Download - Monografia Equilibrio y Elasticidad

1
UNIDAD EDUCATIVA PARTICUAR BORJA
TERCER CURSO DE BACHILLERTAO
GENERAL UNIFICADO.
TÍTULO DE LA MONOGRAFÍA: Equilibrio y Elasticidad.
Monografía previa a
La obtención del
Título De Bachiller
Director:
Sr. Augusto Maruri
Autores:
Mateo Mendieta, Josué Segarra

2
Titulo.
Equilibrio y Elasticidad.
Antecedentes y justificación.
Nuestro trabajo en sí, se lo puede ver desde diferentes perspectivas, pero lo que
nosotros buscamos es poder contribuir a la sociedad en si de una manera más
objetiva y menos subjetiva, esto siendo mucho más pragmático en nuestro
tema, por lo tanto todo objeto de estudio servirá para una causa en el presente
o en nuestro futuro la cual ayuda a la sociedad en sí llenando los espacios vagos,
y así poder educar a la próxima generación, asimismo hemos decidido conocer
acerca del equilibrio y la elasticidad su importancia si se puede decir su
“conveniencia para los demás”, para esto hemos necesito varias horas de arduo
trabajo en el tema y ganas de hacerlo.
Objetivo General y Objetivos Específicos.
Buscamos poder comprender y aprender algunos conocimientos en el
margen de la física y así poder ayudar a la sociedad.
1. Indagar información sobre el tema.
2. Entender sobre los efectos que produce el equilibrio y la elasticidad
3. Ayudar a la sociedad en temas relacionados al equilibrio y la elasticidad.
3
Esquema Tentativo.
-Agradecimientos
Agradecemos profundamente a nuestros padres, ya que con su ayuda y su
dedicación nos han guiado y han hecho lo mejor posible que ha estado al
alcance de sus manos para nuestra mejor educación y bienestar, sin contar por
la oportunidad de permitirnos estar en esta institución, al igual a nuestro
Rector: padre José Rodríguez, a todas las autoridades presentes y a nuestro
profesor Paulo Freire que a pesar de conocerle tan poco tiempo hemos sabido
respetar y admirar su trabajo como docente y sobre todo lo vemos como un
amigo , igualmente por su incondicional ayuda que nos ha brindado atreves de
este corto pero a la vez largo año lectivo.
Gracias a la ayuda de varias familiares, amigos, colegas, etc. Hemos podido
juntar información acerca de este tema y así poder continuar con nuestra labor
en calidad de estudiante.
Finalmente agradecemos sin falta a nuestro también director y tutor de
monografía Augusto Maruri por dirigir nuestra enseñanza para una entrada
prospera a la universidad y sobre todo quisiéramos recalcar su infinita paciencia
y determinación para poder conseguir esta tan preciado título de bachiller este
determinado tema.
4
Sin más que decir esperamos ser de gran ayuda a la sociedad en sí y poder
aportar con un granito de arena, para poder dejar en alto el nombre de nuestra
institución al igual que nuestras familias.
-Dedicatoria
Bueno como todo trabajo tenemos nuestra motivación y para quien va dirigido,
pero en este caso nuestro trabajo está orientado al público en general y toda
relación con la física, y su estudio para la cual les sirva nuestra información que
hemos recapitulada, investigada he indagada a partir de varias fuentes y con la
ayuda de nuestros guías y profesores.
INDICE-Introducción................................................................................................................................5
Titulo 1: Equilibrio........................................................................................................................7
La Primera Ley de Newton – La ley de la Inercia.....................................................................8
Segunda ley de Newton............................................................................................................8
Tercera ley de Newton.............................................................................................................9
Equilibrio dinámico:.................................................................................................................9
Equilibrio estático.......................................................................................................................11
Equilibrio estable....................................................................................................................12
Equilibrio inestable.................................................................................................................12
