diseÑo de un sistema de captura y anÁlisis de …
TRANSCRIPT
1 de 139
Universidad Acción Pro Educación y Cultura
Decanato de Ingeniería e Informática
Escuela de Ingeniería
Trabajo de Grado Para Optar por el Título de:
Ingeniero Electrónico en Comunicaciones
DISEÑO DE UN SISTEMA DE CAPTURA Y ANÁLISIS
DE IMÁGENES SATELITALES EN EL LABORATORIO
DE COMUNICACIONES DE UNAPEC
Sustentantes:
Ángel Iván Gerónimo
Michelle Fernández
Sherman Rosario
2013-2826
2012-0792
2013-2925
Asesor:
Prof. Porfirio Sánchez
Santo Domingo, D.N.
2017

2 de 139
Los conceptos expuestos en esta investigación son de la exclusiva responsabilidad de sus
autores.
3 de 139
RESUMEN
Este trabajo de grado se basa en el diseño de un sistema de recepción de imágenes
satelitales. Incluye una investigación sobre las técnicas telemedición satelital y sus
características. Partiendo de esto se implementó mecanismos para obtener dichas imágenes
a partir de la señal emitida durante el paso de los satélites NOAA sobre el espacio aéreo de
la isla de Santo Domingo. Para esto fue necesario aplicar distintos programas de software
así como adaptar hardware y construir dispositivos físicos como antenas que trabajen en
conjunto, operando a la frecuencia de transmisión de dichos satélites.
Durante esta investigación se encontró que existen diversas plataformas en línea para
la adquisición de imágenes satelitales de alta resolución. Sin embargo, la cantidad de tiempo
en el que actualizan las imágenes y los precios a los que las comercializan podría significar
un grave inconveniente.
Junto con esto, se expone la metodología de diseño de distintas antenas, así como la
práctica de construcción de estas antenas de un sistema de posicionamiento de antenas para
el seguimiento en tiempo real de satélites, compuesto por motores paso a paso de bajo costo
y microcontroladores Arduino.
Además se encontró que el campus de ingeniería Colegio APEC Fernando Arturo de
Meriño, CAFAM, es un entorno poco amigable para las comunicaciones satelitales en la
banda de VHF debido a las interferencias radioeléctricas del ambiente.

4 de 139
DEDICATORIA
- Ángel Iván Gerónimo
A Dios, por haberme permitido llegar hasta esta etapa de mi vida, en la que concluyo
mis estudios universitarios de manera exitosa. A mi Padre y a mi Madre, quienes a través de
su incansable ayuda en todo lo imaginable, han hecho posible que pueda convertirme en un
profesional.
- Michell Fernández
A mi madre Amilka Rodríguez, quien además de mi madre, ha sido mi padre, mi
secretaria, mi ayudante y mi jefa, pero sobre todo mi modelo a seguir y mi mejor amiga, a
quien le he podido contar mis problemas y siempre ha puesto su hombro para que yo pueda
llorar en mis momentos más difíciles. A mi padre Emerito Fernández por enseñarme el valor
de crecer como un hombre y darme las herramientas y conocimientos con los cuales me
enfrento a la vida. A Frank Caminero porque siempre he podido contar con él para brindarme
su apoyo y su experiencia, ayudándome a salir a flote cuando lo necesité. A mi abuela, con
tanto que la he molestado me sigue queriendo. A mis amigos porque nunca me han dejado
de querer a pesar de las adversidades que hemos enfrentado.
- Sherman Rosario
A mi madre Juana y mi padre Domingo por haberme apoyado en todo momento, por
darme los empujones que he necesitado para seguir creciendo y por siempre aceptarme con
su amor. A mi hermana Mariel por ser siempre un gran ejemplo de ser humano y por
ayudarme a trazar el camino por el que he caminado. A mis familiares y amigos, por ser
siempre tan fieles a mí a pesar de que he sido muy distante en momentos que he necesitado
enfocar mi mente en el trabajo o los estudios.
5 de 139
AGRADECIMIENTOS
- Ángel Iván Gerónimo
Mis agradecimientos a nuestro asesor de Tesis, Porfirio Sánchez, por su dedicación y
paciencia en los momentos más difíciles y por haber servido de guía durante estos últimos
meses. Agradezco a los familiares y amigos que se preocuparon por brindar su apoyo durante
el desarrollo del trabajo de grado. Además, agradezco al Ministerio de Educación Superior,
Ciencia y Tecnología, MESCyT, por su sustento económico durante el transcurso de mi
carrera.
- Michelle Fernández
Agradezco a Dios, por permitirme terminar esta etapa de mi vida. Gracias a nuestro
asesor Porfirio Sánchez por siempre ir a buscarme a la biblioteca para ayudarme a realizar
mi aporte a este proyecto. Gracias a mis compañeros de trabajo por siempre “taparme” y
cubrirme cuando necesité salir a la universidad. A mis familiares por darme la motivación
que necesité para amanecer trabajando en esta investigación. A mis amigos y compañeros de
tesis, porque después de esta larga trayectoria y todo el empeño que hemos puesto, ya
podemos decir que lo logramos.
- Sherman Rosario
Agradezco a mis maestros Porfirio Sánchez, Domingo Pérez e Irving Rivera por
ayudarnos a trazar las rutas y acompañarnos en los caminos que seguimos para desarrollar
este estudio. A Rosa Robles, Luis De La Rosa, Eloy Aybar y el resto del personal
administrativo por permitirnos y ayudarnos en la construcción y pruebas de los sistemas
planteados en este estudio. Por último, agradezco con mucha sinceridad a mi pareja
Ivanna Pérez Sánchez por toda su comprensión y apoyo, los cuales me permitieron mantener
la motivación para participar en este largo proyecto.

6 de 139
Tabla de Contenido
RESUMEN........................................................................................................................ 3
DEDICATORIA ............................................................................................................... 4
AGRADECIMIENTOS .................................................................................................... 5
Tabla de Contenido .......................................................................................................... 6
Lista de Figuras ................................................................................................................ 9
Lista de Tablas................................................................................................................ 12
Introducción ................................................................................................................... 13
CAPÍTULO I: Sistema de recepción de imágenes satelitales....................................... 16
1.1 Espectro electromagnético en la comunicación satelital ......................................... 17
1.1.1 La onda electromagnética: .................................................................................... 17
1.1.2 Perturbaciones atmosféricas en la comunicación satelital...................................... 18
1.1.3 Sub-bandas para comunicación satelital ................................................................ 21
1.2 Satélites Artificiales .................................................................................................. 22
1.2.2 Tipos de satélites .................................................................................................. 23
1.3 Órbitas satelitales ..................................................................................................... 24
1.3.1 Movimiento orbital............................................................................................... 24
1.3.2 Órbitas Geocéntricas por altitud ........................................................................... 25
1.3.3 Órbitas Geocéntricas por inclinación .................................................................... 27
1.4 Teledetección satelital ............................................................................................... 28
1.4.1 Teledetección Pasiva: ........................................................................................... 28
1.4.2 Teledetección Activa: ........................................................................................... 29

7 de 139
1.4.3 Escaneo de barrido de escobilla (Whisk Broom Scanner): .................................... 30
1.4.4 Escaneo de barrido por escobillón (Push Broom Scanner) .................................... 31
1.4.5 Resolución de la información telemedida ............................................................. 33
1.5 Satélites meteorológicos de órbita baja .................................................................... 35
1.5.1 Misiones SPOT y Pléiades ................................................................................... 36
1.5.2 Proyecto Landsat .................................................................................................. 36
1.5.3 Misiones Terra y Aqua ......................................................................................... 38
1.5.4 NOAA POES ....................................................................................................... 38
1.5.5 Satélite Miranda: .................................................................................................. 39
CAPÍTULO II: Diseño del sistema ................................................................................ 40
2.1 Satélites NOAA POES .............................................................................................. 41
2.1.1 Instrumentos de telemedición a bordo .................................................................. 42
2.1.3 Modos de transmisión de imágenes ...................................................................... 44
2.2 Radio definida por software ..................................................................................... 46
2.2.1 NooElec RTL2832U + R820T SDR & DVB-T (NESDR) .................................... 47
2.3 Antena de cruzado doble (DCA) .............................................................................. 50
2.3.1 Proceso de construcción ....................................................................................... 52
2.4 Antena Yagi de polarización circular ..................................................................... 54
2.5. Software utilizado .................................................................................................... 61
2.5.1 Gpredict ............................................................................................................... 61
2.5.2 GNU Radio .......................................................................................................... 65
2.5.3 WXtoIMG ............................................................................................................ 65
2.5.4 HRPT Reader ....................................................................................................... 66
2.6. Estructura del sistema ............................................................................................. 67
CAPÍTULO III: Construcción del Sistema .................................................................. 68

8 de 139
3.1 Construcción de estación terrena ............................................................................. 69
3.1.1 Base para antena omnidireccional:........................................................................ 69
3.1.2 Sistema de posicionado de antenas y seguimiento de satélites ............................... 73
3.1.3 Software Arduino ................................................................................................. 78
3.2 Construcción de antenas ........................................................................................... 87
3.2.1 Antena de cruzado doble ...................................................................................... 87
3.2.2 Antena Yagi circular ............................................................................................ 93
3.3 Obtención de señal .................................................................................................... 97
3.2.1 Señal APT ............................................................................................................ 97
3.2.2 Señal HRPT ......................................................................................................... 99
3.4 Comparación de Imágenes ..................................................................................... 101
3.4.1 Imágenes APT .................................................................................................... 101
3.4.1 Imágenes HRPT ................................................................................................... 102
Conclusiones ................................................................................................................. 103
Recomendaciones.......................................................................................................... 105
Referencias Bibliográficas ............................................................................................ 107
Apéndice A: Código del software de posicionamiento ................................................ 111
Apéndice B: NEMA 17 Datasheet ................................................................................ 118
Apéndice C: NEMA 23 Datasheet ................................................................................ 120
Apéndice D: Anteproyecto ........................................................................................... 121

9 de 139
Lista de Figuras
Figura 1. Efectos de la refracción de las capas atmosféricas en la trayectoria de las ondas
electromagnéticas [1]. ....................................................................................................... 19
Figura 2. Esquema de un movimiento orbital con la tierra como centro [Imagen Propia]. 25
Figura 3. Tipos de Teledetección. a) Teledetección activa. b) Teledetección pasiva [Imagen
Propia]. ............................................................................................................................ 29
Figura 4. Esquema de un sistema de escaneo WBS [9]. ................................................... 31
Figura 5 Esquema de un sistema de escaneo PBS [9]. ...................................................... 32
Figura 6. Comparativa entre barrido de escobilla (izquierda) y de escobillón (derecha)
[Imagen Propia]. .............................................................................................................. 33
Figura 7. Tipos de resolución [10]. a) Resolución espacial. b) Resolución radiométrica. .. 35
Figura 8. Incendio forestal de la cordillera central de la República Dominicana el 18 de
marzo de 2005 [15]. .......................................................................................................... 37
Figura 9. NooElec NESDR [23]....................................................................................... 48
Figura 10. Esquemático de un chip RTL2832 [23]. .......................................................... 49
Figura 11. Ejemplo de un Set Top Box [23]. .................................................................... 49
Figura 12. Patrón de radiación de dos dipolos cruzados [Imagen Propia]. ....................... 51
Figura 13. Patrón de radiación de 4 dipolos cruzados [Imagen Propia]............................ 51
Figura 14. De izquierda a derecha, las antenas Yagi A, B, C y D [Imagen Propia]. ......... 59
Figura 15. Respuesta de la antena Yagi a la variación de frecuencias [Imagen Propia]. ... 60
Figura 16. Pantalla principal de Gpredict [Imagen Propia]. ............................................. 62
Figura 17. Visualización de los detalles del próximo paso [Imagen Propia]. ................... 63

10 de 139
Figura 18. Modos de visualización del paso de los satélites en Gpredic. Modo Polar
(izquierda) y Gráfica de elevación/azimut respecto al tiempo (derecha) [Imagen Propia]. 63
Figura 19: Ventana de configuración del módulo en Gpredict [Imagen Propia]. ............. 64
Figura 20. Ventana del software WXtoIMG [Imagen Propia]. ........................................ 66
Figura 21. Estructura del sistema receptor de imágenes [Imagen Propia]. ....................... 67
Figura 22. Parte superior de la columna estructural antes de construir sobre ella [Imagen
Propia]. ............................................................................................................................ 69
Figura 23. Columna estructural con la primera capa de concreto [Imagen Propia]. .......... 70
Figura 24. Columna estructural con la segunda capa de concreto [Imagen Propia]. ......... 70
Figura 25. Graficas de trayectoria o paso de un satélite [Imagen Propia]. ........................ 74
Figura 26. Diagrama de flujo básico del sistema de posicionamiento [Imagen Propia]. ... 75
Figura 27. Motor NEMA 17 (Izquierda). Motor NEMA 23 (Derecha) [Imagen Propia]. .. 76
Figura 28. a) Arduino UNO, suficiente para mover dos los dos motores. b) Driver SMAKN
TB6600 para el motor de azimut. c) Driver MYSWEETY TB6600 para el motor de
elevación. d) Interruptores de límite [Imagen Propia]. ...................................................... 77
Figura 29. Simulación de movimiento paralelo de motores [Imagen Propia]. .................. 79
Figura 30. Graficas del movimiento de los motores en elevación y azimut [Imagen Propia]. ..... 81
Figura 31. Diagrama del inicio del movimiento del programa de movimiento [Imagen Propia]. . 82
Figura 32. Diagrama de flujo de la selección de camino de desplazamiento [Imagen Propia]. . 83
Figura 33. Flujo del programa cuando Vel es menor que Vaz [Imagen Propia]. .............. 84
Figura 34. Flujo del programa cuando Vel es mayor que Vaz [Imagen Propia]. .............. 85
Figura 35. Flujo del programa cuando Vel es igual que Vaz [Imagen Propia].................. 86
Figura 36. Unión de 5 vías (izquierda) y unión de 3 vías tipo T (derecha) [Imagen Propia]. 88

11 de 139
Figura 37. Tamaño de la distancia del dipolo al centro [Imagen Propia]. ......................... 89
Figura 38. De izquierda a derecha: conector eléctrico macho, conector eléctrico hembra y
monopolos con conectores de cobre machos remachados [Imagen Propia]. ...................... 90
Figura 39. Dimensiones de la pieza de ajuste de monopolo a unión T [Imagen Propia]. .. 90
Figura 40. Antena de cruzado doble para recibir APT [Imagen Propia]. .......................... 91
Figura 41. Conexión de los dipolos de la antena de cruzado doble [24]. ........................... 92
Figura 42. Perforación de los agujeros en la Yagi [Imagen Propia].................................. 94
Figura 43. Antena Yagi D de dos polarizaciones [Imagen Propia]................................... 95
Figura 44. Conexión de elementos radiadores en Yagi de polarización RHCP [25]. ......... 96
Figura 45. Señal del NOAA 19 [Imagen Propia]. ........................................................... 97
Figura 46. Imagen APT, canal A [Imagen Propia]. .......................................................... 98
Figura 47. Imagen APT, Canal B [Imagen Propia]. ......................................................... 99
Figura 48. Espectro de la señal HRPT del NOAA 18 [Imagen Propia]. ......................... 100
Figura 49. Comparación de imágenes APT [Imagen Propia]. ....................................... 101
Figura 50. Imagen HRPT obtenida durante el paso del NOAA 19 a la 7:00 pm del viernes
24 de noviembre de 2017 [33]. ....................................................................................... 102

12 de 139
Lista de Tablas
Tabla 1. Sub-bandas de frecuencia usadas en la comunicación satelital según los diferentes
organismos reguladores [4] [5] [6]. ................................................................................... 21
Tabla 2. Lista de satélites POES Advanced Tiros N [17, p. 42]. ....................................... 41
Tabla 3. Características de canal del instrumento AVHRR. .............................................. 42
Tabla 4. Características de la transmisión APT de los satélites POES [17, p. 226]. ........... 45
Tabla 5. Características de la transmisión HRPT de los satélites POES [17, p. 175]. ........ 46
Tabla 6. Frecuencias APT activas .................................................................................... 52
Tabla 7. Frecuencias HRPT ............................................................................................. 54
Tabla 8. Dimensiones de las antenas A y B. ..................................................................... 57
Tabla 9. Dimensiones de las antena Yagi C y D. .............................................................. 58
Tabla 10. Parámetros obtenidos durante la simulación de las antenas diseñadas. .............. 60
Tabla 11. Tabla de longitud y posición de los elementos de la Yagi D ............................. 93

13 de 139
Introducción
Las imágenes satelitales son una gran fuente de información sobre la composición,
estructura y forma del ecosistema. Nos ayudan a estudiar los cambios atmosféricos y a
realizar un seguimiento de la superficie. Dentro de una imagen satelital pueden encontrarse
datos sobre el crecimiento poblacional de una ciudad, el establecimiento de personas dentro
de un territorio, el desplazamiento de las masas de hielo o el crecimiento de la vegetación de
un bosque. La manera más sencilla de encarar un proyecto de investigación cuyo objeto de
estudio tenga una naturaleza de gran extensión es mediante el uso de una imagen satelital.
Estos procesos de investigación son auxiliados mediante la ayuda de un sistema
computarizado cuya función es la de analizar grandes volúmenes de datos, datos encerrados
dentro de las imágenes satelitales. Existen muchos métodos para la obtención de imágenes
satelitales, uno de los más comunes es adquirirlas a través de internet accediendo a las
plataformas en línea de organizaciones que poseen satélites dedicados a estas tareas.
La motivación para la realización de este estudio surge del interés por la explorar la
versatilidad del procesamiento digital de imágenes con el fin de estudiar y monitorear el
comportamiento del crecimiento de la vegetación y los efectos de la deforestación dentro del
territorio de la República Dominicana respecto al paso del tiempo.
Planteamiento del problema: Existen muchos inconvenientes a la hora de adquirir
estas imágenes. La tasa de actualización de las imágenes suele ser un problema, las agencias
pueden reducir la tasa de actualización de una zona para darle prioridad a otra o incluso el
satélite puede simplemente no tomar fotografías de una zona para ahorrar memoria, por esta

14 de 139
misma razón es que el área geográfica cubierta por las imágenes también suele variar. Por
otra parte, varias de las plataformas suelen comercializar las imágenes de alta resolución con
altos precios.
La NOAA (Administración Nacional Oceánica y Atmosférica, por sus siglas en
inglés) cuenta con satélites de baja altura (LEO’s) los cuales capturan imágenes de alcance
regional con propósitos meteorológicos. Estos satélites son conocidos como la constelación
POES y tienen de especial en que las imágenes que capturan son transmitidas hacia la tierra
para poder ser recibidas de forma gratuita por cualquier usuario que cuente con el equipo
necesario.
Justificación: La investigación busca aprovechar la información transmitida por los
satélites NOAA POES para proveer a la Escuela de Ingeniería de la Universidad de las vías
y los medios para obtener imágenes satelitales. En la misma se explican los principios detrás
de los métodos y tecnologías que utilizan los satélites meteorológicos durante la obtención
de datos. Junto con esto se busca crear una estructura física con la cual se pueda realizar el
seguimiento en tiempo real de satélites de órbitas no geoestacionarias. Una de las ventajas de
esta investigación es que permitirá crear una plataforma que se sumará a las estrategias de
enseñanza en comunicación satelital dentro de la Escuela de Ingeniería de la Universidad
APEC.

15 de 139
Objetivo general: Diseñar y construir un sistema que capture imágenes satelitales y las
procese de forma digital.
Objetivos específicos:
1. Determinar la estructura de un sistema de análisis de imágenes satelitales.
2. Diseñar y construir las antenas apropiadas para la buena captura de la señal satelital
en la banda de VHF (para imágenes de baja resolución) y para la banda de UHF
(para imágenes de alta definición).
3. Diseñar y construir el sistema de seguimiento satelital.
4. Diseñar y construir el sistema de computación para la recomposición de la señal
satelital en una imagen.
Alcance: Este estudio se limita a comparar las imágenes obtenidas mediante los satélites
NOAA POES sobre el territorio de la isla de la española, no busca realizar una comparación
entre las imágenes de las distintas plataformas de distribución ni de sus productos. Los datos
presentados en estos estudios son de libre acceso en línea. Este estudio tiene un total de 4
meses para ser completado. Los materiales utilizados para la construcción de las distintas
herramientas y sistemas son de bajo costo y deben ser fácilmente adquiribles en tiendas
convencionales o con una rápida búsqueda en plataformas de venta en línea.

16 de 139
CAPÍTULO I:
Sistema de recepción de
imágenes satelitales

17 de 139
Capítulo I: Sistema receptor de imágenes satelitales
1.1 Espectro electromagnético en la comunicación satelital
1.1.1 La onda electromagnética:
Las ondas electromagnéticas no son más que las fluctuaciones del campo
electromagnético a través del espacio, esto es, que existe una componente de campo eléctrico
tanto como una componente de campo magnético, ambas perturbando y viajando libremente
por el espacio, a la fecha sin poder explicar el medio que utilizan para desplazarse. Dichas
ondas fluctúan de forma senoidal y se ha determinado que en el espacio libre (y de forma
muy aproximada en el aire) se mueven a una velocidad constante “c” de aproximable a 3x108
m/s, conocida como la “velocidad de la luz” [1, p. 1058]. Al tiempo transcurrido entre la
repetición de la intensidad más alta de la onda electromagnética alcanza es llamado un ciclo.
La cantidad de ciclos que una onda puede realizar en un espacio de tiempo es conocido como
su frecuencia, normalmente se mide en ciclos por segundo, unidad denominada como Hertz
(abreviado Hz) [2, p. 4]. Esta frecuencia puede variar de algunos pocos Hertz hasta cientos
de millones por segundo. La distancia recorrida por la onda mientras transcurre el intervalo
de un ciclo se denomina como longitud de onda. Esta relación entre la velocidad, la
frecuencia y la longitud de la onda está dada por la ecuación:
𝐶 = 𝑓 × 𝜆
Donde: C, es la constante de la velocidad de la luz en metros/segundo
F, es la frecuencia de la onda en Hz ciclos
𝜆, es la longitud un ciclo de la onda en metros

18 de 139
1.1.2 Perturbaciones atmosféricas en la comunicación satelital
Para el estudio de su movimiento, se suele describir el comportamiento de las ondas
electromagnéticas en base a las condiciones del espacio libre que, aunque son teóricas, se
aproximan mucho a lo observado experimentalmente, pero para la mayoría de los servicios
de comunicación satelital, se tiene que tomar en cuenta el comportamiento de las ondas a
medida que traspasan la atmósfera. Se propagan como cualquier onda, solo que éstas no están
sujetas a un medio físico como sí lo están las ondas mecánicas. Por ejemplo, la luz se puede
mover por el aire, por el agua, por materiales sólidos translúcidos como el vidrio o incluso
por el espacio exterior. Sin embargo, sufren de las mismas perturbaciones que sufren de
forma normal las ondas, como lo son la refracción, la reflexión y la difracción.
Refracción Atmosférica: la trayectoria del haz de ondas se curva a medida que
traspasa las capas atmosféricas. Este mismo efecto provoca que las observaciones espacio-
tierra sufran problemas para ubicar a sus astros. En la figura 1 se observa un ejemplo en que
la posición de un satélite respecto al eje es diferente de la que percibe un observador en la
tierra debido a la curvatura que sufre la trayectoria de las ondas al pasar por las capas
atmosféricas. Este fenómeno sucede debido a la variación del índice de refracción “n”. Para
lograr que un frente de onda se dirija en una trayectoria con un ángulo “V”, es necesario
apuntarlo con un cierto ángulo V’ que permite una refracción atmosférica tal que pueda
obtenerse el ángulo deseado [1, p. 1065-1070].

19 de 139
Figura 1. Efectos de la refracción de las capas atmosféricas en la trayectoria de las ondas
electromagnéticas [1].

