
Diseno optimo de sistemas dedistribucion
David Fernando Pinzon Suarez
Universidad Nacional de Colombia
Facultad de Ingenierıa, Departamento Ingenierıa Electrica
Bogota, Colombia
2014


Diseno optimo de sistemas dedistribucion
David Fernando Pinzon Suarez
Tesis o trabajo de grado presentada(o) como requisito parcial para optar al tıtulo de:
Master en Ingenerıa Electrica
Director(a):
M.s.c Henry Navarro Sanchez
Lınea de Investigacion:
Sistemas de distribucion
Universidad Nacional de Colombia
Facultad de Ingenerıa, Departamento Ingenerıa Electrica y Electronica
Bogota, Colombia
2014


A mis dos princesas, a mis papas y al Ingeniero Henry Navarro por su incondi-
cional ayuda.


vii
Resumen
Los costos de inversion y operacion de los sistemas de distribucion son alrededor de 2/3
de los costos totales del sistema de potencia, por tal motivo el disenador busca la respuesta
de menor costo que cumpla las restricciones tecnicas exigidas, pero corriendo el riesgo que
la solucion encontrada no sera el optimo global. Afortunadamente existen gran cantidad de
tecnicas de optimizacion que ayudan a encontrar buenas soluciones. En este trabajo se habla
acerca del diseno optimo de sistemas de distribucion de energıa.
Palabras clave: Redes de distribucion, diseno optimo, algoritmos geneticos, Progra-
macion dinamica.
Abstract
The investment and operation cost of the distribution system is nearly 2/3 of the power
system total cost, thats why the designer finds the optimal result that minimize the costs,
according to the technical constraints. In general, it is not feasible to guarantee the solu-
tion found is the global optima. Nowadays, there are exist a great variety of optimization
techniques which can provide satisfactory solutions. This thesis presents some topics about
optimal design of distribution systems.
Keywords: Power distribution systems, optimal design, genetic algorithms, Dynamic
programming.

Contenido
Resumen VII
1. Introduccion 2
1.1. Red (T & D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Costos de la red de distribucion . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Identificacion del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4. Solucion Propuesta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5. Objetivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.1. Alcances y limitaciones: . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.2. Alcances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.3. Limitaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.4. Metodologıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.5. Actividades a desarrollar . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. Planteamiento del problema a resolver 7
2.1. Estado del Arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1. Historia del diseno optimo de redes de distribucion . . . . . . . . . . 7
2.1.2. Trabajos previos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2.1. Diseno optimo de redes de distribucion II . . . . . . . . . . 10
2.1.2.2. Diseno optimo de redes de distribucion II . . . . . . . . . . 12
2.1.2.3. Diseno optimo de redes de distribucion parte III . . . . . . . 15
2.2. Modelo de optimizacion integral . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3. Costos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1. Temporalidad de los costos: . . . . . . . . . . . . . . . . . . . . . . . 19
2.3.2. Temporalidad del dinero . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4. Como se puede resolver el problema de optimizacion. . . . . . . . . . . . . . 20
2.4.1. Modelo Matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.1.1. Programacion Dinamica . . . . . . . . . . . . . . . . . . . . 23
2.4.1.2. Algoritmos Geneticos . . . . . . . . . . . . . . . . . . . . . . 26
2.4.1.3. Colonia de Hormigas . . . . . . . . . . . . . . . . . . . . . . 28
2.4.1.4. Modelo Discreto . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.1.5. Costos no Lineales . . . . . . . . . . . . . . . . . . . . . . . 32

Contenido ix
2.4.2. Enfoque del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.2.1. Elementos que se optimizan . . . . . . . . . . . . . . . . . . 32
2.4.2.2. Estado del circuito que se quiere optimizar . . . . . . . . . . 33
2.4.2.3. Espacio Temporal . . . . . . . . . . . . . . . . . . . . . . . 34
2.4.2.4. Optimizacion Monoobjetivo o Multiobjetivo . . . . . . . . . 34
2.4.2.5. Incertidumbre en la planeacion . . . . . . . . . . . . . . . . 34
3. Solucion Propuesta 36
3.1. Circuito secundario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.2. Circuito primario: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3. Funcion Objetivo (Costos): . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.4. Funcion Objetivo (Distancia): . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5. Funcion Objetivo (Momento): . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.5.1. Metodo de los Momentos . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.6. Calculo de Costos: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.7. Ajustes y descripcion del modelo utilizado: . . . . . . . . . . . . . . . . . . . 52
3.7.1. Python Scripting: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.7.1.1. Valores por defecto: . . . . . . . . . . . . . . . . . . . . . . 55
3.7.1.2. Scripting Avanzado . . . . . . . . . . . . . . . . . . . . . . . 56
3.7.2. Diagrama de Flujo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4. Evaluacion de los algoritmos seleccionados 65
4.1. Circuito Primario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1.1. Casos de estudio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1.2. Criterio de seleccion de metodologıas . . . . . . . . . . . . . . . . . . 68
4.1.2.1. Calidad: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.1.2.2. Dispersion de datos . . . . . . . . . . . . . . . . . . . . . . . 68
4.1.3. Resultados Encontrados . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.1.3.1. Caso 63 nodos: . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.1.3.2. Caso 118 Nodos . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.1.4. Analisis de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.1.4.1. Calidad: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.1.4.2. Dispersion de datos . . . . . . . . . . . . . . . . . . . . . . . 79
4.1.5. Seleccion del algoritmo: . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2. Circuito Secundario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3. Aspectos Complementarios: . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5. Conclusiones y Trabajos Futuros: 87
5.1. Resumen del estado de los trabajos base de Diordi. . . . . . . . . . . . . . . 87
5.2. Valor agregado por la tesis: . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.3. Debilidades o puntos a mejorar. . . . . . . . . . . . . . . . . . . . . . . . . . 90

Contenido 1
5.4. Evaluacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.5. Posibles Trabajos Futuros : . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
A. Variables 95
B. Manual de usuario: 97
B.1. Requerimientos: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
B.2. Instalacion: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
B.2.1. Instalacion Windows r: . . . . . . . . . . . . . . . . . . . . . . . . . 98
B.2.2. GNU/Linux (Debian) . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
B.3. Estructura: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
B.3.1. Ejecutables: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
B.3.2. Inputs: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
B.3.3. Conexiones: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
B.3.4. Log: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
B.3.5. PydiordiLib: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
B.3.6. Requerimientos: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
B.3.7. SalidaPrimario y SalidaSecundario: . . . . . . . . . . . . . . . . . . . 106
B.3.8. entrada.py: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
B.4. Ejecucion desde Windows r: . . . . . . . . . . . . . . . . . . . . . . . . . . 107

1. Introduccion
1.1. Red (T & D)
La energıa se suministra al usuario utilizando la infraestructura de transmision y distribucion
(T & D). Un sistema T & D se componen de cientos de lıneas, transformadores y otros equipos
auxiliares que aseguran la maxima cobertura posible de usuarios, con capacidad de suplir
las cargas picos, con continuidad y calidad en el servicio.
Figura 1-1.: Cadena de prestacion de servicio de energıa electrica
El sistema de T & D se puede resumir de la siguiente forma, figura 1-1.
Transmision (STN): El sistema de transmision es una red trifasica con niveles de
tension que normalmente son mayores o iguales a los 220 kV, con lıneas con capacidad
de transportar alrededor de 50 MVA a 2000 MVA, conectan las subestaciones elevadoras
a las subestaciones receptoras primarias.
Nivel 4 (STR): Toma la potencia de la subestacion receptora primaria y la trans-
porta hacia las diferentes subestaciones receptoras secundarias, con niveles de tension

1.2 Costos de la red de distribucion 3
mayores o iguales a 57.5 kv a hasta 115 kV, las lıneas transporta potencia en un rango
de 30 a 250 MVA
Nivel 2 y 3 (SDL): Red conformada tıpicamente por lıneas areas pero tambien a
traves de ductos, transportan energıa de las subestaciones receptoras secundarias a
los transformadores de distribucion, con niveles de tension de 34.5, 13,8 o 11.4 kV,
transporta potencia en un rango de 30 kVA a 20 MVA.
Nivel 1 (SDL): Con niveles de tension 120-208 V conecta los transformadores de
distribucion con los clientes finales
1.2. Costos de la red de distribucion
Teniendo en cuenta el esquema de T & D, el costo de transportar energıa a un usuario remu-
nera los costos de inversion de la Generacion, Transmision, Distribucion y adicionalmente
los costos de operacion como Perdidas Comercializacion y Otros.
Los costos de inversion de la red distribucion [Ramirez, 2004] son aproximadamente 2/3 del
sistema de (T & D), ya que a pesar de que el precio de los equipos de distribucion comparados
con los de Transmision son menores, la cantidad de elementos que lo componen es mucho
mayor. En Colombia [CREG, 2010] aproximadamente la distribucion es la mostrada en las
tablas 1-1 y 1-2.
Transmision [km]
Lıneas a 500 kV 2,399
Lıneas a 220 - 230 kV 11,647
Lıneas a 138 kV 16
Longitud Total 14,062
Tabla 1-1.: Longitud aproximada de la red de transmision Colombiana en el 2010
Transmision [km]
Lıneas a 115 kV 9,600
Lıneas a 34.5 kV 16,300
Lıneas a 11.4/13.2 kV 176,900
Lıneas < 1000 V 250,000
Total 452,800
Tabla 1-2.: Longitud aproximada de la red de distribucion Colombiana en el 2010

4 1 Introduccion
Buscando minimizar costos de inversion y operacion, el disenador busca plantear una solucion
lo menos costosa posible cumpliendo requisitos tecnicos exigidos por la regulacion vigente,
pero que tan cerca o no de la respuesta optima, esta estrechamente relacionado con su
experiencia y conocimiento, corriendo el riesgo de llegar a un diseno que no necesariamente
sea el mejor.
En la actualidad existen diferentes tecnicas de optimizacion y muchas de ellas se pueden
usar para encontrar el diseno mas apropiado de un sistema de distribucion, pero debido a
que pueden llegar a ser complejas matematicamente por la cantidad de variables, ecuaciones
asociadas y a que son problemas no lineales basicamente, hacen que no sea muy atractivo
usar este tipo de tecnicas a menos de que se haga a traves de una manera automatizada.
1.3. Identificacion del problema
Existe un modelo de optimizacion que fue elaborado en tres tesis de pregrado ([Perez et al., 1990],
[Mayorga H, 1991] y [Alcazar, 1995]) que busca encontrar el arbol de mınima expansion pa-
ra el diseno del circuito primario y a traves de la programacion dinamica la seleccion del
transformador de distribucion y diseno el circuito secundario.
Buscando mejorar la anterior metodologıa, se revisa el estado de arte a la fecha y se buscara
las debilidades del modelo para mejorarlas, prestando especial atencion al diseno del circuito
primario. Se hara un modelo amigable y practico en su estructura, manejo de datos y sus
salidas.
1.4. Solucion Propuesta:
Con la metodologıa propuesta se busca obtener un diseno optimo global considerando los
componentes principales de la red de distribucion (circuito primario, transformador de dis-
tribucion y circuito secundario).
En el presente trabajo se estudiaron algunas de las diferentes metodologıas o enfoques en el
diseno optimo de redes de distribucion, buscando comparar y mejorar la propuesta hecha en
[Perez et al., 1990], [Mayorga H, 1991] y [Alcazar, 1995], a traves de algunos ejemplos, para
ası poder encontrar ventajas y desventajas de cada una y de esta manera escoger la mas
apropiada para ser implementada en un software.
De forma general los criterios de comparacion son:
Complejidad del metodo: Se debe evaluar la complejidad de la implementacion del
metodo en la herramienta final.
Eficiencia computacional: La velocidad con que el algoritmo es capaz de encontrar
la respuesta.

1.5 Objetivo: 5
La calidad de la respuesta encontrada: La respuesta encontrada cumpla los re-
quisitos tecnicos requeridos y que no sea un mınimo local.
Flexibilidad: Permita realizar variaciones segun las necesidades.
1.5. Objetivo:
Analizar y comparar diferentes tecnicas existentes para el diseno optimo de los circuitos
primarios, circuitos secundarios, seleccion de los transformadores de la red de distribucion
de energıa, aplicando los anteriores criterios para seleccionar e implementar la metodologıa
mas adecuada.
1.5.1. Alcances y limitaciones:
1.5.2. Alcances
EL software debera ser capaz de soportar el diseno de los circuitos primarios, el trans-
formador de distribucion y los circuitos secundarios de un sistema de distribucion de
una manera amigable y eficiente.
El software contara con una base de datos con precios del mercado, que seran actuali-
zados constantemente, para que de esta manera el modelo se aproxime lo mas posible
a la realidad.
1.5.3. Limitaciones
El numero de nodos maximo esta limitado por el hardware al que se tenga acceso.
No es una herramienta para hacer planos como Autocad o de dibujo vectorial como
Flash, sino un programa de optimizacion, por lo tanto como primera alternativa se
buscara poder importar imagenes que contengan los planos para poder hacer el diseno
respectivo, si esto no se logra de manera satisfactoria, entonces el programa debera ser
capaz de generar sus propios diagramas.
1.5.4. Metodologıa
Para la realizacion de la propuesta se ha consultado diferente documentacion relacio-
nada con el diseno, por lo tanto la primera parte del documento final estara enfocado
en conocer el estado del arte del tema
Una vez teniendo un espectro adecuado de alternativas, realizar un estudio de cada
una de ellas para escoger la mas apropiada e implementarla en el software.

6 1 Introduccion
Implementar el software con la metodologıa escogida.
1.5.5. Actividades a desarrollar
Complementar la bibliografıa encontrada hasta el momento, para realizar un adecuado
estado del arte.
Estudiar cada uno de las propuestas presentadas en la bibliografıa, hacer un analisis
comparativo de cada una de ellas, hacer ejemplos de caso y escoger la tecnica mas
apropiada acorde a unos criterios predefinidos.
Establecer los requisitos del software.
Desarrollo del software.
Elaboracion del documento final.
1.6. Resumen
1. Capıtulo 1: Inicia con una introduccion a las red T & D y posteriormente se habla de
la red de distribucion, para empezar a describir la importancia de reducir sus costos
Se definen los objetivos y metodologıas para ser usadas en este trabajo.
2. Capıtulo 2: Se describen las caracterısticas de los costos asociados a la red de dis-
tribucion y del problema de optimizar sus costos. Se plantea y explica la funcion de
costos que se debe minimizar y la forma de abordar el problema de optimizacion. Adi-
cionalmente se encuentra el estado del arte del tema y se profundiza en los trabajos en
los que se baso este proyecto.
3. Capıtulo 3: Se describe el enfoque y caracterısticas que se le dio al problema a so-
lucionar, planteando las diferentes alternativas usadas para optimizar el costo de la
red (distancia, costos y momento). Se explican las ecuaciones usadas y la estructura
general de Pydiordi y sus variaciones con respecto a Diordi.
4. Capıtulo 4: Se muestran y comparan los resultados de los casos estudiados con las
metodologıas planteadas (Diordi, ANT Colony y AG), que justifican la seleccion de la
metodologıa implementada en Pydiordi.
5. Capıtulo 5: Es el capıtulo donde estan consignadas las conclusiones del trabajo rea-
lizado y se plantean algunas de las tareas futuras.

2. Planteamiento del problema a resolver
2.1. Estado del Arte
Se inicia con la revision del estado del arte de las redes de distribucion (Circuito Primario,
Circuito secundario y Transformadores).
2.1.1. Historia del diseno optimo de redes de distribucion
El inicio de la optimizacion de sistemas de distribucion se puede remontar aproximadamente
a los anos 60 con un primer artıculo [Knight, 1960] donde usando programacion lineal entera
se minimizaba los costos de instalacion de las lıneas, este modelo estaba sujeto a restricciones
lineales y no tenıa en cuenta el aspecto temporal del problema. Con este mismo tipo de
programacion [Masud, 1974] aborda el problema de optimizar el tamano de las subestaciones
y transferencias de carga pero sin tener en cuenta costos variables ni las lıneas. En 1964
[Dakin, 1964] ya ha trabajado con metodologıas para resolver problemas de programacion
entera-mixta lineal, pero hasta 1974 se conoce trabajos como [Adams, 1974] donde se usa
el algoritmo de Branch and Bound para optimizar las caracterısticas de las lıneas partiendo
de la ubicacion y capacidad de las subestaciones, sujetos a las leyes de kirchhoff y con una
potencia maxima transportada, dado que la funcion de costos deberıa ser lineal se realizo una
aproximacion a partir de segmentos lineales
En 1975 [Crawford and Holt, 1975] usando el algoritmo de Dijkstra o tambien llamado al-
goritmo de caminos mınimos, busca resolver el problema de ubicacion, tamano y areas de
servicio de las subestaciones, minimizando el producto de la demanda por la distancia a las
subestaciones.
Hasta la fecha la optimizacion de subestaciones y las lıneas se trataban por separado pero en
1977 [Hindi, 1977], enriquece el modelo optimizando las rutas de las lıneas y la ubicacion de
las subestaciones considerando sus costos fijos y variables basandose en el algoritmo propues-
to por [Adams, 1974], la radialidad no se garantiza de manera explıcita en la optimizacion
sino que se asegura a traves de un metodo heurıstico.
Buscando encontrar tiempos de ejecucion satisfactorios en redes de tamano real [Wall et al., 1979],
en 1979 implementa un algoritmo donde se parte de una topologıa (ubicacion y tamano de
las subestaciones) y un flujo de potencia, como resultado se obtiene los conductores del
alimentador, segun [Mayorga H, 1991] no es valido para ser usado en redes secundarias.
En 1981 [Gonen, 1981] busca la manera de trabajar con un modelo que se acerque mas a la

8 2 Planteamiento del problema a resolver
realidad, esto lo logra realizando una aproximacion lineal de los costos variables de las lıneas
de diferentes tamanos para que sean usados dentro de la funcion objetivo y ası abordar el
problema como un problema de programacion lineal, el inconveniente de esta tecnica es que
maneja gran cantidad de variables por lo tanto es aplicable a sistemas pequenos
A principio de los anos 80s [Sun et al., 1982]; desarrolla un modelo multietapa que usa pro-
gramacion lineal entera, este modelo se divide en dos pasos, en el primero se aborda el
problema como un modelo monoetapa usando el ano final y en el segundo paso teniendo
en cuenta el crecimiento de la carga en cada una de las anos intermedios, se determina los
sistemas optimos intermedios.
El uso de costos no lineales lleva a respuestas mas exactas [Willis et al., 1996] pero los algorit-
mos de optimizacion de redes de distribucion hasta ahora nombrados trabajaban con progra-
macion lineal, a pesar de que en 1939 [Karush, 1939] y posteriormente en 1951 [Karush, 1939]
plantearon las condiciones necesarias y suficientes para que la respuesta de un problema de
solucion no lineal sea optima, en [Youssef et al., 1985] introduce los costos no lineales usando
programacion entera-mixta no lineal con un algoritmo Lagrangiano.
Teniendo en cuenta que el problema de optimizacion de sistemas de distribucion desde el
punto de vista practico se compone de una serie de inversiones en diferentes anos, un modelo
monoetapa puede no ser el mas apropiado para modelar el problema, por esta razon el modelo
multietapa es de gran importancia, como el de [Gonen, 1986] donde se usa programacion
entera-mixta lineal, costos linealizados, con un modelo multietapa completamente dinamico
que incluye el tiempo en que se deben hacer las inversiones.
En 1956 [Frank, 1956] desarrolla la programacion cuadratica, la cual es usada en 1987 por
[Ponnavaikko et al., 1987], modelando el problema con una funcion objetivo cuadratica su-
jeta a unas restricciones lineales, pero trabajando solo con variables continuas ası que es
necesario para solucionar este problema dividirlo en dos etapas, en la primera se tratan
todas las variables como continuas y en la segunda las variables que deben ser enteras se
convierten a enteras.
El trabajo hecho por [Tram, 1988] es la base del algoritmo de seleccion del conductor usado
en [Mayorga H, 1991], base de esta tesis. Con programacion dinamica se selecciona el tipo
del conductor de un circuito primario y secundario, partiendo de una topologıa y flujo de
potencia dado. Se tiene en cuenta los costos de inversion y operacion, caıdas de tension y
capacidad de transporte del conductor.
Tambien en este ano [Youssef, 1988], continua su modelo [Youssef et al., 1985], tratandolo
como un problema multietapa y encontrando una respuesta con menores costos.
Una metodologıa diferente a las nombradas anteriormente es el uso de sistemas expertos
como [Hsu, 1990], en esta metodologıa se busca determinar la ubicacion de las subestaciones
y las lıneas a partir de una serie de reglas heurısticas y la interaccion con el usuario, por tal
razon no se puede asegurar que se llegue a la respuesta optima, en este caso se trabaja con
costos no lineales.
Adicionalmente se encuentra otra metodologıa no tradicional hecha en [Aoki et al., 1990],

2.1 Estado del Arte 9
donde se aporta el algoritmo de Branch exchange, esta metodologıa tiene el problema de
caer en mınimos locales [Domınguez, 2000], posteriormente amplıan tal metodologıa pa-
ra ser usada en planeacion multietapa pero sin solucionar los problemas de su antece-
sor [Nara et al., 1991], para finalmente en [Nara et al., 1992] usando multi-state branch-
exchange lograr mejorar tal problema, aplicando una tecnica heurıstica que consiste en que
en tiempo de ejecucion cuando no mejore la respuesta se admiten cambios que la empeoren
provisionalmente esperando cambios futuros que la mejoren.
Una de las tecnicas mas populares en el diseno optimo de sistemas de distribucion en este
momento son los algoritmos geneticos, en [Miranda et al., 1994] publica un primer docu-
mento donde se usan costos no lineales, la confiabilidad del sistema es tenida en cuenta
al darle un costo en la funcion objetivo, se plantea como un problema multietapa pero no
tiene coordinacion entre las diferentes etapas y se puede presentar que las soluciones se
superpongan[Domınguez, 2000].
La incertidumbre en la planeacion de un sistema de distribucion es tratada en [Carvalho et al., 1997],
a traves de una optimizacion donde se tienen diferentes posibles escenarios. Usando algorit-
mos evolutivos se encuentra una serie de buenas soluciones para cada uno de los posibles
escenarios de los cuales se escogen las respuestas que mejor se comporten en todos los esce-
narios.
Bernal en [Bernal, 1998] 1998 en su tesis de doctorado, realiza un estudio de los diferentes
modelos que se han usado en la optimizacion de sistemas de distribucion hasta la fecha de su
publicacion, adicionalmente trabaja con varios modelos para la planeacion (monoobjetivo,
multiobjetivo, mono-etapa y multi-etapa) pero dando enfasis en un esquema de optimizacion
con programacion entera-mixta no lineal con algoritmos geneticos, usando costos no lineales,
multietapa y multiobjetivo donde se tiene en cuenta la confiabilidad del sistema,
Un nuevo trabajo que tiene en cuenta la incertidumbre en la planeacion fue hecho por
[Ramirez-Rosado et al., 1999], usando el metodo de tabu-search hıbrido, con el fin de buscar
modelos probabilısticos mas robustos que los que se tendrıan con uno determinıstico y con
tiempos bastante aceptables de CPU en sistemas grandes. Continuando con el trabajo he-
cho por [Bernal, 1998] , [Ramirez-Rosado, 2001], se trabaja con un modelo de optimizacion
multiobjetivo donde se tienen dos funciones objetivos y como resultado de la optimizacion
no solo se obtiene una solucion como en la monobjetivo sino una serie de posibles soluciones
en equilibrio paretiano, se trabaja con un modelo de optimizacion no lineal entera-mixta.
En [Ramirez-Rosado, 2004], se planea los sistemas de distribucion teniendo en cuenta de
manera simultanea los costos, la confiabilidad, la capacidad y ubicacion de alimentadores de
reserva. En esta publicacion los factores que presentan incertidumbre son las variaciones de
demanda electrica, los costos variables de energıa y adicionalmente las potencias, tensiones y
corrientes difusas ocasionadas por las primeras. El articulo presenta un modelo fuzzy original
basado en optimizacion no lineal multiobjetivo para planear el sistema mono-etapa o multi-
etapa.

