentro del análisis de Estimación.
Se empezará diciendo que una instrumentación adecuada es uno de los
requerimientos básicos de cualquier proceso físico.
Un sistema de instrumentación para ser adecuado, debe permitir rec£_
ger la mejor información tanto de la cantidad como de la calidad, de
tal forma que al supervisar un sistema exista la suficiente confia_
bilidad de que los datos obtenidos son los correctos. Ya que seria
paradójico que supervisar un sistema sea menos confiable que el
proceso mismo.
En modernos sistemas de instrumentación, hay cualquier cantidad de
aparatos que recogen la información desde un lugar lejanoyla trans_
miten a un centro de control. Estos aparatos incluyen: transforma-

324
dores, sensores, asi como convertidores analógicos y digitales. Cua]__
quiera de estos aparatos puede fallar ya que ninguno de ellos es pe^
fecto, es decir, existe una cierta cantidad de error asociada en su
funcionamiento.
La cantidad de error es en general desconocida, sin embargo de expe
rimentos realizados en laboratorios para control de calidad , "los
constructores de estos equipos pueden dar información referente al
comportamiento estadístico y la especificación de la categoría de
cisión a la que pertenece.
Estos experimentos consisten en tomar una muestra de la población en_
tera de los aparatos en cuestión, y con una señal patrón conectada a
cada equipo, observar la medición de cada uno. En el proceso de. re_
perir el experimento los resultados varían de prueba en prueba en fojr
ma aleatoria, entonces, la cantidad de interés en la prueba se dice
que es una variable aleatoria.
La curva obtenida que muestra la cantidad de mediciones realizadas
versus el número de aparatos asociados en el experimento se muestra
a continuación.
0.6
0.4 •
0 . 2 - ,
Fraccío'n de aparatoscon t a misma medición
numero demedic iones... -1 1 fi 2 3 4 5. ..
Fig. C-l Prueba de precisión sobre una muestra de aparatos.

325
Esta curva es llamada Gaussiana. El valor u es la media o valor e_s_
perado de las diferentes mediciones y da un índice de la tendencia
de la mayoría de mediciones de estar cerca a un cierto valor prome_
dio. Una medida de la dispersión de las diferentes mediciones está
dada por la varianza la misma que se denota por a2. La raíz cuadra^
da de la varianza es la desviación standard a y su significado r
dica en que: En una función densidad de probabilidad normal5 se de_
ben satisfacerlas siguientes condiciones:
68% de las mediciones caen dentro de u +_ a
95% de las mediciones caen dentro de u j 2a
99% de las mediciones caen dentro de u +_ 3a
Como se puede vertía desviación standard da una valiosa info_r
mación sobre la precisión de ios diferentes aparatos en un sistema
de instrumentación. Esto permite no solo estimar la cantidad de
error asociada a cada medición individual, sino que sirve para di_s_
criminar mediciones incorrectas de un conjunto de mediciones acepta_
bles.
También permite mezclar mediciones obtenidas'de aparatos con dj_
ferente precisión, así mismo como sirve para dar mayor peso a
la información recogida de equipos con un alto grado de precisión
En la mayoría de equipos el grado de precisión viene dada en porcen-
taje, en este caso su desviación standard se obtiene al dividir el
valor dado para 3, considerando que se desea un 99% de Confiabili -
dad.

326
C.2. DEMOSTRACIÓN ANALÍTICA DE LOS RESULTADOS DE LAS DERIVADAS PA_R
CÍALES UTILIZADAS EN LA MINIMIZACION DE LA FUNCIÓN DE ERROR PA
RA EL CASO LINEAL DE ESTIMACIÓN
En el capitulo II al realizar la modelación para el caso lineal se
mostró que el mínimo de la función de error J(X) se obtiene cuando:
9(X)
Ahora se pasará a demostrar los resultados adoptados al calcular las
derivadas de.los términos que intervienen en el valor de la función
de error J(X).
Sabemos que: J(Y)=Yt.W.Y - .2Xt.At.*W.Y + Xt.At.W.A.I) entonces;' cal cu.
lar'la derivada de J(X) en función'de los elementos del vector de
•variables de estado, equivale a calcular el gradiente de dicha fun-
ción, por lo que: . •
3(X)
Al calcular el gradiente del primer término, a simple vista nos da-
mos cuenta de que este valor es igual a O ya que éste es independie^
te del vector de variables de estado.
Entonces: Vx(Yt.W.Y) = O (C.2.1)
Si consideramos que el segundo término es un valor escalar y lo agru_
327
pamos de la siguiente manera:
M = - 2 A^W.Y = VECTOR
tendremos que:
(X .M) = [xi,X2S;...Jx2n-1] M
M
2n-l
1=1x1.M1 = ESCALAR
Por lo tanto:
Vv =A
= M = - 2~.At.W.X (C.2.2)
y por ultimo si tomamos el tercer término de J(X) podremos realizar
el siguiente análisis:
Considerando a la matriz M como:
M = I^.W.h = MATRIZ CUADRADA Y SIMÉTRICA
podremos escribir:
Xt.At.W.A.X
resolviendo en forma matrlclal tendremos
X2X2n-l] mi 2 1,211-1
; '2n-l,2n-l
328
Xi
X2
X2n-l
2n-l 2n-l
i=l j=l
que es un valor escalar cuadrático, asi si calculamos el gradiente
llegaremos a lo siguiente: ' •
V Y ( X t . M . X ) = 2.M..XA
reemplazando el valor de M por el valor real, concluiremos que:
= 2 . A t . W . A . X ( C . 2 . 3 )
que es lo que hemos deseado demostrar.
C.3. DESARROLLO ANALÍTICO DEL MODELO NO LINEAL DE ESTIMACIÓN DE ESTA
DO
En el capitulo II se realizó el análisis para funciones lineales, en
donde el objetivo en el proceso de Estimación de Estado ha sido minj_
mizar la función de error J(X), pero, si como se mencionó no dispone
mos de una relación lineal entre el estado (X) y las funciones co-
rrespondientes a las mediciones realizadas, entonces tenemos que re_
currir a una técnica iterativa para minimizar J(X). Una técnica co

3Z9
mün usada para la estimación de estado en sistemas eléctricos de po_
tencia es, calcular el gradiente de J(X), (v(J(X"))) y f-orzar a esta
nueva función a hacerla O usando el método de Newton-Raphson como
fue hecho en los cálculos convencionales de Flujos de Potencia.
Antes de proceder a minimizar J(X), revisaremos como usar el método
de Newton en problemas multidimensionales.
Dadas las funciones no lineales: f-j(X), i = 132, ....; podemos
trar el vector de estado Xp lo que nos da: f.¡(Xp) = f-j deseado.
Si arreglamos a las funciones f.¡ en un vector, podremos escribir:
Perturbando al .vector X e n A X , tendremos:
leseado - TW - T' W • AX = O
El término f (X) es el Jacobiano en el Cálculo de Flujos; asi
pero sabemos que en el punto de solución f , , = 03 luego
AX = (f'OOTM-fíx)) (c.s.i)
para obtener fipspaci0 debemo's calcular el valor deAX:, luego obtener

330
el nuevo estado: X = X¡+ AX¡y reaplicar la ecuación de AX hasnuevo J - J r —
ta que: o AX,-sea muy pequeño o f(X) sea muy cercano a
Retornando al problema de Estimación de Estado, sabemos que el
tivo principal es minimizar la función de error:
min J(X) = I(y, - f,(X))
Si calculamos el gradiente.de J(X) nos queda:
3(J (X) )
3(X i )
3 ( J ( X ) )
3 ( X O
3(J (X ) )
3(Xm)
- 2.
3 f i (X) 3 fk(X)
3 (X i ) 3 ( X j )
3 f i (X)
3 (X 2 )
3fi(X) .
3(Xm)
•
1
aSYi-fi(X)
Y2-f2(X)
donde:
k
m
Gradiente de ..., evaluado en las X . variables de estado .
funciones correspondientes a las k mediciones realizadas
del sistema (f al caso de flujos- de potencia).
factor de peso donde o, es la desviación standard del equj_
po utilizado en la'iésima medición.
medición iésima.
número de mediciones realizadas del sistema.
(2.n-l) variables de estado; n = número de .barras del si^_
tema.
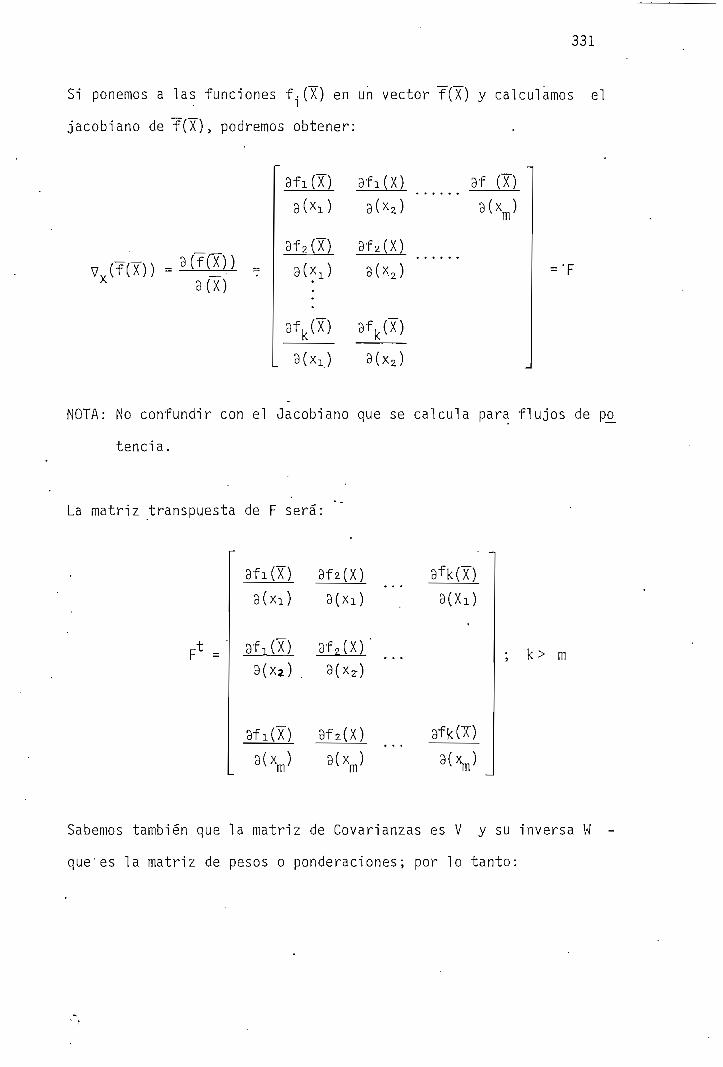
331
Si ponemos a las funciones f-(X) en un vector f(X) y calculamos el
jacobiano de f(X), podremos obtener:
8fi(X) 3fi(X) 9f (X)^(•x \ \ v >o^ AlJ ó\2 J olAm/
3fz(I) 3fz(X)
r ^ / ' Y ^ ^ /" Y \Fo^l^ 0\^z) r
3fk(X) 3fk(X)
3(x2)
3(X)
NOTA: No confundir con el Jacobiano que se calcula para flujos de po_
tencia.
La matriz transpuesta de F será:
3fi(X)
3(xi) 3(xi)
3fz(X)3(xz)
3(xm)
3fk(X)
3(Xi)
; k> m
Sabemos también que la matriz de Covarianzas es V y su inversa W
que'es la matriz de pesos o ponderaciones; por lo tanto:

w =
332
• 9,
Así el gradiente de la función de error, vx(J(X)), se puede escri-
bir de la siguiente manera:
VX(J(X)) = - 2 . F . W . AY (C.3.2)
donde Y - f(X) = AY .
Haciendo analogía del método de Newton entre lo descrito para el
casó de flujos, y lo que deseamos para el caso de Estimación, que
es minimizar J(X) haciendo vy(J(X)) = Oa entonces como en la
ción (C.3.1) pondremos lo siguiente:'
-1
AX =' - VX(J(X)) (C.3.3)
El Jacobiano de vx(0(X))j es calculado tratando a la matriz F como
una constante, así:
3(V X ( 0 ( X ) )
a (X)
) - 9 y
3 ( X )2 F1
i-
Yi - f i (X)
y 2 - f2(D-
yk ~ fk^ J

333
= - 2 . Ft . W . (-F)
= 2 . Fu , W . F
por lo que la ecuación (C.3.3) queda de la siguiente manera
A-X = 1.2.Ft.W.AY
AX = (Ft.W.F) 1.Ft.W.AY (C.3.4)
que es la ecuación principal para la estimación de los incrementos
de las variables de estado.
C.3,1. Proceso funcional
Si asumimos valores iniciales de las variables de estado, es decir,
.X|/ \s calcular también el valor de AX / * con la ecuación
(C.3.4)3 una vez que este vector de incrementos ha sido encontrado
podemos calcular los valores corregidos de las variables de estado,
entonces:
X , = X , v + AX , x1 (o) (o)
este proceso se repite
AX (k) = (F1 (k) (k) (k)

334
= X (k) + AX (k)
hasta que:
(k+D" X < e ; e = Valor especificado
por lo que: X
tencia. .(k+D es por lo tanto el estado del sistema de po_
Con relación a la detección e identificación de error en las me-
diciones el proceso es el mismo que el caso lineal, e.s decir, una
vez que el algoritmo de estimación de estado converge, se debe
realizar la prueba de hipótesis para detectar y deshechar los va._
lores erróneos (en caso existan) y proceder a una nueva estima -
ción hasta que el algoritmo pase la prueba. En este momento se
habrá encontrado "la mejor estimación" de las variables de estado,
y estaremos en condiciones de calcular todos los valores necesa-
rios para realizar la mejor supervisión del Sistema.
C.4. DEMOSTRACIÓN ANALÍTICA DE LA COVARIANZA DE LOS VALORES CALCU_
LADOS CORRESPONDIENTES A LAS CANTIDADES MEDIDAS (Ye)
En la presente demostración se utilizarán las definiciones y valo_
res obtenidos en el capítulo II, secciones: 2.2.2.1. y 2.2.2.2. ,
así:
Cov(Yc) = E[(Yc - E(Yc)) . (Ye - E(Yc)r] (C.4.1)

335
Ye = A . Xc . (C.4.2)
E(Yc) - A . Xt (C.4.3)
Xc = (A1 . W . A)'1 . A* . W . Ym (C.4.4)
Ym = A . Xt + e (C.4.5)
y E(e - et) = a2 . V = a* . W"1 (C.4.6)
Si reemplazamos las ecuaciones (C.4.2) y (C.4.3) en (C.4.1) ten-
dremos :
Cov(Yc) - E [(A.Xc - A.XtKA.Xc -
pero si: A.Xc = A.(At.W.A)~1.At.W.(A.Xt + e)
A.Xt + Mi
donde: M = A(At.W.A)~1.At.W y A.Xc - A.Xt - ME
entonces la Covarianza de Ye será igual a:
Cov(Yc) = E [(MÍ) . (Mi)1] = M.E [e .e*]. Mt (C.4.7)
reemplazando la ecuación (C.4.6) en (C.4.7) tendremos :
Cov(Yc) = M'.a2.W"1.Mt

336
y por último si reemplazamos el valor de M:
Cov(Yc) = A.(At.W.A)~1.At.W.a2.W"1.Wt.A.(At.W.A)~lt.At
De consideraciones anteriores sabemos que:
= W y (A^W.A)-1* = (At.W.A)~1
por lo tanto
Cov(Yc) = ff2.A.(At.W.A)"1.At.W.W"1.W.A.(At.W.A)"1'.At
Así la covarianza de Ye será igual a;
Cov(Yc) = o2 . A . (At . W . A)"1 . At
C.5. PROCEDIMIENTO DE PRUEBA PARA OBTENER EL CONJUNTO DE MEDICI£
NES NECESARIAS PARA ESTIMAR LAS CONSTANTES DE LA CURVA EN-
TRADA - SALIDA Y FILTRO DE ERRORES DE MEDICIÓN EN EL ANAL^_
SIS DE IDENTIFICACIÓN Y DETECCIÓN
Se ha dicho que para obtener la curva Entrada - Salida, es nece-
sario tomar tantas mediciones de Consumo de Combustible y Poten_
cia de generación como sean necesarias, para obtener la mejor
estimación de las constantes de dicha curva. Sin embargo, el pro
337
cedimiento no es tan simple ya que se necesita cumplir con los reque_
rimientos básicos dentro del funcionamiento mecánico de'una turbina
para poder realizar tales pruebas. A continuación se mencionarán áj_
gunos puntos importantes que hay que observar dentro del procedimien_
to.
C.5.1. Procedimiento de prueba
a) Para proceder a realizar las pruebas, la máquina debe haber esta_
do en funcionamiento por lo menos 2 horas a fin de obtener condi_
ciones de operación estables (Condiciones térmicas).
b) Es necesario que para cada punto de carga se tomen por lo menos
cuatro mediciones con intervalos de cinco minutos para luego pro-
ceder a realizar el promedio de éstas.
c) Luego de cada incremento de. carga, será necesario un tiempo de op_e_
ración de 30 minutos para obtener condiciones de operación esta-
bles.
d) Para cada prueba será necesario contar con el equipo adecuado, es
decir:
- Un flujómetro para medir el consumo de combustible, éste debe
ser de buena calidad.
- Para obtener datos comparativos de la potencia generada será ne_
cesario contar con un analizador industrial, un medidor de
338
potencia activa adicional y un medidor de KWH como redundan-
cia y en caso de que se desee mayor conflabilidad será nece_
sario disponer 'de:
- Un medidor de la presión barométrica.
- Un termómetro para medir la temperatura ambiente.
- Un termómetro para medir"la temperatura del combustible, y
algunos otros accesorios para considerar todos los efectos
ambientales al momento de la prueba.
C.5.2. Análisis del filtro de-errores de medición en el proceso
de estimación de las constantes de la curva entrada - sa
lida
Una vez obtenidas las mediciones de potencia de generación y con_
sumo de combustible, se pasa a realizar la estimación delascóns_
tantes de la curva Entrada - Salida utilizando para el efecto la
expresión:
X = ((^ . W . A)'1 . At . W . C
Con los mejores estimados se calculan los valores de consumo de
combustible para las potencias dadas en la prueba, los mismos que
son a su vez los valores medios de la variable de interés.
Utilizando la Teoría de Correlación dada en el Anexo B se procede
a calcular el coeficiente de determinación en base a la expresión:
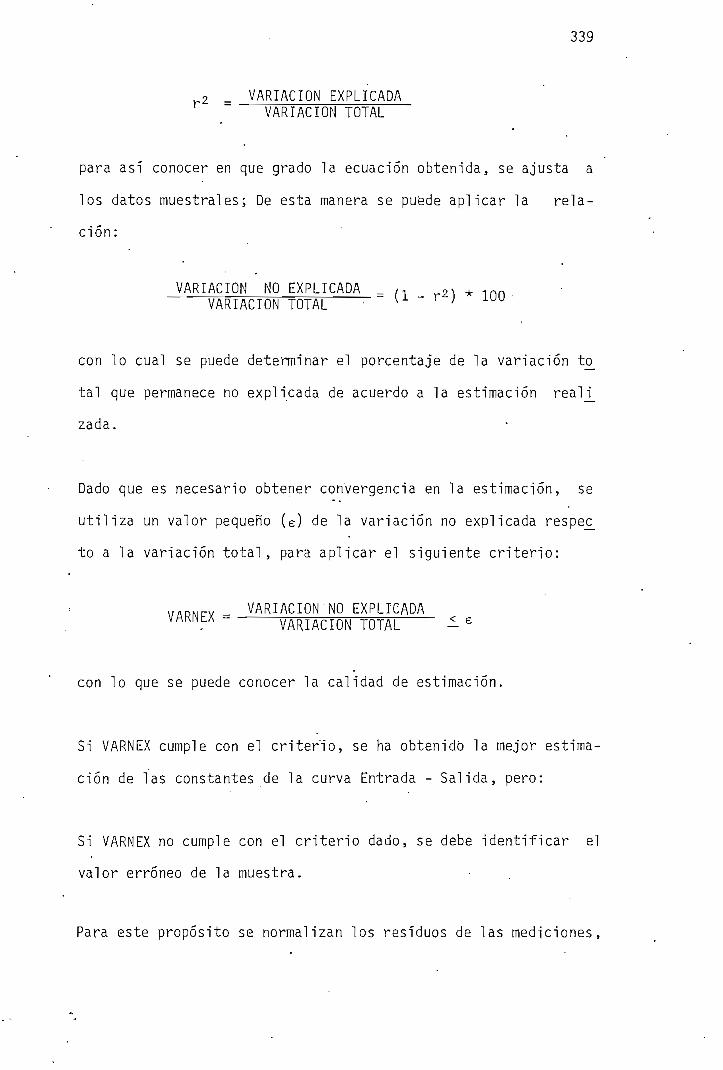
339
2 = VARIACIÓN EXPLICADAVARIACIÓN TOTAL
para asi conocer en que grado la ecuación obtenida, se ajusta a
los datos muéstrales; De esta manera se pu'ede aplicar la rela-
ción:
VARIACIÓN NO EXPLICADA _r = (1 - r2) * 100VARIACIÓN TOTAL
con lo cual se puede determinar el porcentaje de la variación tp_
tal que permanece no explicada de acuerdo a la estimación realj_
zada.
Dado que es necesario obtener convergencia en la estimación, se
utiliza un valor pequeño (e) de la variación no explicada respec_
to a la variación total, para aplicar el siguiente criterio:
= VARIACION'NQ EXPLICADAVARIACIÓN TOTAL -
con lo que se puede conocer la calidad de estimación.
Si VARNEX cumple con el criterio, se ha obtenido la mejor estima-
ción de las constantes de la curva Entrada - Salida, pero:
Si VARNEX no cumple con el criterio dado, se debe identificar el
valor erróneo de la muestra.
Para este propósito se normalizan los residuos de las mediciones,
340
utilizando los criterios de covarianza anteriormente mencionados
y se busca el mayor residuo normalizado.-
Una vez identificado este valor, se elimina la medición corres -
pendiente al mayor residuo normalizado y se vuelve nuevamente con
el proceso de estimación de las constantes de la curva Entrada -
Salida. Este proceso continúa hasta^ que se cumpla con el crite_
rio de convergencia.

