ecualizadorpasivo
DESCRIPTION
presentacionTRANSCRIPT

Diagramas de Bode a partir de la función de transferencia.
Objetivo: Estudio del comportamiento en frecuencia de un circuito.
Tipo de circuito: Consideramos circuitos alimentados por fuentes sinusoidales (régimen permanente sinusoidal).
Razón: Cualquier función puede escribirse como suma de funciones sinusoidales (desarrollo de Fourier).
Aplicaciones: Análisis de filtros, sintonizadores, amplificadores, etc.
α factor de amplificación (igual para cada componente)
Filtros básicos:
Conceptos importantes:
o Resonancia y su relación con la selectividad.o Factor de calidad (Q).o Ancho de banda y frecuencia de corte.
1.1 Análisis en frecuencia de la función de transferencia. Diagrama de Bode.
Ejemplos de funciones de transferencia:

Para cualquier función de transferencia:
La representación de H(ω) implica 2 gráficas (módulo |H(ω)| y fase ((ω)). Son magnitudes reales → tienen significado físico.
Forma de H(ω): Cociente de dos polinomios en ω (jω)
Factorizando los polinomios:

Representaremos el módulo y la fase de H(ω) factorizada
Por comodidad, se escoge una representación logarítmica:
Módulo:
EJE Y: A(dB)=20log(|H(ω|) (decibelios)
EJE X: ω en escala logarítmica
FASE:
eje Y: [H(ω)] en escala lineal
eje X: ω en escala logarítmica

(gráfica semilogarítmica)
Cada una de estas representaciones gráficas representa el Diagrama de Bode de Módulo y de Fase, respectivamente.
Aplicando logaritmos podemos representar el módulo de H(ω) como suma y diferencia de factores.
Utilidad de los diagramas de Bode:
Representación gráfica del comportamiento en frecuencia de un circuito.
Permiten representar un rango de ω mucho mayor. Cuando los polos y ceros de H(ω) son reales (o están muy cerca del eje R), la gráfica de |H(ω)| y ([(ω)] se puede aproximar fácilmente por tramos lineales.
1.2 Representación de la amplitud y fase de términos elementales de H(ω).
MÓDULO:
FASE:
Ni(ω) y Dk(ω) siempre serán de algunas de estas 4 formas:

Diagrama de Bode de estos casos particulares:
1. Ni (w)= K real
Módulo: A(db)=20Log|K| cte. recta horizontal
2. Ni(w) = jw
El signo + corresponde al término jw en el numerador, y - si está en el denominador.

3. Ni (w)= (1+jw/d)
No se puede representar por un único tramo recto ya que tiene un comportamiento distinto a bajas y a altas .

Precisión de las aproximaciones:
Son los puntos de mayor error. El diagrama de Bode es una aproximación por asíntotas, no es la curva exacta de H(w).

1.2.1 Relación entre octava y década
Una década corresponde a multiplicar por 10 la frecuencia.
Una octava corresponde a doblar la frecuencia (origen en las notas musicales).
1.3 Composición gráfica de H(w).
Para representar H(ω) sumaremos gráficamente las contribuciones individuales de cada factor.
Ejemplo 1:
1. Representar cada término.2. Identificamos regiones en cada cambio de pendiente.3. Empezamos por la región más a la izquierda sumando las contribuciones de cada
término.

Módulo:

Fase:
Ejemplo 2:
Polos y ceros no coincidentes con las décadas.

Módulo:
Fase:
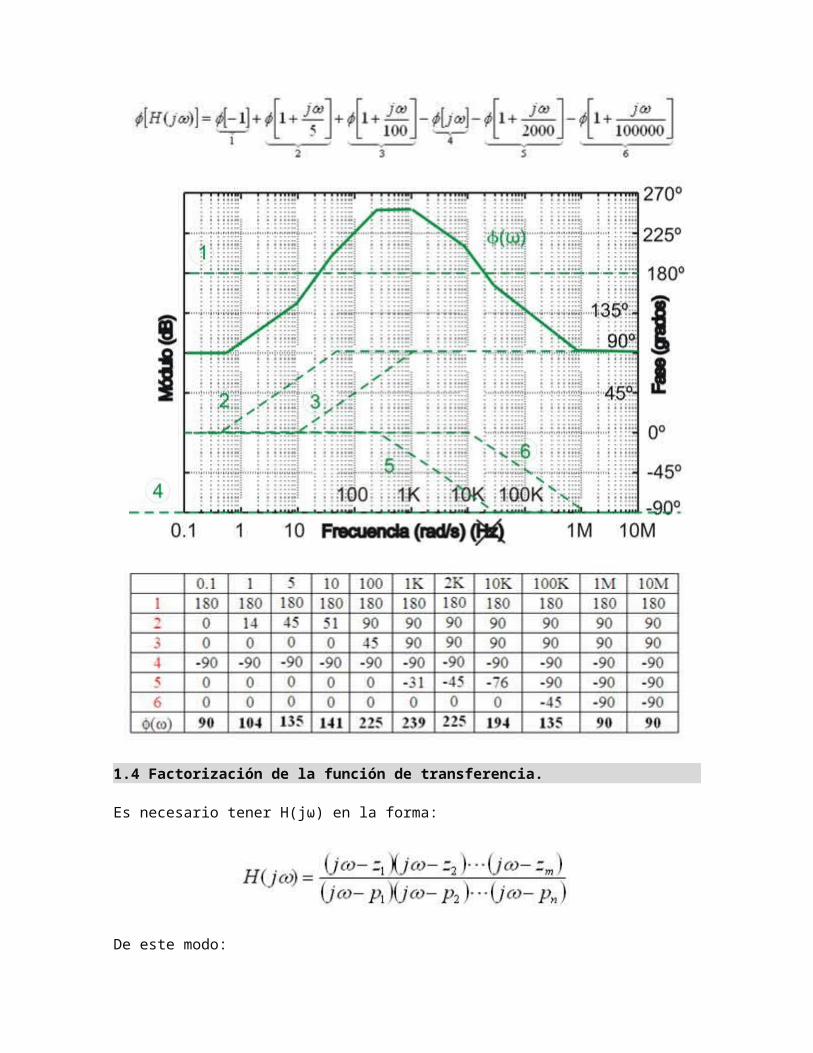
1.4 Factorización de la función de transferencia.
Es necesario tener H(jω) en la forma:
De este modo:

Pasos para factorizar:
1. Hacer el cambio de variable s=jω2. Determinar los ceros y polos de H(s)3. Expresar H(s) factorizado4. Se deshace el cambio de variable s→jω5. Representar H(jω)
Nota:
Ejemplo 3:
Por tanto:
Nos interesa factores de la forma: (1+jω/d)

Términos a representar:
1. K=10 término cte.2. (1+jw) cero simple3. jw polo en el origen.4. (1+jw/10) polo simple5. (1+jw/100) polo simple
Módulo:

Fase:

1.5 Polos y ceros cuadráticos.
Términos en el numerador o en el denominador de la forma:
Factorizamos:
Raíces:
Tres casos:

Representación del término cuadrático


1.6 Corrección del diagrama de Bode (módulo).
Término simple
El mayor error se dará en los puntos:
Término cuadrático

Podemos localizar 4 puntos significativos alrededor de ω=d

Ejemplo 4:
Representación del diagrama de Bode real de H(ω)

Representación de módulo:
Correcciones a la aproximación:

Función de atenuación. Ancho de banda y frecuencia de corte: Concepto de filtro.
Filtro: Circuito cuya respuesta en frecuencia se adecua a unas especificaciones que pueden referirse a la amplitud y/o la fase.
2.1 Clasificación de filtros según su respuesta en amplitud.
Filtro paso bajo:

Filtro paso bajo ideal deja pasar las frecuencias por debajo de (c.
c es la frecuencia de corte.
Cálculo de la frecuencia de corte:
Filtro paso alto:
Cálculo de la frecuencia de corte:
Filtro pasabanda:

Filtro rechaza banda:
Filtro paso todo:

2.2 Parámetros característicos de un filtro.
Frecuencia de corte: por encima (o debajo) de la cual la señal se atenúa en 3dB (filtro real) o completamente (filtro ideal).
Banda de paso: intervalo de frecuencias para las que la respuesta en amplitud es la unidad (o está por encima de 1/√2 en filtro real)
Banda atenuada: intervalo de frecuencias para las que la respuesta en amplitud es nula (filtro ideal) o está por debajo de 1/√2 en filtro real
Orden de un filtro: es el grado del polinomio del denominador de la función de transferencia H(s).
El orden del filtro determina la pendiente máxima en dB/dec de la atenuación.
n=1 -20dB/dec
n=2 -40dB/dec
n=3 -60dB/dec
Filtro ideal: atenuación con pendiente infinita (n→∞)
2.3 Tipos de filtros según los componentes.
Filtros activos: usan circuitos integrados, generalmente Amplificadores Operacionales.
Aplicaciones comunes: audio, ya que presentan mucha atenuación a alta frecuencia.
Filtros pasivos: usan componentes pasivos R, C. L.
Aplicaciones: potencia y alta frecuencia.
iltros elementales de 2º orden.
Expresión general de H(s):

En este tipo de filtros además del paso bajo y paso alto podremos implementar filtros paso banda y rechaza banda.
Gracias a la resonancia podremos tener ganancias G>1 incluso en filtros pasivos.
Aplicaciones: sintonización selectiva de frecuencias en sistemas de comunicaciones y control.
4.1 Relación entre la respuesta en ω y la respuesta en el tiempo en los circuitos de 2º orden.
Determinaremos los polos de H(s), donde H(s) → ∞:
Tipos de polos obtenidos:
Reales y distintos si:

Reales e iguales si:
Complejos conjugados si:
Relación con la respuesta en el dominio del tiempo:
Tres casos estudiados:

4.2 Filtro paso bajo.
Forma general de la función de transferencia:
Respuesta en amplitud:

Respuesta en fase:
Frecuencia de corte (ωC):
La frecuencia de corte del filtro depende del valor de Q.
Para calcular ωC hay que despejar de:
Filtro paso bajo pasivo:

Parámetros del filtro:
4.3 Filtro paso alto.
Forma general de la función de transferencia:
Se suele expresar también como:
Respuesta en amplitud:

Respuesta en fase:
Filtro paso alto pasivo:

Parámetros del filtro:
Filtro paso alto activo:
Filtro de Sallen-Key de ganancia unidad
Parámetros del filtro:

4.4 Filtro paso banda.
Forma general de la función de transferencia:
Se suele expresar también como:
Respuesta en amplitud:

Respuesta en fase:

Cálculo de las frecuencias de corte:
Se obtienen 2 ecuaciones de 2º grado:
Como las frecuencias ω son positivas nos quedamos con la solución > 0:

Frecuencias de corte de un filtro paso banda de 2º orden:
Frecuencia de corte superior:
Frecuencia de corte inferior:
No hay simetría en torno a la frecuencia de resonancia wO:
Ancho de banda (BW):
NOTA:
A mayor Q, menor BW ↔ filtro más selectivo.

Ejemplos de filtros paso banda pasivos:

Identificando términos:
Parámetros del filtro:


Filtro paso banda activo:
4.5 Filtro rechazo banda.
Forma general de la función de transferencia:

Se suele expresar también como:
Respuesta en amplitud:
Respuesta en fase:

Ejemplos de filtros rechazo banda pasivos:


Diagramas de Bode de filtros rechazo banda de 2º orden:

Diseño de filtros por el método de la aproximación.
Objetivo: Aprender a diseñar filtros de orden n (cualquiera) que cumplan determinadas especificaciones.
Esquema a seguir:
Especificación de las características del filtro → ver formas de indicar estas especificaciones.
Elección del tipo estándar de filtro. Existen distintos tipos:
o Butterwortho Chebyshevo Inversa de Chebyshev, Bessel, elípticos, etc.
Uso de las tablas de filtros estándar → Buscar los valores de los componentes del filtro (Cs, Ls y Rs). Valores normalizados (ω=1 rad/s y R= 1Ω, filtro prototipo) de los componentes en las tablas.
5.1 Especificación de las características de un filtro.

Relación entre atenuación y amplitud:
Especificaciones de un filtro paso bajo:
Especificaciones de atenuación:

Especificaciones de un filtro paso alto:
Especificaciones de un filtro paso banda:
Especificaciones de un filtro rechazo banda:
NOTA: En el diseño de filtros por el método de la aproximación siempre consideraremos especificaciones de filtro paso bajo. Para diseñar otro filtro (pasa alto, pasa banda, etc) se realizarán transformaciones de las especificaciones.
Parámetros de discriminación y selectividad de un filtro.
Parámetro de discriminación (Kd) :

Parámetro de Selectividad (Ks):
NOTAS:
Kd pequeño → filtro paso bajo de alta calidad.
Ks ~1 corresponde a un filtro pasa bajo casi ideal.
Función característica F(ω 2 ):

5.2 Filtro de Butterworth.
Definido siempre para el filtro paso bajo.
Características de su respuesta:
Función característica:
Su comportamiento:
Respuesta plana en la banda de paso. Caída de 20n dB/década en la banda atenuada. Filtro caracterizado por los valores de ωc y n.
Diseño de un filtro de Butterworth:
Tenemos que encontrar ωc y n que satisfagan las especificaciones.
Especificaciones:
1. Cálculo del orden del filtro de Butterworth (n).
Debe cumplir:

Si n no es entero redondearemos al siguiente n que asegure el cumplimiento de especificaciones.
2. Cálculo de la frecuencia de corte (ωc) del filtro de Butterworth.
Imponiendo que el filtro pase por la esquina (ωp, Hp):
Bode de amplitud de filtros Butterworth de orden creciente:

5.3 Filtro de Chebyshev.
Definido siempre para filtro paso bajo.
Características de su respuesta:
Función característica:
Definición de los polinomios de Chebyshev:
Obtenidos de forma recurrente:

Su comportamiento:
Respuesta con rizado en la banda de paso.
Filtro caracterizado por los valores de ε y n.
Dado el orden del filtro (n), a mayor rizado permitido en la banda de paso, mejor selectividad en frecuencia.

Diseño de un filtro de Chebyshev
Tenemos que encontrar ε y n que cumplen las especificaciones dadas.
Especificaciones:
1. Cálculo del orden del filtro de Chebyshev (n).
Debe cumplir:
Si n no es entero redondearemos al siguiente n que asegure el cumplimiento de especificaciones.
2. Cálculo del parámetro de rizado (ε) del filtro de Chebyshev.
Imponiendo que el filtro pase por la esquina (ωp,Hp):

Si nos dan el rizado ε → podemos deducir Hp.
Comparación Butterworth-Chebyshev
Los Chebyshev decaen más rápidamente que los Butterworth. Los Butterworth se comportan mejor en la banda de paso.
5.4 Implementación de filtros de Butterworth y Chebyshev.
Filtros Butterworth y Chebyshev solo paso bajo.
ACTIVOS (paso bajo):
Filtro de 2º orden (n=2)

Filtro de 3º orden (n=3)
Filtro de 4º orden (n=4)
Son filtros Sallen-Key conectados en cascada. Estos circuitos implementan la respuesta de Butterworth o Chebyshev según el valor de sus componentes.
PASIVOS (paso bajo):
Filtro en escalera.