Equilibrio indiferente.............................................................................................................12
Equilibrio de sólidos suspendidos..........................................................................................12
Fuerzas angulares..................................................................................................................13
Fuerzas coloniales..................................................................................................................13
Fuerzas paralelas....................................................................................................................13
Primera condición de equilibrio.............................................................................................13
Segunda condición de equilibrio............................................................................................14
Titulo 2: Elasticidad....................................................................................................................14
5
Esfuerzos................................................................................................................................14
Deformaciones.......................................................................................................................17
Ley de Hooke..........................................................................................................................19
Características elásticas de un material.................................................................................20
Energía de Deformación.........................................................................................................22
Fuerzas Intermoleculares......................................................................................................23
Problemas aplicando elasticidad............................................................................................24
-Introducción
Equilibrio:
Es el estado mediante el que la persona se mueve y durante este movimiento
modifica constantemente su centro de gravedad y su sustentación. Con una
importancia más directa sobre la mayoría de los deportes, se define como la
capacidad de mantener la posición correcta que exige la actividad física, a pesar
de la fuerza de la gravedad.
Un equilibrio dinámico ocurre cuando dos procesos reversibles ocurren al
mismo paso.
Un ejemplo del proceso puede ser imaginado con un recipiente lleno de agua
que se coloca en un cuarto pequeño. El agua del recipiente evapora, y el aire en
el cuarto se empieza a saturar del vapor de agua. Eventualmente, el aire en el
cuarto será completamente saturado y el nivel de agua en el cubo parará
completamente. Sin embargo, el agua en el recipiente sigue evaporando. Lo que
6
está pasando es que las moléculas de agua en el aire, de vez en cuando se
chocan contra la superficie del agua y se vuelven a condensar. Esto ocurre al
mismo paso al que el agua se evapora del cubo. Este es en un ejemplo del
equilibrio dinámico porque el paso de evaporación es igual al paso de la
condensación.
El concepto del equilibrio dinámico no es limitado a los simples cambios de
estado. Con frecuencia está aplicado al análisis cinético de reacciones químicas
para obtener información útil sobre la proporción de reactivos y productos que
formarán el equilibrio. Debería ser notado que en un equilibro las
concentraciones de los reactivos y las concentraciones de los productos son
constantes.
Elasticidad:
En física el término elasticidad designa la propiedad mecánica de ciertos
materiales de sufrir deformaciones reversibles cuando se encuentran sujetos a
la acción de fuerzas exteriores y de recuperar la forma original si estas fuerzas
exteriores se eliminan. La elasticidad es estudiada por la teoría de la elasticidad,
que a su vez es parte de la mecánica de sólidos deformables. La teoría de la
elasticidad (TE) como la mecánica de sólidos (MS) deformables describe cómo
un sólido (o fluido totalmente confinado) se mueve y deforma como respuesta a
fuerzas exteriores. La diferencia entre la TE y la MS es que la primera solo trata
sólidos en que las deformaciones son termodinámicamente reversibles y en los