20 de 139
Reflexión de las ondas de radio: Algunas condiciones climatológicas pueden ser
favorables, por ejemplo, las corrientes de aire caliente encerradas entre capas de aire frío
pueden conducir las ondas mediante reflexión como si de un conducto de fibra óptica se
tratara, lo que permite extender el rango de la comunicación. Sin embargo, en la capa más
alta de la atmósfera de la tierra se encuentra la ionósfera, que se extiende entre los 60 y los
1000 kilómetros de altitud.
Esta capa recibe este nombre debido a que la radiación proveniente del sol y del
espacio en forma de rayos ultravioleta, rayos x y rayos gamma, logra ionizar partículas y
dado a la baja densidad del aire a esta altura, las colisiones entre las mismas son muy poco
frecuentes, provocando que se mantengan por largo tiempo flotando alrededor de la tierra.
Este fenómeno eleva la tempera de forma vertiginosa hasta los 80° Celsius, pero su propiedad
más importante es que éstas partículas ionizadas son conductoras y cuando se les dirige un
frente de onda, éste se absorbe o refleja.
Por debajo de los 3 MHz suelen ser absorbidas por la ionósfera, pero al entrar en la
banda MF gran parte de su energía es reflejada de regreso a la tierra, lo que es aprovechado
para realizar enlaces de comunicación de miles de kilómetros. Al aumentar la frecuencia
hasta la banda de VHF (30 MHz) se consigue penetrar profundo en la ionósfera, pero el
alcance de la onda se reduce hasta unos pocos cientos de kilómetros al estar más tiempo en
exposición al efecto de absorción. Es por encima de la banda UHF (300 MHz) que se
consigue penetrar la ionósfera y es aquí donde nacen las sub bandas que utilizan los servicios
de telecomunicaciones que se encuentran en la órbita geoestacionaria. [3, p. 9]

21 de 139
1.1.3 Sub-bandas para comunicación satelital
Las bandas de microondas usadas en comunicación satelital se ubican formalmente a
partir de los 300 MHz, pero debido a la multiplicidad de aplicaciones que tienen lugar en el
espectro de radiofrecuencias, organizaciones como la UIT (Unión Internacional de
Telecomunicaciones), la IEEE (Institute of Electronic and Electric Engineer) y la OTAN
(Organización del Tratado del Atlántico Norte), designan subdivisiones del espectro de
frecuencias entre las cuales deben distribuirse sistemáticamente estos servicios.
Tabla 1. Sub-bandas de frecuencia usadas en la comunicación satelital según los diferentes
organismos reguladores [4] [5] [6].
Banda UIT Banda IEEE Banda OTAN Servicio
VHF
30 - 300
MHz
VHF A: 0-250 MHz 137 - 138 MHz & 138 - 144 MHz:
Investigación espacial & Satélites
Meteorológicos.
148 - 150 MHz: Operaciones espaciales
UHF
0.3 - 3 GHz
L
1 - 2 GHz
D: 1 - 2 GHz
1559 - 1610: Radio Navigation Satellite
Services
1610 - 1660 MHz: Mobile Satellite Service
1675 - 1695 MHz: Meteorological federal
users
S
2 - 4 GHz
E: 2-3 GHz
F: 3-4 GHz
2020 - 2110 MHz: Earth Exploration
Satellite Service
2320 - 2345 MHz: Radio Satellite
SHF
3 - 30 GHz
C
4 - 8 GHz
G: 4-6 GHz
H: 6-8 GHz
5.83 - 5.85 GHz: Amateur Satellite
Operations
X
8 - 12 GHz
I: 8-10 GHz
7.25 - 8.4 GHz: Fixed Satellite and Mobile
Satellite
8.5 - 10 GHz: Radiolocalización
Ku
12-18 GHz
J: 10-20 GHz
12.2 to 12.7 GHz: Broadcasting Satellite
Service
14.0 - 14.5 GHz: Fixed Satellite Service

22 de 139
Ka
26.5-40 GHz
K: 20-40 GHz
27.5 - 31 GHz: Satellites Uplinks
EHF
30 - 300
GHz
V
40 - 75 GHz
L: 40-60 GHz 60 - 65 GHz: Military crosslink
communication between satellites.
W
75-110 GHz
M
60 - 100 GHz
76 GHz - 78 GHz Military radar targeting,
95 - 97 GHz: Millimeter-wave radar research
and tracking
71–76 GHz & 81–86 GHz:
Telecomunicaciones satelitales de muy alto
data rate.
1.2 Satélites Artificiales
Se puede denominar como satélite a cualquier cuerpo (asteroide, luna, planeta o
máquina) que orbita alrededor de otro, normalmente de mayor tamaño (un planeta, una
estrella o hasta otro asteroide). Por ejemplo, la luna es un satélite porque orbita a La Tierra,
pero la Tierra es un satélite porque órbita alrededor del sol y de igual forma el sol es un
satélite porque orbita alrededor del centro de la Vía Láctea a unos 828 miles de kilómetros
por hora, arrastrando consigo a todo el sistema solar [2, p. 793]. Dependiendo de su
procedencia, denominamos como satélites naturales a aquellos cuerpos orbitales originados
en el cosmos y como satélites artificiales a aquellos desarrollados u originados por acción del
hombre.
Los satélites artificiales nacieron durante carrera espacial entre Estados Unidos y la
extinta Unión Soviética a mediados del siglo XX. Los segundos lograron poner en órbita el
día 4 de octubre de 1957 al primer satélite artificial, el Sputnik I. A partir de este importante
hito tecnológico, la implementación de satélites ha ido ganando terreno a una velocidad
abismal dentro de una gran cantidad de aplicaciones, algunos son útiles para elaborar mapas,

23 de 139
otros más para recopilar datos que ayuden a prever las condiciones atmosféricas del planeta.
Entre estos, el Sistema de Posicionamiento Global (GPS, por sus siglas en inglés), que
determina la ubicación/posición de un objeto en el planeta, funciona a partir de una red de
satélites artificiales. A su vez, los sistemas de telecomunicaciones digitales actuales como la
televisión y los teléfonos celulares funcionan gracias a satélites artificiales [2, p. 794].
1.2.2 Tipos de satélites
Existe una infinidad de aplicaciones y niveles de ciencia en los que estos ingenios
espaciales pueden entrar, pero es fácil establecer dos categorías generales: Los satélites de
comunicación y los satélites de observación.
Los primeros son empleados en las telecomunicaciones como una forma de transferir
datos a través de largas distancias, a lugares donde es difícil el acceso o cuando es primordial
la seguridad de estos datos. La esencia del satélite de comunicaciones es actuar como un
repetidor de microondas que recibe señales de comunicación de una estación transmisora y
la reenvía a uno o más receptores. Esta categoría agrupa servicios como la telefonía, la radio
digital, la televisión digital, el internet y muchos otros cuya finalidad es poner a disposición
datos ubicados en una fuente distante.
Por otro lado, los satélites de observación no persiguen la pura movilización o
distribución de información, buscan generar, recolectar y procesar información, la cual puede
ser transmitida a una estación terrena. Estos satélites tienen propósitos científicos y
experimentales. La mayoría ofrece datos que apoyan estudios en distintas ramas de la ciencia
como la física, la astronomía, la meteorología, entre otras.

24 de 139
1.3 Órbitas satelitales
Los satélites se mueven en distintos tipos de órbitas y existen diversas maneras de
catalogarlas que van desde la altura o distancia a la que se encuentran del cuerpo que orbitan,
la inclinación de su órbita o incluso el mismo cuerpo que orbitan. Se dice que los cuerpos
que orbitan al sol tienen una órbita heliocéntrica y los que orbitan alrededor de la tierra se
dice que su órbita es geocéntrica. Dentro de las órbitas geocéntricas, se encuentran las órbitas
por altitud y por inclinación [2].
1.3.1 Movimiento orbital
El concepto de órbita hace referencia al movimiento orbital. El mismo se origina de
un movimiento parabólico de caída libre que evoluciona a uno circular cuya aceleración
tangencial es proporcionada por una de las 4 interacciones fundamentales del universo, la
interacción gravitatoria. Esta es una deformación del espacio causada por la materia que
aumenta a medida que aumenta la masa de los objetos y disminuye a medida que aumenta la
distancia entre los mismos. Y esta fuerza es representada en esta fórmula conocida como la
Ley de Gravitación Universal, formulada por Isaac Newton.
𝐹 = 𝐺 𝑚1𝑚2
𝑟2
Donde: F, es la fuerza de atracción experimentada, medida en Newtons (N);
G, es la constante de gravitación universal (6,674 × 10−11 N·m²/kg²);
m1, es la masa de objeto que atrae medida en kilogramos (kg);
m2, es la masa del objeto atraído, medida en kilogramos (kg);
r, es la distancia entre los objetos.

25 de 139
Con esta fórmula, se entiende que la interacción gravitatoria aumenta a medida que
los objetos se acercan entre sí, pero podemos determinar la aceleración que experimenta el
objeto a una distancia determinada, utilizando a la expresión de la segunda ley de Newton,
𝐹 = 𝑚𝑎
Donde F, es la fuerza que experimenta un objeto;
m, es la masa del objeto;
a, es la aceleración que experimenta.
Si un cuerpo lleva una velocidad tangencial lo suficientemente alta, podrá mantenerse
en una constante caída libre en la que el vector de atracción gravitatoria rotará a medida que
el momento de fuerza del objeto también lo hace. Por ende, permanecerá girando alrededor
cuerpo primario en lo que se llama como movimiento orbital. En la figura 2 puede verse una
representación de este movimiento.
Figura 2. Esquema de un movimiento orbital con la tierra como centro [Imagen
Propia].
1.3.2 Órbitas Geocéntricas por altitud
Según su altura, las órbitas pueden clasificarse como [2, p. 797]:

26 de 139
Órbita terrestre baja (LEO, Low Earth Orbit): se designa como satélite órbita
baja a todo lo que se encuentre a una altura inferior a los 2,000 Km y tienen un período orbital
que está entre los 84 y 127 minutos. Por debajo de los 160 km de altura las órbitas no son
sostenibles ya que se experimenta un arrastre atmosférico que hace perder altitud a los
satélites. De la misma forma, un período orbital por encima de los 140 minutos en esta órbita
puede hacer que el satélite pierda altura y reingrese a la atmósfera. Si el período orbital es
inferior a los 80 minutos, puede que sea muy difícil establecer comunicación el mismo, lo
que podría degenerar en un escape gravitatorio. En esta órbita están ubicados muchos
satélites dedicados a la investigación.
Órbita terrestre media (MEO, Medium Earth Orbit): La órbita media es un
espacio que está delimitado entre los 2 mil kilómetros de altura y la órbita geoestacionaria,
que se encuentra concretamente a 35,786 kilómetros. Es una región muy usada para sistemas
de posicionamiento y navegación. Los períodos orbitales en esta órbita van de 2 a 24 horas.
Debido a que esta órbita tiene una altura inferior a la órbita geoestacionaria, los satélites no
llegan a posicionarse estáticamente respecto a la superficie, haciendo que se necesiten más
satélites para cubrir la superficie, pero la misma distancia logra que el tiempo de respuesta
sea considerablemente reducido. La altura más usada es a los 20 mil kilómetros, la cual brinda
un período orbital de 12 horas. A esta altura se encuentran los Satélites de Posicionamiento
Global (GPS).
Órbita terrestre geoestacionaria (GEO, Geostationary Earth Orbit): Esta es la
órbita más importante (y costosa) para el mundo de las telecomunicaciones. Está ubicada a
35,786 kilómetros. En la misma, los satélites se mueven de este a oeste por encima del

27 de 139
ecuador. Esta órbita se denomina geosíncrona debido a que período orbital de los satélites
que se encuentran en ella es el mismo que el de la tierra. Mientras esto ocurra los satélites se
visualizarán como si estuvieran estáticos respecto a la superficie de la tierra. De este modo
podemos establecer enlaces de comunicación sumamente estables siempre que se cuente con
la potencia de recepción adecuada.
Órbita terrestre alta (HEO, High Earth Orbit): se puede llamar de órbita alta a
cualquier satélite por encima de la órbita geoestacionaria. Después de esta altura, se consigue
que el período orbital de los satélites sea menor que el período orbital de la tierra, por lo que
los satélites se aprecian desde la superficie como si se movieran desde el oeste hacia el este,
cuando orbitan de este a oeste. En esta órbita se localizan muchos satélites de investigación
espacial y militar como los del Proyecto Vela.
1.3.3 Órbitas Geocéntricas por inclinación
Según su inclinación, las órbitas pueden clasificarse como [2, p. 799]:
● No inclinadas: cuando la órbita del satélite está alineada con el ecuador.
● Inclinadas: son todas aquellas órbitas cuya inclinación es diferente de 0 grados
respecto al ecuador. Entre estas se pueden nombrar dos sub categorías:
○ Órbita polar: Cuando la inclinación de la órbita es completamente 90 grados
respecto al ecuador y el satélite orbita rodeando la tierra de polo a polo.
○ Órbita sincrónica al sol (SSO): en esta el satélite le da la vuelta a la tierra
pasando por los pero con una inclinación de casi 90 grados, combinando su
período orbital para pasar por el ecuador siempre a la misma hora del día, al

28 de 139
mismo tiempo que se traslada para darle rodear la tierra y pasar por cada punto
de su superficie a la misma hora del día siguiente. Este tipo de órbita se utiliza
mucho en la telemetría para recabar datos de alta resolución.
1.4 Teledetección satelital
La teledetección, también conocida como censado remoto, consiste en la captura de
información sobre un objeto o evento mediante un mecanismo o instrumento que no tiene
contacto ni perturba al objeto de estudio. Es necesario que exista una forma de valorar o
representar las características de un fenómeno sin alterar su estado o estar en contacto el
mismo. Gracias a las operaciones de teledetección podemos estudiar fenómenos fascinantes
como el comportamiento del sol, el curso de las perturbaciones atmosféricas, la composición
de los cuerpos celestes o el desarrollo de la vegetación a escala global [7].
La forma más común de teledetección se realiza mediante la observación de una
franja del espectro electromagnético, la cual varía su fase, intensidad o frecuencia cuando es
sometida a un determinado estímulo. Por tal razón, podemos clasificar a los sistemas de
teledetectores en dos grupos: Teledetectores Pasivos y Teledetectores Activos.
1.4.1 Teledetección Pasiva:
Este tipo de sistemas observa las perturbaciones en el espectro electromagnético proveniente
del área que observa. La radiación que captan puede ser emitida o reflejada por el fenómeno
que se observa, pero nunca proviene o es afectada por el sistema que realiza la medición. La
información obtenida por estos sensores es una representación pura del patrón de la radiación
proveniente del fenómeno bajo estudio, sea que este sea generado por el mismo objeto o sea

29 de 139
radiación absorbida y/o reflejada por el fenómeno, pero que en realidad sea originada por
otra fuente.
1.4.2 Teledetección Activa:
Los sensores remotos mediante teledetección activa emiten un haz de ondas de radio
sobre el objeto o área de interés y analizan el patrón creado por la onda reflejada. Esta técnica
consigue hacer un análisis más profundo en áreas u objetos opacos. Debido que la radiación
es emitida durante el proceso de observación por el observador mismo, a menos que otros
factores lo impidan, las observaciones pueden ser realizadas en cualquier momento,
independientemente de que el objeto de estudio se encuentre emitiendo o reflejando
radiación. Cabe destacar que esto demanda un mayor consumo de energía y una mayor
eficiencia tecnológica por parte del sistema, en especial al incrementar la distancia entre el
objeto de estudio y el sistema de teledetección.
Figura 3. Tipos de Teledetección. a) Teledetección activa. b) Teledetección pasiva
[Imagen Propia].
En la figura 3 se aprecia un ejemplo de estos sistemas. En la parte a) el satélite envía
una onda y cuenta el tiempo que tarda en reflejarse y regresar hasta él. En la parte b) el satélite
observa la superficie en un momento en el que el sol puede aportar energía para la medición.

30 de 139
1.4.3 Escaneo de barrido de escobilla (Whisk Broom Scanner):
El escaneo WBS, también conocido como ATS (Across Track Scannig, traducible
como “escaneo transversal a la ruta”) es una metodología de telemedición satelital en la que
se utiliza un solo detector espectroscópico en el cual se enfoca la luz infrarroja mediante un
espejo vibratorio. El espejo rota perpendicularmente a la dirección del movimiento del
satélite escaneando transversalmente el terreno. Una vez que el espejo completa su rotación,
regresa a su posición original completando una línea de pixeles. Debido a que solo se tiene
un fotodetector, las observaciones y mediciones son muy precisas y fácilmente ajustables en
caso de que el fotodetector pierda sensibilidad. El mayor inconveniente de este sistema es
que el espejo debe rotar siempre a una velocidad sincronizada con el muestreo del
fotodetector para poder generar una matriz de pixeles lo más acertada a la superficie que
sobrevuela. Un problema común de los satélites que utilizan esta tecnología, es que el espejo
se desacopla ligeramente debido al desgaste, produciendo líneas negras entre las líneas de
escaneo [8, p. 219].
En la figura 4 se puede observar el un sistema de escaneo WBS en el cual el detector,
representado como un cubo, recibe un rayo de luz proveniente de un espejo. Se puede apreciar
que el espejo va realizando líneas de muestreo transversales (perpendiculares) a la dirección
en la que se mueve el satélite.

31 de 139
Figura 4. Esquema de un sistema de escaneo WBS [9].
1.4.4 Escaneo de barrido por escobillón (Push Broom Scanner)
El escaneo PBS, también denominado como ATS (Along Track Scanning, traducible
como “escaneo a lo largo de la ruta”) es una metodología de telemedición en la que en lugar
de tener solo un sensor espectroscópico precisamente ajustado, se tienen muchos sensores
precisamente alineados [8, p. 225]. Al estar enfocados en un punto por más tiempo, cada
sensor puede captar más luz, dando una imagen mucho más precisa. Estos sistemas resultan
ser costosos debido a que es complicado fabricar varios sensores espectroscópicos que
respondan igual al mismo rango de longitudes de onda. En la figura 5 se aprecia como una
fila de sensores se mueve en conjunto hacia adelante mientras observan distintas franjas del
terreno, formando un sistema PBS. Se utiliza una lente fija para dirigir la luz a los sensores.

32 de 139
Figura 5 Esquema de un sistema de escaneo PBS [9].
Los términos de escobilla y escobillón provienen de una analogía que explica las
diferencias entre ambas tecnologías de observación. Como se puede ver en la figura 6, una
escobilla le permite barrer un camino, pero tendrá que barrer de lado a lado para barrer bien
el camino, mientras que con un escobillón podrá barrer todo el camino en la misma pasada.

33 de 139
Figura 6. Comparativa entre barrido de escobilla (izquierda) y de escobillón (derecha)
[Imagen Propia].
1.4.5 Resolución de la información telemedida
En el mundo de la informática, se suele entender el concepto de resolución como la
dimensión de píxeles de ancho y alto de una imagen, pero esto es una concepción errónea e
incompleta. Dentro de toda imagen o grupo de imágenes se puede establecer 4 tipos de
resoluciones [8, pp. 115-136]:
1) La resolución espacial: Se refiere al tamaño o porcentaje del objeto de estudio que
cada pixel o muestra representa. Dicho de otra forma, es el espacio que es cubierto
por cada pixel de la imagen a una determinada distancia de observación. En la
parte a de la figura 7 se muestra una misma fotografía en diferentes resoluciones
espaciales. La foto de la izquierda tiene una resolución espacial de 1 metro, lo que

34 de 139
significa que cada píxel representa un cuadrado de 1 metro de lado (1 m2). En la
foto de la derecha, con una resolución espacial de 4 metros (4 metros de lado ó 16
m2), la imagen es menos comprensible.
2) La resolución espectral: Dicha resolución hace referencia a la cantidad de franjas
y longitudes de onda que son cubiertas por la observación. Por ejemplo, si el
sistema de teledetección utiliza el espectro del infrarrojo cercano y su análisis
tuviera una resolución espacial entre los 700 nm (nanómetros) y los 2000 nm, se
podría decir que el sistema tiene una resolución espacial de 1300 nm en NIR.
3) Resolución radiométrica: Este tipo de resolución abarca la capacidad que tiene el
sistema para cuantizar los resultados de sus observaciones. Esta resolución se mide
en bits, normalmente unos 8 a 14 bits por muestra. Que una imagen tenga una
resolución espacial de n bits significa que cada pixel de esa imagen puede tener
2𝑛 valores diferentes, es decir, si tiene una resolución radiométrica de 8 bits, cada
píxel puede tener 256 valores diferentes. En la parte b de la figura 7 se observa la
misma imagen con distintas resoluciones radiométricas.
4) Resolución temporal: es el intervalo de tiempo en que el sistema puede volver a
muestrear al objeto o área de estudio. Naturalmente, esta resolución interesa en
caso de estudios que requieran una regularidad o repetición de la medición, ya sea
para realizar un análisis exploratorio o temporal. Es una escala de tiempo que se
puede medir desde milisegundos hasta meses.

35 de 139
Figura 7. Tipos de resolución [10]. a) Resolución espacial. b) Resolución radiométrica.
.
1.5 Satélites meteorológicos de órbita baja
Los satélites meteorológicos de órbita baja pueden obtener datos con una gran
resolución. Normalmente, los satélites ubicados en la órbita LEO son colocados en una
inclinación de 90 o 98 grados. La primera se le conoce como órbita polar, y permite que un
satélite pase por el mismo punto de la tierra cada vez que completa una órbita. La segunda
se conoce como órbita síncrona al sol (SSO), lo que significa que su movimiento parece
geoestacionario al sol, de forma que el satélite pasa por un mismo punto de la tierra todos los
días aproximadamente a la misma hora del día [11].

36 de 139
1.5.1 Misiones SPOT y Pléiades
El Centro Nacional de Estudios Espaciales (CNES) de Francia, consiguió en 1978 la
aprobación del gobierno de Francia para desarrollar el programa de satélites SPOT [12],
Satélite Para la Observación de la Tierra (por sus siglas en francés), una serie de satélites
puestos en órbita con la finalidad de producir imágenes radiométricas. Se encuentran en una
órbita SSO a una altitud aproximada de 822 km los más antiguos y 694 km los más avanzados
y modernos. Junto a los satélites SPOT están los satélites Pléiades [13], lanzados en 2003 a
la órbita SSO a 694 km de altura, son los satélites de CNES de mayor resolución, capaces de
escarbar hasta los 0.5 metros. Tienen la ventaja de que su instrumento de obtención de
imágenes puede ser reposicionado en un arco de movimiento de 60 grados, permitiéndole
mantener la mirada sobre un punto del planeta por mucho más tiempo así como evitar
observar ciertas áreas. SPOT tiene a su disposición un gran banco de imágenes de alta
resolución de cobertura global con más de 20 años de imágenes, lo que permite realizar
estudios de seguimiento temporal. Las imágenes que captan son comercializadas a través del
sitio www.intelligence-airbusds.com en donde ponen a disposición imágenes de resoluciones
de 0.5 a 20 metros por pixel.
1.5.2 Proyecto Landsat
Son satélites de observación terrestre puestos en órbita por el gobierno
estadounidense, desarrollados por la NASA y administrados por el USGS (United States
Geological Survey) [14]. Están ubicado a una altura de 705 km y se encuentran en una órbita
SSO de 98.2º. Este programa cuenta con 9 satélites de los cuales el primero fue lanzado en
1972, 8vo fue lanzado en 2013 y el noveno espera ser lanzado en 2020. Los primeros 5

37 de 139
cuentan con el Landsat Multispectral Scanner (MSS) de una resolución de 60 m (metros),
los satélites 4 y 5 llevan integrado el Landsat Thematic Mapper (TM) de una resolución
espacial de 30 m, los Landsat 6 y 7 cuenta con un versiones mejoradas del TM llamadas
Enhanced Thematic Mapper (ETM) y Enhanced Thematic Mapper Plus ( ETM+)
respectivamente, el Landsat 8 y el 9 cuentan con un sistema en sistema de barrido por
escobillón (pushbroom) denominado Operational Land Imager que puede barrer la superficie
en 9 bandas de frecuencia con una resolución de hasta 15 m por pixel. Sus imágenes pueden
ser vistas a través del sitio web earthexplorer.usgs.gov.
Figura 8. Incendio forestal de la cordillera central de la República Dominicana el 18 de
marzo de 2005 [15].