(a) Circuito con mínimo número de inductancias.
(b) Circuito con mínimo número de condensadores.
En orden del filtro lo determina el número total de elementos almacenadores de energía (condensadores+inductancias).
5.4.1 Uso de tablas para el diseño de filtros paso bajo.
Conocido el tipo del filtro (Butterworth o Chebyshev; activo o pasivo) que deseamos implementar, el valor de los componentes se obtiene de las tablas.
Tablas filtros activos.
A estos filtros se les conoce como filtros paso bajo activos prototipo o normalizados.
Como nuestra frecuencia wc o wp no será de 1rad/s y no usaremos resistencias de 1Ω debemos aplicar una ley de escalamiento (en frecuencia e impedancia) a los valores de la tabla.
Ley Universal de Escalamiento para filtros activos
Tablas filtros pasivos.
Lo primero que tenemos que decidir es si vamos a utilizar una estructura con el mínimo número de condensadores o de inductancias.
Butterworth: Conocido n y wc, la tabla muestra los valores de Cs y Ls para wc= 1rad/s y RL= 1Ω.

Chebyshev: Conocido n y ε, la tabla muestra los valores de Cs y Ls para wp= 1rad/s y RL= 1Ω, para un rizado determinado.
A estos filtros se les conoce como filtros paso bajo pasivos prototipo o normalizados.
Para obtener un filtro con la frecuencia que nos interesa y valores "razonables" de componentes tendremos que aplicar otra ley de escalamiento.
Ley Universal de Escalamiento para filtros pasivos
5.6 Criterios de diseño para otros tipos de especificaciones.
Transformación de paso bajo a paso alto.
En la función de transferencia equivale a sustituir:
s →1/s
Ejemplo:
Esta transformación se produce al sustituir Rs por Cs de valor 1/R y Cs por Rs de valor 1/C (transformación RC-CR de Mitra) en el filtro paso bajo activo prototipo .

Esta transformación equivale en el filtro paso bajo pasivo prototipo a sustituir Ls por Cs de valor 1/L y Cs por Ls de valor 1/C.
Transformación de paso bajo a paso banda.
En la función de transferencia equivale a sustituir:
Esta transformación equivale a poner en cascada dos filtros activo prototipo.
Esta transformación se obtiene sustituyendo en el filtro paso bajo pasivo prototipo:

Transformación de paso bajo a rechazo banda.
En la función de transferencia equivale a sustituir:
Esta transformación equivale a poner en paralelo dos filtros activo prototipo.
Esta transformación se obtiene sustituyendo en el filtro paso bajo pasivo prototipo:

5.7 Escalado en frecuencia e impedancia.
Permite reutilizar un filtro diseñado modificando las frecuencias de corte o los valores de las resistencias empleadas
Escalado en frecuencias:
Deseamos multiplicar la frecuencia característica de un filtro por una constante α.
Si la frecuencia del filtro ω pasa a ser αω, debemos modificar el valor de los componentes utilizados para no variar otras características del filtro.
En filtros pasivos:
ω → αω
C → C/α
L → L/α
En filtros activos (sólo hay resistencias y condensadores):
Se escalan sólo los valores de R o los valores de C
ω → αω
C → C/α ó R → R/α
Escalado de impedancias:
Deseamos mantener la frecuencia de corte pero utilizar los componentes disponibles (utilizar otros valores de impedancias).
Si disponemos de resistencias de valor βR en lugar del valor R del diseño, debemos modificar el valor de los otros componentes utilizados para no variar las características del filtro.

Si R → βR
C → C/β
L → βL
Ejemplo del uso de escalados:
El siguiente circuito es un filtro paso bajo de Chebyshev con las siguientes características:
Se desea convertirlo en un filtro pasa alto con las mismas características pero con una fp de 10 Khz y unos valores de resistencias "razonables" del orden de KΩ.
1. Primero se convierte en un filtro paso bajo normalizado en frecuencia ωp= 1 rad/s.
α=1/(2π1000)=0.159·10-3
Para reducir la frecuencia, aumentaremos el valor de las resistencias o condensadores en la misma proporción. En este caso es más cómodo modificar las resistencias.
En el caso de filtros pasivos aumentaríamos al mismo tiempo los valores de los condensadores e inductancias.
2. Transformamos a pasa alto normalizado en frecuencia ωp= 1 rad/s mediante las transformaciones R↔C de Mitra.

3. Hacemos un escalado en frecuencia para pasar el filtro pasa alto de una ωp= 1 rad/s a una fp de 10 Khz (ω'p= 2π10000 rad/s).
α= 2π10000/1= 62893
Podemos disminuir (dividir por α) el valor de las resistencias o de los condensadores. Como las resistencias quedarían muy pequeñas, optamos por reducir el valor de los condensadores.
4. Como los valores de las resistencias son muy elevadas las reduciremos mediante un escalado en impedancias. Como no deseamos que fp varíe si disminuimos las resistencias tendremos que aumentar en la misma relación los condensadores (en este caso 1000).

Ecualizador
Tabla de ecualizador para grabaciones
Un ecualizador es un dispositivo que modifica el volumen del contenido en frecuencias de la señal que procesa. Para ello modifica las amplitudes de sus coeficientes de Fourier, lo que se traduce en diferentes volúmenes para cada frecuencia. Con esto se puede variar de forma independiente la intensidad de los tonos básicos.
Ciertos modelos de ecualizadores gráficos actúan sobre la fase de las señales que procesan, en lugar de actuar sobre la amplitud.
Foto de un ecualizador avanzado
De un modo doméstico generalmente se usa para reforzar ciertas bandas de frecuencias, ya sea para compensar la respuesta del equipo de audio (amplificador + altavoces) o para ajustar el resultado a gustos personales.
Los hay analógicos y digitales, activos o pasivos,paramétricos, gráficos y paragráficos. Los ecualizadores profesionales suelen tener, al menos, 10 bandas. Las normasISO establecen que las bandas de frecuencia han de ser, al menos, 31, 63, 125, 250, 500, 1000, 2000, 4000, 8000 y 16 000 Hercios.
Estas bandas de frecuencias básicas son controladas por un fader (u otro potenciómetro o control alternativo) que puede atenuar o introducir ganancia hasta en 12 dB, o aún más. Para evitardistorsión por saturación ("clipping"), cada fader cuenta con un diodo LED, que se enciende justo antes de que se recorte la señal.
Los ecualizadores están muy relacionados con los mezcladores ecualizadores y mezcladores.
Ecualizador paramétrico
El ecualizador paramétrico es un ecualizador que permite el control individual de tres parámetros por cada banda: su frecuencia central, su ganancia, y su ancho de banda.
Un ecualizador similar es el semi-paramétrico, que sólo presenta el control individual de dos parámetros (generalmente frecuencia central y ganancia), mientras que el tercero es fijo.
Éstos controlan los tres parámetros fundamentales, que son el ancho de banda, la frecuencia central y la amplitud de la señal. El manejo de éstos es más complejo, ya que hay que ajustar todos los parámetros.

Lo ideal en un ecualizador paramétrico es tener cuatro bandas de frecuencias sobre las que actuar, bajas frecuencias (20 a 250Hz), media baja (250 a 2.000Hz), media alta (2000 a 4.000Hz) y altas (4.000 a 16.000).
Si modificamos cualquier frecuencia también modificamos su respuesta de fase. Imaginen entonces una ecualización importante en varias frecuencias a la hora de sonorizar un evento, la respuesta de fase del sistema se vería fuertemente alterada. Esto es debido al efecto que producen los filtros sobre la fase, recordemos que un ecualizador gráfico no es más que un conjunto de filtros pasa-banda.
Por ello, si el sistema de sonido esta bien ajustado, no hará falta tocar el ecualizador gráfico, y por este motivo observamos que la mayoría de ecualizadores gráficos en los conciertos en directo están totalmente planos.
Uso práctico
Utilización práctica de un ecualizador paramétrico para corregir instrumentos musicales También hay que apuntar que estas ecualizaciones dependen mucho del gusto artístico del técnico de sonido y/o instrumentista que para determinados estilos musicales buscan una exageración de niveles en determinadas frecuencias.
En el caso del bombo de una batería, las frecuencias producidas bajan hasta 40Hz, así que para controlar mejor el ataque deberemos acentuar o atenuar alrededor de 63Hz, de hecho, muchos micrófonos concebidos para bombos presentan una ligera cresta en esta frecuencia. Algunas de las frecuencias más molestas suelen estar en la zona de 300 y 400Hz.
Las guitarras eléctricas ocupan un amplio margen de frecuencias que comienza alrededor de los 80Hz. Si suenan demasiado sordas podemos atenuar sobre los 200Hz, mientras que si son demasiado duras atenuaremos sobre los 1000Hz; para las guitarras acústicas deberemos estar atentos en la zona comprendida entre 200 y 600 HZ.
La voz cantada contiene un amplio rango de frecuencias, siendo las frecuencias comprendidas entre 2 y 4KHz el lugar donde tenemos más inteligibilidad. Recordemos que, según las curvas de Fletcher y Munson, esta parte del espectro es la más sensible para nuestro oído. Podemos observar cómo muchos micrófonos para voces tienen una cresta a partir de 5KHz.
Compresor (sonido)
Compresor
En el campo del sonido profesional, un compresor es un procesador electrónico de sonido destinado a reducir elmargen dinámico de la señal sin que se note demasiado su presencia. Esta tarea, se realiza reduciendo la ganancia del sistema, cuando la señal supera un determinado umbral.
Tradicionalmente han sido equipos electrónicos de una o dos unidades de rack, pero desde hace algunos años han aparecido versiones "software" de los mismos.
Un compresor actúa de forma que atenúa la señal eléctrica en una determinada cantidad (medida normalmente en decibelios) y a partir de un determinado nivel de entrada. El

objetivo es conseguir que la excursión dinámica resultante sea inferior a la original, proteger ciertos equipos frente a los posibles picos de señal o si se trata de un sonido saturado intentar disimular el error.
Razones para comprimir una señal[editar]
Controlar la energía de la señal : El oído humano es muy sensible, por lo que la compresión debe ser suave y sutil para no captarla. Este tipo de compresión se utiliza cuando se tiene una señal en la que la intensidad varía, por lo que se comprime para conseguir una señal más constante dentro de los valores que se le asigne.
Controlar el nivel de pico de la señal : A menudo los equipos están limitados, por lo que los amplificadores pueden saturar y por lo tanto dañarse. En este caso la compresión se utiliza para controlar la señal y así proteger al equipo.
Reducir el margen dinámico de la señal : Al atenuar los picos de una señal, reducimos su rango dinámico. Muchos equipos están limitados por los picos, y esto permite subir el nivel de RMS de la señal.
Usos del compresor
En el campo de la música, su uso va desde aplicaciones para grabaciones musicales al sonido directo. Por ejemplo, es frecuente su uso para añadir más pegada al sonido, efecto que se consigue comprimiendo la señal para posteriormente aplicar una ganancia a la salida del aparato, lo cual suele disimular los posibles fallos de interpretación por parte del artista, al menos en cuanto al control dinámico se refiere. Un compresor es muy recomendable (y con ciertos estilos musicales, indispensable) para cuando se utiliza un bajo eléctrico. El efecto de "slapping" (golpear las cuerdas con el dedo) produce picos de salida extremadamente altos (20dB o 10 veces más que lo normal), que a bajos niveles de salida generan distorsión, y en altos volúmenes (como en recitales) pueden producir serios daños al amplificador, e incluso alaltavoz (un exceso de "excursión" puede hacer que el altavoz se desgarre de su suspensión). Incluso en el caso (teórico) de un sistema musical con un rango dinámico infinito, la diferencia, auditivamente hablando, utilizando o no el compresor es imperceptible. También es muy frecuente su uso en voces, ya que no todos los cantantes utilizan la técnica adecuada por lo que el nivel de señal varía constantemente.
Se utiliza mucho en radiodifusión, para mejorar la dicción del locutor.
Comprimir durante la masterización mejora la definición al sonido de la mezcla final.
Para proteger los equipos (altavoces).
Parámetros de compresión[editar]
Principalmente disponemos de cuatro parámetros de compresión:
Umbral (Threshold): El compresor trabaja con base en un umbral. Cuando la señal sobrepasa ese umbral se llevará a cabo la compresión, reduciendo el nivel a la cantidad programada con anterioridad. Cuanto más bajo sea el umbral, una mayor

parte de señal está siendo procesada. Debemos tener en cuenta, que un umbral por encima del nivel de clip del sistema es inútil. Equivale a poner el compresor en bypass. El rango eficaz de este control, es de -40 dBu a + 20 dBu.
Proporción (Ratio): Representa la reducción de la ganancia bajo las condiciones señaladas. Una proporción de 2:1, por ejemplo, significa que una vez que el nivel de la señal excede el umbral, se le permite al nivel de señal aumentar 1 dB por cada 2 dB de aumento de la entrada. Una relación de 8:1 ó mas, se le considera un "limitador".
Ratio de compresión
.
Tiempo de ataque (Attack time): Es el tiempo que tarda una señal en comprimirse desde que sobrepasa el nivel del umbral. En un buen compresor con tiempo de ataque ajustable, tendremos una gama de ajuste de 500 microsegundos (µs) a 100 milisegundos (ms). Si el ataque es muy rápido, la ganancia de la señal será reducida, dará la sensación de como si hubiera ocurrido una caída de señal. Si el ataque es muy lento, entonces la señal se distorsionará porque el compresor no tiene tiempo para reducir la ganancia.
Attack y Release time
Tiempo de decaimiento (Release time): Es el tiempo que tarda el compresor en anular el control una vez pasada la sobrecarga. Si el tiempo de liberación es corto, la ganancia volverá a su estado original rápidamente creando un desbalance de niveles. Si es largo, el compresor seguirá actuando cuando aparezca la siguiente señal. Un tiempo corto de liberación de 100 a 500 ms, es un buen inicio para voz hablada, mientras que los tiempos más largos son mejores para la música instrumental. El rango de ajuste varia entre los 100 ms y los 3 seg.
Rótula (Knee): En algunos compresores existe la opción entre una transición suave (soft knee) o algo más brusca (hard knee). Para solucionar el cambio brusco de señal