7
que el estado tensiones en un punto en un instante dado dependen solo de
las deformaciones en el mismo punto y no de las deformaciones anteriores (ni
el valor de otras magnitudes en un instante anterior).
Titulo 1: Equilibrio.Para poder comenzar de equilibrio tenemos que entender el concepto y su
aplicación en la física antigua y moderna, como ya hemos dicho antes el
equilibrio se lo puede definir como el mantenimiento adecuado de la
posición de las distintas partes del cuerpo y del cuerpo mismo en el espacio.
En la cual hay varios tipos de clases de equilibrio con respecto al cuerpo y a
las fuerzas que actúan sobre el cuerpo: (dinámico y estático).
Además de un entendimiento adecuado de lo que es equilibrio tendremos
que ver por qué y el cómo, sin contar con su relación con las leyes de
Newton. Concluyendo este pequeño introito les hablaremos primero sobre
Newton y sus leyes, pero al ser la ley de la inercia la más ligada nos
enfocaremos más en dicho tema.

8
La Primera Ley de Newton – La ley de la InerciaSe define a la inercia como una resistencia natural de los cuerpos a las
alteraciones en su estado de equilibrio, esta primera ley de newton está muy
ligada a los cuerpos en equilibrio.
Al igual que la inercia, muchas veces las fuerzas resultantes se anulan,
resultando un equilibrio y en otros casos los resultados de fuerzas que
actúan sobre un cuerpo es diferente a cero y a esto podemos llamarlo fuerza
resultante. Ya que la fuerza es una magnitud vectorial, no podemos
determinar la fuerza resultante utilizando el proceso del algebra al que
estamos acostumbrados si no tenemos que conocer el proceso matemático
llamado suma vectorial.
Encontramos ciertos casos sobre la fuerza resultante:
Caso 1- fuerzas con la misma dirección y sentido
Caso2-Fuerzas perpendiculares
Caso3-Fuerzas con la misma dirección y sentidos opuestos
Caso4-caso general-ley de cosenos
Segunda ley de Newton.La Segunda ley de Newton se encarga de cuantificar el concepto de fuerza. Nos
dice que la fuerza neta aplicada sobre un cuerpo es proporcional a la
aceleración que adquiere dicho cuerpo. La constante de proporcionalidad es la
masa del cuerpo, de manera que podemos expresar la relación de la siguiente
manera:

9
F=m*a
Tanto la fuerza como la aceleración son magnitudes vectoriales, es decir, tienen,
además de un valor, una dirección y un sentido.
Tercera ley de Newton
La tercera ley, también conocida como Principio de acción y reacción nos dice
que si un cuerpo A ejerce una acción sobre otro cuerpo B, éste realiza sobre A
otra acción igual y de sentido contrario.
Esto es algo que podemos comprobar a diario en numerosas ocasiones. Por
ejemplo, cuando queremos dar un salto hacia arriba, empujamos el suelo para
impulsarnos. La reacción del suelo es la que nos hace saltar hacia arriba.
Cuando estamos en una piscina y empujamos a alguien, nosotros también nos
movemos en sentido contrario. Esto se debe a la reacción que la otra persona
hace sobre nosotros, aunque no haga el intento de empujarnos a nosotros.
Hay que destacar que, aunque los pares de acción y reacción tengan el mismo
valor y sentidos contrarios, no se anulan entre sí, puesto que actúan sobre
cuerpos distintos.
Equilibrio dinámico:
El equilibrio dinámico es el estado mediante el que la persona se mueve y
durante este movimiento modifica constantemente su centro de gravedad y su
sustentación. Además un equilibrio dinámico ocurre cuando dos procesos
reversibles ocurren al mismo paso. El equilibrio comienza con newton y su

10
primera ley que no es nada más y nada menos que la inercia en la cual nos
habla que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea en
reposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza
o una serie de fuerzas cuyo resultante no sea nulo sobre él. La primera ley de
Newton sirve para definir un tipo especial de sistemas de referencia conocidos
como Sistemas de referencia inerciales, que son aquellos sistemas de referencia
desde los que se observa que un cuerpo sobre el que no actúa ninguna fuerza
neta se mueve con velocidad constante.
En realidad, es imposible encontrar un sistema de referencia inercial, ya que
siempre hay algún tipo de fuerzas actuando sobre los cuerpos, no obstante
siempre es posible encontrar un sistema de referencia en el que el problema
que estemos estudiando se pueda tratar como si estuviésemos en un sistema
inercial. Pero para que haya equilibrio, las componentes horizontales de las
fuerzas que actúan sobre un objeto deben cancelarse mutuamente, y lo mismo
debe ocurrir con las componentes verticales. Esta condición es necesaria para el
equilibrio, pero no es suficiente. Un claro ejemplo del equilibrio dinámico es
Cuando vamos en un coche y se frena bruscamente o cuando se toma una
curva, notamos que sobre nosotros actúa una fuerza dirigida en sentido
contrario al movimiento que nos impulsa la cabeza. Este fenómeno se observa
siempre que un sistema esté sometido a una aceleración y en él existen partes
móviles (que pueden moverse con mayor o menor grado de libertad). A esas
fuerzas aparentes se las llama fuerzas de inercia. Entonces podemos decir que
11
Siempre que una fuerza produzca una aceleración a un sistema, se originará en
las partes móviles del mismo otra fuerza igual y opuesta a la primera.
En dinámica existen tres leyes en las que todo el estudio del movimiento puede
ser resumido. Estas son las conocidas “Leyes de Newton”
I. Primera Ley de Newton – Ley de Inercia
II. Segunda Ley de Newton – Principio fundamental de la dinámica
III. Tercera Ley de Newton – Ley de acción y reacción
La primera ley de Newton describe lo que sucede con los cuerpos que
están en equilibrio. La segunda ley explica lo que sucede cuando no
existe equilibrio y la tercera ley muestra como es el comportamiento de
las fuerzas cuando tenemos dos cuerpos interactuando entre sí.
Para comprender mejor estas leyes, es preciso conocer algunos
conceptos físicos muy importantes como la fuerza de equilibrio.
Equilibrio estático
Es cuando en el sistema de equilibrio las fuerzas totales que actúan sobre el
cuerpo y en el momento resultante son nulas, en otras palabras es cunado el
cuerpo permanece en estado de reposo o de movimiento rectilíneo uniforme.
Se pueden apreciar 3 tipos de equilibrio:

12
Equilibrio estable
El equilibrio es estable si el cuerpo, siendo apartado de su posición de equilibrio,
vuelve al puesto que antes tenía, por efecto de la gravedad. En este caso el centro de
gravedad está debajo del punto de suspensión.
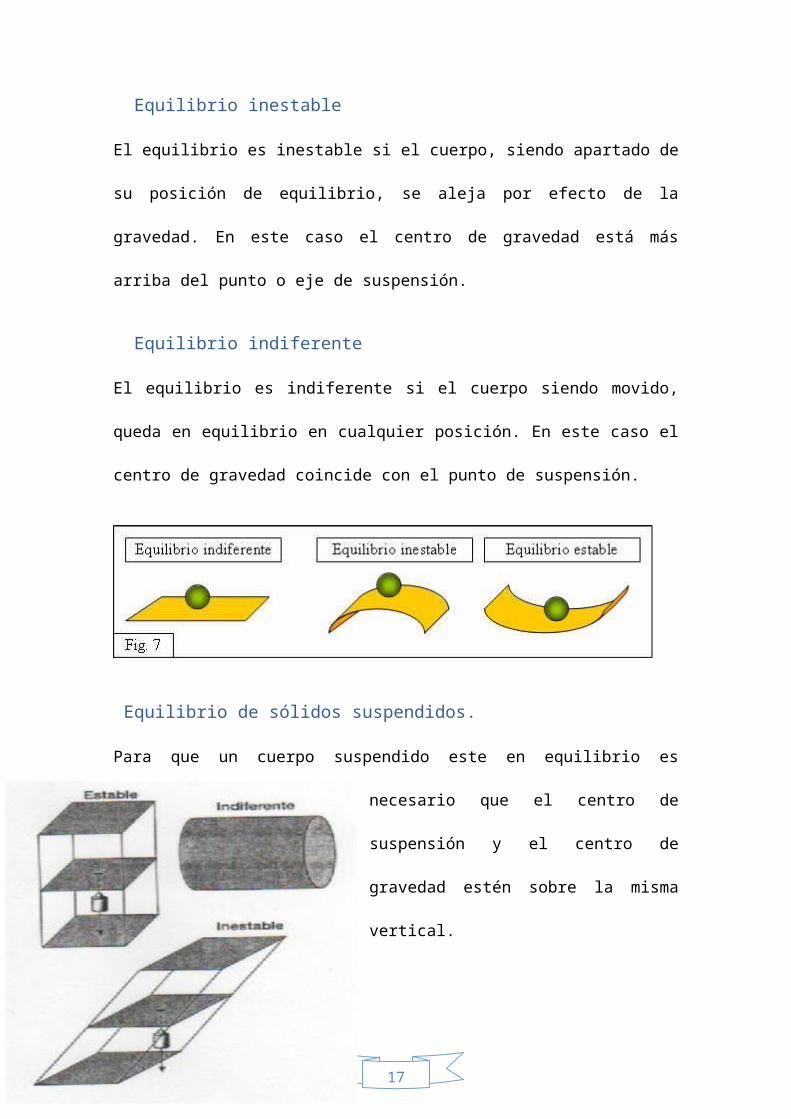
Equilibrio inestable
El equilibrio es inestable si el cuerpo, siendo apartado de su posición de equilibrio, se
aleja por efecto de la gravedad. En este caso el centro de gravedad está más arriba del
punto o eje de suspensión.
Equilibrio indiferente
El equilibrio es indiferente si el cuerpo siendo movido, queda en equilibrio en cualquier
posición. En este caso el centro de gravedad coincide con el punto de suspensión.
Equilibrio de sólidos suspendidos.
Para que un cuerpo suspendido este en
equilibrio es necesario que el centro de
suspensión y el centro de gravedad estén sobre
la misma vertical.