38 de 139
1.5.3 Misiones Terra y Aqua
Con los nombres oficiales de EOS AM-1 [16] y EOS PM-1, respectivamente, son un
satélite de investigación multinacional desarrollados por la NASA los cuales realizan órbitas
SSO a 708 km de altura. Fueron lanzados en diciembre de 1999 y mayo de 2002. Fueron
diseñados con el propósito de monitorear los efectos del cambio climático sobre el medio
ambiente y cuentan con los siguientes aparatos de telemedición:
● ASTER (Advanced Spaceborne Thermal Emission and Reflection Radiometer)
● CERES (Clouds and the Earth's Radiant Energy System) de 15 m
● MISR (Multi-angle Imaging Spectro Radiometer)
● MODIS (Moderate-resolution Imaging Spectroradiometer) de 250 m
● MOPITT (Measurements of Pollution in the Troposphere)
Los datos recabados por estos satélites son publicados en el sitio web de la NASA
search.earthdata.nasa.gov junto con los datos de los demás satélites que administra esta
agencia espacial. La figura 8 fue tomada mediante el satélite Aqua.
1.5.4 NOAA POES
Los satélites POES (Polar-orbiting Operational Environmental Satellites) son una
constelación de satélites meteorológicos de órbita SSO pertenecientes a la NOAA (National
Oceanic and Atmospheric Administration) en colaboración con la EUMETSAT (European
Organization for the Exploitation of Meteorological Satellites) y desarrollados por la NASA
[17]. Este proyecto de satélites meteorológicos es el de mayor antigüedad puesto que en el
año 1960 lograron poner en órbita el primer satélite meteorológico exitoso, el TIROS. Los
satélites de la serie TIROS desarrollados por la NASA ya cuentan con más de 50
39 de 139
lanzamientos pertenecientes a distintas agencias, pero la NOAA en particular cuenta con 20
lanzamientos de los cuales 9 aún se encuentran en funcionamiento y 3 de ellos están activos,
los llamados NOAA’s.
Estos satélites cuentan con el AVHRR (Advanced very-high-resolution radiometer)
el cual es un instrumento que genera una imagen de la radiación reflejada por la superficie
dentro de diferentes bandas de frecuencias de microondas [17, p. 54]. La resolución este
radiómetro es de 1.1 km por píxel, lo que es 20 veces inferior a los satélites Terra y Aqua
además de la NASA y unas 100 veces inferior a la resolución de los satélites Spot y Pléiades
del CNES, pero a diferencia de la mayoría de estos, la información obtenida por los NOAA
POES es completamente libre y fácil de obtener directamente de los satélites.
1.5.5 Satélite Miranda:
Con el nombre oficial de Venezuelan Remote Sensing Satellite (VRSS-1) es el primer
satélite lanzado por una colaboración entre el gobierno de Venezuela y el gobierno de China.
Fue lanzado octubre del año 2012 con el propósito de realizar observaciones de alta
resolución del territorio venezolano. Se encuentra a una altura de 639.5 kilómetros con una
órbita SSO. El satélite puede tomar 350 imágenes al día por su capacidad de almacenamiento
de 512 Gb, los cuales transmite a la Base Aérea Generalísimo Francisco Miranda en
Venezuela a una tasa de 190 Mbps en las bandas transmisión IEEE C, S y X. La resolución
pancromática del satélite es de 2.5 m. El gobierno venezolano pone a disposición las
imágenes captadas por su satélite a través del sitio web miranda.abae.gob.ve [18].

40 de 139
CAPÍTULO II:
Diseño del sistema

41 de 139
Capítulo II: Diseño del sistema
2.1 Satélites NOAA POES
Los datos de telemedición que se desea obtener en este estudio serán proveídos por
los satélites de observación terrestre de órbita síncrona al sol de la organización NOAA, los
satélites de la constelación POES. POES son las siglas de Polar Operational Environmental
Satellite, que en español puede traducirse como “Satélite Ambiental de Operación Polar”.
Tienen la misión de aportar datos sobre condición ambiental de la superficie del planeta. Su
órbita es transversal a la rotación de la tierra con un ángulo cercano a 90° con respecto al
ecuador, concretamente a 98 grados, lo que les permite moverse a la par con la posición del
sol, en lo que se denomina una “órbita síncrona al sol” (SSO, por sus siglas en inglés). Los
últimos POES pertenecen al proyecto Advanced TIROS N. En la tabla 2 se encuentra una
lista de los satélites Adv. TIROS N por orden de lanzamiento.
Tabla 2. Lista de satélites POES Advanced Tiros N [17, p. 42].
Nombre Fecha de lanzamiento COSPAR ID
NOAA 8 28 de marzo de 1983 1983-022A
NOAA 9 12 de diciembre de 1984 1984-123A
NOAA 10 17 de septiembre de 1986 1986-073A
NOAA 11 24 de septiembre de 1988 1988-089A
NOAA 13 9 de agosto de 1993 1993-050A
NOAA 14 30 de diciembre de 1994 1994-089A
NOAA 15 13 de mayo de 1995 1998-030A
NOAA 16 21 de septiembre de 2000 2000-055A
NOAA 17 24 de junio de 2002 2002-032A
NOAA 18 20 de mayo de 2005 2005-018A
NOAA 19 9 de febrero de 2009 2009-005A

42 de 139
Entre estos satélites, los NOAA 8 al 10 y NOAA 13, no se encuentran en
funcionamiento. Los satélites NOAA 11, 12, 14, 16 y 17 se encuentran funcionales, pero no
están en operación debido a que muchos de sus instrumentos ya han sufrido varios daños.
Los satélites NOAA 15, 18 y 19 se encuentran actualmente activos, aunque se estima NOAA
15 podría ser dado de baja para antes del año 2020 debido a los daños que ha sufrido en sus
equipos.
2.1.1 Instrumentos de telemedición a bordo
Los instrumentos que se encuentran en estos satélites son [17, pp. 96-174]:
AVHRR/3: El Advance Very High Resolution Radiometer, es un instrumento de
telemedición pasiva, compuesto por una fila de sensores que responden a diferentes
longitudes de onda. El AVHRR/3 es capaz de capturar 6 canales en los siguientes espectros:
Tabla 3. Características de canal del instrumento AVHRR.
AVHRR/3 Características de Canal
Canal Resolución Lambda (um) Uso típico
1 1.09 km 0.58 - 0.68 Mapeo diurno de nubes y superficies
2 1.09 km 0.725 - 1.00 Delimitación entre tierra y agua
3A 1.09 km 1.58 - 1.64 Detección de nieve y hielo
3B 1.09 km 3.55 - 3.93 Mapeo nocturno de nubes
4 1.09 km 10.30 - 11.30 Medición de la tempera del mar
5 1.09 km 11.50 - 12.50 Medición de la tempera del mar

43 de 139
HIRS/3 (High-Resolution Infrared Sounder/3): es una sistema de detección de
franjas espectroscópicas que detecta radiación en 20 canales a longitudes de onda muy
específicas entre los 0.69 y los 14.96 um (micrómetros). Sirve para hacer un sondeo de la
distribución de temperaturas a unos 40 km de la superficie.
AMSU (Advanced Microwave Sounding Unit): Son sistemas detección de franjas
espectroscópicas al igual que el sistema HIRS/3, pero este se enfoca en sondar la densidad y
temperatura del vapor de agua en las distintas capas de la atmósfera del planeta. La versión
B está más enfocada en estudiar las nubes que forman precipitaciones y las capas de hielo al
pasar por los polos.
SBUV (Solar Backscatter Ultraviolet Radiometer): Este instrumento sirve para
medir la radiación proveniente del sol que difracta en las capas de la tierra. La medición se
realiza en 12 canales que van desde los 252 a los 339 nm. Durante el paso nocturno, puede
medir la irradiación de la tierra en el ultravioleta cercano.
SEM (Space Environment Monitor): Este instrumento sirve para medir la
radiación emitida por los Cinturones de Van Allen que se encuentran a los mil km de la
superficie de la tierra, pero tan solo a 200 km de los POES. Esto lo realiza mediante un
detector de partículas cargadas.
SARSAT (Search and Rescue Satellite Aided Tracking System): instrumento para
detectar y localizar transmisores de situación de emergencia (Emergency Locator
Transmitters, ELTs) y balizas de radio de emergencia indicadoras de posición (Emergency
Position-Indicating Radio Beacons, EPIRBs).

44 de 139
DCS/2 (Data Collection System): recoge telemetría global utilizando un enlace de
radiofrecuencia de 401,65 MHz transmitido por plataformas como boyas, globos y estaciones
meteorológicas remotas.
2.1.3 Modos de transmisión de imágenes
De todos los instrumentos disponibles en los satélites POES, el sensor elegido para la
producción de matrices de datos agrupadas por posición de muestreo es el instrumento
AVHRR el cual permite un muestreo pasivo radiación infrarroja de la superficie en 5 canales
de distintas longitudes de onda. La información producida por este sensor es administrada
por la unidad MIRP (Manipulated Information Rate Processor) el cual procesa esa
información para enviarla a través de los siguientes 4 modos de transmisión:
APT (Automatic Picture Transmission): Mediante este tipo de comunicación se
puede enviar 2 de los 6 canales de información del instrumento AVHRR. La información que
se envía por este canal es una versión reducida de los datos obtenidos por el instrumento
AVHRR el cual se compone cada 3 líneas de escaneo con una resolución reducida. En una
sola línea de una imagen APT se colocan 2 líneas de los sensores AVHRR uno al lado del
otro. A estos se le aplica una corrección geométrica para corregir los efectos de la curvatura
de la tierra. El fin de este tipo de transmisión de baja resolución es que pueda ser captada por
estaciones terrenas de bajo costo con simples receptores de VHF ya que consiste de una señal
de audio de 2400 Hz modulada en FM. En la tabla 4 se muestran las características de
transmisión de un enlace APT.

45 de 139
Tabla 4. Características de la transmisión APT de los satélites POES [17, p. 226].
Transmisión APT
Frequency Band 136 to 139 MHz band
Carrier Frequencies 137.50 to 137.62 MHz
Frequency Stability ±0.002%
Out-of-band Emissions -60 dB at ± 170 KHz and greater from carrier frequency
Transmitted Bandwidth -3 dB at ± 25 KHz from carrier frequency
Modulated Rate and Type ±17 KHz FM with a 2.4 KHz subcarrier
EIRP ±33.5 dBm
HRPT (High Resolution Picture Transmission): La transmisión HRPT es una
multiplexación de 5 de los 6 canales del sensor AVHRR en su máxima resolución e
información de control TIP (TIROS Information Processor) que no es más de data
comprimida de todos los demás instrumentos del satélite (HIRS/3, DCS/2, SBUV/2, SEM).
Este modo de transmisión se realiza en tiempo real sin encriptación, por lo que puede ser
demodulada por cualquier usuario con un receptor UHF en la banda S. En la tabla 5 se
muestran más características de transmisión para un enlace HRPT.
LAC (Local Area Cover): Es en esencia la misma data transmitida vía HRPT, pero
esta es almacenada en la unidad DTR del satélite y no es directamente obtenible ya que se
transmite sólo a las estaciones receptoras de la NOAA .
GAC (Global Area Cover): Es un tipo de transmisión donde se transmite una versión
de baja resolución de las imágenes captadas por el AVHRR compuesta de sólo 1 de cada 3

46 de 139
líneas de escaneo al igual que la transmisión APT, pero esta es almacenada en una unidad
DTR y sólo transmitida a las estaciones receptoras de la NOAA.
Tabla 5. Características de la transmisión HRPT de los satélites POES [17, p. 175].
HRPT Transmission Characteristics
Line Rate 360 lines/minute
Data Channels 5 transmitted, 6 available
Data Resolution 1.1 km
Carrier Modulation Digital split phase, phase modulated
Transmitter Frequency (MHz) 1698.0 or 1707.0 MHz primary,
1702.5 MHz secondary
Transmitter Power (EOL) 6.35 W (38.03 dBm)
Radiated Power (dBm, @ 63 degrees) 40.13
Polarization:
STX1
STX2
STX3
RCP
LCP*
RCP
* Except when STX2 is connected to the emergency omni antenna which is also RCP.
2.2 Radio definida por software
Radio definida por software es un acercamiento tecnológico en el que se busca
traspasar las tecnologías usadas para la interpretación de las ondas de radio del dominio físico
(hardware) al conceptual (software) mediante la implementación de programación. La radio
por software elimina el uso de mezcladores, sintetizadores, detectores de impulso,
moduladores, demoduladores, comparadores entre otros aditamentos necesarios para las
47 de 139
comunicaciones analógicas y los reinterpreta en la forma de funciones de código programable
y por lo tanto, convertir todas las señales continuas involucradas en fragmentos discretos
cuantizados mediante el muestreo [19].
Los únicos aditamentos que necesita un equipo de radio por software son:
1) Antena: la cual es el elemento transductor que pasa las ondas electromagnéticas
del aire hasta el sistema.
2) Amplificadores: para dar ganancia al nivel de la señal recibida a través del aire.
3) Muestreador: quien realiza la discretización y cuantificación de la señal para
traspasarla hasta el equipo de cómputo o procesamiento.
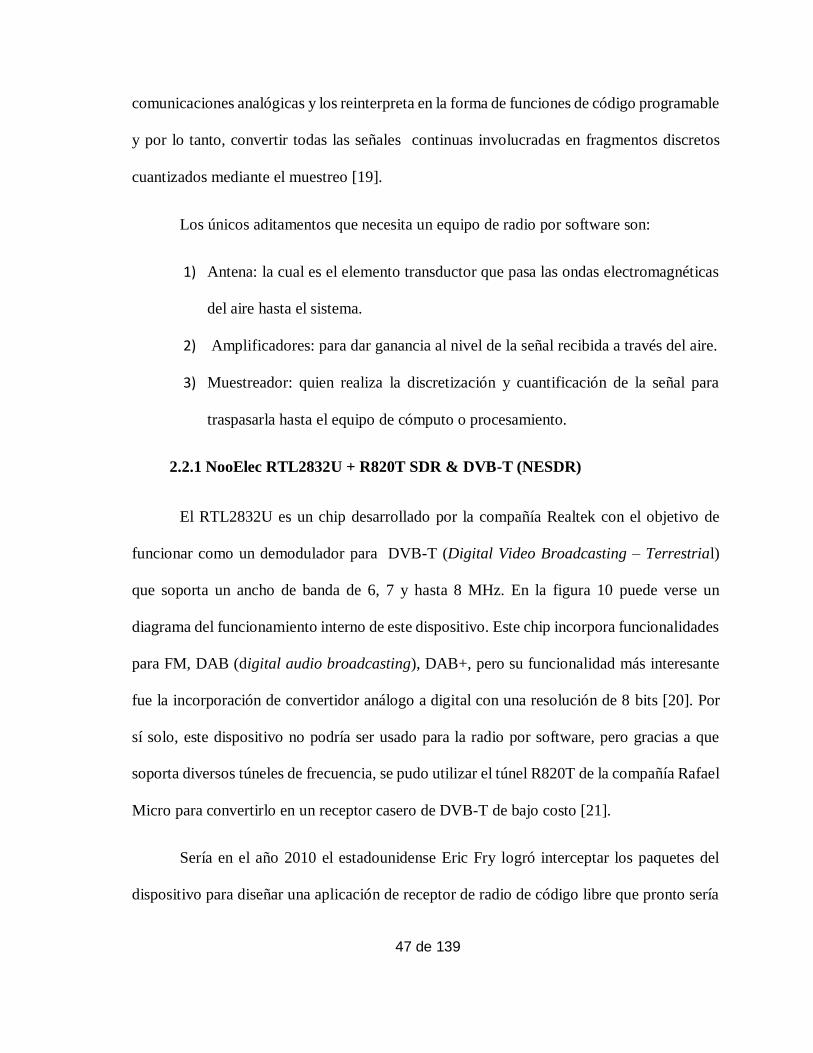
2.2.1 NooElec RTL2832U + R820T SDR & DVB-T (NESDR)
El RTL2832U es un chip desarrollado por la compañía Realtek con el objetivo de
funcionar como un demodulador para DVB-T (Digital Video Broadcasting – Terrestrial)
que soporta un ancho de banda de 6, 7 y hasta 8 MHz. En la figura 10 puede verse un
diagrama del funcionamiento interno de este dispositivo. Este chip incorpora funcionalidades
para FM, DAB (digital audio broadcasting), DAB+, pero su funcionalidad más interesante
fue la incorporación de convertidor análogo a digital con una resolución de 8 bits [20]. Por
sí solo, este dispositivo no podría ser usado para la radio por software, pero gracias a que
soporta diversos túneles de frecuencia, se pudo utilizar el túnel R820T de la compañía Rafael
Micro para convertirlo en un receptor casero de DVB-T de bajo costo [21].
Sería en el año 2010 el estadounidense Eric Fry logró interceptar los paquetes del
dispositivo para diseñar una aplicación de receptor de radio de código libre que pronto sería

48 de 139
desarrollada por una extensa comunidad de usuarios que explotaría sus capacidades hasta
convertirlo en un sistema de radio por software de fuente libre (open source), pudiendo
alcanzar hasta 3.2 MHz de ancho de banda [22].
La compañía NooElec aprovecha esto para comercializar una línea de dispositivos
SDR llamados NESDR por precios entre 20 y 40 dólares. Puede ser utilizado como un radio
DVB-T común, pero mediante a la instalación del driver correcto puede instalarse como SDR
en un computador con abarcar frecuencias entre 25 y 1750 MHz de forma nativa. Este
dispositivo puede recibir señales entre -97 y +10 dBm y debido a su unidad AGC (Automatic
Gain Control) con un LNA (Low Noise Amplifier) de +35dB puede llegar hasta -132 dBm.
En la figura 9 puede apreciarse un ejemplar de este dispositivo [21] [23].
Figura 9. NooElec NESDR [23].
Las figuras 10 y 11 son esquemas del diseño para el chip R820T contenido en este
dispositivo.

49 de 139
Figura 10. Esquemático de un chip RTL2832 [23].
Figura 11. Ejemplo de un Set Top Box [23].
50 de 139
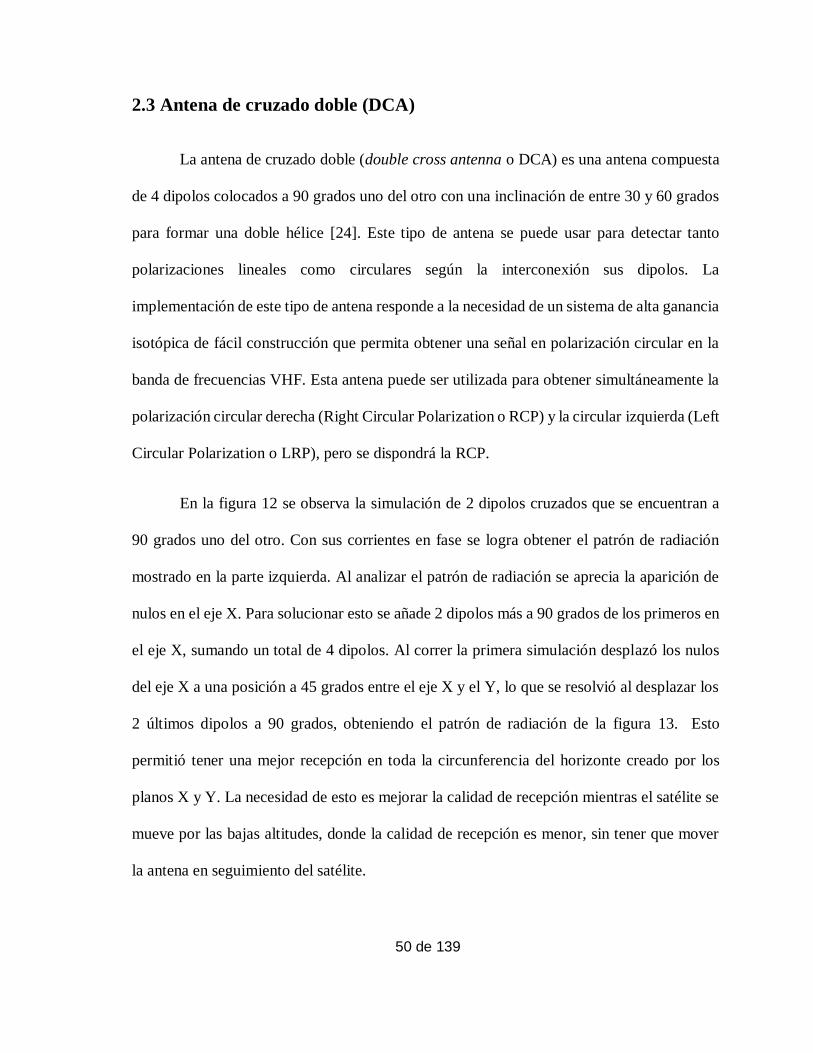
2.3 Antena de cruzado doble (DCA)
La antena de cruzado doble (double cross antenna o DCA) es una antena compuesta
de 4 dipolos colocados a 90 grados uno del otro con una inclinación de entre 30 y 60 grados
para formar una doble hélice [24]. Este tipo de antena se puede usar para detectar tanto
polarizaciones lineales como circulares según la interconexión sus dipolos. La
implementación de este tipo de antena responde a la necesidad de un sistema de alta ganancia
isotópica de fácil construcción que permita obtener una señal en polarización circular en la
banda de frecuencias VHF. Esta antena puede ser utilizada para obtener simultáneamente la
polarización circular derecha (Right Circular Polarization o RCP) y la circular izquierda (Left
Circular Polarization o LRP), pero se dispondrá la RCP.
En la figura 12 se observa la simulación de 2 dipolos cruzados que se encuentran a
90 grados uno del otro. Con sus corrientes en fase se logra obtener el patrón de radiación
mostrado en la parte izquierda. Al analizar el patrón de radiación se aprecia la aparición de
nulos en el eje X. Para solucionar esto se añade 2 dipolos más a 90 grados de los primeros en
el eje X, sumando un total de 4 dipolos. Al correr la primera simulación desplazó los nulos
del eje X a una posición a 45 grados entre el eje X y el Y, lo que se resolvió al desplazar los
2 últimos dipolos a 90 grados, obteniendo el patrón de radiación de la figura 13. Esto
permitió tener una mejor recepción en toda la circunferencia del horizonte creado por los
planos X y Y. La necesidad de esto es mejorar la calidad de recepción mientras el satélite se
mueve por las bajas altitudes, donde la calidad de recepción es menor, sin tener que mover
la antena en seguimiento del satélite.

51 de 139
Figura 12. Patrón de radiación de dos dipolos cruzados [Imagen Propia].
Figura 13. Patrón de radiación de 4 dipolos cruzados [Imagen Propia].

52 de 139
2.3.1 Proceso de construcción
Para la construcción de esta antena el primer paso fue establecer la frecuencia de
trabajo, como es para captar la señal de los 3 satélites NOAA POES funcionales que orbitan
la tierra, los cuales trabajan a frecuencia distintas, se tomó la media de las 3 frecuencias de
transmisión de señal APT de estos 3 satélites, que es la suma de las frecuencias dividida
entre la cantidad de frecuencias.
Tabla 6. Frecuencias APT activas
Satélite Frecuencia APT activa
NOAA 15 137.6200 MHz
NOAA 18 137.9125 MHz
NOAA 19 137.1000 MHz
Frecuencia media 137.5442 MHz
Debido a que estos satélites se encuentran a 830 kilómetros de la superficie, se
procede al calcular la pérdida que sufre la señal en el espacio libre.
𝐿𝑏𝑓 = 32.4 + 20 log 𝑓[𝑀𝐻𝑧] + 20 log (𝑑[𝐾𝑚])
𝐿𝑏𝑓 = 32,4 + 20 log 138 + 20 log 830
𝐿𝑏𝑓 = 32,4 + 42.8 + 58.38
𝐿𝑏𝑓 = 32,4 + 42.8 + 58.38
𝐿𝑏𝑓 = 133.6 dB

53 de 139
El transmisor de la señal APT tiene una potencia de radiación PIRE de 33.5 dBm y nuestro
receptor SDR tiene un margen de señal que va desde -97 a +10 dBm. Se podría suponer que
las pérdidas por cableado y conexión son de 3 dB, nuestro presupuesto de potencia sería el
siguiente.
33.5 𝑑𝐵𝑚 − 133.6 𝑑𝐵 − 3 𝑑𝐵 + 𝐺 ≥ −97 𝑑𝐵𝑚
Con el que podemos calcular la ganancia de nuestro sistema de antena.
𝐺 ≥ −97 𝑑𝐵 − 33.5 𝑑𝐵 + 133.6 𝑑𝐵 + 3𝑑𝐵
𝐺 ≥ 6 dB
Nuestra antena no cuenta con mucha ganancia debido a que en su diseño se priorizó
un patrón de radiación casi isotrópico. Para compensar se utilizará la unidad de control de
ganancia de nuestro SDR, con el que podremos añadir hasta 35 dB a nuestra señal.

