escuela de matem atica 1era. escuela de matem atica...
TRANSCRIPT

Escuela de Matematica1era. Escuela de Matematica Pura y Aplicada
Guatemala 2012.•
Curso 1Introduccion a Cadenas de Markov1
Antonio Murillo SalasDepartamento de Matematicas
Universidad de Guanajuato.
Del 19 al 24 de noviembre de 2012.
1Version preliminar.

Indice general
1. Cadenas de Markov 31.1. Definicion y propiedades basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. Clasificacion de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3. Algunos modelos importantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4. Analisis de un paso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2. Caminatas aleatorias simples 142.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2. Propiedades de las caminatas aleatorias simples . . . . . . . . . . . . . . . . . . . . 162.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. Procesos de Galton-Watson 263.1. Funciones generadoras de probabilidades . . . . . . . . . . . . . . . . . . . . . . . . 263.2. Una breve introduccion a procesos de Galton-Watson . . . . . . . . . . . . . . . . . 303.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1

Introduccion
2

Capıtulo 1
Cadenas de Markov
1.1. Definicion y propiedades basicas
Definicion 1.1.1 Un proceso estocastico es una coleccion de variables aleatorias, Xt; t ∈ T,definidas sobre un mismo espacio de probabilidad (Ω,F,P), donde T es un conjunto de indices.
Para propositos del presente curso, T = Z+ := 0, 1, 2, · · · y las variables aleatorias Xt, t ∈ T ,toman valores en algun conjunto E (finito o numerable).
Definicion 1.1.2 La sucesion Xn;n ≥ 0 es llamada cadena de Markov si para todo n ≥ 1 ycualquier coleccion x0, x1, · · · , xn ∈ E se cumple
P(Xn = xn|X0 = x0, X1 = x1, · · · , Xn−1 = xn−1), (1.1)
siempre que P(X0 = x0, X1 = x1, · · · , Xn−1 = xn−1) > 0.
Observaciones:
(i) La identidad (1.1) es llamada propiedad de Markov.
(ii) La distribucion de X0, π0(x) := P(X0 = x) (x ∈ E), es llamada distribucion inicial de lacadena.
(iii) La familia P(Xn = y|Xn−1 = x);n ∈ N, x, y ∈ E es conocida como familia de probabili-dades de transicion de la cadena.
(iv) Si P(Xn = y|Xn−1 = x) no depende de n, se dice que la cadena es homogenea con respectoal tiempo. En tal caso, se escribe
pxy ≡ P(Xn = y|Xn−1 = x), (1.2)
px,y es la probabilidad de pasar del punto x al punto y en un paso.
Por otro lado, en el caso de que la cadena sea homogenea, para cada m ≥ 1 se define
p(m)xy := P(Xn+m = y|Xn = y), (1.3)
donde p(m)x,y denota la probabilidad de pasar de x a y en m pasos. En el presente curso
solo estudiaremos cadenas de Markov homogeneas.
3

(v) Para cada x, y ∈ E, se define
p(0)xy = δxy =
1, si x = y,
0, en otro caso.
(vi) En el caso de que la cadena sea homogenea, (pxy;x, y ∈ E) es llamada matriz de transicionde la cadena. Notemos que, la suma por renglones de los elementos de la matriz de transiciones 1. Mas precisamente, ∑
y∈E
pxy = 1, para todo x ∈ E.
En efecto, sabemos que
1 = P(Ω) = P(X1 ∈ E|X0 = x)
= P(∪y∈EX1 = y|X0 = x)
=∑y∈E
P(X1 = y|X0 = x)
=∑y∈E
pxy.
La siguiente proposicion nos dice como determinar la distribucion de una cadena de Markovapartir de su distribucion inicial y sus probabilidades de transicion.
Proposicion 1.1.3 La distribucion de Xn, n ≥ 0 queda determinada por las probabilidades detransicion y la distribucion inicial, es decir, para cada n ∈ N y x0, x1, · · · , xn ∈ E
P(Xn = xn, Xn−1 = xn−1, · · · , X0 = x0) = π0(x0)px0x1px1x2 · · · pxn−1xn .
Demostracion: Usando varias veces la propiedad de Markov, tenemos que
P(Xn = xn, Xn−1 = xn−1, · · · , X0 = x0)
= P(Xn = xn|Xn−1 = xn−1, · · · , X1 = x1, X0 = x0)P(Xn−1 = xn−1, · · · , X1 = x1, X0 = x0)
= P(Xn = xn|Xn−1 = xn−1)P(Xn−1 = xn−1|Xn−2 = xn−2, · · · , X1 = x1, X0 = x0)
×P(Xn−2 = xn−2, · · · , X1 = x1, X0 = x0)
= pxn−1xnP(Xn−2 = xn−2|Xn−1 = xn−1)P(Xn−2 = xn−2, · · · , X1 = x1, X0 = x0)
= pxn−1xnpxn−2,xn−1P(Xn−2 = xn−2, · · · , X1 = x1, X0 = x0)...
= pxn−1xnpxn−2xn−1 · · · px0x1π0(x0).
La proposicion anterior nos permite decir “sea Xn, n ≥ 0 una cadena de Markov con dis-tribucion inicial π0 y matriz de transicion P ≡ (px,y), donde x, y ∈ E”. Notemos que las entradas
4

de la matriz de transicion contienen las probabilidades de transcion a un pasa. ¿Como usar P paracalcular probabilidades de transcion en m pasos?
Por el momento, supongamos que m = 2. Entonces,
p(2)xy = P(X2 = y|X0 = x)
=∑x1∈E
P(X2 = y,X1 = x1|X0 = x)
=∑x1∈E
P(X2 = y|X1 = x1, X0 = x0)P(X1 = x1|X0 = x0)
=∑x1∈E
px0x1px1x2 .
Notemos que p(2)xy ≡ P 2
xy, es decir, la entrada (x, y) de la matriz P 2. Mas generalmente, paracualquier m ∈ N, se tiene que
p(m)xy = Pm
xy.
La matriz Pm es llamada matriz de transcion en m pasos.Ahora vamos a ver una de las propiedades mas utiles de la teorıa de cadenas de Markov, la
llamada ecuacion de Chapman-Kolmogorov, que es una formula para calcular probabilidades detranscion en n+m pasos apartir de las transiciones en n y m pasos.
Proposicion 1.1.4 Sea Xn, n ≥ 0 una cadena de Markov con espacio de estados E. Para todon,m ∈ N y x, y ∈ E se cumple
p(n+m)xy = P(Xn+m = y|X0 = x) =
∑z∈E
p(m)xz p(n)zy . (1.4)
Demostracion: Para la demostracion usaremos la propiedad de Markov y la ley de probabilidadtotal:
p(n+m)xy = P(Xn+m = y|X0 = x)
=P(Xn+m = y,X0 = x)
P(x0 = x)
=
∑z∈E P(Xn+m = y,Xm = z,X0 = x)
P(X0 = x)
=∑z∈E
P(Xn+m = y|Xm = z,X0 = x)P(Xm = z,X0 = x)
P(X0 = x)
=∑z∈E
P(Xn+m = y|Xm = z)P(Xm = z,X0 = x)
P(X0 = x)
=∑z∈E
P(Xn = y|X0 = z)P(Xm = z|X0 = x)
=∑z∈E
p(m)xz p(n)zy .
5