13
Es estable cuando el centro de suspensión está por encima del dentro de
gravedad.
además si el centro de gravedad está por encima del centro de suspensión será
inestable.
Pero si el centro de gravedad y el centro de suspensión coinciden será un
equilibrio indiferente.
Fuerzas angulares
Se dice que dos fuerzas son angulares cuando actúan sobre un
mismo punto formando un ángulo.
Fuerzas colonialesFuerzas colonial es la recta de acción es la misma, pero las
fuerzas pueden estar en la misma dirección o en direcciones
opuestas.
Fuerzas paralelasDos fuerzas son paralelas cuando sus direcciones son paralelas, es
decir, las rectas de acción son paralelas, pudiendo también
aplicarse en la misma dirección o en sentido contrario.
Primera condición de equilibrio La primera condición de equilibrio indica que un cuerpo está en equilibrio de traslación si la
resultante de todas las fuerzas es cero.

14
Segunda condición de equilibrio
La segunda condición de equilibrio indica que un cuerpo está en equilibrio rotacional si la suma
de los momentos de torsión o torcas de las fuerzas que actúan sobre él respecto a cualquier
punto es cero.
Titulo 2: Elasticidad.Siempre se ha hablado de un cuerpo o agregado de partículas, o más bien
moléculas, lo hemos supuesto rígido o indeformable. Sin embargo, ningún
cuerpo en la naturaleza es perfectamente rígido y todos se deforman en mayor
o menor grado bajo la acción de las fuerzas aplicadas a los distintos cuerpos. En
cierta cantidad los cuerpos deformados retornan a su forma y dimensiones
originales al suprimirse dichas fuerzas.
En otras ocasiones si las fuerzas aplicadas han sido suficientemente intensas,
subsiste una deformación permanente al suprimirlas. Se dice entonces que se
ha sobrepasado el límite elástico del material. Esto ocurre fácilmente en las
substancias pastosas cuyo límite de elasticidad es tan bajo que basta una fuerza
pequeñísima para producir una deformación permanente.
EsfuerzosSe llama esfuerzo a la fuerza aplicada sobre un cuerpo con medida por unidad
de área. Por ejemplo, sobre un área A actúa una fuerza F, el esfuerzo seria:

15
Los esfuerzos deben medirse en dinas/cm2, newtons/m2, lb/pie2. Aunque en
algunas ocasiones se emplean unidades más pequeñas de área expresándose
por ejemplo en kg/mm2 o en lb/pulg2.
Cuando la fuerza es perpendicular a la superficie sobre la cual actúa se tiene un
esfuerzo normal y si es tangente a la superficie se tiene un esfuerzo tangencial.
Los esfuerzos normales pueden ser de dos clases: compresión o simplemente
presión si actúan de modo que tienden a reducir las dimensiones del cuerpo en
la dirección en que actúan; tensión si tienden a aumentarlas. A continuación
mencionaremos unos ejemplos:
-Una columna de un edificio está sometida a una comprensión.
-Un submarino sumergido está bajo la acción de la presión hidrostática.
-En el caso de un farol alumbrado público, el hilo o cable CB está sometido a
una tensión T y la viga AB a una fuerza de compresión F. Para obtener los
esfuerzos es necesario dividir las fuerzas por las
áreas transversales del hilo y la viga
respectivamente.