54 de 139
2.4 Antena Yagi de polarización circular
Se plantea la construcción de una antena tipo Yagi para obtener el enlace de bajada
de la señal HRPT de los satélites NOAA POES. La idea de utilizar esta antena surge debido
a que la frecuencia a la que trabaja este enlace se encuentra entre la línea que separa la
banda de frecuencias UHF y SHF.
Utilizando el mismo criterio que se usó para la construcción de la antena de cruzado
doble, se tomará la frecuencia media entre las 3 frecuencias de transmisión de estos
satélites.
Tabla 7. Frecuencias HRPT
Satélite Frecuencia
NOAA 15 1702.5 MHz
NOAA 18 1707.0 MHz
NOAA 19 1698.0 MHz
Promedio 1702.5 MHz
La frecuencia media resultante es 1702.5 MHz, que a la vez resulta ser la frecuencia
de transmisión del NOAA 15.
Conociendo la frecuencia y la distancia a la que se encuentran los satélites, podemos
calcular las pérdidas en el espacio libre que sufre la transmisión. Para esto usaremos la
ecuación siguiente:
𝐿𝑏𝑓 = 32.4 + 20 log 𝑓[𝑀𝐻𝑧] + 20 log (𝑑[𝐾𝑚])

55 de 139
Resolviendo esta ecuación tenemos.
𝐿𝑏𝑓 = 32,4 + 20 log (1702.5 𝑀𝐻𝑧) + 20 log(830 𝑘𝑚)
𝐿𝑏𝑓 = 32,4 𝑑𝐵 + 64.62 𝑑𝐵 + 58.38 𝑑𝐵
𝐿𝑏𝑓 = 155.4 𝑑𝐵
Esta es la atenuación que sufre la señal en su camino. Utilizando el poder de
transmisión, la atenuación de la señal y el piso margen de señal de nuestro SDR, podremos
determinar la ganancia de nuestra antena.
De las especificaciones del transmisor HRPT de los satélites NOAA descrito en el
apartado anterior, sabemos que el poder de radiación o PIRE del transmisor es 40.13 dBm.
Igualmente, conocemos que el margen de ruido de señal de nuestro SDR está entre los -97 y
los +10 dBm. Se podría suponer que la pérdida por asuntos de cableado y conexión es de
2dB con lo que se puede proceder a despejar la ganancia de nuestra antena.
40.13 𝑑𝐵𝑚 − 155 𝑑𝐵 − 2 + 𝐺 > −97 𝑑𝐵𝑚
𝐺 > −97 𝑑𝐵 − 40.13𝑑𝐵 + 155 𝑑𝐵 + 2 𝑑𝐵
𝐺 > 20 dB
Esto quiere decir que nuestro sistema de antena debe proporcionar una ganancia
superior a los 20 dB. Debido a que se plantea diseñar un sistema de antenas de fácil
construcción, se opta por el diseño de una antena Yagi. Al consultar fuentes de diseño, se
presentó el problema de que una Yagi con una ganancia de 20 dBi debería tener 38 elementos
directores, por lo que se redujo la ganancia de diseño a 15 dBi, lo cual puede conseguirse con

56 de 139
tan solo 15 elementos directores. El resto de la ganancia será aportada por un LNA trabajando
a 25 dB.
Debido a que el proceso de cálculo de una antena Yagi es muy extenso, se recurre a
la implementación de programas de diseño y métodos de construcción para auxiliarnos en
esta tarea. Para esto, se desarrollarán 4 prototipos de antena Yagi, los cuales serán simuladas
con el programa MMANA-GAL para realizar experimentos.
Requerimientos de diseño
● La frecuencia de construcción es 1702.5 MHz
● El diámetro de los elementos directores es 2 mm.
● El diámetro del elemento de soporte es 10 mm.
● Debe tener como mínimo 15 elementos
● Ganancia aproximada de 15 dBi.
Yagi A: La primera Yagi fue diseñada mediante el proceso de diseño Yagi-Uda [25].
El cual da como resultado una antena de 15 elementos con una ganancia aproximada de 16.35
dBi. Las dimensiones de esta antena se muestran en la tabla 8.
Yagi B: La antena diseñada mediante el proceso Yagi-UDA, fue introducida en el
programa de simulación YagiCAD6 [26]. Al correr la simulación la antena arrojó un
resultado de -5.86 dBi de ganancia. Una posible causa de este error es la distancia de
separación fija entre elementos que utiliza el proceso Yagi-UDA. Luego de correr un proceso
de optimización dentro del software YagiCAD6, se logró ajustar la antena para alcanzar una
ganancia de 15.54 dBi. La tabla 8 contiene las dimensiones de sus elementos y la comparativa
con la antena antes de ser ajustada. Se aprecia que aunque la longitud no varió mucho

57 de 139
respecto a la original, es apreciable el cambio significativo en la posición de los elementos.
Igualmente, es notable la reducción del reflector respecto al radiador.
Tabla 8. Dimensiones de las antenas A y B.
Elemento Longitud A
(mm)
Posición A
(mm)
Longitud B
(mm)
Posición B
(mm)
Variación
Longitud
(mm)
Variación
Posición
(mm)
Reflector 90.7 0 83.6 0 -7.1 0
Radiador 88.1 54.3 87.0 63.6 -1.1 9.3
D1 81.1 108.5 81.0 77.0 -0.1 -31.5
D2 81.1 162.8 80.8 108.6 -0.3 -54.2
D3 79.4 217.1 77.3 202.2 -2.1 -14.9
D4 77.3 271.4 77.8 242.2 0.5 -29.2
D5 76.6 325.6 77.4 292.6 0.8 -33.0
D6 75.9 379.9 76.1 345.0 0.2 -34.9
D7 75.2 434.2 74.8 402.7 -0.4 -31.5
D8 74.1 488.4 72.6 462.9 -1.5 -25.5
D9 74.1 542.7 62.1 521.2 -12.0 -21.5
D10 74.1 597.0 70.1 564.5 -4.0 -32.5
D11 74.1 651.2 72.2 625.2 -1.9 -26.0
D12 74.1 705.5 71.8 697.0 -2.3 -8.5
D13 74.1 759.8 67.6 785.7 -6.5 25.9

58 de 139
Yagi C: El programa Yagi Calculator nos permite realizar el diseño de antenas Yagi
de topología DL6WU [27]. Con este asistente hemos obtenido las siguientes dimensiones y
desplazamientos. El software Yagi Calculator nos promete 16.6 dBi de ganancia. En la tabla
9 se encuentras las dimensiones resultantes.
Yagi D: Al introducir los datos de la antena Yagi C en el programa YagiCAD6, el
simulador calcula que la antena podrá aportar solo 9.34 dBi. Luego de realizar operaciones
de optimización sobre la antena, el software arroja un diseño para el cual promete aportar
14.68 dBi. Como se puede ver en la tabla 9, la variación en la longitud de los elementos es
casi imperceptible salvo en el radiador y el reflector donde son recortados 2.5 y 4 milímetros.
Por el otro lado, es apreciable la variación en la posición de los elementos, los cuales han
sido desplazados entre 5 y 18 milímetros de la posición en la que se encontraban.
Tabla 9. Dimensiones de las antena Yagi C y D.
Elemento
Longitud C
(mm)
Posición C
(mm)
Longitud D
(mm)
Posición D
(mm)
Variación
Longitud (mm)
Variación
Posición (mm)
Reflector 92.0 0 88.1 0 -3.9 0
Radiador 81.8 35.0 79.3 40.8 -2.5 5.8
D1 81.0 48.2 81.0 55.2 0.0 7
D2 80.0 79.9 80.0 85.6 0.0 5.7
D3 79.1 117.8 79.1 123.8 0.0 6
D4 78.3 161.8 78.3 168.9 0.0 7.1
D5 77.5 211.1 77.5 217.3 0.0 6.2
D6 76.8 263.9 76.6 269.6 -0.2 5.7
D7 76.2 319.4 76.2 323.9 0.0 4.5
D8 75.6 377.5 75.7 388.6 0.1 11.1

59 de 139
D9 75.0 438.3 75.0 444.5 0.0 6.2
D10 74.5 501.7 74.2 518.9 -0.3 17.2
D11 74.0 567.7 74.0 576.4 0.0 8.7
D12 73.5 635.5 73.3 637.2 -0.2 1.7
D13 73.1 704.2 72.8 707.4 -0.3 3.2
D14 72.7 773.8 72.4 783.8 -0.3 10
D15 72.4 844.2 72.3 862.7 -0.1 18.5
Y_
Figura 14. De izquierda a derecha, las antenas Yagi A, B, C y D [Imagen Propia].
En la figura 14 puede verse una comparación de las 4 antenas. Al simularlas mediante
el software MMANA-GAL y correr la simulación a la frecuencia de 1702.5 MHz se obtienen
los datos mostrados en la tabla 10.

60 de 139
Tabla 10. Parámetros obtenidos durante la simulación de las antenas diseñadas.
Antena
Parámetro A B C D
Ga (dBi) 3.9 11.56 15.07 14.97
R (ohm) 181.9 4.8 34.97 63.14
jX (ohm) 128.1 -12.91 -27.51 19.22
SWR 5.54 11.1 2.08 1.51
Az-3dB 27° 16° 15° 14°
El-3dB 140° 18° 16° 15°
La siguiente parte del experimento consiste en realizar un corrimiento de frecuencia
para descubrir cómo responde la antena por encima y por debajo de la frecuencia de
construcción. Esto debe hacerse así pues las señales que se desea obtener tienen un ancho de
banda de 4 MHz y están espaciadas a 4.5 MHz por encima y por debajo frecuencia de diseño
de estas antenas. La figura 15 muestra un gráfico con los resultados de este procedimiento.
Figura 15. Respuesta de la antena Yagi a la variación de frecuencias [Imagen Propia].

61 de 139
2.5. Software utilizado
2.5.1 Gpredict
GPredict es un programa de predicción de órbitas y seguimiento de satélites en tiempo
real [28]. Este es un software libre, facultado por Licencia Pública General GNU, por lo que
su código fuente es de libre acceso y puede ser modificado para ajustarse a las necesidades
del usuario. Este software predice la posición y la velocidad de un satélite en tiempo real
usando un modelo matemático de la órbita. Como cualquier otro programa de seguimiento
de satélites, toma tres tipos de entradas:
1. Elementos Keplerianos describiendo la órbita del satélite, así como la
posición y velocidad de los satélites en un tiempo dado t0.
2. Posición de la estación terrena en la tierra.
3. Tiempo y fecha en las cuales la posición y velocidad del satélite deberían ser
calculadas.
Para calcular la posición y velocidad del satélite, Gpredict utiliza el algoritmo
NORAD SGP4/SDP4, el cual resuelve la ecuación de Kepler del movimiento orbital y aplica
algunas correcciones para compensar por los efectos irregulares tales como la forma de la
tierra y la influencia gravitacional de otros cuerpos celestiales.
En la figura 16 se puede ver la pantalla principal de este programa. La parte inferior
de la ventana, permite explorar opciones adicionales concernientes a los satélites. Permite
seleccionar cada satélite de manera individual y visualizar la hora y el día en que pasaran.

62 de 139
Para esto se hace un clic en el menú desplegable de la parte inferior y se selecciona “Show
Next Pass” o “Future Passes”.
Figura 16. Pantalla principal de Gpredict [Imagen Propia].
También se puede ver su Azimut, Elevación, Pisada, Velocidad, entre otros datos,
como lo ilustra la figura 17.
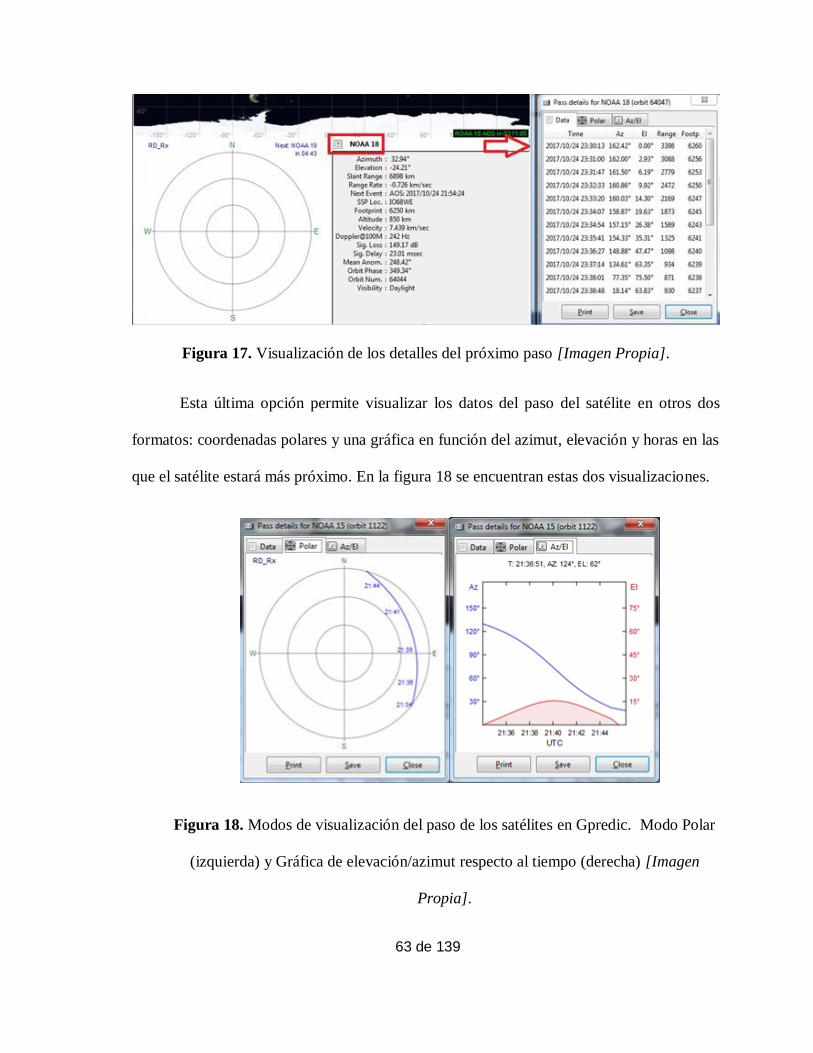
63 de 139
Figura 17. Visualización de los detalles del próximo paso [Imagen Propia].
Esta última opción permite visualizar los datos del paso del satélite en otros dos
formatos: coordenadas polares y una gráfica en función del azimut, elevación y horas en las
que el satélite estará más próximo. En la figura 18 se encuentran estas dos visualizaciones.
Figura 18. Modos de visualización del paso de los satélites en Gpredic. Modo Polar
(izquierda) y Gráfica de elevación/azimut respecto al tiempo (derecha) [Imagen
Propia].

64 de 139
En este módulo se ha colocado sólo los satélites NOAA 15, 18 y 19, pero si se desea
agregar o remover alguno, solo se debe editar el módulo o crear uno nuevo como se muestra
en la figura 19.
Figura 19: Ventana de configuración del módulo en Gpredict [Imagen Propia].
De esta forma, mediante este programa, se puede realizar un seguimiento preciso y
detallado de la trayectoria y posición en tiempo real de los satélites.

65 de 139
2.5.2 GNU Radio
Es una herramienta libre que se utiliza para el procesamiento de señales en radio
definido por software [29]. Fue creado por Proyecto GNU, el cual es un proyecto
colaborativo que tiene el objetivo de crear software y sistemas operativos completamente
libres. Gracias a este software se tiene la oportunidad de desarrollar conocimientos
estudiando a profundidad el espectro electromagnético y las distintas tecnologías de
comunicación de datos.
Este programa se conectará mediante USB con el dispositivo RTL-SDR para realizar
las funciones de radio definido por software. Además, se contará con un periférico universal
de radio definido por software (USRP, por sus siglas en inglés). El USRP no es más que un
transceptor computarizado que contiene 4 conversores de digital a análogo (D/A), 4 de
análogo a digital (A/D, y la interfaz con la que se introduce al equipo puede ser USB o puerto
de Ethernet.
2.5.3 WXtoIMG
Este software es un decodificador de señales de audio APT y WEFAX [30]. Soporta
acciones de grabación, decodificación, edición y visualización. Este programa se utilizará
para decodificar las señales de audio obtenidas de la demodulación de la señal APT y las
convertirá en imagen, de la misma forma, nos permitirá realizar varias acciones de
procesamiento digital de imágenes. En la figura 20 se muestra una ventana del programa en
la que se muestran imágenes grabadas.

66 de 139
Figura 20. Ventana del software WXtoIMG [Imagen Propia].
2.5.4 HRPT Reader
Es un software diseñado para decodificar la señal recibida mediante la transmisión
HRPT [31]. Este programa necesita que previamente se haya recolectado, desmodulado y
compilado un archivo binario con los datos de la señal pues no soporta funciones de
demodulación o grabación por sí solo. Debe ser auxiliado con programas como GNU Radio.
En la figura 21 se aprecia el software en funcionamiento.

67 de 139
2.6. Estructura del sistema
Con la información anteriormente desarrollada, la estructura final del sistema de
recepción sería la mostrada en la figura 21. Consiste en dos sistemas paralelos que se
utilizarían para recibir distintos tipos de imágenes. La señal APT es recibida por la antena
DCA para luego ser amplificada con ayuda de un LNA. Esta señal luego puede ser
muestreada por nuestro SDR y demodulada mediante GNU Radio. La información obtenida
luego es decodificada mediante el software WXtoIMG para ser convertido en una imagen.
Por otra parte, la señal HRPT debe ser obtenida mediante una antena Yagi Cruzada, la cual
debe moverse mediante el sistema de seguimiento de satélites que es coordinado gracias al
programa Gpredict. La señal HRPT obtenida es resultado de la acción conjunta de la antena
y el sistema de seguimiento. Luego, la señal pasa por el mismo proceso de muestreo,
demodulación hasta llegar al software HRPT Reader en el cual es decodificada y convertida
en imagen.
Figura 21. Estructura del sistema receptor de imágenes [Imagen Propia].

68 de 139
CAPÍTULO III:
Construcción del Sistema

69 de 139
Capítulo III: Construcción del Sistema
3.1 Construcción de estación terrena
3.1.1 Base para antena omnidireccional:
Las antenas para este diseño serán colocadas en el edificio 2 del campus de ingeniería
de la universidad APEC, cuyo tejado se encuentra a aproximadamente 10 metros de altura,
que a su vez se encuentra aproximadamente a 54 metros sobre el nivel del mar. La base para
estas antenas se colocó en la parte superior de una columna de concreto estructural a la cual
no ejercerá mucho peso, la misma puede verse en la figura 22.
Figura 22. Parte superior de la columna estructural antes de construir sobre ella [Imagen
Propia].
Sobre esta columna, de unos 45 cm de altura, se construyó un molde de soporte en
cuyo interior se colocó un tubo de PVC de 4 pulgadas el cual serviría para crear un huevo de
dicha forma sobre el cual luego se colocaría la antena. Este molde puede verse en la figura
23.

70 de 139
Figura 23. Columna estructural con la primera capa de concreto [Imagen Propia].
Dado que este primer molde solo aportaba 15 centímetros de profundidad al tubo (por
la irregularidad de la parte superior de la columna además de los refuerzos que se colocaron
dentro del cemento a modo de anclas) se decidió aplicar una segunda capa de concreto que
aportó 25 centímetros más de profundidad como puede verse en la figura 24.
Figura 24. Columna estructural con la segunda capa de concreto [Imagen Propia].

71 de 139
Este concreto tiene una densidad aproximada de 2200 𝑘𝑔/𝑚3. La base es un cubo
cuyas dimensiones aproximadas son 45cm x 45cm x 40cm con lo que su volumen debería
ser de 91125 𝑐𝑚3 menos el volumen del cilindro en su interior, que tiene un diámetro de 11
cm y una altura de 40 cm con lo cual su volumen es de 3801 𝑐𝑚3, tenemos 87,324 𝑐𝑚3 de
volumen de concreto. Con esto se puede calcular la masa y peso total de la base de concreto
mediante la siguiente formula:
m [kg] = 2200𝑘𝑔
𝑚3 × 87,324 𝑐𝑚3 ×
1
106
𝑚3
𝑐𝑚3= 193 𝑘𝑔
La masa resultante es aproximadamente 193 kg lo cual es equivalente a 422 libras.
Con lo cual se puede decir que esta base para antenas es bastante sólida y robusta como para
soportar fuertes cargas de viento.
Sobre la misma está colocado un mástil que no es más que una tubería de PVC de 4
pulgadas de diámetro que tiene una altura de 6 pies (1.83 metros) que al ser colocado en la
base deja exponer unos 1.43 metros. La carga de viento (en kg) experimentada por este mástil
con una velocidad de viento de 120 m/s se calcula por la siguiente fórmula:
𝐹 = 𝐴 × 𝑃 × 𝐶𝑑 × 𝐾𝑧 × 𝐺ℎ
Donde, A es el área que enfrenta el viento en 𝑚2,
P es la presión del viento en 𝑘𝑔/𝑚2,
Cd es el coeficiente de arrastre,
Kz es el coeficiente de exposición,
Gh es la respuesta de ráfaga,
El área enfrentada por el viento corresponde a la cara de la estructura en la cual el
viento impacta. Dado que el mástil es cilíndrico, se puede decir que toda su estructura es una

72 de 139
cara, pero dado que el viento se enfrenta solo a una mitad de esta, el área que enfrenta es la
mitad del área del cilindro. El radio del cilindro es de 5.5 cm y tiene una altura de 143 cm
con lo que su superficie total sería.
𝐴𝑐𝑖𝑙𝑖𝑛𝑑𝑟𝑜 = 2𝜋𝑟ℎ = 4942 𝑐𝑚2 = 0.49 𝑚2
Con lo que la mitad de su área sería de 2471 𝑐𝑚2 o 0.247 𝑚2.
La presión del viento se calcula mediante la siguiente expresión:
𝑃[ 𝑘𝑔/𝑚2] = 0.00256 × 𝑉[𝑘𝑚/ℎ]2 = 0.00256 × (120 )2 = 36.86 𝑘𝑔/𝑚2
El coeficiente de arrastre para un cilindro cuya altura es mayor del doble de su radio
puede estimarse en 1.2.
𝐶𝑑 = 1.2
El coeficiente de exposición se calcula mediante la fórmula:
𝐾𝑧 =𝑧
33
En la cual z es la altura desde el suelo hasta el punto medio de la antena. Debido a
que el mástil de la antena se encuentra a aproximadamente 11 metros del piso y que este
tiene una longitud de 1.43 metros. El valor de z es igual a 11.7 metros.
𝑘𝑧 =11.7 𝑚
33 𝑚= 0.35
El factor de respuesta a ráfaga de nuestro mástil se calcula mediante la ecuación:
𝐺ℎ = 0,65 + 0,60/ [(ℎ
33)
17
]
Donde h es la altura total del mástil que en nuestro caso es aproximadamente de 12.45
metros.