341
ANEXO D
EJEMPLO DEMOSTRATIVO DE LA TEORÍA DE ESTIMACIÓN DE ESTADO EN. UN_
SISTEMA- DE, 3_ BARRAS
Para demostrar el funcionamiento de la Teoría de Estimación de Es_
tado en la Operación de un sistema eléctrico de potencia en'tiem_
po real, se analizara á continuación el Ejemplo 7.7. del. Texto :
"ELECTRICAL ENERGY SYSTEMS THEORY", OLLE I. ELGERD, pp - 256.
ose.
D3
Las lineas son de igual característica y de acuerdo al circuito
equivalente TT los datos de impedancia y susceptancia son:
Zserie = 0.021 -f jQ.0872 p.u.
Yshunt = JO.0226 p.u.
Las especificaciones de Voltaje y Potencia de barra son
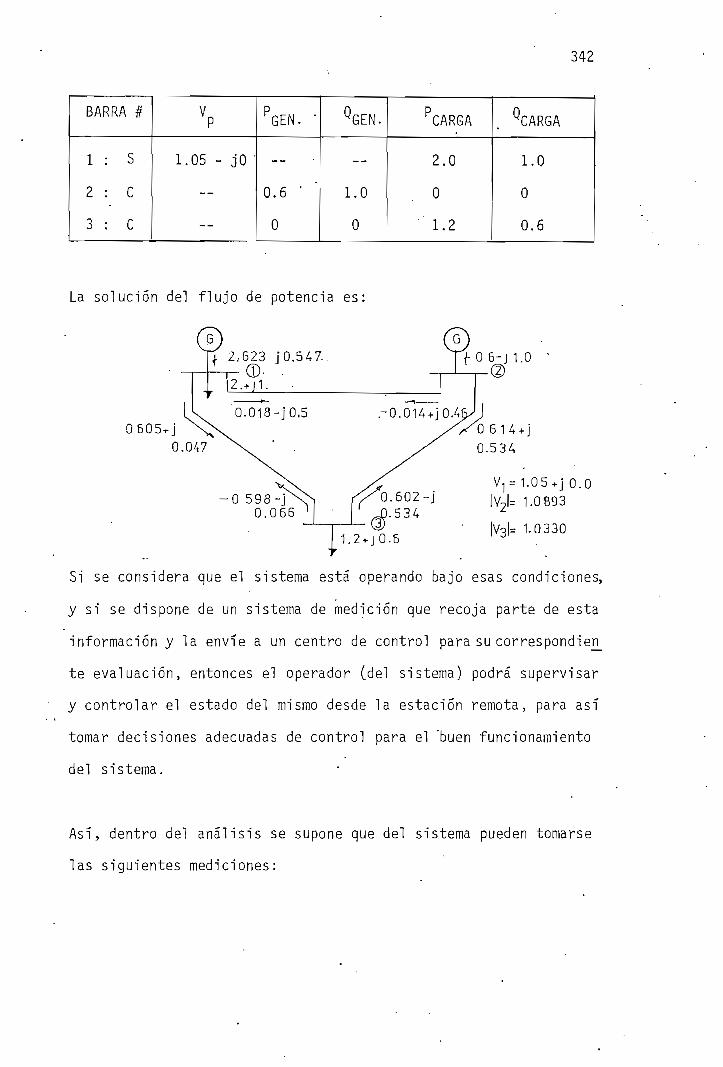
342
BARRA #
1 : S
2 : C
3 : C
VP
1.05 - JO '
--
—
PGEN. '
--
0.6 '
0
QGEN.
--
1.0
0
PCARGA
2.0
o'" 1.2
QCARGA
1.0
0
0.6
La solución del flujo de potencia es:
0605.J0.047
-O 598-j0.066
i 1<0893
|Vol= 1-0330' J
Si se considera que el sistema está operando bajo esas condiciones,
y si se dispone de un sistema de medición que recoja parte de esta
información y la envié a un centro de control para su correspondiera
te evaluación, entonces el operador (.del sistema) podrá supervisar
y controlar el estado del mismo desde la estación remota, para asi
tomar decisiones adecuadas de control para el 'buen funcionamiento
del sistema.
Asi, dentro del análisis se supone que del sistema pueden tomarse
las siguientes mediciones:

343
V*
Si las mediciones han sido extra-idas de equipos de igual caracte-
rística se tiene que los datos que llegan al centro.de control -
son:
MEDIC. #
1
2
3
4
5
6
7
8
9
10
TIPO
Pl-2
^2-3
V
Pl-3
V3 '
P2-l
P2-3
Pl
P3-l
P3-2
VALOR (p.u)
0.0182
0.5342
1.0014
0.6050 *
1.0330
-0.0139
0.6145
0.6232
-0.5979
-0.6022
a
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
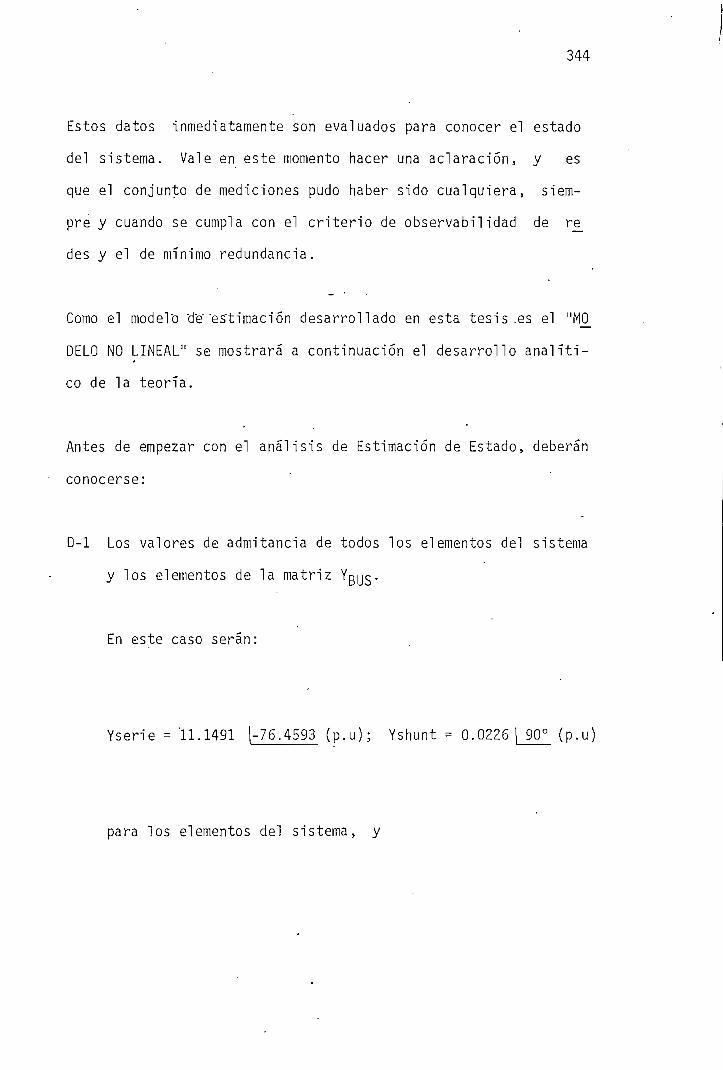
344
Estos datos inmediatamente son evaluados para conocer el estado
del sistema. Vale en este momento hacer una aclaración, y es
que el conjunto de mediciones pudo haber sido cualquiera, siem-
pre y cuando se cumpla con el criterio de observabil idad de re^
des y el de mínimo redundancia.
Como el model'o de' estimación desarrollado en esta tesis.es el "M0_
DÉLO NO LINEAL" se mostrará a continuación el desarrollo analíti-
co de la teoría.
Antes de empezar con el análisis de Estimación de Estado, deberán
conocerse:
D-l Los valores de admitancia de todos los elementos del sistema
y los elementos de la matriz
En este caso serán:
Yserie = '11.1491 1-76.4593 (p.u); Yshunt = 0.0226 \° (p.u)
para los elementos del sistema, y

345
BUS
22.2543 1-76.4324° 11.1491 1103.5407° 11.1491 |103.5407°
11.1491 |103.5407° 22.2543 |-76.4324° 11.1491 [103.5407'
11.1491 |103.5407° 11.1491 103.5407° 22.2543 [-76.4324°
Q-2 El valor de voltaje de la barra oscilante, pudiendo ser este:
- El que ha sido considerado en el cálculo de flujos o valor
teórico, y
- En forma práctica, midiendo varias veces el voltaje en la
barra para obtener el promedio.
Para el ejemplo se tiene que:
E — i nc I noT = l.Ub U
D-3 Los valores iniciales de voltaje que deben ser asumidos para
todas las barras, excepto para la osci lante .
Ast:
= LO £3° = 1.0
Conocido esto, se aplica la expresión (no lineal) de Estima-
ción de Estado:.
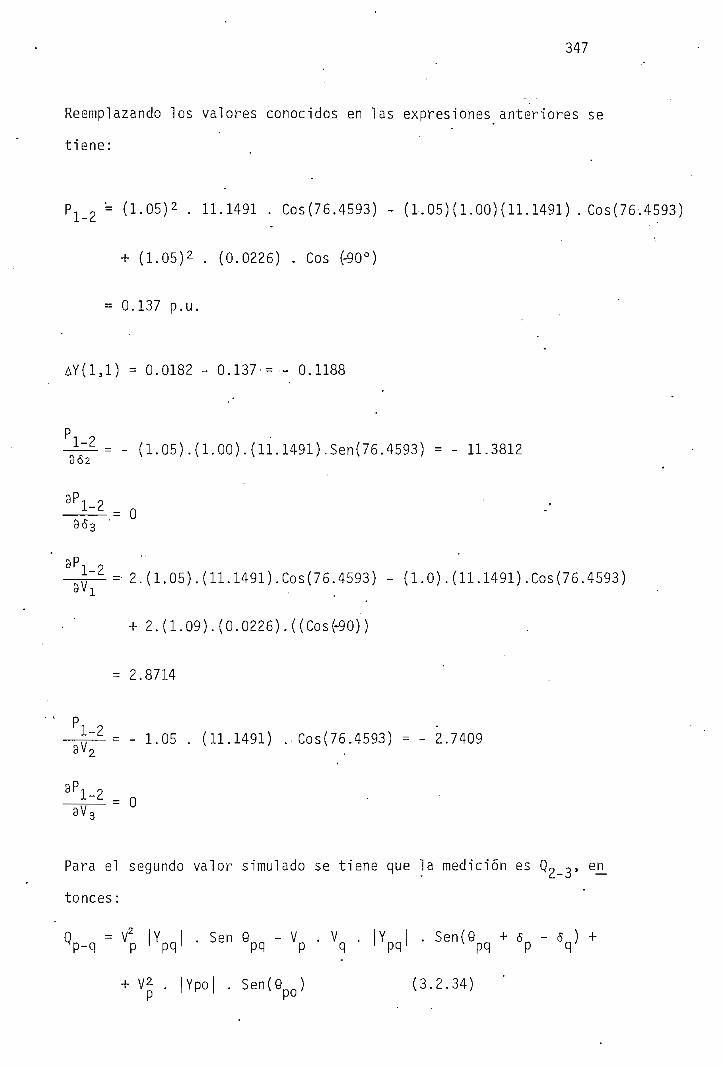
347
Reemplazando los valores conocidos en las expresiones anteriores se
tiene:
P1_2 = (1.05)2 . 11.1491 . Cos(76.4593) - (1,05) (1.00) (11.1491) . Cos(76-.4593)
+ (1.05)2 . (0.0226) , Cos (-90°)
= 0.137 p.u.
¿Y(191) = 0.0182 - 0.137-=- 0.1188
rl-2362
= - (1.05).(1.00).(11.1491).Sen(76.4593) = - 11.3812
1-2
1-23V-
1-2
1-23V,
= O
=• 2.(1.05).(11.149l).Cos(76.4593) - (1.0).(11.1491).Cos(76.4593)
2.(l.09).(Q.0226).((Cos(~90))
= 2.8714
= - 1.05 , (11.1491) .. Cos(76.4593) = - 2.7409
= O
Para el segundo valor simulado se tiene que la medición es Qo_o> en_
tonces:
Q = V2 Y . Sen O - V . V . Y . Sen(9 + 5 - 6 ) +Vq P pq pq p q pq pq P q
^ . |Ypo| . Sen(9po) (3.2.34)
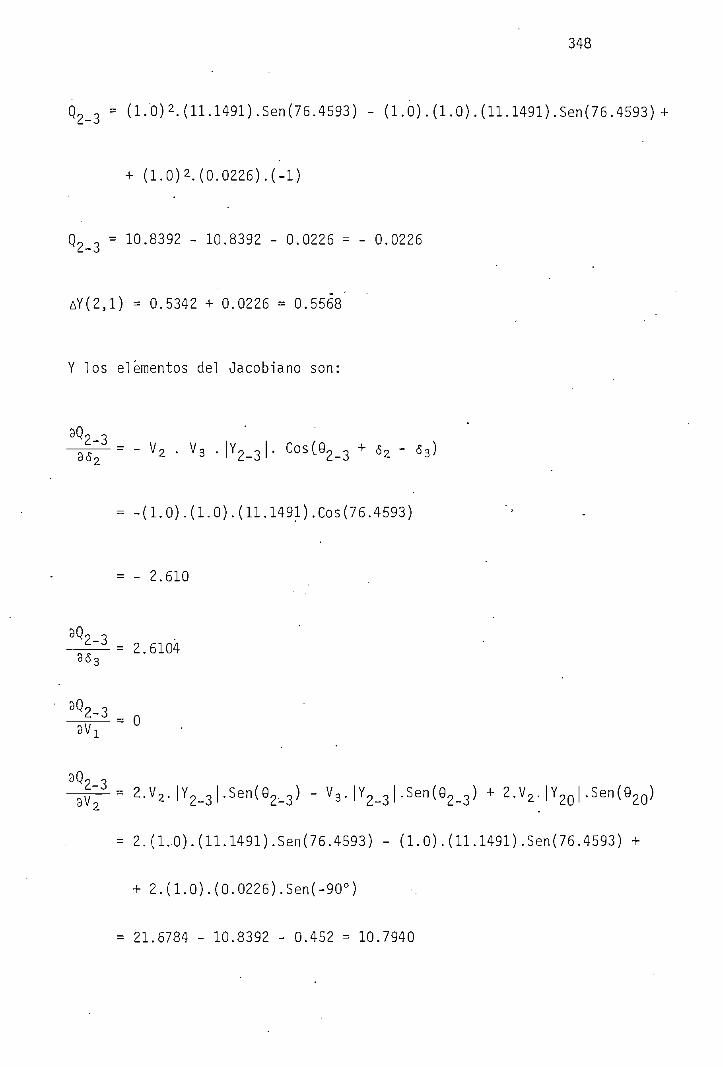
348
Q2_3 = (l.O)MH.1491).Sen(76,4593) - (1.0). (1.0). (11.1491) .Sen(76.4593)
(1.0)M0.0226).(-1)
Q2_3 = 10.8392 - 10.8392 - 0.0226 = - 0.0226
A Y ( 2 , 1 ) ' = 0.5342 + 0.0226 = 0.5568
Y los elementos del Jacobiano son:
'2-336'
2 . 3
= -Cl .O) . (1 .0 ) . (11 .1491) .Cos(76 .4593)
= - 2.610
JW2-33óq = 2,6104
<2-39 V -
= O
'2-33 V - = 2 . V 2 . | Y 2 _ 3 .Sen(0 2 _ 3 ) - .Sen(9 2 _ 3 ) + 2 . V 2 . | Y 2 Q .Sen(92 0)
- 2.(1. .0) . (11.1491).Sen(76.4593) - (1 .0) . (11.1491) .Sen(76.4593)
2 . ( 1 . 0 ) . ( 0 . 0 2 2 6 ) . S e n ( - 9 0 ° )
= 21.6784 - 10.8392 - 0.452 = 10.7940

349
<2-3 _3 V :
.Sen(92_3) = -(1.0) . (11.1491) .Sen(76 . 4593)
= - 10.8392
La tercera medición corresponde a Potencia reactiva en la barra 2,
entonces el valor calculado de Q2 es:
Qn = 2 V n , V . Y. .Sen(0 )P = P q &-q p-q;
(3 .2 .26)
= (1.0).(1.05).Sen(-103."5407).(11.1491)
+ (1.0)2 .Sen(76.4324).(22.2543) + (1.0)*.(11.1491).Sen(-103.5407)
Qo = - 11.3812 + 21.6333 - 10.8392'= - 0.5871
AY(3S1) = 1.0014 + 0.5871 = 1.5885
y los términos del Jacobiano
3Q2 _2-l -
V2.V3. Y2_3 .Cos (02_3)
= (1.0).(1.05).(11.1491).Cos(-103.5407) + (1.02)2.(11.1491 ).Cos(-103.5407)
=(- 2.61). (2.05) = - 5.3513

350
= - V2.V3. Y2_3 .Cos(Q2_3) =
= - (11.1491).Cos(-103.5407) = 2.61
.Sen(Q2_1) = (1.0).(11.1491).Sen(-103.5407)
= - 10.8392
- 2.V2|Y22 -Sen(Q2.2) + Vq. Y2_q .Sen(02_q)
= 2.(1.0).(22.2543).Sen(76.4324)
+ 1.5 . 11.1491 .Sen(-103.5407) + (1.0). 11.1491 .Sen(-103-. 5407)
= 43.2665 - 11.3812 - 10.8392 = 21.0461
= _ 1Q-.8392
Para las restantes mediciones se sigue con el mismo procedimiento,
asi el Jacobiano será:

351
F =
™-11:381
- 2.610
- 5.351
0
0
11.381
10.8392
-11.381
0
-10.8392
0
2.61 .
2.61
-11.381
0
• • 0
-10.8392
-11.381
11.381 •
10.8392
2:871
0
-10:8392
2.871
0
- 2.610
0
5.743
- 2.61
0
- 2.741
10.794
21.046
0
0
2.480
2.61
- 2.741
0
'- 2.61
0
-10.8392
-10.8392
' - 2.741
2.00
0
- 2.61
- 2.741
2.48
2.61
el vector Independ ien te :
AY = P0.119 0.557 1.589 0.468 0.067 0.117 0.614 0.349 -0.467 -0.602]"
y el vector de pesos:
w = [i.o 1,0 i.o .1.0 i.o i .o i.o i.o i .o i .ol*
Si se realiza el producto F .W se tiene; -
-11.381 - 2.610 - 5.351 O O 11.381 10.839 -11.381 O -10,839
O 2.610 2.610 -11.381 O O -10.839 -11.381 11.381 10.839
2.871 O -10.839 2.871 O - 2.610 O 5.743 -2.610 O
- 2.741 10.794 21.046 O O 2.480" 2.610 - 2.741 O . - 2.610
O -10.839 -10.839 - 2.741 2.00 O - 2.610 - 2.741 2.480 2.61
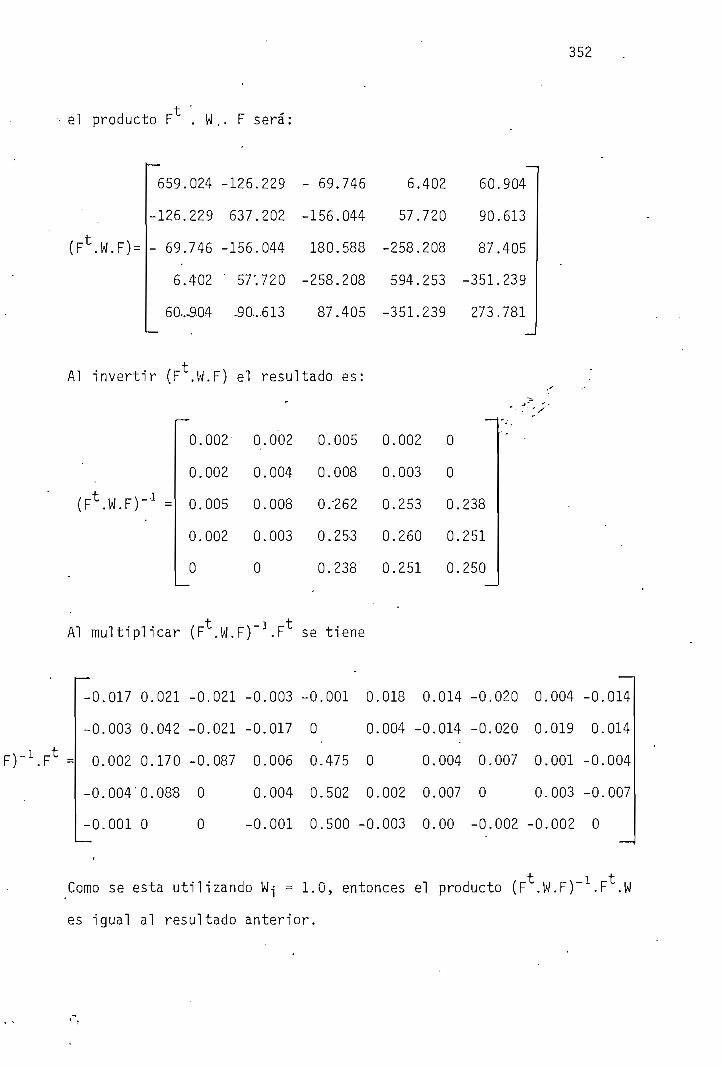
352
el producto F . W.. F será:
(Ft.W.F)=
659.024 -126.229
-126.229 637.202
- 69.746 -156.044
6.402 ' 57'.720
60,-9-04 -90-..613
69
156
180
258
87
.746
.044
.588
.208
.405
6.
57.
-258.
594.
-351.
402
720
208
253
239
60.
90.
87.
-351.
273.
904
613
405
239
781
Al invertir (F .W.'F) el resultado es:
(F t .W.F)-1 =
0.002'
0.002
0.005
0.002
0
0.002
.0.004
0.008
0.003
0
0.005
0.008
0/262
0.25-3
0.238
0.002
0.003
0.253
0.260
0.251
0
0
0.238
0.251
0.250
F)-1.Ft =
Al multiplicar (Ft.W.F) 1.Ft se tiene
-0.017 0.021 -0.021 -0.003 -0.001 0.018 0.014 -0.020 0.004 -0.014
-0.003 0.042 -0.021 -0.017 0 0.004 -0.014 -0.020 0.019 0.014
0.002 0.170 -0.087 0.006 0.475 O 0.004 0.007 0.001 -0.004
-0.004'0.088 O 0.004 0.502 0.002 0.007 O 0.003 -0.007
-0.001 O O -0.001 0.500 -0.003 0.00 -0.002 -0.002 O
t _i tComo se esta utilizando Wj = 1.0, entonces el producto (F ,W.F) .F .
es igual al resultado anterior.

353
•*- i tPor último se hace: (F .W.F)~-.F .W.AY, para obtener la primera
aproximación a la mejor estimación; así AX es igual a:
' AX = £ 0.011 -0.051 -0.002 .0.095 0.033]
donde: A62 = .- 0...011 ; A63 = - 0.051
AVi = - 0.002 ; AV2 = 0.095 .; AV3 = 0.033
Ya que es necesario saber si los incrementos de las variables de
estado se encuentran'dentro de los limites de convergencia dados,
se busca el mayor incremento tanto del ángulo de fase ASn cuanto
de la magnitud del.voltaje AVp¿ los resultados son:
max A6p : - 0.011 = A62 > 0.0001
max AVp : | 0.095 = |AV2 > 0.0001
Ya que estos no cumplen con los criterios de convergencia dados ,
se corrigen los valores de ángulo de fase y magnitud de los volta_
jes de barra, asi:
v J = vp p
entonces los nuevos voltajes con los que se empieza la nueva itera_
ción serán:
Va = 1.048 p.u.
V2 = 1.095 p.u.; 62 = - °-011 (radianes)
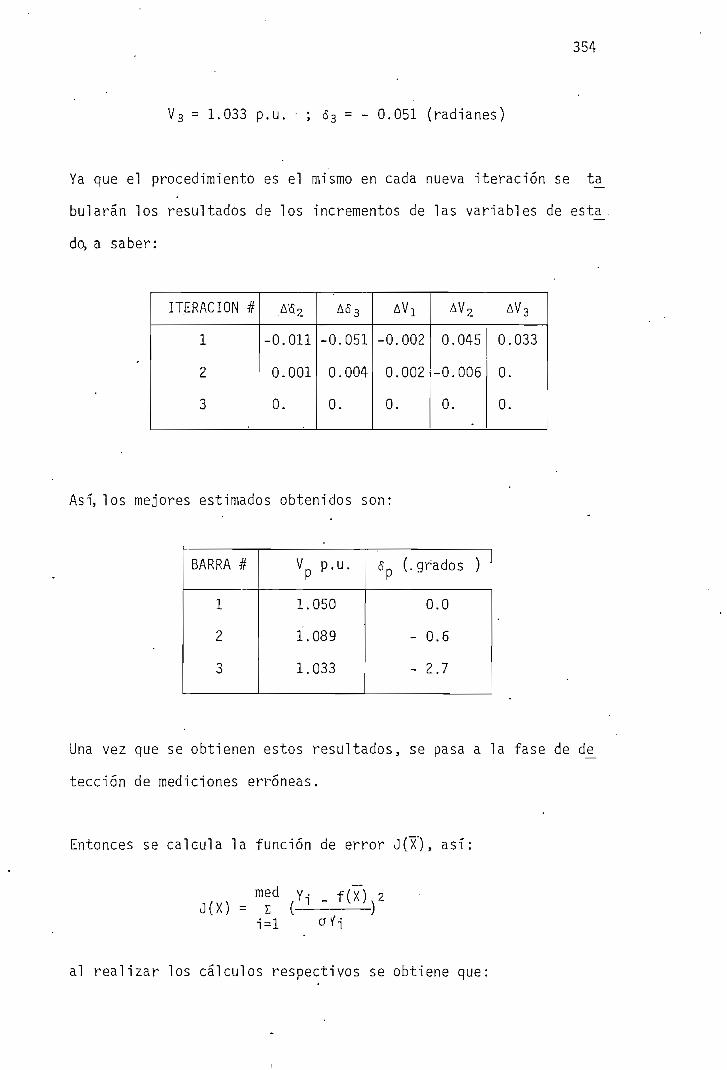
354
V3 = 1.033 p.u. • ; 63 = - 0.051 (radianes)
Ya que el procedimiento es el mismo en cada nueva Iteración se ta_
bularán los resultados de los Incrementos de las variables de
do, a saber:
ITERACIÓN #
1
2
3
A-6-2
-0.011
0.001
0.
A63
-0.051
0.004
0.
AVi
-0.002
0.002
0.
AV2
0.045
-0.006
0.
AV3
0.033
0.
0.
Así, los mejores estimados obtenidos son:
BARRA #
1
2
3
V p p . u .
1.050
1.089
1.033
6 (. grados )
0.0
- 0.6
- 2.7
Una vez que se obtienen estos resultados, se pasa a la fase de
tecclon de mediciones erróneas.
Entonces se calcula la función de error J(X). , así
, ,J ( X ) =
j - f ( X ) . 2
al rea l iza r los cá l cu los respectivos se obt iene q u e :
355
J(X) = 0.010
Los grados de libertad de la prueba se calculan de la siguiente ma_
ñera:'
R =- k - m K = # mediciones realizadas
m = # variables de estado a estimar
entonces R =•10 - 5 = 5 •
El valor de la distribución CHI-CUADRADO para 5 grados de libertad
es tj = 15.1 (99% de Confidencia).
De la prueba de hipótesis dada en la fase de detección de medicio-
nes erróneas se tiene que:
J(X) <_ tj ó 0.010 < 15.1
lo cual significa que se ha obtenido la mejor estimación de las va_
Hables de estado del S.E.P.
Si hubiera existido alguna medición errónea, lo más probable era
que J(X") no hubiera pasado la prueba de hipótesis en el análisis
de detección; en este caso, se hubiera seguido con el proceso de
identificación del valor erróneo, esto es:
- Calcular los residuos normalizados para cada medición.

356
Buscar el residuo normalizado más grande, y
Eliminar a la medición correspondiente al mayor residuo, para con_
tinuar nuevamente con todo el proceso de Estimación dado.

357
cc - .cc .c . :cC E S C U E L A . P O L I T É C N I C A N A C I O N A LCC 'C . I N G * . E L É C T R I C A P O T E N C I ACCC T E S I S D E G R A D OCCC - A G Q S T Q - 8 5CCCCC . -CC PROGRAMADO POR í JOSÉ RUBÉN CEDENQ ROMEROC TESIS DIRIGIDA PORÍ ING. GABRIEL ARGUELLO R»CCCC OBJETIVOÍEL PRESENTE TRABAJO CONSISTE EN DESARROLLAR LA TEORÍA DE ESTIMACIÓNC ' DE ESTADO PARA EVALUAR UN SISTEMA ELÉCTRICO DE POTENCIA EN TIEMPOC REAL Y ASI PODER DETECTAR Y DESMECHAR DATOS ERRÓNEOS HASTA OBTENERC - LOS MEJORES ESTIMADOS DE LAS VARIABLES DE' ESTADO DEL SISTEMA*CCc MÉTODO: PARA CUMPLIR CON EL OBJETIVO-PROPUESTO SE UTILIZA EL CRITERIO ESTA-C DÍSTICO DE LOS MÍNIMOS CUADRADOS PONDERADOSf ASI COMO EL MÉTODO DEC SOLUCIÓN DE NEWTQN-RAPHSON FORMAL» •CC DESCRIPCIÓN DEL METODOí EL PROCESO A SEGUIR ES EL SIGUIENTE!CC 1.- SE DESARROLLA UN CALCULO DE FLUJOS DE POTENCIA POR EL MÉTODO DEC NEWTQN-RAPHSQN FORMAL PARA OBTENER LOS VALORES MEDIOS DEL SISTEMAC DE POTENCIA.C . .C ' 2.- CON LOS VALORES DEL FLUJO SE SIMULAN MEDICIONES COMO SI FUERAN TQ-C MADAS EN TIEMPO REAL, SE EVALÚAN APLICANDO ITERATIVAMENTE LA EXPRE-C SION DE LA MEJOR ESTIMACIÓN! DX - (FT>WtF>x x(-l) * FT » H . DY ,C UTILIZANDO EL MÉTODO DE NEWTQN-RAPHSQN FORMAL»CC 3»- UNA VEZ QUE SE HA CUMPLIDO CON EL PASO ANTERIOR , EL SIGUIENTE ESC CALCULAR LA FUNCIÓN DE ERROR* COMPARAR CON EL VALOR CORRESPONDIENTEC DE LA DISTRIBUCIÓN CHI-CUADRADQ, PARA UN NUMERO DE GRADOS DE LIBER-C TAD ESPECIFICADOí Y ASI DETECTAR DATOS ERRÓNEOS: SI ES QUE- NO EXIS-C TENf PASA LA PRUEBA Y TERMINA EL PROCESO*Y»CC 4,- SI ES QUE EL VALOR DE LA FUNCIÓN DE ERROR NO PASA LA PRUEBAí SE EN-C CUENTRA EL MAYOR VALOR O RESIDUO NORMALIZADO , SE DESHECHA LA MEDI-C ' . CION CORRESPONDIENTE A ESTE VALOR Y SE REPITE EL PROCESO DESDE ELC PASO 2, ASI HASTA OBTENER LA MEJOR ESTIMACIÓN» 'C