se utiliza el soft knee. Lo que produce es un control de nivel más estable, porque la relación de compresión se incrementa gradualmente al valor ajustado, en lugar de aplicarlo abruptamente. El hard knee se utiliza para tener un mayor control sobre los sonidos percusivos o instrumentos con ataque rápido.
Control de ganancia (Gain control): Se utiliza para ajustar o compensar el nivel de salida de la señal de audio después de ser comprimida. Este control, por lo general, oscila entre -15 a 20 dB. Un aspecto muy importante a tomar en cuenta, es que al enfatizar la señal de audio con el parámetro "Gain Control", lleva consigo el ruido de fondo, por esta razón en la mayoría de los casos enfatizar con exceso la señal de audio no es lo más adecuado.
Compresión paralela o "New York"
La compresión paralela o New York tiene como objeto suavizar la dinámica de la señal o pista de audio sobre la que se aplica, pero sin perder pegada. Los instrumentos de percusión van a ser los principales usos para esta técnica. El principio es bien sencillo, se trata de mezclar una pista sin procesar junto con otra a la que aplicaremos un tratamiento de compresión bastante severo. Se utilizarán los siguientes parámetros:
Valores de threshold (umbral) bastante bajos, entre - 40, -45, -50 dependiendo de la señal.
Valores de ratio pequeños 2:1, 2.5:1, 3:1
Valores de ataque muy rápidos que frenen inmediatamente cualquier pico
Valores de relajación o release largos, por ejemplo, 800-1000 ms
Cuando subimos el nivel de la señal de entrada, la señal sin comprimir adquiere más fuerza o pegada dentro del contexto de la mezcla. Los picos transitorios van a seguir apareciendo y las partes más suaves se ven beneficiadas porque aumentan de volumen y adquiren más cuerpo. Recordad que este tipo de compresión puede dar lugar a resultados desastrosos con configuraciones extremas, para empezar con este tipo de compresión, usen los valores que he puesto como ejemplo anteriormente. Para aquellos que experimentan problemas de compensación de retardos en sus plugins (que obviamente introducen problemas de fase) pueden aplicar un truco que es infalible, Se trataría de insertar el mismo pluging de compresión en el canal que no vamos a procesar, ajustanto el parámetro de ratio en 1:1. Con esto conseguimos equilibrar los retardos en las pistas y evitamos los tan odiados problemas de fase.
Marcas relevantes
Entre las marcas más relevantes se destacan:
API Audio Avalon Behringer Crane Song DBX Drawmer

Elysia Empirical Labs FMR Audio Focusrite Inmueble Dynamics JoeMeek Klark Teknik Manley Rupert Neve Designs Samson SPL SSL TC Electronic Tube-tech Universal AudioDelay
Pedal de delay.
Delay (inglés: retraso) es un efecto de sonido que consiste en la multiplicación y retraso modulado de una señal sonora. Una vez procesada la señal se mezcla con la original. El resultado es el clásico efecto de eco sonoro.
Retraso: es el tiempo que tarda en producirse un eco, suele medirse en milisegundos o estar sincronizado con un tempo.
Feedback o retroalimentación: es la cantidad de veces que se repite la señal sonora pudiendo ser cualquier valor entre una e infinito.
Mezcla: es la cantidad de sonido retrasado que se mezcla con el original.
Estos son los parámetros básicos de cualquier módulo de delay, pero no son los únicos posibles. En módulos más avanzados se pueden encontrar controles como la caída de frecuencias en el tiempo, ajustar varios ecos diferentes, sincronización MIDI, filtrado de frecuencias.
Existen multitud de modelos diferentes de delay, tanto en forma de módulo analógico, como en forma de módulo digital, pero la mayor creatividad se encuentra en los módulos de delay softwaredisponibles para diversas plataformas (VST, DX, RTAS, AudioUnit etc).
Delays síncronos[editar]

Un Delay síncrono, o sincrónico, es aquel cuyo retraso corresponde a una fracción entera deltempo. Para calcular un delay síncrono se sigue la siguiente fórmula:
Siendo D el retraso en milisegundos, T el tempo expresado en negras por minuto y n el denominador de la unidad de duración relativa a una redonda (ej.: 4 para una negra, 8 para unacorchea, 16 para una semicorchea, etc).
Phaser
Efecto de sonido phaser
MENÚ
0:00
Una muestra corta, de cuerda sin procesar, seguida por unos pocos efectos diferentes de phasing en la misma muestra
Espectrograma de un phaser de 8 etapas modulado por un seno LFO aplicado al ruido blanco.
Phaser es un procesamiento digital de audio que produce un efecto de sonido similar al flanger. La señal se dobla y luego se le aplica un retraso. Al sumarla con la señal original se produce un efecto phasing de modulación entre una señal y la otra. La diferencia principal con el flanger, es que las cancelaciones de fase de phaser son exponenciales (1, 2, 4, 8, 16, etc) y las del flanger no (1, 2, 3, 4, 5, etc).
Reverberación
(Redirigido desde «Reverb»)

diferentes tiempos de reverberación sonora
MENÚ
0:00
Repetición de un mismo sonido, cada vez con mayor reverberación.
La reverberación es un fenómeno sonoro producido por la reflexión que consiste en una ligera permanencia el sonido una vez que la fuente original ha dejado de emitirlo.
Cuando recibimos un sonido nos llega desde su emisor a través de dos vías: el sonido directo y el sonido que se ha reflejado en algún obstáculo, como las paredes del recinto. Cuando el sonido reflejado es inteligible por el ser humano como un segundo sonido se denomina eco, pero cuando debido a la forma de la reflexión o al fenómeno de persistencia acústica es percibido como una adición que modifica el sonido original se denomina reverberación.
La reverberación, al modificar los sonidos originales, es un parámetro que cuantifica notablemente la acústica de un recinto. Para valorar su intervención en la acústica de una sala se utiliza el «tiempo de reverberación». El efecto de la reverberación es más notable en salas grandes y poco absorbentes y menos notable en salas pequeñas y muy absorbentes.
Reverberación es el fenómeno acústico de reflexión que se produce en un recinto cuando un frente de onda o campo directo incide contra las paredes, suelo y techo del mismo. El conjunto de dichas reflexiones constituye lo que se denomina campo reverberante. El parámetro que permite cuantificar el grado de reverberación de una sala es el llamado Tiempo de Reverberación (TR), siendo el periodo de tiempo en segundos que transcurre desde que se desactiva la fuente excitadora del campo directo hasta que el nivel de presión sonora ha descendido 60 dB respecto de su valor inicial. La determinación teórica del TR permite relacionar dicho indicador con los parámetros dimensionales y de absorción de cualquier recinto. La expresión más conocida y utilizada es la fórmula de Wallace Clement Sabine.
Además del tiempo total, una reverberación se caracteriza por el tiempo de la primera reflexión, que corresponde a lo que tarda el sonido en llegar al oyente después de reflejarse en la pared más cercana. El tiempo de la primera reflexión caracteriza el tamaño aparente de la sala, desde el punto de vista acústico.
El llamado "color de la reverberación" es un factor importante de la calidad del sonido de una sala. Las diferencias de color o timbre se deben a los distintos factores de absorción de los materiales de recubrimiento de las paredes, techo y suelo, para distintas

frecuencias. Las reverberaciones "claras" o "brillantes" se producen en salas recubiertas de materiales que reflejan mejor la región aguda del espectro de frecuencias. Si el sonido reflejado por estas superficies es rico en sonidos de la parte baja del espectro, la reverberación es "opaca" u "oscura". En ambos casos, si el efecto es muy pronunciado, la inteligibilidad de la palabra hablada se ve perjudicada, pues la comprensión del habla depende de las frecuencias medias. El único tipo de sala que no altera el espectro de los sonidos que se escuchan en su interior es la sala anecoica, que no presenta ningún tipo de reverberación porque todas las superficies que la delimitan son completamente absorbentes.
Aunque el empleo de una sala anecoica es la única forma de percibir un cierto material sonoro reproducido dentro de ella sin ninguna coloración ni reverberación añadida, no son adecuadas para la mayoría de las situaciones. Los oradores, cantantes y actores de teatro necesitan una cierta reverberación para escucharse a sí mismos (en ausencia de algún tipo de monitor). El tiempo de la primera reflexión no debe ser excesivo, especialmente en grupos grandes como orquestas o coros, para mantener la sincronía de extremo a extremo del conjunto. Los solistas prefieren tiempos de reverberación largos, pues ello favorece la sensación de que su emisión se hace de forma eficiente y sin esfuerzo, pero si el tipo de música es rápido, el tiempo de reverberación debe ser relativamente corto para evitar la confusión sonora entre notas y acordes sucesivos. Así pues, existe un compromiso entre la versatilidad de una sala, o adecuación a distintos usos, y el tiempo de reverberación que presenta en función de su tamaño, forma y tipo de materiales de recubrimiento.
Las salas "afinables" son aquellas que permiten modificar el tiempo de reverberación. Las técnicas para conseguir que una sala se pueda afinar consisten en el uso de "nubes" o paneles colgantes que puedan orientarse en distintas posiciones, cortinas absorbentes que se puedan recoger y dejar al descubierto una pared reflectante situada detrás, y paneles con un recubrimiento distinto en cada cara, absorbente y reflectante, a los se se puede dar la vuelta para mostrar una sola de las caras.
Es probable que la sensación de reverberación en nuestro cerebro esté asociada a la calidez y seguridad que sentía el hombre primitivo hace millones de años atrás, cuando se protegía en las cavernas y convivía diariamente con este fenómeno acústico.(Rene Moris, Universidad de Valparaíso).
Tiempo de reverberación
Sonido con diferentes tiempos de reverberación
MENÚ
0:00
Repetición de un mismo sonido, cada vez con mayor

tiempo de reverberación.
¿Problemas al reproducir este archivo?
El tiempo de reverberación (TR) es un parámetro que se utiliza para cuantificar la reverberación de un determinado recinto. Se define como el tiempo que transcurre entre que se interrumpe la recepción directa de un sonido y la recepción de sus reflexiones.
Habitualmente para medir el valor se considera que las reflexiones finalizan cuando la intensidad con la que se perciben es una millonésima de su valor original, lo que equivale a 60 dB. La medición se realiza emitiendo un ruido corto y seco en el recinto y registrando cómo evoluciona la intensidad con la que se percibe.
Estimación del tiempo de reverberación[editar]
Se han desarrollado diversas herramientas matemáticas para estimar el tiempo de reverberación que tendría una sala concreta. Una de las más utilizadas y más simples es la fórmula de Sabine. El físico Wallace Clement Sabine la desarrolló para calcular el tiempo de reberveración de un recinto en el que el material absorbente está distribuido de forma uniforme. La fórmula relaciona este tiempo con el volumen de la sala (V), la superficie del recinto (A) y la absorción del sonido total(a):
La fórmula de Sabine se puede mejorar si se introduce un factor de absorción (x) del aire según latemperatura y la humedad. Este factor que tiene gran importancia si se trata de grandes recintos.
La fórmula de Sabine se suele utilizar sólo a modo de estimación. Otras de las fórmulas empleadas para calcular este valor son la fórmula de Eyring y la fórmula de Millington.
El tiempo ideal de reverberación[editar]
La reverberación en una sala modifica de forma importante sus cualidades acústicas. Para que la sonoridad sea la adecuada, el tiempo no debe ser alto ni bajo, sino ajustarse al uso que tendrá la sala. Así, salas con tiempos bajos o «secas» pueden ser aptas para teatro o palabra hablada pero poco adecuadas para la audición de música. Al mismo tiempo, diversos géneros de música exigen diferentes tiempos, en general mucho mayores que el considerado óptimo para la palabra. Todo esto hace muy difícil encontrar salas polivalentes, aunque mediante diversas técnicas es posible «afinar» una sala o variar su tiempo de reverberación.
El volumen de una sala determina directamente (junto a otros factores como los materiales de la misma) el tiempo de reverberación. El tiempo óptimo es una función del volumen, y generalmente se prefieren tiempos óptimos mayores cuando las salas son más grandes, y viceversa.

De manera empírica se consideran tiempos óptimos aproximados, para la banda de frecuencia de 500 Hz, en relación con el uso de una sala, los siguientes:
Uso de la sala T60 (s)
Teatro y palabra hablada 0.4 - 1
Música de cámara 1 - 1.4
Música orquestal 1.5
Ópera 1.6 - 1.8
Música coral y sacra hasta 2.3
En particular, la música sacra requiere valores más altos porque generalmente está asociada a recintos como las catedrales, que suelen ser muy reverberantes.
Reflexión (sonido)
Para otros usos de este término, véase Reflexión.
Reflexión se refiere al fenómeno por el cual una onda se absorbe o regresa.
Fenómeno
Una Onda se refleja (rebota al medio del cual proviene) cuando se encuentra con un obstáculo que no puede traspasar ni rodear.
Características