1.2. Clasificacion de estados
Definicion 1.2.1 Sea Xn, n ≥ 0 una cadena de Markov con espacio de estados E y matriz detranscion P . Dados x, y ∈ E se define lo siguiente:
1. De x se accede a y si existe n ≥ 0 tal que p(n)xy > 0, y se denota por (x→ y).
2. x y y se comunican entre sı, y se denota por (x↔ y), si (x→ y) y (y → x).
La relacion (x↔ y) es una relacion de equivalencia como lo muestra la siguiente
Proposicion 1.2.2 (x↔ y) es una relacion de equivalencia y da lugar a una particion del espaciode estados E.
Demostracion: Dedemos probar que
(i) (x↔ x)
(ii) (x↔ y) si y solo si (y ↔ x)
(iii) (x↔ y) y (y ↔ z) implican que (x↔ z).
Notemos que (i) se cumple ya que p(0)xx = δxx = 1 > 0. La propiedad (ii) se sigue directamente de
la definicion. Veamos que (iii) se cumple: sabemos que existen n,m, n′,m′ ∈ N tales que
p(n)xy > 0, p(m)yx > 0, p(n
′)yz > 0, p(m
′)zy .
Lo anterior implica que (x → z). En efecto, por la ecuacion de Chapman-Kolmogorov (1.4) setiene que
p(n+n′)
xz =∑l∈E
p(n)xl p
(n′)lx ≥ p(n)xy p
(n′)yz > 0.
Del mismo modo se verifica que (z → x). Por lo tanto, (x↔ z).
La proposicion anterior nos permite hablar de clases de estados:
Definicion 1.2.3 1. Una clase de equivalencia, respecto a (x↔ y), se llama clase de comuni-cacion.
2. Dado x ∈ E, su clase de comunicacion se denota por
C(x) = y ∈ E : x↔ y.
3. Se dide que un subconjunto de estados C ⊂ E es cerrado si ningun estado de Cc puede seraccedido desde un estado en C, es decir, si p
(m)xy = 0 para todo x ∈ C, y ∈ Cc y cualquier
m ≥ 1.
Ejemplos:
6

1. Considere una cadena de Markov con espacio de estados E = 1, 2, 3 y matriz de transcion
P =
1 0 00 2/3 1/30 1/2 1/2
En este caso hay dos clases de comunicacion: 1 y 2, 3, ambas clases son cerradas.
2. Considere una cadena de Markov con espacio de estados E = 0, 1, 2, 3, 4, 5 y matriz detransicion
P =
1/3 0 2/3 0 0 00 1/4 0 3/4 0 0
2/3 0 1/3 0 0 00 1/5 0 4/5 0 0
1/4 1/4 0 0 1/4 1/41/6 1/6 1/6 1/6 1/6 1/6
Las clases de comunicacion de la cadena son: 0, 2, 1, 3, 4, 5. Ejercicio...
Ahora veremos el concepto de irreducibilidad de una cadena de Markov.
Definicion 1.2.4 Se dice que una cadena de Markov Xn es irreducibe si se cumple cualquiera dela siguentes condiciones (equivalentes entre sı):
(i) Desde cualquier estado de E se puede acceder a cualquier otro estado.
(ii) Todos los estados se comunican entre sı.
(iii) C(x) = E para algun x ∈ E.
(iv) C(x) = E para todo x ∈ E.
(v) El unico conjunto cerrado es el total.
Ejemplos...
Definicion 1.2.5 Sea Xn una cadena de Markov con espacio de estados E. Dado x ∈ E definimosq = P(Xn = x para algun n ∈ N|X0 = x), se dice que:
x es un estado recurrente si q = 1.
x es un estado transitorio si q < 1.
x es un astado absorbente si pxx = 1.
Una clase de comunicacion es clase recurrente si todos sus estados son recurrentes.
Notemos que en el caso en que x es un estado transitorio se tiene
P(Xn 6= x para todo n ≥ 1|X0 = x) > 0,
es decir, con probabilidad positiva la cadena nunca regresa al punto de inicio. Un estado absorbente,como su nombre lo indica, una vez que la cadena llega a el ahı permanece.
Pasaremos ahora a definir el concepto de tiempo de entrada a un conjunto A ⊂ E.
7

Definicion 1.2.6 Dado A ⊂ E, se define el primer tiempo de entrada a A, TA, como
TA =
mınn ≥ 0 : Xn ∈ A, si n ≥ 0 : Xn ∈ A 6= ∅+∞, si n ≥ 0 : Xn ∈ A = ∅.
Notemos que TA denota la primera vez que la cadena visita (entra) el conjunto A.
1.3. Algunos modelos importantes
Modelo de inventarios
Sea (ξn, n ≥ 0) una sucesion de variables aleatorias independientes e identicamente distribuidastales que
P(ξn = k) = ak, k = 0, 1, · · · ,donde ak ≥ 0 y
∑k ak = 1.
Supongamos que nos interesa modelar el nivel de un inventario. Los lımites maximo y mınimodel inventario son S y s (S > s), respectivamentecon S > s. El nivel del invetario se revisa a finalde cada periodo (diario, mensual, etc.) si hay al menos s unidades entonces se surte hasta el nivelS, y si hay mas de s entonces no se surte el faltante. Sea Xn el nivel del inventario al final delperıodo n.
Xn+1 =
Xn − ξn+1, si s < Xn ≤ S,
S − ξn+1, si Xn ≤ s.
De la relacion anterior y la independencia de la sucesion (ξn) obtenemos que el Xn, n ≥ 0 es unacadena de Markov. Notemos que el espacio de estados es
E = S, S − 1, · · · , 1, 0,−1,−2 · · · .
Las probabilidades de transicion de Xn, n ≥ 0 estan dadas por
pij = P(Xn+1 = j|Xn = i)
=
P(ξn+1 = i− j), s < i ≤ S,
P(ξn+1 = S − j), i ≤ s.
Modelo de Wright-Fisher
Supongamos que se tiene una poblacion compuesta de 2N genes, que pueden ser del tipo a ode tipo A. El tiempo se mide en generaciones, y se esta interesado en el numero de genenes deltipo A en la n-esima generacion. Sea Xn el numero de tales genes.
La composicion de la poblacion en la generacion n+ 1 se determina de la siguiente manera: sien la generacion n hay j del tipo a y 2N − j del tipo A, entonces la probabilidad de que el “padre”de un individuo en la generacion n + 1 sea del tipo a es pj = j
2Nmientras que con probabilidad
qj = 1− 2N−j2N
es del tipo A. Entonces,
pjk = P(Xn+1 = k|Xn = j) =
(2N
k
)pkj q
2N−kj , j, k = 0, 1, 2, · · · , 2N.
8

De la relacion anterior se sigue inmediatamente que Xn, n ≥ 0 es una cadena de Markov conespacio de estados E = 0, 1, · · · , 2N.
La urna de Ehrenfest
Supongamos que estamos interesados en modelar la difusion de partıculas a traves de unamembrana. En escenerio es el siguiente: se tienen dos urnas (A y B), con a bolas repartidas dentrode ellas. Las bolas estan numeradas de 1, 2, · · · , a. En cada etapa, se escoge un numero al azar(uniforme) entre 1 y a, y la bola correspondiente se cambia de urna. Sea Xn el numero de bolasen la urna A en la etapa n.
Es claro que, Xn+1 solo depende de Xn. Por lo tanton, Xn, n ≥ 0 es una cadena de Markovcon el espacio de estados es E = 1, 2, · · · , a.
Las probabilidades de transicion estan dadas por
pij = P(Xn+1 = j|Xn = i) =
ia, si i > 0, j = i− 1,
a−ia, si i < a, j = i+ 1,
0, en otro caso.
Caminatas aleatorias
Sea (Xn, n ≥ 1) una sucesion de variables aleatorias i.i.d. con distribucion comun dada por
P(X1 = 1) = 1− P(X1 = −1) = 1− q = p.
La sucesion (Sn, n ≥ 0), donde
Sn = S0 +n∑i=1
Xi,
es llamada caminata aleatoria simple. En general, S0 puede ser constante o una variable aleatoria,se dice que la caminata inicia en S0. Si p = q = 1
2es llamada caminata aleatoria simple simetrica.
b
b b
b
b
b
b
b
b
b
9