358
—>, X
V
x.
X,
•v->->->->->
__ ,„*%
_ __ X,___ X,
LISTA DE VARIABLES A UTILIZAR
VARIABLES DE ENTRADA AL PROGRAMA PRINCIPAL
NOMBRE DESCRIPCIÓN
MODOSNELEMNBTCCQNVMAXITSWISBASECONFIGIÍ1PEDA
NODOINODQJETIPO
TAP
SUSCEP
BTIPO
EDADO.
FDADG
PGENQGENQGMIN
QGHAX
PCARGñQCARGANOMBRECREACT
NUMERO DE NODOS DEL SISTEMANUMERO TOTAL DE ELEMENTOS (LINEAS, TRANSF«rY CAP/REAC.)NUMERO DE GARRAS DE TENSIÓN CONTROLADAFACTOR 'DE CONVERGENCIAMÁXIMO NUMERO DE ITERACIONESSELECTOR DEL PROGRAMAPOTENCIA BASE EN MVAMATRIZ QUE INDICA LA CONFIGURACIÓN DEL SISTEMAVECTOR DE IMPEDANCIAS PRIMITIVAS DE LOS ELEMENTOS DE LAREDVECTOR QUE AGRUPA TODOS LOS NODOS P DE LOS ELEMENTOSVECTOR QUE AGRUPA TODOS LOS NODOS Q DE LOS ELEMENTOSVECTOR QUE INDICA EL TIPO DE ELEMENTO (SI ESÍ LINEA,TRANSF+iO CAP/REACT»)VECTOR QUE CONTIENE EL VALOR DEL TAP ASOCIADO A CADATRANSFORMADOR,VECTOR DE ADMITANCIAS A TIERRA CSUSCEPTANCIA) DE LOS E-LEMENTOS DE "CA RED,VECTOR QUE ALMACENA LAS INDICACIONES SOBRE EL TIPO DEBARRAí ES DECIR í SI ES SLACKr DE TENSIÓN CONTROLADA ODE CARGA*VECTOR DE VOLTAJES DADOS (PARTE REALhDE BARRAS í SLACKY DE VOLTAJE CONTROLADOVECTOR DE VOLTAJES DADOS (PARTE IMAG.) DE BARRAS! SLACKY DE VOLTAJE CONTROLADO,VECTOR DE POTENCIAS ACTIVAS GENERADASVECTOR DE POTENCIAS REACTIVAS GENERADASLIMITE MÍNIMO DE FOT* REACTIVAS EN BARRAS DE VOLTAJECONTROLADOLIMITE MÁXIMO DE FOT* REACTIVA EN BARRAS DE VOLTAJE -CONTROLADOPOTENCIAS ACTIVAS DE CARGA EN LAS BARRASPOTENCIAS REACTIVAS DE CARGA EN LAS BARRASNOMBRE DE LAS BARRAS (MÁXIMO ó CARACTERES)REACTIVOS ADICIONALES INYECTADOS EN LAS BARRAS
VARIABLES DE ENTRADA A LA SUBRUTINA ESTIMA
NMEDEMOD
DELTAMTIPOFTIPO
ESP
VALOR
NUMERO DE MEDICIONES SIMULADAS DEL SISTEMAVECTOR DE MÓDULOS DE VOLTAJErDADO PARA LA BARRA SLACK YASUMIDO Y CALCULADO PARA EL RESTO DE BARRAS,VECTOR DE ÁNGULOS DE FASE (EN RADIANES)TIPO DE MEDICIÓN SIMULADA PARA ANÁLISIS DE ESTIMACIÓNINDICA SI EL FLUJO DE POTENCIA ES EN LINEA O A TRAVÉSDE TRANSFORMADORES.VALOR QUE INDICA LA LOCALIZACION DEL TAPÍSI ESTA EN ELNODO P O EN Q,VALOR DE LA MEDICIÓN SIMULADA PARA EL PROCESO DE ESTI-MACIÓN
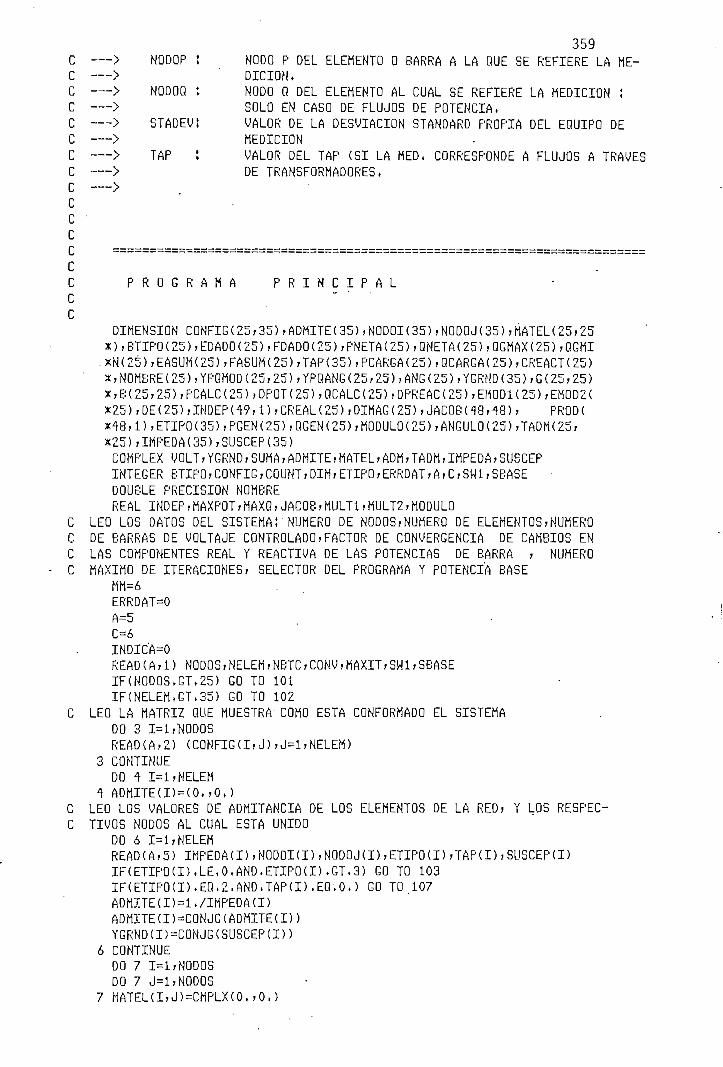
359C > NODOP í NODO P DEL ELEMENTO O BARRA A LA QUE SE REFIERE LA ME-C > DICION»C > NODOQ í NODO Q DEL ELEMENTO AL CUAL SE REFIERE LA MEDICIÓN !C > SOLO EN CASO DE FLUJOS DE POTENCIA»C > STAÜEVJ VALOR DE LA DESVIACIÓN STANDARD PROPIA DEL EQUIPO DEC > MEDICIÓNC > TAP t VALOR DEL TAP (SI LA MED» CORRESPONDE A FLUJOS A TRAVÉSC > DE TRANSFORMADORES,C >CCC
CC P R O G R A M A P R I N C I P A LC "C
DIMENSIÓN CQNFIG(25;35);ADMITE<35)fNQDQI(35);NQDQJ(35);MATEL(25>25x),BTIPG(25),EDADO(25>,FDADO(25),PNETAC25)íQNETAC25)iQGMAX(25),QGMI
. xN(25),EASUM(25),FASUM<25),TAP<35),PCARGA(25),QCARGA(25),CREACT(25)*»NOMBRE<25),YPQMQD(25,25),YPQANG<25f25)»ANG(25),YGRND(35)fG(25,25)xíB(25,25)yPCALC(25),DPOT(25),QCALC(25),DPREAC(25),EMODl(25),EMOD2(
x^8;l),ETIPO(35),PGEN(25),QGENC25),MODULQ(25),ANGULO(25)íTADM(25,x25),IMPEDA(35)»SUSCEP(35)COMPLEX VOLT;YGRNDrSUMA;ADMITE,MATEL>ADM;TADM>IMPEDA;SUSCEPINTEGER BTIPQ,CONFIG,COUNTíDIM,ETIPO,ERRDAT,A,C,SHlySBASEDOUBLE PRECISIÓN NOMBREREAL INDEP,MAXPOT,MAXQ,JACOB,MULT1,MULT2,MODULO
C LEO LOS DATOS DEL SISTEMA! NUMERO DE NODOS,NUMERO DE ELEMENTOS;NUMEROC DE BARRAS DE VOLTAJE CQNTROLADQrFACTQR DE CONVERGENCIA DE CAMBIOS ENC LAS COMPONENTES REAL Y REACTIVA DE LAS POTENCIAS DE BARRA , NUMEROC MÁXIMO DE ITERACIONES; SELECTOR DEL PROGRAMA Y POTENCIA BASE
ERRDAT=0
INDIC'A=0READ(Aíl) NODOSíNELEMiNBTCiCONVíMAXITiSWlfSBASEIF(NODOS*GT»25) GO TO 101IF(NELEM,GTt35) GO TO 102
C LEO LA MATRIZ QUE MUESTRA COMO ESTA CONFORMADO EL SISTEMADO 3 1=1/NODOSREAD(A,2) (CONFIG(IiJ)?J=liNELEM)
3 CONTINUÉDO 4 I=liNELEM
^ ADMITE(I)=(OtrO()C LEO LOS VALORES DE ADMITANCIA DE LOS ELEMENTOS DE LA RED» Y LOS RESPEOC TIVOS NODOS AL CUAL ESTA UNIDO
DO ó I=1,NELEHREADCAíS) IMPEDA(I)»NODOI(I)fNODOJ(I)íETIPO(I)>TAP(I)iSUSCEPCI)IF(ETIPO(I)fLE.6*AND.ETIPO(I)*GT,3) GO TO 103IF(ETIPO(I)*EQ*2»AND»TAP(I)«EQvO.) GO TO .107ADMITEÍI)=1*/IMPEDA(I)ADMITECI)=CONJG(ADMITE(I))YGRND(I)=CONJG(SUSCEP(I»
ó CONTINUÉDO 7 1=11 NODOSDO 7 J=lfNODOS
7 MATEL(l7J)=CMPLX(0,>0.)
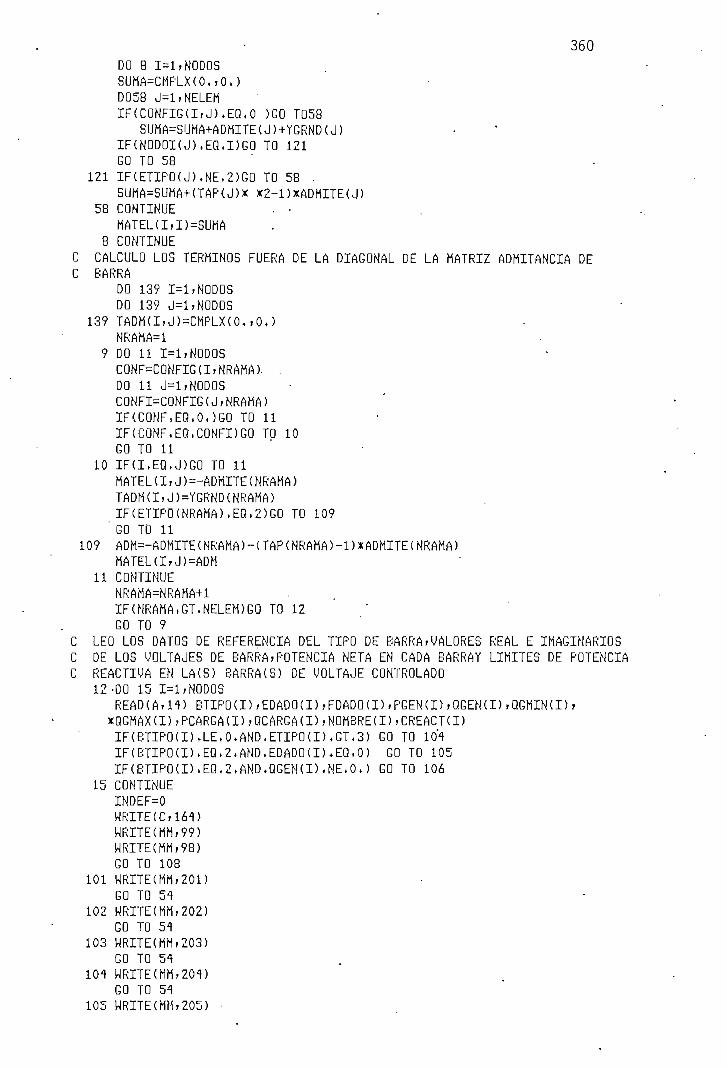
360DO 8 1=1 , NODOSSUMA=CMPLX(0.fO.)DQ58 J=lrNELEMIFíCONFIGCIrJKECUO )GO T058
SUMA=SUMA+ADMITE(J)+YGRND(J>IF(NODOIU).EQ,I)GO TO 121GO TQ 58
121 IF(ETIPO(J).NE,2)GQ TO 58 -SUMA=SlfflA+(TAP(J)x x2-i)xADMITE(J>
58 CONTINUÉ . -MATEL(I,I)=SUMA
8 CONTINUÉC CALCULO LOS TÉRMINOS FUERA DE LA DIAGONAL DE LA MATRIZ ADMITANCIA DEC BARRA
DO 139 I=liNODOSDO 139 J=li NODOS
139 TADh(I,J)=CMPLX(0«>0.)NRAMA=1
9 DO 11 1=1 1 NODOSCGNF=CGNFIG(I,NRAMA>. .DO 11 J=li NODOSCONFI=CQNFIG(J,NRAMA)IF(CONF*EQ*0. )GO TO 11IFCCONF.EQ.CONFDGO TQ 10GO TO 11
10 IFCI.EQ.JJGO TO 11MATEL ( I r J ) =~ADMITE C NRAMA )TADM(IiJ)=YGRND(NRAMA)IF(ETIPQ(NRAMAKEQ*2)GQ TO 109
" GO TO 11109 ADM^-ADMITE(NRAMA)-(TAP(NRAMA)-i)*ADMITE(NR.AMA)
MATEL(IfJ)=ADM11 CONTINUÉ
NRAMA=NRAMA+1IF(NRAMA,GTvNELEM)GQ TO 12GO TO 9
C LEO LOS DATOS DE REFERENCIA DEL TIPO DE BARRA? VALORES REAL E IMAGINARIOSC DE LOS VOLTAJES DE BARRA i POTENCIA NETA EN CADA BARRAY LIMITES DE POTENCIAC REACTIVA EN LA(S) BARRA(S) DE VOLTAJE CONTROLADO
12 -DO 15 1=1, NODOSREAD(AiH) BTIPO(I) íEDADO(I) f FDADO(I) f PGEN(I) íQGEH(I) fQGMIN(I) 7
xQGMAX(I)iPCARGA(I)jQCARGA(I)jNOMBRECI)iCREACTCI)IFÍBTIPOÍD.LE.O^AND.ETIPOCD.GT.S) GO TO 10*4IF(BTIPO<IKEQ*2*AND*EDADO(IKEQ*0) GO TO 105IF(BTIPO(I),EQ*2*ANDiQGEN(I)«NE*0») GQ TO 106
15 CONTINUÉINDEF=0
WRITEÍMMÍ99)HRITE(MM;98)GO TO 108
101 HRITE(MMiZOl)GO TO 5
102 WRITEÍMM7202)GO TO 5
103 WRITE(MMr203)GO TO 5
104 WRITE(MGO TO 51
105 WRITE(MMfZ0

361GO TO 54
106 KRITE(MMr206)GO TO 54
107 HRITE(MM,207)GO TO 54
108 HRITE(C>142)WRITE(C>72)WRITE(Crl40)WRITE ( C 1 14 1 ) NODOS > NELEM r NBTC , CQNV r SBASEKRITE(C>138)WRITE<C*143)WRITECCílóS)DO 149 I^lrNELEMSUSC=AIMAG(SUSCEP(I»IF(ETIPO(IKEQ*3)GQ TO 147IF(ETIPQ(IKECU2)GQ TO 145W R I T E ( C j V 4 4 ) I í N O D O - I ( r ) í N O D O J ( I ) F l M P E D A ( I ) f S U S C > E T I P O ( I >GO TO 149
145 W R I T E ( C i l 4 6 ) I f N O D O I ( I ) f N D D O J ( I ) f I M P E D A ( I ) i S U B C > E T I P O ( I ) f T A P ( I )GO TO 149
147 WRITE(Cil48)IiNODOI(I)yNQDOJ(I)fIMPEDA(I)rSUSC>ETIPO(I)149 CONTINUÉ
WRITE(C>162)URITE(Crl53>
DO 161 I=1;NODQSIF(BTIPO(I)»EQ*2) GO TQ 1571F(BTIPG(IKEEK3> GQ TO 159 "
.WRITE(Cfl56)IrEDADO(I)fFDADO(I)GO TO 161
157 HRITE([M58) I f E D A D G ( I ) íFDADO(I) r P G E N ( I ) ? PCARGA(D j Q C A R G A C D i Q G H A Xxd)iQGMIK(I)
GO TO 161159 WRITE(Cil60) IrPGEN(I) 7QGEMÍI) jPCARGA(I) yQCARGA(I)101 CONTINUÉ
C IMPRIMO LA MATRIZ ADMITANCIA DE BARRAIF(NODOS(LE,6)GO TO 110GO TO 111
110 HRITEÍCrlSO)DO 151 1=1, NODOSWRITE(CFl3)(MATEL(l7J)fJ=liNODOS)
151 CONTINUÉ111 DO 152 I=lfNODOS
PNETA(I)=PGEN(I)-PCARGA(I)QNETA(I)=QGEN(I)-QCARGA(I)
152 CONTINUÉDO 17 J=lrNQDQSIF(BTIPO(J),NE(3)GO TO 16EASUM(J)=1.FASUMCJ)=0.GO TO 17
16 EASUM(J)=EDADQ(J)FASUM(J)=FDADO(J)
17 CONTINUÉC PROCEDO A CALCULAR LAS POTENCIAS ACTIVAS DE TODAS LAS BARRAS EXCEPTOC PARA LA BARRA SLACKC INICIO LA CUENTA DE LA ITERACIÓN : COUNT=1
COUNT=1. DO 18 II=liHODOS
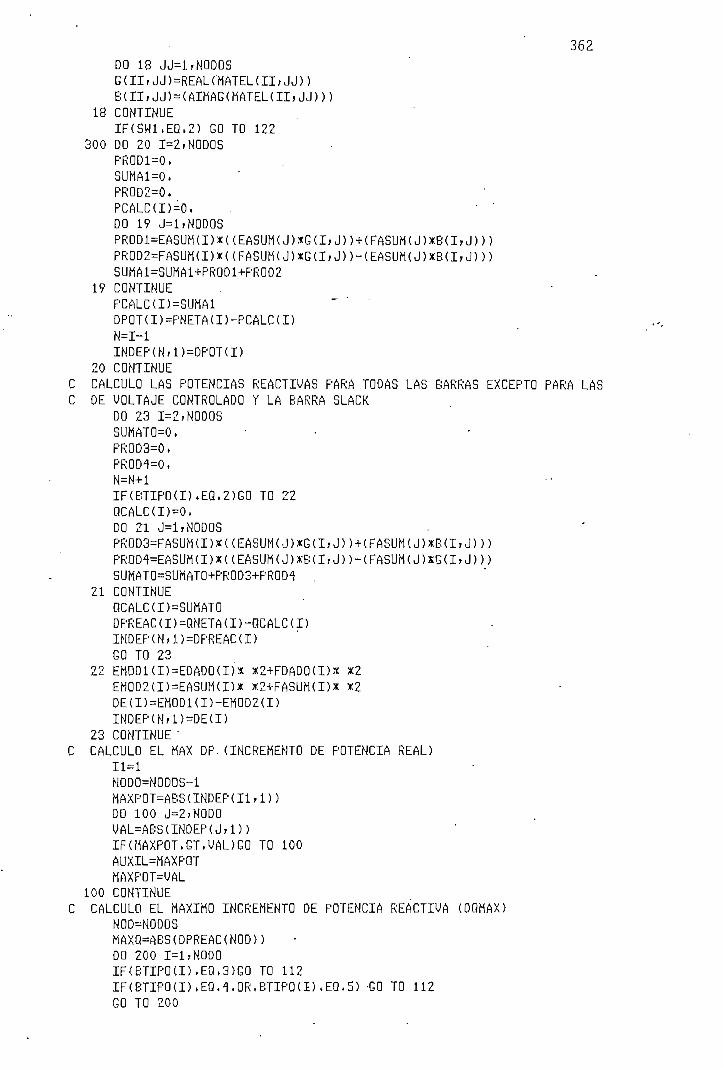
362DO 18 JJ-lrNQOOSGdli JJ)=REALCMATEL(IIíJJ»B(IIiJJ)=(AIMAG(MATEL<IIjJJ)))
18 CONTINUÉIF(SW1.EQ»2) GO TQ 122
300 DO 20 1=2 r NUDOSPRODIGO.SUMAi=0.PROD2=0.PCALC(I>=0.DO 19 J=1>NQDQSPRODí=EASUM(I)x(<EASUM(J)xG(IíJ))+(FASUM(J)xB(IiJ))>PROD2=FASUM(I)x<(FASUH(J)xG(IiJ))-<EASUM<J)xB(IiJ>>)SUMA1=SUMA1+PROD1+PROD2
19 CONTINUÉPCALC(I)=SUMA1 " ' 'DPOT(I)=PNETA(I)-PCALC(I)N=I-1INDEP(Nfl)=DPQT(I)
20 CONTINUÉC CALCULO LAS POTENCIAS REACTIVAS PARA TODAS LAS BARRAS EXCEPTO PARA LASC DE VOLTAJE CONTROLADO Y LA BARRA SLACK
DO 23 I=2>NQDOSSUMATQ=0,PR003=Oi
IF(BTIPO(I)»EQ.2)GO TQ 22QCALC(I)=0,DO 21 J=líNODOSPROD3=FASUM(I)x((EASUM(J)xG(IjJPROD^=EASUH(I)x((EASUH(J)XB(l7j))-(FASUM(J)xG(IfJ)))SUMATQ=SUMATG+PROD3+PROD^
21 CONTINUÉQCALC(I)=SUMATQDPREAC(I)=QNETA(I)-QCALC(I)IMDEP(Nil)=DPREAC(I)GO TO 23
22 EMQDl(I)=EDADO(I)x %2+FDADO(I)ív: x2EMOD2(I)=EASUM(I)x x2+FASUH(I)x x2DECI)=EhODKI)-EMOD2(I)INDEP(Nil)=DE(I)
23 CONTINUÉ 'CALCULO EL MAX DP- (INCREMENTO DE POTENCIA REAL)
11=1NODQ=NQDQS-1MAXPOT=ABS(INDEP(Ilfl)>DO 100 J=27NODOVAL=ABSCINOEP(J,D)IF(MAXPOT»GT.VAL)GO TO 100AUXIL=MAXPQTMAXPOT=VAL
100 CONTINUÉCALCULO EL MÁXIMO INCREMENTO DE POTENCIA REACTIVA (DQMAX)
NQD^NODQSMAXQ=ABS(DPREAC(NOD))DO 200 I=ITNODOIF<BTIPQ(I).ECK3)GO TO 112IF(BTIPO(I)»EQ^.OR,BTIPO(I).EQ.5) -GO TQ 112GO TO 200

363112 IF(MAXtKGT,ABS(DPREAC(I)))GO TO 200
AUX=MAXQMAXQ=ABS(DPREAC(I»
200 CONTINUÉC PRUEBA DE CONVERGENCIA
IF(MAXPQT*LE + CQNV.)GQ TO 113GO TO 111
113 IF(MAXQ*LE.CGNy)GQ TO 51C PROCEDO A CALCULAR LAS COMPONENTES REAL E IMAGINARIA DE LA CORRIENTEC EN CADA BARRA EXCEPTO PARA LA.SLACK .
114 DO 25 I=2íNODOSCREAL(I)=0»DIMAG(I)=0»Cl=EASUM("l)xG(l7l) .Dl=FASUM(I)xG(IiI)C2=fASUM(I)xB(IfI)D2=EASUM(I)xB(IfI> "
DO 24 J=:IFU.EGUDGQ TO 24C3=(EASUMJ)xGCI>Jm(FASUM(J)xB<InJ»
. D3=(FASUM(J)xG(IrJ))-(EASUM(J)xB(I>J))SUMAT=SUMAT+C3SUM=SUM+D3.
24 CONTINUÉCREAL(I)=C1+C2+SUMATDIMAG(I)=D1~D2+SUM •
25 CONTINUÉc CALCULO' DEL JACOBIANOC ELEMENTOS DE J-l
DO 28 I=2)NODOSM=I-1DO 27 J=2íNODOSN=J-iIF(J,EQ*I)GO TO 26
GO TO 2720 JACOB(MiN) = <EASUM(I)xG(IiJ»-(FASUM{I)xBCIiJ»+CREAL(I)27 CONTINUÉ28 CONTINUÉELEMENTOS DE J-2
DO 31 I=2iNODOSM=I-1DO 30 J=liNODOSIF(BTIPOCJ),EQ»1) GO TO 301N=N+1IF(I*EQ,J)GO TO 29JACOBCMiN)=(EASUH(I)xB(IjJ))+(FASUM<I)xG(IiJ»GO TO 301
29 JACOBÍMIN)=(FASUM(I)xG(IIJ))+(EASUM(I)xB(l7J))+DIMAG(I)301 MN=2x(NQDQS-l>
IF(MN.EQ(N)GO TO 115GO TO 30
115 N=NODQS-130 CONTINUÉ31 CONTINUÉ
N=0ELEMENTOS DE J-3 Y J-5
DO 37 I=2iNODOS