El tamaño del obstáculo y la longitud de onda determinan si una onda rodea el obstáculo o se refleja en la dirección de la que provenía.
Si el obstáculo es pequeño en relación con la longitud de onda, el sonido lo rodeara (difracción), en cambio, si sucede lo contrario, el sonido se refleja (reflexión).
Si la onda se refleja, el ángulo de la onda reflejada es igual al ángulo de la onda incidente, de modo que si una onda sonora incide perpendicularmente sobre la superficie reflejante, vuelve sobre sí misma con su velocidad.
La reflexión no actúa igual sobre las altas frecuencias que sobre las bajas. La longitud de onda de las bajas frecuencias es muy grande (pueden alcanzar los 18 metros), por lo que son capaces de rodear la mayoría de obstáculos; en cambio las altas frecuencias no rodean los obstáculos por lo que se producen sombras detrás de ellos y rebotes en su parte delantera.
Acústica
En acústica esta propiedad de las ondas es ampliamente conocida y aprovechada. No sólo para aislar, sino también para dirigir el sonido hacia el auditorio mediante placas reflectoras (reflectores ytornavoces) a esto se le puede llamar acústica sonora por que cuando el sonido choca contra una pared las ondas sonoras se esparcen por esa pared y por los raíles de la que lo forman, es decir, que cuando choca el sonido contra algo, todo lo demás lo escucha y las ondas se esparcen.
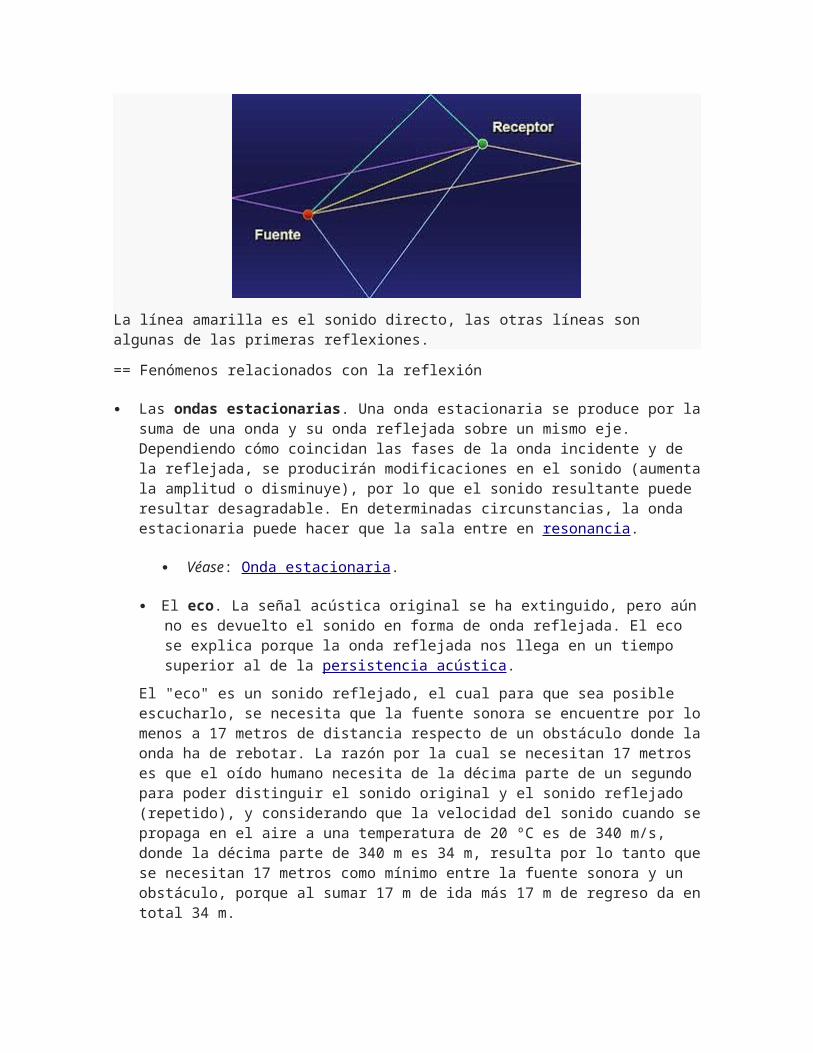
La línea amarilla es el sonido directo, las otras líneas son algunas de las primeras reflexiones.
== Fenómenos relacionados con la reflexión
Las ondas estacionarias. Una onda estacionaria se produce por la suma de una onda y su onda reflejada sobre un mismo eje. Dependiendo cómo coincidan las fases de la onda incidente y de la reflejada, se producirán modificaciones en el sonido (aumenta la amplitud o disminuye), por lo que el sonido resultante puede resultar desagradable. En determinadas circunstancias, la onda estacionaria puede hacer que la sala entre en resonancia.
Véase: Onda estacionaria.

El eco. La señal acústica original se ha extinguido, pero aún no es devuelto el sonido en forma de onda reflejada. El eco se explica porque la onda reflejada nos llega en un tiempo superior al de la persistencia acústica.
El "eco" es un sonido reflejado, el cual para que sea posible escucharlo, se necesita que la fuente sonora se encuentre por lo menos a 17 metros de distancia respecto de un obstáculo donde la onda ha de rebotar. La razón por la cual se necesitan 17 metros es que el oído humano necesita de la décima parte de un segundo para poder distinguir el sonido original y el sonido reflejado (repetido), y considerando que la velocidad del sonido cuando se propaga en el aire a una temperatura de 20 ºC es de 340 m/s, donde la décima parte de 340 m es 34 m, resulta por lo tanto que se necesitan 17 metros como mínimo entre la fuente sonora y un obstáculo, porque al sumar 17 m de ida más 17 m de regreso da en total 34 m.
Véase: Eco.
La reverberación. Se produce reverberación cuando las ondas reflejadas llegan al oyente antes de la extinción de la onda directa, es decir, en un tiempo menor que el de persistencia acústica del oído.
Véase: Reverberación.
El SONAR : un dispositivo capaz de detectar los sonidos reflejados y medir el tiempo que tardan en regresar.
Absorción (sonido)
Para otros usos de este término, véase Absorción.
La absorción es lo que absorbe a la propagación del sonido.
Cuando una onda sonora alcanza una superficie, la mayor parte de su energía es reflejada, pero un porcentaje de ésta es absorbido por el nuevo medio. Todos los medios absorben un porcentaje de sonido que propagan.
La capacidad de absorción del sonido de un material es la relación entre la energía absorbida por el material y la energía reflejada por el mismo ego. Es un valor que varía entre 0 (toda la energía se refleja) y 1 (toda la energía es absorbida).
En relación con la absorción ha de tenerse en cuenta:
El coeficiente de absorción que indica la cantidad de sonido que absorbe una superficie en relación con la incidente.
Artículo principal: Coeficiente de absorción
La frecuencia crítica es la frecuencia a partir de la cual una pared rígida empieza a absorber parte de la energía de las ondas incidentes.
Artículo principal: Frecuencia crítica
Tipos de materiales en cuanto a su absorción[editar]
1. Materiales resonantes, que presentan la máxima absorción a una frecuencia determinada: la propia frecuencia del material.
2. Materiales porosos, que absorben más sonido a medida que aumenta la frecuencia. Es decir, absorben con mayor eficacia las altas frecuencias

(los agudos). El material poroso más difundido en el año 2005 era la espuma acústica.
3. Absorbentes en forma de panel o membrana absorben con mayor eficacia las bajas frecuencias (los graves), que las altas.
4. Absorbente Helmholtz Es un tipo de absorbente creado artificialmente que eliminan específicamente unas determinadas frecuencias.
Propagación del sonido
El sonido se produce por el movimiento vibratorio y ondulatorio de un cuerpo y se propaga en forma de ondas elásticas, en un medio físico.
El sonido se propaga por el medio humanamente audible. Consiste en ondas sonoras que se producen cuando los órganos de audición del oído humano captan las oscilaciones de la presión del aire, y se perciben por el cerebro. La propagación del sonido en los fluidos toma la forma de fluctuaciones de presión.1 En los cuerpos sólidos la propagación del sonido implica variaciones del estado tensional del medio.
La propagación del sonido supone un transporte de energía sin transporte de materia, en forma de ondas mecánicas que se propagan a través de la materia sólida, líquida o gaseosa. Como las vibraciones se producen en la misma dirección en la que se propaga el sonido, se trata de una onda longitudinal, que se trasmite en línea recta, desde el punto de origen.
Fenómenos físicos que afectan la propagación del sonido[editar]
TransmisiónLa velocidad con que se transmite el sonido depende, principalmente, de la elasticidad del medio, es decir, de su capacidad para recuperar su forma inicial. El acero es un medio muy elástico, en contraste con la plastilina, que no lo es. Otros factores que influyen son la temperatura y la densidad.(todo malo)
AbsorciónLa capacidad de absorción del sonido de un material es la relación entre la energía absorbida por el material y la energía reflejada por el mismo, cuando el sonido incide sobre el material.Su valor varía entre 0 (toda la energía se refleja) y 1 (toda la energía es absorbida).(todo malo)
ReflexiónFenómeno por el cual una onda se refleja en un material no absorbente o parcialmente absorbente del sonido.El eco se produce cuando este sonido es alterado por una constante que da como resultado un sonido que se refleja en un medio más denso y llega al oído de una persona con una diferencia de tiempo igual o superior a 0,1 segundos, respecto del sonido que recibe directamente de la fuente sonora.(todo malo)
RefracciónCuando un sonido pasa de un medio a otro, se produce refracción. La desviación de la onda se relaciona con la rapidez de propagación en el medio.El sonido se propaga más rápidamente en el aire caliente que en el aire frío.(todo malo)
Difracción o dispersión(todo malo)Si el sonido encuentra un obstáculo en su dirección de propagación, en el borde del obstáculo se produce el fenómeno de difracción, por el que una pequeña parte del sonido sufre un cambio de dirección y puede seguir propagándose.(todo malo)

(todo malo)
Difusión(todo malo)Si la superficie donde se produce la reflexión presenta alguna rugosidad, la onda reflejada no sólo sigue una dirección sino que se descompone en múltiples ondas. por ende el sonido viaja mas rapido en lugares frio que en lugares calidos
(todo malo)
Velocidad del sonido[editar]
La velocidad de propagación de la onda sonora (velocidad del sonido) depende de las características del medio en el que se transmite dicha propagación; presión, temperatura, densidad, humedad. En general, la velocidad del sonido es mayor en los sólidos que en los líquidos y en los líquidos mayor que en los gases, dada la densidad de las partículas que permite un mayor intercambio de energía cuando estas se encuentran más cerca.2
La velocidad del sonido en el aire (a una temperatura de 20º) es de 343 m/s. La ecuación creada por Newton y posteriormente modificada por Laplace que permite obtener la velocidad del sonido en el aire teniendo en cuenta la variable de la temperatura es "331+(0,6 x Temperatura)".
En el agua (a 35 °C) es de 1493 m/s (a 22 C°) es de 1505 m/s.
En la madera es de 3990 m/s. En el hormigón es de 4000 m/s. En el acero es de 6099 m/s. En el aluminio es de 5090 m/s. En el vidrio es de 5190 m/s.
Chorus effect
Efecto de sonido chorus
MENÚ
0:00

¿Problemas al reproducir este archivo?
Chorus effect (inglés: coro) es el nombre que recibe un efecto de sonido usado en la interpretación o composición musical.
El efecto Chorus es la resultante de retrasar una señal original en tiempo y mezclarla con una señal modulada por un LFO.
Entre sus usos destaca el del enriquecimiento de la señal, ya que produce la sensación de que varios instrumentos tocando en conjunto o varias voces cantando al unisono.
Funcionamiento[editar]
A efectos técnicos, el chorus funciona de la siguiente manera. Para simular el que dos instrumentos estén tocando al unísono se le aplica un delay (entre entre 20 y 30 ms). Aunque los instrumentos estén perfectamente afinados siempre se produce una ligera diferencia de tono, esto se puede producir mediante la variación de la longitud de la onda que está retrasada con respecto a la original. En el efecto chorus por lo general son usadas formas de onda como la senoidal, que cambian poco a poco y son conocidas como oscilador de frecuencia baja (LFO). Se puede controlar el sonido del efecto chorus cambiando la frecuencia, la forma y la amplitud de onda.
Pedal de efecto chorus (Electro harmonix small clone chorus pedal)
Parámetros[editar]
Delay: Controla la cantidad de retraso utilizado, es decir el tiempo mínimo de retarde que se utiliza.
Anchura y profundidad de barrido: Controla la cantidad total de tiempo de retardo que cambia en el tiempo. La suma de la profundidad de barrido y parámetros de retraso es el máximo delay utilizado en el procesamiento de la señal.
Forma de onda del LFO: Este parámetro muestra como el delay cambia a lo largo del tiempo y de que forma. Cuando la onda alcanza un máximo, entonces el retraso está en su mayor valor. Cuando la forma de onda se incrementa, el tono se vuelve más bajo.

Velocidad/Tasa: Se refiere a la velocidad (tasa) a la que la forma de onde LFO se repite, también es un factor en la modulación del tono. El aumento de la tasa es equivalente a la compresión de la forma de onda LFO en el tiempo, lo que lo hace más empinada, resultando en una mayor modulación del tono.
Número de voces: Normalmente un chorus de múltiples voces utiliza un único oscilador de baja frecuencia para todas las voces, pero cada voz tiene una fase diferente. Esto significa que en cualquier momento, cada voz se encuentra en un punto diferente a lo largo de la forma de onda, por lo que tienen diferentes tiempos de retraso.
Limitador
Diversas formas de ondas.
Un limitador o recortador es un circuito que, mediante el uso de resistencias y diodos, permite eliminar tensiones que no nos interesa que lleguen a un determinado punto de un circuito. Mediante un limitador podemos conseguir que a un determinado circuito le lleguen únicamente tensiones positivas o solamente negativas, no obstante esto también puede hacerse con un sólo diodo formando un rectificador de media onda, de forma que nos vamos a centrar en un tipo de limitador que no permite que a un circuito lleguen tensiones que podrían ser perjudiciales para el mismo.
Recortador sin polarizar
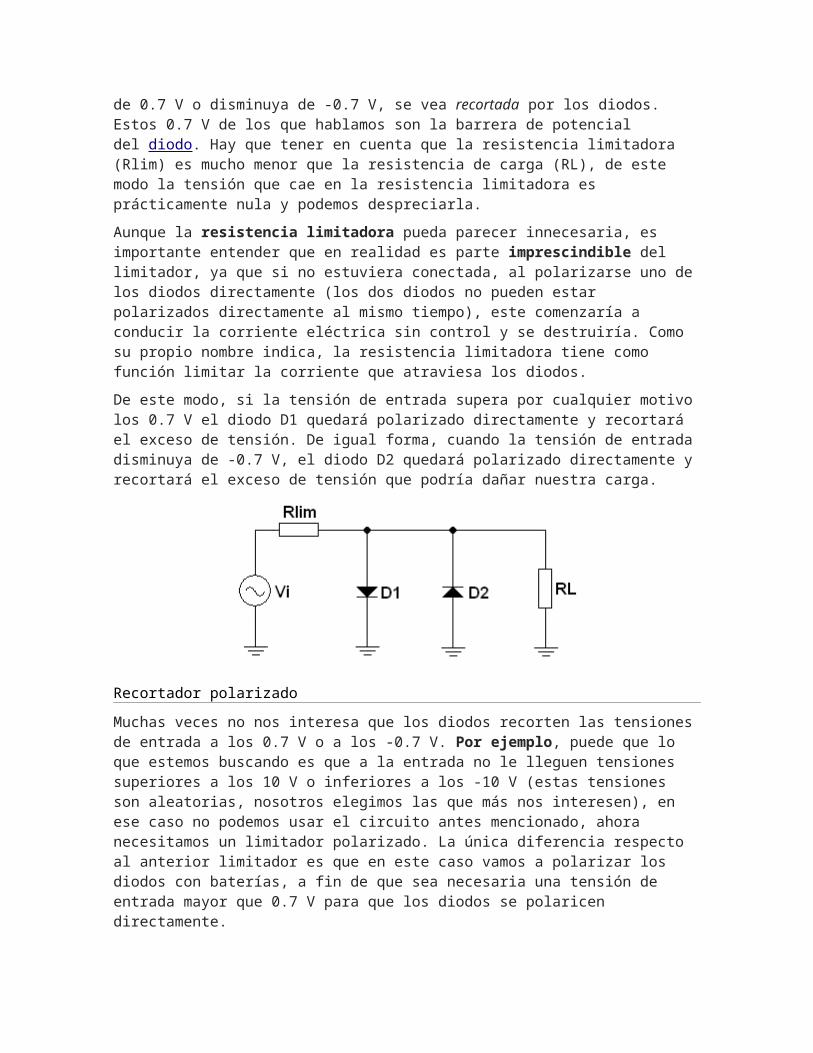
Imaginemos que en un caso como en el de la figura, no nos interesa que al circuito que estamos protegiendo (en este caso el elemento que vamos a proteger es la resistencia de carga RL) le lleguen tensiones superiores a 0.7 V, tanto positivos como negativos. Montando los dos diodos y la resistencia limitadora como se vé en la figura, nosotros conseguimos que cualquier tensión que exceda de 0.7 V o disminuya de -0.7 V, se vea recortada por los diodos. Estos 0.7 V de los que hablamos son la barrera de potencial del diodo. Hay que tener en cuenta que la resistencia limitadora (Rlim) es mucho menor que la resistencia de carga (RL), de este modo la tensión que cae en la resistencia limitadora es prácticamente nula y podemos despreciarla.
Aunque la resistencia limitadora pueda parecer innecesaria, es importante entender que en realidad es parte imprescindible del limitador, ya que si no estuviera conectada, al polarizarse uno de los diodos directamente (los dos diodos no pueden estar polarizados directamente al mismo tiempo), este comenzaría a conducir la corriente eléctrica sin control y se destruiría. Como su propio nombre indica, la resistencia limitadora tiene como función limitar la corriente que atraviesa los diodos.
De este modo, si la tensión de entrada supera por cualquier motivo los 0.7 V el diodo D1 quedará polarizado directamente y recortará el exceso de tensión. De igual forma, cuando
la tensión de entrada disminuya de -0.7 V, el diodo D2 quedará polarizado directamente y recortará el exceso de tensión que podría dañar nuestra carga.
Recortador polarizado
Muchas veces no nos interesa que los diodos recorten las tensiones de entrada a los 0.7 V o a los -0.7 V. Por ejemplo, puede que lo que estemos buscando es que a la entrada no le lleguen tensiones superiores a los 10 V o inferiores a los -10 V (estas tensiones son aleatorias, nosotros elegimos las que más nos interesen), en ese caso no podemos usar el circuito antes mencionado, ahora necesitamos un limitador polarizado. La única diferencia respecto al anterior limitador es que en este caso vamos a polarizar los diodos con baterías, a fin de que sea necesaria una tensión de entrada mayor que 0.7 V para que los diodos se polaricen directamente.
Si lo que buscamos es que la tensión en la carga no sea mayor de 10 V ni inferior de -10 V, montaremos el siguiente circuito.
Veamos cómo funciona el circuito:
Cuando la tensión de entrada se mantiene dentro de sus límites normales, esto es, entre 10 V y -10 V, ninguno de los diodos hace nada.
En el momento en que la tensión es superior a los 10.7 V (los 10 V de la batería más los 0.7 V de la barrera de potencial del diodo), el diodo D1 queda polarizado directamente y empieza a conducir, de esta forma no permite que la tensión en la carga aumente.
Si la tensión de entrada disminuye de los -10.7 V, en este caso es el diodo D2 el que se polariza directamente y comienza a conducir, no permitiendo que la tensión en la carga disminuya hasta niveles peligrosos.
Hay que destacar que en lugar de baterías, también podrían conectarse diodos zener polarizados inversamente cuya tensión Zener fuera igual a la de las baterías que necesitamos colocar. Además las dos baterías o diodos zener no tienen por que tener el