10 2 Planteamiento del problema a resolver
2.1.2. Trabajos previos
Previamente a este trabajo se realizo un proyecto que consistio en 3 trabajos de grado donde
se busco el diseno optimo global de los sistemas de distribucion de energıa electrica.
2.1.2.1. Bases para la formulacion de un algoritmo de optimizacion para diseno de
redes de distribucion
[Perez et al., 1990]
Metodologıa Propuesta
Un algoritmo que encuentra los conductores primarios y secundarios que minimizan los costos
de operacion e inversion de un sistema de distribucion radial usando programacion dinamica.
Se asume conocida la ubicacion de los transformadores y el flujo de potencia en cada tramo.
Funcion Objetivo
La funcion se compone por los costos de inversion y de operacion de cada uno de los con-
ductores que componen la red.
fcos =
Ns∑
i=1
(Oper(i) + Inv(i))
Descripcion del algoritmo
Los pasos para encontrar el conductor optimo son:
1. Preproceso de numeracion de nodos:
La numeracion de los nodos se hace en orden ascendente desde el ultimo nodo de alguna
derivacion hasta llegar a la subestacion como se muestra en la figura 2-1.
2. Proceso de optimizacion
a) Iniciar por el nodo 1 y se repite este procedimiento con el resto de nodos de
manera ascendente hasta llegar a la subestacion.
b) Calcular los costos inversion y operacion, la caıda de tension V (i, k) del segmento
i con cada uno de los conductores k .
c) Escoger el conductor k con el cual se tiene la menor caıda de tension en el segmento
i.
Vdmin(i) = min (Vdmin(i, k)) (2-1)
Y la caıda de tension mınima acumulada:
VdAcum(i) = Vdmin(i, k) +MAX [VdAcum(i− 1)] (2-2)

2.1 Estado del Arte 11
4
3
7
2
1
6
5
9 8
S / E
Figura 2-1.: Proceso de numeracion
Si el segmento tiene ramificaciones como el caso de un transformador se escoge la
de mayor valor regulacion.
d) Usando la ecuacion de 2-3 se calculan los valores de las variables de estado.
V (i, j) = (p− 1)VdMax − VdAcum(i)
M+ VdAcum(i)
p = j + 1, j = 1, 2, ...M(2-3)
e) Para cada uno de los conductores se verifica si VdAcum(i− 1) + V (i, k) <= V (i, j)
y VdAcum(i− 1)+ V (i, k) <= VdMax , si estas condiciones se cumplen el conductor
se puede usar en este estado y su precio se diligencia en la fila correspondiente, si
no es ası se debe poner un valor penalizado en la tabla 2-1.
f ) En cada nivel pueden haber varios conductores, pero solo el valor de menor costo
sera la variable de control y su costo acumulado la variable de continuacion.
g) Se pasa al siguiente segmento acumulando los costos.
h) En el ultimo segmento Ns se calculan los costos y caıdas de tension, pero en este
caso el unico nivel que existira es el correspondiente a la caıda maxima permisible
VdMax,M = 1.
3. Proceso de seleccion de conductor optimo:
Se parte desde el ultimo tramo Ns.

12 2 Planteamiento del problema a resolver
Variable
de estado
V (i, j)
Conductor
1
Conductor
2
Conductor
3
Variable de
Continua-
cion
Variable de
Control
V (i, 1) $ Cond 1 $ Cond 2 $ Cond 3 $ del con-
ductor mas
bajo
Conductor
con $ mas
bajo
V (i, 2) $ Cond 1 $ Cond 2 $ Cond 3 $ del con-
ductor mas
bajo
Conductor
con $ mas
bajo
V (i, 3) .. .. .. .. ..
M $ Cond 1 $ Cond 2 $ Cond 3 $ del con-
ductor mas
bajo
Conductor
con $ mas
bajo
Tabla 2-1.: Tabla de variable de estados
El conductor que se escoge es el de menor costo de la tabla de variable de estados
de este tramo (Tabla 2-1).
Se pasa al siguiente tramo.
Con el conductor escogido en el tramo Ns se calcula la caıda de tension restante
para el resto del circuito Vd(Ns − 1) = VdMax − Vd(K(Ns)).
Este valor Vd(Ns − 1) se busca en la tabla de variable de estados [Ns − 1] y se
toma el conductor seleccionado como variable de control.
Se pasa al segmento Ns − 2 y se calcula la tension restante y demas pasos para la
seleccion del conductor en tal tramo.
El procedimiento se continua para el resto de tramos hasta llegar al segmento 1.
Segmento n : Vd(n− 1) = VdMax − Vd(K(Ns))
Segmento n-1 : Vd(n− 2) = Vn−1 − Vd(K(Ns − 1))
Segmento n-2 Vd(n− 3) = Vn−2 − Vd(K(Ns − 2))
Segmento n-3 Vd(n− 4) = Vn−3 − Vd(K(Ns − 3))
Para una lectura mas detallada del algoritmo se puede consultar [Perez et al., 1990],
[Alcazar, 1995] o el artıculo base del algoritmo [Tram, 1988].
2.1.2.2. Diseno optimo de redes de distribucion II
[Mayorga H, 1991]
Revision Bibliografica
El documento realiza una revision bibliografica de diferentes documentos entre los que se
encuentran [Wall et al., 1979], [Tram, 1988] y [Perez et al., 1990].

2.1 Estado del Arte 13
De [Perez et al., 1990] se hace una descripcion general del trabajo y una retroalimentacion
fruto de la experiencia de ser usado en la clase de lıneas y redes de la Universidad Nacional
de Colombia durante el segundo semestre de 1990 y el primero de 1991.
El principal punto que encontraron fue el incumplimiento de la regulacion en el secundario en
algunos casos debido a que se uso de manera simultanea la regulacion del circuito primario,
transformador y secundario durante el calculo de las tablas de optimizacion y en la asignacion
del conductor, para resolver este problema se debe considerar el primario y el secundario por
separado, esta modificacion se llamo Condor.
Algoritmo implementado para el circuito secundario
1. Requisitos previos:
La ubicacion de los postes (nodos) de la red de distribucion y la cantidad de
usuarios en cada uno.
Se debe tener una enumeracion de los nodos e identificar si es un nodo de giro o
no.
Las posibles conexiones a ese nodo (Nodos Aledanos)
2. Se identifica el nodo(s) 1 con el menor numero de posibles conexiones con el fin de
asegurar su alimentacion.
3. Escogiendo el conductor de maximo calibre, se va verificando cada uno de los nodos
desde los cuales se cumple los lımites de regulacion al nodo escogido en el paso anterior
(Nodos Transformador).
4. Usando cada nodo transformador como origen de un circuito:
a) Se empiezan a generar topologıas lineales (Figura 2-2).
1 2 3 41
1 2 3 41
1 2 3 41
Figura 2-2.: Generacion Topologıas Lineales
1Pueden ser varios nodos, se escoge uno de ellos para el siguiente paso

14 2 Planteamiento del problema a resolver
1 2 3 41 1 2 3 41
5 5
1 2 3 41
5
Figura 2-3.: Combinacion de Topologıas Lineales
b) A partir de las topologıas lineales se realizan combinaciones para obtener nuevas
topologıas, y a partir de las nuevas se vuelve a realizar combinaciones para encon-
trar adicionales y ası en un proceso iterativo hasta encontrar todas las posibles
combinaciones (Figura 2-3).
c) Se eliminan las topologıas que no contengan al nodo de menor cantidad de cone-
xiones.
5. A las topologıas generadas se le aplica el algoritmo de seleccion de conductor y se
escoge el transformador apropiado.
6. Se calcula el precio por usuario y se escoge la topologıa de menor costo.
7. Se eliminan los nodos de la topologıa de la base de datos.
8. Se vuelve hasta el al paso 2 y se repite hasta haber agotado los nodos y ası se termina
el secundario.
Una vez terminado de escoger los tramos que componen al circuito secundario, se tiene la
ubicacion de los transformadores y sus cargas, que sera la entrada para el circuito primario.
Algoritmo implementado para el circuito primario
Para el circuito primario se hicieron las siguientes consideraciones:
La regulacion del primario no es un aspecto critico por lo tanto no se tiene en cuenta
en el momento de generar el arbol que conecta los transformadores.
En el primario los costos dependen fundamentalmente de los gastos de inversion.
La seleccion del conductor se realiza una vez definida la topologıa.

2.1 Estado del Arte 15
Una red de distribucion se puede modelar como una serie de puntos (postes) relacio-
nados entre si por una distancia y unidos con un tipo de conductor, basicamente un
grafo, por este motivo se usa la teorıa de arboles mınimos para encontrar el camino
optimo que garantice que ningun nodo sin alimentar.
1. Los nodos donde se ubicaron los transformadores mas los nodos de giro conforman la
nueva base de datos.
2. El algoritmo identifica las posibles conexiones entre estos nuevos puntos.
3. Se usa el algoritmo de Kruskal para encontrar el arbol mınimo:
Se toma un nodo arbitrario y se conecta su nodo mas cercano formando un sub
arbol.
Se continua con otro nodo arbitrario y se conecta tambien con su nodo mas
cercano para formar otro sub arbol.
Repiten el proceso con cada uno de los nodos restantes.
Empiezan a conectar los sub arboles con los sub arboles mas cercano hasta que
no halla ninguno sin pareja.
Continuan con el proceso hasta que se forme un solo arbol
4. Usan el algoritmo Condor para la seleccion del conductor del circuito primario
2.1.2.3. Diseno optimo de redes de distribucion parte III
[Alcazar, 1995]
Estado de las etapas anteriores y problemas a resolver
Se realizaron una serie de pruebas durante dos semestres para evaluar la segunda parte del
trabajo donde se obtuvieron resultados satisfactorios en el diseno de la topologıa del circuito
secundario y con el algoritmo de seleccion del conductor optimo. En el primario la ruta
obtenida no siempre era la optima (resultados ilogicos e interrupciones del programa sin
haber concluido el diseno).
Desempeno de los algoritmos
1. Diseno de circuito primario
Se argumenta que el metodo del arbol mınimo puede no ser el mas apropiado en una
red de energıa electrica, ya que es aplicables a redes fuertemente conexas que son redes
que tienen la caracterıstica de que los nodos se puede conectar con cualquier otro de
manera directa sin necesidad de pasar por otro.
Se observo que el algoritmo en algunos casos no escogıa la ruta que a simple vista serıa
la mas optima, por ejemplo en la Figura 2-4 el camino mas corto seria T2-1-T1 y no
T2-4-3-2-T1 que serıa el camino escogido.

16 2 Planteamiento del problema a resolver
4
40
3
39
2
T2 T140 40
39 39
Figura 2-4.: Ruta indeseable
Esto se debe a que cuando se arma el arbol se tiene en cuenta la distancia mas corta
con respecto a los nodos aledanos y no la distancia mas corta con respecto a los puntos
que se desean unir, por este motivo replantearon la metodologıa de solucion:
a) Desarrollaron un algoritmo que fuera capaz de explorar los nodos de la red pri-
maria y encontrar las distancias menores entre ellos
b) Se crea una lista con estas distancias
c) Usando como base esa lista se crea el arbol mınimo.
2. El metodo usado encuentra el arbol de menor longitud que une todos los nodos nece-
sarios, pero se puede presentar casos como el mostrado en la figura 2-5, aquı ambas
trayectorias tiene la misma longitud ası que en principio ambas son optimas, pero esto
no es cierto ya que en el caso de la derecha la carga D esta en la cola del circuito, lo
que obliga que los conductores de las trayectorias C-B-A se tengan que sobredimensio-
nar, la causa de esto es que el algoritmo no tiene en cuenta los flujos de potencia que
transporta cada tramo sino solamente la longitud.
Pero concluyen que la decision de tomar una alternativa con respecto a otra solo puede
hacerse despues de evaluar todos los costos asociados a cada una de ellas que serıa un
estudio demasiado extenso ya que requiere una cantidad tan grande recursos compu-
tacionales (memoria y tiempo) que desde el punto de vista practico es inconveniente
por lo que deciden que el arbol mınimo es una buena alternativa con la que se puede
encontrar un modelo muy aproximado sobre el cual el disenador podra implementar
ajustes donde lo considere.
3. Diseno del circuito secundario
Se concluye que los resultados eran satisfactorios y no requerıan modificacion.

2.2 Modelo de optimizacion integral 17
A otros nodos
B A
C D
A otros nodos
B A
C D
Figura 2-5.: Arboles de misma longitud y rutas diferentes
2.2. Modelo de optimizacion integral, circuito primario,
secundario y transformador
El diseno de redes de distribucion de energıa electrica busca minimizar los costos asociados
la red cumpliendo las restricciones tecnicas, la funcion del diseno optimo de redes de distri-
bucion es reducir los costos asociados a la prestacion del servicio de energıa cumpliendo con
las restricciones tecnicas necesarias.
min(Zp) = CostoOperacion+ CostoInversion+ otros
Zp =
Ns∑
i=1
[COl(i, ki) + CIl(i, ki) + Otros]
Sujeto a:
I(i, ki) ≤ Ink: La corriente que va por el tramo i con el conductor k no se supere la
corriente nominal del conductor k.
V DAcum(i) ≤ V DMax La caıda de tension acumulada desde las colas del circuito
hasta el tramo i (incluyendo) debe ser menor al limite maximo permitido.
Ns ≤ NNodos Restriccion de radialidad de un sistema de distribucion.
Los costos de la red primaria o secundaria se representan a traves de una funcion no lineal
y con variables discretas.

18 2 Planteamiento del problema a resolver
2.3. Costos
Los costos de un sistema de distribucion se dividen en costos de inversion, operacion y otros.
1. Costos de Inversion (CAPEX) : Los costos asociados a la adquisicion de las Uni-
dades Constructivas (UC).
Costos de la red de media tension: Consta de los costos asociados a diseno,
construccion y puesta en servicio de todas lıneas del sistema primario que operan
a 34, 13,8, 11.4 o 4.16 kV trifasicos, bifasicos o monofasicos, se incluyen costos de
reguladores, capacitores, seccionadores, fusibles., postes, costos de mano de obra.
Costos de la red baja tension: Incluye los costos de transformadores de dis-
tribucion, los conductores y demas equipos asociados.
Unidades Constructivas:
Segun lo niveles de tension propuestos por la CREG, la red de media tension corres-
ponde a los niveles 2 y 3 y para la red de baja tension el nivel 1, a continuacion se
presenta de manera general las UC que aplican segun el nivel, sin incluir subestaciones
o control.
Niveles 2 y 3
• km de lıneas aereas.
• Canalizaciones
• Juegos de cuchillas
• Reguladores
• Seccionalizadores
• Indicadores de falla
• PTs
• Sistema de teleproteccion.
• Banco de condensadores
Nivel 1
• km de lıneas aereas.
• Conductores cobren o aluminio
• Conductores aislados, desnudos o trenzados.
• Estructuras de apoyo.
• Cajas
• Canalizaciones.

2.3 Costos 19
• Transformadores monofasicos y trifasicos.
• Costo de instalacion x m.
• Puestas a tierra.
Ver anexo de costo tipos de unidades constructivas.
2. Costos de Operacion (Costo de las Perdidas): El transmitir la potencia desde
la fuente hasta el usuario final trae como consecuencia, perdidas de energıa que son
inherentes a las propiedades fısicas de los materiales que componen el sistema, estas
perdidas se presentan en conductores, transformadores o reguladores.
Perdidas Fijas: Este tipo de perdidas son constantes ya que no dependen de si
el sistema esta cargado o no, estas perdidas se presentan por la magnetizacion de
los nucleos de los transformadores o reguladores.
Perdidas Variables: Son causadas por la impedancia propia de las lıneas o
transformadores, estas perdidas dependen de la carga y se incrementan con el
cuadrado de la corrienteI2R .
3. Otros:
Costos de confiabilidad: Son las incentivos o personalizaciones a las que puede
incurrir el OR por no cumplir los estandares necesarios en la calidad del servicio.
Costos de mantenimiento: Durante la vida util de cada uno de los equipos
que componen la red se debe asegurar su optimo funcionamiento por tal motivo
es necesario realizar el mantenimiento correspondiente.
AO : Gastos de administracion y operacion
2.3.1. Temporalidad de los costos:
Costos Iniciales CAPEX: Normalmente estan asociados a los costos de inversion
del inicio del proyecto como los transformadores de distribucion, alimentadores, de la
puesta en servicio, la ingenierıa, costos de inspeccion, legales etc... Figura 2-6.
OPEX fijos: No dependen de la variacion de la carga, por ejemplo los costos de las
perdidas en vacio del transformador, costos de mantenimiento, inspecciones , pruebas,
certificacion, etc...
OPEX variables: Se ven directamente afectados por la variacion de la carga, como
las perdidas en carga.

20 2 Planteamiento del problema a resolver
OPEX Fijos
CAPEX
OPEX Variables
Figura 2-6.: CAPEX y OPEX
2.3.2. Temporalidad del dinero
Dado que los costos de operacion e inversion se dan durante diferentes instantes de tiempo, es
necesario tener presente la temporalidad del dinero para un correcto analisis de los costos, por
ejemplo todos los costos se pueden llevar a un valor presente (Se aplica el Factor Totalizador
FT) y posteriormente calcular un valor anual equivalente (Se aplica el factor CC) Ver Figura
2-7, para ver las formulas usadas y su explicacion remitirse a la seccion 3.6.
2.4. Como se puede resolver el problema de optimizacion.
2.4.1. Modelo Matematico
Existen diferentes tecnicas de optimizacion que son adecuadas segun el tipo de funcion que
se va optimizar u otras caracterısticas del problema, a continuacion se describen algunas de
las tecnicas encontradas usadas en el Diseno optimo de redes de distribucion
Simplex: Metodo desarrollado por Dantzing en 1947 para resolver problemas de pro-
gramacion lineal, el y sus variantes han sido base de gran cantidad de herramientas

2.4 Como se puede resolver el problema de optimizacion. 21
OPEX
OPEX llevados a un valor presente
Valor anual equivalente del OPEX.
Figura 2-7.: Calculo del costo anual equivalente de un proyecto
comerciales [Momoh, 2001].
Branch and Bound: El metodo de ramificar y acotar es un metodo exacto que sirve
para resolver problemas de programacion lineal entera y entera mixta. Su metodo-
logıa consiste en dividir el problema en varios pequenos subproblemas que son versio-
nes relajadas del original que pueden ser resueltas como problemas de programacion
lineal.[Echeverri et al., 2005]
Programacion Dinamica: Es un enfoque de la optimizacion que transforma un pro-
blema complejo en una serie de problemas simples, es esencialmente una forma de
resolver un problema de manera recursiva. Mas que una tecnica de optimizacion es
una metodologıa de analizar un problema, donde se pueden utilizar diferentes metodos
de optimizacion para resolver los problemas sencillos para posteriormente buscar la
solucion del mas complejo. [Mora, 2001]
Algoritmos Geneticos: Los algoritmos evolutivos son una tecnica de resolucion de
problemas de optimizacion inspirada en la teorıa de la evolucion de las especies y la
seleccion natural. Estos algoritmos parten de las ideas del modelo de evolucion natural
que fue propuesto por Charles Darwin. [Araujo, 2009]
En diferentes disciplinas de la ingeniera en un espectro grande de problemas de op-