Las caminatas aleatorias son utiles para modelar varios fenomenos: podemos usarlo para mod-elar la posicion de una partıcula que se mueve en los enteros, a cada paso la partıcula puedeavanzar o retroceder por un paso con probabilidad p y 1 − p, respectivamente. Ademas, la direc-cion (izquierda o derecha) es independiente de los pasos anteriores. Asimismo pueden servir paramodelar un juego de apuestas donde en cada jugada se pierde o se gana una unidad.
El objetivo del Capıtulo 3 es estudiar diversas propiedades de caminatas aleatorias.
Procesos Galton-Watson
Supongamos que una poblacion de partıculas (moleculas, virus, etc.) evoluciona de la siguientemanera: la poblacion inicia al tiempo n = 0 con una partıcula, al tiempo n = 1 dicha partıculamuere y da oringen a un numero aleatorio (X) de partıculas identicas entre sı y su progenitoray, a tiempos subsecuentes n = 2, 3, . . . , cada individuo evoluciona de la misma manera (muriendoy ramificandose) produciendo ası X partıculas cada uno. El numero de partıculas que producecada individuo es independiente de los demas y que tiene la misma distribucion que X. Sea Zn eltamano de la poblacion al tiempo n, entonces Z = Zn : n ≥ 0 es un proceso estocastico en cual,a cada tiempo, nos da el total de la poblacion.
Sea (Xni , n ≥ 0, i ≥ 1) un coleccion de variables aleatorias independientes todas con la misma
distribucion que X. Entonces, el proceso Z se puede describir de la siguiente manera, Z0 = 1 y
Zn+1 =Zn∑i=1
Xni , n = 0, 1, . . . , (1.5)
donde Xni representa el numero de descendientes que produce el i-esimo individuo presente en la
generacion n. Una consecuencia de la independencia de la coleccion (Xni ) y (1.5) es que el proceso
Z es una cadena de Markov
Proceso de Galton -Watson
b
b
b
b
b
b
b b
bbb
b bb b b b b
b
b b b
b b
b b
bb
b b b b
b
En el Capıtulo 4 trataremos este modelo.
1.4. Analisis de un paso
Una tecnica muy util para encontrar el valor de diversos funcionales de una cadena de Markoves el analisis de un paso, el cual consiste en condicionar a la primera transicion que realiza lacadena y luego iniciar (propiedad de Markov) el proceso. Vamos a ilustrar la tecnica con algumosejemplos.
10

Ejemplo 1.4.1 Considere una cadena de Markov Xn con espacio de estados E = 0, 1, 2 ymatriz de transicion
0 1 20 1 0 01 α β γ2 0 0 1
donde α, β, γ > 0 y tales que α + β + γ = 1. Sea T ≡ T0,2, encuentre u := P(XT = 0|X0 = 1) yvi := E[T |X0 = i], i = 0, 1, 2.
Solucion: Por la Ley de Probabilidad Total, se tiene
u = P(XT = 0|X0 = 1)
=2∑j=0
P(XT = 0|X0 = 1, X1 = j)P(X1 = j|X0 = 1)
=2∑j=0
P(XT = 0|X1 = j)p1j,
para obtener la ultima igualdad usamos la propiedad de Markov. Ahora bien, dado que 0 y 2 sonestados absorbentes, tenemos
P(XT = 0|X1 = 0) = 1, P(XT = 0|X0 = 1) = u y P(XT = 0|X0 = 2) = 0.
Entonces,u = α + uβ.
Por lo tanto,
u =α
1− β=
α
α + γ.
Ahora veremos como encontrar v. Notemos que v0 = v2 = 0, pues la cadena inicia en la claseabsorbente. Por otro lado, si X0 = 1 se requiere de al menos un paso para que la cadena seaabsorbida por la clase 0, 2. Luego, nuevamente por la Ley de Probabilidad Total, obtenemos
v1 = 1 + 0α + vβ + 0γ,
es decir, v = 11−β .
Ejemplo 1.4.2 Un raton se pone en un laberinto con el que se muestra en la siguiente figura:
0 71
2 3 4
8 5 6
11
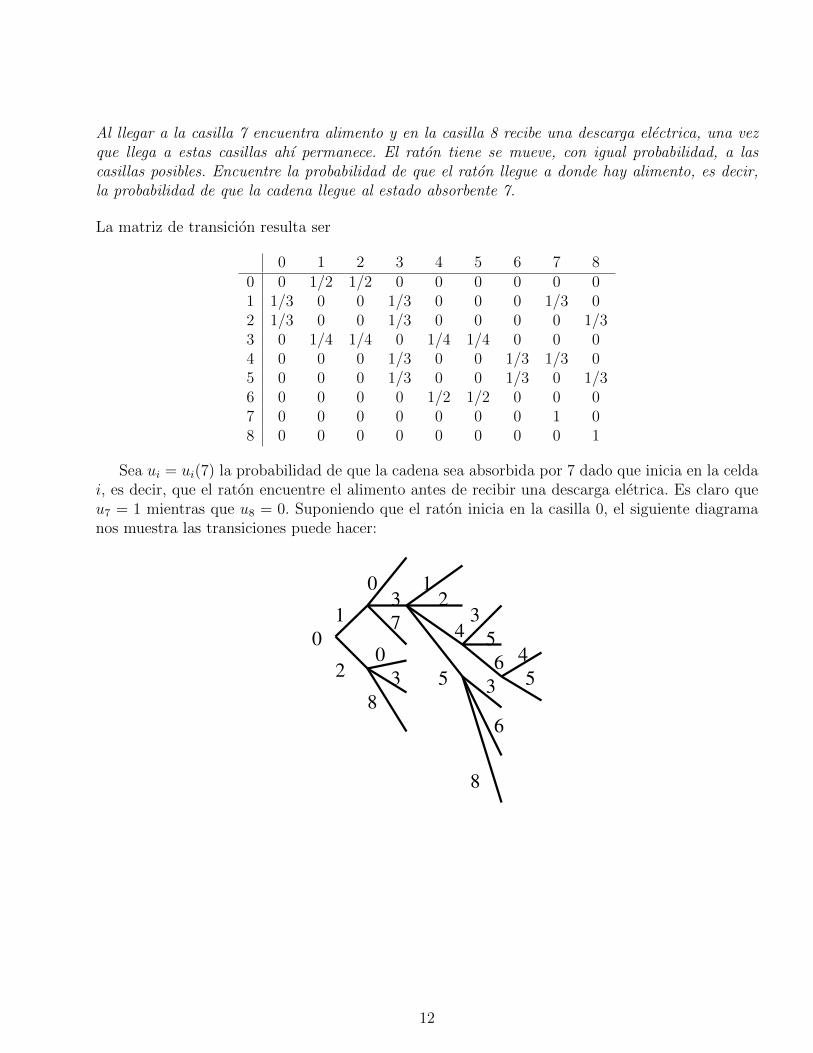
Al llegar a la casilla 7 encuentra alimento y en la casilla 8 recibe una descarga electrica, una vezque llega a estas casillas ahı permanece. El raton tiene se mueve, con igual probabilidad, a lascasillas posibles. Encuentre la probabilidad de que el raton llegue a donde hay alimento, es decir,la probabilidad de que la cadena llegue al estado absorbente 7.
La matriz de transicion resulta ser
0 1 2 3 4 5 6 7 80 0 1/2 1/2 0 0 0 0 0 01 1/3 0 0 1/3 0 0 0 1/3 02 1/3 0 0 1/3 0 0 0 0 1/33 0 1/4 1/4 0 1/4 1/4 0 0 04 0 0 0 1/3 0 0 1/3 1/3 05 0 0 0 1/3 0 0 1/3 0 1/36 0 0 0 0 1/2 1/2 0 0 07 0 0 0 0 0 0 0 1 08 0 0 0 0 0 0 0 0 1
Sea ui = ui(7) la probabilidad de que la cadena sea absorbida por 7 dado que inicia en la celdai, es decir, que el raton encuentre el alimento antes de recibir una descarga eletrica. Es claro queu7 = 1 mientras que u8 = 0. Suponiendo que el raton inicia en la casilla 0, el siguiente diagramanos muestra las transiciones puede hacer:
01
2
037
03
8
12
4
5
356 4
53
6
8
12

0 1 2 3
4 5 6 7
8
Esquema de transiciones
Luego, utilizando el diagrama anterior, obtenemos que
u0 =1
2(u1 + u2)
u1 =1
3(u0 + u3 + u7)
u2 =1
3(u0 + u3 + u8)
u3 =1
4(u1 + u2 + u4 + u5)
u4 =1
3(u3 + u6 + u7)
u5 =1
3(u3 + u6 + u8)
u6 =1
2(u4 + u5).
Por la simetrıa del problema, se tiene que u0 = u6 y u1 = u4. Por otro lado, dado que las transicionesson uniformes, si el raton inicia en la casilla 3 entonces u3 = 1/2. Luego, recordando que u7 = 1 yu8 = 0, obtenemos que u0 = 1
2, u1 = 2
3y u2 = 13.
13