364H=M+1IF(BTIPQ(I),EQ,2)GO TQ 33DO 36 J=2rNQDGSN=J-1IF<J,EQ»I)GO TO 32
GO TO 3632 JACOB(MiN)=(EASUM(I)xB(IjJ))+(FASUM(I)xG(IIJ))-DIMAG(I)30 CONTINUÉ
GO TO 3733 DO 35KJ=2» NODOS
N=KJ-1IF(KJ«EQ.I)GO TO 34JACOB(MjN)=0,GO TO 35
34 JACQB(MíN)=2xEASUM<I)35 CONTINUÉ37 CONTINUÉ
C ELEMENTOS DE J-4 Y J-óNM=NNN=NDO 43 I=2i NODOSNM=NM+1IF(BTIPO(IKEQ.2>GG TO 39DO W J=líNODOSIF(BTIPO(J)*EQ»1) GO TO 303NN=NN+1IF(J.EQ»I)GO TQ 38JACOB(NMiNN) = (FASUM<I)xB(IfJ))'-(EASUM(I)*G(I,J))GQ TO 303
33 JACOB(NHfNN)=(FASUM(I)xB(IíJ))-CEASUM(I)xG(I/J))+CREAL(I)303 MN=2x(NODOS-l)
I F ( M N * E Q » N N ) G O TQ 116GO TO °i2
116 NN=NQDQS-142 CONTINUÉ
GO TO 4339 00 41LJ=1;NODOS
IF(BTIFQ(LJ),EQ,1) GO TO 302
IF(LJ*EQ»I)GO TO 40JACGB(NM>NN)=0(
GO TO 30240 JACQB(NH7NN)=2»:FASUM(I) ' '302 IF(MN»EQ,NN)GO TO 117
GQ TQ 41117 NN=NODOS-141 CONTINUÉ43 .CONTINUÉ
C INUIERTO LA MATRIZ JACQBIANA PARA LUEGO PROCEDER A MULTIPLICARLA POR ELC TERMINO INDEPENDIENTE (INCREMENTO DE POTENCIAS Y MODULO DE VOLTAJE)
DIM=2X(NODQS-1)CALLINVERT(JACQBíDIM;48F48,INDEF>IF(INDEFiEQ.l) GO TO 54
C LLAhO A LA SUBRUTINA MULTCALL MULTCJACOBíINDEPíPRQDiDIMiDIM^Bi^a^eHB)
C CON LOS RESULTADOS DE LA MATRIZ FRQDr CALCULO LOS NUEVOS VALORES DE LOSC VOLTAJES DE BARRA . .
DO 41 I=2fNODOS
365EASUM(I)=EASUM(IHPROD(JI,1)
44 CONTINUÉDO 45 J=2rNODQSJI=JI+1FASUMÍJ)=FASUM(J)+PRQD(JIrl)
45 CONTINUÉC CON ESTOS NUEVOS VALORES DE VOLTAJE DE BARRA,CALCULO LAS POTENCIASC REACTIVAS PARA LAS BARRAS DE TENSIÓN CONTROLADA
DO 47 I=1>NODGSIF(BTIPQd)(EQ,2)GQ TO 118IF (BTIPOdKEG,4) GO TO 118I F ( B T I P O ( I ) * E Q * 5 ) GO TO 118GO TO 47
118 MULT1=0.MULT2=0,QCALCd>=0,DO 46J=1;NODOSMULTl=MULTl+FASUM(I)x(EASUM(J)xG(IiJ)+FASUMCJ)xB(IfJ))MULT2=MULT2+EASUMdWFASUM(J)*Gd7J)-EASUh(J)xBdTJ))
40 CONTINUÉQCALCd)=MULTl-MULT2
47 CONTINUÉC VEO SI LOS VALORES DE POTENCIA REACTIVA CALCULADO PARA LAS BARRAS DEC TENSIÓN CONTROLADA ESTÁN DENTRO DE LOS LIMITES
DO 50 I=2íNODOSIF (BTIPO<IKEQ*3) GO TO 50QGEN(I)=QCALC(I)+QCARGA(I)IF(BTIPO(I)*EQ,2)GQ TO 119IFCBTIPQdKEQ.4) GO TO 120IF(BTIPÜ(I)*EEU5) GO TO 127GO TO 120
119 IF(QGENd) ,GTtQGMAX(I))GO TO 48IF(QGENd) *LT»QGMIN(I))GO TQ 49
120 GO TO 5048 BTIPO(I)=4
QGEN(I) =QGHAXCI)GO TO 50
126 IF(QGENd) »GT*QGHAX(D) GO TO 48IF(QGENd) *LT»QGMIN(D) GO TQ 49BTIPO(I)=2QGEN(I)=0.GO TO 50
127 IF(QGENd) .LT.QGMINCI)) GO TO 49IF(QGENd) ,GT.QGMAX(I)> GO TO 48BTIPOÍD-2QGEN(I)=0»GO TO 50
49 BTIPO(I)=5QGENd) =QGMIN(I)
50 CONTINUÉCOUHT=COUNT+1IF(COUNTtGTtMAXIT)GO TO 53GO TO 300
51 DO 306 1=21 NODOSIF(STIPOdKEQ.4) GO TO 304I F ( B T I P Q d ) f E Q < 5 ) GO TO 305
' GO TO 300304 HRITE(Cí550) I
GO TO 300305
366306 CONTINUÉ
WRITE(C,56)COUNT122 PHI=3t141592654
DO 57 I=Í,NQDQS ' -
VOLT =ChPLX(EASUM(I)rFASUM(I)) •MQDÚLO(I)=CABS<VQLT)ANGULO(I)=ATAN(FASÚM(I)/EASUH(D)ANG(I)=ANGULO(I)xl8(K/PHI .
57 CONTINUÉ' DQ 59 I=1>NQDOSDO 59 0=lfNQDQSYPQMOD(I,J)*CABS(MATEL(IfJ>)IF(G(I)J).EQ*0,)GQ TO 60IF(GÍI,J),LT*0+)GQ TO 63IF(B(I>J)*EQi(K)GQ TO 66YPQANG(IiJ)=ATAN<BCIfJ)/G(IfJ»GQ TO 59
60 IF(B(IiJ)*GT*0*)50 TO 61IF(B(IiJ).EQ.O*)GO TO 62YPQANG(IjJ)=-PHI/2. .GQ TO 59
61 YPQANG(IrJ)=PHI/2*GO TO 59
62 YPQAHG(IrJ)~0.GO TO 59
63 IF(B(IiJ)+EQ*0*)GO TQ 64IF<B(IiJ)»GT* 0*)GO TO 65AUXl=ATAN(B(IíJ)/G(IfJ))AUX2=AUXlxl80*/PHI-180^'YPQANGCIfJ)=AUX2XPHI/180*GO TO 59
64 YPQAHG(I?J)=PHIGO TO 59
65-AUXl=ATAN(B(IfJ)/G(IíJ)>AUX2=AUXlxl80»/PHI+180+YPQANG(IjJ)=AUX2xPHI/180»GO TO 59
66 YPQANG(IíJ)=0*5? CONTIHUE
IF(SWltEQ*2) GO TO 123C LLAMO A LA SUBRUTINA QUE REALIZA LOS CÁLCULOS DE FLUJOS DE POTENCIA EN LASC LINEAS
1=1PCALC(I)=0»QCALC(I)=(K - • •DO 76 J=1;NODOSSUHMOO=MODULO(I)xMODULO(J)xYPQMOD(IfJ)SUMANG=YPQANG(IjJ)+ANGULO(I)-ANGULO(J)PCALCCI)=PCALC(I)+ABS(SUMMOD)XCOS(SUHANG)QCALC(I)=GCALC(I)+ABS(SUMMOD)XSIN(SUMANG)
76 CONTINUÉWRITE(C»163)CALL FLUJOSCNELEMíNODGSfEASUMiFASUMíPCALCí MATEL rTAPrNODQ
xQJíETIPOiQCALCiNGMBREíMODULOiANGfPGENfQGENiPCARGAfQCARGAíCREACTixYGRND)IFÍSHl.EQ.l) GO TO 5
123 WRITE(Cf73)HRITE(Cr75)
CALL ESTIMA(MODOS,YPQMOD,YPQAHGtMODULO iANG,EASUM,FASUMiPCALC,QCALC

367ICAíTADM)
IF(INDICA.EQ.l) GQ TO 5*IF(NMED.LT,2XNQDOS-1) GO TO 54IF(ERRDAT.EQ.l) GO TO 51 -IFdNDEF.EQvl) GO TO 54 •KRITEÍC7161)HRITE(Cr351)IF(SW1.EQ,Z) GO TO 353DO 352 I=l7NQDÜS
' PCARGA(I)=PCARGA(I)/100.QCARGA(I)=QCARGA(I)/100.
352 CONTINUÉ353 CALL FLUJOSCNELEMiNOOOSFEASüMfFASUMíPCALCiMATELíTAPjNOOOIfNODOJíET
xlPOíQCALCiNOMBREFMODULOiANGiPGENfQGENiPCARGAiQCARGAfCREACTíYGRND)GO TO 51
CC F O R M A T O SC
2 FQRHAT(35I1)
14 FORMAT<I2i2(E7*3),Z(E10»3)i2(E5*2)f2<E10,3)>A6iF8,3)72 FGRMAT(I1'>//72GX792('XI)7//753X71P-R I M E R A P A R T E ',//)64 FQRMATÍ /A64Xf4( '*' ))99 FORMAT('ll7////33X756('xl)7Y33X7'xM3X7'ESCUELA POLITÉCNICA NACIÓ
xNAL1 ,13X7 'xS/SSXr'*' 754X7 lx',/33X7lxMXrl JOSÉ RUBÉN CEOENO ROMERXQ1 73X> 'FACULTAD DE ING ELÉCTRICA MXi '*' ,/33X> '*' ,54X7 '*' i /33X? 'x1x,19Xi 'TESIS DE GRADO' TÍ9X, 'x',/33Xf56( l x l ))
98 FORMAT(////33Xr'TEMAÍ x x INTRODUCCIÓN A LA ESTIMACIÓN DE ESTA'xOO'í/SSXílOXí'EN SISTEMAS ELÉCTRICOS DE POTENCIA x ^'r5(/);33X;x'TESIS DIRIGIDA PQRÍ ' r4Xf 'ING* GABRIEL ARGUELLO RÍOS» ' »3</) »74
201 FORHATCr^QXí1 ERROR EN DATO DE NUHERQ DE MODOS CNODOS>25)')202 FQRMATC I1 720X7 'ERROR EN DATO. DE NUMERO DE ELEMENTOS (NELEM>35) ')203 FORMATC I1 720X7 'ERROR EN DATOÍCHEQUEAR VALORES. DE TIPO DE ELEMENTO
x 1 )204 FORMAK 'I1 720X7 'ERROR EN DATOÍ CHEQUEAR VALORES DE TIPO DE BARRA1)205 FORMATC11 T20X71 ERROR EN DATO! MODULO DE VOLTAJE EN BARRA DE VOLT,
x CONTROLADO ES = O (E*D* PARTE REAL DEL VOLTAJ ES O 1)200 FORMATC '1-720X7 'ERROR EN DATOÍ VALOR DE Q DE GEN» EN BARRA DE VOLT
«AJE CONTROLADO ES DISTINTO DE O ' )207 FORMATC11 720X71 ERROR EN DATOÍ TAP DE UN TRANSFORMADOR ES =0')142 FORMATÍ //7Ó4X74( 'x' ))110 FORMATC 10(7)751X7 'DATOS GENERALES DEL SISTEMA1 7/>51X730( 'x1 ),//
x/)141 FORMATÍ20X7 'NUMERO TOTAL DE NODOS' 78X7 '=' 7l4?/7/720X7 'NUMERO TOTAL
x DE ELEMENTOS1 7lXf'=' 7117/7/720X7 'NUMERO DE BARRAS DE TENSIÓN CONTXROLADA1 72X7 '=' ;I47/7/>20X7 'FACTOR DE CONVERGENCIA1 ,7X, '=' 7F7t37/>/x, 20X7 'POTENCIA BASE ..... + ,, * ' 77Xr '=' 72X713 ?1X7 'MVA1 j///)
138 FORMATÍ//746X7 'DATOS DE LOS ELEMENTOS DEL SISTEMA ' i/j4ÓXi39( 'x x')i//)
113 FGRMATC//75X7 'ELEMENTO1 71X7 'NODQP'rIXf'NQDOQ' 77X71 IMPEDANCIAx MXí' SUSCEPTANCIA '78X7 'TIPO DE ELEMENTO1 77X, ' TAP1
x,//)165 FORMAT(36XT 'RESISTENCIA' /3X7 'REACTANCIA' 7/745Xf! ---- TODOS LOS VALO
xRES ESTÁN DADOS EN CP.U>')141 FaRMAT(8X>I278X7l277XrI2J5X7F10t57lX7FlO,5í 9X; F10*57l7X7 'L
146 FORMAT(3X7l278X7l277XrI275X7FlO,5r1X7FlO,57 9X7F10(57l7X7 'TxRANSF.'7lX7'(Mlr ')'r5X7F8í4 »/)
368
H8 FORMAT(8XrI2í8XíI2í7XrI2í5XíFlO(5r1XfFlO(5í 5xAP/REACT'r2X;'(',11,')'r5X> F8.4r/)
162 FORMATÍ'l'r/AÓ^X^Í'x'))153 FQRMAT(//r52Xf'DATOS DE BARRAS ÍCASO BASE)'7151 FORMATÍ//r 2XÍ'BARRA'i3X,'TIPO',4X>'VOLTAJE DADO'^Xí'P DE GENERAC
xt',3Xf'Q DE GENERAC*'?3Xí'P DE CARGA 1>3Xf'Q DE CARGA1,3Xr'MAX Q DEx GENERAC,'fSXr'MIN Q DE GENERAC,' )
155 FORMATÍ 4Xi'N1 f HX>'REAL'iZXi'IMAG1 i9Xi'—- TODOS LOS DATOS DELx SISTEMA ESTÁN DADOS EN (P»U).li/)
1SA trnC'MATi1 T Y . T 9 . Á Y . f P * Q ' . Q Y C¿ T . 1 Y F^ 1 \O rUr \nH l \r D t O rOA T rO t Oí J. A í r O » ¿. J
1SQ FnPMATí1 Q Y . y J . A Y . 1 PTP ' , QY TX T 1Y T^ T . Á Y TR A .'^'SY [TD a ^V CDloo rUhnHIV JAíJ.¿;oAí t« I L ÍOAÍ ro v O í I A T T O t^lí OAÍ rot" f / J A r r o t T ÍÜAÍ r o»ü íA iRy» Ffl J-J»1''V» PR ^^
160 FORMATÍ .3XrI2f6Xí'BÍC1 iZlX? F8.4í8Xi FS^r/Xí F8*^f5Xi F8,^)150 FORMAT(5(/)i53Xí'MATRIZ ADMITANCIA DE BARRA'T/753X/26Í'x1)/)
550 FORMATÍ// TÍ5X,'LA BARRA MZíSXf'SE CONVIERTE EN BARRA DE CARGA1
x,/ ,15X>'MOTIVO I VIOLACIÓN EN RESTRICCIÓN DE QGMAX ')650 FORMATÍ// ílSXr'LA BARRA MZ/SXi'SE CONVIERTE EN BARRA DE CARGA1
x,/ ,15X7'MOTIVO I VIOLACIÓN EN RESTRICCIÓN DE QGMIN ')250 FORMATÍ1l'/í57Xj'VOLTAJES DE BARRA'í/i57Xi!7('x1)/)56 FORMAT(///il5X/'LA SOLUCIÓN CONVERGE EN 'ílZíZXr'ITERACIONES'i//)
7 3 F O R M A T ( 1 l ' r / / ? 2 0 X I 9 2 ( ' x 1 ) , / / , 5 3 X í 1 S E G U N D A P A R T E ',//)7 5 FORMATÍ6 ( / ) f ^ 7 X f ' T E Q R I A D E E S T I M A C I Ó N ' j / f 4 7 X i 3 7
7 FORMATCX/í^lX/1 EN ESTA PARTE SIMULAREMOS EL FUNCIONAMIENTO DE LAx'f/HZXr'TEORÍA DE ESTIMACIÓN EN UN CENTRO DE CONTROLi LA'í/^ZXix'MISMA QUE CONSISTE EN PROCESAR UN CONJUNTO DE ME- ' i/^ZX» 'DICIONXES REDUNDANTES (TOMADAS EN TIEMPO REAL) DEL'í/j42Xf'SISTEMA, ELIMIXNANOO LAS MEDICIONES ERRÓNEAS HASTA 'f/;42Xf'OBTENER EL MEJOR'ESTXIMADÓ DE LAS VARIABLES DE ES- S/iHXi1 TADO DEL S.E.P*
351 FORMATÍ'l'jíSXf'TABLA DE FLUJOS DE POTENCIA CALCULADOS fxARTIR DE LOS VALORES OBTENIDOS AL APLI-'f/f^ÓXr'CAR LA TEORÍA DE EXSTIMACION DE ESTADO. S/)
450 FGRMATÍ///>15X>'LA SOLUCIÓN NO CONVERGE1i/yl5XíZ3('x'»53 WRITE(C^SO)5 CALL EXIT
END
SUBROUTINE MULTÍAAlTBBlrCCl^DIMlíDIMZrNAlíNAZíNA3rNA^)DIMENSIÓN AAÍ(NAlyNA2)fBei<NA3fl)jCCHNA4il>INTEGER DIMlíDIMZDÜ 1 I=lrDIMlJ=l
DO 1 MM-17DIM2CCKIf J)=CCl(IfJ)+AAKIiMM)xBBl(MMjJ)
1 CONTINUÉ
RETURNEND
SUBROUTINE INVERTÍAAZiNíNASíNAÓíINDEF)DIMENSIÓN AA2(NA5jNA6)fLT(79)INTEGER CC=6L=NDO 2 J=lrL
2 LTÍJ)=0Tl=0.

369
DO 10 H=lrLDO 1 L1_=1>LIF (LT(LDtECM)GQ TO 4IF((ABS(AA2(LL,LL))-ABS(T1))*LE.(K)GQ TO 4Tl=AA2(LLrLL)K=LL
4 CONTINUÉIF(ABS(T1).EGUO.)GQ TO 14 .Tl=0«
• LT(K)=1DO 8 1=1,LIF (I.ECUÍ) GO TO 8DO ó J=1,LIF(J>EQ.K)GO TO 6AA2(I,J)=AA2(I,J)-AA2a>K)xAA2CK,J)/AA2(K,K)
ó CONTINUÉ8 CONTINUÉ
AA2(KiK)=-l*/AA2(K»K)DO 10 1=1,LIF(I*EQ.tK) GO TO 10 .AA2(I,K)=AA2(IiK)acAA2(k,-K)AA2(K7l)=AA2(KiI)xAA2(K,K)
10 CONTINUÉDO 12 J^lrLDO 12 K=liL
12 AA2(J,K)=-AA2(J7K)RETURN
H INDEF=1VÍRITE(Crló)'RETURN
ccc
r
F O R M A T O S
16 FORMAT( / / / />55X; 'NQ SE DEFINE LA INVERSA, ' >A55Xi 'POFXTOS DE 1 í / í 5 5 X f 'ALGUNA PARTE DEL SISTEMA' , / ,56Xf20( ' a
END
< FALTA DE DAs ' ) )
SUBROUTINE FLUJOSÍNELEM,NODOS,EASUM,FASUM»PCALC, hATEL ,TAPíNODXQI,NODOJ,ETIPO,QCALC,NOMBRE,MODULO,ANG,PGEN,QGEN,PCARGA,QCARGAíCRExACTíYGRND)DIMENSIÓN YGRNDÍ35),ETIPO(35)^TAP(35),NODOI(35)iNODOJ(35),POT(25
x,25),PREAC(25i25)íBB(35),GG(35)fEASUM(25)rFASUM(25)íRELTRA(25i25)ixMATEL(25,25),NOMBREC25),MODULO(25)fANG(25),P'GEN(25),QGEN(25),PCARGxA(25),QCARGA(25)iCREACT(25),CC(35),PCALC(25)iQCALC<25) '.REAL MODULOCOMPLEX hATEL*YGRNDDOUBLE PRECISIÓN NOMBREINTEGER P,Q,ETIPO,CC=6MH=6DO ^2 I=líNODOSPGEN(I)=PCALC(I)+PCARGA(I)QGENCI)=QCALC(I)+QCARGA(I)PGEN(I)=PGEN(I)xlOOQGEN(I)=QGEN(I)xlOOPCARGA(I)=PCARGA(I)xlOOQCARGA(I)=QCARGA(imOO
42 CONTINUÉDO 150 1=1,NODOSDO 150 J=1»NODOS