73 de 139
𝐺ℎ = 0,65 + 0,60/ [(12.45
33)
17
] = 1.34
Con lo que nuestra carga de viento sería igual a
𝐹 = 𝐴 × 𝑃 × 𝐶𝑑 × 𝐾𝑧 × 𝐺ℎ
𝐹 = 0.247 𝑚2 × 36.86𝑘𝑔
𝑚2× 1.2 × 0.35 × 1.34
𝐹 = 5.12 𝑘𝑔 ó 11.29 𝑙𝑏𝑠
Lo que significa que nuestra base de 193 kg podrá sostener la antena en su sitio y la
única preocupación frente a una condición de viento fuerte sería la firmeza estructural de los
mismos elementos que componen la antena.
3.1.2 Sistema de posicionado de antenas y seguimiento de satélites
La siguiente parte de la construcción de esta estación terrena es que requiere un
sistema de seguimiento de satélites. Este sistema tiene la función de seguir la trayectoria del
satélite mientras se desplaza de polo a polo. Con satélites geoestacionarios solo bastaría
ocupar un sistema de posicionado de antenas, el cual debe apuntar la antena hacia un satélite
cuya posición es fija respecto a la tierra. Sin embargo, para satélites de otras órbitas, se
necesita que el sistema actualice la dirección en la que apunta la antena en cada momento, ya
que estos se moverán continuamente.
Para desarrollar esto, se utilizarán los datos de posición indicados por el programa
Gpredict que pueden verse en la figura 25 los cuales serán transmitidos de forma serial hasta
un microcontrolador Arduino. Este programa toma en cuenta la posición geográfica de la
estación terrena para generar los cálculos de azimut y elevación, todo generado mediante
operaciones geométricas en las que también se incluye geometría esférica. En la figura 25 la

74 de 139
línea azul representa el azimut (posición respeto al eje cartesiano) y la línea roja representa
el ángulo de elevación (respecto a la elevación y posición de la antena).
Figura 25. Graficas de trayectoria o paso de un satélite [Imagen Propia].
El microcontrolador tendrá la función de calcular los movimientos que realizarán dos
motores, uno para la azimut y otro para la elevación de la antena. Debido a que el
microcontrolador Arduino no puede proporcionar la corriente necesaria para que los motores
funcionen por si solos, además de que reducir la complejidad de la programación, se recurre
a la utilización de conductores (drivers) para dirigir a estos motores de movimiento. Los
motores que se utilizarán serán motores paso a paso, los cuales pueden realizar giros
fragmentados en pasos con un ángulo de movimiento de gran precisión. En la figura 26 puede
verse un diagrama de la conexión de estos sistemas.
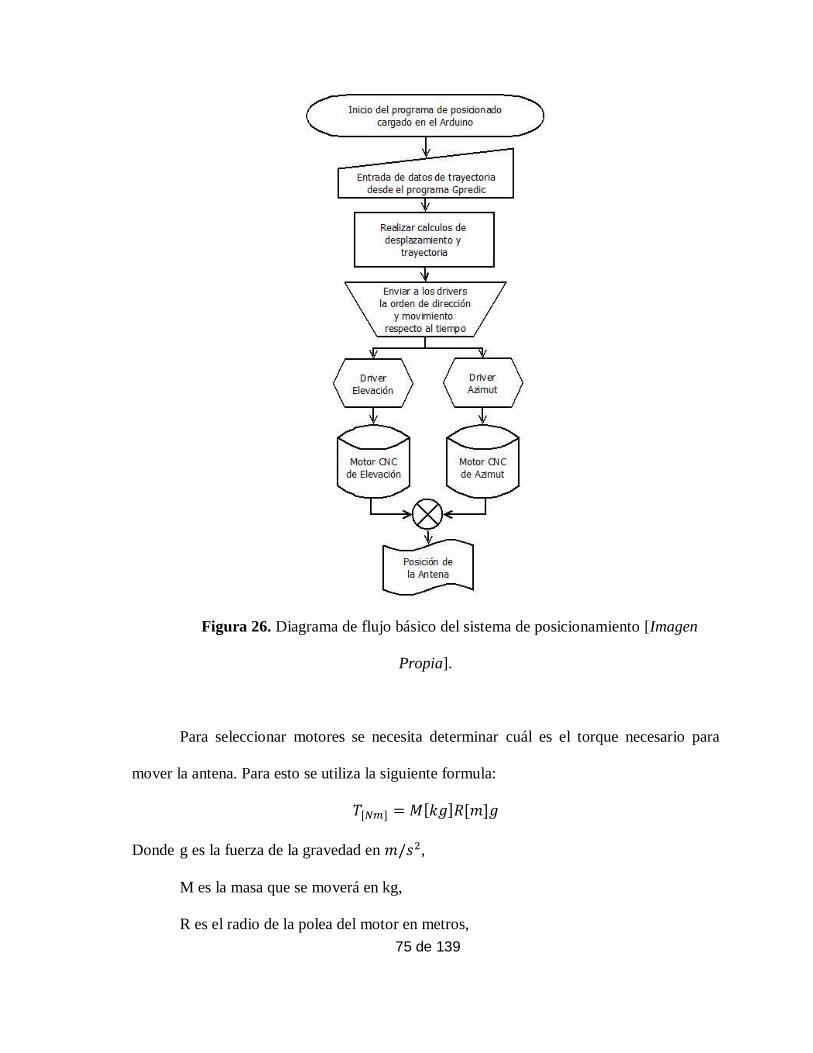
75 de 139
Figura 26. Diagrama de flujo básico del sistema de posicionamiento [Imagen
Propia].
Para seleccionar motores se necesita determinar cuál es el torque necesario para
mover la antena. Para esto se utiliza la siguiente formula:
𝑇[𝑁𝑚] = 𝑀[𝑘𝑔]𝑅[𝑚]𝑔
Donde g es la fuerza de la gravedad en 𝑚/𝑠2,
M es la masa que se moverá en kg,
R es el radio de la polea del motor en metros,

76 de 139
Se estima y coloca como restricción que este sistema de posicionado manejará una
antena con un peso inferior a 10 libras, lo que es igual a 4.53 kg. El radio de rotación en
elevación y en azimut será de 1 cm, el cual es una medida estándar de polea para rotor en
muchos motores paso a paso. Asumiendo que la fuerza de la gravedad será de 9.8 𝑚/𝑠2 y un
factor de seguridad del 20%, el torque mínimo del motor sería el siguiente:
𝑇[𝑁𝑚] = 1.2 × 𝑀[𝑘𝑔] × 𝑅[𝑚] × 𝑔 = 1.2 × 4.53 𝑘𝑔 × 0.01 𝑚 × 9.8 𝑚/𝑠2
𝑇[𝑁𝑚] = 0.5327 𝑁𝑚 = 53.27 𝑁𝑐𝑚
Con este dato, asumimos que cualquier motor que se aproxime o supere este torque
podrá mover el motor tanto en azimut como en elevación.
Para mover el motor en elevación se seleccionó un NEMA 17, el cual tiene un torque
de 59 Ncm y ángulo de paso de 1.8º. Para el motor de azimut se selecciona un NEMA 23, el
cual tiene un torque de 126 Ncm también con un ángulo de paso de 1.8º. El motor de azimut
se adquirió más potente para soportar el peso de la estructura de soporte de la antena, la cual
no pesará más de 2 libras. En la figura 27 se aprecian ambos motores mientras que en la
figura 28 se aprecian los demás dispositivos utilizados. Las hojas de datos de estos motores
se incluyen en los apéndices B y C.
Figura 27. Motor NEMA 17 (Izquierda). Motor NEMA 23 (Derecha) [Imagen
Propia].

77 de 139
Los drivers utilizados para estos motores son el Mysweety TB6600 y el Smakn
TB6600. Se han usado estos modelos porque son los recomendados por el fabricante para el
NEMA 17 y el NEMA 23, respectivamente, pero se podría usar dos unidades de cualquiera
de estos dos debido a que cumplen con las limitaciones del diseño. El NEMA 17 consume 2
amperes mientras que el NEMA 23 consume 2.8 amperes, debido a que ambos drivers pueden
suministrar hasta 4 amperes y tienen las mismas conexiones, son perfectamente funcionales.
Adicionalmente se incluyen 2 interruptores de límite, los cuales servirán para posicionar al
sistema en un origen desde el que se partirá con 0º de elevación y 0º grados de azimut. Todos
estos dispositivos pueden verse en la figura 28
Figura 28. a) Arduino UNO, suficiente para mover dos los dos motores. b) Driver
SMAKN TB6600 para el motor de azimut. c) Driver MYSWEETY TB6600 para el motor
de elevación. d) Interruptores de límite [Imagen Propia].

78 de 139
3.1.3 Software Arduino
Para el sistema del punto 3.1.2 funcione se necesita que el programa del
microcontrolador Arduino pueda ejecutar de forma paralela los movimientos de ambos
motores. Normalmente, se utiliza un microcontrolador para administrar las acciones de un
sistema embebido, con lo que se utilizaría un microprocesador para comandar las acciones
de los distintos microcontroladores. Sin embargo, utilizando un poco de abstracción, se llegó
a la conclusión de que los dispositivos conductores (drivers) utilizados en este diseño realizan
una función básica de un microcontrolador que es el realizar acciones a demanda de otro
dispositivo ya que realizan un paso en los motores cada vez que se produce un pulso en la
entrada. Con esto, se podrá diseñar una estructura de programación en la que coloque en
secuencia una serie de pasos en dos motores comandadas con dos salidas del Arduino.
Dentro de los datos suministrados por el programa Gpredict tenemos el intervalo de
tiempo en el que el satélite surca el cielo sobre el territorio donde se ha situado la base,
tenemos los distintos niveles de elevación respecto al tiempo hasta llegar a una elevación
máxima, junto con la trayectoria del azimut.
Primer acercamiento:
El primer acercamiento de programación está basado en el análisis de la figura 29.
Esta figura es una simulación en la que dos motores realizan pasos de distintos tamaños en
un tiempo de 20 segundos. El motor de elevación realiza un paso cada 3 segundos mientras
que el de azimut lo realiza cada 5 segundos. Se necesita que ambos motores ejecuten pasos
según un cierto intervalo y que a la vez esta dinámica sea administrada embebido.
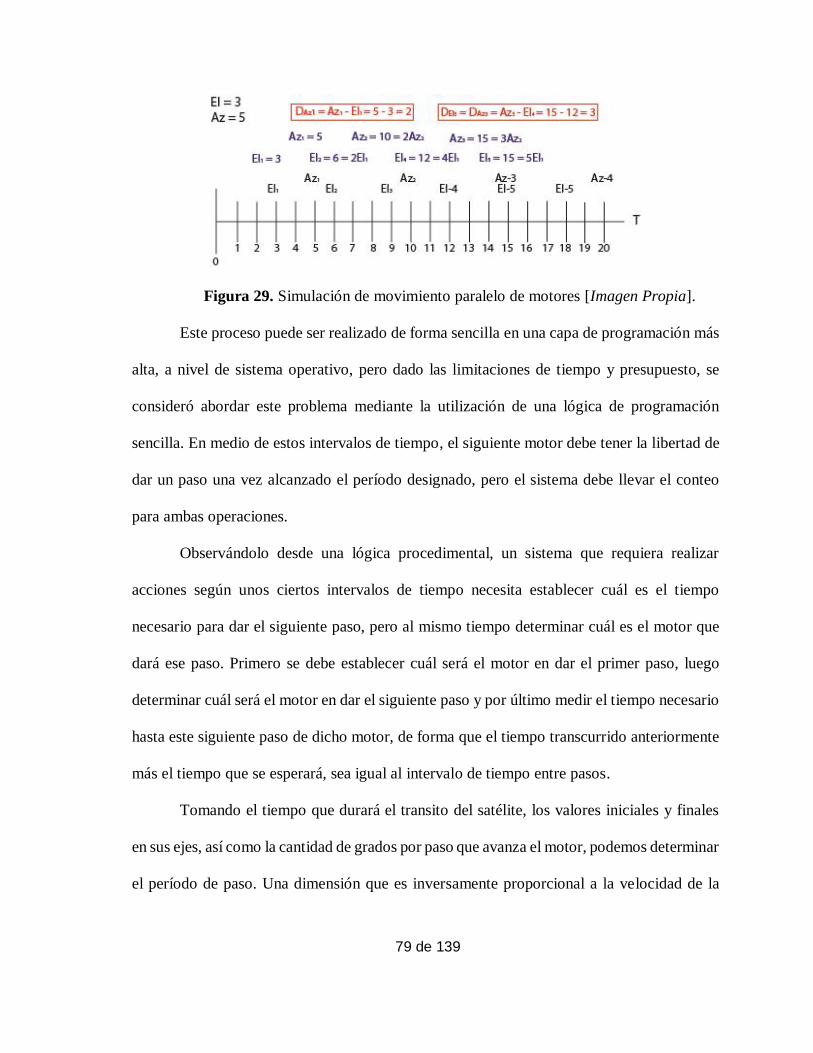
79 de 139
Figura 29. Simulación de movimiento paralelo de motores [Imagen Propia].
Este proceso puede ser realizado de forma sencilla en una capa de programación más
alta, a nivel de sistema operativo, pero dado las limitaciones de tiempo y presupuesto, se
consideró abordar este problema mediante la utilización de una lógica de programación
sencilla. En medio de estos intervalos de tiempo, el siguiente motor debe tener la libertad de
dar un paso una vez alcanzado el período designado, pero el sistema debe llevar el conteo
para ambas operaciones.
Observándolo desde una lógica procedimental, un sistema que requiera realizar
acciones según unos ciertos intervalos de tiempo necesita establecer cuál es el tiempo
necesario para dar el siguiente paso, pero al mismo tiempo determinar cuál es el motor que
dará ese paso. Primero se debe establecer cuál será el motor en dar el primer paso, luego
determinar cuál será el motor en dar el siguiente paso y por último medir el tiempo necesario
hasta este siguiente paso de dicho motor, de forma que el tiempo transcurrido anteriormente
más el tiempo que se esperará, sea igual al intervalo de tiempo entre pasos.
Tomando el tiempo que durará el transito del satélite, los valores iniciales y finales
en sus ejes, así como la cantidad de grados por paso que avanza el motor, podemos determinar
el período de paso. Una dimensión que es inversamente proporcional a la velocidad de la

80 de 139
rotación. Si la velocidad de la rotación se mide en pasos por segundo, esta magnitud se mide
en segundos por paso y se determina de la siguiente forma.
𝜌 =𝑡
[ 𝜃𝑓 − 𝜃𝑖
𝑆𝛽]
En esta ecuación 𝜌 es nuestro período de paso y se mide en s/p (segundos por paso);
𝑡 simboliza el tiempo que dura el paso del satélite por el espacio aéreo de nuestra ciudad y se
mide en segundos, 𝜃𝑖 y 𝜃𝑓 son los ángulos inicial y final entre los que deberá inclinarse la
antena y se miden en grados sexagesimales y 𝑆𝛽 es la cantidad de grados que gira un solo
paso del motor en la forma que lo hemos colocado, lo cual se mide en grados sobre paso.
Restar el desplazamiento inicial al final nos dará el desplazamiento total, y nos advierte que
la antena deberá estar ubicada en el punto inicial al momento de iniciar la trayectoria por lo
que nuestro programa deberá posicionar la antena en este ángulo como una de sus primeras
tareas. Luego se divide este desplazamiento angular entre la cantidad de grados que avanza
el motor en un solo paso, obteniendo la cantidad de pasos necesarios para mover el motor
hasta este ángulo. Por último, se divide el tiempo que tarda el recorrido entre esta cantidad
de pasos para obtener cuál es el intervalo de tiempo que debe haber entre cada paso del motor
para seguir el satélite en su trayectoria.
Esta visualización del problema resultó útil para tener un entendimiento bastante
acertado del movimiento de los motores, pero como puede verse en la figura 30, no cumple
estrictamente con la función de desplazamiento de los ejes. En lugar de esto, se comporta
como una recta lineal mientras que las funciones de desplazamiento se comportan más como
curvas exponenciales. Sin embargo, su similitud permitirá que el equipo pueda desarrollar
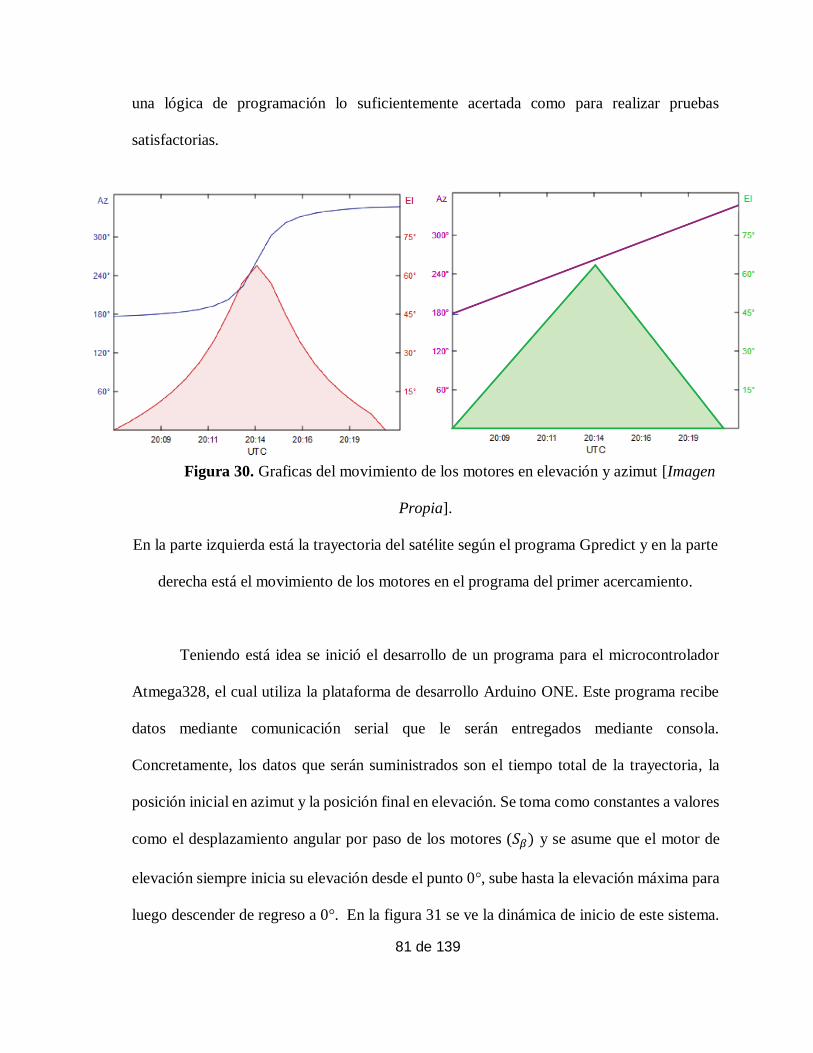
81 de 139
una lógica de programación lo suficientemente acertada como para realizar pruebas
satisfactorias.
Figura 30. Graficas del movimiento de los motores en elevación y azimut [Imagen
Propia].
En la parte izquierda está la trayectoria del satélite según el programa Gpredict y en la parte
derecha está el movimiento de los motores en el programa del primer acercamiento.
Teniendo está idea se inició el desarrollo de un programa para el microcontrolador
Atmega328, el cual utiliza la plataforma de desarrollo Arduino ONE. Este programa recibe
datos mediante comunicación serial que le serán entregados mediante consola.
Concretamente, los datos que serán suministrados son el tiempo total de la trayectoria, la
posición inicial en azimut y la posición final en elevación. Se toma como constantes a valores
como el desplazamiento angular por paso de los motores (𝑆𝛽) y se asume que el motor de
elevación siempre inicia su elevación desde el punto 0°, sube hasta la elevación máxima para
luego descender de regreso a 0°. En la figura 31 se ve la dinámica de inicio de este sistema.

82 de 139
Primero se piden estos datos, luego se realizan los procesos de cálculo de desplazamiento,
luego se verifica y asegura que la antena esté en el punto 0°,0°, después se desplaza hasta el
azimut inicial y por último se espera hasta que se indique la orden de iniciar el
desplazamiento.
Figura 31. Diagrama del inicio del movimiento del programa de movimiento [Imagen
Propia].
El sistema debe permanecer en espera hasta que se ordene el iniciar movimiento, esto
se realizará de esta forma para agilizar el proceso de diseño, pero puede solucionarse este
problema de muchas maneras, como iniciar las horas en las que se inician estos
desplazamientos y dotar al sistema de un método para determinar la hora. Luego de indicado

83 de 139
el movimiento, se requiere que el sistema inicie su desplazamiento según uno de los 3
posibles caminos. Estos caminos de desplazamiento solo toman en cuenta cuál de los
períodos de desplazamiento 𝜌 necesita más atención. Si 𝜌𝑎𝑧 (o Vaz) es mayor a 𝜌𝑒𝑙 (o Vez)
se elige un camino, si sucede lo opuesto se elige otro camino y si son iguales se utiliza otro
desplazamiento. En la figura 32 se observa un diagrama de flujo en el que se detalla esta
lógica. A su vez, en las figuras 33, 34, y 35 se observa con detalle la lógica seguida para
realizar el desplazamiento de los dos motores según el tamaño de sus períodos de
desplazamiento.
Figura 32. Diagrama de flujo de la selección de camino de desplazamiento [Imagen
Propia].

84 de 139
Figura 33. Flujo del programa cuando Vel es menor que Vaz [Imagen Propia].

85 de 139
Figura 34. Flujo del programa cuando Vel es mayor que Vaz [Imagen Propia].

86 de 139
Figura 35. Flujo del programa cuando Vel es igual que Vaz [Imagen Propia].
El software para lenguaje Arduino puede consultarse en el apéndice A de este documento.

87 de 139
3.2 Construcción de antenas
3.2.1 Antena de cruzado doble
La frecuencia de construcción de esta antena es 137.5442 MHz. Obtenida la frecuencia
de construcción se calcula la longitud de onda.
𝜆 =𝑐
𝑓=
3 × 108 m/s
137.5442 × 106 Hz= 2.1811 𝑚
𝜆
2=
2.1811 𝑚
2= 1.0905 𝑚
𝜆
4=
2.1811 𝑚
4= 54.54 𝑚
𝜆
8=
2.1811 𝑚
8= 27.26 𝑚
Con estas dimensiones se puede iniciar el proceso de construcción de la antena. Partimos
del diseño con los siguientes requisitos:
1. Los 4 dipolos deberán tener una longitud total de media longitud de onda, es decir, 1
metro con 9 centímetros.
2. Cada monopolo deberá tener una longitud de un cuarto de longitud de onda, es decir
54.54 cm.
3. El dipolo debe tener 180° entre monopolos.
4. La separación de alimentación (gap) entre monopolos será de 2 cm.
5. Cada monopolo debe estar a 90° del anterior en el eje X-Y.
6. La separación entre dipolos deberá de ser igual a un cuarto de longitud de onda.
7. En ángulo de los dipolos con la vertical debe ser de 30° hacia la izquierda.

88 de 139
Soporte:
El material de soporte elegido es el PVC, normalmente conocido como el plástico
común de tuberías, con un calibre de 2 pulgadas. El elemento central de soporte que se usará
será una unión de 5 vías de PVC para diámetros de dos pulgadas. Como se aprecia en la
figura 36, esta unión tiene 4 salidas a 90° cada una cumpliendo el 5to requerimiento del
diseño. El elemento de soporte de los dipolos será una unión de 3 salidas tipo T de PVC (ver
figura 36). Esta unión tiene 2 salidas a 180° y una a 90°. Con esto, se podrá colocar los
monopolos en las salidas a 180° y conectar la salida a 90° con el elemento de soporte central.
Con lo que se cumple el 3er requerimiento del diseño.
Figura 36. Unión de 5 vías (izquierda) y unión de 3 vías tipo T (derecha) [Imagen Propia].
Debido a que el elemento de soporte se ubicará en el centro de estos dipolos, los
dipolos estarán separados a un octavo de longitud de onda del centro, es decir, 27.26 cm.
Para unir el dipolo con el elemento central, se procede a recortar un tubo de PVC con un
tamaño de un tamaño de 27.26 cm. Al unir el tubo con el elemento central, el elemento de
dipolo y medir desde el centro del elemento central hasta el centro del elemento de dipolo,
se encontró que el tamaño había aumentado a 29 cm, lo que sucede porque las uniones tienen

89 de 139
toques que limitan la profundidad a la que puede llegar la tubería que se le introduce, por lo
que es necesario recortar el tubo hasta que la unión de los 3 elementos cumpla con la longitud
de 27.26 cm del 6to requerimiento de diseño, como se muestra en la figura 37.
Figura 37. Tamaño de la distancia del dipolo al centro [Imagen Propia].
Dipolos.
Para la construcción de los dipolos se utilizó una tubería de aluminio de un diámetro
de 1cm. Cumpliendo con los requisitos de construcción 1, 2 y 4, se procede recortar 8 tuberías
de aluminio con una longitud de 53.54 cm. Esta dimensión resulta de restar a la longitud ideal
de 1/4 de longitud de onda, la mitad de la longitud de la separación física entre monopolos,
como se muestra de la siguiente ecuación:
𝐿𝑚2 = 𝐿𝑚1 −𝑔𝑎𝑝
2= 54.54 𝑐𝑚 −
2cm
2= 53.54 cm
Una vez cortados monopolos, se procede a remachar terminales eléctricos machos en
uno de los extremos de estos monopolos con el fin de poder conectar los cables de
alimentación a los mismos. En la figura 38 se puede observar dichos terminales eléctricos y
cómo se colocó estos terminales a los monopolos.