Capıtulo 2
Caminatas aleatorias simples
2.1. Introduccion
Para iniciar el estudio de caminatas aleatorias conviene recordar la definicion de independenciade una coleccion de variables aleatorias: se dice que (Xn, n ≥ 1) es una sucesion de variablesindendientes, si para cada n-eada de enteros (k1, k2, · · · , kn) distintos se cumple que las variablesaleatorias Xk1 , Xk2 , · · · , Xkn son indenpendientes.
Definicion 2.1.1 Sea (Xn, n ≥ 1) una sucesion de variables aleatorias i.i.d. con distribucioncomun dada por
P(X1 = 1) = 1− P(X1 = −1) = 1− q = p.
La sucesion (Sn, n ≥ 0), donde
Sn = S0 +n∑i=1
Xi,
es llamada caminata aleatoria simple. En general, S0 puede ser constante o una variable aleatoria,se dice que la caminata inicia en S0. Si p = q = 1
2es llamada caminata aleatoria simple simetrica.
Las caminatas aleatorias son utiles para modelar varios fenomenos: podemos usarlo para modelarla posicion de una partıcula que se mueve en los enteros, a cada paso la partıcula puede avanzar oretroceder por un paso con probabilidad p y 1−p, respectivamente. Ademas, la direccion (izquierdao derecha) es independiente de los pasos anteriores. Asimismo pueden servir para modelar un juegode apuestas donde en cada jugada se pierde o se gana una unidad.
Las caminatas aleatorias simples se grafican en el plano cartesiano con los puntos (n, Sn)∞n=0
uniendo los puntos vecinos con lineas rectas con pendiente 1 o -1. A la grafica resultante se lellama trayectoria o realizacion, y dado que es trata de una sucesion de variables aleatorias, paraω ∈ Ω se tiene una trayectoria o realizacion. La siguente grafica muestra una realizacion de unacaminata aleatoria que inicia en 0:
14

b
b b
b
b
b
b
b
b
b
Ejemplo 2.1.2 Dos jugadores A y B juegan una serie de volados de modo que A le gana 1 pesoa B cada vez que la moneda cae aguila (con probababilidad p) o A le paga un peso a B en casocontrario. Supongamos que A inicia con a pesos y B con b pesos. El juego se detiene cuando algunode los jugadores se queda sin dinero. ¿Cual es la probababilidad de que A gane el juego?Solucion: sea
Ak = P(A gane el juego dado que inicia con a pesos),
notemos que A = 0 y Aa+b = 1. Condicionando en el primer volado obtenemos que
Ak = pAk+1 + qAk−1.
Ademas, por idenpendencia podemos obtener que Ak = Ak1 y para simplificar notacion definimosr = A1. Entonces, de la ecuacion anterior se sigue que
rk = prk+1 + qrk−1,
dividiendo por rk−1 se tienepr2 − r + q = 0.
Las soluciones de la ecuacion anterior estan dadas por r1 = 1 y r2 = qp. En efecto, la solucion
general es
r =1±√
1− 4pq
2p
=1± |p− q|
2p,
ya que 1− 4pq = (p− q)2.Luego,
Ak = c1(1)k + c2
(q
p
)k.
Ahora bien, de A0 = 0 y Aa+b = 1 se tiene que c1 = −c2 con
c2 =1(
qp
)a+b− 1
.
15

Por lo tanto,
Ak = − 1(qp
)a+b− 1
+1(
qp
)a+b− 1
(q
p
)k
=
(qp
)k− 1(
qp
)a+b− 1
.
2.2. Propiedades de las caminatas aleatorias simples
Lema 2.2.1 Toda caminata aleatoria simple Sn, n ≥ 0, con S0 = a, posee las siguientespropiedades:
(i) Homogeneidad espacial:
P(Sn = j|S0 = a) = P(Sn = j + b|S0 = a+ b).
(ii) Homogeneidad temporal, para todo n,m ∈ Z:
P(Sn = j|S0 = a) = P(Sn+m = j|Sm = a).
(iii) Propiedad de Markov, para todo n,m ∈ Z,
P(Sn+m = j|S0, S1, · · · , Sn) = P(Sn+m = j|Sn). (2.1)
Demostracion: (i) Veamos el lado izquierdo
P(Sn = j|S0 = a) =P(Sn = j, S0 = a)
P(S0 = a)= P
(n∑i=1
Xi = j − a
),
note que usamos el hecho P(S0 = a) = 1. Analogamente, el lado derecho satisface
P
(n∑i=1
Xi = j − a
)= P(Sn = j + b, S0 = a+ b) = P
(n∑i=1
Xi = j + b− (a+ b)
).
16

(ii) Procederemos como en (i). El lado derecho es igual a
P(S0 +
∑n+mi=1 Xi = j, S0 +
∑mi=1Xi = a
)P (S0 +
∑mi=1Xi = a)
=P(∑n+m
i=m+1Xi = j − a, S0 +∑m
i=1Xi = j)
P (S0 +∑m
i=1Xi = j)
= P
(n+m∑i=m+1
Xi = j − a
)(independencia)
= P
(n∑i=1
Xi = j − a
),
la ultima igualdad es debido al hecho que el vector (X1, · · · , Xn) tiene la misma distribucion queel vector (Xm+1, Xm+1, · · · , Xn+m). Un calculo similar, pero mas simple, demuestra la igualdaddeseada.
(iii) Sean s0, s1, · · · , sn enteros tales que
P(Sn+m = j|S0 = s0, S1 = s1, · · · , Sn = sn)
=P(S0 = s0, S1 = s1, · · · , Sn = sn, Sn+m = sn+m)
P(S0 = s0, S1 = s1, · · · , Sn = sn)
=P(S0 = s0, X1 = s1 − s0, X2 = s2 − s1, · · · , Xn = sn − sn−1,
∑n+mi=n+1Xi = sn+m − sn)
P(S0 = s0, X1 = s1 − s0, X2 = s2 − s1, · · · , Xn−1 = sn−1 − sn−2, Xn = sn − sn−1)
= P(n+m∑i=n+1
Xi = sn+m − sn).
Por otro lado, tenemos que
P(Sn+m = sn+m|Sn = sn) =P(Sn+m = sn+m, Sn = sn)
P(Sn = sn)
= P(n+m∑i=n+1
Xi = sn+m − sn).
En el siguiente resultado calcularemos las probabilidades de transicion para la caminata aleato-ria simple.
Lema 2.2.2 Para todo a, b ∈ Z y n ≥ 0, se tiene que
P(Sn = b|S0 = a) =
(n
(n+b−a)/2
)p(n+b−a)/2q(n−b+a)/2 si (n+ b− a)/2 ∈ Z,
0 en otro caso.
17

Demostracion: Se tiene que, una realizacion que lleva del punto (0, a) al punto (0, b) en n pasostiene r pasos hacia arriba (+1) y l pasos hacia abajo (−1), donde r, l son tales que l + r = n yr− l = b− a. Lo anterior es debido a que, Sn = r(+1) + l(−1) = b− a. Resolviendo las ecuacionesantariores obtenemos que,
r =n+ b− a
2y l =
n− b+ a
2.
Ahora bien, cada realizacion que lleva de a a b en n pasos tiene probabilidad prql, y hay(
n(n+b−a)/2
)realizaciones posibles. Por lo que el resultado se sigue.
Note que, la prueba del resultado anterior se basa en el conteo de trayectorias, i.e., “casos fa-vorables”/“casos posibles”. Esta es una propiedad de muy interesante y que ha llamado la atencionno solo de la comunidad probabilista sino que tambien es explotada en teorıa combinatoria, teorıade juegos, entre otras.
En lo que sigue procederemos a calcular probabilidades asociadas a la caminata aleatoria simplemediante las herramientas estudiadas hasta el momento. A saber, mediante el uso de esperanzacondicional.
Definicion 2.2.3 Para cada j ∈ Z, el primer tiempo de llegada al estado j se define por
Tj = mınn ≥ 0 : Sn = j.
Proposicion 2.2.4 Para cada j ∈ Z, sea hj la probabilidad de que una caminata aleatoria queparte del estado j llegue al estado 0 antes de llegar al estado N , i.e., hj = P(T0 < Tn|S0 = j).Entonces,
hj =
( qp)j−( q
p)N
1−( qp)N
p 6= q,
1− jN
p = 12.
Demostracion: Condicionando en la primera transicion obtenemos la ecuacion,
hj = phj+1 + qhj−1,
para j ∈ 1, 2, · · · , N − 1. Ademas, notemos que h0 = 1 y hN = 0. Reescribiendo la encuacionanterior se obtiene
hn = phn+1 + qhn−1 ⇐⇒ q(hn+1 − hn) = p(hn+1 − hn), n ≥ 1. (2.2)
El caso simetrico: p = q = 1/2. En este caso, se tiene la ecuacion
hn − hn−1 = hn+1 − hn, n ≥ 1.
Por lo tanto, la recta hn tiene una pendiente constante c := hn+1 − hn, en consecuencia
hn = 1 +n∑j=1
(hj − hj−1) = 1 + nc, 1 ≤ n ≤ N.
18