22 2 Planteamiento del problema a resolver
timizacion de gran tamano y complejidad encontrar la solucion usando tecnicas de
optimizacion clasicas puede ser difıcil o costosa, en este tipo de casos los algoritmos
evolutivos dentro de los que se encuentran los algoritmos geneticos se tornan muy
interesantes [Momoh, 2001],
Colonia de Hormigas: Busca imitar el comportamiento de las hormigas para encon-
trar buenas soluciones a un problema de optimizacion combinatorial, la idea principal
de esta metodologıa se basa en estudiar la manera en como estos animales buscan el
camino mas corto para ir y volver entre el hormiguero y la fuente de alimento, lo cual
lo logran a partir de una comunicacion indirecta basada en feromonas.
Busqueda Tabu: La busqueda tabu consiste en un algoritmo iterativo que explora
el espacio de soluciones tratando de evitar caer en optimos locales, a traves de ope-
raciones que pueden temporalmente empeorar la solucion. [Navarro, 2007], su nombre
de Tabu viene de la creacion de una lista donde se almacenan los movimientos mas
recientes para evitar regresar a ellos y entrar en ciclos repetitivos [Gallego et al., 2008]
La busqueda tabu ha sido utilizada ampliamente en la resolucion de problemas com-
plicados asociados a la optimizacion combinatorial, y la planificacion de los sistemas
de distribucion no ha sido la excepcion [Navarro, 2007]
El criterio de seleccion de la metodologıa depende de la sencillez en su implementacion, de las
restricciones o simplificaciones que tengan que ser usadas con el mismo. El metodo Simplex
es un metodo analıtico que sirve para resolver problemas de programacion lineal, por tal
motivo para poder usarlo es necesario eliminar las no linealidades del problema (I2 · R), lo
cual se podrıa hacer si se hacen algunas simplificaciones como las hechas en [Knight, 1960]
donde la funcion objetivo minimizaba solamente los costos de inversion del circuito primario
o como en [Gonen, 1981] donde se linealizaban los costos de operacion.
Si se quiere mejorar un poco el modelo es necesario tener en cuenta que en la programacion
lineal se usan variables continuas, pero en el problema es necesario representar la conexion
entre dos puntos i y j, con una variable discreta, esto se puede mejorar si se usa programacion
lineal entera mixta y para su solucion la metodologıa Branch and Bound, pero con las mismas
funciones lineales. Para resolver un modelo mas exacto es necesario tener en cuenta las no
linealidades y usar programacion no lineal entera mixta, pero por la cantidad de variables
que pueden llegar a tener un circuito de distribucion, este problema puede llegar a ser muy
complejo, por este motivo las tecnicas metaheurısticas como AG, ANT, y Busqueda Tabu,
Recocido Simulado son ampliamente usadas en diferentes areas de la ingenierıa donde los
problemas de optimizacion son de gran tamano y complejidad y las tecnicas de optimizacion
clasicas pueden llegar a ser complejas de usar.
La siguiente parte consiste en seleccionar cual de estas tecnicas metaheurısticas se debe
usar, lo cual es una tarea difıcil teniendo en cuenta los comentarios buenos y malos que se
pueden encontrar de una u otra, pero tomando una decision se considera que los dos primeros

2.4 Como se puede resolver el problema de optimizacion. 23
metodos en primera instancia son mas sencillos de entender e implementar y en conjunto
con la programacion dinamica que aparte de ser la usada en el circuito secundario, se usa en
el circuito primario para la seleccion del conductor.
2.4.1.1. Programacion Dinamica
[Momoh, 2001]
Desarrollada en 1950 por Richard Bellman, la programacion dinamica busca transformar un
problema complejo en una secuencia de simples problemas pero analogos al general (Figura
2-8), su caracterıstica principal es su naturaleza multietapa y que mas que una tecnica de
optimizacion busca proveer una forma de analizar diferentes tipos de problemas
Xn+1 Xn X2 X1
Un U2 U1
Figura 2-8.: Sucesion de problemas en programacion dinamica
Es importante saber que la tecnica de optimizacion usada para resolver el subproblema
es irrelevante y que la programacion dinamica puede ser usada en problemas continuos,
discretos, determinısticos y estocasticos.
La programacion dinamica usa el principio de suboptimizacion de Bellman para resolver el
problema.
Dado un estado, la polıtica optima para las siguientes etapas no depende de la polıtica tomada
en las etapas anteriores.
Un problema de programacion dinamica se puede resumir en encontrar los valores de Ui−1 y
Ui que optimicen a f ∗i .
f ∗i (Xi+1) = optUi[fi−1(Xi, Ui−1) + fi(Xi+1, Ui)]
De manera general el esquema de solucion usado es el siguiente: (Ver figura 2-9)
1. El primer subproblema tiene como entrada X2, de acuerdo al principio de optimalidad
U1 debe ser escogida para optimizar f1 sin importar los otros estados.
f ∗1 (X2) = optU1[0 + f1(X2, U1)]
2. El siguiente subproblema agrupa los dos ultimos estados:

24 2 Planteamiento del problema a resolver
X4 X3 X2 X1
U3 U2 U1
Problema Original
Principio de
optimalidad aplicado al
ultimo componente
Principio de
optimalidad aplicado a
los dos ultimos
componentes
El sistema completo es
optimo
Figura 2-9.: Esquema de Solucion
f ∗2 (X3) = optU2,U1[f1(X2U1) + f2(X3, U2)]
El principio de optimalidad requiere que se escoja U1 y U2 que optimice a f ∗2 para un
X3 dado.
3. De manera similar se procede con el tercer paso que es el sistema completo.
f ∗3 (X4) = optU3,U2,U1[f2(X3, U2) + f3(X4, U3)]
Ejemplo:
La red presentada en la figura 2-10 ilustra un modelo simplificado de una red de distribucion
donde el nodo 1 representa un transformador, los nodos 2 a 7 posibles rutas y el 8 la carga.
El ejercicio consiste en encontrar el camino optimo entre el transformador y la carga.
Al ser un modelo simplificado se supone que las perdidas son proporcionales a la longitud
del conductor, ası que el camino mas corto sera el que tenga menores perdidas.
Los nodos 1 y 8 corresponden a los estados j=0 y j=4 respectivamente
1. Region Estado 1:
Para llegar al estado 1 se tienen solo dos opciones a traves de los nodos 2 F1(2) = 3 y
del nodo 3 F1(3) = 5.

2.4 Como se puede resolver el problema de optimizacion. 25
1
2
3
4
5
6
7
8
3
5
‘
10
1211
4
15
910
16
9
8
Figura 2-10.: Ejemplo programacion dinamica
2. Region Estado 2:
Al estado 2 se puede llegar a traves del nodo 4 o del 5
Usando el Nodo 4 F2(4)
Partiendo
del nodo
Nodo Des-
tino
Distancia en-
tre ellos
Distancia
Mınima del
nodo de
partida
Distancia
mınima
del Nodo
destino
2 4 10 F1(2) = 3 13
3 4 11 F1(3) = 5 16
F2(4) = 13
Usando el Nodo 5 F2(5)
Partiendo
del nodo
Nodo Des-
tino
Distancia en-
tre ellos
Distancia
Mınima del
nodo de
partida
Distancia
mınima
del Nodo
destino
2 5 12 F1(2) = 3 15
3 5 4 F1(3) = 5 9
F2(5) = 9
3. Region Estado 3:
Al estado 3 se puede llegar a traves del nodo 6 o del 7.
Usando el Nodo 6 F3(6)
Partiendo
del nodo
Nodo Des-
tino
Distancia en-
tre ellos
Distancia
Mınima del
nodo de
partida
Distancia
mınima
del Nodo
destino
4 6 15 F2(4) = 13 28
5 6 10 F2(5) = 9 19

26 2 Planteamiento del problema a resolver
F3(6) = 19
Usando el Nodo 7 F3(7)
Partiendo
del nodo
Nodo Des-
tino
Distancia en-
tre ellos
Distancia
Mınima del
nodo de
partida
Distancia
mınima
del Nodo
destino
4 7 9 F2(4) = 13 22
5 7 16 F2(5) = 9 25
F3(7) = 22
4. Region Estado 4:
Este estado solo tiene el nodo 8 que es el nodo final.
Usando el Nodo 8 F4(8)
Partiendo
del nodo
Nodo Des-
tino
Distancia en-
tre ellos
Distancia
Mınima del
nodo de
partida
Distancia
mınima
del Nodo
destino
6 8 9 F3(6) = 19 28
7 8 8 F3(7) = 22 30
F4(8) = 28 es la distancia mınima entre el nodo de inicio 1 y el final 8 (Figura
2-11).
1
2
3
4
5
6
7
85
4
10
9
Figura 2-11.: Respuesta ejemplo programacion dinamica
2.4.1.2. Algoritmos Geneticos
[Bernal, 1998] [Gallego et al., 2008]
Pertenecen al grupo de tecnicas denominadas metaheurısticas y es un modelo computacional
inspirados en la evolucion natural, capaz de resolver problemas con pocos esfuerzos compu-
tacionales comparados con otros metodos, no necesitan mucho conocimiento especıfico del

2.4 Como se puede resolver el problema de optimizacion. 27
problema en el que se usan, pueden ser usados en problemas de optimizacion donde las
tecnicas exactas no son eficientes o no son aplicables y es sencillo de implementar, aunque
es importante tener en cuenta que ninguna tecnica metaheurıstica garantiza encontrar el
optimo global del problema
El funcionamiento general de estos algoritmos consiste crear una poblacion de individuos
llamados cromosomas o genotipos, que van evolucionando al ser sometidos a una serie de
operaciones, estas transformaciones buscan emular los procesos de seleccion y de repro-
duccion usados en la naturaleza, siendo los individuos mas fuertes los que sobreviven y se
reproducen durante la ejecucion del algoritmo.
Otra ventaja de esta tecnica es que se suelen clasificar como metodos de busqueda global ya
que no usan la informacion del gradiente, lo que trae como ventaja su uso en funciones no
diferenciables o con multiples optimos locales.
Algunas caracterısticas importantes de los algoritmos geneticos son:
Se usa una codificacion de las soluciones.
Trabajan con una poblacion de soluciones, ası que se pueden obtener un conjunto de
soluciones viables para el problema
Usan reglas probabilısticas de transicion y no determinısticas, los operadores se aplican
con una probabilidad determinada.
Algoritmo genetico canonico:
El procedimiento general consiste en crear una poblacion inicial, posteriormente se aplica
un muestreo para crear una poblacion intermedia a la que se le aplican los operadores para
obtener una nueva poblacion, el criterio de parada se da cuando la poblacion es demasiado
homogenea y no existe mejora despues de un numero de iteraciones especificadas o si se llega
al numero maximo de ciclos generacionales.
Operadores Basicos:
Los operadores basicos que se aplican para la obtencion de la siguiente poblacion son:
Reproduccion:
Su funcionamiento consiste en realizar copias de soluciones una cantidad de veces de
acuerdo a su aptitud, ası el de mayor aptitud se copia la mayor cantidad de veces.
Cruce:
Una vez hecho el muestreo y la reproduccion se puede realizar un cruce entre soluciones
para encontrar unas nuevas, por ejemplo:
Y al cruzar las dos primeras posiciones el resultado sera:

28 2 Planteamiento del problema a resolver
0 0 0 1 1
1 0 1 1 1
1 0 0 1 1
0 0 1 1 1
Operacion Mutacion:
La mutacion consiste cambiar un caracter de forma aleatoria lo que le da la capacidad
al problema de tener soluciones capaces de evolucionar y mejorar sin lo cual se podrıa
presentar una convergencia prematura hacia una respuesta que podrıa no ser la optima.
1 0 0 1 1
1 0 1 1 1
2.4.1.3. Colonia de Hormigas
[Gallego et al., 2008]
Las hormigas cuando buscan su alimento son capaces de encontrar el camino mas corto entre
el hormiguero y su comida, usando las feromonas como medio de comunicacion entre ellas,
Dorigo vio que este comportamiento podrıa ser usado en problemas de optimizacion.
Las hormigas exploran alrededor de su hormiguero de manera aleatoria, pero tan pronto
encuentran una fuente de alimento toman una parte de este y regresan a su hogar, deposi-
tando un rastro de feromona con el fin de que otras companeras pueden llegar al fuente de
alimento.

2.4 Como se puede resolver el problema de optimizacion. 29
Buscando estudiar este comportamiento en 1990 se hizo un experimento para estudiar los
mecanismos que permiten a las hormigas encontrar su alimento y llevarlo a su nido, que
consistio en crear un ambiente controlado donde existen dos posibles caminos de diferente
longitud pero de iguales caracterısticas con el fin de que los individuos pudieran escoger entre
un camino y otro con completa libertad (Figura 2-12)
Nido Alimento
Camino S
Camino L
A B
Figura 2-12.: Puente de Doble Vıa
Inicialmente presentan un comportamiento que podrıa ser aleatorio, pero transcurrido un
tiempo un alto porcentaje tiende a desplazarse por el camino mas corto.
Deneubourg y su grupo proponen un modelo estocastico para describir el comportamiento de
las hormigas, en este modelo una cantidad de hormigas ψ recorren el puente a una velocidad
de v cms
depositando feromona en su trayecto, los posibles caminos son LS y LL, por lo tanto
para que la hormiga transite el camino corto requiere ts =LS
vy el largo ts =
LT
v.
En este modelo:
Tiempo y espacio son discretos
Durante cada intervalo de tiempo los individuos se desplazan a igual velocidad.
Cada individuo deposita en su recorrido una pequena cantidad de feromona.
El argumento con que dispone una hormiga para decidir que camino tomar se determina
por el mayor grado de feromona acumulado.
La probabilidad pa de que una hormiga transite por cada instante de t se encuentra

30 2 Planteamiento del problema a resolver
determinado por la cantidad de feromona ϕa(t) depositada en cada trayecto del puente.
ps(t) =[ϕs]
α
[ϕs]α + [ϕl]α
pl(t) =[ϕl]
α
[ϕs]α + [ϕl]α
pl(t) + pl(t) = 1
(2-4)
El factor α es un parametro de ajuste que derivado de los experimentos con un valor
de 2.
La cantidad de feromona en el camino S para un sujeto que entra por A:
ϕAS(t) = ϕAS(t− 1) + ψA(t− 1)pas(t− 1) + ψB(t− 1)pBs(t− 1) (2-5)
ψA(t−1) y ψB(t−1) , la cantidad de individuos que entran por A y B respectivamente
Un ejemplo cualitativo que describe este comportamiento usando como base el sistema de la
Figura 2-12, donde el camino corto mide 3 y el largo 6, la velocidad de las hormigas es v=1
e ingresan inicialmente por el punto A de a parejas, a medida que una hormiga se desplaza
va depositando una unidad de feromona.
Los subsistemas se resumen en la Figura 2-13
A
l1 l2 l3 l4
B
S
ψAL1ψ
L1A
ψL1L2
ψL2L1
‘
ψL2L3
ψL3L2
ψL3L4
ψL4L3
ψL4B
ψBL4
ψAS
ψSA
ψSB
ψBSψB ψB
Figura 2-13.: Ejemplo Colonia de Hormigas
t=1
El grupo de hormigas parte del punto A, pero al no existir rastros de feromona la
probabilidad de escoger un camino u otro es la misma, ası que cada una toma un
camino diferente y depositan el primer rastro de feromona entre A-S y A-l1.

2.4 Como se puede resolver el problema de optimizacion. 31
t=2
El siguiente grupo que llega al punto A debido a que encuentran la misma cantidad de
feromonas en cada camino toman la misma decision que sus antecesoras, mientras que
la primera tanda continua hacia B y L2.
t=3
Las hormiga del primer grupo que tomo el camino mas corto encontro en el paso
anterior el alimento (B) y se devolvera, como tiene dos posibles caminos tendra que
tomar una decision basada en la cantidad de feromonas que encuentre en cada camino,
en este caso la eleccion es el camino por el que ella llego ya que es el unico que tiene
rastros de la sustancia, mientras que la hormiga que inicio con ella no le queda mas
remedio que seguir hacia L3. Los grupos que arrancaron en t igual a 2 y 3 siguen su
camino sin tener que tomar ninguna decision y el grupo que arranca en A no tiene
ningun criterio diferente al que tomaron sus companeras.
t=4
La hormiga del primer grupo llega al nido mientras que su companera hasta ahora llega
a L4, la que arranco en t=2 como llego a la comida en t=3, tomara la misma decision
de su companera de devolverse por el camino mas corto, el resto de hormigas tienen
un comportamiento igual al anterior.
t=5
Debido a que la primera hormiga ya regreso al nido y dejo un rastro de feromona entre
A y S se sufre un cambio en la toma de decisiones de las hormigas que llegan a A, ya
que van a preferir tomar el camino mas corto que el largo.
Llega a la comida la primera hormiga que tomo el camino mas largo
t=6
La hormiga que hasta ahora llego a la comida va devolverse y al encontrar un rastro
de feromona mayor por el camino corto va preferirse irse por este, de igual forma como
haran sus demas companeras que tomaron por el camino largo inicialmente. El resto
de las hormigas empezaran a tomar el camino mas corto.
2.4.1.4. Modelo Discreto
Cuando la funcion objetivo incluye o no una lınea entre dos puntos i y j es necesario usar
una variable binaria δ (Xi,j · δ, esto hace que el problema deje de ser continuo y se vuelva
un problema discreto.

32 2 Planteamiento del problema a resolver
2.4.1.5. Costos no Lineales
Los costos de un conductor se dividen en costos de operacion (CO) mas los costos de inversion
(CI) (Figura 2-14), donde los primeros al tener la forma I2R hacen que la funcion sea no
lineal.
Figura 2-14.: Costos de un conductor dado
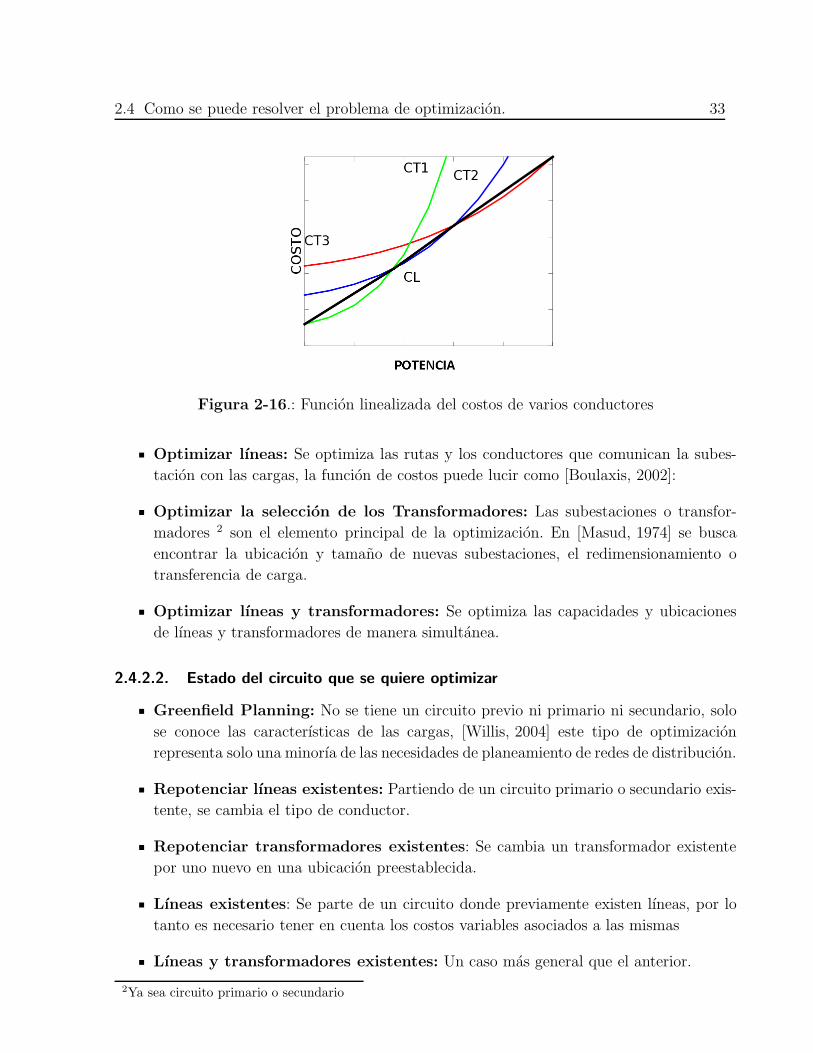
En algunos trabajos [Gonen, 1981] buscando disminuir la complejidad del problema, a par-
tir de los costos de diferentes conductores (Figura 2-15) se encuentra una funcion lineal
equivalente. (Figura 2-16).
Figura 2-15.: Costos de diferentes conductores
2.4.2. Enfoque del modelo
2.4.2.1. Elementos que se optimizan
El problema que se va resolver puede tener diferentes enfoques, por ejemplo:
2.4 Como se puede resolver el problema de optimizacion. 33
Figura 2-16.: Funcion linealizada del costos de varios conductores
Optimizar lıneas: Se optimiza las rutas y los conductores que comunican la subes-
tacion con las cargas, la funcion de costos puede lucir como [Boulaxis, 2002]:
Optimizar la seleccion de los Transformadores: Las subestaciones o transfor-
madores 2 son el elemento principal de la optimizacion. En [Masud, 1974] se busca
encontrar la ubicacion y tamano de nuevas subestaciones, el redimensionamiento o
transferencia de carga.
Optimizar lıneas y transformadores: Se optimiza las capacidades y ubicaciones
de lıneas y transformadores de manera simultanea.
2.4.2.2. Estado del circuito que se quiere optimizar
Greenfield Planning: No se tiene un circuito previo ni primario ni secundario, solo
se conoce las caracterısticas de las cargas, [Willis, 2004] este tipo de optimizacion
representa solo una minorıa de las necesidades de planeamiento de redes de distribucion.
Repotenciar lıneas existentes: Partiendo de un circuito primario o secundario exis-
tente, se cambia el tipo de conductor.
Repotenciar transformadores existentes: Se cambia un transformador existente
por uno nuevo en una ubicacion preestablecida.
Lıneas existentes: Se parte de un circuito donde previamente existen lıneas, por lo
tanto es necesario tener en cuenta los costos variables asociados a las mismas
Lıneas y transformadores existentes: Un caso mas general que el anterior.
2Ya sea circuito primario o secundario

34 2 Planteamiento del problema a resolver
Lıneas y transformadores futuros: Son modelos donde a pesar que no se tienen
estos elementos previamente construidos, existen algunos elementos donde su ubicacion
ya ha sido fijada, solo es variable el tipo de conductor o la potencia del transformador.
2.4.2.3. Espacio Temporal
MonoEtapa:
Es un modelo estatico donde no se tiene en cuenta la temporalidad de las inversiones
ya que se realizan en una unica etapa [Ripoll, 2004].
Multietapa
Modelo dinamico donde se consideran varias etapas teniendo en cuenta la temporalidad
del problema, se busca obtener el diseno optimo para cada una de las etapas intermedias
que componen el problema.[Mendoza, 2010]
2.4.2.4. Optimizacion Monoobjetivo o Multiobjetivo
Monoobjetivo: En un problema de optimizacion monoobjetivo se busca hallar los
valores de x = (x1, x2, X3, ...., Xn)T que minimizan o maximizan una funcion f(x)
[Ripoll, 2004].
Multiobjetivo: Existen problemas que estan sujetos a un conjunto de objetivos que
deben ser optimizados y que en la mayorıa de casos estan en conflictos, lo que sig-
nifica que no es posible mejorar un objetivo sin perjudicar al otro, en este tipo de
optimizacion no se encuentra una sola solucion sino una serie de buenas soluciones
y que sin ninguno otro tipo de informacion no se puede considerar una mejor que
otra.[Gallego et al., 2008]
2.4.2.5. Incertidumbre en la planeacion
Determinıstico: En un problema determinıstico se conoce con certeza las caracterısti-
cas de la variable a traves del tiempo.
Difuso: El proceso de planeacion puede incluir la incertidumbre de aspectos funda-
mentales cuya precision no se puede asegurar como la localizacion geografica, momento
temporal o cuantificar la demanda, lo cual crea un riesgo asociado a las decisiones que
se tomen en el momento de planeacion [Navarro, 2007], por esta razon surge la nece-
sidad de los modelos difusos que proveen representaciones mas reales en los modelos.
[Ramirez-Rosado, 2006]
En la elaboracion del estado del arte se encontraron diferentes metodologıas o formas de
abordar el problema de disenar una red de distribucion, la seleccion del enfoque apropiado
depende de los recursos con los que se cuenten y de la exactitud del modelo que se desee.