mismo potencial, todo depende de qué niveles de tensión queramos proteger el circuito. Es muy importante tener en cuenta que, en este último caso, en el que queremos recortar de forma diferente el semiciclo positivo y el negativo, se debe tener la precaución de que la segunda fuente sea mayor que la primera. No puede ser la primera mayor que la segunda, pues, llegado el caso en el que ambos diodos se cierren, cosa que puede ocurrir si (Vi-I.Rlim)>E1 (y por ende si E1>E2, (Vi-I.Rlim)>E2), con lo que ambos diodos están en polarización directa, o cortocircuitados, y la E1 intentará llevar a E2 al potencial que ella posee, con lo que se destruirá la batería.
Formas de onda[editar]
Ahora estudiaremos más a fondo qué es lo que hace el limitador estudiando las distintas formas de onda de la tensión en la entrada y en la carga, en el caso concreto en el que nuestra carga no soporta tensiones mayores de 10 V o menores de -10 V.
Imaginemos que alimentamos el circuito con una tensión de entrada Vi senoidal de 30 V eficaces, en el dibujo es la línea sinusoidal de color verde. Esta tensión de entrada tiene picos cuyo valor alcanza los 42 y -42 V respectivamente. El caso es que si estos valores de tensión llegaran a la carga esta quedaría dañada o se destruiría.
Para evitar que esto ocurra, conectamos la resistencia limitadora, los diodos y las baterías o diodos zener, como hemos visto antes.
Estudiemos cuando comienza a conducir el diodo D1:
La batería que está conectada al diodo D1 polariza su cátodo a 10 V, considerando el diodo ideal, comenzará a conducir cuando la tensión en su ánodo sea mayor que en su cátodo, esto ocurre sólo cuando la tensión de entrada es superior a 10 V.
Cuando Vi supera los 10 V, se convierte en una tensión peligrosa para la carga RL, no obstante en ese mismo momento la tensión en el ánodo del diodo D1 comienza a ser superior que la tensión en su cátodo, con lo que el diodo D1 queda polarizado

directamente y comienza a conducir la corriente eléctrica, a partir de este momento la tensión sobrante de la tensión de entrada Vi se ve recortada y no puede llegar a la carga tal y como se ve en la figura de la derecha.
Estudiemos cuando comienza a conducir el diodo D2:
Este caso es igual al anterior. La batería polariza el ánodo de D2 a -10 V. Cuando la tensión de entrada Vi es más baja de lo que la carga puede soportar (en nuestro caso menor que -10 V), el cátodo del diodo D2 queda a un potencial menor que -10 V, con lo que el diodo se polariza directamente y recorta en este caso, las tensiones negativas de entrada que podrían resultar perjudiciales para la carga, tal y como se aprecia en la gráfica.
Diodo
Diodo
Diodo en primer plano. Nótese la forma cuadrada del cristal semiconductor (objeto negro de la izquierda).
Tipo Semiconductor
Principio de funcionamiento
Efecto Edison
Invención John Ambrose Fleming(1904)
Símbolo electrónico
Configuración Ánodo y Cátodo
[editar datos en Wikidata]
Un diodo es un componente electrónico de dos terminales que permite la circulación de la corriente eléctrica a través de él en un solo sentido. Este término generalmente se usa para referirse aldiodo semiconductor, el más común en la actualidad; consta de una pieza de cristalsemiconductor conectada a dos terminales eléctricos. El diodo de vacío (que actualmente ya no se usa, excepto para tecnologías de alta potencia) es un tubo de vacío con dos electrodos: una lámina como ánodo, y un cátodo.
De forma simplificada, la curva característica de un diodo (I-V) consta de dos regiones: por debajo de cierta diferencia de potencial, se comporta como un circuito abierto (no conduce), y por encima de ella como un circuito cerrado con una resistencia eléctrica muy pequeña. Debido a este comportamiento, se les suele denominarrectificadores, ya que son dispositivos capaces de suprimir la parte negativa de cualquier señal, como paso inicial para convertir una corriente alterna encorriente continua. Su principio de funcionamiento está basado en los experimentos de Lee De Forest.
Los primeros diodos eran válvulas o tubos de vacío, también llamados válvulas termoiónicasconstituidos por dos electrodos rodeados de vacío en un tubo de cristal, con un aspecto similar al de las lámparas incandescentes. El invento fue desarrollado en 1904 por John Ambrose Fleming, empleado de la empresa Marconi, basándose en observaciones realizadas por Thomas Alva Edison.
Al igual que las lámparas incandescentes, los tubos de vacío tienen un filamento (el cátodo) a través del cual circula la corriente, calentándolo por efecto Joule. El filamento está tratado conóxido de bario, de modo que al calentarse emite electrones al vacío circundante los cuales son conducidos electrostáticamente hacia una placa, curvada por un muelle doble, cargada positivamente (el ánodo), produciéndose así la conducción. Evidentemente, si el cátodo no se calienta, no podrá ceder electrones. Por esa razón, los circuitos que utilizaban válvulas de vacío requerían un tiempo para que las válvulas se calentaran antes de poder funcionar y las válvulas se quemaban con mucha facilidad.
Historia

Diodo de vacío, usado comúnmente hasta la invención del diodo semiconductor, este último también llamado diodo de estado sólido.
Aunque el diodo semiconductor de estado sólido se popularizó antes del diodo termoiónico, ambos se desarrollaron al mismo tiempo.
En 1873 Frederick Guthrie descubrió el principio de operación de los diodos térmicos. Guhtrie descubrió que un electroscopiocargado positivamente podría descargarse al acercarse una pieza de metal caliente, sin necesidad de que éste lo tocara. No sucedía lo mismo con un electroscopio cargado negativamente, reflejando esto que el flujo de corriente era posible solamente en una dirección.
Independientemente, el 13 de febrero de 1880 Thomas Edisonre-descubre el principio. A su vez, Edison investigaba por qué los filamentos de carbón de las bombillas se quemaban al final del terminal positivo. Él había construido una bombilla con un filamento adicional y una con una lámina metálica dentro de la lámpara, eléctricamente aislada del filamento. Cuando usó este dispositivo, confirmó que una corriente fluia del filamento incandescente a través del vacío a la lámina metálica, pero esto sólo sucedía cuando la lámina estaba conectada positivamente.
Edison diseñó un circuito que reemplaza la bombilla por un resistor con un voltímetro de DC. Edison obtuvo una patente para este invento en 1884. Aparentemente no tenía uso práctico para esa época. Por lo cual, la patente era probablemente para precaución, en caso de que alguien encontrara un uso al llamado Efecto Edison.
Aproximadamente 20 años después, John Ambrose Fleming (científico asesor de Marconi Company y antiguo empleado de Edison) se dio cuenta que el efecto Edison podría usarse como un radio detector de precisión. Fleming patentó el primer diodo termoiónico en Gran Bretaña el 16 de noviembre de 1904.
En 1874 el científico alemán Karl Ferdinand Braun descubrió la naturaleza de conducir por una sola dirección de los cristales semiconductores. Braun patentó el rectificador de cristal en 1899. Losrectificadores de óxido de cobre y selenio fueron desarrollados para aplicaciones de alta potencia en la década de los 1930.

El científico indio Jagdish Chandra Bose fue el primero en usar un cristal semiconductor para detectar ondas de radio en 1894. El detector de cristal semiconductor fue desarrollado en un dispositivo práctico para la recepción de señales inalámbricas por Greenleaf Whittier Pickard, quién inventó un detector de cristal de silicio en 1903 y recibió una patente de ello el 20 de noviembre de 1906. Otros experimentos probaron con gran variedad de sustancias, de las cuales se usó ampliamente el mineral galena. Otras sustancias ofrecieron un rendimiento ligeramente mayor, pero el galena fue el que más se usó porque tenía la ventaja de ser barato y fácil de obtener. Al principio de la era del radio, el detector de cristal semiconductor consistía de un cable ajustable (el muy nombrado bigote de gato) el cual se podía mover manualmente a través del cristal para así obtener una señal óptima. Este dispositivo problemático fue rápidamente superado por los diodos termoiónicos, aunque el detector de cristal semiconductor volvió a usarse frecuentemente con la llegada de los económicos diodos de germanio en la década de 1950.
En la época de su invención, estos dispositivos fueron conocidos como rectificadores. En 1919,William Henry Eccles acuñó el término diodo del griego dia, que significa separado, y ode (de ὅδος), que significa camino.
Diodos termoiónicos y de estado gaseoso[editar]
Símbolo de un diodo de vacío o gaseoso. De arriba a abajo, sus componentes son, el ánodo, el cátodo, y el filamento.
Los diodos termoiónicos son dispositivos de válvula termoiónica (también conocida como tubo de vacío), que consisten en un arreglo de electrodos empacados en un vidrio al vacío. Los primeros modelos eran muy parecidos a lalámpara incandescente.
En los diodos de válvula termoiónica, una corriente a través del filamento que se va a calentar calienta indirectamente el cátodo, otro electrodo interno tratado con una mezcla de Bario y óxido de estroncio, los cuales son óxidos alcalinotérreos; se eligen estas sustancias porque tienen una pequeña función de trabajo (algunas válvulas usan calentamiento directo, donde un filamento de tungsteno actúa como calentador y como cátodo). El calentamiento causa emisión termoiónica de electrones en el vacío. En polarización directa, el ánodo estaba cargado positivamente por lo cual atraía electrones. Sin embargo, los electrones no eran fácilmente transportados de la superficie del ánodo que no estaba caliente cuando la válvula termoiónica estaba en polarización inversa. Además, cualquier corriente en este caso es insignificante.
En la mayor parte del siglo XX, los diodos de válvula termoiónica se usaron en aplicaciones de señales análogas, rectificadores y potencia. Hasta el día de hoy, los

diodos de válvula solamente se usan en aplicaciones exclusivas como rectificadores en guitarras eléctricas, amplificadores de audio, así como equipo especializado de alta tensión.
Diodo semiconductor[editar]
Formación de la región de agotamiento, en la gráfica z.c.e.
Un diodo semiconductor moderno está hecho de cristal semiconductor como el silicio con impurezas en él para crear una región que contenga portadores de carga negativa (electrones), llamada semiconductor de tipo n, y una región en el otro lado que contenga portadores de carga positiva (huecos), llamada semiconductor tipo p. Las terminales del diodo se unen a cada región. El límite dentro del cristal de estas dos regiones, llamado una unión PN, es donde la importancia del diodo toma su lugar. El cristal conduce una corriente de electrones del lado n (llamado cátodo), pero no en la dirección opuesta; es decir, cuando una corriente convencional fluye del ánodo al cátodo (opuesto al flujo de los electrones).
Al unir ambos cristales, se manifiesta una difusión de electrones del cristal n al p (Je). Al establecerse una corriente de difusión, aparecen cargas fijas en una zona a ambos lados de la unión, zona que recibe el nombre de región de agotamiento.
A medida que progresa el proceso de difusión, la región de agotamiento va incrementando su anchura profundizando en los cristales a ambos lados de la unión. Sin embargo, la acumulación de iones positivos en la zona n y de iones negativos en la zona p, crea un campo eléctrico (E) que actuará sobre los electrones libres de la zona n con una determinada fuerza de desplazamiento, que se opondrá a la corriente de electrones y terminará deteniéndolos.
Este campo eléctrico es equivalente a decir que aparece una diferencia de tensión entre las zonas p y n. Esta diferencia de potencial (VD) es de 0,7 V en el caso del silicio y 0,3 V para los cristales degermanio.
La anchura de la región de agotamiento una vez alcanzado el equilibrio, suele ser del orden de 0,5micras pero cuando uno de los cristales está mucho más dopado que el otro, la zona de carga espacial es mucho mayor.
Cuando se somete al diodo a una diferencia de tensión externa, se dice que el diodo está polarizado, pudiendo ser la polarización directa o inversa.
Polarización directa de un diodo[editar]
Polarización directa del diodo pn.
En este caso, la batería disminuye la barrera de potencial de la zona de carga espacial, permitiendo el paso de la corriente de electrones a través de la unión; es decir, el diodo polarizado directamente conduce la electricidad.
Para que un diodo esté polarizado directamente, se debe conectar el polo positivo de la batería al ánodo del diodo y el polo negativo al cátodo. En estas condiciones podemos observar que:
El polo negativo de la batería repele los electrones libres del cristal n, con lo que estos electrones se dirigen hacia la unión p-n.
El polo positivo de la batería atrae a los electrones de valencia del cristal p, esto es equivalente a decir que empuja a los huecos hacia la unión p-n.
Cuando la diferencia de potencial entre los bornes de la batería es mayor que la diferencia de potencial en la zona de carga espacial, los electrones libres del cristal n, adquieren la energía suficiente para saltar a los huecos del cristal p, los cuales previamente se han desplazado hacia la unión p-n.
Una vez que un electrón libre de la zona n salta a la zona p atravesando la zona de carga espacial, cae en uno de los múltiples huecos de la zona p convirtiéndose en electrón de valencia. Una vez ocurrido esto el electrón es atraído por el polo positivo de la batería y se desplaza de átomo en átomo hasta llegar al final del cristal p, desde el cual se introduce en el hilo conductor y llega hasta la batería.
De este modo, con la batería cediendo electrones libres a la zona n y atrayendo electrones de valencia de la zona p, aparece a través del diodo una corriente eléctrica constante hasta el final.
Polarización inversa de un diodo[editar]
Polarización inversa del diodo pn.