Ahora bien, recordando que hN = 1 obtemos que c = −1/N , i.e., hn = 1− n/N .El caso general: p 6= q. Definamos la sucesion (xn, n ≥ 0) como sigue, x0 ∈ R (se determinara masadelante) y xn = hn−hn−1, para 1 ≤ n ≤ N . De la ecuacion en el lado derecho de (2.2) obtenemosque la sucesion (xn, n ≥ 0) satisface la relacion xn+1 = q
pxn, para 1 ≤ n ≤ N . Por lo tanto,
xn+1 =
(q
p
)nx0, 0 ≤ n ≤ N. (2.3)
Luego, dado que
hn = h0 +n∑j=1
(hj − hj−1),
la ecuacion (2.3) implica
hn = h0 + x0
n∑j=1
(q
p
)j
= h0 + x0
(q
p
) 1−(qp
)n1−
(qp
) . (2.4)
Haciendo uso del hecho que, hN = 0 y h0 = 1, obtenemos que
0 = 1 + x0
(q
p
) 1−(qp
)n1−
(qp
) ,de donde se sigue que
x0 = −pq
1− qp
1−(qp
)N .Finalmente, de (2.4) se concluye que
hn =
(qp
)n−(qp
)N1−
(qp
)N .
Corolario 2.2.5 Para cada j ∈ N se tiene que
P(T0 <∞|S0 = j) =
1 si q ≤ p,(qp
)jsi q > p.
19

Demostracion: Para cada n, sea An := T0 < Tn. Notemos que An ⊂ An+1, dado que Tn ≤ Tn+1,para cada n. Ademas, observemos que
T0 <∞ = ∪∞n=1T0 < Tn.
Por lo tanto, dado que (An) es una sucesion creciente, la continuidad de la medida de probababil-idad implica
lımn→∞
P(An|S0 = j) = P(T0 <∞|S0 = j).
Luego, el resultado se sigue de la proposicion anterior.
Sean a, b ∈ Z y n ∈ N. Sea Nn(a,b) el numero de trayectorias que van de a a b en n pasos yN0n(a,b) las trayectorias que unen a y b en n pasos; y que ademas, pasan por 0 al menos una vez.
Teorema 2.2.6 (Principio de Reflexion) Para cada a, b ∈ N se tiene que
N0n(a,b) = Nn(−a,b).
Demostracion: Haciendo bosquejo podemos ver que cada trayectoria que lleva de (0, a) a (b, n)cruza el eje x por lo menos una vez, sea (k, 0) el punto donde esto ocurre por primera vez.
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
Reflejando el segmento de la trayectoria anterior se obtiene una trayectoria de (0, a) a (b, n)y que pasa por el eje x por lo menos una vez. Luego, haciendo lo mismo en el sentido opuestoobtenemos el resultado.
Lema 2.2.7 Para todo a, b ∈ Z, se cumple que
Nn(a,b) =
(n
12(n+ b− a)
).
20

Veamos el siguiente resultado importante, el cual es una consecuencia del lema anterior.
Teorema 2.2.8 (Teorema de las votaciones (Ballot Theorem) Sea b ∈ N, entonces el numero derealizaciones que van de (0, 0) a (n, b) y que no visitan al eje x despues del primer paso esta dadopor
b
nNn(0,b).
Demostracion: Notemos que, las trayectorias que nos interesa contar en el primer paso se en-cuentran en (1, 1). Por lo tanto, en numero de trayectorias de interes esta dado por
Nn−1(1,b) −N0n−1(1,b) = Nn−1(1,b) −Nn−1(−1, b)
=(n− 1)!(
n−b2
)!(n+b−2
2
)!− (n− 1)!(
n−b−22
)!(n+b2
)!
=(n− 1)!(
n−b2
)!(n+b2
)!
(n+ b
2− n− b
2
)=
b
nNn(0,b).
Veamos ahora porque el resultado anterior se llama Teorema de las votaciones. Sunpongamos quetenemos dos candidatos A y B, y que A obtiene a votos y B obtiene b votos, donde a > b. Cual esla probabilidad de que A tenga la ventaja durante toda la votacion?
Supongamos que Xi = 1 si el i-esimo individuo vota por el candidato A y vale -1 si vota elcanditato B. Supongamos que cualquier combinacion de votos es igualmente probable, i.e., cadauna tiene probabilidad
(α+βα
). La trayectoria que deben seguir las votaciones para que A tenga las
preferencias durante toda la jornada de votaciones va del punto (0, 0) al punto (α+ β, α− β). Porlo tanto, por el Teorema 2.2.8 esta dada por
α− βα + β
Nα+β(0,α−β)1(
α+βα
) =α− βα + β
.
El siguiente resultado es una aplicacion del Principio de Reflexion (Teorema 2.2.6)
Teorema 2.2.9 Supongamos que S0 = 0, entonces para todo n ≥ 0 se cumple que
P(S1S2 · · ·Sn 6= 0, Sn = b) =|b|nP(Sn = b) (2.5)
Demostracion: Supongamos que S0 = 0 y Sn = b > 0. Notemos que, S1S2 · · ·Sn 6= 0 si y solo sila caminata aleatoria no visita el eje x en el intervalo de tiempo [1, n]. Por lo tanto, por el Teorema2.2.8 se tiene que el numero de tales trayectorias es
b
nNn(0, b)
21

y por argumentos similares a los del Lema 2.2.2 se sigue que hay (n + b)/2 pasos hacia arriba y(n− b)/2 pasos hacia abajo. Por lo tanto,
P(S1S2 · · ·Sn 6= 0, Sn = b) =b
nNn(0, b)p(n+b)/2q(n−b)/2
=b
n
(n
12(n+ b)
)p(n+b)/2q(n−b)/2
=b
nP(Sn = b|S0 = 0).
El caso b < 0 es similar, concluyendo ası que
P(S1S2 · · ·Sn 6= 0, Sn = b) =|b|nP(Sn = b).
Observacion 2.2.10 Notemos que, la ecuacion (2.5) implica
P(S1S2 · · ·Sn 6= 0) =1
nE(|Sn|).
Ahora vamos a analizar el comportamiento de los maximos de una caminata aleatoria. SeaMn := Sk : 1 ≤ n, n ≥ 1, el maximo de (Sn) hasta el tiempo n. Tenemos el siguiente
Teorema 2.2.11 Supongamos que S0 = 0. Entonces, para cada r ≥ 1, se cumple
P(Mn ≥ r, Sn = b) =
P(Sn = b), si b ≥ r,(qp
)r−bP(Sn = 2r − b), si b < r.
Demostracion: Supongamos que r ≥ 1 y que b < r, pues el caso b ≥ r es trivial. Sea N rn(0, b) el
numero de realizaciones que van del (0, 0) a (n, b) y que pasan por el estado r al menos una vez.Sea ir el primer tiempo al cual la caminata visita el estado r, reflejando la trayectoria entre ir y nen la recta r se obtiene una trayectoria que va de (0, 0) a (n, 2r − b). Ahora bien, a una de estastrayectorias le aplicamos la transformacion inversa y obtenemos una que va de (0, 0) a (n, b) y queademas pasa por r. Entonces, se obtiene que
N rn(0, b) = Nn(0, 2r − b),
y sabemos que cada una de tales realizaciones tiene probabilidad p(n+b)/2q(n−b)/2. Por lo tanto,
P(Mn ≥ r, Sn = b) = N rn(0, b)p(n+b)/2q(n−b)/2
=
(q
p
)r−bNn(0, 2r − b)p(n+2r+b)/2q(n−2r+b)/2
=
(q
p
)r−bP(Sn = 2r − b).
22