370
POT(IiJ)=0.00PREAC(IiJ)=0.00RELTRA<IíJ)=0.00
150 CONTINUÉ -DO 2 I=1,NELEHGG<I)=0,BB(I)=0,CC(I)=0.IFCETIPO(IKEQ,3)GO TO 2P=NODOI(I)Q=NODOJ(I)GG(I)=REAL(MATEL(P7G) )*(-!.)BB(I)=AIMAG(MATEL<PfQ))x(- l . )CC(I)=AIHAG(YGRND(I))IF(ETIPO(I)tNE,l)GO TQ 1DIF1=EASUM(P)-EASUM(Q)DIF2=FASUH(P)-FASUH(Q)PGT(PFQ)=(EASUM(P)XDIF1+FASUM(P)XDIF2)XGG(I)+(EASUM(P)XDIF2-FASUM(
POT(QfP)=(EASUM(Q)x(-DIFl)+FASUM(Q)x(-DIF2))»£GG(I)+CEASUM(Q)x(-DIFx2)-FASUH(Q)x(-DIFl))xBB(I)PREAC(PiQ)=(EASUM(P)xDIFl+FASUM<P)xDIF2)*BB(I)+(FASUH(P)xDIFl-EASUxM(P)xDIF2)xGG(I)+(EASUH(P)x x2 +FASUM(P)x «2 )xCC(I)PREACCQiP)=(EASUM(Q)»(-DIFl)+FASUM(Q)x(-DIF2))xBB(I)+<FASUM(Q)x<-D
xIFl)-EASUH(Q)x(-DIF2))>íGG(I) + (EASUl1(Q)x ac2 +FASUH(Q)s: *2 )xCC(I)GO TO 2DIF3=TAP(I) xEASUM(P)-EASUM(Q>DIF^=TAP(I)XFASUM(P)-FASUM(Q) 'DIF5=(i»/TAPCI))xEASUM(Q)-EASUH(P)DIF6=(l*/TAPÍI))xFASUM(Q)-FASUM(P)RELTRA(PíQ)=TAP(I)
xp)XDIF3)xBB(I)
XQ)XDIFS)XBB(I)PREAC(PjQ)=(EASUH(P)xDIF3+FASUM(P)xDIF4)xBB<I)+(FASUMCP)xDIF3-EASU
PREAC(QiP)=(EASUM(Q)xDIF5+FASUM(Q)xDIF6)xBB(I)+(FASUM(Q)xDIF5-EASUxH(Q)xDIF6)xGG(I)
2 CONTINUÉ
WRITE (C»350)WRITEÍMH7351)TOTPG=Oi
TOTPC=0»TOTQC^O»D0750 1=1, NODOSTOTPG=TOTPG+PGEN(I)TOTQG=TOTQG+QGEN(I)TOTPC=TOTPC+PCARGA(I)TOTQC=TOTQC+QCARGA(I)IF(CREACT(I),EQtO,)GO TQ CREACT(I)=CREACT(I)xMOOULO(I)x x2WRITE(C,^50)IfNQHE;RE(I).MODULO(I)rANG(I)rPGEN(I)íQGEN(I)jPCARGA(I)
x,QCARGA(I)fCREACT(I)GO TO 6
xQCARGA(I)ó DO 650 J=1,NODOS

371
POTanJ)=POT(IfJ)xlOO.PREAC(IíJ)=PREAC(l7J)xlOO.IF(POT( I íJ ) .EQ»0*00)GO TO 7GO TO 8
7 IF (PREACÍ I I J ) .EQ*0»00)GO'TO 6508 IFCRELTRAduJKECUO») GO TO 9
GO TO 109 WRITE(C>3) JiNOHBRE(J)íPOT(I jJ)7PREAC(IfJ)
GO TO 65010 HRITE(Ci550)JfNOMBRECJ)fPOT(IíJ) jPREAC<IiJ) jRELTRA(I>J)
650 CONTINUÉ750 CONTINUÉ
WRITE(Cr755>WRITE(C,850) TOTPGfTOTQGfTOTPCjTOTQC •
CC F O R K A T O S ~ 'C
250 FQRMATC// ?32Xr 'REPORTE DEL CALCULO DE FLUJOS DE POTENCIA PARA E*L SISTEMA EN ESTUDIO1 ,/,32X>68( '*' ),////, 'X1 i33C '-') » 'DATOS DE BARxRASSSC'-Mr'XSm'-'K'FLUJQS EN LINEAS1 , 17( '-') f 'X1 »//)
350 FORMATC35X7 'X --- -GENERACIOK --- X ----- -CARGA ------ X-CAP/REAC-X1 ilX> ' A* LA1 i//2X» 'BARRA1 >3X> 'NOMBRE1 f4X> 'VOLTS1 T3X> ' ÁNGULO1 ,5Xi 'MR1 r5X>'M*YARl >6X> '«W róXf 'HVAR' róX» 'MVAR1 ,^XF 'BARRA1 ;3Xí 'NOMBRE1 ,7X? 'MH1 í6Xatj'HVAK'fSXi'TAP'j •/)
351 FORMATC20XÍI(P,U)IÍ3XÍI(GRAD)IJ5XÍ1 l, 8X1 ' '
FORMATC3:7t2í3XIF5 FQRMATC 4XyI274XfA6>3X>F6*3í3XíF5>li2XjF7*2f2X>F7«2í2XfF7*2>2XjFx7«2Tl2Xi50('-'))3 FORMAT(
550 FORMATÍ755 FORHATC/850 FQRMATC/fSXi 'GENERACIÓN Y DEMANDA TOTAL1 »6XfF7, 2i2X>F7* 2r2X7F7*272
ííX;F7,2J/)RETURNEND
C SUBRUTINA QUE UTILIZA LA TEORÍA DE ESTIMACIÓN DE ESTADO PARA ENCONTRAR LOSC MEJORES ESTIMADOS DE LAS VARIABLES DE ESTADO EN UN S*E*P*C SE USA TAMBIÉN PARA CALCULAR LOS PARÁMETROS MEDIDOS UTILIZANDO LOS MEJORESC ESTIMADOS OBTENIDOSCC
SUBROUTINE ESTIMACNODOSiYPQMODíYPQANjEMODFDELTfEASUMTFASUHfPCALiQCxALíINDEFfERRDATFNHEDFlNDICAíTADH)DIMENSIÓN EASUM(25)íFASUM(25)TPCAL<25)fQCAL(25)fPROMED(80)DIMENSIÓN YPQAN(25;25)ÍMTIPO( 80) ;EMOD(25) i DELTAÍ25) rFTIPÓÍ 80) .ESXP( SO),STADEV( BO)rTAP( BO)rVALOR( 80)fNODOP( BOíKODOQC 80)»x JACÍ 80^9);PCALC( 80)fDP( 80)rQCALC( 80)7DQ( 80)rW( 80)rFTRAN(x^Ví SOJrRESULTC^Ví 80) f SOLVE(¿i?7¿i9) rPRIPRO(¿19T 80) >SEGPROH9» 80)ixHEJEST(1»9il)iDDELTA(25)íDDEMODC25)fYPQANGÍ25i25)iDELT-(25)íSUMERR(JK80)rRESID( 80)íVCALCC 80)íTERMC SOJ^DYC 80il)jYPQHOD(25í25>DIMENSIÓN TADMC25í25)COMPLEX TADMREAL MEJESTÍJAC7MAYOR1ÍMAYOR2INTEGER GLIBERiERROATfCfAINTEGER PPrQQiCUENTAiFTIPOiESPA=5
372C=6MM=ÓNEST=1PHI=3,111592Ó51DO 900 I=1,NQDQSDO 900 J=lrNQDÜSIF(IiEQ»J)GO TO 900 .AUXl=YPQAN(IrJ)xl80(/PHI+180*YPQANG<I>J)=AUXlxPHI/180*
900 CONTINUÉREAD(A72)NMEDrEMOD(l)íDELTA<l)IF(EMOD(1)*LE,0.) GO TO 101IF(NMED*LT«2xNQDQS-l> GO TO 100lF(NMEDtGT(80> GO TO 117DO 1 I=1>NMEDREAD(Aí3)HTIPO(I)fFTIPO{I)iESP(Í)FVALOR(iyfNODOP(I)jNODOQ(I)fSTADE
IF<MTIPO(I)»GT*5*AND*MTIPQ(IKLE*0) GO TO 101IF(FTIPO(I)*GT*2*AND*FTIPO(IKLE*0) GO TO 102IFCESP(I),GT,2*ANDtESP(IKLE(0) GO TO 103IFÍSTADEVCIKLE.O) GO TO 105IF(FTIPO<I)>EQ,2.AND*TAPa)*LE*<M GO TO 106
1 CONTINUÉWRITECCrl07) . •
107 FORHAT(42Xi 'TABLA DE VALORES HEDIDOS DEL SISTEMA PARA EVALUAR1 >/x,l2Xr51(ls:l)T/7¿l2Xf 'EL ESTADO DEL MISMO MEDIANTE EL USO DE LA TEOR*IA DEI7/7/}2Xf51(Ix1)7/^2Xí'ESTIMACION DE ESTADO* ' f/i42Xi21( 'x1 ))WRITE(Crl08)
108 FORÍ1AT(27XÍ'MEDIC, N'^X/'TIPO DE MEDICA >21Xí 'VALOR ( P » U . ) ' i3X* 'Dxt STANDARD 1 , / )
DO 350 I-líNHED . •IF(MTIPG(I),EQ,1)GO TQ 111IF(MTIPO(I)*EQ»2)GO TO 112 .IF(MTIPO(I),EQ,3)GO TQ 113IF(MTIPO(I)*EQ*4)GO TO Ii4GO TO 115
111 WRITE(Cil30')I íNODOP(I)fVALOR(I)7STAOEV(I)GO TO 850
112 WRITE(Cil31)IfNO[>OP(I)rVALOR(I)JSTADEM(I)GO TO 850
113 WRITE(Cj l32) I fNODQP(I) fNODOQ<I) iVALOR(I) fSTADEV(I)GO TO 850
111 WRITE(CJ133)IfNODDP(I)iNODOQCI)rVALOR(I)fSTADEV(I)GO TO 850
115 WRITE(C»13^)I*NODOP(I)fVALOR(I)fSTADEV<I)850 CONTINUÉ950 DO 1 I=2íNODOS
DELTACI)=0,1 CONTINUÉ
NODO=2xNODOS-lCUENTA=1
C FORMO EL J A C O B I A N O DE ACUERDO A LAS MEDICIONES REALIZADAS1000 DO 58 M=1>NMED
IF(NMED»LT,NODO)GO TO 100IF(MTIPO(M),EQ.1)GO TO 8IF(MTIPQ(MKEQ(2>GQ TO 16IF (MTIPO(M)*EQ*3)GO TO 21 •IFCMTIPO(M)tEQ,1)GO TO 31
373ÜEMOD=VALOR(M)x x2 -EMODÍNODOPÍM) >x *2DY(Híl)=DEMOD .DO 5 N=lrNGDJAC(M>N)=0.CONTINUÉIND=1DO 7 N=NODOS,NODQIF(NQDQP(M>,EQ,IND>GO TO 6
GO TO 76 JAC(M>N)=2(xABS(EMQD(NQDOP(M)))7 IND=IND+1
GO TO 588 PCALC(M)=b.
PP=NQDOP<M)DO 9 K=lfNODOSPCALC(M)=PCALC(M)+ABS(EMOD(PP)xEMOD(K)xYPQMOD(PPíK»xCOS(YPQAN (PPx,K)+DELTA(PP)-DELTA(K))9 CONTINUÉ
DP(PP)=VALOR(H)-PCALC(M)DY(Mjl)=OP(PP)IND=2DO 12 N=líNODIF(PP*EQ+IND)GQ TO 10JAC(HiN)=ABS(EMOD(PP)¿EMOD(IND)*YPQMODCPPíIND))xSIN(YPQAN (PP^IND)x+DELTA(PP)-DELTA(IND»GO TO 12
10 SUH=0.DO 11 J=li NODOSIFCPP+EQ.J) GO TQ 11SUM=SUM+ABS(EMOD(PP)XEMOD(J)xYPQííOD(PPfJ))xSIN(YPQAN (PPjJ)+DELTA(
xpp ) -DELTA (J) )11 CONTINUÉ
JAC(MTN)=-SUM12 IND=IHD+1
IND=1DO 15 N=NQDOS>NQDQIF(PP.EQ»IND)GO TO 13 'JAC(MiN)=ABS(EMOD(PP)xYPQMOD(PPiIND))xCOS(YPQAN CPPíIND)+DELTA(PP)x-DELTACIND))GO TO 15
13 SUMADO»DO 11 J=líNODOSIF(PP»EQ*J)GO TO HSUHA=SUMA+ABS(EMOD(J)JEYPQMQD(PP?J))xCOS(YPQAN (PPi J)+DELTA(PP)-DEL
X T A ( J ) )H CONTINUÉ
FACTl=2txABS(EMOD(PP)xYPQMQDCPPjPP»a:COS(YPQAN (PPfPP))
15 IND=IND+1• GO TO 58lo QCALC(M)=0»
PP=NQDOP(M)DO 17 K=líNODOSQCALC(H)=QCALC(M)+ABS(EHOD(PP)xEMOD(K)xYPQHOD(PPíK))xSINCYPQAN (PP
x,K)H-DELTA(PP)-DELTA(K))17 CONTINUÉ
DQ(PP)=VALOR(H)-QCALC(M)DY(Mrl)=DQ(PP)IND=2

374DO 20 N = l r N G DIFÍPP.EQ.INOGO 10 18JAC(M7N)=-ABS(EMOD(PP)xEHOD(IND)xYPQHOD(PP,IND))xCOS(YPQAK (PP,IND
x)+DELTA(PP)~DELTA(IND)) .GO TO 20
18 SUM=0.DO 19 J=1>NODGSIF(PP(EQ,J)GO TO 19
SUM=SUM+ABS(EMQD(PP>xEMQD(J)xYPGMQD(PPrJ))*COS(YPQAN (PP, J)+DELTA(xpP)-DELTA(J)) -
19 CONTINUÉJAC(M,N)=SUH
20 IND=INO+1IND=1DO 23 N=NODOS , NODOIF(PFSECMND)GG TO 21JACCMrM)=AE:S(EMOD(PP)xYPQMOD(PPrIND))xSIN(YPQAK (PPrIND)+DELTA(PP)
x-DELTA(IND))GO TO 23
21 SUMADO,FACT2=2(xABS(EMOD(PP)xYPQHOD(PP?PP))xSINÍYPQAN (PP^PP))DO 22 J=IFNODOSIF(PP.EQ.J)GO TO 22SUHA=SUMA+ABS(EHOD(J)xYPQMODCPPíJ))3:SIN(YPQAN (PP? J)+DELTA(PP)-DELXTA(J))
22 CONTINUÉJAC(HÍN)=SUHA+FACT2
23 IND=IND+1GO TQ 58
24 IF(FTIPü(M),NE(l)GQ TO 38PP=NODQP(M)QQ=NODOQ(H)FPD=ABS(EMÜD(PP)* «2 xYPQMOD(PPjQQ) )xCOS(YPQANG(PP,QQ) )-ABS(EMOD(F'P
x)xEMOD(QQ)xYPQMOD(PPiQQ))xCOS(YPQANG(PPfQQ)+DELTA(PP)-DELTA(QQ))DPPQ=VALOR(M)-FPCDY(M/1)=DPPQ
100 IND=200 27 N=liNODIF(PP.EQ,IND)GO TO 25IF(QQ(EQ,IND)GO TO 26JAC(M?N)=0*GO TO 27
25 JAC(MfM)=ABS(EMOD(PP)a£EMOD(QQ)xYPQMOD(PPfQQ))xSIN(YPQANG(PPíQQ)-*-DExLTA (PP) -DELTA (QQ))GO TO 27
26 JAC(MfN)=-ABS(EMOD(PP)xEMOD(QQ))itYPQMOD(PPiQQ))xSIN(YPQANG(PPiCIQ)+DxELTA(PP)-DELTACQQ))
27 IND=IND+1IF(FTIPO(M),NE*1)GO TO 271GO TO 272
271 IF(ESP(M)»NE.1)GO TO GO TO 39
272 IND=1DO 30 N^NODOSíNODOIF(PP*EQ.IND)GO TQ 28IF(QQ(EQ(IND)GO TO 29
GO TO 3028 J A C ( H r N ) = 2 . x A B S ( E M Q D ( P P ) x Y P Q H O D ( P P I Q Q ) ) x C O S ( Y P Q A N G ( P P í Q Q ) ) - A B S ( E M O
x D ( Q Q ) x Y P Q M O D ( P P í Q Q ) ) * * C O S ( Y P Q A N G ( P P r Q Q ) + D E L T A ( P P ) -DELTA Í Q Q ) )
_j

375GO TO 30
29 JAC(MiN)=-ABS(EMOD(PP)xYPQMOD(PP>QQ))xCOS(YPQANG(PPiQQ)+DELTA(PP)-xDELTACQQ))
30 IND=IND+1 'GO TO 58
31 IF(FTIPÜ(MKNE,1>GQ TO 48PP=NODOP(H)
FCK>ABS(EMQD(PP)x x2 xYPQMOD(PPfQQ))xSIN<YPQANG(PPrGQ)')~ABS(EMOD<PPx)xEMOD(QQ)xYPQMOD(PPf1QQ))xSIN(YPQANG(PPfQQ)+DELTACPP)-DELTA(QQ»+ExMQD(pP)x .x2xCABS(TADM(PP>QQ))x<- l»0 )DQPQ=VALOR(M)-FOCDY(M»1)=DQPQ
200 IND=2 - .DO 34 N^lrNODIF(PP,EQ*IND)GO TO 32I F C C H L E G . I N D J G Q TO 33JAC(MrN)=0»GO TO 34
32 JAC<HíN)=-ABÍS(EMOD(PP)xEMOD(QQ)xYPQMOD(PPiQQ»xCOS(YPQANG(PPJQQ)+DxELTA(PP)-DELTACQQ))
GO TO 34 . -
33 JAC(MfN)=ABS(EHOD<PP)xEMOD(QQ)xYPQMOD(PPfQQ))xCOS(YPQANG(PPTQQ)+DExLTA (PP) -DELTA ( Q Q ) )
34 IKD=IND+1IF(FTIPO(M)*NE*1)GO TO 173GQ TO 174
173 IFÍESP(MKNE,1)GG TO 54 .GO TQ 49
174 IND=1DO 37 N=NODOSíNOOOIF(PP*EQ.IND)GO TQ 35IF(QQtEQ»IND)GO TO 36
GO TO 3735 JAC(MfN)=2*xABS(EMODCPP)xYPQMOD(PP>QQ))acSIN(YPQANG(PPfQQ))-ABS<EMO
xD(QQ)xYPQMOD(PPfOQ))xSIN(YPQANG(PPyQQ)+DELTA(PP)-DELTA(QQ))+2*xABSx(EMODCPP)xCABS(TADM<PPjQQ)))x(-1.0)GO TO 37
36 JAC(HTN)=-ABS<EHOD(PP)xYPQMOD(PPfQQ))xSIN(YPQANG(PPfQQ)+DELTA(PP)-xDELTA(QQ))
37 IND=IND+1•GQ TQ 58
38. IF(ESP(M).NE,1)GQ TO 43PP=NODOP<H)QQ=NODQQCM)FPC=TAP(M)xABS<EMOD(PP)x x2 xYPQMOD(PP,QQ) )xCOS(YPQANG(PPiQQ) )-ABS(
xEMOD(PP)xEMQD(QQ)xYPQMOD(PPjQQ))xCOS(YPQANG(PPfQQ)+DELTA(PP) -DELTAx(QQ))DPPQ=VALOR(M)-FPCDY(M?1)=DPPQGQ TO 100
39 IND=1DO 42 N^NODOSrNODOIF(PP*EQ.IND)GO TQ 40IF(QQ,EQtIND)GG TO 41
GQ TQ 4240 JAC(MíN)=2,xTAP(M)xABS(EMOD(PP)xYPOMODCPPíQQ))xCOS(YPQANG(PPíQQ))-
xABS(EMOD(QQ)xYPQHOD(PPfQQ))xCOS(YPQANG(PPíQQ)+DELTA(PP)-DELTA(QQ))
376GO TO 42
41 JAC(HíN)— ABS(EMQD<PP)xYPQMGO(PP,aQ))xCGS(YPGANG(PP,aQ)+DElTA(PP>-xDELTACQQ))
42 IND=IND+1 •GO TO 58
43 PP=NODQP(M>QQ=NODOQ(M)FPC=(lt/TAPCH))xABS(EHOD(PP)x x2 xYPQMQD(PPfQQ) )xCOS(YPQANGÍPP,QQ) )
x-ABS(EHOD(PP)xEMaD(QQ)xYPQMODCPPíQQ))XCOSÍYPQANG(PPrQQ)+DELTA(PP)-XDELTA(QQ))DPPQ=VALOR(M)-FPCDY(Mil)=DPPQGO TO 100
44 IND=1DO 47 N=NODOSrNODQ 'IF(PP.EQ,IND)GO TO 45IF(QQ+EQ,IND)GO TQ 46
GO TO 4745 JAC(MrN)=(2*/TAP(M))xABS(EMOD(PP)xYPQMOD(PPíQQ))xCOS(YPQANG(PPjQQ)
x)-ABSÍEHOD(QQ)xYPQMOD(PP7QQ))xCOS(YPQANG(PPiQQ)+DELTA(PP)-OELTA(QQx)>.
GO TO 4746 JAC(MjN)=-ABS(EMOD(PP)xYPQMOD(PPfQQ))xCOS(YPQANG(PPfQQ)+DELTA(PP)-XDELTA(QQ))
47 IND=IND+1GO TO 58
48 IF(ESP(H),NEil)GO TO 53PP=NODOP(M)QQ=híODOQ(M)FQC=TAP(M)«ABSCEMOD(PP)x «2 xYPQMOD(PP,aQ) )xSIN(YPQANG(PP»QQ) )-ABS(
xEMOD(PP)xEMOD(QQ)xYPQMOD(PPfQQ))xSIN(YPQANG(PPiQQ)+DELTA(PP)-DELTAx(QQ))DQPQ=VALOR(M)-FQCDY(Hfl)=OQPQGO TO 200
49 IND=1DO 52 N^NQDQS, NODOIF(PP.EQ,IND)GO TO 50IF(QQ*EQ4lND)GO TO 51
50 JAC(MFN)=2iXTAP(M)xABS(EMOD(PP)xYPQHOD(PPfQQ))xSIN(YPQANG(PPíQQ))-XABS(EMOD(QQ)XYPQMOD(PPFQQ))XSIN(YPQANG(PPFQQ)+DELTA(PP)-DELTA(QQ))GO TO 52
51 JAC(MFN)=-ABS(EMODCPP)xYPQMOD(PPFQQ))xSIN(YPQANG(PP,QQ)+DELTA(PP)-XDELTA(QQ))
52 IKD=IND+1GQ TO 58
53 PP=NODOP(M). QQ=NODOQ(M)
FQOU,/TAP(M))xABS(EMOD(PP)x x2 xYPQHOD(PPrQQ))xSIN(YPQANG(PPiQQ))x-ABS(EMOD(PP)xEMOD(QQ)xYPQMODCPPFQQ))xSIN(YPQANG(PPFQQ)+DELTA(PP)-XDELTA(QQ))DQPQ=VALOR(M)-FQCDY(MF!)=DQPQGO TO 200
54 IND=1DO 57 N=NODOSrNODOIF(PP.EQ.IND)GO TO 55