2.4 Como se puede resolver el problema de optimizacion. 35
Es un modelo complejo al ser un caso de programacion no lineal entera mixta de gran
cantidad de variables donde puede llegar a ser necesario usar aproximaciones y limitar el
problema para poder resolverlo.
3. Solucion Propuesta
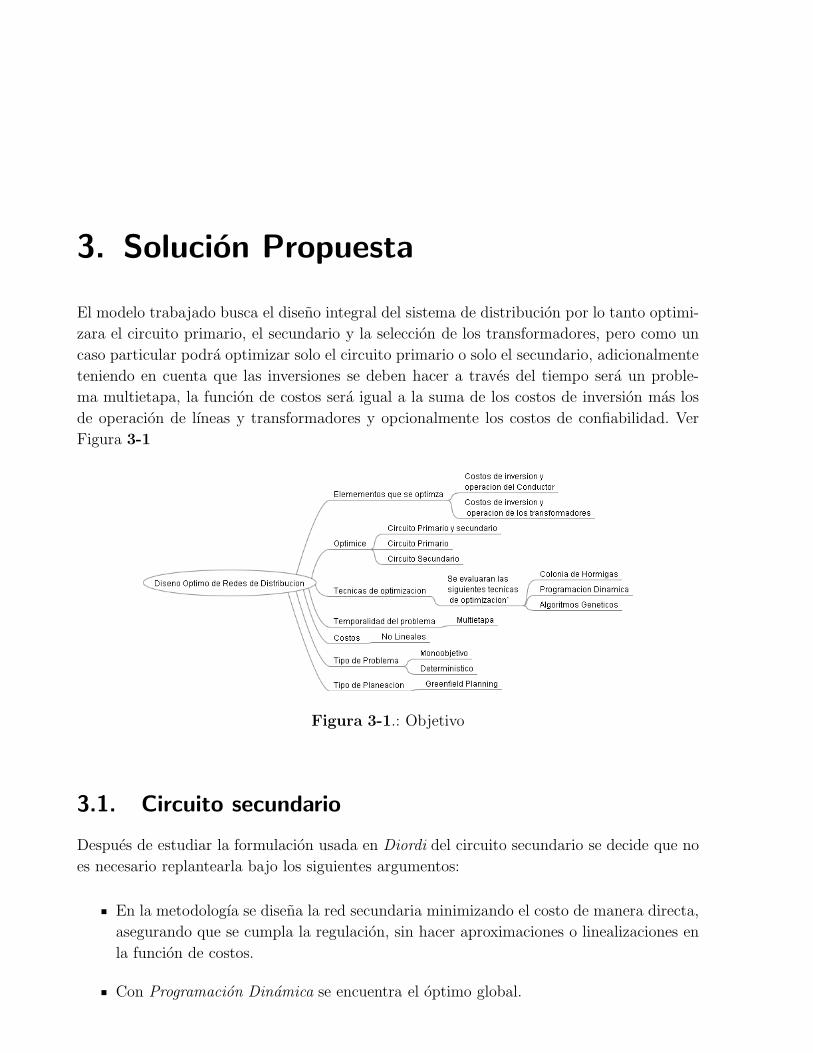
El modelo trabajado busca el diseno integral del sistema de distribucion por lo tanto optimi-
zara el circuito primario, el secundario y la seleccion de los transformadores, pero como un
caso particular podra optimizar solo el circuito primario o solo el secundario, adicionalmente
teniendo en cuenta que las inversiones se deben hacer a traves del tiempo sera un proble-
ma multietapa, la funcion de costos sera igual a la suma de los costos de inversion mas los
de operacion de lıneas y transformadores y opcionalmente los costos de confiabilidad. Ver
Figura 3-1
Figura 3-1.: Objetivo
3.1. Circuito secundario
Despues de estudiar la formulacion usada en Diordi del circuito secundario se decide que no
es necesario replantearla bajo los siguientes argumentos:
En la metodologıa se disena la red secundaria minimizando el costo de manera directa,
asegurando que se cumpla la regulacion, sin hacer aproximaciones o linealizaciones en
la funcion de costos.
Con Programacion Dinamica se encuentra el optimo global.

3.2 Circuito primario: 37
Una de las desventajas que tiene la Programacion Dinamica es que puede llegar con-
sumir grandes cantidades de tiempo, pero la implementada en Diordi no, por ejemplo
para el circuito de 63 nodos usado como ejemplo el tiempo aproximado es de 2 min y
para el de 118 se presenta un incremento de un 3 minutos aproximadamente.
Entre las posibilidades que existen para el diseno de una red secundaria se pueden
usar tecnicas metaheurısticas como Algoritmos Geneticos [Cossi et al., 2005] o ANT
Colony [Marroquin, 2008], que son tecnicas ampliamente usadas en diferentes campos
de la optimizacion, donde se pueden encontrar buenas respuestas cercanas a la optima,
previo a un ajuste apropiado sus parametros.
En [Alcazar, 1995]:
Despues de estudiar todos los casos de problemas reales de diseno de redes urbanas,
puede decirse que los resultados son bastante satisfactorios en lo referente a los circuito
secundarios....... Teniendo en cuenta los resultados descritos anteriormente, se puede
concluir que las rutinas relacionadas con el diseno de los circuitos secundarios no
requieren ser modificadas.
Pero se considera que es necesario corregir los siguientes puntos:
En el modelo actual puede presentarse el caso donde un nodo no tenga alimentacion.
No se tienen en cuenta los lımites maximos de temperatura que puede llegar a soportar
el conductor.
La seleccion del transformador esta sujeta a unos periodos fijos (Solamente al septimo
ano se evalua la necesidad de cambiar el transformador).
El factor de sobrecarga del transformador es fijo.
No se tiene en cuenta la depreciacion del costo del transformador en el momento del
cambio por uno nuevo.
El tiempo de diseno es fijo (15 anos para circuitos primarios y secundarios).
3.2. Circuito primario:
En Diordi para disenar el circuito primario se busca el arbol de mınima longitud que une
cada uno de los nodos donde estan ubicados los transformadores, basado en el supuesto de
que la magnitud de las perdidas y la regulacion para este circuito no son significativas y
por lo tanto el circuito de menor longitud sera el de menor costo. Esta simplificacion del
modelo ayuda a reducir los tiempos de calculo, pero debido a que es una aproximacion puede
presentar algunos inconvenientes:

38 3 Solucion Propuesta
La seleccion del conductor se realiza una vez que se ha encontrado el arbol de mınima
longitud, lo que puede traer un problema y es que la respuesta encontrada con los
conductores disponibles no cumpla las restricciones de regulacion o de cargabilidad.
Existe la posibilidad de que existan dos o mas soluciones con la misma longitud, pero
acorde a algun criterio de diseno convenga usar una respuesta mas que la otras, fijar
un criterio de seleccion actualmente no es posible.
Puede suceder que un circuito de una longitud mayor que el arbol mınimo, pero que
por el valor de sus costos de operacion, inversion y confiabilidad sea mejor.
Si previamente existe un circuito y lo quiero expandir, esta tecnica no es aplicable.
No es posible tener en cuenta variables adicionales.
Los anteriores puntos obligan encontrar un metodo con mayor flexibilidad y aplicarlo en la
nueva herramienta.
El objetivo del diseno optimo es minimizar costos, en Diordi se hizo de manera indirecta
para el circuito primario a traves de minimizar la longitud, en este trabajo se continua con
la hipotesis de la relacion distancia-costos, pero tambien se evalua optimizar directamente
una funcion de costos y optimizar el costo a traves del momento de los circuitos.
En este trabajo se compararon diferentes algoritmos: Arbol mınimo, Algoritmos Geneticos
y Ant Colony a traves de una serie de casos (Ver Capitulo 4) y se escogio la metodologıa
apropiada para ser implementada en Pydiordi. 1
Las restricciones del problema son:
I(i, ki) ≤ Ink: La corriente que va por el tramo i con el conductor k no se supere la
corriente nominal del conductor k.
V DAcum(i) ≤ V DMax La caıda de tension acumulada desde las colas del circuito
hasta el tramo i (incluyendo) debe ser menor o igual al lımite maximo permitido.
Ns ≤ NNodos Restriccion de radialidad de un sistema de distribucion.
Se debe asegurar la conexion entre todos los nodos obligatorios. 2
A continuacion se presenta la formulacion del problema de optimizacion del circuito primario
aplicando el concepto de:
Distancia.
1Esto no aplica para el circuito secundario, ya que en este se minimiza los costos directamente, pero queda
para trabajos futuros evaluar y comparar otras tecnicas de optimizacion aplicables a este circuito.2Los nodos obligatorios para el circuito primario son los transformadores y en el secundario son todos los
postes donde exista carga.

3.3 Funcion Objetivo (Costos): 39
Costos.
Momento.
3.3. Funcion Objetivo (Costos):
Circuito Primario : Corresponde a la suma de los costos de inversion y operacion
de las lıneas mas el costo de confiabilidad.
min(Zp) = CostoOperacion+ CostoInversion+ CostoConfiabilidad
Zp =Ns∑
i=1
[COl(i, ki) + CIl(i, ki) + CCl(i)]
Circuito Secundario :
Para poder obtener los costos de confiabilidad del circuito secundario es necesario
calcular y sumar los ındices de confiabilidad de cada uno de los k circuitos que lo
componen y calcular el IAD =∑k
i=1 IADi, para compararlo con el ındice de referencia
y ası obtener el costo de confiabilidad. En la actual metodologıa cada circuito k se
va construyendo paso a paso hasta encontrar la respuesta por tal motivo el ındice de
confiabilidad IAD solo se puede calcular una vez que se ha encontrado la respuesta
final, por tal motivo no se justifica calcular el costo de confiabilidad en este punto.
min(Zp) = CostoOperacion+ CostoInversion
Zp =
Ns∑
i=1
[COl(i, ki) + CIl(i, ki)] +
NT∑
i=1
[COT (i) + CIT (i)]
3.4. Funcion Objetivo (Distancia):
Circuito Primario: Basado en la premisa de la relacion de costo y distancia usada en
Diordi, se busca minimizar el arbol que conecta todos los nodos.
min(Zp) = Distancia
Zp =
Ns∑
i=1
Ns∑
j=1,i 6=j
[Xi,j · δi,j]
Donde δi,j es la existencia o ausencia de una conexion entre i y j:

40 3 Solucion Propuesta
δi,j =
0
1
Una vez que se ha encontrado el arbol mınimo, se usa el algoritmo de seleccion de conductor
que usa programacion dinamica para calcular los costos de inversion y operacion.
3.5. Funcion Objetivo (Momento):
Circuito Primario: Basado en la hipotesis de la relacion entre la sumatoria de los momentos
con la confiabilidad y la distancia y a su vez estas dos con los costos, se plantea la siguiente
funcion objetivo.
min(Zp) = Sumatoria de los Momentos
Zp =
NT∑
i=1
[Mi]
3.5.1. Metodo de los Momentos
Para una distribucion de nodos (Ver figura 3-2), donde cada uno tiene una carga de 50 kW
y 100 m entre ellos.
0
1
2
3
4
5
6
7
8
9
[100 m]
[100 m]
Figura 3-2.: Esquema de conexiones
Se pueden plantear diferentes soluciones como las mostradas en las figuras 3-3 y 3-4, donde
ambas tienen la misma longitud (usando el mismo tipo de conductor) se tienen los mismos
costos de inversion, pero diferentes costos de operacion. Calculando algunos ındices de con-
fiabilidad del sistema como el SAIFI, SAIDI o CAIDI 3 se encuentra que un circuito no
presenta mayores ventajas con respecto al otro. Ver Tabla 3-1
3Indices de confiabilidad mas usados segun Castano 2006

3.5 Funcion Objetivo (Momento): 41
0
1
2
3
4
5
6
7
8
9
Figura 3-3.: Posible circuito A
0
1
2
3
4
5
6
7
8
9
Figura 3-4.: Posible circuito B
Al plantear dos nuevas alternativas Figura 3-5 y 3-6 que tienen la mismas longitudes de
los dos casos anteriores por lo tanto el mismo costo de inversion, pero al calcular los ındices
de confiabilidad se encuentra que son menos favorables, ya que van a tener mayor cantidad
de interrupciones al ano (SAIFI) y de mayor duracion (SAIDI)(Ver Tabla 3-2), se puede
concluir que minimizando solamente la distancia no se tiene un argumento suficiente para
seleccionar adecuadamente una respuesta.
Usar como criterio de optimizacion los costos podrıa ayudar un poco esta tarea, ya que los
costos de operacion de los ultimos casos son mayores, pero puede que no sean lo suficiente-
mente diferentes entre sı.
Otra alternativa que se plantea en este trabajo es el uso de ındices de referencia que afectan
directamente la funcion de costos pero se necesita tener un ındice previamente calculado.
El momento electrico se define como el producto de la distancia por la carga kW · l y al
calcular la sumatoria para cada una de las cargas en los diferentes casos (Ver tablas 3-3,
3-4, 3-5 y 3-6), se observa que en los dos primeros casos es igual, pero la tercera es mayor
a los dos anteriores y la cuarta es la mayor de todas (mismo comportamiento de los ındices
de confiabilidad), este es el principio del metodo propuesto que consiste en minimizar la
sumatoria de los momentos electricos con el fin de encontrar un circuito que tenga mejores

42 3 Solucion Propuesta
Caso A B
Costo Operacion $ano
20,348 17,573
Costo Inversion $ano
2,341,469 2,341,469
SAIFI Interupciones
ano0.179 0.179
SAIDI horasano
2.0 2
CAIDI horasano
11 11
Tabla 3-1.: Datos Caso A y B
0
1
2
3
4
5
6
7
8
9
Figura 3-5.: Posible circuito C
0
1
2
3
4
5
6
7
8
9
Figura 3-6.: Posible circuito D
ındices de confiabilidad.
3.6. Calculo de Costos:
Las ecuaciones utilizadas para calcular los costos de inversion y operacion de transformadores
y conductores y el costo de confiabilidad son las siguientes:

3.6 Calculo de Costos: 43
Caso C D
Costo Operacion $ano
21,273 23,123
Costo Inversion $ano
2,341,469 2,341,469
SAIFI Interupciones
ano0.194 0.208
SAIDI horasano
2.1 2.1
CAIDI horasano
11 11
Tabla 3-2.: Datos Caso C y D
Carga Longitud[m] Carga[kVA] Momento [kV A ·m]
1 200 50 10,000
2 200 50 10,000
3 100 50 5,000
4 300 50 15,000
5 200 50 10,000
6 300 50 15,000
7 400 50 20,000
8 300 50 15,000
9 400 50 20,000
Total [kV A ·m] 120,000
Tabla 3-3.: Momento Electrico Caso A
Costos de operacion del Conductor: La ecuacion usada en Diordi es viene de
[Tram, 1988]:
COl(i, ki)
[$
ano
]= 10−5 · Rikp.u · F lu
2i1 · FT · CL · CC ·NFA
Pero los resultados calculados con esta ecuacion no fueron satisfactorios, por lo tanto
se decidio replantear la formulacion. En [Ramirez, 2004] el costo de operacion se puede
calcular de la siguiente forma:
COl(i, ki)[$] = 0,001 ·NFA · I20 · Rik · 8760 · e · FPer ·N∑
i=1
(1 + r)2i
(1 + rat)i
Que a su vez se puede escribir:

44 3 Solucion Propuesta
Carga Longitud[m] Carga[kVA] Momento [kV A ·m]
1 200 50 10,000
2 100 50 5,000
3 200 50 10,000
4 300 50 15,000
5 200 50 10,000
6 300 50 15,000
7 400 50 20,000
8 300 50 15,000
9 400 50 20,000
Total [kV A ·m] 120,000
Tabla 3-4.: Momento Electrico Caso B
Carga Longitud[m] Carga[kVA] Momento [kV A ·m]
1 200 50 10,000
2 100 50 5,000
3 200 50 10,000
4 300 50 15,000
5 200 50 10,000
6 300 50 15,000
7 400 50 20,000
8 500 50 25,000
9 600 50 30,000
Total [kV A ·m] 140,000
Tabla 3-5.: Momento Electrico Caso C
COl(i, ki)
[$
ano
]=
Pik
1000· FT · CL · CC ·NFA
• Pik: Las Perdidas en el tramo i al usar el conductor k (Figura 3-7) por un flujo
de potencia F lui1 .

3.6 Calculo de Costos: 45
Carga Longitud[m] Carga[kVA] Momento [kV A ·m]
1 200 50 10,000
2 100 50 5,000
3 200 50 10,000
4 300 50 15,000
5 200 50 10,000
6 300 50 15,000
7 400 50 20,000
8 500 50 25,000
9 400 50 20,000
Total [kV A ·m] 130,000
Tabla 3-6.: Momento Electrico Caso D
FLu1
Xik+Rik
Pik
Figura 3-7.: Perdidas en Carga
Pik [W ] =| ∆V 2
i |
| Z |· cos(Φi)
| Z | [Ω] =√R2
ik +X2ik
Φi = atanXik
Rik
Donde la caıda en p.u en el ano 1 es:
| ∆Vi | [V ] =| ∆Vi p.u. | ·V Base · 1000
| ∆Vi,1 p.u. | [p.u.] = 10−5 · (Rik p.u. · cos(Θ) +Xik p.u. sin(Θ)) · F lui1 ·li
1000
F lui1 [kV A] =F lui
NFA
(1 + r)N−1
• | ∆Vj p.u. | : Proviene de [Tram, 1988] y se valido al compararla con la formu-
lacion mostrada en [Ramirez, 2004] ( uso de constantes de regulacion, metodo
comunmente usado por la empresas distribuidoras de energıa).

46 3 Solucion Propuesta
Figura 3-8.: Factor Totalizador
• FT Factor totalizador.
El factor totalizador es el encargado convertir costos con un crecimiento r en el
tiempo, a un valor presente equivalente con una tasa de retorno rat. (Figura 3-8).
La formulacion usada en Diordi :
FT (N) =(rat + 1)15 − (1 + r)30
(1 + rat)15 · [(1 + rat)− (1 + r)2]
Esta ecuacion es valida para proyectos con una vida de 15 anos, para usarla en
un tiempo N es necesario rescribirla:
FT (N) =(1 + r)2N − (1 + rat)N
(1 + rat)N · [(1 + r)2 − (1 + rat)]
La formulacion proviene de [Nickel, 1981], y se valida ya que se usa por la en
[ICONTEC, 1997].
FT (N) =(rat + 1)N − (1 + r)2N
(1 + rat)N · [(1 + rat)− (1 + r)2]
• CC(N) Factor serie anual equivalente. Es el encargado de convertir un costo que
esta en valor presente a un valor anual equivalente.
CC(N) =rat · (1 + rat)N
(1 + rat)N − 1

3.6 Calculo de Costos: 47
Figura 3-9.: Factor serie anual equivalente
• CL Costo compuesto de perdidas.
CL(N)
[$
kW − ano
]= d+ 8760 · FPer · e
Fper = a · Fcar + b · Fcar2
En esta esta ecuacion se realiza un cobro binomio de la energıa aunque actual-
mente es monomio. CREG 77 de 1997.
’Costo de prestacion del servicio (CPS): Es un costo maximo monomio que resulta
de calcular, la suma de todos los costos economicos de eficiencia en que incurre
el prestador del servicio para suministrar una unidad de energıa, no afectado por
subsidios ni contribuciones y sobre el cual se calcula el valor de la factura al
usuario’.
Se decide dejar la ecuacion original de tal forma que se pueda usar como binomio
o como monomio.
Costos de inversion del Conductor:
CIl(i, ki)
[$
ano
]= CC · li · [nfa · Pre(k) +No · Pre(k
′)]
Costos del transformador son:
COT (i, k)
[$
ano
]= COTPo(i, k) + COTPk(i, k)
En Diordi el costo de operacion del transformador es:

48 3 Solucion Propuesta
COT (i, k) =
[[P0,1
CC(8)+
P0,2
CC(7)(1 + rat)8
]· (d+ 8760 · e) + cl · PPCN
]· CC(15)
PPCN =PPC1 · [(1 + rat)8 − (1 + r)16] +
[PPC2 ·
((1+rat)7−(1+r)14
(1+rat)7
)]
(1 + rat)8 [(rat+ 1)− (r + 1)2]
PPC1 = pc1 ·
(F lupot(i)
Pn1 · (1 + r)14
)2
PPC2 = pc2 ·
(F lupot(i)
Pn2 · (1 + r)6
)2
Y el costo de inversion :
CIT (i, k)
[$
ano
]= CC(N)
[PT1 +
PT2 − PT2
(1 + rat)8
]
El procedimiento de seleccion del transformador en Diordi se hace bajo las siguientes
condiciones: 3-10
1. La vida util del proyecto es 15 anos.
2. El costo del transformador no sufre depreciacion.
3. El factor de sobrecarga de los transformadores es del 10%.
4. Un transformador se instala en el punto A que es t=0, posteriormente se evalua
la capacidad del transformador en el ano B (7 anos) y si no es la adecuada se
remplaza por uno de mayor capacidad. Ver Figura 3-10.
Costo T1Costo T2
Costo Reposicion T1
Punto A Punto B Punto C
Figura 3-10.: Esquema de seleccion de transformadores
Para Pydiordi se realizaron las siguientes modificaciones:

3.6 Calculo de Costos: 49
• La ecuacion de perdidas en vacio se separo de la de perdidas en carga.
COT (i, k)
[$
ano
]= COTPo(i, k) + COTPk(i, k)
• Los costos de las perdidas se generalizaron de tal modo que se puede evaluar los
costos de las perdidas en carga y en vacio por separado en cualquier ano:
COTPo(i, k)
[$
ano
]=
P0,k
CC(X)· [d+ 8760 · e] · CC(N)
(1 + rat)Y
COTPk(i, k)
[$
ano
]= PPC · CC(n) · cl · FTt,i
PPC[kW ] = Pk ·
(F luT,i
(1 + r)N−Y−1 · Pn,i
)2
FTt,i =(1 + rat)X − (1 + r)2·X
(1 + rat)X [(1 + rat)− (1 + r)2]
PPC[kW ] = Pk ·
(F luT,i
(1 + r)N−Y−1 · Pn,i
)2
• La metodologıa de seleccion del transformador calcula el costo de todas las posi-
bles opciones usando un transformador instalado en el ano cero (0), y la de usar
dos transformadores instalando un remplazo de mayor potencia en cada uno de
los siguientes anos (hasta el ano final del proyecto) y se escoge la opcion mas
economica que cumpla con los requisitos tecnicos necesarios .
Adicionalmente en la nueva metodologıa se mejoro los siguientes aspectos:
1. Se cuenta con la flexibilidad de usar factores se sobrecarga para los trans-
formadores de acuerdo a las diferentes normas ANSI, IEC, ICONTEC, reco-
mendaciones del fabricantes o criterios del disenador.
2. Da la opcion de depreciar el costo del transformador.
Donde el precio de inversion por transformador es:
CIT (i, k)
[$
ano
]=1000 · CC(N) ·
(PTk
(1 + rat)Fi
)
− 1000 · CC(N) ·PTk
(1 + rat)Fi+Di·
(1−
DI
V D· V BD
)

50 3 Solucion Propuesta
La depreciacion del transformador es lineal DIV D
y solo se aplica cuando la variable
binaria V BD es igual a 1.
El procedimiento se valido y comparo con el propuesto a partir de lo descrito en la
[ICONTEC, 1997], con las siguientes caracterısticas:
• El uso de costos constantes.
• Se usa una tasa de crecimiento geometrico para la carga [Ramirez, 2004]
• Se usa un costo monomio de la energıa.
• Los costos estan totalizados en valor presente.
• La formula para la comparacion economica es:
Ctt[kW ] = PTk +K1 · P0,k +K2 · Pk + CER + CRF
Donde:
Ctt Costo Final evaluado del transformador.
K1
K1 = 8760 · e · b
b =(1 + rat)N − 1
rat · (1 + rat)N
El termino b es igual a CC(N).
K2
K2 = 8760 · e · d2 · FPer
d2 =
((1 + i)2N − (1 + rat)N
(1 + i)2 − (1 + rat)
)·
I2p
(1 + i)N
El termino d2
I2pes igual al FT .
CER Segun [ICONTEC, 1997]
El costo de la energıa por regulacion es bastante pequeno (menos del 3.5 %),
si se le compara con la inversion total del transformador y con los costos por
perdidas de potencia; en la mayorıa de casos son ignorados en la evaluacion
de perdidas por lo tanto CER = 0.
Costos de las perdidas por regulacion forzada no aplica para el tipo de trans-
formador usado CRF = 0 .

3.6 Calculo de Costos: 51
Figura 3-11.: El tiempo de salida anual del punto S
Costos de confiabilidad:
El tiempo de salida anual del punto S (Figura 3-11) se define como:
UL,i
[horas
ano
]=
Ns∑
i
λi · raaot
La energıa no entregada por un transformador k:
NDTk
[kWh
ano
]= F luT,i · Fcar · cosΘ · UL,i
Y la energıa no entregada de todos los transformadores que componen el circuito
primario:
NAD
[kWh
ano
]=
NT∑
k=1
NDTk
La energıa consumida en un ano del circuito primario es:
V T
[kWh
ano
]= F lus · cos(Θ) · Fcar · 8760
Se calcula una relacion entre la energıa consumida y la no entregada.
IAD =NAD
V T
El valor del incentivo se calcula como la diferencia entre el IAD y el ındice de referencia
IRAD, multiplicado por el costo de racionamiento CR0.
∆DT
[$
kWh
]= (IAD − IRAD) · CR0

52 3 Solucion Propuesta
Finalmente se calcula el costo del incentivo anual.
CCl
[$
ano
]= ∆DT ·
V T
(1 + rcar)N−1· FT · CC(N)
3.7. Ajustes y descripcion del modelo utilizado:
1. Lenguaje de Programacion:
Diordi es una aplicacion MS-DOS incompatible con Windows 7 y 8 y posiblemente tam-
bien con versiones posteriores de este sistema operativo, por lo tanto para ejecutarlo es
usar emuladores de DOS como DOSBOX. Si se desea actualizarlo primero es necesario
transcribirlo debido a que el codigo fuente no se encuentra en medios magneticos. Par-
tiendo de este punto se decidio evaluar la posibilidad de usar un lenguaje de programa-
cion mas moderno (Python), a pesar de que Pascal continua siendo un lenguaje vigente4 y se puede descargar un compilador multiplataforma como FreePacalWindows.
Por que Python ?
El problema de la perdida del codigo Diordi se soluciona con un lenguaje de
programacion interpretado ya que el codigo fuente esta presente.
Python es un lenguaje de programacion multiplataforma, lo cual permite que el
mismo programa pueda ser ejecutado en diferentes sistemas operativos sin nece-
sidad de crear versiones especıficas para cada uno.
Es software libre por lo tanto no requiere de la compra de licencias para poder
ser usado y distribuido libremente (Ver Manual de usuario B.1) al igual que los
productos elaborados con el.
Segun a 5 Python es un lenguaje mas popular que Pascal.
Federico Milano [Milano, 2013] desarrollador de PSAT Power System Analysis
Toolbox expone algunos de sus argumentos para migrar su herramienta de Matlab r
a Python.
• Python es un lenguaje interpretado dinamico y seguro.
• Es un lenguaje moderno totalmente basado en clases bien estructuradas ( a
diferencia de otros lenguaje cientıficos como Matlab r o R), que hace facil
la creacion, mantenimiento y reuso del codigo orientado a objetos.
• Como la mayorıa de los lenguajes de scripting, Python hereda las mejores
caracterısticas y conceptos de lenguajes (como C o Fortran) y es un lenguaje
estructurado (como Haskell).
4http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html5http://www.tiobe.com/index.php/content/paperinfo/tpci/index.html (Pagina consultada el 2014/03/21)

3.7 Ajustes y descripcion del modelo utilizado: 53
• Librerıas como NumPy y CVXOPT proveen una conexion a bibliotecas como
( BLAS, LAPACK, UMFPACK, etc. ) para manipular arreglos multidimen-
sional, algebra lineal, analisis de eingenvalores o matrices dispersas.
• Gracias a librerıas como MatPlotlib la habilidad de producir graficas en 2D
es poderosa como Matlab r.
• Dado que la herramienta desarrollada se basa en Diordi y se escribio en Pyt-
hon, se decide llamar la herramienta Pydiordi.
2. Optimiza el costo de manera directa:
En Diordi el circuito primario se escoge minimizando la distancia que une todos los
transformadores, pero tal metodologıa presenta los problemas anteriormente mencio-
nados, por esto en Pydiordi los costos se optimizan de manera directa.
3. La metodologıa usada para minimizar la funcion objetivo:
La solucion implementada en Diordi encuentra el circuito primario con el algoritmo
de Kurskal [Robert, 1995] (ya que solo se puede minimizar distancia), en Pydiordi se
uso un AG que da mayor flexibilidad al modelo.
4. Tipos de lıneas: El modelo desarrollado asume un circuito electrico serie ( sin capaci-
tancias), por lo tanto esta adaptado para redes aereas. Adaptar el modelo para trabajar
con redes subterraneas requiere introducir un modelo π que considere la capacitancia.
5. Unidades Constructivas:
El diseno de una red de distribucion de energıa es un problema de optimizacion combi-
natorial cuyo tiempo de solucion no es determinıstico ( NP-Hard) [Khaitan and Gupta, 2012],
por tal razon en diferentes trabajos encontrados sobre ’Optimizacion de redes de dis-
tribucion’, se minimiza los costos de transformadores y lıneas (se omiten costos cuchi-
llas, seccionadores, cajas, bancos de condensadores, etc...), esta simplificacion es valida
segun [Willis, 2004] ya que no existe un metodo de optimizacion perfecto que sea capaz
de considerar todos los factores que describen completamente una red de distribucion.
6. Costos de Confiabilidad:
En el trabajo realizado se busca complementar el modelo introduciendo el costo de
confiabilidad de circuito en la funcion objetivo de costos, usando como referencia
la regulacion colombiana (Resolucion CREG 097 del 2008). Existen diferentes tra-
bajos que lo hacen de manera directa en la misma funcion de optimizacion como
[Miranda et al., 1994] y otros lo hacen a traves de funciones multiobjetivo como [Mendoza, 2010]
, [Ripoll, 2004] o [Bernal, 1998].
min(Zp) = CostoOperacion+ CostoInversion+ CostoConfiabilidad

54 3 Solucion Propuesta
7. Arreglo de los resultados mostrados por Diordi:
Se solucionaron algunas inconsistencias en los resultados del circuito primario:
En el consolidado de los conductores no aparecen todos los conductores usados.
La longitud total de los conductores no esta correctamente calculada.
Los costos de operacion son incorrectos.
8. Parametros de entrada:
La vida del proyecto es seleccionada por usuario, en Diordi el proyecto tiene una
vida util de 15 anos.
No se limitan los espacios para unidades de los costos, p.e. los costos de la energıa
esta limitado a 2 unidades (precio maximo es 99 peso kwh).
9. Datos de entrada para la herramienta: Se cambia la forma de introducir la infor-
macion en la herramienta con el fin de reducir tiempos. (Ver Manual de usuario) B.3.1,
se puede digitar desde una hoja de calculo o un editor de texto como Notepad++ .
10. Depuracion de la informacion: En Diordi la introduccion de datos se hace a partir
de un DOS command promp y los resultados se visualizan en un archivo de texto
Salida.dat, en la herramienta los datos de entrada se pueden visualizar al igual que los
circuitos de salida. (Ver manual de usuario) 3.
11. Ecuaciones Utilizadas Se validaron cada una de las ecuaciones utilizadas y algunas
de ellas fueron replanteadas.
12. Seleccion del transformador: La formulacion de seleccion del transformador se
replanteo Ver 3.6.
13. Nodos sin conexion: En la metodologıa usada en Diordi en el circuito secundario se
corrıa el riesgo de que quedaran nodos sin conectar, esto se soluciono en Pydiordi ya
que en el momento de escoger un circuito secundario y sacar los nodos que lo componen
de la base de datos, se verifica que esto no deje sin conexion a otros nodos.
14. Flexibilidad: Se permite dividir el proceso de optimizacion en etapas para realizar
los ajustes que se consideren necesarios, por ejemplo se puede ejecutar el secundario y
si el usuario ası lo considera realizar modificaciones a las entradas del primario antes
de ejecutarlo, ejecutar solo el primario o ambos de manera simultanea.
3.7.1. Python Scripting:
Uno de las nuevas ventajas que ofrece Pydiordi es la posibilidad de correr muchos casos de
manera automatica y ası poder realizar analisis sobre el comportamiento de las respuestas.

3.7 Ajustes y descripcion del modelo utilizado: 55
Para entender esta seccion se requieren conocimiento basicos de Pyhton, si no se tiene se
recomienda leer algunos de los siguientes textos:
Documentacion oficial de Python 3.x.
How to Think Like a Computer Scientist.
3.7.1.1. Valores por defecto:
El caso mas simple de scripting es el mostrado en el archivo correrCasos.py.
Se define la cantidad de casos que se quieren ejecutar.
cantidadCasos = 100
La ruta donde esta instalado Python.
pythonPath = ”C:\Python32\python . exe”
Se llama el script primario junto con sus parametros normales:
• -i El archivo que contiene la informacion de los arcos y sus cargas.
• -c Se indica que se va correr el circuito primario.
• -g Con el parametro 0 para que no genere una salida grafica del circuito y pase
automaticamente de un caso a otro.
os . system ( pythonPath + ’ pr imar io . py − i s a l i daSecunda r i o / a lPr imar io . csv −c
1 −g 0 ’ )
Una vez terminada la ejecucion del script lo copia a una carpeta .
copyDirectory (” sa l i daPr imar i o ” , d i r e c t o r i o S a l i d a + ”/ sa l i daPr imar i o ” +
s t r ( i ) )
Se repite el procedimiento hecho para el primario pero ahora con el circuito secundario.
os . system ( pythonPath + ’ secundar io . py − i conex iones / conex ionesSecundar io
. csv −c 2 −g 0 ’ )
copyDirectory (” sa l i daSecunda r i o ” , d i r e c t o r i o S a l i d a + ”/ sa l i daSecunda r i o ”
+ s t r ( i ) )
cantidadCasos = 100
pythonPath = ”C:\Python32 \python . exe ”
f o r i in range ( cantidadCasos ) :
os . system ( pythonPath + ’ pr imar io . py − i
s a l i daSecunda r i o / a lPr imar io . csv −c 1 −g 0 ’ )

56 3 Solucion Propuesta
copyDirectory (” sa l i daPr imar i o ” , d i r e c t o r i o S a l i d a + ”/ sa l i daPr imar i o ” + s t r ( i
) )
os . system ( pythonPath + ’ secundar io . py − i conex iones / conex ionesSecundar io .
csv −c 2 −g 0 ’ )
copyDirectory (” sa l i daSecunda r i o ” , d i r e c t o r i o S a l i d a + ”/ sa l i daSecunda r i o ” +
s t r ( i ) )
En este caso se corren cien casos de optimizacion del circuito secundario y del primario.
3.7.1.2. Scripting Avanzado
De igual manera se pueden correr la cantidad de casos que desee el usuario pero modificando
los parametros que considere necesario, por ejemplo si se desea ver el comportamiento de
variar la tasa de crecimiento se puede realizar el siguiente procedimiento:
1. Modificar el archivo correrCasos.py.
Se anade una lınea que contenga los valores que va tomar la tasa de crecimiento.
TasaCrecimiento = [ x/100 f o r x in range (20 , 50 , 5 ) ]
TasaCrecimiento = [ 0 . 0 2 , 0 . 03 , 0 . 0 4 ]
[0.2, 0.25, 0.3, 0.35, 0.4, 0.45]
Se crea un ciclo que recorra el vector definido.
f o r i in range ( l en ( TasaCrecimiento ) ) :
El valor de la tasa de crecimiento se pasara como parametro adicional al script
que se va ejecutar, en este caso se hace a traves de la letra t
−t ’+ s t r ( TasaCrecimiento [ i ] )
f o r i in range ( l en ( TasaCrecimiento ) ) :
os . system ( pythonPath + ’ secundar io . py − i conex iones /
conex ionesSecundar io . csv −c 2 −g 0 −t ’+ s t r ( TasaCrecimiento [ i ] ) )
copyDirectory (” sa l i daSecunda r i o ” , d i r e c t o r i o S a l i d a + ”/ sa l i daSecunda r i o
” + s t r ( i ) )
2. Posteriormente se modifica el archivo entrada.py.
Con parser.add option se asignan los parametros de entrada a una variable, en
este caso a la variable tasa.
En las primeras lıneas donde se asignan los parametros de entrada del script, se
agrega el nuevo parametro.

3.7 Ajustes y descripcion del modelo utilizado: 57
pa r s e r = OptionParser ( )
pa r s e r . add option (”− i ” , ”−−input ” , des t=”input ”)
pa r s e r . add option (”−c ” , ”−−c i r c u i t ” , des t=”c i r c u i t ”)
pa r s e r . add option (”−g ” , ”−−graph ” , des t=”graph ”)
pa r s e r . add option (”− t ” , ”−−tc ” , des t=”tasa ”)
Se comenta la lınea donde esta el parametro original y se agrega lo siguiente.
#TasaCrecimiento = 0 .03
TasaCrecimiento = f l o a t ( opt i ons . ta sa )
3.7.2. Diagrama de Flujo:
Los diagramas de flujo de los componentes principales del programa son :
Primario: Para optimizar la funcion objetivo del circuito primario se uso un Algorit-
mo Genetico Canonico su diagrama de flujo es (Figura 3-12) y la descripcion de los
operadores usados es la siguiente:
• Creacion de individuos:
La generacion de los individuos de la poblacion inicial es lo suficientemente alea-
torio para permitir explorar de manera adecuada todas las zonas de busqueda
[Araujo, 2009], lo cual se logra de la siguiente manera.
En la figura 3-13 se muestran cuatro nodos que se deben conectar entre sı (A, B,
C y D), el nodo A corresponde a la ubicacion de la subestacion y los otros tres
restantes son usuarios, el procedimiento sera el siguiente:
1. De esos cuatros nodos, se escogen dos nodos de manera aleatoria, para este
ejemplo A y D.
2. Se escoge de manera aleatoria entre los dos vecinos del nodo A (2 y 5) para
formar un tramo. Figura (3-14). De manera similar se hace con el nodo D.
3. Se repite el mismo procedimiento para los nodos 2 y 11 y sucesivamente con
los demas nodos hasta que exista una conexion fısica entre A y D. Figura
3-15
4. Se eliminan anillos y colas de circuito que no esten conectadas a ninguna de
las cargas escogidas. Figura 3-16
5. Los anteriores pasos se repiten con los nodos B y C. Figura 3-17.
6. Las dos combinaciones se unen en una sola Figura 3-18 para formar un solo
circuito, eliminando anillos y colas no deseadas.
7. A este circuito se le aplica el algoritmo para la seleccion del conductor.
8. Se verifica que las restricciones del problema se cumplan para ser aceptado.

58 3 Solucion Propuesta
Inicio
Entrada de datos
Generacion de poblacion inicial
Operador seleccion
Operador reproduccion
Operador mutacion
Escribir Resultado Iteracion
Criterio Convergencia
Escribir y mostrar resultado
Fin
SI
No
Figura 3-12.: Diagrama de flujo algoritmo de diseno del circuito primario
• Operadores usados con AG:
1. Seleccion: Basado en el criterio de optimizacion (Distancia, Costo o Momen-
to), se seleccionaran los X individuos con menor costo, distancia o momento
respectivamente.
2. Combinacion: Al combinar dos individuos (Figura 3-19), se puede encontrar
una solucion como la mostrada en (Figura 3-20 (a) ), pero debido que tiene
anillos es necesario eliminar ciertos tramos hasta encontrar una respuesta
como la que se muestra en la (Figura 3-20 (b) ).

3.7 Ajustes y descripcion del modelo utilizado: 59
B
A C
D
2 31 4
5
9
6
10
7
11
8
12
Figura 3-13.: Ejemplo de conexiones
B
A C
D
2 31 4
5
9
6
10
7
11
8
12
Figura 3-14.: Generando Individuo.
3. Mutacion: Partiendo de un individuo (Figura 3-21 (a) ) elemento, se cambian
dos tramos de tal forma que se llegue a una respuesta como (Figura 3-21 (b)
).
Secundario y Transformador: La metodologıa implementada para encontrar el cir-
cuito secundario es la Programacion dinamica Ver Figura 3-22
PythonC El motor de optimizacion se compone de un grupo de scripts en Python,
que pueden ser ejecutados desde un interprete de comandos en Windows o desde una
terminal desde Linux, de igual manera si la ruta de configuracion de Python esta co-
rrectamente configurada puede ser ejecutadas dando un click sobre el archivo correr-
Casos.py, pero buscando simplificar la ejecucion de los scripts en Windows se creo una
interfaz grafica de usuario (GUI) en C ♯, la cual se llamo PythonC Ver Figura 3-23.

60 3 Solucion Propuesta
B
A C
D
2 31 4
5
9
6
10
7
11
8
12
Figura 3-15.: Conexion Nodos A y D.
B
A C
D
Figura 3-16.: Individuo depurado
B
A C
D
Figura 3-17.: Conexion nodos B y C

3.7 Ajustes y descripcion del modelo utilizado: 61
B
A C
D
Figura 3-18.: Individuo Final
B
A C
D
Figura 3-19.: Combinacion de individuos
B
A C
D
B
AC
D
a) b)
Figura 3-20.: Operador Combinacion

62 3 Solucion Propuesta
B
A C
D
B
AC
D
Figura 3-21.: Operador Mutacion

3.7 Ajustes y descripcion del modelo utilizado: 63
Inicio
Escoge el nodo de conexion obligada
Lista de los nodos Transformador
Para cada nodo transformador
Generacion de topologias lineales
Combinaciones no lineales
Seleccion del conductor
Seleccion del transformador
la opcion de menor costo/usuariose almacena en un grupo
Del grupo de las opciones conmenor costo/usuario se escoge la de menor costo
Eliminar nodos de la base de datos
Nodos pendientes
Escribir y mostrar resultado
Fin
No
Si
Entrada de datos
Figura 3-22.: Diagrama de flujo algoritmo de diseno del circuito secundario

64 3 Solucion Propuesta
Inicio
Entrada de datos
Ejecuta el Script "Generar Entrada"
Escribir y mostrar resultado
Ejecuta el script "Circuito Secundario"
Escribir y mostrar resultado
Ejecuta el script "Circuito Primario"
Escribir y mostrar resultado
Opciones
Fin
Ejecuta el script"Generar Entrada"
Escribir y mostrar resultado
Fin
Ejecuta el script "Circuito Primario"
Escribir y mostrar resultado
Fin
Entrada de datosEntrada de datos
Ejecuta el script "Circuito Secundario"
Escribir y mostrar resultado
Fin
Entrada de datos
Figura 3-23.: Diagrama de Flujo PythonC

4. Evaluacion de los algoritmos
seleccionados
4.1. Circuito Primario
Para la seleccion de la metodologıa primero se comparo los algoritmos de AG, Programacion
Dinamica y ANT usando como criterio de optimizacion minimizar la distancia, los resultados
encontrados favorecieron a las dos primeras metodologıas. Posteriormente se anadieron los
criterios de Costos y Momento al algoritmo de AG y se realizaron comparaciones entre todas
las metodologıas implementadas.
A continuacion se resumen la comparacion de las metodologıas estudiadas Diordi (Arbol
Mınimo - Distancia), Algoritmos Geneticos (Distancia - Costos - Momento) y Colonia de
hormigas - Distancia, a traves de una serie de casos donde se puedan evidenciar las ventajas
y desventajas de cada una. Para poder realizar la comparacion con Diordi fue necesario usar
magnitudes de costos acorde a las limitaciones del mismo, de igual manera se usaron en
Pydiordi los valores por defecto que tiene Diordi (sobrecarga de transformadores igual al
10%, tiempo de duracion del proyecto de 15 anos).
4.1.1. Casos de estudio
Se estudiaron dos circuitos, el primero de 63 nodos (Ver Figura 4-1) y otro de 118 nodos
(Ver figura 4-2). Los parametros de entrada son los mostrados en la tabla 4-1.
Notas:
1. Niveles de tension en Bogota [Codensa, 2009a]. .
2. El lımite de regulacion de tension segun [Codensa, 2009b] debe ser el 2% para circuitos
primarios y de 3% para circuitos secundarios.
3. Este es el valor maximo segun la resolucion CREG 108 1997, para que un usuario sea
considerado como residencial.
4. El precio de la energıa en Colombia es monomico .
5. Uno de los objetivos de esta parte es comparar los resultados de Diordi con los de
Pydiordi, pero por las restricciones en los datos de entrada en Diordi es necesario
ajustar los precios.