Una pregunta interesate que podemos hacerno es la siguiente, ¿Cual es la probabilidad de que(Sn), S0 = 0, alcance el nivel b por primera vez al tiempo n? Sea fb(n) tal probabilidad.
Teorema 2.2.12 Para cada n ≥ 1 se cumple que
fb(n) =|b|nP(Sn = b).
Demostracion: Supongamos que b > 0. Notemos que,
fb(n) ≡ P(Mn−1 = Sn−1 = b− 1, Sn = b)
= (P(Mn−1 = Sn−1 = b− 1, Sn = b)P(Mn−1 = Sn−1 = b− 1)
= pP(Mn−1 = Sn−1 = b− 1)
= p [P(Mn−1 ≥ b− 1, Sn−1 = b− 1)− P(Mn−1 ≥ b, Sn−1 = b− 1)]
= p
[P(Sn−1 = b− 1)− q
pP(Sn−1 = b− 1)
]=
b
nP(Sn = b),
donde en la penultima igualdad usamos el Teorema 2.2.11.El caso b < 0 se obtiene de manera similar.
Ejemplo 2.2.13 Sea (Sn)n≥0 una caminata aleatoria simple con S0 = 0. Para cada r 6= 0 defi-namos Vr como el numero de visitas al estado r antes de que la cadena regrese a su estado inicial.(i) Demuestre que E(Vr) = 1.(ii) Dar un criterio para determinar si el numero de visitas a 0 es finito o infinito.
Solucion: (i) Sea An el evento que “al tiempo n la caminata visita el estado r y no ha visitado elestado 0 hasta ese instante”. Entonces, Vr ≡
∑≥1 1An . Por otro lado, se tiene que
E(1An) = P(An) = P(Sn = r, S1S2 · · ·Sn 6= 0) =|r|nP(Sn = r) ≡ fr(n).
Por lo tanto,
E(Vr) = E(∑≥1
1An) =∑n≥1
fr(n) = 1.
Vamos a ver demostrar la ultima igualdad. Note que,∑n≥1
fr(n) ≡ P(Sn = r, para algun n) := fr.
Condicionando en el primer salto, i.e., en S1 obtemos la ecuacion
fr =1
2(fb+1 − fb−1), b > 0,
23

con condicion inicial f0 = 1. Resolviendo la ecuacion obtenemos que fb = 1. Lo mismo se puedehacer para el caso b < 0.(ii) Sea R el numero total de visitas al estado 0. Notemos que, R =
∑n≥0 1Sn=0, entonces
E(R) =∑n≥0
P(Sn = 0) =∑k≥0
(2k
k
)pkqk. (2.6)
Notemos que, pq ≤ 1/4 y pq = 1/4 si y solo si p = 1/2. Luego, usando la identidad de Stirling
n! ∼ nn+12 e−n√
2π, se tiene que para k suficientemente grande(2k
k
)∼ (2k)2k+1/2e−2k√
2π(kk+1/2e−2)2= (√
2π)−122k+1/2k−1/2,
es decir, el termino general en la serıe esta dado por la aproximacion(2k
k
)pkqk ∼ (
√π)−1k−1/2(4pq)k.
Por lo tanto, la serıe que aparece en (2.6) no es es convergente para p = 1/2 ya que el terminogeneral es de orden de k−1/2. Por otro lado, si p 6= 1/2, se tiene que 4pq < 1, en consecuencia (2.6)es convergente.
24

2.3. Ejercicios
1. Sea b un entero negativo. Demuestre que el numero de realizaciones que van de (0, 0) a (n, b)y que no visitan el eje x despues del primer paso esta dado por
−bnNn(0,b).
2. Sea Sn, n ≥ 0 la caminata aleatoria simple con S0 = 0, y defina T =: n ≥ 1 : Sn = 0 elprimer tiempo de regreso al punto de inicio. Demuestre que
P(T = 2n) =1
2n− 1
(2n
n
)2−2n.
Deduzca de lo anterior que E(Tα) <∞ si, y solo si, α < 12. Sugerencia: recuerde la formula
de Stirling, n! ∼ nn+12 e−n√
2π.
3. Sea Sn, n ≥ 0 la caminata aleatoria simple con S0 = 0, y defina T =: n ≥ 1 : Sn = 0 elprimer tiempo de regreso al punto de inicio. Demuestre que
P(T = 2n) =1
2n− 1
(2n
n
)2−2n.
4. Sea Sn, n ≥ 0 la caminata aleatoria simple simetrica con S0 = 0 y sea Mn = maxn≥0 Sn.Demuestre que
P(Mn = r) = P(Sn = r) + P(Sn = r + 1), r ≥ 0.
5. Sea Sn, n ≥ 0 la caminata aleatoria simple simetrica con S0 = 0.a) Demuestre que
P(S1S2 · · ·S2m 6= 0) = P(S2m = 0), m ≥ 1.
b) Sea α2n(2k) la probabilidad de que la ultima visita a 0 antes del tiempo 2n ocurrio en eltiempo 2k. Justifique que
α2n(2k) = P(S2k = 0)P(S1S2 · · ·S2n−2k 6= 0).
c) Pruebe queα2n(2k) = P(S2k = 0)P(S2n−2k = 0).
6. Sea (Sn)n≥0 un caminata aleatoria tal que p < q y S0 = 0. Definamos a M como el maximoabosluto de la caminta, es decir, M = supn≥0 Sn.
(a) Argumente la igualdad P(T0 < TN+j|S0 = 0) = P(T−j < TN |S0 = 0).
(b) Demuestre que
P(M < N |S0 = 0) = P(TN =∞|S0 = 0) = lımj→∞
P(TN > T−j|S0 = 0)
(c) Concluir que la distribucion de M dado que S0 = 0 es geometrica de parametro p/q.
25

Capıtulo 3
Procesos de Galton-Watson
3.1. Funciones generadoras de probabilidades
Definicion 3.1.1 Dado X = (X1, X2, . . . , Xn) un vector aleatorio discreto con valores en Zn+ yfuncion de probabilidades conjunta fX(x1, x2, . . . , xn), definimos la funcion generadora de proba-bilidades del vector X por
GX(s1, s2, . . . , sn) := E[sX11 sX2
2 · · · sXnn
], |si| ≤ 1, i = 1, . . . , n,
=∑
x1,x2,...,xn
sx11 sx22 · · · sxnn fX(x1, x2, . . . , xn)
De la definicion anterior obtenemos que la funcion generadora de probabilidades (f.g.p.) de Xi
esta dada porGXi
(s) = GX(1, . . . , 1, s, 1, . . . , 1) = E[sXi], |s| ≤ 1,
donde s aparece en la i-esima entrada.Notemos que, en general GX(s) esta bien definida para todo |s| ≤ 1. En efecto,
|GX(s)| = |∑x
sxP(X = x)| ≤∑x
|s|xP(X = x) ≤∑x
P(X = x) = 1.
Sin embargo, en algunos casos, puede extenderse el rango de definicion de GX . Al numero R > 0tal que |GX(s)| <∞, para todo |s| < R, se le llama radio de convergencia.
Ejemplo 3.1.2 (i) Supongamos que X ∼ Bin(n, p). Entonces,
GX(s) =n∑k=0
sk(n
k
)pk(1− p)n−k
=n∑k=0
(n
k
)(ps)k(1− p)n−k
= (q + ps)n, q := 1− p.
26