377IF(GQ,ECMND)GQ TO 56JAC(MfN)=0.GO TO 57
55 JAC(MfN)=(2,/TAP(M))xABS(EMOD(PP)xYPQMOD(PpyQQ))xSIN(YPQANG(PPfQQ)x)-ABS(EMOD<QQ)xYPQMOD(PPfQQ))«SIN(YPQANG<PPFQ&)+DELTA(PP)-DELTA(QQx))GO TO 57
56 JAC(MrN)=-ABS(EMOO(PP)xYPQHOD(PPiQQ))xSIN(YPQANG(PPFQQ)+DELTA(PP)-xüELTACQQ))
57 IND=IND+158 CONTINUÉ
C1500 CONTINUÉ
C FORMACIÓN DEL VECTOR DE PESOS O PONDERACIONES < M ),DO 59 I=1,NMEDW(I)=l,/STADEV(I)x x2.
5? CONTINUÉC CALCULO LA MATRIZ TRASPUESTA DEL JACOBIANO 'FTRAN'
DO 60 I=lrNMED .DO 60 J=lrNODQ
FTRAN(JrI)=JAC(IfJ>60 CONTINUÉ .-
C MULTIPLICO LA MATRIZ FTRAN POR EL VECTOR DE PESOS HCALL MULTKNODOrNHEDrFTRAN^íRESULTA¿}9í80f80r^9í80)
C MULTIPLICO LA MATRIZ RESLJLT POR LA MATRIZ JACOBIANO JACCALL FRQDÍRESULTrJACíSOLVE, NODO rNODQrNMEDH9í 30,80 7^9,49*^970)
C INVIERTO LA MATRIZ SOLVE (MATRIZ CUADRADA)CALL INUERTÍSÜLVEíNQDÜr^^INDEF)IF(INDEF.EQ»1) GO TO 68
C MULTIPLICO LA MATRIZ SOLVE POR LA MATRIZ FTRANCALL
C MULTIPLICO LA MATRIZ PRIPRO POR EL VECTOR DE PESOS' HCALL
MULTIPLICO LA MATRIZ SEGPRO POR LA MATRIZ DYCALL
J=l
DO 61 I=ljNODDDELTA(IND)=MEJEST(IÍJ)
61 IND=IND+1
DO 62 I=NODOSrNODODDEMOD(IND)=MEJEST(IjJ)
62 IND=IND+1BUSCO LA MAYOR VARIACIÓN DE LAS VARIABLES DE ESTADO
IND-2INDI=INO-1'MAYOR1=DDELTA(IND)MAYOR2=DDEMQD(INDI)DO 63 I=2íNGDOSIF(MAYOR2(GT*DDEMOD(I))GQ TQ 300MAYOR2=DDEMOO(I)
300 IF(MAYORltGT,DDELTA(I))GQ TO 63MAYOR1=DDELTAÍI)
63 CONTINUÉIFCMAYORl.LT.O.OOODGO TQ 175GO TO 176

378175 IF(MAYÜR2,LT(0*0001)GO TO 65176 EMOD(1)=£MOD(1)+DDEMQD(Í)
00 64 1=2 1 MODOSEMOD(I)=EHOO(I)+DDEMOD(I)DELTA(I)=DELTA-(IHDDELTA<I)
04 CONTINUÉCUENTA=CUENTA+1IF(CUENTA.GTtlO)GQ TO 405GO TO 1000
400 WRITE(Cr500)INDICA=1GO TO 68
405 HRITE(CÍ406)INDICAD! 'GO TO 68
505 KRITECC^SIG)DO 67 1=1 7 NODOSPCAL(I>=0,QCAL(I)=0.DO 73 J=l, NODOSSUMHQD=EMOD(I)xEMOD(J)XYPQMOD(IjJ)SUMANG=YPQAN(IjJ)+DELTA(I)-DELTA(J)PCAL(I)=PCAL(IHABS(SUMMOD)*CGS (SUMAHG)QCAL(I)=QCAL(I)+ABS(SUMMOD)*SIN (SUMANG)
73 CONTINUÉEASUH(I)=EMOD(I)«COS(DELTA(I)>FASUM(I)=EttGDÍI)*SIN(DELTA(I»DELT(I)=DELTA(I)xl80»/PHIWRITECCi6á)IjEMOD(I)íDELT (I)"
67 CONTINUÉGO TO 208
101 HRITE(MMj201)ERRDAT=1GO TO 68
102 HRITE(MM>202)ERRDAT=1GO TO 68
103 WRITE(MMí203) •
GO TO 68104 HRITEÍHH/204)
ERROAT=1GO TO 68
105 WRITE(MM»205)ERRDAT=1GO TO 68
106 WRITE(MMf206)ERRDAT=1GO TO 68
117 HRITE(MMÍ217)- ERRDAT=1
GO TO 68208 i4RITE(Cí69) CUENTA
C TABLA DE COMPARACIÓN DE DATOS Y CALCULO DEL ERROR RELATIVO ENTRE ELC VALOR MEDIDO Y EL CALCULADO
WRITE(CíóOO)HRITECCiólO)SUMO=0,DO oso I=ITNMEDIF(VALOR(I)»EQ»0) GO TO 75
379PRüMED(I>=A6S((VALQR(I) -VCALC(I )>/VALQR(I) )x lOO.GO TO 76
75 PROMED(I)=0.76 IF(MTIPO(I),EQ*5) GO TQ 209
VALQR(I)=VALOR(I)xlOOVCALC(I)=VCALC(I)xlOOIF<MTIPQ(I)+EQ»3»QR*MTIPQ(I)*EQ*4>GQ TO 630
209 HRITE(Cf620)lFMTIPO(I)FNODOP(I)fyALOR(I),VCALC<I) íPROHED(I)GO TO 650
630 WRITECCF^OIíMTIPOCDfNODOPCDíNODOQÍDíVALORCDyVCALCdJfPROMEDÍXI)
650 CONTINUÉGO TO 68
65 ERRGR=0»DO 70 I=lTNMEDIF(MTIPQ(I)*EQ,5)GQ TO 71 " '
72 VCALC(I)=VALOR(I)-DY(Iíl)TERM(I)=(DY(I>l)x x2 )xW(I)ERRQR=ERRQR+TERM(I)SUMERR(I)=ERRQRGO TO 70
71 DY(lTl):=DY(Ifl)/(VALQR(I)-fEMQD(NQDap(I)))GO TQ 72
70 CONTINUÉFERROR=SUMERR<NMED)xlOx »4WRITE(Cr74) NESTiFERRORGLIBER=NMED~NODQTJ=0»CALL CHKTJiGLIBER)IF<FERROR.LE»TJ)GO TO 505NEST=NEST+1CALL IDEHKWyJACíPRIPROjHMEOíNODOSTDYfRESIDfNODOiVALORfMTIPQfFTIPO
IF(INDICA*EQ+1) GO TO 68GO TO 950
CC F O R M A T O SC -
2 FORMAT(I2r2(F7*3))3 FORMATO (II) f F H * 7 » 2(12) jF7^íF6*l )
500 FORMAT(/ / / r lOXi 'NO SE PUEDE APLICAR LA TEORÍA DE ESTIMACIÓN POR NOx HABER SUFICIENTE REDUNDANCIA EN LAS MEDICIONES1 rA 10X;97( • * ' ) ,//) .
^06 FQRMAT( / / / í lOX í 'LA ESTIMACIÓN NO CONVERGE í SE EXCEDE EL NUMERO DEx ITERACIONES EN LA CONVERGENCIA1!/)
510 F O R H A T O C / J j S O X í ' M E J O R E S E S T I M A D O S1 r / í50Xí32( ' x 1 )/)66 FORMAT( ^SXr 'BARRA1 íI2> 10X> ' E =' íFÓ.SreXí 'DELTA =!TF5(1)
201 F O R M A T ( 1 l l í 2 0 X ? l ERROR EN DATOÍ VALOR DEL TIPO DE MEDICIÓN ESTA ERR
202 FGRMAT('l'r20X7lERRQR EN DATOÍ VALOR DE L TIPO DE FLUJO NO ESTA BIxEN ' )
203 FQRMATC i1 f20X> 'ERROR EN DATOÍ EL VALOR DE ESP ES SOLO 102')201 FQRMAT('llí20Xí 'ERROR EN DATQí MODULO DEL VOLTAJE EN BARRA SLACK E
xs IGUAL A O 1)205 FORMAT('l'í20Xi 'ERROR EH DATOÍ EL VALOR DE LA DESVIACIÓN STANDARD
XDE ALGUNA MEDICIÓN ES IGUAL A O1)206 FORMATC1S20X. 'ERROR EN DATOÍ EL TAP DE ALGUNA MEDICIÓN DE FLUJO
XA TRAVÉS DE TRANF, ES =0')217 FORMATC11 >20X TERROR EN DATOÍ VALOR DEL NUMERO DE MEDICIONES SE E
xXCEDE DEL LIMITE (NMED>80)¡)130 FORMAT(30XII3í5Xf 'POTENCIA ACTIVA EN LA BARRA 'i 13» IX» F19.4f9XíF5.2

380x)
131 FQRMAT<30X7l3,5Xr 'POTEN» REACTIVA EN LA BARRA1 ,I37lX,F19t4,9X,F5,2x>
132 FORMAT(30X7l3,5X> 'FLUJO DE POTENCIA ACTIVA EN1 ,13, 1X> '-M37F15.4,X9X7F5.2)
133 FORMAT(30XfI3í5Xi 'FLUJO DE POTEN. REACTIVA EN1 ,13,1X> '-M3,F15.4Tx9XrF5.2>
134 FQRMAT(30X7l3,5X, 'VOLTAJE EN LA BARRA ........ ' ,13, 1X,F19.4,9X,F5.2*)
69 FQRMAT(///,10X, 'ITERACIÓN NUM, ' rI2,//)600 FORMATC11 >4QXr 'TABLA DE COMPARACIÓN DE DATOS Y CALCULO DEL ERROR
*1,/741X749('xl),/,2ÓX,lSOLa LAS MEDICIONES DE VOLTAJE (5) ESTÁN ENx (p,U) LAS RESTANTES EN VALORES REALES',//)
610 FORMAT(22XI1MED/ N',4Xr'MED, TIPO1 ,4X7 ' NODO F"HX,'NODO Cr>4X,'VALxQR MEDIDO 'f-ÍXr 'VALOR CALCULADO1 ,5X7 ' ERROR (X) ' )
620 FORMAT( 23X/I2, 10X,I2,10X,I2r 17X,F 9,4,9 XíF9»4t8XjF7»
640 FQRMATí 23XJI2,10XJI2,10X,I2,8X,I2,7X,F 9»4,9 X7F9.4í 8X7F7,*F104¿Í7HXTE10»4)
74 FORMATC4C/)Í25X,ILA FUNCIÓN DE ERROR EN LA ESTIMACIÓN N1 ,13, 2X> 'ES
68 RETURNEND
C SUBRUTINA PARA MULTIPLICAR UNA MATRIZ POR UN VECTORSUBROUTINE MULTKN,NM7AA37H,RESULT,NA77NA8rNA9,NAlQ,NAll)DIMENSIÓN AA3(NA77NA8)7HCHA9)JRESULT(NA10,NA11)DO 1 1=1, NDO 1 J=1,NMAA=A'A3(IiJ)
RESULT(I»J)=AAXWW1 CONTINUÉ
RETURNEND
C SUBRUTINA PARA CALCULAR EL PRODUCTO DE DOS MATRICESSUBROUTINE PROD(RESP,JAC,SOLVE,N7NM7NM1,NA12,NA13,NAÍ4,NA15,NA16,NA17)
xA17r INDIODIMENSIÓN RESP(NA12,NA13),JAC(NAÍ4,NA15),SOLVE(NA16,NA17)REAL JACIF(INDIC,NE*1> GO TO 3DO 2 1=1 iNDO 2 J=lfNHIF(I»NE»J)GQ TO 2SOLVE(I,1)=0,DO 5 11=1 iHHlSOLVE(lFl)=SOLVE(Iil)+RESP(IfII)atJACCHiJ)
5 CONTINUÉ2 CONTINUÉ
GO TO 43 DO 1 1=1 fN
DO 1 J=1,NMSOLVE(I,J)=0.DO 1 11=1 íNHlSOLVE(I,J)=SOLVE(I,J)+RESP(IfII)xJAC(II»J)
1 CONTINUÉ4 RETURN
END
381
C SU6RUTINA PARA OBTENER EL VALOR DE LA DISTRIBUCIÓN CHI-CUADRAOO PARAC EL NIVEL DE SIGNIFICANCIA (ALFA=0*01) Y K GRADOS DE LIBERTAD
SUBROUTINE CHI(TJ>K)DIMENSIÓN SGCHK45)DATA SQCHI 76.6379.21r11.3>13.3715.1>16.3718,5720,1,21.
x7i23.2í2Wr26*2r27«7*29af30.6i32»Oi33.4F34»8r3ó.2i37.6r38,9i40*3x741,0743,0 744,3745,oí 47,0748*3749*0750,89752*19753,48,54,77 * 56.007*57,34758,62,59,89761.16762,42763*69764,95766,20767,45768,71769,957TJ^SQCHKK)RETURN 'END
C SUBRUTINA QUE IDENTIFICA MEDICIÓN ERRADA Y LA ELIMINA*SUBROUTINE IDENT(U > JAC,PRIPRO 7 NMED 7 NODOS 7 DY r RESID 7 NODO 7 VALOR 7 MTIPO
X7FTIPOrESP7NODOP7NODOQrTAP7STADEV7lNDICA)DIMENSIÓN W( 80)7JAC( 80749)7PRIPRQ(49780 )7DY(80,1)7RESIDÍ 80)rVA
*LOR( 80)7MTIPQ( 80)jFTIPO( 80)íESP( 80)7NODOP( 80)?NODOQ( 80)7TAP(x 80)íSTADEVC 80)rPRODUCCSO 7 1 )íCOVAR(80 7 1 )7VARIANC-80)REAL JACINTEGER FTIPQrESP»CC=6
C FORMO EL VECTOR VARIANZADO 1 1=17NMED
1 VARIAN(I)=1,/W(I) .C CALCULO LA MATRIZ COVARIANZA
CALL PRODCJACiPRIPROíPRODUCfNMEDíNHEDfNODOiSOf^i^íBOíSOflil)DO 2 1=17NMEDCOVAR(l7l)=VARIANCI)-PRODUC(l7l)IF(COVAR(l7l),EQ*0*) GO TO 19GO TO 2
1? INDICA=1WRITE(C7ló) IGO TO 17
2 CONTINUÉC -CALCULO LOS RESIDUOS NORMALIZADOS DE TODAS LAS MEDICIONES
DO 3 I=lrNMEDRESID<I)=DY(Irl)x s:2/COVAR(l7l)
3 CONTINUÉC BUSCAMOS EL MAYOR RESIDUO NORMALIZADO
BIG=RESID(1)INDIC=1DO 4 L=27NMEDIF(BIG,GT,RESID(L))GO TO 4INOIC^LBIG=RESID(L)
4 CONTINUÉC UNA VEZ ENCONTRADO EL MAYOR RESIDUO NORMALIZADO PROCEDEMOS A ELIMINARC LA MEDICIÓN CORRESPONDIENTE A ESE VALOR
AUXIL=VALOR(NMED)LAA^MTIPO(NMED)LA=FTIPO(NMED)LB=ESP(NMED)
' LC=MODOPÍHMED)LD=NODOQCNMED)AL=STADEV(NMED)TRA=TAP(NMED)VALOR(NMED)=VALOR(INDIC)MTIPO(NMED)=MTIPO(INDIC)FTIPO(NMED)=FTIPO(INDIC)ESP(NMED)=ESP(INDIC)

382NQDQP(NMED)=NODGP(INDIC)NODOQ(NMEO)=NODOQ(INDIC)STADEV(NMED)=STADEVCINDIC)TAP(NMED)=TAP(INDIC)VALQR(INDIC)=AUXILMTIPO(INDIC)=LAA . . .FTIPO (INDICÓLAESP(INDIC)=LBNQDQPCINDICXCNODOQ(INDIC)=LDSTADEV(INDIC)=ALTAP(INDIC)=TRAWRITE(Ci5)INDIC-IF(MTIPÜ(NMEDKEQt2.)GO TO 7IF(MTIPOCNMED),EQ,3)GO TQ 9IFCMTIPQ(NMED),EGM)GO TO 11IFCMTIPQCNMEDKEQ*5)GQ TO 13WRITE(Cró)NODOP(NMED),VALQR(NHED)GO TO Í5
7 WRITECCi8)NODQPCNMED)»VALORCNMED>GO TO 15
9 MRITE(CíIO)NODOP(NMED)iNODOQ(N«ED)fVALOR(NMED)GO TO 15
11 WRITE(Cjl2)NODOP(NMED)íNODOQ(NMED)íVALOR(NMED)GO TO 15
CC F O R M A T O SC ' • .
5 FORMATC/ jZBXí1— LA MEDICIÓN Ñ M2r ' HA SIDO DESMECHADA POR 'NO PXASAR' LA PRUEBA CHI-CUADRADO1 í/rZSXr 'DE DETECCIÓN E IDENTIFICACIÓNxDE MEDICIONES ERRÓNEAS»1)
6 FORMATC/ jZBXí1 * CORRESPONDE Aí POTENCIA ACTIVA EN LA BAXRRA M2»1 Y SU VALOR ES =',E11^)
8 FORMATC/ *28X> l x CORRESPONDE Aí POTENCIA REACTIVA EN LA«BARRA M2r' Y SU VALOR ES =1iEll*^> -
10 FORMAT(/ íZSXí1 x CORRESPONDE At FLUJO DE POTENCIA ACTIVAxEN LA LINEA ' iI2i '-' i!2i ' Y SU VALOR ES =lyElia)
12 FORMATC/ 128X7' x CORRESPONDE At FLUJO DE POTENCIA REACTI*VA EN LA LINEA ' »I2i f-' rI27 ' Y SU VALOR ES ='iE11.4)H FORMATC/ r28Xf' x CORRESPONDE Aí VOLTAJE EN LA BARRA M2x,1 Y SU VALOR ES =SE11^)
16 FORMATC /// ,5ÓXT20C 'x1 ) ,//,30Xt 'LA VARIANZA DEL ERROR CORRESPOXNDIENTE A LA MEDICIÓN NUMERO1 rlSr1 ES CERO* ' f/>30Xf 'ESTO INDICA Q
ES IMPOSIBLE FILTRAR ERRORES CON UN NUMERO MÍNIMO DE MEDICIONESSE RECOMIENDA1 r/>30X> 'DAR MAYOR REDUNDANCIA A LAS MEDICIONES1 f//
13 WRITECCrH)NODOPCNMED)rVALORCKMED)15 NMED=NMED-117 RETURN
END
C '
C