66 4 Evaluacion de los algoritmos seleccionados
Figura 4-1.: Plano caso 1
Figura 4-2.: Plano caso 118 Nodos
6. Segun [Codensa, 2014] .

4.1 Circuito Primario 67
Tension en el circuito primario (kV) 11.4 (Ver nota 1)
Tension en el circuito secundario (kV) 0.208 (Ver nota 1)
Regulacion para la red primaria % 2 (Ver nota 2)
Regulacion para la red secundaria % 1 (Ver nota 2)
Carga de diseno por usuario (kVA ano 15) 3 (Ver nota 3)
Costo de potencia ($-kW) 0 (Ver nota 4).
Costo de energıa ($-kWh) 39.33 (Ver nota 5)
Factor de potencia (pu) 0.9 (Ver nota 6).
Tipo de red Trifasica
Factor de carga (fc) 0.7 (Ver nota 7)
Coeficiente a del fc 0.17 (Ver nota 8)
Coeficiente b del fc 0.83 (Ver nota 8)
Tasa de retorno (pu) 0.11 (Ver nota 10)
Tasa de crecimiento anual (pu) 0.03 (Ver nota 9)
Tabla 4-1.: Datos Generales
7. Usando como referencia la Figura 4 Caracterizacion de la demanda de [Codensa, 2014]
.
8. En [Codensa, 2014] se sugiere usar a = 0.1247 y b = 0.8753, pero se usan los valores
del trabajo [Perez et al., 1990].
9. Tasa de crecimiento estimado por la UPME para el 2025.
10. En [Codensa, 2014] se sugiere usar 0.139, pero se usan los valores del trabajo [Perez et al., 1990].
Segun la experiencia del autor se recomienda los siguientes valores para los parametros de
ajuste:
Criterio de convergencia: 0.9.
Tamano de la poblacion: 50.
Maximo numero de generaciones: 250.
Tasa de cruce: 0.9.
Probabilidad de mutacion: 0.1.
Cantidad de estados: mVE = 10.

68 4 Evaluacion de los algoritmos seleccionados
4.1.2. Criterio de seleccion de metodologıas
Para la seleccionar la metodologıa mas apropiada para ser implementada en Pydiordi se
tuvieron en cuenta dos criterios:
La calidad de las respuestas encontradas.
La dispersion de las respuestas encontradas.
4.1.2.1. Calidad:
Dado que ambas son tecnicas de optimizacion metaheurısticas (AG y ANT) pueden tener
problemas de convergencia y llegar a mınimos locales si no se usan de manera adecuada, por
lo tanto es importante evaluar la capacidad del algoritmo de encontrar la respuesta optima
o por lo menos una muy cercana a esta.
4.1.2.2. Dispersion de datos
Por la naturaleza aleatoria de los metodos, las respuestas encontradas en diferentes corridas
pueden ser diferentes entre sı, debido a esto se deben analizar dos puntos importantes:
1. El algoritmo programado debe asegurar que cuando se corra varias veces el mismo caso
se llegue la mayor cantidad de veces posibles a la misma respuesta Repetitividad.
2. Si las respuestas encontradas no son iguales en las diferentes corridas, por lo menos sean
lo suficiente cercanas entre si Cercanıa de las respuestas, por ejemplo visualmente
en la funcion Sombrero Mexicano existen diferentes puntos que minimizan la funcion
(Ver figura 4-3)
Figura 4-3.: Sombrero Mexicano

4.1 Circuito Primario 69
4.1.3. Resultados Encontrados
Caso 63 nodos: Se corrieron 100 casos 1 entre los cuatro posibles criterios de optimi-
zacion (AG : Distancia, Costo, Momento y ANT Colony: Distancia).
Caso 118 nodos: Se corrieron en 45 casos 2 entre los tres criterios de optimizacion
(AG : Distancia, Costo y ANT Colony: Distancia). 3
4.1.3.1. Caso 63 nodos:
El consolidado de los 100 casos corridos se muestra a continuacion.
Diordi: Ver tabla 4-2
Costo Total[
$ano
]Distancia [m]
2,185,614 833
Tabla 4-2.: Resultado Diordi - Distancia
AG Distancia: Ver tabla 4-3
Costo Total[
$ano
]Distancia [m]
x 2,277,779 867
σ 7,786 3
Max 2,308,008 879
Min 2,275,903 866
Tabla 4-3.: Estadıstica Pydiordi - AG Distancia
AG Costo: Ver tabla 4-4
AG Momento: Ver tabla 4-5
ANT Distancia: Ver tablas 4-6.
El caso Distancia - AG presenta la menor dispersion de datos (σ = 3 en distancia y
7,786 en costo), seguido de Costos - AG, Momento - AG y Distancia - ANT.
120 casos de cada uno215 casos de cada uno3No se corrieron con el metodo de los momentos ya que como se mostrara con el caso de 63 nodos el
comportamiento no fue muy bueno y no se considero necesario.

70 4 Evaluacion de los algoritmos seleccionados
Figura 4-4.: Ejemplo circuito primario segun Pydiordi - AG Distancia
Costo Total[
$ano
]Distancia [m]
x 2,282,589 869
σ 16,813 7
Max 2,324,471 886
Min 2,272,090 866
Tabla 4-4.: Estadıstica Pydiordi - AG Costos
En el momento de escoger un metodo con respecto a otro se debe tener en cuenta
la variabilidad de las respuestas encontradas, ya que entre menor dispersion en las
respuestas es mejor, por ejemplo el σ de Distancia - AG es alrededor de 7 veces menor
que el calculado con ANT - Distancia).
En los anteriores resultados se observa la relacion Costo - Distancia (el circuito de
menor distancia es el de menor costo). En este caso el algoritmo ANT - Distancia fue
el que encontro la respuesta de menor longitud 850 m, pero con una variabilidad muy
alta (σ = 50, 832).
A medida que se aumente la cantidad de variables (numero de nodos) seguramente la
dispersion se incrementara y de manera proporcional la incertidumbre acerca de si las
respuestas encontradas seran las mas apropiadas, por tal razon se realizaron variaciones
en los parametros de ajuste.
Parametros de ajuste
Los parametros de ajuste dependen de la metodologıa estudiada:

4.1 Circuito Primario 71
Figura 4-5.: Ejemplo circuito primario segun Pydiordi - AG Costos
Costo Total[
$ano
]Distancia [m]
x 2,488,654 953
σ 50,832 19
Max 2,663,626 1,020
Min 2,451,621 939
Tabla 4-5.: Estadıstica Pydiordi - AG Momento
Algoritmos Geneticos: Los principales factores son la tasa de mutacion, tasa de
cruce, el tamano de la poblacion y el criterio de convergencia.
Colonia de hormigas: Cuando una hormiga esta en un punto i y tiene la opcion de
escoger diferentes puntos (N ki ) , la probabilidad de escoger un punto j esta dada por :
pkij =[τij ]
α · [nij]β
∑l∈N k
i[τil]
α · [nil]β (4-1)
Donde:
• nij =1dij
, dij es la distancia entre los puntos i y j
• τij : Cantidad de feromona en el arco i,j, la cual se evapora de la siguiente forma:
τij = (1− ρ) · τij

72 4 Evaluacion de los algoritmos seleccionados
Figura 4-6.: Ejemplo circuito primario segun Pydiordi - AG Momento
Costo Total[
$ano
]distancia [m]
x 2,316,390 883
σ 56,556 22
Max 2,440,147 931
Min 2,232,042 850
Tabla 4-6.: Estadıstica ANT - Distancia
• α y β, son los parametros que determinan la influencia relativa entre la cantidad
de feromona τij y la distancia dij.
Variando algunos de estos parametros buscando mejorar la calidad de las respuestas, por
ejemplo en ANT Colony se cambia el valor de ρ de 0.01 a 0.02 y 0.5 o el β de 0.7 a 2 y 4 y
en Algoritmos Geneticos, se varıa la convergencia de 0.9 al 0.95
En ANT se variaron diferentes parametros, pero no se encontro una mejora significativa
en las respuestas, la longitud de la mejor respuesta cambio 850 [m] a 840 [m], de manera
contraria en AG con una pequena variacion se logro una mejora en la respuesta de
866[m] a 833[m], que en este caso es la respuesta optima.
Para mejorar la eficiencia del algoritmo de ANT Colony, [Dorigo, 2004], propone ciertas
variaciones o extensiones para mejorar la busqueda .
De manera resumida se presentan las posibles variaciones:

4.1 Circuito Primario 73
Figura 4-7.: Ejemplo circuito primario segun ANT - Distancia
g
i
j
?
Figura 4-8.: Hormiga desde el punto i tiene la opcion de ir al punto g, j o k
1. Ant Colony System: La probabilidad de escoger un punto j desde un punto i
se convierte en:
j =
argmaxl∈N k
iτil [ηil]
β[τij ]·[nij ]
β
∑l∈Nk
i[τil]·[nil]
β si q ≤ q0
La evaporacion de la feromona se realiza de la siguiente forma:

74 4 Evaluacion de los algoritmos seleccionados
Costo Total[
$ano
]Distancia [m]
x 2,307,527 880
σ 57,767 22
Max 2,396,080 915
Min 2,202,911 840
Tabla 4-7.: Estadıstica ANT - Distancia ρ = 0,02
Costo Total[
$ano
]Distancia [m]
x 2,320,083 883
σ 53,619 21
Max 2,396,080 915
Min 2,202,911 840
Tabla 4-8.: Estadıstica ANT - Distancia ρ = 0,5
τij = (1− ρ) · τij + ρ ·∆bsij
τij = (1− ξ) · τij + ξ · τ0
2. Approximate Nondeterministic Tree Search:
El criterio de seleccion se convierte en :
pkij =ζ · τij + (1− ζ) · nij∑
l∈N kiζ · τil + (1− ζ) · nil
Y la evaporacion de la feromona:
τij = τij +m∑
k=1
∆τkij
Donde δτij
∆τij =
ϑ
(1− Ck−LB
Lavg−LB
), si arc(i, j) perteneceT k
0

4.1 Circuito Primario 75
Costo Total[
$ano
]Distancia [m]
x 2,352,652 897
σ 54,940 21
Max 2,433,763 928
Min 2,230,575 850
Tabla 4-9.: Estadıstica ANT - Distancia β = 2
Costo Total[
$ano
]Distancia [m]
x 2,360,519 900
σ 55,792 21
Max 2,487,391 947
Min 2,294,987 875
Tabla 4-10.: Estadıstica ANT - Distancia β = 4
3. Hyper-Cube Framework for ACO:
El proceso de evaporacion de feromonas se replantea de la siguiente forma:
τij = (1− ρ) · τij + ρ ·m∑
k=1
∆kij
Donde δτij
∆τij =
1
Ck∑m
h=1
1
Ck
si; arc(i, j) usado arco k
0
Las diferentes variaciones tienen el fin de mejorar la busqueda de las hormigas, pero
es necesario replantear las ecuaciones agregando nuevos factores de ajuste (ξ, ζ, etc...
), lo cual complica el modelo.
En el caso de AG-Costos se vario el criterio de convergencia y se encontro una mejora
significativa en la respuesta.
4.1.3.2. Caso 118 Nodos
El consolidado de los 45 casos corridos se muestra a continuacion.
AG Distancia: Ver tabla 4-12 y figura 4-9.

76 4 Evaluacion de los algoritmos seleccionados
Costo Total[
$ano
]Distancia [m]
x 2,195,212 837
σ 28,045 11
Max 2,274,840 868
Min 2,185,614 833
Tabla 4-11.: Estadistica AG : Distancia - Costo convergencia = 0,95
Costo Total[
$ano
]Distancia[m]
x 41,625,762 13,263
σ 883,945 222
Max 43,562,585 13,660
Min 40,236,149 12,840
Tabla 4-12.: Estadıstica Pydiordi - AG : Distancia
Figura 4-9.: Resultado PyDiordi - AG Distancia
Costo: Ver tabla 4-13 y figura 4-10.
ANT: Ver tabla 4-14 y figura 4-11.
La variabilidad de las respuestas es menor en AG con respecto a ANT al igual que la
longitud y costo del circuito encontrado.

4.1 Circuito Primario 77
x 42,363,324 13,993
σ 1,983,796 509
Max 45,521,688 14,810
Min 40,343,203 13,380
Tabla 4-13.: Estadıstica Pydiordi - AG Costos
Figura 4-10.: Resultado PyDiordi - AG Costos
Figura 4-11.: Resultado ANT - Distancia

78 4 Evaluacion de los algoritmos seleccionados
x 49,421,711 15,307
σ 1,698,623 490
Max 52,628,871 15,920
Min 47,268,876 14,640
Tabla 4-14.: Estadıstica ANT - Distancia
4.1.4. Analisis de resultados
Se analizan los resultados encontrados anteriormente a la luz de los dos criterios de seleccion
anteriormente nombrados.
4.1.4.1. Calidad:
En los ejemplos corridos durante el desarrollo de este trabajo se encontro que los Algoritmos
Geneticos usando el criterio de Costos ( Ver Figura 4-12) o Distancia ( Ver Figura 4-13)
encontraron mejores respuestas.
AG Distancia AG Costos AG Momento ANT Distancia Diordi0
0.5
1
1.5
2
2.5x 10
6 Mejor Respuesta (Costos)
$/añ
o
CASOS
Figura 4-12.: Se muestra la comparacion de los costos encontrados por cada metodologıa
Gracias a la capacidad que tiene Pydiordi de correr gran cantidad de casos de manera
automatica, se aumenta la probabilidad de encontrar el optimo.

4.1 Circuito Primario 79
AG Distancia AG Costos AG Momento ANT Distancia Diordi0
100
200
300
400
500
600
700
800
900
1000Mejor Respuesta (Distancia)
Casos
[m]
Figura 4-13.: Se muestra la comparacion de las longitudes [m] encontradas por cada meto-
dologıa
4.1.4.2. Dispersion de datos
1. Repetitividad En el primer caso con AG tanto con Distancia y Costos se observa un
buen comportamiento (de 20 veces que se corrio el algoritmo encontro 18 y 15 veces la
misma respuesta con distancia y costos respectivamente) Ver Grafica 4-14 y 4-15.
Figura 4-14.: Repetitividad de los resultados encontrados usando como criterio la distancia

80 4 Evaluacion de los algoritmos seleccionados
Figura 4-15.: Repetitividad de los resultados encontrados usando como criterio la distancia
A diferencia de lo que pasa con Momento y con ANT donde el numero maximo de
respuestas iguales es 9 y 1. (Figuras 4-17 y 4-16 )
Figura 4-16.: Repetitividad de los resultados encontrados usando AG Momento
2. Cercanıa de las respuestas El otro punto que se debe considerar es que si las
respuestas no son iguales, las calculadas sean lo suficiente cercanas entre sı.
En la Figura 4-18 se muestra la dispersion de las respuestas de cada metodo, aquı se
observa el alto grado de dispersion que se presenta con ANT y AG - Momento, mientras
con AG-Distancia y AG-Costos el comportamiento es bueno.

4.1 Circuito Primario 81
Figura 4-17.: Repetibilidad de los resultados con AG : Momento
Figura 4-18.: Diagrama de caja: Se muestra la dispersion de las respuestas
4.1.5. Seleccion del algoritmo:
En el primer caso la calidad de la respuestas encontrada con AG con los criterios de Distancia
y Costos son las mejores (833 [m]- 2,185,614[
$ano
]), aunque la respuestas encontradas con
ANT (840 [m] - 2,202,911[
$ano
]) no estan muy lejanas, a diferencia del resultado encontrado
con AG - Momento ( 939 [m] - 2,451,612[
$ano
]), pero en el segundo caso ANT-Distancia la
mejor respuesta encontrada es muy lejana de las encontradas con AG-Distancia o AG-Costo.
En cuanto a la dispersion con AG - Distancia y AG - Costos, la cantidad de veces que se
llega a la misma respuesta y la cercanıa entre respuestas de diferentes valores, se tiene un
comportamiento superior a lo encontrado con ANT y AG - Momento.
En conclusion las metodologıas que tienen mejor comportamiento son AG - Distancia y AG
- Costo.

82 4 Evaluacion de los algoritmos seleccionados
Gracias a la flexibilidad que ofrece los AG se pueden implementar ambas metodologıas en
Pydiordi, incluyendo a AG - Momento, pero es necesario tener presente que optimizar usando
como criterio la distancia puede presentar algunas de las desventajas mostradas en la seccion
3.2, por tal razon se considera que la mejor opcion es optimizar de manera directa el costo
del circuito primario.
4.2. Circuito Secundario
A pesar de que la formulacion del circuito secundario no se vario en terminos generales,
se decide validar los resultados encontrados con Diordi y los de Pydiordi, en dos diferentes
escenarios.
Escenario 1: No se aplica depreciacion al costo de inversion de los transformadores.
Escenario 2: Aplicando la depreciacion del costo de inversion de los transformadores.
Los resultados se encuentran en las tabla 4-15 y en las figuras 4-20, 4-19 y 4-21
Metodo Costo
total del
conductor[$
ano
]
Costo to-
tal de los
transfor-
madores[$
ano
]
Costo
Total del
secundario[$
ano
]
Diordi 922,796 3,181,987 4,104,783
Pydiordi Esce-
nario 1
884,479 2,959,498 3,843,977
Pydiordi Esce-
nario 2
854,273 3,247,830 4,102,103
Tabla 4-15.: Resultados Circuito Secundario Caso 1 y 2
Las soluciones propuestas por ambos programas son semejantes, pero la respuesta
encontrada con Pydiordi- Caso 1 es mas economica debido a los cambios hechos a la
formulacion.
Como era de esperarse aplicar la depreciacion en el valor de reposicion del transforma-
dor que se remplaza incrementa los costos, pero consigue que el modelo se acerque un
poco mas a la realidad.
En los casos anteriores no se cuantifican los ahorros que se pueden tener con una
adecuada sobrecarga de los transformadores.

4.2 Circuito Secundario 83
Figura 4-19.: Circuito secundario segun Diordi
Figura 4-20.: Circuito secundario segun PyDiordi
Los tiempos de ejecucion de Pydiordi son similares a los gastados en Diordi 4, ya que
se esperaban fueran mayores debido a que Python es un lenguaje interpretado.
Las tablas 4-16 y 4-17 muestran un resumen de las mejores respuestas encontradas por cada
una de las metodologıas para los dos casos de estudio.
4Alrededor de 2 minutos

84 4 Evaluacion de los algoritmos seleccionados
Figura 4-21.: Circuito secundario segun PyDiordi con depreciacion
Los resultados encontrados con la metodologıa ANT Colony - Distancia no fueron los espe-
rados, a pesar de que la calidad de la mejor respuesta en el caso 1 es comparable con las de
AG Distancia y AG Costos, en el caso 2 no fue ası.
La dispersion en las respuestas en ambos casos por parte de ANT Colony - Distancia no fue
muy buena.
Teniendo en cuenta los dos anteriores puntos se concluye que lo mas conveniente es seleccionar
Algoritmos geneticos para ser implementado en Pydiordi.
En el circuito secundario se realizo una comparacion con respecto a la respuesta encontrada
con Diordi y los resultados fueron los esperados.
4.3. Aspectos Complementarios:
Los resultados de este modelo deben considerarse como un pre-diseno por lo que es necesario
hacerse un post proceso por parte del disenador en los siguientes aspectos:
Dada la aleatoriedad necesaria en los Algoritmos Geneticos, es posible que en diferentes
corridas del algoritmo, se encuentren diferentes respuestas que deben ser cercanas entre
si y muy cercanas a la optima. Este aspecto puede ser tratado e incluso sacarle beneficio
de la siguiente forma.
• El usuario de la metodologıa debe conocer de manera general la tecnica de Algo-
ritmos Geneticos, para ası entender sus limitaciones y hacer un uso apropiado de
la herramienta.