(ii) Si X ∼ Poisson(λ), se tiene
GX(s) =∞∑k=0
skλk
k!e−λ
= e−λe−λs = e−λ(1−s)
(iii) Si X ∼ Geo(p), entonces
GX(s) =∞∑x=0
sxp(1− p)x
=p
1− (1− p)s, |s| < 1
1− p.
Note que, R = 11−p en (iii) y R =∞ en (i) y (ii).
El siguiente resultado nos da luz de como podemos usar la funcion generadora de probabilidades.
Teorema 3.1.3 Sea X una variable aleatoria no negativa tal que P(X = n) = pn, n = 0, 1, . . . ,con funcion generadora de probabilidades G. Entonces,(i) G(s) es diferenciable en todo |s| < 1, y su derivada esta dada por
G′(s) =∞∑n=1
npnsn−1.
Para s = 1,
G′(1) := lıms↑1
∞∑n=1
npnsn−1 finito o infinito.
(ii) Para cada k ≥ 1, se tiene que la derivada k-esima esta dada por
G(k)(s) =∞∑n=1
n!
(n− k)!pns
n−k.
(iii) G determina la distribucion de X, es decir, (pn)≥0.
Demostracion: Solo vamos a demostrar parte (iii). Por definicion se tiene que
G(0) = P(X = 0) = p0.
Ahora bien, para cada k ≥ 1, tenemos que
G(k)(0) = lıms↓0
∞∑n=1
n!
(n− k)!pns
n−k = k!pk,
entonces
pk =1
k!G(k)(0).
27

Por lo tanto, G determina (pk)k≥0.
La parte (iii) del teorema anterior nos dice que, para conocer (su distribucion) a una variablealeatoria es suficiente con conocer su f.g.p. Por otro lado, conociendo la distribucion de una variablealeatoria se determina su f.g.p.
Como un corolario del teorema anterior temenos el siguiente resultado.
Corolario 3.1.4 Sea X una variable aleatoria con funcion generadora de probabilidades G. En-tonces,
E(X) = G′(1).
Mas generalmente, el k-esimo momento factorial, µ(k), de X esta dado por
µ(k) := E[X(X − 1)(X − 2) · · · (X − k + 1)]
= G(k)(1).
En particular, del corolario anterior se sigue que
Var(X) = G(2)(1) +G′(1)− (G′(1))2 (3.1)
El siguiente resultado nos habla de la funcion generadora de probabilidades conjunta cuandohay independencia.
Teorema 3.1.5 Suponga que X y Y tienen funcion generadora de probabilidades conjunta G(s, t).Entonces, X y Y son independientes si y solo si G(s, t) = G(s, 1)G(1, t).
Demostracion: ⇒) Por definicion tenemos que
G(s, t) = E(sXtY
= E(sX)E(tY )
= G(s, 1)G(1, t),
donde la segunda igualdad es por independencia.⇐) Notemos que,
G(s, 1)G(1, t) =
(∑x
sxP(X = x)
)(∑y
tyP(Y = y)
)=
∑x
∑y
sxtyP(X = x)P(Y = y).
Por otro lado,
G(s, t) =∑x,y
sxtyP(X = x, Y = y).
Luego, para que se cumpla G(s, t) = G(s, 1)G(1, t) se debe tener que
P(X = x, Y = y) = P(X = x)P(Y = y), para todo x, y,
la ultima relacion en justamente la definicion de independencia.
28

Ejemplo 3.1.6 (Continuando con el Ejemplo ??) Una gallina pone X huevos, donde X es Poissoncon parametro λ. Cada huevo es fecundado con probabilidad p, independientemente de los otros.Sea Y en numero de huevos fecundados y Z los restantes. Demuestre que Y y Z son independientes.Solucion: Condicionalmente en X = x, Y ∼ Bin(x, p). Entonces,
E[sY |X = x] = (ps+ q)x.
Luego,
E(sY tZ) = E(sY tX−Y )
= EE[(s/t)Y tX |X]
= E
tXE[(s/t)Y |X]
= E[tX(p(s/t) + q)X ]
= E[(ps+ qt)X ].
Recordando que X es tiene distribucion Poisson temenos que
E(sY tZ) = expλ(ps+ qt− 1) = expλp(s− 1) expλq(t− 1),
usando el teorema anterior obtemos que Y y Z son independientes. Ademas, por unicidad, seobserva que Y ∼ Poisson(λp) y Z ∼ Poisson(λq).
Vamos a concluir la seccion con un resultado que sera muy ultil en lo que sigue.
Proposicion 3.1.7 Sean N y (Xi)i≥1 variables aleatorias, supongamos que N es no negativa yque, para cada i ≥ 1
E(sXi) = G(s),
es decir, las Xi‘s tienen la misma distribucion. Entonces, Z :=∑N
i=1Xi tiene funcion generadorade probabilidades
GZ(s) = Gn(G(s)).
Demostracion: Condicionando tenemos que,
E(sZ) = E[E(sZ |N)]
= E[E(sX1) · · ·E(sXN ])]
= E[G(s)N ]
= GN(G(s)).
29
3.2. Una breve introduccion a procesos de Galton-Watson
Supongamos que una poblacion de partıculas (moleculas, virus, etc.) evoluciona de la siguientemanera. La poblacion inicia al tiempo n = 0 con una partıcula, al tiempo n = 1 dicha partıculamuere y da oringen a un numero aleatorio (X) de partıculas identicas entre si y su progenitoray, a tiempos subsecuentes n = 2, 3, . . . , cada individuo evoluciona de la misma manera (muriendoy ramificandose) produciendo ası X partıculas cada uno. Supondremos que X tiene funcion deprobabilidades fX(k), k = 0, 1, 2, · · · . Ademas, vamos a suponer que el numero de partıculas queproduce cada individuo es independiente de los demas y que tiene la misma distribucion que X.Sea Zn el tamano de la poblacion al tiempo n, entonces Z = Zn : n ≥ 0 es un proceso estocasticoen cual, a cada tiempo, nos da el total de la poblacion.
Sea (Xni , n ≥ 0, i ≥ 1) un coleccion de variables aleatorias independientes todas con funcion de
probabilidades fX . Entonces, el proceso Z se puede describir de la siguiente manera, Z0 = 1 y
Zn+1 =Zn∑i=1
Xni , n = 0, 1, . . . , (3.2)
donde Xni representa el numero de descendientes que produce el i-esimo individuo presente en la
generacion n. Una consecuencia de la independencia de la coleccion (Xni ) y (3.2) es que el proceso
Z es una cadena de Markov a tiempo discreto, ver la Observacion ?? (i). El proceso Z es llamadoproceso de Galton-Watson1.
Proceso de Galton -Watson
b
b
b
b
b
b
b b
bbb
b bb b b b b
b
b b b
b b
b b
bb
b b b b
b
El proceso de Galton-Watson ha sido fuente de inspiracion para procesos de ramificacion muchomas generales, los cuales conforman un area de investigacion dentro de la teorıa de probabilidady procesos estocasticos por su riqueza en la variedad de modelos y su interaccion con otras areasde las matematicas.
A principios del presente capıtulo vimos que la funcion generadora de probabilidades es muyutil cuando se trabaja con variables aleatorias que toman valores en los enteros no negativos, que escaso del proceso de Galton-Watson. Supongamos que X tiene funcion generadora de probabilidadesG(s), |s| < 1. Entonces,
Gn(s) := E(sZn).
1Francis Galton propuso la pregunta sobre la probabilidad de extincion de apellıdos aristocraticos en Inglaterraen 1873 y Henry William Watson lo resolvio; y el 1874 escribieron el paper “On the probability of extinction offamilies”.
30

Notemos que G1(s) = G(s). Luego, por identidad (3.2) y la Proposicion 3.1.7 se tiene que para|s| ≤ 1
Gn+1(s) = Gn(G(s)) = G(Gn(s)), para todo n ≥ 1, (3.3)
es decir, Gn es la convolucion de G consigo misma n veces.
Proposicion 3.2.1 Supongamos que µ = E(X) y σ2 = Var(X). Entonces, para cada n ≥ 1,
E(Zn) = µn,
y
Var(Zn) =
nσ2, si µ = 1,
σ2µn−1 µn−1µ−1 , si µ 6= 1.
Demostracion: Sabemos que E(Zn) = G′n(s)|s=1. Entonces, de (3.2) y (3.3) se sigue que
E(Zn) = µE(Zn−1) = µG′n−1(1),
el resultado se sigue por induccion.Ahora vamos a demostrar la segunda afirmacion. Recordando que
Var(X) = G′′(1) +G′(1)− [G′(1)]2,
se tiene queσ2 = G(2)(1) + µ− µ2. (3.4)
Diferenciando dos veces en (3.3) y recordando que G(1) = 1, se obtiene
G(2)n (1) = G
(2)n−1(1)µ2 +G′n−1(1)G(2)(1).
Luego, el resultado se concluye usando la formula (3.1). En efecto, para µ = 1 se tiene
G(2)(1) = σ2,
yG(2)n (1) = σ2 +G
(2)n−1(1).
Procediendo de manera analoga obtenemos que
G(2)n (1) = σ2n, n ≥ 0.
Caso µ 6= 1, ver Ejercicio 5.
En general, hay muy pocos casos en los que se puede encontrar un expresion explıcita para Gn.Uno de ellos es el caso en que la ramificacion sigue una ley geometrica como lo muestra el siguiente
31