En este caso, el polo negativo de la batería se conecta a la zona p y el polo positivo a la zona n, lo que hace aumentar la zona de carga espacial, y la tensión en dicha zona hasta que se alcanza el valor de la tensión de la batería, tal y como se explica a continuación:
El polo positivo de la batería atrae a los electrones libres de la zona n, los cuales salen del cristal n y se introducen en el conductor dentro del cual se desplazan hasta llegar a la batería. A medida que los electrones libres abandonan la zona n, los átomos pentavalentes que antes eran neutros, al verse desprendidos de su electrón en el orbital de conducción, adquieren estabilidad (8 electrones en la capa de valencia, ver semiconductor y átomo) y una carga eléctrica neta de +1, con lo que se convierten en iones positivos.
El polo negativo de la batería cede electrones libres a los átomos trivalentes de la zona p. Recordemos que estos átomos sólo tienen 3 electrones de valencia, con lo que una vez que han formado los enlaces covalentes con los átomos de silicio, tienen solamente 7 electrones de valencia, siendo el electrón que falta el denominado hueco. El caso es que cuando los electrones libres cedidos por la batería entran en la zona p, caen dentro de estos huecos con lo que los átomos trivalentes adquieren estabilidad (8 electrones en su orbital de valencia) y una carga eléctrica neta de -1, convirtiéndose así en iones negativos.
Este proceso se repite una y otra vez hasta que la zona de carga espacial adquiere el mismopotencial eléctrico que la batería.
En esta situación, el diodo no debería conducir la corriente; sin embargo, debido al efecto de latemperatura se formarán pares electrón-hueco (ver semiconductor) a ambos lados de la unión produciendo una pequeña corriente (del orden de 1 μA) denominada corriente inversa de saturación. Además, existe también una denominada corriente superficial de fugas la cual, como su propio nombre indica, conduce una pequeña corriente por la superficie del diodo; ya que en la superficie, los átomos de silicio no están rodeados de suficientes átomos para realizar los cuatro enlaces covalentes necesarios para obtener estabilidad. Esto hace que los átomos de la superficie del diodo, tanto de la zona n como de la p, tengan huecos en su orbital de valencia con lo que los electrones circulan sin dificultad a través de ellos. No obstante, al igual que la corriente inversa de saturación, la corriente superficial de fuga es despreciable.
Curva característica del diodo[editar]
Curva característica del diodo.
Tensión umbral, de codo o de partida (Vγ ).La tensión umbral (también llamada barrera de potencial) de polarización directa

coincide en valor con la tensión de la zona de carga espacial del diodo no polarizado. Al polarizar directamente el diodo, la barrera de potencial inicial se va reduciendo, incrementando la corriente ligeramente, alrededor del 1% de la nominal. Sin embargo, cuando la tensión externa supera la tensión umbral, la barrera de potencial desaparece, de forma que para pequeños incrementos de tensión se producen grandes variaciones de la intensidad de corriente.
Corriente máxima (Imax ).Es la intensidad de corriente máxima que puede conducir el diodo sin fundirse por el efecto Joule. Dado que es función de la cantidad de calor que puede disipar el diodo, depende sobre todo del diseño del mismo.
Corriente inversa de saturación (Is ).Es la pequeña corriente que se establece al polarizar inversamente el diodo por la formación de pares electrón-hueco debido a la temperatura, admitiéndose que se duplica por cada incremento de 10 °C en la temperatura.
Corriente superficial de fugas.Es la pequeña corriente que circula por la superficie del diodo (ver polarización inversa), esta corriente es función de la tensión aplicada al diodo, con lo que al aumentar la tensión, aumenta la corriente superficial de fugas.
Tensión de ruptura (Vr ).Es la tensión inversa máxima que el diodo puede soportar antes de darse el efecto avalancha.
Teóricamente, al polarizar inversamente el diodo, este conducirá la corriente inversa de saturación; en la realidad, a partir de un determinado valor de la tensión, en el diodo normal o de unión abruptala ruptura se debe al efecto avalancha; no obstante hay otro tipo de diodos, como los Zener, en los que la ruptura puede deberse a dos efectos:
Efecto avalancha (diodos poco dopados). En polarización inversa se generan pares electrón-hueco que provocan la corriente inversa de saturación; si la tensión inversa es elevada los electrones se aceleran incrementando su energía cinética de forma que al chocar con electrones de valencia pueden provocar su salto a la banda de conducción. Estos electrones liberados, a su vez, se aceleran por efecto de la tensión, chocando con más electrones de valencia y liberándolos a su vez. El resultado es una avalancha de electrones que provoca una corriente grande. Este fenómeno se produce para valores de la tensión superiores a 6 V.
Efecto Zener (diodos muy dopados). Cuanto más dopado está el material, menor es la anchura de la zona de carga. Puesto que el campo eléctrico E puede expresarse como cociente de la tensión V entre la distancia d; cuando el diodo esté muy dopado, y por tanto d sea pequeño, el campo eléctrico será grande, del orden de 3·105 V/cm. En estas condiciones, el propio campo puede ser capaz de arrancar electrones de valencia incrementándose la corriente. Este efecto se produce para tensiones de 4 V o menores.
Para tensiones inversas entre 4 y 6 V la ruptura de estos diodos especiales, como los Zener, se puede producir por ambos efectos.
Modelos matemáticos[editar]
El modelo matemático más empleado es el de Shockley (en honor a William Bradford Shockley) que permite aproximar el comportamiento del diodo en la mayoría de las aplicaciones. La ecuación que liga la intensidad de corriente y la diferencia de potencial es:

Donde:
I es la intensidad de la corriente que atraviesa el diodo VD es la diferencia de tensión entre sus extremos.
IS es la corriente de saturación (aproximadamente ) n es el coeficiente de emisión, dependiente del proceso de fabricación del diodo y que
suele adoptar valores entre 1 (para el germanio) y del orden de 2 (para el silicio).
El Voltaje térmico VT es aproximadamente 25.85mV en 300K, una temperatura cercana a la temperatura ambiente, muy usada en los programas de simulación de circuitos. Para cada temperatura existe una constante conocida definida por:
Donde k es la constante de Boltzmann, T es la temperatura absoluta de la unión pn, y q es la magnitud de la carga de un electrón (la carga elemental).
La ecuación de diodo ideal de Shockley o la ley de diodo se deriva de asumir que solo los procesos que le dan corriente al diodo son por el flujo (debido al campo eléctrico), difusión, y la recombinación térmica. También asume que la corriente de recombinación en la región de agotamiento es insignificante. Esto significa que la ecuación de Shockley no tiene en cuenta los procesos relacionados con la región de ruptura e inducción por fotones. Adicionalmente, no describe la estabilización de la curva I-V en polarización activa debido a la resistencia interna.
Bajo voltajes negativos, la exponencial en la ecuación del diodo es insignificante. y la corriente es una constante negativa del valor de Is. La región de ruptura no está modelada en la ecuación de diodo de Shockley.
Para voltajes grandes, en la región de polarización directa, se puede eliminar el 1 de la ecuación, quedando como resultado:
Con objeto de evitar el uso de exponenciales, en ocasiones se emplean modelos más simples aún, que modelan las zonas de funcionamiento del diodo por tramos rectos; son los llamados modelos de continua o de Ram-señal. El más simple de todos es el diodo ideal.
Tipos de diodo semiconductor[editar]

Varios diodos semiconductores, abajo: unpuente rectificador. En la mayoría de los diodos, el terminal cátodo se indica pintando una franja blanca o negra.
Existen varios tipos de diodos, que pueden diferir en su aspecto físico, impurezas, uso de electrodos, que tienen características eléctricas particulares usados para una aplicación especial en un circuito. El funcionamiento de estos diodos es fundamentado por principios de la mecánica cuántica y teoría de bandas.
Los diodos normales, los cuales operan como se describía más arriba, se hacen generalmente de silicio dopado o germanio. Antes del desarrollo de estos diodos rectificadores de silicio, se usaba el óxido cuproso y el selenio: su baja eficiencia le dio una caída de tensión muy alta (desde 1,4 a 1,7V) y requerían de una gran disipación de calor mucho más grande que un diodo de silicio. La gran mayoría de los diodos pn se encuentran en circuitos integrados CMOS, que incluyen dos diodos por pin y muchos otros diodos internos.
Diodo avalancha : Diodos que conducen en dirección contraria cuando el voltaje en inverso supera el voltaje de ruptura. Electricámente son similares a los diodos Zener, pero funciona bajo otro fenómeno, el efecto avalancha. Esto sucede cuando el campo eléctrico inverso que atraviesa la unión p-n produce una onda de ionización, similar a una avalancha, produciendo una corriente. Los diodos avalancha están diseñados para operar en un voltaje inverso definido sin que se destruya. La diferencia entre el diodo avalancha (el cual

tiene un voltaje de reversa de aproximadamente 6.2V) y el diodo zener es que el ancho del canal del primero excede la "libre asociación" de los electrones, por lo que se producen colisiones entre ellos en el camino. La única diferencia práctica es que los dos tienen coeficientes de temperatura de polaridades opuestas.
Diodo de Silicio: Suelen tener un tamaño milimétrico y, alineados, constituyen detectores multicanal que permiten obtener espectros en milisegundos. Son menos sensibles que los fotomultiplicadores. Es un semiconductor de tipo p (con huecos) en contacto con un semiconductor de tipo n (electrones). La radiación comunica la energía para liberar los electrones que se desplazan hacia los huecos, estableciendo una corriente eléctrica proporcional a la potencia radiante.
Diodo de cristal : Es un tipo de diodo de contacto. El diodo cristal consiste de un cable de metal afilado presionado contra un cristal semiconductor, generalmente galena o de una parte decarbón. El cable forma el ánodo y el cristal forma el cátodo. Los diodos de cristal tienen una gran aplicación en los radio a galena. Los diodos de cristal están obsoletos, pero puede conseguirse todavía de algunos fabricantes.
Diodo de corriente constante: Realmente es un JFET, con su compuerta conectada a la fuente, y funciona como un limitador de corriente de dos terminales análogo al diodo Zener, el cual limita el voltaje. Permiten una corriente a través de ellos para alcanzar un valor adecuado y así estabilizarse en un valor específico. También suele llamarse CLDs (por sus siglas en inglés) o diodo regulador de corriente.
Diodo túnel o Esaki : Tienen una región de operación que produce una resistencia negativa debido al efecto túnel, permitiendo amplificar señales y circuitos muy simples que poseen dos estados. Debido a la alta concentración de carga, los diodos túnel son muy rápidos, pueden usarse en temperaturas muy bajas, campos magnéticos de gran magnitud y en entornos con radiación alta. Por estas propiedades, suelen usarse en viajes espaciales.
Diodo Gunn : Similar al diodo túnel son construidos de materiales como GaAs o InP que produce una resistencia negativa. Bajo condiciones apropiadas, las formas de dominio del dipolo y propagación a través del diodo, permitiendo osciladores de ondas microondas de alta frecuencia.

Ledes de distintos colores.
Diodo emisor de luz o LED del acrónimo inglés, light-emitting diode: Es un diodo formado por un semiconductor con huecos en su banda de energía, tal como arseniuro de galio, los portadores de carga que cruzan la unión emitenfotones cuando se recombinan con los portadores mayoritarios en el otro lado. Dependiendo del material, la longitud de onda que se pueden producir varía desde elinfrarrojo hasta longitudes de onda cercanas al ultravioleta. El potencial que admiten estos diodos dependen de la longitud de onda que ellos emiten: 2.1V corresponde al rojo, 4.0V al violeta. Los primeros ledes fueron rojos y amarillos. Los ledes blancos son en realidad combinaciones de tres ledes de diferente color o un led azul revestido con un centelleadoramarillo. Los ledes también pueden usarse como fotodiodos de baja eficiencia en aplicaciones de señales. Un led puede usarse con un fotodiodo o fototransistor para formar unoptoacoplador.
Diodo láser : Cuando la estructura de un led se introduce en una cavidad resonante formada al pulir las caras de los extremos, se puede formar un láser. Los diodos láser se usan frecuentemente en dispositivos de almacenamiento ópticos y para la comunicación óptica de alta velocidad.
Diodo térmico: Este término también se usa para los diodos convencionales usados para monitorear la temperatura a la variación de voltaje con la temperatura, y para refrigeradores termoeléctricos para la refrigeración termoeléctrica. Los refrigeradores termoeléctricos se hacen de semiconductores, aunque ellos no tienen ninguna unión de rectificación, aprovechan el comportamiento distinto de portadores de carga de los semiconductores tipo P y N para transportar el calor.
Fotodiodos : Todos los semiconductores están sujetos a portadores de carga ópticos. Generalmente es un efecto no deseado, por lo que muchos de los semiconductores están empacados en materiales que bloquean el paso de la luz. Los fotodiodos tienen la función de ser sensibles a la luz (fotocelda), por lo que están empacados en materiales que permiten el paso de la luz y son por lo general PIN (tipo de diodo más sensible a la luz). Un fotodiodo puede usarse en celdas solares, en fotometría o en comunicación óptica. Varios fotodiodos pueden empacarse en un dispositivo como un arreglo lineal o como un arreglo de dos dimensiones. Estos arreglos no deben confundirse con los dispositivos de carga acoplada.