16
Todos los cuerpos en la superficie terrestre están sometidos sin excepción a una
presión que es la atmosférica.
Loa esfuerzos tangenciales suelen llamarse también esfuerzos cortantes o
cizallamientos. Por ejemplo:
-Si tenemos un libro grueso tal como un voluminoso diccionario (figura a) y le
aplicamos en una de sus frentes o tapas una fuerza F, paralela a ella, ejerciendo
la mesa sobre la cual reposa la fuerza -F sobre la otra tapa en virtud de la
fricción, observamos que pasa a la forma (figura b) bajo la acción del
cizallamiento aplicado, transformado su sección que sensiblemente es un
rectángulo, en un paralelogramo.
17
Podemos observar que no obstante, el volumen del cuerpo no ha cambiado, ya
que las áreas del rectángulo y el paralelogramo son iguales por tener la misma
base y la misma altura.
DeformacionesAhora examinaremos las deformaciones producidas por los esfuerzos
anteriores. Consideremos el alambre AB cuyo extremo A
esta fijo mientras que en B esta aplicada la fuerza F. Bajo la
acción de esta fuerza, que produce una tensión, el alambre se
alarga la longitud
BC= Δl.
Al mismo tiempo el diámetro del alambre sufre una
pequeña contradicción. En el caso de una columna
sometida a una comprensión su longitud disminuye mientras que su espesor
aumenta ligeramente.
Se llama DEFORMACION LINEAL: al aumento o disminución de longitud por
unidad de longitud que experimenta un cuerpo bajo la acción de una tensión o
una comprensión paralela a la longitud considerada. Designándola por (d)
tenemos que:

18
La deformación lineal es positiva si hay alargamiento, negativa si hay
contracción. Es un número abstracto porque es el cociente de dos números
concretos de la misma especie.
Análogamente pueden definirse la deformación superficial y la deformación
cubica.
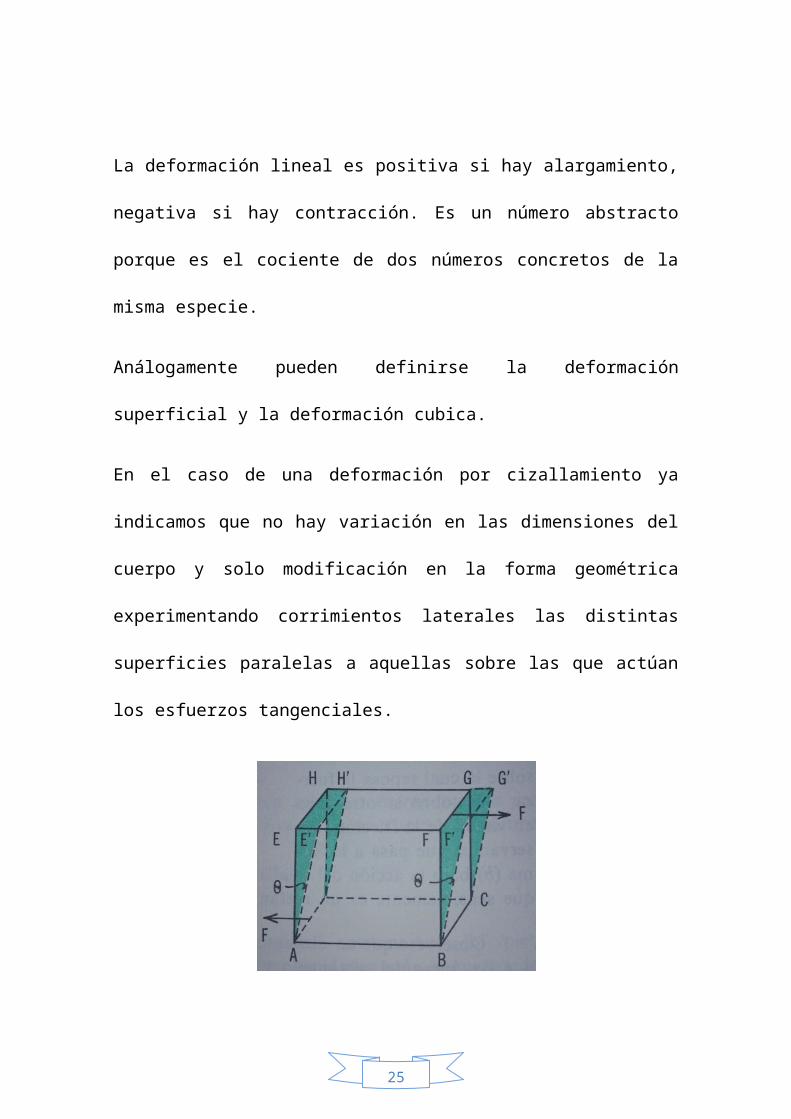
En el caso de una deformación por cizallamiento ya indicamos que no hay
variación en las dimensiones del cuerpo y solo modificación en la forma
geométrica experimentando corrimientos laterales las distintas superficies
paralelas a aquellas sobre las que actúan los esfuerzos tangenciales.