383C ESCUELA POLITÉCNICA NACIONALC EACULTAD DE INGENIERÍA ELÉCTRICAC DEPARTAMENTO DE POTENCIAC TESIS DE GRADOc TEMA; INTRODUCCIÓN A LA ESTIMACIÓN DE ESTADO EN LA 'OPERACIÓN DE SISTEMASC ELÉCTRICOS DE POTENCIA.C •CC " - '' -C REALIZADO POR í JOSÉ RUBÉN CEDENO ROMERO.C DIRIGIDO POR í ING* GABRIEL ARGUELLO RÍOS.CC OBJETIVO DE ESTE PROGRAMA;C CALCULAR LOS PARÁMETROS DE LA ECUACIÓN DE COSTO DE GENERACIÓNC DE LAS UNIDADES TÉRMICAS UTILIZANDO LA TEORÍA DE ESTIMACIÓNC DE ESTADO.CCC .
C ' .C PR. Q G R A M A P R I N C I P A L/•». „ ______ •__ __
CC DIMENSIONO LAS VARIABLES A UTILIZAR;C
DIMENSIÓN CQNSUMCSOtl ) rPQTÍSQ, 1) > A ( 5 0 > 4 > > A T R A N S C 4 ,50)7xCHrSO^DHj^jMATINVH^íEHiSQ^FH f50) >MEJESTH ,1>*xLT(1)íCONSC(50fl)íW(50)fRESIDK50)iRESID2(50)íRESIDT(50)»XRESNQR(50)7COVAR(50>1 ) iXH) iAEC50f l )
COMMQN PQTREAL MATINVrMEJESTiNUMERINTEGER YíZY=52=6 ' •READ(Yí30) K>N
C LEO LOS VALORES DE CONSUMO DE COMBUSTIBLE j POTENCIA GENERADA Y PESO,WRITE(Zí28)
DO 1 1=1 íNREAD(Yí31) CONSUM(IfÍ)fPOT(I»l)íW(DWRITE(2f27) CONSUMCIjDfPOTdfD
1 CONTINUÉCC FORMO LA MATRIZ DE COEFICIENTES . 'A
21 IF(K«EQ.4> GO TO 15DO ^ 1=1 jNDO 1 J-líKIFCJ.EQ.2) GO TO 5!F(J«EQ.3> GQ TO 6AA=POT(Iil)ACIíJ)=AAx «2GO TO
5 A(I»J)=POT(Ifl)GO TO 4
6 A(IfJ)=l»4 CONTINUÉ
GO TO 2015 DO 16 1=1, N
DO 16 J=lfK

384IF(J*EQ.2) GO TO 17IF(J*EQ.3) GO TO 18IFU.EGM) GO TO 19AAl=POT(Iil)A(IrJ)=AAlx *3 ' - .GO TO 16 ' ' •
17 AA2=POT(Ifl)A(IíJ)=AA2* *2 .GO TO 16 '
. 18 A(IfJ)=POT(Ifl)GO TO 16
19 A(IfJ)=l.16 CONTINUÉ
CC CALCULO LA MATRIZ TRANSPUESTA DE (A)
20 DQ 7 1=1,NDO 7 J=lfKATRANS(JfI)=A(I,J)
7 CONTINUÉCC MULTIPLICO LA MATRIZ TRANSPUESTA DE (A) POR EL VECTOR DE PESOS (W)
CALL MULT(KíN>ATRANSfW>Cj4>50i50f4f5Q)C MULTIPLICO LA MATRIZ CC) POR (A)
L=NNN-KCALL PRODUC(KfL>NN*NFCfAiD>4i50f5<M>4f4fO)
C INVIERTO LA MATRIZ CUADRADA (D)CALL INVERT(DrK>LT)DO 3 I=1?K
- DO 8 J=1>KMATINV(IrJ)=D(I;J)
8 CONTINUÉL=KNN=N
C MULTIPLICO LA MATRIZ INVERSA CMATINV) POR LA MATRIZ TRANSPUESTA DE (A)CALL PRODUC(KTLtNNTNíMATINVíATRANSrE7¿l^j¿lí50íííí5070) •
C MULTIPLICO LA MATRIZ RESULTANTE (E) POR EL VECTOR DE PESOS (U)CALL MULT<KjNrEfWfFi4y5<h50r4f50>L=NNN=1
C MULTIPLICO LA MATRIZ RESULTANTE (F) POR EL VECTOR DE CONSUMO DE COMB.CALL PRODUCCKjLfNNfNiFíCONSUMFMEJEST^fSOySOílHílfO)J=lDO 9 1=1;KX(I)=MEJEST<IfJ)
9 CONTINUÉCALL CQNCAL(XiNjCONSCfK)SUMA=0»CALL RESIDÍNrCONSUM^CONSC,RESIDÍrRESIDZíRESIDTíSUMA)CALL COSMEDCNíCONSUMíCONMED)YMEDIO-CONMEDCALL SUMATOÍNíCONSUMrYMEDIOfVARTOT)DENQh=VARTOTCALL SUMATOtNíCONSCfYMEDIOíVAREXP)NUMER=VAREXP '
C CALCULO DEL COEFICIENTE DE CORRELACIÓN (CORREDDETERM=NUMER/DENOMCORREL=SQRT(DETERM)VARNEX=U.-DETERH)xlOO
C PRUEBA DE CONVERGENCIA UTILIZANDO LA TEORÍA DE LA CORRELACIÓN

385IFCVARNEX.LE. 0,030) GO TO 25
C BUSCO EL RESIDUO NORMALIZADO HAS GRANDEC
K1=NNN=NL =KCALL PRÜDUC(KlíLfNNfN>AfEFAEf50i4í4j50F50>l>l)
C CALCULO DE LOS ELEMENTOS DIAGONALES DE LA MATRIZ DE CQVARIANZASDO 20 1=1 jNJ=lCQVARdfJ)=l»/Wd)-AEdFJ>
C NORMALIZO LOS RESIDUOSRESNORd)=RESIDld)/CQVARd>J)
26 CONTINUÉC BUSCO EL DATO QUE CONTIENE A LA MEDICIÓN CON MAYOR ERROR
BIG=RESNORU) - ' •DO 22 1=2 ?NIFCBIG*GT*RESNORd)) GO TO 22BIG=RESNOR(I)MEDNUM^I
22 CONTINUÉC ELIMINO A LA MEDICIÓN CON ERROR
IF(MEDNUM*NEti) GO TO 23-MEDNUM-1
23 POTE=PQT(N>I)CQNS=CONSUM(Nfl>CONSU=CONSUM(MEDNUM»1) • .POTEN=POT(MEDNUMil>WDES=W<N)
W(MEDNUM)=WDESPOT(Níl)=POTENPOT<MEDKUM7l)=POTECONSUM(Níl)=CONSUCONSUMÍ MEDNUM j 1)=CQNS
DISMINUYO EN UNO EL NUMERO DE MEDICIONESN=N-1
DESMECHADA LA MEDICIÓN ERRÓNEA SE VUELVE CON EL PROCESO DE ESTIMACIÓNIFCN*LE»K) GQ TO 999GO TO 24
5 WRITE(Zi34)WRITE(Z>35)
DO 80 1=1 iKHRITE(ZT37) (D(IrJ)iJ=liK)
80 CONTINUÉWRITECZf38)DO 70 1=1 »KWRITE(Z»39)
70 CONTINUÉ
DO 10 1=1 iKWRITECZ^l) IrX(I)
10 CONTINUÉ
WRITE(Zi43)DO 12 11=1 ,NWRITECZi44)XRESIDT(II)
12 CONTINUÉ
386CCC F O R M A T O S 'CC . •
28 F O R M A T ( i r > / / r 4 1 X í 5 0 ( ' x l ) I / , 4 1 X r ( ' x l ) , 5 X r l T E S I S DE GRADO 1 ,29X> ( ' x 1
x ) í / r 4 1 X r ( ' x t ) r 4 8 X ; ( l x ' ) F / r 4 1 X r ( ' x ' ) r 5 X f 1 T E M A I INTRODUCCIÓN A LA«ESTIMACIÓN DE 'F lXFCx 'h / í í lXFCx ' jFSXF 'ESTADQ EN SISTEMAS ELECTRIXCOS DE P O T E N - 1 T 4 X r ( p x ' ) í / r 4 l X > ( ' x ' ) , 5 X i ' C Í A .x l r 4 X r ( l x l ) , / T 4 1 X í í l x l ) , 5 X í ' R E A L I Z A D A POR1 JOSÉ RUBÉN
- xCEDENQ ROMEROS4Xrí lx l ) r / r4 lX; ( 1x ' ) ,5X>'DIRIGIDA POR ÍING. GABRIELx ARGUELLO R ÍOS ' ,3X>( ' x 1 ) , / , 41X í ( ' x 1 ) , 5X> l
x • I F 5 X F < 1 x ' ) f / H l X í ( I x ' ) J 5 X F l G B J E T I V O : CALCULAR LOS PARxAMETROS A í B í C ' H X í í ' x ' ^ / ^ l X r C x ' ^ X j ' D E LA CURVA DE COSTO DE«GENERACIÓN DE1 »4X> (''x1),/,41X; ( ' x 1 ) ,5X>' LAS UNIDADES TÉRMICAS*x l F 4 X > ( I x ' ) F / F 4 1 X F 5 0 ( l x 1 ) )
29 FORMAT( ' r i / / / i 32XF 'VALORES MEDIDOS DE CONSUMO DE COMBUSTIBLE Y POxTENCIA DE GENERACIÓN1F/F32Xió6C'=')7/ fA4QX7'CONSUMO1rlOX»'POTENCI
' x A M O X f 'FACTOR DE PESO1 í / r 40X> 'LTS/MINMOXr' KW ')27 FORMATÍ/ 140X^7,2» 10X>F8«lF 15XíF4»l)30 FORMAT(2I2)
32 FQRMAT('lIJ3(/)í53Xf'MATRIZ DE COEFICIENTES (A)'>/í53X>2ó('-'))33 FQRMAT(/í21Xí3(E20,4flOX))34 FQRMAT(///i56Xr'VECTOR DE PESOS (W)' i/fSÓXjm'-'))
36 FORMATC1S///T52X?1 MATRIZ PRODUCTO DE (A)T.H»<A)' Í52X>29(1-1))37 FQRMAT(///J21Xí3(E20,4!lOX))38 FORHAT(///r53Xí'MATRIZ INVERSA'DE UA)T,VMA» ' »/F53X>2ó('-')).39 FORMATÍ///j21Xr3(E20+^flOX))40 FQRMAT(///>37XrlLQS PARÁMETROS DE LA ECUACIÓN DE COSTO DE COMBUSxTIBLE SON 'r/íS/XíS/C-'ÍF//)
41 FORMAT(///F20XF'EL VALOR DE XMlF1 ES ='íF10t37//)42 FORMAT(///r73Xr'2lI/í41Xí'LA ECUACIÓN ES 1 C(PG) = XI x PG + X2 xx PG + X3S/í41XT49C'-l)f///)
43 FQRMAT(///í90Xr12MlXrI2lí/T23Xí'MEDICIÓN £ VALOR MEDIDO VxALQR CALCULADO RESIDUO RESIDUO RESIDUO TOTALS//)
999 CALL EXITEND
CCCC SUBRUTINA PARA MULTIPLICAR MATRICES —C
SUBRQUTINEDIMENSIÓN A(Ml iM2)íB(M3rM4) iC(H5íM6)IF(INDICO»EG.l) GO TO 2DO 1 1=1 f KDO 1 J=lrNNC(IrJ)=0.DO 1 M«=lfL
CONTINUÉGO TO 6DO 5 11=1 iKDO 4 JJ=1»NNIF(II*NE*JJ) GO TO 4C(IlFl>=0»
387DO 3 KK=ífLCdIri)^CdIfl)+AdIrKK>xB(KKrJJ)
3 CONTINUÉí CONTINUÉ -5 CONTINUÉ6 RETURN
ENDCC SUBRUTINA PARA INVERTIR MATRICES ==================C
SUBROUTINE INVERT(ATNrLT)DIMENSIÓN A(4f4)jl_T(4)INTEGER ZL=NZ=óDO 2 J=1,L
2 LT(J)=0Tl=0,DO 10 M=liLDO 1 LL=lrl_IFCLTCLLKEQ.l) GO TO 4IF(A(LULU-TltLEvO() GO TO 4Tl-A(LLíLL)K=LL
^ CONTINUÉIFCU.EQ.O,) GO TO HTl=0>LT(K)=1DO 8 I=liLIF(I-.EQ*K> GO TO 8DO 6 J^líLIF(J»EQ*K) GQ TO 6 . -
ó CONTINUÉ8 CONTINUÉ
A(KfK)=- l» /A(K iK)DO 10 1=1, LIF(I,EQ,K) GO TO 10
A(KiI)=A(KiI)xA(KfK)10 CONTINUÉ
DO 12 J=liLDO 12 K=liL
12 A(JrK>=-A(J>K)RETURN
1 WRITE(Ziló)RETURN
16 FQRMAT(////T5ÓX> 'INVERSA NO DEFINIDAS//)END
CC .C SUBRUTINA PARA CALCULAR LOS VALORES DE CONSUMO DE COMBUSTIBLE A PARTIRC DE LOS PARÁMETROS DE LA ECUACIÓN CALCULADOSC
SUBROUTINE CONCALCX» Nf CONSCjK)DIMENSIÓN X(1)rPOT(50»l)rCQNSC(50fl)COMMON POTDO 10 KK=liNCQNSC(KKrl)=0*
EQ^) GO TO 5
DO 101 JJ=liKIF(JJ.EQ.l) GO TO 1IF(JJtEQ*2) GO TO 2IF(JJ*EQ»3) GO TO 3
1 POTl=POT(KKil)A1=X(JJ)FRGDl=AlxPOTlx x2GO TO ^ -
2 POT2-POT(KK»1)A2=X(JJ)'PRQDl=A2xPOT2GO TO 4
3 A3=X(JJ)PROD1-A3
4 COKSC(KKíl)=CONSC(KKíl)+PRODl101 CONTINUÉ -
GO TO 105 DO 100 IJ=1,K
IFtIJ»EQ*2) GO TO 6IF('IJ*EQ*3) GO TO 7IF(IJ»EQ+4) GO TO 8POTl=POT(KKil)A1=X(IJ)PROD2=AlxpQTl* »3 . .GO TO 9
ó POT2=POTCKKfl)A2=X(IJ)
GO TQ 9POT3=POT(KKfl)A3=X(IJ)PROD2-A3XPOT3GO TO 9
9 CONSC C KK r 1 ) =CONSC ( KK í 1 ) +PROD2100 CONTINUÉ10 CONTINUÉ
RETURNEND
CCC SUBRUTINA P-ARA MULTIPLICAR UNA MATRIZ POR EL VECTOR DE PESOSC
SUBROUTINE MULT(KfNjGiW>CFM8*M9jM1DIMENSIÓN GCHBrM9)íWCM10)íC(MllTM12)DO 11 1=1 >KDO 11 J=liNGG=G(IiJ)WW=W(J)
11 CONTINUÉRETURNEND
CCC SUBRUTINA PARA CALCULAR LOS RESIDUOS ============:========C
SUBROUTINE RESIDCNfCONSUMrQaNSCí RESIDÍ rRESID2rRESIDTiSUMA)DIMENSIÓN CONSUM(50íl)rCONSC(50rl)íRESIDK50)iRESID2(50)í

XRESIDK50) . . 3 9
DO 22 I K = l f NCONS=CONSUM(IKfl)CONC=CONSC(IK»1)RESIDÍ(IK)=ABS(CONS-CGNC)RES1=RÉSID1(IK>RESID2(IK)=RESlx xzRES2=R£SID2(IK)SUMA=SUMA+RES2
. RESIDT(IK)=SUMA22 CONTINUÉ
RETURN 'END
CC.C SUBRUTINA PARA CALCULAR EL VALOR MEDIO DE CONSUMO DE COMBUSTIBLECC
SUBROUTINE CQSMEDÍNíCQNSUMiCONMED)DIMENSIÓN CONSUMÍ50,1)SUMATQ^O, ' ' .DO 1 1=1,NSUMATO=SUMATO+CÓNSUM<Ifl)
1 CONTINUÉCONMED=SUMATO/NRETURNEND .
CCC SUBRUTINA PARA CALCULAR EL VALOR DE UN SUMATORIOCC
SUBROUTINE SUMATCKNjAfBíSUMAl)DIMENSIÓN A(50,l)SUMA1=0, . 'DO 1 I=irNAA=A(Iil)BB=AA-BBBB=BBx 2SUMA1=SUMA1+BBB
1 CONTINUÉRETURNEND

REFERENCIAS
01. ARGUELLO, Gabriel, Operación de Sistemas Eléctricos de Poten-
cia, TEMA No.5, pp. 1-20
02. SCHWEPPE, FREO C., J. WILDES, ROM DOUGLAS B, "Power System S~
tatic-State Estlmatlon, Parts I, II IEEE Pas 89, No.l, 1970 -.:
pp 120-130.
03. SCHWEPPE-F.C., Power System Static-State Estlmatlon, Part III,
Trans on Pas Vol-Pas 89, 'No.l, January 1970."
04. DOPAZO, J.F., EHRMANN S. T.s SASSON A.M. and VAN SLYCK.
The AEP State Estimation Monltorlng and Securlty System, AEP -.
Service Corporation,
05. WOOD 0. ALLEN AND WOLLENBERG B., Power Generatlon Operatlon and
Control p.p 391-439.
06. STAGG, GLENN W, DOPAZO J.F., KLITIM O.A., VANSLICK L.S., Tech-
ñiques for the Real-Time Monltorlng of Power System Qperatlons,
IEEE Trans. on PAS, Vol.89 No.4, 1970, p.p. 545-555
07. Afro^es F. and Cory B.O., Identification of measurement, Parame
ter and Conflguratlon Errors .In"$^a£:ic''5táte:"EstimatTon_> Impe-
rial College, London SW7.
08. DOPAZO O.F., KLITIN O.A. and SASSON. A.M., State Estimation For
Power Systems: Detect and Identification of Gross Measurement
Errors.

09. ASCHMONEIT F.C., PETERSON N.M. and ADRIÁN E.C., State Estíma-
te on with Equallty Constralnts. • !
10. - FETZER E.E. and ANDERSON P.M., ObservatJility In The State Es-
timatlon Qf Power Systems, IEEE. Trans.; on P.A.S. PAS-94 No.6¡
1975, pp. 1981-1988 !
11. JOHNSSON S.L., An Algorlthm for State Estlmatlon In Power Sys
tems.
12. SASSON A.M., EHRMANN S.T., LYNCH-; P. and VANSLICK L.S., Auto-i
matlc Power System Network Topology Determlnatlon, AEP Servi-
ce Co, N.Y. pp. 610-617. ¡
13. SULLIVAN, R.L., Power System PTannlngJ McGraw-HIll, Inc. 1977.
14. ARGUELLO 6.,'Operación"dé'SIstemas Eléctricos de Potencia, Te-
ma No.9. p.p. 8-13.
15. TOYODA J. and CHEN MG-SHING, A New approach to unlt conmltment
Study and Conceptlon'ófan egulvalent ¡Genérátor p.p 5-19 5-29
16. GUIJARRO RAÚL, Flujos Estocástlcos, Tesis E.P.N. Quito 1984.
17. WARD J.B. and HALE H.VL, Digital Computer Solutlon of Tower-
Flow problems, AIEE, Oune, 56, pp 398-404.
18. SPIEGEL M.R.j Teoría y Problemas de Estadística, McGraw-HIll
1961. :

19. MEYER, P.L., Probabilidad y. Api Icaclones Estadísticas, Fondo
Educativo Interamericano. I
20.' ELGERD O.J., Eléctrica! Energy Systems Theory.