Diodo con puntas de contacto: Funcionan igual que los diodos semiconductores de unión mencionados anteriormente aunque su construcción es más simple. Se fabrica una sección de semiconductor tipo n, y se hace un conductor de punta aguda con un metal del grupo 3 de manera que haga contacto con el semiconductor. Algo del metal migra hacia el semiconductor para hacer una pequeña región de tipo p cerca del contacto. El muy usado 1N34 (de fabricación alemana) aún se usa en receptores de radio como un detector y ocasionalmente en dispositivos analógicos especializados.
Diodo PIN : Un diodo PIN tiene una sección central sin doparse o en otras palabras una capa intrínseca formando una estructura p-intrínseca-n. Son usados como interruptores de alta frecuencia y atenuadores. También son usados como detectores de radiación ionizante de gran volumen y como fotodetectores. Los diodos PIN también se usan en la electrónica de potencia y su capa central puede soportar altos voltajes. Además, la estructura del PIN puede encontrarse en dispositivos semiconductores de potencia, tales como IGBTs, MOSFETs de potencia ytiristores.
Diodo Schottky : El diodo Schottky están construidos de un metal a un contacto de semiconductor. Tiene una tensión de ruptura mucho menor que los diodos pn. Su tensión de ruptura en corrientes de 1mA está en el rango de 0.15V a 0.45V, lo cual los hace útiles en aplicaciones de fijación y prevención de saturación en un transistor. También se pueden usar como rectificadores con bajas pérdidas aunque su corriente de fuga es mucho más alta que la de otros diodos. Los diodos Schottky son portadores de carga mayoritarios por lo que no sufren de problemas de almacenamiento de los portadores de carga minoritarios que ralentizan la mayoría de los demás diodos (por lo que este tipo de diodos tiene una recuperación inversa más rápida que los diodos de unión pn. Tienden a tener una capacitancia de unión mucho más baja que los diodos pn que funcionan como interruptores veloces y se usan para circuitos de alta velocidad como fuentes conmutadas, mezclador de frecuencias y detectores.
Stabistor : El stabistor (también llamado Diodo de Referencia en Directa) es un tipo especial de diodo de silicio cuyas características de tensión en directa son extremadamente estables. Estos dispositivos están diseñados especialmente para aplicaciones de estabilización en bajas tensiones donde se requiera mantener la tensión muy estable dentro de un amplio rango de corriente y temperatura.
Diodo Varicap : El diodo Varicap conocido como diodo de capacidad variable o varactor, es un diodo que aprovecha determinadas técnicas constructivas para comportarse, ante variaciones de la tensión aplicada, como un condensador variable. Polarizado en inversa, este dispositivo electrónico presenta características que son de suma utilidad en circuitos sintonizados (L-C), donde son necesarios los cambios de capacidad.

Rectificador de media onda
El rectificador de media onda es un circuito empleado para eliminar la parte negativa o positiva de una señal de corriente alterna de lleno conducen cuando se polarizan inversamente. Además su voltaje es positivo.
Índice
[ocultar]
1 Polarización directa (V i > 0) 2 Polarización inversa (V i < 0) 3 Tensión rectificada 4 Rectificador de media onda con filtro RC (Diodo ideal) 5 Véase también 6 Enlaces Externos 7 Referencias
Polarización directa (Vi > 0)[editar]
En este caso, el diodo permite el paso de la corriente sin restricción. Los voltajes de salida y de entrada son iguales, la intensidad de la corriente puede calcularse mediante la ley de ohm.
Polarización inversa (Vi < 0)[editar]
En este caso, el diodo no conduce, quedando el circuito abierto. No existe corriente por el circuito, y en la resistencia de carga RLno hay caída de tensión, esto supone que toda la tensión de entrada estará en los extremos del diodo:1
Vo = 0Vdiodo = Vi
I = 0
Tensión rectificada[editar]
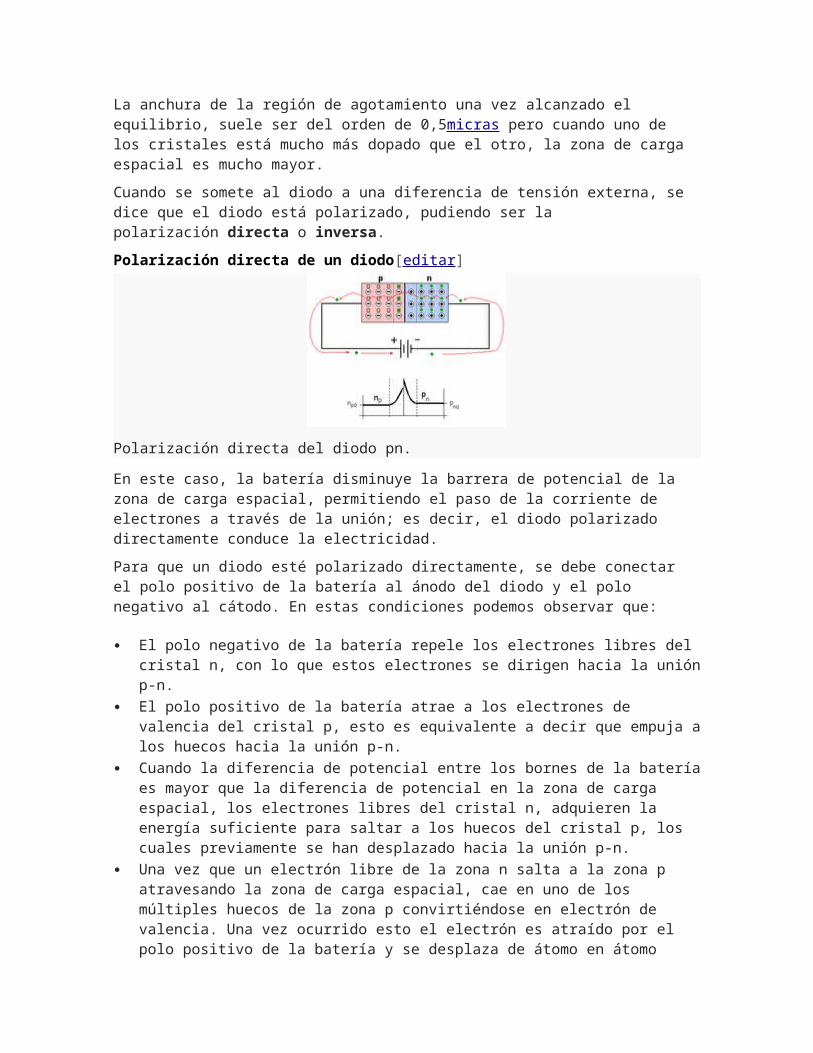
→ →
Rectificador de media onda con filtro RC (Diodo ideal)[editar]
Un circuito RC sirve como filtro para hacer que el voltaje alterno se vuelva directo casi como el de una batería, esto es gracias a las pequeñas oscilaciones que tiene la salida del voltaje, las cuales son prácticamente nulas.
La primera parte del circuito consta de una fuente de voltaje alterna, seguido de un diodo que en esta ocasión será ideal (simplemente para facilitar la comprensión del funcionamiento) y finalmente el filtro RC.
Circuito rectificador con filtro
El circuito funciona de la siguiente manera:
1. Entra la señal alterna al circuito, la cual se rectifica con el diodo. (Solo permite pasar un semi-ciclo de la señal, que en este caso es el semi-ciclo positivo)
2. En el momento que el voltaje sale del diodo el condensador se empieza a cargar y la caída de voltaje se recibe en la resistencia.
3. En el entender que es lo que está pasando y como calcular el filtro.
Señal con rectificador y filtro

Rectificador de onda completa
Un rectificador de onda completa es un circuito empleado para convertir una señal de corriente alterna de entrada (Vi) en corriente continua de salida (Vo) pulsante. A diferencia del rectificador de media onda, en este caso, la parte negativa de la señal se convierte en positiva o bien la parte positiva de la señal se convertirá en negativa, según se necesite una señal positiva o negativa de corriente continua.
Existen dos alternativas, bien empleando dos diodos o empleando cuatro (puente de Graetz).
Rectificador con dos diodos
En el circuito de la figura, ambos diodos no pueden encontrarse simultáneamente en directa o en inversa, ya que las diferencias de potencial a las que están sometidos son de signo contrario; por tanto uno se encontrará polarizado inversamente y el otro directamente. La tensión de entrada (Vi) es, en este caso, la media de la tensión del secundario del transformador.
Tensión de entrada positiva
El diodo 1 se encuentra en polarización directa(conduce), mientras que el 2 se encuentra en inversa (no conduce). La tensión de salida es igual a la de entrada.Nota:los diodos en posición directa conducen altas corrientes,en posición inversa alta tensiones.
Tensión de entrada negativa

El diodo 2 se encuentra en polarización directa (conduce), mientras que el diodo 1 se encuentra en polarización inversa (no conduce). La tensión de salida es igual a la de entrada pero de signo contrario. El diodo 1 a de soportar en inversa la tensión máxima del secundario .
Puente de Graetz o Puente Rectificador de doble onda
En este caso se emplean cuatro diodos con la disposición de la figura. Al igual que antes, sólo son posibles dos estados de conducción, o bien los diodos 1 y 3 están en directa y conducen (tensión positiva) o por el contrario son los diodos 2 y 4 los que se encuentran en directa y conducen (tensión negativa).
A diferencia del caso anterior, ahora la tensión máxima de salida es la del secundario del transformador (el doble de la del caso anterior), la misma que han de soportar los diodos en inversa, al igual que en el rectificador con dos diodos. Esta es la configuración usualmente empleada para la obtención de onda continua.
Tensión rectificada
Vo (corriente continua de salida) = Vi ( corriente alterna de entrada) = Vs/2 en el rectificador con diodos.Vo = Vi = Vs en el rectificador con puente de Graetz.
Si consideramos la caída de tensión típica en los diodos en conducción, aproximadamente 0,6V; tendremos que para el caso del rectificador de doble onda la Vo = Vi - 1,2V.

Multiplicador de tensión
Multiplicador de tensión con una fuente de 220 VCA.
Multiplicador de tensión de cuatro etapas.
Un Multiplicador de tensiónes un circuito eléctrico que convierte tensión desde una fuente de corriente alterna a otra de corriente continua de mayor voltaje mediante etapas de diodos y condensadores.
Funcionamiento
La figura muestra un multiplicador de tensión con diodos ideales y condensadores de capacidad infinita. Las cifras en rojo muestran los valores de tensión alterna (RMS), mientras que las negras son la componente continua en cada etapa. Evidentemente, invirtiendo los diodos se obtienen tensiones negativas.

Advertencia: Un multiplicador de tensión sin cargar con una impedancia se comporta como un condensador, pudiendo proporcionar transitorios de elevada corriente, lo que los hace peligrosos cuando son de alta tensión. Habitualmente se agrega una resistencia en serie con la salida para limitar este transitorio a valores seguros, tanto para el propio circuito como ante accidentes eventuales.
Voltaje de ruptura
Mientras esta configuración puede ser utilizada para generar miles de voltios a la salida, los componentes de las etapas individuales no requieren soportar toda la tensión sino solo el voltaje entre sus terminales, esto permite aumentar la cantidad de etapas según sea necesario sin aumentar los requerimientos individuales de los componentes.Lo cual es una gran ventaja en la producción de este tipo de circuitos que son de un muy gran provecho.
Usos[editar]
Este circuito se utiliza para la generación del alto voltaje requerido en los tubos de rayos catódicos,tubos de rayos X, para alimentar fotomultiplicadores para detectores de rayos gamma. También se utiliza para la generación de altos voltajes para experimentos de física de alta energía.
Diodo Zener
(Redirigido desde «Estabilizador Zener»)
Diodo Zener
Pequeño diodo Zener
Tipo Semiconductor
Símbolo electrónico
Configuración Ánodo y Cátodo (se polariza inversamente, con respecto al diodo convencional)

[editar datos en Wikidata]
El diodo Zener es un diodo de cromo 1 que se ha construido para que funcione en las zonas de rupturas, recibe ese nombre por su inventor, el Dr.Clarence Melvin Zener. El diodo Zener es la parte esencial de los reguladores de tensión casi constantes con independencia de que se presenten grandes variaciones de la tensión de red, de la resistencia de carga y temperatura.
Son mal llamados a veces diodos de avalancha, pues presentan comportamientos similares a estos, pero los mecanismos involucrados son diferentes. Además si el voltaje de la fuente es inferior a la del diodo éste no puede hacer su regulación característica.
Características
Si a un diodo Zener se le aplica una tensión eléctrica positiva del ánodo respecto a negativa en elcátodo (polarización directa) toma las características de un diodo rectificador básico (la mayoría de casos), pero si se le suministra tensión eléctrica positiva de cátodo a negativa en el ánodo(polarización inversa), el diodo mantendrá una tensión constante. No actúa como rectificador sino como un estabilizador de tensión
En conclusión: el diodo Zener debe ser polarizado inversamente para que adopte su característica de regulador de tensión. En la siguiente figura se observa un circuito típico de su uso como regulador de tensión:
Variando la tensión V a valores mayores que la tensión de ruptura del zener, Vz se mantiene constante.
Su símbolo es como el de un diodo normal pero tiene dos terminales a los lados. Se deberá tener presente, que el diodo zener al igual que cualquier dispositivo electrónico, tiene limitaciones y una de ellas es la disipación de potencia, si no se toman en consideración sus parámetros, el componente se quema.