Ejemplo 3.2.2 (Ramificacion geometrica) Supongamos que G(s) = q(1 − ps)−1 (p + q = 1),|s| < 1
p, es decir, P(X = k) = qpk, k ≥ 0. En tal caso se tiene (Ver ejercicio ??)
Gn(s) =
n−(n−1)sn+1−ns , p = 1
2,
q[pn−qn−ps(pn−1−qn−1)]pn+1−qn+1−ps(pn−qn) , p 6= 1
2.
(3.5)
Una de las preguntas importantes acerca del proceso Z es conocer la probabilidad de extincional tiempo n, es decir, conocer P(Zn = 0) = Gn(0) ası como tambien lımn→∞ P(Zn = 0). En elpresente ejemplo se pueden encontrar de manera explıcita. En efecto, de (3.5) tenemos que
P(Zn = 0) =
nn+1
, p = q,q(pn−qn)pn+1−qn+1 , p 6= q.
Por lo tanto,
lımn→∞
P(Zn = 0) =
1, p ≤ q,qp, p > q.
Observacion 3.2.3 En el ejemplo anterior sabemos que E(Z1) = p/q ≤ 1 si y solo si p ≤ q.Luego, en tal caso, lımn→∞ E(Zn) = 0 ya que E(Zn) = [E(Z1)]
n. Lo cual nos indica que, de algunamanera, Zn tiende a cero cuando n tiene a infinito.
La propiedad anterior no es propia de caso geometrico como lo muestra el siguiente
Teorema 3.2.4 Se cumple que lımn→∞ P(Zn = 0) = η existe. Mas aun, η es la menor raız nonegativa de la ecuacion G(s) = s, 0 ≤ s ≤ 1.
Demostracion: Sea ηn := P(Zn = 0), y sea η la menor raız no negativa de de la ecuacion G(s) = s,0 ≤ s ≤ 1. Vamos a demostrar que ηn → η.
Consideremos los siguientes casos
1. Si fX(0) = 0, entoncesηn = Gn(0) = 0 = η.
2. Si fX(0) = 1, entoncesηn = Gn(1) = 1 = η.
3. Supongamos que fX(0) + fX(1) = 1 y fX(0)fX(1) 6= 0. Entonces,
ηn = Gn(0) = 1− P(Zn > 0)
= 1− [fX(1)]n
→ 1, cuando n→∞,
y en este caso η = 1.
32

4. Finalmente, supongamos que 0 < fX(0) < fX(0) + fX(1) < 1. Notemos que
Zn = 0 ⊂ Zn+1 = 0,
entoncesηn = P(Zn = 0) ≤ P(Zn+1 = 0) = ηn+1.
Luego, (ηn) es una sucesion creciente y acotada, y por lo tanto es convergente. Sea λ :=lımn→∞ ηn.
Por otro lado, sabemos que Gn+1(0) = G(Gn(0)), entonces
ηn = G(ηn),
en consecuencia si hacemos n tender a infinito, por continuidad se sigue que
λ = G(λ).
Para concluir la prueba debemos demostrar que λ = η. Notemos que,
η1 = G1(0) = G(0) ≤ G(η),
yη2 = G2(0) = G(G(0)) = G(η1) ≤ G(η) = η.
Procediendo inductivamente obtenemos que ηn ≤ η, entonces λ ≤ η. Ahora bien, porhipotesis η es la menor raız no negativa de la ecuacion G(s) = s, 0 ≤ s ≤ 1. Entonces,λ ≥ η. Concluyendo ası que
λ = η.
Puede demostrarse que η = 1 si E(X) < 1 y η < 1 si E(X) > 1. Si E(X) = 1, entonces η = 1siempre que Var(X) > 0, es decir, siempre que X no sea constante con probabilidad 1.
33

3.3. Ejercicios
1. Sean X y Y variables aleatorias con valores en los enteros no negativos, con funcion deprobabilidades conjunta dada por
fX,Y (i, j) = (1− α)(β − α)αjβi−j−1, 0 ≤ i ≤ j,
donde 0 < α < 1 y α < β son parametros dados.
(a) Encuentre la funcion generadora de probabilidades conjunta del vector (X, Y ).
(b) Encuentre Cov(X, Y ).
2. Dado 0 < p < 1, considere la funcion
f(k) =(1− p)p|k|
1 + p, · · · ,−2,−1, 0, 1, 2, · · · .
(a) Verifique que f es una funcion de probabilidades de alguna variable aleatoria X.
(b) Encuentre la funcion generadora de probabilidades de X.
(c) Encuentre la media y la varianza de X.
3. Sean X1, X2, · · · variables aleatorias independientes e identicamente distribuidas todas condistribucion logarıtmica, es decir,
P(X = k) =(1− p)k
k log(1/p), k ≥ 1,
donde 0 < p < 1. Suponga que N es independiente de las Xi’s y tiene distribucion de Poissoncon parametro λ.
(a) Demuestre que Y :=∑N
i=1Xi tiene distribucion binomial negativa. ¿Cuales son losparametros?
Sugerencia: recuerde que log(x) = (x− 1)− (x−1)22
+ (x−1)33
+ · · · .(b) Encuentre la esperanza de Y .
4. Sea X una v.a. no-negativa con funcion generadora de probabilidades GX(s) tal que G′X(1) <∞. Demuestre que
G(s) =1
E(X)
1−GX(s)
1− ses la funcion generadora de probabilidades de alguna variable aleatoria Y . ¿Cuando se tieneque G(s) = GX(s)?
5. En la Proposicion 3.2.1 demuestre la relacion para la varianza en el caso µ 6= 1.
6. En Ejemplo 3.2.2, para el caso p = 12, demuestre que
Gn(s) := E(Zn) =n− (n− 1)s
n+ 1− ns.
34

7. Sea Z := Zn, n ≥ 0 un proceso de Galton-Watson con Z0 = 1, E(Z1) = µ > 0 y Var(Z1) >0. Demuestre que E(ZnZm) = µn−mE(Z2
m), m ≤ n. Luego, encuentre ρ(Zn, Zm) en terminosde µ, donde ρ(X, Y ) denota el coeficiente de correlacion entre X y Y .
8. Sea Z como en el ejercicio anterior y Gn la funcion generadora de probabilidades de Zn.
(a) Encuentre una expresion para Gn cuando la funcion generadora de Z1 esta dada porG1(s) ≡ G(s) = 1− α(1− s)β, 0 < α, β < 1.
(b)Encuentre P(Z1 = k), k = 0, 1, . . . .
9. Sea Z un proceso de Galton-Watson donde X (el numero de descendientes) es tal que P(X =0) = 2/5 = 1− P(X = 2). Encuentre la probabilidad de extincion de Z.
35
Bibliografıa
[1] Caballero, M. E.; Rivero, V. M. Uribe Bravo, G.; Velarde, C. Cadenas de Markov. Unenfoque elemental Aportaciones Matematicas: 29. Sociedad Matematica Mexicana, Mexico,2004. iv+117 pp. ISBN 970-32-2189-0
[2] Fisher, R. A. The Genetical Theory of Natural Selection. Oxford (Claredon) Press. Londonand New York. (1962).
[3] Karlin, S. and Taylor, H. An introducction to Stochastic Modelling. Boston: Academic PressInc. (1998).
[4] Ross, S. M. Introduction to probability models. Academic Press. 8th Edition. (2003).
[5] Stirzaker, D. Elementary probability. Cambridge University Press. (1994).
36