4.3 Aspectos Complementarios: 85
Metodologıa Distancia [m] Costos[
$ano
]
AG - Distancia 866 2,275,903
AG - Costos 866 2,272,090
AG - Momento 939 2,451,621
ANT - Distancia 850 2,232,042
ANT 0.2 - Distancia 840 2,202,911
ANT 0.5 - Distancia 840 2,202,911
ANT BETA 4 - Distancia 875 2,294,987
AG - Distancia-Costos -
0.95
833 2,185,614
Diordi 833 2,185,614
Tabla 4-16.: Resumen de resultados Caso 1
Metodologıa Distancia [m] Costos[
$ano
]
AG - Distancia 12,840 40,236,149
AG - Costos 13,380 40,343,203
ANT - Distancia 14,640 47,268,876
Tabla 4-17.: Resumen de resultados Caso 2
• Al tener diferentes respuestas con caracterısticas similares, el disenador tiene un
mayor espectro de opciones, que le pueden ayudar a escoger la respuesta que el
considere mejor segun sus criterios.
• Para vencer el inconveniente de escoger una respuesta que no sea buena, el usuario
la puede descartar ejecutando el algoritmo varias veces. La herramienta permite
correr y almacenar las respuestas de cada ejecucion de manera automatica, de
manera similar a como se estudio la repetitividad de las respuestas de los algorit-
mos.
• Una vez que se entiende la metodologıa de AG se puede variar los valores de
ajuste de tal forma que se pueda llegar a una mejor respuesta si llegase a ser
necesario. Al principio del capıtulo se sugieren unos valores con los que el autor
encontro buenas respuestas, pero puede ser un buen ejercicio aumentar el criterio
de convergencia.
La respuesta encontrada debe ser ajustada segun el criterio del disenador, para que
tenga en cuenta los aspectos que el considere necesarios, por ejemplo:
• Aunque el modelo trabaja con valores determinısticos, se puede estudiar la in-
certidumbre de tales parametros, ya que la herramienta permite variacion de los

86 4 Evaluacion de los algoritmos seleccionados
parametros que se consideren necesarios de manera automatica.
• Si la respuesta contiene una conexion que se quiera eliminar, se puede suprimir
la lınea de vista de los nodos que la componen.
• Uniformando los calibres de los conductores donde considere necesario.
• Aumentando el calibre de los conductores para que se puedan tener suplencias
durante una contingencia o previo a la optimizacion reduciendo el valor de maxima
corriente que soporta cada conductor.
No necesariamente el circuito de menor longitud es el circuito de menor costo, ya que
cuando se minimiza la distancia no se tiene en cuenta los siguientes aspectos de manera
directa:
• La componente de confiabilidad de la funcion de costos depende del ındice de
referencia con el que se mida el circuito y de la penalizacion que el ente regulador
fije, estos dos aspectos con el tiempo se pueden hacer cada vez mas exigentes.
• Los costos de la energıa electrica aumentan con el tiempo, por tal razon los costos
de operacion pueden llegar a ser un factor de peso en los costos totales del circuito.

5. Conclusiones y Trabajos Futuros:
5.1. Resumen del estado de los trabajos base de Diordi.
El levantamiento del estado del arte se hizo hasta 1995.
Para el diseno del circuito primario se busca el arbol de mınima expansion, basado en
la relacion distancia - costo.
El diseno del circuito secundario es un diseno robusto fruto de las depuraciones y correc-
ciones de errores encontrados en los tres trabajos base, en este trabajo se encontraron
algunos aspectos a mejorar como:
• Puede presentarse el caso donde un nodo no tenga alimentacion.
• No tiene en cuenta los lımites maximos de temperatura que puede llegar a soportar
el conductor.
• La seleccion del transformador esta sujeta a unos periodos de tiempo fijos.
• El factor de sobrecarga del transformador es fijo.
• No tiene en cuenta la depreciacion del costo del transformador en el momento del
cambio por uno nuevo.
• El tiempo de diseno es fijo.
Los codigos fuentes son difıciles de estudiar debido a que se encuentran en discos
de 5 1/4 o escrito en las tesis. El codigo esta sin tabular y no esta correctamente
documentado.
La interfaz de usuario de Diordi no es muy amigable, ya que el programa esta hecho
para ser ejecutado desde un interprete de comandos, lo cual es incomodo para un
usuario que esta acostumbrado a manejar ventanas.
Los valores calculados de los costos y cantidad de material del circuito primario no son
correctamente calculados.
Para la ejecucion del programa es necesario usar simuladores de DOS, debido a que
presenta problemas de compatibilidad con versiones posteriores de Windows r Vista,
adicionalmente no permite su ejecucion en un sistema operativo diferente a Windows
r.

88 5 Conclusiones y Trabajos Futuros:
Es tedioso digitar los datos, por ejemplo cuando se define las relaciones entre nodos,
es necesario digitar la informacion dos veces.
La depuracion de la informacion es un proceso casi tan largo como la digitacion de
la misma, ya que solo se puede hacer revisando dato por dato o una vez que se ha
terminado el proceso de optimizacion si llegan a una respuesta no coherente.
Para realizar estudios de sensibilidad a la variacion de diferentes parametros, es nece-
sario correr el programa de manera manual cuantas veces se considerara necesario.
Se cuenta con limitaciones en la cantidad de cifras que pueden tener ciertos datos.
Internamente tiene valores por default que no puedan ser modificados por el usuario
(cargabilidad de transformadores, tiempo de planeacion, etc...)
5.2. Valor agregado por la tesis:
Se evaluo el estado del arte en tecnicas de optimizacion aplicadas a redes de distribu-
cion y diferentes tecnicas de optimizacion como: Algoritmos geneticos, Programacion
Dinamica y Ant colony
Se entrega un modelo de optimizacion total (Secundario - Transformador de distribu-
cion y Circuito primario) mejorado y robusto, haciendo especial enfasis en el circuito
primario ya que este presentaba las mayores debilidades.
Se desarrollo una interfaz amigable para el usuario en la entrada y salida de datos de
los circuitos y transformadores.
Se mejoro el modelo de seleccion y remplazo del transformador de distribucion.
Se introdujo el concepto de confiabilidad en el circuito primario.
Pydiodi da la flexibilidad al usuario de poder realizar analisis de sensibilidad al po-
der realizar variacion de los parametros que se consideren necesarios de una manera
automatica, ası evaluar diferentes escenarios y tomar decisiones.
Al hacer el estado de arte se encontraron nuevos enfoques o metodologıas para resolver
el problema de diseno de redes (multiobjetivo, difuso, usando diferentes tecnicas de
optimizacion, etc...), algunas de estas se describen en este trabajo con el fin de ampliar
los descrito en los trabajos base de Diordi.
En los trabajos que dieron como fruto a Diordi se planteaba la hipotesis que al mi-
nimizar la longitud del circuito primario se encontraba el circuito de menores costos
basado en las caracterısticas del mismo, esto fue necesario porque optimizar costos

5.2 Valor agregado por la tesis: 89
directamente era muy costoso computacionalmente. En este trabajo se pudo confirmar
esta hipotesis, ya que las respuestas encontradas minimizando distancia tendrıan cierta
similitud a las encontradas minimizando costos, pero este modelo se queda al evaluar
la confiabilidad, teniendo en mente que cada vez las exigencias en este aspecto seran
mucho mayores.
Los Algoritmos Geneticos es una tecnica meta heurıstica en cuyo proceso de optimiza-
cion esta involucrada la aleatoriedad, que es capaz de encontrar el optimo o una buena
respuesta muy cercana a esta, sujeto a un correcto ajuste de sus factores. Esto significa
que en diferentes corridas el programa no necesariamente llega a la misma respuesta.
En principio puede ser una desventaja pero no necesariamente es ası, ya que luego
de varias corridas el disenador tendra diferentes opciones con caracterısticas similares
entre las que podra escoger la que mas le convenga.
Cuando se evaluaron los criterios de optimizacion se plantearon tres (Distancia , Longi-
tud yMomento ), del tercer criterio se tenıan bastantes expectativas como se mostro en
la seccion 3.5. Al minimizar el momento se esperaba lo siguiente:
• Los circuitos de ejemplo tenıan la misma longitud, por lo tanto los costos de in-
version eran iguales y al no tener costos de operacion significativos, no se tenıa
un criterio determinante para escoger entre uno u otro, pero al calcular el Mo-
mento´de cada uno se observo como los circuitos de menor momento eran los que
tenıan mejores ındices de confiabilidad (SAIDI y SAIFI).
• El momento al ser un producto de la carga por la distancia y sabiendo que las
cargas son constantes, traerıa como consecuencia que el minimizar el momento,
minimizarıa la longitud y con ella los costos.
Pero los resultados mostrados en el capıtulo 4, muestran que la calidad de las respuestas
es la mejor, sumado al hecho de que la repetitividad y la dispersion de las respuestas
tampoco.
Se considera que este criterio debe ser replanteado para poder ver sus verdaderas
cualidades.
Se reactivo el trabajo hecho anteriormente, previo un estudio detallado de las meto-
dologıas propuestas y de una investigacion de las disponibles a la fecha, se realizaron
una serie de ajustes en los puntos que se consideraron mas crıticos.
El modelo del arbol mınimo usado para el circuito primario se reemplazo con un nuevo
modelo que ofrece mayor flexibilidad y permite tener un modelo mas cercano a la
realidad, ya que permite optimizar de manera directa los costos, sumado al hecho
que permite tener en cuenta la confiabilidad del circuito y las restricciones tecnicas
(regulacion y cargabilidad).
90 5 Conclusiones y Trabajos Futuros:
El circuito secundario usado en Diordi, es un modelo robusto como se planteo en
los trabajos base y se confirmo en el presente trabajo. Se le realizaron unos ajustes
buscando que el modelo fuera mas parecido a la realidad y arreglando algunas falencias
que se presentaban en el algoritmo implementado.
Usar un lenguaje interpretado asegura que el codigo fuente siempre estara presente.
Las funciones se documentaron de manera adecuada y debido a que Python obliga a
tabular, el codigo fuente es mucho mas ordenado, facil de leer y entender.
Disminuyo la cantidad de informacion requerida por la herramienta, por ejemplo no es
necesario digitar dos veces la conexion entre dos nodos.
Se mejoro la depuracion de la informacion al tener un esquema grafico con las cone-
xiones que facilita la deteccion de posibles errores.
El manejo de archivos de texto plano en los datos de entrada facilita la modificacion o
depuracion de la informacion.
Se corrigieron los datos de salida del circuito primario ya que eran calculados de manera
erronea.
Se adiciona una salida grafica del circuito, que facilita el analisis de la respuesta en-
contrada.
Python es un lenguaje de programacion multiplataforma que permite su ejecucion en
diferentes sistemas operativos: Windows r, GNU/Linux, MAC OS X y otros.
Con el Python Scripting se pueden correr gran cantidad de casos de manera automatica,
variando todos los parametros que el usuario considere necesario.
Los valores por default pueden ser modificados por el usuario segun su criterio.
5.3. Debilidades o puntos a mejorar.
Debido a que se usa un lenguaje interpretado y a la metodologıa usada en el primario
(Algoritmos geneticos), los tiempos de ejecucion se incrementan con respecto a Diordi,
por ejemplo en el caso de 63 nodos en Diordi se gasta aproximadamente 30 s y Pydiordi
se gasta 5 minutos. El incremento de tiempo en el primario no es una desventaja crıtica
ya que es mas rentable invertir en recursos computacionales si a cambio se consigue
un ahorro en las inversiones en la red de distribucion. Con el circuito secundario los
tiempos de ejecucion son muy similares.

5.4 Evaluacion 91
Usar el criterio de los momentos es una tecnica donde se busca minimizar costos y con-
fiabilidad sin necesidad de usar optimizacion multiobjetivo, pero desafortunadamente
la calidad y la convergencia de las respuestas no fue la esperada.
5.4. Evaluacion del cumplimiento de los objetivos de la
tesis.
Se lograron cumplir todos los objetivos propuestos al principio del proyecto, a continuacion
se discriminan cada una de los compromisos y actividades realizadas.
Objetivo General
Compromiso Realizado
Analizar las diferentes tecnicas
existentes para el diseno optimo
de los circuitos primarios, trans-
formador de distribucion y circui-
tos secundarios de un sistema de
distribucion e implementar una
metodologıa que facilite encon-
trar el diseno optimo al ingeniero,
apoyado en un software.
Se buscaron en diferentes bases de
datos y bibliotecas de Colombia
y del mundo, literatura relaciona-
da con Diseno optimo de redes de
distribucion, se estudiaron las di-
ferentes propuestas allı encontra-
das con el fin de complementar lo
implementado en Diordi, para lle-
gar finalmente a un modelo mu-
cho mas robusto. De igual manera
se entrega una herramienta mu-
cho mas robusta, flexible y senci-
lla de manejar.

92 5 Conclusiones y Trabajos Futuros:
Alcances
Compromiso Realizado
El software debera ser capaz de
soportar el diseno de los circui-
tos primarios, el transformador de
distribucion y los circuitos secun-
darios de un sistema de distribu-
cion de una manera amigable y
eficiente, con el fin de fomentar su
uso.
De manera similar a su predecesor
la herramienta entregada soporta
el diseno de la red primaria, se-
cundaria y sus transformadores.
La entrada y salida de informa-
cion es mas amigable y se facilita
la depuracion de la misma
El software contara con una base
de datos con precios del mercado,
que seran actualizados constante-
mente, para que de esta manera
el modelo se aproxime lo mas po-
sible a la realidad.
La informacion de los materiales
se encuentra en archivos en for-
matos de texto .csv, de facil po-
tabilidad desde y hacia diferentes
herramientas.
Limitaciones
Compromiso Realizado
El numero de nodos maximo es un
valor que es necesario delimitar.
Fijar un numero maximo de no-
dos es una tarea complicada, ya
que este lımite es directamen-
te proporcional al tiempo que el
usuario pueda esperar en que el
algoritmo converja.
Inicialmente este no busca ser
un modelo para hacer planos co-
mo Autocad o de dibujo vecto-
rial como Flash, sino un progra-
ma de optimizacion, por lo tan-
to como primera alternativa se
buscara poder importar imagenes
que contengan los planos para po-
der hacer el diseno respectivo, si
esto no se logra de manera satis-
factoria, entonces el programa de-
bera ser capaz de generar sus pro-
pios diagramas.
Basado en una serie de datos, la
herramienta es capaz de generar
sus propios diagramas.

5.5 Posibles Trabajos Futuros : 93
Metodologıa
Compromiso Realizado
Para la realizacion de la propues-
ta se ha consultado diferente do-
cumentacion relacionada con el
diseno, por lo tanto la prime-
ra parte del documento final es-
tara enfocado en conocer el esta-
do del arte del tema.
En este documento se encuentra
el estado del arte.
Una vez teniendo un espectro
adecuado de alternativas, realizar
un estudio de cada una de ellas
para escoger la mas apropiada e
implementarla en el software.
Del espectro de alternativas en-
contradas, se realizo un filtro ba-
sado en los criterios que se expli-
can en este documento y se con-
cluyo que la metodologıa de cos-
tos es la mas apropiada.
Implementar el software con la
metodologıa escogida.
El software se llama Pydiordi
5.5. Posibles Trabajos Futuros :
Continuar la busqueda de nuevas propuestas que sigan enriqueciendo la metodologıa,
para que ası sus modelos se acerquen cada vez mas a la realidad y sus respuestas sean
mas efectivas.
Que la metodologıa permita asistir la repotenciacion o expansion de un sistema exis-
tente.
Evaluar el modelamiento de la confiabilidad en la seleccion de un circuito secundario.
Una de las desventajas que presenta la nueva metodologıa es el tiempo que consume
para encontrar la respuesta (un comportamiento normal debido al uso de tecnicas
metaheurısticas), el cual se incrementa con la cantidad de nodos que tenga el problema,
el numero de generaciones o los valores de ajuste ), pero afortunadamente este problema
se puede mitigar.
El algoritmo actual se implemento de una manera secuencial, lo que significa que no
se corren procesos en paralelo ( no se pueden crear mas de un individuo a la vez), pero
en la practica si se crearan dos, tres o mas individuos de manera simultanea, el tiempo
de optimizacion se reducirıa.
Se propone un esquema cliente-servidor que funciona de la siguiente forma (Figura
5-1):

94 5 Conclusiones y Trabajos Futuros:
Figura 5-1.: Esquema propuesto de red de optimizacion
El cliente contiene una interfaz que se conecta con el motor de optimizacion instalado
en un servidor, el cual a su vez en el momento de recibir la peticion de optimizacion
reparte el trabajo en diferentes Workers, que se encargan de realizar pequenas tareas
en paralelo.
Esta metodologıa no se implemento ya que se sale del alcance del presente trabajo.

A. Variables
λi : Rata promedio de falla del segmento i.[Fallasano
]
a: Coeficiente del factor de carga ( Se puede usar a = 0.17).
b: Coeficiente del factor de carga ( Se puede usar b = 0.83).
CC(N): Factor serie anual equivalente para un periodo N.
CCl(i): Incentivo o penalizacion por confiabilidad.
CIl(i, ki): Costos de inversion de las lineas de distribucion.
CIt(i): Costos de inversion de los transformadores.
COl(i, ki): Costos de operacion de las lineas de distribucion.
COt(i): Costos de operacion de los transformadores.
cosθ: Factor de potencia.
CR0 : Costo de racionamiento[
$kWh
]
DI: Cantidad de anos que dura instalado el transformador.
F lui: Flujo de potencia a traves del segmento i [kVA].
F lus : Carga del sistema .
F luT,i : Flujo de potencia a traves del transformador i
FT : Factor totalizador.
FTt,i : Factor de totalizador del transformador i.
IAD : Indice anual de discontinuidad [p.u].
IRAD : Indice de referencia de discontinuidad [p.u].
ki: El conductor seleccionador para el tramo i.
li: Longitud del tramo i [m].

96 A Variables
M : La cantidad de variables de estado usada en el algoritmo de seleccion de conductor.
N : Tiempo de planeacion.
No: Variable binaria que indica el uso o no del neutro.
NT : La cantidad de transformadores que componen el circuito.
NAD : Nivel anual de discontinuidad [kWh].
NDTk : Nivel de discontinuidad del transformador k.
NFA : Numero de fases del sistema.
Ns: La cantidad de segmentos que componen el circuito.
Pik: Perdidas en el tramo i al usar el conductor k .
Pk : Perdidas en carga a potencia nominal del transformador tipo k.
Pn,i : Potencia nominal del transformador i .
PPC: Perdidas en carga.
Pre(k′) : Precio del neutro $m.
Pre(k): Precio del conductor $m.
PTk : Precio del transformador k.
r: Tasa de crecimiento de la carga.
raaot : Tiempo medio de afectacion de la la linea [horas].
Rik: Resistencia del tramo ı por el conductor k [Ω] .
rat: Tasa de retorno.
V Base : Tension base del circuito en [kV].
V BD : Variable binaria de depreciacion.
V D: La vida nominal del transformador [anos].
V DMax: Maxima caıda de tension permitida en el circuito primario.
V T : Ventas de energıa anuales [kWh].
Xik: Reactancia del tramo ı por el conductor k [Ω].

B. Manual de usuario:
B.1. Requerimientos:
Se ha probado con los sistemas operativos:
Sistema Operativo:
• GNU/Linux Debian 8.0 (Jessy ).
• Windows 7 r ( 32 y 64 bits). 1
• Windows 8 r.
Python Compatible con las versiones 3.x, se ha probado con Python 3.2 y 3.3. 2
Adicionales: ??
• Matplotlib .
• Numpy .
• Pyhton-dateutil.
• Six .
• Pyparsing.
• Wine 3
El instalador SetupPydiori.exe cuenta con las versiones binarias de estos requerimientos, los
cuales se puede distribuir de acuerdo las siguientes licencias.
PSF : Python, Matplolib
Numpy License : Numpy
Simplified BSD license Pyhton-dateutil.
MIT License Six, PyParsing
Los binarios de algunas de estas herramientas se pueden descargar desde :
http://www.lfd.uci.edu/˜gohlke/pythonlibs
1 Numpy no tiene instaladores para 64 bits2 Ultima version en el momento de escribir este documento3Debido a que el instalador es un ejecutable para windows es necesario cuando se use en GNU/Linux

98 B Manual de usuario:
B.2. Instalacion:
B.2.1. Instalacion Windows r:
Al ejecutar el archivo setupPydiordi.exe se abrira una pantalla como la mostrada en B-1.
Figura B-1.: Instalador Pydiordi
Los pasos a seguir son:
1. Oprima el boton Siguiente para escoger la ruta donde ejecutara el programa.
2. De click en Instalar.
3. El anterior paso descomprime una carpeta que contiene el codigo fuente del programa,
se sugiere ponerla lo mas cercano posible a la raız del disco duro C : \Pydiordi o
D : \Pydiordi y que la ruta no contenga caracteres como espacios o n.
4. Dentro de esta carpeta se encuentra otra llamada dependencias donde se encuentra los
pre requisitos necesarios, instale primero Python y posteriormente los demas.
5. Si cuando ejecuta el archivo PythonC.exe tiene problemas es necesario instalar la bi-
blioteca dotNetFx45 Full setup, que tambien se encuentra dentro de la carpeta de-
pendencias
B.2.2. GNU/Linux (Debian)
Normalmente desde Linux se puede usar un gestor de paquetes (Aptitude o Synaptics) para
instalar los requerimientos, por ejemplo desde Debian se puede usar el siguiente comando:
apt-get install python3-matplotlib
Debido a que el instalador de Pydiordi viene comprimido en un .exe, se puede usar Wine
para descomprimir las carpetas necesarias.