UN ECUALIZADOR PARAMETRICO SE CARACTERIZA POR POSEER FRECUENCIA DE CORTE, GANANCIA Y Q VARIABLES, NORMALMENTE SE DISPONEN 3 CORTES (BAJOS MEDIOS Y ALTOS ) EL PRIMERO Y EL ULTIMO DE TIPO BAXANDALL O UN SIMPLE CONTROL DE TONOS Y EL DE MEDIOS PARAMETRICO PARA UNA MAYOR FLEXIBILIDAD. COMO CONTRAPARTIDA TENEMOS LOS ECUALIZADORES GRAFICOS QUE SON UN CONJUNTO DE FILTROS DE Q Y FRECUENCIA CONSTANTE Y GANANCIA AJUSTABLE, DISTRIBUIDOS A OCTAVA O 1/3 DE OCTAVA PASABANDA , EL FILTRO CON FRECUENCIA DE CORTE MAS BAJO ES EN PASABAJOS , EL DE FRECUENCIA MAS ALTA ES UN PASAALTOS Y LOS INTERMEDIOS SON PASABANDA. LA DENOMINACION GRAFICO VIENE POR LA DISPOSICION DE LAS PERILLAS DE LOS POTENCIOMETROS DESLIZABLES EN EL FRENTE DEL ECUALIZADOR QUE REFLEJA LA CURVA DE TRANSFERENCIA (APROXIMADAMENTE) DEL CONJUNTO.
CON RESPECTO A ACTIVO O PASIVO SE REFIERE A LA TECNOLOGIA Y GANANCIA. LOS ACTIVOS ESTAN HECHOS CON TRANSITORES O CIRCUITOS INTEGRADOS ,TAMBIEN EN UN PASADO VALVULAS TERMOIONICAS. Y POSEEN GANANCIA.
LOS PASIVOS SON REDES BASICAS REALIZADAS CON BOBINAS, RESISTENCIAS Y CAPACITORES (COMPONENTES PASIVOS) Y NO TIENEN GANANCIA SOLO ATENUACION)
POR ULTIMO EN CASI TREINTA AÑOS DE ELECTRONICA NUNCA ESCUCHE DE ECUALIZADOR MUDO.
TE RECOMIENDO EL QUE CUANDO LO ESCUCHES MAS TE GUSTE.
Pasivos son los ecualizadores que solamente recortan, quitan frecuencias. Los eq activos pueden tanto recortar como enfatizar.
El ecualizador se utiliza para modificar el corte de una señal haciendo de este modo que puedas mejorar o empeorar un sonido el ecualizador que tu mencionas es un ecualizador con ajustes precargados del mismo moto lo trae un estéreo pero para audio car venden ecualizadores que van después de la unidad principal con los cuales puedes mejorar mucho la frecuencia de la señal la gran mayoría son de ajuste manual no existe pop jazz es ajuste por medio de bandas y entre mayor sea el numero de bandas mejor será el ajuste que podrás realizar.Los ecualizadores se dividen princilpalmente en 2 tipos pasivos y activosPASIVO:Son aquellos que casi todas sus partes son resistencia y no tienen ningun transistorACTIVOS:Como su nombre lo dice todods sus componentes son activos estos casi siempres se les denomina por los transistoresPARAMETRICO:El ecualizador paramétrico es un ecualizador que permite el control individual de tres parámetros por cada banda: su frecuencia central, su ganancia, y su ancho de banda.
Un ecualizador similar es el semi-paramétrico, que sólo presenta el control individual de dos parámetros (generalmente frecuencia central y ganancia), mientras que el tercero es fijo.

Éstos controlan los tres parámetros fundamentales, que son el ancho de banda, la frecuencia central y la amplitud de la señal. El manejo de éstos es más complejo, ya que hay que ajustar todos los parámetros.
Lo ideal en un ecualizador paramétrico es tener cuatro bandas de frecuencias sobre las que actuar, bajas frecuencias (20 a 250Hz), media baja (250 a 2.000Hz), media alta (2000 a 4.000Hz) y altas (4.000 a 16.000).
Si modificamos cualquier frecuencia también modificamos su respuesta de fase. Imaginen entonces una ecualización importante en varias frecuencias a la hora de sonorizar un evento, la respuesta de fase del sistema se vería fuertemente alterada. Esto es debido al efecto que producen los filtros sobre la fase, recordemos que un ecualizador gráfico no es más que un conjunto de filtros pasa-banda.
Por ello, si el sistema de sonido esta bien ajustado, no hará falta tocar el ecualizador gráfico, y por este motivo observamos que la mayoría de ecualizadores gráficos en los conciertos en directo están totalmente planos.DIGITALES:
Circuito Lógico es aquél que maneja la información en forma binaria, o sea con valores de "1" y "0".
Estos dos niveles lógicos de voltaje fijos representan:
"1" nivel alto o "high"."0" nivel bajo o "low".
Los hay analógicos y digitales, pasivo activo, paramétricos, gráficos y paragráficos. Los ecualizadores profesionales suelen tener, al menos, 5 bandas.
Estas bandas de frecuencias básicas son controladas por un fader (u otro potenciómetro o control alternativo) que puede atenuar o introducir ganancia hasta en 12 dB, o aún más. Para evitar distorsión por saturación ("clipping"), cada fader cuenta con un diodo LED, que se enciende justo antes de que se recorte la señal.PERO LA PREGUNTA ¿NECESITO UN ECUALIZADOR EN EL AUTO?Esta es una pregunta que mucha gente que hace pero en si no se necesita forzosamente si no quieres que se mezclen las frecuencia serie una buena opcion pero los ecualizadores buenos son los de paso ya que los mudos solo tiene salida amplificada x4 pero de muy bjos wts asi que estoy casi no sirven en un buen equipo para un equipo de inicio o amateur es bueno pero los ecualizdores solo tiene una funcion en pocas palabras sacar el corte de frecuencia para cada amplificador ya que en su mayoria tiene para 3 amplificadores un rear , fron y los woofers asi sacas solo las frecuencias que quieres y se lo mandas exclusivamente a cada amplificador pero una buena unidad principal puede hacer eso asi que todo depénde de cada quien por que un ecualizador no sube el volumen solo lo acomoda.son los mismos db decibeles.
Ecualizador Un ecualizador es un aparato que nos permite cambiar el volumen de unas
frecuencias sin necesidad de alterar el de otras frecuencias, es decir, podemos

conseguir más graves sin subir también los agudos, o podemos subir unos y bajar otros. Veremos sus parámetros y los diferentes tipos de ecualizador que existen, tanto por su utilización como por su diseño y electrónica.
Un concepto muy importante a la hora de usar y entender un ecualizador va a ser el de la frecuencia de corte o frecuencia central, porque al conocer ésta frecuencia sabremos si estamos afectando a los graves, medios o agudos. Después de la frecuencia de corte debemos saber que existen diferentes formas de ecualizar: dependiendo de si afectamos a las frecuencias mayores o menores que la frecuencia de corte, y dependiendo de la forma de cambiar el volumen, diremos que hay varios tipos de ecualizaciones. Veamos primero los filtros, que son ecualizadores que se usan para deshacerse de las frecuencias que nos molestan, son por tanto bastante radicales:
Filtros · Filtro pasa bajos: es un ecualizador que elimina las frecuencias más agudas que
la frecuencia de corte. El nombre no habla de lo que quita, sino de lo que deja pasar sin atenuación, los bajos, los sonidos graves. Normalmente se escribe con las siglas del nombre en inglés: LPF (Low Pass Filter).
· Filtro pasa altos: ahora eliminaremos las frecuencias más graves que la frecuencia de corte, de nuevo el nombre nos dice que los agudos pasan intactos. Lo encontraremos como HPF (High Pass Filter).
· Filtro pasa banda: éste es una combinación de los dos anteriores, ya que vamos a eliminar las frecuencias mayores y menores que la frecuencia de corte, quedándonos solo con los sonidos que haya alrededor de ésta frecuencia. La abreviatura será BPF (Band Pass Filter).
· Filtro elimina banda: otra combinación de los dos primeros, ahora lo que conseguimos es eliminar la frecuencia de corte y algunas más a su alrededor, dejando el resto de frecuencias intactas. En inglés se llama band-stop filter o band-reject filter. Cuando la precisión es muy grande y se eliminan muy pocas frecuencias se llama filtro notch, o notch filter.
* Para entender estos filtros tendremos que acercarnos al concepto de pendiente de corte: cuando decimos que eliminamos unas frecuencias a partir de un punto no estamos siendo muy exactos. Digamos mejor que a partir de un punto el volumen empieza a descender, y de manera gradual las frecuencias van atenuandose hasta desaparecer; y la pendiente de éste descenso es lo que llamamos pendiente de corte. Se expresa en decibelios por octava, y los valores que encontraremos normalmente son 6 dB/Oct (o de primer orden), 12 dB/Oct (o de segundo orden), 18 dB/Oct (o de tercer orden), y así sucesivamente. También existen los filtros de 3 dB/Oct, son los que producen un cambio más natural, mientras que los de mayor pendiente suenan más artificiales.
* Los filtros siempre han sido una herramienta muy necesaria en toda la electrónica (no solo en el audio), y parece que son unos circuitos complicados de diseñar y fabricar. Cuando los componentes electrónicos no estaban tan perfeccionados como lo están ahora, aparecía un problema al aumentar la pendiente de corte: en la frecuencia de corte se experimentaba un aumento de volumen accidental, que se llamó resonancia. Aunque desde hace bastante tiempo éste ha sido un problema de fácil solución, los diseñadores de sintetizadores siguieron utilizando filtros resonantes para hacer “ecualización creativa”, de esta forma pueden transformar redicalmente un sonido bastante simple en otro más complejo. La resonancia se mide en decibelios, ya que símplemente añade ganancia a la frecuencia de corte justo antes de que el filtro comience a atenuar.

* Es cierto que en un estudio de sonido sólo se suelen usar los filtros pasa altos y pasa bajos, y muy raramente los filtros notch. Los otros filtros se usan en los sintetizadores y samplers para transformar los sonidos y crear efectos bastante radicales. Y todavía hay otro tipo de filtro que se usa en la creación de sonidos sintéticos o electrónicos: el filtro peine o comb filter. Como su nombre indica parece un peine al representarse en un analizador de espectro, y lo que hace es atenuar unas frecuencias y amplificar otras, repitiendo estas subidas y bajadas periódicamente. El nivel de amplificación y atenuación se suele controlar con la resonancia. Es un filtro con un sonido muy metálico.
De vuelta al mundo del estudio de sonido, encontraremos unos ecualizadores mucho más sutiles, que no utilizan filtros sino ecualización paramétrica. Veamos primero cómo al suavizar lo que hacían los filtros nos encontramos con tres nuevos tipos de ecualizador:
Tres Ecualizadores en el Paramétrico · La ecualización tipo shelving (estante en español, aunque no se usa la
traducción) podría verse como una forma sutil de los filtros pasa altos y pasa bajos, dándonos además la posibilidad de aumentar el volumen, no solo de disminuirlo. Por tanto es un ecualizador que afecta a las frecuencias que están por encima (en un shelving de agudos) o por debajo (en un shelving de graves) de la frecuencia de corte. Cuando vemos un ecualizador sencillo de un equipo doméstico, suele tener dos controles: graves y agudos, se trata de dos shelving con los que podemos amplificar o atenuar los graves con uno, y los agudos con el otro.
· Un ecualizador de campana (normalmente se llama bell, aunque como es el más común, si no se especifica el tipo será porque nos referimos a éste) afecta a la frecuencia de corte sobre todo, y según nos alejamos de ella (con mayores o menores frecuencias) el cambio va disminuyendo hasta hacerse igual a cero.
Estos tres ecualizadores se llaman paramétricos porque los utilizamos variando tres parámetros muy importantes: frecuencia, ganacia y factor Q. Los dos primeros se explican por si solos, y la Q hace referencia a la calidad del circuito. En electrónica, la calidad de un ecualizador se refleja en su precisión, si afecta a muy pocas frecuencias se dice que tiene mejor calidad que otro que ecualiza a más frecuencias alrededor de la frecuencia de corte. El factor Q nos habla de la cantidad de frecuencias que se ven afectadas, o visto de otra forma, de la pendiente que tiene la curva de ecualización. También se le llama ancho de banda.
Por favor deja un voto o comentario, es lo único que obtengo del blog. Ecualizadores Analógicos Hoy en día nos muchos hemos acostumbrado a ecualizar en los programas de
edición y mezcla de sonido, usando plug-ins que muchas veces nos dicen que emulan antiguos aparatos analógicos. Si ahora los emulan ¿será porque sonaban mejor? Vamos a ver cómo son éstos ecualizadores analógicos: primero debemos saber que si nos fijamos en la electrónica, existen dos formas muy distintas de hacer un ecualizador, y por tanto dos tipos de ecualizador con diferencias importantes:
· El ecualizador pasivo es el de invención más antigua, se construye usando resistencias, condensadores y bobinas, y tiene la particularidad de no necesitar alimentación eléctrica ya que no consume energía. Su sonido es el más apreciado por los profesionales ya que permite utilizar unos trucos que producen unas ecualizaciones muy musicales, imposibles de emular con otros ecualizadores o plug-ins. Los problemas que tienen se centran también en su construcción y

diseño: al usar bobinas hacen necesaria la construcción y reglaje manual, aparato por aparato, lo que encarece muchísimo el producto final. También funcionan de una forma especial: el circuito atenúa la señal de entrada un número arbitrario de decibelios (por ejemplo -18 dB), de modo que si ecualizamos los graves con +10 dB de ganancia tendremos que a la salida los graves solo habrán bajado -8 dB (-18 + 10 = -8). Y si ecualizamos los agudos con -4 dB, tendremos que a la salida los agudos presentarán una atenuación de – 22 dB. En el ecualizador que estamos usando como ejemplo encontraríamos un amplificador de ganancia fija en la salida para aumentar en 18 dB el nivel después de la ecualización. Como sólo usamos un amplificador (que sí necesita alimentación) en la salida, y el circuito de ecualización suele ser bastante sencillo y con pocos componentes, estaremos introduciendo muy poco ruido y distorsión en la señal. Suelen ser aparatos muy caros, por lo que se encuentran en los estudios más exclusivos, y también en los estudios de masterización, donde la calidad siempre es lo primero.
* El truco que mencionaba antes es un poco extraño: usando dos bandas de ecualización en frecuencias muy próximas, se da ganancia positiva en una banda, y negativa en la otra. Esto produce una ecualización totalmente exclusiva de estos aparatos, que produce una curva de ecualización muy especial y musical.
· El ecualizador activo es el más común, principalmente porque es el más barato de construir y mantener y con un buen diseño electrónico puede sonar muy bien. En su construcción se utilizan condensadores, resistencias y multitud de amplificadores (normalmente operacionales) por lo que necesita una alimentación eléctrica constante para funcionar. Éstos dos factores (el uso de tantos amplificadores y su alimentación) puede producir ruido y distorsión en la salida del aparato, por eso es necesario un diseño muy cuidadoso de las fuentes de alimentación y de los circuitos de amplificación. Al contrario que con los ecualizadores pasivos el nivel de la señal se mantiene a lo largo del circuito. Prácticamente todos los ecualizadores analógicos del mercado actual son activos, para tener una idea de su calidad nos podemos guiar por el precio, aunque siempre existen excepciones.
En el artículo Ecualizando explico cómo utilizo el ecualizador para conseguir los mejores resultados y para educar el oído. También te recomiendo la lectura de los artículos: Definición de ecualizador y Procesando en paralelo.