90 de 139
Figura 38. De izquierda a derecha: conector eléctrico macho, conector eléctrico hembra y
monopolos con conectores de cobre machos remachados [Imagen Propia].
A la hora de colocar los monopolos en el interior de la unión tipo T, se encontró el
problema de que el diámetro de la unión era mucho mayor al diámetro del monopolo, por tal
razón se procedió a realizar una pieza de madera que adaptaría ambos diámetros para colocar
el monopolo en el centro. En la figura 39 se observa dicha diferencia entre diámetros y las
dimensiones de la pieza de madera construida. Fue necesario hacer 8 de estas piezas para los
8 monopolos.
Figura 39. Dimensiones de la pieza de ajuste de monopolo a unión T [Imagen Propia].
Al terminar de colocar los monopolos en la unión T, se procede a pegar y sellar todos
los elementos con pegamento para tuberías, solo se deja despegado (pero bien sujetas) las
uniones entre los elementos de soporte para poder realizar ajustes. De esta forma la unión T
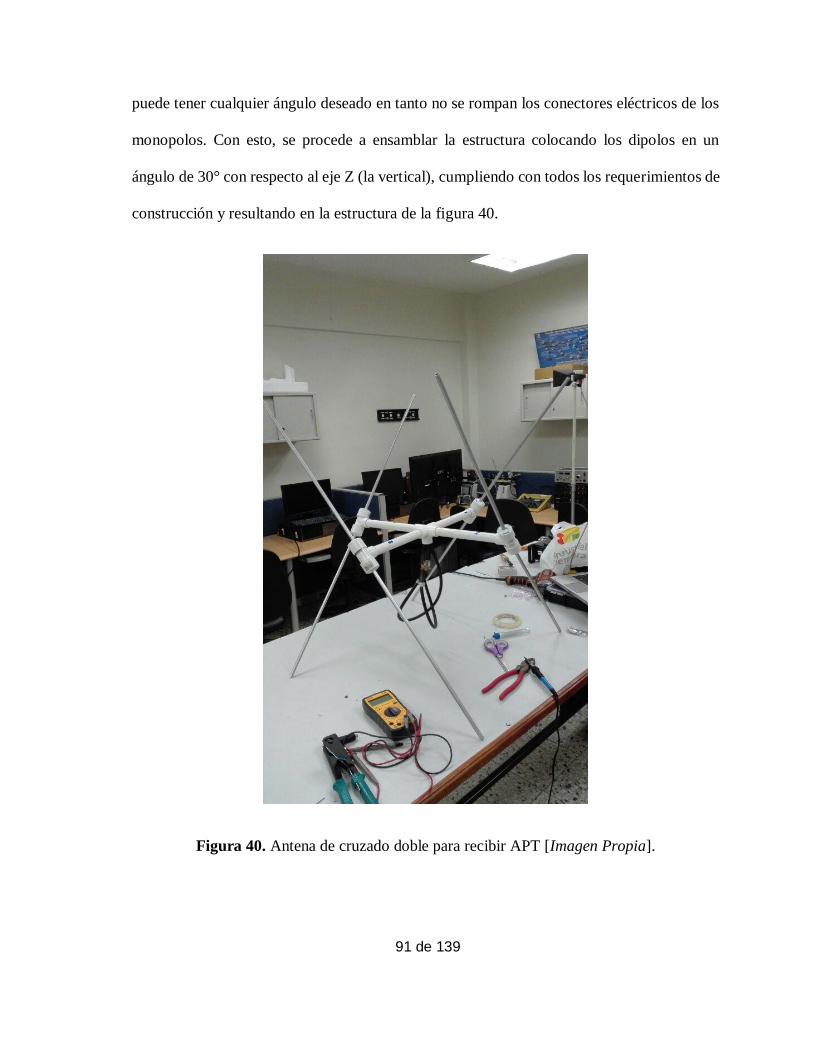
91 de 139
puede tener cualquier ángulo deseado en tanto no se rompan los conectores eléctricos de los
monopolos. Con esto, se procede a ensamblar la estructura colocando los dipolos en un
ángulo de 30° con respecto al eje Z (la vertical), cumpliendo con todos los requerimientos de
construcción y resultando en la estructura de la figura 40.
Figura 40. Antena de cruzado doble para recibir APT [Imagen Propia].

92 de 139
Por supuesto, el cableado de esta antena, debe seguir un esquema de conexión como el que
se detalló inicialmente. En la figura 41 se puede apreciar un esquema de conexión
desarrollado por el ingeniero Gerald Martes.
Figura 41. Conexión de los dipolos de la antena de cruzado doble [24].

93 de 139
En esta figura se puede apreciar que cada dipolo está conectado un cable coaxial en el
cual el centro de cobre está conectado al monopolo superior mientras que la malla del cable
se conecta al monopolo inferior. Es de notar que antes de conectar el cable al dipolo, se coloca
una ferrita toroidal cuyo propósito es el de ayudar al filtrado de las bajas frecuencias dentro
del cable.
3.2.2 Antena Yagi circular
De las antenas Yagi mostradas en el apartado 2.4, la antena Yagi D, la cual tiene
una impedancia de 63.14 + j19.22 ohms según la simulación, esta impedancia se acerca
mucho a los 75 ohms del cable coaxial con el que se planea conectar al recibidor. Las
dimensiones de la antena son las siguientes:
Tabla 11. Tabla de longitud y posición de los elementos de la Yagi D
Elemento Longitud de elementos
Yagi D(mm)
Posición D de elementos
respecto al reflector (mm)
Reflector 88.1 0
Radiador 82 40.8
D1 81.0 55.2
D2 80.0 85.6
D3 79.1 123.8
D4 78.3 168.9
D5 77.5 217.3
D6 76.6 269.6
D7 76.2 323.9
D8 75.7 388.6
D9 75.0 444.5

94 de 139
D10 74.2 518.9
D11 74.0 576.4
D12 73.3 637.2
D13 72.8 707.4
D14 72.4 783.8
D15 72.3 862.7
Para el cálculo de estas antenas se estableció que el boom de soporte de los elementos
debía tener un diámetro de 10 mm o 1 cm. Esta medida se estableció previamente para utilizar
una barra de aluminio comercial de dicho diámetro. Esta barra tiene un balance entre rigidez
y maleabilidad que permite hacer una antena de longitudes de hasta 2 metros sin que se curve
o deforme, es la misma barra utilizada para los monopolos de la antena de cruzado doble. A
su vez, se decidió el uso de elementos directores de 2 mm de diámetro para poder utilizar
electrodos de bronce, los cuales son buenos conductores y a la vez tienen gran rigidez.
Figura 42. Perforación de los agujeros en la Yagi [Imagen Propia].

95 de 139
En la figura 42 se puede ver cómo se realizan los agujeros a la barra de aluminio
usando un taladro de base. Es necesario hacerle la misma cantidad de agujeros nuevamente
a 90 grados, con una separación de 5 mm por encima de los primeros para no coincidir en
ningún agujero. Luego se traspasan los electrodos cortados a las dimensiones de longitud que
ordena la tabla 11 y por último se deben soldar estos elementos a la barra de aluminio para
que exista conductividad entre todos los elementos. Los radiadores en polarización horizontal
y vertical se colocan dentro de un recuadro de acrílico como se puede ver en la figura 43 para
que estén aislados y puedan ser irradiados apropiadamente por los elementos directores.
Figura 43. Antena Yagi D de dos polarizaciones [Imagen Propia].

96 de 139
Para realizar la conexión (alimentación) de la antena, se utiliza el esquema de la figura 44.
Figura 44. Conexión de elementos radiadores en Yagi de polarización RHCP [25].
Dado que la frecuencia es 1702.5 MHz, la longitud de onda está dada:
𝜆 =𝑐
𝑓=
3 × 108 𝑚/𝑠
1702.5 × 106 𝑀𝐻𝑧= 0.17621 𝑚 = 176.21 𝑚𝑚
Entonces una cuarta parte de longitud de onda (1/4) es 44.05 mm, pero como esta
dimensión es muy pequeña respecto a la dimensión de la antena, se decide utilizar
propiedades de la guía de ondas, para aumentar el cableado de las alimentaciones en media
longitud de onda (88.1 mm). Con lo que la longitud del elemento de desfase pasaría de una
cuarta parte de longitud de onda a 3/4 de longitud de onda (132.15 mm), pero de la misma
forma, hay que extender la conexión de los elementos en fase por media longitud de onda
para que las señales captadas en ambas polarizaciones se encuentren en el mismo ciclo.
Adicionalmente, estas dimensiones se deben multiplicar por un factor de velocidad en el

97 de 139
cable que depende del tipo de cable que se utilizará para hacer esta conexión. Debido a que
se utilizará un cable RG316 para hacer este cuadrado, estas dimensiones deben multiplicarse
por un factor de velocidad de 0.79, lo que nos resulta en dimensiones de 104.40 mm y 69.6
mm para el elemento de desfase y la conexión de los elementos en fase, respectivamente.
3.3 Obtención de señal
3.2.1 Señal APT
Para recibir la señal APT se colocó la antena de doble cruzado en la base sobre el
edificio 2 del campus de ingeniería y se obtuvo el espectro de la figura 45 durante el paso
del satélite NOAA 19.
Figura 45. Señal del NOAA 19 [Imagen Propia].
Lo primero que se observa es que el piso de ruido eléctrico está en los -60 dBm, lo
cual significa que la antena se encuentra en un ambiente muy cargado eléctricamente. En los

98 de 139
distintos intentos de recepción realizados, la señal recibida resultó ser pobre y afectada por
el ruido. En las figuras 46 y 47 se encuentra un archivo de imagen recuperado en el cual logra
se logra distinguir la silueta de la isla de Santo Domingo y la cobertura nubosa que
sobrevolaba la isla el día 2 de noviembre de 2017 a las 7:00 pm (hora local).
Figura 46. Imagen APT, canal A [Imagen Propia].
La baja calidad de esta señal se debió a la gran cantidad de ruido eléctrico que se
encontró en el ambiente. Al explorar el espectro, se encontró que existen múltiples emisoras
de FM irradiando una gran potencia al ambiento, lo cual causa un ruido eléctrico tan alto que
nuestro RTL-SDR tiene problemas para distinguir patrones en la señal. Se encontró que la
radio policial y taxista de la zona, estaba operando en los 140 MHz, muy cerca de la banda
de señal de nuestro sistema APT, lo cual podría interferir en la demodulación de la señal.
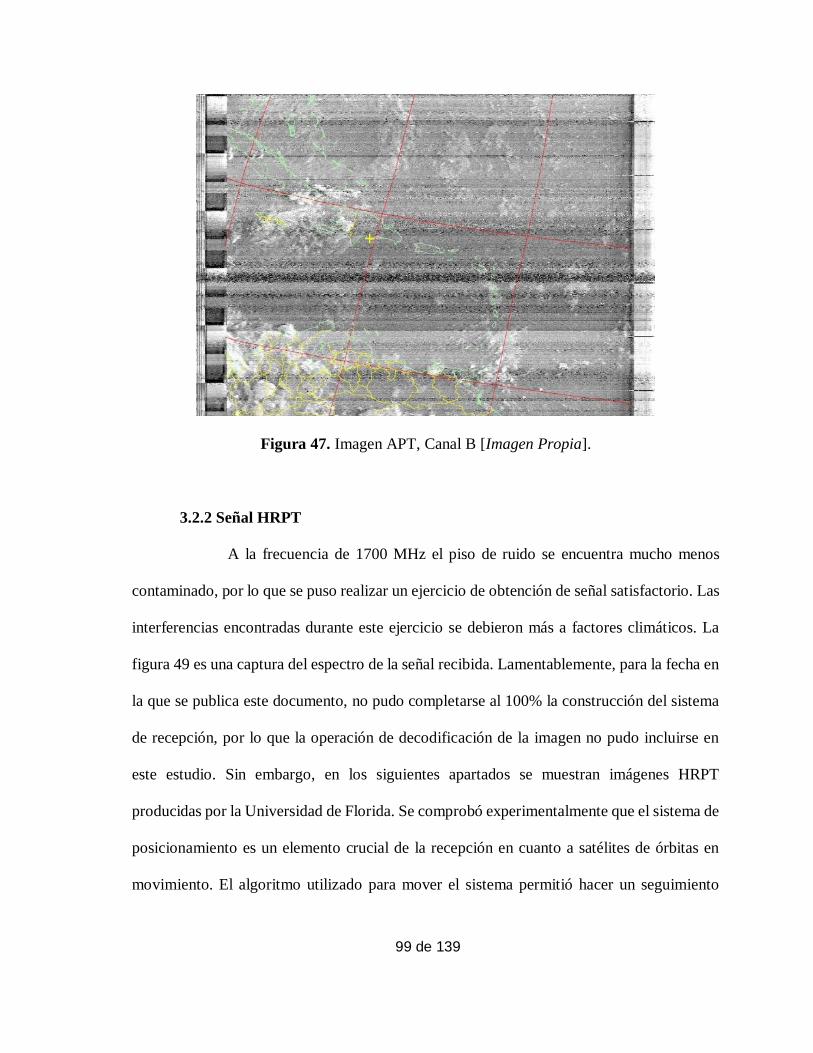
99 de 139
Figura 47. Imagen APT, Canal B [Imagen Propia].
3.2.2 Señal HRPT
A la frecuencia de 1700 MHz el piso de ruido se encuentra mucho menos
contaminado, por lo que se puso realizar un ejercicio de obtención de señal satisfactorio. Las
interferencias encontradas durante este ejercicio se debieron más a factores climáticos. La
figura 49 es una captura del espectro de la señal recibida. Lamentablemente, para la fecha en
la que se publica este documento, no pudo completarse al 100% la construcción del sistema
de recepción, por lo que la operación de decodificación de la imagen no pudo incluirse en
este estudio. Sin embargo, en los siguientes apartados se muestran imágenes HRPT
producidas por la Universidad de Florida. Se comprobó experimentalmente que el sistema de
posicionamiento es un elemento crucial de la recepción en cuanto a satélites de órbitas en
movimiento. El algoritmo utilizado para mover el sistema permitió hacer un seguimiento

100 de 139
efectivo, pero la potencia de la señal llegó a disminuir en varios momentos, lo cual significa
que la función de movimiento debe refinarse un poco más.
Figura 48. Espectro de la señal HRPT del NOAA 18 [Imagen Propia].

101 de 139
3.4 Comparación de Imágenes
3.4.1 Imágenes APT
En cuanto a la imagen APT, en la figura 50 pueden ver una comparativa entre una de
las imágenes decodificadas en este estudio y una recepción proveída por la EMA de
Tortuguitas en Buenos Aires, Argentina [32].
Figura 49. Comparación de imágenes APT [Imagen Propia].
A la izquierda, la imagen recibida en la investigación y en la parte derecha, la imagen
proveída por el EMA.
Como puede observar en la figura 49, en la imagen de la derecha se pueden distinguir
las formas de las nubes así como los tonos de sincronización. En la imagen de la izquierda
se aprecia mucho más detalle, pero las características de recepción de este sistema son mucho
más avanzadas. La imagen recibida, aunque no tiene tanto detalle como la imagen proveída,
es una prueba de que el mecanismo de recepción es exitoso y sólo necesita aplicar
mecanismos de filtrado y ajuste de ganancia.

102 de 139
3.4.1 Imágenes HRPT
Debido a que el sistema de recepción no pudo ser completamente construido a la
fecha de elaboración de este documento, no pudo incluirse la prueba de decodificación Sin
embargo, en la figura 51 se anexa una imagen recibida por la Universidad de Florida durante
el paso del satélite NOAA 19 el 24 de noviembre de 2017 [33]. En esta imagen se puede
observar una clara distinción de las formas de las nubes con una resolución espacial mucho
más amplia que la de la figura 50. Mientras que en la figura 49 el territorio de la república
dominicana apenas se distingue, en la figura 51 se cuenta con una mayor cobertura. Inclusive,
pueden distinguirse detalles del relieve como los grandes ríos, el Lago Enriquillo y pequeñas
islas.
Figura 50. Imagen HRPT obtenida durante el paso del NOAA 19 a la 7:00 pm del viernes
24 de noviembre de 2017 [33].
103 de 139
Conclusiones
Una vez concluido el estudio de la construcción de un Sistema de Recepción de
Imágenes Satelitales utilizando Radio Definida por Software, se pudo hacer las siguientes
aseveraciones:
En relación con el primer objetivo: “Determinar la estructura de un sistema de
análisis de imágenes satelitales”, en el apartado 2.6 se detallaron los componentes
necesarios para enlazar con los satélites NOAA POES y obtener la imagen digital
que transmite. En el transcurso de esta investigación fue planteado el diseño y
construcción de los diferentes elementos que componen dicho esquema, obteniendo
como resultando la captura de información y producción de imágenes satelitales.
En relación con el segundo objetivo: “Diseñar y construir las antenas apropiadas
para la buena captura de la señal satelital en la banda de VHF (para imágenes de
baja resolución) y para la banda de UHF (para imágenes de alta definición)”, la
captura realizada mediante la antena de cruzado doble presenta un alto índice de
factibilidad, puesto que su construcción e implementación son relativamente
sencillas y las imágenes capturadas presentan una calidad aceptable bajo las
condiciones atmosféricas y de radiación electromagnética normales. Aunque la
eficiencia de la recepción fue afectada por un alto índice de ruido eléctrico, se pudo
obtener una imagen con la información suficiente para obtener datos sobre el clima
de la región. Con respecto a la adquisición de imágenes en Alta Definición, la
antena Yagi de polarización circular presenta gran eficiencia, que se complementa
con el sistema de control de posición para brindar datos confiables. La antena Yagi
de polarización circular fue un gran descubrimiento durante este desarrollo, esta

104 de 139
antena contó con la ganancia suficiente para dotar a la señal del nivel necesario para
sobresalir por encima del piso de ruido.
En relación con el tercer objetivo: “Diseñar y construir el sistema de seguimiento
satelital”, fue comprobado que el sistema de seguimiento posee el torque
necesario para mover esta estructura sin ningún tipo de inconvenientes suficientes
para mover antenas de hasta 10 libras con un sistema de control estable. Destaca
por su versatilidad, gracias a que los parámetros de los motores paso a paso son
reconfigurables, de forma que se adapten a las necesidades de cada individuo. A
su vez, el Algoritmo utilizado para el control de movimiento fue puesto a prueba
en varias ocasiones, de manera que se pudo corregir y depurar el código, a fin de
lograr el funcionamiento deseado, pero resaltó la importancia de un seguimiento
más preciso del satélite, que se asemeje más a la gráfica de movimiento en
concordancia de los puntos de anclaje proveídos por el programa y que a su vez
inicie su movimiento lo más en consonancia con el paso del satélite.
En relación con el cuarto objetivo: “Diseñar y construir el sistema de
computación para la recomposición de la señal satelital en una imagen”, los
programas de decodificación utilizados, WXtoIMG y HRPT Reader, fueron
suficientes para realizar las operaciones de composición y procesado de las
imágenes de alta y baja resolución.
En conclusión, la investigación fue fructuosa al desarrollar un material que abarca
las etapas del diseño y construcción de un sistema de obtención de imágenes satelitales en
el que se exponen las distintas fuentes de imágenes, sus características, los componentes
necesarios para su captura y el proceso para fabricar u obtener dichos componentes.

105 de 139
Recomendaciones
Considerando que la importancia de esta investigación radica en la obtención de una
plataforma que apoye el desarrollo de proyectos orientados al análisis de datos de
telemedición y en función de los resultados obtenidos, se facilita la formulación de
sugerencias que podrían ser seguidas tanto por el personal administrativo como por los
docentes y alumnos de esta comunidad educativa:
1) La recepción puede mejorarse implementando las siguientes modificaciones:
a. Diseñar sistemas de filtrado en el dominio análogo o de preferencia en el
dominio digital con tal de minimizar los efectos provocados en el piso de
ruido cerca de la frecuencia de la transmisión APT.
b. Utilizar elementos de línea de transmisión para ajustar la impedancia de las
antenas de forma que se logre una máxima transferencia de potencia.
c. Implementar aplicativos en GNU Radio para mejorar el proceso de
sintonización de los satélites.
d. Realizar mejoras en la programación del código utilizado para el movimiento
de los motores de forma que se realice un mejor seguimiento de la trayectoria
del satélite.
2) Desarrollar proyectos de investigación que intenten adaptar el sistema actual para
recibir imágenes de otros proyectos satélites que realicen estudios
medioambientales o climatológicos que sobre vuelen la zona del caribe.
3) Explorar la utilización del procesamiento digital de imágenes para el análisis de
las imágenes satelitales recibidas.

106 de 139
4) Establecer vías de comunicación con universidades de Venezuela para guiar el
aprovechamiento de las imágenes del satélite Miranda en futuros estudios.

107 de 139
Referencias Bibliográficas
[1] R. Serway y J. Jewett, Physics for Scientists and Engineers. Boston, MA, USA:
Brooks/Cole Cengage Learning, 2014.
[2] W. Tomasi, Sistemas de Comunicaciones Electrónicas, Ed. 4. Phoenix, AZ,
USA: DeVry Institute of Technology, 2003.
[3] J. Seybold, Introduction to RF Propagation. Hoboken, NJ, USA: John Wiley &
Sons, 2005.
[4] Nomenclature of the frequency and wavelengh bands used in
telecommunications. Recommendation ITU-R V.431-8, 2015.
[5] IEEE Standard Letter Designations for Radar-Frequency Bands. IEEE Std 521-
2002.
[6] Request for approval of the NATO joint civil/military frequency agreement
(NJFA) 2002.
[7] E. Conway, Introduction to satellite image interpretation. Baltimore, MD,
USA: The Johns Hopkins University Press, 1997.
[8] T. Lillesand y R. Kiefer, Remote Sensing and Image Interpretation. Ed. 7.
Hoboken, NJ, USA: John Wiley & Sons, 2015.
[9] N. Short, “Sensor Technology”, The Remote Sensing Tutorial, 2017. [Online].
Available: https://goo.gl/CZf2ZW. [Accesed: Jul, 7, 2017]
[10] A. Saraf, “What is a remote sensing image and how it is represented”, in
Course: Digital Image Processing of Remote Sensing Data.[Online]. Available:
https://goo.gl/TGmVx6. [Accesed: Jul, 7, 2017]

108 de 139
[11] “List of Earth observation satellites”, Wikipedia, 2017. [Online]. Available:
https://goo.gl/rDwmHk. [Accesed: 20-Oct-2017]
[12] “SPOT (Satellite Pour l'Observation de la Terre)”, EOEdu, 2017. [Online].
Available: http://eoedu.belspo.be/en/satellites/spot.htm [Accesed: 20-Oct-2017]
[13] “Pleiades-HR (High-Resolution Optical Imaging Constellation of CNES)”,
eoPortal Directory, 2017. [Online]. Available: https://goo.gl/75qAg4.
[Accesed: 20-Oct-2017]
[14] “Landsat program”, Wikipedia, 2017. [Online]. Available:
https://en.wikipedia.org/wiki/Landsat_program. [Accesed: 20-Oct-2017]
[15] J. Schmaltz, “Fires in the Dominican Republic and Haiti”, Visible Earth, 2005.
[Online]. Available: https://goo.gl/Zd1uHR. [Accesed: 21-Oct-2017]
[16] J Maurer, “Overview of NASA's Terra satellite”, Hawaii University, 2001.
[Online]. Available: http://www2.hawaii.edu/~jmaurer/terra. [Accesed: 22-Oct-
2017]
[17] K. Kidwell et al., NOAA KLM User’s Guide with NOAA-N, N Prime, and
MetOp Supplements. Asheville, NC, USA: NOAA, 2014. [Online]. Available:
https://goo.gl/hm4vNJ. [Accesed: 22-Oct-2017]
[18] “VRSS-1 (Venezuelan Remote Sensing Satellite-1) / Francisco de Miranda”,
eoPortal Directory, 2017. [Online]. Available: https://goo.gl/yda2br. [Accesed:
20-Oct-2017]
[19] P. Closas et al., “Casting Signal Processing to Real-Word Data”, in Satellite
and Terrestrial Radio Positioning Techniques - A Signal Processing

109 de 139
Perspective, 2012, D. Dardari and M. Louise, Eds. Elsevier pp. 407-409.
[Online]. Available: https://goo.gl/Ktw3s8. [Accesed: 23-Oct-2017]
[20] Realtek, “RTL2832U: DVB-T COFDM Demodulator + USB 2.0”, 2017.
[Online]. Available: https://goo.gl/ix2MQn. [Accesed: 23-Oct-2017]
[21] Rafael Micro, “R820T: High Performance Low Power Advanced Digital TV
Silicon Tuner Datasheet”, 2011. [Online]. Available: https://goo.gl/4Btqcf.
[Accesed: 23-Oct-2017]
[22] “History and Discovery of RTLSDR”, RTL SDR.org Wiki, 2016. [Online].
Available: https://goo.gl/2GQ6Xi. [Accesed: 23-Oct-2017]
[23] NooElec, “NooElec NESDR Mini SDR & DVB-T USB Stick (RTL2832 +
R820T) w/ Antenna and Remote Control”, 2014. [Online]. Available:
https://goo.gl/CcVWX6. [Accesed: 23-Oct-2017]
[24] G. Martes, “Double Cross: A NOAA Satellite Downlink Antenna”,
W7DBO.net, 2008. [Online]. Available: https://goo.gl/dVCiyA. [Accesed: 5-
Sep-2017]
[25] C. Balanis. “Traveling Wave and Broadband Antennas”, in Antenna Theory:
Analysis and Design, 2016, pp. 533-590.
[26] P. McMahon, “YagiCAD”, 2017. [Online]. Available: https://goo.gl/6Szb9v.
[Accesed: 10-Oct-2017]
[27] J. Drew, “Yagi Calculator: DL6WU style yagis for VHF/UHF”, 2015. [Online].
Available: http://www.vk5dj.com/yagi.html. [Accesed: 10-Oct-2017]