B.3 Estructura: 99
B.3. Estructura:
La estructura de Pydiordi es la mostrada en la figura B-2:
Figura B-2.: Estructura Pydiordi
B.3.1. Ejecutables:
El programa se compone de 4 programas ejecutables.
PhytonC.exe: GUI para facilitar el uso de la herramienta desde Windows r, esta
interfaz centraliza de los tres programas principales.
Necesita el archivo Configure.csv para guardar las rutas de configuracion de Python,
Pydiordi, ası como sus archivos de entrada y salida.
generarEntrada.py Buscando reducir los tiempos al introducir la informacion y bus-
cando mejorar la depuracion de la misma con respecto a Diordi, se introdujeron los
siguientes aspectos:
1. Se reduce la cantidad de informacion que tiene que ser digitada por un usuario,
por ejemplo desde Diordi para introducir las conexiones de los nodos mostrados
en la figura B-3 , es necesario introducir la misma informacion dos veces (Figura
B-4 y B-5).
2. Para verificar que la informacion es correcta en DIORDI es necesario recorrer
nodo por nodo (Ver Figura B-4 y B-5) y corregirla pantalla por pantalla.
En Pydiordi se definen los tramos mas no los nodos, lo cual reduce la cantidad de
informacion que tiene que ser digitada, adicionalmente se genera una salida (Figura
B-6) donde se puede visualizar el circuito.
Los archivos de entrada son:

100 B Manual de usuario:
0 1 0 2 0 3 0 4 0 5 0 6 0 7 0
1 0 0
1 1 0
1 2 0
1 3 0
1 4 0
2 6
3 0
4 84 95 05 1
Figura B-3.: Posibles conexiones
Figura B-4.: Introduciendo la informacion del nodo 52
1. [ARCHIVOARCOS].csv:
Se define cada uno de los arcos a partir de la posicion X y Y de un nodo con
respecto a otro. En la primera lınea se define un arco entre los nodos 49 y 48, con
una distancia de 48 unidades en el eje X.
Por ejemplo para definir los arcos que definen la figura B-7, se empieza definiendo
el arco que une la subestacion y su nodo mas cercano, en este caso los nodos 6 y
4 con el siguiente vector (0,-2), posteriormente el arco que une los nodos 3 con 4
y ası hasta haber definido todos los posibles arcos.
Pto A;Pto B;Distancia X;Distancia Y
6;4;0;-2
4;3;-2.5;0
4;5;2.5;0
3;0;0;-2
4;1;0;-2

B.3 Estructura: 101
Figura B-5.: Introduciendo la informacion del nodo 51
− 5 0 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0− 5 0
0
5 0
1 0 0
1 5 0
2 0 0
0 1 2 3 4 5 6 7 8 9
1 0
1 11 21 31 41 51 61 71 81 92 02 1
2 2
2 3
2 4
2 5
2 6
2 7
2 82 9
3 0
3 1 3 2 3 3 3 4 3 5 3 6 3 7
3 8
3 9
4 0
4 14 24 34 44 54 64 74 84 95 05 15 2
5 3
5 4 5 5 5 6 5 7 5 8 5 9
6 0
6 1
6 2
Figura B-6.: Salida del programa generarEntrada.py
5;2;0;-2
0;1;2.5;0
1;2;2.5;0
2. [ARCHIVOCARGAS].csv:
A cada uno de los nodos se les especifica la cantidad de usuarios (para aplicar el
factor de diversidad) y su carga.
1;15;5
2;18;6
3;18;6
4;18;6
Las salidas de este programa son:
1. conexiones/conexionesSecundario.csv:

102 B Manual de usuario:
0 1 2
3 4 5
6
Figura B-7.: Ejemplo de definicion de arcos
Contiene la informacion de los nodos y sus conexiones a sus nodos vecinos, con
su carga.
Nodo;C1;Distancia;C1;Distancia;C1;Distancia;C1;Distancia;Carga;Usuarios
0;1;26.0;22;19.0;-1;0;-1;0;3.0;1
1;0;26.0;2;26.0;-1;0;-1;0;12.0;4
2;1;26.0;3;26.0;-1;0;-1;0;12.0;4
.
.
12;11;18.0;13;19.0;-1;0;-1;0;6.0;40.84
2. inputs/coordenadasX.csv y inputs/coordenadasY.csv : Se guardan las
coordenadas de cada uno de los nodos con respecto al nodo de referencia.
3. Esquema del Circuito: Se muestra un esquema grafico con todas las conexiones
posibles entre nodos Figura B-6 .
Desde un interprete de comandos (Windows r) o una terminal (Linux) se puede
ejecutar de la siguiente manera.
python generarEntrada.py -i caso1Desde0.csv -o conexionesSecundario.csv
-c cargasCaso1.csv
secundario.py: Programa encargado de buscar el circuito secundario.
Los archivos de entrada son:
1. [Conexiones].csv: Se puede usar el archivo generado por GenerarEntrada.py.

B.3 Estructura: 103
2. Entrada.py Ver B.3.8
Las salidas de este programa son:
1. alPrimario.csv: Contiene la misma informacion del archivo de entrada de cone-
xiones, con la diferencia que las cargas en los nodos son las de los transformadores.
Nodo;C1;Distancia;C1;Distancia;C1;Distancia;C1;Distancia;Carga;0
0;1;26.0;22;19.0;-1;0;-1;0;3.0;0
1;0;26.0;2;26.0;-1;0;-1;0;12.0;0
2;1;26.0;3;26.0;-1;0;-1;0;12.0;0
.
.
12;11;18.0;13;19.0;-1;0;-1;0;6.0;40.84
2. CostoSecundario.csv: Costo total de los circuitos que componen la red secun-
daria
3. Obligatorios.csv: Contiene la lista de los nodos donde se ubican los transforma-
dores, el nodo que representa la S/E y el nodo que se conecta a ella.
4. Respuesta*.csv: Se muestra la informacion de cada uno de los circuitos que
componen al circuito primario. La informacion allı contenida es:
• Costo de inversion
• Costo de operacion
• Costo total de circuito
• Longitud del circuito
• Cantidad de usuarios
• Costo x Usuario
• Carga diversificada
• Transformador: Nodo al que esta conectado, la potencia, el ano de instalacion,
el costo de inversion, operacion y total
• Para cada tramo que compone el circuito : Los nodos , el flujo de potencia,
el conductor , el ∆ V, la regulacion acumulada desde la cola del circuito, los
costos de operacion y de inversion.
5. Circuito Uno de los beneficios con los que cuenta Pydiordi es que muestra una
salida grafica del circuito Figura B-8.
Desde un interprete de comandos (Windows r) o una terminal (Linux) se puede
ejecutar de la siguiente manera.
python secundario.py -i Conexiones/conexionesSecundario.csv -c 2

104 B Manual de usuario:
− 5 0 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0− 5 0
0
5 0
1 0 0
1 5 0
2 0 0
0 1 2 3 4 5 6 7 8 9
1 0
1 11 21 31 41 51 61 71 81 92 02 1
2 2
2 3
2 4
2 5
2 6
2 7
2 82 9
3 0
3 1 3 2 3 3 3 4 3 5 3 6 3 7
3 8
3 9
4 0
4 14 24 34 44 54 64 74 84 95 05 15 2
5 3
5 4 5 5 5 6 5 7 5 8 5 9
6 0
6 1
6 2
Figura B-8.: Circuito secundario de salida
primario.py:
Programa encargado de buscar el circuito primario basado en la ubicacion de los trans-
formadores y distribucion de carga hallada por secundario.py.
Los archivos de entrada son:
1. alPrimario.csv: El archivo generado por Secundario.py.
2. Entrada.py Ver B.3.8
Las salidas de este programa son:
1. Respuesta.csv:
Contiene el individuo con mejores caracterısticas encontrado generado por el AG,
la informacion allı contenida es:
• Costo de confiabilidad
• Costo de inversion
• Costo de operacion
• Costo Total
• Distancia Recorrida
• De cada tramo que compone el circuito : Los nodos , el flujo de potencia, el
conductor , el ∆ V, la regulacion acumulada desde la cola del circuito, los
costos de operacion y de inversion.
2. resultado*.csv y ruta*.csv: Muestra cada uno de los individuos que componen
la poblacion en cada una de las generaciones.

B.3 Estructura: 105
− 5 0 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0− 5 0
0
5 0
1 0 0
1 5 0
2 0 0
0 1 2 3 4 5 6 7 8 9
1 0
1 11 21 31 41 51 61 71 81 92 02 1
2 2
2 3
2 4
2 5
2 6
2 7
2 82 9
3 0
3 1 3 2 3 3 3 4 3 5 3 6 3 7
3 8
3 9
4 0
4 14 24 34 44 54 64 74 84 95 05 15 2
5 3
5 4 5 5 5 6 5 7 5 8 5 9
6 0
6 1
6 2
Figura B-9.: Circuito primario de salida
3. Grafica del Circuito De manera similar con secundario.py muestra el circuito
primario final Figura B-9.
Desde un interprete de comandos (Windows r) o una terminal (Linux) se puede
ejecutar de la siguiente manera.
python primario.py -i salidaSecundario/alPrimario.csv -c 1
B.3.2. Inputs:
Compuesto por los archivos de contienen informacion de los transformadores, conductores,
factores de diversidad y coordenadas de los nodos, estos archivos estan en formato CSV, de
tal forma pueden ser editados desde un editor de textos como NotePad ++ o desde una
hoja de calculo como OpenOffice o Microsoft Excel 4.
inputs/coordenadasX.csv y inputs/coordenadasY.csv .
factorDiversidad.csv : Se escribe el factor de diversidad.
Numero de Usuarios;Factor de Diversidad
1;1
2;1.05
3;1.1
4;1.15
4Microsoft Excel es una marca registrada de Microsoft

106 B Manual de usuario:
.
.
49;2.0637
50;2.0682
tiposTransformadores.csv: Descripcion de los transformadores disponibles.
ID;Potencia(kVA);P0 kW;Pk kW;Precio (Miles Pesos)
1;15;0.11;0.38;3000
2;30;0.18;0.63;4600
.
.
tiposConductores.csv: Descripcion de los conductores disponibles.
ID;TIPO;PRECIO C xm;CALIBRE;RESISTENCIA Ohm / km;...
REACTAN Ohm/km;CIR;Precio N;CAL N;Imax
1;ACSR;1510;4/0;0.361;0.4482;1;975;2/0;340
2;ACSR;975;2/0;0.5582;0.4855;1;622;1;270
.
.
B.3.3. Conexiones:
Se encuentra la salida generada por el algoritmo generarEntrada.py .
B.3.4. Log:
Se muestran los errores generados durante la ejecucion de los programas.
B.3.5. PydiordiLib:
Cada una de las bibliotecas usadas por los algoritmos.
B.3.6. Requerimientos:
Los requerimientos para ser instalados en Windows r.
B.3.7. SalidaPrimario y SalidaSecundario:
Contiene los resultados generados por primario.py y secundario.py

B.4 Ejecucion desde Windows r: 107
B.3.8. entrada.py:
Se encuentran las principales caracterısticas del sistema de distribucion y datos necesarios
para correr los programas del primario y del secundario.
Criterios del AG: Criterio de optimizacion (distancia, costo) y de convergencia del
AG, tamano de la poblacion, maximo numero de generaciones, tasa de cruce y proba-
bilidad de mutacion.
Caracterısticas de la red de distribucion: Potencia base, Tension de lınea del
circuito primario y secundario, nodo considerado como S/E y su nodo aledano, numero
de fases del sistema, Factor de potencia, Factor de Carga, Costo de potencia, Costo
de la energıa, Costo de racionamiento, Coeficientes del factor de perdidas, Tasa de
retorno y de crecimiento de la carga, Regulacion maxima, Vida util del proyecto y de
los transformadores y si se aplica depreciacion en su precio, Indice de confiabilidad de
referencia, Tasa de fallas y de reparacion
B.4. Ejecucion desde Windows r:
Desde la carpeta de instalacion ejecute el archivo PyDiordi.exe Ver Figura B-10.
Figura B-10.: Pantalla de Inicio
Si es la primera vez que se ejecuta el programa es necesario configurarlo, abra el menu y
escoja la opcion Configuracion. Figura B-11.
Figura B-11.: Pantalla de Configuracion
Desde allı se configura:

108 B Manual de usuario:
Python Path: La ruta del archivo ejecutable de Python.
Pydiordi Path: La ruta donde se instalo PyDiordi.
Nodo Referencia: El numero del nodo que sera usado como referencia.
Los archivos de entrada para Python C son:
Cargar Arcos: inputs/entradaArcos.csv
Secundario: conexiones/conexionesSecundario.csv
Primario: salidaSecundario/alPrimario.csv
En el menu desplegable de la pantalla principal se ofrecen las siguientes opciones de ejecucion:
Cargar Arcos: Ejecuta el programa generarEntrada.py
Optimizar Secundario: Ejecuta el programa secundario.py.
Optimizar Primario: Ejecuta el programa primario.py
Optimizacion Total: Ejecuta el programa secundario.py y una vez terminado secunda-
rio.py
Bibliografıa
[Adams, 1974] Adams, R.N.; Laughton, M. (1974). Optimal planning of power networks
using mixed-integer programming. part 1: Static and time-phased network synthesis. Elec-
trical Engineers, Proceedings of the Institution of, 121:1974.
[Alcazar, 1995] Alcazar, J ; Rincon, F. (1995). Diseno optimo de redes de distribucion parte
III. PhD thesis, Universdad Nacional de Colombia.
[Aoki et al., 1990] Aoki, K., Satoh, K. N. T., Kitagawa, M., and Yamanaka., K. (1990). New
approximate optimization method for distribution system planning. Power Systems, IEEE
Transactions on, 5:Power Systems, IEEE Transactions on.
[Araujo, 2009] Araujo, L. . C. C. (2009). Algoritmos Evolutivos: Un enfoque practico. Al-
faomega.
[Bernal, 1998] Bernal, J. (1998). Aplicacion de algoritmos Geneticos al diseno optimo de
sistemas de distribucion de energıa electrica. PhD thesis, Universidad de Zaragoza.
[Boulaxis, 2002] Boulaxis, N.G.; Papadopoulos, M. (2002). Optimal feeder routing in distri-
bution system planning using dynamic programming technique and gis facilities. Power
Delivery, IEEE Transactions on, 17:242–247.
[Carvalho et al., 1997] Carvalho, P., Ferreira, L., Lobo, F., and Barruncho, L. (1997). Car-
valho, p.m.s.; ferreira, l.a.f.m.; lobo, f.g.; barruncho, l.m.f. Power Industry Computer
Applications., 1997. 20th International Conference on, pages 11–16.
[Codensa, 2009a] Codensa (2009a). Niveles de tension para distribucion. Technical report,
Codensa.
[Codensa, 2009b] Codensa (2009b). Norma codensa 7.1 generalidades. Technical report,
Codensa.
[Codensa, 2014] Codensa (2014). Niveles de tension de conexion de cargas de clientes. Tech-
nical report, Codensa.
[Cossi et al., 2005] Cossi, A., Romero, R., and Mantovani, J. (2005). Planning of secondary
distribution circuits through evolutionary algorithms. Power Delivery, IEEE Transactions
on, 20:205– 213,.

110 Bibliografıa
[Crawford and Holt, 1975] Crawford, D. and Holt, S. J. (1975). A mathematical optimiza-
tion technique for locating and sizing distribution substations, and deriving their optimal
service areas. Power Apparatus and Systems, IEEE Transactions on, 94:230–235.
[CREG, 2010] CREG (2010). Suministro de electricidad. In Suministro de electricidad.
[Dakin, 1964] Dakin, R. (1964). A mixed-integer programming algorithm. Technical report,
University of Sydney.
[Domınguez, 2000] Domınguez (2000). Modelos para la planificacion de redes de distribucion
de energıa electrica asistida por computador aplicando tecnicas matematicas Fuzzy. PhD
thesis, Universidad Zaragoza.
[Dorigo, 2004] Dorigo, M; Stutzle, T. (2004). Ant Colony Optimization. The MIT Press.
[Echeverri et al., 2005] Echeverri, M., Gallego, R., and HIncapie, R. (2005). Planeamiento
de sistemas de distribucion de energıa electrica usando branch and bound. Ingenieria,
Universidad Distrital Francisco Jose de Caldas, 10:44–50.
[Frank, 1956] Frank, M. W. (1956). An algorithm for quadratic programming. Naval Re-
search Logistics Quarterly, 3:95–110.
[Gallego et al., 2008] Gallego, R., Escobar, A., and E., T. (2008). Tecnicas Metaheuristicas
de optimizacion. Universidad Tecnologica de Pereira.
[Gonen, 1981] Gonen, T.; Foote, B. (1981). Distribution-system planning using mixed-
integer programming. Generation, Transmission and Distribution, IEE Proceedings C,
128:70–79.
[Gonen, 1986] Gonen, T.; Ramirez-Rosado, I. (1986). Review of distribution system plan-
ning models: a model for optimal multistage planning. Generation, Transmission and
Distribution, IEE Proceedings C, 7:397–408.
[Hindi, 1977] Hindi, K.S.; Brameller, A. (1977). Design of low-voltage distribution networks:
a mathematical programming method. Electrical Engineers, Proceedings of the Institution
of, 124:54–58.
[Hsu, 1990] Hsu, Y.-Y.; Chen, J.-L. (1990). Distribution planning using a knowledge-based
expert system. Power Delivery, IEEE Transactions on, 5:1514–1519.
[ICONTEC, 1997] ICONTEC (1997). Ntc 2135 (1997-11-26) segunda actualizacion. electro-
tecnia. transformadores. guıa para formulas de evaluacion de perdidas.
[Karush, 1939] Karush, W. (1939). Minima of Functions of Several Variables with Inequa-
lities as Side Conditions. PhD thesis, University of Chicago.

Bibliografıa 111
[Khaitan and Gupta, 2012] Khaitan, S. K. and Gupta, A. (2012). High Performance Com-
puting in Power and Energy Systems. Springer.
[Knight, 1960] Knight, U. (1960). The logical design of electrical networks using linear
programming methods. Proceedings of the IEE - Part A: Power Engineering, 107:306–
314.
[Marroquin, 2008] Marroquin, O. (2008). Planeamiento de redes secundarias de distribu-
cion usando un algoritmo de optimizacion basado en colonia de hormigas. PhD thesis,
Universidad Tecnologica de Pereira.
[Masud, 1974] Masud, E. (1974). An interactive procedure for sizing and timing distribu-
tion substations using optimization techniques. Power Apparatus and Systems, IEEE
Transactions on, PAS-93:1281–1286.
[Mayorga H, 1991] Mayorga H, Rodrıguez J, S. L. (1991). Diseno optimo de distribucion II
Parte. PhD thesis, Universidad Nacional de Colombia.
[Mendoza, 2010] Mendoza, F. (2010). Diseno multiobjectivo y multietapa de sistemas de
distribucion de energıa electrica aplicando algoritmos evolutivos. PhD thesis, Universidad
de Zaragoza.
[Milano, 2013] Milano, F. (2013). A python-based software tool for power system analysis.
IEEE PES General Meeting, pages 21–25.
[Miranda et al., 1994] Miranda, V., Ranito, J., and Proenca, L. (1994). Genetic algorithms
in optimal multistage distribution network planning. Power Systems, IEEE Transactions
on, 9:1927–1933.
[Momoh, 2001] Momoh, J. (2001). Electric Power System Applications of Optimization.
Marcel Dekker, Inc.
[Mora, 2001] Mora, H. (2001). Optimizacion no lineal y dinamica. Universidad Nacional de
Colombia.
[Nara et al., 1991] Nara, K., Satoh, T., Aoki, K., and Kitagawa, M. (1991). Multi-year
expansion planning for distribution systems. Power Systems, IEEE Transactions on,
6:952–958.
[Nara et al., 1992] Nara, K., Satoh, T., Kuwabara, H., Aoki, K., Kitagawa, M., and Ishihara,
T. (1992). Distribution systems expansion planning by multi-stage branch exchange.
Power Systems, IEEE Transactions on, 7:208–214.

112 Bibliografıa
[Navarro, 2007] Navarro, A. (2007). Planificacion de redes de distribucion: Aproximacion
vıa clustering, diagramas de voronoi y bisqueda tabu. PhD thesis, Universidad Catolica de
Chile.
[Nickel, 1981] Nickel, D.L ; Braunstein, H. (1981). Distribution transformer loss evaluation.
IEEE Transactions on Power Apparatus and Systems, Vol 2:788–797.
[Perez et al., 1990] Perez, A., Infante, . O., Llanos, H., and H, N. (1990). Bases para la
formulacion de un algoritmo de optimizacion para diseno de sistemas de distribucion.
PhD thesis, Universdad Nacional de Colombia.
[Ponnavaikko et al., 1987] Ponnavaikko, N., Rao, K. S. P., and Venkata, S. S. (1987). Dis-
tribution system planning through a quadratic mixed integer programming approach,.
Power Delivery, IEEE Transactions on, 2:1157–1163.
[Ramirez, 2004] Ramirez, S. (2004). Redes de distribucion de energıa. Universidad Nacional
de Colombia.
[Ramirez-Rosado et al., 1999] Ramirez-Rosado, I., Dominguez-Navarro, J., and Yusta-Loyo,
J. (1999). A new model for optimal electricity distribution planning based on fuzzy set
techniques. Power Engineering Society Summer Meeting, 2:1048–1054.
[Ramirez-Rosado, 2006] Ramirez-Rosado, I. J. A. D.-N. (2006). New multiobjective tabu
search algorithm for fuzzy optimal planning of power distribution systems. Power Systems,
IEEE Transactions on,, 21:224–233.
[Ramirez-Rosado, 2001] Ramirez-Rosado, I.J.; Bernal-Agustin, J. (2001). Reliability and
costs optimization for distribution networks expansion using an evolutionary algorithm.
Power Systems, IEEE Transactions on, 16:111–118.
[Ramirez-Rosado, 2004] Ramirez-Rosado, I.J.; Dominguez-Navarro, J. (2004). Possibilistic
model based on fuzzy sets for the multiobjective optimal planning of electric power dis-
tribution networks. Power Systems, IEEE Transactions on , 19:1801–1810.
[Ripoll, 2004] Ripoll, V. (2004). Optimizacion de redes de distribucion de energıa electrica
con un modelo de optimizacion multiobjetivo. PhD thesis, Universidad de los Andes.
[Robert, 1995] Robert, S. (1995). Algoritmos en C++. Ediciones Dıaz de Santo.
[Sun et al., 1982] Sun, D., Farris, D., Cote, P., Shoults, R., and Chen, M. (1982). Optimal
distribution substation and primary feeder planning via the fixed charge network formu-
lation. Power Apparatus and Systems, IEEE Transactions on, 3:602–609.
[Tram, 1988] Tram, H.N.; Wall, D. (1988). Optimal conductor selection in planning radial
distribution systems. Power Systems, IEEE Transactions on, 3:200–206.

Bibliografıa 113
[Wall et al., 1979] Wall, D., Thompson, G., and Northcote-Green., J. (1979). An optimi-
zation model for planning radial distribution networks. Power Apparatus and Systems,
IEEE Transactions on, 3:1061–1068.
[Willis, 2004] Willis, H. (2004). Power Distribution Planning Reference Book. CRC Press.
[Willis et al., 1996] Willis, H., Tram, H., Engel, M., and Finley, L. (1996). Selecting and
applying distribution optimization methods,. Computer Applications in Power, IEEE,
9:12–17.
[Youssef et al., 1985] Youssef, H. K., Hackam, R., and Abu-El-Magd., M. A. (1985). Novel
optimization model for long range distribution planning,. Power Engineering Review,
IEEE, PER-5:43.
[Youssef, 1988] Youssef, H.K.; Hackam, R. (1988). Dynamic solution of distribution planning
in intermediate time range. Power Delivery, IEEE Transactions on, 3:341–348.