19
LA DEFORMACION POR CIZALLAMIENTO se mide por la relación entre el
desplazamiento relativo de dos superficies paralelas y la distancia que las
separa. En la figura, la superficie EFGH se ha desplazado la distancia EE1 con la
relación a ABCD.
Ley de HookeEntre los esfuerzos y las deformaciones existe una relación fundamentalísima
que se conoce con el nombre de ley de Hooke.
Los esfuerzos son siempre proporcionales a las deformaciones mientras no se
alcance el límite elástico del material.
Donde S es el esfuerzo, d la deformación y k una constante de proporcionalidad
llamada módulo de elasticidad. Despejando K tenemos:

20
Por tanto, el módulo de elasticidad de una substancia es la relación constante
entre los esfuerzos y las deformaciones correspondientes. Existen distintos
módulos de elasticidad según la clase particular de deformación que
consideremos.
En un alambre o en una varilla se llama MODULO DE YOUNG a la relación entre
el esfuerzo normal aplicado (tensión o compresión) y la deformación lineal
resultante. Se designa por Y:
Se llama módulo de rigidez a la relación entre el esfuerzo tangencial y la
deformación por cizallamiento.
Características elásticas de un material.Como se indicó anteriormente, la ley de Hooke es válida solamente cuando los
esfuerzos y deformaciones son inferiores a ciertos valores que definen el límite
de elasticidad del material.
Por ejemplo: si un alambre se somete cada vez a esfuerzos mayores, las
deformaciones correspondientes se ajustan a la ley de Hooke hasta llegar al

21
límite de elasticidad. A partir de ese punto, el cuerpo se hace más fácilmente
deformable volviéndose plástico. Si en esas condiciones se suprimen los
esfuerzos el cuerpo no recobra su forma primitiva quedando una deformación
permanente. Este es el caso precisamente de los llamados materiales plásticos,
que pueden moldearse fácilmente por compresión o tensión hasta que
adquieran la forma deseada. Si los esfuerzos continúan aumentando llega un
momento que el material se rompe: ese es el punto de ruptura.
Cuando un material elástico se ha sometido a esfuerzos durante un tiempo muy
largo, no recobra inmediatamente su forma antigua al desaparecer los esfuerzos
empleando algunas veces un intervalo de tiempo muy largo; este fenómeno se
denomina histéresis elástica.
Las características elásticas de un material suelen representarse gráficamente
tomando como abscisas las deformaciones y como ordenadas los esfuerzos,
resultando las curvas de elasticidad. La primera parte es recta y corresponde a
la zona de validez de la ley de Hooke. El punto A representa el límite de
elasticidad.

22
El conocimiento de las propiedades elásticas de un material es muy importante
para el ingeniero o arquitecto cuando diseña un edificio, un puente, una
estructura cualquiera, debe calcular previamente cuáles serán los esfuerzos a
que estarán sometidas cada una de sus partes para utilizar solo la cantidad
necesaria de material para que la estructura sea segura sin resultar un costo
alto.
La elasticidad es una propiedad íntimamente relacionada con la disposición de
las moléculas en el material y la naturaleza de las fuerzas que se ejercen entre
ellas.
Energía de DeformaciónPara deformar un cuerpo es necesario aplicar fuerzas que consecuentemente
realizan un trabajo durante el proceso se deformación. En consecuencia la
energía interna de un cuerpo aumenta al deformarlo.
Consideremos, por ejemplo, el caso de una varilla sometida a una tensión o una
comprensión longitudinal. La fuerza cuando la deformación lineal es Δl/l se
obtiene de:

23
Fuerzas IntermolecularesLas propiedades elásticas de un material están
estrechamente ligadas con las fuerzas intermoleculares
del mismo. La teoría que relaciona ambas
características físicas es relativamente compleja, pero
aquí trataremos de dar una explicación física de
carácter intuitivo. En un sólido para desplazar una
molécula de su posición de equilibrio, se requiere una
fuerza proporcional al desplazamiento, si en lugar de desplazar una sola
molécula se desplazan varias en una fila se produce un efecto acumulativo,
requiriéndose una fuerza total proporcional al desplazamiento total, que es en
esencia la ley de Hooke. Lógicamente, si la deformación es muy grande, resulta
una dislocación tal en la distribución espacial de las moléculas que se hace
imposible restablecer las condiciones originales produciéndose una
deformación permanente o aun una fractura. En el caso de los
materiales llamados comúnmente plásticos, la situación es ligeramente
diferente. En general, están formados por cadenas atómicas en las que las
fuerzas en una dirección son intensas (líneas solidas), pero en las direcciones
perpendiculares son débiles (líneas entrecortadas) Por tanto, es relativamente
fácil deformarlo en esas direcciones. Sin embargo, si por algún procedimiento se
refuerzan las fuerzas intermoleculares en algunos lugares en dirección
transversal se aumenta notablemente la rigidez.
24
Problemas aplicando elasticidad:
25
Conclusiones y Recomendaciones.
A lo largo de este corto periodo hemos podido observar sus diferentes usos y
aplicaciones, y sobre todo existe una gran ventaja al momento de adquirir, el
conocimiento acerca de este tema, ya que en nuestra rama pudimos darnos
cuenta la deficiencia que existe en ciertos conocimientos tanto físicos como
matemáticos y esperamos poder servir de ayuda a la sociedad.
Además que recomendamos al lector poder adquirir cierto conocimiento básico
en el tema para poder entenderlo de mejor manera, en la cual nos hemos
permitido tomarnos el tiempo de poder discernir entre buena información e
información basura. Concluyendo podemos decir que ha sido una gran
experiencia aportando a nuestro pueblo para que se eduque y seguir adelante.
Bibliografía.
Acosta, Alonso. Introducción a la Física. Bogotá: Ediciones Cultural, 1981.
http://www.efdeportes.com/efd130/la-coordinacion-y-el-equilibrio-en-el-area-de-educacion-fisica.htm
http://recursosparaeldeporte.blogspot.com/2010/12/equilibrios-estatico-y-dinamico.html
http://fisica.laguia2000.com/dinamica-clasica/leyes-de-newton/dinamica-las-leyes-de-newton
http://fisica1bgc.blogspot.com/p/leyes-de-newton.html
http://es.slideshare.net/RONALD10/primera-condicion-de-equilibrio-esttica
http://fisica.laguia2000.com/general/condiciones-de-equilibrio
http://personales.unican.es/junqueraj/JavierJunquera_files/Fisica-1/11.Estatica.pdf
http://es.slideshare.net/Diego_Valarezo/ejercicios-de-elasticidad-fsica

26
Perspectiva y procedimientos metodológicos.
Par esta monografía hemos utilizado varios métodos de consulta como son a nuestro tutor, libros y varias fuentes de internet. Hemos usado varios métodos para la realización de esta monografía como indagar a fondo los temas estudiados para una mejor elaboración de nuestra monografía.
Recursos Materiales.
Computadora
Internet
Impresora
Escáner
Libros acerca del tema-biblioteca
Cronograma
Cronograma de ActividadesActividad Enero Febrero Marzo Abril
Entrega de ante-proyectos
Primera Revisión del avance de los Capítulos.Segunda revisión del avance de los Capítulos.Tercera revisión del avance de los Capítulos.Entrega del trabajo monográfico.