110 de 139
[28] A. Csete, “Gpredict: Free, Real-Time Satellite Tracking and Orbit Prediction
Software”, 2016. [Online]. Available: http://gpredict.oz9aec.net. [Accesed: 10-
Oct-2017]
[29] “What is GNU Radio?”, The GNU Radio Foundation, 2017. [Online].
Available: https://www.gnuradio.org/about/. [Accesed: 10-Oct-2017]
[30] C. Anderson, “WXtoImg: The world's best weather satellite (WXsat) signal to
image decoder”, WXtoImg Foundation, 2017. [Online]. Available:
http://www.wxtoimg.com. [Accesed: 10-Oct-2017]
[31] D. Taylor, “HRPT Programs”, SatSignal, 2016. [Online]. Available:
http://www.satsignal.eu/software/hrpt.htm [Accesed: 10-Oct-2017]
[32] “Lw7dst”, Estación Meteorológica Automática de Tortuguitas, 2017. [En
línea]. Disponible en: https://goo.gl/dNgjj5. [Accedido: 13-Nov-2017]
[33] “Search - AVHRR”, NOAA CLASS, 2017. [Online]. Available:
https://goo.gl/CgSwPC. [Accedido: 24-Nov-2017]

111 de 139
Apéndice A: Código del software de posicionamiento
//Puertos de Limit Swiths
const int LS1 = 6; //Azimuth
const int LS2 = 7; //Elevacion
//Puertos del motor de azimuth
const int DIR2 = 5; //DIR de azimuth
const int ENA2 = 8; //ENA de azimuth
const int PUL2 = 3; //PUL de azimuth
//Puertos del motor de elevación
const int DIR1 = 12; //DIR de elevacion
const int ENA1 = 13; //ENA de elevacion
const int PUL1 = 9; //PUL de elevación
//Configuracion
float Parameters[4];
char var = 0, LS1_R, LS2_R;
float Az_Speed, El_Speed, Az_Steps, El_Steps;
//Grados por default del motor
float E = 1.8; //Grados/Paso del motor de elevación;
float F = 1.8 ; //Grados/Paso del motor de azimuth
//Variables para el cálculo de direcciones y velocidades
double mD = 0;
int Az1 = 0;
int Az2 = 0;
int PAz2 = 0;
int Az3 = 0;
int Az4 = 0;
double Vaz =0;
int El1 = 0;
int El2 = 0;
int El3 = 0;
double Vel =0;
//Variables de operación durante movimiento
int m = 0;
int n =0;
double o = 0;
double p = 0;
double q = 0;
double r = 0;
void setup() {
Serial.begin(9600);
pinMode(LS1, INPUT);
pinMode(LS2, INPUT);
pinMode(DIR1, OUTPUT);
pinMode(ENA1, OUTPUT);
pinMode(PUL1, OUTPUT);
pinMode(DIR2, OUTPUT);

112 de 139
pinMode(ENA2, OUTPUT);
pinMode(PUL2, OUTPUT);
Serial.println("Introduzca Valor Inicial Azimuth (en deg): ");
}
char rx_byte = 0;
String rx_str = "";
boolean not_number = false;
void loop() {
if (Serial.available() > 0) { // se ha introducido algún caracter
rx_byte = Serial.read(); // obtener el caracter introducido
if ((rx_byte >= '0') && (rx_byte <= '9')) {
rx_str += rx_byte;
}
else if (rx_byte == '\n') {
// end of string
if (not_number) {
Serial.println("No es un numero");
}
else {
Parameters[var] = rx_str.toFloat();
Serial.println(Parameters[var]);
switch(var){
case 0:
Serial.println("Introduzca el Valor Final del Azimuth: ");
break;
case 1:
Serial.println("Introduzca el Valor Maximo de la Elevacion: ");
break;
case 2:
Serial.println("Introduzca el Tiempo (en minutos): ");
break;
case 3:
Serial.println("Velocidad del Motor en Azimuth: ");
mD = (Parameters[3]*60000); //El tiempo, que fue indicado en
//minutos, ahora se convierte a
//milisegundos debido a que la
//función delay funciona en
//milisegundos
Az1 = (Parameters[0]/F); //Esta es la cantidad de pasos que
//hay que dar hasta el azimuth
//inicial
Az2 = (Parameters[1] - Parameters[0]); // Este será el
//desplazamiento en Azimuth este
//número puede ser positivo o
//negativo.
//Usaremos el signo para determinar EL desplazamiento del motor
//Si es negativo, es a la izquierda, si es positivo, es a la
//derecha.

113 de 139
PAz2 = abs(Az2); //Lo convertimos a positivo para calcular
Az3 = PAz2/F; //Esta es la cantidad de pasos en Azimuth
Az4 = Az3; //Guardamos esta variable en otra para usar en una
//función que nos identifique cuándo la variable
//ha dado todo su giro en azimuth
Vaz = mD/Az3; //Este es el desplazamiento en azimuth en
//milisegundos/paso
El1 = (Parameters[2]/E); //Esta es la cantidad de pasos que
//hay que dar hasta la elevación
//máxima
El2 = El1; //Adicionalmente guardamos este valor para crear una
//función que nos identifique cuándo se ha llegado
//a la elevación máxima
El3 = 2*El1; //Creamos este valor para saber cuántos pasos
//debería dar el motor para subir y bajar
Vel = mD/(2*El1); //Este es el desplazamiento en elevación
//medido en milisegundos/paso está dividido entre
//dos porque la elevación máxima se alcanza en la
//mitad del recorrido y luego se baja hasta 0
Serial.print(Vaz, 4);
Serial.println(" mS/Paso");
Serial.println("Velocidad del Motor en Elevacion: ");
Serial.print(Vel, 4);
Serial.println(" mS/Paso");
Stepper_Movement();
break;
}
}
not_number = false; // reset flag
rx_str = ""; // clear the string for reuse
if (var <4){
var ++;
}
else{
var = 0;
Serial.println("Introduzca Valor Inicial Azimuth: ");
}
}
else {
// non-number character received
not_number = true; // flag a non-number
}
} // end: if (Serial.available() > 0)
}

114 de 139
void Stepper_Movement(){
Serial.println("Desplazamiento iniciado: ");
//desplazar al azimuth inicial
Desp_Az1 ();
//Iniciar desplazamiento
if(Vel > Vaz){ goto VelMayor;}
else if (Vel < Vaz){goto VelMenor;}
else if (Vel = Vaz) {goto VigualV;}
VelMenor: Serial.println("Vel es menor: ");
n = 0;
m = 1;
goto PasoVel;
VelMayor: Serial.println("Vel es mayor: ");
m =0;
n = 1;
goto PasoVaz;
VigualV: Serial.println("Vel es igual a Vaz: ");
m =0;
n = 1;
goto PasoIgual;
PasoVel: Serial.println("Paso Vel: ");
delay (Vel); //Esto creará un delay de la
//duración de Vel menos los 4 milisegundos
//que el motor da el paso
Rotar_El();
El2 = El2 - 1; //El estado inicial de El2 es
//positivo pero a medida que demos pasos se
//volverá más negativo
n = n + 1;
//aumentamos el valor de n para la función comp
//Verificamos ya llegamos a los límites
if (n >= El3 && m >= Az3){ goto Puesta0;}
else{goto CompO;}
PasoVaz: delay (Vaz);
//Esto creará un delay de la duración de Vaz
Rotar_Az();
m = m +1; //Se aumenta el resultado de esta
//variable para usarla en la función comp
if (n > El3 && m > Az3){ goto Puesta0;}
else{goto CompQ;}
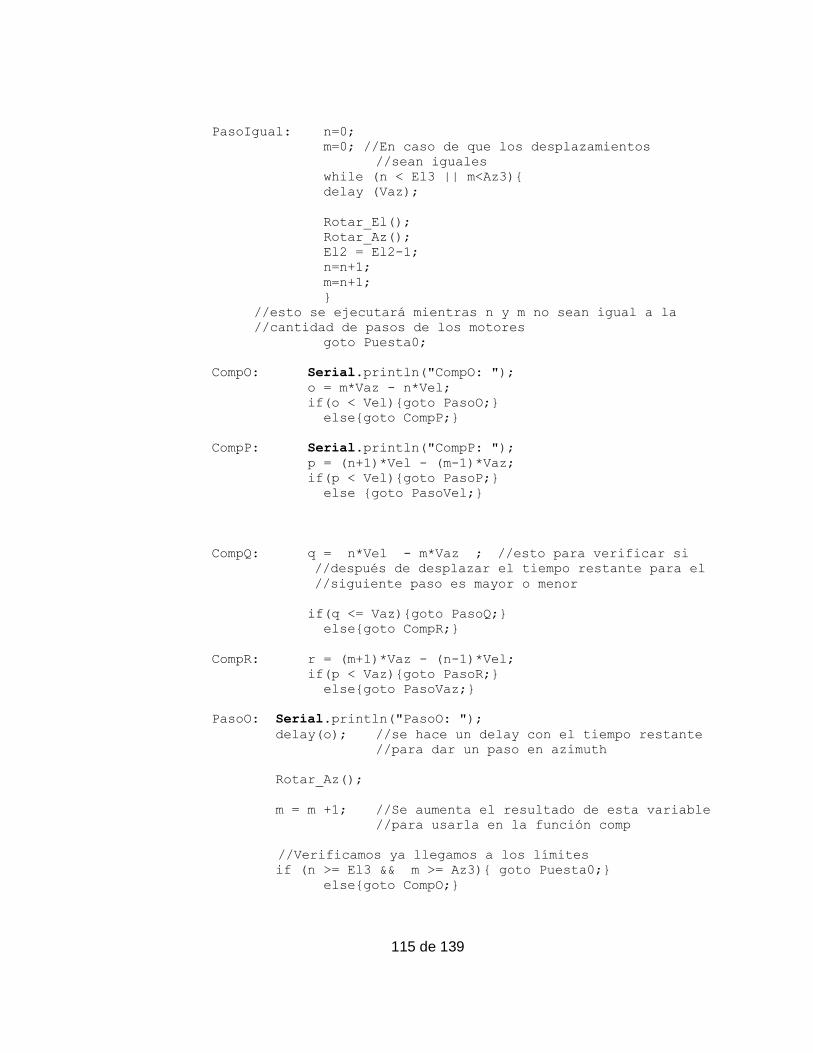
115 de 139
PasoIgual: n=0;
m=0; //En caso de que los desplazamientos
//sean iguales
while (n < El3 || m<Az3){
delay (Vaz);
Rotar_El();
Rotar_Az();
El2 = El2-1;
n=n+1;
m=n+1;
}
//esto se ejecutará mientras n y m no sean igual a la
//cantidad de pasos de los motores
goto Puesta0;
CompO: Serial.println("CompO: ");
o = m*Vaz - n*Vel;
if(o < Vel){goto PasoO;}
else{goto CompP;}
CompP: Serial.println("CompP: ");
p = (n+1)*Vel - (m-1)*Vaz;
if(p < Vel){goto PasoP;}
else {goto PasoVel;}
CompQ: q = n*Vel - m*Vaz ; //esto para verificar si
//después de desplazar el tiempo restante para el
//siguiente paso es mayor o menor
if(q <= Vaz){goto PasoQ;}
else{goto CompR;}
CompR: r = (m+1)*Vaz - (n-1)*Vel;
if(p < Vaz){goto PasoR;}
else{goto PasoVaz;}
PasoO: Serial.println("PasoO: ");
delay(o); //se hace un delay con el tiempo restante
//para dar un paso en azimuth
Rotar_Az();
m = m +1; //Se aumenta el resultado de esta variable
//para usarla en la función comp
//Verificamos ya llegamos a los límites
if (n >= El3 && m >= Az3){ goto Puesta0;}
else{goto CompO;}

116 de 139
PasoP: Serial.println("Paso P: ");
delay(p); //se hace un delay con el tiempo restante
//para dar un paso en elevación
Rotar_El ();
El2 = El2 - 1; //El estado inicial de El2 es positivo
//pero a medida que demos pasos, lo iremos
//volviendo más negativo
n = n + 1;//aumentamos el valor de n para la función comp
//Verificamos ya llegamos a los límites
if (n >= El3 && m >= Az3){ goto Puesta0;}
else{goto CompO;}
PasoQ: Serial.println("Paso Q: ");
delay(q); //se hace un delay con el tiempo restante
//para dar un paso en azimuth
Rotar_El();
El2 = El2 - 1;
n = n +1; //Se aumenta el resultado de esta variable
//para usarla en la función comp
//Verificamos ya llegamos a los límites
if (n >= El3 && m >= Az3){ goto Puesta0;}
else{goto CompQ;}
PasoR: Serial.println("Paso R: ");
delay(r);
Rotar_Az();
m = m +1; //Se aumenta el resultado de esta variable
//para usarla en la función comp
if (n >= El3 && m >= Az3){ goto Puesta0;}
else{goto CompQ;}
Puesta0: Serial.println("*****Puesta a 0****** ");
while((LS1_R == HIGH) || (LS2_R == HIGH)){
LS1_R = digitalRead(LS1);
if(LS1_R == HIGH){
analogWrite(PUL_AZ, 128);
}
LS2_R = digitalRead(LS2);
if(LS2_R == HIGH){
analogWrite(PUL_EL, 128);
}
}
digitalWrite(PUL_AZ, HIGH);
digitalWrite(PUL_EL, HIGH);
goto Start;
}
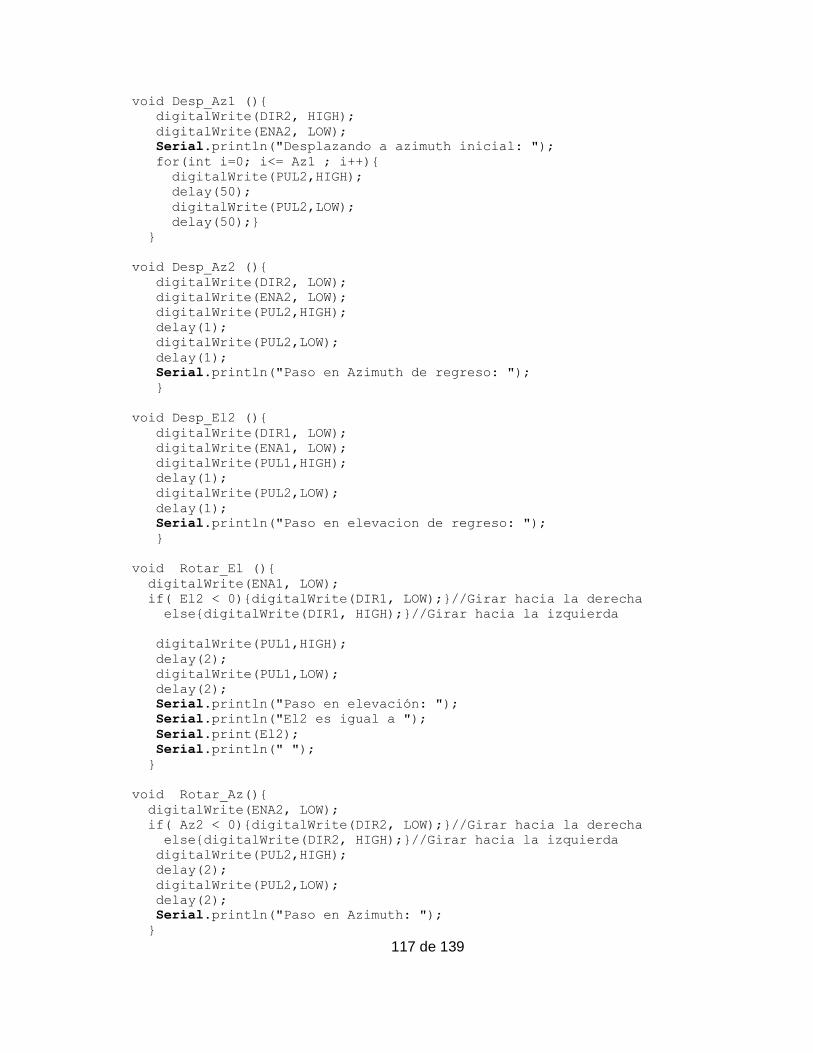
117 de 139
void Desp_Az1 (){
digitalWrite(DIR2, HIGH);
digitalWrite(ENA2, LOW);
Serial.println("Desplazando a azimuth inicial: ");
for(int i=0; i<= Az1 ; i++){
digitalWrite(PUL2,HIGH);
delay(50);
digitalWrite(PUL2,LOW);
delay(50);}
}
void Desp_Az2 (){
digitalWrite(DIR2, LOW);
digitalWrite(ENA2, LOW);
digitalWrite(PUL2,HIGH);
delay(1);
digitalWrite(PUL2,LOW);
delay(1);
Serial.println("Paso en Azimuth de regreso: ");
}
void Desp_El2 (){
digitalWrite(DIR1, LOW);
digitalWrite(ENA1, LOW);
digitalWrite(PUL1,HIGH);
delay(1);
digitalWrite(PUL2,LOW);
delay(1);
Serial.println("Paso en elevacion de regreso: ");
}
void Rotar_El (){
digitalWrite(ENA1, LOW);
if( El2 < 0){digitalWrite(DIR1, LOW);}//Girar hacia la derecha
else{digitalWrite(DIR1, HIGH);}//Girar hacia la izquierda
digitalWrite(PUL1,HIGH);
delay(2);
digitalWrite(PUL1,LOW);
delay(2);
Serial.println("Paso en elevación: ");
Serial.println("El2 es igual a ");
Serial.print(El2);
Serial.println(" ");
}
void Rotar_Az(){
digitalWrite(ENA2, LOW);
if( Az2 < 0){digitalWrite(DIR2, LOW);}//Girar hacia la derecha
else{digitalWrite(DIR2, HIGH);}//Girar hacia la izquierda
digitalWrite(PUL2,HIGH);
delay(2);
digitalWrite(PUL2,LOW);
delay(2);
Serial.println("Paso en Azimuth: ");
}

118 de 139
Apéndice B: NEMA 17 Datasheet

119 de 139
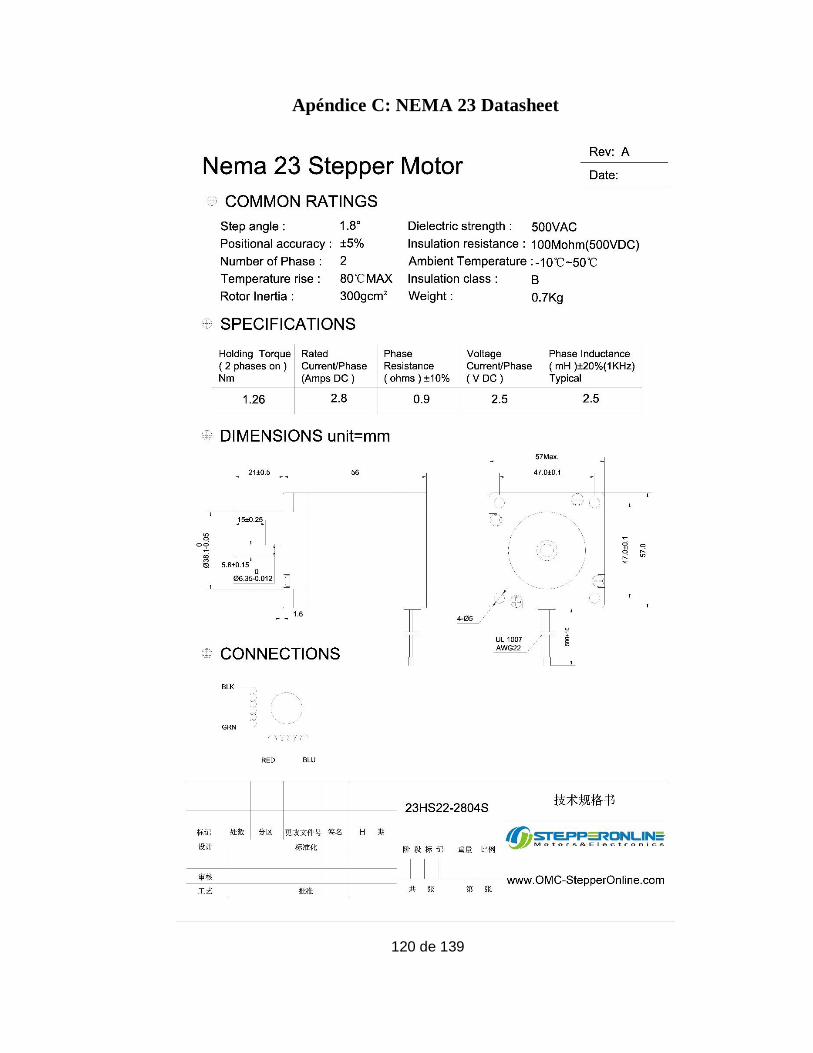
120 de 139
Apéndice C: NEMA 23 Datasheet

121 de 139
Apéndice D: Anteproyecto
Universidad Acción Pro Educación y Cultura UNAPEC
DECANATO DE INGENIERÍA E INFORMÁTICA
ESCUELA DE INGENIERÍA
Diseño de un Sistema de Captura y Análisis de Imágenes
Satelitales en el Laboratorio de Comunicaciones de
UNAPEC
Sustentantes
Ángel Iván Gerónimo Féliz
Matrícula 2013-2826
Michelle Fernández
Matrícula 2012-0792
Sherman Rosario
Matrícula 2013-2925
TRABAJO DE GRADO PARA OPTAR POR EL TÍTULO DE INGENIERO EN
ELECTRÓNICA DE COMUNICACIONES
Santo Domingo, D.N.
2017

122 de 139
Índice
1. Introducción 123
2. Justificación de la investigación 124
3. Planteamiento del problema 124
4. Objetivos 125
5. Marco referencial 126
5.1. Marco teórico 126
5.2. Marco conceptual 130
6. Diseño metodológico 133
6.1. Tipo de investigación 133
6.2. Métodos de investigación 134
6.3. Técnicas de investigación 136
7. Fuentes de documentación 138
7.1. Fuentes Primarias: 138
7.2. Secundarias: 138
8. Esquema preliminar 139

123 de 139
1. Introducción
El desarrollo de los sistemas electrónicos y digitales permitió que la humanidad
acceda a cantidades de información prácticamente ilimitadas. Ejemplo de esto son los libros
electrónicos, conferencias, noticias, videojuegos en línea, artículos de salud, consejos de
cocina, compra y venta de bienes, que son solo unas pocas cosas dentro la infinidad de
posibilidades que ofrecen las telecomunicaciones actuales. Muchos de estos recursos pueden
ser aprovechados gracias al desarrollo de diversas tecnologías de comunicación.
Entre los principales avances de la tecnología está el satélite artificial al que se debe
una enorme cantidad de innovaciones en Televisión, Telefonía, Seguridad Militar,
Navegación, Ciencias Espaciales y Meteorología. Ésta última, es de gran interés debido a la
repercusión que tiene el clima en la actividad humana y al cambio climático que el planeta
experimenta. Varias agencias de investigación han colocado en órbita avanzados satélites
meteorológicos que se encargan de monitorear el clima en diversas regiones de la tierra.
En el continente americano, los más conocidos son los satélites meteorológicos del organismo
estadounidense NOAA (Administración Nacional Oceánica y Atmosférica por sus siglas en inglés).
Estos transmiten señales electromagnéticas que al ser decodificadas resultan en imágenes de la región
en donde se esté recibiendo la señal. De estas regiones, el Caribe es un terreno en el cual se hace una
constante vigía del medioambiente debido a la cantidad de sistemas de tormentas que se forman en
este tramo marítimo y que por las corrientes de viento son guiados por las islas caribeñas hasta
territorio continental. De estas islas, la República Dominicana cuenta con la asesoría de la NOAA en
forma de observaciones realizadas por satélites que sirven para obtener datos sobre las condiciones
atmosféricas de la región caribeña. A su vez, las observaciones proporcionadas por los satélites de la
NOAA sirven para una gran cantidad de aplicaciones debido a que sus sensores electromagnéticos
captan un amplio espectro de la radiación emitida por los cuerpos sobre la superficie terrestre. Una
clase especial de estos satélites son los de órbita baja polar, que brindan imágenes de alta resolución
de forma gratuita.

124 de 139
2. Justificación de la investigación
La investigación busca, mediante la implementación de sistemas electrónicos y
computacionales desarrollar herramientas que permitan obtener información a través de
imágenes satelitales sobre la flora y el medio ambiente de la República Dominicana. Esto
permite la exploración de las tecnologías más actuales para la obtención y decodificación de
las señales de radio que son producidas a cientos de kilómetros de la superficie terrestre y
enviada como una tenue onda electromagnética casi imperceptible por los demás dispositivos
electrónicos. Este trabajo ayudará a futuros estudios cuya temática principal esté orientada a
la parte práctica del aprovechamiento de la información ofrecida por estos ingenios
espaciales.
3. Planteamiento del problema
Encontrar fuentes que se dediquen a captar las imágenes proporcionadas por satélites
es costoso debido a las limitaciones técnicas de armar un sistema para la producción de las
mismas, además de la inversión de tiempo y dinero que representa el mantenerlo operando.
Un ejemplo de esto es el país caribeño, República Dominicana no cuenta con puntos de
observación para estos satélites ni de los mismos organismos gubernamentales de
meteorología o medioambientales. Esto no ocurre por descuido, sino por la falta de
aplicaciones, pues las imágenes entregadas por satélites meteorológicos de órbita
geoestacionaria hasta el momento muestran toda información necesaria para el estudio y
predicción del clima.
Tal temática originó el deseo por aprovechar las anteriormente mencionadas
imágenes meteorológicas para que se pueda con otras investigaciones realizar estudios de la
cobertura boscosa del territorio y conseguir de esta forma una herramienta que permita tanto
en este país como en otros hacer un seguimiento del efecto que las políticas
medioambientales e incluso valerse de la frecuencia de actualización para dar aviso sobre
las zonas que están siendo deforestadas. Por lo que el presente proyecto trata sobre el diseño

125 de 139
de un sistema que permita la captura de imágenes satelitales mediante la tecnología conocida
como Radio Definido por Software (SDR). Dichas imágenes serán procesadas digitalmente
y que pudieran ser utilizadas en estudios posteriores por ejemplo en la determinación del
cambio en la densidad boscosa en de la frontera dominicana y así obtener datos valiosos que
aceleren la implementación de medidas para cuidado del entorno natural en la República
Dominicana.
4. Objetivos
4.1. Objetivo general de investigación
Diseñar de un sistema que capture imágenes satelitales y las procese de forma digital.
4.2. Objetivos específicos
5. Determinar la estructura de un sistema de análisis de imágenes satelitales.
6. Diseñar y construir las antenas apropiadas para la buena captura de la señal satelital
en la banda de VHF (para imágenes de baja resolución) y para la banda de SHF
(para imágenes de alta definición).
7. Diseñar y construir el sistema de seguimiento satelital.
8. Diseñar y construir el sistema de computación para la recomposición de la señal
satelital en una imagen.
9. Diseñar y programar la aplicación que realice el procesamiento digital de las
imágenes.

126 de 139
5. Marco referencial
5.1. Marco teórico
Se puede definir al satélite como cualquier objeto físico que orbita alrededor de otro
(Frenzel, 2003), normalmente de mayor tamaño, al que se le llama cuerpo principal. Muchos
ejemplos en la naturaleza se comportan de esta manera, como en nuestro propio sistema solar
en el cual los planetas orbitan alrededor del sol. Cuando un satélite es colocado en órbita por
el hombre, se le denomina satélite artificial y ya sea que se encuentre rotando la tierra
(terrestre), la luna (lunar), o alrededor de otro astro de este u otro sistema solar, los ingenios
tecnológicos a los que normalmente nos referimos como satélites son usados para
aplicaciones en terrenos como la investigación científica, investigación militar, meteorología
o para fines de telecomunicaciones debido a que el espacio es un medio apto para la
transmisión de ondas electromagnéticas (aun a la distancia que se encuentran). Gracias a esto,
los satélites mantienen comunicación funcional basándose en eficientes antenas de alta
ganancia que reciben ondas electromagnéticas cargadas de información desde estaciones
ubicadas en la tierra (estaciones terrenas).
Unas de las aplicaciones más comunes de esta vía de comunicación es la captura de
imágenes satelitales. Al hablar sobre la imagen se hace referencia a la representación de un
objeto real, conceptual o ideal mediante el uso de un estímulo que pueda ser captado por los
sentidos. La imagen satelital es una representación captadas por sensores remotos de una
realidad que es observada a través de las interferencias de ondas electromagnéticas en la
superficie de la tierra y, al igual que cualquier imagen, está compuesta por estructuras que
adquiere al momento de ser plasmada (espacial, la temporal y la relacional) y sirven para
diferenciar una imagen de otra o de ella misma en otro momento. La recepción de esta
información puede ser llevada a cabo mediante distintas técnicas. Una de las más comunes
es la demodulación de esta señal mediante un complejo sistema electrónico que realice las
operaciones de mezclado sobre la señal recibida en la búsqueda de obtener una representación
fidedigna de los datos obtenidos por el satélite, todo esto antes de salir del dominio análogo

127 de 139
de la electrónica. Sin embargo, uno de los métodos más innovadores para dicha labor es el
radio definido por software (SDR, siglas de Software Defined Radio) que es realizada por un
único dispositivo de hardware cuya función es la de muestrear la señal de entrada de la antena
y aplicar operaciones matemáticas que devuelven una información filtrada, amplificada y
desmodulada que otro sistema puede utilizar.
De esta forma se consigue que un dispositivo inteligente, como puede ser un
microprocesador, realice mediante software y programación todas las operaciones que
realizaría un dispositivo electrónicamente más complejo como puede ser un receptor de radio.
Continuando con esta misma tendencia de la digitalización y del procesamiento
computarizado, las imágenes satelitales captadas mediante la tecnología del SDR pueden ser
analizadas mediante algoritmos de cálculo, lo que se conoce como procesamiento digital de
señales (DSP, siglas de Digital Signal Processing). Esto se define como la acción de someter
a un proceso de transformación, como el someter datos o materiales a una serie de
operaciones programadas. No obstante, la palabra “digital” tiene múltiples significados según
el contexto en el que se use. El concepto fundamental de la palabra digital se define como
aquello que es referente a los números. De esta definición se parte al entorno técnico donde
este adjetivo designa aquellos aparatos o sistemas que presentan información mediante el uso
de señales de valores discretos. A su vez, el adjetivo “discreto” denota aquello que no
presenta exceso, es decir, que utiliza solo lo necesario y nada más. En el campo de las
matemáticas se usa este calificativo para designar a toda sucesión de números que toma
“valores distintos y separados”. Por tal razón, un sistema de procesamiento digital es aquel
que opera y presenta datos discretos, distintos y separados. Además de esto, el adjetivo
“digital” dota al sustantivo que complementa con un margen de precisión acotado, lo que
significa que los dígitos, que son distintos y separados, están divididos unos de otros por
infinitos valores intermedios mientras que los dígitos en sí son números racionales y tienen
una resolución constante.

128 de 139
Por otro lado, una señal es un signo, una indicación o gesto que representa algún
referente. La señal es la imagen de un concepto o aviso que se quiere dar a conocer o
transmitir. La señal puede ser gráfica en la forma de ícono o figura, pero también puede ser
conceptual en la forma de un gesto efímero que resulte de la manipulación de la naturaleza
de una entidad. Un buen ejemplo de este concepto puede ser el silbar, se puede variar la
tonalidad (frecuencia) del sonido producido al hacer pasar aire por la cavidad bucal y
mediante distintos tonos se puede codificar un mensaje. Ésta es una técnica que fue
desarrollada de forma paralela por culturas de todo el mundo. Por lo tanto, una señal se puede
definir como un punto intermedio entre el mensaje y el medio, pues la señal por sí sola no es
el mensaje, sino que porta el mensaje, pero tampoco es el medio, pues es una transformación
del medio.
Dado esto, el procesamiento digital de señales puede entenderse como el someter una
señal a un proceso de transformación en el cual primero es transformada a un dominio
discreto en el cual se representa como una serie de valores numéricos racionales y discretos
para luego aplicar operaciones matemáticas dominadas por una mecánica de sistemas con el
fin de obtener una nueva serie de valores numéricos que sean la imagen de esta señal al pasar
por el proceso de transformación.
Antecedentes de la investigación
En 2005 fue presentado en la Facultad de Ingeniería de la Universidad APEC, la
monografía “Estudio y Diseño de un Sistema de Recepción de Imágenes de Satélites NOAA”
por Evis Román Castillo, como requisito para optar por el título de Ingeniero electrónico en
Comunicaciones.
La investigación se centraba en la recepción de imágenes en baja resolución enviadas
en formato APT por los satélites NOAA, con la finalidad de obtener datos meteorológicos
del país en tiempo real. Se explica el funcionamiento de distintos programas informáticos
que pueden ser utilizados para rastrear los satélites y capturar las imágenes. Luego, se

129 de 139
detallan las medidas y las especificaciones de los materiales necesarios para la construcción
de la antena receptora. De la misma forma, se trata el diseño de una interfaz demoduladora
que permita recuperar la información transportada por la señal del satélite. La recolección de
datos se llevó a cabo a través de la consulta de material didáctico en distintas bibliotecas,
foros de investigación en Internet, además de la utilización de los laboratorios de Ingeniería
Electrónica de la Universidad INTEC.
Este estudio logró proveer un método a seguir si se desea capturar imágenes satelitales
en un computador personal. Propone técnicas de recolección de imágenes satelitales y
software para su posterior procesamiento.
Luego, en 2007 fue presentada en la escuela de tecnología de la facultad de
humanidades y ciencias de la Universidad APEC de santo domingo, el trabajo monográfico
Pre-procesamiento de Imágenes Satelitales Captadas por Sensores Remotos en el Área del
Caribe por Carlos R. Núñez Céspedes y Ángelo A. Sánchez Peña.
Esta investigación busca hacer un análisis de las operaciones de cómputo necesarias
para que una imagen obtenida a través de un enlace de radiofrecuencia establecido con un
satélite meteorológico pueda ser utilizado para operaciones de análisis, lo cual el auto llama
pre-procesamiento de imágenes. A su vez, la monografía explica distintos métodos de
corrección de los defectos producidos en las imágenes durante su composición en el satélite,
en el medio de su transmisión a la estación terrena y durante su recepción. Luego se expone
los resultados de distintas pruebas realizadas en sistemas de software que escanea las
imágenes en busca de posibles defectos y aplican los algoritmos de corrección necesaria. Las
pruebas permitieron demostrar los beneficios de realizar retoques digitales sobre la imagen
antes de proceder con las labores de extracción de datos sobre las mismas al obtener imágenes
de mayor calidad con las cuales es más fácil obtener información.
Este documento ilustró el camino apropiado para el tratamiento de las imágenes que
serán captadas por el sistema que plantea desarrollar la presente información.

130 de 139
5.2. Marco conceptual
Entender el concepto de “Satélite” podría resultar intuitivo para la mayoría de las personas,
pues desde pequeños, se nos enseña que se existen objetos en el espacio que orbitan alrededor
de otros por el efecto de la fuerza de la gravedad. Según el Diccionario de Energía (Edición
expandida), un satélite es cualquier cuerpo celeste, natural o artificial, que gira en una órbita
alrededor de un planeta. Bruce R. Elbert (2008) define un satélite de comunicaciones como:
“una estación repetidora de microondas que permite a dos o más usuarios en tierra, el
intercambiar información en varias formas”.
Órbita geoestacionaria: Estas órbitas son circulares y están orientadas en el plano del ecuador
de la tierra. En dichas trayectorias, los satélites parecen estar estacionados, es decir, en una
posición fija.
Órbita síncrona al sol: Es un tipo de órbita en la que se combina la altitud y la inclinación
para lograr que un satélite sobrevuele una zona terrestre en un determinado tiempo solar y se
mantenga haciendo este paneo por toda la superficie del cuerpo principal.
Ondas electromagnéticas Son oscilaciones del campo eléctrico y magnético asociadas con la
propagación de la radiación electromagnética. Los satélites envían y reciben información
mediante el uso de este fenómeno físico.
Espectro electromagnético: Es el rango de longitudes de onda o frecuencias en las cuales
cualquier otra forma de radiación electromagnética puede oscilar.
Refracción: Es el cambio en la dirección de propagación cuando una onda pasa de un medio
a otro de densidad distinta.
Frecuencia: Se define como el número de ciclos por segundo de cualquier cosa que oscile.
131 de 139
Antena parabólica: Es un tipo de antena que utiliza un reflector parabólico para direccionar
ondas de radio. Este reflector es una superficie curvada con la forma de la sección transversal
de una parábola.
Modulación de onda: El proceso de alterar la amplitud, frecuencia, fase de una onda o la
velocidad de los electrones en el rayo de electrones, con el objetivo de transmitir información.
Demodulación: Proceso de extracción de información de una onda portadora modulada. Es
la técnica inversa a la modulación.
BPSK: es la forma más simple de la modulación por desplazamiento de fase. En esta, la señal
transmitida es una sinusoidal fija. Tiene una fase fija cuando la data está en un nivel. Cuando
dicha información está en otro nivel, la fase presenta una diferencia de 180°.
QPSK: es un sistema de modulación de señales digitales en una señal portadora de
radiofrecuencia utilizando cuatro estados de fase para codificar dos bits.
Amplificador: Dispositivo que incrementa la fuerza de una señal eléctrica al extraer energía
de otra fuente separada de la que origina la señal.
Ganancia: Relación entre la amplitud de la señal de salida respecto a la señal de entrada.
Filtro: Son circuitos los cuales realizan funciones de procesamiento de señales,
específicamente para remover componentes de frecuencia no deseados de la señal, para
intensificar las deseadas, o ambos.
Mezclador: Es un dispositivo activo o pasivo de tres puertos que puede modular o demodular
una señal. El propósito es cambiar la frecuencia de una señal electromagnética mientras se
preservan las otras características de la señal inicial.

132 de 139
APT (Automatic Picture Transmission): Es un sistema analógico de transmisión de imágenes
desarrollado para ser utilizado en satélites del clima.
HRPT (High Resolution Picture Transmission): Es un protocolo de transmisión de imágenes
en alta resolución el cual es utilizado normalmente por los satélites climáticos para el envío
de información. Este opera en la banda L en el rango 1.670 – 1.710 GHz y tipos de
modulación BPSK y QPSK.
SDR (Software Defined Radio): Es un sistema de radiocomunicaciones donde los
componentes que comúnmente se utilizan en hardware (mezcladores, filtros, amplificadores,
moduladores/demoduladores) son implementados en software en una computadora personal
o en un sistema integrado.
NOAA: Es una agencia científica del Departamento de Comercio de los Estados Unidos
cuyas actividades se centran en las condiciones de los océanos y la atmósfera. Entre muchas
cosas, estos gestionan y controlan varios satélites del clima, que son utilizados por los
científicos para monitorear las condiciones de la superficie y llevar a cabo estudios.

133 de 139
6. Diseño metodológico
6.1. Tipo de investigación
Este estudio se inicia como un análisis descriptivo. Hernández, Fernández y Baptista
(2006), definen el estudio descriptivo de la siguiente forma: “Los estudios descriptivos
únicamente pretenden medir o recoger información de manera independiente o conjunta
sobre los conceptos o variables a las que se refiere, esto es, su objetivo no es indicar cómo se
relacionan las variables medidas.” Con esto, los autores declaran que un estudio puede tener
la finalidad de realizar la simple descripción del fenómeno bajo estudio. Atendiendo a esto,
se opta por adoptar un enfoque característico descriptivo para el desarrollo de este estudio.
Esto está sustentado en que el estudio parte desde la descripción de los elementos que
componen un modelo y luego plantear las modificaciones necesarias para que dichos
elementos interactúen.
Sin embargo, el carácter de este estudio es fundamentalmente exploratorio. Este tipo
de investigación se describe como aquel en que se amerita un acercamiento más detallado al
objeto de estudio. En esta investigación será necesario un acercamiento a la estructura de los
elementos que compondrán el sistema planteado, pues, aunque existe una amplia
documentación sobre los elementos por separados realizando funciones autónomas o como
parte de otros sistemas, el estudio tendrá la tarea de analizar el comportamiento de estas
piezas al hacer que interactúen entre sí, realizando pruebas y ajustes con el fin de obtener
datos que sustenten el desarrollo de la técnica de análisis.
Por lo anterior se llega a la conclusión tiene carácter experimental. Así como definen
Hernández, Fernández y Baptista (2006), al hablar sobre la concepción de experimento como
una actividad que requiere la manipulación intencional de una acción para analizar sus
posibles resultados. Este diseño se postula como el más útil para afrontar los objetivos de la
investigación, los cuales impulsan al equipo a estudiar el desarrollo de adaptaciones entre
distintos sistemas electrónicos o informáticos con el fin de complementar la estructura de un
prototipo. Junto a esto, como precisan estos autores parafraseando a Creswell (2005), “los

134 de 139
experimentos manipulan tratamientos, estímulos, influencias o intervenciones… para
observar sus efectos sobre otras variables”, esta investigación busca desarrollar técnicas de
análisis, lo cual conlleva implementar métodos de tratamiento de información. Es debido a
esto que las variables independientes de este estudio son las modificaciones que se realicen
tanto a los, como a las técnicas de análisis que se desarrollen. Mientras que las variables
dependientes serán los patrones de comportamiento de dichos sistemas y los resultados
obtenidos en estas técnicas de análisis.
A su vez, este estudio utiliza una de las tipologías más comunes en el diseño
experimental conocida como experimento puro. Para que una investigación pueda
reconocerse como experimento puro, debe contar por lo menos con un grupo de comparación
y que este grupo cuente con condiciones equivalentes a las del otro grupo al momento de
aplicar el estímulo. Debido a que el objetivo de esta investigación busca adaptabilidad de
tecnologías, solo recurre a realizar las pruebas en cuestión para obtener datos sobre la
respuesta al estímulo, sin depender de una prueba previa al mismo, momento en el que se
contempla que no existe variación entre los grupos por la naturaleza de los mismos. Como
resultado de esto, estos experimentos tienen la estructura de “diseño con grupo y posprueba”.
6.2. Métodos de investigación
Para el desarrollo de este trabajo investigativo se utilizarán los métodos de observación,
deducción y análisis.
La observación es la adquisición activa de información a partir del sentido de la vista,
está se trata de detectar y asimilar información de cualquier dato recogido durante este
proyecto. A sabiendas de esto pretendemos observar y valorar el comportamiento que tienen
los elementos que estamos manipulando.
Cuando se habla de método deductivo se refiere a aquel método donde se va de lo
general a lo específico. Este comienza dando paso a los datos en cierta forma válidos, para

135 de 139
llegar a una deducción a partir de un razonamiento de forma lógica o suposiciones; es decir,
se refiere a un proceso donde existen determinadas reglas y procesos donde gracias a su
asistencia, se llegan a conclusiones finales partiendo de ciertos enunciados o premisas. Entre
sus principales características está el que se apoya del ir correlacionando conocimientos que
suponen ser verdaderos para derivar nuevas nociones.
El método analítico es aquel método de investigación que consiste en la separación de
un todo, la descomposición de sus partes para observar las causas, la naturaleza y los efectos.
Es necesario conocer la naturaleza del fenómeno y objeto que se estudia para comprender su
esencia. Este método nos permite conocer más del objeto de estudio, con lo cual se puede:
explicar, hacer analogías, entre otras. El análisis va de Ío concreto a lo abstracto ya que
mantiene el recurso de la abstracción puede separarse las partes del todo, así como sus
relaciones básicas que interesan para su estudio intensivo.
Dado esto, el método de observación será utilizado para obtener información
descriptiva de los hechos. Luego, el proceso de deducción generaliza las explicaciones y
descripciones planteadas para aplicarlas. Por último, analizar los resultantes de las fases
anteriores para verificar cuáles de las teorías fueron validadas por la investigación o las
pruebas.

136 de 139
6.3. Técnicas de investigación
El test
Dado que la observación es un método empírico por excelencia, la investigación se
servirá del test como técnica de tabulación con la cual se llevará el registro de parámetros
como son las características de recepción de distintas antenas en polarización circular o los
resultados de las operaciones de filtrado sobre las imágenes resultantes del sensado remoto.
El test surge de la entrevista y de la encuesta con el objetivo de identificar rasgos previamente
definidos o determinar rasgos no contemplados dentro de las características del objeto de
estudio. Esto nos lleva a medir sus actitudes como resultado de su mera observación.
Como pautas para desarrollar test efectivos se tiene deben cumplir con las siguientes
condiciones:
● Deben ser objetivos: a modo que deben evitar la ambigüedad de sus
resultados. Esto permite que las deducciones realizadas a partir de los mismos
tengan confiabilidad.
● Deben ser sencillos: lo que significa que los tópicos desarrollados en el test
serán lo más explícitos posible, de modo que no requieran grandes análisis a
partir de otros datos, que sus respuestas sean consecuencia de la mera
realización de la observación.
● Deben ser económicos: las limitaciones de presupuesto y tiempo son una
constante en el documento, lo que requiere que los tópicos indagados por el
test puedan ser conseguidos sin exceder el límite de tiempo para llevar a cabo
el estudio o el capital de la investigación.
● Deben ser esenciales: cada uno de los tópicos recabados debe cumplir un
objetivo específico al momento o en el futuro durante la investigación, de
modo que se debe evitar recabar información innecesaria.

137 de 139
La experimentación
La experimentación es uno de los más grandes apoyos del método deductivo, en el
mismo se persigue obtener datos que de otra forma no pueden ser más que suposiciones.
Suele ser el método más complejo y eficaz, lo que significa que conlleva una gran carga de
trabajo y planificación, además de un mayor riesgo, pero si estos son bien desarrollados, los
resultados del experimento son irrefutables, es decir, que solo se puede poner en duda el
desarrollo y planificación del mismo, no sus conclusiones.
El investigador tiene la tarea de crear las condiciones necesarias para representar o
recrear las circunstancias en las que se produce un determinado hecho, siempre teniendo en
cuenta las limitaciones a pequeña, mediana o gran escala del acto que se desea presenciar.
Debe separar correctamente las cualidades que quiere verificar. Además de esto, el
experimento deber reproducible, de modo que los resultados puedan obtenerse en ocasiones
sucesivas o incluso puedan ser tabulados en orden de probabilidades.

138 de 139
7. Fuentes de documentación
7.1. Fuentes Primarias:
● Lillesand, Kiefer, Chipman. Remote Sensing and Image Interpretation, 6ta
Edicion.
● Balanis, Constantine. Antenna Theory: Analysis and Design. Editor Wiley-
Blackwell, 3era Edición.
● Roman Castillo, Evis. Estudio y Diseño de un Sistema de Recepción de Imágenes
de Satélites NOAA en la Universidad APEC, Santo Domingo, D.N. 2005.
● Nuñez, Carlos. Pre-procesamiento de imágenes satelitales captadas por sensores
remotos en el área del Caribe, Santo Domingo, D.N. 2005
● Programa de las Naciones Unidas para el Desarrollo. Informe sobre el
Desarrollo Humano de la República Dominicana 2008
7.2. Secundarias:
[1] Radio definida por software, (s. f). En Wikipedia. Recuperado el 13 de enero de 2017
de https://es.wikipedia.org/wiki/Radio_definida_por_software
[2] Martín, M. (Nov. 2010). En EA1DDO. Recuperado el 13 de enero de 2017 de
http://www.ea1ddo.es/sdr/sdr.html
[3] http://www.ure.es/foro/1-foros-de-radio.html [4] https://es.wikipedia.org/wiki/Satélite_artificial [5] http://comohacer.eu/como-funcionan-los-satelites/ [6] www.satelites.site90.net/Satelites/funcionamiento.html [7]http://laprensa.peru.com/tecnologia-ciencia/noticia-como-llega-informacion-satelites-tierra-26342 [8] https://www.cls.fr/es/segmentos-tierra-y-operaciones/localizacion-y-obtencion-de-datos/ [9] http://www.cosmonautica.es/30.html

139 de 139
8. Esquema preliminar
CAPÍTULO 1 Sistema de recepción de Imágenes
1.1. Recepción
1.1.1. Esquema de comunicación
1.1.2. Frecuencia y Ancho de banda de la señal
1.1.3. Tipo de modulación y Tasa de bit
1.1.4. Satélites a sintonizar
1.1.5. Pasos de los satélites
1.2. Antenas y propagación
1.2.1. Potencia de recepción
1.2.2. Pérdidas de espacio libre: VHF y SHF
1.2.3. Polarización de ondas: VHF y SHF
1.2.4. Antenas: lineales y circulares
1.2.5. Antenas reflectoras: Parábolas
1.3. Procesamiento digital de señales
1.3.1. Pre-procesamiento de la imagen
1.3.2. Reconocimiento digital de formas
1.3.3. Delimitación de zonas bajo estudio
CAPÍTULO 2 Diseño del sistema
2.1. Antena Receptora
2.2. Software
2.3. Resolución de imagen
2.4. Filtrado de la información deseada
2.5. Algoritmo de comparación de resultados
CAPÍTULO 3 pruebas del sistema
3.1. Imágenes capturadas
3.2. Validación de las herramientas usadas
3.3. Comparación con otras imágenes
3.4. Validación con estudio de campo